


основные характеристики и режимы работы
 В энергетической сфере деятельности используются первичные источники высокого переменного напряжения, однако в быту или на предприятиях необходимо значительно его снизить. Для этой цели применяются трансформаторы. Для полного понимания и грамотного применения напряжения в быту необходимо знать принцип действия однофазного трансформатора.
В энергетической сфере деятельности используются первичные источники высокого переменного напряжения, однако в быту или на предприятиях необходимо значительно его снизить. Для этой цели применяются трансформаторы. Для полного понимания и грамотного применения напряжения в быту необходимо знать принцип действия однофазного трансформатора.
Общие сведения о трансформаторах
Значительно легче передавать переменный ток на большие расстояния, так как достигаются минимальные потери, связанные с величинами напряжения (U) и тока (I). Кроме того, для передачи не переменного, а постоянного I необходимо применять сложную электронику, которая основана на усилении параметров электричества. Основной частью этой технологии являются мощные транзисторы, которые требуют специального охлаждения, и главным критерием является цена. Использование трансформаторов, которые работают только от переменной величины тока, является оптимальным решением.
Назначение и устройство
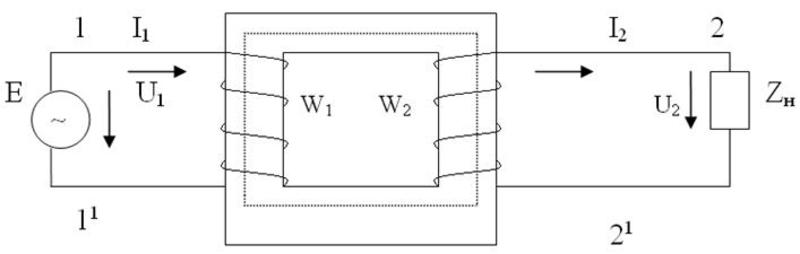
Трансформатор (Т) — это специализированное электрическое устройство, которое работает только от переменного I и используется для преобразования значений входного U и I в необходимые значения этих величин, предусмотренных потребителем.
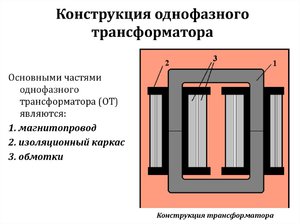
Т является довольно примитивным устройством, однако в его конструкции есть некоторые особенности. Для понимания принципа действия однофазного трансформатора следует изучить его назначение и устройство. Устроен однофазный трансформатор следующим образом — он состоит из магнитопровода и обмоток.
Магнитопровод, или сердечник трансформатора, выполнен из ферромагнитного материала.
Ферромагнетики — это вещества, обладающие самопроизвольной намагниченностью. Это обусловлено тем, что атомы вещества обладают очень важными свойствами: постоянные спиновые и орбитальные моменты. Свойства ферромагнетиков зависят от температуры и действия магнитного поля. Для изготовления магнитопровода Т используются такие материалы: электротехническая сталь или пермаллой.
Электротехническая сталь содержит в своем составе большую массовую долю кремния (Si), которая под действием высокой температуры соединяется с атомами углерода ©. Этот тип используется во всех типах Т, независимо от мощности.
Пермаллой является сплавом, состоящим из никеля (Ni) и железа (Fe), и применяется только в маломощных трансформаторах.
Тип Т представляет собой катушки, состоящие из каркаса и провода, покрытого изоляционным материалом. Этот провод намотан на основание катушек, и количество витков зависит от параметров Т. Количество катушек может быть 2 и более, оно зависит от конструктивной особенности электрического устройства и определяется сферой применения.
Принцип действия
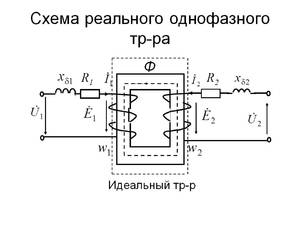
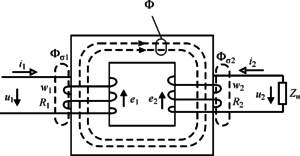
Принцип работы однофазного трансформатора довольно простой и основан на генерации электродвижущей силы (ЭДС) в обмотках проводника, который находится в движущемся магнитном поле и сгенерирован при помощи переменного I. При прохождении электричества по обмоткам первичной катушки создается магнитный поток (Ф), который пронизывает и вторичную катушку. Силовые линии Ф благодаря замкнутой конструкции магнитопровода имеют замкнутую структуру. Для получения оптимальной мощности Т необходимо располагать катушки обмоток на близком расстоянии относительно друг друга.
 Исходя из закона электромагнитной индукции происходит изменение Ф и индуцируется в первичной обмотке ЭДС. Эта величина называется ЭДС самоиндукции, а во вторичной — ЭДС взаимоиндукции.
Исходя из закона электромагнитной индукции происходит изменение Ф и индуцируется в первичной обмотке ЭДС. Эта величина называется ЭДС самоиндукции, а во вторичной — ЭДС взаимоиндукции.При подключении потребителя к первичной обмотке Т в цепи появится электрическая энергия, которая передается из первичной обмотки через магнитопровод (катушки не связаны гальванически). В этом случае средством передачи электроэнергии служит только Ф. Трансформаторы по конструктивной особенности бывают различные. По достижению максимальной магнитной связи (МС) Т делятся на следующие типы:
- Средняя.
- Слабая.
При слабой МС происходит значительная потеря энергии и Т такого типа практически не применяются. Основной особенностью таких Т являются незамкнутые сердечники.
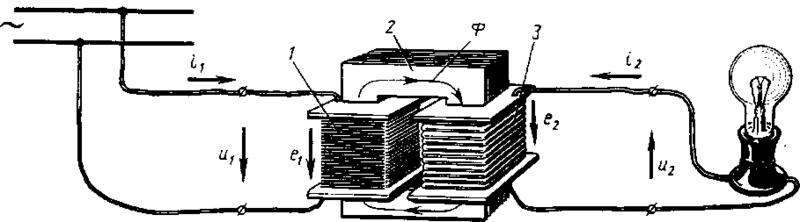
Уровень средней МС достигается только при полностью замкнутом магнитопроводе. Одним из примеров такого Т является стержневой тип, у которого обмотки расположены на железных стержнях и соединены между собой накладками или ярмами. В результате такой конструкции получается полностью замкнутый сердечник.
Примером сильной МС является Т броневого типа, обмотки которого располагаются на одной или нескольких катушках. Эти обмотки расположены очень близко, благодаря чему и обеспечивается минимальная потеря электрической энергии. Магнитопровод полностью покрывает катушки, создавая более сильный Ф, который разбивается на 2 части. У трансформаторов такого типа потоки сцепления между обмотками практически равны.
Режимы работы
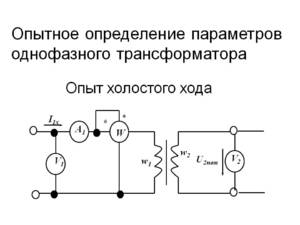
Т, как и любой вторичный источник питания, имеет определенные режимы работы. Режимы отличаются потреблением I. Существует 2 режима: холостого хода и нагрузки. При холостом ходе Т потребляет минимальное количество I, которое используется только на намагничивание и потери в обмотках на нагревание. Кроме того, происходит рассеивание магнитного поля. Ф создается I магнитодвижущей силы, которую генерирует первичная обмотка. В этом случае I холостого хода составляет 3−10% от номинального показателя (Iн).
 При нагрузке во II обмотке появляется I, а значит — и магнитодвижущая сила (МДС). По закону Ленца: МДС II обмотки действует против МДС первичной обмотки. При этом ЭДС в первичной обмотке во время нагрузки Т равна U и прямо пропорциональна Ф. В этом случае получение k можно записать в виде: I1 / I2 = w2/w1 = 1/k.
При нагрузке во II обмотке появляется I, а значит — и магнитодвижущая сила (МДС). По закону Ленца: МДС II обмотки действует против МДС первичной обмотки. При этом ЭДС в первичной обмотке во время нагрузки Т равна U и прямо пропорциональна Ф. В этом случае получение k можно записать в виде: I1 / I2 = w2/w1 = 1/k.
Исходя из формул для расчета k, можно получить еще одно соотношение Т: e1 * I1 = e2 * I2 = 1.
Это соотношение показывает, что мощность, потребляемая первичной обмоткой, равна мощности, которую потребляет II обмотка при нагрузке. Мощность Т измеряется в вольт-амперах (ВА).
Основные параметры
Кроме того, следует отметить, что любой Т обладает некоторыми параметрами, которые и отличаются от других трансформаторов. К тому же, если понимать эти зависимости, то можно рассчитать и изготовить Т своими руками.
Связь между ЭДС, возникающей в обмотках Т, зависит от количества витков каждой из них. Исходя из того, что I и II обмотки пронизываются одним и тем же Ф,
 Для первичной с количеством витков w1: e1 = — w1 * dФ/dt * E-8.
Для первичной с количеством витков w1: e1 = — w1 * dФ/dt * E-8.- Для вторичной с количеством витков w2: e2 = — w2 * dФ/dt * E-8.
 Для первичной с количеством витков w1: e1 = — w1 * dФ/dt * E-8.
Для первичной с количеством витков w1: e1 = — w1 * dФ/dt * E-8.Соотношение dФ/dt показывает величину изменения Ф за единицу времени. Значение потока Ф зависит от закона изменения переменного тока за единицу времени. Исходя из этих выражений получается следующая формула соотношения числа витков к ЭДС каждой обмотки:
e1/e2 = w1/w2.
Следовательно, можно сделать следующий вывод: индуцируемые в обмотках значения ЭДС также относятся к друг другу, как и число витков обмоток. Для более простой записи можно сопоставить значения e и U: e = U. Из этого следует, что e1 = U1 e2 = U2 и возможно получить еще одну величину, называемую коэффициентом трансформации (к): e1/e2 = U1/U2 = w1 / w2 = k. По коэффициенту трансформации Т делятся на понижающие и повышающие.
Понижающим является Т, k которого меньше 1, и, соответственно, если к > 1, то он является повышающим. При отсутствии потерь в проводах обмоток и рассеивания Ф (они незначительны и ими можно пренебречь) вычислить основной параметр Т (k) достаточно просто. Для этого необходимо воспользоваться следующим простым алгоритмом нахождения k: найти соотношения U обмоток (если обмоток более 2, то соотношение нужно искать для всех обмоток).
Однако расчет k является только первым шагом для дальнейшего расчета или выявления неисправности на наличие короткозамкнутых витков.
Чтобы определить значения U, необходимо использовать 2 вольтметра, точность которых составляет около 0,2−0,5. Кроме того, для определения k существуют такие способы:
- По паспорту.
- Практически.
- Использование определенного моста (мост Шеринга).
- Прибором, предназначенным для этой цели (УИКТ).
Таким образом, принцип работы однофазного трансформатора основан на простом законе физики, а именно: если проводник с n количеством витков поместить в магнитное поле, причем это поле должно постоянно меняться с течением времени, то в витках будет генерироваться ЭДС. В этом случае справедливо и обратное утверждение: если в постоянное магнитное поле поместить проводник и осуществлять им движения, то в его обмотках начинает появляться ЭДС.
Карданная передача. Назначение и принцип действия
Карданная передача служит для передачи вращающего момента между агрегатами, оси валов которых не лежат на одной прямой и могут изменять свое взаимное положение.
У полноприводных колесных машин карданная передача обычно соединяет ведомый вал КП с ведущим валом раздаточной коробки, а ведомые валы раздаточной коробки — с ведущими валами главных передач ведущих мостов. Агрегаты, закрепленные на раме (в частности, КП и раздаточная коробка), могут перемещаться относительно друг друга в результате деформации своих опор и самой рамы, а ведущие мосты присоединены к раме через подвеску, поэтому могут перемещаться относительно рамы и закрепленных на ней агрегатов при деформации упругих элементов подвески. При этом могут изменяться не только углы наклона карданных валов, соединяющих агрегаты, но и расстояние между агрегатами.

Рис. Схема карданной передачи:
1, 4, 6 — карданные валы; 2, 5 — карданные шарниры; 3 — компенсирующее соединение; у1, у2 — углы между валами
В общем случае карданная передача состоит из карданных шарниров 2 и 5, карданных валов 1,4 и 6 и компенсирующего соединения 3. Иногда карданный вал устанавливают на промежуточной опоре, прикрепленной к поперечине рамы ТС.
Карданные шарниры обеспечивают передачу вращающего момента между валами, оси которых пересекаются под углом. Различают карданные шарниры неравных и равных угловых скоростей. Карданные шарниры неравных угловых скоростей подразделяют на упругие и жесткие. Карданные шарниры равных угловых скоростей по конструкции бывают шариковые с делительными канавками, шариковые с делительным рычажком и кулачковые. Обычно их устанавливают в приводе ведущих управляемых колес, где угол между валами может достигать 45°, причём центр карданного шарнира должен совпадать с точкой пересечения осей вращения колеса и его поворота.
Упругие карданные шарниры передают вращающий момент между валами с пересекающимися под углом 2…3° осями в результате упругой деформации соединительных элементов.
Жесткий карданный шарнир неравных угловых скоростей передает вращающий момент от одного вала к другому вследствие подвижного соединения жестких деталей. Он состоит из двух вилок — 3 и 5, в цилиндрические отверстия которых установлены на подшипниках концы А, Б, В и Г соединительного элемента — крестовины 4. Вилки жестко соединены с валами 1 и 2. Вилка 5 может поворачиваться относительно оси БГ крестовины и в то же время вместе с крестовиной поворачиваться относительно оси АВ, благодаря чему и обеспечивается возможность передачи вращения от одного вала к другому при меняющемся угле между ними.

Рис. Схема жесткого карданного шарнира неравных угловых скоростей
Если вал 7 повернется вокруг своей оси на угол а, то вал 2 за это же время повернется на угол В. Соотношение между углами поворота валов 7 и 2 определяется выражением tga= tgВ*cosy, где у — угол, под которым расположены оси валов. Из этого выражения следует, что угол В то меньше угла а, то равен ему. Равенство этих углов наступает через каждые 90° поворота вала 7. Таким образом, при равномерном вращении вала 1 угловая скорость вала 2 неравномерна и изменяется по синусоидальному закону. Неравномерность вращения вала 2 будет тем значительнее, чем больше угол у между осями валов. Если неравномерность вращения вала 2 будет передаваться на валы агрегатов, в трансмиссии возникнут дополнительные пульсирующие нагрузки, возрастающие при увеличении угла у. Чтобы неравномерность вращения вала 2 не передавалась на валы агрегатов, в карданной передаче применяют два карданных шарнира. Их устанавливают так, чтобы углы у1 и у2 были равны; вилки карданных шарниров, закрепленные на неравномерно вращающемся валу 4, должны быть расположены в одной плоскости. Равномерность вращения ведомого вала может быть достигнута также применением карданного шарнира равных угловых скоростей.
Принцип действия карданного шарнира равных угловых скоростей поясняет схема, приведенная на рисунке. С ведущим валом 7 соединен рычаг 2, а с ведомым валом 4 — рычаг 3. Рычаги 2 и 3 при вращении валов постоянно контактируют в точке А, линейная скорость которой одинакова для обоих рычагов, т. е. v = = w1B = w2a= wа. Равенство угловых скоростей w2 и w2 возможно, если а = b. Это условие выполнимо, если угол 0 равен углу W и точка А контакта рычагов лежит на биссектрисе угла между валами 7 и 4. При вращении валов точка А должна находиться в биссекторной плоскости. Конструктивно это условие можно обеспечить различными способами. Наиболее широкое распространение получили карданные шарниры равных угловых скоростей шарикового типа. Применяются также другие типы шарниров равных угловых скоростей.

Рис. Схема карданного шарнира равных угловых скоростей
Устройство, Принцип Работы и Назначении, Основные Неисправности, Способы Диагностики и Ремонта
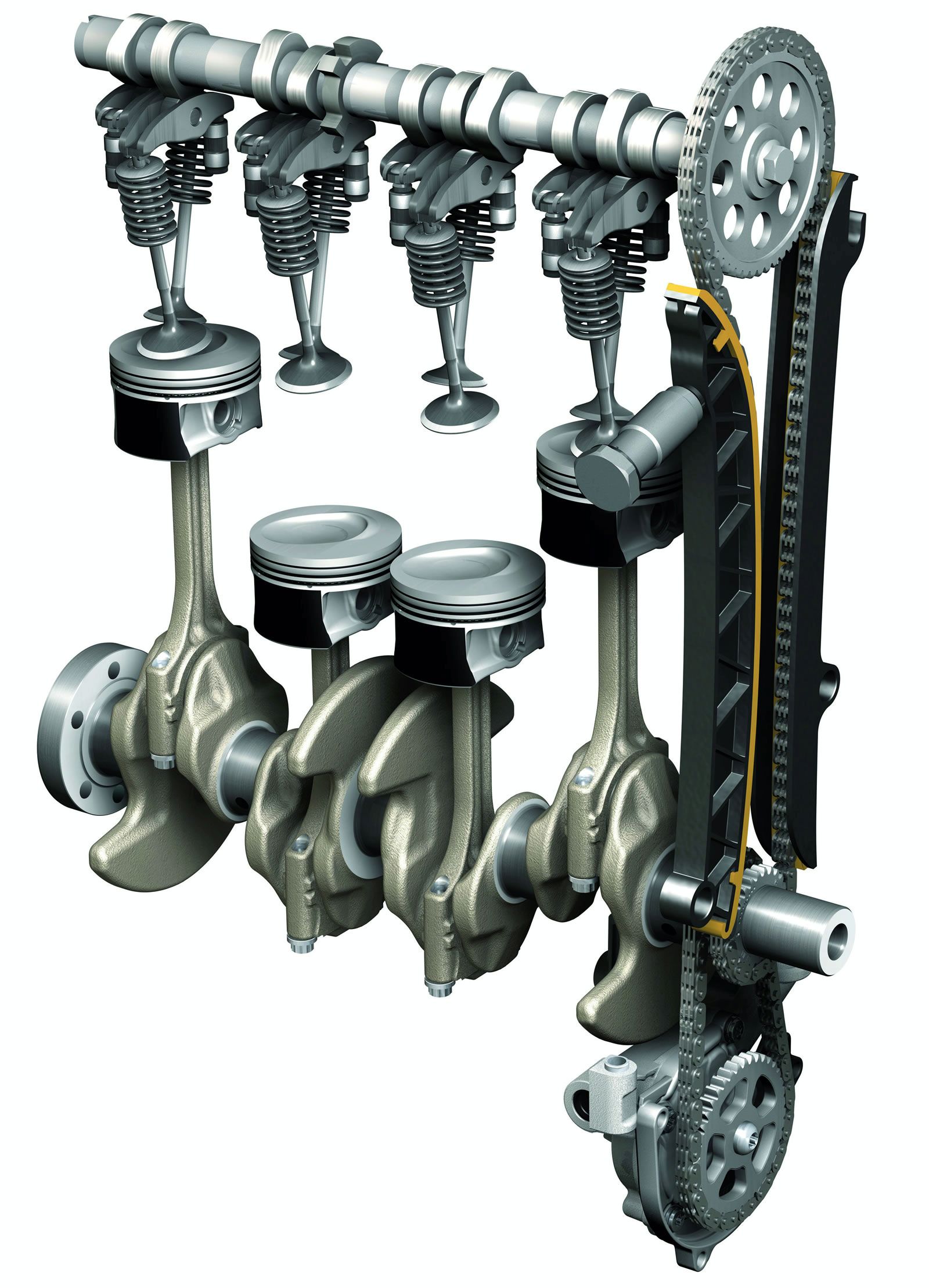
Основой любых силовых агрегатов и главной составляющей двигателей внутреннего сгорания является сложный газораспределительный механизм (ГРМ). Назначение газораспределительного механизма состоит в управлении впускными и выпускными клапанами двигателя. На такте впуска он открывает впускной клапан, смесь, состоящая из воздуха и топлива или воздуха (для дизельных двигателей), попадает в камеру сгорания. На такте выпуска — открытием выпускного клапана из камеры сгорания ГРМ удаляет отработанные газы.
Устройство газораспределительного механизма
Газораспределительный механизм состоит из следующих элементов:
- Распределительный вал — изготовляется из чугуна или стали — в задачу которого входит открывание/закрывание клапанов газораспределительного механизма при работе цилиндров. Он монтируется в картере, который перекрывает крышка газораспределительного механизма, или в головке блока цилиндра. При вращении вала на цилиндрических шейках происходит воздействие на клапан. На него воздействуют кулачки, расположенные на распределительном валу. На каждый клапан воздействует свой кулачек.
- Толкатели, изготовленные также из чугуна или стали. В их задачу входит передача усилия от кулачков на клапаны.
- Клапаны впускные и выпускные. В их задачу входит подача топливно-воздушное смеси в камеру сгорания и удаления отработочных газов. Клапан представляет из себя стержень с плоской головкой. Основным отличием впускных и выпускных клапанов является диаметр головки. Впускной состоит из стали с хромированным покрытием, а выпускной — из жаропрочной стали. Клапанный стержень изготавливается в виде цилиндра с канавкой, необходимой для фиксирования пружины. Клапана двигаются только по направлению ко втулкам. Чтоб масло не попадало в камеру сгорания цилиндра, производят установку уплотнительного колпачка. Его изготавливают из маслостойкой резины. На каждый клапан крепятся внутренняя и наружная пружина, для крепления используют шайбы, тарелки.
- Штанги. Они необходимы для передачи усилия от толкателей к коромыслу.
- Привод газораспределительного механизма. Он передает вращение коленвала на распредвал и тем самым приводит его в движения, причем движется он со скоростью в 2 раза меньше, чем скорость коленвала. На 2 вращения коленвала распредвал делает 1 вращение — это и называется рабочим циклом, при котором происходит 1 открытие клапанов.
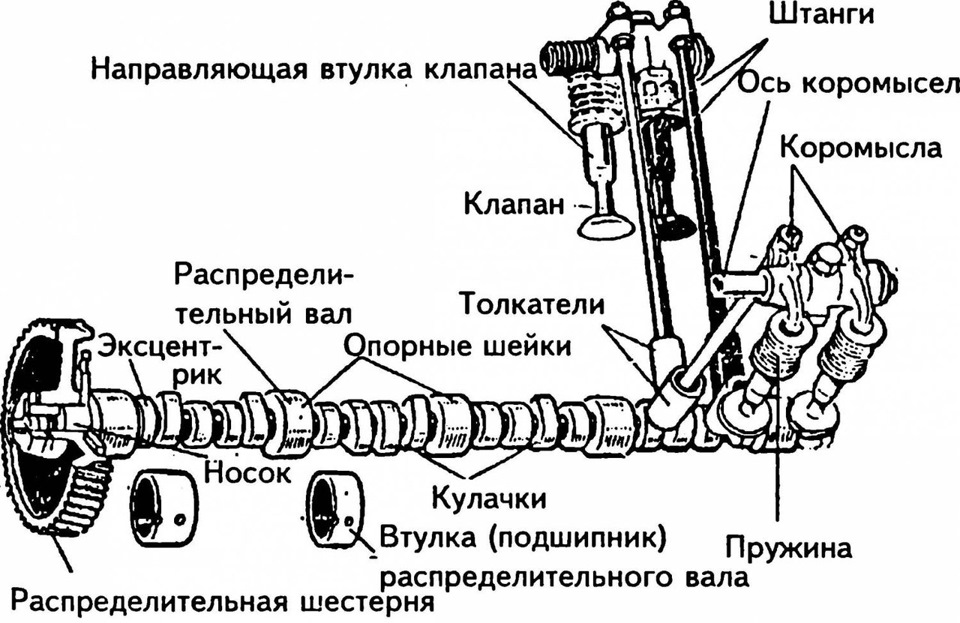
Схема устройства ГРМ
Таково устройство ГРМ и общая схема газораспределительного механизма. Теперь следует разобраться, каков принцип работы газораспределительного механизма.
Работа газораспределительного механизма
Работа системы газораспределения поделена на четыре фазы:
- Впрыск топлива в камеру сгорания цилиндра.
- Сжатие.
- Рабочий ход.
- Удаления газов из камеры сгорания цилиндра.
Рассмотрим подробнее принцип действия газораспределительного механизма.
- Подача топлива в камеру сгорания цилиндра происходит за счет движения коленвала, который передает свое усилие на поршень и он начинает движения из так называемой ВМТ (это точка, выше которой поршень не поднимается) в НМТ (это точка, соответственно, ниже которой поршень не опускается). При этом движении поршня одновременно открывается впускной клапан и топливно-воздушная смесь заполняет камеру сгорания цилиндра. Впрыснув положенное количество топливно-воздушной смеси клапан закрывается. При этом коленвал поворачивается на 180 градусов от своего начального положения.
- Сжатие. Дойдя до НМТ поршень продолжает свое движение. Меняя свое направление в ВМТ, в этот момент в цилиндре и происходит сжатие топливно-воздушной смеси. При подходе поршня к высшей точке фаза сжатия заканчивается. Коленчатый вал продолжает свое движения и поворачивается на 360 градусов. И на этом фаза сжатия закончена.
- Рабочий ход. Воздушно-топливная смесь воспламеняется свечей зажигания, когда поршень находится в высшей точке цилиндра. При этом достигается максимальный момент сжатия. Затем поршень начинает двигаться к нижней точке цилиндра, так как на поршень оказывают огромное давление газы, образовавшиеся при горении воздушно-топливной смеси. Это движение и есть рабочий ход. При опускании поршня до НМТ фаза рабочего хода считается завершенной.
- Удаления газов из камеры сгорания цилиндра. Поршень движется к высшей точке цилиндра, все это происходит при усилии, которое оказывает коленчатый вал газораспределительного механизма двигателя. При этом открывается выпускной клапан и поршень начинает избавлять камеру сгорания цилиндра от газов, которые образовались после сгорания топливно-воздушной смеси в камере сгорания цилиндра. После достижения высшей точки и освобождения ее от газов. Поршень начинает свое движение в низ. Когда поршень доходит да НМТ, то рабочая фаза удаления газов из камеры сгорания цилиндра считается законченной, а коленчатый вал совершает оборот на 720 градусов от своего начального положения.
Для точной работы клапанов газораспределительной системы происходит синхронизация с работой коленчатого вала двигателя.
Неисправности ГРМ
Основные неисправности газораспределительного механизма:
- Уменьшение компрессии и хлопки в трубопроводах. Как правило, происходит после появления нагара, раковин на поверхности клапана, их прогорания, причиной чего является не плотное прилегания впускных и выпускных клапанов к седлам. Также оказывают влияние такие факторы, как деформации ГБЦ, поломка или износ пружин, заедание клапанного стержня во втулке, полное отсутствие промежутка между коромыслом и клапанами.
- Уменьшение мощности, троение мотора, а также металлические стуки. Появляются эти признаки, потому что впускные и выпускные клапана не полностью открываются, и часть воздушно-топливной смеси не попадает в камеру сгорания цилиндра. Следствием этого является большой тепловой зазор или поломка гидрокомпенсатора, что и становится причиной неполадки и не штатной работы клапанов.
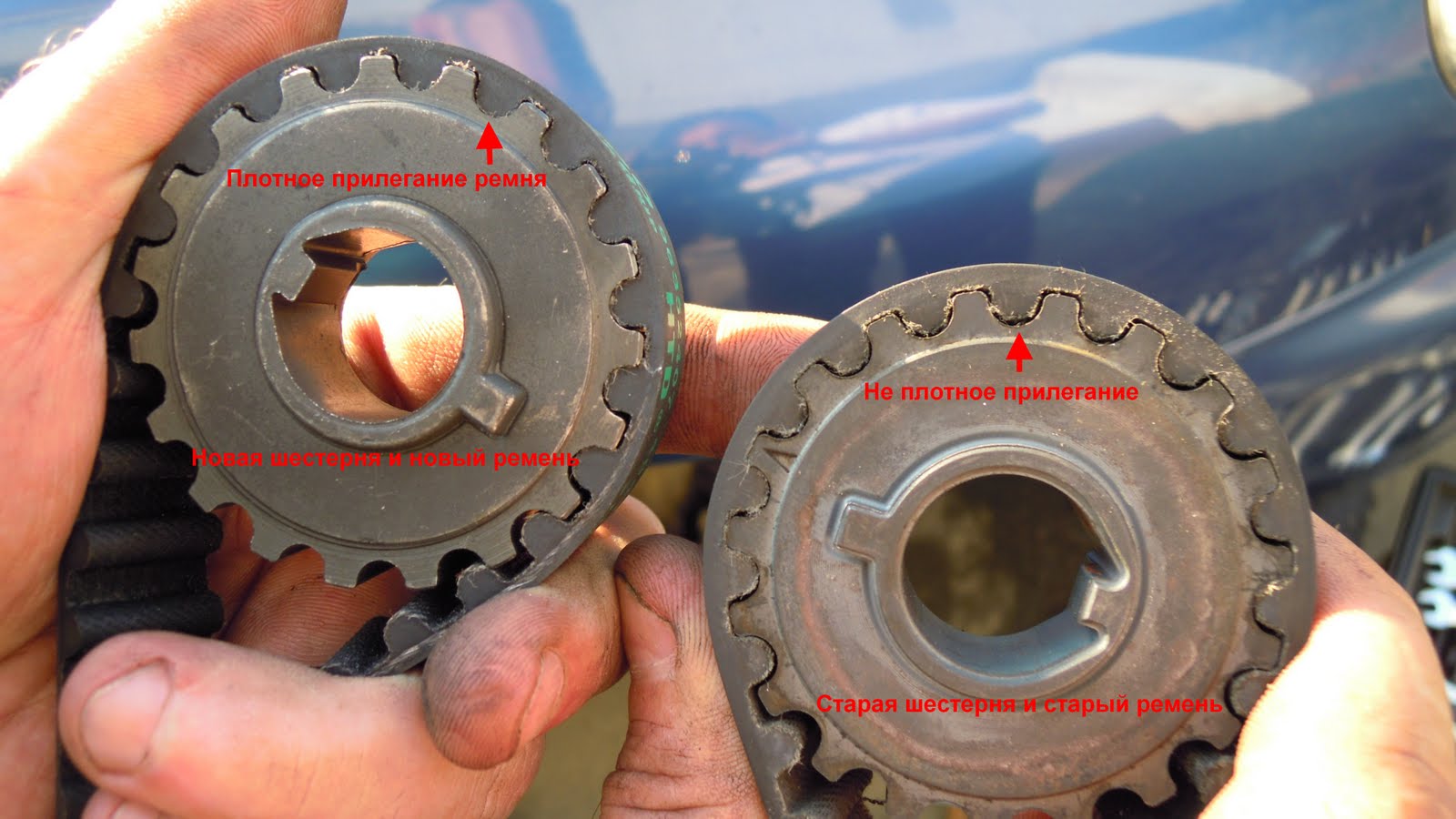
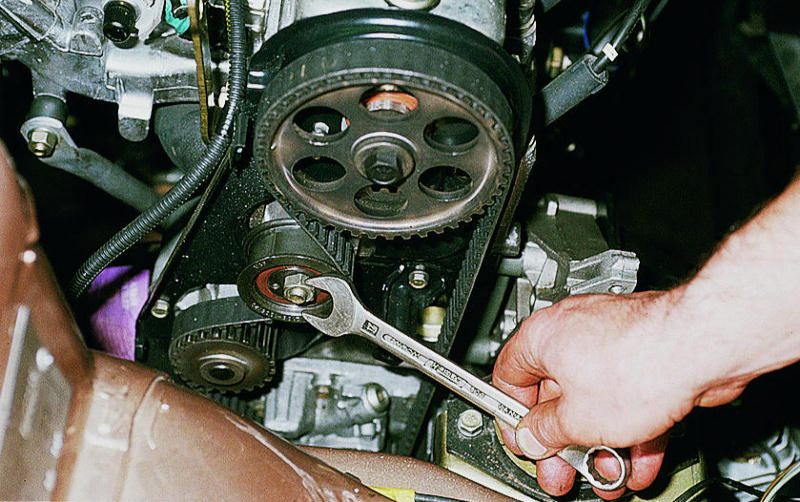
- Механический износ деталей, таких как: направляющих втулок коленвала, шестерни распредвала, а также смещение распредвала. Механический износ деталей, как правило, происходи при достаточном сроке работы мотора и работы двигателя в критических пределах.
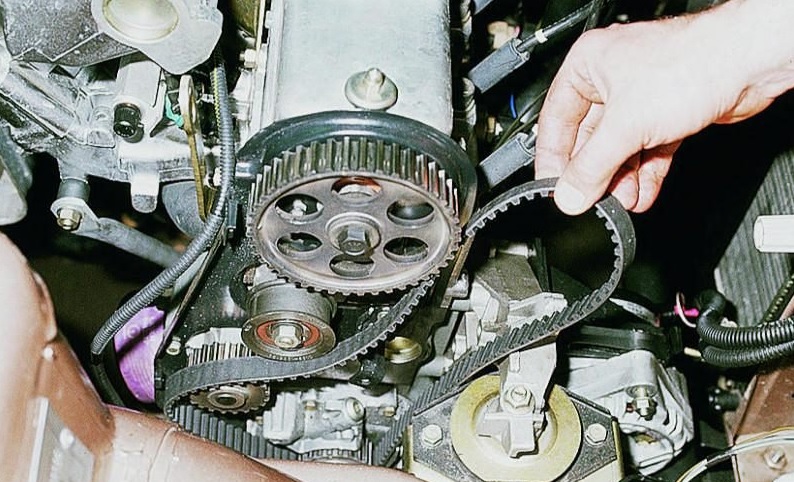
- Так же происходит выход из строя двигателя по причине износа зубчатого ремня, который имеет свой гарантийный срок службы, цепи, которая при длительном сроке работы и постоянном на нее воздействии становится менее работоспособной, успокоителя цепи и натяжителя зубчатого ремня.
В данных случаях не редко заменяют газораспределительный механизм, однако возможен и ремонт поврежденной детали газораспределительного механизма.

Диагностика ГРМ
Газораспределительный механизм имеет 2 свойственные неполадки — неплотное примыкание клапанов к гнездам и невозможность полностью открыть клапаны.
Неплотное примыкание клапанов к гнездам обнаруживается по таким показателям: хлопки, возникающие иногда во впускной либо выпускной трубе, уменьшение мощности мотора. Факторами неплотного закрытия клапанов могут быть:
- возникновение нагара на поверхности клапанов и гнезд;
- формирование раковин на рабочих фасках и искривление головки клапана;
- неисправность пружин клапанов.
Неполное открытие клапанов сопровождается стуком в троящем моторе и уменьшением его мощности. Данная поломка возникает в следствии значительного промежутка меж стержнем клапана и носком коромысла. К характерным поломкам для ГРМ нужно причислить кроме того изнашивание шестерен распредвала, толкателей, направляющих клапана, смещение распредвала и изнашивание втулок и осей коромысел.
Практика демонстрирует, что на газораспределительный механизм приходится примерно четвертая часть всех отказов мотора, а уже на предотвращение этих отказов и восстановление ГРМ уходит 50% трудоёмкости обслуживания и ремонтных работ. Для диагностирования поломок применяют следующие параметры:
- определяют фазы газораспределительного механизма автомобиля;
- измеряют тепловой зазор между клапаном и коромыслом;
- измеряют промежуток между клапаном и седлом.
Измерение фаз газораспределения
Подобное диагностирование ГРМ двигателя выполняется на заглушенном моторе с помощью особого набора устройств, среди которых имеются указатель, моментоскоп, малка-угломер и прочие дополнительные приборы. Для того, чтобы фиксировать период раскрытия впускного клапана на 1-ом цилиндре, необходимо покачивать вокруг своей оси коромысло, а далее направить коленвал мотора до момента появления зазора меж клапаном и коромыслом. Малка-угломер для замера разыскиваемого зазора ставится прямо на шкив коленвала.
Измерение теплового промежутка между клапаном и коромыслом
Тепловой зазор измеряют при помощи набора щупов либо иного особого устройства. Это набор из металлических пластинок длиной в 100мм, толщина которых обязана быть не больше 0,5мм. Коленвал мотора поворачивают вплоть до верхней предельной точки, в период такта сжатия подобранного для контроля цилиндра. Непосредственно благодаря щупам разной толщины, поочередно вставляемым в сформировавшееся отверстие, и измеряется зазор.
Данный метод не может дать результата при диагностировании ГРМ, когда неравномерен износ торца штока и бойка коромысла, а трудоемкость этого метода весьма значительная. Увеличить точность замеров позволяет особое устройство, которое состоит из корпуса и индикатора по типу часов. Подпружиненная подвижная рама содержит персональное соединение с ножкой этого индикатора. Раму фиксируют между коромыслом и клапанной пружиной. Когда открывается клапан, в период поворота коленвала, на индикаторе ставят 0. Распознает тепловой зазор последующее показание прибора, снимаемое в период поворота коленвала.
Определение промежутка между клапаном и седлом
Его можно оценить по объему воздуха, который будет выходить через уплотнитель перекрытых клапанов. Эта процедура прекрасно объединяется с чисткой форсунок. Когда они уже сняты, убирают валики коромысел и прикрывают все клапаны. Затем в камеру сгорания под большим давлением происходит подача сжатого воздуха. Поочередно на любом из контролируемых клапанов ставят устройство, которое позволяет измерить расход воздуха. Если потеря воздуха превысит разрешенную, выполняется ремонт газораспределительного механизма.
Процесс ремонта ГРМ
Частенько необходимо производить техническое обслуживание газораспределительного механизма. Основной проблемой являются износ шеек, кулачков вала и увеличение зазоров в подшипниках. Для того, чтобы устранить зазор в подшипниках коленчатого вала, производят его ремонт путем шлифовки опорных шеек и углубления канавок для подачи масла. Шейки нужно отшлифовать под ремонтный размер. После завершения ремонтных работ по восстановлению коленвала, нужно произвести проверку высоты кулачков.

На опорных поверхностях под шейки коленвала не должно быть никаких даже самых незначительных повреждений, а корпуса подшипников обязаны быть без трещин. После чистки и промывки распредвала обязательно нужно проверить зазор между его шейками и отверстием опоры головки цилиндра.
Для определения точного зазора требуется знать диаметр шейки распредвала, это позволит произвести установку соответствующего ей подшипника. Установив его на корпус, замерьте внутренний диаметр подшипника, затем отнимите его от диаметра шейки и таким образом найдете величину зазора. Он не может превышать 0,2мм.
Цепь не должна иметь никаких механических повреждений, быть растянутой более чем на 4мм. Цепь газораспределительного механизма можно регулировать: отверните стопорный болт на пол оборота, поверните коленвал на 2 оборота, затем стопорный болт нужно повернуть до упора.
Если у вас возникли вопросы — оставляйте их в комментариях под статьей. Мы или наши посетители с радостью ответим на них
1. Назначение и принцип действия
Для измерения неэлектрических величин применяется и частотный метод, при котором измеряемая величина преобразуется в переменное напряжение, частота которого зависит от этой величины. Достоинством частотного метода измерения является то, что в процессе передачи и дальнейшей обработки частотного выходного сигнала не возникает дополнительной погрешности. Действительно, если выходным сигналом датчика является напряжение, то при передаче такого сигнала на расстояние происходит падение напряжения на проводах линии связи. Если выходным сигналом датчика является, например, сопротивление, то к нему добавляется сопротивление проводов линии связи. А в частотном методе измерения наличие сопротивления проводов линии связи и внутреннего сопротивления измерительного прибора не изменяют частоту сигнала. Еще одним достоинством частотного сигнала является удобство преобразования его в цифровой код. Это особенно важно в связи с развитием в последнее время цифровых измерительных приборов и применением в автоматике цифровых вычислительных машин.
Наибольшее развитие для преобразования неэлектрических величин в частоту получили струнные датчики. Принцип действия струнного датчика основан на зависимости собственной частоты колебаний натянутой струны длиной l и массой т от силы натяжения F:
 (1)
(1)
Струнные датчики используются в приборах для измерения силы, давления, расхода, температуры и др. При воздействии на струну измеряемой силы струна практически не растягивается, поэтому первичный преобразователь (например, мембрана в датчике давления) работает, почти не деформируясь. Это обстоятельство существенно снижает погрешность измерения из-за механического гистерезиса и упругого последействия материала первичного преобразователя.
Струнный датчик (рис. 1) состоит из струны 1, возбудителя 2 и приемника 3. Одним концом струна жестко закреплена, а другим концом соединена с первичным преобразователем, например мембраной 4 на рис. 1. При изменении давления Р изменяется сила натяжения струны. С помощью возбудителя 2, которым может быть электромагнит, струна выводится из состояния равновесия и начинает колебаться с частотой f, определяемой давлением Р. Приемник 3 преобразует перемещение струны с частотой f в электрический сигнал такой же частоты. В качестве приемника 3 может использоваться индуктивный, емкостный или любой другой датчик. На практике чаще всего применяют электромагнитный датчик. Дело в том, что он может попеременно выполнять функции то возбудителя, то приемника. Когда на его обмотку подается напряжение, то он создает электромагнитную силу притяжения струны и возбуждает ее колебания. А когда струна уже колеблется, то с этой же обмотки снимается переменное напряжение, частота которого равна частоте колебаний струны.
 Рис.
1. Струнный датчик для измерения давления
Рис.
1. Струнный датчик для измерения давления
Струнные датчики используются в двух режимах: автогенераторном и в режиме работы по запросу. В первом случае струна постоянно колеблется, а во втором — работает в более легких условиях, срок службы ее увеличивается и датчик получается несколько проще.
1. Назначение и принцип действия
Для измерения неэлектрических величин применяется и частотный метод, при котором измеряемая величина преобразуется в переменное напряжение, частота которого зависит от этой величины. Достоинством частотного метода измерения является то, что в процессе передачи и дальнейшей обработки частотного выходного сигнала не возникает дополнительной погрешности. Действительно, если выходным сигналом датчика является напряжение, то при передаче такого сигнала на расстояние происходит падение напряжения на проводах линии связи. Если выходным сигналом датчика является, например, сопротивление, то к нему добавляется сопротивление проводов линии связи. А в частотном методе измерения наличие сопротивления проводов линии связи и внутреннего сопротивления измерительного прибора не изменяют частоту сигнала. Еще одним достоинством частотного сигнала является удобство преобразования его в цифровой код. Это особенно важно в связи с развитием в последнее время цифровых измерительных приборов и применением в автоматике цифровых вычислительных машин.
Наибольшее развитие для преобразования неэлектрических величин в частоту получили струнные датчики. Принцип действия струнного датчика основан на зависимости собственной частоты колебаний натянутой струны длиной l и массой т от силы натяжения F:
 (1)
(1)
Струнные датчики используются в приборах для измерения силы, давления, расхода, температуры и др. При воздействии на струну измеряемой силы струна практически не растягивается, поэтому первичный преобразователь (например, мембрана в датчике давления) работает, почти не деформируясь. Это обстоятельство существенно снижает погрешность измерения из-за механического гистерезиса и упругого последействия материала первичного преобразователя.
Струнный датчик (рис. 1) состоит из струны 1, возбудителя 2 и приемника 3. Одним концом струна жестко закреплена, а другим концом соединена с первичным преобразователем, например мембраной 4 на рис. 1. При изменении давления Р изменяется сила натяжения струны. С помощью возбудителя 2, которым может быть электромагнит, струна выводится из состояния равновесия и начинает колебаться с частотой f, определяемой давлением Р. Приемник 3 преобразует перемещение струны с частотой f в электрический сигнал такой же частоты. В качестве приемника 3 может использоваться индуктивный, емкостный или любой другой датчик. На практике чаще всего применяют электромагнитный датчик. Дело в том, что он может попеременно выполнять функции то возбудителя, то приемника. Когда на его обмотку подается напряжение, то он создает электромагнитную силу притяжения струны и возбуждает ее колебания. А когда струна уже колеблется, то с этой же обмотки снимается переменное напряжение, частота которого равна частоте колебаний струны.
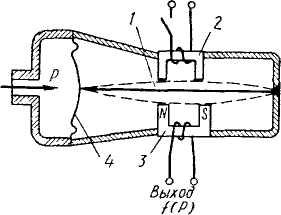 Рис.
1. Струнный датчик для измерения давления
Рис.
1. Струнный датчик для измерения давления
Струнные датчики используются в двух режимах: автогенераторном и в режиме работы по запросу. В первом случае струна постоянно колеблется, а во втором — работает в более легких условиях, срок службы ее увеличивается и датчик получается несколько проще.
назначение, классификация, принципы построения, примеры использования
Устройство которое подсчитывает число событий происходящих на их входе (либо положительный, либо отрицательный перепад).
По способу построения счётчики делятся на:
По направлению счёта:
По системе счисления:
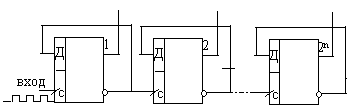
Основу составляют: Счётчик на базе Т-триггера (счётный триггер)
— прямой асинхронный двоичный счётчик.
2n – все выходы счётчика. n – количество триггеров.
Временные диаграммы (3-х разрядный)

| 2 | 1 | 4 | 2 | 1 |
0 0 0 0 1 1 1 1 | 0 0 1 1 0 0 1 1 | 0 1 0 1 0 1 0 1 | 1 1 1 1 0 0 0 0 | 1 1 0 0 1 1 0 0 | 1 0 1 0 1 0 1 0 |


 4
4Счёт в прямом направлении, если снимать с прямых входов. Инверсные входы будут образовывать обратный счёт.
Недостаток: быстродействие прямо пропорционально количеству разрядов.
В параллельных счётчиках сигнал синхронизации подаётся одноактно, а функция счётчика реализуется за счёт схемы подключения выхода счётчика по выходам счётчика.
Современные микросхемы счётчиков имеют разъёмы для наращивания разряда.
8. Полупроводниковая память: назначение, классификация. Принципы построения адресных зу.
Полупроводниковые ЗУ служат для хранения и обработки информации, обмена его с другими устройствами. Основные параметры ЗУ являются альтернативными друг другу: > информационная емкость противоречит быстродействию, что в свою очередь не сочетается с ценой. В связи с этим память в современных ЭВМ/ЦУ имеет многоступенчатую иерархическую структуру: 1ур – Регистровые ЗУ – встроенные в процессор (наиболее б/д память небольшого объема) – сокращение количества обращений к др. видам памяти. СОЗУ, РОН, РФ. 2 ур. – КЭШ память служит для хранения копий информации, участвующей в текущих операциях обмена. Размер – 512 кБ, высокое быстродействие обеспечивает повышение производительности системы в целом. 3 ур. – Основная память – полупроводниковая, постоянная или оперативная память ОЗУ, ПЗУ имеет достаточно большой объем но менее быстродействующая. Память хранит используемый в текущий момент фрагмент программы вместе с данными. Быстродействие в идеале должно быть согласовано с быстрод. процессора. В этом случае отпадает необходимость в КЭШ памяти. 4 ур. – специальные виды памяти – многопортовая, ассоциативная, видеопамять, буферы промежуточного хранения и др. Многопортовая ОЗУ. 5 ур – Внешняя память ВЗУ: магнитные диски, CD, флеш. Многие виды ВЗУ представляют собой механические устройства с вращающимся носителем информации, что ограничивает быстродействие таких устройств. ВЗУ имеют значительно большую емкость чем основная память при значительно более низком быстродействии. Особенность – возможность хранения информации при отсутствии питания. Основные параметры ЗУ: 1) Информационная емкость – max возможный объем хранимой информации (бит, байт, кбит, кбайт, Мбайт – 220б, Гбайт – 230б; если шина 32 разрядн – 232/230=4Гб), 2) Организация ЗУ – произведение числа хранимых слов на их разрядность: 2048*8=2кБайт, 3) Быстродействие ЗУ оценивается временем записи, длительностью цикла чтения-записи. Время считывания – интервал между моментами появления сигнала чтения и слова на выходе ЗУ. Время записи – интервал после появления сигнала записи, достаточного для установления запоминающей ячейки в состояние, заданное входным кодом. Минимально допустимый интервал между последовательными циклами чтения-записи образует соответствующий цикл доступа. Длительности цикла в чтении и записи несколько больше собственно цикла чтения и записи. Это связано с тем, что после выполнения операции требуется некоторое время для восстановления начала записи ЦУ.
Классификация ЗУ по способу доступа: 1)Адресные (Rom – ROM-M, P-ROM, EROM, EEROM, FLASH; RAM: статические: асинхронные, синхронные, конвейерные; динамические: стандартные, квазистандартные, повышенного быстродействия), 2) Последовательные (буферного типа – FIFO, LIFO, файловые, циклические), 3) Ассоциативные (Полностью ассоциативные, с прямым отображением, наборно-ассоциативные).
При адресном доступе код на адресн. входах указывает ячейку, к которой происходит обращение. Все ячейки в момент обращения равнодоступны, следов-но время обращения к любой ячейке одинаково. Другие типы ЗУ часто строится на базе адресных ЗУ (ROM, RAM, ОЗУ). ROM –read only memory – память только для чтения – ПЗУ. RAM – random access memory – память с произвольным доступом ОЗУ. ОЗУ – для хранения данных, которые могут быть изменены в произвольный момент времени: фрагмент исполняемой программы вместе с используемыми данными. Хранит информацию при наличии питания. Не является энергонезависимой памятью. Отличие между статическими и динамическими ОЗУ осуществляется в построении запоминающей ячейки. Ячейки статической ОЗУ – простейший асинхронный RS-триггер. Ячейка динамической ОЗУ представляет конденсатор, выполняемый в виде МОП-структуры. Информация в динамической запоминающей ячейке хранится в виде заряда конденсатора. Т.к. заряд конденсатора с течением времени уменьшается, ячейки динамического ОЗУ необходимо подвергать регенерации. (контроллеры регенерации –SRAM static RAM, DRAM — dynamic RAM). В случае асинхронных ЗУ сигналы управления могут быть как импульсными, так и потенциальными. В синхронных статических ОЗУ некоторые сигналы обязательно должны быть импульсными (сигн. управления – напр. сигнал выборки кристалла CS), позволяют привязать цикл обращения к тактам процессора. В конвейерных ОЗУ организован конвейерный принцип обработки информации, согласно которому цикл обработки (обращения к памяти) разбивается на несколько фаз. Конвейерной называют такую организацию исполнения команд обращения к памяти, при которой в каждом такте одновременно выполняются несколько команд, находящихся в различных фазах обработки. При конвейерной организации обмен осуществляется пакетами. Первое обращение в пакете – длинное (стандартное), 2е и последующие – более быстрые, за счет эффекта от конвейера.
Динамические ОЗУ характеризуются наибольшей информационной емкостью и относительно невысокой стоимостью. Как правило, именно они составляют основную память вычислительной машины.
В ПЗУ время записи >> времени чтения. Информация записывается в спец режиме (режиме программирования). Время программирования 1 запоминающей ячейки зависит от типа ПЗУ. В принципе, время считывания из ПЗУ соизмеримо с временем считывания из ОЗУ. ПЗУ – энергонезависимое устройство, хранящее информацию без питания. По типу запомин ячеек ПЗУ делятся на: масочные (ROMM – однократно программируемые), однократно программируемые (PROM), перепрограммируемые с УФ стиранием (EPROM – стирается сразу вся информация), перепрограммируемые с электрическим стиранием (EEPROM), Flash- память. 2 оставшихся типа предполагают электрическое стирание (можно стирать и программировать на плате). Избирательное стирание (до 1 блока). Flash программируется том же напряжении, при котором считывается (5V). Остальные используют дополнительные источники питания 12-25V.
Последовательные (Буферные, файловые, циклические).
-В буферах типа FIFO даже одна запись после записи в пустой буфер сразу доступна для чтения.
-В файловых ЗУ запись доступна для чтения только после заполнения буфера.
-В циклических ЗУ снова доступны одно за другим, кот определяются емкостью ЗУ, к такому типу ЗУ относят видеопамять.
-Кадровый буфер хранит инф-цию о пикселях.
Ассоциативные (полная ассоциация,с прямым отображением,наборн. ассоциат)
В ассоциативных ЗУ – поиск инф-ции осущ по некоторому пр-ку, а не по расположению в памяти (по адресу и месту расположения в буфере).
Стек-часть оперативной памяти процессора, буфер для временного хранения данных, кот представляет собой память с последующим доступом-стек.
Кэш – служит для хранения копий информации с памяти участвующей в текущей операции обмена.
Основные структуры адресных ЗУ:
2D – структура – двухмерная, с однокоординатной выборкой. ЗУ состоит из дешифратора адреса (DC), накопителя, усилителя записи/считывания, схема управления. Код, подаваемый на вход DC, активизирует одну из строк накопителей. В режиме записи усилитель считывания подключает входы данных запоминающих элементов накопителя. В результате входной код записывается в запомин элемент выбранной строки. В режиме чтения на выходах данных устанавливается код = содержимому ячеек активизированной строки накопителя. Направлением передачи данных управляет внешний сигнал Read/Write, обычно 0/1. Сигнал выборки кристалла CS – разрешает работу микросхемы вообще. Информационная емкость Vзу=2nx m=разрядность одной ячейки x на количество ячеек выхода. Недостаток структуры: сложность адресного дешифратора при большой информационной емкости.

Структура 3D с однобитной (одноразрядной) организацией накопителя.
Имеются два адресных дешифратора.
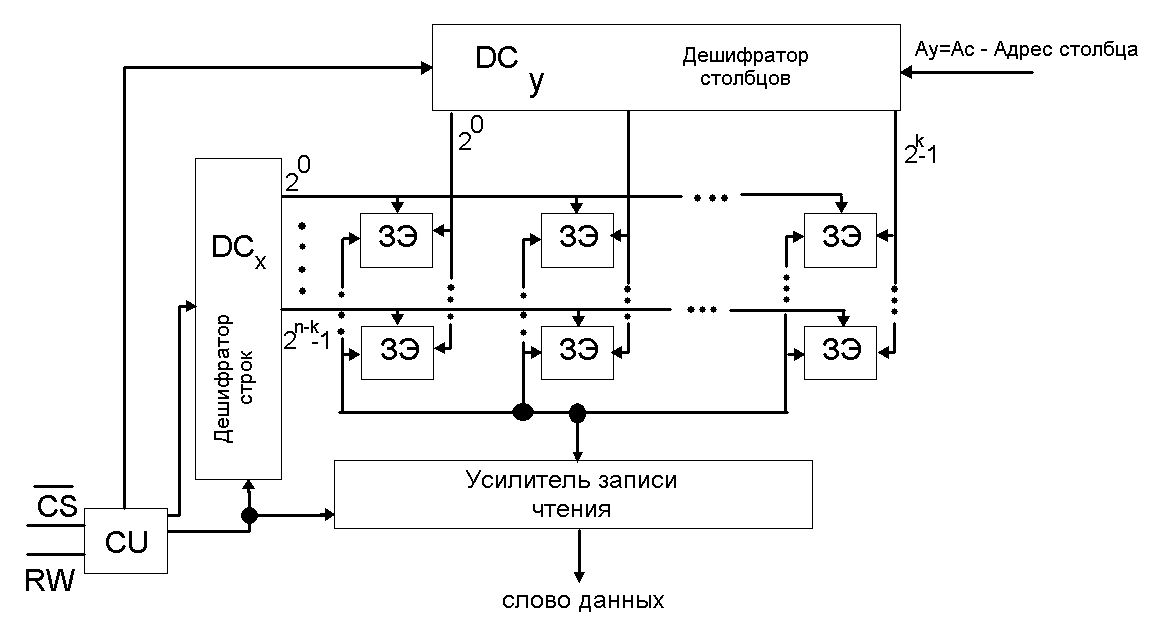
A=AxAy=Axn-k-1=Ax0Ayk…Ay0
DCx– дешифратор строк
DCy – дешифратор столбцов
В результате подачи адреса запомин ячейки на вход интегральной схемы ЗУ активизируется один запоминающий элемент, находящийся на пересечении строки и столбца, номер которого содержится в поле адреса. Достоинства 3D: сокращение общего количества выходов адресного дешифратора.
Nx=2n—k Ny=2k n-k=k=k/2, n – четное
N=Nx+Ny=2n/2+2n/2=2*2n/2=2*2k/2=2n/2+1
Недостаток: усложнение схемы запомин элемента за счет двухкоординатной выборки.
На базе структуры с одноразрядной организацией строятся структуры с многоразрядной организацией накопителя. В этом случае m- одноразрядных накопителей включаются параллельно относительно адресных дешифраторов, где m- разрядность слова данных. Получается полноценная 3D структура.
Достоинства 2D и 3D структур сочетаются в модифицированной 2D структуре 2DМ

1). Сигналом активного уровня с выхода DCx возбуждается 1 из 2n—k строк накопителя длиной m*2k, m – разрядность слова данных.
2). Сигналом активного уровня с выхода DCy из m*2k выбранных запомин элементов обращение осуществляется к одному слову из m элементов (т.е. в каждой из m групп элементов размером 2k выбирается один элемент – 1 бит слова данных).
3). В данном случае сложность схемы переносится на схему буфера данных, который должен иметь в своем составе m двунаправленных мультиплексоров с организацией 2kх1, кот. в режимах записи и чтения по коду адреса столбца формируют из длинной строки слово данных.
16. Назначение. Устройство и принцип работы агб-3
Авиагоризонт АГБ-3 (авиагоризонт бомбардировщика) — самый распространенный[источник не указан 1245 дней] авиагоризонт. Вид индикации — «с земли на самолёт». Предназначен для тяжелых неманевренных самолетов (бомбардировщиков) Конструктивное исполнение — автономный. Ввиду отсутствия дополнительной следящей рамы гироскопического датчика, рабочий диапазон углов тангажа ограничен углами 80 градусов. Имеет следующие модификации АГБ-3 (подсветка ультрафиолетовыми лучами, применяется на самолетах ОКБ Мясищева 3М, М-4), АГБ-3Б (белый подсвет шкалы), АГБ-3К (красный подсвет шкалы, самая распространенная модификация т.к. применяется на Ми-8/17, Як-40, Ил-76). С 1992 года по настоящее время выпускается 3-я серия прибора (АГБ-3К серия 3). Применяется на самолетах [[[Ан-24]], Ан-26, Ан-32, Як-40, Ил-62 и вертолетах семейства Ми-8/17.
Чувствительным элементом авиагоризонта является гироскопический датчик, не имеющий механической связи с механизмом указателя по каналу тангажа, но имеющий механическую связь по каналу крена. Указанная схема по некоторым сведениям была скопирована с трофейного американского авиагоризонта.
Авиагоризонты. В настоящее время применяются авиагоризонты типа АГК-47Б, АГБ-2, АГБ-3 (рис. 12), АГР-72, АГР-144 и дистанционные авиагоризонты типа АГД-1. Авиагоризонт АГД-1 (рис. 13) является наиболее распространенным.
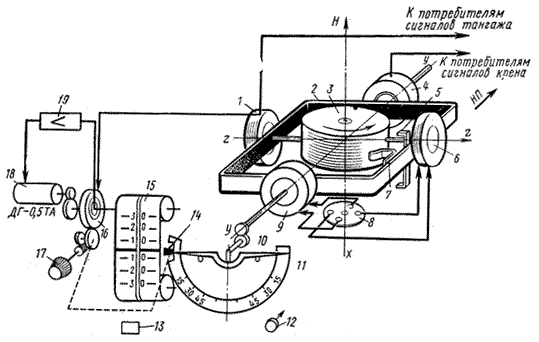
Рис. 12. Кинематическая схема авиагоризонта АГБ-3 1-сельсин-датчик тангажа: 2 рамка гироузла; 3 — гироузел; 4 — сельсин-датчик крена; 5-упор; 6,9-моментные двигатели; 7 — ограничитель; 8-жидкостный датчик коррекции; 10 ≈ силуэт самолета; 11 ≈ шкала крена; 12 ≈ арретир; 13 ≈ флажок отказа питания; 14-индекс; 15 — шкала тангажа; 16 — сельсин-приемник тангажа; 11-кремальера регулировки горизонта; 18-двигатель-генератор; 19 ≈ усилитель
17. Назначение и принцип устройства и работы эуп-53
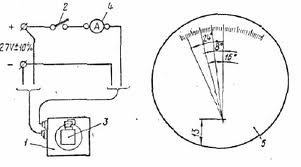
Назначение и принцип действия. Электрический указатель поворота ЭУП-53 показывает поворот самолета вокруг вертикальной оси с поперечным креном до 45 при скорости полета 500 кмч. Принцип действия указателя поворота основан на использовании свойств гироскопа с двумя степенями свободы совмещать ось собственного вращения с осью вынужденного вращения. Указатель поворота установлен на левой панели приборной доски пилотов, питается постоянным током напряжением 28,5 В. Включается в работу с помощью выключателя с надписью «ЭУП», который расположен на левой панели приборной доски. Защита цепи питания от коротких замыканий осуществляется автоматом защиты сети АЗС-2 с надписью «ЭУП», который установлен на щите АЗС. Указатель поворота представляет собой комбинированный прибор, который сочетает в себе указатель поворота и указатель скольжения, размещенные в одном корпусе (смотреть статью под номером 70). Разворот самолета вокруг вертикальной оси показывает стрелка 5, которая отклоняется относительно нулевой отметки шкалы. Отклонение стеклянного шарика вправо или влево па вираже указывает на соответствующее скольжение самолета. Чувствительным элементом и основной частью в указателе поворота является гироскоп с двумя степенями свободы, у которого главная ось расположена горизонтально. В качестве гироскопа используется гиромотор (электродвигатель постоянного тока) с центробежным регулятором, который поддерживает постоянную частоту вращения ротора гироскопа (6000 обмин). Ротор 1 гироскопа заключен в рамку 2, которая через передающий механизм воздействует на стрелку 5. Стрелка прибора поворачивается на угол, пропорциональный углу поворота рамки. При правом развороте самолета вокруг вертикальной оси рамка наклоняется влево и при помощи передающего механизма поворачивает стрелку вправо. Отклонившись вправо, стрелка показывает, что самолет совершает правый разворот. Для успокоения колебаний стрелки указатель поворота имеет демпфер 6, состоящий из цилиндра, внутри которого перемещается поршень. На лицевой части прибора расположена равномерная шкала, на которой вправо и влево от нулевой отметки шкалы имеются по три индекса с оцифровкой 45° на крайних индексах. Индексы шкалы предназначены для указания правильного разворота самолета вокруг вертикальной оси с поперечным креном 15, 30 и 45° при скорости полета 500 кмч. Угловая скорость разворота самолета для поперечного крена в 15° составляет (при скорости 500 кмч) 1,1 градс, в 30° — 2,3 градс, в 45° — 4 градс.
Указатель поворота работает следующим образом. Если самолет совершает прямолинейный горизонтальный полет, то стрелка прибора не отклоняется от нулевой отметки шкалы, так как нет действия внешних сил на гироскоп. Ось ротора гироскопа в этом случае находится в горизонтальном положении за счет натяжения пружин 3. При повороте самолета вокруг вертикальной оси на гироскоп действует внешняя сила, которая вызывает прецессионное движение гироскопа и рамки.
Понятия об элементах земного магнетизна

 Так
как магнитные и географические полюсы
Земли не совпадают, то магнитная стрелка
указывает направление север — юг только
прибли- Рис.
229. Положение магнитной стрелки
относительно стран света: а) в местах с
восточным магнитным склонением; б) в
местах с западным магнитным
склонением зительно.
Плоскость, в которой устанавливается
магнитная стрелка, называют плоскостью
магнитного меридиана данного места, а
прямую, по которой эта плоскость
пересекается с горизонтальной плоскостью,
называют магнитным меридианом. Угол
между направлениями магнитного и
географического меридианов называют
магнитным склонением; его принято
обозначать греческой буквой j.
Магнитное склонение изменяется от места
к месту на земном шаре. Магнитное
склонение называют западным или восточным
в зависимости от того, к западу (W)
или к востоку (О) от плоскости географического
меридиана отклоняется северный полюс
магнитной стрелки (рис. 229). Шкала измерения
склонения — от 0 до 180°. Часто восточное
склонение отмечают знаком «+», а западное
знаком «—». Из
рис. 228 видно, что линии земного магнитного
поля, вообще говоря, не параллельны
поверхности Земли. Это означает, что
магнитная индукция поля Земли не лежит
в плоскости горизонта данного места, а
образует с этой плоскостью некоторый
угол. Этот угол называется магнитным
наклонением. Магнитное наклонение часто
обозначают буквой i.
В разных местах Земли магнитное наклонение
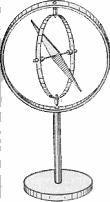
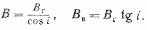
различно. Рис.
230. Магнитная стрелка, укрепленная в
кардановом подвесе, устанавливается
по направлению магнитной индукции
земного магнитного поля Рис.
231. Разложение магнитной индукции земного
магнитного поля на горизонтальную и
вертикальную составляющие Очень
ясное представление о направлении
магнитной индукции земного магнитного
поля в данной точке можно получить,
укрепив магнитную стрелку так, чтобы
она могла свободно вращаться и вокруг
вертикальной и вокруг горизонтальной
оси. Это можно осуществить, например, с
помощью подвеса (так называемого
карданова подвеса), показанного на рис.
230. Стрелка устанавливается при этом по
направлению магнитной индукции поля.
Магнитное склонение и магнитное
наклонение (углы j
и i)
полностью определяют направление
магнитной индукции земного магнитного
поля в данном месте. Остается еще
определить числовое значение этой
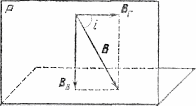
величины. Пусть плоскость Р на рис. 231
представляет собой плоскость магнитного
меридиана данного места. Лежащую в этой
плоскости магнитную индукцию земного
магнитного поля В мы можем разложить
на две составляющие: горизонтальную Вг
и вертикальную Вв. Зная угол i
(наклонение) и одну из составляющих, мы
можем легко вычислить другую составляющую
или сам вектор В, Если, например, нам
известен модуль горизонтальной
составляющей Вг, то из прямоугольного
треугольника находим На
практике оказывается наиболее удобным
непосредственно измерять именно
горизонтальную составляющую земного
магнитного поля. Поэтому чаще всего
магнитную индукцию этого поля в том или
ином месте Земли характеризуют модулем
ее горизонтальной составляющей. Таким
образом, три величины: склонение,
наклонение и числовое
значение горизонтальной составляющей
полностью характеризуют магнитное поле
Земли в данном месте. Эти
три величины называют элементами земного
магнитного поля.
Так
как магнитные и географические полюсы
Земли не совпадают, то магнитная стрелка
указывает направление север — юг только
прибли- Рис.
229. Положение магнитной стрелки
относительно стран света: а) в местах с
восточным магнитным склонением; б) в
местах с западным магнитным
склонением зительно.
Плоскость, в которой устанавливается
магнитная стрелка, называют плоскостью
магнитного меридиана данного места, а
прямую, по которой эта плоскость
пересекается с горизонтальной плоскостью,
называют магнитным меридианом. Угол
между направлениями магнитного и
географического меридианов называют
магнитным склонением; его принято
обозначать греческой буквой j.
Магнитное склонение изменяется от места
к месту на земном шаре. Магнитное
склонение называют западным или восточным
в зависимости от того, к западу (W)
или к востоку (О) от плоскости географического
меридиана отклоняется северный полюс
магнитной стрелки (рис. 229). Шкала измерения
склонения — от 0 до 180°. Часто восточное
склонение отмечают знаком «+», а западное
знаком «—». Из
рис. 228 видно, что линии земного магнитного
поля, вообще говоря, не параллельны
поверхности Земли. Это означает, что
магнитная индукция поля Земли не лежит
в плоскости горизонта данного места, а
образует с этой плоскостью некоторый
угол. Этот угол называется магнитным
наклонением. Магнитное наклонение часто
обозначают буквой i.
В разных местах Земли магнитное наклонение
различно. Рис.
230. Магнитная стрелка, укрепленная в
кардановом подвесе, устанавливается
по направлению магнитной индукции
земного магнитного поля Рис.
231. Разложение магнитной индукции земного
магнитного поля на горизонтальную и
вертикальную составляющие Очень
ясное представление о направлении
магнитной индукции земного магнитного
поля в данной точке можно получить,
укрепив магнитную стрелку так, чтобы
она могла свободно вращаться и вокруг
вертикальной и вокруг горизонтальной
оси. Это можно осуществить, например, с
помощью подвеса (так называемого
карданова подвеса), показанного на рис.
230. Стрелка устанавливается при этом по
направлению магнитной индукции поля.
Магнитное склонение и магнитное
наклонение (углы j
и i)
полностью определяют направление
магнитной индукции земного магнитного
поля в данном месте. Остается еще
определить числовое значение этой
величины. Пусть плоскость Р на рис. 231
представляет собой плоскость магнитного
меридиана данного места. Лежащую в этой
плоскости магнитную индукцию земного
магнитного поля В мы можем разложить
на две составляющие: горизонтальную Вг
и вертикальную Вв. Зная угол i
(наклонение) и одну из составляющих, мы
можем легко вычислить другую составляющую
или сам вектор В, Если, например, нам
известен модуль горизонтальной
составляющей Вг, то из прямоугольного
треугольника находим На
практике оказывается наиболее удобным
непосредственно измерять именно
горизонтальную составляющую земного
магнитного поля. Поэтому чаще всего
магнитную индукцию этого поля в том или
ином месте Земли характеризуют модулем
ее горизонтальной составляющей. Таким
образом, три величины: склонение,
наклонение и числовое
значение горизонтальной составляющей
полностью характеризуют магнитное поле
Земли в данном месте. Эти
три величины называют элементами земного
магнитного поля.
Назначение, устройство и принцип работы магнитного маятника.
Принцип действия магнитного компаса основан на свойстве магнитной стрелки устанавливаться по направлению магнитных силовых линий поля Земли. Магнитный компас измеряет магнитный курс (МК), т. е. угол между направлением горизонтальной составляющей магнитного поля Земли и проекций продольной оси летательного аппарата на горизонтальную плоскость.
Основными элементами магнитного компаса являются (рис.4): подвижная система (картушка), включающая магниты 3, поплавок 2, лимб 1 (шкалу) и шпильку 10; котелок 5 с жидкостью 6; колонка 7 с подпятником 9. Лимб картушки разградуирован на 360°. Вес картушки благодаря поплавку 2 ,уменьшен настолько, что давление шпильки 10 на подпятник 9 незначительно, что способствует уменьшению трения.

 Рис.4.Схема
магнитного компаса:
Рис.4.Схема
магнитного компаса:
1—лимб картушки; 2—поплавок; 3— магниты; 4—стекло; 5—котелок;6— жидкость; 7—колонка; в—уводящая камера; 9— подпятник; 10—шпилька;11—курсовая черта.
К поплавку прикрепляется одна или несколько пар постоянных магнитов, направленных одноименными полюсами в одну сторону. Оси магнитов параллельны линии 0—180° лимба. Мембранная коробка в нижней части котелка служит для компенсации изменения объема жидкости при изменении температуры. В качестве жидкости используется лигроин.
Картушка компаса, будучи выведенной из состояния покоя, совершает колебания. Для оценки этих колебаний составим уравнение движения картушки. На картушку действуют момент инерционных сил Jj , момент сил вязкого сопротивления kj, устанавливающий момент от взаимодействия постоянных магнитов с магнитным полем Земли MH*sin(j—y), момент сухого трения шпильки о подпятник Мтр и возмущающий моментМм, вызванный влиянием посторонних магнитных полей. Сумма этих моментов равна нулю или
Для уменьшения застоя необходимо уменьшать трение шпильки о подпятник и увеличивать магнитный момент М постоянных магнитов. Уменьшение трения достигается увеличением плавучести картушки и выбором в качестве подпятника твердого камня (агат, рубин, сапфир и, др.). Величина момента трения Мтр зависит также от поведения подвижной системы компаса. При работе компаса на самолете корпус прибора подвергается колебаниям, которые передаются на подпятник. Колебания подпятника способствуют уменьшению момента трения Мтр, поэтому застой компаса на самолете значительно меньше, чем на неподвижном основании. Застой в современных компасах меньше 1°, поэтому при рассмотрении динамических характеристик компаса будем им пренебрегать.
В зависимости от величины относительного коэффициента затухания d движения картушки могут быть затухающими (при d<1) или апериодическими (при d>1). В целях получения минимального времени успокоения компаса обычно выбирают



 аким
образом, можно отметить следующие четыре
динамические характеристики магнитного
компаса: относительный коэффициент
затухания d,
частоту собственных колебаний ( или
время успокоения ) увлечение и застой
.
аким
образом, можно отметить следующие четыре
динамические характеристики магнитного
компаса: относительный коэффициент
затухания d,
частоту собственных колебаний ( или
время успокоения ) увлечение и застой
.
Магнитные компасы применяются на самолетах в качестве дублирующих приборов и используются в случае выхода из строя других курсовых приборов.
Общий вид компаса типа КИ-12 показан на рис.5. Картушка этого прибора имеет вертикальную шкалу.
На рис.6 дан чертеж компаса. Картушка 8 с вертикальной шкалой, несущая магниты 12, с помощью керна 9 опирается на подпятник 10 из камня. Колонка с пружиной 11 прикреплена к пластмассовому корпусу при помощи гайки с пружинной шайбой.
Шкала картушки равномерная с ценой деления 5° и оцифровкой через 30°. Оси магнитов 12 параллельны линии С—Ю шкалы. Курсовая нить шкалы, связанная с корпусом прибора и отображающая направление продольной оси самолета, окрашена светящейся массой.
Компасный курс самолета отсчитывается по делениям шкалы против курсовой черты.
Погрешности магнитного компаса.
Магнитным компасам присущи погрешности, среди которых наибольшее значение имеют девиации, креновые девиации и поворотные погрешности.
Магнитные поля, создаваемые железными и стальными массами, а также электрическими аппаратами, искажают магнитное поле Земли. Под влиянием этих дополнительных магнитных полей картушка компаса отклоняется от направления магнитного меридиана Земли. Это отклонение называется девиацией компаса и обозначается d. Девиация d считается положительной, если северный конец магнитов картушки отклоняется от магнитного меридиана к востоку; при отклонении к западу девиация отрицательна.
Для получения истинного курса (ИК) к компасному курсу (КК) необходимо добавить девиацию d и магнитное склонение D, т. е.
ИК=МК+d+D. (5)
Магнитные, поля на летательном аппарате, вызывающие девиацию компаса, можно разделить на два составляющих поля:
а) поле, создаваемое стальными предметами, направление которого относительно осей летательного аппарата неподвижно и не зависит от курса;
б) поле, создаваемое мягким железом, направление которого относительно указанных осей переменно и зависит от курса полета.
Стальные предметы, создающие первое поле, обычно обладают большой коэрцитивной силой и представляют по существу постоянные магниты. При полете на любом курсе они сохраняют свои магнитные свойства неизменными.
Предметы из мягкого железа не сохраняют своих магнитных свойств неизменными при изменении курса. Создаваемое ими поле зависит от курса летательного аппарата.