


Асинхронный двигатель
Если поместить во вращающееся магнитное поле короткозамкнутую медную или алюминиевую рамку на валу электродвигателя, то она вместе с валом придет во вращение по направлению вращения поля. Явление это объясняется следующим образом. Пусть угловая скорость вращения рамки n несколько меньше угловой скорости вращения поля no (асинхронное вращение). В этом случае рамка «проскальзывает» относительно поля. Величину s = (n0—n)/n0 называют скольжением. Относительно магнитного поля рамка вращается с угловой скоростью, пропорциональной скольжению. Поэтому в ней возникает индукционный ток, пропорциональный относительной скорости вращения рамки, т. е. скольжению. По закону Ленца, индуцированный ток взаимодействует с полем так, что рамка увлекается полем.
А так как магнитное поле вращается, то это приводит к вращению рамки. Вращающий момент, действующий на рамку, пропорционален индуцированному току и тем самым скольжению. Этот вращающий момент уравновешивается внешней нагрузкой.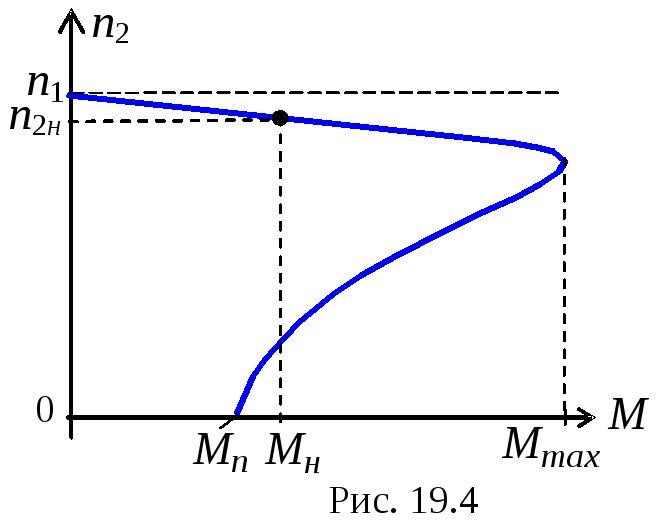 Таким образом, в установке данного типа рамка всегда вращается несколько медленнее вращения поля. Такое вращение называют асинхронным (т. е. неодновременным, несогласованным). Сам двигатель получил название асинхронного.
Таким образом, в установке данного типа рамка всегда вращается несколько медленнее вращения поля. Такое вращение называют асинхронным (т. е. неодновременным, несогласованным). Сам двигатель получил название асинхронного.
Асинхронный двигатель наиболее распространен в качестве электропривода различных механизмов благодаря своей простоте и надежности. Их применяют для привода машин и механизмов, не требующих строго постоянной частоты вращения и ее регулировки. Важнейшими достоинствами данного двигателя являются простота его устройства и большая надежность, вызванная отсутствием скользящих контактов. Двигатель имеет достаточный пусковой момент, легко реверсируется (т. е. в нем легко меняется направление вращения ротора). В результате этого асинхронные двигатели являются самыми распространенными в технике электрическими машинами. Более 60 % всей вырабатываемой в мире энергии преобразуется в механическую, в основном, с помощью асинхронных двигателей. Мощность двигателей колеблется от десятков ватт до сотен киловатт.
Асинхронный двигатель изготавливается в однофазном, двухфазном и трехфазном исполнении.
Принцип работы
Рассмотрим вращающееся поле переменного тока трехфазной цепи короткозамкнутого асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° и соединенными звездой .
Обмотки статора питаются симметричным трехфазным напряжением. Начальную фазу тока в обмотке А-х принимаем равной нулю. Тогда:
Конструкция
Асинхронный двигатель состоит из статора и ротора. Статор представляет собой литой корпус (стальной или чугунный) цилиндрической формы. Внутри статора располагается магнитопровод с вырубленными пазами, в которые укладывается статорная обмотка. Концы обмоток выводятся в клеммную коробку и могут быть соединены как треугольником, так и звездой. Корпус статора с торцов закрыт подшипниковыми щитами, в которые запрессовываются подшипники вала ротора. Ротор состоит из стального вала с напрессованным на него магнитопроводом.
По конструкции роторов двигатели делятся на две группы.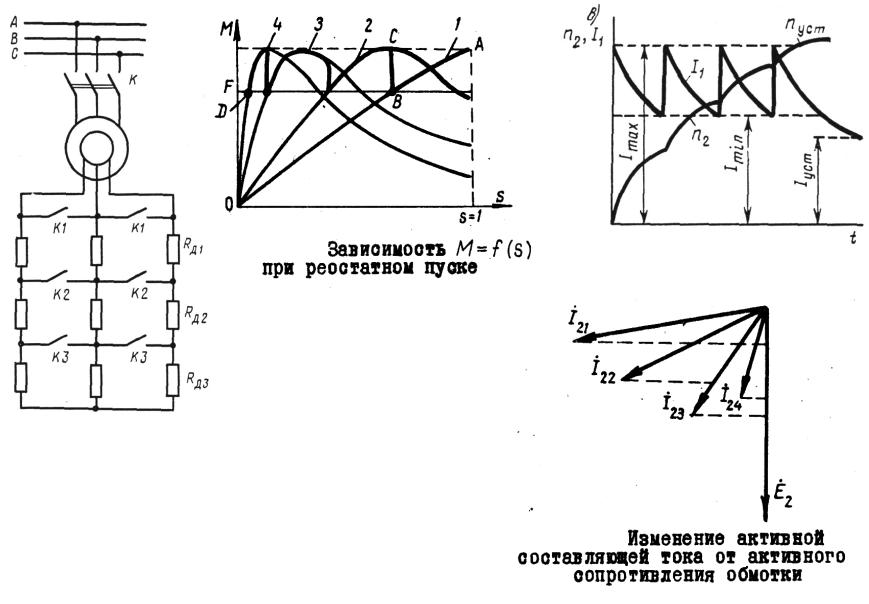 Первая — с короткозамкнутым ротором и вторая — с фазным. У двигателя с короткозамкнутым ротором в пазы заливаются алюминиевые стержни и накоротко замыкаются по торцам. У фазового ротора имеются три обмотки, соединенные в звезду. Выводы обмоток присоединены к кольцам, закрепленным на валу. К кольцам при пуске прижимаются неподвижные щетки, к которым подключаются сопротивления. В начальный момент пуска ротор находится в заторможенном состоянии, затем сопротивление уменьшается и двигатель плавно запускается, что позволяет снизить пусковой ток.
Первая — с короткозамкнутым ротором и вторая — с фазным. У двигателя с короткозамкнутым ротором в пазы заливаются алюминиевые стержни и накоротко замыкаются по торцам. У фазового ротора имеются три обмотки, соединенные в звезду. Выводы обмоток присоединены к кольцам, закрепленным на валу. К кольцам при пуске прижимаются неподвижные щетки, к которым подключаются сопротивления. В начальный момент пуска ротор находится в заторможенном состоянии, затем сопротивление уменьшается и двигатель плавно запускается, что позволяет снизить пусковой ток.
К обмоткам статора подводится трехфазное напряжение, а ротор вращается посредством вращающегося магнитного поля, создаваемого системой трехфазного тока.
В момент времени t1: . Если ток фазы А положителен, т.е. течет от начала к концу, то, пользуясь правилом правоходового винта, можно найти картину распределения магнитного поля для времени t1.
В момент времени t2 вектор результирующей магнитной индукции Вm развернется на угол α1 и далее по часовой стрелке с периодом обращения 360°. Для данного примера угол α1 = 60°.
Для данного примера угол α1 = 60°.
Таким образом, магнитная индукция представляет собой вращающееся поле с амплитудой
За период поле делает один оборот, , (где f = 50 Гц), и является промышленной частотой питающего переменного напряжения и тока.
При синусоидальном характере вращающегося поля его скорость no равна отношению αf/p (где р — число пар полюсов). В рассматриваемом примере р = 1 и частота вращения равна соответственно 3000 оборотам в минуту. Если число катушек в каждой фазе увеличить в два раза, а сдвиг фаз между токами сохранить 120°, то частота вращения уменьшится в два раза за счет увеличения числа пар полюсов. Особенностью короткозамкнутого асинхронного двигателя является наличие постоянной частоты вращения поля статора, определяемой числом пар полюсов.
Если поменять местами любые две фазы, то возникнет поле обратной последовательности и ротор начнет вращаться в другую сторону.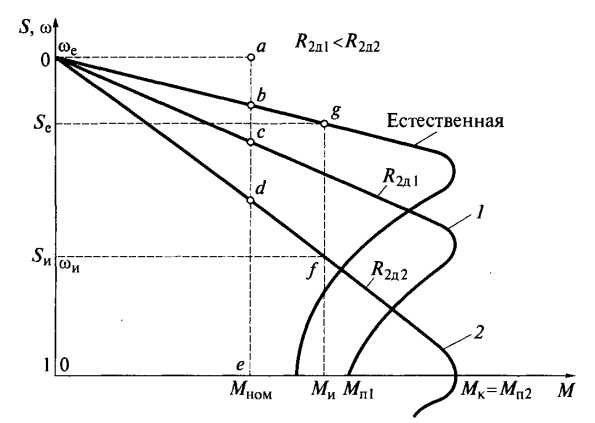 Еще одной особенностью асинхронных двигателей является разность частоты вращения полей статора no и ротора n, что делает возможным их электромагнитное взаимодействие. При этом поле ротора будет как бы скользить относительно поля статора
Еще одной особенностью асинхронных двигателей является разность частоты вращения полей статора no и ротора n, что делает возможным их электромагнитное взаимодействие. При этом поле ротора будет как бы скользить относительно поля статора
где s — скольжение, при номинальной мощности двигателя скольжение составляет 0,01-0,03.
Основное вращающееся магнитное поле индуцирует в обмотках статора и ротора ЭДС, аналогично трансформатору, так как при разомкнутом роторе асинхронный двигатель представляет собой трансформатор в режиме холостого хода:
где индекс 1 относится к параметрам статора, а 2 — к параметрам ротора; Kобм — обмоточные коэффициенты, определяемые способом укладки обмоток (петлевая или волновая). Kобм=0,92-0,98; E2s=E2s; E2 — действующее значение ЭДС неподвижного ротора при s = 1; f2=f1s.
В асинхронном двигателе кроме основного магнитного потока создаются потоки рассеяния.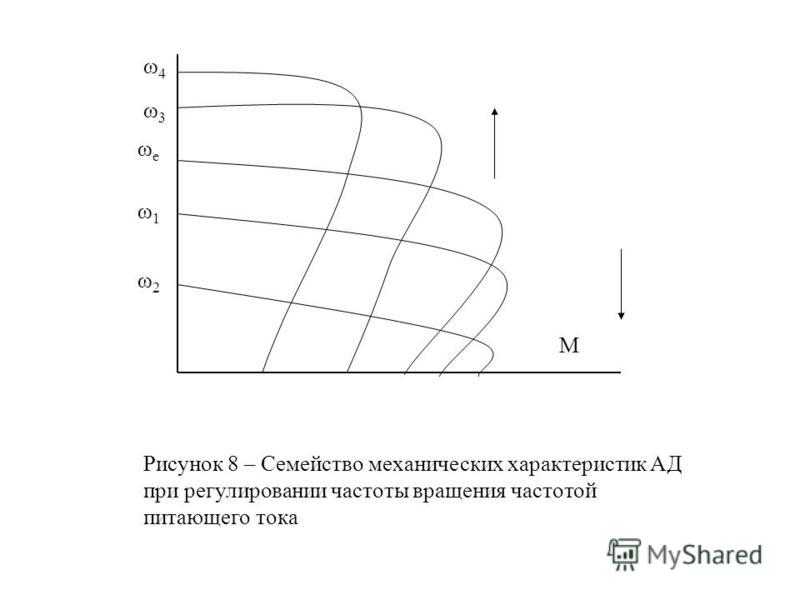 Один охватывает проводники статора, другой — ротора. Потоки рассеяния характеризуются соответствующими индуктивными сопротивлениями X1 и X2s.
Один охватывает проводники статора, другой — ротора. Потоки рассеяния характеризуются соответствующими индуктивными сопротивлениями X1 и X2s.
Уравнения электрического состояния фаз обмоток статора и ротора:
Момент асинхронного двигателя
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил
где
Cм — конструктивная постоянная;
φ2s — фазовый сдвиг между током и магнитным потоком.
Отношение максимального момента Mmax к номинальному Mн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
Потери в асинхронном двигателе
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
где К = 2,9-3,6 определяется диаметром статора D1.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95.
Рабочий момент двигателя пропорционален квадрату напряжения, что необходимо учитывать при включении двигателя в протяженных распределительных сетях. Номинальному моменту соответствует номинальное скольжение, а пусковому — sп.
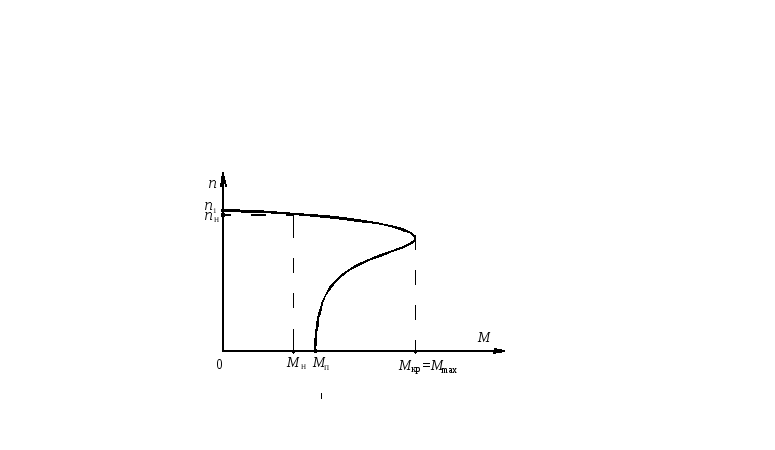
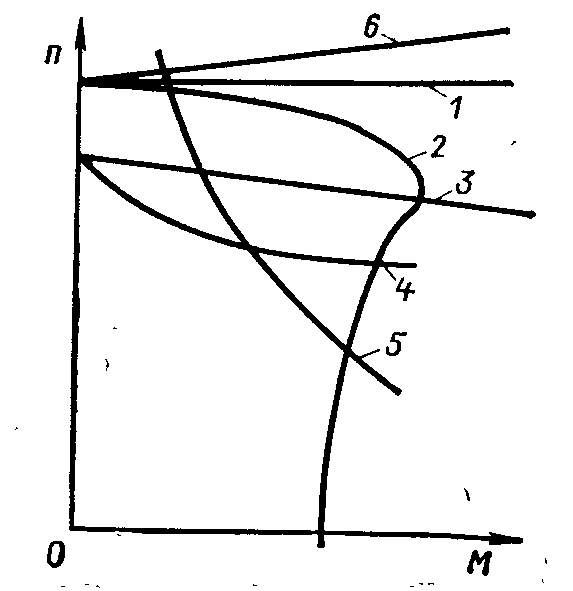
Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке.
На участке от 0 до Mmax двигатель работает в устойчивом режиме, а участок от Sk называется режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска.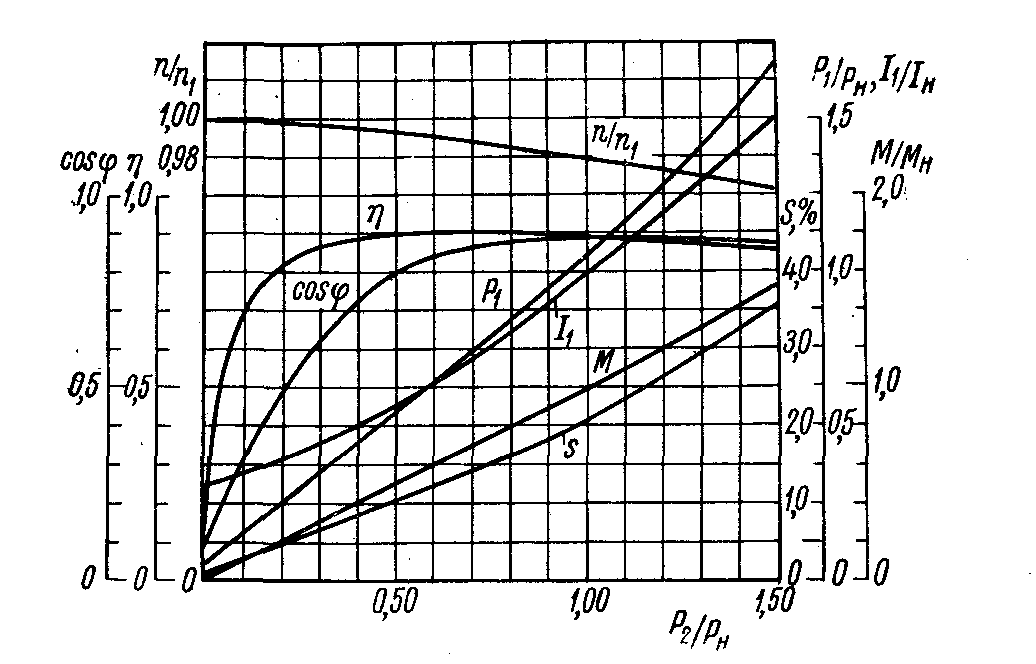 Пусковые свойства двигателя определяются соотношением пускового момента Mп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Пусковые свойства двигателя определяются соотношением пускового момента Mп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
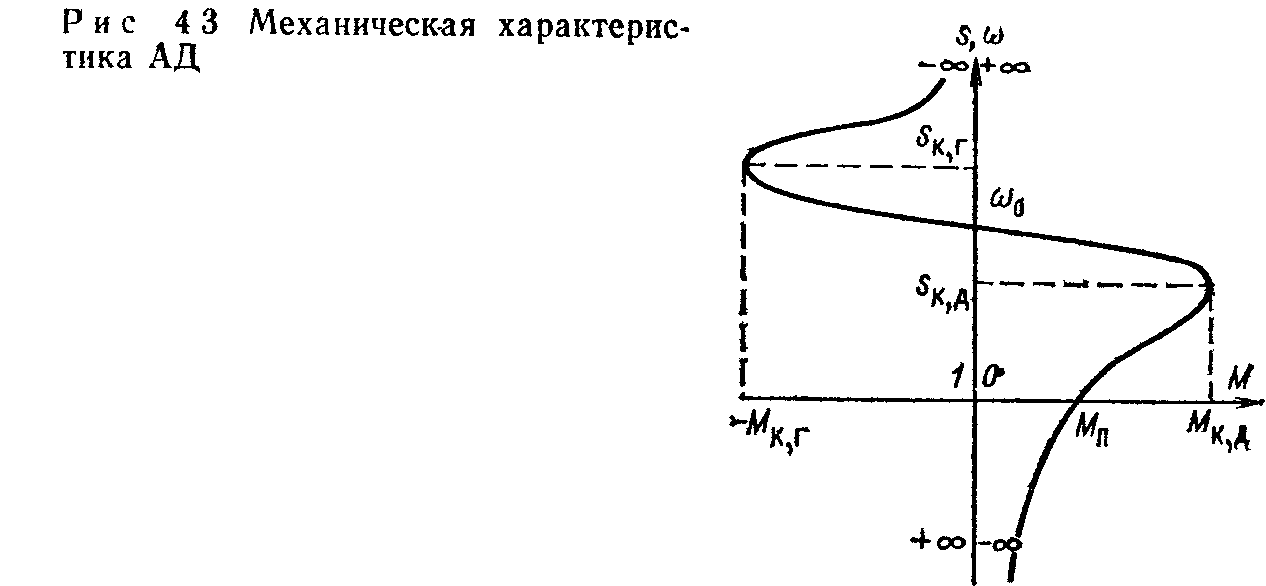
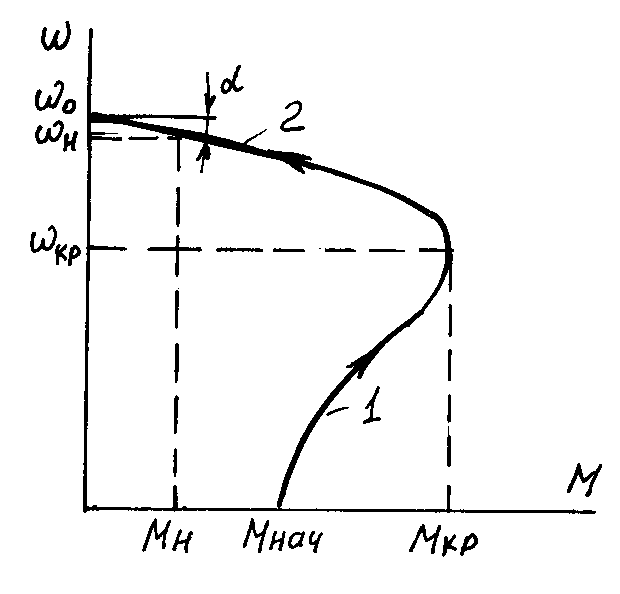
Механическая характеристика асинхронного двигателя
Зависимость скорости вращения от нагрузки на валу двигателя называется механической характеристикой асинхронного двигателя.
Участок АВ механической характеристики соответствует устойчивому режиму работы асинхронного двигателя. Увеличение нагрузки (тормозного момента) ведет к некоторому снижению частоты вращения ротора, что вызывает увеличение вращающего момента. При превышении тормозным моментом критического, двигатель останавливается. Точка В на графике соответствует точке критического или опрокидывающего момента.
Увеличение нагрузки (тормозного момента) ведет к некоторому снижению частоты вращения ротора, что вызывает увеличение вращающего момента. При превышении тормозным моментом критического, двигатель останавливается. Точка В на графике соответствует точке критического или опрокидывающего момента.
Регулирование частоты вращения
Регулирование частоты вращения может быть осуществлено тремя способами: изменением частоты питающего напряжения, переключением числа пар полюсов и изменением скольжения.
Для регулирования частоты вращения двигателей с короткозамкнутым ротором в настоящее время широко используются частотные преобразователи с микропроцессорным управлением.
Тормозные режимы
Тормозные режимы возникают в машине при определенных условиях или создаются искусственно с целью ускорения процесса остановки двигателя. Торможение может быть:
- генераторное с отдачей энергии в сеть;
- противовключением;
- динамическое.
Генераторным тормозным режимом называется режим работы двигателя, когда под действием внешнего момента ротор двигателя вращается в том же направлении, что и магнитное поле, но с большей скоростью.
Тормозной режим противовключения возникает в том случае, когда под действием внешнего момента, приложенного к валу двигателя, ротор вращается в противоположную сторону относительно вращающегося магнитного поля.
Динамический тормозной режим получается при отключении обмотки статора от сети трехфазного тока и подключении ее на время торможения к источнику энергии постоянного тока.
Выбор двигателя
Расчетные формулы для выбора двигателя имеют вид:
Выбор двигателя по каталогу осуществляется следующим образом. По заданному моменту рабочего механизма и частоте вращения определяется необходимая мощность. После этого определяются условия окружающей среды, выбирается исполнение по типу монтажа и высоте оси рабочего вала двигателя. Зная эти параметры, по каталогу проверяют необходимую перегрузочную способность, КПД, массу и момент инерции.
Для шахтных условий используются двигатели взрывозащищенного исполнения; для крановых механизмов — двигатели с повышенным скольжением и т. д.
д.
В бытовых приборах используются однофазные двигатели. Однофазный двигатель отличается от трехфазного тем, что его статорная обмотка подключается к однофазному источнику питания. Ротор выполняется короткозамкнутым. На статоре размещаются две обмотки, оси которых смещены друг относительно друга на 90 электрических градусов. Одна называется рабочей, а другая -пусковой.
Рабочие характеристики асинхронного двигателя
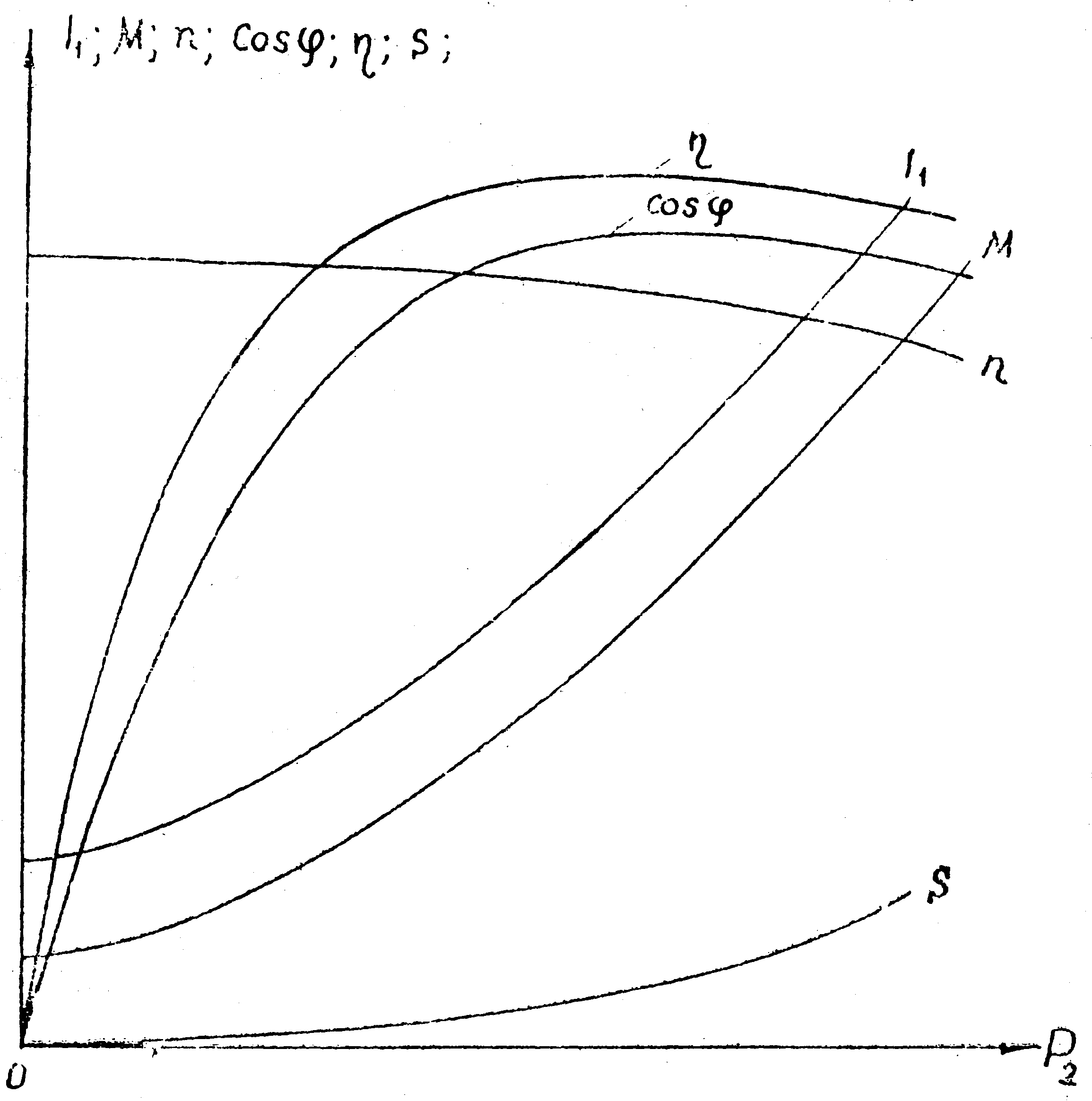
Рабочими характеристиками асинхронного двигателя являются зависимости от мощности на валу Р2 таких параметров, как момент, частота вращения, ток статора, КПД и cosφ. Анализ характеристик показывает, что частота вращения ротора падает с увеличением нагрузки, а момент пропорционален ей. Ток статора изменяется по нелинейному закону, что связано с магнитной системой двигателя и при Р2=0 определяется током холостого хода, составляющего до 40% его номинального значения.
В системах управления используются двигатели, в которых одна из обмоток статора постоянно подключена к сети переменного тока (обмотка возбуждения), а ко второй (обмотка управления) подводится напряжение управления.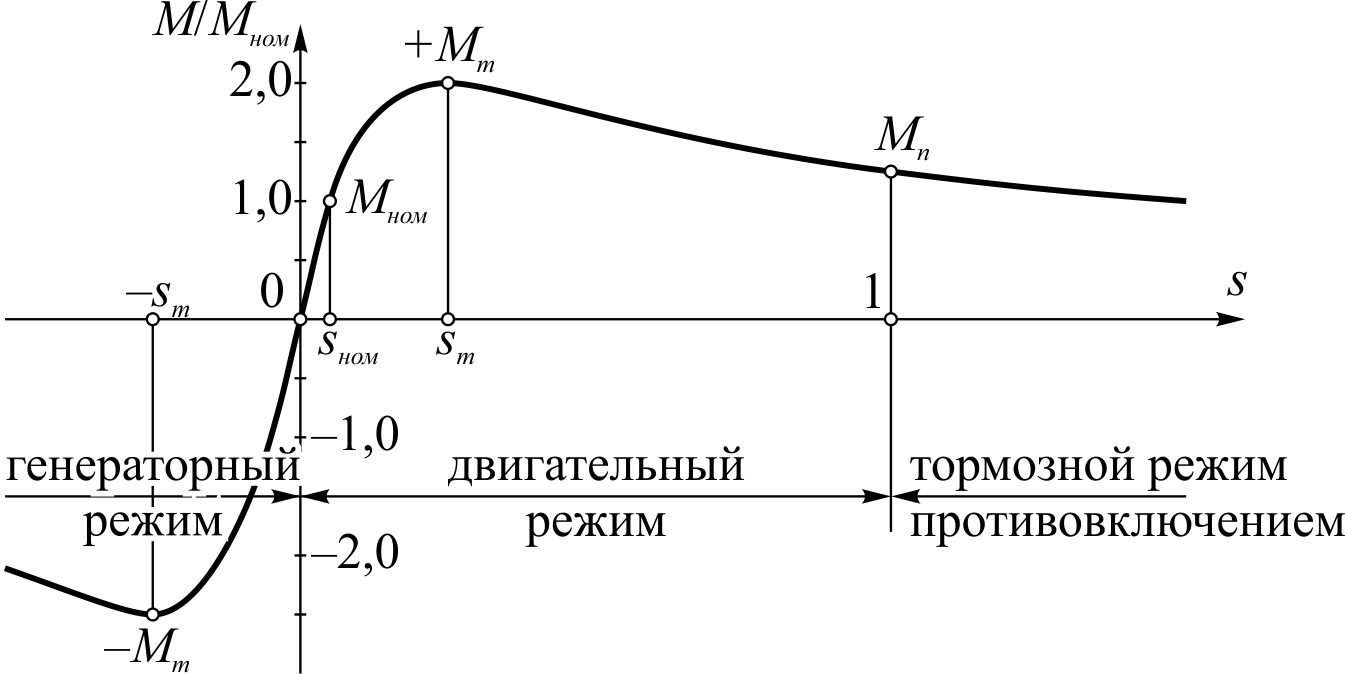 Такие двигатели относятся к классу микромашин.
Такие двигатели относятся к классу микромашин.
Микромашины используются в информационных системах, где они выполняют функции первичных преобразователей для вычислительных операций в системах автоматики и телемеханики.
Одним из примеров является сельсин, предназначенный для передачи на расстояние угловых перемещений валов, механически не связанных друг с другом. По конструкции сельсины делятся на контактные и бесконтактные. Контактные сельсины выполняются в двух вариантах. В одном обмотка возбуждения располагается на роторе, а трехфазная обмотка, называемая обмоткой синхронизации, в пазах статора. В другом варианте наоборот. При включении обмотки возбуждения сельсина на однофазное напряжение ток создает пульсирующее магнитное поле, которое индуцирует в каждой фазе обмотки синхронизации переменную ЭДС. Действующее значение ЭДС каждой фазы зависит от расположения осей этих фаз относительно оси потока возбуждения.
В простейшем случае схема дистанционной передачи угловых перемещений состоит из двух одинаковых сельсинов, у которых одноименные зажимы обмоток синхронизации соединены проводами линии связи, а на обмотки возбуждения подается напряжение сети. Один из сельсинов называют сельсин-датчиком, другой — сельсин-приемником.
Один из сельсинов называют сельсин-датчиком, другой — сельсин-приемником.
Механические характеристики асинхронных электродвигателей (лекция 4)
1. Механические характеристики асинхронных электродвигателей
Курс1.Часть2. Регулированиечастоты вращения
электроприводов постоянного и
переменного тока
Механические характеристики
асинхронных
электродвигателей
1.
2.
3.
1
Модель асинхронного электродвигателя.
Естественная механическая характеристика
асинхронного электродвигателя.
Управление пуском асинхронных
электродвигателей. Расчет пусковых реостатов
2. Модель асинхронного электродвигателя.
Достоинства асинхронного электродвигателя:простота конструкции;
низкая металлоемкость;
допускает прямой пуск от сети;
повышенная надежность;
простота в ремонте и эксплуатации.
2
3. Модель асинхронного электродвигателя.
Асинхронного электродвигателиизготавливают двух типов с фазным
и короткозамкнутым ротором.

0
3
4. Модель асинхронного электродвигателя.
Электродвигатели с короткозамкнутым роторомимеют обмотку ротора в виде «беличьей клетки». Она
помощи короткозамкнутых колец. К ним подсоединены
стержни проводники, которые размещены в пазах
сердечника ротора.
4
5. Модель асинхронного электродвигателя.
а)б)
в)
5
г)
6. Модель асинхронного электродвигателя.
Пусть на статоре расположена катушка А-Х покоторой протекает переменный ток
iА = Im sin t; = 2 f1.
МДС FА, созданная этим током, будет пульсировать по
оси обмотки
FА = Fm sin t.
6
7. Модель асинхронного электродвигателя.
Если добавить катушку В-Y, расположенную под углом900 и пропускать по ней ток
iВ = Im cos t, то
МДС FВ будет пульсировать по оси этой обмотки
FВ = Fm cos t.
7
8. Модель асинхронного электродвигателя.
Вектор результирующей МДС имеет модульF
2
FA
FB
Fm const .
Его фаза определится из условия
FA
tg
tg t
FB
Таким образом, вектор результирующей МДС
вращается с угловой скоростью
8
2 f 1 .
9. Модель асинхронного электродвигателя.
Частота вращения магнитного поля n1 как иугловая скорость ω1 находится в строгой зависимости от
частоты подводимого напряжения сети f1 и числа пар
полюсов р двигателя:
60 f 1
п1
,
p
9
2 f 1
1
.
p
10. Модель асинхронного электродвигателя.
Наведение в обмотке ротора ЭДС и появлениевращающего или тормозящего момента асинхронного
Двигателя возможно только при наличии разности
поля статора и ротора. Это различие оценивают в
относительных единицах и называют скольжением
10
1 2
S
.
1
11. Естественная механическая характеристика асинхронного электродвигателя
I1Uф
Х1
Х0
R1
I 2
Х 2
R2
S
R0
Упрощенная схема замещения асинхронного электродвигателя
11
12.
 Естественная механическая характеристика асинхронного электродвигателя 2
Естественная механическая характеристика асинхронного электродвигателя 2 Uф
R2 2
( R1
) ( X 1 X 2 )2
S
Вращающий момент асинхронного двигателя может
быть определен из выражения потерь :
1 S 3( 2
12
3( 2 ) 2 R2
) R2
.
1 S
3U ф 2 R2
2
R2 2
2
1 ( R1
) ( X 1 X 2 ) S
S
13. Естественная механическая характеристика асинхронного электродвигателя
213
1
1
2
14. Естественная механическая характеристика асинхронного электродвигателя
R2/ R12 S 2 ( X 1 X 2/ )2 S 2dM 3 U ф R2
0,
2
/
2
/
2
2
dS
1
( R1 S R2 ) ( X 1 X 2 ) S
2
/
R2/ R12 S 2 ( X 1 X 2/ )2 S 2 0 R2/ R12 S 2 ( X 1 X 2/ )2 S 2
sк
Mк
14
R2
R12 ( X 1 X 2 )2
3U 2
2 0 R1 R12 ( X 1 X 2 )2
15. Естественная механическая характеристика асинхронного электродвигателя
Разделив уравнение механической характеристики навыражение для максимального момента получим
2М к ( 1 Sк )
R1
М
, /.

S Sк
R2
2 S к
Sк
S
Приняв
2 S к q ,
15
М дв
М кр ( 2 q )
S кр
S
q
S кр
S
.
16. Естественная механическая характеристика асинхронного электродвигателя
1617. Естественная механическая характеристика асинхронного электродвигателя
Характерными точками механической характеристикиявляются:
• пусковая точка – М=Мп; ω=0;
• точка провала на пусковой ветви, угловая скорость,
• в которой соответствует скольжению S=0,8; М=Ммин;
• критическая точка с координатами ωк, Мк;
• номинальная точка – ωн, Мн;
• точка холостого хода – ω=ω1; М=0.
17
18. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Кратность начального пускового момента двигателясоставляет
Мп
kм
1…1,8
Мн
а кратность начального пускового тока
Iп
k I 5…7
Iн
Отсутствие пропорциональности между моментом
двигателя и током статора во время пуска объясняется

18
19. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Для повышения начального пускового момента иснижения пускового тока применяются
короткозамкнутые двигатели специальных конструкций,
у которых ротор имеет две клетки, расположенные
концентрически, или глубокие пазы с высокими и
узкими стержнями.
19
20. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
У двигателей с контактными кольцами начальныйпусковой момент увеличивается по мере возрастания
до известных пределов сопротивления реостата.
величина начального пускового момента может быть
доведена до величины критического момента.
уменьшается.
20
21. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
MнК расчету пускового реостата асинхронного двигателя
21
22. Управление пуском асинхронных электродвигателей.
 Расчет пусковых реостатов Методика расчета:
Расчет пусковых реостатов Методика расчета:•на характеристике Мдв=f( ), наносятся границы пуска;
•через точки d и d1 естественной механической
характеристики, соответствующие значениям моментов
Мпуск макс и Мпуск мин, проводится прямая до пересечения
с линией синхронной скорости (S=0) в точке t;
•из полученной точки проводится пусковая
характеристика до точки с координатами Мпуск макс, ω=0;
22
23. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
•в точке с координатами Мпуск мин, ω=ω3 происходитотключение первой ступени реостата;
•в точке с координатами Мпуск мин, ω=ω2 происходит
•отрезок [ed] пропорционален величине активного
сопротивления одной фазы ротора. Соответственно
отрезок [dc] в относительных единицах пропорционален
сопротивлению первой ступени пускового реостата,
отрезок [bс] – второй ступени.
23
24. Управление пуском асинхронных электродвигателей.
 Расчет пусковых реостатов Измерив длины этих отрезков, определяют величины
Расчет пусковых реостатов Измерив длины этих отрезков, определяют величинысопротивления каждой ступени пускового реостата:
R1
где
24
dc R
ed рот
R рот
U 2 н Sн
3I 2 н
.
R2
или
cb R
ed рот
R рот
Рн S н
3 2н н
2
.
25. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
При реостатном пуске асинхронного электродвигателяступеней пускового сопротивления может
производиться автоматически при помощи контакторов,
управление включением которых может осуществляться
в функции времени, частоты вращения, тока или
частоты тока ротора.
25
26. Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
Для обеспечения заданной диаграммы пуска необходимафиксация моментов подачи команд на включение
контакторов. Это может осуществляться следующими
способами:
•путем отсчета промежутков времени Δt1, Δt2, Δt3,
для чего используются реле времени;
• посредством контроля значения скорости двигателя
или ЭДС ротора, что может быть сделано при помощи
датчиков скорости или ЭДС;
•посредством контроля частоты тока ротора .
26
27. Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
SB1KM1
KM1
SB2
KM1
KT1
M2
KM4
M1
KM4
KM4
KT1:1
KT1:2
KM2
KM3
R31…R33
KM3
R21…R23
27
KM2
R11…R13
KT1:3
KM4
Схема электрическая принципиальная управления
пуском асинхронного двигателя в функции времени
28. Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
Время пребывания на каждой ступени пусковогореостата определяется по следующему соотношению:
ti
о S нi
Мн
ln
М дин 1i
М дин 2i
,
Мдин 1i=Мпуск макс–Мсi; M дин 2i=Мпуск мин–Мсi.
Снятие рабочих характеристик трехфазного асинхронного электродвигателя с короткозамкнутым ротором
лабораторная работа 3Снятие рабочих характеристик трехфазного асинхронного электродвигателя с короткозамкнутым ротором
Цель
работы.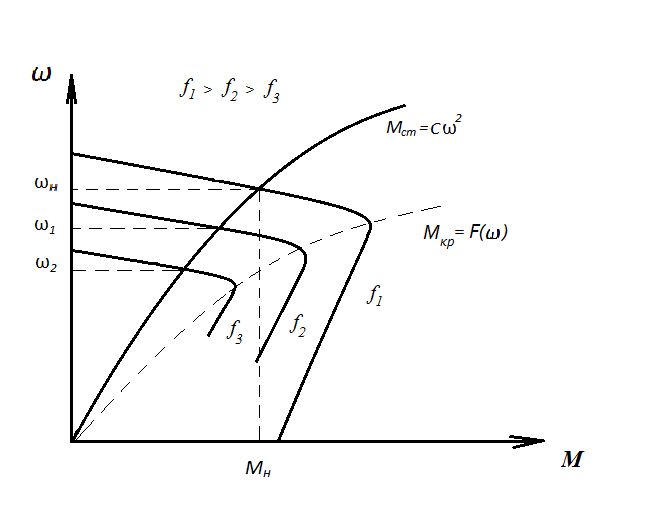 1.
Изучить устройство трехфазного
асинхронного двигателя с короткозамкнутым
ротором.
1.
Изучить устройство трехфазного
асинхронного двигателя с короткозамкнутым
ротором.
2. Испытать асинхронный двигатель с помощью электро-магнитного тормоза.
3. Построить по опытным данным рабочие характеристики асинхронного двигателя.
Общие теоретические положения.
Асинхронный двигатель
Двигатель имеет две основные части: неподвижную — статор
вращающуюся —ротор
Статор состоит из чугунного, стального или
алюминиевого корпуса, внутри которого
находится полый цилиндр, собранный из
тонких изолированных друг от друга
листов электротехнической стали.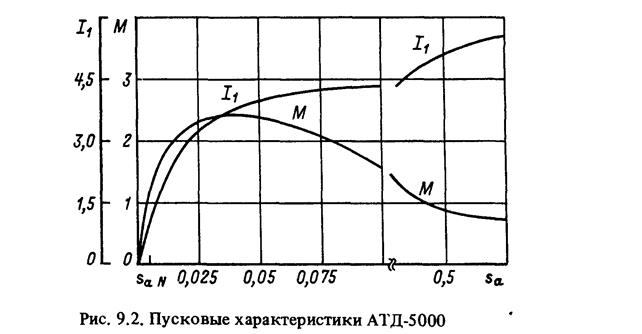
На корпусе двигателя имеется панель с зажимами, с помощью которых обмотка присоединяется к трехфазной сети. К каждому зажиму подключен соответствующий вывод обмотки. Для зажимов приняты следующие обозначения: зажимы, к которым подключены начала обмоток, обозначают С1 — С3; зажимы, к которым подсоединены концы обмоток, — С4 — С6
Обмотки двигателей малой и средней
мощности изготовляют на напряжения
380/220 и 220/127 В. Напряжение, указанное в
числителе, соответствует соединению
обмоток звездой, в знаменателе—треугольником.
Таким образом, один и тот же двигатель
при соответствующей схеме соединения
его обмоток может быть включен в сеть
на любое указанное в паспорте напряжение.
Ротор представляет собой цилиндр, собранный, так же как и сердечник статора, из отдельных листов электротехнической стали, надежно укреплен на валу машины и имеет в пазах, расположенных вблизи его поверхности, короткозамкнутую обмотку.
Подключим обмотку статора к сети трехфазного переменного тока (рис. 10.1).
Внутри статора возникает магнитное поле, вращающееся с частотой
n0 = 60f/p ,
где f — частота токов в обмотке статора;
р— число пар полюсов обмотки статора.
Магнитные линии поля пересекают обмотку неподвижного ротора и индуцируют в ней ЭДС. Под действием ЭДС в обмотке ротора протекает ток. Ток ротора, взаимодействуя с вращающимся магнитным полем, создает вращающий момент, под действием которого ротор начинает вращаться в ту же сторону, что и поле с частотой
n = n0 (1 — s),
где s — скольжение, определяемое по формуле: s = (n0 — n)/n0
При
работе электродвигателя без нагрузки
(холостой ход) скольжение очень мало. С
увеличением нагрузки на валу двигателя
частота вращения ротора уменьшается,
а скольжение увеличивается. Скольжение
асинхронного двигателя в зависимости
от нагрузки меняется незначительно
(1—6 %). Чем больше мощность двигателя,
тем меньше его скольжение. Частота
вращения ротора может быть измерена с
помощью тахометра. Для изменения
направления вращения (реверсирование)
асинхронного двигателя следует поменять
местами два любых провода из трех,
идущих к обмоткам статора двигателя.
С
увеличением нагрузки на валу двигателя
частота вращения ротора уменьшается,
а скольжение увеличивается. Скольжение
асинхронного двигателя в зависимости
от нагрузки меняется незначительно
(1—6 %). Чем больше мощность двигателя,
тем меньше его скольжение. Частота
вращения ротора может быть измерена с
помощью тахометра. Для изменения
направления вращения (реверсирование)
асинхронного двигателя следует поменять
местами два любых провода из трех,
идущих к обмоткам статора двигателя.
Зависимость между вращающим моментом M и скольжением s называют механической характеристикой (рис. 10.2). В начальный момент пуска s =1 и п = 0, вращающий пусковой момент двигателя относительно невелик. При некотором скольжении, называемом критическим, вращающий момент двигателя максимальный. В режиме холостого хода, когда двигатель не нагружен, а механическими потерями (на трение) можно пренебречь, s = С. Работе двигателя с номинальной нагрузкой соответствует точка A на механической ха-
А В С
Рис 10. 1. Схема
присоединения трехфазного асинхронного
двигателя с корот-козамкнутым ротором
к питающей сети
1. Схема
присоединения трехфазного асинхронного
двигателя с корот-козамкнутым ротором
к питающей сети
Рис. 10.2. График зависимости вращающего момента асинхронного двигателя от скольжения
Мном М
Рис. 10.3. Характеристики асинхронного двигателя:
а — механическая; б — рабочие
рактеристике. При скольжении Sном двигатель развивает номинальный момент, значение которого (Н-м) вычисляют по формуле:
Мном = 9550 Р2ном / nном
где Р2ном — номинальная мощность двигателя, кВт;
nном — номинальная частота вращения ротора, мин-1
Свойства
асинхронного двигателя определяют по
его механической характеристике п
= f (М) (рис.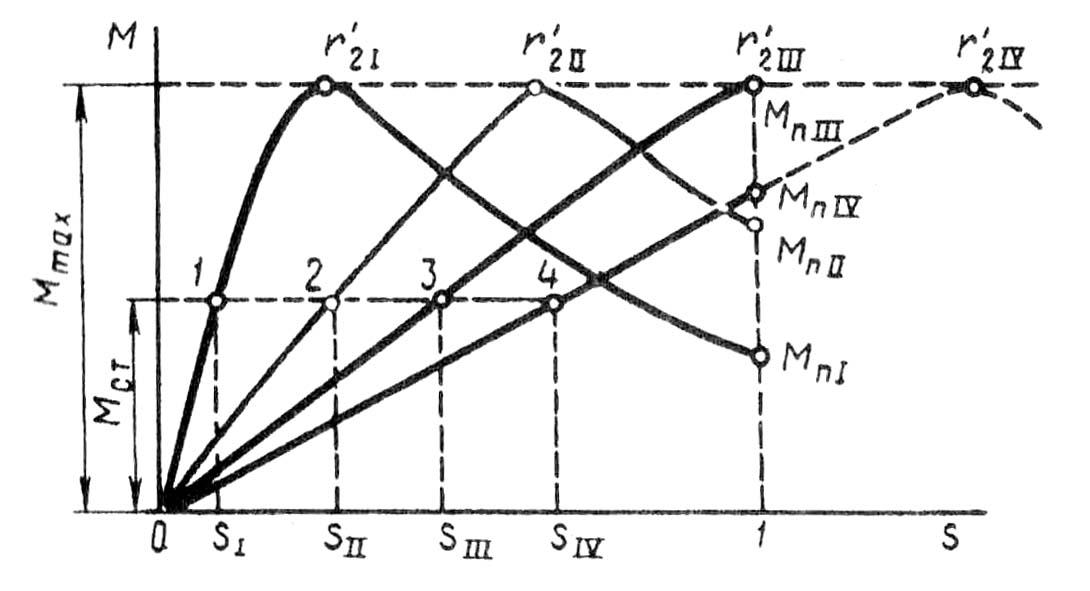 10.3, а) и по рабочим характеристикам п
= f (Р2),
10.3, а) и по рабочим характеристикам п
= f (Р2),
s = f(Рг), М = f (Р2), I = f(Р2), cos = f (Р2), — f(Р2) при напряжении U = const и частоте тока I = const (рис. 10.3, б), где М и Р — соответственно момент и мощность на валу двигателя.
Прямой
пуск асинхронного двигателя с
короткозамкнутым ротором можно
производить включением рубильника
(магнитного пускателя) и т.п. (см. рис.
10. 1). При прямом пуске на двигатель
подается полное напряжение сети. При
таком способе пуска возникают большие
пусковые токи, в 2—7 раз превышающие
номинальные токи двигателей. Однако в
этом случае на валу дви-
1). При прямом пуске на двигатель
подается полное напряжение сети. При
таком способе пуска возникают большие
пусковые токи, в 2—7 раз превышающие
номинальные токи двигателей. Однако в
этом случае на валу дви-
Рис. 10.4. Устройство электромагнитного (индукционного) тормоза:
1 — электромагниты; 2 — стальной диск; 3 — груз; 4—шкала: 5— стрелка; 6 — вал испытуемой машины
—Тормоз
Тахометр
Рис. 10.5. Схема для исследования трехфазного асинхронного двигателя с короткозамкнутым ротором
гателя
развивается начальный вращающий момент
М п,
составляющий 1,2— 2,2 номинального момента Мном, что
достаточно для разгона большинства
устройств, пускаемых без нагрузок.
Трехфазный асинхронный двигатель с короткозамкнутым ротором характеризуется такими номинальными величинами:
мощностью Р2НОМ на валу,
линейным напряжением Uном ,
линейным током Iном.
типом соединения фаз статора,
частотой переменного тока fном,
частотой вращения ротора nном,
коэффициентом мощности cos ном
КПД ном — которые приведены на табличке машины.
Для
нагрузки электродвигателей широко
применяют электромагнитные
(индукционные)
тормозные устройства (рис. 10.4, где 1—
электромагниты,
2 —
стальной диск, 3 —
груз, 4—
шкала, 5 — стрелка, 6—
вал испыту
емой машины).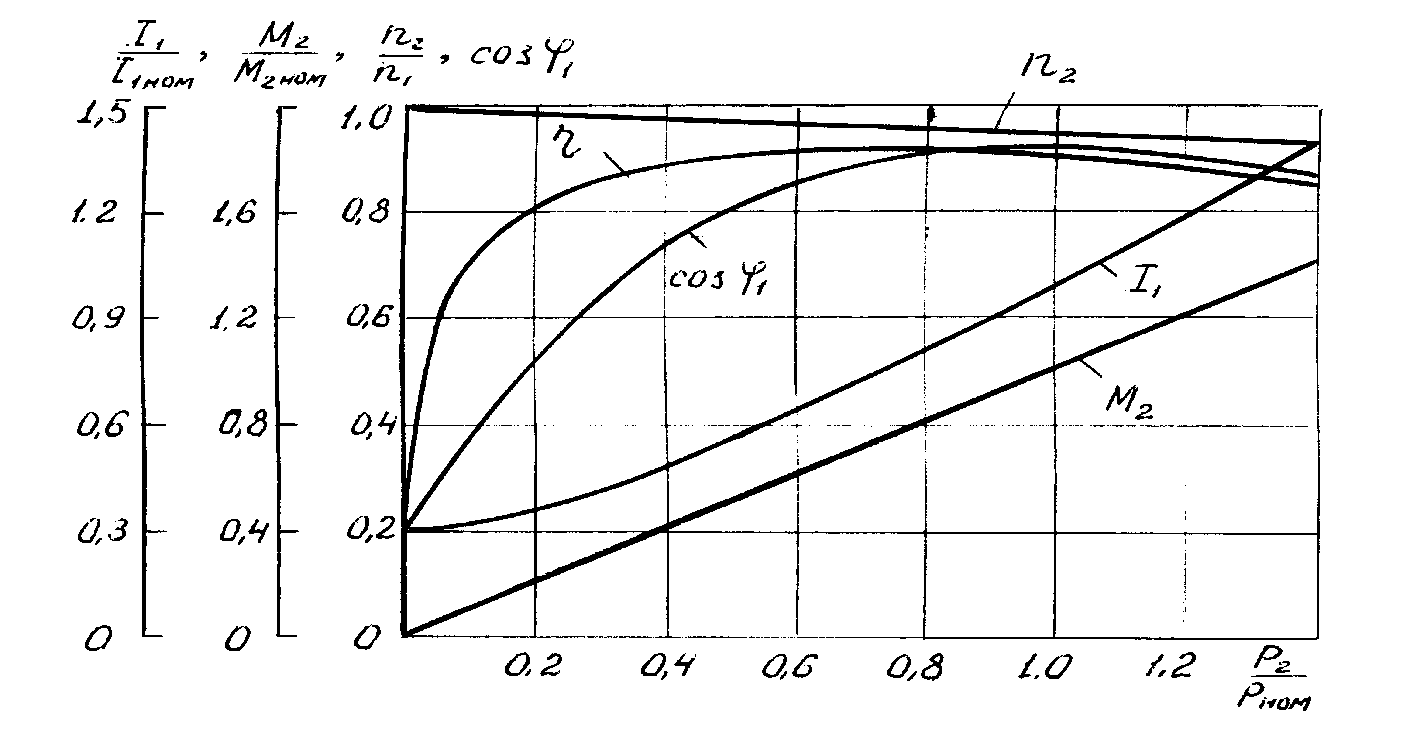 При некотором
угле поворота груза со стрелкой вращающий
и
При некотором
угле поворота груза со стрелкой вращающий
и
противодействующий моменты
уравновешиваются и по заранее
проградуиро-
ванной шкале в ньютон-метрах
определяют вращающий момент, развиваемый
на
валу электродвигателя.
Мощность Р2 на валу (кВт) определяется по формуле: Р2 = Мn / 9550
Коэффициент мощности вычисляют по формуле: cos = Р1 / 3 UI
КПД определяют по формуле: = Р2 / Р1,
где Р1 — активная мощность, потребляемая двигателем электрической энергии из трехфазной сети;
U
и I —линейные
напряжения и ток.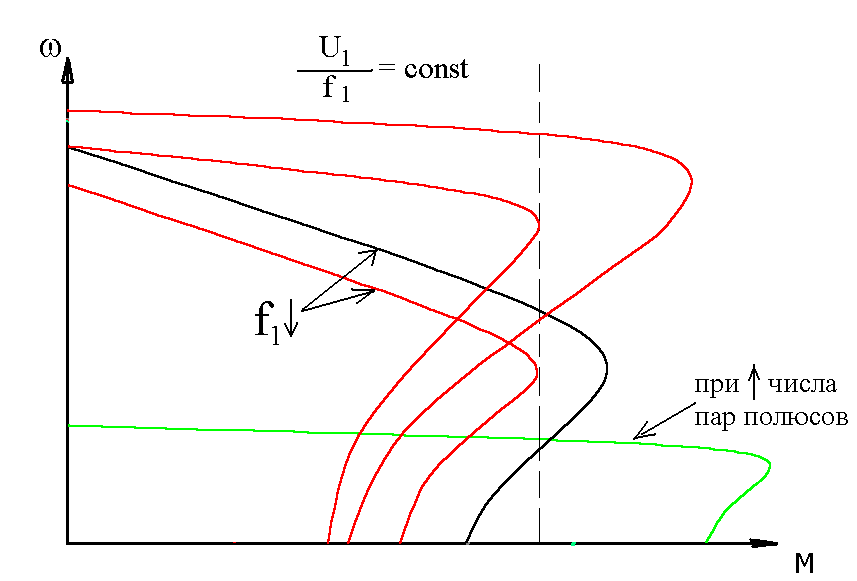
Приборы и оборудование:
источники- питания (трехфазная сеть переменного тока; сеть постоянного тока),
трехфазный асинхронный двигатель с короткозамкнутым ротором,
амперметр и вольтметр электромагнитной системы,
двухэлементный ваттметр ферродинамической системы,
реостат,
тахометр,
электромагнитный тормоз,
трехполюсный и двухполюсный автоматические выключатели,
соединительные провода.
Порядок выполнения работы.
Ознакомиться с приборами, аппаратурой и оборудованием, предназ-наченными для выполнения лабораторной работы, записать их технические характеристики.
Собрать электрическую схему для исследования асинхронного двига-
теля (рис. 10.5)
и представить ее для проверки
преподавателю.
10.5)
и представить ее для проверки
преподавателю.Произвести пуск двигателя без нагрузки на его валу (холостой ход).
Показания всех приборов записать в табл. 10.1Постепенно нагружать двигатель с помощью электромагнитного тор-
моза, для этого ступенями изменять ток в обмотках электромагнитов тормоза с помощью делителя напряжения R. Записать показания всех приборов в табл. 10.1 для 6—7 различных случаев возрастающей нагрузки.
 10.5)
и представить ее для проверки
преподавателю.
10.5)
и представить ее для проверки
преподавателю. 5.
Произвести необходимые расчеты,
результаты записать в табл. 10.1.
Используя
полученные результаты, построить в
одной системе координат рабочие
характеристики: п
= f (Р2), s = f(Рг), М = f (Р2),
I = f(Р2), cos = f (Р2), — f(Р2)
Составить отчет по результатам выполненной работы.

Таблица 10.1.
№ п/п | Режим работы | Данные наблюдений | Результаты вычислений | ||||||||
U, В | I. А | Р, кВт | n, мин-1 | М, Нм | n0–n мин-1 | S, % | cos | Р2, кВт | | ||
1. | |||||||||||
2. | |||||||||||
3. | |||||||||||
4. | |||||||||||
5. | |||||||||||
6. | |||||||||||
7. | |||||||||||
Контрольные вопросы.
Из каких двух основных частей состоит асинхронный электродвигатель?
Каков принцип действия асинхронного двигателя?
Что следует предпринять, чтобы осуществить реверсирование двигателя?
Как рассчитать номинальный момент асинхронного двигателя по его номинальным данным?
Во сколько раз можно кратковременно перегружать асинхронный двигатель, не опасаясь затормаживания ротора?
Какими номинальными величинами характеризуется трехфазный асинхронный двигатель с короткозамкнутым ротором?
Расчет и построение естественных электромеханической и механической характеристик двигателя с последовательным возбуждением, страница 3
Данные
двигателя: U1н= 380/220; Pн= 11 кВт; nн= 953 об/мин; R1= 0.415 Ом;
x1 = 0.465 Ом; R2= 0.132 Ом; x2= 0.27 Ом; Е2н= 200 В; I2н
= 35.4 А; .
Решение
Расчет механических характеристик асинхронного двигателя будем вести по уточненной формуле Клосса:
где Мк — критический момент; Sk — критическое скольжение; .
Коэффициент приведения сопротивлений:
.
Приведенные значения сопротивлений ротора:
Индуктивное сопротивление короткого замыкания:
Ом.
Критический момент двигателя при номинальном значении питающего напряжения:
, где — скорость идеального холостого хода.
Критическое скольжение на естественной характеристике:
Уравнение естественной механической характеристики:
С помощью данного уравнения рассчитана естественная механическая характеристика
асинхронного двигателя (рис. 9.23, кривая 1). Для построения реостатной механической
характеристики при R2доб= 0.3 R2Н
определим суммарное приведенное сопротивление роторной цепи:
, где Ом — величина дополнительного сопротивления, вводимого в цепь ротора.
Критическое скольжение на реостатной характеристике:
.
Уравнение реостатной характеристики:
.
Соответствующая этому уравнению реостатная механическая характеристика иимеет вид (рис. 9.23, кривая 2).
Для построения механической характеристики при U1 = 0.7 U1Н = 0.7 × 220 = 154 В определим критический момент:
.
Уравнение искусственной механической характеристики при U1= 154 В имеет вид:
.
Соответствующая механическая характеристика имеет вид (рис. 9.23, кривая 3).
Пример 17
Для двигателя, рассмотренного в примере 16, рассчитать сопротивления пускового реостата при нормальном режиме пуска в три ступени и при МС = МН, пользуясь аналитическим методом.
Решение
Так как режим пуска нормальный, то переключающий момент (М2) должен превышать статический на (10 — 20)%.
Принимаем М2*= 1.2. Отношение максимального момента при пуске (М1) к моменту переключения М2 находим по формуле /2/:
.
Осуществляем проверку на максимальный (пиковый) момент, который должен быть меньше критического:
Сопротивление ступеней пускового реостата при включении их в одинарную звезду:
Пример 18
Для двигателя, рассмотренного в примере 16, рассчитать сопротивления пускового реостата при нормальном режиме пуска в три ступени и при МС = МН, пользуясь приближенным графическим методом.
Решение
При расчете пусковых сопротивлений приближенным графическим методом исходят из прямолинейности механической характеристики, и расчет ведется, как для двигателя постоянного тока с параллельным возбуждением.
На рис. 9.24 построены пусковые характеристики двигателя для указанных условий пуска.
Максимальный момент при пуске:
Переключающий момент:
По графику рис. 9.24 определяем сопротивления ступеней пускового реостата:
Сравнивая результаты расчетов сопротивлений в примерах 17 и 18, видим, что расхождение составляет не более 5 %. Поэтому при практических расчетах можно пользоваться любым из рассмотренных методов.
Пример 19
Для асинхронного двигателя с короткозамкнутым ротором рассчитать и построить естественную и искусственные механические характеристики для двух значений частот тока статора f1 = 35 Гц и f2= 20 Гц, при регулировании напряжения на статоре по пропорциональному закону: U/f = const.
Данные
двигателя: PН= 22 кВт; U1Н= 380/220 В; nН= 727 об/мин; R1= 0.18 Ом;
X1 = 0.624 Ом; R`2= 0.153 Ом; X`2= 0.485 Ом.
Решение
Расчет механических характеристик будем вести согласно методике, приведенной в /2, 11/. При пропорциональном законе частотного регулирования U/f = const электромагнитный момент двигателя определяется по формуле:
где m — число фаз статора; U1Н— фазное номинальное напряжение статора при частоте 50 Гц; f* = f/fН — относительная частота; Сf — коэффициент зависящий от частоты f*.
Асинхронный двигатель с ротором— обзор
3.1.3.1 Двигатели переменного тока
Двигатели переменного тока бывают трех основных типов: асинхронные, синхронные и последовательные, и определяются следующим образом:
Асинхронные двигатели. Асинхронный двигатель — это двигатель переменного тока, в котором первичная обмотка на одном элементе (обычно статоре) подключена к источнику питания, а многофазная вторичная обмотка или вторичная обмотка с короткозамкнутым ротором — на другом элементе (обычно роторе). несет индуцированный ток.Есть два типа:
Асинхронный двигатель с короткозамкнутым ротором. Асинхронный двигатель с короткозамкнутым ротором — это двигатель, в котором вторичная цепь состоит из обмотки с короткозамкнутым ротором, подходящей для размещения в пазах вторичного сердечника.
Асинхронный двигатель с фазным ротором. Асинхронный двигатель с фазным ротором — это асинхронный двигатель, вторичная цепь которого состоит из многофазной обмотки или катушек, выводы которых либо закорочены, либо замкнуты через соответствующие цепи.
Синхронный двигатель. Синхронный двигатель — это синхронная машина, преобразующая электрическую энергию в механическую.
Двигатель с последовательной обмоткой. Двигатель с последовательной обмоткой — это двигатель, в котором цепь возбуждения и цепь якоря соединены последовательно.
Многофазные двигатели. Многофазные двигатели переменного тока бывают с короткозамкнутым ротором, с фазным ротором или синхронными.
Дизайнерские письма. Многофазные асинхронные двигатели с короткозамкнутым ротором и интегральной мощностью могут быть одного из следующих:
Конструкция A.Конструкция A Двигатель — это двигатель с короткозамкнутым ротором, предназначенный для выдерживания пуска при полном напряжении и развития крутящего момента заторможенного ротора, как показано в MG 1-12.37, крутящего момента, как показано в MG 1-12.39, крутящего момента пробоя, как показано на MG 1-12.38 с током заторможенного ротора, превышающим значения, указанные в MG 1-12.34 для 60 Гц и MG 1-12.25 для 50 Гц, и имеющий скольжение при номинальной нагрузке менее 5 % . Двигатели с 10 или более полюсами могут иметь скольжение немного больше 5 % .
Конструкция Б .Двигатель конструкции B — это двигатель с короткозамкнутым ротором, предназначенный для того, чтобы выдерживать пуск при полном напряжении и развивать крутящий момент с заторможенным ротором, пробой и тяговый момент, достаточный для общего применения, как указано в MG 1-12.37, MG 1-12.38 и MG 1. -12.39, потребляющий ток заторможенного ротора, не превышающий значений, указанных в MG 1-12.34 для 60 Гц и MG 1-12.35 для 50 Гц, и имеющий скольжение при номинальной нагрузке менее 5 % . Двигатели с 10 и более полюсами могут иметь скольжение немного больше 5 % .
Конструкция С .Двигатель конструкции C представляет собой двигатель с короткозамкнутым ротором, предназначенный для выдерживания пуска при полном напряжении и развития крутящего момента с заторможенным ротором для специальных применений с высоким крутящим моментом до значений, указанных в MG 1-12.37, крутящий момент, как показано в MG 1- 12.39, момент пробоя до значений, указанных в MG 1-12.38, с током заторможенного ротора, не превышающим значений, указанных в MG 1-12.34 для 60 Гц и MG 1-12.35 для 50 Гц, и с проскальзыванием при номинальной нагрузке. менее 5 % .
Конструкция D . Двигатель конструкции D представляет собой двигатель с короткозамкнутым ротором, который выдерживает пуск при полном напряжении и развивает высокий крутящий момент с заторможенным ротором, как показано в MG 1-1.37 с током заторможенного ротора не более, чем указано в MG 1-12.34 для 60 Гц и MG 1-12.35 для 50 Гц, и имеющим скольжение при номинальной нагрузке 5 % или более.
Однофазные двигатели. Однофазные двигатели переменного тока обычно представляют собой асинхронные или последовательные двигатели, хотя однофазные синхронные двигатели доступны в меньших номиналах.
Дизайнерские письма. Однофазные двигатели с интегральной мощностью могут быть одной из следующих:
Конструкция L.Двигатель A конструкции L представляет собой однофазный двигатель со встроенной мощностью в лошадиных силах, предназначенный для выдерживания пуска при полном напряжении и развития момента пробоя, как показано в MG 1-10.33, с током заторможенного ротора, не превышающим значений, указанных в MG 1- 12.33.
Конструкция M. Двигатель конструкции M представляет собой однофазный двигатель со встроенной мощностью в лошадиных силах, разработанный, чтобы выдерживать пуск при полном напряжении и развивать момент пробоя, как показано в MG 1-10.33, с током заторможенного ротора, не превышающим значения указаны в MG 1-12.33.
Однофазные двигатели с короткозамкнутым ротором. Однофазные асинхронные двигатели с короткозамкнутым ротором классифицируются и определяются следующим образом:
Двухфазный двигатель. Двигатель с расщепленной фазой — это однофазный асинхронный двигатель, оснащенный вспомогательной обмоткой, смещенной в магнитном положении от основной обмотки и подключенной параллельно с ней. Примечание: Если не указано иное, предполагается, что вспомогательная цепь размыкается, когда двигатель достигает заданной скорости.Термин «двигатель с расщепленной фазой», используемый без уточнения, описывает двигатель, который будет использоваться без сопротивления, отличного от импеданса, обеспечиваемого самими обмотками двигателя; другие типы определены отдельно.
Двигатель с сопротивлением пуска. Двигатель с резистивным пуском — это двигатель с расщепленной фазой, сопротивление которого последовательно подключено к вспомогательной обмотке. Вспомогательная цепь размыкается, когда двигатель достигает заданной скорости.
Конденсаторный двигатель. Конденсаторный двигатель — это однофазный асинхронный двигатель с основной обмоткой, предназначенной для прямого подключения к источнику питания, и вспомогательной обмоткой, соединенной последовательно с конденсатором. Существует три типа конденсаторных двигателей, а именно:
Двигатель с конденсаторным пуском. Двигатель с конденсаторным запуском — это двигатель с конденсатором, в цепи которого конденсаторная фаза присутствует только в течение периода пуска.
Двигатель с постоянным разделением конденсаторов. Конденсаторный двигатель с постоянным разделением каналов — это конденсаторный двигатель, имеющий одинаковое значение емкости как для пусковых, так и для рабочих условий.
Конденсаторный двигатель с двумя значениями. Двухзначный конденсаторный двигатель — это конденсаторный двигатель, использующий разные значения эффективной емкости для условий запуска и работы.
Двигатель с расщепленными полюсами. Двигатель с расщепленными полюсами — это однофазный асинхронный двигатель, снабженный вспомогательной короткозамкнутой обмоткой или обмотками, смещенными в магнитном положении от основной обмотки. Это приводит к самозапуску двигателя.
Однофазные двигатели с фазным ротором. Двигатели с одинарным ротором определяются и классифицируются следующим образом:
Отталкивающий двигатель. Отталкивающий двигатель — это однофазный двигатель, имеющий обмотку статора, предназначенную для подключения к коммутатору. Щетки на коммутаторе закорочены и размещены так, чтобы совмещать магнитную ось обмотки статора. Этот тип двигателя имеет вариаторную характеристику.
Асинхронный двигатель с отталкиванием. Асинхронный двигатель с отталкивающим пуском — это однофазный двигатель, имеющий те же обмотки, что и отталкивающий двигатель, но при заданной скорости обмотка ротора замыкается накоротко или иным образом соединяется, чтобы получить эквивалент обмотки с короткозамкнутым ротором.Этот тип двигателя запускается как отталкивающий двигатель, но работает как асинхронный двигатель с характеристиками постоянной скорости.
Отталкивающий асинхронный двигатель. Отталкивающий асинхронный двигатель — это разновидность отталкивающего двигателя, который имеет короткозамкнутую обмотку в роторе в дополнение к обмотке отталкивающего двигателя. Двигатель этого типа может иметь характеристику постоянной скорости (см. MG1-1.30) или переменной скорости (см. MG 1-1.31).
Универсальные моторы. Универсальный двигатель — это двигатель с последовательной обмоткой, предназначенный для работы примерно с одинаковой скоростью и мощностью на постоянном или однофазном переменном токе с частотой не более 60 циклов / с и примерно одинаковым среднеквадратичным напряжением.Есть два типа:
Двигатели с серийной обмоткой. Двигатель с последовательной обмоткой — это коллекторный двигатель, в котором цепь возбуждения и цепь якоря соединены последовательно.
Двигатель с компенсацией серии. Компенсированный последовательный двигатель — это последовательный двигатель с компенсирующей обмоткой возбуждения. (Компенсирующая обмотка возбуждения и последовательная обмотка возбуждения могут быть объединены в одну обмотку возбуждения.)
Обзор двигателя переменного тока и технические характеристики двигателя переменного тока
Обзор двигателя переменного тока
Если вам нужна исчерпывающая информация о двигателях переменного тока, вы обратились по адресу.Индивидуальные двигатели переменного тока делятся на две основные категории: синхронные и асинхронные. Наиболее распространенным типом асинхронного двигателя является асинхронный двигатель переменного тока, который производители двигателей изготавливают на заказ с использованием трансформатора переменного тока с вращающейся вторичной обмоткой. В этом типе двигателя первичная обмотка или статор подключается к источнику питания, в то время как закороченный вторичный элемент или ротор несет наведенный вторичный ток. Воздействие токов ротора на поток в воздушном зазоре создает крутящий момент. С другой стороны, асинхронный двигатель находится в отдельном классе двигателей переменного тока из-за различий в конструкции и рабочих характеристиках.Sinotech предлагает обширный каталог двигателей, производимых нашими производителями двигателей переменного тока, который может быть адаптирован к вашим точным требованиям.
Узнайте о новейших двигателях переменного тока в нашем блоге.
Асинхронный VS синхронный двигатель переменного тока
Обзор асинхронных асинхронных асинхронных двигателейАсинхронные двигатели переменного тока
Все асинхронные двигатели являются асинхронными двигателями. Асинхронные двигатели переменного тока, являясь одним из самых простых и надежных электродвигателей, имеют две основные электрические сборки: статор с обмоткой и узел ротора.Двигатель получил свое название от токов, протекающих в ротор, которые индуцируют переменные токи, протекающие в первичном элементе или статоре. Комбинированные магнитные эффекты токов статора и ротора создают силу, необходимую для вращения.
Двигатели переменного тока, в том числе асинхронные двигатели переменного тока, имеют роторы с пластинчатым цилиндрическим железным сердечником с прорезями для ввода проводов. Наиболее распространенный тип ротора, производимый производителями двигателей переменного тока, иногда называют «беличьей клеткой», который имеет литые алюминиевые проводники и замыкающие концевые кольца.Беличья клетка вращается, когда движущееся магнитное поле создает ток в укороченных проводниках.
В двигателе переменного тока скорость вращения магнитного поля называется синхронной скоростью (n s ). Эта скорость определяется количеством полюсов статора и частотой источника питания. Формула для расчета синхронной скорости двигателя переменного тока: n с = 120f / p.
- n s: синхронная скорость в об / мин
- f: частота сетевого напряжения в Гц
- п: количество полюсов
Синхронная скорость — это абсолютный верхний предел скорости двигателя переменного тока.Если ротор вращается с той же скоростью, что и вращающееся магнитное поле, проводники ротора не перерезают силовые линии и не создают крутящего момента.
При работе двигателя переменного тока ротор всегда вращается медленнее, чем магнитное поле. Скорость ротора достаточно мала, чтобы вызвать надлежащую величину протекания тока ротора, чтобы результирующий крутящий момент был достаточным для управления нагрузкой и преодоления потерь на ветер и трение.
Разница в скорости между ротором двигателя переменного тока и магнитным полем называется «скольжением».«Скольжение — это процент от синхронной скорости. Формула для расчета скольжения: s = 100 (n s — n a ) / n s .
- s = скольжение
- n s = синхронная скорость
- n a = фактическая скорость
Синхронные двигатели Обзор
Синхронные двигателиимеют особую конструкцию ротора, которая позволяет им вращаться с той же скоростью, что и поле статора. Другими словами, они работают абсолютно синхронно с частотой сети.К основным типам синхронных двигателей относятся двигатели без возбуждения и с возбуждением от постоянного тока. Как и в случае с асинхронными двигателями переменного тока, скорость синхронных двигателей определяется количеством пар полюсов. Он рассчитывается по соотношению частот линии.
Изготовители двигателей на заказ проектируют синхронные двигатели различных размеров, от субфракционных двигателей с самовозбуждением до двигателей переменного тока большой мощности с возбуждением от постоянного тока для промышленных приводов. В диапазоне дробных лошадиных сил синхронные двигатели служат для обеспечения точной постоянной скорости.
В применении к промышленным нагрузкам синхронные двигатели большой мощности выполняют две важные функции:
- Обеспечивают высокоэффективные средства преобразования энергии переменного тока в механическую энергию
- Работают с опережающим или единичным коэффициентом мощности, обеспечивая коррекцию коэффициента мощности
Электродвигатели синхронные без возбуждения
Производители двигателей переменного тока создают невозбужденные электродвигатели, использующие конструкции реактивного сопротивления и гистерезиса.Они используют схему самозапуска и не требуют внешнего источника возбуждения.
Электродвигатели синхронные с постоянным током возбуждения
Электродвигателис возбуждением постоянным током доступны мощностью более 1 л.с. Для работы им требуется постоянный ток, подаваемый через контактные кольца для возбуждения. Двигатель получает постоянный ток от отдельного источника или генератора постоянного тока, подключенного к валу двигателя переменного тока.
Однофазные и многофазные синхронные двигатели должны приводиться в действие или их ротор должен быть подключен по схеме самозапуска для запуска.Поскольку поле электродвигателя вращается с синхронной скоростью, электродвигатель должен быть ускорен, прежде чем он сможет синхронизироваться. Ускорение с нулевой скорости требует проскальзывания до достижения синхронизма. Следовательно, для начала важно использовать отдельные средства.
В самозапускающихся электрических двигателях переменного тока, изготовленных по индивидуальному заказу, в размерах л.с. используются методы пуска, общие для асинхронных электродвигателей, такие как разделенная фаза, конденсаторный пуск, отталкивающий пуск и затененный полюс. Двигатели автоматически переключаются на синхронную работу из-за электрических характеристик.
В двигателяхс возбуждением постоянным током для пуска используется беличья клетка, называемая амортизатором или демпферной обмоткой. Между прочим, присущий двигателю низкий пусковой крутящий момент и потребность в источнике питания постоянного тока требуют системы пуска, которая:
- Обеспечивает полную защиту электродвигателя при запуске
- Применяет возбуждение постоянного поля в нужное время
- Снимает возбуждение поля при извлечении ротора (максимальный крутящий момент)
- Защищает обмотку электродвигателя с короткозамкнутым ротором от теплового повреждения при сбоях в работе
Взгляд на крутящий момент в электродвигателях с постоянным возбуждением
Момент подъема
Крутящий момент электродвигателя определяется как минимальный крутящий момент, создаваемый от состояния покоя до точки втягивания.Этот крутящий момент должен превышать крутящий момент нагрузки, достаточный для поддержания удовлетворительной скорости ускорения при нормальном напряжении.
Момент сопротивления
Реактивный крутящий момент двигателя является результатом выступа полюсных наконечников ротора, что является предпочтительным направлением намагничивания. Он пульсирует на скоростях ниже синхронной.
Момент сопротивления влияет на моменты втягивания и извлечения двигателя, поскольку невозбужденный явнополюсный ротор стремится выровняться с магнитным полем статора электродвигателя, чтобы поддерживать минимальное магнитное сопротивление.Реактивного сопротивления электродвигателя может быть достаточно, чтобы синхронизировать слегка нагруженную малоинерционную систему и развить крутящий момент отрыва около 30 процентов.
Синхронный момент
Синхронный крутящий момент электродвигателя — это крутящий момент, создаваемый после приложения возбуждения. Он представляет собой общий крутящий момент в установившемся режиме, доступный для привода нагрузки. Крутящий момент достигает максимума примерно при 70 отставании ротора от магнитного поля вращающегося статора. Однако максимальное значение — это момент отрыва.
Момент отрыва
Момент отрыва — это максимальный устойчивый крутящий момент, который электродвигатель развивает при синхронной скорости в течение одной минуты с номинальной частотой и нормальным возбуждением. Нормальный крутящий момент отрыва обычно составляет 150 процентов крутящего момента при полной нагрузке для электродвигателей с единичным коэффициентом мощности. Для электродвигателей с опережающим коэффициентом мощности 0,8 он составляет от 175 до 200 процентов.
Момент затяжки
Вращающий момент синхронного двигателя — это крутящий момент, развиваемый при переводе подключенной инерционной нагрузки в синхронизм при приложении возбуждения.Он разработан при переходе от скорости скольжения к синхронной скорости, когда электродвигатели переходят от индукционной к синхронной работе. Это обычно самый критический период при запуске синхронного двигателя. При синхронной скорости крутящий момент, развиваемый амортизатором и обмотками возбуждения, становится нулевым. В результате только реактивное сопротивление и синхронизирующий момент, обеспечиваемые возбуждением обмоток возбуждения, эффективны в точке втягивания.
Дополнительные типы конструкции электродвигателей переменного тока по индивидуальному заказу
Многофазные двигатели переменного тока
Многофазные двигатели переменного тока с короткозамкнутым ротором, такие как трехфазные двигатели, представляют собой машины с постоянной скоростью.Они обладают некоторой степенью гибкости в рабочих характеристиках при изменении конструкции паза ротора. Изменения в двигателях переменного тока вызывают изменения тока, крутящего момента и скорости при полной нагрузке. Стандартизация и инновации позволили получить четыре основных типа двигателей переменного тока:
Конструкции A и B Характеристики
- Электродвигатель переменного тока общего назначения с нормальным пусковым моментом и током, а также с малым скольжением
- Фракционные многофазные двигатели переменного тока обычно имеют конструкцию B
- Поскольку конструкция B имеет падающие характеристики, многофазный двигатель переменного тока с таким же пробоем или максимальным крутящим моментом, что и однофазный двигатель переменного тока, не может достичь той же точки скорости-момента для скорости полной нагрузки, что и однофазный нестандартный двигатель переменного тока. моторные конструкции
- Пробойный момент должен быть выше для сопоставимых скоростей полной нагрузки (минимум 140 процентов пробивного момента однофазных двигателей переменного тока общего назначения)
Исполнение C Характеристики
- Высокий пусковой момент при нормальном пусковом токе и малом скольжении
- Используется там, где отрывные нагрузки высоки при пуске, но обычно работают при номинальной полной нагрузке
- Не подвержен высоким требованиям к перегрузке после достижения рабочей скорости
Конструкция D Характеристики
- Высокое скольжение, позволяющее снизить скорость при колебаниях нагрузки
- Низкий пусковой ток
- Низкая частота вращения при полной нагрузке
- Эту конструкцию можно разделить на несколько подгрупп, которые различаются скольжением или формой кривой скорость-крутящий момент.
Конструкция F Характеристики
- Низкий пусковой момент
- Низкий пусковой ток
- Низкое скольжение
- Изготовители двигателей на заказ создают двигатели переменного тока для получения низкого тока заторможенного ротора
- Заторможенный ротор и низкий момент пробоя
- Двигатели обычно используются при низком пусковом моменте и не возникают высокие перегрузки после достижения рабочей скорости
Двигатели переменного тока с фазным ротором
Двигатели переменного токас короткозамкнутым ротором относительно негибки в отношении характеристик скорости и крутящего момента.Однако специальный двигатель переменного тока с фазным ротором имеет регулируемые скорость и крутящий момент. Применение двигателей переменного тока с фазным ротором заметно отличается от двигателей переменного тока с короткозамкнутым ротором из-за доступности цепи ротора. Чтобы получить характеристики двигателя переменного тока, нужно ввести различные значения сопротивления в цепь ротора.
Вторичное сопротивление в цепи ротора обычно запускает двигатели переменного тока с фазным ротором. Затем сопротивление двигателя переменного тока последовательно снижается, чтобы двигатель разгонялся.В результате двигатели переменного тока могут развивать значительный крутящий момент при ограничении тока заторможенного ротора. Изготовители двигателей переменного тока могут спроектировать это вторичное сопротивление двигателя для непрерывной работы, чтобы рассеивать тепло, выделяемое при непрерывной работе на пониженных скоростях, частом ускорении или ускорении с большими инерционными нагрузками.
Внешнее сопротивление придает двигателям переменного тока характеристику, которая приводит к значительному падению оборотов в минуту при небольшом изменении нагрузки. Обеспечивается пониженная скорость двигателя переменного тока примерно до 50 процентов от номинальной скорости, но эффективность остается низкой.
Многоскоростные электродвигатели переменного тока
Изготовители двигателей на заказ проектируют двигатели переменного тока с последовательным переключением полюсов для работы на одной скорости. Путем физического повторного подключения выводов можно достичь передаточного отношения 2: 1. Типичные скорости для двигателей переменного тока 60 Гц:
- 3600/1800 об / мин (2/4 полюса)
- 1800/900 об / мин (4/8 полюса)
- 1200/600 об / мин (6/12 полюсов)
Двухобмоточные двигатели переменного тока имеют две отдельные обмотки, которые производители могут наматывать на любое количество полюсов, чтобы облегчить получение других соотношений скоростей.Однако соотношение больше 1: 4 нецелесообразно из-за размера и веса двигателя переменного тока. Однофазные двигатели переменного тока обычно имеют конструкцию с регулируемым крутящим моментом. Однако также доступны двигатели переменного тока с постоянным крутящим моментом и постоянной мощностью.
Выходная мощность двигателей переменного тока может быть пропорциональна каждой скорости. Такие нестандартные конструкции электродвигателей переменного тока имеют выходную мощность в лошадиных силах в соответствии с одной из следующих нагрузочных характеристик:
- Переменный крутящий момент : Эти двигатели переменного тока имеют характеристики скорость-крутящий момент, которые изменяются пропорционально квадрату скорости.Например, электродвигатель со скоростью 1800/900 об / мин, который развивает 10 л.с. при 1800 об / мин, выдает 2,5 л.с. при 900 об / мин. Поскольку двигатели переменного тока сталкиваются с нагрузками, такими как центробежные насосы, вентиляторы и воздуходувки, их требования к крутящему моменту зависят от квадрата или куба скорости. Эта моторная характеристика в целом адекватна.
- Постоянный крутящий момент : Эти двигатели переменного тока могут развивать одинаковый крутящий момент на каждой скорости. В результате выходная мощность напрямую зависит от скорости. Например, двигатель переменного тока мощностью 10 л.с. при 1800 об / мин выдает 5 л.с. при 900 об / мин.Вы найдете эти двигатели в приложениях с требованиями к постоянному крутящему моменту, таких как смесители, конвейеры и компрессоры.
- Постоянная лошадиных сил : Эти двигатели переменного тока развивают одинаковую мощность на каждой скорости. Крутящий момент обратно пропорционален скорости. Такие двигатели переменного тока применяются в станках, включая дрели, фрезерные станки и токарные станки.
Однофазные двигатели переменного тока
Однофазные асинхронные электродвигатели переменного тока обычно имеют дробную мощность.Однако однофазная интегральная мощность доступна в более низком диапазоне лошадиных сил. Наиболее распространенные однофазные двигатели переменного тока с дробной мощностью:
- Двухфазный
- Конденсатор-умный
- Постоянный разделенный конденсатор
- Шестигранник
Эта индивидуальная конструкция двигателя переменного тока доступна в многоскоростных типах, но есть практические ограничения на количество получаемых скоростей. Доступны модели с двух-, трех- и четырехскоростными двигателями. Выбор скорости может сопровождаться последовательными полюсами или двумя обмотками.
Универсальные моторы
Универсальные моторы
Универсальные двигатели работают с почти эквивалентной производительностью на постоянном или переменном токе до 60 Гц. Двигатели переменного тока отличаются от двигателей постоянного тока соотношением обмоток и более тонкими слоями железа. Двигатели постоянного тока могут работать на переменном токе, но с низким КПД. Универсальные двигатели могут работать от постоянного тока с практически эквивалентными характеристиками двигателя переменного тока. Однако их коммутация и срок службы щеток ниже, чем у аналогичного двигателя постоянного тока.Важной характеристикой универсальных двигателей переменного тока является то, что они имеют самое высокое соотношение мощности на фунт среди всех двигателей переменного тока, поскольку они работают на скоростях, во много раз превышающих скорость любого электродвигателя с частотой 60 Гц.
Универсальные двигатели при работе без нагрузки имеют тенденцию к разбегу. Скорость ограничена только парусностью, трением и коммутацией. Поэтому большие универсальные двигатели почти всегда подключаются напрямую к нагрузке для ограничения скорости. На портативных инструментах, таких как электрические пилы, нагрузки на шестерни, подшипники и охлаждающий вентилятор достаточно, чтобы поддерживать скорость холостого хода на безопасном уровне.
В универсальном двигателе регулирование скорости является простым, поскольку скорость электродвигателя чувствительна к изменениям напряжения и магнитного потока. Реостат или регулируемый автотрансформатор позволяют легко изменять скорость двигателя переменного тока от максимальной до нуля.
Электродвигатели с синхронизацией по времени
Электродвигатели ГРМ мощностью менее 1/10 л.с. используются в качестве первичных двигателей для синхронизирующих устройств. Поскольку двигатель используется в качестве таймера, он должен работать с постоянной скоростью.
Электродвигателипеременного и постоянного тока могут использоваться в качестве синхронизирующих двигателей.Электродвигатели с синхронизатором постоянного тока служат для портативных приложений или когда требуются высокое ускорение и низкое изменение скорости. Хотя требуется механический или электрический регулятор скорости в той или иной форме, такие электродвигатели обладают следующими преимуществами:
- КПД от 50 до 70 процентов
- Пусковой крутящий момент в 10 раз превышает рабочий крутящий момент
- Относительно простой контроль скорости
Серводвигатели переменного тока
Серводвигателииспользуются в сервомеханизмах и компьютерах переменного тока, которые требуют быстрых и точных характеристик отклика.Для достижения этих характеристик серводвигатели имеют роторы малого диаметра с высоким сопротивлением. Меньший диаметр обеспечивает низкую инерцию для быстрого пуска, останова и реверсирования. Высокое сопротивление обеспечивает почти линейную зависимость скорости от крутящего момента для точного управления.
Изготовители двигателей на заказ заводят серводвигатели с двумя фазами, физически расположенными под прямым углом или квадратурными в пространстве. Двигатели оснащены фиксированной или опорной обмоткой, которая возбуждается от постоянного источника напряжения. Управляющая обмотка возбуждается регулируемым или переменным управляющим напряжением, обычно от сервоусилителя.Инженеры проектируют обмотки серводвигателя с одинаковым соотношением напряжения и числа витков, поэтому потребляемая мощность при максимальном фиксированном возбуждении и максимальном сигнале фазы управления сбалансированы.
В идеальном серводвигателе крутящий момент на любой скорости прямо пропорционален напряжению обмотки управления двигателя. Однако эта взаимосвязь существует только при нулевой скорости из-за присущей асинхронному серводвигателю неспособности реагировать на изменения входного напряжения в условиях небольшой нагрузки.
Собственное демпфирование серводвигателей уменьшается по мере увеличения номинальных значений, и двигатели имеют разумный КПД за счет линейности скорости-момента.Многие серводвигатели большего размера имеют встроенные вспомогательные нагнетатели для поддержания температуры в безопасных рабочих диапазонах. Серводвигатели переменного тока доступны с номинальной мощностью от менее 1 до 750 Вт и размерами от 0,5 до 0,7 дюйма. Большинство серводвигателей переменного тока имеют модульные или встроенные редукторы.
Заинтересованы в линейных двигателях переменного тока? Об их истории, характеристиках и применении читайте здесь.
Sinotech разрабатывает индивидуальные двигатели переменного тока в США и производит их в нескольких местах по всему Тихоокеанскому региону, чтобы снизить ваши затраты и риски.Свяжитесь с нами сегодня и дайте нам знать, как наши услуги по изготовлению электродвигателей переменного тока могут помочь вам запустить и запустить ваше приложение уже сегодня.
Принцип работы асинхронного двигателя— StudiousGuy
Асинхронные двигатели — одно из величайших изобретений в истории человечества. На ее долю приходится около 45% от общего потребления электроэнергии во всем мире, это повсеместная технология в современном мировом оборудовании. Фактически, всемирно известная корпорация по производству электромобилей Tesla назвала свою организацию в честь изобретателя асинхронного двигателя Николы Тесла.Асинхронный двигатель — это электродвигатель с приводом от переменного тока (AC), который использует электромагнитную индукцию для преобразования электрической энергии в механическую. Он также известен как асинхронный двигатель, поскольку частота вращения двигателя обычно меньше и не синхронизируется с частотой входного переменного тока. Асинхронные двигатели имеют несколько преимуществ по сравнению с аналогичными двигателями постоянного тока, такие как более низкая стоимость конструкции и обслуживания, простота эксплуатации, более высокая скорость, долговечность и т. Д., Что делает их более удобными для использования.Чтобы понять принцип работы асинхронного двигателя, давайте сначала разберемся, в каких частях он является отличной машиной.
Указатель статей (Нажмите, чтобы перейти)
Компоненты асинхронного двигателя
Асинхронный двигатель может быть разных форм и размеров, но чаще всего это цилиндрическое устройство с торчащим из него осевым валом. Вращательное действие вала осуществляется за счет особого расположения следующих компонентов.
Статор
Статор асинхронного двигателя представляет собой полый цилиндрический сердечник, состоящий из многослойных и многослойных тонких металлических листов.Это неподвижная часть с прорезями для намотки катушки электромагнитной цепи двигателя. Многослойная структура статора используется для предотвращения потерь на вихревые токи и гистерезиса, которые в противном случае возникли бы с твердым сердечником. Катушка статора, также известная как обмотка статора, сделана из медных проводов, изолированных эмалью, лаком или смолами, чтобы избежать короткого замыкания.
Ротор
Ротор — это вращающаяся часть асинхронного двигателя. Это цилиндрический блок, установленный на валу, который несет механическую нагрузку.При производстве асинхронных двигателей используются два типа роторов.
Ротор с беличьей клеткой
Ротор с короткозамкнутым ротором — один из наиболее широко используемых роторов в производстве асинхронных двигателей из-за его исключительных характеристик, таких как надежность, надежность и низкая стоимость производства. Он получил свое название от своей цилиндрической конструкции, напоминающей клетку, которая состоит из продольных токопроводящих стержней, изготовленных из алюминия или меди, закороченных накоротко с кольцами, выполненными из того же материала на обоих концах.Стержни ротора слегка перекошены, чтобы они не блокировались зазорами между катушками статора, обеспечивая плавное и бесшумное вращение. Кроме того, количество стержней не должно равняться целому кратному числу пазов статора, так как это может вызвать магнитную блокировку обоих компонентов.
Ротор с обмоткой
Ротор с обмоткой, также известный как ротор с контактным кольцом, представляет собой цилиндрический блок, сделанный из тонких многослойных стальных листов, уложенных друг на друга, и на его периферии есть прорези для удержания вращающихся обмоток.Концы вращающихся обмоток соединены с тремя контактными кольцами, размещенными вокруг вала. Контактные кольца соединены с блоками переменного сопротивления мощности через щетки, что позволяет оператору изменять скорость двигателя, изменяя сопротивление.
Вал
Вал представляет собой длинный стержень из углеродистой стали, расположенный вдоль цилиндрической оси асинхронного двигателя. Это элемент, который обеспечивает преобразованную механическую энергию для конечного использования. Головка вала связана с различными механическими нагрузками, такими как шкивы, шестерни и т. Д., в то время как задняя часть соединена с вентилятором внутри двигателя.
Подшипники
Вал ротора удерживается подшипниками на обоих концах корпуса двигателя. Подшипники минимизируют трение вала, соединенного с корпусом, повышая эффективность двигателя. Корпус асинхронного двигателя содержит все компоненты двигателя, обеспечивает электрические соединения и обеспечивает вентиляцию деталей двигателя для уменьшения тепловыделения. Конструкция корпуса часто включает ребра для отвода тепла.
Вентилятор
Вентилятор в асинхронном двигателе действует как вытяжка и охлаждает асинхронный двигатель, рассеивая тепло. Он соединен с валом, который передает вращательное движение ротора на вентилятор.
Кожух
Корпус асинхронного двигателя содержит все компоненты двигателя, обеспечивает электрические соединения и обеспечивает вентиляцию деталей двигателя для уменьшения тепловыделения. Конструкция корпуса часто включает ребра для отвода тепла.
Принцип работы асинхронного двигателя
Асинхронный двигатель работает по принципу электромагнитной индукции. Это явление, при котором ЭДС индуцируется поперек проводника, когда он находится внутри переменного магнитного поля. Эта наведенная ЭДС в катушке задается законом электромагнитной индукции Фарадея, который гласит, что электродвижущая сила вокруг замкнутого пути равна отрицательной скорости изменения во времени магнитного потока, заключенного на этом пути. Математически это выражение можно записать как
ε = — \ frac {dΦ} {dt}Где ε — наведенная ЭДС, Φ — магнитный поток, а t обозначает время.
Взаимодействие между двумя магнитными полями заставляет ротор вращаться. Чтобы понять концепцию более подробно, давайте посмотрим на работу асинхронного двигателя.
Работа асинхронного двигателя
Когда переменный ток течет через обмотки статора, он создает магнитное поле вокруг катушек обмоток. Катушки внутри статора расположены таким образом (пространственно разнесены на 120 °), что создаваемое ими магнитное поле начинает вращаться вследствие периодически меняющегося направления входного переменного тока.Вращающееся магнитное поле индуцирует ток, который течет через замкнутые обмотки ротора. Затем течение тока создает обратную ЭДС, которая противодействует изменению магнитного поля, создаваемого обмотками статора. Обратная ЭДС обмоток ротора отстает на 90 градусов (без нагрузки) от ЭДС обмоток статора. Эта разница в силе создает крутящий момент и заставляет ротор вращаться вокруг оси вала. Задержка также заставляет обмотки ротора вращаться немного медленнее, чем вращающееся поле.Разница между скоростью известна как «проскальзывание» в технических терминах и может варьироваться в зависимости от нескольких факторов, таких как нагрузка на двигатель, сопротивление цепи ротора и сила магнитного поля, создаваемого двигателем. статор. Асинхронный двигатель работает аналогично трансформатору, причем первичная и вторичная обмотки являются обмотками статора и ротора соответственно. Асинхронный двигатель также известен как вращающийся трансформатор из-за вращательного движения обмоток ротора.Работа асинхронных двигателей может различаться в зависимости от их типа.
Типы асинхронных двигателей
Асинхронные двигателив основном подразделяются на две категории в зависимости от источника питания, с которым они работают, то есть трехфазные асинхронные двигатели и однофазные асинхронные двигатели.
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель — один из наиболее часто используемых асинхронных двигателей в промышленных и коммерческих целях.Как следует из названия, трехфазные асинхронные двигатели — это те, которые работают от трехфазного источника переменного тока. Чтобы понять принцип работы трехфазного асинхронного двигателя, необходимо немного узнать о трехфазном источнике питания переменного тока. Направление тока в источнике питания переменного тока периодически меняется, генерируя синусоидальную форму волны, причем каждый цикл показывает величину тока, идущую от нуля до максимума в одном направлении, обратно до нуля, а затем до максимума в противоположном направлении.Трехфазный источник питания переменного тока содержит три различных синусоидальных сигнала переменного тока, так что, когда один из циклов проходит через ноль, два других могут компенсировать уменьшенную величину тока в цепи. Большинство наших бытовых электроприборов могут эффективно работать с частотой 50-60 Гц (циклов в секунду) одной синусоидальной формы волны переменного тока; однако в промышленных целях применяется трехфазный источник переменного тока для удовлетворения требований высокой мощности.
В трехфазном асинхронном двигателе статор состоит из трех наборов обмоток, на которые подается входной трехфазный переменный ток.Обмотки статора расположены по Y-образной схеме, образуя разность фаз в 120 градусов электрического угла. Эта конструкция обеспечивает вращающееся магнитное поле, и согласно закону Ленца ротор начинает вращаться в своем направлении, чтобы нейтрализовать эффект электромагнитной индукции. Тем не менее, из-за разницы между индуцированным магнитным потоком ротора и магнитным потоком статора, ротор никогда не достигает скорости вращающегося магнитного поля. Гипотетически, если ротор сможет достичь скорости, аналогичной скорости вращающегося магнитного поля, за счет приложения некоторой внешней силы, не будет никакого запаздывания между потоками, и электромагнитная индукция немедленно прекратится.В основном это два
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Как следует из названия, трехфазный асинхронный двигатель с короткозамкнутым ротором содержит ротор с короткозамкнутым ротором (описанный выше) и работает от трехфазного источника переменного тока. Вращающееся магнитное поле индуцирует ток через проводящие стержни, который дополнительно генерирует магнитный поток ротора и заставляет ротор вращаться. Цилиндрическая конструкция клетки имеет определенные преимущества, такие как прочная конструкция и низкие затраты на техническое обслуживание; однако наиболее важной особенностью роторов с короткозамкнутым ротором является простота конструкции для создания различных вариантов.Характеристики скорости-момента трехфазного асинхронного двигателя с короткозамкнутым ротором можно легко изменить, отрегулировав перекос и длину токопроводящих стержней внутри ротора. Это позволяет легко заменять двигатели разных производителей, что упрощает замену двигателей. Тем не менее, отсутствие контроля скорости в асинхронных двигателях с короткозамкнутым ротором является недостатком их уникальной конструкции. Короткозамкнутые кольца на концах ротора не дают места для добавления переменного сопротивления, и поэтому трехфазный асинхронный двигатель с короткозамкнутым ротором работает с постоянной скоростью после достижения установившегося состояния.
Трехфазный асинхронный двигатель с контактным кольцом
Трехфазный асинхронный двигатель с контактным кольцом, также известный как трехфазный асинхронный двигатель с обмоточным ротором, представляет собой асинхронный двигатель с регулируемой скоростью. Ротор этих двигателей состоит из цилиндрического блока, состоящего из многослойных стальных пластин, намотанных катушками из медной проволоки. Обмотки ротора имеют трехфазную конфигурацию, при этом выводы каждой фазы подключены к контактным кольцам. Контактное кольцо — это электромеханическое устройство, которое помогает передавать мощность и электрические сигналы от неподвижного компонента к вращающемуся.Когда источник переменного тока используется для возбуждения обмотки статора, создается магнитный поток. Вращающееся магнитное поле индуцирует ток через проводящие стержни, который создает дополнительный магнитный поток в роторе и заставляет его вращаться. Тем не менее, из-за большего количества витков в обмотках ротора индуцированное напряжение выше, чем индуцированный ток. Когда двигатель включен, внешнее сопротивление, приложенное к обмоткам ротора, заставляет ток ротора ослаблять вращающееся магнитное поле статора.Это означает, что как только двигатель достигает полной скорости, сопротивление можно регулировать для управления скоростью вращения, что дает операторам возможность выбирать пусковой момент и рабочие характеристики. Индуктивное реактивное сопротивление и разность фаз между I и V могут быть уменьшены, что позволяет двигателю обеспечивать высокий пусковой момент. По сравнению со стандартными двигателями с короткозамкнутым ротором сложность и необходимость обслуживания контактных колец и щеток высоки. Тем не менее, в приложениях с высокими инерционными нагрузками, таких как большие вентиляторы, насосы и мельницы, конструкция с фазным ротором позволяет постепенное ускорение нагрузки за счет управления скоростью и крутящим моментом.
Преимущества трехфазного асинхронного двигателя
- Они имеют простую конструкцию и прочную конструкцию, что делает их долговечными и простыми в использовании.
- Стоимость обслуживания трехфазных асинхронных двигателей значительно ниже по сравнению с однофазными асинхронными двигателями.
- Наиболее важной особенностью, которая делает трехфазные асинхронные двигатели широко применяемыми в промышленности, является то, что они самозапускаются и не требуют какого-либо внешнего механизма для запуска вращения ротора.Вращающееся магнитное поле, создаваемое Y-образной структурой обмоток статора, достаточно эффективно для создания пускового момента, чего нет в однофазных асинхронных двигателях.
- Разделение трехфазного входного переменного тока в трехфазном асинхронном двигателе вызывает распределение нагрузки и делает двигатель более эффективным с точки зрения характеристик скорости-момента.
- Ротор трехфазного асинхронного двигателя с короткозамкнутым ротором не имеет физического электрического соединения, что позволяет избежать потерь тока, которые могут возникнуть во время передачи.
- Трехфазный асинхронный двигатель работает во вращающемся магнитном поле с постоянной величиной, то есть крутящий момент постоянный, а не пульсирующий.
- Постоянное магнитное поле также снижает вибрацию двигателя.
Недостатки трехфазного асинхронного двигателя
- Трехфазный асинхронный двигатель потребляет больше тока в условиях небольшой нагрузки из-за низкого коэффициента мощности. В результате происходит большая утечка меди и низкий КПД.
- Для управления скоростью трехфазного асинхронного двигателя требуется больше электрических компонентов, что приводит к сложному электрическому механизму.
- Асинхронный двигатель имеет высокий пусковой ток. Это вызывает снижение напряжения во время запуска.
Приложения
Трехфазные асинхронные двигатели в основном используются в промышленных условиях. Асинхронные двигатели с короткозамкнутым ротором используются как в быту, так и в промышленности, особенно в приложениях, где не требуется регулирование скорости двигателя, таких как погружные насосы, прокатные прессы, шлифовальные машины, конвейеры, компрессоры напольных мельниц и т. Д.Двигатели с фазным ротором, напротив, используются в приложениях с высокими нагрузками, требующих высокого пускового момента, например, в лифтах, кранах, линейных валах, мельничных прессах и т. Д.
Однофазный асинхронный двигатель
Однофазные асинхронные двигатели практически идентичны трехфазным асинхронным двигателям; однако эти двигатели работают от однофазного источника переменного тока. Однофазные асинхронные двигатели широко используются в маломощных устройствах, например, в бытовых приборах. Они меньше по размеру и дешевле в производстве.Поскольку большинство этих двигателей имеют дробную мощность в киловаттах, они также известны как двигатели с дробной мощностью. Статор однофазного асинхронного двигателя представляет собой неподвижную часть с многослойной конструкцией, состоящей из штамповок, аналогичной таковой у трехфазного асинхронного двигателя. Обмотка статора поддерживается пазами на краю этих штамповок. Для активации этой обмотки используется однофазный источник переменного тока. Ротор состоит из пазов, заполненных токопроводящими алюминиевыми или медными стержнями. Индуцированное магнитное поле в роторе будет взаимодействовать с магнитным полем статора, образуя вращающееся поле.Даже с одной обмоткой это поле заставляет двигатель работать в том направлении, в котором он был запущен. Однако, когда двигатели подключены к нагрузке, невозможно обеспечить начало вращения. Чтобы обойти эту трудность, однофазный двигатель временно преобразуется в двухфазный двигатель, чтобы обеспечить вращающийся поток. Помимо основной обмотки статора предусмотрена пусковая обмотка. Пусковая или вспомогательная обмотка сделана очень резистивной, а основная или рабочая обмотка — очень индуктивной.Из-за огромной разницы фаз между этими двумя двигателями создается достаточный крутящий момент для вращения ротора.
Асинхронный двигатель с разделенной фазой
В однофазном асинхронном двигателе с расщепленной фазой, также известном как двигатель с резистивным пуском, вспомогательная или пусковая обмотки расположены на 90 ° от основных обмоток статора. Вспомогательные обмотки вместе с резистором подключаются к основным обмоткам последовательно и параллельно источнику переменного тока. Вспомогательная обмотка имеет несколько витков небольшого диаметра.Вспомогательные обмотки создают разность фаз между обоими потоками, создаваемыми основной обмоткой и обмоткой ротора. Когда двигатель развивает от 75 до 80% своей максимальной скорости, центробежный выключатель отключает эту обмотку, что неэффективно в рабочих условиях. В этом случае двигатель работает только от основной обмотки статора. Такой подход дает очень небольшую разность фаз, и, следовательно, пусковой момент в этих двигателях очень низкий. В результате они используются в приложениях, требующих умеренного начального крутящего момента, например, в вентиляторах, воздуходувках или шлифовальных машинах.
Асинхронный двигатель с конденсаторным пуском
Этот двигатель представляет собой более сложный вариант асинхронного двигателя с расщепленной фазой. Индукции с разделением фаз недостаточно для создания высокого крутящего момента, поскольку разность фаз, вызванная вспомогательными обмотками, мала. Этот недостаток устраняется в конденсаторном пусковом двигателе за счет последовательного включения конденсатора со вспомогательной обмоткой. Этот двигатель оснащен конденсатором сухого типа, работающим на переменном токе. Тем не менее, этот конденсатор не используется постоянно.В этой схеме также используется центробежный переключатель, который отключает конденсатор и вспомогательную обмотку, когда двигатель работает на 75-80% синхронной скорости. Конденсатор потребляет большую разность фаз между током, протекающим через основные обмотки, и током, протекающим через вспомогательные обмотки. В результате, по сравнению с асинхронным двигателем с расщепленной фазой, пусковой крутящий момент этого двигателя чрезвычайно высок и даже на 300 процентов превышает полную нагрузочную способность асинхронного двигателя с разъемным торцом.Этот двигатель используется в приложениях, где требуется высокий пусковой крутящий момент, например, в токарных станках, компрессорах, сверлильных станках и т. Д.
Конденсаторный пусковой конденсатор Асинхронный двигатель
Конденсаторный пусковой конденсаторный двигатель имеет два конденсатора в параллельной конфигурации, соединенных последовательно вспомогательной обмоткой. Один из этих двух конденсаторов используется исключительно для инициирования (пусковой конденсатор) и имеет высокое значение емкости, а другой постоянно соединен с двигателем (рабочий конденсатор) и имеет низкое значение емкости.Пусковой конденсатор соединен последовательно с центробежным выключателем, который выключается, когда скорость двигателя достигает 70% от скорости. Рабочий конденсатор улучшает коэффициент мощности двигателя, обеспечивая дополнительный заряд переменного тока. В рабочем режиме к двигателю подключены как рабочая, так и вспомогательная обмотки. Пусковой момент и КПД этого двигателя очень высоки. Следовательно, это можно использовать в приложениях, где требуется высокий пусковой крутящий момент, например, в холодильнике, кондиционере, потолочном вентиляторе, компрессоре и т. Д.
Асинхронный двигатель с экранированными полюсами
Асинхронный двигатель с экранированными полюсами — это самозапускающийся однофазный асинхронный двигатель с медным кольцом, затеняющим полюса статора. Это медное кольцо служит вторичной обмоткой двигателя, и когда питание подается на статор, в медных кольцах индуцируется магнитный поток. Поток медного кольца взаимодействует с потоком обмоток статора, создавая вращающееся магнитное поле. Асинхронный двигатель с экранированными полюсами состоит из ротора с короткозамкнутым ротором, который взаимодействует с вращающимся магнитным полем.Это взаимодействие создает крутящий момент в роторе и вращает его. Важно отметить, что асинхронный двигатель с экранированными полюсами может вращаться только в одном направлении. Эти двигатели не обладают хорошим коэффициентом мощности и в основном используются в качестве реле в таких устройствах, как вентиляторы, фены, проекторы, проигрыватели и т. Д.
Преимущества однофазных асинхронных двигателей
Основным преимуществом однофазного асинхронного двигателя является простота сборки и сборки. Асинхронный двигатель работает независимо от состояния окружающей среды.В результате двигатель получается мощный и механически прочный.
Недостатки однофазных асинхронных двигателей
Хотя однофазные двигатели механически просты, известно, что они работают медленно или перегреваются при высокой нагрузке. Более того, поскольку однофазные двигатели не запускаются автоматически, они требуют дополнительных схем для запуска, что, в свою очередь, дает больше места для коротких замыканий и отказов.
2-3-3. Характеристики асинхронных двигателей
Как описано в главе 1, синхронная скорость вращения двигателя с магнитным полем определяется по следующей формуле:
N S : Синхронная скорость вращения (оборотов в минуту) [об / мин] N 0 : Синхронная скорость вращения (оборотов в секунду) [об / сек]
f: Частота источника питания [Гц] p: Число полюсов двигателя
Накладка
Когда мы думаем об асинхронных двигателях, это важный момент.То есть катушка должна пересекать магнитное поле, чтобы через катушку протекал ток.
Для этого должна быть относительная разница скоростей между магнитным полем и катушкой.
Из-за этой разницы скоростей двигатель вращается со скоростью, немного меньшей, чем синхронная скорость.
Это отличие скорости от синхронной скорости называется скольжением и обозначается символом s. Скольжение s выражается следующей формулой:
N: Скорость вращения ротора [об / мин] N S : Синхронная скорость вращения [об / мин]
Скольжение обычно выражается в процентах.Скольжение силового асинхронного двигателя составляет от 2 до 3%, когда двигатель работает при номинальной нагрузке. Вышеуказанное значение становится несколько больше для небольших однофазных двигателей.
Скорость вращения и крутящий момент
На рис. 2.40 показаны характеристики асинхронных двигателей. Когда двигатель спроектирован таким образом, что сопротивление алюминиевого проводника ротора уменьшается, его эффективность увеличивается в диапазоне высоких скоростей. И с другой стороны, когда двигатель спроектирован с высоким импедансом, он имеет повышенный крутящий момент в диапазоне низких скоростей.
В области справа от максимального крутящего момента на характеристической кривой увеличение нагрузки не так сильно снижает скорость двигателей с низким сопротивлением. Крутящий момент увеличивается и становится стабильным.
А именно, скорость этих двигателей остается практически неизменной, несмотря на изменения нагрузки.
На рис. 2.41 показаны характеристики этих двигателей с учетом крутящего момента по горизонтальной оси и скорости вращения по вертикальной оси с добавлением тока и эффективности.
Сравнивая этот график с приведенными выше характеристиками двигателей постоянного тока, вы обнаружите следующие характеристики асинхронных двигателей.
- ● Изменения нагрузки не сильно влияют на их скорость, хотя их крутящий момент изменяется.
- ● Связь между крутящим моментом и током не линейна.
ECE 494 — Лаборатория 5: Испытания под нагрузкой трехфазного асинхронного двигателя и измерение пускового тока
Цели
- Для измерения пускового тока при запуске двигателя.
- Для получения нагрузочных характеристик трехфазного асинхронного двигателя с короткозамкнутым ротором.
Оборудование
- Два цифровых мультиметра и измеритель качества электроэнергии Fluke Power с банановыми кабелями со склада
- Один тахометр со склада.
- Измеритель мощности One Black Box
- Нагрузочная стойка с одним резистором. (HMRL Регулируемая тележка)
- Один трехфазный вариак.
- Один настольный источник питания постоянного тока с несколькими диапазонами (PSW 250-4,5)
Фон
Трехфазный асинхронный двигатель имеет трехфазную обмотку на статоре. Ротор либо намотанный, либо из меди. стержни закорочены на каждом конце, и в этом случае это называется короткозамкнутым ротором. Трехфазный ток, потребляемый статором от Трехфазный источник питания создает магнитное поле, вращающееся с синхронной скоростью в воздушном зазоре.Магнитный поле сокращает проводники ротора создают электродвижущие силы, которые вызывают в них токи. Согласно закону Ленца, ЭМП должны противодействовать причина, которая их производит; это означает, что ротор должен вращаться в направлении магнитного поле, созданное статор. Если бы ротор мог развивать синхронную скорость, в нем не было бы наведенной ЭДС. Но за счет потерь скорость всегда меньше синхронной скорости.
В этом эксперименте асинхронный двигатель приводит в действие генератор постоянного тока.Поле генератора постоянного тока возбуждается отдельно. Загрузка Генератор с помощью резисторной нагрузочной стойки, в свою очередь, нагружает двигатель. Когда двигатель приводит в движение нагрузку, он должен создавать больший крутящий момент. Поскольку крутящий момент пропорционален произведению магнитного потока и тока, с увеличением нагрузки относительная скорость (скольжение) между ротором и вращающееся магнитное поле также должно увеличиваться.
Трехфазный асинхронный двигатель работает как трансформатор, вторичная обмотка которого может вращаться.Основное отличие состоит в том, что нагрузка механическая. Кроме того, сопротивление магнитному полю больше из-за наличия воздушного зазора, через который мощность статора передается на ротор. Ток холостого хода двигателя иногда достигает 30-40% от полной нагрузки. ценить. Производительность асинхронного двигателя может быть определена косвенно, нагружая генератор постоянного тока, подключенный к его валу, как есть. сделано в этом эксперименте.
Соответствующие уравнения
- Данные без нагрузки: I a0 = Линейный ток в амперах
- Данные нагрузочного испытания:
- Прочие данные: R a = Измеренное сопротивление статора по фазе
- Потери в сердечнике (включая потери на трение и ветер) по формуле
- Выходная механическая мощность
- Поскольку одна лошадиная сила равна 746 Вт, мы используем преобразование
- Крутящий момент
- Коэффициент мощности при любой нагрузке рассчитывается с использованием
- Эффективность определяется как
(5.1)
В t = Напряжение на клеммах в вольтах.
(5,2)
P 0 = Входная мощность (сумма обоих показаний ваттметра).
(5,3)
N 0 = Скорость двигателя в об / мин.
(5,4)
I a = Линейный ток в амперах.
(5,5)
В t = Напряжение на клеммах в вольтах.
(5,6)
P = входная мощность (сумма обоих показаний ваттметра).
(5,7)
N = скорость двигателя в об / мин.
(5,8)
(5,9)
(5,10)
(5.11)
Где(5,12)
(5,13)
N с = 120 л / с синхронная скорость
(5,14)
f = частота = (60 Гц)
(5,15)
p = количество полюсов = 4
(5,16)
(5.17)
P м (л.с.) = P м (Вт) / 746
(5,18)
(5,19)
(5.20)
Prelab
Асинхронным двигателямприсвоены коды NEMA, которые указывают возможный диапазон их пускового тока.
| Буквы кода NEMA KVA | ||||
| Код KVA / HP Код KVA / HP | ||||
| А | 0–3,14 | л | 9,0–9,99 | |
| B | 3,15–3,54 | M | 10,0-11,19 | |
| С | 3,55–3,99 | N | 11.2-12.49 | |
| Д | 4,0–4,49 | -П | 12,5–13,99 | |
| E | 4,5–4,99 | R | 14,0-15,99 | |
| Ф | 5,0-5,59 | S | 16,0-17,99 | |
| г | 5,6-6,29 | т | 18.0-19,99 | |
| H | 6,3-7,09 | U | 20,0–22,39 | |
| Дж | 7,1–7,99 | В | 22.4 и выше | |
| К | 8,0–8,99 | |||
В таблице дано отношение пусковой кВА (суммарно по всем трем фазам) к номинальной мощности в л.с.
- Учитывая, что наши двигатели рассчитаны на 3 л.с. и имеют код J NEMA, рассчитайте пиковый пусковой ток на однофазный с линейным напряжением 208 В (фазное напряжение 120).
- Определите, как подключить счетчики в схему на рисунке 5.1 для измерения:
- Полная мощность (Вт) асинхронного двигателя. Показать соединения с аналоговыми ваттметрами мощности и измерителями качества электроэнергии (Fluke 43B). Подсказка: двухваттный метод измерения мощности.
- Клемма переменного напряжения, В т асинхронного двигателя.
- Линейный ток I a .
- Напряжение генератора В пост. Тока
- Ток нагрузки генератора I постоянного тока
Часть I. Трехфазный асинхронный двигатель — испытания под нагрузкой
- Запишите спецификации асинхронного двигателя (IM)
- Расположите и измерьте сопротивление грузовой стойки так же, как в предыдущем эксперименте, для 6 различных чтения.Он должен находиться в диапазоне от 500 Ом до 30 Ом. Используйте последовательно две группы тележки, так как они рассчитаны на 120 В. Установки переключателей на двух банках должны быть одинаковыми.
- Подключите цепь, как показано на рисунке 5.1. и поверните реостат шунтирующего поля на панели стола на максимальное сопротивление (CW). Примечание. Убедитесь, что ваши измерители мощности могут выдерживать ток, рассчитанный вами в предварительной лаборатории. Если они не могут тогда вам нужно закоротить катушку тока до тех пор, пока двигатель не будет запущен.Если в вашем измерителе мощности есть токовые клещи и номинальный ток меньше, чем вы определили, поместите зажим вокруг измеряемого провода только после запуска двигателя.
- Подключите источник питания переменного тока от настольной панели к трехфазному вариатору и подключите его выход к цепи.
- Включите настольный источник питания постоянного тока и нажмите кнопку настройки, чтобы отрегулировать выходное напряжение на 240 В и ток (IF) на 0,275 А с помощью его ручек.Перед включением двигателя отрегулируйте выход трехфазного переменного тока на 208 В между фазами.
- Нажмите кнопку выхода источника постоянного тока, чтобы подключить источник постоянного тока 240 В к шунту возбуждения двигателя постоянного тока для генерации тока возбуждения IF.
- При отсутствии нагрузки, подключенной к стойке резисторной нагрузки, нажмите кнопку пуска на панели стенда, чтобы запустить двигатель, отсоедините провод, замыкающий токовую катушку ваттметра, или поместите токовые клещи вокруг провода, чтобы получить показания мощности.Если индикатор ваттметра отклоняется в неправильном направлении, просто поменяйте местами соединения. на стороне напряжения счетчика. Запишите напряжение переменного тока на клеммах В t , скорости, показания обоих ваттметров и напряжения нагрузки постоянного тока V dc . в таблице 5.1 (без данных нагрузки)
- Подключите стойку нагрузки резисторов к клеммам якоря генератора. Для каждого значения нагрузки запишите показания V t , I a , W 1 , W 2 , V dc скорость N и I dc (шкала 10 А) в таблице 5.1. (Данные нагрузочного теста)
- Отключите питание; отключите двигатель от источника питания. Измерьте сопротивление между двумя выводами привода асинхронный двигатель. Резистор обмотки статора R a составляет половину сопротивления значение, измеренное между клеммами источника питания асинхронного двигателя с маркировкой L 1 и L 2 на скамейке. Это происходит потому, что при соединении звездой соединяются две фазы. последовательно между клеммами L 1 и L 2 .
Отчет
- Показать характеристики асинхронного двигателя.
- Полная таблица 5.2.
- Постройте график КПД η, коэффициента мощности pf, скорости N, мощности и крутящего момента. T м против входного тока I a вкл. тот же график.
- Объясните формы графиков pf, об / мин и КПД
Часть II. Пусковой ток.
В этой части вы измеряете пусковой ток вашего асинхронного двигателя. Буквы кода NEMA на двигателе проинформируйте пользователя о примерном пусковом токе. Убедитесь, что вы записали код NEM A и номинальную мощность машины.
Используйте USB-кабель с оптической связью для подключения глюкометра к компьютеру. Запустите программное обеспечение Flukeview на компьютере и убедитесь, что он подключен к вашему счетчику. Если нет, посмотрите в диспетчере устройств, к какому порту он подключен. к, а затем выберите этот порт для программного обеспечения Flukeview.
Используйте ту же схему подключения, что и в части I. Выберите Пусковой ток в меню измерителя. Введите время измерения 1 секунду. Параметр, обозначенный как максимальный ток, на самом деле является током на деление экрана. Настройте зонд и измеритель так, чтобы Прочтите значение пускового тока, рассчитанное в вашей предварительной лаборатории.
Переместите меню пускового тока в начало. Когда вы будете готовы, нажмите на глюкометре кнопку пуска, а затем кнопку пуска двигателя. Метр не начнет измерения, пока не обнаружит текущий поток.Измеритель должен отображать кривую текущего времени. Используйте программное обеспечение Fluxview чтобы зафиксировать этот сигнал для вашего отчета. Лучше всего записать данные в электронную таблицу Excel, чтобы вы могли манипулировать графиком для лучшего просмотра.
Отчет
- Показать зафиксированную волну пускового тока.
- Опишите все примечательные особенности пускового тока. Вы можете их объяснить?
- Какое максимальное абсолютное значение тока во время броска тока?
- Определите расчетный пусковой ток асинхронного двигателя (IM), используя его код NEMA.
- Как долго сохраняется пусковой ток?
| Таблица 5.1: Экспериментальные данные | ||||||||
| справа слева Ом | В т Вольт | I Ампер | Вт 1 Ватт | Вт 2 Ватт | P = W 1 + W 2 Ватт | I постоянного тока Ампер | В постоянного тока Вольт | N об / мин |
| Таблица 5.2: Расчетные данные | |||||
| I a | пф | N | л.с. | т м | η |
Обсуждение
- Кратко обсудите любые два метода запуска и промышленный асинхронный двигатель.
- Отчет о влиянии переключения любых двух клемм трехфазного источника питания на вращение.
Электромагнитные силы и механические реакции обмоток статора до и после межвиткового короткого замыкания ротора в синхронных генераторах
В данной статье исследуется поведение электромагнитных сил обмотки статора до и после межвиткового короткого замыкания ротора (RISC) в синхронном генераторе. В отличие от других исследований, эта статья не только изучает характеристики электромагнитной силы, но также исследует механические реакции, регулярность повреждений и меры противодействия обмотке статора.Во-первых, получены формулы электромагнитной силы онлайн и торцевой части. Затем применяется трехмерная модель конечных элементов трехполюсного имитационного генератора, чтобы получить электромагнитную силу, и обнаруживается опасный паз статора. Наконец, определяется механический отклик каждой концевой обмотки, и особенно рассчитываются направленные деформации носовой части. Он показывает, что возникновение RISC приведет к влиянию электромагнитных сил на составляющие частоты вращения ротора, но составляющая постоянного тока и 2 p раз составляющие частоты вращения ротора по-прежнему остаются основными, которые будут уменьшены.Кроме того, износ изоляции обмотки в том же слое более серьезен, чем в другом слое, усталостное разрушение носа начинается с центра, а износ изоляции носа начинается сверху.
1. Введение
С увеличением мощности генератора электромагнитная сила обмотки, которая создает переменные напряжения и стимулирует вибрации, также увеличивается. Следовательно, обмотка будет более подвержена усталостному разрушению и износу изоляции.
Безусловно, ученые приложили много усилий для изучения свойств электромагнитных сил обмоток.Например, Merkhouf et al. предложили квази-трехмерную электромагнитную модель для расчета сил, действующих на токопроводящие шины в гидрогенераторах [1], в то время как Sanosian et al. продемонстрировали, как насыщение зубцов статора, фактическое распределение магнитного поля внутри прорези, вихревой ток в стержнях демпфера и форма выступающих полюсов влияли на электромагнитные силы в прорези [2]. Согласно закону Био-Савара, метод зеркального отображения использовался для анализа магнитного поля на конце, а электромагнитная сила концевой обмотки была получена с использованием формулы силы ампера [3].Между тем, Гэмпана и Файз всесторонне рассмотрели методы расчета магнитной силы, действующей на торцевую обмотку статора [4]. Сравнивая метод конечных элементов (МКЭ) с методом Био-Савара, было обнаружено, что МКЭ более эффективен для электромагнитного анализа [5]. Андрей Татевосян и Фокина провели исследование электромагнитного поля синхронного генератора на базе трехфазной индукционной машины [6]. Двухмерный анализ связи «поле – цепь – движение» был использован для расчета тока статора в асинхронных машинах с инверторным питанием, а также в гидрогенераторах.Рассчитано распределение электромагнитной силы по обмоткам статора [7, 8]. Для сравнения Станчева и Ячева использовали трехмерный МКЭ для анализа характеристик распределения электромагнитных сил в обмотке статора в турбогенераторах [9, 10]. Чонг и др. исследовали электромагнитную силу эвольвентной части концевых обмоток с помощью 3D МКЭ на ядерном генераторе и получены уязвимые части двойных обмоток на разных слоях [11]. В исх. В [12] электромагнитные силы обмоток трансформаторов при возникновении шунтов магнитного потока изучались на основе метода конечных элементов, который был подтвержден методом двойных рядов Фурье.В [13] был использован усовершенствованный МКЭ для определения характеристики сверхпроводимости, и результаты показывают эффективность применяемого метода для уменьшения потока утечки и электромагнитных сил обмоток. Было обнаружено, что в установившемся режиме в асинхронном двигателе существуют радиальные, окружные и осевые силы, состоящие из постоянной составляющей и синусоидальной составляющей на удвоенной частоте [14]. Кроме того, свойства обмотки якоря, такие как количество слоев обмотки и коэффициент заполнения паза, будут влиять на гармонические составляющие магнитодвижущей силы, приводя к изменениям магнитного поля.Следовательно, электромагнитная сила на обмотках статора будет подвержена влиянию [15]. Это показывает, что выбор правильного шага катушки может снизить содержание гармоник и эффективно улучшить коэффициенты использования проводников [16].
Между тем, Stermecki et al. рассчитал механические деформации концевой обмотки трехфазных асинхронных машин в условиях рабочей нагрузки с помощью 3D МКЭ [17]. Fang et al. проанализировали электромагнитные силы и напряжения на торцевых обмотках статора погружного электродвигателя во время пускового переходного режима [18].Обычно вершина носа, средняя точка эвольвенты и соединение между линейной частью и концевой частью являются наиболее опасными тремя положениями, поскольку они получают максимальные напряжения и деформации в турбогенераторе мощностью 600 МВт [19]. Между тем, силы, действующие на суставную часть верхней части конца катушки, больше, чем на другие части. Кроме того, постоянные составляющие и амплитуды синусоидальных составляющих сил в одних и тех же положениях разных концов катушек в фазовой ленте на асинхронных машинах практически различаются.
Таким образом, большинство исследований сосредоточено на свойствах электромагнитной силы обмотки в нормальных условиях, и лишь немногие из них рассматривали поведение электромагнитной силы в неисправных случаях. Albanese et al. и Zhao et al. исследованы характеристики спектра электромагнитных сил концевой обмотки, режимы, напряжения, деформации и формы основных колебаний в условиях межфазного короткого замыкания [20, 21]. Однако межвитковым замыканием ротора (RISC) обычно пренебрегают, потому что генератор все еще может работать в течение длительного времени до точки планового обслуживания, когда степень неисправности мала.На самом деле, это происходит время от времени из-за многих причин, таких как трение остаточными металлическими частицами в пазах и неправильная сборка, и в этом случае возбуждающая электромагнитная сила, а также другие типичные неисправные свойства отличаются. от того в нормальных условиях. Например, Надараджан и др. предложил гибридный подход к моделированию синхронного генератора путем объединения моделирования dq0 с подходом функции обмотки для межвиткового короткого замыкания [22]. Yucai и Yonggang проанализировали разницу между виртуальной мощностью и реальной электромагнитной мощностью при возникновении RISC [23], в то время как Valavi et al.и Yun et al. исследовали влияние повреждения на плотность потока в воздушном зазоре и метод мониторинга, основанный на искаженной плотности потока [24, 25]. Кроме того, электромагнитные характеристики и механические характеристики, а также соответствующее разнообразие электрических параметров, индуцированных после межвиткового короткого замыкания ротора на турбогенераторе, анализируются Wan et al. [26–28]. Затем для диагностики межвиткового замыкания обмотки ротора были предложены метод нейронной сети БП и бессенсорный метод онлайн-обнаружения [29, 30].
Фактически, авторы также предложили предварительное исследование электромагнитной силы, а также механических реакций концевых обмоток статора в случае RISC; более подробную информацию можно найти в [31]. Однако теоретическая модель в этом предварительном исследовании несколько сложна и трудна для понимания, в то время как модель FE, как и результат расчета, недостаточно точны (в модели FE устанавливается только часть статора / ротора / обмотки). Более того, в вышеупомянутой работе не было экспериментального исследования для подтверждения.В качестве усовершенствования в этой статье мы улучшаем как теоретическую модель, так и 3D-модель КЭ и представляем экспериментальное исследование, чтобы получить более точный результат. Остальная часть статьи организована следующим образом. В разделе 2 представлен теоретический анализ электромагнитной силы обмотки многопарного генератора. Раздел 3 рассчитывает распределение электромагнитной силы на линии и торцевой части соответственно с помощью МКЭ, и это более целесообразно для сравнения с экспериментальными результатами, так как вибрация обмотки торцевой части в основном вызывается электромагнитной силой конца.В то же время он проводит экспериментальное исследование и проверяет исправления теоретического и смоделированного анализа. Затем анализ механической реакции проиллюстрирован в разделе 4, а подробный анализ направленных деформаций и регулярности износа изоляции проводится специально для носовой части с учетом сложной конструкции и слабых мест. Наконец, основные выводы сделаны в разделе 5.
2. Теоретический анализ
2.1. Электромагнитная сила
МДС в генераторе была получена в работе.[32], но ситуация только для одной пары полюсов. Поскольку есть некоторые различия между однопарными и многопарными полюсами, в дальнейшем мы, в частности, выполнили вывод для многопарных генераторов.
Для удобства в этой статье мы игнорируем высшие гармоники, значения которых относительно намного меньше, и нормальный MMF можно записать как где α м — механический угол, указывающий положение по окружности; см. рисунок 1 (d). p — количество пар полюсов, ω — электрическая угловая частота ( ω = pω r , ω r — механическая угловая частота ротор), Ψ — внутренний угол поворота генератора, F с и F r — MMF 1-й гармоники статора и ротора соответственно, и F c — векторное суммирование F s и F r , как показано на рисунках 1 (a) и 1 (b).
Для пояснения мы предполагаем, что межвитковое короткое замыкание происходит в позиции β ′, как показано на Рисунке 1 (d). I f — ток возбуждения, а n m — количество витков короткого замыкания. Воздействие RISC на MMF равно добавлению обратного MMF к нормальному [33, 34]. Для лучшего понимания инвертированная MMF, образованная витками короткого замыкания, также показана на Рисунке 1 (c).Основываясь на принципе сохранения магнитного потока, обратная MMF может быть выражена как где F d может быть расширено рядом Фурье как с
Затем F d может быть уменьшено до
Учитывая, что ротор вращается с ω r , обратный MMF в положении α m может быть окончательно описан как
Как показано на рисунке 1 (b), MMF после RISC может быть записан as где F cs — векторное суммирование F s , F r и F dp (b), как показано на рисунке.
Сравнение рисунка 1 (c) и уравнения (7) с результатом, приведенным в работе. [32] (Рисунок 2 и уравнение (11) в этой ссылке) показано, что многопарные генераторы будут иметь распределение MMF, отличное от такового у однопарных генераторов.
Плотность магнитного потока (MFD) складывается из MMF и проницаемости на единицу площади (PPUA) и может быть получена путем умножения этих двух [33], где Λ 0 — PPUA (Λ 0 = мкм 0 /), представляет собой среднее значение радиальной длины воздушного зазора между сердечником статора и сердечником ротора (как показано на рисунке 1 (d)), а мкм 0 — проницаемость воздуха / вакуума.
Без учета влияния соединения обмоток ток обмотки на α м можно записать как где l и — эффективная длина и линейная скорость магнитного потока, пересекающего стержень статора, и Z — реактивное сопротивление обмотки статора.
Согласно закону электромагнитной индукции сила, действующая на обмотку, верхняя линия которой (см. Рисунок 3 (f)) находится в окружном положении α м , может быть записана как где F E и F L — силы, действующие на концевую часть и линейную часть, соответственно, а F Ek — электромагнитная сила в произвольной точке K концевой обмотки, а полоса, чтобы указать вектор пробела. l конец — изгиб концевой части, ( α м + α k ) относится к окружному положению точки K , k
83 e 83 e — коэффициент MFD конечной точки K , а θ k — угол между вектором тока и MFD.Как указано в уравнениях (10) и (11), в нормальных условиях электромагнитная сила как на линейной части, так и на концевой части включает в основном постоянную составляющую и гармоническую составляющую при 2 pω r ( то есть 2 ω ), что согласуется с результатом, представленным в [2].[9]. Также предполагается, что электромагнитная сила в случае RISC имеет гораздо больше компонентов, а частоты этих новых компонентов являются временами механической частоты вращения ротора ω r . Поскольку амплитуда F dn намного меньше, особенно когда гармонический порядок n становится больше, эти новые компоненты в основном являются слабыми гармониками, поэтому постоянный ток и составляющая 2 ω остаются основными. .Однако их амплитуды уменьшаются из-за уменьшения MMF из-за короткого замыкания, как показано на рисунках 1 (a) и 1 (b), и F cs меньше, чем F с .
Хотя RISC уменьшает первичные составляющие (постоянный ток и 2 ω ), он вносит новые гармоники, которые могут быть ближе к собственным частотам обмотки. Следовательно, обмотка потенциально способна выдержать симпатическую вибрацию, которая с высокой вероятностью может повредить обмотку как с точки зрения металлической конструкции, так и с точки зрения изоляционных свойств.Поэтому изучение этих новых компонентов силы имеет большое значение. Для сравнения амплитуды первых 6 гармоник силы трехполюсного синхронного генератора, который является объектом исследования в следующем разделе, перечислены в таблице 1.
| ||||||||||||||||||||||||||||||||||||||||||||||
2.2. Механический отклик
Конструкция обмотки на конце статора показана на Рисунке 2 (а). Электромагнитная сила может вызвать вибрацию конца обмотки статора и привести к износу изоляции, а линейная часть обмотки статора закреплена в пазу статора и закреплена щелевым клином.Следовательно, влиянием электромагнитной силы линейной части на концевую часть можно пренебречь. Механическая модель системы статор-обмотка показана на рисунке 2 (б). Уравнение динамики может быть представлено следующим образом: где M, — масса концевой части обмотки статора, D, — демпфирование, обеспечиваемое стяжками, K, — жесткость, обеспечиваемая как эластичностью материала обмотки, так и связующая линия, а x ( т ) — матрица смещения / перемещения материальных точек.
В частности, возбуждение электромагнитной силы на концевой обмотке соответствует отклику вибрации первого порядка. Смещение представляет собой амплитуду вибрации. Поскольку электромагнитная сила является периодической, соответствующая реакция также будет периодической, и эта периодичность смещения концевой обмотки представлена вибрацией. Вибрация усугубит износ изоляции обмотки и сократит срок службы генератора.
Далее мы проведем расчет методом конечных элементов с помощью электромеханической связи и исследования эксперимента.Анализ методом конечных элементов включает в себя расчет как электромагнитной силы, так и механического отклика, в то время как экспериментальное исследование в основном проверяет колебания обмотки (отклик на возбуждающие силы). Более подробную информацию можно найти в Разделе 3.
3. FEA и экспериментальное исследование
3.1. FEA и экспериментальная установка
Мы используем прототип генератора типа MJF-30-6 в качестве объекта исследования, как показано на рисунке 3 (а). Он находится в Государственной ключевой лаборатории альтернативных электроэнергетических систем с возобновляемыми источниками энергии, П.Р. Китай. Основные параметры генератора перечислены в таблице 2, а подключение обмотки статора фазы A показано на рисунках 3 (c) и 3 (d).
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||