


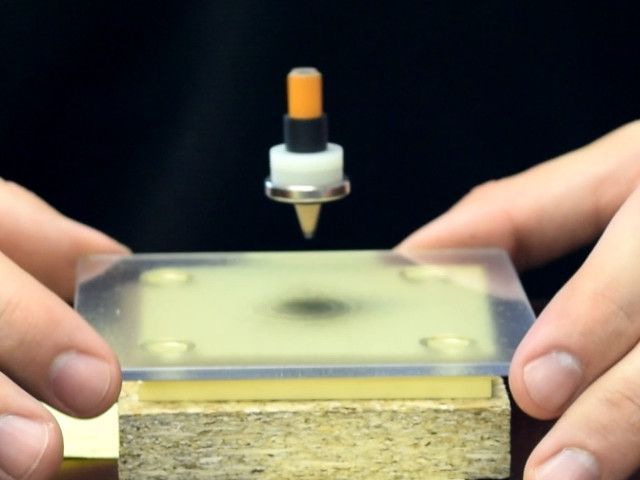
Ардуино левитация горшка с карликовым деревом
На идею этого урока натолкнул проект краудфандинговой платформы Kickstarter под названием «Air Bonsai», действительно красивый и загадочный, который сделали японцы.

Но любая загадка может быть объяснена, если посмотреть внутрь. Фактически это магнитная левитация, когда есть объект, левитирующий сверху, и электромагнит, контролируемый схемой. Давайте попробуем вместе реализовать этот загадочный проект.
Шаг 1: Как это работает

Мы выяснили, что схема устройства на Кикстартере была довольно сложной, без какого-либо микроконтроллера. Не было возможности найти её аналоговую схему. На самом деле, если посмотреть более внимательно, принцип левитации довольно прост. Нужно сделать магнитную деталь, «плавающую» над другой магнитной деталью. Основная дальнейшая работа заключалась в том, чтобы левитирующий магнит не падал.
Было также предположение, что сделать это с Arduino на самом деле намного проще, чем пытаться понять схему японского устройства. На самом деле всё оказалось намного проще.
Магнитная левитация состоит из двух частей: базовой части и плавающей (левитирующей) части.
Основание
Эта часть находится внизу, которая состоит из магнита для создания круглого магнитного поля и электромагнитов для управления этим магнитным полем.
Каждый магнит имеет два полюса: север и юг. Эксперименты показывают, что противоположности притягиваются и одинаковые полюса отталкиваются. Четыре цилиндрических магнита помещаются в квадрат и имеют одинаковую полярность, образуя круглое магнитное поле вверх, чтобы вытолкнуть любой магнит, который имеет один и тот же полюс между ними.
Есть четыре электромагнита вообще, они помещены в квадрат, два симметричных магнита — пара, и их магнитное поле всегда противоположно. Датчик Холла и цепь управляют электромагнитами. Создаем противоположные полюса на электромагнитах током через них.
Плавающая деталь
Деталь включает в себя магнит, плавающий над основанием, который может нести небольшой горшок с растением или другие предметы.
Магнит сверху поднимается магнитным полем нижних магнитов, потому что они с одинаковыми полюсами. Однако, как правило, он склоняется к падению и притягиванию друг к другу. Чтобы предотвратить переворот и падение верхней части магнита, электромагниты создадут магнитные поля, чтобы толкать или тянуть, дабы сбалансировать плавающую часть, благодаря датчику Холла. Электромагниты управляются двумя осями X и Y, в результате чего верхний магнит поддерживается сбалансированным и плавающим.
Контролировать электромагниты нелегко, требуется ПИД-регулятор, который подробно обсуждается на следующем шаге.
Шаг 2: ПИД-регулятор (PID)

Из Википедии: «Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.»
В простом понимании: «ПИД-регулятор вычисляет значение «ошибки» как разность между измеренным [Входом] и желаемой установкой. Контроллер пытается свести к минимуму ошибку, отрегулировав [выход]».
Итак, вы указываете PID, что измерить (Вход), какое значение вы хотите и переменную, которая поможет иметь это значение на выходе. Далее ПИД-регулятор настраивает выходной сигнал, чтобы сделать вход равным установке.
Для примера: в автомобиле у нас три значения (Вход, Установка, выход) будут — скорость, желаемая скорость и угол педали газа, соответственно.
В данном проекте:
- Вход представляет собой текущее значение в реальном времени от датчика холла, которое обновляется непрерывно, поскольку положение плавающего магнита будет меняться в реальном времени.
- Заданное значение — это значение от датчика холла, которое измеряется, когда плавающий магнит находится в положении баланса, в центре основания магнитов. Этот индекс фиксирован и со временем не изменяется.
- Выходной сигнал — скорость для управления электромагнитами.
Стоит поблагодарить сообщество любителей Arduino, которое написало PID-библиотеку и которая очень проста в использовании. Дополнительная информация об Arduino PID есть на официальном сайте Arduino. Нам нужно использовать пару ПИД-регуляторов под Arduino, один для оси X и другой для оси Y.
Шаг 3: Комплектующие

Список комплектующих для урока получается приличным. Ниже приведен список компонентов, которые вы должны купить для этого проекта, убедитесь, что у вас есть все перед запуском. Некоторые из компонентов очень популярны, и, вероятно, вы найдете их на своем собственном складе или дома.
- 1x — LM324N
- 4x — левитационная катушка

- 2x — SS495a датчик Холла
- 1x — 12V 2A DC адаптер
- 8x — Кольцевой магнит D15*4 мм
- 1x — Разъем питания постоянного тока
- 4x — Кольцевой магнит D15*3 мм
- 1x — Arduino pro mini
- 1x — Модуль L298N
- 1x — 14 гнездовой сокет
- 2x — Магнит D35*5мм
- 2x — Резистор 5.6 KОм
- 2x — Резистор 180 КОм
- 2x — Резистор 47 KОм
- 2x- 10 Kом потенциометр
- 1x — Акриловый лист A5 размера
- 1x — Деревянный горшок
- 1x — PCB макет
- 8x — 3 мм винт
- провода
- Мини-растение (суккулент, кактус, мини-бонсай, карликовое дерево)

Шаг 4: Инструменты
Вот список инструментов, наиболее часто используемых:
- Паяльник
- Ручная пила
- Мультиметр
- Дрель
- Осциллограф (по желанию, можете использовать мультиметр)
- Настольное сверло
- Горячий клей
- Плоскогубцы
Шаг 5: LM324 Op-amp, L298N драйвер и SS495a

LM324 Op-amp
Операционные усилители (op-amp) являются одними из наиболее важных, широко используемых и универсальных схем, используемых сегодня.
Мы используем операционный усилитель для усиления сигнала от датчика Холла, цель которого — увеличить чувствительность, чтобы ардуино легко распознало изменение магнитного поля. Изменение нескольких мВ на выходе датчика холла, после прохождения усилителя может измениться на несколько сотен единиц в Arduino. Это необходимо для обеспечения плавного и стабильного функционирования ПИД-регулятора.
Обычным операционным усилителем, который мы выбрали, является LM324, это дешево, и вы можете купить его в любом магазине электроники. LM324 имеет 4 внутренних усилителя, которые позволяют гибко его использовать, однако в этом проекте нужны только два усилителя: один для оси X, а другой для оси Y.
Модуль L298N
Двойной H-мост L298N обычно используется для управления скоростью и направлением двух двигателей постоянного тока или с легкостью управляет одним биполярным шаговым двигателем. L298N может использоваться с двигателями с напряжением от 5 до 35 В постоянного тока.
Существует также встроенный регулятор 5V, поэтому, если напряжение питания до 12 В, вы также можете подключить источник питания 5 В от платы.
В этом проекте использован L298N для управления двумя парами катушек электромагнита и использован выход 5 В для питания Arduino и датчика холла.
Распиновка модулей:
- Out 2: пара электромагнитов X
- Out 3: пара электромагнитов Y
- Входное питание: вход постоянного тока 12 В
- GND: Земля
- Выход 5v: 5v для датчиков Arduino и холла
- EnA: Включает сигнал PWM для выхода 2
- In1: Включить для выхода 2
- In2: Enable for Out 2
- In3: Включить для выхода 3
- In4: Включить для выхода 3
- EnB: Включает PWM-сигнал для Out3
Подключение к Arduino: нам нужно удалить 2 перемычки в контактах EnA и EnB, затем подключить 6 контактов In1, In2, In3, In4, EnA, EnB к Arduino.
SS495a Датчик Холла
SS495a — это линейный датчик Холла с аналоговым выходом. Обратите внимание на разницу между аналоговым выходом и цифровым выходом, вы не можете использовать датчик с цифровым выходом в этом проекте, он имеет только два состояния 1 или 0, поэтому вы не можете измерить выход магнитных полей.
Аналоговый датчик приведет к диапазону напряжений от 250 до Vcc, который вы можете прочитать с помощью аналогового входа Arduino. Для измерения магнитного поля в обеих осях X и Y требуются два датчика холла.
Шаг 6: Неодимовые магниты NdFeB (неодим-железо-бор)

Из Википедии: «Неодим — химический элемент, редкоземельный металл серебристо-белого цвета с золотистым оттенком. Относится к группе лантаноидов. Легко окисляется на воздухе. Открыт в 1885 году австрийским химиком Карлом Ауэром фон Вельсбахом. Используется как компонент сплавов с алюминием и магнием для самолёто- и ракетостроения.»
Неодим — это металл, который является ферромагнитным (в частности, он показывает антиферромагнитные свойства), что означает, что подобно железу его можно намагнитить, чтобы он стал магнитом. Но его температура Кюри составляет 19К (-254 ° С), поэтому в чистом виде его магнетизм проявляется только при чрезвычайно низких температурах. Однако соединения неодима с переходными металлами, такими как железо, могут иметь температуры Кюри значительно выше комнатной температуры, и они используются для изготовления неодимовых магнитов.
Сильный — это слово, которое используют для описания неодимового магнита. Вы не можете использовать ферритовые магниты, потому что их магнетизм слишком слаб. Неодимовые магниты намного дороже ферритовых магнитов. Маленькие магниты используются для основы, большие магниты для плавающей/левитирующей части.
Внимание! Вам нужно быть осторожным при использовании неодимовых магнитов, так как их сильный магнетизм может навредить вам, или они могут сломать данные вашего жесткого диска или других электронных устройств, на которые влияют магнитные поля.
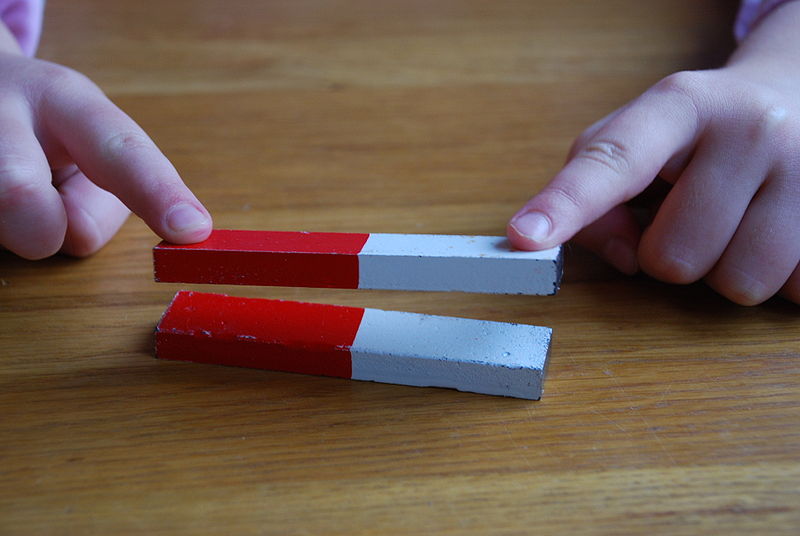
Совет! Вы можете отделить два магнита, потянув их в горизонтальное положение, вы не сможете отделить их в противоположном направлении, потому что их магнитное поле слишком сильное. Они также очень хрупкие и легко ломаются.
Шаг 7: Готовим основание

Использовали небольшой терракотовый горшок, который обычно используется для выращивания суккулента или кактуса. Вы также можете использовать керамический горшок или деревянный горшок, если они подходят. Используйте сверло диаметром 8 мм, чтобы создать отверстие в нижней части горшка, которое используется для удерживания гнезда постоянного тока.
Шаг 8: 3D-печать плавающей части

Если у вас есть 3D-принтер — здорово. У вас есть возможность сделать все с помощью него. Если принтера нет — не отчаивайтесь, т.к. вы можете использовать дешевую услугу 3D-печати, которая сейчас очень популярна.
Для лазерной резки файлы также в архиве выше — файл AcrylicLaserCut.dwg (это autocad). Акриловая деталь используется для поддержки магнитов и электромагнитов, остальные — для покрытия поверхности терракотового горшка.
Шаг 9: Подготовка SS495a модуля датчика Холла


Вырежьте макет PCB на две части, одну часть, чтобы прикрепить датчик холла, а другой — к цепи LM324. Прикрепите два магнитных датчика перпендикулярно печатной плате. Используйте тонкие провода для соединения двух штырей датчиков VCC вместе, сделайте то же самое с контактами GND. Выходные контакты отдельно.
Шаг 10: Цепь Op-amp
Припаяйте гнездо и резисторы к печатной плате, следуя схеме, обратив внимание на то, чтобы поместить два потенциометра в одном направлении для более легкой калибровки позже. Присоедините LM324 к гнезду, затем подключите два выхода модуля датчиков холла к цепи op-amp.
Два выходных провода LM324 подключите к Arduino. Вход 12 В с входом 12 В модуля L298N, выход 5 В модуля L298N к 5V потенциометра.
Шаг 11: Сборка электромагнитов
Соберите электромагниты на акриловый лист, они закреплены в четырех отверстиях вблизи центра. Затяните винты, чтобы избежать движения. Поскольку электромагниты симметричны по центру, они всегда находятся на полюсах напротив, так что провода на внутренней стороне электромагнитов соединены вместе, а провода на внешней стороне электромагнитов подключены к L298N.
Протяните провода под акриловым листом через соседние отверстия, чтобы подключиться к L298N. Медный провод покрыт изолированным слоем, поэтому вы должны удалить его ножом, прежде чем вы сможете припаять их вместе.
Шаг 12: Сенсорный модуль и магниты
Используйте горячий клей для фиксации модуля датчика между электромагнитами, обратите внимание, что каждый датчик должен быть квадратным с двумя электромагнитами, один на передней и другой на задней панели. Попробуйте выполнить калибровку двух датчиков как можно более централизованно, чтобы они не перекрывались, что сделает датчик наиболее эффективным.
Следующий шаг — собрать магниты на акриловой основе. Объединяя два магнита D15*4 мм и магнит D15*3 мм вместе, чтобы сформировать цилиндр, это приведет к тому, что магниты и электромагниты будут иметь одинаковую высоту. Соберите магниты между парами электромагнитов, обратите внимание, что полюса восходящих магнитов должны быть одинаковыми.
Шаг 13: Разъем питания постоянного тока и выход L298N 5V

Припаяйте гнездо питания постоянного тока двумя проводами и используйте термоусадочную трубку. Подключенный разъем питания постоянного тока к входу модуля L298N, его выход 5 В будет подавать питание на Arduino.
Шаг 14: L298N и Arduino

Подключите модуль L298N к Arduino, следуя приведенной выше схеме:
L298N → Ардуино
5V → VCC
GND → GND
EnA → 7
В1 → 6
В2 → 5
В3 → 4
В4 → 3
EnB → 2

Шаг 15: Arduino Pro Mini программер

Поскольку у Arduino pro mini нет USB-порта для последовательного порта, вам необходимо подключить внешний программатор. FTDI Basic будет использоваться для программирования (и питания) Pro Mini.
Шаг 16: Подготовка плавающей части

Соедините два магнита D35*5 для увеличения магнетизма.
Шаг 17: Калибровка
Загрузите программу ReadSetpoint.ino в Arduino, которую можно скачать выше. Эта программа будет считывать значения датчика Холла и отправлять их на компьютер через последовательный порт. Откройте COM-порт, чтобы увидеть его. Подключите 12 В постоянного тока к гнезду питания постоянного тока, вы также используете осциллограф для считывания значения датчика.
Наблюдайте значения на экране и внесите корректировки, установив два потенциометра. Наилучшее значение — 560, при этом выход датчика составляет около 2,5 В. После установки заданного значения поместите плавающий магнит над базовой частью и встряхните его, чтобы увидеть изменение значения установки (Setpoint) на экране.
Шаг 18: Загрузка основной программы
После калибровки значения установки (Setpoint) самое время получить результаты. Загрузите основную программу Levitation.ino, которая приведена выше.
Используйте супер клей для фиксации магнита и держателя магнита, который ранее был напечатан на 3D-принтере. После загрузки основной программы вы можете внести небольшие корректировки на потенциометры, чтобы плавающая деталь была зафиксирована в центре.
Шаг 19: Собираем всё вместе
Сначала прикрепите гнездо питания постоянного тока к горшку, затем поместите оставшиеся части в горшок. Наконец, используйте оставшийся акриловый лист, чтобы сделать поверхность горшка.
Шаг 20: Подготовка растения
Прикрепите деревянный горшок к плавающей части магнита. Мы использовали маленький кактус для посадки. Вы можете использовать кактус или суккулент или любой мини-бонсай, который является маленьким и легким.
Шаг 21: Финальный результат


Наслаждайтесь своим результатом, благодаря вашим усилиям вы сделали отличный проект, который теперь будет радовать вас и ваших друзей.
РадиоКот :: Levitator
РадиоКот >Схемы >Аналоговые схемы >Игрушки >Levitator
Левитация – одно из воплощений человеческой мечты о полете.
Созерцание парящего кристалла – хороший способ релаксации и пополнения пси-энергии.
Кристаллом мною назван левитирующий неодимовый магнит – он обклеен природными кристаллами пирита и халькопирита и имеет сходство с цельным кристаллом.
Согласно теореме Ирншоу, являющейся следствием закона Гаусса, левитация статических объектов в статическом электромагнитном поле невозможна. Теорема применима не только к точечным зарядам, но и к протяженным упругим телам и говорит, что их свободный подвес в электростатическом, магнитостатическом и (или) гравитационном поле будет всегда неустойчив. Однако существует возможность сделать левитацию реальной, например, используя электронную стабилизацию – электромагниты, управляемые посредством электроники.
Поскольку действительную природу магнетизма и гравитации никто пока не объяснил, то работу левитатора можно описать так:
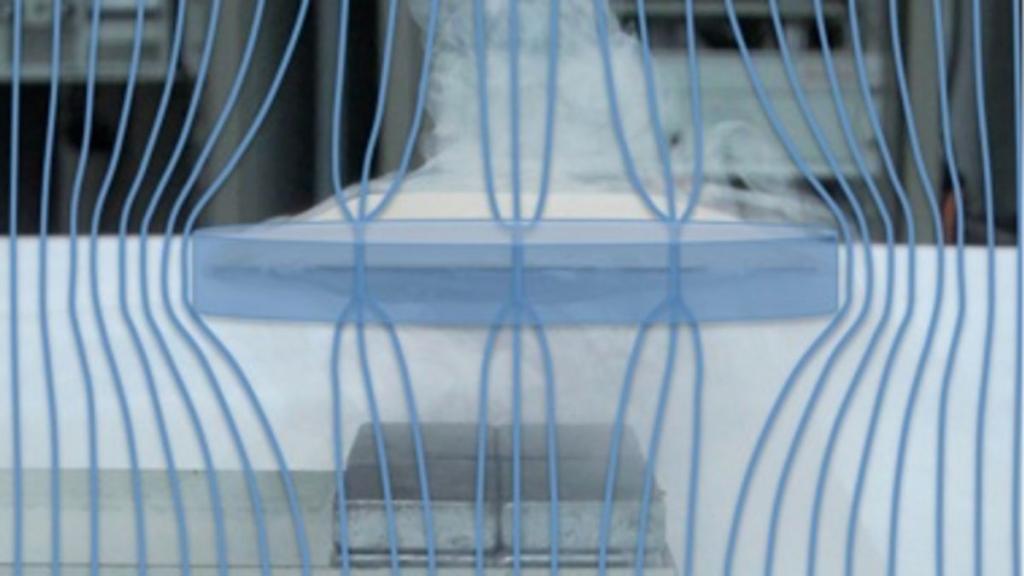
Суммарная картина магнитных силовых линий неодимовых магнитов, расположенных в основании левитатора представляет собой поле магнитного кольца с прямоугольным поперечным сечением. Видно, что в точках 1 и 2 магнитное поле меняет направление. Если поместить в точку 1 небольшой магнит, то мы почувствуем, что его перемещению по вертикали препятствует магнитное поле кольца и гравитация (вначале он может еще перевернутся). По вертикали он как бы в ловушке. В горизонтальной плоскости наш магнит норовит выскользнуть и притянуться к кольцу. Тут мы ему устраиваем ловушку в горизонтальной плоскости – отслеживаем его положение с помощью датчиков, и далее с помощью 3-х пар электромагнитов A,B,C расположенных в основании левитатора возвращаем его каждый раз в точку 1. Энергия электромагнитов расходуется только на компенсацию небольших смещений левитирующего магнита в горизонтальной плоскости. По сути, энергия только перекачивается из одной пары катушек в другую. Потребление энергии при этом намного меньше, чем в системах, в которых электромагнит сверху – в них он должен еще компенсировать действие на левитирующий предмет силы тяжести.
Картина силовых линий магнитного поля кольца, электромагнита и магнита.
При конструировании левитатора я ознакомился с патентом US20070170798: https://www.freepatentsonline.com/20070170798.pdf Вот некоторые рисунки с этого патента:
Контроль левитирующего магнита осуществляется с помощью оптических датчиков положения и 3-х пар электромагнитов. Смещение магнита влево компенсируется за счет сочетания действия южного полюса электромагнита A1 и северного полюса электромагнита A2. Конденсатор 23 помогает противостоять любым быстрым смещениям магнита.
Также была использована идея Nicanor Apostol: https://www.youtube.com/user/nick500453/videos для контроля положения левитирующего магнита с помощью датчиков магнитного поля – датчиков Холла.
Операционные усилители включены в дифференциальном режиме. Каждый датчик Холла выдает сигнал на два ОУ, на прямой вход одного и инвертирующий другого.
После некоторых раздумий и экспериментов получилась такая схема:
При появлении кристалла в зоне левитации, геркон замыкается и на схему подается питание, она начинает генерировать, возникает самовозбуждение системы – кристалл парит.
Устойчивая левитации кристалла достигается небольшим подгибанием датчиков Холла в вертикальной плоскости. При этом можно ориентироваться на потребление тока левитатором. При точной настройке оно будет менее 100mA, и при попытке сместить левитирующий кристалл по горизонтали в какую-либо сторону будут ощущаться одинаковые усилия. Также при точной настройке практически пропадает шум, связанный с работой электромагнитов. На первом ОУ и TL431 собран супервизор питания. Если при левитации кристалла пропадает синяя подсветка, значит, напряжение батареи менее 3.6V и её следует зарядить.
Кстати, в моем случае наблюдается интересное явление раскручивания кристалла против часовой стрелки. Если его слегка закрутить, то дальше он раскручивается сам – примерно до 50-140 оборотов в минуту, в зависимости от напряжения питания и высоты левитации. Связано это с неоднородностью намагниченности кристалла и с тем, что включенные по схеме звезда электромагниты левитатора в какой-то момент начинают работать подобно трехфазному двигателю.
Катушки электромагнитов использованы с двигателя ведущего вала видеомагнитофона (типа как на фото ниже). Индуктивность каждой 330mkH, сопротивление 2.2 Ohm. Направление намотки этих катушек видно на фото – это важно для правильной работы левитатора. В конструкции использовано шесть неодимовых магнитов 15*5*5мм, шесть 15*6*2мм и один диаметром 20мм, толщиной 5мм в кристалле. ОУ LMV324 можно заменить аналогичным по параметрам «rail to rail op amp». Вместо IRF7319 подойдёт IRF7389. В качестве ферромагнитного сердечника катушек электромагнитов использованы болты и гайки М4, они же и скрепляют всю конструкцию.
Разводка платы левитатора сделана в одном слое с помощью трассировщика Topo-R: https://eda.eremex.ru/ . На второй стороне платы фольга оставлена, она соединена с «землей» в двух точках. С кромок отверстий под выводы катушек, датчиков, светодиода фольга удалена зенкованием сверлом, диаметр которого в 3…4 раза больше диаметра отверстий. Стеклотекстолит толщиной 1мм.
Вид собранной платы с двух сторон. Магниты держатся за счет взаимного притяжения , дополнительно они приклеены к плате суперклеем. Между катушками электромагнитов и платой проложена полоска двухстороннего скотча.
Для полной картины отмечу, что возможны варианты магнитной левитации без всякой электроники: https://www.antigravity.net.au/ . Вот некоторые:
1. Если придать магниту в точке 1 быстрое вращение вокруг вертикальной оси (сделать из него волчок), то он там и будет оставаться. Сам по себе волчок стремится сразу перекувыркнуться и упасть. Раскрученный же волчок этого сделать не может – ему приходится противодействовать моменту инерции. Минус такого решения – ограниченное несколькими минутами время левитации.
2. Известно, что диамагнетики выталкиваются магнитным полем. Если взять кусок пиролитического графита (диамагнетика) – наш магнитик с удовольствием будет над ним левитировать. Минус – небольшая высота левитации, как следствие отсутствия в природе сильных диамагнетиков. Или сильных магнитов в маленьком объеме.
3. Вариант предыдущего случая – использовать «идеальный» диамагнетик, каковым есть по сути сверхпроводник. Например, высокотемпературный сверхпроводник с Пандоры – анобтаниум. Имеем приличную высоту парения сверхпроводника над магнитной подставкой. Минус решения – дороговизна. Нерафинированный анобтаниум стоит около двадцати миллионов долларов за килограмм, очищенный повышает стоимость вдвое – до сорока миллионов.
Этот серый камушек идет по 20 миллионов за кило.
Предвидя вопросы, отвечу на некоторые из них:
1. Парящий кристалл есть нельзя, он не вкусный и не съедобный.
2. Если ты думаешь, что как магнитный железняк может притягивать железо, ты так же можешь заставить его притянуть куски керамики, то ты заблуждаешься,… магнитный железняк может притягивать железо, но не взаимодействует с медью. Таково движение Дао (из китайского философского трактата Хуайнань-цзы).
3. Именно анобтаниум вызвал появление на Пандоре таких изумительных геологических достопримечательностей, как каменные арки и парящие горы.
Видео работы: https://www.dropbox.com/s/wnsko62jezjitaf/Levi.mkv
Вопросы по конструкции можно задать здесь: https://radiokot.ru/forum/viewtopic.php?f=3&t=4810
Разводку платы прилагаю. 🙂
… И некоторые идеи вдогонку — вариант Levi_2 (разводку платы прилагаю):
Отличие – низ левитатора подсвечивается 2-мя светодиодами, которые вынесены ближе к краям платы. Должно смотреться эффектнее, ярче.
Подсветку внизу можно сделать другим цветом, при разряде батареи будет пропадать только нижняя подсветка.
В качестве левитирующего кристалла заманчиво применить флюорит — флюоресцирующий минерал. Cиний светодиод подсветки поменять на ультрафиолетовый ..
Файлы:
Документ PDF
Levi_2
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Волчок-левитрон или магнитная левитация своими руками
Помните популярную игрушку из 90-х «Левитрон»? Это волчок, который висит в воздухе за счет магнитных сил. Попробуем сделать сами такую игрушку из подручных материалов и понаблюдаем за магнитной левитацией.
Нам потребуются следующие материалы:
- Деревянная доска, карандаш, изоляционная лента, пластиковые или латунные шайбы, почтовые бумажные, пластиковые или картонные открытки.
- Тринадцать дисковых неодимовых магнитов размерами 12*3 мм, марки N52; один широкий кольцевой размерами 20 (наружный диаметр) * 10 (внутренний диаметр) мм, марки N42.
Шаг 1: Раскладка
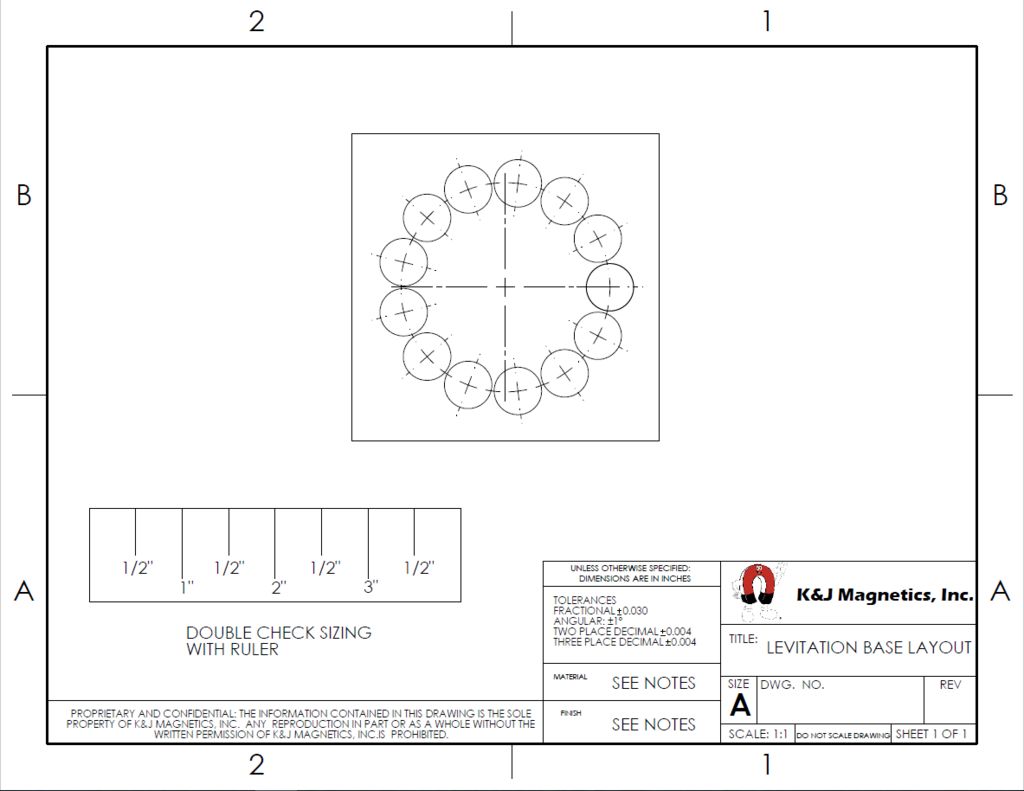
В игрушке «Левитрон», которая была популярна в 90-х годах, и которая больше не продается (или продается?), использовались два специальных керамических кольцевых магнита. Мы же с вами сделаем игрушку, используя несколько стандартных неодимовых магнитов.
Как сделать левитрон с подставкой своими руками? В первую очередь, распечатайте на принтере макет, изображенный выше. Он нужен для разметки отверстий под установку магнитов. Обязательно проверьте размеры с помощью линейки. Затем вырежьте макет по квадратной разметке.
Шаг 2: Вырезаем деревянное основание

Вырежьте деревянную заготовку такого же размера, как и бумажный макет. Вы можете использовать для изготовления основания любой пиломатериал, но его толщина должна быть не менее 6 мм.
Шаг 3: Переносим макет на основание

Далее приклейте бумажный макет к деревянному блоку. С помощью сверла Форстнера диаметром 12 мм накерните центр в каждом круге. Это необходимо для последующего точного сверления отверстий.
Шаг 4: Сверлим отверстия

Пришло время сверлить отверстия. Чтобы получились качественные отверстия с плоским дном, для сверления используйте сверло Форстнера диаметром 12 мм. Установите на сверлильном станке глубину сверления так, чтобы дно отверстия находилось чуть ниже верхней поверхности блока. Нужно, чтобы магниты располагались как можно ближе к поверхности.
Во время сверления макет должен оставаться наклеенным на деревянный блок, чтобы сверление было более точным.
Шаг 5: Устанавливаем магниты
Отверстия просверлены. Пора вставлять магниты. Они должны быть обращены одним из полюсов вверх. Установим их северным полюсом вниз. Чтобы определить, где северная, а где южная стороны, используйте маркированный магнит D68PC-RB или другой способ.
Возьмите стопку марки N52 и вставьте по одному в каждое отверстие. Используйте что-нибудь для проталкивания их вглубь отверстий. Можете воспользоваться деревянным дюбелем.
Во время установки, поместите блок на стальную пластину, чтобы магниты удерживались на дне отверстий.
Убедитесь, что магниты располагаются как можно глубже в отверстиях Левитатора.
Шаг 6: Делаем волчок

Далее делаем волчок. Отрежьте карандаш длиной примерно 40 мм. У него должен быть заострен конец. Намотайте на карандаш изоленту, чтобы увеличить диаметр для установки внутрь кольцевого магнита.
Разместите кольцевой магнит на карандаше так, чтобы северный полюс был обращен вниз (в сторону острого конца карандаша). Для увеличения веса волчка, наденьте на него несколько пластмассовых шайб.
В последствии вам придется экспериментировать с весом и высотой центра тяжести волчка, чтобы он работал так, как надо. Для этого может потребоваться очень много времени.
Шаг 7: Тестируем
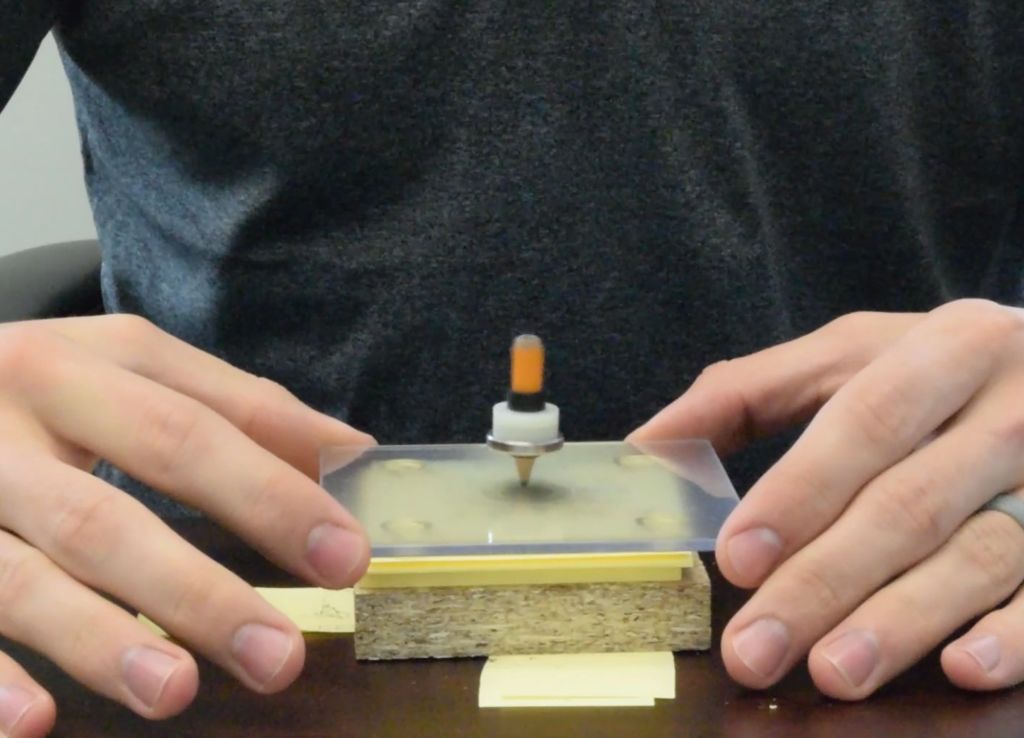
Отрежьте кусок пластика или картона, чтобы сделать платформу. Платформа укладывается поверх основания с магнитами. Волчок раскручивается на этой платформе, затем платформа с волчком поднимается, чтобы волчок попал в «магнитную яму».
Если вы сможете заставить волчок висеть, то вам крупно повезло. Чтобы волчок работал как следует, вам, возможно, придется потратить на это уйму времени.
Вот несколько советов, как можно отрегулировать работу устройства. Во-первых, нужно сбалансировать основание. Используйте картонные открытки или листки бумаги для заметок, чтобы поднять стороны основания и выровнять его.
Если волчок продолжает отклоняться в одну сторону, вам нужно будет поднять эту сторону. Здесь лучше использовать трехточечную систему нивелирования.
Вес волчка также является ключевым фактором. В устройстве есть некая «яма», то есть зона, магнитное поле в центре которой немного слабее, чем у краев. Чтобы волчок оставался в этой яме, вам нужно либо добавить ему вес, либо снизить его.
Если волчок сразу вылетает, то вам, вероятно, нужно добавить ему веса. Если волчок не отрывается от платформы, возможно, он слишком тяжелый.
Также нужно убедиться, что высота платформы выбрана правильно. Если волчок плохо вращается, попробуйте подложить бумажки или картонки под платформу.
Посмотрите видео, чтобы узнать, как это работает!
Шаг 8: Печать на 3D-принтере
Если у вас есть 3D-принтер, то распечатайте игрушку на нем. Вот ссылка на файлы в ThingiVerse.
Если желаете, можете прочитать статью о том, как работает левитирующий волчок.
Магнитная левитация на постоянных магнитах: идеи и опыты
Самый простой и наглядный пример магнитной левитации, которая создается на постоянных магнитах – это так называемый левитрон. Эту игрушку придумал американский изобретатель почти 30 лет назад. В основе конструкции всего два кольцевых магнита. Большой лежит строго горизонтально, а маленький вращается и зависает над ним. Что же его удерживает от падения? За счет чего достигается такой эффект? Игорь Белецкий высказывает на видео идеи практической реализации левитрона и проводит опыты.
Решающим фактором для стабильной левитации является вращение самого волчка, вследствие чего возникает в гироскопический эффект, благодаря нему волчок не опрокидывается, хотя постоянно к этому стремится, и как только трение а воздух притормозит его вращение, сила магнитного притяжения возьмет верх.
Было бы заманчиво найти практическое применение такому подвесу. Например, сделать бесконтактный маховик – накопителя энергии. Но беда в том, что что по схеме левитрона, когда большой магнит удерживает маленький, не получается подвесить массивное тело. Сила отталкивания крайне мала – жалкие 30 грамм. Это предел. Нагрузишь больше и система сложится, а увеличивать габариты магнита непрактично и дорого. Но как же так? Неодимовые магниты обладают просто чудовищной силой отталкивания, и это действительно так.
Продаются магниты дешевле в этом китайском магазине.
Автор видео Игорь Белецкий попытался реализовать динамическую левитацию по принципу магнитного подвеса, расположив ось вращения вертикально.Вес маховика легко компенсируется двумя маленькими кольцевыми магнитами, а вот осевую стабилизацию должны были обеспечить небольшие магниты на концах оси. Плюс гироскопический эффект от вращения самого маховика. К сожалению, проведя множество экспериментов, он так и не добился желаемого. Возможно, он снова выбрал не самую удачную схему, потому что, чем больше в системе магнитов, а значит и напряжений, тем сложнее ее уравновесить.
Самый простой и дешевый способ магнитного подвеса предложил еще профессор механики Нурбей Гулия. Он просто перенес всю массу маховика на кольцевые магниты, а осевую стабилизацию оставил за обычными подшипниками, что вполне логично, ведь при вертикальной оси вращения нагрузка на них минимальная, как и потери на трение. Это, конечно, не чистая левитация, но что то весьма близкое. Автор ролика быстро собрал похожую конструкцию и убедился в ее практичности. Вместо подшипников для стабилизации оси он использовал графитовые втулки. Трение у них действительно минимально. Теперь бы еще поместить всё в безвоздушную капсулу и получится настоящий накопитель механической энергии. А потом, для полного счастья, было бы логично сделать бесконтактный отбор мощности. Самый простой способ – превратить маховик в магнитный ротор. Например, добавим катушку индуктивности и получим генератор, который при необходимости сможет работать и как электромотор для раскрутки маховика накопителя. Но это уже совсем другая история.
Квантовая левитация (эффект Мейснера): научное объяснение
Левитация – это преодоление силы тяжести, при которой субъект или объект находится в пространстве без опоры. Слово «левитация» происходит от латинского Levitas, что означает «легкость».
Левитацию неправильно приравнивать к полету, потому что последний основан на сопротивлении воздуха, именно поэтому птицы, насекомые и другие животные летают, а не левитируют.
Левитация в физике
Левитация в физике относится к устойчивому положению тела в гравитационном поле, при этом тело не должно касаться других объектов. Левитация подразумевает некоторые необходимые и труднодостижимые условия:
- Сила, которая способна компенсировать гравитационное притяжение и силу тяжести.
- Сила, которая способна обеспечить устойчивость тела в пространстве.
Из закона Гаусса следует, что в статическом магнитном поле статические тела или объекты не способны к левитации. Однако если сменить условия, то можно достичь левитации.
Квантовая левитация
Широкой публике о квантовой левитации впервые стало известно в марте 1991 года, когда в научном журнале Nature было опубликовано интересное фото. На нем директор Токийской исследовательской лаборатории по сверхпроводимости Дон Тапскотт стоял на керамической сверхпроводящей пластине, а между полом и пластиной не было ничего. Фотография оказалась настоящей, а пластина, которая вместе со стоящим на ней директором весила около 120 килограммов, могла левитировать над полом благодаря эффекту сверхпроводимости, известному как эффект Мейснера-Оксенфельда.
Диамагнитная левитация

Так называют тип пребывания в подвешенном состоянии в магнитном поле тела, содержащего воду, которая сама по себе является диамагнетиком, то есть материалом, атомы которого способны намагничиваться против направления основного электромагнитного поля.
В процессе диамагнитной левитации основную роль играют диамагнитные свойства проводников, атомы которых под действием внешнего магнитного поля слегка изменяют параметры движения электронов в их молекулах, что приводит к появлению слабого магнитного поля, противоположного по направлению основному. Эффекта этого слабого электромагнитного поля достаточно, чтобы преодолеть силу тяжести.
Чтобы продемонстрировать диамагнитную левитацию, ученые многократно проводили опыты на небольших животных.
Этот вид левитации использовался в экспериментах на живых объектах. Во время опытов во внешнем магнитном поле с индукцией около 17 Тесла было достигнуто подвешенное состояние (левитация) лягушек и мышей.
По третьему закону Ньютона, свойства диамагнетиков можно использовать и наоборот, то есть для левитации магнита в поле диамагнетика или для его стабилизации в электромагнитном поле.
Диамагнитная левитация по своей природе идентична квантовой левитации. То есть как и при воздействии эффекта Мейснера, происходит абсолютное вытеснение из материала проводника магнитного поля. Небольшим отличием является лишь то, что для достижения диамагнитной левитации необходимо значительно более сильное электромагнитное поле, однако при этом совершенно не нужно охлаждать проводники, чтобы добиться их сверхпроводимости, как в случае с квантовой левитацией.
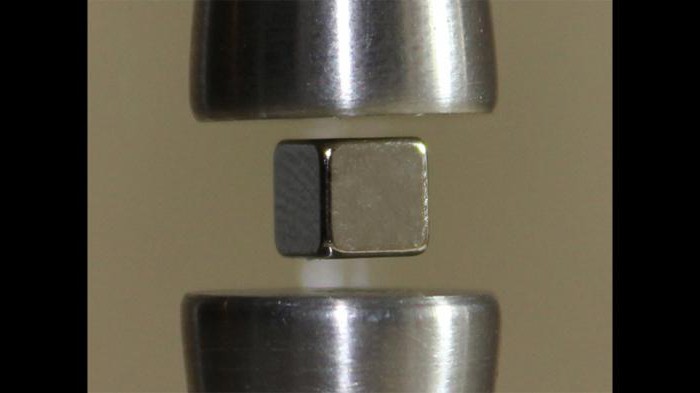
В домашних условиях можно даже поставить несколько опытов по диамагнитной левитации, например, при наличии двух пластин висмута (который является диамагнетиком) можно установить в подвешенное состояние магнит с невысокой индукцией, около 1 Тл. Кроме того, в электромагнитном поле с индукцией в 11 Тесла можно стабилизировать в подвешенном состоянии небольшой магнит, регулируя его положение пальцами, при этом совершенно не касаясь магнита.
Часто встречающимися диамагнетиками являются практически все инертные газы, фосфор, азот, кремний, водород, серебро, золото, медь и цинк. Даже человеческое тело является диамагнетиком в правильном электромагнитном магнитном поле.
Магнитная левитация
Магнитная левитация – это эффективный метод поднятия объекта с использованием магнитного поля. В этом случае магнитное давление используется для компенсации силы тяжести и свободного падения.
Согласно теореме Ирншоу, нельзя удерживать объект в гравитационном поле устойчиво. То есть левитация при таких условиях невозможна, однако если принять во внимание механизмы действия диамагнетиков, вихревых токов и сверхпроводников, то можно достичь эффективной левитации.
Если магнитная левитация обеспечивает подъемную силу при механической поддержке, такое явление принято называть псевдолевитацией.
Эффект Мейснера

Эффект Мейснера – это процесс абсолютного вытеснения магнитного поля из всего объема проводника. Обычно это происходит в процессе перехода проводника в сверхпроводящее состояние. Именно этим сверхпроводники отличаются от идеальных – при том, что у обоих сопротивление отсутствует, магнитная индукция идеальных проводников остается неизменной.
Впервые это явление наблюдали и описали в 1933 году двое немецких физиков – Мейснер и Оксенфельд. Именно поэтому иногда квантовую левитацию называют эффектом Мейснера-Оксенфельда.
Из общих законов электромагнитного поля следует, что при отсутствии в объеме проводника магнитного поля в нем присутствует только поверхностный ток, который занимает пространство у поверхности сверхпроводника. При этих условиях сверхпроводник ведет себя так же, как и диамагнетик, при этом таковым не являясь.
Эффект Мейснера разделяют на полный и частичный, в зависимости от качества сверхпроводников. Полный эффект Мейснера наблюдается, когда магнитное поле вытесняется полностью.
Высокотемпературные сверхпроводники
В природе мало чистых сверхпроводников. Большинство их материалов, обладающих свойствами сверхпроводимости, являются сплавами, у которых чаще всего наблюдается лишь частичный эффект Мейснера.
В сверхпроводниках именно способность полностью вытеснять магнитное поле из своего объема разделяет материалы на сверхпроводники первого и второго типов. Сверхпроводниками первого типа являются чистые вещества, например, ртуть, свинец и олово, способные даже при высоких магнитных полях продемонстрировать полный эффект Мейснера. Сверхпроводники второго типа – чаще всего сплавы, а также керамика или некоторые органические соединения, которые в условиях магнитного поля с высокой индукцией способны лишь на частичное вытеснение магнитного поля из своего объема. Тем не менее в условиях очень малой индукции магнитного поля практически все сверхпроводники, в том числе и второго типа, способны на полный эффект Мейснера.
Известно несколько сотен сплавов, соединений и несколько чистых материалов, обладающих характеристиками квантовой сверхпроводимости.
Опыт «Гроб Магомета»

«Гроб Магомета» – это своеобразный фокус с левитацией. Так называли опыт, наглядно демонстрирующий эффект.
Согласно мусульманской легенде, гроб пророка Магомеда находился в воздухе в подвешенном состоянии, без какой-либо опоры и поддержки. Именно поэтому у опыта такое название.
Научное объяснение опыта
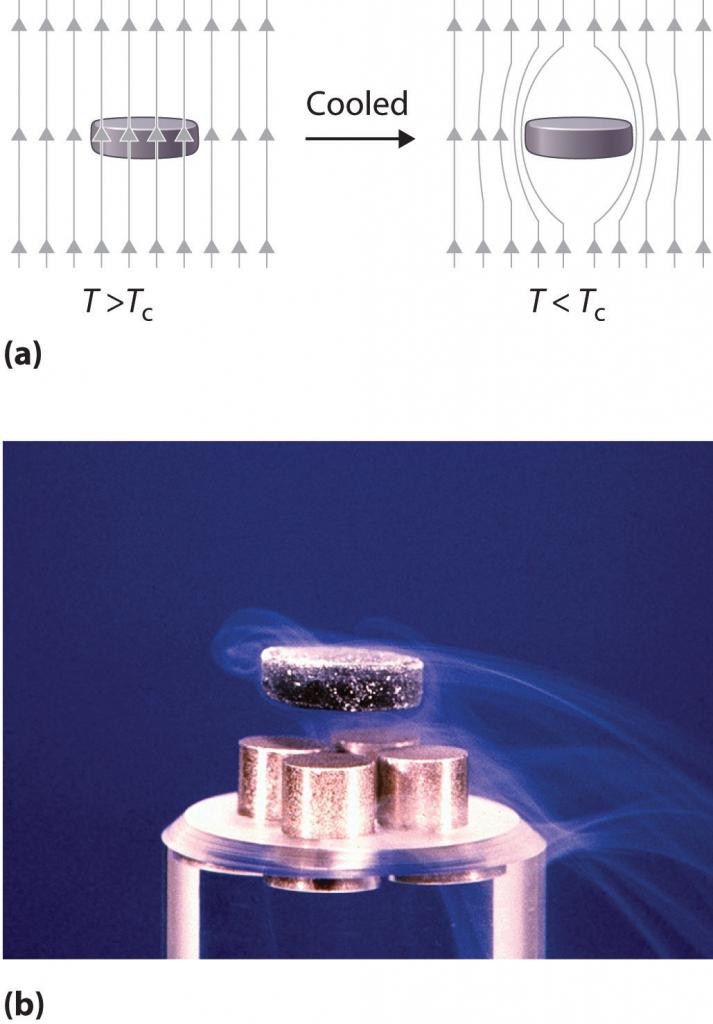
Сверхпроводимость может быть достигнута лишь при очень низких температурах, поэтому сверхпроводник необходимо заранее охладить, например, при помощи высокотемпературных газов, таких как жидкий гелий или жидкий азот.
Затем на поверхность плоского охлажденного сверхпроводника помещают магнит. Даже в полях с минимальной магнитной индукцией, не превышающей 0,001 Тесла, магнит поднимается вверх над поверхностью сверхпроводника примерно на 7-8 миллиметров. Если постепенно увеличивать индукцию магнитного поля, расстояние между поверхностью сверхпроводника и магнитом будет увеличиваться все больше и больше.
Магнит буде продолжать левитировать до того момента, пока внешние условия не изменятся и сверхпроводник не потеряет свои сверхпроводящие характеристики.
Вязкое сопротивление жидкости заставило магнитную «блоху» левитировать
K. Baldwin et al. / Phys. Rev. Lett.
Физики из Германии и Британии открыли новый эффект в магнитных мешалках — оказывается, перемешивающая жидкость «блоха» левитирует в жидкости, если ее вязкость превышает определенное значение. Ученые не только экспериментально определили вязкость, частоту вращения и высоту стакана, при которой «блоха» начинает левитировать, но и объяснили наблюдаемое явление теоретически. Статья опубликована в Physical Review Letters, кратко о ней сообщает Physics, препринт работы выложен на сайте arXiv.org.
Магнитная мешалка была изобретена в 1942 году и с тех пор ее конструкция практически не изменилась. В самой простой форме это устройство состоит из двух цилиндрических постоянных магнитов, находящихся в параллельных плоскостях и ориентированных так, чтобы южный полюс одного из магнитов совпадал с северным полюсом второго магнита (и наоборот). Нижний магнит располагается под дном стеклянного стакана, а верхний помещается в налитую в стакан жидкость; когда нижний магнит вращается под действием электромотора, верхний магнит также раскручивается и перемешивает жидкость. Если раскрутить мешалку слишком быстро, верхний магнит начинает хаотично двигаться и подпрыгивать — поэтому его обычно называют «блохой» («flea») или «якорем». Благодаря своему удобству магнитные мешалки широко используются в биологии и химии — в интернете такую мешалку можно купить всего за 100–200 долларов.
Тем не менее, даже такие простые и, казалось бы, хорошо изученные устройства могут иногда повести себя совершенно неожиданно. Пример такого неожиданного поведения открыла и изучила группа ученых под руководством Дэвида Фэрхерста (David Fairhurst) — однажды, смешивая в магнитной мешалке полимер и воду, Фэрхерст заметил, что «блоха» левитирует в центре стакана вместо того, чтобы вращаться около его дна. Затем физики изучили это случайное открытие более пристально — наливали в стакан жидкости с различной вязкостью, приподнимали его над нижним магнитом и увеличивали скорость вращения — а потом построили численную модель и объяснили наблюдаемые процессы теоретически.
Схема «магнитной мешалки», которую ученые использовали в эксперименте
K. Baldwin et al. / Phys. Rev. Lett.
В результате ученые обнаружили, что поведение мешалки описывается одним из трех сценариев. Во-первых, если вязкость жидкости сравнительно невелика (η < 0,4 паскалей на секунду) — например, если в стакан налита вода, — то «блоха» хаотически движется и прыгает, как в классических экспериментах, в честь которых она получила свое название. Во-вторых, в более вязких жидкостях (η > 0,4 паскалей на секунду) «блоха» теряет энергию из-за трения и отстает от нижнего магнита, то есть скорость ее вращения ωs оказывается ниже скорости вращения электромотора ωd; при этом на периодическое вращение накладываются «подрагивания» с частотой ωw. Если точнее, угол поворота «блохи» подчиняется эмпирическому закону θ = ωst + Asin(ωwt), где A — амплитуда «подрагиваний». При увеличении частоты ωd частота вращения «блохи» и амплитуда «подрагиваний» уменьшается, а частота ωw растет (более точная зависимость приведена на графике). Наконец, если стакан с вязкой жидкостью (η > 0,4 паскалей на секунду) пододвинуть к нижнему магниту на расстояние z < 4 сантиметров, «блоха» останется подвешенной в толще жидкости вместо того, чтобы упасть на дно стакана. Правда, для этого скорость вращения электромотора не должна опускаться ниже 63 радиан в секунду — иначе частота «подрагиваний» сравнивается с основной частотой вращения «блохи», и она падает на дно стакана.
Зависимость частоты вращения «блохи» (круги), частоты «подрагиваний» (треугольники) и амплитуды «подрагиваний» (квадраты) от частоты вращения электромотора
K. Baldwin et al. / Phys. Rev. Lett.
Чтобы объяснить левитацию «блохи», ученые построили простую теоретическую модель, которая описывает вертикальные силы, действующие на цилиндр. Эта модель показывает, что основная причина, по которой «блоха» остается подвешенной в жидкости — отставание ее вращения от вращения нижнего магнита, из-за которого одноименные полюса магнитов время от времени оказываются друг над другом. Рассчитанные с помощью этой модели положения «блохи» совпадают с результатами эксперимента, что указывает на ее правдоподобность.
Зависимость средней высоты «блохи» от частоты вращения электромотора: серые точки отвечают случаю неконтролируемого «выскакивания», пустые точки — случаю вращения на дне, цветные точки — левитации. Сплошная черная линия — теоретически рассчитанная зависимость высоты левитирующей «блохи»
K. Baldwin et al. / Phys. Rev. Lett.
Тем не менее, модель также предсказывает, что «блоха» будет дестабилизироваться и выскакивать из положения равновесия из-за колебаний в горизонтальной плоскости. Чтобы объяснить, почему такая дестабилизация не происходит, физики численно смоделировали поведение жидкости, обтекающей вращающийся цилиндр. Оказалось, что «блоха» удерживается около оси стакана благодаря «подрагиваниям», которые на первый взгляд казались побочным эффектом, — они «откачивают» вязкую жидкость из центра цилиндра и создают центростремительную силу, которая стабилизирует его вращение. Напротив, в менее вязких жидкостях потоки направлены к цилиндру — это выводит «блоху» из равновесия и заставляет ее выскакивать из положения равновесия.
Численно рассчитанные направления потоков воды вокруг «блохи», которые вызываются «искусственными подрагиваниями» ее концов в плоскости, перпендикулярной плоскости рисунка
K. Baldwin et al. / Phys. Rev. Lett.
Численно рассчитанные направления потоков воды вокруг «блохи» для различных чисел Рейнольдса
K. Baldwin et al. / Phys. Rev. Lett.
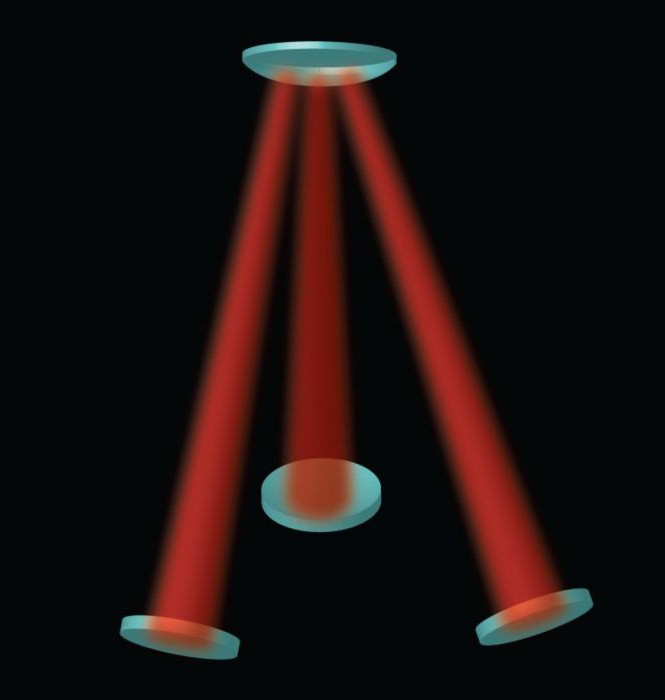
Теорема Ирншоу утверждает, что подвесить намагниченные частицы в статическом магнитном поле, не прибегая к внешним силам, невозможно. Именно поэтому авторам статьи пришлось закручивать частицы и стабилизировать их с помощью силы вязкости. Тем не менее, магнитная левитация — это не единственный способ заставить объекты парить в воздухе; в частности, в последнее время физики и инженеры активно разрабатывают акустические левитаторы, которые удерживают небольшие объекты с помощью звуковых волн. Так, в 2015 году исследователям впервые удалось подвесить с помощью направленного луча пластмассовый шарик диаметром около четырех миллиметров, в 2016 году они увеличили диаметр шарика до пяти сантиметров, а в 2018 году научились передвигать его в пространстве. Более того, акустические левитаторы уже находят практические применения — с их помощью можно переносить еду по воздуху, спаивать детали микросхем и создавать объемные изображения, напоминающие «голограммы» из «Звездных войн» или других научно-фантастических фильмов.
Дмитрий Трунин
Левитация магнитная: описание, особенности и примеры
Как известно, у Земли, в силу сложившегося миропорядка, существует определенное гравитационное поле, а мечтой человека всегда было преодоление его любыми способами. Левитация магнитная – термин скорее фантастический, чем относящийся к повседневной реальности.
Изначально под ним подразумевалась гипотетическая способность неведомым образом преодолевать земное притяжение и перемещать людей или предметы по воздуху без вспомогательного оборудования. Однако сейчас понятие «магнитная левитация» является уже вполне научным.
Разрабатывается сразу несколько инновационных идей, в основе которых лежит данное явление. И все они в перспективе обещают великолепные возможности для разностороннего применения. Правда, осуществляться левитация магнитная будет не магическими приемами, а с использованием вполне конкретных достижений физики, а именно раздела, изучающего магнитные поля и все, что с ними связано.

Совсем немного теории
Среди людей, далеких от науки, бытует мнение, что магнитная левитация представляет собой направляемый полет магнита. На деле под этим термином подразумевается преодоление предметом гравитации при помощи магнитного поля. Одной из его характеристик является магнитное давление, оно-то и используется для «борьбы» с земным притяжением.
Проще говоря, когда гравитация притягивает объект вниз, магнитное давление направляется таким образом, чтобы оно отталкивало его в обратном направлении – вверх. Так возникает левитация магнита. Затруднение реализации теории в том, что статическое поле нестабильно и не фокусируется в заданной точке, так что эффективно противостоять притяжению может не вполне. Поэтому требуются вспомогательные элементы, которые придадут магнитному полю динамическую устойчивость, чтоб левитация магнита была явлением регулярным. В качестве стабилизаторов для него используются разные приемы. Чаще всего – электроток через сверхпроводники, но есть и другие наработки в данной области.
Техническая левитация
Собственно, магнитная разновидность относится к более обширному термину преодоления гравитационного притяжения. Итак, техническая левитация: обзор методов (очень краткий).
С магнитной технологией мы вроде бы немного разобрались, но существуют еще электрический метод. В отличие от первого, второй может быть использован для манипуляций с изделиями из разнообразных материалов (в первом случае – только намагниченных), даже диэлектриков. Разделяется также электростатическая и электродинамическая левитация.
Возможность частиц под воздействием света осуществлять движение была предугадана еще Кеплером. А существование давления света доказано Лебедевым. Движение частицы в направлении источника света (оптическая левитация) именуется положительным фотофорезом, а в обратном направлении – отрицательным.
Левитация аэродинамическая, отличаясь от оптической довольно широко применима в технологиях дня нынешнего. Кстати, «подушка» — один из ее разновидностей. Простейшая воздушная подушка получается очень легко — в подложке-носителе сверлятся множество отверстий и через них продувается сжатый воздух. При этом воздушная подъемная сила уравновешивает массу предмета, и тот парит в воздухе.
Последний известный науке на данный момент способ – левитация с использованием акустических волн.

Какие есть примеры магнитной левитации?
Фантасты мечтали о портативных аппаратах размером с рюкзак, которые могли бы «левитировать» человека в нужном ему направлении со значительной скоростью. Наука пока пошла по другому пути, более практичному и осуществимому – был создан поезд, перемещающийся с помощью магнитной левитации.
История суперпоездов
Впервые идею состава, использующего линейный двигатель, подал (и даже запатентовал) немецкий инженер-изобретатель Альфред Зейн. И было это в 1902 году. После этого разработки электромагнитного подвеса и поезда, оснащенного им, появлялись с завидной регулярностью: в 1906 г. Франклин Скотт Смит предложил еще один прототип, между 1937 и 1941 гг. ряд патентов по этой же теме получил Герман Кемпер, а чуть позже британец Эрик Лэйзвейт создал работающий прототип двигателя в натуральную величину. В 60-х он же участвовал в разработке Tracked Hovercraft, который должен был стать самым скоростным поездом, но так и не стал, поскольку из-за недостаточного финансирования в 1973-м проект был закрыт.
Только шесть лет спустя, причем снова в Германии, был построен поезд на магнитной подушке, получивший лицензию на пассажирские перевозки. Испытательный трек, проложенный в Гамбурге, имел длину меньше километра, но сама идея так вдохновила общество, что поезд функционировал и после закрытия выставки, успев за три месяца перевезти 50 тысяч людей. Скорость его, по современным меркам, была не так уж велика – всего 75 км/ч.
Не выставочный, а коммерческий маглев (так нарекли поезд, использующий магнит), курсировал между аэропортом Бирмингема и железнодорожной станцией с 1984 г., и продержался на своем посту 11 лет. Длина пути была еще меньше, всего 600 м, а над полотном поезд поднимался на 1,5 см.

Японский вариант
В дальнейшем ажиотаж по поводу поездов на магнитной подушке в Европе поутих. Зато к концу 90-х ими активно заинтересовалась такая страна высоких технологий как Япония. На ее территории уже проложены несколько довольно протяженных трасс, по которым летают маглевы, использующие такое явление как левитация магнитная. Этой же стране принадлежат и скоростные рекорды, поставленные данными поездами. Последний из них показал скоростной режим более 550 км/ч.
Дальнейшие перспективы использования
С одной стороны, маглевы привлекательны своими возможностями быстрого перемещения: по расчетам теоретиков, их можно будет в ближайшем будущем разогнать вплоть до 1 000 километров в час. Ведь их приводит в действие левитация магнитная, а тормозит только сопротивление воздуха. Поэтому придание максимально аэродинамических абрисов составу сильно снижает и его воздействие. К тому же, из-за того, что рельсов они не касаются, износ у таких поездов крайне медленный, что экономически весьма выгодно.
Еще один плюс – снижение шумового эффекта: маглевы передвигаются почти бесшумно по сравнению с обычными поездами. Бонусом также идет использование в них электроэнергии, что позволяет снизить вредное воздействие на природу и атмосферу. Кроме того, поезд на магнитной подушке способен преодолевать более крутые склоны, а это исключает необходимость прокладки железнодорожного полотна в обход холмов и спусков.
Применение в энергетике
Не менее интересным практическим направлением можно считать широкое применение магнитных подшипников в ключевых узлах механизмов. Их установка решает серьезную проблему износа исходного материала.
Как известно, классические подшипники истираются довольно быстро – они постоянно испытывают высокие механические нагрузки. В некоторых областях необходимость замены этих деталей обозначает не только дополнительные расходы, но и высокий риск для людей, которые обслуживают механизм. Магнитные подшипники сохраняют работоспособность во много раз дольше, так что их применение весьма целесообразно для любых экстремальных условий. В частности, в атомной энергетике, ветровых технологиях либо отраслях, сопровождаемых чрезвычайно низкими/высокими температурами.

Летательные аппараты
В проблеме, как осуществить магнитную левитацию, напрашивается резонный вопрос: когда же, наконец, будет изготовлен и представлен прогрессивному человечеству полноценный летательный аппарат, в котором будет использована левитация магнитная? Ведь косвенные свидетельства, что подобные «НЛО» существовали, имеются. Взять, к примеру, индийские «виманы» древнейшей эпохи или уже более близкие к нам во временном соотношении гитлеровские «дисколеты», использующие, в том числе и электромагнитные способы организации подъемной силы. Сохранились примерные чертежи и даже фото действующих моделей. Вопрос остается открытым: как воплотить все эти идеи в жизнь? Но дальше не слишком жизнеспособных опытных образцов у современных изобретателей дело пока не идет. А может, это еще слишком секретная информация?