


Электромагнитный момент  синхронного двигателя с явнополюсным ротором определяется выражением
синхронного двигателя с явнополюсным ротором определяется выражением
 (4.4)
(4.4)
где  – число фаз обмотки статора;
– число фаз обмотки статора;  – э.д.с. обмотки статора;
– э.д.с. обмотки статора;  ;
;  – напряжение (фазное), подведенное к обмотке статора;
– напряжение (фазное), подведенное к обмотке статора;  и
и 
 – угол между осью результирующего магнитного потока и осью полюсов ротора, град;
– угол между осью результирующего магнитного потока и осью полюсов ротора, град;  – угловая синхронная скорость;
– угловая синхронная скорость;
Анализ выражения (4.4) показывает, что электромагнитный момент синхронного двигателя с явнополюсным ротором представляет собой сумму двух моментов – основного момента
и реактивного момента
 (4.6)
(4.6)
Основной момент МОСН„ зависит от величины магнитного потока возбуждения ( ) и от напряжения питания U1. Реактивный момент не зависит от ФB, поэтому он имеет место даже при отсутствии возбуждения синхронной машины.
Таким образом, результирующий электромагнитный момент синхронного двигателя
Появление реактивного момента обусловлено разностью магнитных сопротивлений явнополюсной синхронной машины по продольной и поперечной осям (см. рис. 4.4, а). Даже при отсутствии возбуждения в синхронной явнополюсной машине магнитное поле статора за счет притяжения явно выраженных полюсов ротора создает силы FМ, тангенциальные составляющие которых  стремятся повернуть ротор в положение, при котором магнитный поток статора имеет на своем пути минимальное магнитное сопротивление (рис. 4.10). Магнитное поле статора вращается, а поэтому между осью полюса и осью потока статора появляется пространственный угол сдвига
стремятся повернуть ротор в положение, при котором магнитный поток статора имеет на своем пути минимальное магнитное сопротивление (рис. 4.10). Магнитное поле статора вращается, а поэтому между осью полюса и осью потока статора появляется пространственный угол сдвига
. Совокупность сил , действующих на каждый полюс ротора, создаст реактивный момент МP, направленный в сторону вращения поля статора.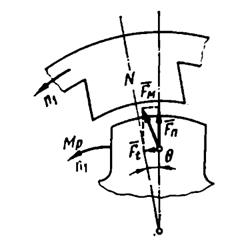
Рис. 4.10. К понятию о реактивном моменте
Если ротор двигателя неявнополюсный  , то реактивного момента не возникает, так как магнитное сопротивление ротора по продольной и поперечной осям одинаково (см. рис. 4.4. б).
, то реактивного момента не возникает, так как магнитное сопротивление ротора по продольной и поперечной осям одинаково (см. рис. 4.4. б).
Из выражений (4.5) и (4.6) следует, что как основной, так и реактивный моменты зависят от угла (рис. 4.11). Зависимость основного момента  от угла
от угла
= 90°. Зависимость реактивного момента  также синусоидальна, но с двумя максимальными значениями момента в пределах изменения угла от 0 до 180°: положительным (при
также синусоидальна, но с двумя максимальными значениями момента в пределах изменения угла от 0 до 180°: положительным (при  °) и отрицательным (при
°) и отрицательным (при 
 , полученная путем сложения составляющих моментов, называется угловой характеристикой синхронного двигателя.
, полученная путем сложения составляющих моментов, называется угловой характеристикой синхронного двигателя. 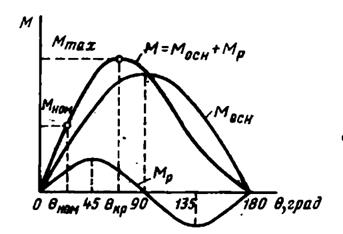
Рис. 4.11. Угловая характеристика синхронного двигателя
С увеличением нагрузочного момента растет угол сдвига между осью потока статора и осью полюсов ротора (угол ). В этом случае увеличивается электромагнитный момент
, равном некоторому критическому значению  , электромагнитный момент становится максимальным MMAX. Дальнейший рост нагрузки (угла ) обусловливает уменьшение электромагнитного момента. При этом неуравновешенная часть нагрузочного момента вызывает снижение частоты вращения ротора, что ведет к «выпадению» двигателя из синхронизма и к его остановке.
, электромагнитный момент становится максимальным MMAX. Дальнейший рост нагрузки (угла ) обусловливает уменьшение электромагнитного момента. При этом неуравновешенная часть нагрузочного момента вызывает снижение частоты вращения ротора, что ведет к «выпадению» двигателя из синхронизма и к его остановке.Таким образом, работа синхронного двигателя будет устойчивой лишь при нагрузках, соответствующих значениям угла , не превышающим  . Максимальный момент синхронного двигателя принято называть моментом выхода из синхронизма.
. Максимальный момент синхронного двигателя принято называть моментом выхода из синхронизма.
Отношение максимального электромагнитного момента к номинальному называется перегрузочной способностью синхронного двигателя. Обычно перегрузочная способность синхронных двигателей 
Если ротор синхронного двигателя неявнополюсный, то момент двигателя М равен основному моменту МОСН, так как вследствие равенства  и
и  реактивный момент в этом случае равен нулю.
реактивный момент в этом случае равен нулю.
Угловая характеристика такого двигателя представляет собой синусоиду (рис. 4.11, кривая МОСН).
Пуск синхронного двигателя непосредственным включением в сеть невозможен, так как ротор из-за своей значительной инерции не может быть сразу увлечен вращающимся полем статора, частота вращения которого устанавливается мгновенно. В результате устойчивая магнитная связь между статором и ротором не возникает. Для пуска синхронного двигателя приходится применять специальные способы, сущность которых состоит в предварительном приведении ротора во вращение до синхронной или близкой к ней частоте, при которой между статором и ротором устанавливается устойчивая магнитная связь.
В настоящее время практическое применение имеет способ пуска, получивший название асинхронного. Этот способ пуска возможен при наличии в полюсных наконечниках ротора пусковой обмотки (клетки), аналогичной успокоительной обмотке синхронного генератора (см. рис. 21.8). Схема включения двигателя при этом способе пуска приведена на рис. 22.3,
Рис. 22.3. Асинхронный пуск синхронного двигателя
Взаимодействие этих токов с полем статора вызывает появление на стержнях пусковой клетки электромагнитных сил . Под действием этих сил ротор приводится во вращение (рис. 22.3, б). После разгона ротора до частоты вращения, близкой к синхронной , обмотку возбуждения подключают к источнику постоянного тока. Образующийся при этом синхронный момент [см. (21.10)] втягиваем ротор двигателя в синхронизм. После этого пусковая обмотка двигателя выполняет функцию успокоительной обмотки, ограничивая качания ротора (см. § 21.4).
Чем меньше нагрузка на валу двигателя, тем легче его вхождение в синхронизм. Явнополюсные двигатели малой мощности, пускаемые без нагрузки на валу, иногда входят в синхронизм лишь за счет реактивного момента, т. е. даже без включения обмотки возбуждения.
С увеличением нагрузочного момента на валу вхождение двигателя в синхронизм затрудняется. Наибольший нагрузочный момент, при котором ротор синхронного двигателя еще втягивается и синхронизм, называют моментом входа двигателя в синхронизм . Величина асинхронного момента при частоте вращения зависит от активного сопротивления пусковой клетки, т. е. от сечения стержней и удельного электрического сопротивления металла, из которого они изготовлены (см. рис. 13. ).
Следует обратить внимание, что выбор сопротивления пусковой клетки , соответствующего значительному пусковому моменту , способствует уменьшению момента входа в синхронизм и, наоборот, при сопротивлении , соответствующем небольшому пусковому моменту ( ), момент входа в синхронизм увеличивается (рис. 22.4).
Рис. 22.4. Асинхронные моменты при пуске синхронного двигателя:
, — основной момент;
— дополнительный момент,
— момент входа в синхронизм
В процессе асинхронного пуска обмотку возбуждения нельзя оставлять разомкнутой, так как магнитный поток статора, пересекающий ее в начальный период пуска с синхронной скоростью, наводит в ней ЭДС. Вследствие большого числа витков обмотки возбуждения эта ЭДС достигает значений, опасных как для целости изоляции самой обмотки, так и для обслуживающего персонала. Для предотвращения этого обмотку возбуждения на период разгона ротора замыкают на активное сопротивление , примерно в десять раз большее сопротивления обмотки возбуждения. Переключение зажимов И1 и И2 обмотки возбуждения с сопротивления на зажимы возбудителя осуществляют переключателем П (см. рис. 22.3, а).
Замыкание накоротко обмотки возбуждения на время пускания двигателя нежелательно, так как при этом обмотка ротора образует однофазный замкнутый контур, взаимодействие которого с вращающимся полем статора также создает дополнительный асинхронный момент . Однако при частоте вращения, равной половине синхронной, этот момент становится тормозящим (рис. 22.4) и создает «провал» в характеристике пускового (асинхронного) момента (пунктирная кривая). Это заметно ухудшает пусковые свойства синхронного двигателя.
При асинхронном пуске синхронного двигателя возникает значительный пусковой ток. Поэтому пуск синхронных двигателей непосредственным включением в сеть на номинальное напряжение применяют при достаточной мощности сети, способной выдерживать без заметного падения напряжения броски пускового тока пяти- или семикратного значения (по сравнению с номинальным током). Если же мощность сети недостаточна, то можно применить пуск двигателя при пониженном напряжении (см. § 15.2): автотрансформаторный или реакторный.
Устройство синхронной машины — Студопедия
Конструктивная схема машины.Синхронные машины выполняют с неподвижным или вращающимся якорем. Машины большой мощности для удобства отвода электрической энергии со статора или подвода ее выполняют с неподвижным якорем (рис. 1.2, а)
Поскольку мощность возбуждения невелика по сравнению смощностью, снимаемой с якоря (0,3–3%), подвод постоянного тока к обмотке возбуждения с помощью двух колец не вызывает особых затруднений. Синхронные машины небольшой мощности выполняют как с неподвижным, так и с вращающимся якорем.
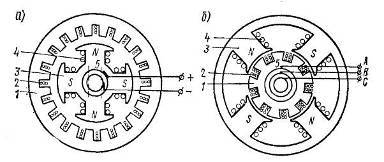
Рис. 1.2 – Конструктивная схема синхронной машины
с неподвижным и вращающимся якорем:
1 – якорь, 2 – обмотка якоря, 3 – полюсы индуктора,
4 – обмотка возбуждения, 5 – кольца и щетки
Синхронную, машину с вращающимся якорем и неподвижным индуктором (рис. 1.2, б )называют обращенной.
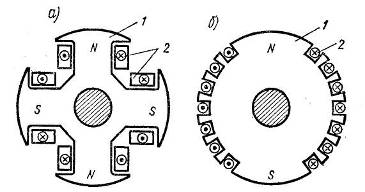
Рис. 1.3 – Роторы синхронной явнополюсной (а) и неявнополюсной (6) машин:
1 – сердечник ротора, 2 – обмотка возбуждения
Конструкция ротора. В машине с неподвижным якорем применяют две конструкции ротора: явнополюсную – с явно выраженными полюсами (рис. 1.3, а) и неявнополюсную – с неявно выраженными полюсами (рис. 1.3, б ). Явнополюсный ротор обычно используют в машинах с четырьмя и большим числом полюсов. Обмотку возбуждения выполняют в этом случае в виде цилиндрических катушек прямоугольного сечения, которые размещают на сердечниках полюсов и укрепляют при помощи полюсных наконечников. Ротор, сердечники полюсов и полюсные наконечники изготовляют из стали. Двух- и четырехполюсные машины большой мощности, работающие при частоте вращения ротора 1500 и 3000 об/мин, изготовляют, как правило, с неявнополюсным ротором. Применение в них явнополюсного ротора невозможно по условиям обеспечения необходимой механической прочности крепления полюсов и обмотки возбуждения. Обмотку возбуждения в такой машине размещают в пазах сердечника ротора, выполненного из массивной стальной поковки, и укрепляют немагнитными клиньями. Лобовые части обмотки, на которые воздействуют значительные центробежные силы, крепят при помощи стальных массивных бандажей. Для получения распределения магнитной индукции, близкого к синусоидальному, обмотку возбуждения укладывают в пазы, занимающие 2 /3 каждого полюсного деления.
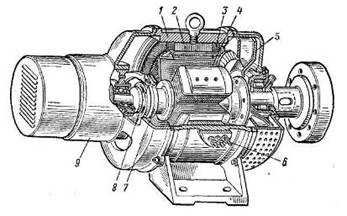
Рис. 1.4 – Устройство явнополюсной машины:
1 – корпус, 2 – сердечник статора, 3 – обмотка статора, 4 – ротор,
5 – вентилятор, 6 – выводы обмотки статора, 7 – контактные кольца,
8 – щетки, 9 – возбудитель
На рис. 1–4 показано устройство явнополюсной синхронной машины. Сердечник статора собран из изолированных листов электротехнической стали и на нем расположена трехфазная обмотка якоря. На роторе размещена обмотка возбуждения.
Полюсным наконечникам в явнополюсных машинах обычно придают такой профиль, чтобы воздушный зазор между полюсным наконечником и статором был минимальным под серединой полюса и максимальным у его краев, благодаря чему кривая распределения индукции в воздушном зазоре приближается к синусоиде.
В синхронных двигателях с явнополюсным ротором в полюсных наконечниках размещают стержни пусковой обмотки (рис. 1–5), выполненной из материала с повышенным удельным сопротивлением (латуни и др.). Такую же обмотку (типа «беличья клетка»), состоящую из медных стержней, применяют и в синхронных генераторах; ее называют успокоительной или демпферной обмоткой, так как она обеспечивает быстрое затухание колебаний ротора, возникающих при переходных режимах работы синхронной машины. Если синхронная машина выполнена с массивными полюсами, то в этих полюсах при пуске и переходных режимах возникают вихревые токи, действие которых эквивалентно действию тока в короткозамкну-тых обмотках. Затухание колебаний ротора при переходных процессах обеспечивается в этом случае вихревыми токами, замыкающимися в массивном роторе.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
 Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжениеUв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжениеUв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
К их недостаткам относятся большая кратность пускового тока, более высокая стоимость по сравнению с реактивными и частично гистерезисными двигателями, значительное снижение момента входа в синхронизм с увеличением момента инерции нагрузки, наличие тормозного (генераторного) момента в процессе пуска двигателя.
зультате взаимодействия поля постоянных магнитов с вращающимся полем статора втягивается в синхронизм.
Синхронизирующие свойства синхронных двигателей характеризуются в основном моментом входа в синхронизм Жвх — максимальным моментом сопротивления нагрузки, при котором двигатель еще втягивается в синхронизм.
Момент входа зависит от крутизны пусковой механической характеристики- М„’ в зоне малых скольжений и от момента выхода из синхронизма МВЫх.
Исследовать синхронизирующие свойства двигателя: а) определить моменты входа в синхронизм УИВХ и выхода из синхронизма Л1ВЫХ при и=И„ и 0,85 Uu’, б) определить моменты входа а синхронизм для двух различных моментов инерции нагрузки (•/Harp ~2.
Рассчитать кратности моментов (начального пускового, выхода из синхронизма и входа в синхронизм) и кратность пускового тока по отношению ‘К номинальным данным: /г„==Л1к/Л1н; kM =
Синхронизирующие свойства СДПМ определяются в основном такими техническими показателями, как момент входа в синхронизм Мвх и момент выхода из синхронизма УИВЫх.
Момент входа определяется максимальным моментом -нагрузки, при котором двигатель еще втягивается в синхронизм; момент выхода — моментом нагрузки, при котором двигатель вы-вадает из синхронизма.
Для этого синхронно работающий двигатель нагружают до выхода из синхронизма (при этом определяется максимальный синхронизирующий момент Мвых).
Основной технический показатель, определяющий синхронизирующие свойства СДПМ, — момент входа в синхронизм.
Что понимается под моментом входа двигателя в синхронизм?
Какие факторы влияют на момент входа двигателя в синхронизм?
Втягивание СРД в синхронизм происходит под действием синхронизирующего момента, который создается за счет разности магнитных проводимостей ротора по продольной и поперечной осям вследствие того, что явно выраженные полюса ротора стремятся расположиться по оси вращающегося поля статора.
Синхронизирующие свойства СРД определяются максимальным моментом нагрузки, при котором двигатель еще втягивается в синхронизм, — моментом входа в синхронизм Мвх.
Момент входа зависит от максимально синхронизирующего ‘момента (момента выхода из синхронизма МВых), момента инерции вращающихся масс /, крутизны пусковой механической характеристики Мп’ и может быть найден из приближенного решения уравнения движения ротора СРД: _____________ где Я=/(ос2/Р — инерционная постоянная вращающихся масс, причем сос = 2я/ — электрическая угловая скорость поля якоря; р — число пар полюсов.
Исследовать синхронизирующие свойства двигателя: а) определить момент входа в синхронизм Л1ВХ и момент выхода из синхронизма Мвых при С=СН\ й=и„ и U = 0,85UH; б) определить моменты входа и выхода при U=UH, С<СН и С>СН.
Рабочие и угловая характеристики двигателя снимаются одновременно при номинальных значениях напряжения питания и емкости конденсатора в диапазоне нагрузок от холостого хода до момента выхода ротора из синхронизма.
Основными техническими показателями СРД, характеризующими его синхронизирующие свойства, являются момент входа в синхронизм и момент выхода из синхронизма, который, кроме того, определяет перегрузочную способность двигателя.
Для этого синхронно работающий двигатель нагружают до выхода из синхронизма, при этом определяют момент выхода.
Момент входа в синхронизм, определяющий синхронизирующие свойства СРД, в значительной мере зависит от напряжения питания.
Объясняется это тем, что момент выхода из синхронизма и крутизна пусковой механической характеристики пропорциональны квадрату питающего напряжения (Л4Вых=?
Для того чтобы нагруженный ротор вошел в синхронизм, синхронизирующие силы должны совершить определенную работу, затрачиваемую на преодоление момента сопротивления нагрузки и увеличение кинетической энергии вращающихся масс.
С возрастанием момента инерции нагрузки кинетическая энергия при синхронной частоте вращения увеличивается и, следовательно, двигатель может втянуть в синхронизм нагрузку с уменьшенным моментом сопротивления.
Дайте определение момента входа в синхронизм и момента выхода из синхронизма.
Так как активное сопротивление ротора велико (SKP>1), то момент максимален при пуске и равен нулю при синхронизме (см.
Преимуществами синхронных гистерезисных двигателей, которые способствовали их быстрому распространению в технике, являются: большой пусковой момент и момент входа в синхронизм, плавность входа в синхронизм — отсутствие рывка, незначительное изменение тока (20—30%) при изменении нагрузки от короткого замыкания (пуск) до холостого хода, сравнительно высокий КПД
Рассчитать кратности момента выхода из синхронизма (до и после подмагничивания) и кратности начального пускового момента и пускового тока kM=-MBMJi/MH; kn=MK/Mn; feiWSK//H
При проведении данного эксперимента необходимо определить начальный пусковой момент Мк — момент при п = 0, момент входа в синхронизм УИвх — максимальный момент, при котором двигатель еще втягивается в синхронизм, и момент выхода из синхронизма Мвых— максимальный момент при синхронной скорости.
При определении рабочих характеристик после подмагничивания необходимо с помощью неоновой лампы следить за тем, чтобы ротор двигателя не выходил из синхронизма, так как даже кратковременный выход ротора из синхронизма приводит к его перемагничива-нию.
При исследовании двигателя после подмагничивания необходимо определить момент выхода из синхронизма и пусковой момент.
При проектировании, производстве и испытании электрических машин возникает необходимость в определении пусковых, максимальных и минимальных моментов у асинхронных и синхронных машин; моментов входа в синхронизм у синхронных машин.
ОПРЕДЕЛЕНИЕ МОМЕНТА ВХОДА В СИНХРОНИЗМ СИНХРОННЫХ ДВИГАТЕЛЕЙ С АСИНХРОННЫМ ПУСКОМ
При расчетах, проектировании и испытаниях синхронных микродвигателей первостепенное значение имеет определение предельного момента нагрузки, при котором происходит надежное втягивание ротора в синхронизм.
входа в синхронизм.
Процесс вхождения ротора синхронного двигателя в синхронизм является переходным электромеханическим процессом и описывает-•ся системой нелинейных дифференциальных уравнений синхронной машины.
Тогда исходным уравнением для исследования процесса вхождения в синхронизм синхронных двигателей <; асинхронным пуском является уравнение движения ротора (абс.
При выполнении этого условия момент входа в синхронизм не зависит от начального угла нагрузки.
5, на момент входа в синхронизм не-явнополюсного синхронного двигателя (а2 = 0).
Исследовать влияние угла сдвига моментно-угловых характеристик (ct = 0; л/4; я/2) на момент входа в синхронизм при Oi=l и а2 = 0,5.
Определить момент входа в синхронизм синхронного реактивного двигателя при а\, равных 0,5; 1,0; 1,5.
В процессе вхождения двигателя в синхронизм угол нагрузки изменяется в широких пределах.
6) является коэффициент предельной нагрузки аЗВх, при котором двигатель еще втягивается в синхронизм.
Исследование влияния коэффициента демпфирования на момент входа в синхронизм проводится для неявнополюсного двигателя.
Определение предельной нагрузки, при которой двигатель ещё втягивается в синхронизм, проводится для трех значений коэффициента демпфирования а\, равных 0,5; 1,0; 1,5.
значений коэффициента а^— (0~\)тм- При этом определяются два граничных значения нагрузки, незначительно отличающихся и удовлетворяющих следующему условию: при меньшей нагрузке двигатель еще втягивается в синхронизм, а при большей — продолжает работать в асинхронном режиме.
За момент входа в синхронизм принимается первое значение нагрузки.
Методика определения предельного коэффициента нагрузки, соответствующего моменту входа в синхронизм, изложена выше.
Методика определения момента входа в синхронизм реактивного двигателя такая же, как в предыдущих опытах.
Этим и объясняется увеличение момента входа двигателя в синхронизм с ростом коэффициента демпфирования.
Теоретически при Мае’->°° или /-»-0 момент входа в синхронизм достигает максимального значения синхронизирующего момента.
Что понимается под моментом входа в синхронизм?
Как зависит момент входа в синхронизм от момента инерции нагрузки?
Исследовать синхронизирующие свойства синхронных двигателей: а) определить моменты входа в синхронизм и выхода из синхронизма СДПМ и СРД; б) исследовать влияние степени возбужденности двигателя на его синхронизирующие свойства.
В процессе вхождения синхронных двигателей в синхронизм при больших моментах инерции нагрузки и малой крутизне пусковой механической характеристики частота вращения ротора может длительно превышать синхронную частоту вращения поля якоря.
Эти характеристики снимаются в диапазоне изменения нагрузки от нуля до момента выхода из синхронизма, Значение нагрузки устанавливается делителем эталонного напряжения.
Затем, уменьшая момент сопротивления, определяют два его значения, незначительно отличающихся и удовлетворяющих следующему условию: при меньшем значении момента нагрузки двигатель втягивается в синхронизм (а>я = шс), а при большем — — продолжает работать в асинхронном режиме (<он<с0о).
Синхронные компенсаторы.Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
23. Пуск синхронных двигателей. U-образные кривые и рабочие характеристики синхронного двигателя. Синхронный компенсатор.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжениеUв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
U – образные характеристики.Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем  , левые ветви – перевозбуждённому двигателю и ёмкостному току.
, левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол  увеличивается
увеличивается  (рис.4.17).
(рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с  , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток  с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы.Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
24. Синхронный компенсатор
Синхронные компенсаторы.Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
25. Синхронные машины специального назначения. Назначение, конструкция, принцип действия, рабочие характеристики реактивного, гистерезисного синхронного двигателей, шагового электродвигателя.
Пуск синхронного двигателя — Студопедия
Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т.е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, т.к. его ротор обладающий определенной инерцией, не может быть в течении одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы:
1. Пуск с помощью вспомогательного двигателя.
2. Асинхронный пуск двигателя.
1. Пуск с помощью вспомогательного двигателя.
Пуск в ход синхронного двигателя с помощью вспомогательного двигателя может быть произведен только без механической нагрузки на его валу, т.е. практически вхолостую. В этом случае на период пуска двигатель временно превращается в синхронный генератор, ротор которого приводится во вращение небольшим вспомогательным двигателем. Статор этого генератора включается параллельно в сеть с соблюдением всех необходимых условий этого соединения. После включения статора в сеть вспомогательный приводной двигатель механически отключается. Этот способ пуска сложен и имеет к тому же вспомогательный двигатель.
2. Асинхронный пуск двигателя.
Наиболее распространенным способом пуска синхронных двигателей является асинхронный пуск, при котором синхронный двигатель на время пуска превращается в асинхронный. Для возможности образования асинхронного пускового момента в пазах полюсных наконечников явнополюсного двигателя помещается пусковая короткозамкнутая обмотка. Эта обмотка состоит из латунных стержней, вставленных в пазы наконечников и соединяемых накоротко с обоих торцов медными кольцами.
При пуске в ход двигателя обмотка статора включается в сеть переменного тока. Обмотка возбуждения (3) на период пуска замыкается на некоторое сопротивление Rг, рис. 45, ключ К находится в положении 2, сопротивление Rг = (8-10)Rв. В начальный момент пуска при S=1, из-за большого числа витков обмотки возбуждения, вращающее магнитное поле статора наведет в обмотке возбуждения ЭДС Ев, которая может достигнуть весьма большого значения и если при пуске не включить обмотку возбуждения на сопротивление Rг произойдет пробой изоляции.
Рис. 45 Рис. 46.
Процесс пуска синхронного двигателя осуществляется в два этапа. При включении обмотки статора (1) в сеть в двигателе образуется вращающее поле, которое наведет в короткозамкнутой обмотке ротора (2) ЭДС. Под действием, которой будет протекать в стержнях ток. В результате взаимодействия вращающего магнитного поля с током в коротко замкнутой обмотке создается вращающий момент, как у асинхронного двигателя. За счет этого момента ротор разгоняется до скольжения близкого к нулю (S=0,05), рис. 46. На этом заканчивается первый этап.
Чтобы ротор двигателя втянулся в синхронизм, необходимо создать в нем магнитное поле включением в обмотку возбуждения (3) постоянного тока (переключив ключ К в положение 1). Так как ротор разогнан до скорости близкой к синхронной, то относительная скорость поля статора и ротора небольшая. Полюса плавно будут находить друг на друга. И после ряда проскальзываний противоположные полюса притянутся, и ротор втянется в синхронизм. После чего ротор будет вращаться с синхронной скоростью, и частота вращения его будет постоянной, рис. 46. На этом заканчивается второй этап пуска.
Пуск синхронного двигателя
Предположим, что обмотка якоря синхронного двигателя подключена к сети трехфазного тока, обмотка возбуждения — к источнику постоянного тока, а ротор неподвижен. МДС обмотки якоря будет создано вращающееся магнитное поле, благодаря взаимодействию которого с проводниками ротора на последний будет действовать момент. Направление момента зависит от положения вращающегося поля относительно ротора и при вращении поля будет изменяться. Сказанное иллюстрируется рис. 11.14, где вращающееся поле якоря условно заменено вращающимся кольцевым магнитом, а ротор — постоянным магнитом. Независимо от числа полюсов синхронного двигателя при частоте сети 50 Гц направление момента, действующего на неподвижный ротор, изменяется 100 раз в секунду. Вследствии большой частоты изменения направления момента и значительной инерционности ротора последний не сможет прийти во вращение.
Если предварительно разогнать ротор до частоты вращения n, близкой к частоте вращения n0поля якоря, а затем подключить обмотку возбуждения к источнику постоянного тока, то под действием момента двигателя частота вращения ротора дополнительно возрастет и наступит равенство: n = n0. Ротор будет вращаться далее синхронно с полем якоря.
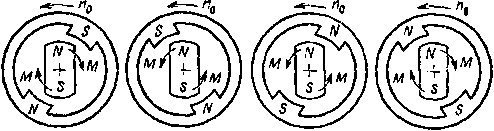
Рис. 11.14. К пояснению пуска синхронного двигателя
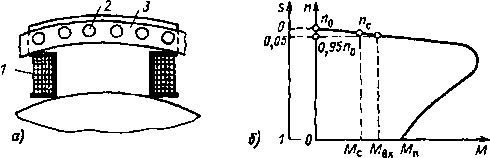
Рис. 11.15. Пусковая обмотка синхронного двигателя с явновыраженными полюсами (а) и его механическая характеристика (б)
Для разгона синхронного двигателя используют так называемый асинхронный пуск синхронного двигателя. С этой целью ротор снабжают кроме обмотки возбуждения 1(рис. 11.15, а) пусковой обмоткой. Последняя состоит из стержней 2, уложенных в пазы полюсных наконечников и замыкаемых с торцевых сторон накоротко сегментами 3. Пусковая обмотка подобна короткозамкнутой обмотке ротора асинхронного двигателя.
Пуск двигателя может быть произведен по схеме, изображенной на рис. 11.8, в следующем порядке. Обмотка ротора с помощью переключателя П замыкается на резистор r1, после чего обмотка якоря подключается к трехфазной сети. Разгон ротора синхронного двигателя, так же как и асинхронного, происходит за счет взаимодействия вращающегося поля якоря и проводников короткозамкнутой (пусковой) обмотки, в которой под действием индуктированных ЭДС возникают токи. Когда ротор разгонится до частоты вращения, близкой к частоте вращения поля якоря, обмотку возбуждения отключают от резистора и подключают к источнику постоянного тока. Для контроля частоты вращения ротора можно использовать амперметр А с нулем посредине шкалы, частота колебаний стрелки которого уменьшается по мере разгона ротора. Обмотку возбуждения подключают к резистору в период разгона ротора для того, чтобы предохранить ее изоляцию от пробоя недопустимо большим напряжением, которое может возникнуть на выводах обмотки при пуске двигателя.
Поскольку синхронный двигатель пускается как асинхронный, он имеет в период пуска свойства асинхронного двигателя, в частности механическую характеристику, изображенную на рис. 11.15, б. Как известно, чтобы можно было произвести пуск двигателя, должно быть выполнено соотношение Мп > Мс. Однако для пуска синхронного двигателя этого оказывается недостаточно. Установлено, что двигатель надежно входит в синхронизм, если подключение обмотки возбуждения к источнику постоянного тока происходит при скольжении s ≤ 0,05 (частота вращения n> 0,95n0). Момент двигателя Мвх, соответствующий s = 0,05, называется входным. Для того чтобы двигатель мог разогнаться до скольжения s ≤ 0,05, должно быть выполнено, очевидно, условие Мвх > Мс.
Соотношения между пусковым, входным и номинальным моментами лежат для различных двигателей примерно в следующих пределах:
Mп/Mном = 0,7 ÷ 2,9; Mвх/Mном = 0,6 ÷ 2,3.
При необходимости ограничения пускового тока или пускового момента синхронного двигателя можно использовать те же способы, что в случае пуска асинхронного двигателя с короткозамкнутым ротором.
90000 Implement Permanent Magnet Synchronous Motor (PMSM) vector control drive 90001 90002 Implement Permanent Magnet Synchronous Motor (PMSM) vector control drive 90003 90004 Library 90005 90006 Simscape / Electrical / Specialized Power Systems / Electric Drives / AC Drives 90003 90008 90009 90010 90011 90006 × 90013 90003 90004 Description 90005 90006 The PM Synchronous Motor Drive (AC6 ) block represents a classical vector control drive for permanent synchronous motors.This drive features a closed-loop speed control based on the vector control method. The speed control loop outputs the reference electromagnetic torque of the machine. The reference direct and quadrature (dq) components of the stator current corresponding to the commanded torque are derived based on vector control strategy. The reference dq components of the stator current are then used to obtain the required gate signals for the inverter through a hysteresis-band current controller.90003 90006 The main advantage of this drive compared to scalar-controlled drives, is its fast dynamic response. The inherent coupling effect between the torque and flux in the machine is managed through decoupling (stator flux orientation) control, which allows the torque and flux to be controlled independently. However, due to its computation complexity, the implementation of this drive requires fast computing processors or DSPs. 90003 90021 Note 90022 90006 In Simscape ™ Electrical ™ Specialized Power Systems software, the PM Synchronous Motor Drive block is commonly called the 90024 AC6 90025 motor drive.90003 90006 90003 90006 The PM Synchronous Motor Drive block uses these blocks from the Electric Drives / Fundamental Drive Blocks library: 90003 90008 90009 90006 Speed Controller (AC) 90003 90010 90009 90006 Vector Controller (PMSM) 90003 90010 90009 90006 DC Bus 90003 90010 90009 90006 Inverter (Three-Phase) 90003 90010 90011 90004 Remarks 90005 90006 The model is discrete. Good simulation results have been obtained with a 2 90052 μ 90053 s time step. To simulate a digital controller device, the control system has two different sampling times: 90003 90006 The speed controller sampling time has to be a multiple of the vector controller sampling time.The latter sampling time has to be a multiple of the simulation time step. The average-value inverter allows the use of bigger simulation time steps since it does not generate small time constants (due to the RC snubbers) inherent to the detailed converter. For a vector controller sampling time of 75 μs, good simulation results have been obtained for a simulation time step of 75 μs. The simulation time step can, of course, not be higher than the vector controller time step. 90003 90006 The stator current direct component 90052 id * 90053 is set to zero inside the vector controller block because the rotor flux is supplied by the permanent magnets.90003 90004 Parameters 90005 90021 General 90022 90065 90066 90067 Output bus mode 90068 90069 90070 90006 Select how the output variables are organized. If you select 90024 Multiple output buses 90025 (default), the block has three separate output buses for motor, converter, and controller variables. If you select 90024 Single output bus 90025, all variables output on a single bus. 90003 90077 90066 90067 Model detail level 90068 90069 90070 90006 Select between the detailed and the average-value inverter.Default is 90024 Detailed 90025. 90003 90077 90066 90067 Mechanical input 90068 90069 90070 90006 Select between the load torque, the motor speed and the mechanical rotational port as mechanical input. Default is 90024 Torque Tm 90025 90003 90006 If you select and apply a load torque, the output is the motor speed according to the following differential equation that describes the mechanical system dynamics: 90003 90006 This mechanical system is included in the motor model.90003 90006 If you select the motor speed as mechanical input, then you get the electromagnetic torque as output, allowing you to represent externally the mechanical system dynamics. The internal mechanical system is not used with this mechanical input selection and the inertia and viscous friction parameters are not displayed. 90003 90006 For the mechanical rotational port, the connection port S counts for the mechanical input and output. It allows a direct connection to the Simscape environment.The mechanical system of the motor is also included in the drive and is based on the same differential equation. 90003 90006 See Mechanical Coupling of Two Motor Drives. 90003 90077 90066 90067 Use signal names as labels 90068 90069 90070 90006 When you select this check box, the 90024 Motor 90025, 90024 Conv 90025, and 90024 Ctrl 90025 measurement outputs use the signal names to identify the bus labels. Select this option for applications that require bus signal labels to have only alphanumeric characters.90003 90006 When this check box is cleared (default), the measurement output uses the signal definition to identify the bus labels. The labels contain nonalphanumeric characters that are incompatible with some Simulink 90122 ® 90123 applications. 90003 90077 90126 90021 Permanent Magnet Synchronous Machine Tab 90022 90006 The 90067 Permanent Magnet Synchronous Machine 90068 tab displays the parameters of the Permanent Magnet Synchronous Machine block of the Fundamental Blocks (Powerlib) library.90003 90021 Converters and DC Bus Tab 90022 90135 Rectifier Section 90136 90006 The 90067 Rectifier 90068 section of the 90067 Converters and DC Bus 90068 tab displays the parameters of the Universal Bridge block of the Fundamental Blocks (powerlib) library. For more information on the Universal Bridge parameters, refer to the Universal Bridge reference page. 90003 90135 DC Bus Section 90136 90065 90066 90067 Capacitance 90068 90069 90070 90006 The DC bus capacitance (F).Default is 90024 2000e-6 90025. 90003 90077 90126 90135 Braking Chopper Section 90136 90065 90066 90067 Resistance 90068 90069 90070 90006 The braking chopper resistance used to avoid bus over-voltage during motor deceleration or when the load torque tends to accelerate the motor (ohms). Default is 90024 8 90025. 90003 90077 90066 90067 Chopper frequency 90068 90069 90070 90006 The braking chopper frequency (Hz). Default is 90024 4000 90025. 90003 90077 90066 90067 Activation voltage 90068 90069 90070 90006 The dynamic braking is activated when the bus voltage reaches the upper limit of the hysteresis band.The following figure illustrates the braking chopper hysteresis logic. Default is 90024 320 90025. 90003 90077 90066 90067 Shutdown voltage 90068 90069 90070 90006 The dynamic braking is shut down when the bus voltage reaches the lower limit of the hysteresis band. Default is 90024 310 90025. The chopper hysteresis logic is shown in the following figure. 90003 90006 90003 90077 90126 90135 Inverter Section 90136 90006 The 90067 Inverter 90068 section of the 90067 Converters and DC Bus 90068 tab displays the parameters of the Universal Bridge block of the Fundamental Blocks (powerlib) library.For more information on the Universal Bridge parameters, refer to the Universal Bridge reference page. 90003 90006 The average-value inverter uses the following parameters. 90003 90065 90066 90067 Source frequency 90068 90069 90070 90006 The frequency of the three-phase voltage source (Hz). Default is 90024 60 90025. 90003 90077 90066 90067 On-state resistance 90068 90069 90070 90006 The on-state resistance of the inverter devices (ohms). Default is 90024 1e-3 90025.90003 90077 90126 90021 Controller Tab 90022 90065 90066 90067 Regulation type 90068 90069 90070 90006 This pop-up menu allows you to choose between speed and torque regulation. Default is 90024 Speed regulation 90025 90003 90077 90066 90067 Modulation type 90068 90069 90070 90006 Select hysteresis or space vector modulation. The default modulation type is 90024 Hysteresis 90025. 90003 90077 90066 90067 Schematic 90068 90069 90070 90006 When you click this button, a diagram illustrating the speed and vector controllers schematics appears.90003 90077 90126 90135 Speed Controller Section 90136 90065 90066 90067 Speed ramps — Acceleration 90068 90069 90070 90006 The maximum change of speed allowed during motor acceleration (rpm / s). An excessively large positive value can cause DC bus under-voltage. This parameter is used in speed regulation mode only. Default is 90024 1000 90025. 90003 90077 90066 90067 Speed ramps — Deceleration 90068 90069 90070 90006 The maximum change of speed allowed during motor deceleration (rpm / s).An excessively large negative value can cause DC bus overvoltage. This parameter is used in speed regulation mode only. Default is 90024 -1000 90025. 90003 90077 90066 90067 Speed cutoff frequency 90068 90069 90070 90006 The speed measurement first-order low-pass filter cutoff frequency (Hz). This parameter is used in speed regulation mode only. Default is 90024 100 90025. 90003 90077 90066 90067 Speed controller sampling time 90068 90069 90070 90006 The speed controller sampling time (s).The sampling time must be a multiple of the simulation time step. Default is 90024 7 * 20e-6 90025. 90003 90077 90066 90067 PI regulator — Proportional gain 90068 90069 90070 90006 The speed controller proportional gain. This parameter is used in speed regulation mode only. Default is 90024 5 90025. 90003 90077 90066 90067 PI regulator — Integral gain 90068 90069 90070 90006 The speed controller integral gain. This parameter is used in speed regulation mode only.Default is 90024 100 90025. 90003 90077 90066 90067 Torque output limits — Negative 90068 90069 90070 90006 The maximum negative demanded torque applied to the motor by the current controller (N.m). Default is 90024 -17.8 90025. 90003 90077 90066 90067 Torque output limits — Positive 90068 90069 90070 90006 The maximum positive demanded torque applied to the motor by the current controller (N.m). Default is 90024 17.8 90025. 90003 90077 90126 90135 Vector Controller Section 90136 90065 90066 90067 Sampling time 90068 90069 90070 90006 The vector controller sampling time (s).The sampling time must be a multiple of the simulation time step. Default is 90024 20e-6 90025. 90003 90077 90066 90067 Current controller hysteresis band 90068 90069 90070 90006 The current hysteresis bandwidth. Default is 90024 0.1 90025. This value is the total bandwidth distributed symmetrically around the current set point (A). The following figure illustrates a case where the current set point is Is 90122 * 90123 and the current hysteresis bandwidth is set to dx.90003 90006 This parameter is not used when using the average-value inverter. 90122 90123 90003 90006 90003 90021 Note 90022 90006 This bandwidth can be exceeded because a fixed-step simulation is used. A rate transition block is needed to transfer data between different sampling rates. This block causes a delay in the gate signals, so the current may exceed the hysteresis band. 90003 90077 90066 90067 Maximum switching frequency 90068 90069 90070 90006 The maximum inverter switching frequency (Hz).Default is 90024 20e3 90025. This parameter is not used when using the average-value inverter. 90003 90077 90066 90067 90067 Show / Hide Autotuning Control 90068 90068 90069 90070 90006 Click to show or hide the parameters of the Autotuning Control tool. 90003 90077 90126 90135 Autotuning of PI loops Section 90136 90065 90066 90067 Desired damping [zeta] 90068 90069 90070 90006 Specify the damping factor used for the calculation of the Kp and Ki gains of the Speed Controller (AC) block.Default is 90024 0.9 90025. 90003 90077 90066 90067 Desired response time @ 5% [Trd (sec)] 90068 90069 90070 90006 Specify the desired settling time of the Speed Controller (AC) block. This is time required for the controller response to reach and stay within a 5 percent range of the target value. Default is 90024 0.1 90025. 90003 90077 90066 90067 Bandwidth ratio (InnerLoop / SpeedLoop) 90068 90069 90070 90006 Specify the ratio between the bandwidth and natural frequency of the regulator.Default is 90024 30 90025. 90003 90077 90066 90067 Calculate PI regulator gains 90068 90069 90070 90006 Compute the 90067 Proportional gain 90068 and 90067 Integral gain 90068 parameters of the Speed Controller (AC) block. The computation is based on the 90067 Desired damping [zeta] 90068, 90067 Desired response time @ 5% 90068, and 90067 Bandwidth ratio (InnerLoop / SpeedLoop) 90068 parameters. The computed values are displayed in the mask of the Drive block.Click 90067 Apply 90068 or 90067 OK 90068 to confirm them. 90003 90077 90126 90004 Block Inputs and Outputs 90005 90065 90066 90024 SP 90025 90069 90070 90006 The speed or torque set point. The speed set point can be a step function, but the speed change rate will follow the acceleration / deceleration ramps. If the load torque and the speed have opposite signs, the accelerating torque will be the sum of the electromagnetic and load torques. 90003 90077 90066 90024 Tm 90025 or 90024 Wm 90025 90069 90070 90006 The mechanical input: load torque (Tm) or motor speed (Wm).90003 90077 90066 90024 A, B, C 90025 90069 90070 90006 The three phase terminals of the motor drive. 90003 90077 90066 90024 Wm 90025 or 90024 Te 90025 90069 90070 90006 The mechanical output: motor speed (Wm) or electromagnetic torque (Te). 90003 90077 90126 90006 When the 90067 Output bus mode 90068 parameter is set to 90067 Multiple output buses 90068, the block has the following three output buses: 90003 90065 90066 90024 Motor 90025 90069 90070 90006 The motor measurement vector.This vector allows you to observe the motor’s variables using the Bus Selector block. 90003 90077 90066 90024 Conv 90025 90069 90070 90006 The three-phase converters measurement vector. This vector contains: 90003 90006 Note that all current and voltage values of the bridges can be visualized with the Multimeter block. 90003 90077 90066 90024 Ctrl 90025 90069 90070 90006 The controller measurement vector. This vector contains: 90003 90077 90126 90006 When the 90067 Output bus mode 90068 parameter is set to 90067 Single output bus 90068, the block groups the Motor, Conv, and Ctrl outputs into a single bus output.90003 90004 Model Specifications 90005 90006 The library contains a 3 hp drive parameter set. The specifications of the 3 hp drive are shown in the following table. 90003 90006 90067 3 HP Drive Specifications 90068 90003 90551 90552 90553 90553 90553 90556 90557 90558 90559 90006 Drive Input Voltage 90003 90562 90563 90564 90565 90558 90567 90568 90567 90006 Amplitude 90003 90568 90567 90006 220 V 90003 90568 90563 90558 90567 90568 90567 90006 Frequency 90003 90568 90567 90006 60 Hz 90003 90568 90563 90558 90591 90006 90067 Motor Nominal Values 90068 90003 90568 90563 90558 90567 90568 90567 90006 Power 90003 90568 90567 90006 3 hp 90003 90568 90563 90558 90567 90568 90567 90006 Speed 90003 90568 90567 90006 1800 90003 90568 90563 90558 90567 90568 90567 90006 Voltage 90003 90568 90567 90006 300 90003 90568 90563 90634 90635 90004 Examples 90005 90006 The 90024 ac6_example 90025 example illustrates an AC6 motor drive simulation with standard load condition.90003 90004 References 90005 90006 [1] Bose, B. K. 90052 Modern Power Electronics and AC Drives 90053. Upper Saddle River, NJ: Prentice-Hall, 2002. 90003 90006 [2] Krause, P. C. 90052 90052 Analysis of Electric Machinery 90053 90053. New York: McGraw-Hill, 1986. 90003 90006 90135 Introduced in R2006a 90136 90003 .90000 Permanent magnet synchronous motor (PMSM) 90001 90002 90003 Field Oriented Control (FOC) is a method of motor control to generate three-phase sinusoidal signals which can easily be controlled in frequency and amplitude in order to minimize the current, which in turn means to maximize the efficiency. The basic idea is to transform three-phase signals into two rotor-fix signals and vice-versa.90004 90003 Feedback on rotor position and rotor speed is required in FOC motor control. The feedback can come from sensorless FOC or from FOC with sensors. 90004 90007 90008 90009 Sensorless FOC 90010 derives the rotor position and rotor speed based on motor modeling, the voltage applied to the motor phases, and the current in the three motor phases. 90011 90008 90009 FOC with sensors 90010 determines the rotor position and rotor speed from rotor sensors, such as Hall sensors or an encoder.90011 90016 90003 Feedback on the phase currents can be measured in the motor phase, in the leg shunt or DC-Link shunt at the low-side MOSFET. 90004 90003 XMC ™ microcontroller family is perfectly suited as a controller for various types of motors, such as Permanent Magnet Synchronous Motors (PMSM), Brushless DC Motors (BLDC), AC Induction Motors (ACIM), servo motors and brushed DC motors. Our free and easy-to-use DAVE ™ Integrated Development Environment (IDE) comes with a large number of pre-defined, configurable and tested software blocks (DAVE ™ APPs) targeting specific applications, enabling rapid prototyping and application development.90004 90003 In this app for XMC1000 software, phase current sensing is expected from the leg shunt or DC-Link shunt. 90004 90003 Multiple Infineon innovations and unique features are included in the sensorless PMSM FOC software, such as: 90004 90007 90008 Optimized FOC (No Inverse Park Transform, lowest cost by eliminating external Op-Amp) 90011 90008 SVM with Pseudo Zero Vectors (PZV), for single shunt current sensing 90011 90008 MET (Maximum Efficiency Tracking) for a smooth transition from V / f open-loop to FOC closed-loop 90011 90008 PLL Estimator, the sensorless feedback mechanism which requires only one motor parameter, stator.90011 90016 .90000 What is a Synchronous Motor? — Definition, Construction, Working & its Features 90001 90002 90003 Definition: 90004 The motor which runs at synchronous speed is known as the synchronous motor. The synchronous speed is the constant speed at which motor generates the electromotive force. The synchronous motor is used for converting the electrical energy into mechanical energy. 90005 90006 Construction of Synchronous Motor 90007 90002 The stator and the rotor are the two main parts of the synchronous motor.The stator becomes stationary, and it carries the armature winding of the motor. 90003 The armature winding is the main winding because of which the EMF induces in the motor 90004. The rotator carry the field windings. The main field flux induces in the rotor. The rotor is designed in two ways, i.e., the salient pole rotor and the non-salient pole rotor. 90005 90002 The synchronous motor uses the salient pole rotor. 90003 The word salient means the poles of the rotor projected towards the armature windings 90004.The rotor of the synchronous motor is made with the laminations of the steel. The laminations reduce the eddy current loss occurs on the winding of the transformer. The salient pole rotor is mostly used for designing the medium and low-speed motor. For obtaining the high-speed cylindrical rotor is used in the motor. 90005 90006 Synchronous Motor Working 90007 90002 The stator and rotor are the two main parts of the synchronous motor. The stator is the stationary part, and the rotor is the rotating part of the machine.The three-phase AC supply is given to the stator of the motor. 90005 90002 The stator and rotor both are excited separately. 90003 The excitation is the process of inducing the magnetic field on the parts of the motor with the help of an electric current. 90004 90005 90002 When the three phase supply is given to the stator, the rotating magnetic field developed between the stator and rotor gap. 90003 The field having moving polarities is known as the rotating magnetic field. 90004 The rotating magnetic field develops only in the polyphase system.Because of the rotating magnetic field, the north and south poles develop on the stator. 90005 90002 The rotor is excited by the DC supply. The DC supply induces the north and south poles on the rotor. As the DC supply remains constant, the flux induces on the rotor remains same. Thus, the flux has fixed polarity. The north pole develops on one end of the rotor, and the south pole develops on another end. 90005 90002 The AC is sinusoidal. The polarity of the wave changes in every half cycle, i.e., the wave remains positive in the first half cycle and becomes negative in the second half cycle. The positive and negative half cycle of the wave develops the north and south pole on the stator respectively. 90005 90002 When the rotor and stator both have the same pole on the same side, they repel each other. If they have opposite poles, they attract each other. This can easily be understood with the help of the figure shown below. 90033 90003 The rotor attracts towards the pole of the stator for the first half cycle of the supply and repulse for the second half cycle.Thus the rotor becomes pulsated only at one place. 90004 This is the reason because of which the synchronous motor is not self-starting. 90005 90002 90038 The prime mover is used for rotating the motor. The prime mover rotates the rotor at their synchronous speed. The synchronous speed is the constant speed of the machine whose value depends on the frequency and the numbers of the pole of the machine. 90005 90002 When the rotor starts rotating at their synchronous speed, the prime mover is disconnected to the motor.And the DC supply is provided to the rotor because of which the north and south pole develops at their ends 90005 90002 90003 The north and south poles of the rotor and the stator interlock each other. Thus, the rotor starts rotating at the speed of the rotating magnetic field. And the motor runs at the synchronous speed. 90004 The speed of the motor can only be changed by changing the frequency of the supply. 90005 90046 Main Features of Synchronous Motor 90047 90048 90049 The speed of the synchronous motor is independent of the load, i.e., the variation of the load does not affect the speed of the motor. 90050 90049 The synchronous motor is not self-starting. The prime mover is used for rotating the motor at their synchronous speed. 90050 90049 The synchronous motor operates both for leading and lagging power factor. 90050 90055 90002 The synchronous motor can also be started with the help of the damper windings. 90005 .90000 Difference between Induction Motor and Synchronous Motor 90001 90002 90003 Difference Between Induction 90004 and 90003 Synchronous Motor 90004 is explained with the help of various factors, like the type of excitation used for the machine. The Speed of the motor, starting and operation, the efficiency of both the motors, its cost, usage, and applications. frequency. 90007 90008 90009 90010 90011 BASIS OF DIFFERENCE 90012 90011 SYNCHRONOUS MOTOR 90012 90011 INDUCTION MOTOR 90012 90017 90018 90019 90010 90021 Type of Excitation 90022 90021 A synchronous motor is a doubly excited machine.90022 90021 An induction motor is a single excited machine. 90022 90017 90010 90021 Supply System 90022 90021 Its armature winding is energized from an AC source and its field winding from a DC source. 90022 90021 Its stator winding is energized from an AC source. 90022 90017 90010 90021 Speed 90022 90021 It always runs at synchronous speed. The speed is independent of load. 90022 90021 If the load increased the speed of the induction motor decreases. It is always less than the synchronous speed.90022 90017 90010 90021 Starting 90022 90021 It is not self starting. It has to be run up to synchronous speed by any means before it can be synchronized to AC supply. 90022 90021 Induction motor has self starting torque. 90022 90017 90010 90021 Operation 90022 90021 A synchronous motor can be operated with lagging and leading power by changing its excitation. 90022 90021 An induction motor operates only at a lagging power factor. At high loads the power factor becomes very poor.90022 90017 90010 90021 Usage 90022 90021 It can be used for power factor correction in addition to supplying torque to drive mechanical loads. 90022 90021 An induction motor is used for driving mechanical loads only. 90022 90017 90010 90021 Efficiency 90022 90021 It is more efficient than an induction motor of the same output and voltage rating. 90022 90021 Its efficiency is lesser than that of the synchronous motor of the same output and the voltage rating. 90022 90017 90010 90021 Cost 90022 90021 A synchronous motor is costlier than an induction motor of the same output and voltage rating 90022 90021 An induction motor is cheaper than the synchronous motor of the same output and voltage rating.90022 90017 90084 90085 90002 An Induction Motor is also known as 90003 Asynchronous Motor 90004. It is so called because it never runs at synchronous speed. i.e., N 90089 s 90090 = 120f / P. The induction motor is most widely used motor in all domestic and commercial motor. The Synchronous motor always follows a synchronous speed. The speed of the rotor is maintained or synchronized with the supply current 90007 90092 Difference between Three Phase Induction Motor and Synchronous Motor 90093 90094 90095 A three phase Synchronous motor is a doubly excited machine, whereas an induction motor is a single excited machine.90096 90095 The armature winding of the Synchronous motor is energized from an AC source and its field winding from a DC source. The stator winding of Induction Motor is energized from an AC source. 90096 90095 Synchronous Motor always runs at synchronous speed, and the speed of the motor is independent of load, but an induction motor always runs less than the synchronous speed. If the load increased the speed of the induction motor decreases. 90096 90095 The induction motor has self-starting torque whereas the synchronous motor is not self starting.It has to be run up to synchronous speed by any means before it can be synchronized to AC supply. 90096 90095 A synchronous motor can be operated with lagging and leading power by changing its excitation. An induction motor operates only at a lagging power factor. At high loads, the power factor of the induction motor becomes very poor. 90096 90095 The Synchronous Motor can be used for power factor correction in addition to the supplying torque to drive mechanical loads whereas an induction motor is used for driving mechanical loads only.90096 90095 The synchronous motor is more efficient than an induction motor of the same output and voltage rating. 90096 90095 A synchronous motor is costlier than an induction motor of the same output and voltage rating. 90096 90111 .