


использование, особенности применения для соленоида и формулировка положений
Чтобы определить направленность напряжения в магнитном поле, используется правило буравчика. Способ показывает довольно точные результаты, если поле располагается прямолинейно относительно проводника, по которому пропущен электрический ток. Для определения характеристики силового поля с магнитным моментом дополнительно применяют правило левой и правой руки.
Общие правила
Существует несколько для вариантов, чтобы указать направление перпендикулярного отрезка к двум исходным векторам и определить ориентацию базиса. В физике есть такие важные направления:
- оборотов тела вокруг центра движения;
- силового вектора магнитного поля в выбранной точке.
Выбор пути аксиальной величины является условным, но он происходит одинаково, поэтому в конечном значении знак остается постоянным. Правила и способы помогают сохранять единый выбор:
- Правило буравчика.

- Правило правой руки. При помещении исследуемого кабеля в руку сжатые пальцы показывают путь линий силового поля, а большой — направление тока. При поступательном перемещении проводника вдоль линий, которые определяют напряженность, их движение направлено в ладонь. Вытянутый перпендикулярно большой палец совпадает с перемещением стержня. Если раскрыть кулак, то прямые пальцы определят курс индукционного тока.
- Правило левой руки. Рука располагается так, чтобы четыре пальца показывали направление движения электронов. Путь индукционных линий направлен в ладонь. Отогнутый палец показывает действие силы на провод. Закон действует для отклонения проводникового стержня, справа и слева от которого располагаются магниты, а он находится под током.


С помощью этих правил выбирается направление векторного произведения и базисов (или одного из двух взаимосвязанных понятий). Прием используется для определения направлений основных величин взамен применения остальных методов, если иметь представление о порядке расположения множителей в соответствующих формулах.
Способы выбора правила сочетаются между собой для вычисления положительного пути произведения векторов и базиса (координатной системы) в пространстве. Базис определяется как скоординированный векторный набор, при этом любой вектор в пространстве представляется в едином варианте линейного соотношения векторов из этого пакета.
Использование правила буравчика из физики приводит к главным выводам:
- движущийся стержень, стационарный магнит, заряженные электроны располагаются в электромагнитном силовом поле;
- на положительные и отрицательные частицы оказывается воздействие электромагнитного фона;
- перемещающийся проводник становится ориентиром для передвижения заряженных электронов, значит силовое поле действует на электрический шунт.

Можно применять специальные правила для определения направляющих характеристик стержня, который движется в электромагнитном поле. Этими формулировками пользуются в различных конкретных ситуациях, но они являются менее общими по значению.
Правая и левая системы координат
Для случаев, когда координаты не совпадают, нужно сделать:
- перенос луча так, чтобы его начальная точка находилась в начале координатного пространства, таким образом, абсцисса и ордината истока отрезка совпадают с координатами его окончания;
- вычитание из координатных показателей конца луча значение абсциссы и ординаты конца отрезка вместо перемещения начальной точки.

На плоскости прямоугольных координат расположение отрезка совпадает с ортогональной проекцией луча на координатную направляющую ось. Правило буравчика позволяет применять правый базис, но отход от негласного закона оговаривается отдельно. Эти правила условны, но сочетание векторов устанавливается так, что для базиса декартовой прямоугольной плоскости с одинаковым масштабированием по любым осям выполняются следующие законы:
- левые базисы вступают во взаимодействие, если применение правосторонних скоплений неудобно или не представляется возможным;
- зеркальное отображение правого сочетания базиса является копией левого набора векторов.
Правила согласовываются между собой для определения курса векторного произведения и законов построения (выбора) положительного набора векторных отрезков.
Для векторного произведения
Правило буравчика и правой руки для векторного результата гласит, что, если изобразить отрезки так, чтобы совпадали их истоки, и поворачивать первый вектор по наиболее краткому пути по отношению ко второму лучу, то винт будет вращаться в направлении произведения векторов.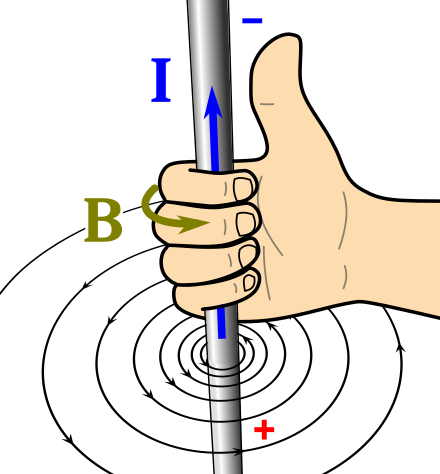
Для векторного произведения через стрелку на циферблате правило применяется, если изобразить отрезки так, чтобы их истоки совпадали. При этом второй луч вращается кратко по траектории ко второму вектору из набора. Направление векторного произведения будет идти к наблюдателю, если он стоит так, что обороты видит по часовому указателю. Буравчик закручивается вглубь часов.
Если при таком положении наблюдателя и однотипном вращении с предыдущим случаем ставятся пальцы кисти справа, как бы сжимая поворачивающийся стержень, то они указывают направление витков. Палец, который располагается под углом 90°, определяет курс векторного произведения.
Если векторы изображаются так, что их истоки находятся в одной точке, палец правой кисти ставится по первому вектору-множителю, а указательный — параллельно второму вектору, то средний приблизительно укажет курс векторного произведения для закона буравчика.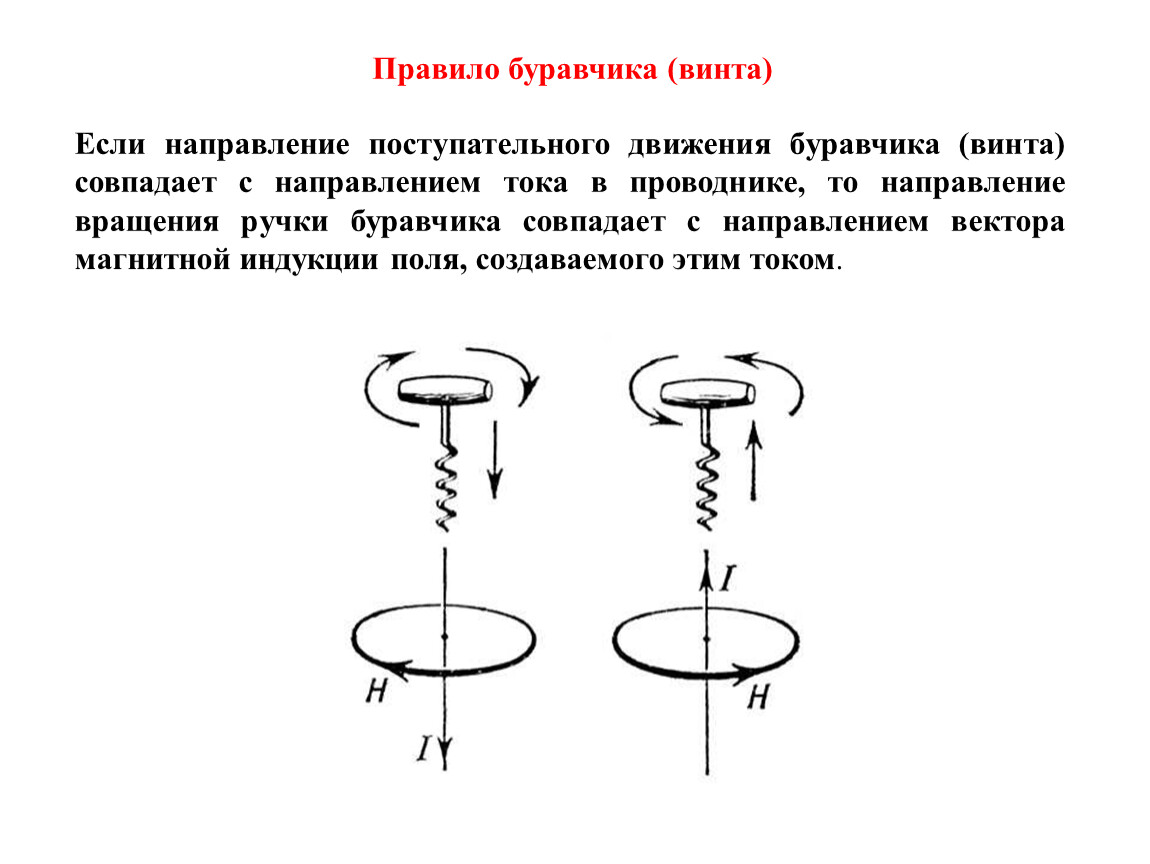 Физика в таком случае определяет направление:
Физика в таком случае определяет направление:
- луча электромагнитных линий;
- движения электронов, заряженных отрицательно и положительно;
- силы индукции.
Соотношение отрезков, абсцисс и ординат
Векторное соотношение двух отрезков, которые взаимодействуют в трехмерном пространстве, определяется лучом, расположенным перпендикулярно обоим начальным потокам. Длина произведения векторов равняется значению площади параллелограмма между начальными отрезками. Направление этих двух лучей выбирается так, чтобы три по порядку расположенных вектора из набора и результативных отрезков были правыми. Результат умножения векторов коллинеарного типа приравнивается к нулю, если один из них является отрезком с нулевым значением.
Для нахождения произведения пространственных векторов следует определить ориентацию участка, а именно разобраться в том, какие три отрезка относятся к правому и левому положению. При этом необязательна привязка к координатной системе. При выбранной ориентации пространственного участка результат произведения множительных векторов не зависит от левосторонней или правосторонней системы числовых направляющих.
При этом необязательна привязка к координатной системе. При выбранной ориентации пространственного участка результат произведения множительных векторов не зависит от левосторонней или правосторонней системы числовых направляющих.
Формулы отличаются по знаку для нахождения координат произведения лучевых векторов через ординаты и абсциссы начальных отрезков в левой и правой системе прямоугольной структуры. Результат сочетания векторов является антикоммутационным, так как в отличие от скалярного результата в итоге имеет также вектор.
Модуль произведения векторов также является результатом перемножения модулей отрезков, если величины располагаются перпендикулярно друг к другу. Значение модуля стремится к нулю в случае коллинеарности лучей. Произведение векторов определяется в физических и технических дополнениях. Например, импульсный момент и действие Лоренца заносятся в данные по форме результата перемножения элементов из векторного набора.

Для упорядоченного набора лучей
Все разнообразные применяемые правила винта или законы обеих рук в электротехнике и физике не являются обязательными к использованию, если направление характеристик электромагнитного поля можно определить основными правилами одновременно со знанием формул для подсчета векторного соотношения. Малораспространенные правила характерны для особых случаев, когда их использование является удобным для быстрого выявления элементарных показателей системы.
Правила для базиса переписаны в виде:
- Закон для базиса. Если в базисе присутствуют векторы, которые располагаются параллельно осям x, z, y, то большой палец направляется вдоль первого вектора по оси x. Указательный ставится параллельно второму отрезку по оси y, средний располагается вдоль третьего луча по оси z. После расстановки выявляется, что сочетание векторов относится к правостороннему расположению.
- Закон винта (буравчика) для базиса. Если поворачивать винт и векторы так, чтобы первый отрезок стремился ко второму по наименьшему пути, то буравчик направлением кручения покажет курс третьего вектора базиса (когда он правый).
 Если поворачивать винт и векторы так, чтобы первый отрезок стремился ко второму по наименьшему пути, то буравчик направлением кручения покажет курс третьего вектора базиса (когда он правый).
Если поворачивать винт и векторы так, чтобы первый отрезок стремился ко второму по наименьшему пути, то буравчик направлением кручения покажет курс третьего вектора базиса (когда он правый).Такие манипуляции расширяют возможности определения курса в координатном пространстве. Закон буравчика для базиса может заменить общее правило винта, правой кисти и других. Для его применения у наблюдателя должно быть развито некоторое пространственное воображение, так как требуется мысленно осуществлять поворот нарисованных векторов до того момента, пока они не совпадут с базисом. Набор векторов может при этом располагаться случайно.
Принцип для механического вращения
Отрезок вращения взаимно связывается с вектором угловой скорости поворота и лучом, начинающимся в неподвижной точке, приведенным в искомое положение. Величина определяется как произведение векторов. Угловая скорость представляет собой быстроту оборотов материального элемента вокруг центра.
Угловая скорость выражается:
- для поворотов в двухмерном участке пространства — числом;
- для трехмерного промежутка — псевдовектором, компоненты которого трансформируются при оборачивании координатной системы и меняют знак противоположно правилам поведения вектора при инверсии;
- в вариантах общего положения — кососимметрической величиной, меняющей знак при перемене индексации.
Для определения курса модуля отрезка применяются правило винта и правой кисти, эффективно используемые в случае нахождения векторного произведения. Иногда этого хватает, но при реальном вращении законы формулируются в запоминающемся и простом варианте для нахождения направлений:
- Закон буравчика. Если поворачивать винт в направлении вращения точки, то он завинчивается в сторону курса угловой скорости.
- Закон правой руки. Для этого тело берется правой рукой и поворачивается в направлении четырех пальцев, большой палец, который располагается под углом 90°, покажет путь угловой скорости при таком движении вокруг центра.
Для определения направления момента импульса, который меняется прямо пропорционально угловому вращению (скорости) с коэффициентом положительного импульса, применяются правила для нахождения показателей механического кручения.
Определение силового момента
Крутящий и вращательный момент представляет собой физический формат, равный произведению векторов силы и радиуса, проведенных от центральной оси к точке действия силы. Характеристики показывают силовое действие на твердом предмете.
Правила аналогичны предыдущим случаям, но отличаются незначительными деталями:
- Правило винта. Если поворачивать буравчик по курсу, куда сила вращает тело, то инструмент будет завинчиваться или вывинчиваться по путям направления силового момента.
- Правило правой кисти. Мысленно представляют, что тело в руке, тогда попытка его поворота в направлении вытянутых четырех пальцев (аналогично направляются поворотные усилия) при большом пальце на 90° покажет направление приложения вращательного момента.
Электродинамика и магнитостатика
Магнитная индукция представляет собой векторный фактор, который характеризует силовое поле. Величина показывает влияние магнитного фона на отрицательно и положительно заряженные частицы в исследуемом пространстве. Индукция определяет силу влияния поля на заряд, перемещающийся с заданной скоростью. Для этого случая законы применения описываются так:
- Правило винта. Если поступательное круговое движение буравчика совпадает с направлением заряженных электронов в катушке, то путь поворота ручки инструмента будет совпадать с курсом магнитного вектора полярной индукции, направление при этом зависит от тока.
- Принцип правой кисти. Если взять стержень в правую кисть так, что отставленный под прямым углом палец демонстрирует курс тока, то другие пальцы будут соответствовать направлению луча магнитной индукции, продуцируемого током. Путь магнитного вектора индукции прокладывается касательно линии отрезков.

Для подвижного проводника
В стержне из металла находится большое число свободных электронов, движение которых характеризуется как хаотичное. Если катушка движется в силовом электромагнитном поле вдоль линий, то фон отклоняет электроны, перемещающиеся одновременно с проводником. Их движение создает ЭДС (электродвижущую силу) и называется электромагнитной наведенной индукцией.
Под действием индукции заряженные частицы передвигаются и накапливаются в одном конце стержня, при этом на другом проявляется нехватка электронов. В результате такой ситуации зарождается положительный заряд и возникает разность потенциалов, появляется напряжение электричества.
Ток будет протекать под действием разности потенциалов при подсоединении такой катушки к внешней цепи по замкнутому контуру. При передвижении стержня по направлению силовых линий снижается до нуля воздействие поля на заряды. Не возникает электродвижущая сила, нет напряжения, отсутствует ток электронов.
ЭДС индукции равняется произведению рабочего размера проводника, скорости движения стержня и значения магнитной индукции. Ее направление устанавливается по закону правой руки. Ладонь располагается так, чтобы в нее были направлены линии силового поля, а отогнутый под 90° большой палец ставится вдоль движения стержня. В этом положении четыре распрямленных пальца покажут курс тока индукции.
Нахождение ЭДС по Максвеллу
Электродвижущее давление будет возникать при каждом пересечении стержня и силового поля. Результативным будет перемещение проводника, самого поля или изменение электромагнитных характеристик силового пространства.
ЭДС, полученная в контуре при состыковке его с изменяющимся силовым полем, измеряется скоростью трансформации магнитного потока. Направление индуцированной движущей силы идет так, что продуцируемый ею электрический ток противодействует реконструкции потоков магнитного излучения.
Изменение тока ведет к реформированию создаваемого им магнитного потока. Проходя через пространство, магнитное излучение стыкуется с соседними проводниками и со своим. В стержне наводится электродвижущая сила, которая носит название самоиндукции. Явление означает поддержку тока при его уменьшении и ослабление движения электронов при увеличении силы тока.
Если вращать буравчик по путям завихрения пространства, где возникают векторы, то его движение покажет направление кручения ротора. Это можно проследить, если четыре сжатых пальца правой кисти поставить по курсу завихрения. В этом случае отогнутый палец укажет путь движения ротора.
При растущем значении магнитного потока большой палец под прямым углом покажет прямое движение силового потока через контурные линии. В случае убывания электромагнитного излучения палец будет свидетельствовать об обратном направлении. Согнутые четыре пальца будут располагаться по путям противоположного направления ЭДС в контуре.

Для магнитного вектора индукции правила буравчика совпадают с законом Ампера — Максвелла. Но к электротоку через контур добавляется скорость трансформации силового поля через эту конфигурацию, а магнитное поле воспринимается только в случае его перемещения в пределах очертания.
Применение правил левой кисти:
- Ладонь ставится так, чтобы индукционные линии входили в центр внутренней стороны, а пальцы соответствовали токовому направлению. Отставленный большой палец определит путь силы, оказывающий давление на стержень со стороны силового поля. Мощь носит наименование силы Ампера.
- При втором варианте ладонь располагается так, чтобы линии силового поля входили под прямым углом в плоскость руки, а пальцы располагались по направлению перемещения положительных электронов или в противоположную сторону от отрицательных частиц. Тогда палец под углом 90° укажет путь приложения силы Лоренца.
Принцип винта или закон Максвелла для правой руки используется для прямого стержня с током.
 Но в электротехнике есть много случаев применения катушек, в которых проводник не является прямолинейной формой. Например, соленоид, в котором присутствует витковая обмотка провода.
Но в электротехнике есть много случаев применения катушек, в которых проводник не является прямолинейной формой. Например, соленоид, в котором присутствует витковая обмотка провода.Правило правой кисти для соленоида: нужно взять катушку индуктивности в правую руку так, чтобы пальцы показывали путь тока в оборотах, отставленный под 90° большой палец определит курс магнитных линий во внутренней части устройства. Зная полярность, легко вычислить путь прохождения электрического тока.
ПП Магнитное поле. Правило буравчика. Вектор магной индукции
Раздел долгосрочного плана:10.3В – Магнитные поля | Школа: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Дата: | Ф.И.О учителя: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Класс: 10 | Количество присутствующих: | отсутствующих: | |||||||||||||||||||||||||||||||||||||||||||||||||||||
Тема урока | Магнитное поле. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Цели обучения, которые достигаются на данном уроке (ссылка на учебную программу) | 10.4.1.1 – описывать величину, характеризующую магнитное поле проводников;
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Цели урока | Учащиеся должны: · Сформировать представление о магнитном поле как виде материии его свойствах · Усвоить понятие вектора магнитной индукции · Научиться применять правило «буравчика» для определения направления линий магнитной индукции · расширить знания учащихся о магнитных взаимодействиях | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Критерии оценивания | Учащийся достиг цели обучения, если… · Объясняет причину появления магнитного поле и его свойства; · Может применять правило «буравчика» для определения направления линий магнитной индукции | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Языковые цели
| Предметная лексика и терминология Учащиеся могут
проводить в классе дискуссии по темаммагнитное поле, правило буравчика, вектор
магнитной индукции, используя физические термины. Предметная лексика и терминология
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Привитие ценностей | Способность анализировать и давать оценку проблеме с различных точек зрения, формированию мировоззренческой идеи познаваемости явлений и свойств окружающего мира • данный урок направлен на привитие уважение и ответственности посредством парной и групповой работы при решении задач; • продолжить формирование представления о единстве природы • содействовать формированию мировоззренческой идеи познаваемости явлений и свойств окружающего мира; • умение применять знания теории на практике; • наблюдательность, самостоятельность; • мышление учеников посредством логических учебных действий; • побуждать
использовать полученные на уроках знания в повседневной жизни. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Межпредметные связи | география | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Навыки использования ИКТ | Доска — моделирование, презентация Калькуляторы — для сбора, обработки и презентации данных
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Предварительные знания
| Электрический ток, электрическая цепь, законы Ома для участка цепи и полной цепи | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Ход урока | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
Запланированные этапы урока |
Запланированная деятельность на уроке
|
Ресурсы | |||||||||||||||||||||||||||||||||||||||||||||||||||||
Начало 1-го урока
Середина урока
Начало 2-го урока | 1. Пояснение целей обучения, цели урока.Организациявнимания учащихся, приветствие учащихся, пожелание совместной плодотворной работы. 2. Вызов. Задание1.Угадайте, о каком предмете идет речь? 1. Признание на его изобретение оспаривают многие страны: Испания, Италия, Португалия, Франция, а также арабские страны; 2.Есть сведения, что этот предмет в виде статуэтки императора с вытянутой рукой помог китайским войскам совершить маневр в тумане и выиграть битву еще в 27 веке до н.э.; 3.Первое письменное упоминание об его использовании в мореплавании относится к 11 веку (компас).
Задание 2. Разгадайте ребус (компас)
3. Актуализация знаний.Приём «Корзина идей». Тема урока: Магнитное поле. Правило буравчика. Вектор магнитной индукции Индивидуальная
работа. Работа в парах. Учащиеся обмениваются информацией, выясняя, в чем совпали их мнения, а в чем возникли разногласия(3 мин). Работа с классом. На этом этапе каждая группа высказывает свое мнение по теме, приводит свои знания или высказывает идеи по данному вопросу. Причем ответы не должны повторятся. Все высказывания учитель кратко записывает на доске и делает дополнения по данному материалу. 4. Изучение нового материала Деление на группы способом «Сегментация круга» (деление на 2 группы). Работа в группах.Задание №1 Прием «Круглый стол» Проводится разбор текста: «Характеристики магнитного поля». 1.Каждая группа работает над своим текстом (10 мин). 2.Работа выполняется на постере, оформляется креативно (5мин). 3.Спикер каждой
группы выступает перед всем классом, отвечает на вопросы (Защита 15 мин). 1 группа: Магнитное поле и его характеристики.Линии Магнитной индукции. 2 группа: Правило Буравчика. Вектор магнитной индукции.
5. Подведение итогов, коррекция выступлений учащихся, пояснения учителя Магнитное взаимодействие 1. Демонстрационный эксперимент учителя.Опыт Эрстеда. (1820 г опыт Эрстеда — датский физик). 2. Демонстрационный эксперимент учителя.Опыт Ампера (1820 г опыт А. Ампера — французский физик). Вывод: магнитных зарядов в природе нет, взаимодействуют движущиеся электрические заряды. 3. Задание 3 (экспериментальное). Рассмотреть взаимное отталкивание и притяжение полюсов магнита. Сделать вывод. Выполняют учащиеся.
Магнитное поле и его свойства Особая форма материи, через которую осуществляется
взаимодействие между движущимися электрически заряженными частицами – магнитное
поле. — МП пронизывает различные среды. — МП не имеет границ — МП имеет два полюса: N – северный и S – южный — МП оказывает на рамку с током ориентирующее действие. — Изображается графически МП с помощью силовых линий. Создается МП не только электрическим током, но и постоянными магнитами. Вывод: движущиеся заряды (электрический ток) создают МП; по действию на электрический ток МП и обнаруживается.
Вектор магнитной индукции – это величина, количественно характеризующая МП. Направление магнитного поля устанавливают с помощью вектора магнитной индукции по правилу буравчика (штопора, правого винта):
Если направление поступательного движения буравчика указывает
движение тока в проводнике, то вращательное движение рукоятки буравчика
покажет направление линий магнитной индукции. Линии магнитной индукции Графически МП изображают с помощью линий магнитной индукции. Линиями магнитной индукции называют линии, касательные к которым направлены так же, как и вектор Вв данной точке поля
Линии магнитной индукции не имеют ни начала, ни конца и являются замкнутыми линиями.Если поле образовано такими линиями, то поле считается вихревым. Значит МП – вихревое. Задание 4. Экспериментальное. При помощи железных опилок, получить картину силовых линий постоянных магнитов. Зарисовать картины расположения силовых линий магнитного поля полосовых магнитов, расположенных одноименными; разноименными полюсами друг к другу.
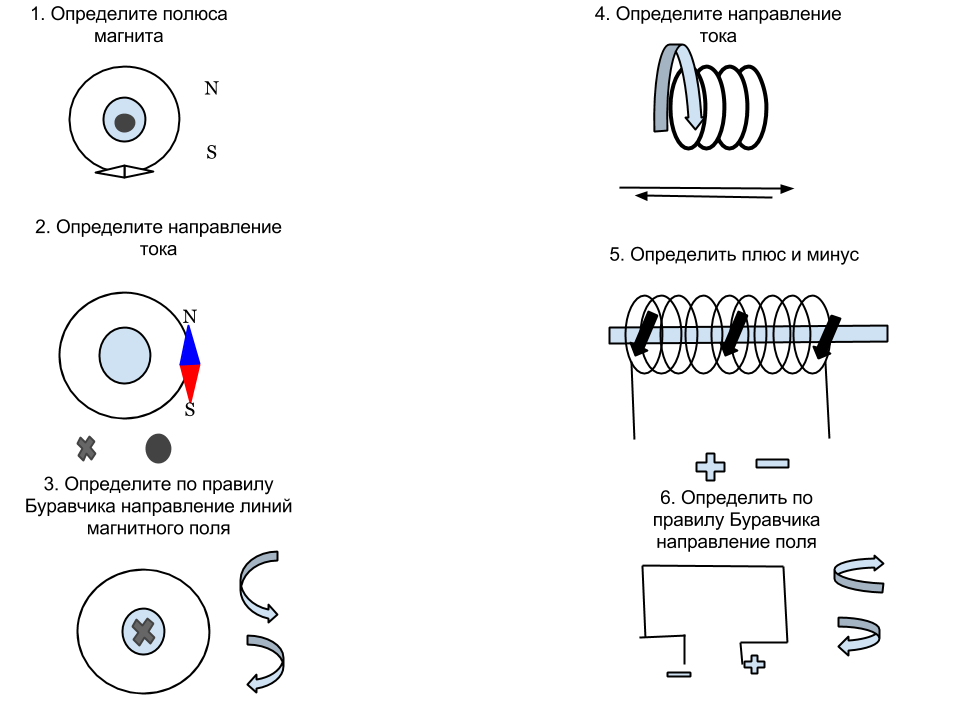
6. Закрепление. (Систематизация знаний). 1.
Электрический ток в прямолинейном проводнике направлен
перпендикулярно плоскости доски (листа тетради) и выходит из него. Как направлены
линии магнитной индукции? Изобразите на рисунке картину силовых линий
магнитного поля. 2. Электрический ток в прямолинейном проводнике направлен перпендикулярно плоскости доски (листа тетради) и входит в него. Как направлены линии магнитной индукции? Изобразите на рисунке картину силовых линий магнитного поля.
3. На рисунке показано направление тока в проводнике. Нарисуйте силовые линии магнитного поля и покажите направление вектора магнитной индукции в 3-х точках. Контрольный тест «Магнитное поле» Время: 7 мин Самопроверка. Приложение 2. Проведение ФО, с целью проверки освоенности изученного материала с целью выявления степени усвоения пройденного учебного материала данного урока. Прием «Круги по воде». Работа в парах. Время: 5 мин. Задание: каждая пара выбирает себе опорное слово. Например «Магнитное поле», «Магнитная индукция» и др. Оно записывается в столбик и на каждую букву подбираются существительные (глаголы, прилагательные, устойчивые словосочетания) к изучаемой теме. По сути, это небольшое исследование, которое может начаться в классе и иметь продолжение дома. |
Приложение 1
Приложение 2
Приложение 3
Приложение 4 | |||||||||||||||||||||||||||||||||||||||||||||||||||||
4. Подведение итогов. Рефлексия. Поблагодарить учеников за хорошую работу Рефлексия. Дать анализ работы класса, выделить кто из учащихся работал особенно старательно. Указать успешность овладения знаниями и недостатки,наметить пути их преодоления. Что нового узнали на уроке? Для чего это нужно? Какие трудности были на уроке? Удалось ли их преодолеть? Какие связи между предметами наблюдались? Домашнее задание:решение задач. Рымкевич№821, 822, 829 |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Дифференциация – каким образом Вы планируете оказать больше поддержки? Какие задачи Вы планируете поставить перед более способными учащимися? | Оценивание – как Вы планируете проверить уровень усвоения материала учащимися? Оценивание производится путем проведения формативного оценивания | Здоровье и соблюдение техники безопасности Точечный массаж биологически активных точек лица и головы, чтобы окончательно «разбудить» детей и задать соответствующий рабочий настрой на целый учебный день. При массаже активизируется кровообращение в кончиках пальчиков, что предотвращает застой крови не только в руках, но и во всем теле, так как кончики пальцев непосредственно связаны с мозгом. | |||||||||||||||||||||||||||||||||||||||||||||||||||||
Более способные учащиеся могут выполнять роли «экспертов» и оказывать помощь и в группе |
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||
Рефлексия по уроку
Были ли цели урока/цели обучения реалистичными? Все ли учащиеся достигли ЦО? Если нет, то почему? Правильно ли проведена дифференциация на уроке? Выдержаны ли были временные этапы урока? Какие отступления были от плана урока и почему? | Используйте данный раздел для размышлений об уроке. Ответьте на самые важные вопросы о Вашем уроке из левой колонки. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Общая оценка
Какие два аспекта урока прошли хорошо (подумайте, как о преподавании, так и об обучении)? 1:
2:
Что могло бы способствовать улучшению урока (подумайте, как о преподавании, так и об обучении)? 1:
2:
Что я выявил(а) за время урока о классе или достижениях/трудностях отдельных учеников, на что необходимо обратить внимание на последующих уроках? | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Правило буравчика. Вектор
магнитной индукции.
Правило буравчика. Вектор
магнитной индукции.

 Организационный
момент
Организационный
момент Каждый ученик тезисно записывает в тетради все, что ему известно по теме«Магнитное
поле»(2-3 мин).
Каждый ученик тезисно записывает в тетради все, что ему известно по теме«Магнитное
поле»(2-3 мин).
 – Существует МП около проводников с током и порождается током.
– Существует МП около проводников с током и порождается током.
Приложение 1
Группа 1
Магнитная индукция.
Магнитное поле характеризуется вектором магнитной индукции. Правило буравчика позволяет определить направление вектора магнитной индукции проводника с током. Все магнитные поля вихревые.
Характеристикой магнитного поля является вектор магнитной индукции или индукции магнитного поля, обозначаемый В. За направление вектора магнитной индукции в данной точке поля принимают направление, в котором указывает N-полюс свободно вращающейся магнитной стрелки (рис. 1а). Ориентацию рамки с током в магнитном поле тоже можно использовать для определения направления вектора магнитной индукции, так как её плоскость устанавливается в поле перпендикулярно вектору магнитной индукции. При этом направление вектора магнитной индукции определяют с помощью правила правого буравчика, согласно которому, если вращать ручку буравчика по направлению тока в рамке, то сам буравчик будет перемещаться в направлении вектора магнитной индукции (рис. 1б). Направление, в котором перемещается правый буравчик, ещё называют положительной нормалью к плоскости рамки с током.
Линиями магнитной индукции называют линии, касательные к которым имеют то же направление, что и вектор магнитной индукции в этой точке поля. Линии магнитной индукции служат силовыми характеристиками поля, как и силовые линии электрического поля. Очевидно, что, как и силовые линии электрического поля, линии магнитной индукции не могут пересекаться между собой. Картину линий магнитной индукции поля можно построить с помощью магнитной стрелки или рамки с током, помещая их в различные точки поля.
Как следует из опытов Эрстеда, прямолинейный проводник с током создаёт вокруг себя магнитное поле. На рис.1в показаны линии магнитной индукции поля прямолинейного проводника, которые представляют собой концентрические окружности, лежащие в плоскости, перпендикулярной этому проводнику. Направление вектора магнитной индукции в этом случае можно определить опять же с помощью правого буравчика: если направление поступательного движения буравчика совпадает с направлением тока, то направление движения ручки буравчика указывает на направление вектора магнитной индукции.
Видно (рис.1в), что линии магнитной индукции прямолинейного проводника с током оказались замкнутыми, т.е. линиями без начала и конца. Поля, характеризуемые замкнутыми силовыми линиями, называют вихревыми.
Рис. 1. (а) – определение направления вектора магнитной индукции с помощью магнитной стрелки; (б) — применение правила буравчика для определения направления вектора магнитной индукции и положительной нормали рамки с током; (в) — применение правила буравчика для определения направления вектора магнитной индукции прямолинейного проводника с током.
Группа 2
Вектор магнитной индукции.Правило Буравчика.
Вектор магнитной индукции (В) – аналог напряженности электрического поля. Основной силовой характеристикой магнитного поля является вектор магнитной индукции.
Направление этого вектора для поля прямого проводника с током и соленоида можно определить по правилу буравчика: если направление поступательного движения буравчика (винта с правой нарезкой) совпадает с направлением тока, то направление вращения ручки буравчика покажет направление линий магнитной индукции. Вектор магнитной индукции направлен по касательной к линиям.
Правило буравчика и правой руки Закон буравчика используется для определения направленности напряженности магнитного поля. Оно работает при условии прямолинейного расположения магнитного поля, относительно проводника с током.
Это правило заключается в совпадении направленности магнитного поля с направленностью рукоятки буравчика, при условии вкручивания буравчика с правой нарезкой в направлении электрического тока. Данное правило применяется и для соленоидов. В этом случае, большой палец, оттопыренный на правой руке, указывает направление линий магнитной индукции. При этом, соленоид обхватывается так, что пальцы указывают направление тока в его витках. Обязательным условием является превышение длиной катушки ее диаметра.
Приложение 2
Эксперименты.
Демонстрационный эксперимент учителя.
Опыт Эрстеда.
Оборудование: стрелка магнитная демонстрационная на подставке, реостат со скользящим контактом, источник тока, провода соединительные.
Этапы проведения эксперимента
1. Соберите установку согласно рисунку 1. Провод должен быть такой длины, чтобы его можно было, слегка сгибая и выправляя в тех или иных местах, расположить горизонтально на расстоянии 1 см над стрелкой.
Рисунок 1
2. Расположите проводник по направлению стрелки компаса (рисунок 1, а) и включите ток. Стрелка поворачивается и устанавливается перпендикулярно к проводнику (рисунок 1, б). О чем это свидетельствует?
3. Изменив направление тока в проводнике на противоположное, опишите наблюдаемое явление и сделайте выводы из проведенных исследований.
Группа 1. Подвесьте на нити железную пластинку. К одному концу ее поднесите магнит. Пластинка притягивается. Поменяйте местами пластинку и магнит. Поднесите пластинку к висящему магниту. Почему магнит притягивается к железной пластинке?
Группа 2. Опыт с железными опилками.
Приложение 3
Практическая работа.
1. Положите магнит на стол.
2. Поднесите к нему другой магнит сначала одним полюсом, а затем другим.
3. Соедините два магнита противоположными полюсами.
4. Поместите на получившийся магнит кусок плотной бумаги.
5. Сверху аккуратно насыпьте металлические опилки.
Ответьте на вопросы:
1. Как взаимодействуют два магнита?
2. Как зависит густота силовых линий от расстояния до магнита?
3. Какую форму имеют силовые линии магнитного поля?
Приложение 4
ФИ учащегося______________________________Класс_______Дата____________
Раздел 10.3В – Магнитные поля
Тема: Магнитное поле. Правило буравчика. Вектор магнитной индукции.
Цельобучения | · обобщить и систематизировать знания о магнитном поле · проверить умение анализировать и решать простые и комбинированные задачи, требующие использование многих форм и методов логического мышления (применение математических знаний: арифметические, алгебраические, геометрические, графические) | Балл |
Уровнимыслительныхнавыков | · Знание и понимание · Применение | |
Критерийоценивания | Учащийся:
|
4 |
| 1 | |
| 1 | |
| 1 | |
|
| 2 |
| ||
|
| 2 |
| ||
|
| 2 |
| ||
Время выполнения | 13 |
Задание № 1
Тест
1. Магнитное поле порождается ___________ (электрическим током).
2. Магнитное поле создается ______________ (движущимися)заряженными частицами.
3. За направление магнитной линии в какой-либо ее точке условно принимают направление, которое указывает _________ (северный) полюс магнитной стрелки, помещенной в эту точку.
4.Магнитные линии выходят из _________ (северного)полюса магнита и входят в (южный)________.
Задание № 2 .
Решение задач
1. Определите направление силы, действующую на проводник
2. Найдите и объясните ошибку
3. Определите в какую сторону направлены силы Ампера
4. Максимальный вращающийся момент, действующий на рамку площадью 1 см2, находящуюся в магнитном поле, равен 2 мкН·м. Сила тока в рамке 0,5 А. Найти индукцию магнитного поля.
5. С какой силой действует магнитное поле индукцией 10мТл на проводник, в котором сила тока 50 А, если длина активной части проводника 0,1 м? Линии индукции поля и ток взаимно перпендикулярны.
6. В проводнике с длиной активной части 8 см сила тока равна 50 А. Он находится в однородном магнитном поле индукцией 20 мТл. Какую работу совершил источник тока, если проводник переместился на 10 см перпендикулярно линиям индукции?
7.
Направление тока и линий его магнитного поля. Правило буравчика
Исследования Ампера…
принадлежат к числу самых
блестящих работ, которые
проведены когда-либо в науке.
Джеймса Клерка Максвелла
Магнитное поле — это силовое поле, действующее на движущиеся электрические заряды.
Для наглядного представления магнитного поля пользуются магнитными линиями Магнитные линии — это воображаемые линии, вдоль которых расположились бы маленькие магнитные стрелки, помещенные в магнитное поле.
Замкнутость линий магнитного поля представляет собой фундаментальное свойство магнитного поля. Оно свидетельствует о том, что магнитных зарядов, подобных электрическим, в природе нет.
За направление магнитной линии в какой-либо ее точке условно принимают направление, которое указывает северный полюс магнитной стрелки, помещенной в эту точку.
Теперь разберём, от чего зависит направление линий магнитного поля тока более подробно.
Известно, что для получения спектра магнитного поля прямого проводника с током, его можно пропустить через лист картона, а на картон насыпать железные опилки. Под действием магнитного поля железные опилки располагаются по концентрическим окружностям. Поместим вдоль линий магнитного поля магнитные стрелки.
На рисунке показано расположение магнитных стрелок вокруг проводника с током, перпендикулярного плоскости чертежа. Если изменить направление тока в проводнике, то можно увидеть, что изменение направления тока приводит к повороту всех магнитных стрелок на 1800. Причем оси стрелок располагаются по касательной к магнитным линиям.
Т.о. можно сделать вывод, что направление линий магнитного поля будет зависеть от направления тока в проводнике.
Эта связь может быть выражена простым правилом, которое называют правилом буравчика (или правилом правого винта).
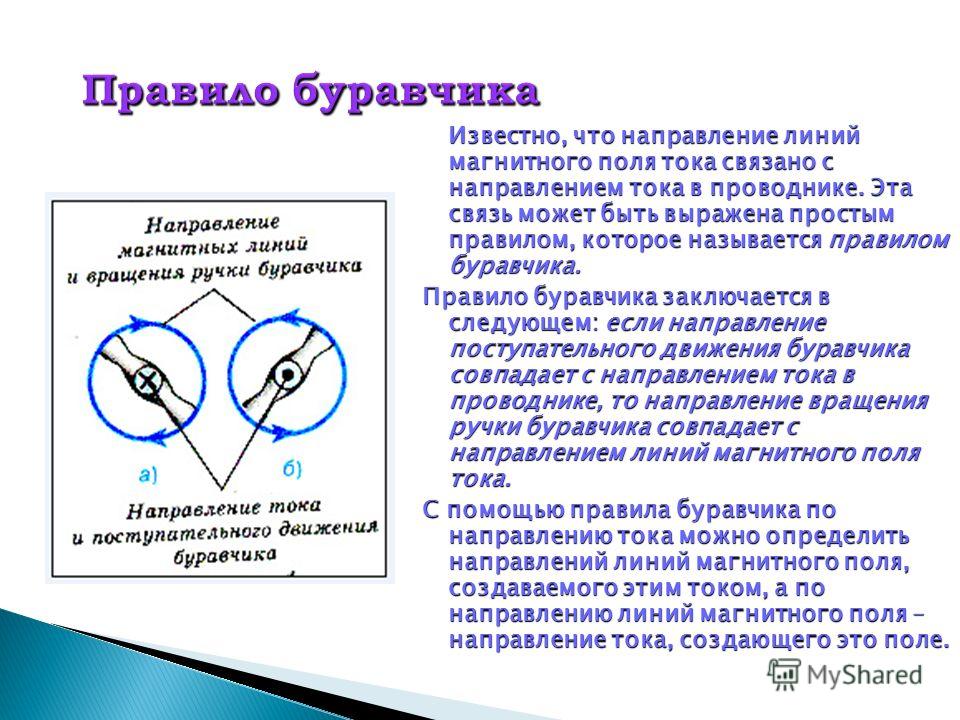
Правило буравчика заключается в следующем: если поворачивать головку винта так, чтобы поступательное движение острия винта происходило вдоль тока в проводнике, то направление вращения головки указывает направление линий магнитного поля тока.
С помощью правила буравчика по направлению тока можно определить направление линий магнитного поля, создаваемого этим током, а по направлению линий магнитного поля — направление тока, создающего это поле.
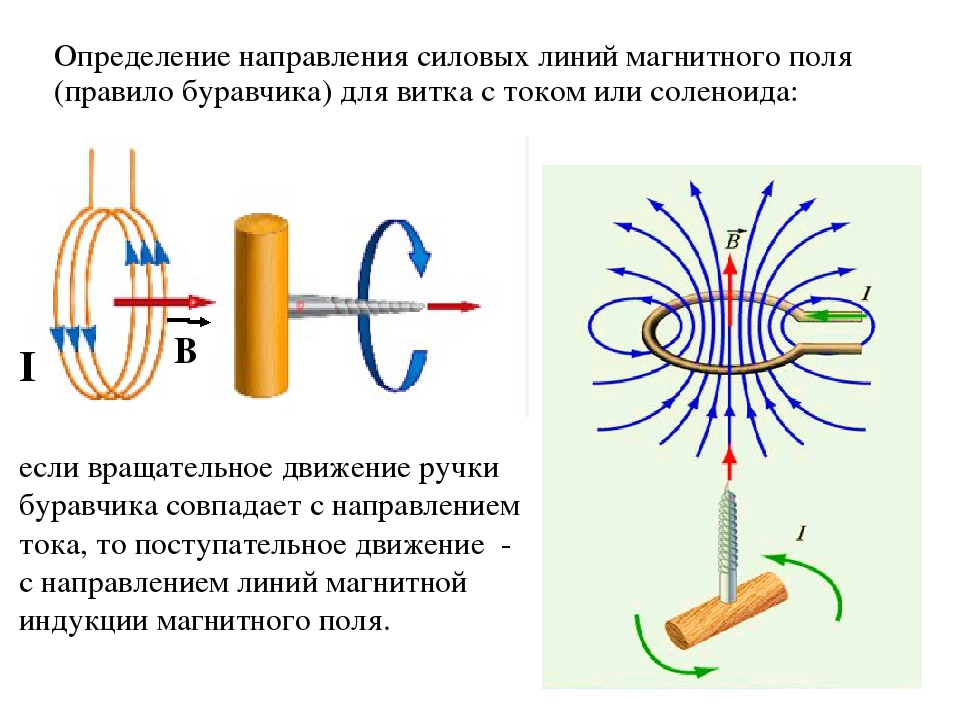
Для определения направления линий магнитного поля соленоида удобнее пользоваться другим правилом, которое иногда называют правилом правой руки.
Соленоид — это катушка цилиндрической формы из проволоки, витки которой намотаны вплотную друг к другу в одном направлении, а длина катушки значительно больше радиуса витка. Магнитное поле соленоида можно представить как результат сложения полей, создаваемых несколькими круговыми токами, имеющими общую ось.
На рисунке видно, что внутри соленоида линии магнитного поля каждого отдельного витка имеют одинаковое направление, тогда как между соседними витками они имеют противоположное направление. Поэтому, при достаточно плотной намотке соленоида, противоположно направленные участки линий магнитного поля соседних витков взаимно уничтожаться, а одинаково направленные участки сольются в общую линию.
Изучение этого поля с помощью железных опилок показало, что внутри соленоида магнитные линии поля представляют собой прямые, параллельные оси соленоида, которые расходятся на его концах и замыкаются вне соленоида.
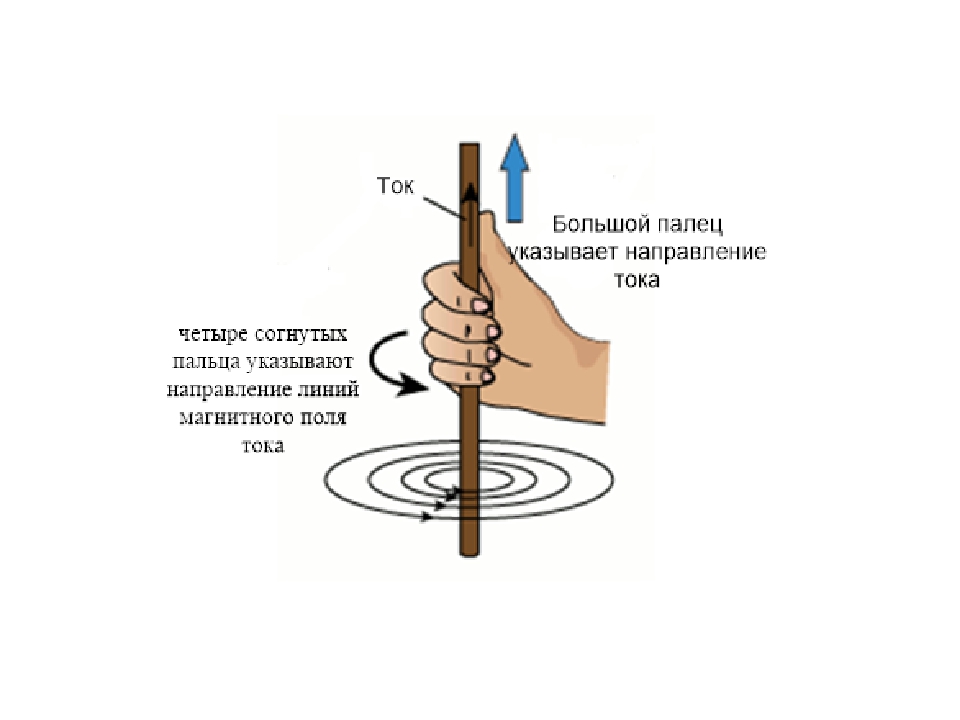
Зная направление тока в витке, полюсы соленоида можно определить с помощью правила правой руки: если обхватить соленоид, ладонью правой руки, направив четыре пальца по направлению тока в витках, то отставленный большой палец покажет направление линий магнитного поля внутри соленоида.
Правило правой руки можно применять и для определения направления линий магнитного поля в центре одиночного витка с током.
Из курса физики 8 класса известно, что на всякий проводник с током, помещенный в магнитное поле и не совпадающий с его магнитными линиями, это поле действует с некоторой силой.
Наличие такой силы можно показать с помощью установки. Проволочная трехсторонняя рамка ABCD подвешена на крюках так, что может свободно отклоняться от вертикали.
Сторона ВС находится в области наиболее сильного поля дугообразного магнита, располагаясь между его полюсами. Рамка присоединена к источнику тока последовательно с реостатом и ключом. При замыкании ключа в цепи возникает электрический ток, и сторона ВС втягивается в пространство между полюсами.
Если убрать магнит, то при замыкании цепи проводник ВС двигаться не будет. Значит, со стороны магнитного поля на проводник с током действует некоторая сила, отклоняющая его от первоначального положения.
Таким образом, магнитное поле создается электрическим током и обнаруживается по его действию на электрический ток.
Если изменить направление тока в цепи, поменяв местами провода в гнездах изолирующего штатива, то, при этом, изменится и направление движения проводника, а значит, и направление действующей на него силы.
Направление силы изменится и в том случае, если, не меняя направления тока, поменять местами полюсы магнита (т. е. изменить направление линий магнитного поля).
Следовательно, направление тока в проводнике, направление линий магнитного поля и направление силы, действующей на проводник, связаны между собой.
Направление силы, действующей на проводник с током в магнитном поле, можно определить, пользуясь правилом левой руки, которое заключается в следующем: если левую руку расположить так, чтобы линии магнитного поля входили в ладонь перпендикулярно к ней, а четыре вытянутых пальца были направлены по току, то отставленный на 90° большой палец покажет направление действующей на проводник силы.
Пользуясь правилом левой руки, следует помнить, что за направление тока во внешней части электрической цепи (т. е. вне источника тока) принимается направление от положительного полюса источника тока к отрицательному. Другими словами, четыре пальца левой руки должны быть направлены против движения электронов в электрической цепи.
С помощью правила левой руки можно определить направление силы, с которой магнитное поле действует на отдельно взятую движущуюся в нем частицу, как положительно, так и отрицательно заряженную. Для наиболее простого случая, когда частица движется в плоскости, перпендикулярной магнитным линиям, это правило формулируется следующим образом: если левую руку расположить так, чтобы линии магнитного поля входили в ладонь перпендикулярно к ней, а четыре пальца были направлены по движению положительно заряженной частицы (или против движения отрицательно заряженной), то отставленный на 90° большой палец покажет направление действующей на частицу силы.
Следует отметить, что сила действия магнитного поля на проводник с током или движущуюся заряженную частицу равна нулю, если направление тока в проводнике или скорость частицы совпадают с линией магнитной индукции или параллельны ей.
Основные выводы:
– Направление линий магнитного поля будет зависеть от направления тока в проводнике.
– Эта связь может быть выражена с помощью правила буравчика (или правила правого винта): если поворачивать головку винта так, чтобы поступательное движение острия винта происходило вдоль тока в проводнике, то направление вращения головки указывает направление линий магнитного поля тока.
– Для определения направления линий магнитного поля соленоида удобнее пользоваться правилом правой руки: если обхватить соленоид ладонью правой руки, направив четыре пальца по направлению тока в витках, то отставленный большой палец покажет направление линий магнитного поля внутри соленоида.
– Магнитное поле действует с некоторой силой на любой проводник с током, находящийся в этом поле. Направление этой силы можно определить с помощью правила левой руки: если левую руку расположить так, чтобы линии магнитного поля входили в ладонь перпендикулярно к ней, а четыре вытянутых пальца были направлены по току, то отставленный на 90° большой палец покажет направление действующей на проводник силы.
определение кардана от Free Dictionary
Лампа извивалась в карданном подвесе, расшатанные книги кувыркались на полке из стороны в сторону, длинный барометр качался резкими кругами, стол каждую секунду менял наклон.
Лампа извивалась в подвесах, барометр качался по кругу, стол каждую секунду менял наклон; мимо дивана проскользнула пара мягких морских сапог с обвалившимися голенищами.
Там были контрольный компас, морские фонари в подвесах, карты с синей обложкой, небрежно свернутые и спрятанные, сигнальные флаги в алфавитном порядке и разделители моряка, вбитые в деревянные конструкции, чтобы держать календарь.Войдя в свою комнату, ярко освещенную большой лампой на переборке, подвешенной на подвесах над моим письменным столом, я нигде не увидел его, пока он тихо не вышел из-за пальто, висящих в углублении. «Мы рады представить первый стабилизатор DJI с складной дизайн, и мы надеемся, что он вдохновит наших клиентов на новые способы записи контента с помощью своих мобильных телефонов ». Ключевые производители, о которых идет речь в этом отчете: BlueCats Estimote Gimbal Gelo Glimworm Beacons IBeacon В отчетах анализируется глобальный рынок устройств Bluetooth Beacon по типам продуктов: IBeacon Eddystone Microsoft 10 Отчеты анализируют рынок устройств Bluetooth Beacon в мире, а также по приложениям: Розничная торговля Путешествия и туризм Здравоохранение Финансовые учреждения Другие покупают этот отчет: https: // www.orbisresearch.com/contact/purchase-single-user/2465730 Целями исследования данного отчета являются: — Анализ глобального статуса устройства Bluetooth Beacon, будущего прогноза, возможностей роста, ключевых рынков и ключевых игроков. путем внедрения технологии Volt непосредственно в На верхней сцене мы значительно уменьшили расстояние между верхом кардана и верхом сцены для более компактной конструкции. С модулем камеры, прикрепленным к 3-осевому механическому кардану с бесщеточным двигателем, Osmo Pocket создает высококачественные видео без размытие или дрожание, возникающие при записи видео на цифровую зеркальную камеру с электронной стабилизацией или на смартфон с оптической стабилизацией изображения.9 января 2019 г. — американская платформа для управления приближением и местоположением Gimbal приобрела бизнес-подразделение управляемых медиа калифорнийской компании мобильной аналитики UberMedia, сообщила компания. DJI анонсировала новый продукт, который представляет собой не дрон, а небольшую камеру. с трехосным стабилизированным карданом. Новая экшн-камера, получившая название DJI Osmo Pocket, теперь доступна для предварительного заказа за 349 долларов. Бахуйзен использовал электронный стабилизатор с камерой Sony Action Camera, прикрепленной за его парапланом. Компания заявила, что эта функция «упрощает съемку профессионально выглядящих изображений. Стабилизированное видео, подобное подвесу, без затрат на моторизованный стабилизатор.HyperSmooth работает под водой, а также при сильных ударах и ветре, когда подвесы выходят из строя ». Наряду с HERO7 Black, GoPro также представила новую форму видео под названием TimeWarp, которая преобразует более длительные впечатления в короткие плавные видеоролики.Gimbal Protocol v2 · Руководство разработчика MAVLink
Эта версия помечена как незавершенная. Это означает, что он все еще может быть изменен.
ВведениеЭта версия заменяет Gimbal Protocol v1
Протокол Gimbal позволяет MAVLink контролировать положение / ориентацию камер (или других датчиков), установленных на дроне.Ориентация может контролироваться пилотом в режиме реального времени (например, с помощью джойстика с наземной станции), устанавливаться как часть миссии или перемещаться на основе отслеживания камеры.
Протокол также определяет, какая информация о статусе публикуется для разработчиков, конфигураторов, а также пользователей дрона. Кроме того, он предоставляет способы назначать управление различным источникам.
Протокол поддерживает ряд настроек оборудования и позволяет использовать подвесы с различными возможностями.
Основные понятия Gimbal Manager и Gimbal DeviceОригинальный проект протокола можно найти здесь.
Для размещения подвесов с различными возможностями и различными настройками оборудования «подвес» концептуально разделен на две части:
- Gimbal Device: фактическое устройство gimbal , железо и софт.
- Gimbal Manager: программное обеспечение для устранения конфликтов сообщений и команд карданного подвеса из различных источников, а также для отвлечения возможностей карданного подвеса от пользователей карданного подвеса.
Gimbal Manager и Gimbal Device предоставляют соответствующие наборы сообщений , которые можно использовать для: управления подвесом / обнаружения устройства, возможностей запросов, состояния публикации и различных типов управления ориентацией / ориентацией.
Ключевой концепцией, которую необходимо понять, является то, что Gimbal Manager имеет отношение 1: 1 с конкретным карданным устройством и является единственной стороной в сети MAVLink, которой разрешено напрямую управлять этим устройством — она делает это, используя набор сообщений Gimbal Device .
Устройство Gimbal Device должно действовать только в ответ на сообщения, поступающие от соответствующего Gimbal Manager ! Однако устройство будет транслировать свой статус всем сторонам в сети (не только своему менеджеру).
Приложения MAVLink (наземные станции, API для разработчиков, такие как MAVSDK и т. Д.) И любое другое программное обеспечение, которое хочет управлять конкретным стабилизатором, должны делать это через его Gimbal Manager , используя набор сообщений Gimbal Manager .
Обратите внимание, что менеджер подвеса (по умолчанию) реализован на автопилоте.
Общие настройкиВ этом разделе описаны три наиболее распространенные настройки оборудования.
Простой подвес, напрямую подключенный к автопилотуВ этой (по умолчанию) настройке автопилот берет на себя роль менеджера подвеса.
Автономная интегрированная камера / подвесВ этой конфигурации встроенная камера / подвес может быть самим устройством Gimbal Manager .
Таким образом, интерфейс стабилизатора является внутренним (реализация не требуется).
Бортовой компьютер с камерой и стабилизатором, подключенным к автопилотуВ этой настройке Gimbal Manager может находиться на бортовом компьютере.
Команды от GCS (и т. Д.) Отправляются на Gimbal Manager на сопутствующем компьютере. Сообщения от Gimbal Manager к Gimbal Device должны быть отправлены / маршрутизированы через автопилот.
Несколько стабилизаторовПоддерживаются несколько стабилизаторов на дрон.
компонентов идентификаторы Несколько идентификаторов компонентов зарезервированы для карданных устройств: MAV_COMP_ID_GIMBAL , , MAV_COMP_ID_GIMBAL2 MAV_COMP_ID_GIMBAL3 , MAV_COMP_ID_GIMBAL4 , MAV_COMP_ID_GIMBAL5 , MAV_COMP_ID_GIMBAL6 .
По возможности следует использовать перечисленные идентификаторы компонентов (можно использовать другие идентификаторы, если для MAV_TYPE правильно установлено значение MAV_TYPE_GIMBAL).
Сопоставление от менеджеров карданов к устройствам карданного подвесаКаждый Gimbal Manager должен публиковать свое связанное с ним устройство карданного подвеса (соотношение 1: 1) в своем сообщении GIMBAL_MANAGER_INFORMATION.
Конкретный компонент MAVLink может реализовывать несколько менеджеров подвесов (например, автопилот может реализовать два менеджера подвесов для управления двумя устройствами подвеса).
Адресация устройств GimbalGimbal Manager Команды и сообщения имеют поле param для указания идентификатора компонента Gimbal Device , которым они собираются управлять.
Система, которая хочет управлять конкретным устройством подвеса , будет отправлять сообщения компоненту, у которого есть диспетчер (ы), с указанием конкретного устройства, которым необходимо управлять.
Если все устройства карданного подвеса должны управляться (на компоненте, который имеет менеджеры подвеса), этот параметр / поле может быть установлено в 0 (сигнализирует «все»).
Реализация и сообщения Сообщения между наземной станцией и Gimbal Manager Обнаружение Gimbal Manager Наземная станция должна сначала обнаружить все стабилизаторы, отправив широковещательное сообщение MAV_CMD_REQUEST_MESSAGE для GIMBAL_MANAGER_INFORMATION.Каждый менеджер подвеса должен ответить GIMBAL_MANAGER_INFORMATION .
GIMBAL_MANAGER_INFORMATION содержит важную информацию, такую как возможности подвеса (GIMBAL_MANAGER_CAP_FLAGS), максимальные углы и угловые скорости, а также gimbal_component , который является идентификатором компонента Gimbal Manager Gimbal Device , управляемым этим устройством Gimbal Manager .
Gimbal Manager должен отправлять GIMBAL_MANAGER_STATUS с низкой регулярной скоростью (например,грамм. 5 Гц) для информирования наземной станции о своем состоянии.
Запуск / настройка управления подвесомВозможно, несколько компонентов захотят управлять подвесом одновременно, например: наземная станция, вспомогательный компьютер или автопилот, выполняющий задание.
Чтобы начать управление стабилизатором, компонент сначала должен отправить команду MAV_CMD_DO_GIMBAL_MANAGER_CONFIGURE. Это позволяет установить, какой компонент MAVLink (установленный идентификатором системы и идентификатором компонента) находится в первичном управлении, а какой — во вторичном.Менеджер подвеса должен игнорировать любые элементы управления подвесом, поступающие от компонентов MAVLink, для которых явно не установлено значение «под контролем». Это должно предотвратить конфликты между различными входами, пока все компоненты работают справедливо / взаимодействуют при использовании команды configure.
Сотрудничество предполагает следующие правила:
- Не отправляйте команду configure Manager configure непрерывно, а только один раз для запуска и один раз для повторной остановки управления.
- Проверьте GIMBAL_MANAGER_STATUS, кто в первую очередь контролирует, и, если возможно, предупредите пользователя о запланированном действии.Например, если автопилот управляет стабилизатором в рамках миссии, наземная станция должна сначала спросить пользователя (то есть через всплывающее окно), действительно ли он хочет взять на себя ручное управление.
- Не забудьте освободить управление после завершения действия / задачи и установить sysid / compid равным 0.
Ручное управление подвесом с помощью MAVLinkМожно назначить управление и другому компоненту, а не только самому себе. Например, интеллектуальный снимок, запущенный на компьютере-компаньоне, может быть настроен на первичное управление, но назначить наземную станцию для вторичного управления e.грамм. подтолкнуть во время умного выстрела.
Примечание Реализация того, как первичное и вторичное управление объединяется или смешивается, определяется не протоколом, а до реализации. Это обеспечивает гибкость для различных вариантов использования.
Наземная станция может вручную управлять подвесом, отправив GIMBAL_MANAGER_SET_MANUAL_CONTROL. Это позволяет управлять стабилизатором либо с помощью углов, либо с угловой скоростью, используя нормализованную единицу (-1..1). Подвес отвечает за перевод входных данных в зависимости от настроек угла, скорости и «плавности».
Этот вход может дополнительно масштабироваться менеджером подвеса в зависимости от его состояния. Например, если менеджер подвеса находится на камере и знает текущий уровень масштабирования / фокусное расстояние камеры, он может уменьшить угловую скорость для поддержки плавного панорамирования и наклона.
Управление углом подвеса и / или угловой скоростью с помощью MAVLinkНаземная станция, сопутствующий компьютер или другой компонент MAVLink может устанавливать угол подвеса и / или угловые скорости с помощью сообщений GIMBAL_MANAGER_SET_ATTITUDE или GIMBAL_MANAGER_ANAGER_SET_TIL_TIL.
Сообщения между Gimbal Manager и устройством Gimbal Обнаружение устройства Gimbal Узлу MAVlink, на котором реализован Gimbal Manager , необходимо обнаружить Gimbal Devices , отправив широковещательное сообщение MAV_CMD_REQUEST_MESSAGE для GIMBAL_ATION_INFORM_INFORM_INFORM. Каждое подвесное устройство должно ответить GIMBAL_DEVICE_INFORMATION .
Узел MAVLink должен затем создать столько экземпляров Gimbal Manager , сколько найдено Gimbal Devices .
Управление подвесомДля управления углом и / или угловой скоростью подвеса используйте сообщение GIMBAL_DEVICE_SET_ATTITUDE. Если у менеджера подвеса есть несколько доступных входов для управления подвесом, он должен разрешить их конфликты, как описано ниже.
Состояние автопилота для карданного подвесаАвтопилот также должен отправить сообщение AUTOPILOT_STATE_FOR_GIMBAL_DEVICE на подвесное устройство. Эти данные требуются устройством для оценки положения Gimbal Device (компенсация горизонта), а также для прогнозирования движений транспортного средства (например.грамм. угловая скорость прямой связи по оси z, поэтому текущее намерение рыскания).
Широковещательные сообщения / сообщения о состоянии устройства карданного подвесаПодвесное устройство должно регулярно отправлять информацию о своем положении и статусе в GIMBAL_DEVICE_ATTITUDE_STATUS, например 10 Гц.
Это сообщение является широковещательным, поэтому оно устанавливается для GCS, Gimbal Manager и всех сторон в сети (а не только Gimbal Manager , как все другие сообщения).
Пользовательские настройки карданного подвесаПользовательские настройки карданного подвеса можно выполнить с помощью микросервиса информации о компонентах, который основан на файле информации о компоненте (аналогично файлу определения камеры).
FAQ Как установить системный идентификатор карданного устройства?Системный идентификатор всех компонентов (например, автопилота, сопутствующего компьютера, камеры, стабилизатора) на дроне / системе должен быть одинаковым. Это должно быть выполнено вручную путем настройки или, в качестве альтернативы, компоненты должны прослушивать пульс автопилота, а затем соответствующим образом корректировать свой системный идентификатор.
Когда устройство Gimbal также может использоваться в качестве менеджера Gimbal Manager?По умолчанию следует использовать Gimbal Manager в автопилоте.Единственным исключением из этого правила являются интегрированные решения, содержащие камеру и стабилизатор для таких функций, как визуальное отслеживание.
Как проверить карданный подвес?A Gimbal Device можно проверить, подключив его к автопилоту с помощью Gimbal Manager . Чтобы избежать необходимости выполнять полную настройку, включая автопилот, доступен прямой тест с использованием MAVSDK.
Как управлять стабилизатором по старому протоколу MAVLink?Gimbals, которые используют (старый) Gimbal Protocol v1, по-прежнему должны поддерживаться программным обеспечением автопилота.По сути, Gimbal Manager должен переводить команды на старый протокол.
Как управлять стабилизатором без поддержки MAVLink?Подвесы, управляемые с использованием протокола PPM, PWM, SBUS или чего-то проприетарного, все еще могут поддерживаться. Автопилот должен действовать как Gimbal Manager и предоставлять драйвер и перевод в соответствующий протокол.
А как насчет управления RC (не MAVLink)?Автопилот должен быть настроен либо на прием ввода MAVLink (так GIMBAL_MANAGER_SET_MANUAL_CONTROL), либо на управление RC.В обоих случаях автопилот может затем рассчитать угол подвеса или угловую скорость на основе входных данных ручного управления и отправить полученное заданное значение на устройство подвеса.
Для дистанционного управления каналы должны быть вручную сопоставлены / настроены для управления стабилизатором. Это тот же подход, который используется для управления входным источником для полета; выбор RC или MAVLink зависит от реализации. Рекомендуется сделать его настраиваемым с помощью (например) параметра.
Сводка сообщений / команд / перечислений Сообщения менеджера подвесаЭто набор сообщений / перечислений для связи с менеджером подвеса (наземной станцией, автопилотом и т. Д.)).
| Команда | Описание |
|---|---|
| MAV_CMD_REQUEST_MESSAGE | Запросить у целевой системы (ей) один экземпляр указанного сообщения. Это используется для запроса GIMBAL_MANAGER_INFORMATION. |
| MAV_CMD_DO_GIMBAL_MANAGER_CONFIGURE | Конфигурация подвеса, чтобы установить, какой sysid / compid находится в первичном и вторичном управлении. |
| GIMBAL_MANAGER_SET_MANUAL_CONTROL | Сообщение высокого уровня для управления подвесом вручную, без единиц.Фактические углы или угловые скорости будут получены менеджером подвеса на основе настроек. Это сообщение должно быть отправлено менеджеру подвеса (например, с наземной станции). Углы и скорости могут быть установлены на NaN в соответствии с вариантом использования. |
| MAV_CMD_DO_GIMBAL_MANAGER_TILTPAN | Уставка высокого уровня для отправки менеджеру подвеса для установки положения подвеса. Примечание: стабилизатор никогда не должен реагировать на эту команду, а только его менеджер. |
| MAV_CMD_DO_SET_ROI_LOCATION | Задает местоположение области интереса (ROI).Затем это может использоваться системой управления транспортного средства для управления ориентацией транспортного средства и положением различных датчиков, таких как камеры. Эту команду можно отправить менеджеру подвеса, но не устройству подвеса. Подвес не должен реагировать на это сообщение. |
| MAV_CMD_DO_SET_ROI_WPNEXT_OFFSET | Устанавливает интересующую область (ROI) к следующей путевой точке с дополнительным смещением тангажа / крена / рыскания. Затем это может использоваться системой управления транспортного средства для управления ориентацией транспортного средства и положением различных датчиков, таких как камеры.Эту команду можно отправить менеджеру подвеса, но не устройству подвеса. Подвес не должен реагировать на это сообщение. |
| MAV_CMD_DO_SET_ROI_SYSID | Установите систему гусениц с указанным идентификатором системы. Определение целевой позиции транспортного средства может быть выполнено с помощью GLOBAL_POSITION_INT или любым другим способом. Эту команду можно отправить менеджеру подвеса, но не устройству подвеса. Подвес не должен реагировать на это сообщение. |
| MAV_CMD_DO_SET_ROI_NONE | Отменяет любую предыдущую команду ROI, возвращая транспортное средство / датчики к летным характеристикам по умолчанию.Затем это может использоваться системой управления транспортного средства для управления ориентацией транспортного средства и положением различных датчиков, таких как камеры. Эту команду можно отправить менеджеру подвеса, но не устройству подвеса. Подвес не должен реагировать на это сообщение. После этой команды менеджер подвеса должен вернуться к ручному вводу, если он доступен, или в противном случае принять нейтральное положение. |
| MAV_CMD_DO_GIMBAL_MANAGER_TRACK_POINT | Если менеджер подвеса поддерживает визуальное отслеживание ( GIMBAL_MANAGER_CAP_FLAGS_HAS_TRACKING_POINT установлен), эта команда позволяет инициировать отслеживание.Такой управляющий подвес слежения обычно представляет собой встроенную камеру / стабилизатор или, альтернативно, сопутствующий компьютер, подключенный к камере. |
| MAV_CMD_DO_GIMBAL_MANAGER_TRACK_RECTANGLE | Если стабилизатор поддерживает визуальное отслеживание (установлен GIMBAL_MANAGER_CAP_FLAGS_HAS_TRACKING_RECTANGLE), эта команда позволяет инициировать отслеживание. Такой управляющий подвес слежения обычно представляет собой встроенную камеру / стабилизатор или, альтернативно, сопутствующий компьютер, подключенный к камере. |
Это набор сообщений / перечислений для связи между менеджером подвеса и устройством подвеса.
| Сообщение | Описание |
|---|---|
| GIMBAL_DEVICE_INFORMATION | Информация о низкоуровневом подвесе. Это сообщение должно быть запрошено менеджером подвеса или наземной станцией с использованием MAV_CMD_REQUEST_MESSAGE . |
| GIMBAL_DEVICE_SET_ATTITUDE | Сообщение низкого уровня для управления положением стабилизатора.Это сообщение должно быть отправлено от диспетчера подвеса на компонент устройства подвеса. Углы и скорости могут быть установлены на NaN в соответствии с вариантом использования. |
| GIMBAL_DEVICE_ATTITUDE_STATUS | Сообщение, сообщающее о состоянии подвесного устройства. Это сообщение должно транслироваться компонентом подвесного устройства. |
Ниже показаны последовательности сообщений для некоторых распространенных сценариев.
DiscoveryЗдесь показана возможная последовательность при запуске.Обратите внимание, что менеджер подвеса уже может обнаружить подвес до того, как наземная станция запросит информацию.
Обычное ручное управлениеВо время обычного ручного управления все сообщения передаются с постоянной скоростью. Обратите внимание, что GIMBAL_DEVICE_ATTITUDE_STATUS транслируется кому угодно, например, менеджеру подвеса, а также наземной станции.
Область интереса, инициированная с наземной станцииОбласть интереса может быть запущена с помощью команды и также должна быть остановлена снова с помощью команды.Команда ROI преобразуется в положение подвеса в диспетчере подвеса.
Установка ориентации во время миссииВ этом случае управление подвесом реализуется автопилотом, который «отправляет» команду ориентации (например, для обзора).
Как реализовать интерфейс устройства карданного подвесаНиже приведен краткий обзор всех сообщений, которые должно реализовывать устройство карданного подвеса.
Сообщения для отправкиA Gimbal Device можно проверить, подключив его к автопилоту с помощью Gimbal Manager .Чтобы избежать необходимости выполнять полную настройку, включая автопилот, доступен прямой тест с использованием MAVSDK.
Перечисленные сообщения должны транслироваться по сети / по всем соединениям (отправляться всем).
HEARTBEATHeartbeats следует отправлять всегда (обычно с частотой 1 Гц).
Подвесы, которые устанавливают свой
sysidс автопилота, должны будут дождаться пульса автопилота перед тем, как испускать свои собственные (обратите внимание, что если подвес может получать тактовые импульсы от нескольких автопилотов, то системный идентификатордолжен быть явно / статически настроен) .
-
sysid: тот же sysid, что и автопилот (это можно сделать либо с помощью конфигурации, либо путем прослушивания сначала пульса автопилота, а затем копирования sysid, по умолчанию: 1) -
compid: MAV_COMP_ID_GIMBAL -
Тип: MAV_TYPE_GIMBAL -
автопилота: MAV_AUTOPILOT_INVALID -
base_mode: 0 -
custom_mode: 0 -
system_status:MAV_STATE_UNINIT
карданного устройство должно посылать свое отношение статус по обычной ставке, e.грамм. 10 Гц. Поля target_system и target_component могут быть установлены в 0 (широковещательный) по умолчанию.
Статическая информация об устройстве подвеса должна быть отправлена по запросу с использованием MAV_CMD_REQUEST_MESSAGE.
Сообщения для прослушивания / обработки GIMBAL_DEVICE_SET_ATTITUDEЭто фактическая уставка положения, которой должно следовать подвесное устройство. Обратите внимание, что кадр уставки кватерниона зависит от GIMBAL_DEVICE_FLAGS.
AUTOPILOT_STATE_FOR_GIMBAL_DEVICEПодвес должен иметь возможность получать от автопилота всю информацию, которая требуется в этом сообщении. Если чего-то не хватает, что следует транслировать с высокой скоростью, это следует добавить в это сообщение.
Если это сообщение не отправляется автопилотом по умолчанию или скорость неправильная, можно использовать команду MAV_CMD_SET_MESSAGE_INTERVAL, чтобы запросить его с определенной скоростью.
COMMAND_LONGПодвес необходимо проверить на наличие команд.См. Ниже, на какие команды следует отвечать.
Команды для ответа MAV_CMD_REQUEST_MESSAGEПодвес должен отправлять сообщения, когда они запрашиваются, например GIMBAL_DEVICE_INFORMATION.
MAV_CMD_SET_MESSAGE_INTERVALПодвес должен передавать сообщения с запрошенной скоростью.
Стабилизация изображения: когда использовать и когда выключать
Стабилизация изображения или подавление вибраций, О.I.S., Optical SteadyShot, SR, VC, VR, MEGA O.I.S. и другие столь же запоминающиеся названия — это технологии, которые позволяют фотографам делать снимки в условиях освещения, которые когда-то считались слишком ненадежными для получения четких неподвижных изображений. В зависимости от марки, модели и выпуска вашей камеры или объектива с поддержкой IS, стабилизация изображения позволяет делать резкие снимки при выдержках в три, четыре или пять раз медленнее, чем это было возможно ранее.
Практическое правило для получения четких изображений с рук заключается в том, что вы не должны держать камеру в руках с выдержкой, меньшей, чем эквивалентное фокусное расстояние объектива.Это означает, что объектив 500 мм не следует брать в руки при скоростях менее 1/500 секунды, объектив 300 мм — менее 1/300 секунды, объектив 50 мм — менее 1/50 секунды и объектив 20 мм медленнее 1 /. 20 секунд.
Добавьте стабилизацию изображения в микс, и внезапно вы сможете снимать резкие изображения неподвижных объектов с помощью объектива 500 мм со скоростью до 1/60 секунды, объектива 300 мм со скоростью до 1/30 секунды и объектива 20 мм со скоростью до 1/2 секунды.
Проблема в том, что при первой настройке новой камеры многие стрелки включают стабилизацию изображения камеры или объектива и никогда не оглядываются назад, полагая, что «если мне это нужно, она включена», но в зависимости от конкретной камеры или объектив, это может быть хорошей идеей, а может и не быть.
Прежде чем вдаваться в подробности объекта, важно прояснить распространенное заблуждение о стабилизации изображения, заключающееся в том, что она позволяет «замораживать» быстро движущиеся объекты при более длинной выдержке. Это совершенно неверно. Стабилизация изображения позволяет снимать резкие изображения статичных объектов только на более медленных скоростях. Движущиеся объекты будут одинаково размытыми или полосатыми, а в некоторых случаях более размытыми или более шаткими, при включенной стабилизации изображения.
Стабилизация на основе объектива: камера и система объектива в неподвижном состоянии
Существует два типа стабилизации изображения (IS): на основе объектива и в камере.Стабилизация на основе объектива использует плавающий элемент объектива, который управляется электроникой и смещается в противоположность любому дрожанию камеры, регистрируемому камерой. Системы в камере работают аналогично, но физически смещают датчик изображения, чтобы компенсировать эти движения. Что касается того, какая форма стабилизации изображения лучше, у обеих сторон есть свои плюсы и минусы.
Стабилизация на основе объектива: камера и система объектива дернулись вниз, вызывая дрожание камеры
Преимущества встроенной стабилизации изображения включают более плавную работу при использовании объективов с большим фокусным расстоянием.Обратной стороной стабилизации изображения на основе объектива является то, что она доступна не для всех объективов и увеличивает стоимость объектива. Опять же, если вам не нужна IS, у вас часто есть возможность приобрести версию объектива без IS или, по крайней мере, что-то подобное.
Стабилизация на основе объектива: Коррекция производится группой линз IS
Плюсы стабилизации изображения в камере заключаются в том, что вы получаете преимущества технологии IS с любым объективом, который вы можете установить на камеру, по значительно меньшей цене, чем оптика с несколькими IS.Обратной стороной встроенной стабилизации изображения является то, что она менее эффективно сглаживает неровности при съемке с оптикой с большим фокусным расстоянием по сравнению со стабилизацией изображения на основе объектива.
Стабилизация на основе камеры: система камеры и объектива в неподвижном состоянии
Если вы установите камеру на штатив (или аналогичную устойчивую платформу), не обрезая IS, вы рискуете создать так называемую петлю обратной связи, в которой система IS камеры по существу обнаруживает собственные вибрации и начинает двигаться, даже когда остальная часть камера полностью неподвижна.Это вводит движущиеся объекты в вашу камеру и вносит размытость. Это одна из основных причин отключения стабилизации изображения.
Стабилизация на основе камеры: камера и система объектива дернулись вниз, вызывая дрожание камеры
Многие системы имеют специальные режимы для панорамирования, и их следует использовать при съемке действий и других объектов, требующих постоянного движения из стороны в сторону. Однако некоторые старые объективы и системы начального уровня могут не иметь этой опции или могут не работать должным образом при панорамировании, что приводит к большему размытию.Это тот случай, когда может быть полезно отключить систему стабилизации.
Стабилизация на основе объектива: смещение датчика уменьшает дрожание камеры
Еще одна причина, по которой можно было бы отключить систему стабилизации, — это время автономной работы. IS, контролируемый и измеряемый с помощью электроники, расходует заряд батареи. Это особенно верно для больших линз и больших сенсоров, которые по своей природе требуют больше энергии для перемещения.
В заключение: стоит упомянуть, что для получения самых резких результатов при фотографировании неподвижных объектов ничто не сравнится с камерой, установленной на прочном штативе с выключенной стабилизацией изображения . Это связано с тем, что стабилизация изображения по самой своей природе, использующая движение по одной оси для противодействия движению по противоположной оси, часто сама по себе создает различную степень деградации изображения, в то время как камера жестко прикреплена к устойчивому штативу и срабатывает с помощью кабеля. или дистанционная разблокировка с заблокированным зеркалом в верхнем положении почти в каждом случае позволяет получить более резкое изображение.
Углы рыскания, тангажа, крена и Омега, Фи, Каппа — Поддержка
УглыYaw, Pitch, Roll и Omega, Phi, Kappa определяют ориентацию дрона или камеры во время получения изображения.
Основное различие между двумя наборами углов:
- Углы рыскания, тангажа, крена определяют вращение тела, например, самолета или беспилотного летательного аппарата , относительно его навигационной системы координат. В основном используется производителями дронов. Углы
- Омега, Фи, Каппа определяют поворот между системой координат изображения и системой координат проекции. В основном используется в программном обеспечении для фотограмметрии.
В ЭТОЙ СТАТЬЕ
Определение рысканья, тангажа, крена
Определение Omega, Phi, Kappa
Как преобразовать рыскание, тангаж, крен в Omega, Phi, Kappa
Использование Omega, Phi, Kappa и Yaw, Pitch, Roll angles в Pix4D
Определение рыскания, тангажа, крена
Углы рыскания, тангажа и крена определяют отношение между системой координат навигации и системой координат тела.Системы координат и вращения определены как:
Пример
Предполагая, что камера установлена так, что камера смотрит вниз, а верхняя часть изображения указывает на переднюю часть самолета, углы рыскания, тангажа и крена определяются следующим образом:
Рыскание
- Если рыскание = 0 ° и камера смотрит на землю (то есть в надир), это означает, что верхняя часть изображения указывает на север.
- Если рыскание = 90 ° и камера смотрит на надир, это означает, что верхняя часть изображения направлена на восток.
- Если рыскание = 270 ° и камера смотрит в надир, это означает, что верхняя часть изображения направлена на запад.
Шаг
- Если угол наклона = 0 °, это означает, что камера смотрит вниз (то есть на надир).
- Если угол наклона = 90 °, это означает, что камера смотрит вперед.
Рулон
- При использовании подвеса это значение обычно составляет 0 °.
Еще несколько примеров:
- рыскание = 0 °, тангаж = 0 °, крен = 0 ° означает: камера находится в надире (смотрит вниз перпендикулярно земле), верх изображения указывает на север.
- рыскание = 0 °, тангаж = 90 °, крен = 0 ° означает: камера смотрит вперед от самолета на север.
- рыскание = 90 °, тангаж = 0 °, крен = 0 ° означает: камера находится в надире (смотрит вниз перпендикулярно земле), верх изображения указывает на восток.
Омега, Пхи, Каппа, определение
Углы омега, фи, каппа определяются как углы, используемые для поворота геодезической системы координат (X, Y, Z) и выравнивания ее с системой координат изображения.Повороты применяются в следующем порядке:
- Каппа (κ), вращение вокруг оси Z.
- Phi (φ), вращение вокруг оси Y.
- Омега (ω), вращение вокруг оси Χ
| Вращение вокруг оси Z (Каппа) | Вращение вокруг оси Y (Phi) | Вращение вокруг оси X (Омега) |
| Повороты / углы внешнего ориентирования. | ||
Дополнительную информацию об определении системы координат см. В разделе Как определяются параметры внутренней и внешней камеры? статья.
Примечание: Направление угла определяется правилом правой руки. Положительное вращение означает, что если большой палец правой руки направлен в положительном направлении оси вращения, то пальцы сгибаются в положительном направлении, то есть против часовой стрелки.
Как преобразовать рыскание, тангаж, крен в Omega, Phi, Kappa
Успешное преобразование из рысканья, тангажа и крена в Омегу, Фи и Каппу зависит от нескольких факторов, включая положение камеры на Земле.
Есть много способов преобразовать рыскание, тангаж и крен в Омегу, Фи и Каппу. Метод Pix4D описан в прилагаемых документах:
Использование Omega, Phi, Kappa и Yaw, Pitch, Roll углов в Pix4D
Импорт значений углов в Pix4D
Большинство производителей дронов записывают значения угла рыскания, тангажа и крена непосредственно в тегах EXIF изображений. Если теги EXIF доступны, значения будут автоматически преобразованы в Omega, Phi и Kappa при импорте изображений в продукты Pix4D .Для получения дополнительной информации см. Статью «Спецификации тегов xmp.camera».
Поскольку определение рысканья, тангажа и крена может различаться для разных производителей БПЛА, невозможно гарантировать, что Омега, Фи и Каппа могут быть рассчитаны точно для всех БПЛА.
Если углы ориентации не записаны в EXIF изображений, можно использовать текстовый файл для импорта значений:
- Pix4Dmapper , углы Омега, Фи и Каппа можно импортировать с помощью редактора свойств изображения — Из файла… . Подробнее в статье «Входные файлы».
- Pix4Dmatic , рыскание, наклон и крен можно импортировать с помощью файла — Импорт геолокации и ориентации изображения … . Для получения дополнительной информации см. Статью о формате импорта геолокации и ориентации изображения.
Варианты обработки
На данный момент параметры обработки, которые напрямую влияют на использование углов ориентации, можно выбрать только в Pix4Dmapper.
Точные значения углов могут быть включены для ускорения времени обработки и получения более точных результатов с использованием Точного определения местоположения и ориентации. Метод калибровки : Меню «Процесс»> «Параметры обработки»…> 1. Начальная обработка> Калибровка (Pix4Dmapper).
Для получения дополнительной информации см. FAQ по конвейеру точного геолокации (Pix4Dmapper).
Можно проверить точность начальных значений Omega, Phi и Kappa в соответствии с дисперсией (RMS), которая отображается в отчете о качестве, или сравнить исходную ориентацию с оптимизированной ориентацией, рассчитанной Pix4Dmapper.
Для проверки точности начальных значений Омега, Фи и Каппа примените Стандартный или альтернативный Метод калибровки : Меню «Процесс»> «Параметры обработки»…> 1. Начальная обработка> Калибровка (Pix4Dmapper).
Pix4Dmapper вычисляет оптимизированную ориентацию на этапе 1. Начальная обработка .
Геометрия— углы Эйлера и карданный замок
Допустим, у нас есть объект в трехмерном пространстве, расположенный на P (1,1,1), и если мы решили, что хотим повернуть этот объект в любой из плоскостей XY , XZ , YZ вдоль любой 3 оси, где это базовая трехмерная декартова система в правой системе, матрицы вращения $ R_n $ для P будут выглядеть следующим образом:
$$ R_x \ space || \ пробел R_y \ пробел || \ пробел R_z $$
$$ R_x (\ theta) P = \ begin {bmatrix} 1 & 0 & 0 \\ 0 & \ cos \ theta & — \ sin \ theta \\ 0 & \ sin \ theta & \ space \ space \ cos \ theta \\ \ end {bmatrix} \ begin {bmatrix} P_x \\ P_y \\ P_z \\ \ end {bmatrix}, $$
$$ R_y (\ theta) P = \ begin {bmatrix} \ пробел \ соз \ тета & 0 & \ грех \ тета \\ 0 & 1 & 0 \\ — \ sin \ theta & 0 & \ cos \ theta \\ \ end {bmatrix} \ begin {bmatrix} P_x \\ P_y \\ P_z \\ \ end {bmatrix}, $$
$$ R_z (\ theta) P = \ begin {bmatrix} \ cos \ theta & — \ sin \ theta & 0 \\ \ sin \ theta & \ space \ space \ cos \ theta & 0 \\ 0 & 0 & 1 \\ \ end {bmatrix} \ begin {bmatrix} P_x \\ P_y \\ P_z \\ \ end {bmatrix} $$
При выполнении вращений в 3D между любой из произвольных осей, порядок вращений, управляемость системы, направление вращений и выполнение вращений между несколькими осями имеют значение.Чтобы продемонстрировать это, скажем, угол $ \ theta = 90 ° $, и мы применяем это вращение последовательно в нескольких измерениях, вы увидите, что в конечном итоге мы получим Gimbal Lock. Сначала сделаем $ R_x $ на 90 °, затем $ R_y $ и, наконец, попробуем $ R_z $
.Здесь мы собираемся применить поворот на 90 ° к точке или вектору P (1,1,1) на оси $ R_x $
$ R_x (90 °) $ $ \ begin {bmatrix} 1 \\ 1 \\ 1 \\ \ end {bmatrix} $ = $ \ begin {bmatrix} 1 & 0 & 0 \\ 0 & \ cos 90 ° & — \ sin 90 ° \\ 0 & \ sin 90 ° & \ пробел \ пробел \ cos 90 ° \\ \ end {bmatrix} $ $ \ begin {bmatrix} 1 \\ 1 \\ 1 \\ \ end {bmatrix} $ = $ \ begin {bmatrix} 1 & 0 & \ пробел \ пробел 0 \\ 0 & 0 & -1 \\ 0 & 1 & \ пробел \ пробел 0 \\ \ end {bmatrix} $ $ \ begin {bmatrix} 1 \\ 1 \\ 1 \\ \ end {bmatrix} $ = $ \ begin {bmatrix} 1 \\ -1 \\ 1 \\ \ end {bmatrix}
долл. СШАТеперь, когда наш вектор P был преобразован, мы применим еще один поворот на 90 °, но на этот раз к оси $ R_y $ с новыми значениями.
$ R_y (90 °) $ $ \ begin {bmatrix} 1 \\ -1 \\ 1 \\ \ end {bmatrix} $ = $ \ begin {bmatrix} \ cos 90 ° & 0 & \ sin 90 ° \\ 0 & 1 & 0 \\ — \ sin 90 ° & 0 & \ cos 90 ° \\ \ end {bmatrix} $ $ \ begin {bmatrix} 1 \\ -1 \\ 1 \\ \ end {bmatrix} $ = $ \ begin {bmatrix} 0 & 0 & 1 \\ 0 & 1 & 0 \\ -1 & 0 & 0 \\ \ end {bmatrix} $ $ \ begin {bmatrix} 1 \\ -1 \\ 1 \\ \ end {bmatrix} $ = $ \ begin {bmatrix} 1 \\ -1 \\ -1 \\ \ end {bmatrix}
долл. СШАТеперь мы можем закончить с $ R_z $
$ R_z (90 °) $ $ \ begin {bmatrix} 1 \\ -1 \\ -1 \\ \ end {bmatrix} $ = $ \ begin {bmatrix} \ cos 90 ° & — \ sin 90 ° & 0 \\ \ sin 90 ° & \ cos 90 ° & 0 \\ 0 & 0 & 1 \\ \ end {bmatrix} $ $ \ begin {bmatrix} 1 \\ -1 \\ -1 \\ \ end {bmatrix} $ = $ \ begin {bmatrix} 0 & -1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1 \\ \ end {bmatrix} $ $ \ begin {bmatrix} 1 \\ -1 \\ -1 \\ \ end {bmatrix} $ = $ \ begin {bmatrix} 1 \\ 1 \\ -1 \\ \ end {bmatrix}
долл. СШАИ, как вы можете видеть в расчетах матриц, каждый раз, когда мы поворачивались на 90 градусов, менялось направление.Здесь мы потеряли степень свободы вращения. Это означает, что мы повернули компоненты X на 90 °, что оказывается перпендикулярно или ортогонально осям Y и Z, что очевидно из того факта, что $ \ cos (90 °) = 0 $ . Затем, когда мы снова вращаемся на 90 ° вдоль оси Y, и снова ось Y перпендикулярна обеим осям X и Z, теперь у нас есть 2 оси вращения, которые выровнены, поэтому, когда мы пытаемся повернуть в 3-м измерении пространства, мы потеряли степень свободы, потому что мы больше не можем различать X и Y, поскольку они оба будут вращаться одновременно, и нет способа их разделить.Это видно из расчетов, которые были выполнены с помощью матриц. Возможно, сейчас это не совсем очевидно, но если вы проделаете все 6 перестановок в порядке вращения осей, вы увидите, как возникает закономерность. Такие повороты называются углами Эйлера.
Также не имеет значения, с какой комбинацией осей вы вращаете, потому что это будет происходить с каждой комбинацией, когда две оси вращения станут параллельны.
$$ R_x (90 °) P \ to R_y (90 °) P \ to R_z (90 °) P \ подразумевает Gimbal Lock $$ $$ R_x (90 °) P \ to R_z (90 °) P \ to R_y (90 °) P \ подразумевает Gimbal Lock $$ $$ R_y (90 °) P \ to R_x (90 °) P \ to R_z (90 °) P \ подразумевает Gimbal Lock $$ $$ R_y (90 °) P \ to R_z (90 °) P \ to R_x (90 °) P \ подразумевает Gimbal Lock $$ $$ R_z (90 °) P \ to R_x (90 °) P \ to R_y (90 °) P \ подразумевает Gimbal Lock $$ $$ R_z (90 °) P \ to R_y (90 °) P \ to R_x (90 °) P \ подразумевает Gimbal Lock $$
Если я упрощу это, показывая все 6 комбинаций с конечными векторами преобразования или матрицами для той же точки, вы должны увидеть шаблон, и эти преобразования следующие:
$$ R_x (90 °) P (1,1,1) \ to \ begin {bmatrix} 1 \\ -1 \\ 1 \\ \ end {bmatrix} R_y (90 °) \ до \ begin {bmatrix} 1 \\ -1 \\ -1 \\ \ end {bmatrix} R_z (90 °) \ к \ begin {bmatrix} 1 \\ 1 \\ -1 \\ \ end {bmatrix} $$
$$ R_x (90 °) P (1,1,1) \ to \ begin {bmatrix} 1 \\ -1 \\ 1 \\ \ end {bmatrix} R_z (90 °) \ к \ begin {bmatrix} 1 \\ 1 \\ 1 \\ \ end {bmatrix} R_y (90 °) \ до \ begin {bmatrix} 1 \\ 1 \\ -1 \\ \ end {bmatrix} $$
$$ R_y (90 °) P (1,1,1) \ to \ begin {bmatrix} 1 \\ 1 \\ -1 \\ \ end {bmatrix} R_x (90 °) \ к \ begin {bmatrix} 1 \\ 1 \\ 1 \\ \ end {bmatrix} R_z (90 °) \ к \ begin {bmatrix} -1 \\ 1 \\ 1 \\ \ end {bmatrix} $$
$$ R_y (90 °) P (1,1,1) \ to \ begin {bmatrix} 1 \\ 1 \\ -1 \\ \ end {bmatrix} R_z (90 °) \ к \ begin {bmatrix} -1 \\ 1 \\ -1 \\ \ end {bmatrix} R_x (90 °) \ к \ begin {bmatrix} -1 \\ 1 \\ 1 \\ \ end {bmatrix} $$
$$ R_z (90 °) P (1,1,1) \ to \ begin {bmatrix} -1 \\ 1 \\ 1 \\ \ end {bmatrix} R_x (90 °) \ к \ begin {bmatrix} -1 \\ -1 \\ 1 \\ \ end {bmatrix} R_y (90 °) \ до \ begin {bmatrix} 1 \\ -1 \\ 1 \\ \ end {bmatrix} $$
$$ R_z (90 °) P (1,1,1) \ к \ begin {bmatrix} -1 \\ 1 \\ 1 \\ \ end {bmatrix} R_y (90 °) \ до \ begin {bmatrix} 1 \\ 1 \\ 1 \\ \ end {bmatrix} R_x (90 °) \ к \ begin {bmatrix} 1 \\ -1 \\ 1 \\ \ end {bmatrix} $$
Если вы посмотрите на комбинации оси, с которой вы начали, не имеет значения, в каком порядке две вы закончили, потому что результат будет таким же для этой начальной оси вращения.Таким образом, интуитивно мы можем сказать это об использовании углов вращения Эйлера в 3D, учитывая при этом хиральность системы координат; рука имеет значение, потому что она изменит матрицы вращения вместе с функциями триггера, и их знаки будут другими, как и ваши результаты. Теперь, что касается этой конкретной системы координат, мы можем визуально сделать вывод об углах Эйлера:
$$ R_x (\ theta) P \ подразумевает \ begin {bmatrix} a \\ a \\ -a \\ \ end {bmatrix} $$
$$ R_y (\ theta) P \ подразумевает \ begin {bmatrix} -a \\ a \\ a \\ \ end {bmatrix} $$
$$ R_z (\ theta) P \ подразумевает \ begin {bmatrix} a \\ -a \\ a \\ \ end {bmatrix} $$
По цифрам может показаться не совсем очевидным, что именно вызывает блокировку кардана, но результаты преобразований должны дать вам некоторое представление о том, что происходит.Это может быть проще визуализировать, чем просто глядя на математику. Поэтому я дал ссылку на хорошее видео ниже. Теперь, если вас интересуют доказательства, у вас впереди много работы, потому что есть и другие факторы, которые вызывают это, например, отношения $ \ cos (\ theta) $ между двумя векторами, равными точке произведение этих векторов, разделенное на их величины.
$$ \ cos (\ theta) = \ frac {V_1 \ cdot V_2} {\ lvert V_1 \ rvert \ lvert V_2 \ rvert} $$
Другие способствующие факторы — это правила исчисления тригонометрических функций, особенно функций $ \ sin $ и $ \ cos $.
$$ (\ sin {x}) ‘= \ cos {x} $$
$$ (\ cos {x}) ‘= — \ sin {x} $$
$$ \ int \ sin {ax} \ space dx = — \ frac {1} {a} \ cos {ax} + C $$
$$ \ int \ cos {ax} \ space dx = \ frac {1} {a} \ sin {ax} + C $$
Еще один интересный факт, который, я думаю, может привести к рассуждениям о Gimbal Lock, довольно интересен, но это тема для другого дня, так как это само по себе заслуживает отдельной страницы, но простите меня, если математическое форматирование не идеально. Я новичок в этом конкретном сайте обмена стеками, и по ходу изучаю математические теги и форматирование.
Вот отличное видео, иллюстрирующее Gimbal Lock: Youtube: Gimbal Lock
Достойный перфоратор по цене
Если вы считаете, что ваша оптически стабилизированная камера смартфона достаточно хороша, чтобы помочь вам записывать видео профессионального (или даже полупрофессионального) уровня, вы можете попробовать 3-осевой стабилизатор карданного подвеса (или просто карданный подвес). Подвес — это устройство, которое выглядит как высокотехнологичное устройство, но выполняет важную функцию — устраняет рывки и тряски. Он работает по тем же принципам, что и гироскоп.Он стабилизирует наклон, панорамирование и крен камеры. Поэтому, если вы двигаетесь из стороны в сторону, вверх и вниз, вперед и назад, стабилизатор стабилизирует видео, даже если вы дрожите.
Кроме того, вы даже получаете миниатюрный джойстик для перемещения по камере благодаря двигателям, присутствующим внутри устройства.
Я сам занимаюсь созданием видео, поэтому мне нравится носить с собой стабилизатор для смартфона. Это помогает мне делать действительно плавные снимки, особенно когда мне нужно панорамировать или наклонять.
3-осевой стабилизатор подвеса смартфона Digitek — одно из таких устройств. По цене 10 995 фунтов стерлингов, это не совсем дешево. Но стоит ли это денег? Давай выясним.
Дизайн и качество сборки
Трехосевой стабилизатор Digitek построен как танк. Благодаря сочетанию металла и пластика он надежно фиксируется в руке. Резиновая рукоятка имеет текстуру, напоминающую кожу, и имеет форму, позволяющую плотно прилегать к ладони.Он тяжелый, как и большинство других стабилизаторов, но распределение веса таково, что не напрягает руки после длительного использования. Кнопки и джойстики на передней панели находятся в пределах досягаемости, хотя спусковая кнопка сзади требует небольшого натяжения.
Однако держатель для смартфона сделан очень хорошо. Неоднократно злоупотребляя им, довольно удивительно, как его пружины держатся.
Просмотреть полное изображение
Джойстик и другие элементы управления 3-осевого стабилизатора подвеса смартфона DigitekЕдинственным серьезным недостатком является регулировочный рычаг, который стабилизирует ось крена смартфона.Требуется много проб и ошибок, чтобы завинтить его в положение, при котором стабилизатор не будет направлен в сторону веса смартфона. Эта проблема возникает только со смартфонами, которые не являются iPhone, так как они созданы специально для iPhone 8.
Что касается аксессуаров, с которыми он поставляется, он поставляется с зарядным кабелем Micro-USB, браслетом, мини-подставкой для штатива и жестким футляром для переноски всего этого.
Производительность
Начать работу намного проще, чем я ожидал.Во-первых, вам необходимо загрузить приложение «Gimbal Pro» из Play Store. Затем вам необходимо включить стабилизатор, удерживая кнопку записи (красную). Мигающий синий свет означает, что вы на правильном пути. Следующие шаги просты, поскольку приложение указывает вам, что делать, чтобы подключить стабилизатор к вашему смартфону через Bluetooth.
После того, как вы разберетесь с этим, вы можете открыть настраиваемое приложение камеры, которое позволяет вам использовать элементы управления, присутствующие на подвесе. Это означает, что вам не нужно прикасаться к экрану для записи видео или щелкать фото.Вам нужно будет прикоснуться к дисплею, чтобы зафиксировать экспозицию и фокусировку, а также выбрать различные режимы. К ним относятся панорама, видео, фото, гиперлапс и панорамный гиперлапс.
Функции работают как рекламируется, честно говоря, немного лучше. Однако элементы управления можно улучшить. Чувствительность джойстика по-прежнему очень высока, даже если в настройках повернуть его до упора. К счастью, джойстик поддерживает аналоговые функции, поэтому вы можете делать несколько медленных панорамных снимков, слегка перемещая его в выбранном вами направлении.Это требует немного усилий, чтобы полностью его освоить.
Что касается стабилизации, почти все мои ходячие снимки получились приемлемыми. Они кажутся гладкими, но не слишком натянутыми. Возможность заблокировать одну ось вращения также очень удобна в ситуациях, когда вы много перемещаетесь.
Установив его на прилагаемый мини-штатив, стабилизатор может снимать действительно хорошие панорамные гиперлапсы. Вам просто нужно убедиться, что стабилизатор не наклоняется в сторону, иначе есть вероятность, что он упадет.
У него есть несколько недостатков, которых следует опасаться. Это пугает, когда вы пытаетесь использовать его под очень крутыми углами, то есть когда угол между ручкой и смартфоном составляет менее 135 градусов. Так что если вы планируете сделать несколько снимков крошечных предметов, например смартфонов, крупным планом, вам не повезло.
Во-вторых, некоторые смартфоны наклоняются даже после регулировки оси крена — физически и через приложение. Я не сталкивался с этой проблемой с iPhone 8, но современные смартфоны Android, включая Google Pixel 3 XL, OnePlus 6 и Samsung Galaxy Note 9, были немного болезненными в использовании.Были времена, когда подвес полностью выходил из-под контроля, особенно с Galaxy Note 9. Это в основном связано с распределением веса этих смартфонов.
Приговор
Трехосевой стабилизатор подвеса смартфона Digitek — отличное устройство для людей, серьезно относящихся к мобильной видеосъемке. С его помощью вы можете получить действительно красивые снимки без рывков и толчков. Конечно, он не подходит для всех смартфонов, но если у вас есть iPhone, вы не ошибетесь.
Подпишитесь на информационный бюллетень Mint
* Введите действующий адрес электронной почты
* Спасибо за подписку на нашу рассылку.
Не пропустите ни одной истории! Оставайтесь на связи и в курсе с Mint. Скачать наше приложение сейчас !!
Управление юридическим проектом определено — GIMBAL Canada
Несмотря на повсеместное распространение этого термина, многие юристы до сих пор не имеют или имеют ограниченное представление об управлении юридическими проектами (LPM).Поэтому неудивительно, что внедрение LPM в профессии до сих пор лучше устраивало маркетинговые группы, чем группы практиков.
Короче говоря, LPM — это применение и адаптация профессиональных инструментов / методов управления проектами для решения вопросов в юридической практике. Так что это значит?
Вопросы есть проекты и проекты нуждаются в управлении
Каждый юридический вопрос — это проект, в том смысле, что это «временное усилие, предпринимаемое для создания уникального продукта или услуги».[1] Как проект, нужно управлять каждым вопросом. За последние 60 с лишним лет, помимо закона, управление проектами существовало как формальная и развивающаяся профессия, дополненная профессиональной организацией (Институт управления проектами), профессиональными обозначениями и совокупностью профессиональных знаний (PMI PMBOK).
Десять компонентов (юридического) управления проектами
Управление проектом состоит из набора инструментов / методов для управления 10 аспектами проекта (объем, стоимость, время, качество, закупки, человеческие ресурсы, коммуникации, риски, заинтересованные стороны и интеграция) в течение 4 временных фаз (начало, Планирование, исполнение / контроль и закрытие).
1. Управление объемом : определение работы, которую необходимо выполнить; сохранение проекта в объеме; и управление изменениями объема работ, если они возникнут в ходе проекта. Неудача в управлении областью действия ведет к ужасному «расползанию области действия» — на сленге PM для неуправляемого изменения области действия.
2. Управление затратами : определение бюджета / цены на работы, которые должны быть выполнены; управление финансовыми вопросами в ходе проекта для обеспечения его выполнения в рамках бюджета; управление изменениями бюджета при необходимости.
Стоит отметить, что, хотя вне закона ценообразование является компонентом управления проектом, в рамках закона, похоже, существует тенденция определять его как отдельную роль. В этом подходе нет ничего плохого, пока понимается и поддерживается тесная взаимосвязь между ценообразованием и управлением проектами. Если фирма применяет альтернативное ценообразование с тарифами без надежного LPM, она подвергает себя значительному и ненужному риску финансовых потерь.
3. Управление временем: установка графика предоставления услуг; отслеживание прогресса в ходе рассмотрения дела и принятие мер, чтобы вернуть его в нужное русло, если оно отстает; и при необходимости управлять изменениями в графике.
4. Управление качеством : установление эталона качества; обеспечение соответствия всех аспектов работы стандарту; а также выявление причин недостатков качества и принятие мер, чтобы они не повторялись в будущем.
5. Управление закупками : управление любыми сторонними продуктами или услугами, которые необходимы для успеха вашего дела. Традиционно более актуальный для внутреннего юриста, он становится все более важным компонентом частной практики, поскольку фирмы стремятся передать определенные аспекты вопросов на аутсорсинг поставщикам услуг с более низкими затратами.
6. Управление персоналом : Привлечение нужных людей в ваши юридические группы и службы поддержки, у которых есть время для выполнения работы; защита их от других юристов, которые могут попытаться украсть у вас их время; поддержание мира, согласия и морального духа в ваших командах; обеспечение того, чтобы члены команды обладали навыками / обучением для оказания услуг; и управление изменениями кадровых требований по мере необходимости.
7. Управление коммуникациями : управление потоком информации как внутри команды, так и с вашим клиентом; установление и поддержание пунктов связи; обеспечение того, чтобы ваша фирма единогласно высказывалась по этому поводу; выявление и устранение сбоев связи; обеспечение использования правильных методов (телефон, электронная почта, онлайн, письмо) общения по каждому вопросу.
8. Управление рисками : определение рисков для успеха дела; принятие таких мер, которые доступны для снижения этих рисков; мониторинг увеличения / уменьшения выявленных рисков и развития новых рисков; и, что, возможно, наиболее важно, информировать вашего клиента о статусе рисков по мере развития дела.
9. Управление заинтересованными сторонами : определение заинтересованных сторон и их интересов в проекте; управление этими интересами, которые иногда могут вступать в конфликт по мере развития дела.
10. Управление интеграцией: Клей, на котором скреплены остальные девять компонентов, это также можно назвать общим управлением проектом. Во время планирования и выполнения он обеспечивает синхронизацию других компонентов. Например, изменение объема может повлиять на бюджет, сроки, требования к персоналу и т. Д. Управление интеграцией описывает работу, которую вы выполняете для управления этими различными перекрестными воздействиями.
Четыре этапа (юридического) управления проектом
На самом деле нет четкого правила о том, сколько фаз должен иметь ваш проект или где провести границы между фазами, но я использую четыре в качестве ориентира.В основном они работают так:
- Этап инициации: будем ли мы делать проект? Есть ли у нас навыки, необходимые для успеха?
- Этап планирования: как мы собираемся реализовать проект? Как много времени это займет? Сколько это будет стоить?
- Этап выполнения / контроля: выполнение проекта, крепкая рука на румпеле, чтобы убедиться, что он идет правильно, и принятие быстрых корректирующих действий, если что-то пойдет не так.
- Заключительный этап: завершение работы, когда работа сделана.Обзор после выполнения с вашей командой и / или вашим клиентом — полезное упражнение в рамках этого этапа, которое позволяет вам зафиксировать и закрепить извлеченные уроки в базе знаний вашей фирмы, чтобы гарантировать, что инновации повторяются, а ошибки не повторяются.
Кто это делает?
Некоторые вопросы по своей природе требуют, чтобы конкретное лицо взяло на себя роль менеджера юридического проекта по данному вопросу. Однако для большинства эту роль берет на себя юрист в коляске. Также хорошей идеей является обеспечение того, чтобы каждый в команде имел хотя бы базовое представление о концепциях LPM.
Что такое LPM, а что нет?
Первый , это не ракетостроение. Это в значительной степени выражено здравым смыслом, хотя, как и в большинстве случаев, для одних оно дается более естественно, чем для других.
Второй , это набор инструментов, а не Библия. Применение инструментов к конкретным вопросам будет зависеть от характера вопроса. Ваша общая цель — предоставить свои услуги в срок и в рамках бюджета довольному клиенту от здоровой проектной команды. Если конкретный инструмент LPM не способствует достижению этих целей для конкретного проекта, не используйте его!
Третий , это не еще один слой административной волокиты, мешающий вам выполнять вашу настоящую работу.Прямо сейчас вы либо каким-то образом управляете всеми вопросами, которыми вы сейчас занимаетесь, либо у вас более высокий риск предъявления исков о злоупотреблениях служебным положением (66% жалоб о злоупотреблениях служебным положением связаны с ошибками в управлении юридическими проектами). Инструменты в вашем наборе инструментов LPM сделают управление делами ваших клиентов проще и эффективнее. В конце концов, хотя гвоздь можно забить камнем, гораздо проще, быстрее и точнее забить его молотком.
Четвертый , это не обязательно! Аргумент, что LPM применим только к более крупным и сложным вопросам, просто неверен.Каждый вопрос — это проект, и каждый проект требует определенной меры управления. Подход на основе набора инструментов к LPM позволяет варьировать объем усилий и инструментов LPM в зависимости от сложности вопроса. Для небольшого, простого вопроса этапы инициирования и планирования могут быть обработаны с помощью телефонного звонка и простого электронного письма вашему клиенту, в котором кратко излагается работа, которую необходимо сделать, и бюджет. Более крупные и сложные вопросы могут потребовать более формального структурированного процесса для прохождения первых двух этапов. Ключевым моментом является то, что в обеих ситуациях объем работ и цена оговариваются до того, как работа будет выполнена.И это начало хорошего управления юридическими проектами.
Сводка
Применение инструментов / методов LPM на протяжении всего жизненного цикла всех ваших дел сокращает общее количество не оплачиваемых и не оплачиваемых часов, которые вы посвящаете своей практике каждый год, и это хорошо для вашей прибыли. А применение инструментов / методов LPM на протяжении всей жизни во всех ваших делах повышает ценность вашего обслуживания клиентов, что хорошо для вашей прибыли, здоровья вашей практики и прочности ваших отношений с клиентами.
Не уверены, что ваша фирма применяет хороший LPM? Попробуйте этот надежный одноэтапный тест.
— Артур Уилсон
[1] https://www.pmi.org/about/learn-about-pmi/what-is-project-management
Эта статья изначально была опубликована на странице Art’s Linked In.
Твитнуть