


Короткозамкнутый и фазный ротор. В чем различие?
Здравствуйте, дорогие читатели. В этой статье мы вам расскажем, про короткозамкнутый и фазный ротор, про их устройство и принцип действия.
И так..
Асинхронные электродвигатели имеют трехфазную обмотку статора, которая может формировать разное количество пар магнитных полюсов в зависимости от своей конструкции, что влияет в свою очередь на номинальные обороты двигателя при номинальной частоте питающего трехфазного напряжения. При этом роторы двигателей данного типа могут отличаться, и у асинхронных двигателей они бывают короткозамкнутыми или фазными.
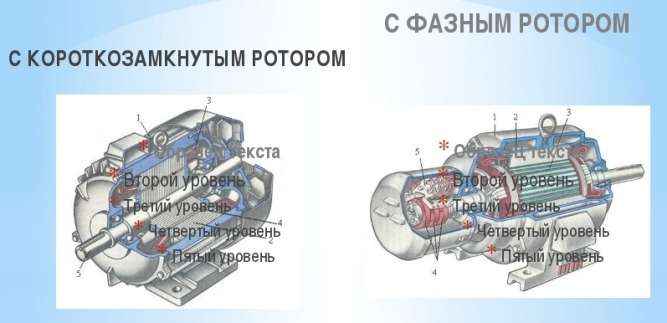
Короткозамкнутый и фазный ротор у асинхронного двигателя
Короткозамкнутый ротор
Представления о явлении электромагнитной индукции подскажут нам, что произойдет с замкнутым витком проводника, помещенным во вращающееся магнитное поле, подобное магнитному полю статора асинхронного двигателя. Если поместить такой виток внутри статора, то когда ток на обмотку статора будет подан, в витке будет индуцироваться ЭДС, и появится ток, то есть картина примет вид: виток с током в магнитном поле. Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Так и работает асинхронный двигатель с короткозамкнутым ротором, только вместо витка на его роторе расположены медные или алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора. Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.

Короткозамкнутый ротор и беличья клечатка
Проходящий по обмоткам статора переменный ток, порождающий вращающееся магнитное поле, наводит ток в замкнутых контурах «беличьей клетки», и весь ротор приходит во вращение. Поскольку в каждый момент времени разные пары стержней ротора будут иметь различные индуцируемые токи: какие-то стержни — большие токи, какие-то — меньшие, в зависимости от положения тех или иных стержней относительно поля. И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.

Короткозамкнутый ротор асинхронного электродвигателя
К тому же стержни «беличьей клетки» немного наклонены по отношению к оси вращения — они не параллельны валу. Наклон сделан для того, чтобы момент вращения сохранялся постоянным и не пульсировал, кроме того наклон стержней позволяет снизить действие высших гармоник индуцируемых в стержнях ЭДС. Будь стержни без наклона — магнитное поле в роторе пульсировало бы.
Механическая характеристика асинхронного двигателя, скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля. То есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться. Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует. При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Фазный ротор

Фазный ротор
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.

Фазный ротор асинхронного электродвигателя
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором. И аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т. д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
Видео, короткозамкнутый и фазный ротор
Другие статьи про двигатели:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
Короткозамкнутый и фазный ротор. Трехфазный асинхронный двигатель с короткозамкнутым ротором
Министерство науки и образования Российской Федерации
Федеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
Национальный исследовательский
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Электроснабжения и Электротехники
Отчет по лабораторной работе №11
по дисциплине «Общая электротехника и электроника»
Выполнил
Студент СМо-11-1 ________ Копытко Я.В. 20.10.2012
Доцент каф. Э и ЭТ ________ Кирюхин Ю.А. __________
(подпись) Фамилия И.О. (дата)
Иркутск 2012
Цель работы 3
1 Краткие теоретические сведения 3
Оборудование электрической установки 7
2 Порядок выполнения работы 7
3 Расчетная часть 9
4 Графики 10
Контрольные вопросы 14
Список литературы 17
Цель работы
Ознакомиться с устройством и принципом действия трехфазного асинхронного двигателя с короткозамкнутым ротором и исследовать влияние напряжения на фате статора на его характеристики.
1 Краткие теоретические сведения
1)Устройство, принцип действия асинхронного двигателя.
Асинхронный двигатель – это машина переменного тока. Слово “асинхронный” означает не одновременный. При этом имеется в виду, что у асинхронных двигателей частота вращения магнитного поля отличается от частоты вращения ротора. Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
Статор – неподвижная часть машины. Его сердечник с целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали толщиной 0,35 – 0,5 мм, изолированных друг от друга слоем лака. В пазы магнитопровода статора укладывается обмотка. В трехфазных двигателях обмотка трехфазная. Фазы обмотки могут соединяться в звезду или в треугольник в зависимости от величины напряжения сети.
Ротор – вращающаяся часть двигателя. Магнитопровод ротора представляет собой цилиндр, набранный из штампованных листов электротехнической стали. В пазах ротора укладывают обмотку. В зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные (с контактными кольцами). Короткозамкнутая обмотка представляет собой неизолированные медные или алюминиевые стержни, соединенные с торцов кольцами из этого же материала (“беличья клетка”).
У фазного ротора в пазах магнитопровода уложена трехфазная обмотка, фазы которой соединены звездой. Свободные концы фаз обмотки присоединены к трем медным контактным кольцам, насаженным на вал двигателя. Контактные кольца изолированы друг от друга и от вала. К кольцам прижаты угольные или медно-графитные щетки. Через контактные кольца и щетки в обмотку ротора можно включить трехфазный пуско-регулировочный реостат.
Преобразование электрической энергии в механическую в асинхронном двигателе осуществляется посредством вращающегося магнитного поля. Необходимыми условиями возбуждения вращающегося магнитного поля являются:
пространственный сдвиг осей катушек статора;
временной сдвиг токов в катушках статора.
Первое требование удовлетворяется соответствующим расположением намагничивающих катушек на магнитопроводе статора. Оси фаз обмотки смещены в пространстве на угол 120°. Второе условие обеспечивается подачей на катушки статора трехфазной системы напряжений.
При включении двигателя в трехфазную сеть в обмотке статора устанавливается система токов одинаковой частоты и амплитуды, периодические изменения которых относительно друг друга совершаются с запаздыванием на 1/3 периода.
Токи фаз обмотки создают магнитное поле, вращающееся относительно статора с частотой , об/мин, которая называется синхронной частотой вращения двигателя:
где — частота тока сети, Гц,
р – число пар полюсов магнитного поля.
При стандартной частоте тока сети
, частота вращения поля
, об/мин |
Вращаясь, поле пересекает проводники ротора, наводя в них ЭДС. При замкнутой обмотке ротора ЭДС вызывает токи, при взаимодействии которых с вращающимся магнитным полем возникает вращающий электромагнитный момент. Скорость вращения ротора в двигательном режиме асинхронной машины всегда меньше скорости вращения поля, т.е. ротор “отстает” от вращающегося поля. Только при этом условии в проводниках ротора наводится ЭДС, протекает ток и создается вращающий момент. Явление отставания ротора от магнитного поля называется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения:
где n– частота вращения ротора, об/мин.
Для асинхронных двигателей скольжение может изменяться в пределах от 1 (пуск) до величины, близкой к 0 (холостой ход).
2 ) Пуск асинхронных двигателей.
При пуске двигателя должны выполнятся следующие требования:
1. Малая величина пускового тока;
2. Достаточный по величине пусковой момент;
3. Плавное нарастание скорости;
4. Простота и экономичность пуска.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска.
Для двигателей с короткозамнутым ротором используют прямой пуск и пуск при пониженном напряжении.
1. Прямой пуск. При этом обмотка статора включается непосредственно в сеть на полное напряжение. Прямой пуск допустим только для асинхронных двигателей с короткозамкнутым ротором малой и средней мощности (до 15-20 кВт). Однако при значительной мощности питающей сети этот способ можно распространить на двигатели большей мощности (примерно до 50 кВт).
2. Пуск при пониженном напряжении . Пусковой ток двигателя пропорционален напряжению на фазах обмотки статора, поэтому уменьшение напряжениясопровождается соответствующим уменьшением пускового тока. Однако такой способ приводит к уменьшению начального пускового момента, который пропорционален квадрату напряжения на фазах обмотки статора. Ввиду значительного снижения пускового момента указанный способ пуска применим только при малых нагрузках на валу.
Имеется несколько способов понижения напряжения в момент пуска:
а) при легком пуске асинхронных двигателей средней мощности, которые нормально работают при соединении фаз обмотки статора треугольником, применяют снижение напряжения на зажимах этих фаз переключением их в звезду;
б) при любом типе соединения фаз обмотки статора понизить напряжение можно с помощью реактора (трехфазной индуктивной катушки), включенного последовательно в обмотку статора. Менее экономично снижать напряжение на статоре последовательным включением резисторов, т.к. они при этом сильно нагреваются и возникают дополнительные потери эле
Чем отличается фазный двигатель от короткозамкнутого
Наибольшее распространение в промышленности получили дешевые, простые в изготовлении и обслуживании, долговечные трехфазные асинхронные двигатели. Все трехфазные асинхронные двигатели имеют конструктивно одинаковые статоры и различаются выполнением обмотки ротора. По конструкции обмотки ротора эти двигатели подразделяются на два типа: с короткозамкнутой обмоткой и с фазной обмоткой.
Трехфазный двигатель предназначен для включения в трехфазную сеть, поэтому он должен иметь обмотку статора, состоящую из трех фазных обмоток, при прохождении через которые токи, поступающие из трехфазной сети, возбуждают вращающееся магнитное поле. Для усиления магнитного поля и придания ему необходимой формы сердечник статора и ротора выполняют из электрической стали. Сердечник имеет вид полого цилиндра с продольными пазами по внутренней поверхности. В пазы укладываются три одинаковые фазные обмотки, сдвинутые друг относительно друга на угол 120.
Короткозамкнутый ротор состоит из стального вала, цилиндрического сердечника, насаженного на вал ротора, короткозамкнутой обмотки и лопастей, осуществляющих вентиляцию машины. Следует отметить, что обмотка короткозамкнутого ротора не изолируется от сердечника из-за того, что между удельными сопротивлениями обмотки и стали сердечника имеется значительная разница и индуцированные в обмотке токи замыкаются в основном по ее стержням и торцовым кольцам.
В асинхронных двигателях средней и малой мощности короткозамкнутую обмотку ротора получают путем заливки расплавленного алюминиевого сплава в продольные пазы сердечника. Вместе с обмоткой также вставляют торцовые короткозамыкающие кольца и лопасти для вентиляции машины.
У двигателей с фазным ротором в продольные пазы сердечника ротора укладывают три одинаковые изолированные обмотки, в пространстве на 120 градусов, причем концы фаз объединены в общую точку, образуя звезду, а начала присоединены к трем контактным кольцам, размещенным на валу. С увеличением активного сопротивления обмотки ротора уменьшается пусковой ток, т.е. облегчается пуск двигателя. Также можно регулировать частоту вращения двигателя, изменяя активное сопротивление с помощью реостата. Все это позволяет применять двигатели с фазным ротором для привода машин, требующих больших пусковых моментов.
По конструктивному выполнению двигатели с короткозамкнутым ротором проще двигателей с контактными кольцами. Они более надежны в работе, однако имеют сравнительно небольшой пусковой момент. Поэтому их применяют для привода машин, для которых не требуются большие пусковые моменты, а также машин и механизмов небольшой мощности. Асинхронные двигатели малой мощности и микродвигатели выполняют также с короткозамкнутыми роторами.
51. Принцип действия асинхронного двигателя
В обмотке статора асинхронного двигателя при прохождении переменного тока возбуждается вращающееся магнитное поле, которое, пересекая проводники обмотки ротора, наводит в них переменную э.д.с. Так как обмотка ротора замкнута, то наведенная э.д.с. вызывает в роторе ток. В результате взаимодействия проводников с током ротора и вращающегося магнитного поля возникает сила, заставляющая ротор вращаться в направлении вращения поля. Таким образом, принцип работы асинхронного двигателя основан на использвании взаимодействия вращающегося магнитного поля, создаваемого переменным током в обмотке статора и проводниками с током обмотки ротора. Т.к. вращение магнитного поля статора происходит асинхронно с вращением ротора двигателя, т.е. частоты вращения ротора и поля отличны, двигатель называют асинхронным.
На рисунке 12.8 схематически показан северный полюс вращающегося магнитного поля, который перемещается по ходу часовой стрелки с частотой вращения n (об/с). Допустим, в начальный момент ротор неподвижен и под северным полюсом находится один из проводников обмотки ротора. Движение полюса по часовой стрелке относительно этого проводника равносильно движению проводника при неподвижном полюсе против часовой стрелки. При таком направлении движения полюса, согласно правилу правой руки, наведенный в проводнике обмотки ротора ток направлен к читателю. По правилу левой руки находим, что на проводник ротора с током заданного направления дествует электромагнитная сила F, которая направлена в сторону вращения магнитного поля.
При пуске асинхронного двигателя по мере разбега ротора разность частот вращающегося поля и ротора уменьшается. Однако ротор не может вращаться синхронно с полем, в нем не будет наводиться ток и, следовательно, исчезнет вращающий момент. В асинхронном двигателе частота вращения ротора меньше частоты вращения поля и ротор как бы скользит вдоль поля.Отношение разности частот вращзения поля n и ротора n к частоте вращения поля называют скольжением: s = (n – n)/n, откуда n = (1 – s) n0.
Часто скольжение выражают в процентах: s = [(n – n)/n]*100
Скольжение с изменением нагрузки двигателя изменяется. Обычно у асинхронных двигателей нормального исполнения при номинальной нагрузке напряжение составляет 1-6% . При неподвижном роторе s =1, при синхронной скорости s = 0. Если частоту вращения ротора увеличить до частоты выше синхронной, то асинхронная машина перейдет в генераторный режим.При генераторном режиме изменит направление электромагнитный момент М, который станет тормозящим, причем при этом асинхронная машина, получая механгическую энергию от первичного двигателя, превращает ее в электрическую, отдавая затем в сеть.Если ротор асинхронного двигателя затормозить, а затем вращать его в сторону, противоположную направлению вращения поля, то асинхронная машина перейдет в режим электромагнитного торможения, так как электромагнитный момент М направлен против вращения ротора и тормозит его. Итак, характерной особенностью АМ является наличие скольжения (n≠n). На практике АМ в основном используют в двигательном режиме. В двигательном режиме за время одного периода Т вращающееся поле перемещается вдоль воздушного зазора (зазор между внутренней поверхностью статора и внешней поверхности ротора) на расстояние, равное части дуги внутренней окружности сердечника статора, приходящейся на пару полюсов, т.е. на расстояние двух полюсных делений.
58. ХАРАКТЕРИСТИКИ ГЕНЕРАТОРА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Характеристика холостого хода.
Характеристика холостого хода представляет собой зависимость ЭДС на выводах генератора Е от тока возбуждения Iв при разомкнутой цепи якоря . Несовпадение кривых, полученных при увеличении и уменьшении тока возбуждения, объясняется наличием гистерезиса в стали, из которой выполнена магнитная система машины. Для практических целей обычно ограничиваются снятием части петли, которую получают, уменьшая ток Iв от максимального значения до нуля. При снятии характеристики холостого хода следует обращать внимание на то, чтобы ток возбуждения изменялся в одном направлении (или только увеличивался, или только уменьшался), так как в противном случае будет большой разброс точек из-за того, что они будут ложиться на разные гистерезисные кривые. В начальной части характеристики холостого хода ЭДС изменяется пропорционально току возбуждения, а затем рост ЭДС замедляется, что объясняется насыщением стальных участков магнитной цепи. Практическое значение характеристики холостого хода заключается в том, что по ней можно судить о степени насыщения магнитной цепи машины. Кроме того, эта характеристика необходима для построения других характеристик машины.
Эта характеристика представляет собой зависимость напряжения на выводах машины U от тока возбуждения Iв при условии, что ток в цепи-якоря Iа поддерживается неизменным. Практическое значение нагрузочной характеристики состоит в том, что она позволяет количественно определить размагничивающее действие реакции якоря и исследовать зависимость этой реакции от насыщения магнитной цепи машины и тока якоря. Можно снять ряд нагрузочных характеристик для различных значений тока Iа. Если снимается одна нагрузочная характеристика, то чаще всего принимают, что Iа = Iном. Ток возбуждения изменяют в сторону уменьшения, начиная от максимального его значения.
Нагрузочная характеристика располагается ниже характеристики холостого хода из-за падения напряжения в цепи якоря и размагничивающего действия реакции якоря, уменьшающей магнитный поток и ЭДС машины.
Эта характеристика является основной эксплуатационной характеристикой генератора. Она показывает, как изменяется напряжение на выводах машины U при возрастании тока Нагрузки I=Iа, если при этом на цепь возбуждения не оказывается никакого воздействия. Для генератора независимого возбуждения внешняя характеристика U=f(I) снимается при Iв =const.Исходной точкой для снятия внешней характеристики является точка, когда при номинальном токе нагрузки I=Iном на выходах генератора установлено номинальное напряжение Uном. Ток возбуждения, соответствующий U=Uном при I=Iном, называется номинальным током возбуждения Iв,ном. В процессе снятия внешней характеристики этот ток поддерживается постоянным. Начиная от исходной точки ток нагрузки постепенно уменьшается до нуля. По внешней характеристике определяют изменение напряжения ΔU Обычно его выражают в процентах номинального напряжения:
Как следует из рассмотрения внешних характеристик генератора независимого возбуждения, при Iв=const напряжение на выводах генератора с изменением нагрузки не остается постоянным. Для того чтобы сохранить напряжение неизменным, необходимо регулировать ток возбуждения. Закон регулирования тока возбуждения с целью сохранения постоянства напряжения при изменении нагрузки дает регулировочная характеристика, представляющая собой зависимость Iв= f(I) при U=Uном=const. Начинают снимать ее в режиме холостого хода, когда I = 0. При увеличении тока нагрузки ток возбуждения Iв необходимо несколько увеличить, чтобы скомпенсировать уменьшение напряжения из-за падения напряжения и размагничивающего действия реакции якоря.
52. Схема замещения асинхронного двигателя
Для анализа работы асинхронного двигателя пользуются схемой замещения.
Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и представляет собой электрическую схему, в которой вторичная цепь (обмотка ротора) соединена с первичной цепью (обмоткой статора) гальванически вместо магнитной связи, существующей в двигателе.
Основное отличие асинхронного двигателя от трансформатора в электрическом отношении состоит в следующем. Если в трансформаторе энергия,переданная переменным магнитным полем во вторичную цепь, поступает к потребителю в виде электрической энергии, то в асинхронном двигателе энергия, переданная вращающимся магнитным полем ротору, преобразуется в механическую и отдается валом двигателя потребителю в виде механической энергии.
Электромагнитные мощности, передаваемые магнитным полем во вторичную цепь трансформатора и ротору двигателя, имеют одинаковые выражения:
В трансформаторе электромагнитная мощность за вычетом потерь во вторичной обмотке поступает потребителю:
Р2 = Рэм – 3I22 r2 = 3U2 I2 cos?2 = 3I22 rП = 3I ‘ 22 r’ П,
где rП – сопротивление потребителя.
В асинхронном двигателе электромагнитная мощность за вычетом потерь в обмотке ротора превращается в механическую мощность:
Р2 = Рмех = Рэм – 3I22 r2 = Pэм – 3I’22 r’2
Pмех = [3 I22 r2 (1–s)]/s = 3I’22 r’2 (1–s)]/s = 3I22 r’э = 3I’22 r’э
Сравнивая выражения можно заключить, что r’П = r’э .
Таким образом, потери мощности в сопротивлении численно равны механической мощности, развиваемой двигателем.
Заменив в схеме замещения трансформатора сопротивление нагрузки r’П на r’э = [r’2 (1–s)]/s, получим схему замещения асинхронного двигателя. Все остальные элементы схемы аналогичны соответствующим элементам схемы замещения трансформатора: r1, x1 – активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки ротора.
Приведенные значения определяются так же, как и для трансформатора:
r’2 = r2 k2 , x’2 = x2 k2,
где k = E1 /E2k = U1ф /E2k – коэффициент трансформации двигателя.
Может возникнуть сомнение в возможности использования гальванической связи цепей статора и ротора в схеме замещения, поскольку частоты в этих цепях на первый не одинаковы. Первая часть схемы замещения представляет собой эквивалентную схему фазы обмотки ротора, которая приведена к частоте тока статора. В реальном же двигателе в отличие от схемы замещения частоты
53. Механическая характеристика асинхронного двигателя
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы: n = f(M) или s = f(M).
Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма.
Уравнение механической характеристики асинхронного двигателя может быть получено на основании формулы Мэм = (3I22r2)/?0s и схемы замещения.
С помощью схемы замещения определяют приведенный ток фазы ротора:
I’2 = U1ф /?(r1 + r’2/s) + (x1 + x’2)2
где r’2/s = r’2 + r’2(1– s)/s
Полученное значение тока I’2 подставляют в уравнение момента, в котором предварительно I2 и r2 заменяют через их приведенные значения:
М = (3I22r2)/?0s = (3I’22r’2)/?0s
После подстановки получим
I’2 = 3U1ф2 r’2 / ?0s [(r1 + r’2/s) +(x1 + x’2)2]
Это выражение представляет собой уравнение механической характеристики, поскольку оно связывает момент и скольжение двигателя. Остальные входящие в уравнение величины: напряжение сети и параметры двигателя – постоянны и не зависят от s и M. Располагая параметрами двигателя, можно рассчитать и построить его механическую характеристику, которая будет иметь вид:
Однако необходимо отметить, что после включения двигателя в нем происходят сложные электромагнитные процессы. В тех случаях, когда время разбега оказывается соизмеримым с временем электромагнитных процессов, механическая характеристика двигателя будет существенно отличаться от статической.
Одной из важнейших точек арактеристики, представляющей интерес при анализе работы и выборе двигателя, является точка, где момент, развиваемый двигателем, достигает наибольшего значения. Эта точка имеет координаты nкр, sкр , Mmax .
После дифференцирования и последующих преобразований выражение sкр будет иметь следующий вид: sкр = ± r’2/?r12 + xк2, где xк = x1 + x’2
получим выражение максимальногомомента
Мmax = 3U1ф2 / 2?0s (r1 ± ?r12 + xк2)
Момент, развиваемый двигателем, при любом скольжении пропорционален квадрату напряжения. Максимальный момент пропорционален квадрату напряжения и не зависит от сопротивления цепи ротора. Критическое скольжение пропорционально сопротивлению цепи ротора и не зависит от напряжения сети.
В практике обычно пользуются уравнением механической характеристики, с помощью которой можно произвести необходимые расчеты и построения, используя только каталожные данные.
Активное сопротивление обмотки статора r1 значительно меньше остальных сопротивлений статора и ротора, и им обычно пренебрегают. Упрощенное уравнение механической характеристики
M = 2Mmax/(s/sкр + sкр /s)
Следует отметить, что в зоне от М = 0 до М = 0,9Мmax механическая характеристика близка к прямой линии. Поэтому, например, при расчетах пусковых и регулировочных резисторов эту часть механической характеристики принимают за прямую линию, проходящую через точки M = 0, n = 0 и Mном, nном. Уравнение механической характеристики в этой части будет иметь вид
M = s Mном / sном
53. Электромагнитный момент асинхронного двигателя
Основной конечной величиной характеризующей электромеханическое преобразование является электромагнитный момент на валу. Он образуется в результате взаимодействия магнитного поля и тока, протекающего в обмотках статора или ротора, и может быть представлен как векторное произведение
где – zp число пар полюсов машины. Можно также представить его в виде –В выражениях физический смысл имеет только модуль вектора электромагнитного момента и его можно определить через проекции векторов сомножителей. Для произвольных векторовa и b модуль векторного произведения равен разности скалярных произведений проекций векторов на ортогональные оси координат, т.е. –
Поэтому любое из выражений позволяет найти модуль электромагнитного момента |m|=m, выразив входящие в него векторы через их проекции на координатные оси m-n. Например, электромагнитный момент определяется через произведение потокосцепления ротора на ток ротора в виде

Широкое распространение асинхронного электродвигателя (АД) вызвано его надежностью и простотой конструкции. Статор такого двигателя стандартный, представляет собой изготовленный из пластин электростатической стали полый цилиндр с трехфазной обмоткой. Ротор же может быть короткозамкнутым и фазным. Последний вариант получил более широкое распространение по ряду причин, хотя его конструкция намного сложнее, чем у короткозамкнутого ротора.
Конструкция фазного ротора
Фазный ротор АД конструктивно напоминает его статор. Основа ротора набирается из пластин электростатической стали, которые насаживаются на вал. Конструкция имеет продольные пазы, в которые укладываются витки катушек фазной обмотки. Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
В зависимости от напряжения сети, фазы обмотки соединяются “треугольником” или “звездой”. Оси катушек двухполюсного электродвигателя смещены на 120 градусов относительно друг друга.
Контактные кольца изготавливаются из латуни или стали. На вал они посажены с обязательной изоляцией между собой. Щетки расположены на щеткодержатле, изготовлены из металлографита, к кольцам прижимаются посредством пружин.
Зачем нужно добавочное сопротивление?
Добавочное сопротивление служит для запуска двигателя с нагрузкой на его валу. Как только достигаются номинальные обороты вала, сопротивление отключается за ненадобность, а кольца закорачиваются. В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
Роль добавочного внешнего сопротивления, как правило, выполняет ступенчатый реостат. В этом случае двигатель будет разгонятся тоже ступенчато. Часто используются устройства, способные поднять КПД двигателя, при этом избавляя щетки от излишнего трения о кольца. После разгона устройство поднимает щетки и замыкает кольца.
Для реализации автоматического пуска электродвигателя используется подключенная индуктивность к обмотке ротора. Дело в том, что в тот момент, когда осуществляется пуск, в роторе показатели индуктивности и частоты тока максимальны. При разгоне двигателя эти показатели падают, а в конечном итоге двигатель выходит на нормальный рабочий режим.
Отличие короткозамкнутого ротора от фазного
В короткозамкнутом роторе электродвигателя, в отличие от фазного варианта, нет обмоток. Их заменяют замкнутые с торцов между собой кольцами стержни, изготовленные из алюминия или меди. Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название — “беличья клетка”.
Короткозамкнутый ротор приводится во вращение за счет наведения тока магнитным полем статора. Чтобы исключить пульсирование магнитного поля в роторе, стержни “беличьей клетки” располагаются параллельно между собой, но под наклоном относительно оси вращения. АД с короткозамкнутым ротором обладают высокой надежностью за счет отсутствия щеток, которые со временем перетираются. Кроме того, их стоимость меньше, чем у вариантов с фазным ротором.
Преимущества и недостатки электродвигателя с фазным ротором
Широкое распространение АД с фазным ротором получил за счет ряда серьезных преимуществ перед другими машинами подобного рода. Среди них следует отметить большой вращающий момент при запуске, а также относительно постоянную скорость вращения даже при высоких нагрузках. Такие электродвигатели для запуска требуют меньший пусковой ток, а конструкция позволяет использовать автоматические пусковые устройства. Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Как и любой электрический механизм, электродвигатели с фазным ротором имеют ряд недостатков:
- Чувствительность к перепадам напряжения;
- Большие габаритные размеры
- Высокая стоимость;;
- Более сложная конструкция за счет цепи ротора с добавочным сопротивлением;
- Меньшие показатели коэффициента мощности и КПД (относительно АД с короткозамкнутым ротором).
Область применения электродвигателей с фазным ротором
Ад с фазным ротором, за счет высокого крутящего момента, низких пусковых токов и способности долговременно работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в широких диапазонах. Кроме того, эти машины отлично приспособлены под пуск с нагрузкой на валу.
За счет высокой производительности, наиболее часто АД с фазным ротором используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках. Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Проверка электродвигателя с фазным ротором
Для проверки обмоток статора трехфазного АД на целостность, необходимо добраться до клемм их подключения. Затем нужно произвести замеры сопротивлений между фазными клеммами по отдельности, предварительно сняв перемычки. Если сопротивление какой-либо обмотки меньше, чем у других, это свидетельствует о замыкании между ее витками. В этом случае двигатель отдается на перемотку.
Для проверки обмоток ротора, необходимо отыскать выводы от контактных колец. Затем нужно убедиться, что сопротивления обмоток совпадают. Если конструкция электродвигателя предусматривает наличие системы отключения обмоток ротора, отсутствие контакта может быть обусловлено именно поломкой данного механизма, а не обрывом витков.
О наличие какой-либо неисправности АД могут свидетельствовать следующие факторы:
- Снижение скорости вращения при нагрузке. Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети
- Разворачивание АД, когда цепь ротора разомкнута – КЗ в обмотке ротора
- Чрезмерное равномерное повышение температуры двигателя – длительная перегрузка АД или его недостаточное охлаждение
- Нагрев статорной обмотки местного характера – двойное замыкание катушек статора на корпус или между фазами, КЗ между витками, неверное подключение катушек в фазе между собой
- Нагрев стали статора местного характера – нарушение изоляции между листами стали, их оплавление и выгорание, замыкание
- Посторонний шум при работе АД. Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
- Перегорание в обмотке якоря предохранителей, отсутствие контакта в подводящей проводке, выход из строя реостата
Для самостоятельной диагностики и исправления неисправностей электродвигателя необходимыми являются хотя-бы минимальные познания в устройстве АД и электрических цепях в целом. Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.

Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство

На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.

Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой«. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.

Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье — асинхронный двигатель с фазным ротором.

Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s — это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении. 
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
50. Уустройство асинхронного двигателя (ад) фазный и короткозамкнутый ротор
Наибольшее распространение в промышленности получили дешевые, простые в изготовлении и обслуживании, долговечные трехфазные асинхронные двигатели. Все трехфазные асинхронные двигатели имеют конструктивно одинаковые статоры и различаются выполнением обмотки ротора. По конструкции обмотки ротора эти двигатели подразделяются на два типа: с короткозамкнутой обмоткой и с фазной обмоткой.
Трехфазный двигатель предназначен для включения в трехфазную сеть, поэтому он должен иметь обмотку статора, состоящую из трех фазных обмоток, при прохождении через которые токи, поступающие из трехфазной сети, возбуждают вращающееся магнитное поле. Для усиления магнитного поля и придания ему необходимой формы сердечник статора и ротора выполняют из электрической стали. Сердечник имеет вид полого цилиндра с продольными пазами по внутренней поверхности. В пазы укладываются три одинаковые фазные обмотки, сдвинутые друг относительно друга на угол 120.
К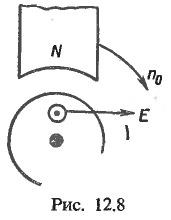 ороткозамкнутый
ротор состоит из стального вала,
цилиндрического сердечника, насаженного
на вал ротора, короткозамкнутой обмотки
и лопастей, осуществляющих вентиляцию
машины. Следует отметить, что обмотка
короткозамкнутого ротора не изолируется
от сердечника из-за того, что между
удельными сопротивлениями обмотки и
стали сердечника имеется значительная
разница и индуцированные в обмотке токи
замыкаются в основном по ее стержням и
торцовым кольцам.
ороткозамкнутый
ротор состоит из стального вала,
цилиндрического сердечника, насаженного
на вал ротора, короткозамкнутой обмотки
и лопастей, осуществляющих вентиляцию
машины. Следует отметить, что обмотка
короткозамкнутого ротора не изолируется
от сердечника из-за того, что между
удельными сопротивлениями обмотки и
стали сердечника имеется значительная
разница и индуцированные в обмотке токи
замыкаются в основном по ее стержням и
торцовым кольцам.
В асинхронных двигателях средней и малой мощности короткозамкнутую обмотку ротора получают путем заливки расплавленного алюминиевого сплава в продольные пазы сердечника. Вместе с обмоткой также вставляют торцовые короткозамыкающие кольца и лопасти для вентиляции машины.
У двигателей с фазным ротором в продольные пазы сердечника ротора укладывают три одинаковые изолированные обмотки, в пространстве на 120 градусов, причем концы фаз объединены в общую точку, образуя звезду, а начала присоединены к трем контактным кольцам, размещенным на валу. С увеличением активного сопротивления обмотки ротора уменьшается пусковой ток, т.е. облегчается пуск двигателя. Также можно регулировать частоту вращения двигателя, изменяя активное сопротивление с помощью реостата. Все это позволяет применять двигатели с фазным ротором для привода машин, требующих больших пусковых моментов.
По конструктивному выполнению двигатели с короткозамкнутым ротором проще двигателей с контактными кольцами. Они более надежны в работе, однако имеют сравнительно небольшой пусковой момент. Поэтому их применяют для привода машин, для которых не требуются большие пусковые моменты, а также машин и механизмов небольшой мощности. Асинхронные двигатели малой мощности и микродвигатели выполняют также с короткозамкнутыми роторами.
51. Принцип действия асинхронного двигателя
В обмотке статора асинхронного двигателя при прохождении переменного тока возбуждается вращающееся магнитное поле, которое, пересекая проводники обмотки ротора, наводит в них переменную э.д.с. Так как обмотка ротора замкнута, то наведенная э.д.с. вызывает в роторе ток. В результате взаимодействия проводников с током ротора и вращающегося магнитного поля возникает сила, заставляющая ротор вращаться в направлении вращения поля. Таким образом, принцип работы асинхронного двигателя основан на использвании взаимодействия вращающегося магнитного поля, создаваемого переменным током в обмотке статора и проводниками с током обмотки ротора. Т.к. вращение магнитного поля статора происходит асинхронно с вращением ротора двигателя, т.е. частоты вращения ротора и поля отличны, двигатель называют асинхронным.
На рисунке 12.8 схематически показан северный полюс вращающегося магнитного поля, который перемещается по ходу часовой стрелки с частотой вращения n0 (об/с). Допустим, в начальный момент ротор неподвижен и под северным полюсом находится один из проводников обмотки ротора. Движение полюса по часовой стрелке относительно этого проводника равносильно движению проводника при неподвижном полюсе против часовой стрелки. При таком направлении движения полюса, согласно правилу правой руки, наведенный в проводнике обмотки ротора ток направлен к читателю. По правилу левой руки находим, что на проводник ротора с током заданного направления дествует электромагнитная сила F, которая направлена в сторону вращения магнитного поля.
При пуске асинхронного двигателя по мере разбега ротора разность частот вращающегося поля и ротора уменьшается. Однако ротор не может вращаться синхронно с полем, в нем не будет наводиться ток и, следовательно, исчезнет вращающий момент. В асинхронном двигателе частота вращения ротора меньше частоты вращения поля и ротор как бы скользит вдоль поля.Отношение разности частот вращзения поля n0 и ротора n к частоте вращения поля называют скольжением: s = (n0 – n)/n0, откуда n = (1 – s) n0.
Часто скольжение выражают в процентах: s = [(n0 – n)/n0]*100
Скольжение с изменением нагрузки двигателя изменяется. Обычно у асинхронных двигателей нормального исполнения при номинальной нагрузке напряжение составляет 1-6% . При неподвижном роторе s =1, при синхронной скорости s = 0. Если частоту вращения ротора увеличить до частоты выше синхронной, то асинхронная машина перейдет в генераторный режим.При генераторном режиме изменит направление электромагнитный момент М, который станет тормозящим, причем при этом асинхронная машина, получая механгическую энергию от первичного двигателя, превращает ее в электрическую, отдавая затем в сеть.Если ротор асинхронного двигателя затормозить, а затем вращать его в сторону, противоположную направлению вращения поля, то асинхронная машина перейдет в режим электромагнитного торможения, так как электромагнитный момент М направлен против вращения ротора и тормозит его. Итак, характерной особенностью АМ является наличие скольжения (n0≠n). На практике АМ в основном используют в двигательном режиме. В двигательном режиме за время одного периода Т вращающееся поле перемещается вдоль воздушного зазора (зазор между внутренней поверхностью статора и внешней поверхности ротора) на расстояние, равное части дуги внутренней окружности сердечника статора, приходящейся на пару полюсов, т.е. на расстояние двух полюсных делений.
58. ХАРАКТЕРИСТИКИ ГЕНЕРАТОРА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Характеристика холостого хода.
Характеристика холостого хода представляет собой зависимость ЭДС на выводах генератора Е от тока возбуждения Iв при разомкнутой цепи якоря . Несовпадение кривых, полученных при увеличении и уменьшении тока возбуждения, объясняется наличием гистерезиса в стали, из которой выполнена магнитная система машины. Для практических целей обычно ограничиваются снятием части петли, которую получают, уменьшая ток Iв от максимального значения до нуля. При снятии характеристики холостого хода следует обращать внимание на то, чтобы ток возбуждения изменялся в одном направлении (или только увеличивался, или только уменьшался), так как в противном случае будет большой разброс точек из-за того, что они будут ложиться на разные гистерезисные кривые. В начальной части характеристики холостого хода ЭДС изменяется пропорционально току возбуждения, а затем рост ЭДС замедляется, что объясняется насыщением стальных участков магнитной цепи. Практическое значение характеристики холостого хода заключается в том, что по ней можно судить о степени насыщения магнитной цепи машины. Кроме того, эта характеристика необходима для построения других характеристик машины.
Нагрузочная характеристика.
Эта характеристика представляет собой зависимость напряжения на выводах машины U от тока возбуждения Iв при условии, что ток в цепи-якоря Iа поддерживается неизменным. Практическое значение нагрузочной характеристики состоит в том, что она позволяет количественно определить размагничивающее действие реакции якоря и исследовать зависимость этой реакции от насыщения магнитной цепи машины и тока якоря. Можно снять ряд нагрузочных характеристик для различных значений тока Iа. Если снимается одна нагрузочная характеристика, то чаще всего принимают, что Iа = Iном. Ток возбуждения изменяют в сторону уменьшения, начиная от максимального его значения.
Нагрузочная характеристика располагается ниже характеристики холостого хода из-за падения напряжения в цепи якоря и размагничивающего действия реакции якоря, уменьшающей магнитный поток и ЭДС машины.
Внешняя характеристика.
Эта характеристика является основной эксплуатационной характеристикой генератора. Она показывает, как изменяется напряжение на выводах машины U при возрастании тока Нагрузки I=Iа, если при этом на цепь возбуждения не оказывается никакого воздействия. Для генератора независимого возбуждения внешняя характеристика U=f(I) снимается при Iв =const.Исходной точкой для снятия внешней характеристики является точка, когда при номинальном токе нагрузки I=Iном на выходах генератора установлено номинальное напряжение Uном. Ток возбуждения, соответствующий U=Uном при I=Iном, называется номинальным током возбуждения Iв,ном. В процессе снятия внешней характеристики этот ток поддерживается постоянным. Начиная от исходной точки ток нагрузки постепенно уменьшается до нуля. По внешней характеристике определяют изменение напряжения ΔU Обычно его выражают в процентах номинального напряжения:
ΔU %=( (U0.- Uном )/Uном)*100,
Регулировочная характеристика.
Как следует из рассмотрения внешних характеристик генератора независимого возбуждения, при Iв=const напряжение на выводах генератора с изменением нагрузки не остается постоянным. Для того чтобы сохранить напряжение неизменным, необходимо регулировать ток возбуждения. Закон регулирования тока возбуждения с целью сохранения постоянства напряжения при изменении нагрузки дает регулировочная характеристика, представляющая собой зависимость Iв = f(I) при U=Uном=const. Начинают снимать ее в режиме холостого хода, когда I = 0. При увеличении тока нагрузки ток возбуждения Iв необходимо несколько увеличить, чтобы скомпенсировать уменьшение напряжения из-за падения напряжения и размагничивающего действия реакции якоря.
52. Схема замещения асинхронного двигателя
Для анализа работы асинхронного двигателя пользуются схемой замещения.
Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и представляет собой электрическую схему, в которой вторичная цепь (обмотка ротора) соединена с первичной цепью (обмоткой статора) гальванически вместо магнитной связи, существующей в двигателе.
Основное отличие асинхронного двигателя от трансформатора в электрическом отношении состоит в следующем. Если в трансформаторе энергия,переданная переменным магнитным полем во вторичную цепь, поступает к потребителю в виде электрической энергии, то в асинхронном двигателе энергия, переданная вращающимся магнитным полем ротору, преобразуется в механическую и отдается валом двигателя потребителю в виде механической энергии.
Электромагнитные мощности, передаваемые магнитным полем во вторичную цепь трансформатора и ротору двигателя, имеют одинаковые выражения:
Рэм = Р1 – ?Р1.
В трансформаторе электромагнитная мощность за вычетом потерь во вторичной обмотке поступает потребителю:
Р2 = Рэм – 3I22 r2 = 3U2 I2 cos?2 = 3I22 rП = 3I ‘ 22 r’ П,
где rП – сопротивление потребителя.
В асинхронном двигателе электромагнитная мощность за вычетом потерь в обмотке ротора превращается в механическую мощность:
Р2 = Рмех = Рэм – 3I22 r2 = Pэм – 3I’22 r’2
Pмех = [3 I22 r2 (1–s)]/s = 3I’22 r’2 (1–s)]/s = 3I22 r’э = 3I’22 r’э
,
где r’э = [r’2 (1–s)]/s
Сравнивая выражения можно заключить, что r’П = r’э .
Таким образом, потери мощности в сопротивлении численно равны механической мощности, развиваемой двигателем.
Заменив в схеме замещения трансформатора сопротивление нагрузки r’П на r’э = [r’2 (1–s)]/s, получим схему замещения асинхронного двигателя. Все остальные элементы схемы аналогичны соответствующим элементам схемы замещения трансформатора: r1, x1 – активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки ротора.
Приведенные значения определяются так же, как и для трансформатора:
r’2 = r2 k2 , x’2 = x2 k2,
где k = E1 /E2k = U1ф /E2k – коэффициент трансформации двигателя.
Может возникнуть сомнение в возможности использования гальванической связи цепей статора и ротора в схеме замещения, поскольку частоты в этих цепях на первый не одинаковы. Первая часть схемы замещения представляет собой эквивалентную схему фазы обмотки ротора, которая приведена к частоте тока статора. В реальном же двигателе в отличие от схемы замещения частоты
53. Механическая характеристика асинхронного двигателя
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы: n = f(M) или s = f(M).
Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма.
Уравнение механической характеристики асинхронного двигателя может быть получено на основании формулы Мэм = (3I22r2)/?0s и схемы замещения.
С помощью схемы замещения определяют приведенный ток фазы ротора:
I’2 = U1ф /?(r1 + r’2/s) + (x1 + x’2)2
где r’2/s = r’2 + r’2(1– s)/s
Полученное значение тока I’2 подставляют в уравнение момента, в котором предварительно I2 и r2 заменяют через их приведенные значения:
М = (3I22r2)/?0s = (3I’22r’2)/?0s
После подстановки получим
I’2 = 3U1ф2 r’2 / ?0s [(r1 + r’2/s) +(x1 + x’2)2]
Это выражение представляет собой уравнение механической характеристики, поскольку оно связывает момент и скольжение двигателя. Остальные входящие в уравнение величины: напряжение сети и параметры двигателя – постоянны и не зависят от s и M. Располагая параметрами двигателя, можно рассчитать и построить его механическую характеристику, которая будет иметь вид:
Однако необходимо отметить, что после включения двигателя в нем происходят сложные электромагнитные процессы. В тех случаях, когда время разбега оказывается соизмеримым с временем электромагнитных процессов, механическая характеристика двигателя будет существенно отличаться от статической.
Одной из важнейших точек арактеристики, представляющей интерес при анализе работы и выборе двигателя, является точка, где момент, развиваемый двигателем, достигает наибольшего значения. Эта точка имеет координаты nкр, sкр , Mmax .
После дифференцирования и последующих преобразований выражение sкр будет иметь следующий вид: sкр = ± r’2/?r12 + xк2, где xк = x1 + x’2
получим выражение максимальногомомента
Мmax = 3U1ф2 / 2?0s (r1 ± ?r12 + xк2)
Момент, развиваемый двигателем, при любом скольжении пропорционален квадрату напряжения. Максимальный момент пропорционален квадрату напряжения и не зависит от сопротивления цепи ротора. Критическое скольжение пропорционально сопротивлению цепи ротора и не зависит от напряжения сети.
В практике обычно пользуются уравнением механической характеристики, с помощью которой можно произвести необходимые расчеты и построения, используя только каталожные данные.
Активное сопротивление обмотки статора r1 значительно меньше остальных сопротивлений статора и ротора, и им обычно пренебрегают. Упрощенное уравнение механической характеристики
M = 2Mmax/(s/sкр + sкр /s)
Следует отметить, что в зоне от М = 0 до М = 0,9Мmax механическая характеристика близка к прямой линии. Поэтому, например, при расчетах пусковых и регулировочных резисторов эту часть механической характеристики принимают за прямую линию, проходящую через точки M = 0, n = 0 и Mном, nном. Уравнение механической характеристики в этой части будет иметь вид
M = s Mном / sном
53. Электромагнитный момент асинхронного двигателя
Основной конечной величиной характеризующей электромеханическое преобразование является электромагнитный момент на валу. Он образуется в результате взаимодействия магнитного поля и тока, протекающего в обмотках статора или ротора, и может быть представлен как векторное произведение

где – zp число пар полюсов машины. Можно также
представить его в виде – В выражениях физический смысл имеет
только модуль вектора электромагнитного
момента и его можно определить через
проекции векторов сомножителей. Для
произвольных векторовa и b модуль векторного произведения равен
разности скалярных произведений проекций
векторов на ортогональные оси координат,
т.е. –
В выражениях физический смысл имеет
только модуль вектора электромагнитного
момента и его можно определить через
проекции векторов сомножителей. Для
произвольных векторовa и b модуль векторного произведения равен
разности скалярных произведений проекций
векторов на ортогональные оси координат,
т.е. –

Поэтому любое из выражений позволяет найти модуль электромагнитного момента |m|=m, выразив входящие в него векторы через их проекции на координатные оси m-n. Например, электромагнитный момент определяется через произведение потокосцепления ротора на ток ротора в виде

Bottom of Form
54. Способы регулирования частоты вращения асинхронного двигателя
Из выражения для угловой частоты вращения АД:
следует, что существует три способа регулирования скорости:
— изменением числа пар полюсов p;
— изменением скольжения S;
— изменением
частоты питающей сети  .
.
Для регулирования скорости изменением числа пар полюсов используются специальные многоскоростные АД с короткозамкнутым ротором. Изменение числа пар полюсов достигается за счет коммутации составных частей обмотки статора. Зная характер нагрузки, можно выбрать такую схему включения обмоток, которая обеспечит требуемые скорость и максимальный момент АД. Нижний предел диапазона регулирования составляет обычно 500 об/мин. Количество пар полюсов может быть равно только целому числу, поэтому данный способ регулирования скорости является ступенчатым. С энергетической точки зрения способ является экономичным, однако необходимость секционирования обмоток ухудшает массогабаритные показатели и повышает стоимость самого двигателя.
Р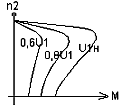 егулирование
скорости изменением скольжения
предполагает изменение жесткости
механической характеристики АД при
неизменной частоте
егулирование
скорости изменением скольжения
предполагает изменение жесткости
механической характеристики АД при
неизменной частоте .
Для АД с короткозамкнутым ротором этот
способ реализуется изменением величины
напряжения, подводимого к двигателю.
.
Для АД с короткозамкнутым ротором этот
способ реализуется изменением величины
напряжения, подводимого к двигателю.
На рисунке 1.1
приведены механические характеристики
АД при регулировании напряжения, которые
наглядно иллюстрируют особенности
данного способа. Регулирование скорости
осуществляется вниз от синхронной
скорости  ,
при этом растет скольжение, существенно
снижаются максимальный момент и
перегрузочная способность АД. Кроме
того, с ростом скольжения пропорционально
растут потери в цепи ротора. Поэтому
применение данного способа ограничивается
электроприводом малой мощности с
небольшим диапазоном регулирования.
Частотное регулирование АД осуществляют
изменением частоты напряжения подводимого
к статору. Этот способ обеспечивает
плавное регулирование
,
при этом растет скольжение, существенно
снижаются максимальный момент и
перегрузочная способность АД. Кроме
того, с ростом скольжения пропорционально
растут потери в цепи ротора. Поэтому
применение данного способа ограничивается
электроприводом малой мощности с
небольшим диапазоном регулирования.
Частотное регулирование АД осуществляют
изменением частоты напряжения подводимого
к статору. Этот способ обеспечивает
плавное регулирование
скорости в широком диапазоне с хорошими энергетическими характеристиками. Возможность регулирования темпа изменения частоты позволяет обеспечить оптимальные режимы частотного пуска и торможения АД.
Технически частотное регулирование осуществляют посредством полупроводниковых преобразователей частоты (ПЧ) — устройств, преобразующих однофазное или трехфазное сетевое напряжение с частотой 50 Гц в переменное трехфазное напряжение с регулируемой частотой и величиной напряжения.
Конструкция трёхфазного асинхронного двигателя. Короткозамкнутый и фазный ротор
Трёхфазный асинхронный двигатель является наиболее широко используемым электродвигателем. Почти 80% механической мощности, которая используется в промышленном производстве, преобразуется из электрической мощности, через асинхронные трёхфазные двигатели. Это происходит по той простой причине, что эти двигатели дёшевы, просты и надёжны в эксплуатации и обслуживании. Они имеют хорошие эксплуатационные характеристики, в них отсутствует коллектор, а также они эффективны при регулировании скорости.
В трёхфазном асинхронном двигателе мощность передаётся от статора на обмотку ротора посредством индукции. Наименование «асинхронный» говорит о том, что скорость вращения магнитного поля и скорость ротора не синхронны, при работе в режиме двигателя ротор имеет меньшую скорость, чем скорость вращающегося магнитного поля статора.
Как и любой другой электрический двигатель, асинхронный двигатель имеет две основные части, а именно: ротор и статор.
- Статор. Как следует из названия – это неподвижная часть двигателя. На статоре расположены трёхфазные обмотки, а также клеммник, через который подаётся электрическая энергия.
- Ротор. Представляет собой вращающуюся часть асинхронного двигателя. Ротор соединён с механической нагрузкой через вал.
Ротор асинхронного двигателя
Ротор асинхронного двигателя может конструктивно отличатся по своему исполнению, он может быть следующих типов:
- Короткозамкнутый ротор (Squirrel cage rotor).
- Фазный ротор (Slip ring rotor or wound rotor or phase wound rotor).
В зависимости от типа используемой конструкции ротора, асинхронный трёхфазный двигатель классифицируется как:
- Асинхронный двигатель с короткозамкнутым ротором типа беличьей клетки (Squirrel cage induction motor).
- Асинхронный двигатель с фазным ротором (Slip ring induction motor or wound induction motor or phase wound induction motor).
Конструкция статора для обоих типов двигателя остаётся одной и той же.
Кроме основных частей, таких как статор и ротор, асинхронный двигатель имеет и другие не основные части, а именно:
- Вал для передачи крутящего момента от двигателя на механическую нагрузку. Этот вал изготавливается из стали.
- Подшипники для поддержки вращающегося вала.
- Вентилятор для создания охлаждения двигателя, так как при своей работе асинхронный двигатель выделяет тепло.
- Клеммник для подключения электропитания двигателя.
- Воздушный зазор между статором и ротором, который должен быть как можно меньше и, обычно, его величина колеблется от 0,4 мм до 4 мм.
Статор трёхфазного асинхронного двигателя
Статор асинхронного трёхфазного двигателя состоит из трёх основных частей:
- Корпус статора.
- Сердечник статора.
- Обмотка статора или обмотка возбуждения.
Корпус статора
Это внешняя, наружная часть статора, функция которого заключается в поддержке сердечника статора и обмоток возбуждения. Он действует как защитное покрытие, обеспечивает механическую прочность всех внутренних частей двигателя. Корпус изготавливается с помощью литья под давлением или из сварной стали. Он должен быть очень прочным и жёстким, потому как требуется обеспечить наименьшую величину воздушного зазора трёхфазного асинхронного двигателя. Более того, воздушный зазор должен быть равномерный между статором и ротором, иначе магнитное притяжение будет несбалансированно, что приведёт к низкой эффективности двигателя и его быстрому износу.
Сердечник статора
Основное назначение сердечника статора заключается в том, чтобы обеспечить чередующийся переменный магнитный поток в статоре. Сердечник статора является магнитопроводом. Для того, чтобы уменьшить потери от вихревых токов, сердечник статора изготавливают из тонких листов ламинированной электротехнической стали. Толщина таких листов, изготовленных с помощью штамповки, составляет 0,4 – 0,5 мм. Как правило, выбирается сталь с высоким содержанием кремния, который помогает уменьшить потери на гистерезис, происходящие при работе двигателя.
Все тонкие ламинированные листы собираются в пакет так, чтобы образовался цельный сердечник с пазами (слотами) для размещения в них обмотки возбуждения. Внешний вид собранного пакета напоминает кусок полой толстой трубы, во внутренней части которого проделаны параллельные борозды в виде отрезков.
Обмотка статора (обмотка возбуждения)
В трёхфазном асинхронном двигателе в сердечнике статора, в пазах (слотах), располагаются три обмотки возбуждения. По одной обмотке на каждую фазу питания. Эти обмотки между собой соединяются в трёхфазную цепь по типу или «звезда» (Star), или «треугольник» (Delta). Тип соединения зависит от характеристики подаваемого питания на обмотки статора.
Асинхронные двигатели с короткозамкнутым ротором позволяют выполнять запуск с помощью переключения «звезда-треугольник» (star-delta), тогда в рабочем режиме двигатель будет работать с подключением обмоток типа «треугольник». Такое переключение и такой режим работы имеет свои преимущества и недостатки, но гораздо чаще можно встретить прямой пуск асинхронного трёхфазного двигателя по типу подключения «звезда» (star).
В том случае, если подключается асинхронный двигатель с фазным ротором, в котором обмотка ротора выведена на контактные кольца и есть к ним доступ через клеммник, запуск двигателя осуществляется через вставку сопротивлений в обмотку ротора. В этом случае не только статор может иметь способы соединения обмоток, но и ротор может быть соединён по типу или «звезда», или «треугольник».
Обмотку статора называют обмоткой возбуждения потому, как именно через неё создаётся вращающееся магнитное поле, которое является причиной работы асинхронного двигателя.
Типы трёхфазных асинхронных двигателей
Существует два типа двигателей с различными конструкциями роторов, как было сказано об этом выше.
Трёхфазный асинхронный двигатель с короткозамкнутым ротором
Ротор короткозамкнутого асинхронного двигателя имеет цилиндрическую форму. На периферии ротора имеются пазы (слоты). Пазы параллельны друг другу и имеют скос относительно оси вращения ротора. В пазах ротора расположены проводники, которые являются обмоткой ротора и выполнены в виде алюминиевых, медных или латунных стержней. Скос проводников обмотки необходим, чтобы предотвратить магнитное запирание ротора и статора, что делает работу двигателя более гладкой и равномерной, без рывков и перегрузок.
По бокам, с торцов ротора расположены кольца, с которыми соединены проводники обмотки ротора. По внешнему виду такая конструкция обмотки похожа на беличье колесо. Так как обмотка ротора замкнута накоротко, это исключает возможность изменять сопротивление обмотки, потому как отсутствуют контактные кольца и щёточный механизм. В свою очередь такая конструкция ротора проста и надёжна, что позволяет широко использовать трёхфазные асинхронные двигатели с этим типом ротора.
Преимущества использования асинхронного двигателя с короткозамкнутым ротором
- Простота, надёжность и прочность конструкции.
- Отсутствие контактных колец и щёточного механизма значительно упрощает обслуживание двигателя.
Применение асинхронного двигателя с короткозамкнутым ротором
Используется в станках в металлорежущем и деревообрабатывающем оборудовании, в сверлильных станках, а также в вентиляторах, в токарном и фрезерном оборудовании.
Трёхфазный асинхронный двигатель с фазным ротором
В этом типе трёхфазного асинхронного двигателя ротор не имеет короткозамкнутой обмотки. Отсутствуют торцевые кольца, на которых проводники ротора соединяются накоротко. Ротор обычно имеет такое же количество пар полюсов, что и статор, но в отличии от статора его проводники имеют гораздо большее сечение. Концы проводников выводятся на контактные кольца, которые расположены на валу фазного ротора. Если оба конца проводников выведены на контактные кольца, то это позволяет соединять обмотку ротора по типу «звезды» (star) или «треугольника» (delta). В основном, с одной стороны контакты проводников фазного ротора соединяются вместе в общую точку, а противоположные концы выводятся на контактные кольца. В этом случае фазный ротор включается по типу «звезда» (star) и имеется возможность управлять сопротивлением обмотки ротора через коммутационную аппаратуру.
Контактные кольца фазного ротора соприкасаются со щётками, посредством которых осуществляется непрерывный контакт с обмоткой ротора. Щётки располагаются в щёточном механизме, они требуют дополнительного обслуживания, периодической замены по мере износа. Наличие подвижного контакта вызывает нежелательное искрение, которое сводят к минимальному значению, обеспечивая плотное прилегание щёток к контактным кольцам.
Подключение внешнего сопротивления в обмотку ротора используется для облегчения пуска двигателя и для контроля скорости двигателя. Чтобы обеспечить плавный пуск двигателя с фазным ротором, по мере пуска добавочное сопротивление в обмотке ротора уменьшают. Это происходит или плавно, или ступенчато, в зависимости от используемой пусковой аппаратуры. Когда двигатель войдёт в рабочий режим, обмотка ротора практически замкнута накоротко.
В ниже приведённой схеме показана схема включения и запуска трёхфазного асинхронного двигателя с фазным ротором.
Преимущества трёхфазного асинхронного двигателя с фазным ротором
- Он имеет высокий пусковой момент и низкий пусковой ток.
- Возможен контроль скорости вращения через дополнительные сопротивления в цепи фазного ротора.
Применение трёхфазного асинхронного двигателя с фазным ротором
Двигатель этого типа используется там, где требуется высокий пусковой момент. Например, это могут быть: подъёмные механизмы, краны, лифты, любое оборудование, в котором двигатель вынужден запускаться с высокой механической нагрузкой на валу. Кран, который держит подвешенный груз, или лифт, который нагружен, всё это повышенная нагрузка на вал ротора, что в свою очередь требует высокого пускового момента от двигателя. Включение обычного короткозамкнутого асинхронного двигателя при такой нагрузке приведёт к высоким пусковым токам, что неэкономично, потому как повышает требования к электросети и может вызвать поломку двигателя. Поэтому применение асинхронных двигателей с фазным ротором оправдано.
Дата: 25.01.2016
© Valentin Grigoryev (Валентин Григорьев)
Асинхронный двигатель с короткозамкнутым ротором — виды, принцип работы
Все электрические двигатели содержат две главные части, взаимодействующие друг с другом. Этими частями являются статор и ротор. Статор инициирует взаимодействие, и ротор отвечает на него своим вращением. Все электродвигатели классифицируются на основе того или иного принципа, обеспечивающего взаимодействие главных частей. Например, в движке статор подобно первичной обмотке трансформатора индуцирует во вторичной обмотке — роторе — электромагнитные процессы. Значит это — асинхронный электродвигатель.
Разновидности простейших движков-трансформаторов
Движки переменного тока могут быть синхронными. Схема получается проще, а мотор дешевле. Хотя все асинхронные двигатели содержат статор, аналогичный синхронной машине, конструкция ротора определяет их существенное отличие от них. Его не нужно намагничивать тем или иным способом, как это делается в синхронном движке. Несмотря на отличия моделей асинхронных машин, конструкция их ротора — это эквивалент короткозамкнутой вторичной обмотки.
Самый простой вариант — короткозамкнутый ротор. Его можно просто отлить из ферромагнитного материала и обработать надлежащим образом. Сплавы на основе железа проводят электрический ток и взаимодействуют с магнитным полем. Цельнометаллическая конструкция обладает следующими преимуществами:
- наиболее проста в изготовлении и по этой причине обладает минимальной себестоимостью;
- лучше всего переносит усилия, возникающие при работе двигателя;
- хорошо разгоняется из-за эффективного взаимодействия магнитных полей.
 Цельнометаллический вариант
Цельнометаллический вариантКак преодолеваются недостатки болванки
Однако вполне очевидно то, что такой короткозамкнутый ротор будет не лучшим проводником для токов, индуцируемых статором. Сплавы железа проводят электроток заметно хуже алюминия или меди. Кроме этого ведь неспроста магнитопроводы трансформаторов изготавливают из стальных пластин, а не из цилиндрических болванок. Вихревые токи нагревают литой металл и уменьшают общую эффективность электроустановки. Поэтому недостатки массивности конструкции из железного сплава конструктивно учитывает наиболее эффективный двигатель с короткозамкнутым ротором.
В таком электродвигателе используются алюминиевые или медные детали. Функции применительно к созданию магнитного поля и проводимости тока конструктивно разделяются. Для получения переменного магнитного поля с малыми потерями по аналогии с трансформаторами применяются тонкие изолированные пластины. Каждая из них содержит выемки и по форме эквивалентна поперечному сечению ротора. Ее материалом является трансформаторная сталь.
Как получается беличье колесо (клетка)
После того как пластины собраны, получается цилиндр с канавками. Они образованы выемками, в которые укладываются стержни из алюминия или меди. На торцы цилиндра надеваются пластины или кольца из такого же металла, что и стержни, концы которых крепятся к ним. Каждая пара диаметрально противоположных стержней, таким образом, создает короткозамкнутый виток. Его сопротивление индуцируемому току гораздо меньше, чем у железного сплава. Стержни с пластинами выглядят, как беличья клетка.
 Беличья клетка
Беличья клеткаПоэтому двигатель с короткозамкнутым ротором такой конструкции имеет меньше потерь и по этой причине широко распространен. Но сходство этого электромотора асинхронного электродвигателя короткозамкнутым ротором своим похожего на обычный нагруженный силовой трансформатор ограничено к применению в некоторых электросетях. Не каждая из них может выдержать большой пусковой ток. Если асинхронные электродвигатели с короткозамкнутым ротором будут стартовать одновременно, величина тока будет велика и сравнима с коротким замыканием.
В начале их пуска происходит процесс, аналогичный включению трансформатора с вторичной обмоткой, замкнутой накоротко. В этом начальном положении магнитное поле почти неподвижно, и в этой связи так называемое скольжение получается самым большим. Неподвижный короткозамкнутый ротор асинхронного двигателя создает при пуске наиболее мощное электромагнитное поле. Ведь он собран из листовой стали, отличающейся минимальными вихревыми потерями, а беличье колесо характеризуется минимальным электрическим сопротивлением.
Как ограничить пусковой ток
По этой причине асинхронный двигатель с короткозамкнутым ротором в некоторых сетях приходилось заменять движками другой конструкции. Конструктивно несложно сделать так, чтобы в одном и том же статоре применить и короткозамкнутый, и фазный ротор. Дело в том, что в установившемся режиме, когда обороты набраны, обе эти конструкции эквивалентны нагруженной вторичной обмотке трансформатора. Поэтому и фазный, и короткозамкнутый ротор будут работать без существенных отличий.
Следует упомянуть специальные конструктивные решения, которые сглаживают броски пускового тока. Они основаны на распределении электротока в зависимости от его силы по сечению проводника. Речь идет о двойной беличьей клетке и глубоком пазе. Изображения таких конструкций показаны далее. Но устройство асинхронного двигателя с короткозамкнутым ротором не обеспечивает управление электромагнитными процессами в нем.
 Ротор с глубокими пазами
Ротор с глубокими пазами Двуклеточный ротор
Двуклеточный роторЕсли потребуется плавно с ограничением тока запустить трехфазный асинхронный двигатель с короткозамкнутым ротором, надо в каждой фазе установить регулятор. Потребуется три регулятора, которыми надо согласованно управлять под напряжением источника питания. Получается сложная схема, которую не всегда удавалось эффективно реализовать. Поэтому применение фазного ротора вместо короткозамкнутого до появления мощных полупроводниковых приборов было самым оптимальным техническим решением ограничения пускового тока.
Как выглядит эта конструкция и его эквивалентная схема, показано далее.
 Фазный ротор
Фазный ротор
 Фазный ротор и его схема со стартовыми реостатами
Фазный ротор и его схема со стартовыми реостатамиВместо намного более простой, но сильно токовой беличьей клетки для каждой фазы делается обмотка (1) из большого числа витков. Соответственно, уменьшается величина тока. С этой же целью выбрано соединение звездой. Выводы обмоток расположенных на вале (2) и присоединяются к трем кольцам (3), установленным на этом же вале. Для получения возможности соединения с ними на корпусе движка крепятся щетки (4). Фактически каждая щетка — это вывод вторичной обмотки трансформатора. Присоединение статора к источнику питания будет означать появление напряжения на щетках.
Если к этим выводам не присоединена нагрузка, ротор реагирует на поле статора весьма незначительно. Он собран из пластин, изоляция которых препятствует появлению электротока. А при замыкании щеток накоротко получится разновидность короткозамкнутой конструкции. Следовательно, подбирая нагрузку, например, реостатом (5), можно обеспечить регулировку пускового тока и режима работы движка в дальнейшем. Но стоимость фазного ротора существенно выше беличьего колеса. И надежность щеточного контакта ухудшает характеристики электродвигателя.
 Трехфазный асинхронный двигатель
Трехфазный асинхронный двигательДвижки однофазные, отличие которых от трехфазных моделей заключено в первую очередь в существенно меньшей мощности, никогда не изготовляются с фазными роторами.
 Пример схемы управления на полупроводниковых элементах
Пример схемы управления на полупроводниковых элементахДа и современные асинхронные трехфазные движки дешевле сделать в виде короткозамкнутой конструкции с инверторным регулятором в цепи статора. Так что фазный ротор постепенно становится анахронизмом.
Похожие статьи:Устройство и принцип действия асинхронных электродвигателей
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Раньше, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому интересно, то можете почитать. Вот список:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
Ну а теперь давайте перейдём к теме сегодняшней статьи.
В нынешнее время, очень трудно представить, как бы существовали все промышленные предприятия, если бы не было асинхронных машин. Эти двигателя установлены практически везде. Даже дома у каждого человека есть такой двигатель. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и так далее.
Вообще асинхронный электродвигатель – это колоссальный прорыв в мировой промышленности. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых двигателей.
Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты.
А само слово «асинхронный» — означает неодновременных или не совпадающий по времени. Потому что у таких двигателей частота вращения ротора немного отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием называют – скольжением.
Обозначается это скольжение буквой: S
А вычисляется скольжение по такой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.
Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов. Соединяются обмотки статора в звезду или в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий равномерно растекается по пазам и образует стержни. А по краям эти стержни замыкают алюминиевыми кольцами. Получается своего рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
Принцип действия.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу роботы вот посмотрите видео ролик.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень простое устройство, что позволяет сократить затраты на его изготовление.
2. Цена намного меньше по сравнению с другими двигателями.
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
Недостатки:
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
3. Пусковой момент очень мал по сравнению с другими машинами.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
Недостатки:
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была вам полезной, то поделитесь нею со своими друзьями в социальных сетях. Если есть вопросы, то задавайте их в комментариях и подписывайтесь на обновления. Пока.
С уважением Александр!