


при опрокидывании двигателя и остановке ротора, статорные обмотки начинают потреблять большие пусковые токи, которые могут привести к сгоранию изоляции данных обмоток.
4. Рабочая часть механической характеристики между точками А и В показывает величину перегрузочной способности данного асинхронного двигателя.
Свойства асинхронных двигателей.
1. В момент пуска асинхронный двигатель потребляет большой ток ( в 5 – 7 раз больше Iном), что соответствует режиму короткого замыкания. А пусковой вращающий момент – небольшой, так как машина сильно размагничена. Поэтому рекомендуется запускать асинхронные двигатели без механической нагрузки на валу.
2. Асинхронные двигатели, работающие с начальной нагрузкой (тяговые, крановые, лифтовые) имеют фазный ротор, который в момент пуска (4-6 секунд) получает дополнительное питание через 3 контактных кольца.
3. Асинхронный двигатель боится однофазного пуска. Так как при питании однофазным током создается пульсирующее магнитное поле, которое не может раскрутить ротор машины, но двигатель в данном случае потребляет большие пусковые токи, которые могут привести к сгоранию изоляции статорных обмоток.
Примечание: асинхронный двигатель может работать от однофазной сети, но с предварительно раскрученным ротором. При этом величина критического вращающего момента уменьшается, следовательно, двигатель при таком питании обладает меньшей перегрузочной способностью.
4. Асинхронный двигатель боится снижения питающего напряжения. При снижении питающего напряжения на 30% (что вполне допустимо для многих питающих сетей), вращающий момент уменьшается в 2 раза и под действием механической нагрузки на валу ротор может остановиться, что может привести к сгоранию изоляции статорных обмоток из-за действия больших пусковых токов.
5. Для реверсирования асинхронного двигателя достаточно поменять местами любые две питающие фазы.
6. Одной из технических характеристик асинхронного двигателя является коэффициент cosφ,характеризующий дополнительные потери энергии в цепях переменного тока и, вследствие этого, уменьшение КПД (для машин переменного тока мощность Р=U*I*cosφ, cosφ примерно =0.7).
7. Регулировка скорости вращения требует изменения частоты тока f, т.е. дополнительного электронного (тиристорного) оборудования.
Прим. Преимущества асинхронных двигателей:
- Из-за отсутствия коллектора нет проблем с коммутацией и искрением под щетками.
- Простота обслуживания.
- Возможность регулировки мощности с помощью изменения схемы подключения «звездой» и «треугольником».
- Отсутствие изоляции в короткозамкнутых роторах.
- Возможность питания от двух или даже одной фазы.
Дата добавления: 2018-05-10; просмотров: 384;
Похожие статьи:
Статические характеристики асинхронного двигателя. Понятие критического скольжения, момента, мощности. «Опрокидывание» асинхронного двигателя.
Асинхронные машины относятся к классу электромеханических преобразователей, т.е. преобразователей электрической энергии в механическую или механической в электрическую. В первом случае они называются двигателями, а во втором — генераторами. Все электрические машины обладают свойством обратимости и могут осуществлять преобразование энергии в обоих направлениях, поэтому при изучении процессов в машинах пользуются понятиями двигательного и генераторного режимов. Однако при разработке и изготовлении машины оптимизируются для условий работы в одном из режимов и используются в соответствии с назначением. Асинхронные машины не являются исключением из этого правила, но асинхронные генераторы значительно уступают синхронным по многим параметрам и редко используются на практике, в то время как асинхронные двигатели являются самыми распространёнными электромеханическими преобразователями. Суммарная мощность асинхронных двигателей составляет более 90% общей мощности всех существующих двигателей, поэтому в данном курсе мы ограничимся рассмотрением только этого типа машин.
Асинхронные двигатели относятся к бесколлекторным машинам переменного тока или машинам с вращающимся магнитным полем. Название асинхронные (несинхронные) объясняется тем, что в статическом режиме работы скорость вращения ротора (вращающейся части) двигателя отличается от скорости вращения магнитного поля, т.е. ротор и поле вращаются несинхронно.
Причиной широкого распространения асинхронных двигателей является их предельная простота, надёжность и экономичность. Конструкция асинхронных двигателей не претерпела существенных изменений с 1889 года, когда эти двигатели были изобретены М.О. Доливо-Добровольским. Можно сказать, что асинхронные двигатели совместно с синхронными генераторами и трёхфазными линиями передачи и распределения электрической энергии образуют систему передачи механической энергии на расстояние.
В последнее время в связи с появлением полупроводниковых преобразователей частоты для питания асинхронных двигателей область их применения существенно расширилась. Они стали широко применяться в высокоточных приборных приводах там, где ранее использовались в основном двигатели постоянного тока.
При анализе процессов в асинхронном двигателе и в справочных данных используют понятие скольжения 
 ) и ротора (
) и ротора (  ), отнесённой к скорости вращения поля. При известной частоте сети и числе пар полюсов по скольжению можно определить скорость вращения. Например, скорость вращения двигателя с двумя парами полюсов при питании от промышленной сети (n = 60*50/2 = 1500 об/мин) и скольжении 0,05 составляет 1425 об/мин. Скольжение при неподвижном роторе (n = 0) равно единице, а при синхронном вращении (n =n1) — нулю. Скорость или частота вращения магнитного поля называется также синхронной скоростью (частотой), т.к. ротор при этой скорости вращается синхронно с полем. Синхронный режим работы асинхронного двигателя называется идеальным холостым ходом. Он возможен только в том случае, если ротор приводится во вращение другим двигателем или механизмом, присоединённым к валу.
), отнесённой к скорости вращения поля. При известной частоте сети и числе пар полюсов по скольжению можно определить скорость вращения. Например, скорость вращения двигателя с двумя парами полюсов при питании от промышленной сети (n = 60*50/2 = 1500 об/мин) и скольжении 0,05 составляет 1425 об/мин. Скольжение при неподвижном роторе (n = 0) равно единице, а при синхронном вращении (n =n1) — нулю. Скорость или частота вращения магнитного поля называется также синхронной скоростью (частотой), т.к. ротор при этой скорости вращается синхронно с полем. Синхронный режим работы асинхронного двигателя называется идеальным холостым ходом. Он возможен только в том случае, если ротор приводится во вращение другим двигателем или механизмом, присоединённым к валу.
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил
 где См — конструктивная постоянная; j2s- фазовый сдвиг между током и магнитным потоком. Отношение максимального момента Мmax к номинальному Мн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
где См — конструктивная постоянная; j2s- фазовый сдвиг между током и магнитным потоком. Отношение максимального момента Мmax к номинальному Мн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
 Потери в асинхронном двигателе
Потери в асинхронном двигателе
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95.
Рабочий момент двигателя пропорционален квадрату напряжения, что необходимо учитывать при включении двигателя в протяженных распределительных сетях. Номинальному моменту соответствует номинальное скольжение, а пусковому — sп.
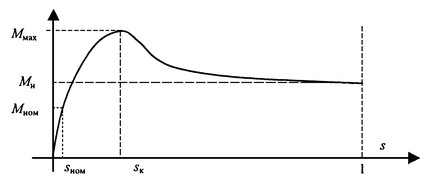 Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке. На участке от 0 до Мmax двигатель работает в устойчивом режиме, а участок от Skназывается режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке. На участке от 0 до Мmax двигатель работает в устойчивом режиме, а участок от Skназывается режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Определение Опрокидывание — Энциклопедия по машиностроению XXL
Определенные интегралы — см Интегралы определенные Опрокидывание — Устойчивость 369 Ординаты 238, 249 [c.557]Можно поставить задачу об отыскании такой зависимости р = / (р), при которой не будет иметь место эффект опрокидывания волны сжатия Римана. Так будет, например, если скорость с получает-е. с/йр = 0. В этом с.лучае на основании (18.8), (18.10) и (18.12) для определения вида зависимости р от р будем иметь следующее простое дифференциальное уравнение
Для определения характера движения ротора двигателя после опрокидывания (возврат под действием упругой реакции трансмиссии) достаточно решить уравнение [c.392]
На рис. 1. 3 показана характеристика асинхронного двигателя. При работе двигателя на верхней устойчивой ветви характеристики от 5 = о до 5 = и при изменении момента сопротивления от нуля до М, ах вне зависимости от продолжительности действия каждого значения указанного момента двигатель будет сохранять способность автоматически развивать движущий момент в соответствии с моментом сопротивления. Когда же момент сопротивления Мд достигнет значения Мо, т. е. превысит Мтах, то двигатель опрокинется и рабочая точка характеристики, перейдя на неустойчивую ветвь, может дойти до положения с1, соответствующего нулевой угловой скорости. Однако, если увеличенное значение момента сопротивления Мо будет действовать кратковременно, то остановки двигателя не произойдет, так как процесс опрокидывания двигателя, связанный с изменением скорости движущихся масс, требует определенного времени. [c.419]
Ранее ставилась задача определения безопасной продолжительности повышенной нагрузки двигателя, при которой не происходит опрокидывания последнего. Однако для машин-орудий некоторых типов больший интерес представляет задача определения угла поворота ротора за время действия указанной повышенной нагрузки. В этом случае можно поставить задачу об определении необходимого махового момента всей движущейся системы, при котором не произойдет опрокидывания двигателя даже при весьма больших силах сопротивления, но действующих на протяжении ограниченного угла поворота ротора. [c.422]
Во всех случаях расчёта устойчивости кранов учитываются наиболее неблагоприятные условия работы. Так, при определении грузовой устойчивости (опрокидывания в сторону груза) принимают наибольший вес груза на максимальном вылете, уклон мощности и давление ветра в сторону груза. [c.788]
Механизм опрокидывания рассчитывается по максимальному суммарному статическому моменту. По величине этого же момента производится предварительное определение мощности электродвигателя для привода механизма опрокидывания (окончательная проверка электродвигателя производится согласно указаниям раздела Силовое оборудование подъёмно-транспортных машин» настоящей главы). [c.994]
Простейший вариант комплексных испытаний применим к машинам, предназначенным для выполнения небольшой номенклатуры тяжелых работ, и заключается в использовании машины в наиболее трудных условиях. Так, бульдозер можно испытывать при передвижке грунтов с большим сопротивлением сдвигу или скальных пород автомобиль-самосвал можно испытывать в карьерах с экскаваторной загрузкой и последующей транспортировкой груза по тяжелым дорогам, причем заданное число циклов загрузки и опрокидывания, а также величина пробега по определенной дороге при круглосуточных испытаниях обычно могут быть достигнуты в приемлемые сроки. [c.137]
А. Экспериментально-теоретическое определение параметров и коэффициентов уравнения движения механизма опрокидывания бункера [c.154]
После экспериментального определения центра тяжести и момента инерции самого бункера переходим к определению центра тяжести и момента инерции бункера с учетом переменности массы в процессе опрокидывания. [c.157]
Широкое применение двухфазных сред в современной технике в химической технологии, в криогенной технике, в газо- и нефтедобыче, в трубопроводном транспорте, в металлургии, в ракетной технике и энергетике (в том числе ядерной) — поставило задачу создания газодинамики таких сред. В газодинамике одним из определяющих понятий является понятие о скорости распространения малых возмущений. На знании скорости звука базируется определение важнейшего критерия газодинамического подобия числа Маха. Поскольку газожидкостная среда характеризуется весьма малой скоростью звука, сопоставимой со скоростями движения газожидкостных потоков в каналах различной геометрии, то значения скорости звука в изучении этих потоков возрастают по сравнению с однофазными потоками. Нередко движение газожидкостных потоков сопровождается нестационарными явлениями, характеризующимися возникновением пульсаций давления, плотности, скорости, температур обеих фаз. Чаще всего эти явления, связанные, например, с возникновением гидравлических ударов, с вибрациями трубопроводов и другого оборудования, нарушением режима циркуляции (опрокидывание циркуляции) и теплообмена, недопустимы или нежелательны. В других случая , возникновение двухфазных течений интенсифицирует теплообмен, повышает эффективность работы некоторых элементов энергетического оборудования и их экономичность. [c.31]
Нельзя, разумеется, не учитывать определенной условности приведенных подсчетов, поскольку фактическая площадь прилегания может быть значительно меньше принятого (80%) значения. Кроме того, этот подсчет не учитывает, естественно, особенностей условий работы отдельных соединений, таких, например, как наличие постоянной, надежной смазки баббита и фактически отсутствие таковой у опорных подкладок вкладышей или между корпусом подшипника и рамой, возможности опрокидывания стула и связанного с этим явлением временного местного увеличения контактных напряжений на скользящих поверхностях и др. [c.122]
Если устранить все возмущения, возникающие в воздухе опытного участка, то можно наблюдать на определенном месте поверхности пластины возникновение в интерференционных линиях регулярных синусоидальных волн, перемещающихся с определенной скоростью в направлении потока. Картина таких волн воспроизведена на рис. 4. Наблюдения далее показывают, что вначале возникают плоские волны, а далее по мере их движения вдоль плиты амплитуды волн непрерывно увеличиваются. Одновременно начинается подъем фронта волны по периферии. Это видно на рис. 4 и особенно на рис. 5. Наконец, аналогично волнам на поверхности воды гребень волны опрокидывается, однако с той разницей, что подъем и опрокидывание происходят против направления распространения волны. Этот завиток волны ясно виден в нижней части рис, 5 и, очевидно, обусловлен видом скоростного профиля (см. рис. 1). Часто волна, как это видно из рис. 6, деформируется нерегулярным образом, причем волна остается нерегулярной на всем протяжении, что приводит в конце концов к совершенно беспорядочному изменению интерференционных линий (рис. 7). При движении волны вдоль потока на матовом стекле интерферометра можно наблюдать наряду с перво- [c.352]
При малых возмущениях потока, безразлично, вносятся ли они из окружающего воздуха или от поверхности пластины,,переходный процесс возникает из-за того, что пограничный слой вследствие поперечных колебаний определенной длины волны становится при определенных условиях неустойчивым. При распространении волны нарастают и усиливаются. При этом волны искажаются, поскольку неустойчивость теперь имеет место в области постоянного нарастания длин волн. Последнее приводит к возникновению новых волн, число которых непрерывно возрастает до тех пор, пока, наконец, не произойдет их деформация и опрокидывание. Одновременно начинается переход двухмерного потока, который до этого имел место, к трехмерной нерегулярной форме течения. Вначале это довольно грубая форма турбулентности, затем по мере развития потока большие вихри разрушаются и из них образуются мелкие вихри ( мелкозернистая форма турбулентности). [c.357]
Эти координаты необходимы для расчета блока цилиндров на опрокидывание относительно распределителя и для определения усилия, действующего на регулирующий орган (люльку) насоса. [c.75]Определение числового значения коэффициента грузовой устойчивости должно производиться при направлении стрелы, перпендикулярно ребру опрокидывания, а также под углом 45° с учетом дополнительных касательных инерционных сил, возникающих при торможении механизма поворота, по формуле, приведенной в приложении 2. [c.510]
Задачами расчета естественной циркуляции являются определение скоростей воды и полезных напоров в контурах, а также запасов надежности по застою и опрокидыванию циркуляции, условий движения в опускных трубах и т. д. [c.492]
Ветровую нагрузку рабочего состояния учитывают при расчете металлоконструкций на прочность и выносливость, при проверке грузовой устойчивости крана против опрокидывания, а также при расчете механизмов крана. Ввиду непостоянства и нерегулярности ветрового воздействия при определении мощности двигателей крановых механизмов учитывают не более 60% от полной ветровой нагрузки рабочего состояния. Ветровую нагрузку нерабочего состояния учитывают при расчете на прочность металлоконструкций, механизмов передвижения крана и их противоугонных устройств, а также при расчете собственной устойчивости крана против опрокидывания. [c.186]
Положение ковша в пространстве определяется сочетанием следующих движений его поворота относительно стрелы, выдвижения (втягивания) подвижной секции стрелы, поворота неподвижной секции стрелы относительно собственной продольной оси, поворота рамы в вертикальной плоскости и поворота платформы экскаватора. Основное движение при планировке земляных поверхностей — втягивание подвижной секции стрелы при установленном в рабочее положение (с определенным углом резания) ковшом. Поворот неподвижной секции стрелы и вертикальные перемещения рамы являются корректирующими. По достижении ковшом крайнего положения (в случае планировки откосов — его бермы), во избежание просыпания грунта при его транспортировании в ковше, последний подворачивают к стреле, гидроцилиндром 6 (см. рис. 7.16) поднимают рабочее оборудование и поворачивают платформу с одновременными маневровыми движениями подвижной секции стрелы с таким расчетом, чтобы к концу поворотного движения ковш оказался в положении разгрузки, которую выполняют опрокидыванием ковша. Возвращают ковш на исходную позицию следующего рабочего цикла теми же движениями в обратном порядке. [c.222]
Удерживающий момент Му = О Ь] , где — нормативный вес крана, определенный по конструкторской документации 5 -расстояние от центра тяжести крана до вертикальной плоскости, проходящей через ребро опрокидывания, определенное с учетом расчетного наклона основания крана в сторону опрокидывания. [c.477]
Для исследования устойчивости стержней в условиях, моделирующих опрокидывание автомобиля, на рис. 3.23 рассмотрен пример схематичного представления сечения центральной стойки боковины. Определение положения нейтральной оси и момента инерции [c.89]
Эффект от действия той или иной внешней нагрузки (силы) зависит не только от ее значения, но и от точки ее приложения. Чем дальше действующая сила от ребра опрокидывания, тем больше эффект ее действия. Другими словами, действие нагрузок на кран характеризуется моментом действующей силы, равной произведению этой силы на расстояние от ребра опрокидывания (плечо действия). В свою очередь плечи действующих сил зависят от угла наклона площадки, на которой стоит кран, положения стрелы и груза. Краны проектируют так, чтобы при любых условиях (как в рабочем, так и нерабочем состоянии) была обеспечена их устойчивость. При определении устойчивости ветровая нагрузка и уклон пути в расчетах рассматриваются как факторы, всегда неблагоприятные для устойчивости крана. [c.13]
Размерные и весовые параметры определяют, как правило, одновременно. При этом если такие показатели, как размеры, база, колея, дорожный просвет, погрузочная высота, общая масса, распределение ее по осям автомобиля измеряют или взвешивают, то расположение центра тяжести, распределение нагрузок по осям, колесам и каткам рассчитывают по результатам взвешивания автомобиля в различных положениях или определения угла бокового опрокидывания. [c.285]
Номограмма для определения удельного полезного напора при опрокидывании циркуляции приводится на рис. 2.13. Аропр определяется здесь в зависимости от давления и полного коэффициента сопротивлений 2, отнесенного к 1 м длины трубы (отношение Zjh). На номограмме отмечены также наибольшие значения удельного напора опрокидывания Армр. макс =g(p —p») для каждого давления (см. пунктирные вертикальные линии в левой части номограммы). [c.63]
Определение динамических усилий при резком торможении двухприводных машин оказывается более сложным, чем исследование их запуска. Усложнение вызывается прежде всего нелинейностью механических характеристик турбомуфт, имеющей в данном случае существенное значение, так как при опрокидывании рабочая точка переходит с устойчивого участка характеристики на неустойчивый. Кроме того, при торможении, как правило, неизбежно смещение во времени процессов опрокидывания муфт приводов. В связи с этим интегрирование системы дифференциальных уравнений движения машины при резком возрастании сил сопротивления удается осуществить лишь при помощи электронных моделирующих машин. Методика программирования такого исследования приведена в 46. [c.394]
Выберем в качестве системы координат начальные позиции. В этой системе для разных y будут построены подобные объемы, вложенные один в другой. Дискретность изменения параметров была принята равной Исследования начались с того, что специальная программа, приведенная в приложении, проверила все симметричные походки восьминогих и запасы их устойчивости и записала на магнитную ленту в один четырехмерный массив. Значения индексов любого элемента этого массива были равны значениям начальных позиций рассматриваемой походки и величине 7- Числовое значение элемента массива было равно записанному но определенному правилу запасу статической устойчивости данной походки. Правило записи в ячейку заключалось в том, что запас от опрокидывания назад умножался целочисленно на 1000 и складывался с запасом от опрокидывания вперед. Неустойчивым походкам приписывался знак минус. Размерность массива — В [1 10, 1 16, 1 1G, 1 16]. [c.33]
Производительность торцевых вагоноопро-кидывателей в среднем равна 8—10 вагонам в час грузоподъёмность вагонов 15—20 т. Определение величины моментов опрокидывания при расчёте торцевых вагоноопро- [c.984]
Определение момента опрокидывания груза при расчёте боковых вагоноопрокиды-, вателей, так же как и при ранее рассмотрен- [c.988]
Определение моментов опрокидывания от груза при расчёте круговых вагоноопро- [c.993]
Кроме того, одной из основных причин нарушения нормальной эксплуатации испарительных контуров с выносными циклонами является значительное отклонение расхождения уровня воды в циклоне и барабане от намеченных расчетом. В связи с этим вопрос о контроле за соответствием действительного расхождения уровня воды проектному имеет огромное практическое значение, а поэтому пуск и наладка любого котла, снабженного экранным контуром с выносными циклонами, должны обязательно сопровождаться необходимой проверкой и контролем за понижением или повышением уровня воды в циклоне при различных нагрузках котла, в том числе и максимальной. Посадка уровня воды в циклоне относительно оси барабана при работе котла с различными нагрузками зависит, как известно, от выбора схемы, размера соединительных трубопроводов по пару и воде между циклоном, сборным коллектором, уравнительными емкостями или барабаном. Для каждого испарительного контура, включенного на выносной циклон, все коэффициенты запаса по застою и опрокидыванию обеспечиваются при определенном, принятом в проекте, положении уровня воды в циклоне. Значительное опускание уровня воды ниже расчетного может приводить к нарушению надежности работы и вызывать неустойчивость циркуляции в отдельных слабообогреваемых трубах этого контура, особенно при небольшой его высоте. Значительные отклонения в опускании уровня воды в циклоне от проектного могут приводить, как уже отмечалось выше, [c.85]
Свободно стоящие стреловые краны, не закрепленные на фундаменте или стене здания, подвержены действию внешних нагрузок в процессе выполнения грузоподъемных операций, а также в нерабочем состоянии, определенное сочетание которых вместе с силами тяжести составных частей кранов может привести к их опрокидыванию. Способность кранов противостоять опрокидыванию относительно некоторой общей с основанием оси (ребра опрокидывания) называют устойчивостью. Условием устойчивости является равенство моментов относительно возможного ребра опрокидывания опрокидывающих Мдпр кран и удерживающих Му его сил или превышение второго над первым Му > М р. Различают продольную при возможном опрокидывании в продольной плоскости ходового оборудования и поперечную устойчивость — в поперечной плоскости. В качестве ребра опрокидывания при проверке продольной устойчивости при- [c.188]
В заключение следует еще обратить внимание на то, что выводы, относящиеся к устойчивости плоасой формы изгиба, действительны лишь пока напряжения не превосходят предела упругости. Если бы, например, значение критического напряжения Ощах получилось при определении по указанному здесь способу болыпе предела упругости материала, то опрокидывание (потеря устойчивости) произошло бы раньше, чем этого следовало ожидать на основании расчета. [c.354]
Доля запаса % учитывает минимальный запас прочности и выбирается в зависимости от ответственности рассчитыв мого элемента (механизма) с учетом соображений о степени точности расчета (определение нагрузок и напряжений). Части краиа, повреждения которых могут вызвать падение груза, стрелы, опрокидывание поворотной части, крана и угон его ветром вдоль пути, резкие удары при наезде на упоры и соседние краны, должны рассчитываться с повышенным запасом прочности. Они должны иметь большее значение 1, чем части крана, поломки которых вызовут только его остановку также значения % следует увеличивать для кранов, транспортирующих жидкий металл. В условиях, когда на кране отсутствуют люди, а также в случае особых нагрузок величина может быть уменьшена. [c.93]
Большую известность получила вторая теория Делягира , служившая для определения необходимых размеров колонн, поддерживающих арку. Предполагая, что разрушение арки происходит по сечениям, находящимся на /4 части длины арки от ее концов (рис. 17), он определил силы, действующие со стороны средней части арки на крайние (трение по линии шва не учитывалось), а также момент каждой из этих сил относительно внешней точки опоры колонны, поддерживающей арку. Этот момент стремится опрокинуть колонну. Вес колонны создает момент, противодействующий опрокидыванию. Из равенства указанных моментов определяются необходимые размеры колонн. Теория Делягира в несколько упрощенном виде была изложена в Инженерной науке Белидора, на ее основе Перроне и Шези составили таблицы для расчета арок . [c.172]
Опрокидывания циркуляции не произойдет, если 5полопрокидывании циркуляции, определенное при минимальной скорости пароводяной смеси в слабо обогреваемой трубе, Па, [c.235]
На рис. 87 Приводится также графическая зависимость угла поворота сечения оси опрокидывания Рш от начального уклона площадки з- Там же показаны результаты экспериментальных замеров, полученные на специальном стенде для определения боковой устойчивости (рис. 88). Самосвал ЗИЛ-ММЗ-4505 загружали с равномерно распределенной нагрузкой 60 кН, центр тяжести находился в геометрическом центре платформы. Груз закрепляли на платформе. Задние колеса устанавливали на площадку стенда, которую при помощи гидроцилиндров поворачивали на фиксированный угол относительно продольной оси, расположенной на внешней стороне колес одного из бортов (на рис. 88 —правого), после чего кузов поднимали на максимальную высоту и фиксировали угол поворота сечения рамы, соответствуюшего оси опрокидывания. [c.150]
Все детали, которые сопря гаются с направляющими (ползуны, каретки, столы), должны свободно передвигаться по ним, в то же время должна быть полностью исключена возможность опрокидывания этих деталей и их отрыва от направляющих этого добиваются применением различных планок и клиньев. Зазоры в сопряжениях точных узлов (например, суппортов, ползунов) должны быть такими, чтобы при их проверке щуп 0,03 мм не мог закусывать . Детали, сопрягающиеся с вертикальными направляющими, например ползуны прессов, различные шпиндельные бабки, расположенные на колоннах, консоли фрезерных станков и др., должны перемешаться вниз под действием собственного веса. В то же время в сопряжении должна сохраняться определенная плотность. [c.306]
🎓 опрокидывание электродвигателя ⚗ from english to russian 🧬
1 breakdown
1) разрушение; обрушение
3) дробление; измельчение
6) нефт. (гидравлический) разрыв пласта11) возникновение разряда, зажигание
14) метал. раскат
15) мн. ч. черновые листовые заготовки
•
Англо-русский словарь технических терминов > breakdown
2 stalling
потеря скорости; остановка ; заклинивание ; срыв потока
* * ** * *
Англо-русский словарь нефтегазовой промышленности > stalling
3 breakdown
[‘breɪkdaʊn] 1) Общая лексика: аварийный, авария, анализ, деление на категории, детальная разработка сценария, классификация, крушение, машины, нарушение, нарушение движения , неисправность, отказ, падение, полный упадок здоровья, полный упадок сил, поломка, поломка машины, поломка механизма, прекращение, прекращение функционирования, пробой , провал, продавливание, разборка , развал, разруха, разрушение, разрыв, распад, распределение, расстройство, расчленение, ремонтный, срыв, стремительный негритянский танец, структура, схема организации, упадок, упадок сил, отрыв , отпирание , статистика, расклад, прокол, сбой, срыв, неуспех, неудача, «пролёт», «облом» 6) Техника: выход из строя, демонтаж, дробление, излом, измельчение, количественное распределение, неполадка, обминка , обрушение, опрокидывание , пластифицирование, повреждение, порча, развальцовка, разложение на компоненты, раскладка, расслоение , снос, нарушение 12) Бухгалтерия: разбивка , экономический крах, экономический кризис31) SAP. подразделение данных
41) Кабельные производство: авария, разрушение, деструкция, отказ , пробой 44) Макаров: группировка, изнеможение, исчезновение, падение скорости, поломка механизма, машины, расчленение на мелкие группы, резкое уменьшение, резкое ухудшение, торможение, электрический пробой, разложение , классификация , пластифицирование , обрушение , разложение , авария , упадок сил , срыв , количественное распределение , авария , разложение , брейк , разъединение , пробой , пробивание46) SAP.фин. развёртка
Универсальный англо-русский словарь > breakdown
4 stalling
[‘stɔːlɪŋ] 13) Глоссарий компании Сахалин Энерджи: остановУниверсальный англо-русский словарь > stalling
5 опрокидывание
commutation failure, breakdown, changeover, dumping, overthrow, overturn, tilting motion, tilting, tipping, upsetАнгло-русский словарь технических терминов > опрокидывание
6 автоматический пускатель электродвигателя
Большой англо-русский и русско-английский словарь > автоматический пускатель электродвигателя
7 вал электродвигателя
Большой англо-русский и русско-английский словарь > вал электродвигателя
8 изоляция электродвигателя кат
Большой англо-русский и русско-английский словарь > изоляция электродвигателя кат
9 испытание на опрокидывание
Большой англо-русский и русско-английский словарь > испытание на опрокидывание
10 опрокидывание
Большой англо-русский и русско-английский словарь > опрокидывание
11 опрокидывание айсбергов
Большой англо-русский и русско-английский словарь > опрокидывание айсбергов
12 опрокидывание волн
Большой англо-русский и русско-английский словарь > опрокидывание волн
13 опрокидывание вышки
Большой англо-русский и русско-английский словарь > опрокидывание вышки
14 опрокидывание мачтовой вышки
Большой англо-русский и русско-английский словарь > опрокидывание мачтовой вышки
15 опрокидывание пласта
Большой англо-русский и русско-английский словарь > опрокидывание пласта
16 опрокидывание пластов
Большой англо-русский и русско-английский словарь > опрокидывание пластов
17 опрокидывание потока
Большой англо-русский и русско-английский словарь > опрокидывание потока
18 опрокидывание фазы
Большой англо-русский и русско-английский словарь > опрокидывание фазы
19 пускатель высоковольтного электродвигателя
Большой англо-русский и русско-английский словарь > пускатель высоковольтного электродвигателя
20 пускатель электродвигателя
Большой англо-русский и русско-английский словарь > пускатель электродвигателя
Look at other dictionaries:
1. Переходные процессы в системах электроснабжения (узлах нагрузки) электрич. Систем при малых возмущениях л.14.
9
УСТОЙЧИВОСТЬ ЭЛЕКТРИЧЕСКИХ СИСТЕМ.
Деление режимов электрической цепи на установившиеся и переходные процессы условно. В установившемся режиме реальной системы её параметры постоянно меняются, что связано со следующими факторами Л.5, с.169:
изменение нагрузки и реакцией на эти изменения регулирующих устройств;
нормальными эксплуатационными изменениями схемы коммутации системы;
включением и отключением отдельных генераторов или изменением их мощности.
Таким образом., в установившихся режимах в системе всегда возможны малые возмущения параметров её режима, при которых система должна оставаться устойчивой.
Статическая устойчивость – это способность системы восстанавливать исходный (или близкий к исходному) режим после малого его возмущения.
Динамическая устойчивость – это способность системы возвращаться в исходное (или близкое к нему) состояние после большого возмущения (аварийные режимы в электрической системе – КЗ, аварийные отключения или включения нагруженных агрегатов или линий, генераторов, транс-ров и т.п.), при этом возникают резкие изменения режима.
Исходя из определения статической устойчивости системы следует, что существует такой режим, при котором очень малое возмущение вызывает нарушение его устойчивости. Такой режим называется предельным, а нагрузки системы – максимальными или предельными нагрузками по условиям статической устойчивости.
Считается, что качество переходного процесса хорошее, если наблюдается быстрое его затухание и монотонность. Наибольшая величина отклонения параметра, при которой система ещё сохраняет устойчивость, определяет запас устойчивости, выражаемый коэффициентом запаса. Например, запас по напряжению и по мощности вычисляются по формулам:
 ,
,  .
.
Запас устойчивости электропередачи, связывающей станцию с шинами энергосистемы, должен быть не менее 20% в нормальном режиме и 8% в кратковременном послеаварийном Л.5, с. 177.
Задачи анализа статической устойчивости.
1. Расчёт параметров предельных режимов (предельной передаваемой мощности по линиям, критического напряжения узловых точек системы, питающих нагрузку, и т.д.).
2. Определение значений коэффициентов запаса. Вместе с коэффициентами запаса по напряжению и мощности могут вычисляться коэффициенты запаса по настроечным параметрам АРВ:
 ,
,
где Кmax и Кmin – максимальное и минимальное значения настроечных параметров, соответствующих границе области статической устойчивости.
3. Выбор мероприятий по повышению статической устойчивости энергосистем или обеспечению заданной пропускной способности передачи.
4. Разработка требований, направленных на улучшение устойчивости систем. Выбирается настройка АРВ, обеспечивающая требуемую точность поддержания напряжения.
Задачи анализа динамической устойчивости.
Эти задачи связаны с переходом системы от одного установившегося режима к другому.
Результатами расчёта динамической устойчивости являются:
1. Предельное время отключения расчётного вида КЗ в наиболее опасных точках системы.
2. Паузы систем АПВ, установленных на различных элементах электрич. системы.
3. Параметры систем автоматического ввода резерва (АВР).
Часть электроэнергетической системы, непосредственно осуществляющая снабжение электрической энергией потребителей, называется системой электроснабжения. Система электроснабжения содержит питающие и распределительные сети, трансформаторы, компенсирующие устройства (конденсаторы, синхронные компенсаторы) и устройства, в которых электрическая энергия используется в производственных и бытовых целях (приёмники электрической энергии, нагрузки, потребители). Места подключения отдельных систем электроснабжения к высоковольтным сетям электрических систем называют узлами нагрузок (шины, к которым подключена группа сосредоточенных приёмников и компенсирующих устройств — АД и СД, нагревательные приборы и т. д.).
В системах электроснабжения при их нормальной работе и во время различных пусков и остановок оборудования происходят нормальные переходные процессы. Отключения отдельных элементов, КЗ в них приводят к аварийным переходным процессам.
В нормальных режимах, при малых возмущениях необходима проверка статической устойчивости синхронных двигателей (СД), синхронных компенсаторов (СК) и больших групп асинхронных двигателей (АД). Имея мощность, соизмеримую с мощностью питающих их генераторов эти потребители могут оказаться неустойчивыми, причём эта неустойчивость проявляется в виде специфического явления, называемого лавиной напряжения.
Пуски двигателей, резкие колебания момента на их валу и т.д., приводят к изменениям величины и фазы напряжения в узлах нагрузки. Эти отклонения не должны выходить за допустимые пределы. Влияние резких изменений режима двигателей обычно заметно проявляется в распределительных сетях в виде колебаний напряжения.
Нарушения режима (КЗ в элементах питательных сетей, отключения и повторные включения СД, сомозапуск АД после перерывов питания) могут весьма существенно сказываться на режиме всей системы электроснабжения. Поэтому переходные процессы в её элементах рассматриваются не только с точки зрения обеспечения их надёжности и устойчивости, но и с точки зрения обеспечения надёжности всей системы электроснабжения.
Таким образом, изучение вопросов, относящихся к переходным процессам в системах электроснабжения, выполняется в два этапа: в начале рассматриваются методы расчётов коротких замыканий, а затем рассматриваются вопросы устойчивости, физика электромеханических процессов и основы расчёта этих процессов.
Если принять напряжение U на шинах (напряжение узла нагрузки) не зависящим от режима работы электроприёмников, то проверка статической и динамической устойчивости производится независимо для каждого электроприёмника с учётом основных критериев статической устойчивости.
Практический критерий устойчивости: устойчивыми будут те режимы, в которых при возмущении факторы, стремящиеся нарушить режим, изменяются менее интенсивно, чем факторы, противодействующие этому нарушению.
Характеристики асинхронной нагрузки (АД).
Активная мощность АД и электромагнитный вращающий момент АД:
 ;
;  ;
; .Здесь:
.Здесь: ,
, .
.
В нормальных условиях двигатель работает на устойчивой части своей механической характеристики (область, лежащая между синхронной скоростью и критическим скольжением). При снижении напряжения или увеличении механического момента двигатель может оказаться в критическом режиме. При данной механической нагрузке Рмех у каждого двигателя есть определённый критический режим. Напряжение Uкр и скольжение sкр , при которых этот режим наступает, называется критическим. При U < Uкр и увеличении механического момента рабочей машины двигатель окажется в критическом режиме – двигатель начнёт тормозиться, ток и реактивная мощность резко возрастут, а затем АД остановится – “опрокинется”.
Обычно АД работают
со значительным запасом устойчивости
(запас устойчивости – отношение  ).
Рабочее скольжение значительно меньше
критического, максимальный вращающий
момент много больше рабочего. В этих
условиях колебания напряжения не опасны
с точки зрения устойчивости двигателей,
и только очень большие снижения напряжения
на их шинах (порядка 20 – 40%) приводят к
опрокидыванию.
).
Рабочее скольжение значительно меньше
критического, максимальный вращающий
момент много больше рабочего. В этих
условиях колебания напряжения не опасны
с точки зрения устойчивости двигателей,
и только очень большие снижения напряжения
на их шинах (порядка 20 – 40%) приводят к
опрокидыванию.
Характеристики синхронной нагрузки (CД).
При изменении напряжения, подведённого к двигателю, его мощность и вращающий момент изменяются (без учёта потерь в статоре) пропорционально величине напряжения:
 ;
;  .
.
Величина момента, если не учитывать насыщение, пропорциональна току ротора. Синхронный двигатель обычно работает при угле = 25 30 и обладает значительной перегрузочной способностью Кп = Mmax/Mном = 2 2,5 (у специальных машин Кп = 3 4).
Для СГ запас статической устойчивости определится:
Запас устойчивости электропередачи, связывающей станцию с шинами энергосистемы, д. б. не менее 20% в нормальном режиме и 8% в кратковременном послеаварийном.
СД как и АД имеют большие запасы устойчивости и поэтому обеспечение статической устойчивости отдельных двигателей, входящих в нагрузку, не вызывает затруднений. Если запас устойчивости характеризовать отношением максимального вращающего момента к рабочему, то коэффициент запаса составит для АД и СД соответственно 1,5 –1,7 или 2 –2,5.
Таким образом, небольшие снижения напряжения на шинах двигателей не могут привести к нарушению их устойчивости. Однако всё сказанное относится к единичному двигателю или группе двигателей, питаемых от шин напряжения, величина которого не зависит от режима двигателя.
Если двигатель (или группа двигателей) питается от генератора соизмеримой с ним мощности, то напряжение на шинах двигателя зависит от режима двигателя. Условия нарушения устойчивости (опрокидывания) двигателя получаются в этом случае существенно иными. В этом случае качественные изменения условий устойчивости обусловлены изменением количества двигателей, подключенных к узлу нагрузки.
Критическое скольжение двигателя оказывается много меньше, чем в случае подключенного к шинам неизменного напряжения (U = Сonst). Запас устойчивости двигателя с учётом внешнего сопротивления значительно снижается. При больших внешних сопротивлениях возможны такие режимы, когда небольшое понижение напряжения на шинах (в допустимых пределах) может привести к нарушению статической устойчивости двигателя.
Условия работы двигателей в системе будут существенно иные, чем те, что были бы при питании от шин неизменного напряжения (U=Const).
Опрокидывание двигателя (или группы двигателей), питающихся от генератора соизмеримой мощности, может произойти при сравнительно небольших изменениях скольжения и небольших снижениях ЭДС, питающих эквивалентный двигатель, и тем более при небольших изменениях напряжения U (зависящего от режима двигателя).
Определение критических условий в этом случае следует проводить, исходя не из напряжения на зажимах двигателя, которое не является независимой переменной, а исходя из ЭДС генератора E, которую можно считать не зависящей от изменения режима.
Для двигателей, вблизи режима опрокидывания, процесс прогрессирующего снижения напряжения оказывается очень заметным. Персонал станции и системы не может судить непосредственно о росте токов роторов, статоров и скольжений двигателей, входящих в состав комплексной нагрузки в то время, когда они приближаются к опрокидыванию, но наблюдает резкое, лавинообразное снижение напряжения. Процесс этот получил название лавины напряжения. Появлению лавины напряжения обычно предшествуют режимы при недостаточно высоком возбуждении генераторов или при увеличении реактивных сопротивлений связи. Получающееся при этом снижение реактивной мощности, приходящей к потребителю, заставляет персонал систем считать причиной лавины напряжения так называемый “дефицит реактивной мощности” (генерируемая реактивная мощность в системе меньше той, которая соответствует желаемому уровню напряжения).
Обычно двигатели, подключенные к шинам напряжения, независящего от их режима, работают с весьма большим запасом устойчивости. Их рабочее скольжение значительно меньше критического, а максимальный вращающий момент много больше рабочего (1,5 1,7 Мн). Небольшие отклонения напряжения на шинах единичного двигателя не опасны с точки зрения устойчивости двигателя и только очень большие снижения напряжения на их шинах (порядка 20-30%) приводят к опрокидыванию. При питании группы двигателей от источника соизмеримой мощности в результате лавины напряжения может произойти опрокидывание и при малых (2-3%) отклонениях напряжения.
Компенсация реактивной мощности нагрузки батареями статических конденсаторов может иногда приводить к существенному снижению запасов устойчивости асинхронных двигателей, а при высокой степени компенсации – даже к “лавине напряжения”.
Длительные медленные снижения напряжения в распределительных и питающих сетях приводят к ряду явлений, с которыми приходится считаться при анализе переходных процессов в системах электроснабжения. Так понижение напряжения от U0 до U1 ведёт к снижению запаса статической устойчивости двигателей Л.3, с.199:
Коэффициент запаса по активной мощности определяется как
 .
.
Коэффициент запаса по напряжению в узле нагрузки определяется по формуле:
 ,
,
где U – напряжение узла нагрузки в исходном режиме; Uкр – критическое напряжение узла, значение которого принимается не менее 0,7 Uном и 0,75 Uнорм (Uнорм – напряжение в узле в нормальном режиме).
Приведение масс, движущихся поступательно, к валу двигателя
Приведение масс, движущихся поступательно, к валу двигателя производится также на основе сохранения запаса кинетической энергии (2-13) при переходе от поступательного движения к вращательному движению
 (2-13)
(2-13)
где: – кинетическая энергия поступательного
движения;
– кинетическая энергия поступательного
движения;
 –кинетическая
энергия вращательного движения;
–кинетическая
энергия вращательного движения;
 –скорость
поступательного
движения;
–скорость
поступательного
движения;
 –масса,
движущаяся поступательно;
–масса,
движущаяся поступательно;
 –угловая
скорость вала двигателя.
–угловая
скорость вала двигателя.

Из (2-13) получим момент инерции поступательного движения массы, приведенный к скорости вращения вала двигателя
 =
=  . (2-14)
. (2-14)
Если
в механизме имеются элементы с вращательным
и поступательным движением, то суммарный
момент инерции(2-12) –  ,
приведенный к скорости вращения вала
двигателя определяется как сумма (2-12)
и (2-14).
,
приведенный к скорости вращения вала
двигателя определяется как сумма (2-12)
и (2-14).
 (2-15)
(2-15)
моментов инерции вращающиеся частей приведенных к одной оси вращения и момента инерции поступательного движения массы, приведенного к скорости вращения вала двигателя.
Для
приведения момента инерции вращательного
движения к поступательному движению,
момент инерции заменяют на приведенную
массу поступательного
движения
поступательного
движения
 =
=  . (2-16)
. (2-16)
Заменив
в (2-16) отношение скоростей на ί =  – передаточное число получим (2-17)
– передаточное число получим (2-17)
 (2-17)
(2-17)
Таким
образом, многоэлементная электромеханическая
система, без зазоров и упругих звеньев
в передаче, посредством приведения заменена
одномассовым элементом,
имеющим момент инерции –  приведенный к скорости вращения вала
двигателя.
приведенный к скорости вращения вала
двигателя.
На одномассовый элемент, полученный посредством приведения, одновременно действует электромагнитнитный момент двигателя и статический момент (момент сопротивления механизма).
Тема лекции 3
Основы механики электропривода
ПЛАН ЛЕКЦИИ
1. Режимы работы электропривода, динамический момент.
2. Уравнение движения электропривода.
3. Время пуска двигателя в холостом режиме и под нагрузкой.
4. Время торможения и изменения скорости электропривода.
Режимы работы электропривода, динамический момент
Работа
электромеханической системы электропривод
– исполнительный механизм происходит
при взаимодействии различных сил и
моментов. Один из моментов создаётся
электродвигателем, он приводит систему
в движение и называется электромагнитным
моментом  ,
другие силы тормозят её
(систему)
и создают статический
момент сопротивления – М
,
другие силы тормозят её
(систему)
и создают статический
момент сопротивления – М .
За положительное направление статического
момента принимают направление,
противоположное моменту двигателя.
.
За положительное направление статического
момента принимают направление,
противоположное моменту двигателя.
Электропривод работает в двух режимах:
1. установившийся или статический режим,это режим при котором скорость привода не изменяется;
2. переходный или динамический режим, это режим при котором скорость изменяется.
Переходный режим может возникнуть в следующих случаях:
1. при изменении параметров двигателя, например, изменение сопротивления в цепи ротора; изменение числа пар полюсов статора и т.д.;
2. при изменении нагрузки механизма, например изменение подачи насоса, изменение величины сил трения якоря по грунтуи т.д.;
3. при изменении параметров судовой сети, например, при уменьшении величины напряжения или частоты тока во время включения электродвигателей большой мощности.
В переходном режиме электропривод переходит от одного установившегося режима к другому, при этом изменяются скорость, момент, и ток электродвигателя.
В установившемся режиме электромагнитный момент равен статическому моменту и противоположен ему по направлению,

и привод работает с постоянной скоростью

 .
(3-1)
.
(3-1)
В переходном режиме происходит ускорение или замедление привода и возникает инерционный или динамический момент, который двигатель должен преодолеть.
Во
время работы в переходном режиме, к
электромагнитному моменту двигателя  и статическому моменту
и статическому моменту добавляетсядинамический
момент
добавляетсядинамический
момент  ,
равный
,
равный
 ,
(3-2)
,
(3-2)
где: суммарный
момент инерции всех элементов привода,
приведенный к скорости вращения вала
двигателя
суммарный
момент инерции всех элементов привода,
приведенный к скорости вращения вала
двигателя
 –угловая
скорость;
–угловая
скорость;  –
угловое ускорение.
–
угловое ускорение.
Появление динамического момента объясняется действием сил инерции всех частей электропривода и исполнительного механизма.
Например, в электроприводе лебедки динамический момент появляется вследствие инерции якоря или ротора электродвигателя, шестерней редуктора, барабана лебёдки и т.д..
Динамический момент увеличивает время пуска и остановки электропривода, а так же время достижения установившейся скорости.
Для уменьшения динамического момента в двигателях специального исполнения уменьшают диаметр ротора и одновременно увеличивают длину ротора, с целью сохранения мощности двигателя. Такие двигатели применяют в электроприводах грузоподъемных механизмов. Их применение позволяет сократить время пуска и остановки электропривода, а значит, повысить производительность грузовых лебедок и кранов.
Серии таких электродвигателей называются крановыми (название произошло от грузового крана).
опрокидывание (двигателя) — это… Что такое опрокидывание (двигателя)?
- опрокидывание (двигателя)
опрокидывание (двигателя)
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
Справочник технического переводчика. – Интент. 2009-2013.
- опрокидывание
- продукты деления
Смотреть что такое «опрокидывание (двигателя)» в других словарях:
Снегоход — Стиль этой статьи неэнциклопедичен или нарушает нормы русского языка. Статью следует исправить согласно стилистическим правилам Википедии … Википедия
Hyundai Sonata — Эта статья о среднеразмерном автомобиле компании Hyundai. Об остальных значениях слова см. Sonata (значения). Hyundai Sonata Общие данные … Википедия
Судно — У этого термина существуют и другие значения, см. Судно (значения). Судно … Википедия
Chevrolet Tahoe — … Википедия
К-700 — К 700 … Википедия
К-700 (трактор) — К 700 Проект, г … Википедия
TGV — отправляется от станции Лион Перраш … Википедия
Mini-Z — 3 «суперкара» серии Racing: Lamborghini Murcielago (зелёная и чёрная) и Lamborghini Diablo в сравнении с передатчиком Mini Z это название популярной серии радиоуправляемых моделей автомобилей в масштабах от 1:24 до 1:30, выпускаемой… … Википедия
Скрепер — Военный скрепер армии США … Википедия
Buick Enclave — Buick Enclave … Википедия