


Конструктивное исполнение асинхронных двигателей
Конструктивное исполнение асинхронных двигателей определяется способом их крепления и видом защиты от воздействия окружающей среды.
Н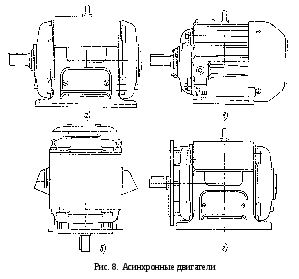 аиболее
часто в литейных машинах применяют
двигатели нормального исполнения с
креплением на лапках (рис. 8,а,
в). По
техническим условиям такие двигатели
устанавливают только с горизонтальным
расположением вала. С машиной эти
двигатели, как правило, соединяют
упругими муфтами.
аиболее
часто в литейных машинах применяют
двигатели нормального исполнения с
креплением на лапках (рис. 8,а,
в). По
техническим условиям такие двигатели
устанавливают только с горизонтальным
расположением вала. С машиной эти
двигатели, как правило, соединяют
упругими муфтами.
Выпускаемые отечественной промышленностью фланцевые двигатели (рис. 8, б) могут быть установлены как горизонтально, так и вертикально. Двигатели присоединяют к машине с помощью фланца на подшипниковом щите по переходной посадке, что позволяет применять жесткие муфты. Выпускаются также двигатели со станиной на лапках и дополнительным фланцевым щитом (рис. 8, г) и встроенные двигатели, не имеющие ни вала, ни станины, ни подшипниковых щитов. Последние монтируют в корпусах производственных машин, например в шлифовальных станках для заточки отливок, в приводных барабанах ленточных транспортеров, в ручном электрическом инструменте и т. д.
В зависимости от вида защиты от воздействия окружающей среды различают защищенные, закрытые, закрытые обдуваемые и взрывобезопасные двигатели. Наибольшее применение в литейных машинах находят закрытые обдуваемые двигатели (рис. 8, в). Подшипниковые щиты такого двигателя вентиляционных отверстий не имеют. Для улучшения условий охлаждения двигатель снабжен наружным вентилятором, закрытым кожухом. Иногда для приводов литейных машин (в отделениях окраски отливок) применяют герметически закрытые взрывобезопасные двигатели с корпусом повышенной прочности.
Двигатели рассчитаны на стандартные напряжения 127, 220, 380, 500 в. Единой серией асинхронных двигателей А2, АО2 предусмотрены двигатели с короткозамкнутым ротором девяти габаритов мощностью 0,6…100 кВт на синхронные скорости вращения 600, 750, 1000, 1500 и 3000 об/мин. Размеры асинхронных двигателей определяются значениями тока и магнитного потока, а, следовательно, согласно выражению (7) номинальным моментом двигателя. При одинаковой мощности тихоходные двигатели имеют большие размеры и соответственно большую стоимость.
П рименение
встроенных двигателей позволяет
уменьшить габаритные размеры и массу
машины и сделать ее весьма компактной.
Недостатком встроенных двигателей
является сложность их ремонта и замены.
В качестве примера на рис. 9 приведена
схема получившей распространение
конструкции приводного барабана
ленточного транспортера со встроенным
двигателем.
рименение
встроенных двигателей позволяет
уменьшить габаритные размеры и массу
машины и сделать ее весьма компактной.
Недостатком встроенных двигателей
является сложность их ремонта и замены.
В качестве примера на рис. 9 приведена
схема получившей распространение
конструкции приводного барабана
ленточного транспортера со встроенным
двигателем.
Статор 1 через корпус 3 и фланец жестко связан с неподвижной цапфой 4 барабана. Вал короткозамкнутого ротора 2 имеет эксцентрик и одновременно является водилом планетарного редуктора с большим передаточным отношением. Фланец цапфы
Асинхронные двигатели дешевы, просты, надежны и удобны в эксплуатации. Поэтому необходимость применения двигателя иного типа должна быть достаточно обоснована технически и экономически. Технико-экономическое обоснование по существу необходимо и при выборе скорости вращения двигателя, чтобы общая стоимость машины была минимальной. Однако механические передачи литейных машин, изготовляемые в мелкосерийном и единичном производстве, дороже, чем тихоходные электродвигатели, изготовляемые в массовом и крупносерийном производстве.
Конструкция и принцип действия двигателя постоянного тока.
В качестве исполнительных элементов во многих устройствах автоматики: в радиоэлектронных, оптических, механических, а также и портативных аппаратах, снабжённых автономными источниками электрической энергии, широко используются электродвигатели постоянного тока. Эти двигатели имеет ряд преимуществ перед другими видами ИЭ: линейность механических характеристик (ДПТ), хорошие регулировочные свойства, большой пусковой момент, высокое быстродействие, большой диапазон по мощность различных типов ДПТ и хорошие весогабаритные показатели.
Конструкция ДПТ. Конструктивно ДПТ состоит из статора (неподвижной части) и ротора или якоря (вращающейся части), помещённого внутри статора. Упрощённо конструкцию машины можно пояснить с помощью рис.61.
Статор состоит из стальной станины 1, на внутренней поверхности которой расположены главные полюса, состоящие из сердечников 2 и катушек возбуждения 3. В нижней части сердечника полюса имеется полюсный наконечник 4, который обеспечивает нужное распределение магнитной индукции в воздушном зазоре машины. К станине с торцевых сторон прикреплены подшипниковые щиты ( на рис. 61 не показаны ), к одному из которых прикреплены щёткодержатели с металлографитовыми щётками 9.

Рис. 61. Конструкция ДПТ.
Ротор( якорь ) ДПТ состоит из сердечника 5, обмотки якоря 6, коллектора 7 и вала 8.
Сердечник 5 представляет собой цилиндр, набранный из штампованных листов электротехнической стали, с отверстием под вал двигателя и с пазами, в которых укладываются проводники обмотки якоря.
Коллектор 7 – цилиндр, набранный из медных пластин трапециевидного сечения, изолированных электрически друг от друга и от вала двигателя.
Обмотка якоря машины представляет собой замкнутую систему проводников, уложенных и укреплённых в пазах сердечника 5. Она состоит из секций (катушек), выводы которых соединены с двумя коллекторными пластинами. У микромашин обычного исполнения с одной парой полюсов на статоре обмотка якоря представляет собой простую петлевую обмотку (схема рис.62), при построении которой выводы секций обмоток присоединяются к двум соседним коллекторным пластинам, а число секций обмотки и число коллекторных пластин коллектора одинаково.

Рис. 62. Схема обмотки якоря ДПТ.
Обмотка, схема которой приведена на рис. 62, содержит 4 секции, каждая из которых состоит из активных сторон 1, располагающихся в пазах сердечника и лобовых частей 2, посредством которых активные стороны секций соединяются между собой и с коллекторными пластинами. Чтобы ЭДС, наводимые в активных сторонах секций складывались, необходимо расположить активные стороны одной секции в пазах сердечника, отстоящих друг от друга на расстоянии полюсного деления t
Электромагнитный момент ДПТ. Принципдействия ДПТ основан на взаимодействии тока проводников обмотки якоря с магнитным полем возбуждения, в результате чего на каждый проводник обмотки якоря действует электромеханическая сила, а совокупность сил, действующих на все активные проводники обмотки, образует электромагнитный момент машины. Пусть у нас есть рамка с током, помещенная в поле постоянного магнита. Рис. 63.
На каждый проводник с током, помещенный в магнитное поле машины действует электромагнитная сила:
 ,
,
где l- длина активного проводника, B — индукция в данной точке воздушного зазора, i – ток в проводнике. Пусть каждая сторона рамки содержит число параллельных ветвей обмотки 2а. Тогда ,если через щетки машины протекает ток Iя , называемый током якоря, то через каждый проводник обмотки якоря протекает ток:
 .
.
Совокупность сил действующих на все N проводников рамки приводит к возникновению результирующего электромагнитного момента машины:

Рис. 63. Принцип действия ДПТ.
 .
.
Пусть, у рассматриваемого ДПТ имеется 2р полюсов (в большинстве случаев в микромашинах 2р = 2, т. е.число пар полюсов р = 1). Расстояние по окружности якоря между серединами смежных полюсов называется полюсным делением t . Очевидно, что
 , где d– диаметр рамки.
, где d– диаметр рамки.
После подстановки получим:
 или
или  ,
,
где  это — электромагнитная конструктивная постоянная машины.
это — электромагнитная конструктивная постоянная машины.
Таким образом, электромагнитный момент, развиваемый ДПТ пропорционален магнитному потоку Ф и току якоря машины Iя. При вращении ротора (якоря) должно выполняться условие равенства моментов:
М=Мн+Мп+Мд,
где Мн – момент полезной нагрузки, Мп – момент потерь и
 — динамический момент. Динамический момент равен нулю в статике, больше нуля при разгоне двигателя и меньше при торможении.
— динамический момент. Динамический момент равен нулю в статике, больше нуля при разгоне двигателя и меньше при торможении.
Электродвижущая сила ДПТ. При вращении ротора ДПТ в каждом активном проводнике обмотки якоря, пересекающем нормальные к его поверхности силовые линии магнитного поля полюсов наводятся ЭДС. Направление ЭДС определяется по правилу правой руки; величина ЭДС определяется выражением
e=Blv,
где l длина активного проводника, B — индукция в данной точке воздушного зазора, v — линейная скорость перемещения проводника относительно линий нормальной к поверхности ротора индукции. При этом при вращении ротора ЭДС в каждом проводнике является периодической переменной во времени величиной.
ЭДС якоря машины равна алгебраической сумме ЭДС проводников, образующих одну параллельную ветвь машины. Каждая параллельная ветвь представляет собой группу последовательно соединённых секций, ток в которых имеет одинаковое направление. Для простой петлевой обмотки число параллельных ветвей 2а всегда равно числу полюсов 2р.
Таким образом, для двухполюсной машины обмотка якоря по отношению к щёткам имеет две параллельных ветви, ЭДС в проводниках которых направлены согласно. Несмотря на то, что при вращении ротора всё новые и новые проводники будут образовывать параллельные ветви, направление ЭДС в проводниках, а также направление суммарной ЭДС параллельной ветви или ЭДС якоря Ея остаётся неизменной при неизменном направлении вращения ротора.
Поскольку число активных проводников параллельной ветви весьма велико, то, несмотря на пульсирующий характер ЭДС каждого из проводников суммарная ЭДС (E) остается практически постоянной при постоянной скорости вращения ротора. В таком случае можно воспользоваться значением средней индукции в воздушном зазоре машины Вср и найти ЭДС.
 , также
, также  и
и  .
.
Зная, что линейная скорость равна v=w∙R==w∙d/2, где w — угловая частота вращения ротора в рад/с, d — диаметр ротора, получим

Величина полезного магнитный поток полюса Ф может быть определена как,  ,
,
где — полюсное деление, а l*t — площадь, которую пронизывает этот поток.
Тогда
 , где
, где  — электрическая конструктивная постоянная машины.
— электрическая конструктивная постоянная машины.
Для системы СИ обе конструктивные постоянные численно совпадают: См = Се.Таким образом, ЭДС якоря машины пропорциональна величине магнитного потока полюсов и частоте вращения ротора. При постоянном магнитном потоке Ф ЭДС якоря машины пропорциональна частоте вращения ротора, т.е.  , что дает возможность использовать такую машину в качестве датчика частоты вращения или тахогенератора.
, что дает возможность использовать такую машину в качестве датчика частоты вращения или тахогенератора.
Способы регулирования ДПТ. Скорость вращения ДПТ может осуществляться следующим образом:
1) По возбуждению. Изменяя ток обмотки возбуждения (магнитный поток машины) через управляемый выпрямитель, импульсным способом или с помощью дополнительных сопротивлений, меняем насыщение магнитной системы. Изменение магнитного потока производится только вниз, критический момент развиваемый двигателем падает, а скорость ω0 возрастает, механическая характеристика такой машины является мягкой.
2) По якоря (с помощью дополнительных сопротивлений, через управляемый выпрямитель или импульсным способом) изменяя ток якоря. Изменение тока якоря производится только вниз, критический момент развиваемый двигателем не меняется, скорость ω0 не меняется, а механическая характеристика такой машины является жесткой.
3) По цели управления (момент на валу двигателя, скорость, время)
Для реализации этих задач могут использоваться электромеханические системы и электронные системы управления.
Электромеханические системы в основном используются для разгона и торможения двигателя. Электронные для стабилизации и регулирования параметров электропривода (момент, скорость), при этом в схемах управления электроприводом, используются положительные и отрицательные обратные связи.
Система регулирования скорости.Упрощенная структурная схема системы ТП—ДПТ НВ представлена на рис. 3.66, а, где элементы привода — преобразователь П и ДПТ М представлены своими передаточными функциями, kn и Тп — коэффициент усиления и постоянная времени преобразователя; Тя и Тм — постоянные времени соответственно цепи ДПТ и механической части привода.
Расчет и проектирование схемы управления электроприводом по принципу последовательной коррекции начинают с построения контура тока. Для этого в цепь управления вводится регулятор тока РТ (рис. 3.66, б) с неизвестной пока передаточной функцией WP,T) на вход ко торого подаются сигналы задающей U З.Т и отрицательной обратной связи по току UО.Т. =kT I.
Искомая передаточная функция регулятора тока WP.T ищется путем приравнивания желаемой передаточной функции разомкнутого оптими зированного контура (3.146) и передаточной функции Wраз.Т образованной регулятором тока РТ, преобразователем П и якорем ЦЯ (П и ЦЯ образуют объект регулирования, для контура тока с передаточной функцией W0.Т),-



Рис. 3.66. Система регулирования скорости, построенная по принципу последовательной коррекции: ‘
а— схема электропривода; б — образование контура тока; в— образование «контура скорости

откуда получаем


Обычно принимают постоянную времени контура тока  равной небольшой (около 0,01 c) постоянной времени преобразователя Тя
равной небольшой (около 0,01 c) постоянной времени преобразователя Тя
Тогда передаточная функция регулятора тока принимает вид
 (3.150)
(3.150)
,где  =
=  /RЯ — постоянная времени регулятора.
/RЯ — постоянная времени регулятора.
Из (3.150) видно, что регулятор, тока для рассматриваемого случая представляет собой пропорционально-интегральный (ПИ) регулятор.
 (3.151)
(3.151)
Т.е. замкнутый контур представляет собой систему второго порядка с малой постоянной времени Тп. Другими словами, введение регулятора тока с передаточной функцией, вида (3.150) позволило скомпенсировать большую постоянную времени цепи якоря Тя и обеспечить оптимальный характер переходных процессов с отмеченными ранее показателями.
После расчета .контура тока производится расчет и построение контура скорости. Для этого в систему вводятся регулятор скорости PC с неизвестной пока передаточной функцией Wр,c и отрицательная обратная связь по скорости с коэффициентом kс (рис. 3.66, в). После образования контура скорости контур тока, представленный на рис. 3.65, в передаточной, функцией W3aмT, оказался внутренним (подчиненным) для контура скорости, так как управляющий сигнал Uзт на регулятор тока поступает c выхода регуляторf скорости.
Передаточную функцию регулятора скорости определяют, как и для регулятора тока, по передаточной функции объекта регулирования скорости W0C состоящему из контура тока и механической части привода, и желаемой передаточной функции разомкнутой системы регулирования скорости W раз,с.
Если пренебречь в (3.151) членом второго порядка 2TП2p2 то передаточная функция W0,c примет вид
 (3.152)
(3.152)
Желаемая передаточная функция разомкнутой системы W раз,с. oпределяется выражением (3.146) при подстановке в него k о,c=kс и Тм =2ТП
 (3.153)
(3.153)
Разделив выражение (3.153) на (3.152), получим искомую передаточную функцию регулятора скорости Wpc

б) Техническая реализация систем подчиненного регулирования
Широкому распространению систем подчиненного регулирования способствует помимо отмеченных достоинств выпуск промышленностью унифицированной блочной системы регуляторов (УБСР).
Эта система имеет несколько ветвей: аналоговую, выполняемую; на обычных элементах электроники УБСР-А и на интегральных микросхемах УБСР-АИ/ и цифровую — на обычных элементах УБСР-Д и на интегральных микросхемах УБСР-ДИ
Аналоговая ветвь УБСР-А состоит из небольшого количества элементов— транзисторных усилителей постоянного тока, датчиков регулируемых параметров и командных задающих устройств, функциональных преобразователей и источников питания. В системе принят электрический сигнал постоянного тока напряжением 0 ±24 В, 0 ±10 мА, что позволяет собирать элементы системы в разных сочетаниях и выполнять их на базе серийных транзисторов общего назначения
Основным элементом системы, с помощью которого выполняются схемы различных регуляторе электропривода, служит операционный усилитель постоянного тока УПТ-3 с высоким коэффициентом усиления (более 1000) и относительно малым дрейфом нуля
Вторым типом усилителя системы УБСР-А является усилитель мощности У ПТ-5, предназначенный для работы с внешними исполнительными устройствами с параметрами входных сигналов, отличающимися от принятых в системе. Кроме того, усилитель УПТ-5 можно использовать в качестве операционного.
При введении соответствующих обратных связей операционный усилитель может обеспечивать масштабное преобразование (усиление или ослабление) входной величины, ее интегрирование или дифференцирование, а также осуществлять пропорционально-интегральный (ПИ) и интегрально-пропорционально-дифференциальный (ИПД) законы управления электроприводом
Для примера на рис. 3.68 показаны схемы П- и ПИ-регуляторов, собранных на базе операционного усилителя ОУ. Сигнал на выходе П-регулятора (рис. 3.68, а) пропорционален входному, т. е. Uвых=kвх, где k=R o.c/Ru откуда передаточная функция П-регулятора

Сигнал на выходе ПИ-регулятора (рис. 3.68, б) пропорционален входному сигналу и интегралу от входного сигнала, т. е

где – T0 =Roc C, k= Roc / R1
Передаточная функция ПИ-регулятора, соответствующая выражению (3.158), имеет вид

где – TИ =Т0 / k = R1 C,
Рассмотрим порядок расчета параметров регуляторов системы с подчиненным регулированием координат, реализуемых на базе операционных усилителей. Основой этого расчета является условие эквивалентности требуемых передаточных функций регуляторов тока (3.150) и скорости (3.154) и передаточных функций ПИ-регулятора (3.159) и П регулятора (3.157). Для реализации передаточной функции регулятора тока вида (3.150) параметры ПИ-регулятора (рис. 3.68,6) должны удовлетворять следующим условиям,



Рис. 3.68. К технической реализации электропривода с подчиненным регулированием координат а — схема П-регулятора скорости; б — схема ПИ-регулятора тока; в— структурная схема электропривода
которые после несложных преобразований можно представить в виде
 (3.361)
(3.361)
Для реализации передаточной функции регулятора скорости вида (3,154) параметры П-регулятора (рис. 3.68, а) должны удовлетворять следующим условиям
k =Roc-/R1=kTcTM/(4kcTПRя) = kp,c. (3.162)
На рис. 3.68, в приведена структурная схема электропривода постоянного тока с подчиненным регулированием координат. Двигатель М получает питание от управляемого вентильного преобразователя УП. На валу ДПТ установлен тахогенератор BR, вырабатывающий сигнал обратной связи по скорости U0,с=kсо. Этот сигнал поступает на вход регулятора скорости PC вместе с сигналом задания скорости U 3,с
Сигнал обратной связи по току U0,T = k T I вырабатывает датчик тока ДТ который, в свою очередь, получает сигнал с резистора Rш, включенного в цепь якоря ДПТ. Сигнал U0,т поступает на вход регулятора тока вместе с сигналом задания тока U3,т, снимаемого с выхода PC, Выходной сигнал РТ Uу поступает в СИФУ преобразователем, которая осуществляет управление его вентилями.
Ограничение тока якоря обеспечивается стабилитронами VI, V2. Задающее напряжение сигнала скорости U3C может поступать на вход системы от задатчика интенсивности или другого источника задающего сигнала

Дата добавления: 2018-04-26; просмотров: 457;
§ 30.4. Исполнительные двигатели постоянного тока
Исполнительные двигатели постоянного тока, так же как исполнительные асинхронные двигатели (см. § 17.4), применяются в системах автоматики для преобразования электрического сигнала в механическое перемещение. Помимо обычных требований, предъявляемых к электродвигателям общего назначения, к исполнительным двигателям предъявляется ряд специфических требований, из которых основными являются отсутствие самохода и малоинерционность (см. § 17.4).
Почти все исполнительные двигатели (исключение составляют лишь двигатели с постоянными магнитами) имеют две обмотки. Одна из них постоянно подключена к сети и называется обмоткой возбуждения, на другую — обмотку управления электрический сигнал подается лишь тогда, когда необходимо вызвать вращение вала. От напряжения управления зависят частота вращения и вращающий момент исполнительного двигателя, а следовательно, и развиваемая им механическая мощность.
Исполнительные двигатели постоянного тока по конструкции отличаются от двигателей постоянного тока общего назначения только тем, что имеют шихтованные (набранные из листов электротехнической стали) якорь, станину и полюсы, что необходимо для работы исполнительных двигателей в переходных режимах. Магнитная цепь исполнительных двигателей не насыщена, поэтому реакция якоря (см. § 26.2) практически не влияет на их рабочие характеристики.
В качестве исполнительных двигателей постоянного тока в настоящее время используют чаще всего двигатели с независимым возбуждением, реже — двигатели с постоянными, магнитами. У двигателей с независимым возбуждением в качестве обмотки управления используют либо обмотку якоря — двигатели с якорным управлением, либо обмотку полюсов — двигатели с полюсным управлением.
У исполнительных двигателей с якорным управлением обмоткой возбуждения является обмотка полюсов, а обмоткой управления — обмотка якоря (рис. 30.10, а). Обмотку возбуждения подключают к сети с постоянным напряжением на все время работы автоматического устройства. На обмотку управления подают сигнал (напряжение управления) лишь тогда, когда необходимо вызвать вращение якоря двигателя. От напряжения управления зависят вращающий момент и частота вращения двигателя. При изменении полярности напряжения управления меняется направление вращения якоря двигателя.
У исполнительных двигателей с полюсным управлением обмоткой управления является обмотка полюсов, а обмоткой возбуждения — обмотка якоря (рис. 30.10, б). Якорь двигателя постоянно подключен к сети с напряжением . Для ограничения тока иногда последовательно с якорем включают добавочное (балластное) сопротивление. На обмотку полюсов напряжение управления , (сигнал) подают лишь тогда, когда необходимо вызвать вращение якоря.
Рис. 30.10. Схема включения исполнительных двигателей постоянного тока
Исполнительные двигатели постоянного тока обычной конструкции имеют существенный недостаток — замедленность переходных процессов, т. е. отсутствие малоинерционности. Объясняется это в основном двумя причинами: наличием массивного якоря со стальным сердечником, обладающим значительным моментом инерции, и значительной индуктивностью обмотки якоря, уложенной в пазы сердечника якоря. Последняя причина способствует увеличению электромагнитной постоянной времени . Указанные недостатки отсутствуют в двигателях с гладким (полым) якорем (рис. 30.11). Станина 1 и полюсы 3 этого двигателя обычные. Возбуждение двигателя осуществляется либо с помощью обмотки возбуждения 2, либо постоянными магнитами.
Рис. 30.11. Малоинерционный исполнительный двигатель постоянного тока с полым якорем
Для уменьшения момента инерции якоря его обмотка отделена от массивного ферромагнитного сердечника, последний выполнен неподвижным (внутренний статор 5) и расположен на цилиндрическом выступе подшипникового щита 6.
Обмотка якоря в процессе изготовления укладывается на цилиндрический каркас, а затем заливается пластмассой. Готовый якорь 4 представляет собой полый стакан, состоящий из проводников обмотки, связанных воедино пластмассой. Концы секций обмотки, как и в обычном двигателе, соединяются с пластинами коллектора, который является частью дна полого стакана якоря 4. Вращающийся узел двигателя с гладким якорем состоит из вала, коллектора и обмотки якоря, залитой пластмассой.
Момент инерции полого якоря значительно меньше момента инерции обычного якоря, что обеспечивает хорошее быстродействие двигателя. Кроме того, индуктивность обмотки якоря снижается, что также способствует повышению быстродействия двигателя. К тому же снижение индуктивности обмотки улучшает коммутацию двигателя за счет уменьшения реактивной ЭДС (см § 27.4).
Недостаток рассмотренного малоинерционного двигателя с полым якорем — наличие большого немагнитного промежутка между полюсами статора и неподвижным ферромагнитным сердечником — внутренним статором. Этот промежуток складывается из двух воздушных зазоров и толщины стакана якоря (толщины слоя обмотки якоря). Наличие большого немагнитного промежутка на пути магнитного потока требует значительного увеличения МДС возбуждения, что приводит, во-первых, к увеличению габаритов двигателя из-за увеличения объема обмотки возбуждения, а во-вторых, к росту потерь на нагрев обмотки возбуждения. Однако КПД двигателя с полым якорем вследствие отсутствия потерь в стали сердечника якоря практически находится на том же уровне, что и в обычных двигателях, а в случае применения для возбуждения постоянных моментов значительно превосходит КПД последних.
Контрольные вопросы
1. Каково назначение компенсационной обмотки в ЭМУ?
2. Почему выходная характеристика тахогенератора криволинейна?
3. Будет ли работать БДПТ, если изменить полярность напряжения на его входе (см. рис. 30.6)?
4. Объясните принцип якорного и полюсного способов управления исполнительными двигателями?
5. Каковы достоинства и недостатки малоинерционного двигателя постоянного тока?
Для привода механизмов кранов и других подъемно-транспортных машин применяются электродвигатели постоянного и трехфазного переменного тока. По своим электромеханическим свойствам электродвигатели постоянного тока наилучшим образом соответствуют условиям работы подъемно-транспортных машин. Но для их питания требуются преобразовательные агрегаты или специальная сеть постоянного тока. Поэтому электродвигатели постоянного тока используют, как правило, для кранов, работающих в особо тяжелых условиях, при частых и значительных перегрузках, а также в тех случаях, когда требуется широкое и плавное регулирование скорости и точная остановка (монтажные краны, быстроходные лифты и т.п.). Электродвигатели постоянного тока различаются по способу возбуждения и по схеме включения обмоток (рис. 4).
Электродвигатель с независимым возбуждением (рис. 4, а) имеет обмотку возбуждения, питаемую от постороннего источника постоянного тока (специального возбудителя, посторонней сети и т. д.). В таком электродвигателе величина тока возбуждения не зависит от его скорости и нагрузки. Электродвигатели с независимым возбуждением для привода подъемно-транспортных машин применяются редко, так как при достаточно мощном источнике питания нет особого различия между работой электродвигателей с параллельным или независимым возбуждением. Поэтому более целесообразно .использовать электродвигатели с параллельным возбуждением, которые не требуют отдельного источника для питания обмотки возбуждения. Электродвигатель с параллельным возбуждением или шунговой электродвигатель (рис. 4, б) имеет обмотку возбуждения, которая подключается к зажимам якоря. Если машина работает в генераторном режиме, то такое подключение обмотки возбуждения приводит к сильной зависимости тока возбуждения от нагрузки. Однако в двигательном режиме этого почти не наблюдается, так как к якорю двигателя подается напряжение, не зависящее от нагрузки. Электродвигатели с параллельным возбуждением могут использоваться для привода лифтов, механизмов подъема, поворота и передвижения кранов. Электродвигатель с последовательным возбуждением (сериесный электродвигатель) снабжается обмоткой возбуждения (рис. 4, в), соединенной последовательно с обмоткой якоря. Поэтому магнитный поток возбуждения очень сильно зависит от нагрузки электродвигателя. Как правило, такие электродвигатели используются для привода механизмов подъема кранов. Электродвигатель со смешанным возбуждением (компаундный электродвигатель) имеет две обмотки возбуждения: последовательную и параллельную (рис. 4, г). Магнитный поток возбуждения в данном случае в меньшей степени зависит от нагрузки электродвигателя, чем у электродвигателей с последовательным возбуждением. В зависимости от того, какая из двух обмоток создает больший магнитный поток, характеристики электродвигателя со смешанным возбуждением приближаются к характеристикам электродвигателей с параллельным или последовательным возбуждением. Чаще всего такие электродвигатели попользуются для привода механизмов передвижения тележек и мостов кранов. По конструктивному исполнению электродвигатели постоянного тока различного возбуждения ничем практически не отличаются друг от друга. Основными частями кранового электродвигателя постоянного тока (рис. 5) являются станина с полюсами 1 и якорь 3 с коллектором 4. Станина выполняется из стали или чугуна. На ней располагаются главные полюсы 1 с обмотками возбуждения 2. Полюсы набираются из тонких листов специальной электротехнической стали толщиной 0,5— 1 мм. Якорь является вращающейся частью электродвигателя. Он также набирается из штампованных тонких листов стали. В сердечнике якоря имеются пазы, куда закладывается обмотка, которая соединяется с коллектором и через угольные щетки 5 присоединяется к источнику питания через соответствующую пускорегулирующую аппаратуру. Щетки укрепляются в специальных щеткодержателях и при работе машины скользят по гладкой поверхности коллектора. Последний набирается из пластин холоднокатаной электролитической меди, разделенных изоляционными прокладками из миканита (слюда; проклеенная лаком). Часто электродвигатели постоянного тока снабжаются дополнительными полюсами, служащими для уменьшения искрения на коллекторе. Дополнительные полюсы, так же как и главные, крепятся к станине. На них располагается обмотка, включаемая в цепь якоря последовательно. Крупные электродвигатели постоянного тока снабжаются компенсационной обмоткой, которая закладывается в пазы полюсных башмаков (выступающая часть полюсов). Компенсационная обмотка служит для устранения реакции якоря, вызываемой влиянием магнитного потока якоря на основной поток главных полюсов, в результате чего усиливается искрение на коллекторе. Наибольшее применение для привода механизмов подъемно-транспортных машин получили асинхронные электродвигатели трехфазного тока (рис. 6). Основными частями электродвигателя (рис. 6, а) являются вращающий ротор 2 и неподвижный статор 1, которые набираются из тонких листов электротехнической стали толщиной 0,5 мм. В специально предусмотренных пазах размещаются обмотки 3 статора и 4 ротора. Обмотка статора всегда выполняется трехфазной и может включаться звездой и треугольником (рис. 6, б). Выводы от нее присоединяются к зажимам электродвигателя, к которым с помощью соответствующей пускорегулирующей аппаратуры подается питание от сети. Различают асинхронные электродвигатели с фазным и короткозамкнутым ротором, на валах которых укрепляется крылатка 7 для охлаждения. У первых обмотка ротора выполняется трехфазной и через кольца 5 и щетки 6 присоединяется к пусковым сопротивлениям. В электродвигателях с короткозамкнутым ротором обмотка ротора состоит из медных, латунных или алюминиевых стержней, помещенных в пазах ротора и замкнутых между собой с его торцов кольцами. Эти стержни могут составлять или одинарную, или двойную «беличью» клетку. В первом случае электродвигатель имеет недостаточно удовлетворительную пусковую характеристику. Более приемлемыми являются двухклеточные асинхронные электродвигатели. У них стержни верхней клетки ротора выполняются из материала с большим удельным сопротивлением (латунь, алюминиевая бронза и т. д.), стержни нижней клетки делаются с малым удельным сопротивлением (красная медь). В момент пуска такого электродвигателя (при подаче трехфазного тока в обмотку статора) ток протекает по стержням верхней клетки, имеющей сравнительно небольшое индуктивное сопротивление в момент пуска и значительное активное сопротивление. Это равноценно введению пускового реостата в роторную цепь и приводит к уменьшению пускового тока и увеличению пускового момента. После разгона электродвигателя, когда частота тока в обмотке ротора упадет, ток протекает по стержням нижней клетки, имеющей небольшое активное сопротивление. Аналогично работают электродвигатели с глубоким пазом, обладающие повышенными пусковыми моментами по сравнению с обычными электродвигателями. Так, у электродвигателей с нормальным короткозамкнутым ротором отношение пускового момента к номинальному составляет 0,8—1,3 при значительном пусковом токе (5?7 Iн), электродвигатели же с двойной клеткой или глубоким пазом могут развивать двукратный пусковой момент при меньшем пусковом токе. Это позволяет широко применять их для привода электроталей, кранбалок, лифтов и машин непрерывного транспорта. Обычные же асинхронные электродвигатели с короткозамкнутым ротором из-за трудностей с регулированием скорости применяются в подъемно-транспортных машинах очень редко. Механизмы кранов и других портовых подъемно-транспортных машин приводятся асинхронными электродвигателями с фазным ротором. |
Выбор электрических двигателей, конструктивное исполнение электродвигателей
ВЫБОР ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ
КОНСТРУКТИВНОЕ ИСПОЛНЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕЙ
Электродвигатели постоянного и переменного тока широко применяют в приводах монтажных кранов, быстроходных лифтов, механизмов подъема, поворота и передвижения, в приводах электроталей, кран-балок, машин непрерывного транспорта и других. Для таких механизмов, как монорельсовые тележки, электротали и машины непрерывного действия, используют электродвигатели единой серии А или АЛ, которые выполняются иногда с соблюдением специальных требований. Кроме того, применяют двигатели с повышенным скольжением серий АС и АОС, с повышенным моментом серий АП и АОП, с, контактными кольцами серий АК и АОК и др. Для кранов и лебедок применяют крановые (металлургические) электродвигатели.
Условия применения электродвигателей определяют особенности их конструкции по системе защиты от внешней среды. Электродвигатели выполняются закрытыми с естественной вентиляцией, у которых нет специальных устройств для охлаждения, с самовентиляцией, у которых охлаждение осуществляется вентилятором, укрепленным на валу ротора, и с посторонним охлаждением от специальных независимых от двигателя устройств.
Для работы на открытом воздухе устанавливают закрытые негерметизированные двигатели, для пыльных и влажных помещений — закрытые вентилируемые, для особо сырых и насыщенных парами и газами помещений — водозащищенные и герметические двигатели. ГОСТ 184—61 предусматривает режимы работы электродвигателей закрытого исполнения при повторно-кратковременном режиме с относительной продолжительностью включения ПВ 15, 25, 40 и 60% и кратковременном режиме продолжительностью 60 мин. Электродвигатели с независимой вентиляцией допускают работу при продолжительном режиме. Крановые двигатели постоянного тока отличаются повышенной механической прочностью. Якори двигателей мощностью до 80 кет выполняются с волновой (последовательной) обмоткой, а более мощные машины изготовляются либо с последовательно-параллельной, либо с петлевой (параллельной) обмоткой. Крановые двигатели постоянного и переменного тока не выполняются водозащищенными, и поэтому
при установке на открытом воздухе их рекомендуется защищать от попадания атмосферных осадков.