


УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
Двигатели постоянного тока нашли множество применений, но непрерывное и плавное вращение ротора не всегда требуется. Естественная особенность двигателя BLDC, заключающаяся в том, что для его вращения необходимо постоянно переключать напряжения между обмотками, способствовала развитию шаговых двигателей. Их ротор может вращаться с определенными приращениями и оставаться стабильным в этих состояниях даже если управление прерывается. Возобновление подачи напряжения на катушки вызывает продолжение вращения.
Шаговые двигатели не имеют коммутаторов и щеток. Это синхронные двигатели постоянного тока с электронно-коммутируемым магнитным полем, вызывающим вращение якоря (его магнитов). Можно считать, что шаговые двигатели управляются цифровыми импульсами, и в шаговом двигателе полный угол поворота ротора разделен на дискретное количество шагов. Количество этих ступеней (фаз) равно количеству магнитов, расположенных вокруг центрального сердечника.
Конструкция шагового двигателя
Теория работы шаговых двигателей. В отличие от двигателей постоянного или переменного тока, для шаговых двигателей требуется последовательное питание, то есть они должны получать фиксированную последовательность импульсов для отдельных катушек. Также бывают биполярные и униполярные двигатели. Униполярный шаговый двигатель отличается от биполярного тем, что имеет дополнительный отвод обмотки, который разделяет обмотку на две части. Обычно биполярный шаговый двигатель имеет 4 или 8 контактов, а униполярный — 5 или 6 контактов.
Схема униполярных и биполярных шаговых двигателей
Вначале рассмотрим униполярный шаговый двигатель, ввиду простоты управления. В таком моторе ток в обмотке всегда течет в одном направлении. Это упрощает метод управления, в отличие от биполярного, где управление должно обеспечивать изменение полярности катушек шагового двигателя путем изменения направления тока через обмотку на противоположное.
Двух переключателей достаточно, чтобы построить простейший драйвер шагового двигателя, как показано на рисунке. Здесь используем 6-проводный униполярный двигатель. Также можно сказать, что двигатель в этом случае управляется однополярно, за счет использования средней обмотки катушки и постоянного напряжения питания на нее.
Переключая данные переключатели в последовательности S1, S2, S1, S2, S1, S2… заметим, что двигатель вращается. Рисунок выше иллюстрирует важный принцип управления: обе обмотки не могут питаться от одной пары одновременно. Каждое изменение переключателя поворачивает ротор на один шаг. Чем быстрее начнем переключать переключатели в последовательности S1, S2, S1, S2…, тем быстрее начнет вращаться ротор.
Подключение переключателей к катушкам шагового двигателя
Скорость шагового двигателя зависит не от величины напряжения, а от скорости подключения питания к отдельным обмоткам. Чтобы добиться полного вращения ротора с 200-шаговым двигателем, надо изменить положение каждого переключателя 100 раз, то есть выполнить до 200 последовательностей для двух переключателей.
В нашем случае последовательность переключений также определяет направление вращения шагового двигателя. Когда меняем последовательность включения переключателей, то меняем и направление вращения, например S2, S1, S2, S1, S2, S1… влево, S1, S2, S1, S2, S1, S2… вправо. В этом примере есть двухпозиционные переключатели, которые всегда обеспечивают питание двух из четырех обмоток шагового двигателя в данный момент. Но использование трехпозиционных переключателей дает гораздо больше возможностей.
Опять же, обе обмотки никогда не питаются от одной пары, что является обязательным принципом управления шаговым двигателем. Благодаря трехпозиционным переключателям можно реализовать, например, полушаговое управление, благодаря разнообразию переключений.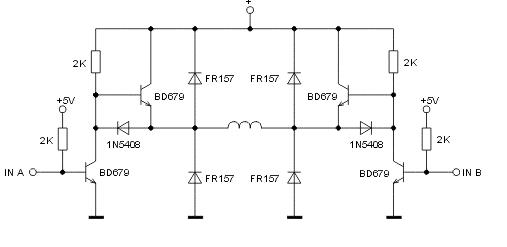
На практике вместо переключателей используются биполярные транзисторы, чаще можно встретить драйверы на основе полевых МОП-транзисторов, благодаря возможности пропускания большего тока, а также возможности их перегрузки. Транзистор здесь действует как переключатель, он либо закрыт, либо полностью открыт.
Упрощенная схема управления униполярным шаговым двигателем
Чтобы управлять таким мотором, надо обеспечить соответствующую последовательность импульсов. Например, только одна из четырех обмоток шагового двигателя находится под напряжением одновременно (это своего рода волновое управление). На каждый цикл двигателя подается питание на одну из четырех катушек униполярного шагового двигателя. Вращение его будет выглядеть так:
Вращение униполярного шагового двигателя в последовательных тактах цикла управления волной
Управляющая последовательность A +, B +, A-, B- повторяется каждые четыре импульса тактового генератора. Этот тип управления называется однофазным или волновым. Это полный шаг управления, потому что двигатель выполняет один полный ход (шаг) с одним импульсом генератора.
Этот тип управления называется однофазным или волновым. Это полный шаг управления, потому что двигатель выполняет один полный ход (шаг) с одним импульсом генератора.
Последовательность импульсов A +, B +, A -, B — вращает двигатель в одном направлении. Смена полюсов статора (N, S) заключается в питании соответствующей катушки (A + или A -).
Самый простой способ изменить направление — поменять местами одну пару проводов катушки (поменять местами, например, B + с B — и B — с B +), затем дадим последовательность A +, B -, A -, B + импульсы, он вращает двигатель в противоположном направлении. Так управление направлением реализовано в некоторых контроллерах шаговых двигателей. Самый простой способ изменить последовательность импульсов — использовать, например, реле.
Форма волны (однофазная) импульсная последовательность драйвера
Упрощенная схема однофазного (волнового) регулятора с изменением направления вращения
Несомненное преимущество униполярных шаговых двигателей — простота управления. Но это связано с волновым управлением, с использованием только половины обмотки за раз, одна из них всегда не используется. Используется только 1/4 всех обмоток шагового двигателя, что значительно снижает максимальную производительность.
Но это связано с волновым управлением, с использованием только половины обмотки за раз, одна из них всегда не используется. Используется только 1/4 всех обмоток шагового двигателя, что значительно снижает максимальную производительность.
Двухфазное управление шаговым мотором
Гораздо лучшей альтернативой однофазному управлению будет двухфазное, при котором работают две из четырех обмоток шагового двигателя. В таком управлении используем 1/2 всех обмоток. Тогда мотор станет более эффективен.
Вращение двигателя при двухфазном полноступенчатом управлении
Две катушки шагового двигателя всегда находятся под напряжением. Опять же, мы никогда не питаем две катушки из одной пары одновременно. С каждым импульсом от генератора переключается только одна катушка из отдельных пар (последовательно). В первом цикле катушки A и B находятся под напряжением, во втором катушка A все еще находится под напряжением, в то время как катушка B переключается на B +, в третьем цикле катушка B + находится под напряжением из второго цикла, и катушка A переключается на A + и так далее.
Двухфазная последовательность управляющих импульсов
Формы сигналов A + и B + сдвинуты друг к другу (две из четырех обмоток всегда работают в заданном цикле), а сигналы A + и B- инвертируются с сигналами A + и B +. Такие формы сигналов (смещенные относительно друг друга) легко генерируются, например, благодаря интегральной микросхеме 4013, которая имеет два D-триггера. Также можно использовать микроконтроллер. Изменение направления вращения в таком контроллере, как и при однофазном (волновом) управлении, может быть реализовано путем изменения направления проводов одной пары концов катушки (изменение с A + на A — и A — на A +). Чаще всего изменение скорости основано на изменении логики последовательности управляющих импульсов. Мы можем сделать это, например, используя логические элементы XOR, которые будут отрицать сигналы (инвертировать их).
Упрощенная схема двухфазного контроллера с изменением направления вращения, D-триггерами для создания смещенных сигналов и логическими вентилями XOR
Оба типа управления представленные выше: однофазный (волновой) и двухфазный (инвертированные сигналы, управляющие транзисторами), в просторечии, являются униполярными типами управления, потому что используем униполярные шаговые двигатели с дополнительными ответвлениями обмотки.
Также стоит упомянуть моторы VR (реактивного сопротивления). Двигатели VR обычно имеют три обмотки. Чтобы управлять таким двигателем, нам нужно подавать отдельные обмотки одну за другой в последовательности A, B, C, A, B, C… это заставит двигатель вращаться в одном направлении, в то время как последовательность питания обмотки A, C, B, A, C, B… заставит его вращаться в противоположном направлении. Самый простой способ изменить направление — поменять местами концы двух обмоток шагового двигателя VR, и проще всего это сделать с помощью реле.
Упрощенная схема драйвера резистивного шагового двигателя
Последовательность импульсов управления шаговым двигателем
Последовательность импульсов драйвера реактивного шагового двигателя очень похожа на волновое управление.
Биполярное управление обеспечивает более эффективное использование шагового двигателя, при котором всегда работает вся обмотка шагового двигателя, что дает гораздо лучшую производительность на низких и средних скоростях. А крутящий момент примерно на 30 — 40% больше. Но для этого требуется изменить полярность питания катушки, изменив направление тока в обмотках (например поменяв местами концы катушек). Для этого используются два транзисторных моста H (название происходит от сходства с буквой H на схеме), которые состоят из двух ветвей, а каждая ветвь состоит из двух транзисторов. Чаще всего для построения такого моста используются биполярные транзисторы NPN или MOSFET N.
А крутящий момент примерно на 30 — 40% больше. Но для этого требуется изменить полярность питания катушки, изменив направление тока в обмотках (например поменяв местами концы катушек). Для этого используются два транзисторных моста H (название происходит от сходства с буквой H на схеме), которые состоят из двух ветвей, а каждая ветвь состоит из двух транзисторов. Чаще всего для построения такого моста используются биполярные транзисторы NPN или MOSFET N.
Биполярный драйвер требует более сложного управления из-за того, что нужно управлять каждым из восьми транзисторов индивидуально. Взамен получаем все возможности шагового двигателя, хотя реализация такого типа управления не самая простая.
Принцип работы такого моста основан на том, что если верхний транзистор проводит в одной ветви, а нижний транзистор в другой, и наоборот, то через катушку шагового двигателя будет протекать ток. Если два верхних или два нижних транзистора проводят одновременно в двух ветвях одного моста, то ток через катушку не будет протекать. Путем соответствующего управления транзисторами получаем изменение направления тока, протекающего через катушку, и, таким образом, изменение полярности катушки.
Путем соответствующего управления транзисторами получаем изменение направления тока, протекающего через катушку, и, таким образом, изменение полярности катушки.
Также в биполярных контроллерах имеем дело с однофазным (волновым) и двухфазным управлением. Оба элемента управления являются полношаговыми. При однофазном управлении, как и в униполярных шаговых двигателях, в следующем цикле запитывается только одна катушка,
Вращение биполярного шагового двигателя в последовательных тактах однофазного (волнового) цикла управления
Вращение биполярного шагового двигателя в последовательных тактах двухфазного цикла управления
Упрощенная схема драйвера для биполярных двигателей с транзисторными Н-мостами
Последовательность импульсов для питания катушек идентична униполярному двигателю, но в этом случае нет четырех сигналов на транзисторы, только восемь сигналов на восемь транзисторов. Каждым из них нужно управлять индивидуально, переключая соответствующие транзисторы в нужный момент. Ток протекает через катушку, когда один верхний транзистор и один нижний транзистор включены «крест-накрест», то есть 1 и 3 на схеме, другие 2 и 4 в катушке A шагового двигателя закрыты. Но когда выключаем 1 и 3 и включаем 2 и 4, то меняем направление тока в катушке.
Ток протекает через катушку, когда один верхний транзистор и один нижний транзистор включены «крест-накрест», то есть 1 и 3 на схеме, другие 2 и 4 в катушке A шагового двигателя закрыты. Но когда выключаем 1 и 3 и включаем 2 и 4, то меняем направление тока в катушке.
Включаем транзисторы «крестом» в катушке A и B. Напряжение питания катушки задается как в униполярном управлении, в то время как «массовый» транзистор подключается крест-накрест к присоединенному верхнему силовому транзистору. Можем если надо изменить скорость, изменив управление двумя концами одной катушки, что приведет к другой последовательности импульсов. Самый простой способ — использовать реле, как при униполярном управлении, также можно реверсировать сигналы, управляющие транзисторами.
Ход управления катушками в биполярном шаговом двигателе волнового управления
Чтобы понять идею, можно сказать что на схеме показано питание проводов биполярного шагового двигателя, т. е. высокое состояние означает напряжение на конкретном проводе (A +, B +, A -, B -), а низкое состояние — появление заземления на отдельных проводах в заданном цикле. Здесь меняем направление тока в катушках, в первом импульсе (в первом цикле) генератор A + земля A — питается от генератора, а в третьем A — земля A + подается, меняя «полярность» источника питания так, чтобы меняли полярность катушек, например N на S.
е. высокое состояние означает напряжение на конкретном проводе (A +, B +, A -, B -), а низкое состояние — появление заземления на отдельных проводах в заданном цикле. Здесь меняем направление тока в катушках, в первом импульсе (в первом цикле) генератор A + земля A — питается от генератора, а в третьем A — земля A + подается, меняя «полярность» источника питания так, чтобы меняли полярность катушек, например N на S.
Фактически, форма сигналов управления транзисторами в H-мосте будет выглядеть как на схеме ниже. Это биполярное однофазное (волновое) управление.
Ход транзисторной последовательности управления в биполярном волновом контроллере
Идея управления катушками двухфазного биполярного двигателя аналогична управлению двухфазным униполярным шаговым мотором. Здесь также нужно управлять каждым транзистором отдельно, как в случае управления биполярной волной. Можем изменить скорость на реле, как при управлении волнами, или использовать логические вентили, меняющие сигналы.
Ход управления катушками в биполярном двигателе двухфазного управления
Эта схема, что касается управления биполярной волной, показывает соответствующий источник питания проводов биполярного шагового двигателя. Низкое состояние означает основное высокое напряжение питания катушки. В первом цикле проводники A — и B — земли A + и B + находятся под напряжением, во втором цикле проводники A — и B + земли A + и B- находятся под напряжением и так далее.
Последовательность импульсов управления транзистором будет выглядеть примерно так:
Последовательность управления транзистором в двухфазном биполярном контроллере
Как правило, биполярные шаговые двигатели требуют сложной схемы управления. Эта проблема была решена с появлением специализированных интегральных схем (A3977, A4988, L297), которые используются для генерации соответствующей последовательности импульсов для управления транзисторами в H-мосте.
Также можем использовать логические элементы или D-триггеры для генерации этой последовательности, но чаще существуют драйверы, построенные на микроконтроллерах или специализированных интегральных схемах.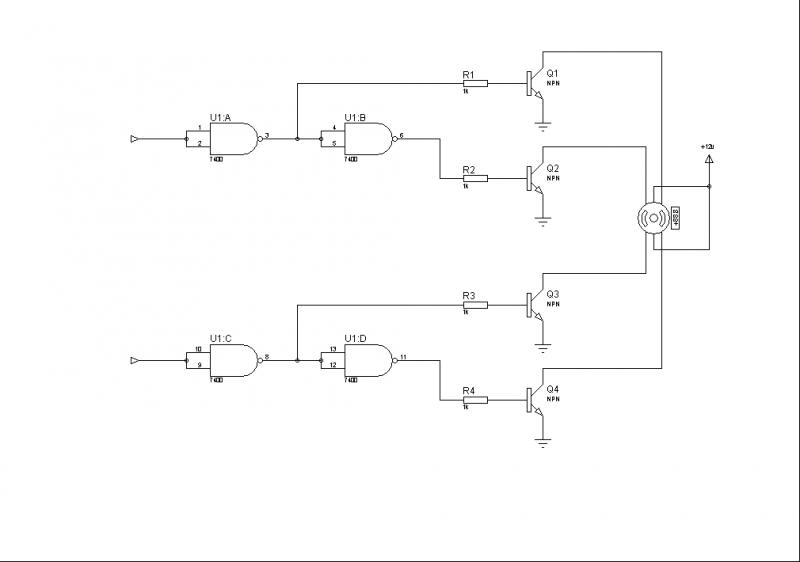
Самым большим преимуществом управления биполярным шаговым двигателем является хорошо используемый крутящий момент, благодаря тому что вся обмотка находится в текущем состоянии после получения импульса (в течение одного цикла).
Двигатели PM (с постоянным магнитом) и HB (гибридные), несмотря на их различную конструкцию, управляются одинаково. Каждый двигатель с 4 контактами может управляться только биполярно, в то время как униполярный шаговый двигатель с 6 контактами может работать как биполярный, так и униполярный.
Двигатели с 8 выводами дают гораздо больше возможностей, они могут работать как однополярные, так и биполярные. Кроме того, шаговый двигатель можно подключить последовательно, где нужно подавать на него более высокое напряжение, но в то же время он будет потреблять меньше тока, что приведет к снижению мощности на более высоких скоростях.
Также можем подключить его параллельно и запитать от более низкого напряжения, но с более высоким током. Это даст меньше потерь мощности на более высоких скоростях. На низких скоростях, как при последовательном, так и при параллельном подключении, двигатель будет иметь одинаковый крутящий момент (мощность).
На низких скоростях, как при последовательном, так и при параллельном подключении, двигатель будет иметь одинаковый крутящий момент (мощность).
Схема последовательного и параллельного подключения 8-проводного шагового двигателя
Идея последовательного и параллельного подключения также может быть использована с 6-проводным униполярным двигателем.
Схема последовательного и параллельного подключения 6-проводного шагового двигателя
Следует отметить, что при управлении шаговым двигателем мы переключаем обмотки, имеющие некоторую индуктивность. Когда ток прерывается в индуктивности, генерируется напряжение самоиндукции, которое может быть большим и повредить транзистор. Чтобы исключить это явление, необходимо правильно обеспечить протекание тока в катушке даже после выключения транзистора. Наиболее распространены быстродействующие диоды, которые срезают всплески, возникающие при открытии транзистора. Также можете найти драйверы с конденсаторами вместо диодов.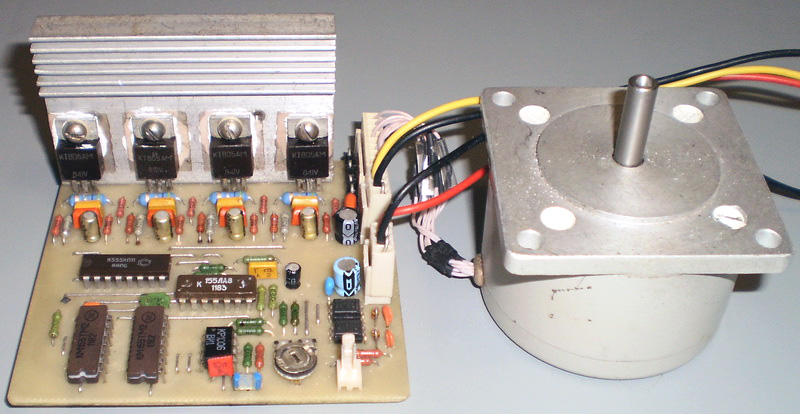
Схема подключения диодов к униполярному драйверу на биполярных транзисторах
Верхние диоды на схеме отсекают положительные импульсы, образовавшиеся в результате отключения тока от катушек шагового двигателя. С другой стороны, нижние диоды тоже нужны, потому что две обмотки одной пары образуют автотрансформатор. Когда в одной катушке есть положительное перенапряжение, отсекаемое верхним диодом, в другой катушке той же пары происходит отсечение отрицательного перенапряжения нижним диодом.
Иная ситуация с использованием MOSFET-транзисторов, потому что транзистор уже имеет в своей структуре переход сток-исток, который в данном случае действует как диод. При использовании небольших двигателей верхние диоды можно не устанавливать. Положительная энергия вывода не очень велика и может быть поглощена транзистором, который кратковременно работает в разрешенном режиме лавинного пробоя и действует как стабилитрон.
Схема униполярного шагового двигателя с MOSFET транзисторами
Также используем тот же принцип для биполярного управления. При использовании MOSFET-транзисторов можем использовать встроенные «диоды» в транзисторе.
При использовании MOSFET-транзисторов можем использовать встроенные «диоды» в транзисторе.
Схема использования диодов в биполярных драйверах
Схема биполярного шагового двигателя с MOSFET транзисторами
Ещё стоит упомянуть инерцию обмоток, ограничивающую скорость нарастания тока. Каждая из катушек шагового двигателя имеет определенную индуктивность L и сопротивление R. После подачи напряжения на катушку ток I определяется напряжением питания катушки (VCC) и ее сопротивлением, то есть I = VCC / R. Он не сразу достигает значения, определяемого L iR. Ток постепенно увеличивается, а постоянная времени нарастания составляет T = L / R. Обычно это 10 мс, поэтому период прямоугольной волны должен составлять 20 мс или 50 Гц, чтобы обеспечить 10 мс высокого состояния длительности импульса для катушки для достижения полного тока.
На низких частотах (скоростях) это значения не имеет, а на более высоких частотах ток не успеет увеличиться до нужного значения. Следовательно, двигатель будет значительно терять крутящий момент при увеличении оборотов, из-за того что ток не успевает увеличиться до номинального тока мотора.
Следовательно, двигатель будет значительно терять крутящий момент при увеличении оборотов, из-за того что ток не успевает увеличиться до номинального тока мотора.
Лучшее решение этой проблемы — подать на двигатель напряжение, намного превышающее номинальное напряжение его работы. Из-за более высокого напряжения ток нарастает быстрее. Правда для этого требуется специальная схема, ограничивающая ток протекающий по обмоткам.
Среди других решений — использование резистора, который выбирается так, чтобы ток в установившемся режиме был равен номинальному току двигателя. Недостатком такой системы являются большие потери мощности на резисторе.
Схема использования резистора для ограничения тока в обмотках шагового двигателя
Иное решение — заменить резисторы на источник тока, который будет поддерживать заданное значение. Сначала на катушку подается высокое напряжение, которое ускоряет нарастание тока, затем источник будет поддерживать заданное значение тока катушки. Правда потери мощности по-прежнему являются большим недостатком, на этот раз на транзисторах, из-за высокого напряжения питания.
Правда потери мощности по-прежнему являются большим недостатком, на этот раз на транзисторах, из-за высокого напряжения питания.
Схема использования источника тока для ограничения тока в обмотках шагового двигателя
Другой способ — работать от двух источников питания. В первые моменты импульса катушка питается от более высокого напряжения, которое ускоряет рост тока, затем она переключается на второй источник с номинальным напряжением питания шагового двигателя.
Недостатком такого решения является необходимость использования двух источников, что связано с дополнительными преобразователями. На схеме ниже переключатели используются для иллюстрации идеи переключения источников напряжения.
Упрощенная схема использования двух источников питания для регулирования тока в обмотках шагового двигателя
Самый эффективный метод — чопперский. Он заключается в подаче на катушку двигателя не одиночных импульсов, а серии импульсов по форме напоминающих сигнал ШИМ. В первый момент импульса от генератора прикладывается более высокое напряжение, которое ускоряет нарастание тока, позже оно ограничивается циклической работой транзистора.
В первый момент импульса от генератора прикладывается более высокое напряжение, которое ускоряет нарастание тока, позже оно ограничивается циклической работой транзистора.
Фрагмент схемы биполярного контроллера с технологией чоппера
Форма сигнала прерывателя для управления транзистором
Напоминаем, что в первые моменты управляющего импульса продлеваем включение транзистора, что позволяет быстрее увеличить ток, благодаря гораздо более высокому напряжению VCC, чем номинальное напряжение мотора. В следующие моменты импульса значительно сокращаем время транзистора, он работает циклически и тем самым ограничивает напряжение до номинального рабочего напряжения шагового двигателя. Компаратор, который будет сравнивать напряжения решает, когда сигнал управления транзистора должен быть переключен с постоянного на прерывистый. Благодаря этому есть возможность регулировать ток, подаваемый на катушку шагового двигателя.
Схема использования компаратора в биполярном контроллере
Эта схема очень эффективна и позволяет регулировать ток катушки независимо от напряжения питания, изменяя напряжение Vs.
Напряжение питания катушки VCC намного выше, чем рабочее напряжение обмотки, а это означает что после включения транзистора ток достигает своего рабочего значения намного быстрее, за гораздо более короткое время чем постоянная времени L / R. После достижения порогового значения (установленного Vs) компаратор сравнивает падение напряжения на управляющем резисторе Rs с напряжением Vs. Если ток двигателя и, следовательно, падение напряжения на Rs увеличиваются выше напряжения Vs, компаратор запускает моностабильный триггер, который излучает один импульс и на короткое время отключает напряжение питания катушки, что снижает ток, а затем цикл повторяется с начала.
В результате компаратор и триггер циклически открывают и закрывают транзистор, что предотвращает повышение напряжения катушки до напряжения питания VCC. За счет циклической работы транзистора ограничивается напряжение питания катушки шагового двигателя. Тогда течение имеет пилообразную волну. Ниже представлена диаграмма тока в обмотке прерывателя.
График импульсов тока в обмотке
Этот управляющий сигнал с прерывистой катушкой позволяет увеличить крутящий момент шагового двигателя, особенно при более высоких скоростях вращения. Конечно потребуется еще более интеллектуальная система управления (эта проблема была решена с появлением встроенных драйверов шаговых двигателей и микроконтроллеров), но она позволяет ускорить процесс увеличения тока благодаря подаче гораздо более высокого напряжения на более высокие частоты от генератора, без значительных потерь энергии или использования двух разных источников питания. Тут понадобится только один блок питания с относительно высоким напряжением.
Очень хорошая альтернатива, особенно в тех случаях когда драйвер не нуждается в специальных функциях, — использовать готовые интегральные микросхемы драйверов шаговых двигателей. Многие производители предлагают широкий спектр специализированных чипов, разработанных специально для управления шаговыми двигателями.
Обмотки шаговых двигателей чаще всего управляются формой сигнала ШИМ через H-мосты, по одному на обмотку. Угол поворота пропорционален количеству импульсов, а скорость вращения — их частоте. При работе с полными ступенями довольно много шума и вибрации. К сожалению, также могут быть случаи пропуска ступеней («выход») и, как следствие, потеря контроля над положением ротора. Эта проблема решается за счет использования микрошагов, таким образом питая обмотки так, что ротор проходит через промежуточные положения за один полный шаг.
Если для быстрой остановки двигателя требуется еще несколько шагов, важно правильно определить состояние перехода и остановки. В этом случае желательно управление с обратной связью в отличие от абсолютного позиционирования с обратной связью, основанного на подсчете шагов. Существует адаптивное управление скоростью шагового двигателя, позволяющее остановить его как можно скорее, несмотря на возможное увеличение нагрузки на этом этапе.

Это возможно на основании наблюдения увеличения BENF и соответствующего увеличения частоты импульсов, питающих двигатель. Вышеописанный алгоритм реализован в интегрированном однокристальном контроллере AMIS-30624. Он настроен для работы с различными типами шаговых двигателей, диапазонами позиционирования и такими параметрами, как скорость, ускорение и замедление.
Схема контроллера AMIS-30624
Он имеет встроенный бессенсорный детектор потери шага, который предотвращает потерю шагов позиционером и быстро останавливает двигатель при его остановке. Это обеспечивает тихую, но точную калибровку во время эталонного прогона и позволяет работать с полузамкнутым контуром. AMIS-30624 включает в себя как аналоговые цепи высокого напряжения, так и цифровые блоки управления. Чип разработан для применений в автомобильной, промышленной и строительной отраслях.
Форум
Форум по обсуждению материала УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
Драйвер шагового двигателя.
 Тестируем микросхему L9110 / Хабр
Тестируем микросхему L9110 / ХабрОткуда «ножки» растут
В настоящее время стали доступны и приобрели популярность различные станки с программным управлением. Это лазерные и фрезерные резчики и гравёры. А так же 3D принтеры. Все эти станки имеют один общий узел — шаговый двигатель.
И этому двигателю нужен драйвер.
Принцип работы двигателя не является предметом этой статьи. Мы рассмотрим только драйвер. Всё, что нам нужно знать в данном контексте — это какие управляющие сигналы нам нужно формировать для управления шаговым двигателем. Оказывается, это самые обычные прямоугольные импульсы.
Существует некоторое количество решений драйверов от различных компаний. В нашей статье мы рассмотрим самое доступное решение драйвера L9110 и его аналог HG7881 Это решение часто используется в Arduino
Теория и практика
Я решил применить микросхему L9110 в своём проекте.
Довольно легко нагуглил datasheet. Прочитал. Всё предельно понятно. Характеристики, распиновка, таблица истинности… По всем параметрам драйвер, вроде бы подходит. Напряжение коммутации — 12 вольт, выходной ток 800 ма. — всего хватает.
Напряжение коммутации — 12 вольт, выходной ток 800 ма. — всего хватает.
А что на деле?
Не откладывая в «долгий ящик» я сделал плату, написал и запустил тестовую программу…
Первое, на что я обратил внимание в своём устройстве — то, что микросхема драйвера сильно греется. Внимание! НА ХОЛОСТОМ ХОДУ. Без нагрузки. Это что за чудеса схемотехники?
Может у меня микросхема бракованная?
Пришла в голову идея рассмотреть сей девайс поподробнее. И не один, а кучу.
Сказано — сделано.
Хорошо, что у меня была припасена панелька SO-8 и плата для моделирования.
Ну, и контроллер на базе STM32.
Собран стенд и произведены измерения.
Да, кстати, кроме непосредственно, силового узла в микросхеме заложена логика исключающее ИЛИ. В даташите это описано.
Поскольку я изучаю эффект нагрева микросхемы, лучше не ограничиваться логическими единицами и нулями, а снять реальные напряжения.
В результате измерений получилась табличка:
Рассмотрим строчки 2 и 3. Что мы здесь видим?
Что мы здесь видим?
- Падение напряжения на выходных транзисторах, при наличии нагрузки, около полутора вольт, что при токе 0,33 ампера даёт 0,5 ватт на канал.
- На холостом ходу микросхема потребляет 0,05 А, что при напряжении 12 В даёт 0,6 ватт на канал.
Другими словами, независимо от нагрузки она потребляет около 0,5 Вт на канал. Теперь понятно, почему я об неё обжигал пальцы.
Сильный нагрев — это, конечно недостаток. Но может свою функцию микросхема выполняет хорошо? Тут пригодился недавно подаренный себе 4-х лучевой осциллограф приставка. Не ожидал, что мне так скоро потребуются все 4 луча. Для тестирования написал простенькую программку на stm32, который давно использую в различных проектах. Программа, просто, генерирует 2 прямоугольных сигналы с трёхкратной разницей частот.
Поскольку один раз увидеть лучше чем много раз прочитать — прикладываю развёртку сигналов управления.
Ничего особо сложного. Просто прямоугольные импульсы сдвинутые с разницей частоты в 3 раза.
Верхняя часть экрана — входные сигналы — нижняя — выходные.
Сразу бросается в глаза, что при различающихся значениях сигналов на входах, значения на выходах вполне чёткие Устанавливаются без задержек и с резкими фронтами.
Если же сигналы на входах совпадают — то фронт пологий. похож на разряд конденсатора.
Просмотрев документацию я не увидел ничего такого, что предвещало бы такое поведение.
Может я задал слишком высокую частоту входных сигналов? В даташите лимит не указан.
Уже зная, что у этого драйвера есть почти стопроцентный аналог HG7881 я обратился к его документации.
Она пролила больше света на эту загадочную ситуацию. Оказывается, логика работы драйвера немного шире. Две единицы на входе — это торможение ( то есть на выходе оба сигнала должно быть низкого уровня.) А два нуля на входе — это «висящие» контакты. Разрыв.
Значит два нуля на входе должны «подвешивать» выходы. Тогда, поведение разряжающегося конденсатора вполне предсказуемо. Однако две единицы на входах — должны быть надёжным нулём на выходе. А фактически это не так.
Однако две единицы на входах — должны быть надёжным нулём на выходе. А фактически это не так.
Я мог бы списать этот дефект на «китайского производителя». Однако, я тестировал микросхему по честному выпаянную из ардуиновской платы. При чём — не одну микросхему. Из нескольких плат. То есть, вероятность брака сильно снижена.
Вывод
Область применения микросхем L9110 уже, чем задекларирована, да и КПД низковат.
Рассеяние 0,5-0,6 ватта на одном ключе — это многовато. Не случайно это решение самое дешёвое.(10 центов за микросхему. на алиэкспрессе).
В следующих статьях будут рассмотрены альтернативные драйвера шаговых двигателей.
2012 Июль
Автор: admin11 Июл
Поддерживает два режима управления — ШИМ или PHASE/ENABLE
DRV8835 представляет собой драйвер управления двигателем, оснащенный двумя H-мостовыми выходными каскадами и предназначенный для управления двумя коллекторными электродвигателями постоянного тока или одним шаговым двигателем, а также другими устройствами, такими как соленоиды. Выходные каскады драйверов управления обмотками двигателей построены на N-канальных силовых MOSFET транзисторах, сконфигурированных как полный Н–мост.
Выходные каскады драйверов управления обмотками двигателей построены на N-канальных силовых MOSFET транзисторах, сконфигурированных как полный Н–мост.
Интегрированная схема подкачки заряда (charge pump) обеспечивает необходимое напряжение для управления затворами MOSFET транзисторов. Устройство обеспечивает выходной ток до 1.5 А на каждый мост и предназначено для управления электродвигателями с рабочим напряжением от 2 В до 11 В. Диапазон напряжения питания логических узлов DRV8835 составляет 2…7 В.
Читать далее »
11 Июл
Представленный компанией Texas Instruments контроллер биполярного шагового двигателя DRV8818 интегрирует два Н–мостовых драйвера и логическую схему микрошагового индексатора. Выходные каскады драйверов оснащены N-канальными силовыми MOSFET транзисторами, сконфигурированными как полный Н–мост для управления обмотками двигателя.
Простой интерфейс управления шагом и направлением вращения облегчает сопряжение устройства с управляющим контроллером. Интегрированный микрошаговый индексатор, конфигурируемый специальными выводами, упрощает регулировку тока обмоток двигателя, обеспечивая режим работы с полным шагом, 1/2, 1/4 или 1/8 шага. Кроме того, устройство обеспечивает управление режимом затухания тока и программирование времени отключенного состояния схемы ШИМ.
Читать далее »
10 Июл
Компания STMicroelectronics представила широкое семейство интеллектуальных силовых ключей, оснащенных средствами доскональной диагностики и передовыми системами защиты. Построенные по технологии VIPower™ M0-5, устройства соответствуют самым высоким стандартам автомобильной промышленности и сохраняют работоспособность в условиях теплового стресса (быстрых тепловых переходных процессов).
Коммутаторы оснащены средствами внутреннего контроля, такими как схема ограничения мощности, обеспечивающая снижение степени деградации полупроводникового кристалла за счет отключения интегрированного вертикального силового MOSFET транзистора при внезапном увеличении температуры перехода.
Читать далее »
10 Июл
CLT3-4B представляет собой четырехканальный формирователь логического сигнала (терминатор), обеспечивающий интерфейс цифровой схемы с датчиками или механическим переключателями. Устройство предназначено для работы в приложениях с напряжением питания 24 В, таких как программируемые логические контроллеры (PLC), программируемые контроллеры автоматизации (PAC) или системы распределенного ввода/вывода, используемые в системах промышленной автоматики.
Входные характеристики CLT3-4B позволяют минимизировать рассеяние мощности, что является актуальным при использовании в приложениях, предполагающих размещение в корпусах с уровнем защиты от проникновения пыли и влаги на уровне IP65 и IP67. Оборудование данного типа представляет собой герметично закрытые шкафы и используется в различных автоматических линиях в таких отраслях, как пищевая и химическая промышленность.
Читать далее »
10 Июл
Один из самых компактных в мире модулей ГЛОНАСС/GPS, отличающийся высокой чувствительностью, точностью и малым временем первого запуска (TTFF).
Компания SIMCOM представила SIM68 — новый высокопроизводительный и надежный комбинированный навигационный модуль ГЛОНАСС / GPS. Устройство поддерживает 32 канала слежения и позволяет отслеживать сигнал от систем GPS, Galileo, ГЛОНАСС и QZSS. Интегрированный чипсет STA8088FG (STMicroelectronics) обеспечивает высокий уровень чувствительности и точности, а также малое время первого запуска, благодаря чему устройство идеально подходит для автомобильных и потребительских приложений.
Читать далее »
- Комментарии отключены
- Рубрика: SIMCom
10 Июл
PCA8885 — это емкостный 8-канальный бесконтактный переключатель, использующий запатентованный цифровой метод детектирования изменения емкости на удаленном сенсорном контакте. Изменения статической емкости (в отличие от динамического изменения емкости) автоматически компенсируются благодаря использованию непрерывной автоматической калибровки.
Изменения статической емкости (в отличие от динамического изменения емкости) автоматически компенсируются благодаря использованию непрерывной автоматической калибровки.
Сенсорный контакт (например, проводящая площадка) может подключаться к микросхеме непосредственно или удаленно посредством коаксиального кабеля. Восемь входных каналов работают независимо друг от друга. Кроме того, устройство позволяет использовать режим матричного расположения датчиков: прерывание генерируется только в случае одновременной активации двух каналов, при этом остальные каналы блокируются до момента освобождения активной пары каналов.
Читать далее »
- Комментарии отключены
- Рубрика: NXP
10 Июл
PCA8536 — это периферийное устройство, позволяющее управлять практически любыми жидкокристаллическими индикаторами (ЖКИ) с низким уровнем мультиплексирования.
Новый драйвер позволяет генерировать сигналы управления для любого мультиплексного ЖК индикатора, содержащего до восьми сигнальных линий по 44 сегмента в каждой и до 320 графических элементов. Устройство совместимо с большинством микроконтроллеров и управляется посредством двухпроводной двунаправленной шины I2C (PCA8536AT), либо трехпроводной однонаправленной шины SPI (PCA8536BT). С целью минимизации затрат времени на передачу данных, экранная память устройства оснащена схемой автоинкремента адреса, позволяющей осуществлять загрузку данных в пакетном режиме.
Читать далее »
- Комментарии отключены
- Рубрика: NXP
10 Июл
5 А, 100 В полумостовой драйвер затвора GaN FET-транзисторов, работающих в режиме обогащения
LM5113 — это высокоинтегрированный, 5-амперный, 100-вольтовый полумостовой драйвер затвора, позволяющий увеличить плотность мощности и эффективность высоковольтных приложений.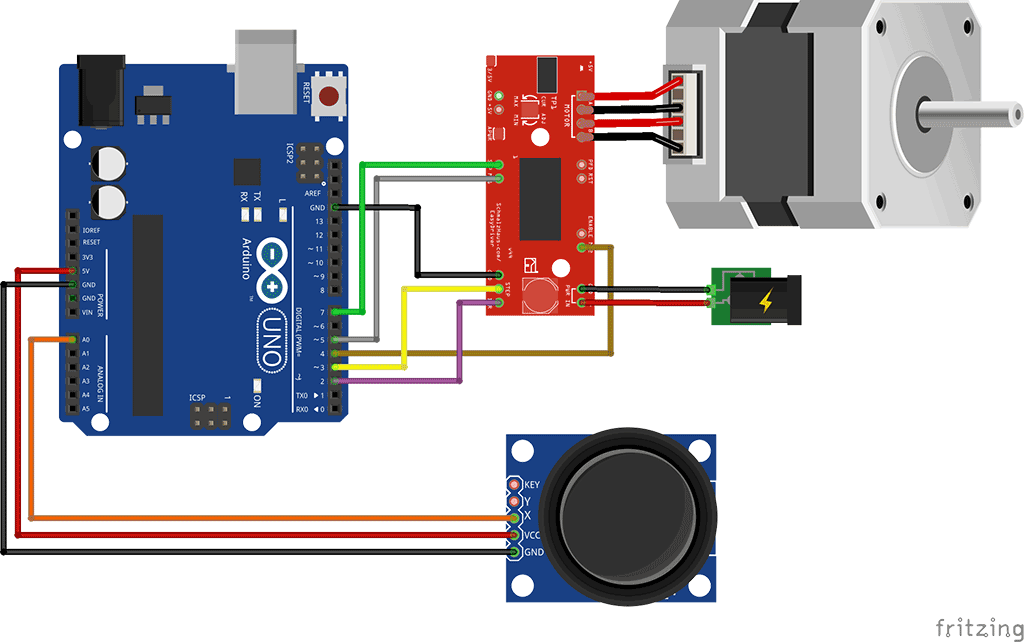
LM5113 предназначен для управления полевыми транзисторами на основе нитрида галлия (GaN FET), работающих в режиме насыщения, верхнего и нижнего плеча в синхронной повышающей или полумостовой конфигурациях. «Плавающий» драйвер верхнего ключа способен управлять GaN FET транзисторами с режимом насыщения с рабочим напряжением до 100 В. Напряжение смещения верхнего ключа генерируется методом подпитки (bootstrap) и внутренне ограничено уровнем 5 В, не позволяя напряжению затвора превысить максимально допустимое напряжение затвор-исток GaN FET транзистора с режимом насыщения. Входы LM5113 совместимы с логическим TTL уровнем и способны выдерживать напряжение вплоть до 14 В, не зависимо от напряжения питания VDD. LM5113 имеет независимые выходы затворов, что обеспечивает высокую гибкость регулирования интенсивности включения и выключения.
Читать далее »
10 Июл
LMP91200 представляет собой конфигурируемое устройство сопряжения аналоговых двухэлектродных датчиков кислотности (рН) с микроконтроллером, отличающееся малым энергопотреблением.
LMP91200 интегрирует все необходимые функциональные узлы для подключения большинства современных pH–датчиков, использующих потенциометрический принцип измерения реакции среды (измерение ЭДС между pH электродом и электродом сравнения). Оптимизированный для применения в приложениях с низким энергопотреблением, LMP91200 поддерживает напряжения питания в диапазоне от 1.8 В до 5.5 В. Интегрированный буфер со сверхмалым входным током смещения оптимален для использования с датчиками кислотности. Кроме того, сверхмалый входной ток смещения (0.4 пА макс.) уменьшает деградацию подключенного к LMP91200 рН-зонда при отсутствии напряжения питания.
Читать далее »
10 Июл
Компанией Infineon выпущена новая серия линейных стабилизаторов напряжения, DC/DC-преобразователей и CAN-трансиверов, предназначенных для применения в бытовых и промышленных приложениях.
Соответствие производимой продукции наивысшим стандартам качества и надежности сегодняшнего рынка достигается путем использования компанией Infineon богатого собственного опыта, а также общеизвестных мировых исследований в области автомобильных применений.
Читать далее »
- Комментарии отключены
- Рубрика: Infineon
Самодельный Драйвер Биполярного Шагового Двигателя Микрошаг
Cncjuniormaster.ucoz.com Блок контроллера униполярного шагового двигателя на PIC18F2320 V4. 1100 × 880 — 259k — jpg cncjuniormaster.ucoz.com Блок контроллера биполярного шагового двигателя на PIC18F2320 V5.1. 1949 × 1202 — 314k — jpg kazus.ru Контроллер шагового двигателя 1046 × 430 — 17k — gif forum.cxem.net Шаговый Привод На Pic Контроллере ( Самодельный) — PIC — Форум. 450 × 377 — 39k — jpg texvedkom.org Схемотехника привода шагового двигателя Техведком 1000 × 396 — 36k — gif we.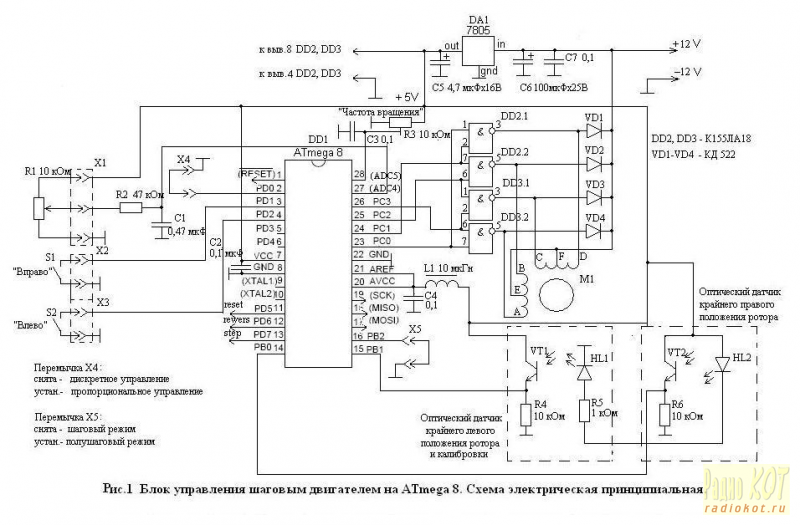 easyelectronics.ru Делаем контроллер шагового двигателя. 440 × 474 — 101k — png mozgochiny.ru Шаговый двигатель BYJ48.
easyelectronics.ru Делаем контроллер шагового двигателя. 440 × 474 — 101k — png mozgochiny.ru Шаговый двигатель BYJ48.
Теория управления 800 × 442 — 59k — jpg mypractic.ru Драйверы униполярного и биполярного шагового двигателя. 1024 × 519 — 56k — jpg offtop.ru Домашний станок ЧПУ 1200 × 432 — 51k — gif culibin.net Самодельный драйвер-контроллер шагового двигателя на A3977, A3979. 530 × 220 — 33k — png radiokot.ru РадиоКот:: 4-х осевой Step/Dir контроллер шаговых двигателей 500 × 545 — 15k — png cxem.net Драйвер биполярных шаговых двигателей 1200 × 843 — 74k — png forum.cxem.net Шаговый Привод На Pic Контроллере ( Самодельный) — PIC — Форум. 1024 × 575 — 116k — jpg detali-prof.ru Драйвер биполярных шаговых двигателей 709 × 390 — 10k — gif forum.cxem.net Шаговый Привод На Pic Контроллере ( Самодельный) — PIC — Форум.
500 × 333 — 36k — gif mysku.ru Микрошаговый драйвер A3967 для тестера РХХ автомобиля 800 × 465 — 75k — jpg forum.cxem.net Faq О Шаговых Двигателях — Роботы и модели на ДУ-управлении.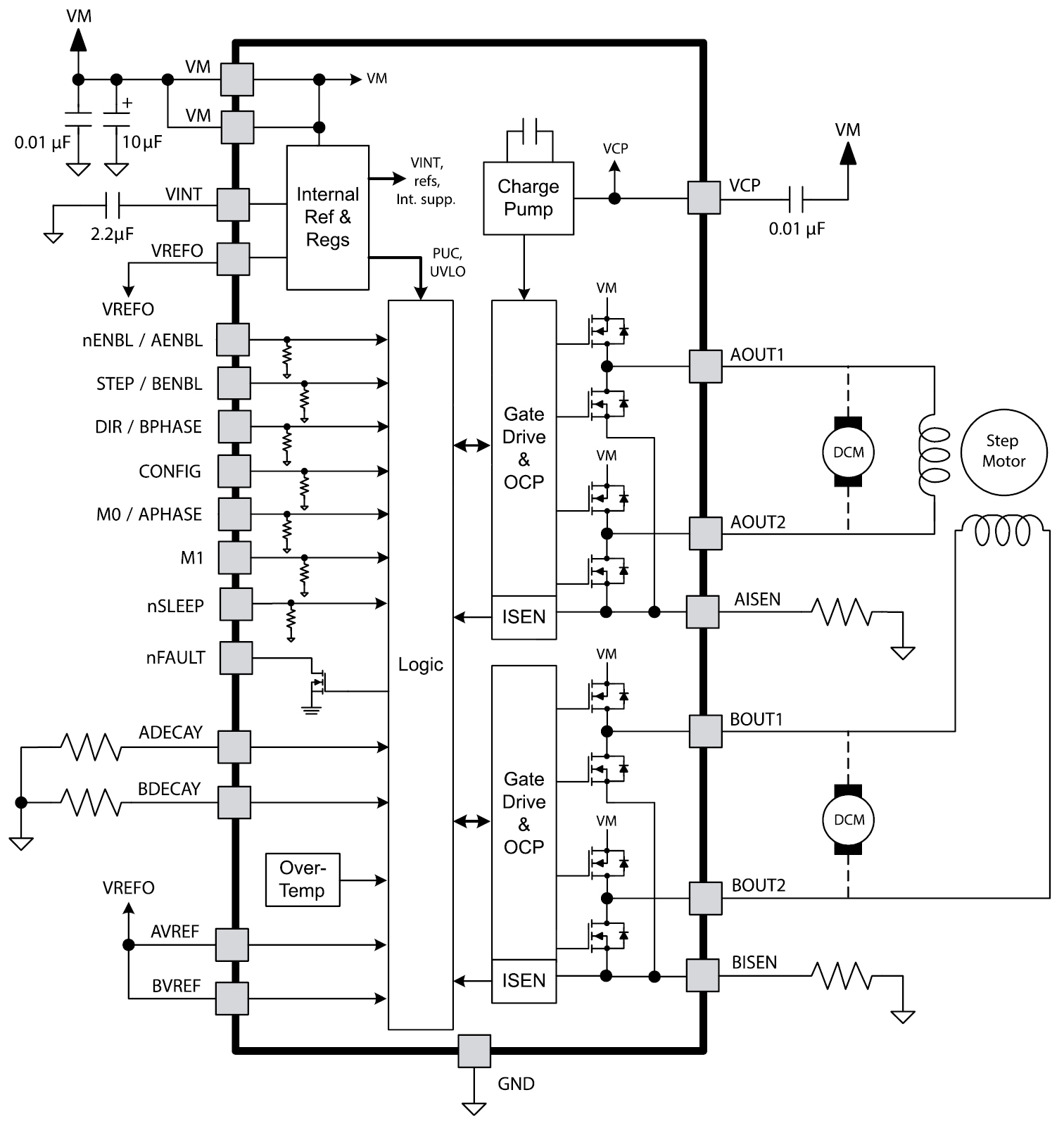 2456 × 1316 — 44k — gif profstroy-vl.ru Драйверы униполярного и биполярного шагового двигателя. 689 × 386 — 10k — gif profstroy-vl.ru Драйвер для коллекторного двигателя на полевых транзисторах 585 × 289 — 20k — jpg geektimes.ru Быстрые движения под высоким напряжением, или почти вся правда. 1920 × 803 — 273k — png.
2456 × 1316 — 44k — gif profstroy-vl.ru Драйверы униполярного и биполярного шагового двигателя. 689 × 386 — 10k — gif profstroy-vl.ru Драйвер для коллекторного двигателя на полевых транзисторах 585 × 289 — 20k — jpg geektimes.ru Быстрые движения под высоким напряжением, или почти вся правда. 1920 × 803 — 273k — png.
Статье: cnc, чпу, драйвер двигателя, контроллер шагового, микрошаг, шаговый двигатель, PIC18F2320. Своими руками Форум Драйвер биполярного ШД на транзисторах Форум Cтанок своими руками, чпу своими руками, cnc. Драйвер Sm-G313Hu. Самодельный станок с ЧПУ Использование шаговых двигателей.
adminСхема простого драйвера для униполярного шагового двигателя
Схема драйвера униполярного шагового двигателя, описанная в данной статье, реализует следующие задачи:
• управление 4-фазовым униполярным шаговым двигателем.
• обеспечивает плавную регулировку скорости вращения и изменение направления вращения.
• выполняет функцию остановки двигателя.
Ниже представлена принципиальная схема драйвера шагового двигателя. Драйвер построен с использованием трех микросхем 4000 серии и четырех силовых MOSFET транзисторов.
Схема тактируется генератором прямоугольных импульсов, построенного на логических элементах 2И-НЕ с триггером Шмитта на выходе. Рабочая частота генератора определяется общим сопротивлением PR1 + R2 и емкостью конденсатора С1, и может быть изменена в широком диапазоне с помощью потенциометра PR1.
Фрагмент схемы на элементах EXOR и J-K триггере создает счетчик по модулю 4, с тактами высокого уровня. Переключатель SB1 (JP1) предназначен для изменения направления работы счетчика, а, следовательно, для изменения направления вращения шагового двигателя. С помощью переключателя SB2 (JP2) можно запускать и останавливать двигатель.
Управление катушками 4-фазного шагового двигателя осуществляется с помощью четырех MOSFET транзисторов (VT1…VT4). Использование в данной схеме транзисторов высокой мощности типа BUZ11 — это решение, гарантирующее надлежащую работу двигателя высокой мощности.
Использование в данной схеме транзисторов высокой мощности типа BUZ11 — это решение, гарантирующее надлежащую работу двигателя высокой мощности.
Ниже показаны формы сигналов на разъеме Х2, к которому подключаются обмотки шагового двигателя.
Драйвер собран на печатной плате, рисунок которой приведен ниже. Монтаж следует начать с установки резисторов, панельки под микросхемы и закончить разъемами и силовыми транзисторами.
Силиконовый коврик для пайки
Размер 55 х 38 см, вес 800 гр….
Разъемы JP1 и JP2 имеют ту же функцию, что и нажатие кнопки SB1 и SB2, так что вы можете подключить к ним кнопки и вынести их за пределы платы.
Печатная плата разработана таким образом, что вы можете установить транзисторы на общий радиатор, предварительно изолировав их слюдяными или силиконовыми прокладками.
После сборки необходимо тщательно проверить плату на предмет короткого замыкания дорожек. Драйвер, собранный из исправных деталей не требует настройки и начинает работать сразу.
Следует, упомянуть о способе подключения питания и обмоток двигателя к плате драйвера. В случае питания схемы управления и двигателя тем же напряжением, которое находится в диапазоне от 5…15 В, и ток потребления не превышает 1 А, то необходимо установить перемычку JP3 и питание подать к разъему VDD.
Если параметры питания шагового двигателя не находится в пределах напряжения питания схемы драйвера, то необходимо снять перемычку JP3, и к разъему VDD подвести напряжение питания от 5…15 В, а к разъему X2 подать питание в соответствии с параметрами шагового двигателя.
Рисунок печатной платы (8,5 KiB, скачано: 2 167)
Запускаем шаговый двигатель при помощи таймера NE555 — 26 Ноября 2019
Шаговый двигатель представляет собой особый тип двигателя, вал которого перемещается точно на определенный градус с каждым новым поступающим импульсом. Чтобы управлять шаговым двигателем, мы должны организовать определенный порядок формирования управляющего напряжения, которое поступает на выводы обмоток электродвигателя.
Ниже приведено несколько примеров подключения шагового двигателя без применения микроконтроллеров с использованием таймера NE555
Вариант 1
Эту достаточно сложную задачу попробуем решить при помощи таймера NE555 и двух интегральных микросхем CD4070 (К1561ЛП14) и CD4027(K561ТВ1).
Таймер 555 будет генерировать поток тактовых импульсов для управления скоростью вращения шагового двигателя. Тогда как микросхемы DD2 и DD3 будут формировать последовательно сигналы в правильном порядке, чтобы электродвигатель начал вращаться.
Вращая ручку переменного резистора можно изменять частоту сигнала, а значит и скоростью вращения.
Далее импульсы подаются на вход двух JK-тригеров (CD4027), которые формируют управляющие импульсы в необходимом порядке. Цепь на микросхеме CD4070 позволяет менять вращение на противоположное при помощи переключателя SA1. Для снижения нагрузки на выходы DD3 использованы 4 транзистора и 4 диода для защиты транзисторов от всплесков самоиндукции.
Вариант 2
Схема простого контроллера шагового двигателя приведена на рисунке:
Контроллер состоит из мультивибратора на таймере 555, микросхемы десятичного счётчика 4022 (CD4022, HEF4022 и т. д.) и необязательных светодиодов с резистором для визуализации и наглядности, резистор один т. к. больше одного светодиода в данной схеме светиться не может. Счётчик десятичный т.е. при подаче на его тактовый вход (CLOCK (вывод 14)) импульсов напряжения на выводе соответствующему выходу номер которого совпадает с количеством поданных импульсов, после сброса, появляется напряжение уровня логической единицы, на всех остальных выводах выходов, при этом, устанавливаются напряжения уровня логического нуля. Вывод «11» соединён с выводом «15» для того чтобы ограничить счёт данного счётчика. Когда на тактовый вход приходит четвёртый импульс, после сброса, на выводе «11» (выход out4) появляется напряжение уровня логической единицы которое подаётся на вывод «15» (RESET) — вывод сброса, от этого счётчик происходит сброс счётчика в исходное состояние когда напряжение уровня логической единицы будет на выводе «2» который соответствует выходу out0 (т. е. 0 импульсов пришло на тактовый вход). Если вывод «15» соединить с «землёй» (GND, минус ноль питания) а «14» при этом никуда не соединять то счётчик будет считать 7 импульсов, 8-ой импульс произведёт сброс и счёт пойдёт заново (так можно сделать мигалку с 8 светодиодами). Если убрать мультивибратор и светодиоды то останется только микросхема 4022 и её можно использовать с программируемым устройством для управления шаговым двигателем подавая на тактовый вход этой микросхемы импульсы с программируемого устройства. Вместе с этим контроллером можно использовать например драйвер на эмиттерных повторителях на транзисторах такая схема универсальная, безопасная при неправильном управлении но у неё есть недостатки, можно также использовать микросхему драйвер если она подходит. Схема драйвера:
или использовать к примеру микросхему UNL2003
Драйвер-контроллер 7TPSM4220 шагового двигателя Nema17 11-28В 0.3-2A
Драйвер-контроллер 7TPSM4220 шагового двигателя Nema17
- Входное питание: 11-28 В / 5 А
- Напряжение логики: 3.3-5 В / 12-24 В
- Микрошаг: 1/32
- Плавно регулируемый ток 0.3-2 А
- Настройка микрошага: ручная, переключателями
- Частота: 0-20 кГц
- Корпус: из литого алюминия
- Охлаждение: пассивное теплоотведение
- Разъём управления: 5264-6P
- Защита: от перегрева, перегрузки, переполюсовки
- Высокоскоростная оптическая изоляция параллельного интерфейса
- Простая установка на корпус мотора Nema17
- Размеры: 42.2 х 42.2 х 14.5 мм
Драйвер, или правильно — контроллер, шагового двигателя — электронное устройство, способное принимать сигналы управления от внешнего источника, и одновременно трансформировать их в рабочий ток, распределяемый на каждую электрическую обмотку (фазу) мотора. Переключая в определённой последовательности напряжение на фазах и контролируя ток, драйвер принуждает вращаться вал шагового двигателя в определённом направлении на определённый угол («шагать»).
Модель драйвера 7TPSM4220 отличается от большинства подобных устройств своим конструктивным исполнением. Форма изделия предоставляет возможность устанавливать драйвер непосредственно на основание шагового мотора. Габариты корпуса по длине и ширине имеют стандартные для Nema17 размеры — 42 х 42 мм. Для надежной фиксации двигателя с контроллером достаточно воспользоваться четырьмя обычными болтиками диаметром 3 мм.
Контроллер имеет пассивное охлаждение, рассеивающее выделяемое тепло в окружающую среду. Корпус конструкции изготовлен из цельнометаллического алюминиевого сплава. При необходимости, на решётку радиатора можно самостоятельно аккуратно прикрепить дополнительный вентилятор.
Контакты управляющих сигналов DIR, STP, EN обладают внутренней оптической развязкой, предназначенной для увеличения степени электробезопасности — защиты электронных компонентов драйвера от повреждений при возможных скачках напряжения.
Драйвер 7TPSM4220 оснащён четырьмя контактами, соединяемыми с двухфазным шаговым мотором. Сопряжение контроллера и двигателя Nema17 осуществляется в соответствии с обозначением выводов каждой обмотки двигателя. Первая обмотка — линии А+, А-, вторая обмотка В+, В-. Иногда, встречается обозначение: A, C (первая) и B, D (вторая).
Обзор драйвера
Назначение выводов
- V+ — положительный «плюсовой» контакт входного напряжения
- GND — общий «минусовой» контакт входного напряжения
- COM — общий контакт сигнальных линий (DIR/STP/EN)
- DIR — сигнал направления вращения вала
- STP — сигнал вращения вала на шаг, с учётом выбранного дробления физического шага
- EN — сигнал включения/выключения драйвера (например, для экстренной остановки)
Микропереключатель HV служит для выбора уровня напряжения сигналов управления, в положении ВКЛ — устанавливается напряжение в интервале 3.3-5 вольт, в положении ВЫКЛ — устанавливается напряжение в диапазоне 12-24 вольта.
Регулировка тока фазы
На обратной (тыльной) стороне драйвера установлен подстроечный резистор. Он имеет собственное отверстие-контакт на плате драйвера, которое обозначено маркировкой Vref. Контакт необходим для измерения текущего показателя опорного напряжения, используемого в процессе регулировки тока по формуле расчёта. Замер напряжения производится обычным мультиметром между выводами GND (общий, заземление) и Vref (плюсовой) путём вращения подстроечного резистора до получения на выводах необходимого значения.
Формула расчёта: Ток фазы = Vref * 2
Например: ток фазы шагового двигателя составляет 1.7 А.
Vref = 1.7 / 2 = 0.85 вольта.
Допустимый диапазон регулировки Vref от 0.15 до 1.0 вольта (ток фазы от 0.3 до 2.0 А).
Примечание. Формула расчёта для других моделей драйверов может отличаться. Настоящая формула представлена исключительно для настройки ШД-контроллера 7TPSM4220.
Дробление шага
Дроблением шага называется деление основного шага на определённое количество маленьких шагов, например 1/2 = 0.9°, 1/4 = 0.45° и т.д. Изменением микрошага можно добиться увеличения плавности хода с одновременным уменьшением шума и вибрации. Во время выполнения микрошага, переключаемый между катушками двигателя ток не достигает номинальной величины, оставаясь лишь на определённом уровне. Благодаря этому, достигается возможность удержания вала в промежуточном положении от полного шага.
Физический шаг большинства шаговых двигателей равен 1.8°, полный оборот вала двигателя на 360° будет достигнут за 200 шагов. Например, производимое деление шага в соотношении 1/8 подразумевает передачу 8 сигналов вращения на каждый полный физический шаг. Общее количество микрошагов до полного оборота вала двигателя увеличивается на 8 (8*200 = 1600).
Примечание. В большинстве случаев, увеличение значения дробление шага приводит к искажению позиционирования вала двигателя примерно на 3-5%.
Выбор микрошагового режима осуществляется изменением положений рычажков механического DIP-переключателя. Возможные варианты представлены в таблице ниже
| М0 | М1 | М2 | Дробление |
| ВКЛ | ВКЛ | ВКЛ | 1 |
| ВЫКЛ | ВКЛ | ВКЛ | 2 |
| ВКЛ | ВЫКЛ | ВКЛ | 4 |
| ВЫКЛ | ВЫКЛ | ВКЛ | 8 |
| ВКЛ | ВКЛ | ВЫКЛ | 16 |
| ВЫКЛ | ВКЛ | ВЫКЛ | 32 |
Пример установки 7TPSM5720 на корпус шагового мотора NEMA17
Габаритные размеры, мм
| Многие гонщики Великобритании сейчас используют
импортные транзисторные контроллеры, которые имеют схему, отличную от «нормальной».
Британская «схема» описана в другом месте на этом веб-сайте.
импортные контроллеры используют вариации одной и той же схемы, которую я назову
схема NPN. «Нормальная британская» схема использует тип питания PNP. В этих импортных контроллерах используется силовой транзистор типа NPN. Эти два типа транзисторов работают одинаково, за исключением электрического ток проходит в обратном направлении.Они оба «линейные» схемы, что означает, что при частичной мощности они уменьшают мощность автомобиля, превращая нежелательную энергию в тепло. Любая схема будет вырабатывают точно такое же количество тепла при вождении одного и того же автомобиля по такая же скорость. Таким образом, для обоих типов требуется радиатор одинакового размера (и охлаждение вентилятор), чтобы поддерживать температуру транзистора. Они оба работают очень похожим образом, поэтому, как только вы поймете, как он работает, его легко посмотреть, как работает другой.Я использовал другой способ описания работы двух типов, надеюсь, это поможет некоторым читателям понять это легче (хотя всегда есть риск удвоения путаница!) В коммутации используется транзисторная схема совершенно другого типа. контроллеры. | |
Схема NPN Есть два отдельных дворника (оба установлены на спусковом крючке).
рука в контроллере).Стеклоочиститель 1 регулирует ток на базу
транзистор. Стеклоочиститель 2 обеспечивает полную мощность и тормоза. (В некоторых
Контроллеры дворника 2 — Парма полной мощности и тормозные контакты
а не дворник как таковой. Некоторые контроллеры имеют полную мощность
реле добавлено). | |
| Как это работает? Транзистор работает только при включенном контроллере
власть. На полной мощности и торможении транзистор не проходит ни одной
текущий (если нет неисправности). | |
Падение напряжения в Контроллер, когда он включен, мощность может быть рассчитана с помощью Ом закон и немного упростив его, приняв ток, идущий на базу, незначителен, ответ будет Транзистор не включается до тех пор, пока не появится напряжение от b до e. больше примерно 0.6 вольт. Итак, если мы используем ровно 0,6 в над уравнением, становится. Где VLN
= Напряжение, измеренное между контактами L и N | |
| Что делает это
скажи нам? Когда контроллер находится на частичном питании (обычно на поворотах) Падение напряжения не может быть меньше 0.6 вольт. (и будет больше
если R1 не очень низкое значение) | |
| Что происходит на тормозе? Вот перерисованная диаграмма с дворниками в положении тормоза. Курок стеклоочистителя 1 ни к чему не подключен. Основа Транзистор подключен к эмиттеру через регулировку чувствительности резистор и R2. Это означает, что база и эмиттер находятся на такое же напряжение, поэтому транзистор не будет пропускать ток. Стеклоочиститель 2 спускового механизма соединяет контакт N напрямую с контактом E, нормальный тормоз подключение точно так же, как и любой контроллер. Обратите внимание, что при торможении коллектор транзистора все еще подключен к L штырь, поэтому, если произошла неисправность, из-за которой ток течь на базу, транзистор нагревался, когда контроллер был на тормозе. | |
| Что происходит на полной мощности? Вот перерисованная диаграмма с дворниками в положении полной мощности. Стеклоочистители 1 и 2 триггера подключены к выводу L. Это означает, что база, коллектор и эмиттер имеют одинаковое напряжение, поэтому транзистор не будет пропускать ток.В качестве альтернативы, которая будет работать одинаково ну это для триггера стеклоочистителя 1 ни к чему не подключать. Здесь снова база, коллектор и эмиттер находятся под одинаковым напряжением, поэтому транзистор не будет пропускать ток. Стеклоочиститель 2 триггера подключает контакт N напрямую к контакту L, на полную мощность подключение точно так же, как и любой контроллер. Обратите внимание, что на полной мощности все 3 вывода транзистора подключены вместе, поэтому он все равно будет работать на полной мощности даже с транзистором вина. | |
| Это много
отличается от «нормального»
Британская схема Дарлингтона PNP? Во многих отношениях она очень похожа, за исключением . Эта схема NPN использует один транзистор, а не схему Дарлингтона. пара », с одним транзистором падение напряжения не может быть меньше 0,6 вольт, с «парой Дарлингтона» два транзистора в серии, поэтому падение напряжения никогда не должно быть меньше 1,2 вольт. Цепь NPN требует двух изолированных дворников, подключенных к спусковому крючку, где для схемы, использующей транзисторы PNP, нужен только один стеклоочиститель.(В база транзистора NPN должна быть подключена к контакту N, чтобы отключиться, когда контроллер на тормозе. База транзистора PNP должна быть подключен к контакту L для выключения, когда контроллер находится в режиме торможения.) | |
| Это много
отличается от одиночной схемы PNP (например, Paul
Конструкция Бакнелла) В большинстве случаев они одинаковы, за исключением того, что для схемы NPN требуются два изолированных дворника, подключенных к спусковому крючку, где для схемы, использующей транзисторы PNP, нужен только один стеклоочиститель. | |
| Зачем нужен NPN
транзистор? Если все, что вам нужно сделать, это заменить падение 1,2 В на 0,6 В, зачем идти? к дополнительному усложнению двух изолированных дворников, затем транзисторов PNP может быть использован. Эти цепи не имеют защиты от перегрузки по току. Если есть короткое цепь на дорожке, полная мощность идет через транзистор. Чтобы решить эту проблему, используйте транзистор с действительно большим током. рейтинг. В прошлом промышленность транзисторов производила только действительно большие токи. рейтинг транзисторов в NPN, в какой-то степени это все еще верно, но PNP транзисторы, такие как MJ14003 потребует 60 ампер.Взглянем на пару электронных в каталогах поставщика указано несколько типов NPN с текущими номиналами в диапазон от 60 до 100 ампер. Не могли бы вы использовать несколько транзисторов параллельно, чтобы получить действительно высокий текущий рейтинг? Ну да, вы могли бы, НО это маловероятно работать хорошо, потому что транзисторы редко делят ток поровну при простом подключении параллельно, и по мере того, как они нагреваются, распределение становится менее равным. (Их можно было бы заставить делить ток намного лучше, поставив 0.Резистор 1 ом в эмиттерном выводе каждого транзистора). | |
| Приведенное выше объяснение
упрощенный? Боюсь так! Напряжение от b до e не совсем 0,6 вольт. Он уменьшается по мере того, как температура увеличивается. Он увеличивается с увеличением тока. Это не идентично в все транзисторы (даже не в паре с одинаковым номером детали транзистор). Я упростил обследование, сказав, что ток, идущий на базу,
мал по сравнению с током, проходящим через регулировку чувствительности
резистор.Если базовый ток значительный, то падение напряжения
от + напряжение к базе будет больше. Следовательно, напряжение
Падение на контроллере увеличивается по мере увеличения базового тока. Этот
зависит от размера базы тока относительно тока эмиттера. В
соотношение между этими токами известно как коэффициент усиления транзистора, если
посмотрите таблицы свойств транзисторов, они часто обозначаются как «hfe».
Это может быть от 1000 до 2000 для «пары Дарлингтона» и от 80 до 150.
для одиночного транзистора. Так имеют ли значение все эти дополнительные сложности? Меняются ли характеристики машины во время гонки? | |
Все товары | Schneider Electric
Доступ к энергии
Автоматизация и управление зданиями
Критическая мощность, охлаждение и стойки
Промышленная автоматизация и управление
Низковольтные изделия и системы
Распределение среднего напряжения и автоматизация сетей
Жилой и малый бизнес
Солнечные батареи и накопители энергии
Регулятор скорости двигателя постоянного тока с использованием силового транзистора 2SC2625
Что такое регулятор скорости двигателя постоянного тока?
Для управления скоростью и направлением двигателей переменного / постоянного тока можно использовать множество различных методов.Контроллер скорости двигателя постоянного тока позволяет инженерам и техническим специалистам управлять скоростью и направлением приводов переменного / постоянного тока в таких отраслях, как текстильная, механическая и электрическая, для различных производственных процессов. В сегодняшнем руководстве мы разработаем контроллер скорости двигателя постоянного тока с использованием силового транзистора 2SC2625.
Сердцем этой схемы является силовой транзистор 2SC2625. 2SC2625 — это высоковольтный высокоскоростной переключающий транзистор. Это NPN-транзистор в корпусе TO-39, обеспечивающий максимальное напряжение коллектор-база 450 В и рассеиваемый ток коллектора 80 Вт, поэтому во время работы транзистора используйте соответствующий радиатор.
Мы чрезвычайно благодарны JLCPCB за спонсирование проектов на этом веб-сайте и канале YouTube. JLCPCB — ведущая компания по производству прототипов печатных плат в Китае, предоставляющая нам лучший сервис, который мы когда-либо испытывали (качество, цена, обслуживание и время). Мы настоятельно рекомендуем заказывать печатные платы в JLCPCB. Все, что вам нужно сделать, это просто загрузить файл Gerber и загрузить его на веб-сайт JLCPCB после создания учетной записи, как указано в видео выше, посетите их веб-сайт, чтобы узнать больше! .
Требуемое оборудование
Для сборки этого проекта вам потребуются следующие детали:
2SC2625 Распиновка
Двигатель постоянного тока
Полезные шаги
1) Припаяйте базу и вывод коллектора транзистора 2SC2625 к дворнику и неподвижному концу потенциометра 10K соответственно.
Чтобы купить печатные платы на заказ по удивительно низким ценам 2 доллара за 5 печатных плат, посетите: www.jlcpcb.com
2) После этого припаяйте положительную и отрицательную клеммы 3.Аккумулятор 7 В постоянного тока с базовым выводом транзистора и фиксированным концом потенциометра 10 кОм соответственно.
3) Припаяйте положительную клемму электродвигателя постоянного тока без сердечника к эмиттеру транзистора. После этого припаяйте отрицательную клемму двигателя постоянного тока с фиксированным концом потенциометра 10K и отрицательной клеммой переходника батареи постоянного тока.
4) Присоедините лопасти вентилятора к валу двигателя постоянного тока. Проверьте схему, медленно увеличивая сопротивление потенциометра 10 кОм, поворачивая ручку.Скорость вращения болельщиков будет увеличиваться по мере того, как вы увеличиваете ценность банка в 10 тысяч.
Рабочее объяснение
Эта схема работает следующим образом. Предустановленный потенциометр 10K устанавливает управляющий сигнал на базе силового транзистора 2SC2625. При повороте ручки предварительно установленного потенциометра сопротивление потенциометра увеличивается, в результате чего увеличивается управляющий сигнал на базе силового транзистора. Выход коллектора затем позволяет валу двигателя постоянного тока вращаться, и двигатель набирает скорость.
При уменьшении предварительно установленного пост-сопротивления поворотом ручки в другую сторону управляющий сигнал на базе транзистора уменьшается, следовательно, уменьшается скорость вала (об / мин) двигателя постоянного тока, что замедляет двигатель постоянного тока.
Приложения
- Эта схема может использоваться для управления скоростью двигателей постоянного тока, которые впоследствии могут использоваться в таких приложениях, как вентиляторы постоянного тока, двигатели, беспилотные летательные аппараты и т. Д. 5 Печатных плат. Посетите: www.jlcpcb.com
См. Также: Лазерная тревожная сигнализация с натяжным тросом с использованием микросхемы таймера NE555 | Как сделать умный дверной замок с помощью пары ИК-светодиодов и серводвигателя | Контроллер / драйвер двигателя с Н-образным мостом
16-канальный PLC модуль усилителя изолированный транзисторный контроллер NPN преобразователь сигнала 16-битный PLC протектор оптопара
1.Описание:
Это 16-канальный модуль усилителя ПЛК. Он принимает управление изоляцией оптопары, выходной сигнал NPN, безопасный и надежный.
2. Особенности:
1>. Контроль изоляции оптопары
2> .16-битный выходной сигнал
3.Параметры:
1> .Рабочее напряжение: 12-36 В постоянного тока
2>. Выходное напряжение: такое же, как и входное напряжение
3>. Контрольный сигнал: сигнал низкого уровня
4>. Выходной ток: <5A
5>.Выходные каналы: 16 бит
6> .Рабочая температура: -20 ℃ ~ 85 ℃
7> .Рабочая влажность: 5% ~ 95% относительной влажности
8> .Размер: 134 * 87 * 40 мм
4. посылка:
1 шт. 16-канальный модуль усилителя PLC
Во-первых, мы должны сказать, что ICStation не принимает никаких форм оплаты при доставке. Раньше товары отправлялись после получения информации о заказе и оплаты.
1) Платеж Paypal
PayPal — это безопасная и надежная служба обработки платежей, позволяющая делать покупки в Интернете.PayPal можно использовать на icstation.com для покупки товаров с помощью кредитной карты (Visa, MasterCard, Discover и American Express), дебетовой карты или электронного чека (т. Е. С помощью обычного банковского счета).
Мы проверены PayPal2) Вест Юнион
Мы знаем, что у некоторых из вас нет учетной записи Paypal.
Но, пожалуйста, расслабься. Вы можете использовать способ оплаты West Union.
Для получения информации о получателе свяжитесь с нами по адресу [email protected].
3) Банковский перевод / банковский перевод / T / T
Банковский перевод / банковский перевод / способы оплаты T / T принимаются для заказов, общая стоимость которых составляет до долларов США, 500 долларов США . Банк взимает около 60 долларов США за комиссию за перевод, если мы производим оплату указанными способами.
Чтобы узнать о других способах оплаты, свяжитесь с нами по адресу orders @ icstation.com для более подробной информации.
Мы предлагаем БЕСПЛАТНУЮ доставку по всему миру для всех заказов от 20 долларов США!
1. Авиапочта Гонконга / Сингапура
(1) Стоимость доставки: $ 3
Все заказы будут отправлены стандартной обычной почтой с номером отслеживания, который можно отследить на сайте.Если общая цена превышает 20 долларов США, товары будут отправлены бесплатно.
То есть клиенту не нужно доплачивать 3 доллара США за зарегистрированную стоимость доставки.
(2) Время доставки
Время доставки составляет 7-20 рабочих дней в большинство стран; Пожалуйста, просмотрите приведенную ниже таблицу, чтобы точно узнать время доставки к вам.7-15 рабочих дней в: большинство стран Азии
10-16 рабочих дней в: США, Канаду, Австралию, Великобританию, большинство стран Европы
13-20 рабочих дней в: Германию, Россию
18-25 рабочих дней Кому: Франция, Италия, Испания, Южная Африка
20-45 рабочих дней Кому: Бразилия, большинство стран Южной Америки2.EMS / DHL / FedEx Express
(1) Стоимость доставки: Бесплатно для заказа, который соответствует следующим требованиям
Общая стоимость заказа> = 200 долларов США или Общий вес заказа> = 2.2 кгКогда заказ соответствует одному из вышеуказанных требований, он будет отправлен БЕСПЛАТНО через EMS / DHL / FedEx Express в указанную ниже страну.
Азия: Япония, Южная Корея, Монголия. Малайзия, Сингапур, Таиланд, Вьетнам, Камбоджа, Индонезия, Филиппины
Океания: Австралия, Новая Зеландия, Папуа-Новая Гвинея
Европа и Америка: Бельгия, Великобритания, Дания, Финляндия, Греция, Ирландия, Италия, Люксембург, Мальта, Норвегия, Португалия, Швейцария, Германия, Швеция, Франция, Испания, США, Австрия, Канада
Примечание. Стоимость доставки в другие страны, пожалуйста, свяжитесь с orders @ ICStation.com(2) Время доставки
Время доставки составляет 3-5 рабочих дней (около 1 недели) в большинство стран.Поскольку посылка будет возвращена отправителю, если она не была подписана получателем в течение 2-3 дней (DHL), 1 недели (EMS) или 2 недель (заказное письмо), обратите внимание на время прибытия. пакета.
Примечание:
1) Адреса АПО и абонентского ящика
Мы настоятельно рекомендуем вам указать физический адрес для доставки заказа.
Потому что DHL и FedEx не могут доставлять товары по адресам APO или PO BOX.
2) Контактный телефон
Контактный телефон получателя требуется агентству экспресс-доставки для доставки посылки. Сообщите нам свой последний номер телефона.
3. Примечание
1) Время доставки смешанных заказов с товарами с разным статусом доставки следует рассчитывать с использованием самого длительного из перечисленных ориентировочных сроков.
2) Напоминание о китайских праздниках: во время ежегодных китайских праздников могут быть затронуты услуги определенных поставщиков и перевозчиков, а доставка заказов, размещенных примерно в следующее время, может быть отложена на 3–7 дней: китайский Новый год; Национальный день Китая и т. Д.
3) Как только ваш заказ будет отправлен, вы получите уведомление по электронной почте от icstation.com.
4) Отследите заказ с номером отслеживания по ссылкам ниже:Что такое транзистор и как использовать транзистор
Транзистор, пожалуй, самый важный из электронных компонентов, из-за которого работает вся современная электроника.Поэтому становится не только важным, но и обязательным знать, что такое транзистор и как работает транзистор. Транзистор — это полупроводниковое устройство, обычно используемое для усиления или переключения электронных сигналов. Это устройство с тремя выводами, в котором один вывод можно использовать для управления прохождением тока через два других вывода. Три терминала — Эмиттер, База и Коллектор. В основном он используется в качестве усилителя для усиления различных сигналов, а также для автоматического переключения.
3 Основные области применения транзисторов:
- В качестве переключателя
- В качестве усилителя
- В качестве генератора
В этом руководстве мы увидим, как использовать транзистор в качестве переключателя
Есть 2 типа биполярных транзисторов, которые мы в основном используем в общих приложениях.
NPN
что такое транзистор NPN
Когда база n-p-n соединена с высоким логическим напряжением (положительное напряжение), то происходит короткое замыкание эмиттера и коллектора (ВКЛЮЧЕНИЕ). Когда база n-p-n соединена с низким логическим напряжением (заземление источника питания), она размыкает цепи и эмиттер, и коллектор (ВЫКЛЮЧЕНИЕ).
Транзистор NPN в качестве переключателя (коллектор к заземлению, нагрузка подключена к клемме напряжения и коллектор) GND, устройство отключает
PNP
что такое PNP-транзистор
Когда база pnp соединена с высоким логическим напряжением, он размыкает эмиттер и коллектор схемы (ВЫКЛЮЧЕНИЕ).Когда база p-n-p подключена к низкому логическому напряжению, то происходит короткое замыкание как эмиттера, так и коллектора (ВКЛЮЧЕНИЕ).
Еще один момент, о котором следует помнить, — это то, что стрелка всегда указывает в направлении потока положительного заряда или от секций P к N, независимо от того, является ли секция P эмиттером или базой.
Помимо обозначений, три контакта — база, эмиттер, коллектор — обычно помечены в технических данных транзистора. выключатель.Мы увидим, как мы можем использовать транзистор NPN в качестве переключателя
Подключение транзистора PNP
Транзистор PNP в качестве переключателя
Пример транзистора с зуммером
При сопряжении зуммера с микроконтроллером нам часто требуется большой зуммер для генерации тонов. В таких случаях зуммер не может быть напрямую подключен к контактам Arduino. Некоторые зуммеры издают громкие звуки при напряжении 12 В или выше. Чтобы связать такой зуммер с Arduino или Raspberry Pi, мы используем транзисторный переключатель, который соединяет зуммер с микроконтроллером.Ниже приведена схема использования транзисторного зуммера с контроллерами.
транзистор и зуммер
Обычно используемые транзисторы и их выводы
BC548 / BC547: — NPN
BC557: — PNP
2N3904: — NPN
SL1008 Это руководство для 9: — тем, кто занимается встраиваемыми приложениями и хочет изучить, как связать устройства постоянного тока высокой мощности с контроллером или Raspberry Pi.
Помните, что номинальный ток транзистора также следует принимать во внимание при проектировании вашей схемы.Если ваша нагрузка потребляет около 2 ампер тока, не выбирайте BC547, просто посмотрите на NPN-транзистор, у которого номинальный ток коллектора превышает 2 ампера и так далее.Наконец, не говоря уже о том, что транзисторы могут использоваться только для ПЕРЕКЛЮЧЕНИЯ нагрузок постоянного тока
Для всего, что связано с нагрузкой переменного тока, транзисторы не следует использовать напрямую для включения устройств переменного тока. По той простой причине, что транзисторы не могут работать с переменным током, потому что они являются активными устройствами. А во-вторых, он не предназначен для работы при таком высоком напряжении, он немедленно сгорит.Итак, я надеюсь, вы получили небольшое представление о том, что такое транзистор и как вы можете начать использовать его в своих проектах. Дайте мне знать, если вам понадобятся какие-либо дополнения к этому короткому руководству.
% PDF-1.3 % 365 0 объект > эндобдж xref 365 180 0000000016 00000 н. 0000003970 00000 н. 0000004093 00000 п. 0000005407 00000 н. 0000005565 00000 н. 0000005631 00000 н. 0000005760 00000 н. 0000005887 00000 н. 0000005948 00000 н. 0000006094 00000 н. 0000006240 00000 н. 0000006401 00000 п. 0000006495 00000 н. 0000006656 00000 п. 0000006771 00000 н. 0000006899 00000 н. 0000007060 00000 п. 0000007162 00000 н. 0000007324 00000 н. 0000007444 00000 п. 0000007556 00000 н. 0000007689 00000 н. 0000007850 00000 н. 0000007972 00000 н. 0000008086 00000 п. 0000008218 00000 н. 0000008355 00000 н. 0000008490 00000 н. 0000008615 00000 н. 0000008748 00000 н. 0000008878 00000 н. 0000009009 00000 н. 0000009137 00000 п. 0000009270 00000 п. 0000009431 00000 н. 0000009548 00000 н. 0000009662 00000 н. 0000009823 00000 п. 0000009938 00000 н. 0000010045 00000 п. 0000010183 00000 п. 0000010318 00000 п. 0000010450 00000 п. 0000010584 00000 п. 0000010711 00000 п. 0000010872 00000 п. 0000010983 00000 п. 0000011090 00000 п. 0000011251 00000 п. 0000011365 00000 п. 0000011485 00000 п. 0000011623 00000 п. 0000011784 00000 п. 0000011874 00000 п. 0000012035 00000 п. 0000012152 00000 п. 0000012277 00000 п. 0000012418 00000 п. 0000012548 00000 п. 0000012676 00000 п. 0000012820 00000 п. 0000012981 00000 п. 0000013077 00000 п. 0000013238 00000 п. 0000013349 00000 п. 0000013461 00000 п. 0000013592 00000 п. 0000013753 00000 п. 0000013869 00000 п. 0000013979 00000 п. 0000014108 00000 п. 0000014246 00000 п. 0000014407 00000 п. 0000014513 00000 п. 0000014642 00000 п. 0000014782 00000 п. 0000014927 00000 п. 0000015088 00000 п. 0000015207 00000 п. 0000015318 00000 п. 0000015458 00000 п. 0000015580 00000 п. 0000015741 00000 п. 0000015864 00000 п. 0000015982 00000 п. 0000016118 00000 п. 0000016252 00000 п. 0000016383 00000 п. 0000016507 00000 п. 0000016642 00000 н. 0000016756 00000 п. 0000016876 00000 п. 0000016997 00000 н. 0000017130 00000 п. 0000017245 00000 п. 0000017356 00000 п. 0000017499 00000 п. 0000017649 00000 п. 0000017786 00000 п. 0000017922 00000 п. 0000018043 00000 п. 0000018102 00000 п. 0000018255 00000 п. 0000018411 00000 п. 0000018582 00000 п. 0000018749 00000 п. 0000018865 00000 п. 0000018996 00000 п. 0000019132 00000 п. 0000019316 00000 п. 0000019455 00000 п. 0000019591 00000 п. 0000019734 00000 п. 0000019920 00000 п. 0000020093 00000 п. 0000020252 00000 п. 0000020380 00000 п. 0000020515 00000 п. 0000020709 00000 п. 0000020834 00000 п. 0000020994 00000 п. 0000021191 00000 п. 0000021315 00000 п. 0000021453 00000 п. 0000021623 00000 п. 0000021763 00000 п. 0000021931 00000 п. 0000022099 00000 н. 0000022289 00000 п. 0000022434 00000 п. 0000022557 00000 п. 0000022701 00000 п. 0000022878 00000 п. 0000023024 00000 п. 0000023208 00000 п. 0000023348 00000 п. 0000023485 00000 п. 0000023636 00000 п. 0000023790 00000 п. 0000023935 00000 п. 0000024067 00000 п. 0000024220 00000 п. 0000024358 00000 п. 0000024495 00000 п. 0000024644 00000 п. 0000024775 00000 п. 0000024939 00000 п. 0000025117 00000 п. 0000025249 00000 п. 0000025382 00000 п. 0000025536 00000 п. 0000025725 00000 п. 0000025872 00000 п. 0000026018 00000 п. 0000026164 00000 п. 0000026282 00000 п. 0000026404 00000 п. 0000026550 00000 п. 0000026729 00000 н. 0000026920 00000 н. 0000027048 00000 п. 0000027163 00000 п. 0000027307 00000 п. 0000027495 00000 п. 0000027625 00000 п. 0000027739 00000 п. 0000027896 00000 н. 0000028084 00000 п. 0000028253 00000 п. 0000028717 00000 п. 0000029354 00000 п. 0000029892 00000 п. 0000030737 00000 п. 0000036705 00000 п. 0000037131 00000 п. 0000037261 00000 п. 0000037945 00000 п. 0000038768 00000 п. 0000004236 00000 п. 0000005384 00000 п. трейлер ] >> startxref 0 %% EOF 366 0 объект > эндобдж 367 0 объект 飯 NuΔ $ \ nýg9Y \\ = q! P; W) / U (Q = \ n_-Sj {uz> BpdT) / П -44 >> эндобдж 543 0 объект > транслировать C! BXoL // ‘nK / ɴf WQ / `
x360ce.Пошаговая инструкция по установке эмулятора.
В этом руководстве вы найдете шаги, чтобы заставить x360ce работать с Transistor. Этот метод также работает с любой игрой — просто выполняйте те же простые действия, не требуя специальных навыков, чтобы заставить любой контроллер работать как геймпад Xbox 360. Эмулятор позволяет вашему контроллеру (джойстику, рулю, геймпаду и т. Д.) Работать как наиболее распространенному устройству, распознаваемому большинством игр, без каких-либо дополнительных настроек и обходных путей.
1.Первым делом нужно скачать zip файл x360ce с официального сайта. Вы должны выбрать 32- или 64-битную версию (такую же, как используемая вами версия Transistor). Если вы не знаете версию своей игры или случайно загрузили неправильную версию, вы получите уведомление позже и сможете использовать другую версию.
2. Теперь нам нужно в найти папку с установкой вашей игры . Вы можете легко сделать это, просмотрев настройки ярлыка игры или найдя игру в списке библиотеки Steam.Если вы выбрали вариант Steam, щелкните название игры правой кнопкой мыши и выберите «Свойства».
3. Перейдите на вкладку «Локальные файлы» и нажмите кнопку «Обзор локальных файлов …» .
4. Теперь вам нужно найти папку с исполняемым файлом Transistor . На картинке-примере они расположены в подпапке Binaries / Retail. Вам необходимо распаковать загруженный ZIP-файл x360ce в папку с исполняемым файлом игры.
5. Щелкните файл x360ce exe правой кнопкой мыши и выберите «Запуск от имени администратора» из раскрывающегося меню.
6. Вы увидите окно с предупреждением — «xinput 1_3.dll не найден. Этот файл необходим для правильной работы эмулятора ». Не волнуйтесь, , просто нажмите кнопку «Создать», , чтобы они появились.
7. Когда x360ce сообщит вам об обнаружении нового устройства, воспользуется автоматическим поиском настроек из Интернета — просто нажмите кнопку «Далее».
8. Нажмите «Готово» , когда установка будет завершена.
9. Нажмите кнопку «Авто» , чтобы установить все настройки по умолчанию. Подтвердите изменения, нажав «Да» во всплывающем окне. Все кнопки заполнятся автоматически.
10. Теперь просто нажмите кнопку «Сохранить» , чтобы сохранить все ваши настройки. Вы также можете изменить назначение кнопок, прежде чем нажать «Сохранить», если хотите.
Теперь вы можете нормально запустить Transistor и использовать свой контроллер с эмулятором x360ce — он будет запускаться автоматически при каждом запуске игры.
.