


1.23. Мгновенная угловая скорость
При вращении м. т. (тела) в пределе при t 0 получаем мгновенную угловую скорость
 .
(45)
.
(45)
Мгновенная угловая скорость тела равна первой производной углового перемещения по времени.
Если тело вращается равномерно, то = сonst. Тогда
 (46)
(46)
Угловая скорость в СИ измеряется в радианах в секунду (рад/c).
Вывод: Величина угловой скорости, как и угловое перемещение, характеризуют тело в целом.
Понятия
угловой скорости и углового перемещения
имеют смысл только для тел конечных
размеров. Значение угловой скорости в
науке и технике огромно: она используется,
начиная с объектов микромира до тел
космических масштабов. Например, в
настоящее время установлено, что
гигантские структуры Вселенной –
галактики, включая и нашу спиральную
галактику «Млечный Путь», скопления и
сверхскопления галактик, вращаются
дифференциально, т. е. угловая скорость
гал вращения диска нашей галактики
уменьшается по мере удаления от центра
галактики. Одновременно по диску
галактики пробегает спиральная волна
плотности с постоянной угловой скоростью
1.24. Связь линейной и угловой скоростей
Используя равенство (43), перейдем к пределу при t 0:

При переходе к производным имеем
ds/dt = Rd/dt, но ds/dt = v, d/dt = .
Следовательно,
v = R (47)
1.25. Период и частота вращения
Равномерное вращение тел (например, Земли и других планет вокруг Солнца) характеризуется периодом и частотой вращения.
Период – время, за которое тело совершает полный оборот вокруг оси или полюса (точки). В Си период измеряется в секундах
Если тело совершило полный оборот вокруг оси, то оно повернулось на угол = 2 радиан или 360 0.
Полагая время одного оборота t = Т получаем, что
=  (48)
(48)
Частота f – число оборотов тела в секунду.
В СИ частоту вращения измеряют в с -1 или оборотах в секунду.
Период и частота вращения связаны соотношением
 ,
(49)
,
(49)
где = 2f. (50)
1.26. Среднее угловое ускорение
Из анализа равенства (47) следует, что угловая скорость может изменяться как за счет изменения линейной скорости v при вращении (в этом случае угловая скорость изменяется по величине), так и за счет поворота оси вращения в пространстве. При неравномерном вращении тела вокруг неподвижной оси угловая скорость изменяется только по величине, оставаясь постоянной по направлению.
Если при вращении (R = сonst) за некоторое время t угловая скорость получит приращение , то линейная скорость получит приращение v, т. е.
v = R . (51)
Разделим правую и левую части равенствa (51) на время t, за которое произошло вращение, получим, что
Отношение  (52)
(52)
– называют средним угловым ускорением.
Средним угловым ускорением тела называют отношение изменения угловой скорости к промежутку времени, в течение которого это изменение произошло.
1.27. Мгновенное угловое ускорение
При t 0 в пределе получим абсолютное значение мгновенного углового ускорения:
т. е. мгновенное угловое ускорение численно равно первой производной угловой скорости по времени или – второй производной углового перемещения по времени.
1.28. Связь линейного и углового ускорений
Используя равенство (1.52) и переходя к пределу, получаем
 .
.
Учитывая,
что  ,
так как тангенциальное ускорение,
характеризует изменение скорости только
по величине имеем
,
так как тангенциальное ускорение,
характеризует изменение скорости только
по величине имеем
а = R . (54)
В СИ единицей измерения углового ускорения является радиан на секунду в квадрате (рад/c2 или с-2).
1.29. Связь линейных величин s, V, a c угловыми , ,
Полученные равенства
s = R , v = R , a = R (55)
показывают, что линейные кинематические величины s, v, a, характеризующие движение отдельных точек тела, получаются умножением кинематических угловых величин , , ,
аn = =2 R. (56)
=2 R. (56)
Вследствие
того, что для всех точек тела
= const,
а
 .
(57)
.
(57)
2. Кинематические характеристики вращательного движения вокруг неподвижной оси: угловая скорость, угловое ускорение.
Вопросы к экзамену по физике (ч. I, 2011 г).
Кинематика поступательного движения. Системы отсчета. Траектория, длина пути, перемещение. Скорость и ускорение. Средняя, средняя путевая, мгновенная скорость. Нормальное, тангенциальное и полное ускорение.
Кинематические характеристики вращательного движения вокруг неподвижной оси: угловая скорость, угловое ускорение.
Динамика поступательного движения. Законы Ньютона. (Савельев И.В. Т.1 § 7, 9, 11). Основные физические величины и их размерности. (Савельев И.В. Т.1 § 10). Виды сил в механике. (Савельев И.В. Т.1 § 13–16).
Кинетическая и потенциальная энергия. Механическая работа и мощность. Консервативные и неконсервативные силы. Работа в поле этих сил. Закон сохранения энергии.
Импульс механической системы. Закон сохранения импульса.
Момент силы относительно точки и относительно оси вращения.
Момент импульса материальной точки относительно точки и относительно оси вращения. Момент импульса тела относительно оси. Закон сохранения момента импульса.
Основной закон динамики вращательного движения. Моменты инерции однородных тел правильной геометрической формы. Теорема Штейнера о параллельных осях.
Кинетическая энергия, работа и мощность при вращательном движении. Сопоставление основных формул и законов поступательного и вращательного движения.
Кинематика гармонических колебаний. Величины, характеризующие гармонические колебания: период, частота, амплитуда, фаза. Связь между периодом колебаний и циклической частотой. Зависимости смещения, скорости и ускорения от времени. Соответствующие графики.
Уравнение гармонических колебаний в дифференциальной форме. Зависимость смещения от времени. Связь между циклической частотой и массой колеблющейся точки. Энергия гармонических колебаний (кинетическая, потенциальная и полная). Соответствующие графики.
Математический и физический маятники. Формулы для периода малых колебаний. (Савельев И.В. Т.1 § 54).
Сложение гармонических колебаний одинакового направления и одинаковой частоты. Векторная диаграмма. (Савельев Т.1 § 55).
Затухающие колебания. Уравнение затухающих колебаний в дифференциальной форме. Зависимость смещения и амплитуды затухающих колебаний от времени. Коэффициент затухания. Логарифмический декремент колебаний. (Савельев И.В. Т.1 § 58).
Вынужденные колебания. Уравнение вынужденных колебаний в дифференциальной форме. Смещение, амплитуда и частота вынужденных колебаний. Явление резонанса. График зависимости амплитуды от частоты.
Волны. Распространение волн в упругой среде. Поперечные и продольные волны. Фронт волны и волновые поверхности. Длина волны. Уравнение бегущей волны. (Савельев Т.2 § 93-95).
Образование стоячих волн. Уравнение стоячей волны. Амплитуда стоячей волны. (Савельев И.В. Т.2 § 99)
Два подхода к изучению макросистем: молекулярно-кинетический и термодинамический. Основные параметры макросистем. Уравнение состояния идеального газа (уравнение Клапейрона-Менделеева). (Савельев И.В. Т.1 § 79–81, 86).
Уравнение состояния реального газа (уравнение Ван-дер-Ваальса). Теоретическая изотерма Ван-дер-Ваальса и экспериментальная изотерма реального газа. Критическое состояние вещества. (Савельев И.В. Т.1 § 91, § 123–124).
Внутренняя энергия системы. Внутренняя энергия идеального газа. Два способа изменения внутренней энергии. Количество теплоты. Теплоемкость. Связь удельной и молярной теплоемкостей.
Работа при изменении объема. Первое начало термодинамики. Формула Майера. Применение первого начала термодинамики к изопроцессам идеального газа.
Классическая теория теплоемкости идеального газа. Теорема Больцмана о равномерном распределении энергии по степеням свободы молекулы. Вычисление внутренней энергии идеального газа и его теплоемкостей через число степеней свободы. (Савельев И.В. Т.1 § 97).
Применение первого начала термодинамики к адиабатическому процессу. Уравнение Пуассона. (Савельев И.В. Т.1 § 88).
1. Кинематика поступательного движения. Системы отсчета. Траектория, длина пути, перемещение. Скорость и ускорение. Средняя, средняя путевая, мгновенная скорость. Нормальное, тангенциальное и полное ускорение.
Кинематика поступательного движения
При поступательном движении тела все точки тела движутся одинаково, и, вместо того чтобы рассматривать движение каждой точки тела, можно рассматривать движение только одной его точки.
Основные характеристики движения материальной точки: траектория движения, перемещение точки, пройденный ею путь, координаты, скорость и ускорение.
Линию, по которой движется материальная точка в пространстве, называют траекторией.
Перемещением материальной точки за некоторый промежуток времени называется вектор перемещения ∆r=r-r0, направленный от положения точки в начальный момент времени к ее положению в конечный момент.
Скорость материальной точки представляет собой вектор, характеризующий направление и быстроту перемещения материальной точки относительно тела отсчета. Вектор ускорения характеризует быстроту и направление изменения скорости материальной точки относительно тела отсчета.
Средняя скорость — векторная физическая величина равная отношению вектора перемещения к промежутку времени, за который происходит это перемещение:
 Мгновенная скорость —
векторная физическая величина, равная
первой производной от
радиус-вектора по времени:
Мгновенная скорость —
векторная физическая величина, равная
первой производной от
радиус-вектора по времени:
Мгновенная скорость v есть векторная величина, равная первой производной радиуса — вектора движущейся точки по времени. Так как секущая в пределе совпадает с касательной, то вектор скорости v направлен по касательной к траектории в сторону движения (рисунок 1.2).
По мере уменьшение ∆t путь ∆S все больше будет приближаться к |∆r|, поэтому модуль мгновенной скорости:

Нормальное ускорение – это составляющая вектора ускорения, направленная вдоль нормали к траектории движения в данной точке на траектории движения тела. То есть вектор нормального ускорения перпендикулярен линейной скорости движения (см. рис. 1.10). Нормальное ускорение характеризует изменение скорости по направлению и обозначается буквой аn. Вектор нормального ускорения направлен по радиусу кривизны траектории.
Тангенциальное (касательное) ускорение – это составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке траектории движения. Тангенциальное ускорение характеризует изменение скорости по модулю при криволинейном движении.

Полное ускорение при криволинейном движении складывается из тангенциального и нормального ускорений по правилу сложения векторов и определяется формулой:
(согласно теореме Пифагора для прямоугольно прямоугольника).
Направление полного ускорения также определяется правилом сложения векторов:
а= аτ + аn
Ускорение – это величина, которая характеризует быстроту изменения скорости.
Например, автомобиль, трогаясь с места, увеличивает скорость движения, то есть движется ускоренно. Вначале его скорость равна нулю. Тронувшись с места, автомобиль постепенно разгоняется до какой-то определённой скорости. Если на его пути загорится красный сигнал светофора, то автомобиль остановится. Но остановится он не сразу, а за какое-то время. То есть скорость его будет уменьшаться вплоть до нуля – автомобиль будет двигаться замедленно, пока совсем не остановится. Однако в физике нет термина «замедление». Если тело движется, замедляя скорость, то это тоже будет ускорение тела, только со знаком минус (как вы помните, скорость – это векторная величина).
Среднее ускорение> – это отношение изменения скорости к промежутку времени, за который это изменении произошло. Определить среднее ускорение можно формулой:

где a – вектор ускорения.
Направление
вектора ускорения совпадает с направлением
изменения скорости ΔV = V — V0 (здесь  0 –
это начальная скорость, то есть скорость,
с которой тело начало ускоряться).
0 –
это начальная скорость, то есть скорость,
с которой тело начало ускоряться).
В момент времени t1 (см. рис 1.8) тело имеет скорость V0. В момент времени t2 тело имеет скорость V. Согласно правилу вычитания векторов найдём вектор изменения скорости ΔV = V — V0 Тогда определить ускорение можно так:
 Рис.
1.8. Среднее ускорение.
Рис.
1.8. Среднее ускорение.
В СИ единица ускорения – это 1 метр в секунду за секунду (или метр на секунду в квадрате), то есть

Метр на секунду в квадрате равен ускорению прямолинейно движущейся точки, при котором за одну секунду скорость этой точки увеличивается на 1 м/с. Иными словами, ускорение определяет, насколько изменяется скорость тела за одну секунду. Например, если ускорение равно 5 м/с2, то это означает, что скорость тела каждую секунду увеличивается на 5 м/с.
Можно также ввести среднюю скорость по перемещению, которая будет вектором, равным отношению перемещения ко времени, за которое оно совершено:

Средняя скорость, определённая таким образом, может равняться нулю даже в том случае, если точка (тело) реально двигалась (но в конце промежутка времени вернулась в исходное положение).
Если перемещение происходило по прямой (причём в одном направлении), то средняя путевая скорость равна модулю средней скорости по перемещению.
Движение тел происходит в пространстве и во времени. Поэтому для описания движения материальной точки надо знать, в каких местах пространства эта точка находилась и в какие моменты времени она проходила то или иное положение.
Тело отсчета — произвольно выбранное тело, относительно которого определяется положение остальных тел.
Система отсчета — совокупность системы координат и часов, связанных с телом отсчета.
Наиболее употребительная система координат — декартовая — ортонормированный базис которой образован тремя единичными по модулю и взаимно ортогональными векторами i j k r r r , , , проведенными из начала координат.
Положение произвольной точки M характеризуется радиусом-вектором Rr , соединяющим начало координат O с точкой M . r x i y j z k r r r r = + + , r = r = x2 + y2+ z2 r
Движение материальной точки полностью определено, если декартовы координаты материальной точки заданы в зависимости от времени: x = x(t) y = y(t) z =z(t)
Эти уравнения называются кинематическими уравнениями движения точки. Они эквивалентны одному векторному уравнению движения точки.
Линия, описываемая движущейся материальной точкой (или телом) относительно выбранной системы отсчета называется траекторией. Уравнение траектории можно получить, исключив параметр t из кинематических уравнений. В зависимости от формы траектории движение может быть прямолинейным или криволинейным.
Длиной пути точки называется сумма длин всех участков траектории, пройденных этой точкой за рассматриваемый промежуток времени s = s(t) . Длина пути — скалярная функция времени.
Вектор перемещения r r r0 r r r = — вектор, проведенный из начального положения движущейся точки в положение ее в данный момент времени (приращение радиуса-вектора точки за рассматриваемый промежуток времени).
Линию, по которой движется материальная точка в пространстве, называют траекторией ее движения. Иными словами, траекторией движения называют совокупность всех последовательных положений, занимаемых материальной точкой при ее движении в пространстве.
Одним из основных понятий механики является понятие материальной точки, что означает тело, обладающее массой, размерами которого можно пренебречь при рассмотрении его движения. Движение материальной точки — простейшая задача механики, которая позволит рассмотреть более сложные типы движений.
Перемещение материальной точки происходит в пространстве и изменяется со временем. Реальное пространство трехмерно, и положение материальной точки в любой момент времени полностью определяется тремя числами — ее координатами в выбранной системе отсчета. Число независимых величин, задание которых необходимо для однозначного определения положения тела, называется числом его степеней свободы. В качестве системы координат выберем прямоугольную, или декартову, систему координат. Для описания движения точки, кроме системы координат, необходимо еще иметь устройство, с помощью которого можно измерять различные отрезки времени. Такое устройство назовем часами. Выбранная система координат и связанные с ней часы образуют систему отсчета.
Д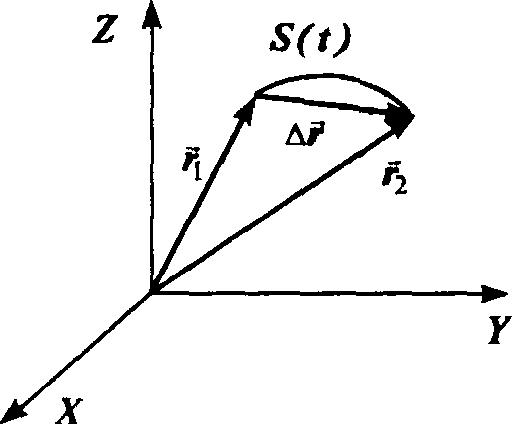 екартовы
координатыX,Y,Z определяют
в пространстве радиус-вектор z,
острие которого описывает при его
изменении со временем траекторию
материальной точки. Длина траектории
точки представляет собой величину
пройденного пути S(t).
Путь S(t)—
скалярная величина. Наряду с величиной
пройденного пути, перемещение точки
характеризуется направлением, в котором
она движется. Разность двух радиус-векторов,
взятых в различные моменты времени,
образует вектор перемещения точки
(рис.).
екартовы
координатыX,Y,Z определяют
в пространстве радиус-вектор z,
острие которого описывает при его
изменении со временем траекторию
материальной точки. Длина траектории
точки представляет собой величину
пройденного пути S(t).
Путь S(t)—
скалярная величина. Наряду с величиной
пройденного пути, перемещение точки
характеризуется направлением, в котором
она движется. Разность двух радиус-векторов,
взятых в различные моменты времени,
образует вектор перемещения точки
(рис.).
Для того чтобы характеризовать, как быстро меняется положение точки в пространстве, пользуются понятием скорости. Под средней скоростью движения по траектории за конечное время t понимают отношение пройденного за это время конечного пути S ко времени:

 . (1.1)
. (1.1)
Скорость движения точки по траектории — скалярная величина. Наряду с ней можно говорить о средней скорости перемещения точки. Эта скорость — величина, направленная вдоль вектора перемещения,
 . (1.2)
. (1.2)
Если моменты времени t1, и t2 бесконечно близки, то время t бесконечно мало и в этом случае обозначается через dt. За время dt точка проходит бесконечно малое расстояние dS. Их отношение образует мгновенную скорость точки
 . (1.3)
. (1.3)
Производная радиус-вектора r по времени определяет мгновенную скорость перемещения точки.
 . (1.4)
. (1.4)
Поскольку перемещение совпадает с бесконечно малым элементом траектории dr = dS, то вектор скорости направлен по касательной к траектории, а его величина:
 . (1.5)
. (1.5)
Н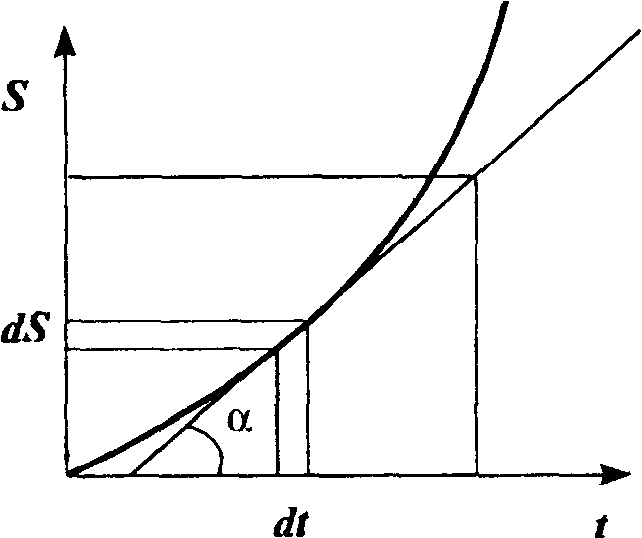 а
рис. показана зависимость пройденного
путиS от
времени t.
Вектор скорости v(t)
направлен по касательной к кривой S(t)
в момент времени t.
Из рис. видно, что угол наклона касательной
к оси t равен
а
рис. показана зависимость пройденного
путиS от
времени t.
Вектор скорости v(t)
направлен по касательной к кривой S(t)
в момент времени t.
Из рис. видно, что угол наклона касательной
к оси t равен
 .
.
Интегрируя выражение (1.5) в интервале времени от t0 до t, получим формулу, позволяющую вычислить путь, пройденный телом за время t—t0 если известна зависимость от времени его скорости v(t)
 . (1.6)
. (1.6)
Г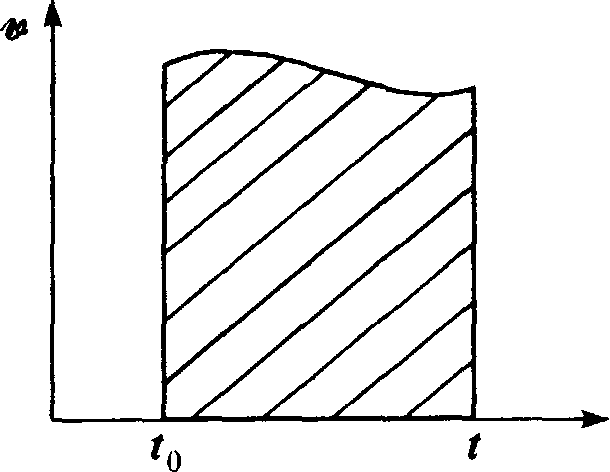 еометрический
смысл этой формулы ясен из рис. По
определению интеграла пройденный путь
представляет собой площадь, ограниченную
кривойv =v(t)
в интервале от t0 до t.В
случае равномерного движения, когда
скорость сохраняет свое постоянное
значение во все время движения, v=const;
отсюда следует выражение
еометрический
смысл этой формулы ясен из рис. По
определению интеграла пройденный путь
представляет собой площадь, ограниченную
кривойv =v(t)
в интервале от t0 до t.В
случае равномерного движения, когда
скорость сохраняет свое постоянное
значение во все время движения, v=const;
отсюда следует выражение
 , (1.7)
, (1.7)
где S0 ‑ путь, пройденный к начальному времени t0.
Производную скорости по времени, которая является второй производной по времени от радиус-вектора, называют ускорением точки:
 . (1.8)
. (1.8)
Вектор ускорения а направлен вдоль вектора приращения скорости dv. Пусть а = const. Этот важный и часто встречаемый случай носит название равноускоренного или равнозамедленного (в зависимости от знака величины а) движения. Проинтегрируем выражение (1.8) в пределах от t = 0 до t:
 (1.9)
(1.9)
 (1.10)
(1.10)
и
используем следующие начальные условия:  .
.
Таким образом, при равноускоренном движении

 . (1.11)
. (1.11)
 В
частности, при одномерном движении,
например вдоль оси X,
В
частности, при одномерном движении,
например вдоль оси X,  .
Случай прямолинейного движения изображен
на рис. При больших временах зависимость
координаты от времени представляет
собой параболу.
.
Случай прямолинейного движения изображен
на рис. При больших временах зависимость
координаты от времени представляет
собой параболу.
В общем случае движение точки может быть
криволинейным. Рассмотрим этот тип
движения. Если траектория точки
произвольная кривая, то скорость и
ускорение точки при ее движении по этой
кривой меняются по величине и направлению.
общем случае движение точки может быть
криволинейным. Рассмотрим этот тип
движения. Если траектория точки
произвольная кривая, то скорость и
ускорение точки при ее движении по этой
кривой меняются по величине и направлению.
Выберем произвольную точку на траектории. Как всякий вектор, вектор ускорения можно представить в виде суммы его составляющих по двум взаимно перпендикулярным осям. В качестве одной из осей возьмем направление касательной в рассматриваемой точке траектории, тогда другой осью окажется направление нормали к кривой в этой же точке. Составляющая ускорения, направленная по касательной к траектории, носит название тангенциального ускорения at, а направленная ей перпендикулярно — нормального ускорения an.
Получим формулы, выражающие величины at, и an через характеристики движения. Для простоты рассмотрим вместо произвольной криволинейной траектории плоскую кривую. Окончательные формулы остаются справедливыми и в общем случае неплоской траектории.
Б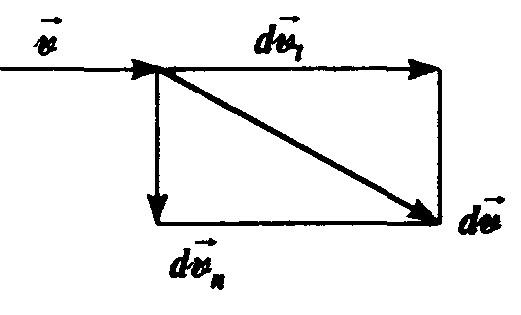
 лагодаря
ускорению скорость точки приобретает
за времяdt малое
изменение dv.
При этом тангенциальное ускорение,
направленное по касательной к траектории,
зависит только от величины скорости,
но не от ее направления. Это изменение
величины скорости равно dv.
Поэтому тангенциальное ускорение может
быть записано как производная по времени
от величины скорости:
лагодаря
ускорению скорость точки приобретает
за времяdt малое
изменение dv.
При этом тангенциальное ускорение,
направленное по касательной к траектории,
зависит только от величины скорости,
но не от ее направления. Это изменение
величины скорости равно dv.
Поэтому тангенциальное ускорение может
быть записано как производная по времени
от величины скорости:
 . (1.12)
. (1.12)
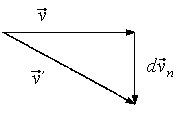
С
другой стороны, изменение dvn,
направленное перпендикулярно к v,
характеризует только изменение
направления вектора скорости, но не
его величины. На рис. показано изменение
вектора скорости, вызванное действием
нормального ускорения. Как видно из
рис.  ,
и, таким образом, с точностью до величины
второго порядка малости величина
скорости остается неизменнойv=v’.
,
и, таким образом, с точностью до величины
второго порядка малости величина
скорости остается неизменнойv=v’.
Найдем величину an. Проще всего это сделать, взяв наиболее простой случай криволинейного движения — равномерное движение по окружности. При этом at=0. Рассмотрим перемещение точки за время dt по дуге dS окружности радиуса R.
С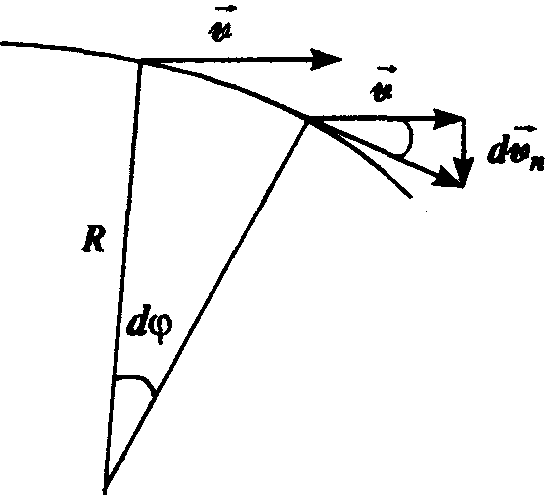 коростиv и v’ ,
как отмечалось, остаются равными по
величине. Изображенные на рис. треугольники
оказываются, таким образом, подобными
(как равнобедренные с равными углами
при вершинах). Из подобия треугольников
следует
коростиv и v’ ,
как отмечалось, остаются равными по
величине. Изображенные на рис. треугольники
оказываются, таким образом, подобными
(как равнобедренные с равными углами
при вершинах). Из подобия треугольников
следует  ,
откуда находим выражение для нормального
ускорения:
,
откуда находим выражение для нормального
ускорения:
 . (1.13)
. (1.13)
Формула для полного ускорения при криволинейном движении имеет вид:
 . (1.14)
. (1.14)
Подчеркнем, что соотношения (1.12), (1.13) и (1.14) справедливы для всякого криволинейного движения, а не только для движения по окружности. Это связано с тем, что всякий участок криволинейной траектории в достаточно малой окрестности точки можно приближенно заменить дугой окружности. Радиус этой окружности, называемый радиусом кривизны траектории, будет меняться от точки к точке и требует специального вычисления. Таким образом, формула (1.14) остается справедливой и в общем случае пространственной кривой.
Движение твердого тела, при котором две его точки О и О‘ остаются неподвижными, называется вращательным движением вокруг неподвижной оси, а неподвижную прямую ОО‘ называют осью вращения. Пусть абсолютно твердое тело вращается вокруг неподвижной оси ОО‘ (рис. 2.12).
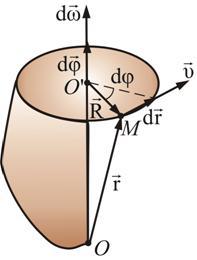 Рис.
2.12
Рис.
2.12
Проследим за
некоторой точкой М этого
твердого тела. За время dt
точка М совершает
элементарное перемещение dr.
При том же самом угле поворота dφ,
другая точка, отстоящая от оси на большее
или меньшее расстояние, совершает
другое перемещение. Следовательно, ни
само перемещение некоторой точки
твердого тела, ни первая производная  ,
ни вторая производная
,
ни вторая производная  не
могут служить характеристикой движения
всего твердого тела.
За это же время dt радиус-вектор R,
проведенный из точки 0‘
в точку М,
повернется на угол dφ.
На такой же угол повернется радиус-вектор
любой другой точки (т.к. тело абсолютно
твердое, в противном случае расстояние
между точками должно измениться).
Угол поворота dφ
характеризует перемещение всего тела
за время dt.
Удобно ввести
не
могут служить характеристикой движения
всего твердого тела.
За это же время dt радиус-вектор R,
проведенный из точки 0‘
в точку М,
повернется на угол dφ.
На такой же угол повернется радиус-вектор
любой другой точки (т.к. тело абсолютно
твердое, в противном случае расстояние
между точками должно измениться).
Угол поворота dφ
характеризует перемещение всего тела
за время dt.
Удобно ввести  –
вектор элементарного поворота тела,
численно равный dφ
и направленный вдоль оси вращения ОО‘
так, чтобы, глядя вдоль вектора, мы
видели вращение по часовой стрелке
(направление вектора
–
вектор элементарного поворота тела,
численно равный dφ
и направленный вдоль оси вращения ОО‘
так, чтобы, глядя вдоль вектора, мы
видели вращение по часовой стрелке
(направление вектора  и
направление вращения связаны «правилом
буравчика»).
Элементарные повороты удовлетворяют
обычному правилу сложения векторов:
и
направление вращения связаны «правилом
буравчика»).
Элементарные повороты удовлетворяют
обычному правилу сложения векторов:
Угловая скорость вращения тела
Угловой
скоростью тела
в данный момент t называется величина,
к которой стремится средняя угловая
скорость  ,
если
,
если  стремится
к нулю.
стремится
к нулю.
Угловая скорость твердого тела является первой производной от угла поворота по времени.
Размерность: [радиан/время]; [1/время]; [1/сек =].
Угловую
скорость можно изображать вектором.
Вектор угловой скорости  направляют
по оси вращения в ту сторону, откуда
вращение видно против хода часовой
стрелки.
направляют
по оси вращения в ту сторону, откуда
вращение видно против хода часовой
стрелки.
Если угловая скорость не является постоянной величиной, то вводят еще одну характеристику вращения — угловое ускорение.
Угловое ускорение характеризует изменение угловой скорости тела с течением времени.
Если
за промежуток времени  угловая
скорость получает приращение
угловая
скорость получает приращение  ,
то среднее угловое ускорение равно
,
то среднее угловое ускорение равно
вращение, — один из простейших видов движения твёрдого тела. В. д. вокруг неподвижной оси — движение, при к-ром все точки тела, двигаясь в параллельных плоскостях, описывают окружности с центрами, лежащими на одной неподвижной прямой, перпендикулярной к плоскостям этих окружностей и наз. осью вращения. Скорость произвольной точки тела v = [w, r], где w — угловая скорость тела, г — радиус-вектор, проведённый в точку из центра описываемой ею окружности.Угловое ускорение тела e = М/I, где М — момент внеш. сил относительно оси вращения, I — момент инерции тела относительно той же оси.
В. д. вокруг неподвижной точки — движение, при к-ром все точки тела движутся по поверхностям концентрич. сфер с центрами в неподвижной точке. В каждый момент времени это движение можно рассматривать как вращение вокруг мгновенной оси вращения, проходящей через неподвижную точку. Скорость произвольной точки тела v = [to, г], здесь г — радиус-вектор, проведённый в точку из неподвижной точки тела. Основной закон динамики: dL/dt = М, где L — момент импульса тела относительно неподвижной точки, М — момент относительно той же точки всех внеш. сил, приложенных к телу, наз. главным моментом внешних сил. Этот закон справедлив также для вращения твёрдого тела вокруг его центра инерции независимо от того, покоится последний или движется произвольно. Теория В. д. имеет многочисл. приложения в небесной механике, внеш. баллистике, теории гироскопа, теории машин и механизмов.
Пройденный путь S , перемещение dr, скорость v , тангенциальное и нормальное ускорение at, и an, представляют собой линейные величины. Для описания криволинейного движения наряду с ними можно пользоваться угловыми величинами.
Рассмотрим более подробно важный и часто встречаемый случай движения по окружности. В этом случае наряду с длиной дуги окружности движение можно характеризовать утлом поворота φ вокруг оси вращения. Величину
 (1.15)
(1.15)
 называют угловой скоростью. Угловая скорость представляет собой
вектор, направление которого связывают
с направлением оси вращения тела (рис.).
называют угловой скоростью. Угловая скорость представляет собой
вектор, направление которого связывают
с направлением оси вращения тела (рис.).
Обратим внимание на то, что, в то время как сам угол поворота φ является скаляром, бесконечно малый поворот dφ — векторная величина, направление которой определяется по правилу правой руки, или буравчика, и связано с осью вращения. Если вращение является равномерным, то ω=const и точка на окружности поворачивается на равные углы вокруг оси вращения за равные времена. Время, за которое она совершает полный оборот, т.е. поворачивается на угол 2π, называется периодом движения Т. Выражение (1.15) можно проинтегрировать в пределах от нуля до Т и получить угловую частоту
 . (1.16)
. (1.16)
Число оборотов в единицу времени есть величина, обратная периоду, — циклическая частота вращения
ν =1/T. (1.17)
Нетрудно получить связь между угловой и линейной скоростью точки. При движении по окружности элемент дуги связан с бесконечно малым поворотом соотношением dS = R·dφ. Подставив его в (1.15), находим
v = ωr. (1.18)
Формула (1.18) связывает величины угловой и линейной скоростей. Соотношение, связывающее векторы ω и v, следует из рис. А именно, вектор линейной скорости представляет собой векторное произведение вектора угловой скорости и радиуса-вектора точки r:
 . (1.19)
. (1.19)
Таким образом, вектор угловой скорости направлен по оси вращения точки и определяется по правилу правой руки или буравчика.
Угловое
ускорение — производная по времени от вектора
угловой скорости ω (соответственно
вторая производная по времени от угла
поворота) 
Выразим тангенциальное и нормальное ускорение через угловые скорости и ускорение. Используя связь (1.18),(1.12) и (1.13), получаем
at = β·R, a =ω2·R. (1.20)
Таким образом, для полного ускорения имеем
 . (1.21)
. (1.21)
Величина β играет роль тангенциального ускорения: если β = 0.полное ускорение при вращении точки не равно нулю, a =R·ω2 ≠ 0.
3. Динамика поступательного движения. Законы Ньютона. (Савельев И.В. Т.1 § 7, 9, 11). Основные физические величины и их размерности. (Савельев И.В. Т.1 § 10). Виды сил в механике. (Савельев И.В. Т.1 § 13–16).
3. Угловое ускорение.
Вращение
с постоянной угловой скоростью  называетсяравномерным. Если угловая
скорость
называетсяравномерным. Если угловая
скорость ,
то тело вращается с угловым ускорением.
,
то тело вращается с угловым ускорением.
Среднее угловое ускорение.
Среднее угловое ускорение – это физическая величина, равная отношению вектора изменения угловой скорости к промежутку времени, за который это изменение произошло:
 .
(2.4)
.
(2.4)
Среднее
угловое ускорение – это вектор,
направление которого совпадает с
направлением  (рис. 2.7).
(рис. 2.7).
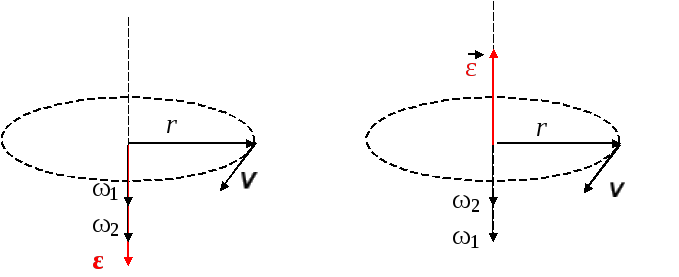
Рис. 2.7
Мгновенное угловое ускорение
Мгновенное
угловое ускорение – это угловое ускорение
вращающегося тела в данный момент
времени. Мгновенное угловое ускорение
– это физическая величина, равная
отношению вектора элементарного
изменения угловой скорости к промежутку
времени, за который это изменение
произошло.Если время движения
бесконечно мало ,
то вектор изменения угловой скорости
,
то вектор изменения угловой скорости ,
значит, мгновенное угловое ускорение
– это предел, к которому стремится
среднее угловое ускорение при
,
значит, мгновенное угловое ускорение
– это предел, к которому стремится
среднее угловое ускорение при :
:
 ;
;  . (2.5)
. (2.5)
Таким
образом, угловым
ускорением называется векторная величина, численно
равная первой производной от угловой
скорости по времени.Вектор углового
ускорения направлен вдоль оси вращения в ту
сторону, что и
направлен вдоль оси вращения в ту
сторону, что и при ускоренном вращении и в противоположную
сторону при замедленном вращении.
при ускоренном вращении и в противоположную
сторону при замедленном вращении.
4. Период и частота вращения.
Вращение
твердого тела с постоянной угловой
скоростью  называетсяравномерным.В этом
случае средняя угловая скорость и мгновенная угловая скорость
имеют одинаковые значения
называетсяравномерным.В этом
случае средняя угловая скорость и мгновенная угловая скорость
имеют одинаковые значения
 , (2.6)
, (2.6)
где  – угол поворота за времяt.
Таким образом, при равномерном вращении
– угол поворота за времяt.
Таким образом, при равномерном вращении  показывает, на какой угол поворачивается
тело в единицу времени.
показывает, на какой угол поворачивается
тело в единицу времени.
Равномерное
вращение можно характеризовать периодом
вращения T.Под периодом понимают время, за которое
тело делает один оборот, т.е. поворачивается
на угол  .Поэтому
.Поэтому
 . (2.7)
. (2.7)
Число оборотов в единицу времени (частота вращения)
 . (2.8)
. (2.8)
Тогда
 . (2.9)
. (2.9)
2.3. Связь между линейными и угловыми характеристиками движения
Рассмотрим
произвольную точку тела М, которая
находится на расстоянииRот оси вращения и вращается с постоянной
угловой скоростью (рис. 2.8). Пусть за время
(рис. 2.8). Пусть за время тело повернулось на угол
тело повернулось на угол ,
а точка прошла путь
,
а точка прошла путь .
.
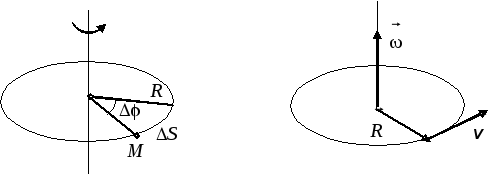
Рис. 2.8
Установим
связь между линейными характеристиками
точки ( )
и угловыми характеристиками тела (
)
и угловыми характеристиками тела ( ).
Длина пути
).
Длина пути и угол поворота
и угол поворота связаны известным соотношением
связаны известным соотношением
 . (2.10)
. (2.10)
Делим
обе части равенства на  и переходим к пределу
и переходим к пределу
 . (2.11)
. (2.11)
Отсюда имеем
 . (2.12)
. (2.12)
Формула
(2.12) связывает модули линейной и угловой
скоростей. Найдем выражение, связывающее
векторы  и
и .
Положение рассматриваемой точки тела
будем определять с помощью вектора
.
Положение рассматриваемой точки тела
будем определять с помощью вектора ,
который проведен в данную точку тела
перпендикулярно к оси вращения.
,
который проведен в данную точку тела
перпендикулярно к оси вращения.
Тогда можем записать формулу для линейной скорости как векторное произведение:
 . (2.13)
. (2.13)
При
этом модуль векторного произведения,
по определению, равен  ),
а направление совпадает с направлением
поступательного движения правого винта
при его вращении от
),
а направление совпадает с направлением
поступательного движения правого винта
при его вращении от к
к .
.
Пусть тело вращается неравномерно. Тангенциальное ускорение точки
 . (2.14)
. (2.14)
Векторы  взаимно перпендикулярны, поэтому можно
записать, что
взаимно перпендикулярны, поэтому можно
записать, что
 . (2.15)
. (2.15)
Модуль
тангенциального ускорения  .
.

Рис. 2.9
Нормальное ускорение точки
 . (2.16)
. (2.16)
Вектор
нормального ускорения направлен по
радиусу к центру окружности – против
вектора  ,
тогда можно записать
,
тогда можно записать
 .(2.17)
.(2.17)
Формулы
(2.14) и (2.16) связывают модули тангенциального
и нормального ускорений точки с угловым
ускорением  и угловой скоростью
и угловой скоростью тела.
тела.
В
заключение сопоставим формулы, которые
связывают кинематические характеристики
твердого тела ( )
с соответствующими формулами
поступательного движения точки.
)
с соответствующими формулами
поступательного движения точки.
Вид движения | Поступательное движение | Вращательное движение |
Равномерное движение |
S
= |
|
Равнопеременное движение | a=const;
|
|
 = const;
= const; t
t
Угловая скорость — это… Что такое Угловая скорость?
 Угловая скорость (синяя стрелка) в полторы единицы по часовой стрелке
Угловая скорость (синяя стрелка) в полторы единицы по часовой стрелке  Угловая скорость (синяя стрелка) в одну единицу против часовой стрелки
Угловая скорость (синяя стрелка) в одну единицу против часовой стрелкиУглова́я ско́рость — векторная физическая величина, характеризующая скорость вращения тела. Вектор угловой скорости по величине равен углу поворота тела в единицу времени:
- ,
а направлен по оси вращения согласно правилу буравчика, то есть, в ту сторону, в которую ввинчивался бы буравчик с правой резьбой, если бы вращался в ту же сторону.
Единица измерения угловой скорости, принятая в системах СИ и СГС — радианы в секунду. (Примечание: радиан, как и любые единицы измерения угла, — физически безразмерен, поэтому физическая размерность угловой скорости — просто [1/секунда]). В технике также используются обороты в секунду, намного реже — градусы в секунду, грады в секунду. Пожалуй, чаще всего в технике используют обороты в минуту — это идёт с тех времён, когда частоту вращения тихоходных паровых машин определяли просто «вручную», подсчитывая число оборотов за единицу времени.
Вектор (мгновенной) скорости любой точки (абсолютно) твердого тела, вращающегося с угловой скоростью , определяется формулой:
где — радиус-вектор к данной точке из начала координат, расположенного на оси вращения тела, а квадратными скобками обозначено векторное произведение. Линейную скорость (совпадающую с модулем вектора скорости) точки на определенном расстоянии (радиусе) от оси вращения можно считать так: Если вместо радианов применять другие единицы углов, то в двух последних формулах появится множитель, не равный единице.
- В случае плоского вращения, то есть когда все векторы скоростей точек тела лежат (всегда) в одной плоскости («плоскости вращения»), угловая скорость тела всегда перпендикулярна этой плоскости, и по сути — если плоскость вращения заведомо известна — может быть заменена скаляром — проекцией на ось, ортогональную плоскости вращения. В этом случае кинематика вращения сильно упрощается, однако в общем случае угловая скорость может менять со временем направление в трехмерном пространстве, и такая упрощенная картина не работает.
- Производная угловой скорости по времени есть угловое ускорение.
- Движение с постоянным вектором угловой скорости называется равномерным вращательным движением (в этом случае угловое ускорение равно нулю).
- Угловая скорость (рассматриваемая как свободный вектор) одинакова во всех инерциальных системах отсчета, однако в разных инерциальных системах отсчета может различаться ось или центр вращения одного и того же конкретного тела в один и тот же момент времени (то есть будет различной «точка приложения» угловой скорости).
- В случае движения одной единственной точки в трехмерном пространстве можно написать выражение для угловой скорости этой точки относительно выбранного начала координат:
- , где — радиус-вектор точки (из начала координат), — скорость этой точки. — векторное произведение, — скалярное произведение векторов. Однако эта формула не определяет угловую скорость однозначно (в случае единственной точки можно подобрать и другие векторы , подходящие по определению, по другому — произвольно — выбрав направление оси вращения), а для общего случая (когда тело включает более одной материальной точки) — эта формула не верна для угловой скорости всего тела (так как дает разные для каждой точки, а при вращении абсолютно твёрдого тела по определению угловая скорость его вращения — единственный вектор). При всём при этом, в двумерном случае (случае плоского вращения) эта формула вполне достаточна, однозначна и корректна, так как в этом частном случае направление оси вращения заведомо однозначно определено.
- При измерении угловой скорости в оборотах в секунду (об/с), модуль угловой скорости равномерного вращательного движения совпадает с частотой вращения f, измеренной в герцах (Гц), то есть в таких единицах . В случае использования обычной физической единицы угловой скорости — радианов в секунду — модуль угловой скорости связан с частотой вращения так: . Наконец, при использовании градусов в секунду связь с частотой вращения будет: .
Связь с конечным поворотом в пространстве
- Пусть поворот, изменяющийся во времени, задан величиной угла и ортом оси конечного поворота в пространстве . Тогда угловая скорость, соответствующая этому повороту, равна
- .
- .
- Если для описания поворота используется кватернион, выражаемый через угол и орт оси поворота как , то угловая скорость находится из выражения .
- .
См. также
Литература
- Лурье А. И. Аналитическая механика\\ А. И. Лурье. — М.: ГИФМЛ, 1961. — С. 100-136