


Драйвер двигателей на L298N | AmperMarket.kz
// подключите пины контроллера к цифровым пинам Arduino
// первый двигатель
int enA = 9;
int in1 = 7;
int in2 = 6;
// второй двигатель
int enB = 3;
int in3 = 5;
int in4 = 4;
void setup()
{
// инициализируем все пины для управления двигателями как outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
// эта функция обеспечит вращение двигателей в двух направлениях на установленной скорости
void demoOne()
{
// запуск двигателя A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// устанавливаем скорость 100 из доступного диапазона 0~255
analogWrite(enA, 100);
// запуск двигателя B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// устанавливаем скорость 100 из доступного диапазона 0~255
analogWrite(enB, 100);
delay(2000);
// меняем направление вращения двигателей
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(2000);
// выключаем двигатели
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
// эта функция обеспечивает работу двигателей во всем диапазоне возможных скоростей
void demoTwo()
{
// обратите внимание, что максимальная скорость определяется самим двигателем и напряжением питания
// ШИМ-значения генерируются функцией analogWrite()
// и зависят от вашей платы управления
// запускаем двигатели
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// ускорение от нуля до максимального значения
for (int i = 0; i = 0; —i)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// теперь отключаем моторы
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop()
{
demoOne();
delay(1000);
demoTwo();
delay(1000);
}
Новое.
 Микроконтроллеры на интернет-аукционе Au.ru
Микроконтроллеры на интернет-аукционе Au.ruВнимание!
Через сервис «Безопасная сделка» товар не отправляю!
L298N является двухканальным драйвером двигателей. Для его работы обязательно необходима обвязка из восьми диодов, которая уже установлена на данном модуле. Так что всё, что потребуется для управления моторами — это подать питание и подключить 4 либо 6 управляющих выводов (в зависимости от желаемого режима работы) к контроллеру. С помощью Arduino и данной платы можно управлять двумя DC моторами либо одним шаговым двигателем с рабочим напряжением от 5 до 35 Вольт и током до 2A.
Характеристики:
- Напряжение питания микросхемы: 5В
- Напряжение питания моторов: 5В — 35В
- Потребляемый ток микросхемы: 36мА
- Количество каналов: 2
- Максимальный ток на канал: 2А
- Максимальная рассеиваемая мощность: 25Вт
Характеристики драйвера моторов на микросхеме L298N:
— Микросхема драйвера: L298N (с радиатором охлаждения)
— Возможность питания внешней логики (Vss): +5V ~ +7V (внутренний стабилизатор +5В)
— Входное напряжение логической части (Vd): от 6V до 12V
— Входное напряжение управляемой части (Vs): от +5V до +35V
— Рабочий ток внешней логической части (Iss): 0 ~ 36mA
— Ток нагрузки каждой управляемой части (Io): 2A
— Пиковый ток нагрузки каждой управляемой части (Io): 3А
— Максимальная потребляемая мощность: 20Вт (при температуре = 75°C)
— Высокий уровень входного управляющего сигнала (High): 2. 3В = Vin = Vss
3В = Vin = Vss
— Низкий уровень входного управляющего сигнала (Low): -0.3В = Vin = 1.5В
— Рабочая температура окружающей среды: от -25 до +130°C
— Размеры модуля со стойками крепления и радиатором L298: 53 x 47 x 27 мм
Для подключения моторов постоянного тока (DC-моторов) служат порты:
OUT1 и OUT2 — мотор A
OUT3 и OUT4 – мотор B
(управление электромоторами полностью независимо друг от друга)
При подаче питания от +6V до +12V и одетом джампере JP1, питание подается и на стабилизатор, который выдает +5V для питания логики дайвера. Подавать отдельно питание +5V для логики не нужно.
При подаче питания выше +12V, джампер JP1 должен быть снят. Питание на логику подается отдельно через клемму «+5V».
Использует чип ST L298N, может напрямую управлять двумя двигателями от постоянного тока 3-30В, а также обеспечить интерфейс выхода 5В, питание 5В для однокристальных схем, поддержку управления 3.3В MCU — Можно легко управлять скоростью двигателя постоянного током и направлением, а также контролировать 2-фазный шаговый двигатель
Комплектация:
1 x Модуль драйвера двигателей L298N
Ардуино и микросхемы | L298N Драйвер шагового двигателя Ардуино
Модуль драйвера двигателей собран на микросхеме «L298N» от производителя «STMicroelectronis». Купить отдельно данну микросхему можно в нашем магазине (код товара: 12185). К данному модулю можно подключить два DC-двигателя с нагрузкой до 2 ампер или один двигатель с нагрузкой до 4 ампер. Питание логики подключается к разъему «5V», а питание двигателей а разъему «Vss» (дополнительный источник питания). Управление двигателями (например скоростью, остановкой, временем) происходит через разъемы «IN1» и «IN3» (первым и вторым двигателем). За направление движения отвечают разъемы «IN2» и «IN4» (первым и вторым двигателем). Если проще — то можно задать направление вращения двигателя через разъемы
Купить отдельно данну микросхему можно в нашем магазине (код товара: 12185). К данному модулю можно подключить два DC-двигателя с нагрузкой до 2 ампер или один двигатель с нагрузкой до 4 ампер. Питание логики подключается к разъему «5V», а питание двигателей а разъему «Vss» (дополнительный источник питания). Управление двигателями (например скоростью, остановкой, временем) происходит через разъемы «IN1» и «IN3» (первым и вторым двигателем). За направление движения отвечают разъемы «IN2» и «IN4» (первым и вторым двигателем). Если проще — то можно задать направление вращения двигателя через разъемы
Алгоритм работы модуля через разъемы «IN1» и «IN3» и «IN2» и «IN4» следующий:
«IN1» и «IN3» «IN2» и «IN4» Результат
0 0 Движения нет.
0 1 Вращение по часовой стрелке
1 0 Вращение против часовой стрелки
1 1 Движения нет.
PWM 1 Движение по стрелке с регулировкой скорости
PWM 0 Движение против стрелки с регулировкой скорости
Скачать библиотеку для подключения двигателей можно с сайта Ардуино
L298n Схема Подключения — tokzamer.ru
В данной же статье мы рассмотрим драйвер двигателей базе микросхемы LN собранный на платке в виде модуля.
Могут использоваться в двух режимах: 1.
Так как транзисторы в схеме моста имеют разный тип проводимости, то при таком входном сигнале транзисторы Т1 и Т4 останутся в закрытом состоянии, в то время, как через транзисторы Т2 и Т3 потечёт ток. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию.
В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию.
Такой вариант позволяет управлять скоростью вращения вала и его направлением у двигателя постоянного тока. Если напряжение больше 12 вольт, разомкните контакты на 3 коннекторе.
Подача логической единицы на эти контакты разрешает вращение двигателей, а логический ноль — запрещает.
Можно подключить к ШИМ-выходу для управления скоростью двигателя постоянного тока. В рамках данной теми рассмотрим также подключение драйвера LN к плате Arduino.
Теперь испробуем простую программу, написанную на Python, которая поможет понять принцип управления электродвигателем постоянного тока.
В таком случае на разъём подаётся только питание для двигателей Vss , контакт Vs остаётся не подключенным, а на плате устанавливается перемычка питания от стабилизатора, который ограничит питающее моторы напряжение до приемлемых 5V.

Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
Микросхема L298N
Motor Shield разработан на базе микросхемы LN. Их необходимо устанавливать в обвязку микросхемы дополнительно.
Разъём для подачи питания и работа стабилизатора.
LOW Включаем вращение двигателя 1 в одну сторону.
Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль. Однако, связка «Ардуино — шаговый двигатель» требует дополнительный элемент — драйвер.
Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал.
Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал.
Аналогично первому скрипту, программу можно сохранить в тот же файл или в новый отдельно созданный.
Шаговый двигатель БЕЗ ДРАЙВЕРА!

Подключение модуля L298N
GND — земля. Зажимы, куда подключать моторы Следует отметить, что клеммный зажим с тремя выводами не только подводит к плате питающее напряжение, но и позволяет получить его уже преобразованное для собственных нужд драйвера величиной в 5В, как показано на рисунке выше.
Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. На схеме ниже приведен пример распределения выводов LN от рабочей микросхемы.
HIGH time. Мы использовали танковую платформу, учитывая что мотор крутит редуктор и гусеницы, то для его запуска требуется приличный ток.
В приведенном ниже скетче два мотора будут вращаться в обе стороны с плавным нарастанием скорости. Схема соединения Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками , где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке.
 В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Всё это приведёт к вращению мотора в определённом направлении. Блок клемм 3 отвечает за подключение питания двигателей.
В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Всё это приведёт к вращению мотора в определённом направлении. Блок клемм 3 отвечает за подключение питания двигателей.Подключение L298N к плате Arduino
Причем некоторые пины должны поддерживать ШИМ-модуляцию. При этом есть возможность изменять скорость и направление вращения моторов. В данном примере рассматривается мост собранный на полупроводниках.
Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Подключение биполярного шагового двигателя к модулю L для управления через Raspberry Pi.
HIGH ждем 5 секунд. Типы шаговых двигателей: биполярный, униполярный, с четырьмя обмотками.
L298N, Arduino и двигатель постоянного тока
Активный — доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
Максимально допустимый ток для одного канала платы составляет 2А. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию.
При напряжении питания свыше 12V, без опаски подвеем нужное напряжение на данный вывод, но не забываем снять джампер. Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Управление может быть реализовано в активном или пассивном режимах.
Подключение двигателя производится к винтовым клеммным зажимам — по паре для питания каждого моторчика. Активный режим. Потенциометр кОм.
В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов.
Позволяет управлять двумя моторами постоянного тока, либо одним шаговым двигателем.
Применяя схему Н-моста для управления работой двигателя постоянного тока, вы сможете реализовать полный набор операций для электрической машины без необходимости переподключения ее выводов. Если джампер одет, то реализуется логика «пассивного» управления. После этого подключите источник питания. Активный режим.
Важно чтобы в данном примере кода соблюдались отступы, об этом я уже писал раньше вот тут. Видео-демонстрация работы шагового двигателя: Заключение Надеюсь вы получили ответ на вопрос «что такое H-мост и как он работает», из экспериментов должно быть понятно как применять драйвер на микросхеме L и подключать к нему разные движки. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. LOW Выходим из редактора и сохраняем файл.
LOW Выходим из редактора и сохраняем файл.
Шаговый Двигатель Без Драйвера — Stepper Motor Run Without Driver
Каталог продукцииОбновлен: 01.09.2021 в 02:33
| Информация обновлена 01. 09.2021 в 02:33 09.2021 в 02:33
|
отзывы, фото и характеристики на Aredi.ru
Мы доставляем посылки в г. Калининград и отправляем по всей России
- 1
Товар доставляется от продавца до нашего склада в Польше.
 Трекинг-номер не
предоставляется.
Трекинг-номер не
предоставляется. - 2
После того как товар пришел к нам на склад, мы организовываем доставку в г. Калининград.
- 3
Заказ отправляется курьерской службой EMS или Почтой России. Уведомление с трек-номером вы получите по смс и на электронный адрес.
 Трекинг-номер не
предоставляется.
Трекинг-номер не
предоставляется.!
Ориентировочную стоимость доставки по России менеджер выставит после оформления заказа.
Гарантии и возврат
Гарантии
Мы работаем по договору оферты, который является юридической гарантией того, что мы выполним
свои обязательства.
Возврат товара
Если товар не подошел вам, или не соответсвует описанию, вы можете вернуть его, оплатив
стоимость обратной пересылки.
- У вас остаются все квитанции об оплате, которые являются подтверждением заключения сделки.
- Мы выкупаем товар только с проверенных сайтов и у проверенных продавцов, которые полностью отвечают за доставку товара.
- Мы даем реальные трекинг-номера пересылки товара по России и предоставляем все необходимые документы по запросу.
- 5 лет успешной работы и тысячи довольных клиентов.
Модуль RA045 «Контроллер двигателей постоянного тока или шагового двигателя на базе L298N»
Радиоконструктор выгодно отличается от аналогичных модулей тем, что на плате контроллера установлены дополнительно разъемы для удобного подключения датчиков и сервоприводов использующих интерфейс Grove.
Краткое описание.
Модуль собран на печатной плате, с одной стороны которой установлены активные элементы, микросхема L298N на теплоотводе и интерфейсные разъемы, а с другой стороны pin-разъемы для удобного монтажа на плату Arduino. Использование микросхемы L298N позволяет управлять 2 двигателями постоянного тока или одним четыехпроводным шаговым двигателем. В варианте 2 двигателей постоянного тока нагрузочная способность 2 А на канал, при использовании одного шагового -4А. По периметру платы расположены разъемы для подключения питания, моторов устройств, использующих Grove –интерфейс, а также интерфейсы UART и IIC
1. Разъем подключение двигателей – подключение 2 двигателей постоянного тока либо 1 шаговый двигатель с четырехпроводным управлением;
2. Джампер включения двигателя А и В – перемычка установлена, работают оба двигателя постоянного тока или один шаговый двигатель;
3. Разъемы подключения сервоприводов и устройств с интерфейсом Grove – цифровые выходы ШИМ (PWM) D1-D7
4. Разъем внешнего питания – напряжение питания электродвигателей от 6 до 15 В. При установленой перемычке J4 «Переключатель режима питания» логика модуля будет запитываться от внешнего питания через встроенный источник +5В (микросхема U5).
Разъем внешнего питания – напряжение питания электродвигателей от 6 до 15 В. При установленой перемычке J4 «Переключатель режима питания» логика модуля будет запитываться от внешнего питания через встроенный источник +5В (микросхема U5).
5. Джампер J4-переключатель режима питания – при установленной перемычке логика микросхемы
L298N работает от внешнего источника питания двигателей, если перемычка удалена, то необходимо подвть напряжение +5В от платы Arduino.
6. LED индикаторы вращения двигателей –указывают направление вращения двигателей
7. Разъемы для подключения периферийных устройств с интерфейсом Grove.
8. Кнопка «Сброс»
На плате так же установлены разъемы для осуществления обмена и управления с использованием протокола UART («Serial Interface») и платы расширения шины по протоколу IIC («IIC Interface»).
Технические характеристики.
•Стандартный Arduino совместимый драйвер 2 двигателей постоянного тока, или 1 двухфазный 4-проводный шаговый двигатель
•Режим управления ШИМ
•Регулирование скорости прпорциональное, 8 бит
•Напряжение питания логики, В 5
•Ток потребления, mA 20-70
•Напряжение питания двигателей, В 6-15
•Максимальный ток, А2 на каждый из 2 каналов 4 суммарно, при одноканальном включении
•Максимальное количествопо дключаемых сервоприводов и устройств Grove14
•Размер модуля, мм 65 х 55
L298N Схема расположения выводов модуля драйвера двигателя, техническое описание, характеристики и характеристики
Этот модуль драйвера двигателя L298N представляет собой модуль драйвера двигателя высокой мощности для управления двигателями постоянного тока и шаговыми двигателями. Этот модуль состоит из микросхемы драйвера двигателя L298 и регулятора 5V 78M05. L298N Модуль может управлять 4 двигателями постоянного тока или 2 двигателями постоянного тока с контролем направления и скорости.
Этот модуль состоит из микросхемы драйвера двигателя L298 и регулятора 5V 78M05. L298N Модуль может управлять 4 двигателями постоянного тока или 2 двигателями постоянного тока с контролем направления и скорости.
Имя контакта | Описание |
IN1 и IN2 | Входные контакты двигателя А.Используется для управления направлением вращения двигателя A |
IN3 и IN4 | Входные контакты двигателя B. Используется для управления направлением вращения двигателя B |
ENA | Включает сигнал ШИМ для двигателя A |
ENB | Включает сигнал ШИМ для двигателя B |
OUT1 и OUT2 | Выходные контакты двигателя A |
OUT3 и OUT4 | Выходные контакты двигателя B |
12В | Вход 12 В от источника постоянного тока |
5 В | Обеспечивает питание схемы коммутации внутри микросхемы L298N |
GND | Штырь заземления |
- Модель драйвера: L298N 2A
- Чип драйвера: двойной H-мост L298N
- Напряжение питания двигателя (максимальное): 46 В
- Ток питания двигателя (максимальный): 2A
- Логическое напряжение: 5 В
- Напряжение драйвера: 5-35 В
- Ток драйвера: 2A
- Логический ток: 0-36 мА
- Максимальная мощность (Вт): 25 Вт
- Чувствительность по току для каждого двигателя
- Радиатор для повышения производительности
- Светодиодный индикатор включения питания
Модули альтернативного драйвера: TMC2209, DRV8825, A4988, L9110S, DRV8711
Связанные компоненты: ИС драйвера двигателя LM298, регулятор напряжения 78M05, конденсаторы, резисторы, радиатор
Краткое описание модуля L298N Модуль драйвера двигателя L298N состоит из ИС драйвера двигателя L298, регулятора напряжения 78M05, резисторов, конденсатора, светодиода питания и перемычки 5 В на интегральной схеме.
78M05 Регулятор напряжения будет включен только при установке перемычки. Когда источник питания меньше или равен 12 В, тогда внутренняя схема будет питаться от регулятора напряжения, а вывод 5 В может использоваться в качестве выходного вывода для питания микроконтроллера. Перемычку нельзя устанавливать, когда напряжение питания превышает 12 В, а отдельные 5 В должны подаваться через клемму 5 В для питания внутренней схемы.
Контакты ENA и ENB — это контакты управления скоростью для двигателя A и двигателя B, в то время как IN1 и IN2 и IN3 и IN4 являются контактами управления направлением для двигателя A и двигателя B.
Внутренняя принципиальная схема модуля драйвера двигателя L298N приведена ниже:
Применение модуля L298N- Приводные двигатели постоянного тока.
- Приводные шаговые двигатели
- В робототехнике
L298, модуль драйвера двигателя с двойным Н-мостом
Вы когда-нибудь задумывались, как работают двигатели постоянного тока, реле и шаговые двигатели? Это все работы L298! Научиться управлять двигателями постоянного тока станет намного проще после того, как вы научитесь использовать L298.
Из этой статьи вы узнаете все о двойном H-мостовом драйвере L298. В этом блоге мы рассмотрим:
- Что такое двигатель постоянного тока?
- Что такое двойной H-мостовой драйвер L298?
- Характеристики L298
- Распиновка L298
- Драйвер двигателя L298n
- Как работает драйвер двигателя L298n?
- Применение драйвера двигателя L298n
- Управление двигателем постоянного тока с драйвером двигателя L298n и Arduino
- Сравнение с другими драйверами двигателя
Что такое двигатель постоянного тока?
Двигателипостоянного тока — это двигатели, которые работают от постоянного тока (DC).Двигатели постоянного тока доступны в нескольких различных конфигурациях от крошечных маленьких двигателей до абсолютно огромных. Двигатели постоянного тока могут использоваться в базовых роботах, квадрокоптерах, моделях самолетов и лодок.
Как работает двигатель постоянного тока?
Рабочий щеточный двигатель постоянного тока(Источник: Renesas)
- Двигатели постоянного тока состоят из катушек с проводом
- Катушки, подключенные к коммутатору
- Катушки окружены парой магнитов или статором
- Постоянный ток, приложенный к коммутатору
- Магнитное поле формируется в катушках
- Магнитное взаимодействие катушки с магнитами («статор»)
- Направление вращения можно изменить, изменив полярность на контактах двигателя
Для получения дополнительной информации, пожалуйста, обратитесь к блогу Хелен, Выбор Правильный двигатель для вашего проекта — DC против шаговых против серводвигателей.
Что такое двойной H-мостовой драйвер L298?
- L298 — это микросхема привода двигателя высокого напряжения и тока, которая принимает логические сигналы TTL.
- Они в основном используются, когда
- Это необходимо для работы с различными нагрузками, такими как двигатели, соленоид и т. Д., Где требуется H-образный мост.
- Требуется драйвер двигателя высокой мощности.
- Блок управления может обеспечивать только выходы TTL.
- Требуется одночиповое устройство управления током и управляемое ШИМ.
- Он имеет два входа включения, чтобы независимо включать или отключать конкретное устройство, подключенное к его выходу.
Таким образом, H-мост в основном используется для управления направлением вращения в двигателях постоянного тока.
Характеристики L298
Основные характеристики модуля L298n:
- Высокое рабочее напряжение — может достигать 46 В
- Большой выходной ток
- Мгновенный пиковый ток может достигать 3 А
- Непрерывный рабочий ток может достигать 2 А
- Номинальная мощность 25 Вт
- Полномостовой драйвер высокого напряжения и тока с 2 Н-мостами, используемыми для управления индуктивными нагрузками, такими как двигатели постоянного тока и шаговые двигатели.
- Управляется стандартными сигналами логического уровня
- 2 разрешают управляющие клеммы для включения или устройства без ввода сигналов.
- Может управлять двухфазным шаговым двигателем, четырехфазным шаговым двигателем или двумя двигателями постоянного тока.
- Имеет конденсатор фильтра большой емкости и обратный диод для защиты устройств от обратного тока индуктивной нагрузки.
- Встроенная трубка стабилизатора 78M05 может использоваться для получения 5В от блока питания. (Должен использоваться с внешним источником логики 5 В, когда напряжение привода превышает 12 В для защиты микросхемы)

L298 Распиновка
Функции контактов:
| Номер контакта | Имя контакта | Описание | ||
| 1 15 | Sense A Sense B | Используется для подключения измерительного резистора через этот контакт к земле для управления током Загрузка.  | ||
| 2 3 | Out 1 Out 2 | Выход моста A, который представляет собой ток, который проходит через между этими двумя контактами, который контролируется на контакте 1 | ||
| 4 | Vs | Напряжение питания на выходных силовых касках 11 | Включить A Включить B | TTL-совместимый вход включения |
| 8 | GND | GND (точка, где можно измерить все напряжения, от) | ||
| 9 | Vss | Напряжение питания для логики Блоки (неиндуктивный конденсатор 100 нФ должен быть подключен между контактом и землей) | ||
| 10 12 | Вход 3 Вход 4 9002 2 | TTL-совместимые входы моста B | ||
| 13 14 | Out 3 Out 4 | Выходы моста B.Ток, протекающий через здесь, контролируется на выводе 15 |
L298n Драйвер двигателя
Модуль L298 в основном используется для разработки драйверов двигателей. Компания Seeed предлагает различные драйверы двигателей L298n.
Компания Seeed предлагает различные драйверы двигателей L298n.
L298 Драйвер двигателя с двойным Н-мостом
- Модуль драйвера Double H использует двойной полномостовой драйвер ST L298N, интегрированную монолитную схему в 15-выводных корпусах Multiwatt и PowerSO20.
- Это высоковольтный, сильноточный двойной полномостовой драйвер, предназначенный для работы со стандартными логическими уровнями TTL и управления индуктивными нагрузками, такими как реле, соленоиды, двигатели постоянного тока и шаговые двигатели.
L298 — совместимый с .NET Gadgeteer
- Этот модуль драйвера двигателя управляет скоростью и направлением 2 двигателей постоянного тока, до 40 В, 3 А.
- Сам модуль питается и управляется с материнской платы gadgeteer, но двигатели питаются от отдельного источника питания.
Grove — Драйвер двигателя I2C
- Он напрямую управляет шаговым двигателем или двигателем постоянного тока. Его сердцем является двухканальный чип драйвера H-моста (L298N), который может обрабатывать ток до 2 А на канал, управляемый Atmel ATmega8L, который обеспечивает связь I2C с такими платформами, как Arduino.
- Оба двигателя могут работать одновременно, если установлены разные скорость и направление. Он может приводить в действие два щеточных двигателя постоянного тока или один четырехпроводной двухфазный шаговый двигатель.
 Его сердцем является двухканальный чип драйвера H-моста (L298N), который может обрабатывать ток до 2 А на канал, управляемый Atmel ATmega8L, который обеспечивает связь I2C с такими платформами, как Arduino.
Его сердцем является двухканальный чип драйвера H-моста (L298N), который может обрабатывать ток до 2 А на канал, управляемый Atmel ATmega8L, который обеспечивает связь I2C с такими платформами, как Arduino.Как работает драйвер двигателя l298n?
На схематической диаграмме ниже показана внутренняя структура и рабочий процесс драйвера двигателя L298n:
- Режим управления и состояние двигателя A показаны в таблице ниже:
| Двигатель 1 (IN1), Двигатель 2 (IN3) | Двигатель 1 (IN2), Двигатель 2 (IN4) | Двигатель Вращение |
| 0 | 0 | Остановка вращения |
| 0 | 1 | По часовой стрелке |
| 1 | 0 | Против часовой стрелки |
| 1 | 1 | Остановка вращения |
- Как видно из таблицы, направление вращения контролируется управляющими контактами IN1 и IN2 для двигателя 1, а управляющими контактами IN3 и IN4 для двигателя 2.
- Когда включен сигнал = 1
- IN1 и IN2 равны 00 или 11, это означает, что двигатель находится в состоянии тормоза
- IN1 равен 0, а IN2 равен 1, это означает, что двигатель A будет вращаться по часовой стрелке
- IN1 равен 1, а IN2 равен 0 означает, что двигатель A будет вращаться против часовой стрелки
- Метод управления двигателем B такой же, как и у двигателя A
- Скорость двигателя также можно контролировать с помощью штифта управления PWM модуля (ENA для двигателя 1, ENB для двигателя 2)
- При регулировании скорости , Сначала необходимо подтвердить направление вращения IN1 и IN2 и вывести импульсы ШИМ для задействованных клемм.

Давайте посмотрим, как драйвер двигателя с Н-мостом l298n работает с двигателем постоянного тока.
Для упрощения я нарисовал один комплект драйвера H-моста с 4 переключателями. Почему его называют H-мостом? Как вы можете видеть, в конфигурации с мотором, сидящим в мостовой части буквы H, есть буква H. Как это работает?
Почему его называют H-мостом? Как вы можете видеть, в конфигурации с мотором, сидящим в мостовой части буквы H, есть буква H. Как это работает?
Давайте подадим положительное напряжение на верхнюю часть H-моста и подадим отрицательное напряжение на нижнюю часть.
Итак, что происходит, когда мы замыкаем эти два переключателя?
Положительный полюс применяется к левой стороне двигателя, а отрицательный — к правой. В этом случае мотор будет вращаться по часовой стрелке .
И наоборот, если вы включите два других переключателя и оставите эти два открытыми.
Теперь положительный полюс применяется к правой стороне двигателя, а отрицательный — к другой стороне. В этом случае мотор будет вращаться против часовой стрелки .
Широтно-импульсная модуляция (ШИМ) Скорость двигателя определяется шириной импульса ШИМ, отправляемого на вход «Enable» драйвера двигателя L298N. Чем шире импульсы, тем быстрее будет вращаться мотор. Таким образом, ШИМ позволяет контролировать скорость.
Таким образом, ШИМ позволяет контролировать скорость.
Применение L298n
L298n Моторные драйверы используются повсюду в нашей повседневной жизни, от торговых автоматов до роботов. Вы также можете поиграть с L298n для управления двигателями постоянного тока прямо у себя дома с помощью руководства ниже
.Управление двигателями постоянного тока с помощью Arduino
Двойной H-мост L298n позволяет переключать направление тока, что означает, что с помощью двигателя вы можете заставить его вращаться в обоих направлениях.Кроме того, с входом PWM вы можете использовать Arduino, чтобы заставить его вращаться с любой скоростью.
- Шаг 1. Установка адреса с помощью дискового переключателя. Это новая функция, добавленная в наш новый драйвер двигателя I2C.
- Шаг 2 — Подключите Grove — драйвер двигателя I2C V1.3 к порту I2C Grove-Base Shield.
- Шаг 3 — Подключите Grove — Base Shield к Seeeduino.
- Шаг 4 — Подключите Seeeduino к ПК через USB-кабель
- Шаг 5 — Загрузите библиотеку Grove_I2C_Motor_Driver_v1_3 с Github.
- Шаг 6 — Обратитесь к разделу Как установить библиотеку для установки библиотеки для Arduino
- Шаг 7 — Скопируйте код в Arduino IDE и загрузите. Если вы не знаете, как загрузить код, проверьте, как загрузить код.

Код
Функции управления двигателями постоянного тока
- С помощью функции скорости — вы можете управлять одним двигателем с нужной скоростью.
- motor_id представляет, какой двигатель использовать (MOTOR1 / 2)
- _speed представляет скорость, которую вы можете установить.Это может быть от -100 до 100, при скорости> 0 двигатель постоянного тока будет вращаться по часовой стрелке, а если скорость <0, двигатель постоянного тока будет вращаться против часовой стрелки. Чем больше значение, тем быстрее.
- С функцией остановки — вы можете остановить работу двигателя постоянного тока.
- motor_id представляет, какой двигатель использовать (MOTOR1 / 2)

Вот и все! Теперь у вас есть собственный двигатель постоянного тока, управляемый с помощью Seeeduino с драйвером двигателя I2C!
Пример установки оборудованияЗаинтересованы в расширении возможностей вашего привода двигателя L298? Вы можете щелкнуть здесь, чтобы узнать, как управлять шаговым двигателем и играть с Codecraft с помощью драйвера двигателя L298n: Seeedstudio Wiki — Grove — Драйвер двигателя I2C V1.3
Сравнение с другими драйверами двигателя
В настоящее время так много драйверов двигателей, как сервомоторы и шаговые двигатели, в чем на самом деле разница между драйверами двигателей и тем, какой из них выбрать? Не беспокойтесь, мы создали таблицу специально для вас, чтобы сравнить различные приводы двигателей, чтобы вы знали, какой драйвер лучше всего подходит для вашего проекта.
Сводка
Обладая всеми знаниями о драйвере двигателя L298n, теперь вы можете начать создавать свои собственные робототехнические проекты! Вы можете ознакомиться с таблицей данных L298n для получения более подробной информации о L298 здесь: L298 Datasheet
Следите за нами и ставьте лайки:
Продолжить чтение
2A 7V-30V L298N Драйвер двигателя / шаговый драйвер (2 канала)
Примечание: Возможно, вы захотите проверить последнюю версию Cytron Maker Drive, которая является хорошей альтернативой для вашего проекта 🙂 Maker Drive — это двухканальный драйвер двигателя с защита от обратной полярности и стабильный выход 5 В (макс. 200 мА) для питания вашего контроллера.Мы разработали его для новичков!
200 мА) для питания вашего контроллера.Мы разработали его для новичков!
Если вы ищете недорогой драйвер двигателя, который может управлять двумя маленькими щеточными двигателями постоянного тока или одним шаговым двигателем, вы находитесь на правильной странице. Обратите внимание на этот недорогой драйвер двигателя на базе L298.
Совместимость с Arduino, CT-UNO, Maker-UNO, Raspberry Pi и многими другими платами контроллеров, поскольку она основана на логике TTL (от 0 до 5 В). Он обеспечивает управление:
- Пуском
- Стопом
- Тормозом
- Направление
- Скорость
вашего двигателя.Максимальный выходной ток составляет до 2 А (пиковое значение) на двигатель. На плате также есть встроенные диоды обратного / обратного ЭДС. Если вы запитаете его> 20 В постоянного тока и включите встроенный регулятор 5 В, он станет довольно теплым, и это нормально.
Какой двигатель подходит для этого привода? Пока двигатель:
- Щеточный двигатель постоянного тока с двумя выводами
- Рабочее напряжение: от 7 В до 30 В постоянного тока
- Номинальный ток ≤ 1,0 А
- Пиковый ток ≤ 2,0 А
- Или шаговый двигатель с 4 выводами (биполярный )
Характеристики:
- Драйвер двухканального двигателя для щеточного двигателя постоянного тока
- Он также может управлять биполярным шаговым двигателем
- Постоянный ток 1 А на канал (пик 2 А)
- Двигатель V: от 7 В до 30 В постоянного тока
- Размер: 5. 5 см x 4,4 см 2,7 см
- Готов с:
- Vmotor, клеммы GND и 5V
- Выходные клеммы A и B для двигателя
- Радиатор, установленный с L298 для лучшего рассеивания тепла
- Обратные ЭДС диоды
- Контакты разъема для IN1, IN2, IN3 и IN4
- Встроенный регулятор напряжения 5 В
- Совместим с Arduino, Raspberry Pi, но требует ручного подключения.
 5 см x 4,4 см 2,7 см
5 см x 4,4 см 2,7 смДокументы:
Упаковочный лист:
L298N Модуль контроллера драйвера постоянного / шагового двигателя с двойным мостом H — Robu.в | Индийский интернет-магазин | Радиоуправляемый хобби
Этот драйвер двигателя для двигателей постоянного тока и шагового двигателя широко популярен, потому что он использует знаменитую микросхему L298N Dual H Bridge Driver Chip. Этот привод двигателя оптимизирован для максимальной производительности по цене, которую может себе позволить каждый.
Модуль контроллера драйвера постоянного / шагового двигателя с двойным Н-мостом L298N предназначен для управления двумя двигателями робота. Он использует популярный чип L298N Dual H-Bridge Motor Driver и достаточно мощный, чтобы управлять двигателями от 5-35 Вольт и до 2 А на канал.Гибкие элементы управления цифровым входом позволяют каждому двигателю быть полностью независимым с полным контролем над направлением скорости и тормозным действием.
Он использует популярный чип L298N Dual H-Bridge Motor Driver и достаточно мощный, чтобы управлять двигателями от 5-35 Вольт и до 2 А на канал.Гибкие элементы управления цифровым входом позволяют каждому двигателю быть полностью независимым с полным контролем над направлением скорости и тормозным действием.
На этой плате имеется удобный стабилизатор 5 В, который можно использовать для питания других схем, например микроконтроллера вашего робота. Его модульная конструкция легко адаптируется к широкому спектру контроллеров роботов, включая популярное семейство Arduino.
Этот модуль драйвера L298N использует оригинальный новый чип L298N от компании ST. Он использует процесс SMT и высококачественный алюминиевый электролитический конденсатор для стабилизации цепи.Модуль может легко управлять скоростью и направлением двигателя постоянного тока, а также управлять двухфазным шаговым двигателем.
У нас есть ряд драйверов двигателей, используемых в роботизированных приложениях для управления сервоприводами, шаговыми двигателями, двигателями постоянного тока и т. Д., Вы можете проверить их, щелкнув имя ниже,
Д., Вы можете проверить их, щелкнув имя ниже,
Драйверы двигателей
Характеристики:
- Популярная микросхема драйвера двигателя с двойным H-мостом L298N
- Драйверы двигателей от 5-35 В до 2 А на канал
- Имеет 4 светодиода, отражающих состояние логики управления
- Независимое направление, скорость и торможение для каждого двигателя
- Винтовые клеммы для простого подключения к двигателям и источникам питания
- Включает прочный радиатор для максимальной производительности
- Легко взаимодействует с большинством контроллеров роботов
- Поддерживает определение тока
- Handy power LED
В коплект входит:
1 x L298N Модуль контроллера шагового двигателя постоянного тока с двойным мостом
Гарантия 15 дней На этот товар распространяется стандартная гарантия сроком 15 дней с момента доставки только в отношении производственных дефектов. Эта гарантия предоставляется клиентам Robu в отношении любых производственных дефектов. Возмещение или замена производятся в случае производственных дефектов.
Эта гарантия предоставляется клиентам Robu в отношении любых производственных дефектов. Возмещение или замена производятся в случае производственных дефектов.
Что аннулирует гарантию:
Если продукт подвергся неправильному использованию, вмешательству, статическому разряду, аварии, повреждению водой или огнем, использованию химикатов, пайке или каким-либо изменениям.
L298N Dual H Bridge Motor Driver
L298N Dual H Bridge Motor Driver info
L298N Dual H Bridge Motor Driver — это коммутационная плата контроллера двигателя, которая обычно используется для управления скоростью и направлением двигателей.Его также можно использовать для управления яркостью определенных световых проектов, таких как мощные светодиодные матрицы.
H-мост — это схема, которая может управлять током любой полярности и управляться с помощью широтно-импульсной модуляции.
Описание контактов L298N Dual H Bridge Motor Driver :
- Out 1 : Вывод двигателя A 1
- Out 2 : Вывод двигателя A 2
- Out 3 : Вывод двигателя B 1
- Вых Вывод A 1
- In2 : Вход для вывода двигателя A 2
- In3 : Вход для вывода вывода двигателя B 1
- In4 : Вход для вывода двигателя B 2
- EnB : Включает ШИМ-сигнал для двигателя B
L298N Драйвер двигателя с двумя мостами H — общие характеристики
- Драйвер двигателя с двумя мостами H
- Драйвер двигателя L298N IC
- Управляет до 2 двунаправленных двигателей постоянного тока
- Integ номинальный регулятор мощности 5 В
- Напряжение привода 5–35 В
- Максимальный ток привода 2 А
Драйвер двигателя с двойным мостом H, L298N — Технические характеристики
- Микросхема привода с двумя мостами H : L298N
- : Логическое напряжение 5 В
- Напряжение привода : 5–35 В
- Логический ток : 0-36 мА
- Ток привода : 2 А (макс. Одинарный мост)
- Макс.мощность : 25 Вт
- Размеры : 43 x 43 43 x 26 мм
- Вес : 26 г
 Одинарный мост)
Одинарный мост)Видео
Dual H Bridge L298N Модуль платы контроллера шагового двигателя с ШИМ — Envistia Mall
Этот модуль драйвера на основе L298N представляет собой высоковольтный, сильноточный двойной полномостовой драйвер, предназначенный для приема стандартных логических уровней TTL и управления индуктивными нагрузками, такими как реле, соленоиды, двигатели постоянного тока и шаговые двигатели от 5 В до 35 В.
Он может легко управлять скоростью и направлением двигателя постоянного тока, а также может управлять двухфазными шаговыми двигателями. Его можно использовать для других проектов, таких как управление яркостью определенных световых проектов, таких как мощные светодиодные матрицы, с использованием управления широтно-импульсной модуляцией (ШИМ).
Два входа включения предназначены для включения или отключения устройства независимо от входных сигналов.
Направление двигателя контролируется путем отправки на привод сигнала ВЫСОКИЙ или НИЗКИЙ для каждого двигателя (или канала).Например, для двигателя A ВЫСОКИЙ к IN1 и НИЗКИЙ к IN2 заставят его повернуться в одном направлении, а НИЗКИЙ и ВЫСОКИЙ заставят его повернуться в другом направлении.
В модуль встроен регулятор на 5 В. При включении перемычкой 5 В подается на выход на разъеме питания и может использоваться в качестве источника постоянного тока 5 В для других компонентов схемы. (При включении входное напряжение модуля должно быть не менее 6 В). Когда он отключен, предоставляется отдельный вход 5 В для управления схемой логического уровня этого модуля.
Параметры контроллера:
- Микросхема драйвера: L298N двойной драйвер H-моста
- Напряжение привода: от + 5 В до + 35 В (входное напряжение должно быть не менее 6 В, когда включен внутренний регулятор 5 В)
- Пиковый ток привода Io: 2 A / мост
- Диапазон питания логики Vss: от + 4 В до + 5,5 В постоянного тока (Не требуется, если включен внутренний регулятор. Когда включен, 5 В доступны как выход на разъеме питания
- Диапазон входного напряжения управляющего сигнала: 4.5-5,5 В высокий 0 В низкий
- Максимальная потребляемая мощность: 20 Вт
- Температура хранения: -25 ~ +130 C
- Размеры (приблизительные): 43 мм x 43 мм x 27 мм ДхШхВ (1,7 «x 1,7» x 1,1 «)
- Вес: 26 г
 Когда включен, 5 В доступны как выход на разъеме питания
Когда включен, 5 В доступны как выход на разъеме питанияВ комплект входит:
- 1x Dual H Bridge L298N Модуль контроллера привода ШИМ шагового двигателя постоянного тока
- Технические характеристики и инструкция по эксплуатации
Получите быстрее! Мы отправляем в течение 1 рабочего дня из нашего офиса в США в Колорадо для быстрой доставки.
Другие ссылки и ресурсы:
Как использовать модуль драйвера двигателя L298 — Учебное пособие по Arduino по инструкциям: http://www.instructables.com/id/How-to-use-the-L298-Motor-Driver-Module-Arduino-Tu/
КАК: управлять двигателями постоянного тока с помощью Arduino + L298N на Youtube
 youtube.com/embed/kv-9mxVaVzE?rel=0″/>
youtube.com/embed/kv-9mxVaVzE?rel=0″/>
Project 033c L298N Модуль драйвера двигателя с двойным Н-мостом, униполярный или биполярный шаговый двигатель постоянного тока 6 В / 12 В на Lex C / ACOPTEX.COM
Основы: Проект 033c
Название проекта: L298N Модуль привода двигателя с двойным Н-мостом, 6 В / 12 В постоянного тока униполярный или биполярный Шаговый двигатель Nema 17
Вложения: sketch2, sketch3, sketch4 с потенциометром
Теги: Arduino, DC 6v / 12v униполярный, биполярный шаговый двигатель, Nema 17 , L298N Модуль драйвера двигателя с двойным H-мостом
В этом проекте вам понадобились эти детали:
1.Aruduino Uno R3 (также можно использовать другую версию Arduino)
2.L298N Модуль драйвера двигателя H-Bridge (как вы видите, они могут немного отличаться, но имеют одинаковый принцип работы) 1 шт.
3. Arduino IDE (скачать можно отсюда)
Arduino IDE (скачать можно отсюда)
4. кабельные перемычки
5. Однополярный или биполярный шаговый двигатель постоянного тока 6 В / 12 В Nema 17 1 шт.
6. Внешний источник питания постоянного тока двигателя 1 шт.
7.Внешний источник питания логики L298N IC (опционально, в зависимости от внешнего источника питания двигателя) 1 шт.
Общие
Мы узнаем, как подключить модуль драйвера двигателя H-Bridge L298N к плате Arduino и использовать его с униполярным или биполярным шаговым двигателем постоянного тока 6 В / 12 В. Это наиболее полное руководство по этому модулю.
Знакомство с шаговым двигателем
Что такое шаговый двигатель?
Цифровой электродвигатель, который перемещается на один шаг за раз, и каждый шаг определяется углом шага.Шаговый двигатель во время своего вращения движется отдельными шагами. Каждая ступенька определяется углом ступени. В приведенном ниже примере вы можете заметить, что у ротора есть 4 различных шага для полного вращения на 360 градусов. Как определено в шаге под углом 90 градусов. Поскольку шаговый двигатель действительно движется незаметно, мы можем сказать, что шаговый двигатель на самом деле является двигателем с цифровым управлением. Эта характеристика делает его очень подходящим для цифровых интерфейсов, интегрируемых с микроконтроллером.
Как определено в шаге под углом 90 градусов. Поскольку шаговый двигатель действительно движется незаметно, мы можем сказать, что шаговый двигатель на самом деле является двигателем с цифровым управлением. Эта характеристика делает его очень подходящим для цифровых интерфейсов, интегрируемых с микроконтроллером.
Шаговые двигатели не похожи на простые двигатели постоянного тока, и их нельзя приводить в движение, подавая только постоянное напряжение.Схема драйвера и микроконтроллер необходимы для управления скоростью и направлением шагового двигателя.
Шаговый двигатель позволяет «шагать» точно на заданный угол. Кроме того, шаговый двигатель имеет то преимущество, что он имеет удерживающий момент: шаговые двигатели могут удерживать свое положение, когда они не двигаются.
Шаговые двигателидоступны в двух вариантах: униполярном и биполярном.
Биполярные двигатели являются самым мощным типом шаговых двигателей и обычно имеют четыре вывода. У них есть два набора электромагнитных катушек внутри, и ступенчатое переключение достигается путем изменения направления тока внутри этих катушек.
Униполярные двигатели, идентифицируемые по 5, 6 или даже 8 проводам, также имеют две катушки, но каждая из них имеет центральный отвод. Униполярные двигатели могут работать без изменения направления тока в катушках, что упрощает электронику. Однако, поскольку центральный отвод используется для подачи питания только на половину каждой катушки за раз, они обычно имеют меньший крутящий момент, чем биполярные.
Униполярные двигатели обычно имеют две катушки на фазу, по одной для каждого направления магнитного поля.
Биполярные двигатели обычно имеют по одной катушке на фазу, и ток течет через эту катушку в обоих направлениях.Таким образом, биполярный двигатель сможет создавать вдвое больший крутящий момент, поскольку в любой момент времени однополярный двигатель использует только половину своих обмоток.
Униполярные шаговые двигатели обычно имеют 6 проводов, каждая фаза катушки имеет центральный отвод. Если оба центральных (общих) провода соединить вместе, получится 5-проводный униполярный. Чтобы преобразовать униполярный шаговый двигатель в биполярный шаговый двигатель (4 провода), просто оставьте центральные отводы (2 провода) неподключенными.
Чтобы преобразовать униполярный шаговый двигатель в биполярный шаговый двигатель (4 провода), просто оставьте центральные отводы (2 провода) неподключенными.
Подробнее о них можно прочитать здесь и здесь.
Мы будем использовать шаговые двигатели Nema 17 DC 6V и 12V.
1. Униполярный шаговый двигатель Nema 17, 12 В постоянного тока, спецификация
- Номер детали производителя: 17HM15-0406D
- Тип двигателя: униполярный шаговый
- Угол шага: 0,9 град.
- Удерживающий момент: 26 Нсм (36,8 унций)
- Номинальный ток / фаза: 0,4 А
- Напряжение: 12 В
- Фазовое сопротивление: 30 Ом
- Индуктивность: 30 мГн ± 20% (1 кГц)
- Размер рамы: 42 x 42 мм
- Длина корпуса: 39 мм
- Диаметр вала: Φ5 мм
- Длина переднего вала: 24 мм
- D-образный вырез Длина: 15 мм
- Длина заднего вала: 10 мм
- Количество выводов: 6
- Длина провода: 500 мм
- Вес: 300 г
См. Дополнительную информацию здесь.
Дополнительную информацию здесь.
2. Униполярный шаговый двигатель Nema 17, 6 В постоянного тока, спецификация
- Номер детали производителя: 17HM15-0806S
- Тип двигателя: униполярный шаговый
- Угол шага: 0,9 град.
- Удерживающий момент: 26 Нсм (36,8 унций)
- Номинальный ток / фаза: 0,8 А
- Напряжение: 6 В
- Фазовое сопротивление: 7,5 Ом
- Индуктивность: 7,5 мГн ± 20% (1 кГц)
- Размер рамы: 42 x 42 мм
- Длина корпуса: 39 мм
- Диаметр вала: Φ5 мм
- Длина вала: 24 мм
- D-образный вырез Длина: 15 мм
- Количество выводов: 6
- Длина провода: 500 мм
- Вес: 300 г
См. Дополнительную информацию здесь.
Общие сведения о L298N H-Bridge Модуль привода двигателя
H-Bridge обычно используются для управления скоростью и направлением двигателей, но могут использоваться и для других проектов, таких как управление яркостью определенных световых проектов, таких как мощные светодиодные матрицы. H-мост — это схема, которая может управлять током любой полярности и управляться с помощью широтно-импульсной модуляции (ШИМ).
H-мост — это схема, которая может управлять током любой полярности и управляться с помощью широтно-импульсной модуляции (ШИМ).
PWM — это метод, который позволяет нам регулировать среднее значение напряжения, которое подается на электронное устройство, путем быстрого включения и выключения питания.Среднее напряжение зависит от рабочего цикла или количества времени, в течение которого сигнал включен, в зависимости от количества времени, в течение которого сигнал отключен за один период времени.
Если вы читали об управлении светодиодами с помощью микроконтроллера, вы, вероятно, уже сталкивались с ШИМ, поскольку это также хороший метод управления яркостью светодиода. С ШИМ двигателю постоянного тока посылается серия импульсов. Каждый импульс соответствует полному напряжению, с которым двигатель может справиться, поэтому на двигатель на 6 вольт будут отправляться импульсы 6 вольт, а на двигатель на 12 вольт — импульсы на 12 вольт.Ширина импульсов варьируется для управления скоростью двигателя, импульсы с малой шириной заставят двигатель вращаться довольно медленно. Увеличение ширины импульса увеличит скорость двигателя, как показано ниже.
Увеличение ширины импульса увеличит скорость двигателя, как показано ниже.
Чтобы полностью остановить двигатель, вы просто прекращаете подавать на него импульс, по сути, посылая на него нулевое напряжение. Чтобы запустить его на полной скорости, вы подаете на него полное напряжение, опять же без пульсации.
Arduino имеет функцию под названием «analogWrite», которая используется для управления любым из его выходов, поддерживающих ШИМ (Arduino Uno имеет 6 цифровых выходов (контакты 3,5,6,9,10,11), которые также могут работать с ШИМ. ).Двигатели постоянного тока прослужат намного дольше и будут более надежными, если будут управляться через ШИМ.
Давайте проверим, как изменить направление двигателя постоянного тока, изменив полярность, и как изменить их скорость, используя широтно-импульсную модуляцию с использованием очень распространенной конфигурации схемы, называемой «H-мостом».
Н-мостовая схема содержит четыре переключающих элемента, транзисторов или полевых МОП-транзисторов, с двигателем в центре, образующим Н-образную конфигурацию. Использование транзисторов также позволяет управлять скоростью двигателя с помощью ШИМ, как описано выше.Активировав два определенных переключателя одновременно, мы можем изменить направление тока, тем самым изменив направление вращения двигателя.
Использование транзисторов также позволяет управлять скоростью двигателя с помощью ШИМ, как описано выше.Активировав два определенных переключателя одновременно, мы можем изменить направление тока, тем самым изменив направление вращения двигателя.
На первой диаграмме мы видим четыре переключателя, которые все находятся в разомкнутом или «выключенном» положении. В центре схемы — двигатель постоянного тока. Если вы посмотрите на схему, как она изображена здесь, вы можете отчетливо увидеть букву «H» с двигателем, прикрепленным в центре или в «мостовой» секции — отсюда и термин «H-мост».
Если мы закроем (т.е. включить) два переключателя, вы можете увидеть, как напряжение подается на двигатель, заставляя его вращаться по часовой стрелке.
Теперь мы откроем эти переключатели и замкнем два других. Как видите, это приводит к изменению полярности напряжения, подаваемого на двигатель, в результате чего наш двигатель вращается против часовой стрелки.
Это довольно просто, но эффективно. Фактически, если все, что вам нужно сделать, это разработать схему для привода двигателя на полной скорости в любом направлении, вы можете построить ее, как показано здесь, используя центральный переключатель 4PDT (4-полюсный двухпозиционный переключатель).Но, конечно, мы хотим управлять двигателем с помощью Arduino, поэтому нам нужна электронная схема, в которой переключатели заменены транзисторами.
L298N Н-образный мост
Хотя для построения H-моста можно использовать дискретные транзисторы, использование интегральной схемы дает ряд преимуществ. Доступен ряд ИС драйверов двигателя H-Bridge, и все они работают практически одинаково. Один из самых популярных — L298N.
L298N является членом семейства микросхем, которые имеют обозначение «L298».Разница между членами семьи заключается в силе тока, которую они могут выдержать.
L298N фактически содержит две полные схемы H-моста, поэтому он может управлять парой двигателей постоянного тока. Это делает его идеальным для робототехнических проектов, поскольку большинство роботов имеют два или четыре ведущих колеса. L298N также может использоваться для управления одним шаговым двигателем, однако мы не будем рассматривать эту конфигурацию в этой статье.
Это делает его идеальным для робототехнических проектов, поскольку большинство роботов имеют два или четыре ведущих колеса. L298N также может использоваться для управления одним шаговым двигателем, однако мы не будем рассматривать эту конфигурацию в этой статье.
L298N схемы:
L298N Модуль драйвера двигателя с двойным Н-мостом может управлять двумя двигателями постоянного тока или одним биполярным шаговым двигателем.
Логическая таблица L298N:
L = низкий, H = высокий, X = безразличный, Z = высокий импеданс, Vin = входное напряжение, Vdrop = падение напряжения
Примечание. Между входным напряжением и выходами двигателя L298N существует перепад напряжения, можно ожидать, что падение напряжения от 1 В до 3 В зависит от входного напряжения и потребляемого тока.
Технические характеристики:
- Обломок привода с двойным Н-мостом: L298N
- Логическое напряжение: 5 В постоянного тока
- Напряжение привода: 5-35 В постоянного тока
- Логический ток: 0-36 мА
- Пиковый ток привода: до 2 А МАКС. Одинарный мост (один двигатель постоянного тока)
- Максимальная мощность: 25 Вт
- Размеры: 43 x 43 x 26 мм
- Вес: 26 г
 Одинарный мост (один двигатель постоянного тока)
Одинарный мост (один двигатель постоянного тока)См. Дополнительную информацию о микросхеме L298N здесь и здесь.
Сигналы и подключения шагового двигателя Nema 17
1.Униполярный шаговый двигатель (тоже может быть биполярным). Используется в проекте
2. Биполярный шаговый двигатель (тот же производитель, но разные цвета проводов)
Сигналы и подключения модуля привода двигателя H-Bridge L298N
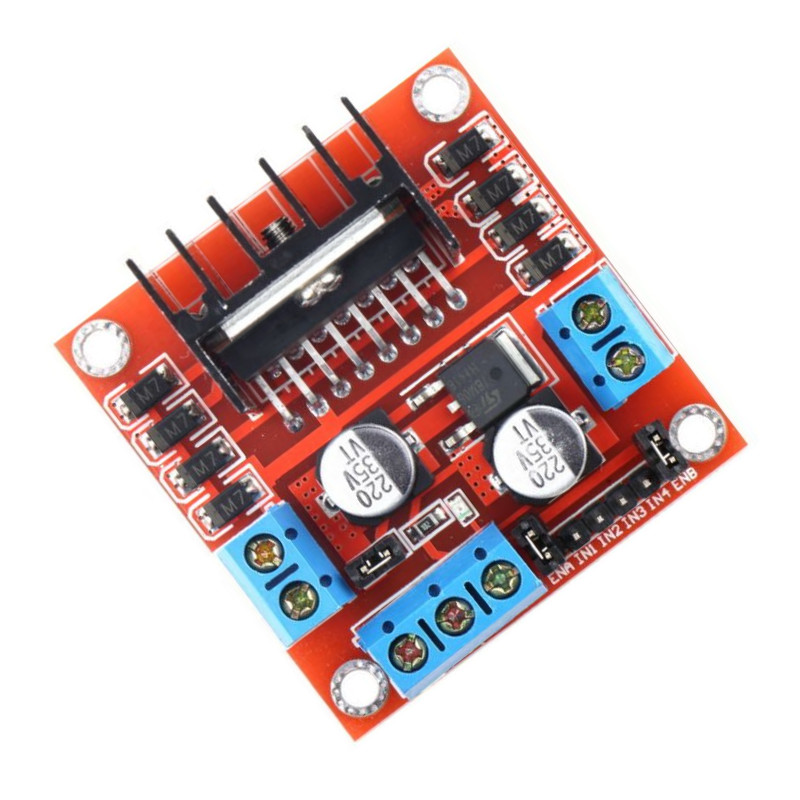
L298N распиновка интегральных схем:
Вы найдете несколько разных версий плат L298N, но все они работают одинаково.Плата содержит L298N, установленный на радиаторе, регулятор напряжения на 5 В для «опционального» питания логических схем, поддерживающих диодов, конденсаторов и разъемов, как показано ниже:
- Логические входы для каждой H-мостовой схемы
- Входы питания для источника питания двигателя
- Дополнительный вход питания 5 В для логических цепей.
- Выходы для каждого двигателя постоянного тока

L298N Перемычки модуля драйвера двигателя H-Bridge:
CSA — Это функция «измерения тока» для двигателя А.Если перемычка находится в положении, эта функция игнорируется. В большинстве случаев этот джемпер остается на месте.
CSB — Функция «измерения тока» для двигателя B. Если установлена перемычка, эта функция игнорируется. В большинстве случаев этот джемпер остается на месте.
UR1 — Входной 1 подтягивающий резистор. Обычно вы оставляете это на месте, что позволяет использовать на входе подтягивающий резистор 10 кОм.
UR2 — Вход 2 подтягивающего резистора.
UR3 — Входной 3 подтягивающий резистор.
UR4 — Входные 4 подтягивающих резистора.
5v-EN — Это единственная перемычка, на которую действительно нужно обращать внимание. Когда эта перемычка установлена, она включает внутреннюю микросхему регулятора напряжения 78M05 5V на плате, обеспечивая питание логики от источника питания двигателя. Когда эта перемычка активирована, вам будет НЕ нужно будет подавать 5 В на входную клемму 5 В. Когда перемычка удалена , вам понадобится , чтобы подать 5 В на входную клемму 5 В.
Когда эта перемычка установлена, она включает внутреннюю микросхему регулятора напряжения 78M05 5V на плате, обеспечивая питание логики от источника питания двигателя. Когда эта перемычка активирована, вам будет НЕ нужно будет подавать 5 В на входную клемму 5 В. Когда перемычка удалена , вам понадобится , чтобы подать 5 В на входную клемму 5 В.
L298N Штыри модуля драйвера двигателя H-моста:
Двигатель A (или OUTA, OUTB) (или OUT1, OUT2) — Выход двигателя постоянного тока A (+, -) или шаговый двигатель (+, -)
Двигатель B (или OUTC, OUTD) (или OUT3, OUT4) — Выход двигателя постоянного тока B (+, -)
VMS (или VCC) (или VDD) — Внешнее питание двигателей от 5 до 35 В
GND — масса
+ 5V — DC 5V выход или вход для логических схем
ENA (или EN1) — Перемычка включения двигателя А постоянного тока. Подключите к выходу PWM для управления скоростью двигателя постоянного тока A (оставьте это на месте при использовании шагового двигателя).
Подключите к выходу PWM для управления скоростью двигателя постоянного тока A (оставьте это на месте при использовании шагового двигателя).
ENB (или EN2) — Перемычка включения двигателя постоянного тока B. Подключите к выходу PWM для управления скоростью двигателя постоянного тока B (оставьте это на месте при использовании шагового двигателя).
IN1 (или N1) (или INA) — Вход 1 для двигателя постоянного тока A
IN2 (или N2) (или INB) — Вход 2 для двигателя постоянного тока A
IN3 (или N3) (или INC) — Вход 3 для двигателя постоянного тока B
IN4 (или N4) (или IND) — Вход 4 для двигателя постоянного тока B
Модуль драйвера двигателя с двойным Н-мостом L298N имеет встроенный (внутренний) регулятор 5 В, который включается или выключается с помощью перемычки регулятора 5 В . Если внешнее напряжение питания двигателя составляет до 12 В, мы можем включить встроенный (внутренний) регулятор 5 В, а вывод + 5 В можно использовать в качестве выхода, например, для питания вашей платы Arduino. Но если внешнее напряжение питания двигателя превышает 12 В, мы должны отсоединить перемычку 5 В, поскольку эти напряжения вызовут повреждение встроенного (внутреннего) регулятора 5 В. В этом случае вывод + 5V будет использоваться в качестве входа, поскольку нам нужно подключить его к источнику питания 5V, чтобы микросхема L298N работала правильно.
Если внешнее напряжение питания двигателя составляет до 12 В, мы можем включить встроенный (внутренний) регулятор 5 В, а вывод + 5 В можно использовать в качестве выхода, например, для питания вашей платы Arduino. Но если внешнее напряжение питания двигателя превышает 12 В, мы должны отсоединить перемычку 5 В, поскольку эти напряжения вызовут повреждение встроенного (внутреннего) регулятора 5 В. В этом случае вывод + 5V будет использоваться в качестве входа, поскольку нам нужно подключить его к источнику питания 5V, чтобы микросхема L298N работала правильно.
Обратите внимание, что на микросхеме L298N падение напряжения составляет около 2 В.Так, например, если мы используем источник питания 12 В, напряжение на клеммах двигателя будет около 10 В, а это означает, что мы не сможем добиться максимальной скорости от двигателя 12 В постоянного тока.
Электропроводка
На следующем рисунке показаны необходимые соединения с Arduino Uno:
1. Униполярный шаговый двигатель DC 6V. Убедитесь, что перемычки на ENB и + 5V, ENB и + 5V удалены с платы драйвера двигателя, а перемычка регулятора 5V_EN (5V) установлена на плате драйвера двигателя.
Униполярный шаговый двигатель DC 6V. Убедитесь, что перемычки на ENB и + 5V, ENB и + 5V удалены с платы драйвера двигателя, а перемычка регулятора 5V_EN (5V) установлена на плате драйвера двигателя.
2. Биполярный шаговый двигатель DC 6V. Мы используем униполярный шаговый двигатель с 4-х проводным подключением. Это могут быть разные цвета проводов шагового двигателя — например вместо КРАСНОГО будет ЧЕРНЫЙ, ЖЕЛТЫЙ -> ЗЕЛЕНЫЙ, СИНИЙ -> КРАСНЫЙ, ЗЕЛЕНЫЙ -> СИНИЙ. Прежде чем приступить к подключению, проверьте спецификацию вашего двигателя. Убедитесь, что перемычки на ENB и + 5V, ENB и + 5V удалены с платы драйвера двигателя, а перемычка регулятора 5V_EN (5V) установлена на плате драйвера двигателя.
3.Униполярный шаговый двигатель постоянного тока 12В. Убедитесь, что перемычки на ENB и регуляторе + 5V, ENB и + 5V, 5V_EN (5V) удалены с платы драйвера двигателя.
4. Биполярный шаговый двигатель постоянного тока 12В. Мы используем униполярный шаговый двигатель с 4-х проводным подключением.%20shagcnc-500x500.jpg) Это могут быть разные цвета проводов шагового двигателя — например вместо КРАСНОГО будет ЧЕРНЫЙ, ЖЕЛТЫЙ -> ЗЕЛЕНЫЙ, СИНИЙ -> КРАСНЫЙ, ЗЕЛЕНЫЙ -> СИНИЙ. Убедитесь, что перемычки на ENB и регуляторе + 5V, ENB и + 5V, 5V_EN (5V) удалены с платы драйвера двигателя.
Это могут быть разные цвета проводов шагового двигателя — например вместо КРАСНОГО будет ЧЕРНЫЙ, ЖЕЛТЫЙ -> ЗЕЛЕНЫЙ, СИНИЙ -> КРАСНЫЙ, ЗЕЛЕНЫЙ -> СИНИЙ. Убедитесь, что перемычки на ENB и регуляторе + 5V, ENB и + 5V, 5V_EN (5V) удалены с платы драйвера двигателя.
5. Рисунок 3 с потенциометром. Посмотрите, как потенциометр подключен к Arduino Uno ниже.
6. Альтернативное подключение шагового двигателя
Пошаговая инструкция
- Сделать разводку.
- Если вы все же используете внутренний регулятор напряжения, вам необходимо обеспечить источник питания двигателя напряжением не менее 7,5 В. Напряжение внешнего источника питания двигателя должно быть немного выше, чем фактические требования к двигателю.Это связано с внутренним падением напряжения на транзисторах, образующих Н-мостовую схему. Комбинированное падение напряжения составляет 1,4 В, поэтому, если вы используете двигатели на 6 В, вам необходимо подать на плату 7,4 В, если у вас есть двигатели на 12 В, тогда напряжение питания вашего двигателя должно быть 13,4 В.
- Подключите внешний источник питания двигателя — положительный (красный провод) к контакту + 12В на модуле драйвера двигателя и отрицательный (черный провод) к контакту GND рядом с контактом + 12В. Если ваш внешний источник питания двигателя превышает 12 В, снимите перемычку регулятора 5 В с модуля драйвера двигателя.Не забудьте подключить плату Arduino GND к контакту GND на модуле драйвера двигателя, чтобы замкнуть цепь.
- Подключите внешний источник питания логики L298N — положительный (красный провод) к контакту + 5V на модуле драйвера двигателя и отрицательный (черный провод) к контакту GND рядом с контактом + 5V. Не забудьте подключить плату Arduino GND к контакту GND на модуле драйвера двигателя, чтобы замкнуть цепь.
- Откройте IDE Arduino.
- Подключите плату Adruino Uno к компьютеру и выберите правильную плату и com-порт
- Откройте последовательный монитор и установите скорость 9600 бод
- Проверьте и загрузите калибровочный эскиз в свой Adruino Uno
Резюме
Мы узнали, как подключить модуль драйвера двигателя H-Bridge L298N к плате Arduino и использовать его с униполярным или биполярным шаговым двигателем постоянного тока 6 В / 12 В.