


38.Механическая характеристика асинхронного двигателя
38) Механическая характеристика асинхронного двигателя.
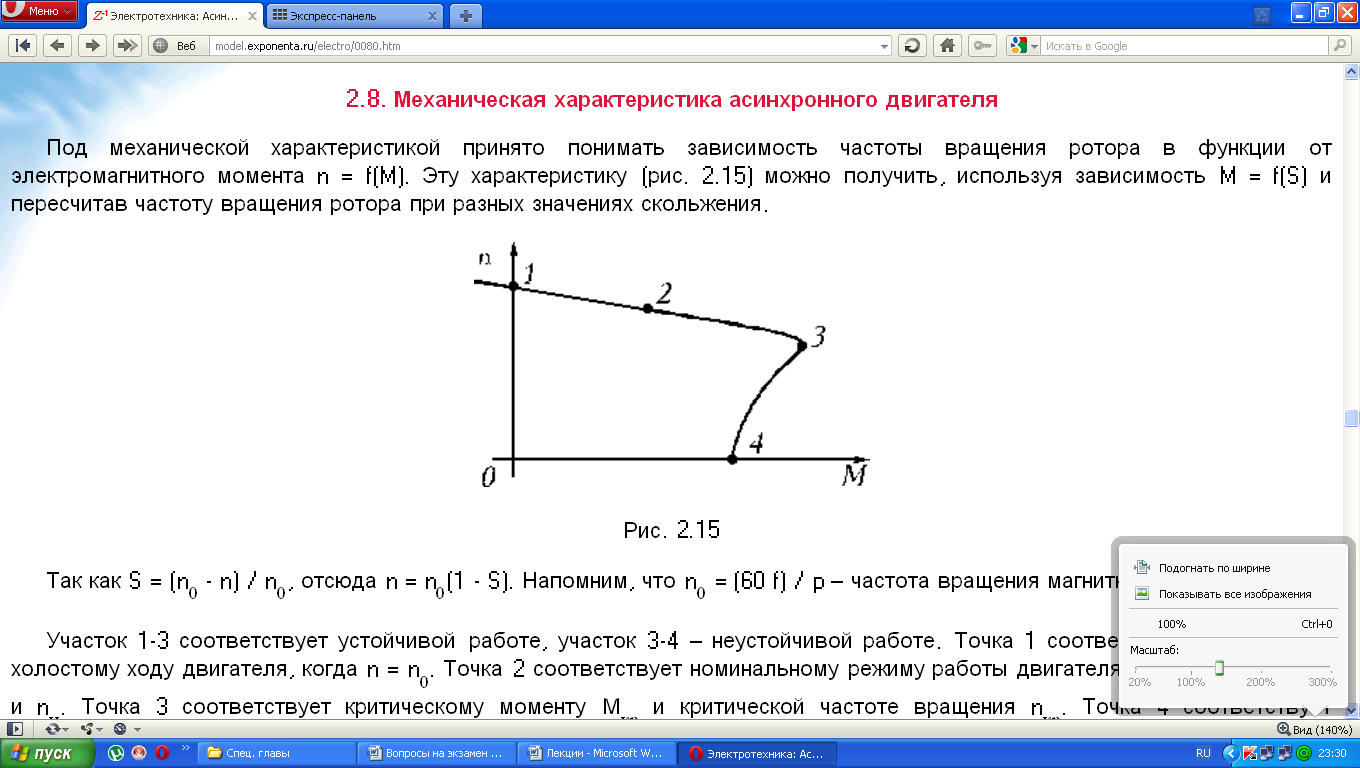
Механическая характеристика. Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
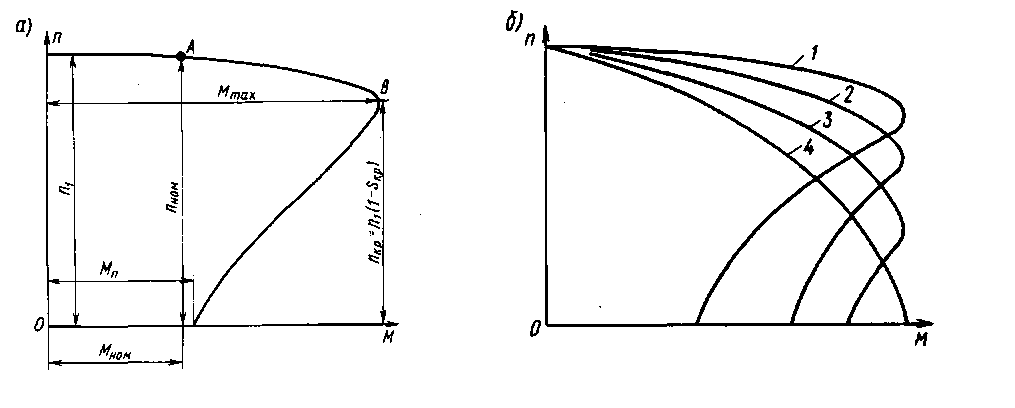
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Двигатель
может устойчиво работать только при
обеспечении саморегулирования, т. е.
автоматическом установлении равновесия
между приложенным к валу моментом
нагрузки Мвн и моментом М, развиваемым двигателем.
Этому условию соответствует верхняя
часть характеристики до достижения
M
При
включении в цепь обмоток ротора пускового
реостата получаем семейство механических
характеристик (рис. 262,б). Характеристика
1 при работе двигателя без пускового
реостата называется естественной.
Характеристики 2, 3 и 4, получаемые при
подключении к обмотке ротора двигателя
реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R
В
двигателе с повышенным пусковым моментом
естественная механическая характеристика
приближается по своей форме к характеристике
двигателя с включенным пусковым
реостатом. Вращающий момент двигателя
с двойной беличьей клеткой равен сумме
двух моментов, создаваемых рабочей и
пусковой клетками. Поэтому характеристику
1 (рис. 263) можно получить путем суммирования
характеристик 2 и 3, создаваемых этими
клетками. Пусковой момент М
НА ВСЯКИЙ СЛУЧАЙ РАБОЧУЮ ХАРАКТЕРИСТИКУ !!!
Рабочие
характеристики. Рабочими
характеристиками асинхронного двигателя
называются зависимости частоты вращения
n (или скольжения s), момента на валу М
Ток статора I1
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos?1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
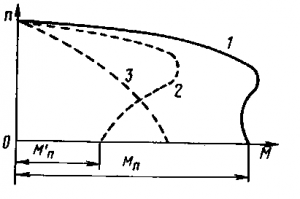 Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
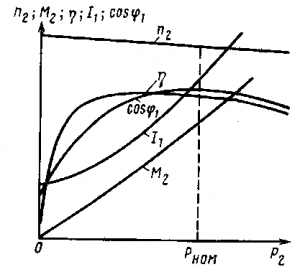 Рис.
264. Рабочие характеристики асинхронного
двигателя
Рис.
264. Рабочие характеристики асинхронного
двигателя
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому
Работа при пониженном напряжении и обрыве одной из фаз. Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На
э. п. с. переменного тока при уменьшении
напряжения в контактной сети соответственно
уменьшается и напряжение в трехфазной
сети, от которой питаются асинхронные
двигатели, приводящие во вращение
вспомогательные машины (вентиляторы,
компрессоры, насосы). Для того чтобы
обеспечить нормальную работу асинхронных
двигателей при пониженном напряжении
(они должны нормально работать при
уменьшении напряжения до 0,75U
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
3
Л 3. Особенности характеристик асинхронных двигателей с короткозамкнутым ротором.
Формирование пусковых характеристик двигателей с фазным ротором проводится путём введения в цепь ротора дополнительного активного сопротивления и уменьшения его по мере разгона двигателя (уменьшения скольжения).
В короткозамкнутых асинхронных двигателях введение дополнительного сопротивления в цепь ротора невозможно. Однако тот же результат может быть получен, если воспользоваться эффектом вытеснения тока на поверхность проводника.
 =
—
=
—  = —L
= —L  = —L 10
= —L 10 

Где L– индуктивность проводника
 —
амплитудное значение тока
—
амплитудное значение тока
Значение
этой ЭДС зависит от значения тока  ,
его частоты и индуктивности, определяемой
характеристикой среды, окружающей
проводник. Если проводник находится на
воздухе, то магнитная проницаемость
среды будет очень мала, следовательно,
мала индуктивностьL. В этом случае изменение частоты 50Гц(
,
его частоты и индуктивности, определяемой
характеристикой среды, окружающей
проводник. Если проводник находится на
воздухе, то магнитная проницаемость
среды будет очень мала, следовательно,
мала индуктивностьL. В этом случае изменение частоты 50Гц( влияние ЭДС самоиндукции незначительно.
Если проводник помещён в тело
магнитопровода, индуктивность многократно
увеличивается и ЭДС самоиндукции,
направленная навстречу тока, играет
роль индуктивного сопротивления,
препятствующего протеканию тока.
влияние ЭДС самоиндукции незначительно.
Если проводник помещён в тело
магнитопровода, индуктивность многократно
увеличивается и ЭДС самоиндукции,
направленная навстречу тока, играет
роль индуктивного сопротивления,
препятствующего протеканию тока.
Рассмотрим проявление действия ЭДС самоиндукции для случая проводника (стержня обмотки ротора), помещённого в глубокий паз магнитопровода ротора двигателя (рис.).
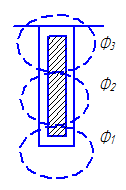
Условно
разделим сечение стержня на три части,
которые соединим параллельно. Ток,
протекающий по нижней части стержня,
образует поток  , магнитные силовые линии которого
замыкаются по магнитопроводу. В этой
части проводника возникает ЭДС
самоиндукции
, магнитные силовые линии которого
замыкаются по магнитопроводу. В этой
части проводника возникает ЭДС
самоиндукции , большого значения, направленная
навстречу току
, большого значения, направленная
навстречу току .
Ток
.
Ток , протекающий по верхней части стержня
роторной обмотки, образует потом
, протекающий по верхней части стержня
роторной обмотки, образует потом , но т.к. силовые линии этого потока в
значительной части своей длины замыкаются
по воздуху, то поток
, но т.к. силовые линии этого потока в
значительной части своей длины замыкаются
по воздуху, то поток будет гораздо меньше потока
будет гораздо меньше потока . Следовательно, ЭДС
. Следовательно, ЭДС будет во много раз меньше, чем
будет во много раз меньше, чем .
.
Указанное
распределение ЭДС самоиндукции по
высоте стрежня характерно для того
режима, при котором частота тока ротора
близка к 50Гц. В этом случае, поскольку
все три части стержня ротора соединены
параллельно (рис.), то ток ротора  пойдёт по верхней части стержня.
пойдёт по верхней части стержня.
Это
явление называют вытеснением тока на
поверхность паза. При этом эффективное
сечение стержня, по которому идёт ток,
будет в несколько раз меньше, чем общее
сечение стержня обмотки ротора.
Таким образом, увеличивается активное
сопротивление ротора  . Поскольку ЭДС самоиндукции зависит
от частоты тока (т.е. от скольжения), то
и сопротивление
. Поскольку ЭДС самоиндукции зависит
от частоты тока (т.е. от скольжения), то
и сопротивление и
и являются функциями скольжения.
являются функциями скольжения.
При
пуске, когда скольжение велико(S=1),
сопротивление увеличивается (в цепь ротора как бы
вводится добавочный резистор). По мере
разгона двигателя скольжение двигателя
уменьшается, эффект вытеснения тока
ослабевает, появляется сначала ток
увеличивается (в цепь ротора как бы
вводится добавочный резистор). По мере
разгона двигателя скольжение двигателя
уменьшается, эффект вытеснения тока
ослабевает, появляется сначала ток , затем
, затем , т.е. ток начинает распространятся вниз
по сечению проводника, сопротивление
, т.е. ток начинает распространятся вниз
по сечению проводника, сопротивление уменьшается. При достижении рабочей
скорости частота тока настолько мала,
что явление вытеснения тока уже не
сказывается, ток протекает по всему
сечению проводника и сопротивление
уменьшается. При достижении рабочей
скорости частота тока настолько мала,
что явление вытеснения тока уже не
сказывается, ток протекает по всему
сечению проводника и сопротивление минимально. Благодаря такому автоматическому
изменению сопротивления
минимально. Благодаря такому автоматическому
изменению сопротивления асинхронных короткозамкнутых двигателей
протекает благоприятно: пусковой ток
составляет 5.0-6.0 номинального, а пусковой
момент 1.1-1.3 номинального.
асинхронных короткозамкнутых двигателей
протекает благоприятно: пусковой ток
составляет 5.0-6.0 номинального, а пусковой
момент 1.1-1.3 номинального.
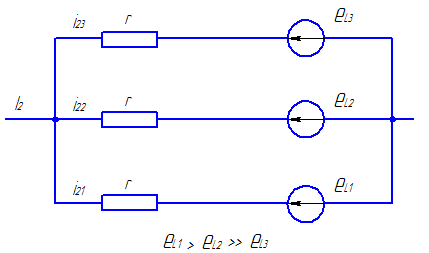
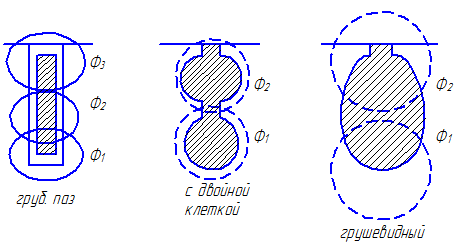
Варьировать параметры пусковой характеристики асинхронного двигателя при конструировании можно, меняя форму паза, а также сопротивление материала стержней (состав сплава).
Наряду с глубокими пазами применяют двойные пазы, образующие двойную “беличью клетку”, пазы грушевидной формы
На рисунке представлены примерные механические характеристики для серий асинхронных короткозамкнутых двигателей.
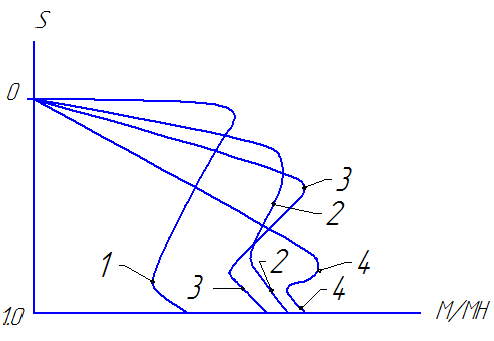
1 — нормального исполнения
2 — с повышенным пусковым моментом
3 — с повышенным скольжением
4 — краново-металлургических серий
Короткозамкнутый
двигатель нормального исполнения
используют для привода широкого класса
рабочих машин и механизмов, прежде всего
для приводов, работающих в длительном
режиме. Для этого исполнения характерны
высокий КПД и минимальное номинальное
скольжение. Механическая характеристика
в области больших скольжений имеет
обычно небольшой провал, характеризуемый
минимальным моментом  .
.
Двигатели с повышенным скольжением имеют более “мягкую” механическую характеристику и используются, когда два или более двигателей работают на общий вал (для кривошипно-шатунных механизмов) с циклически изменяющейся нагрузкой, когда для преодоления сопротивления движению целесообразно использовать кинетическую энергию, запасаемую в движущихся частях электропривода для механизмов, работающих в повторно-кратковременном режиме.
Двигатели с повышенным пусковым моментом предназначены для механизмов с тяжёлыми условиями пуска (скребковые конвейеры). Двигатели краново-металлургических серий предназначены для механизмов, работающих в повторно-кратковременном режиме с частыми пусками. Эти двигатели имеют большую перегрузочную способность, высокий пусковой момент, чем у двигателей нормального исполнения.
Приближённо
механическую характеристику
короткозамкнутого двигателя можно
построить по четырём точкам: при холостом
ходе (S=0), при максимальном ( ),
пусковом (
),
пусковом ( )
и минимальном (
)
и минимальном ( )
моментах. Данные этих характерных точек
приводятся в каталогах и справочниках
для асинхронных двигателей. Расчёт
рабочей части технической характеристики
(S=0 доSk)
можно проводить по формуле (5) или если
пренебречьr1 (для
двигателей мощности более 15кВт)
)
моментах. Данные этих характерных точек
приводятся в каталогах и справочниках
для асинхронных двигателей. Расчёт
рабочей части технической характеристики
(S=0 доSk)
можно проводить по формуле (5) или если
пренебречьr1 (для
двигателей мощности более 15кВт)

 или
или  =
= (
( )
)
Где  — номинальное скольжение или
— номинальное скольжение или
Л 4-5. Регулирование координат электропривода.
При управлении движением исполнительных органов технологических установок с помощью электропривода обеспечивается регулирование одной или нескольких координат движения, главная из которых (основная выходная величина) – это угловая скорость на выходе ЭП, т.к. от её значения прямопропорционально зависит производительность технологических установок. Другие координаты чаще вспомогательные – это вращающий момент электродвигателя, ускорения, путь… Процесс принудительного изменения или поддержания на заданном уровне угловой скорости ЭП при изменяющихся внешних воздействиях называют регулированием угловой скорости.
Способы регулирования угловой скорости ЭП.
Регулирование возможно механическими и электрическими способами.
Механические способырегулирования заключаются в изменении угловой или линейной скорости исполнительных органов изменением передаточного числа устройства механической передачи (редуктора), путём применения различных коробок перемены передач, механических вариаторов.
Электрические способырегулирования заключаются в изменении угловой скорости ЭП с помощью устройства управления посредством преобразовательного и передаточного устройств. Энергетические способы прогрессивней, т.к. снижают металлоёмкость технологических установок, компактность, надёжность с повышением уровня автоматизации и качества управления техническими процессами.
Показатели.Основные показатели, характеризующие процесс регулирования угловой скорости ЭП:
диапазон регулирования,
плавность регулирования,
стабильность заданной угловой скорости,
направления регулирования,
допустимая нагрузка на разных угловых скоростях и экономичность регулирования.
Диапазон
регулированияугловой скорости
определяется отношением максимально
возможной угловой скорости ЭП к минимальной
к минимальной при допустимых пределах её колебания
с изменением нагрузки:D=
при допустимых пределах её колебания
с изменением нагрузки:D= Обычно выражается как 2/1, 10/1, 100/1
Обычно выражается как 2/1, 10/1, 100/1
Плавность
регулированияугловой скорости
характеризуется отношением двух
ближайших соседних угловых скоростей и
и при переменной нагрузке ЭП и численно
оценивается коэффициентом плавности
регулирования
при переменной нагрузке ЭП и численно
оценивается коэффициентом плавности
регулирования =
= .
При плавном регулировании частоты
вращения ЭП этот коэффициент изменяется
к единице.
.
При плавном регулировании частоты
вращения ЭП этот коэффициент изменяется
к единице.
Стабильность
угловой скорости ЭП определяется
жёсткостью механической характеристики
электродвигателя и диапазоном изменения
нагрузки на его валу. Чем больше жёсткая
механическая характеристика двигателя
и меньший диапазон колебания нагрузки
на его валу, тем стабильнее угловая
скорость ЭП, которая численно оценивается
её отклонением от заданного значения, При абсолютно
жёсткой характеристике механической
– синхронного двигателя и допустимых
нагрузках ЭП значение
от заданного значения, При абсолютно
жёсткой характеристике механической
– синхронного двигателя и допустимых
нагрузках ЭП значение
Направление
регулирования угловой скорости
ЭП, т.е. увеличение или уменьшение её по
отношению к номинальной ,
зависит от принятого способа регулирования.
Направленный ввод добавочных сопротивлений
в силовой цепи электродвигателя, понижает
жесткость их механических характеристик,
и их угловая скорость при наличии
нагрузки на валу понижается. С другой
стороны уменьшение тока возбуждения и
соответственно уменьшения магнитного
потока ДПТ приводящий к увеличению
угловой скорости.
,
зависит от принятого способа регулирования.
Направленный ввод добавочных сопротивлений
в силовой цепи электродвигателя, понижает
жесткость их механических характеристик,
и их угловая скорость при наличии
нагрузки на валу понижается. С другой
стороны уменьшение тока возбуждения и
соответственно уменьшения магнитного
потока ДПТ приводящий к увеличению
угловой скорости.
Допустимая нагрузкана валу ЭД при разных угловых скоростях его вращения определяется принятым способом регулирования скорости ЭП. Выделяют регулирование при постоянном моменте М=constи при постоянной мощности Р=const. Регулирование скорости ЭП при постоянном моменте М=constцелесообразно для производственных механизмов, создающих на валу ЭД постоянный момент нагрузки, независящий от угловой скорости механизма. Это все грузоподъемные и большинство транспортирующих механизмов,
Регулирование угловой скорости ЭП при постоянной мощности Р. = constнаиболее оправданно для ЭП главного привода металлорежущих станков. В этих случаях изменением угловой скорости ЭП сила тока ЭД при всех угловых скоростях остается практически неизменной.
Экономичность
регулированияугловой скорости ЭП
определяется средними значениями
энергетических показателей
 , рассчитанными за определенный период
работы ЭП с данными угловыми скоростями.
, рассчитанными за определенный период
работы ЭП с данными угловыми скоростями.
 =
=
Где  и
и  — соответственно полезная (на выходном
валу) и потребляемая из сети активная
мощность ЭП наi– и ступени
регулирования, Вт
— соответственно полезная (на выходном
валу) и потребляемая из сети активная
мощность ЭП наi– и ступени
регулирования, Вт
 —
потеря активной мощности на регулирование
угловой скорости при работе ЭП i– и ступени регулирования, Вт.
—
потеря активной мощности на регулирование
угловой скорости при работе ЭП i– и ступени регулирования, Вт.
 –продолжительность
работы на i– и ступени
регулирования, с
–продолжительность
работы на i– и ступени
регулирования, с
 –потребляемая
из сети активная мощность на i– и ступени регулирования, вар.
–потребляемая
из сети активная мощность на i– и ступени регулирования, вар.
Любой процесс электрического регулирования координат ЭП всегда связан с получением искусственных (регулировочных) характеристик двигателя ЭП. Этого достигают на уровне разомкнутых либо замкнутых систем регулируемого ЭП.
Разомкнутые системы регулируемого ЭП.
Разомкнутая система регулируемого ЭП характеризуется тем что на ее вход не подается информация о текущем состоянии выходной величины (например, угловой скорости).

Функциональная схема разомкнутой системой регулируемого ЭП
 –сигнал
управления, yy– устройство
управления, Прб – преобразователь.
–сигнал
управления, yy– устройство
управления, Прб – преобразователь.
Поэтому все внешние возмущения в виде, например, изменения момента нагрузки, напряжения питания влияют на выходную координату ЭП, снижая тем самым стабильность её поддержания. По этой причине разомкнутые системы регулируемого ЭП, отличаясь простотой реализацией нашли в основном применение для обеспечения автоматического пуска, то торможения или реверса ЭП, а также в тех случаях, когда не предъявляют повышенные тех. требования к стабильности выходной координаты ЭП.
В разомкнутых системах регулируемого ЭП механическая характеристика и приводные свойства ЭП полностью определяются типом используемого ЭД и принятыми для него параметрами регулирования.
Так для асинхронного ЭП такие параметры (способы) взаимодействия на угловую скорость двигателя – эта частота напряжения (тока) питания, число полюсов обмотки статора, скольжение.
Способ частотного регулирования.
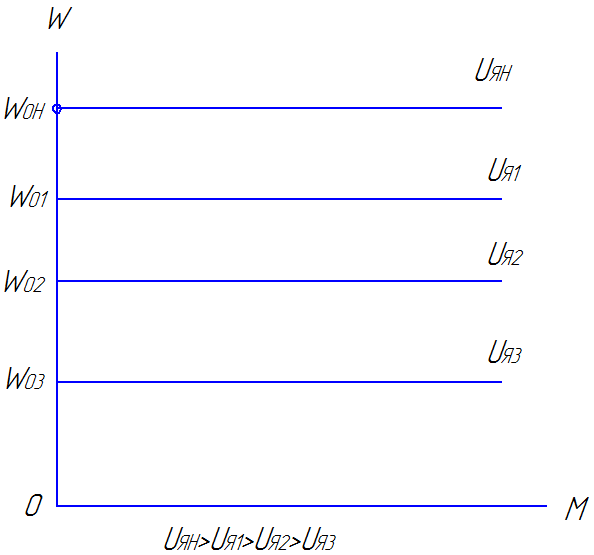
Этот способ экономичный, обеспечивает плавное регулирование частоты вращения (угловой скорости) в широком диапазоне с высокой стабильностью даже в разомкнутых системах из-за высокой жёсткости механической характеристики АД в её рабочей части. При частотном регулировании в состав асинхронного ЭП входит управляемый преобразователь частоты, который обеспечивает заданное изменение частоты и соответствующий этой частоте уровень питающего напряжения АД. Изменять значение напряжения питания АД при изменении частоты необходимо, т.к. значение индуктивного сопротивления двигателя, а значит, и его ток зависят от частоты. При этом для сохранения неизменной перегрузочной способности двигателя (Мк/Мс= const) и высоких энергетических показателей на всех частотах вращения. Закон частотного регулирования АД, предложенный академиком М.П.Костенко, записывают ввиде соотношения:
Где  ,
, ,
, номинальное значение напряжения, частоты
и момента статической нагрузки на валу
АД при номинальной частоте вращения.
номинальное значение напряжения, частоты
и момента статической нагрузки на валу
АД при номинальной частоте вращения.
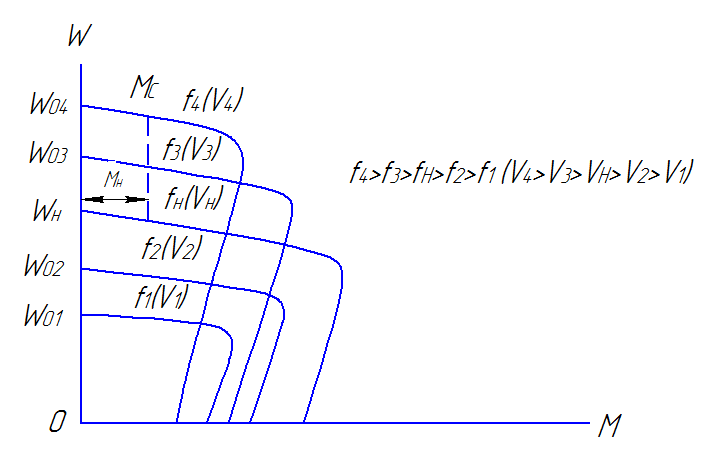
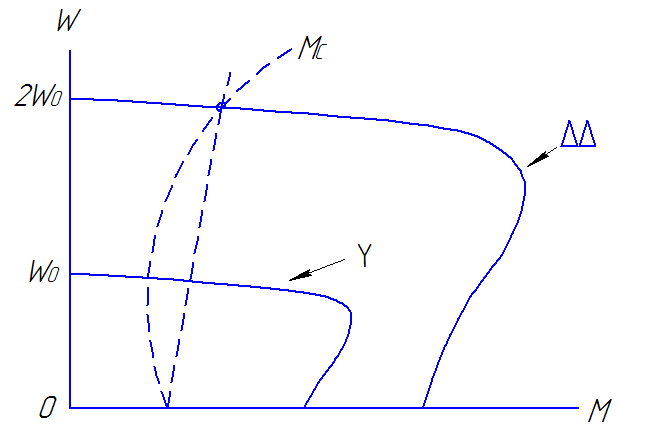
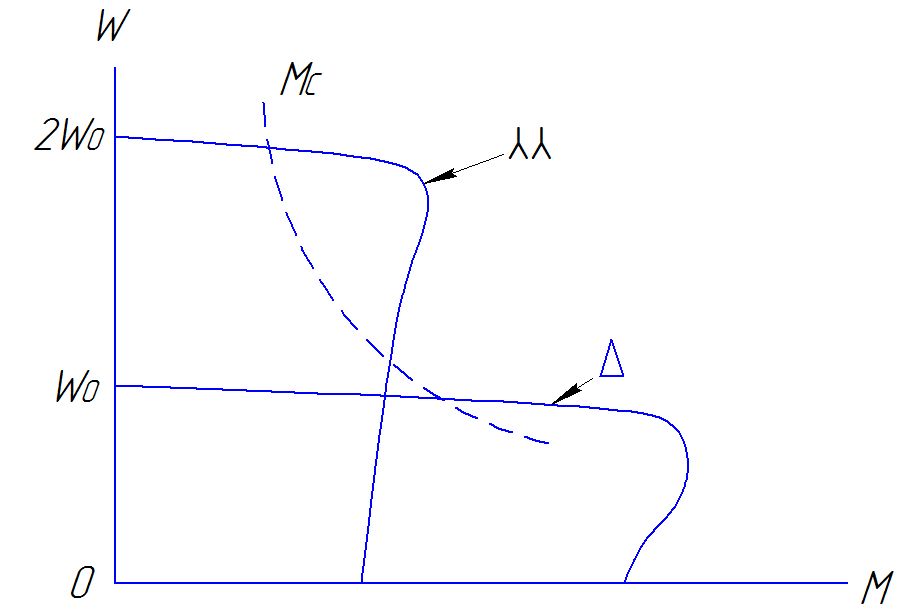
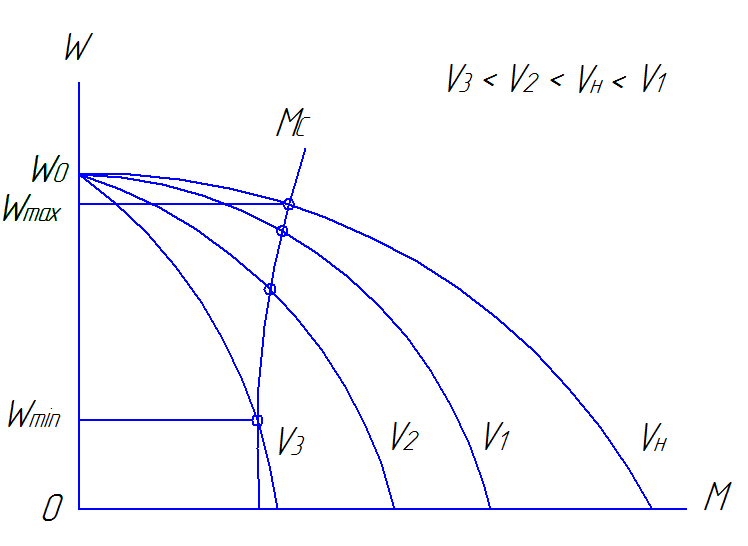
U,f,Mc– те же значения, но при частоте вращения АД, отличной от номинального на рис. Представлены механические характеристики при регулировании по указанному закону частотно регулируемого асинхронного ЭП.
Частотное регулирование угловой скорости
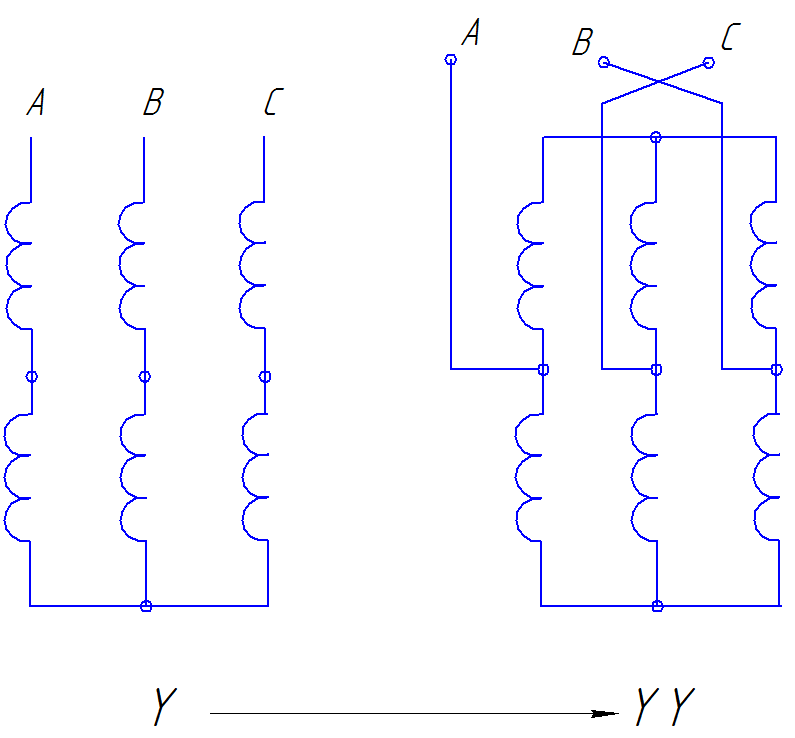
Способ поточного переключения.
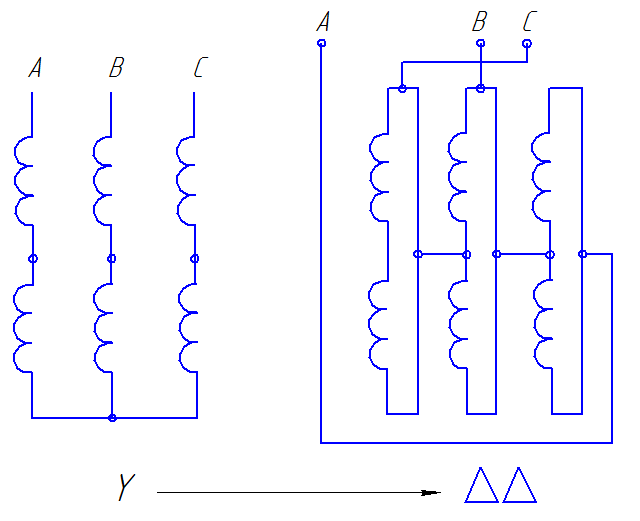
Способ поточного переключения обмотки статора используется в многоскоростных АД, которые имеют обмотку статора с изменяемым числом полюсов. Регулирование, как и частотное, экономичное, его широко применяют для ступенчатого изменения частоты вращения (угловой скорости) АД с КЗ ротора. Так как количество пар полюсов АД может быть равным только по целому числу 1, 2, 3 и т.д., то данный способ обеспечивает только ступенчатое регулирование частоты вращения асинхронного ЭП. Чаще всего изменение
числа пар юсов обмотки статора АД получают путём изменения схемы обмотки. Для этого каждая фаза обмотки статора разделена на несколько секций и имеет от них соответствующее число видов. Изменяя схему соединения этих секций статорной обмотки во всех фазах, добиваются различных частот вращения магнитного поля статора, а соответственно и часто вращения ротора АД.
На рисунке показан принцип изменения числа пар полюсов. На примере одной фазы двухскоростного АД.
Стрелками показано условное направление протекания токов в секциях обмотки, а кружками – соответствующее направление магнитных силовых линий в соответствии с правилом “буравчика”.
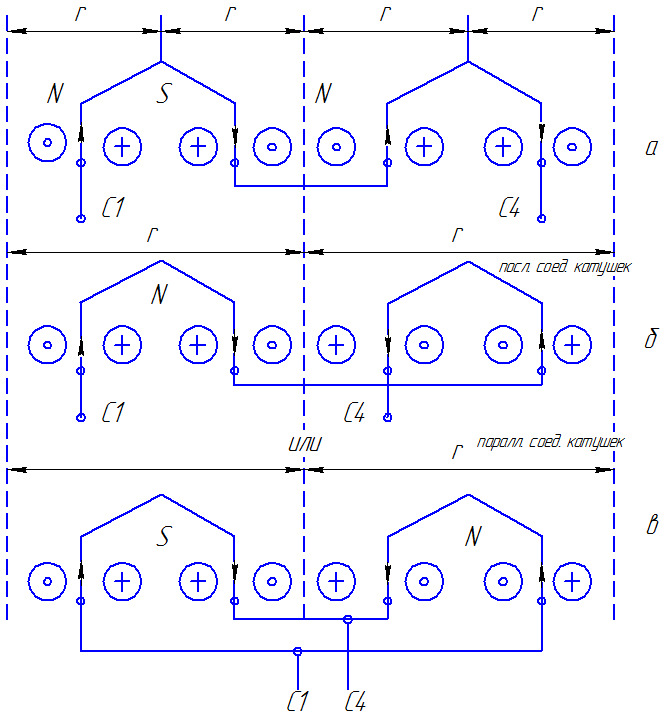
В
двух скоростном АД каждая фаза обмотки
статора состоит из двух одинаковых
секций (катушечных групп). Если секции
соединить последовательно, то образуется
максимальное число пар полюсов, условно
равная 2р, которому соответствует угловая
скорость магнитного поля  (а). При соединении этих же секций встречно
последовательно (б) или параллельно (в)
количество пар полюсов уменьшается в
двое и равно р, а синхронная угловая
скорость увеличивается в 2 раза (2
(а). При соединении этих же секций встречно
последовательно (б) или параллельно (в)
количество пар полюсов уменьшается в
двое и равно р, а синхронная угловая
скорость увеличивается в 2 раза (2 ).
).
Наиболее распространенные и целесообразные схемы переключения статорной обмотки двух скоростных АД для основных видов нагрузки ЭП показаны на рисунке
Т.к.
P=M то
т.к
то
т.к в 2р М
в 2р М 2р
нагрузка вентиляторная или линейная
2р
нагрузка вентиляторная или линейная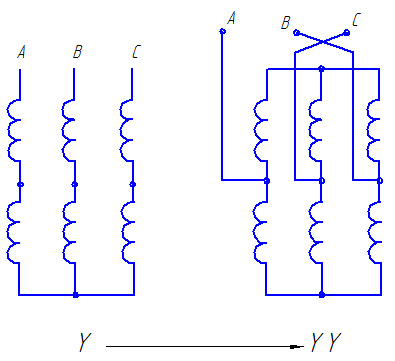
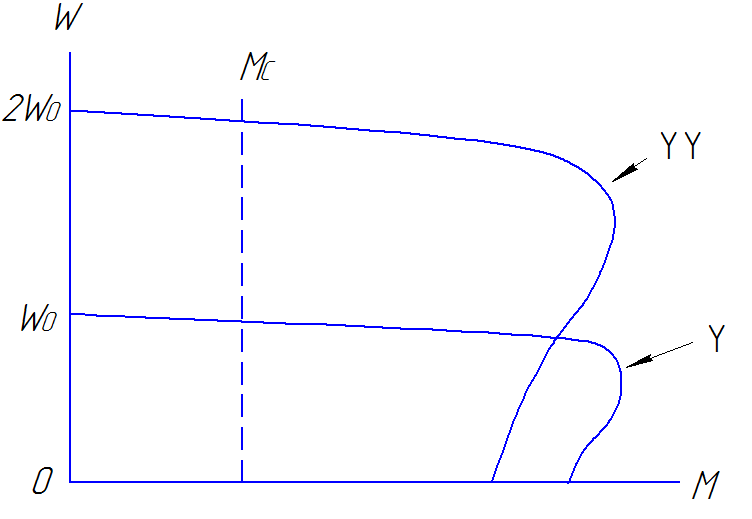

Переключение для главного привода металлорежущих станков


Существенный недостаток многоскоростных АД помимо ступенчатого регулирования угловой скорости – повышенная сложность обмотки статора и сложность ее подключения и коммутации. Например, даже у двух скоростных АД количество выводов обмотки статоров равно 12 , у четырех скоростных – 24 .
Способ изменения скольжения
Изменением скольжения можно регулировать частоту вращения асинхронного ЭП, если на валу двигателя имеется нагрузка и АД обладает мягкой механической характеристикой.
Наиболее доступно этот способ реализуется при использовании АД с фазным ротором путем изменения сопротивления трех фазного реостата, включенного во внешнюю цепь обмотки ротора.
Механическая характеристика
Для АД с КЗ ротором регулирования угловой скорости изменением скольжения регулируется в случае применения специальных АД с мягкой механической характеристикой путем регулирования напряжения питания двигателя.
Способ регулирования частоты вращения АД изменением скольжения характеризуется повышенными потерями мощности, т.к. с увеличением скольжения S растут потери мощности Рэл2 обмотки ротора АД, вызывая ее дополнительный нагрев

 –момент
нагрузки на валу АД Нм
–момент
нагрузки на валу АД Нм
 -угловая
скорость магнитного поля статор рад/с
-угловая
скорость магнитного поля статор рад/с
При
глубоком регулировании потери мощности
в цепи ротора АД становятся преобладающими
и КПД двигателя  практически полностью определяется
скольжением
практически полностью определяется
скольжением

Вместе с тем, данный способ нашел широкое применение в виду доступности и высокой плавности регулирования прежде всего для асинхронных ЭП с вентиляторной нагрузкой. В этом случае с понижением угловой скорости (с увеличением скольжения) существенно уменьшается и момент нагрузки на валу АД, чем обеспечивается достаточное постоянство потерь мощности в роторе и более полное использование АД по нагреву на всех частотах вращения. Диапазон регулирования до 10 :1 и соответственно в таком же диапазоне достигается плавное изменение производительности технологических установок (вентилятора).
Регулирование угловой скорости для ЭП с коллекторными двигателями (ДПТ)
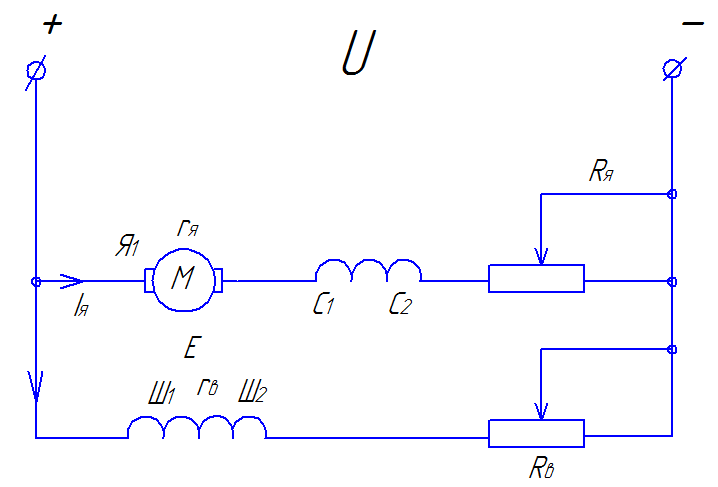
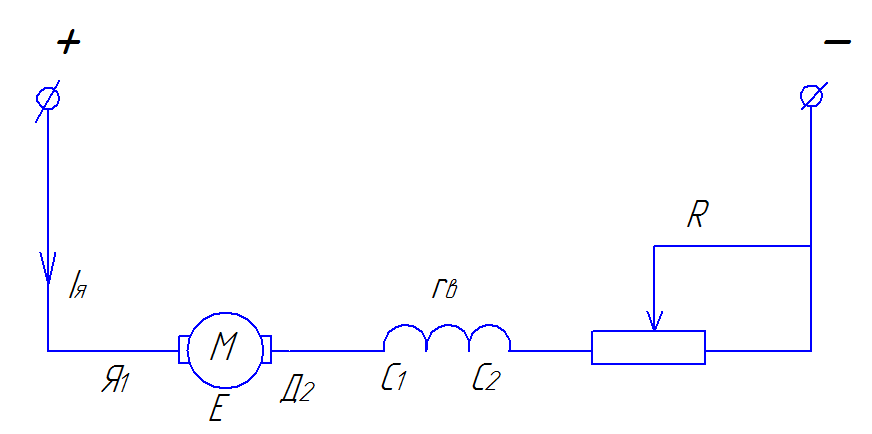
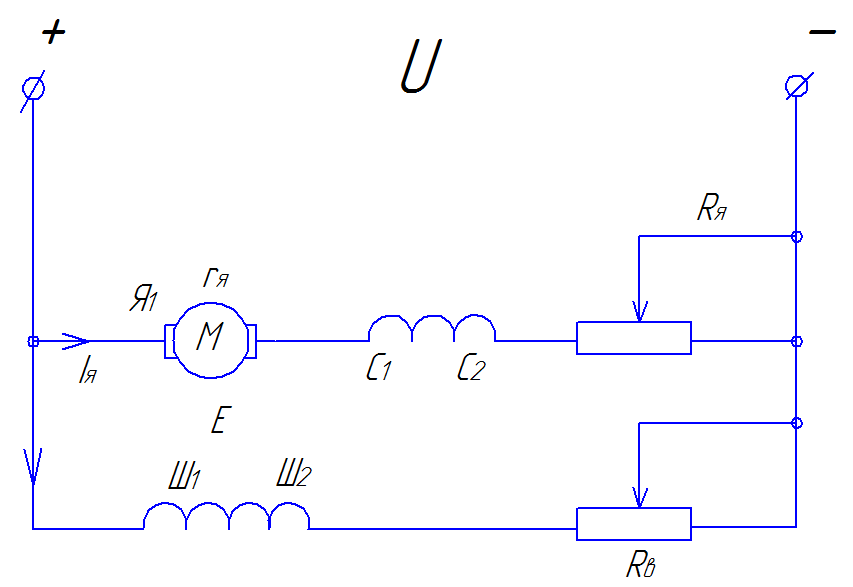
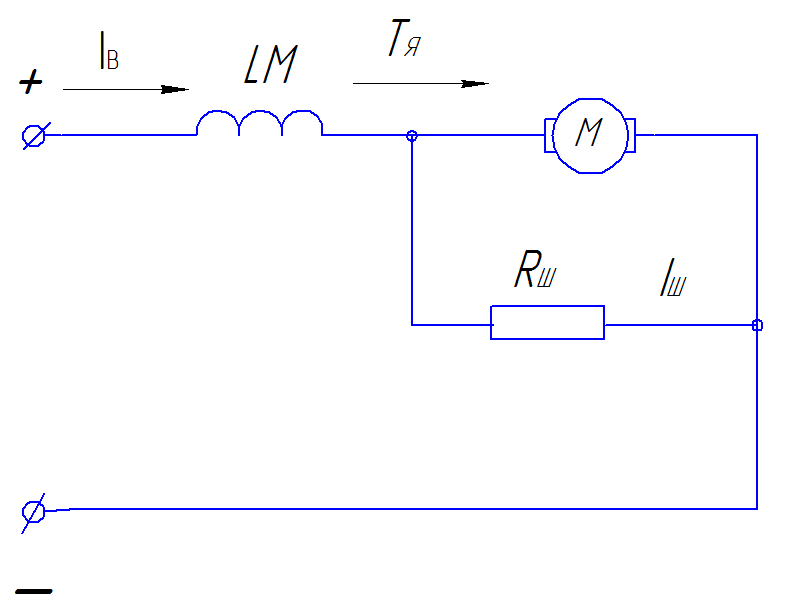
Регулирование их угловой скорости возможно изменением: сопротивления в цепи якоря (параметрическое управление), магнитного потока двигателя (полюсное управление) и напряжения питания цепи якоря(якорное управление).
Двигатели постоянного тока могут иметь независимое, последовательное или смешанное возбуждение
Схема включения независимого (параллельного возбуждения)
Eя=k
K=
 механическая
характеристика привода
механическая
характеристика привода
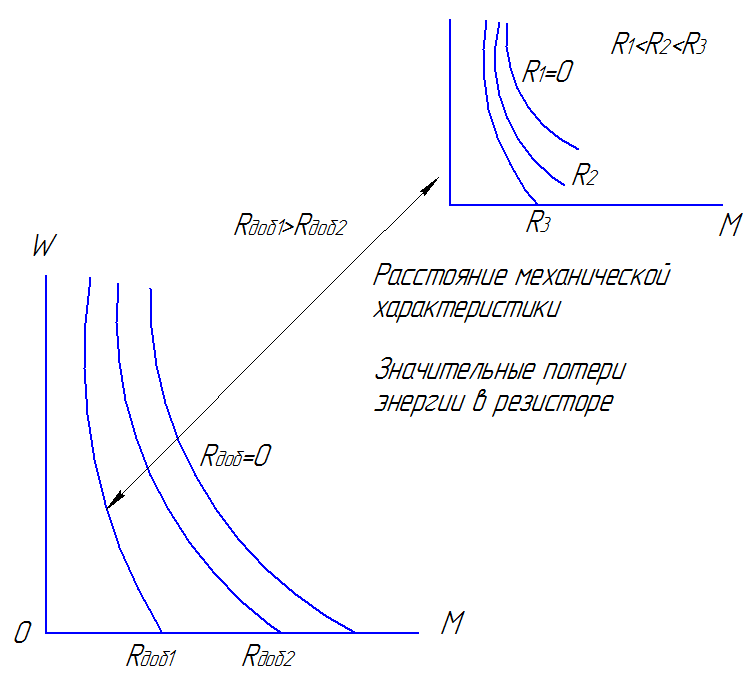
При
введении добавочного резистора в цепь
якоря скорость холостого хода  останется не изменой, а изменяется
наклон механических характеристик ,
т.е. уменьшается их жесткость. Данный
способ регулирования скорости в настоящее
время не используется, поскольку введение
добавочного резистора сопряжено с
потерями энергии в этом сопротивлении
останется не изменой, а изменяется
наклон механических характеристик ,
т.е. уменьшается их жесткость. Данный
способ регулирования скорости в настоящее
время не используется, поскольку введение
добавочного резистора сопряжено с
потерями энергии в этом сопротивлении
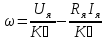
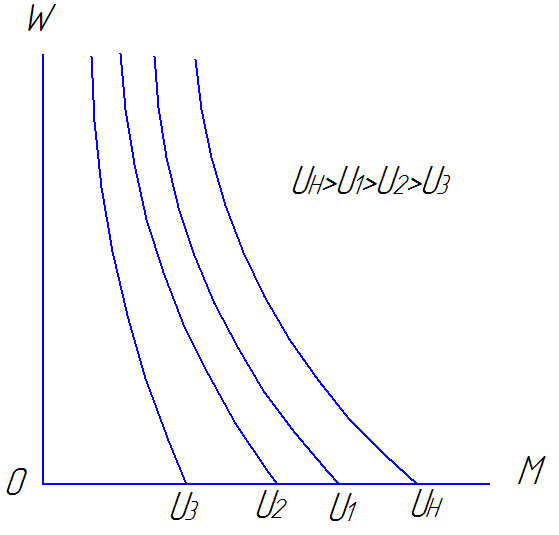
Основным
способом регулирования скорости ДПТ –
НВ является регулирование напряжения,
подводимого к якорю двигателя. При
этом скорость лишь уменьшить по сравнению
с номинальной, определяемой естественной
характеристикой. При уменьшении
напряжения якоря уменьшается скорость
холостого хода ,
а жесткость механической характеристики
остается постоянной. Повышение напряжения
питания выше номинальной не рекомендуется,
т.к. это может ухудшить коммутацию на
якоре.
,
а жесткость механической характеристики
остается постоянной. Повышение напряжения
питания выше номинальной не рекомендуется,
т.к. это может ухудшить коммутацию на
якоре.
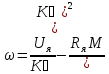
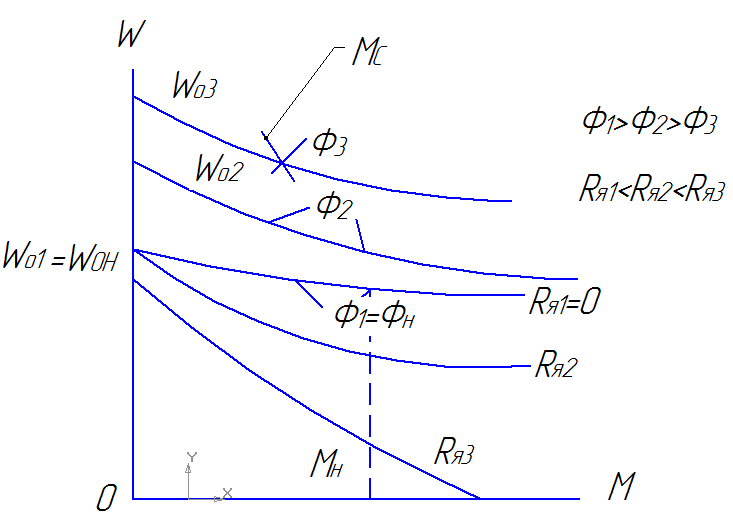
При постоянном потоке возбуждения
Повышение
скорости по сравнению с номинальной
проводится уменьшением тока (потока)
возбуждения. При уменьшении магнитного
потока 
 происходит увеличение скорости х.х.
происходит увеличение скорости х.х. и одновременно снижается жесткость
механических характеристик двигателя
и одновременно снижается жесткость
механических характеристик двигателя выше
выше нецелесообразно, т.к. магнитная цепь
машины насыщается возрастание магнитного
потока не будет существенно, а тепловой
режим нарушится.
нецелесообразно, т.к. магнитная цепь
машины насыщается возрастание магнитного
потока не будет существенно, а тепловой
режим нарушится.
Если
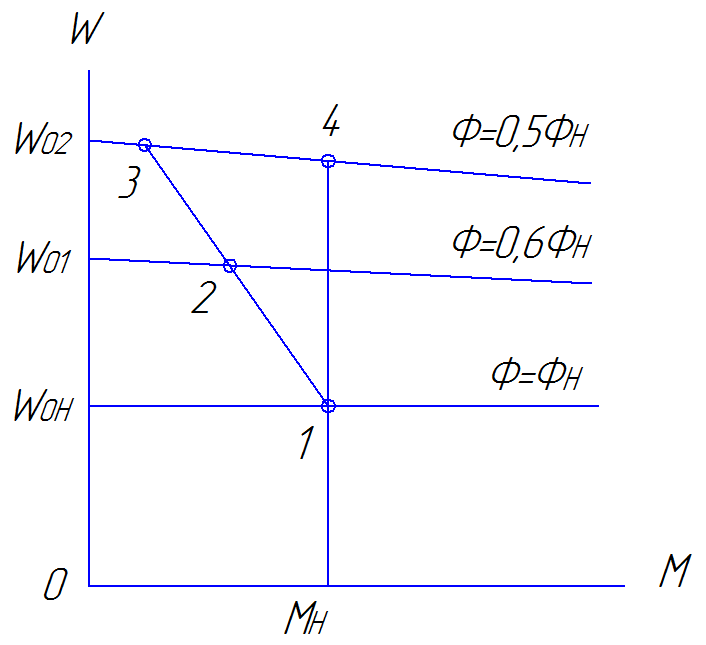
Мстат =Мн то при  двигатель будет работать в т. 1.
двигатель будет работать в т. 1.
Если
ослабить поток возбуждения в 2 раза то
скорость х.х  увеличится в 2 раза.
увеличится в 2 раза.
Мощность на валу постоянна – это преимущество
Если момент двигателя сохраняется постоянным и равным номинальному двигатель будет работать в т. 4.
Однако
M= ток якоря при этом увеличится в 2 раза.
По этому длит. работа в т. 4 недопустима.
Линия номинального момента при ослаблении
поля отображается кривой
ток якоря при этом увеличится в 2 раза.
По этому длит. работа в т. 4 недопустима.
Линия номинального момента при ослаблении
поля отображается кривой
1-2-3.
Двигатели постоянного тока последовательного и смешанного возбуждения.
Последовательное
возбуждение  ,
где а=f(Iя)
– нелинейный коэффициент.
,
где а=f(Iя)
– нелинейный коэффициент.
При
малых токах якоря а – величина постоянная
при  — двигатель насыщается и поток мало
зависит от тока якоря.
— двигатель насыщается и поток мало
зависит от тока якоря.
Наиболее экономичным изменение Uподв.
Характеристики
смещаются в низ по мере  Uпараллельно естественной характеристике.
Uпараллельно естественной характеристике.
Изменение
потока вращения в этих двигателях
возможно, если зашунтировать обмотку
якоря резистором с сопротивлением Rш,
тогда ток возбуждения ,
т.е.содержит постоянную составляющую
независимую от нагрузки двигателя.
,
т.е.содержит постоянную составляющую
независимую от нагрузки двигателя.
При этом двигатель приобретает свойство двигателя смешанного возбуждения
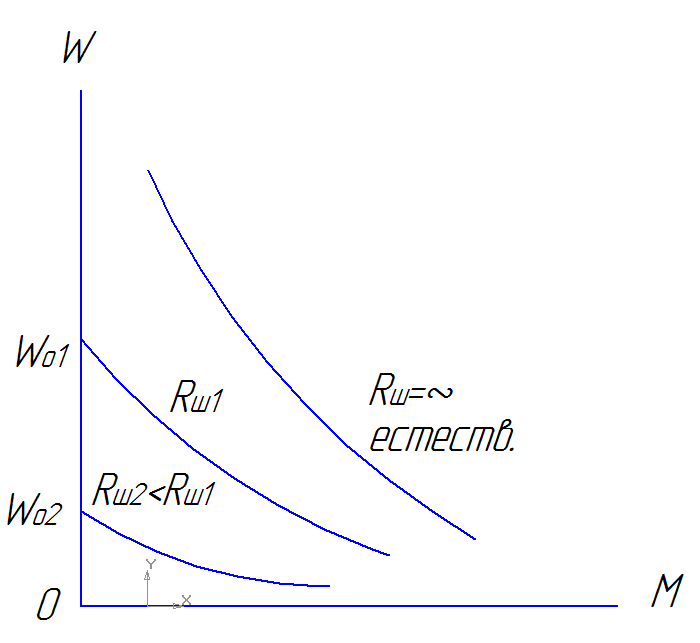
Двигатель смешенного возбуждения механические характеристики.
§79. Характеристики асинхронных двигателей
Характеристики асинхронных двигателей. Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие.
Механическая характеристика. Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.

Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
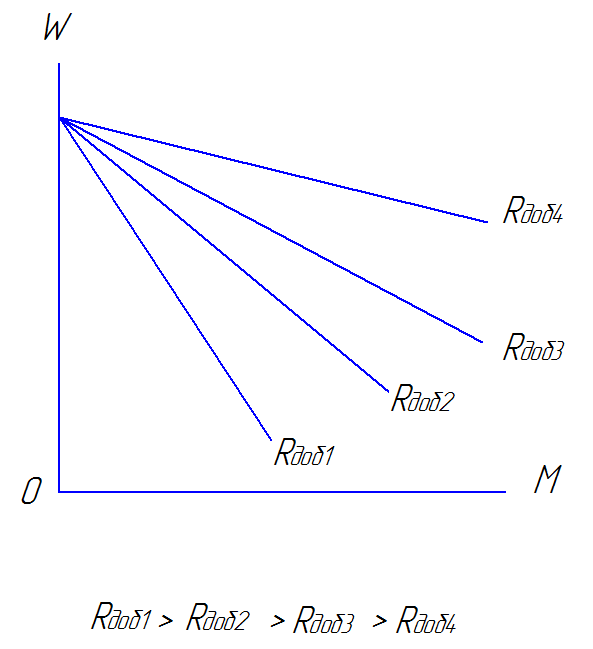
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками. Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
Рабочие характеристики. Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия ? и cos?1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos?1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рис. 264. Рабочие характеристики асинхронного двигателя
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз.
Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы). Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении. Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз. При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении. Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты. Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
Рабочие характеристики асинхронного двигателя
Под потерей фазы понимают однофазный режим работы электродвигателя в результате отключения питания по одному из проводов трехфазной системы.
Причинами потери фазы электродвигателем могут быть: обрыв одного из проводов, сгорание одного из предохранителей; нарушение контакта в одной из фаз.
В зависимости от обстоятельств, при которых произошла потеря фазы, могут быть разные режимы работы электродвигателя и последствия, сопутствующие этим режимам. При этом следует принимать во внимание следующие факторы: схему соединения обмоток электродвигателя («звезда» или «треугольник»), рабочее состояние двигателя в момент потери фазы (потеря фазы может произойти до или после включения двигателя, во время работы под нагрузкой), степень загрузки двигателя и механическую характеристику рабочей машины, число электродвигателей, работающих при потере фазы, и их взаимное влияние.
Здесь следует обратить внимание на особенность рассматриваемого режима. В трехфазном режиме каждая фаза обмотки обтекается током, сдвинутым во времени на одну треть периода. При потере фазы две обмотки обтекаются одним и тем же током, в третьей фазе ток отсутствует. Несмотря на то, что концы обмоток присоединены к двумя фазным проводам трехфазной системы, токи в обеих обмотках совпадают по времени. Такой режим работы называется однофазным.
Магнитное поле, образованное однофазным током, в отличие от вращающегося поля, образованного трехфазной системой токов, является пульсирующим. Оно изменяется во времени, но не перемещается по окружности статора. На рисунке 1, а показан вектор магнитного потока, создаваемого в двигателе при однофазном режиме. Этот вектор не вращается, а лишь изменяется по величине и знаку. Круговое поле сплющивается до прямой линии.
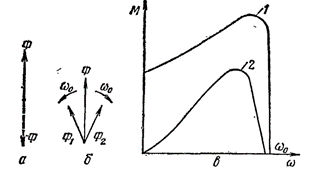
Рисунок 1. Характеристики асинхронного двигателя в однофазном режиме: а — графическое изображение пульсирующего магнитного поля; б — разложение пульсирующего поля на два вращающихся; в — механические характеристики асинхронного двигателя в трехфазном (1) и однофазном (2) режимах работы.
Пульсирующее магнитное поле можно рассматривать состоящим из двух вращающихся навстречу друг другу равных по величине полей (рис. 1, б). Каждое поле взаимодействует с обмоткой ротора и образует вращающий момент. Их суммарное действие создает вращающий момент на валу двигателя.
В том случае, когда потеря фазы произошла до включения двигателя в сеть, на неподвижный ротор действуют два магнитных поля, которые образуют два противоположных по знаку, но равных по величине момента. Их сумма будет равна нулю. Поэтому при пуске двигателя в однофазном режиме он не может развернуться даже при отсутствии нагрузки на валу.
Если потеря фазы произошла в то время, когда ротор двигателя вращался, то на его валу образуется вращающий момент. Это можно объяснить следующим образом. Вращающийся ротор по разному взаимодействует с вращающимися навстречу друг другу полями. Одно из них, вращение которого совпадает с вращением ротора, образует положительный (совпадающий по направлению) момент, другое — отрицательный. В отличие от случая с неподвижным ротором эти моменты будут разными по величине. Их разность будет равна моменту на валу двигателя.
На рисунке 1, в показана механическая характеристика двигателя в однофазном и трехфазном режимах работы. При нулевой скорости момент равен нулю, при появлении вращения в любую сторону на валу двигателя возникает момент.
Если отключение одной из фаз произошло во время работы двигателя, когда его скорость была близка к номинальному значению, вращающий момент часто бывает достаточным для продолжения работы с небольшим снижением скорости. В отличие от трехфазного симметричного режима появляется характерное гудение. В остальном внешние проявления аварийного режима не наблюдаются. Человек, не имеющий опыта работы с асинхронными двигателями, может не заметить изменения характера работы электродвигателя.
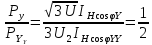
Переход электродвигателя в однофазный режим сопровождается перераспределением токов и напряжений между фазами. Если обмотки двигателя соединены по схеме «звезда», то после потери фазы образуется схема, показанная на рисунке 2. Две последовательно соединенные обмотки двигателя оказываются включенными на линейное напряжение Uаb, двигатель при этом оказывается в однофазном режиме работы.
Сделаем небольшой расчет, определим токи, протекающие по обмоткам двигателя и сравним их с токами при трехфазном питании.
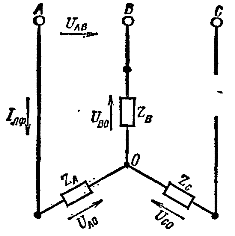
Рисунок 2. Соединение обмоток двигателя по схеме «звезда» после потерн фазы
Так как сопротивления Zа и Zв соединены последовательно, напряжения на фазах А и В будут равны половине линейного:
Приближенно величину тока можно определить исходя из следующих соображений.
Пусковой ток фазы А при потере фазы
Пусковой ток фазы А при трехфазном режиме
где Uao — фазовое напряжение сети.
Отношение пусковых токов:
Из соотношения следует, что при потере фазы пусковой ток составляет 86% от величины пускового тока при трехфазном питании. Если учесть, что пусковой ток короткозамкнутого асинхронного двигателя в 6 — 7 раз больше номинального, то получается, что по обмоткам двигателя протекает ток Iiф = 0,86 х 6 = 5,16 Iн, т. е. в пять с лишним раз превышающий номинальный. За короткий промежуток времени такой ток перегреет обмотку.
Из приведенного расчета видно, что рассматриваемый режим работы весьма опасен для двигателя и в случае его возникновения защита должна отключить с незначительной выдержкой времени.
Потеря фазы может произойти и после включения двигателя, когда его ротор будет иметь скорость вращения, соответствующую рабочему режиму. Рассмотрим токи и напряжения обмоток в случае перехода в однофазный режим при вращающемся роторе.
Величина Za зависит от скорости вращения. При пуске, когда скорость вращения ротора равна нулю, она одинакова как для трехфазного, так и для однофазного режима. В рабочем режиме в зависимости от нагрузки и механической характеристики двигателя скорость вращения может быть разной. Поэтому для анализа токовых нагрузок необходим другой подход.
Будем считать, что как в трехфазном, так и в однофазном режиме двигатель развивает. одинаковую мощность. Независимо от схемы включения электродвигателя рабочая машина требует ту же самую мощность, которая необходима для выполнения технологического процесса.
Полагая мощности на валу двигателя равными для обоих режимов, будем иметь:
при трехфазном режиме
при однофазном режиме
где Ua — фазовое напряжение сети; Uao — напряжение на фазе А в однофазном режиме, cos φ3 и cos φ1 — коэффициенты мощности при трехфазном и однофазном режимах соответственно.
Опыты с асинхронным двигателем показывают, что фактически ток возрастает почти вдвое. С некоторым запасом можно считать I1a / I2a = 2.
Для того чтобы судить о степени опасности однофазного режима работы, нужно также знать загрузку двигателя.
В первом приближении будем считать ток электродвигателя в трехфазном режиме пропорциональным его нагрузке на валу. Такое допущение справедливо при нагрузках более 50% от номинального значения. Тогда можно написать Iф = Kз х Iн, где Kз — коэффициент загрузки двигателя, Iн — номинальный ток двигателя.
Ток при однофазном режиме I1ф = 2Kзх Iн, т. е. ток при однофазном режиме будет зависеть от загрузки двигателя. При номинальной нагрузке он равен двойному номинальному току. При нагрузке менее 50% потеря фазы при соединении обмоток двигателя в «звезду» не создает опасного для обмоток превышения тока. В большинстве случаев коэффициент загрузки двигателя меньше единицы. При его значениях порядка 0,6 — 0,75 следует ожидать небольшого превышения тока (на 20— 50%) по сравнению с номинальным. Это существенно для работы защиты, так как именно в этой области перегрузок она действует недостаточно четко.
Для анализа некоторых способов защиты необходимо знать напряжение на фазах двигателя. При заторможенном роторе напряжение на фазах А и В будет равно половине линейного напряжения Uab, а напряжение на фазе С будет равно нулю.
Иначе распределяется напряжение при вращающемся роторе. Дело в том, что его вращение сопровождается образованием вращающегося магнитного поля, которое, действуя на обмотки статора, наводит в них электродвижущую силу. Величина и фаза этой электродвижущей силы таковы, что при скорости вращения, близкой к синхронной, на обмотках восстанавливается симметричная система трехфазного напряжения, а напряжение нейтрали звезды (точка 0) становится равным нулю. Таким образом, при изменении скорости вращения ротора от нуля до синхронной в однофазном режиме работы напряжение на фазах А и В изменяется от значения, равного половине линейного, до значения, равного фазовому напряжению сети. Например, в системе напряжения 380/220 В напряжение на фазах А и В изменяется в пределах 190 — 220 В. Напряжение Uco изменяется от нуля при заторможенном роторе до фазового напряжения 220 В при синхронной скорости. Что же касается напряжения в точке 0, то оно изменяется от значения Uab/2 — до нуля при синхронной скорости.
Если обмотки двигателя соединены по схеме «треугольник», то после потери фазы мы будем иметь схему соединений, показанную на рисунке 3. В этом случае обмотка двигателя с сопротивлением Zab оказывается включенной на линейное напряжение Uab, а обмотка с сопротивлениями Zfc и Zbc — соединенной последовательно и включенной на то же самое линейное напряжение.
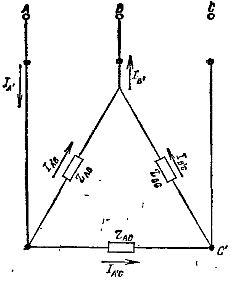
Рисунок 3. Соединение обмоток электродвигателя по схеме «треугольник» после потери фазы
В пусковом режиме по обмоткам АВ будет протекать такой же ток, как и при трехфазном варианте, а по обмоткам АС и ВС будет протекать ток в два раза меньший, так как эти обмотки соединены последовательно.
Токи в линейных проводах I’a=I’b будут равны сумме токов в параллельных ветвях: I’А = I’ab + I’bc = 1,5 Iab
Таким образом, в рассматриваемом случае при потере фазы пусковой ток в одной из фаз будет равен пусковому току при трехфазном питании, а линейный ток возрастает менее интенсивно.
Для расчета токов в случае потери фазы после включения двигателя в работу применим тот же метод, что и для схемы «звезда». Будем считать, что как в трехфазном, так и в однофазном режимах двигатель развивает одинаковую мощность.
В этом режиме работы ток в наиболее нагруженной фазе при потере фазы увеличивается вдвое по сравнению с током при трехфазном питании. Ток в линейном проводе будет равен I’А = 3Iab, а при трехфазном питании Ia = 1,73 Iab.
Здесь важно отметить, что в то время как фазовый ток возрастает в 2 раза, линейный ток увеличивается только в 1,73 раза. Это существенно, так как токовая защита реагирует на линейные токи. Расчеты и выводы относительно влияния коэффициента загрузки на ток однофазного режима при соединении «звезда» остаются в силе и для случая схемы «треугольник».
Напряжения на фазах АС и ВС будут зависеть от скорости вращения ротора. При заторможенном роторе Uac’ = Ubc’ = Uab/2
При скорости вращения, равной синхронной, восстанавливается симметричная система напряжений, т. е. Uac’ = Ubc’ = Uab.
Таким образом, напряжения на фазах АС и ВС при изменениях скорости вращения от нуля до синхронной будут меняться от значения, равного половине линейного, до значения, равного линейному напряжению.
Токи и напряжения на фазах двигателя при однофазном режиме зависят также и от числа двигателей.
Часто обрыв фазы происходит из-за перегорания одного из предохранителей на питающем фидере подстанции или распределительного устройства. В результате в однофазном режиме оказывается группа потребителей, взаимно влияющих друг на друга. Распределение токов и напряжений зависит от мощности отдельных двигателей и их нагрузки. Здесь возможны различные варианты. Если мощности электродвигателей равны, а их нагрузка одинакова (например, группа вытяжных вентиляторов), то всю группу двигателей можно заменить одним эквивалентным.
Механическая характеристика асинхронного двигателя
Механическая характеристика представляет геометрическое место рабочих точек при постоянных частоте и напряжении.
Под
механической характеристикой принято
понимать зависимость частоты вращения
ротора в функции от электромагнитного
момента  .
Эту характеристику можно получить,
используя зависимость
.
Эту характеристику можно получить,
используя зависимость и пересчитав частоту вращения ротора
при разных значениях скольжения.
и пересчитав частоту вращения ротора
при разных значениях скольжения.
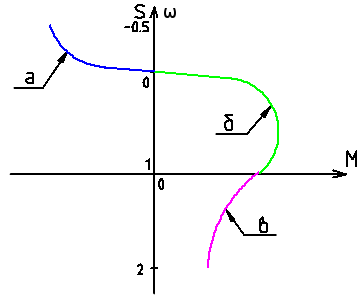
Так
как  ,
отсюда
,
отсюда .
.
Участок
1-3 соответствует устойчивой работе,
участок 3-4 – неустойчивой работе. Точка
1 соответствует идеальному холостому
ходу двигателя, когда  .
Точка 2 соответствует номинальному
режиму работы двигателя, ее координаты
.
Точка 2 соответствует номинальному
режиму работы двигателя, ее координаты и
и .
Точка 3 соответствует критическому
моменту
.
Точка 3 соответствует критическому
моменту и критической частоте вращения
и критической частоте вращения Точка 4 соответствует пусковому моменту
двигателя
Точка 4 соответствует пусковому моменту
двигателя .
Механическую характеристику можно
рассчитать и построить по паспортным
данным.
.
Механическую характеристику можно
рассчитать и построить по паспортным
данным.
Асинхронные двигатели имеют жесткую механическую характеристику, т.к. частота вращения ротора (участок 1–3) мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей.
Показать на графике как меняется рабочая точка при изменении нагрузки. Адаптация АД.
Пуск в ход асинхронного двигателя
В
момент пуска в ход  ,
т.е. скольжение
,
т.е. скольжение .
Т.к. токи в обмотках ротора и статора
зависят от скольжения и возрастают при
его увеличении, пусковой ток двигателя
в 5 ÷ 8 раз больше его номинального тока.
.
Т.к. токи в обмотках ротора и статора
зависят от скольжения и возрастают при
его увеличении, пусковой ток двигателя
в 5 ÷ 8 раз больше его номинального тока.

Из-за большой частоты ЭДС ротора асинхронные двигатели имеют ограниченный пусковой момент

Для пуска в ход двигателя необходимо, чтобы развиваемый им пусковой момент превышая момент нагрузки на валу. В зависимости от мощности источников питания и условий пуска используют разные способы пуска, которые преследуют цели: уменьшение пускового тока и увеличение пускового момента.
Различают следующие способы пуска в ход асинхронных двигателей: прямое включение в цепь, пуск при пониженном напряжении, реостатный пуск, использование двигателей с улучшенными пусковыми свойствами.
Регулирование частоты вращения асинхронных двигателей
При работе многих механизмов, приводящихся во вращение асинхронными двигателями, в соответствии с технологическими требованиями возникает необходимость регулировать скорость вращения этих механизмов. Способы регулирования частоты (скорости) вращения асинхронных двигателей раскрывает соотношение:
 .
.
Отсюда следует, что при заданной нагрузке на валу частоту вращения ротора можно регулировать:
изменением скольжения;
изменением числа пар полюсов;
изменением частоты источника питания.
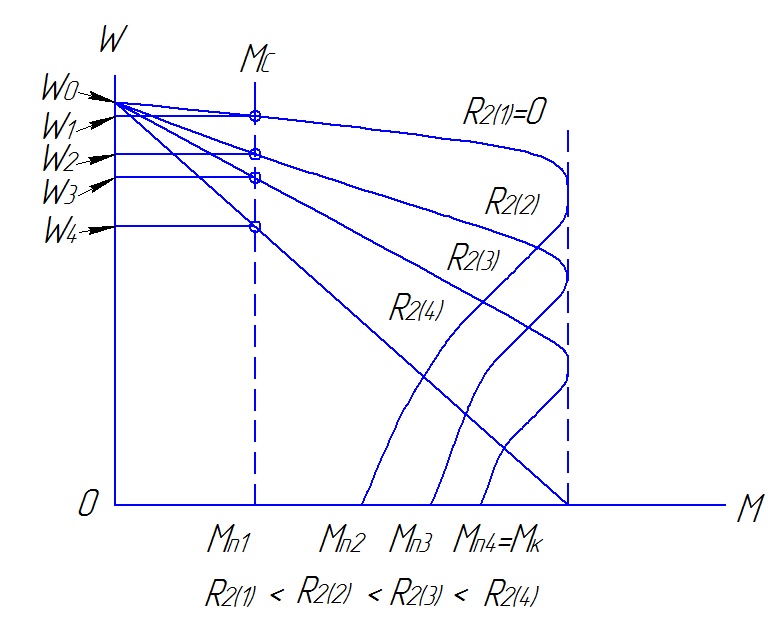
Изменение скольжения
Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение.

Rр3>Rр2>0, Rр1=0.
Как следует из рисунка при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа:
Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный.
Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя.
Невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
Естественная механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателя имеет два участка – нерабочий (разгонный) АВ и рабочий ВСD (рис. 8.8).
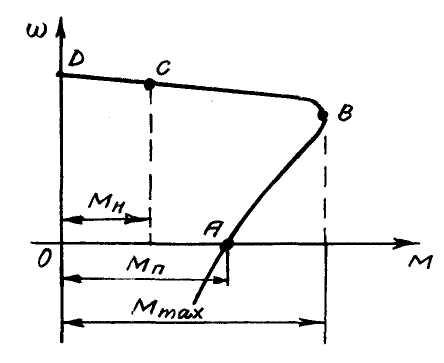
Рис. 10.5 Естественная механическая характеристика асинхронного двигателя
При
пуске двигатель развивает пусковой
момент 
 (отрезок
ОА), после чего разгоняется по траектории
АВС до точки С. При этом на участке АВ
одновременно увеличиваются как скорость,
так и момент, в точке В двигатель развивает
максимальный момент
(отрезок
ОА), после чего разгоняется по траектории
АВС до точки С. При этом на участке АВ
одновременно увеличиваются как скорость,
так и момент, в точке В двигатель развивает
максимальный момент
 .
На участке ВС скорость продолжает
увеличиваться, а момент уменьшается,
до номинального (точка С). На участкеBC двигатель
перегружен,
т.к. в любой точке этого участка электромагнитный
момент двигателя больше номинального (
.
На участке ВС скорость продолжает
увеличиваться, а момент уменьшается,
до номинального (точка С). На участкеBC двигатель
перегружен,
т.к. в любой точке этого участка электромагнитный
момент двигателя больше номинального ( > >
> >
 ).
).
В нормальних условиях двигатель работает на участке СD, жесткость которого
β
= Δ / Δω <
10%.
/ Δω <
10%.
Это означает, что при изменении момента в широких пределах скорость двигателя изменяется незначительно.
Асинхронные двигатели нашли самое широкое применение на судах с электростанцией на переменном токе.
Промышленность выпускает специально для судов асинхронные двигатели разных серий, например, 4А…ОМ2 (четвертая серия асинхронных двигателей), МАП (морской асинхронный полюсопереключаемый), МТF (c фазным ротором) и др.
При этом двигатели серии 4А – односкоростные, серии МАП – двух- и трехскоростные, серии МТF – число скоростей определяется схемой управления ( до 5 скоростей ).
Тема лекции 11 Саморегулирование электродвигателей план лекции
Естественное и искусственное изменение скорости электродвигателей
Саморегулирование электродвигателей постоянного тока
Саморегулирование асинхронных двигателей
Активной и реактивная составляющие тока в асинхронном двигателе
Изменение скорости электродвигателей
Различают два вида изменения скорости электродвигателя:
естественное;
искусственное.
Под естественным понимают изменение скорости электродвигателя, возникшее в результате изменения статического момента механизма.
При естественном изменении скорости электродвигатель работает на своей естественной механической характеристике.
Под искусственным понимают изменение скорости электродвигателя, возникшее в результате изменения параметров питающей сети или самого электродвигателя при помощи схемы управления электродвигателя.
Подизменением параметров сети понимают:
на постоянном токе – напряжение питающей сети;
на переменном токе — напряжение и частота питающей сети.
Под изменением параметров электродвигателя понимают:
на постоянном токе – изменение сопротивления цепи обмотки якоря или параллельной (независимой) обмотки возбуждения;
на переменном токе — изменение сопротивления цепи обмотки статора или обмотки фазного ротора.
Если многоскоростной асинхронный двигатель имеет на статоре несколько обмоток (обычно 2….3) с разным числом пар электромагнитных полюсов, то механические характеристики, соответствующие работе двигателя на каждой скорости, являются естественными.
При искусственном изменении скорости электродвигатель работает на искусственной механической характеристике.
Искусственные механические характеристики предназначены для изменения (регулирования) скорости электродвигателя в соответствии с технологическими особенностями работы механизма. Например, электроприводы грузовых лебедок на постоянном токе могут иметь до 6 скоростей, на переменном токе – обычно 3 скорости.
Следует сделать важное замечание: при работе двигателя на искусственной характеристике одновременно может происходить и естественное изменение скорости электродвигателя вследствие изменения статического момента механизма.
Например, при выбирании якоря при помощи ЯШУ скорость электродвигателя, работающего на искусственной характеристике вначале может быть большой, а затем, по мере увеличения натяжения якорь-цепи, будет постепенно уменьшаться, вплоть до полной остановки электродвигателя с его переходом в режим стоянки под током.
При естественном изменении скорости возникает процесс саморегулирования элекродвигателей постоянного и переменного тока.
Любое изменение статического момента механизма (т.е. механической нагрузки на валу рабочего органа электропривода) автоматически приводит к такому же изменению электромагнитного момента двигателя в результате возникающего при этом процесса саморегулирования электродвигателя.
Под саморегулированием понимают автоматическое изменение электромагнитного момента двигателя вследствие изменения статического момента (момента сопротивления) механизма.
7. Асинхронные двигатели. Технические средства автоматизации и управления. Учебное пособие
7.1. Принцип действия асинхронного двигателя
7.2. Статические характеристики асинхронного двигателя
7.3. Управление асинхронными двигателями
7.3.1. Управление трехфазными асинхронными двигателями
7.3.2. Управление двухфазными асинхронными двигателями
7.1. Принцип действия асинхронного двигателя
Двигатели переменного тока делятся на синхронные и асинхронные двигатели. Асинхронные двигатели (АД) в свою очередь делятся на двух и трехфазные, из которых в качестве исполнительных двигателей в системах автоматического управления в основном применяются маломощные двигатели до 300 Вт.
Их преимущества перед ДПТ: малая инерционность, бесконтактность, дешевизна.
Их недостатки в сравнении с ДПТ: большие тепловые потери, малый пусковой момент, нелинейные характеристики.
Принцип действия рассмотрим на примере двухфазного асинхронного двигателя, с полым ротором в виде алюминиевого стакана. На статоре этого двигателя расположены две обмотки. Эти обмотки расположены на магнитопроводе под углом 900 друг к другу. На эти обмотки подаются синусоидальные напряжения, сдвинутые по фазе на 900 друг к другу. Под действием этих напряжений в обмотках протекают токи I1, I2, также синусоидальные и сдвинутые по фазе на 900. Будем считать, что амплитуды их равны. Эти токи, в свою очередь, создают в магнитопроводе два пульсирующих вектора магнитной индукции и, соответственно два магнитных потока, равных по амплитуде и сдвинутые по фазе на 900 друг к другу в пространстве и времени. Они суммируются, и создается результирующий магнитный поток, имеющий постоянную амплитуду и вращающийся по окружности с частотой w, где w=2p¦, а ¦ — частота сети.
Рассмотрим получение кругового вращающегося магнитного поля в случае двухфазной системы (рис. 70).
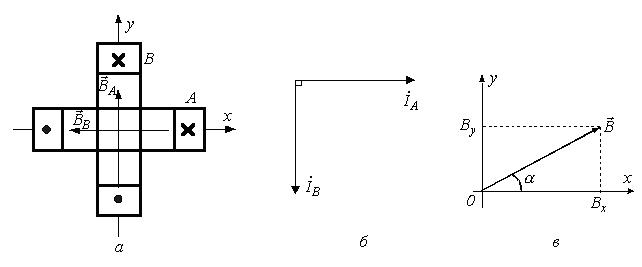
Рис. 70. Двухфазная система
При пропускании через катушки гармонических токов каждая из них в соответствии с вышесказанным будет создавать пульсирующее магнитное поле. Векторы ВА и ВВ, характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 900, то ВА= Вmsin(wt) и ВВ= Вmsin(wt-900).
Найдем проекции результирующего вектора магнитной индукции Вна оси x и y декартовой системы координат, связанной с осями катушек:

Модуль результирующего вектора магнитной индукции в соответствии с рис. 70 равен ,
,
при этом для тангенса угла a , образованного этим вектором с осью абсцисс, можно записать
 , откуда a=wt.
, откуда a=wt.
Полученные соотношения показывают, что вектор результирующего магнитного поля неизменен по модулю и вращается в пространстве с постоянной угловой частотой  , описывая окружность, что соответствует круговому вращающемуся полю.
, описывая окружность, что соответствует круговому вращающемуся полю.
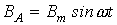
Симметричная трехфазная система катушек также позволяет получить круговое вращающееся магнитное поле. Рис. 71. Каждая из катушек А, В и С при пропускании по ним гармонических токов создает пульсирующее магнитное поле. Катушки питаются трехфазной системой токов с временным сдвигом по фазе на 1200. Поэтому для мгновенных значений индукций катушек имеют место соотношения
 ;
;  ;
;  .
.
Произведя аналогичные расчеты, получим, что модуль результирующего вектора магнитной индукции равен В=1,5 Вm, и также вращается в пространстве с постоянной угловой частотой ,
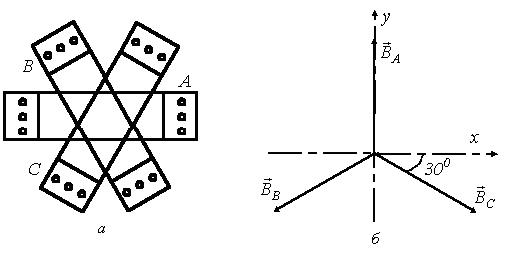
Рис. 71. Трехфазная система
Силовые линии вращающегося магнитного поля пересекают ротор двигателя, выполненный, например, в виде алюминиевого стакана. В материале ротора наводятся вихревые токи, которые взаимодействуют с вращающимся магнитным потоком статоре и создают движущий момент. Под действием этого момента ротор начинает раскручиваться и набирает скорость до тех пор, пока движущий момент не будет уравновешен моментом, создаваемым нагрузкой.
Скорость вращения ротора асинхронного двигателя всегда меньше скорости вращения поля, так как в случае их равенства результирующий магнитный поток будет неподвижен относительно ротора, вихревых токов не будет, и, следовательно, не будет движущего момента. Поэтому двигатель называется асинхронным. Величина отставания скорости вращения ротора от скорости вращения поля характеризуется скольжением.
При заторможенном роторе S=1, в идеальном случае при вращении со скоростью поля S=0.
Используются различные конструкции ротора АД. Есть трехфазные АД с фазным ротором, при этом на роторе также намотаны три, пространственно сдвинутых обмотки. В эти обмотки обычно включают внешние сопротивления (реостаты), которыми ограничивается пусковой ток и может регулироваться скорость вращения ротора. Двухфазные АД изготавливают с короткозамкнутой обмоткой: в виде беличьего колеса; в виде вала или стакана из проводящего материала. .Рис 72, 73, 74.
Рис. 72. Трехфазный АД с фазным ротором
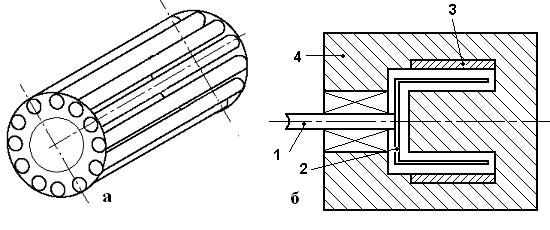
Рис. 73. Ротор АД в виде беличьей клетки (а) и в виде стакана (б)
7.2. Статические характеристики асинхронного двигателя
Под действием электромагнитной индукции в обмотках или элементах короткозамкнутого ротора («беличьей клетке») индуктируются вторичные ЭДС и токи частоты ω2, которые взаимодействуют с вращающимся магнитным полем, создается электромагнитный момент M, что приводит к вращению ротора с частотой ω1. Рассмотрим для примера модель двигателя, в которой число пар полюсов p=1.
Частота индуцируемых во вторичной обмотке (роторе) ЭДС и токов ω2 зависит от скольжения S:
 .
.
Эквивалентная схема цепи ротора в рабочем режиме показана на Рис 74.
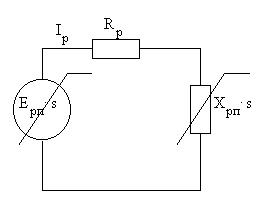
Рис. 74. Схема цепи ротора АД
Она содержит изменяемый источник ЭДС Eрп·S и изменяемое индуктивное сопротивление xр=xрп·S. Они изменяются при изменении скольжения S (частоты вращения), а активное сопротивление Rp не изменяется.
Мы можем привести рабочий режим двигателя к режиму неподвижного ротора и рассматривать асинхронную машину как обычный трансформатор с неподвижными обмотками; в результате преобразования получаем эквивалентную схему. АД, с учетом параметров обмотки статора.
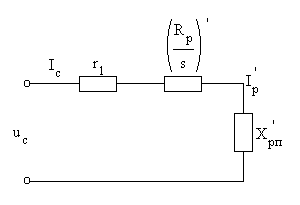
Рис. 75. Эквивалентная электрическая схема АД
На схеме обозначены:  — приведенные сопротивления, n- коэффициент трансформации, а r1— активное сопротивление цепи статора. На основании этой схемы получим выражение для тока ротора
— приведенные сопротивления, n- коэффициент трансформации, а r1— активное сопротивление цепи статора. На основании этой схемы получим выражение для тока ротора
Выражение для вращающегося момента можем получить из энергетического уравнения M·ω1= M·ω+m1·Ip2·Rp, где m1— количество фаз. Левая часть уравнения — электромагнитная мощность, а правая — механическая плюс электрическая мощности.
Подставляя сюда выражения для тока ротора, получим аналитическое выражение для электромагнитного момента и, если пренебречь активным сопротивлением обмотки статора, получается уравнение Клосса, отражающее зависимость электромагнитного момента от скольжения. Выражение для момента двигателя представлено через параметры критической точки:
 .
.
Скольжение, соответствующее максимальному моменту, называется критическим и обозначается SK или SM.
Критическое скольжение за зависит от соотношение активного и индуктивного сопротивлений ротора. При r1=0 получим  и
и  .
.
Вид зависимости электромагнитного момента и тока ротора от скольжения показан на. рис. 76.
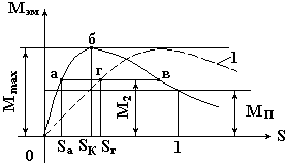
Рис. 76. Зависимость электромагнитного момента АД от скольжения
Пусть исполнительный механизм, приводимый во вращение данным двигателем, создает противодействующий тормозной момент М2. На рис. 76 имеются две точки, для которых справедливо равенство Мэм = М2; это точки а и в.
В точке а двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие Мэм = М2;.
В точке в работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку а. Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть — областью неустойчивой работы. Точка б, соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы.
Максимальному значению вращающего момента соответствует критическое скольжение Sk. Скольжению S = 1 соответствует пусковой момент. Если величина противодействующего тормозного момента М2больше пускового МП, двигатель при включении не запустится, останется неподвижным. Еще выводы:
- величина максимального вращающего момента не зависит от активного сопротивления цепи ротора;
- с увеличением активного сопротивления цепи ротора максимальный вращающий момент, не изменяясь по величине, смещается в область больших скольжений;
- вращающий момент пропорционален квадрату напряжения сети.
Механической характеристикой асинхронного двигателя называется зависимость частоты вращения двигателя от момента на валу n2 = f (M2). Механическую характеристику получают при условии U — const, w1 — const. На рис. 77 изображена типичная механическая характеристика асинхронного двигателя.
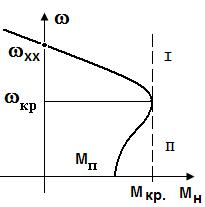
Рис. 77. Механическая характеристика асинхронного двигателя
На механической характеристике АД можно выделить два участка, которые разделены значением Мкр:
- режим устойчивой работы,
- режим неустойчивой работы.
Для каждого двигателя есть свое значение Мкр. При работе двигателя на первом участке Мкр.< Мн<0. и двигатель может развить вращающий момент, компенсирующий момент нагрузки. При работе двигателя на втором участке Мкр.> Мн происходит торможение и двигатель останавливается.
Различают 3 статических режима работы:
- Двигательный. В этом режиме направление вращения ротора и поля совпадают и . wp<w.
- Режим генераторного торможения. В этом режиме направление вращения ротора и поля совпадают, но . wp>w. Это возможно, если момент нагрузки поменяет знак. Двигатель не потребляет, а отдает энергию.
- Режим торможения противовключением. Реализуется, если в обмотке управления изменится фаза на 1800, после этого вращающий момент поменяет знак и будет тормозить ротор.
7.3. Управление асинхронными двигателями
Есть различные способы управления асинхронными двигателями:
- параметрическое управления трехфазными асинхронными двигателями.
- симметричное частотное управление,
- несимметричное амплитудно–фазовое управление,
7.3.1. Управление трехфазными асинхронными двигателями
1. Рассмотрим сначала способы управления трехфазными асинхронными двигателями. Первый способ используется для двигателей с фазным ротором. Критическое скольжение Skr определяется активным сопротивлением ротора Rr. Если Rr изменять, то будет изменяться наклон механической характеристики и соответственно скорость вращения ротора. Рис.78..
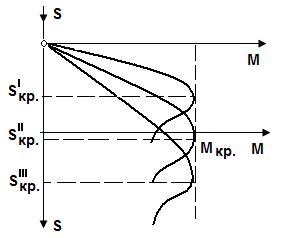
Рис. 78. Механическая характеристика асинхронного двигателя
Такой способ используется при пуске двигателя под нагрузкой, когда желательно, чтобы пусковой момент был максимальным. Для регулирования он применяется редко, т. к. велики тепловые потери в роторной цепи. Другим способом регулирования скорости является изменение напряжения на статоре, для АД вращающий момент изменяется пропорционально квадрату напряжения. При этом изменение напряжения питания мало влияет на частоту вращения ротора на рабочем участке и диапазон управления напряжением весьма ограничен.
2. Плавное регулирование скорости в широких пределах с сохранением достаточной жесткости характеристик возможно только при частотном управлении.. Изменяя частоту вращения поля ω1, можно изменять частоту вращения ротора ω при этом желательно, чтобы. жесткость характеристики не изменялась. Для этого одновременно с частотой, изменяют напряжение питания Uc так, чтобы их отношение оставалось постоянным Uc/w1=const.
Такое управление называется пропорциональным частотным управлением. Вид механических характеристик при пропорциональном управлении показан на рис. 79.
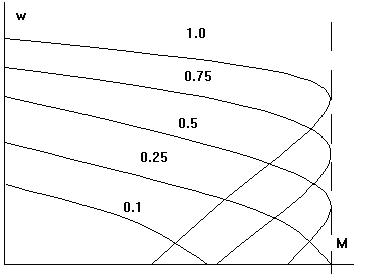
Рис. 79. Частотное управление асинхронным двигателем
При симметричном частотном управлении требуется специальное устройство преобразователь частоты, формирующий на выходе синусоидальный сигнал с изменяемой частотой w. Поле при этом управлении круговое, амплитуды на обмотках равны. Диапазон частот должен быть ограничен, так как при низких частотах падает индуктивное сопротивление обмоток и сильно растет ток, для высоких частот тоже существуют конструктивные и электрические ограничения. Поэтому при частотном управлении на самом деле идет управление по двум параметрам: частоте и амплитуде.
Функциональная схема частотного управления представлена на. на рис. 80. Она состоит из управляемого выпрямителя УВ, преобразующего напряжение переменного тока частотой 50 Гц в напряжение постоянного тока Uп, величина которого может регулироваться устройством управления УУ. Автономный инвертор АИ преобразует напряжение Uп в трехфазное напряжение изменяемой частоты f1. Управляющее устройство, изменяя частоту f1в в зависимости от задания ωз, изменяет также и напряжение Uп так, чтобы их отношение оставалось постоянным. Система управления может иметь обратную связь по скорости вращения через тахогенератор ТГ.
Более совершенным, чем пропорциональное управление, является частотно-токовое управление, при котором контролируется, кроме частоты вращения, ток якоря от датчика, что позволяет оставлять постоянным поток при изменении частоты f1 и нагрузки.
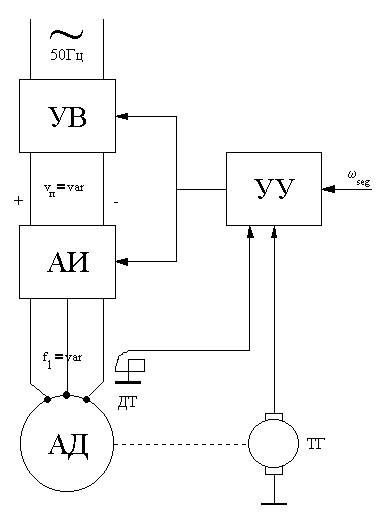
Рис. 80. Функциональная схема частотного управления асинхронным двигателем
7.3.2. Управление двухфазными асинхронными двигателями
В исполнительных приводах малой мощности широко в основном используются управляемые и неуправляемые двухфазные асинхронные двигатели. Эти , двигатели имеют две обмотки: одна включается в сеть непосредственно и называется обмоткой возбуждения (главной). На обмотку управления (вспомогательную), сдвинутую на статоре на90o градусов напряжение подается через фазосдвигающий элемент. Ротор всегда короткозамкнутый.
При таком способе управления есть разные варианты: амплитудное, фазовое и амплитудно–фазовое управление. При этих способах. на второй обмотке можно менять амплитуду напряжения, его фазу или оба параметра одновременно. При этом поле превращается из кругового в эллиптическое. При этом наряду с напряжениями и токами прямой последовательности фаз, создающими двигательный режим, возникает напряжение и токи обратной последовательности, вызывающие торможение. Таким образом, меняя степень асимметрии, можно регулировать скорость двигателя. Рис.81.
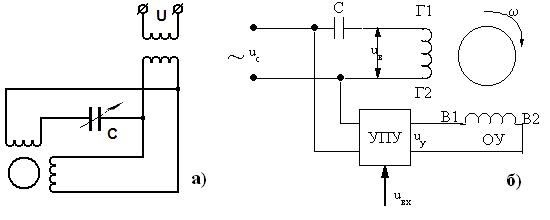
Рис. 81. Конденсаторный и управляемый двухфазные АД
При Uy=0, получим пульсирующее поле и w=0. Наиболее распространенным способом является конденсаторное управление. Чаще всего используется амплитудное несимметричное управление, когда UB=UC, а Uγ=α·Uc, где α меняется от 0 до 1. Можно получить выражения для вращающего момента при амплитудном управлении, аналогичное уравнению Клосса.
При симметрии напряжений, когда α=1, из этого уравнения получим нормальное уравнение выражение для асинхронной машины Так как в двухфазных двигателях SM>1, то при α=0, т.е. при отключении обмотки управления двигатель тормозится, и останавливается при S=1.
Механические и регулировочные характеристики асинхронного двигателя. нелинейны. Их заменяют в рабочей области прямыми:
M = b1U-b2w.
Коэффициенты b1 и b2 определяют по паспортным данным АД. В момент пуска М =Мп, w = 0, поэтому
Мп = b1∙Un и b1 = Мн/Un.
Для номинального режима аналогично получим, учитывая , что PN = MN∙wN,
MN = Мп -b2∙ wN и b2∙ = (Мп -MN)/wN.
Мы получим уравнение линеаризованной механической характеристики :
w = (b1/ b2)∙U—M/ b2.
Механические и регулировочные характеристики асинхронного двигателя показаны на рис. 82.
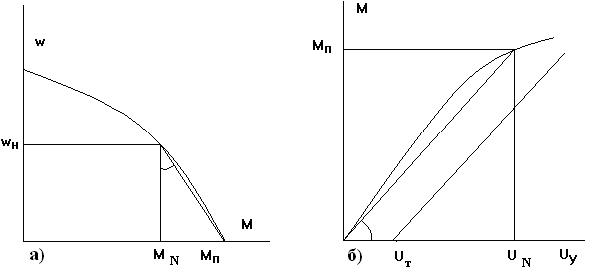
Рис. 82. Механическая и регулировочная характеристики двухфазного АД
После линеаризации асинхронный двигатель может быть представлен как линейная динамическая система, описываемая следующими уравнениями (bw = b1, bu = b2):


 .
.
Рассмотрим случай, когда сухое трение отсутствует и есть только скоростное трение, то есть МТ = F∙w. Заменив . и проведя преобразования получим:
и проведя преобразования получим:
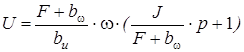 .
.
Отсюда выражение для передаточной функции
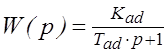 , где коэффициент передачи
, где коэффициент передачи 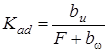 и электромеханическая постоянная времени
и электромеханическая постоянная времени 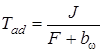
Этой передаточной функции соответствует структурная схема и переходный процесс, представленные на рис. 83.
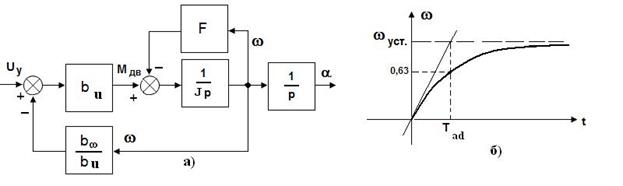
Рис. 83. Структурная схема и переходный процесс АД