


Типы электродвигателей
Типы электродвигателей
Электрический двигатель – так называют электрическую машину (электромеханический преобразователь энергии), в которой энергия электричества преобразуется в механическую. При этом выделяется тепло.
Принцип действия
Рабочая схема электродвигателя очень проста. В основе функционирования электрической машины существует принцип электромагнитной индукции. Электрический механизм состоит из статора (неподвижного), который устанавливается в синхронных или асинхронных машинах переменного тока или индуктора (электродвигатели постоянного тока) и ротора (подвижной части, устанавливаемого в синхронных или асинхронных машинах переменного тока) или якоря (в машине тока постоянного). В качестве индуктора на маломощном двигателе постоянного тока используются магниты.
Роторы бывают:
— Короткозамкнутые
— Фазные (имеющие обмотку).
В основном, представлены крановым электродвигателем серии МТКН (который по большей части применяется в крановых установках).
Якорем называют подвижную часть машины постоянного тока (генератора или двигателя) или же функционирующего по данному принципу универсального двигателя (который часто встречается в электрических инструментах). Универсальным двигателем называют ДПТ (двигатель постоянного тока), который имеет последовательное возбуждение (когда обмотки индуктора и якоря
Принцип функционирования асинхронного трехфазного электродвигателя
При включении питания в статоре возникает вращающееся круговое магнитное поле. Оно пронизывает короткозамкнутую обмотку ротора и появляется ток индукции. Согласно закону Ампера (на проводник, находящийся под током, помещенный при этом в магнитное поле, действует ЭДС сила), ротор начинает вращаться.
Оно пронизывает короткозамкнутую обмотку ротора и появляется ток индукции. Согласно закону Ампера (на проводник, находящийся под током, помещенный при этом в магнитное поле, действует ЭДС сила), ротор начинает вращаться.
Частота его вращения зависит от частоты напряжения, а также от числа пар полюсов магнитов. Разность между частотой вращения ротора и частотой вращения поля магнитного статора характеризуется скольжением. Электродвигатель асинхронный называется асинхронным, потому что частота вращения поля магнитного статора не совпадает с частотой ротора.
Синхронный двигатель отличается от него конструкцией ротора. Ротор в подобном двигателе выполнен либо электромагнитом, либо постоянным магнитом. Также может иметь в себе частичку беличьей клетки (для запуска). В роторе непременно содержатся электромагниты или постоянные магниты. Частота вращения поля магнитного статора в синхронном двигателе совпадает с частотой ротора. Для запуска в данной конструкции применяют ротор с обмоткой короткозамкнутой или асинхронные вспомогательные электродвигатели.
Асинхронные двигатели широко применяются во многих отраслях техники. Это особенно характерно для обычных по конструкции и трехфазных прочных асинхронных двигателей, которые имеют коротко-замкнутые роторы. Такие двигатели дешевле и надежнее обычных электрических двигателей и не нуждаются в особом уходе. Название «асинхронный» указывает на то, что в подобном двигателе ротор вращается с вращающимся полем статора не синхронно. В отсутствие трехфазной сети асинхронный двигатель включают в сеть однофазного тока.
Устройство статора асинхронного электродвигателя очень простое. Он состоит из пакета лакированных листов стали электротехнической толщиной 0,5 мм. В пазах пакета, такого же, как в синхронной машине, уложена обмотка. Статор трехфазного асинхронного двигателя имеет три фазы обмотки. Обмотка смещена на 120°. Между собой фазы соединены треугольником или звездой.
Схема двухполюсной машины
Схема двухполюсной машины выглядит очень просто.
Ротор асинхронного электродвигателя состоит из листов электротехнической стали. Он может выполняться в виде ротора с контактными кольцами (фазный ротор) или короткозамкнутого ротора (с беличьей клеткой). В короткозамкнутом роторе обмотка выглядит в виде стержней из металла (бронзы, меди или алюминия). Стержни располагаются в пазах и соединяются между собой на концах особыми закорачивающими кольцами.
Прямо у ротора электрического двигателя с контактными кольцами в пазах располагается трехфазная обмотка. По внешнему виду она походит на обмотку статора, включенную звездой. Начала фаз данной обмотки соединены с тремя контактными кольцами, которые закреплены на валу. В процессе запуска двигателя можно выполнить регулировку частоты вращения. Для этого подсоединяют к фазам обмотки ротора реостаты (делается это через щетки и контактные кольца). После успешного разбега кольца контактов замыкаются накоротко. Это значит, что обмотка двигателя ротора выполняет те же самые функции, что и обмотка короткозамкнутого ротора.
Классификация электрических двигателей
По природе возникновения вращающего момента электрические двигатели делятся на магнитоэлектрические и гистерезисные.
Самым распространенным товаром считаются магнитоэлектрические двигатели. По типу потребляемой энергии они подразделяются на две группы – двигатели тока постоянного и двигатели тока переменного. Также существуют так называемые двигатели универсальные, которые питаются обоими видами токов.
Двигателем постоянного тока называют электродвигатель, чье питание происходит за счет постоянного тока. Данный тип двигателей также принято подразделять по наличию щёточно-коллекторного узла на две группы:
— бесколлекторные
— коллекторные
Щёточно-коллекторный узел отвечает за качественное электрическое соединение цепей неподвижной и вращающейся части машины. Он является самым сложнейшим в обслуживании и ненадежным конструктивным элементом.
Он является самым сложнейшим в обслуживании и ненадежным конструктивным элементом.
Коллекторные двигатели по типу возбуждения подразделяются на:
— двигатель с самовозбуждением
— двигатель с независимым возбуждением (от постоянных магнитов и электрических магнитов).
Двигатель с самовозбуждением подразделяется на:
— двигатель, имеющий параллельное возбуждение (обмотка якоря в этом случае включается строго параллельно обмотке возбуждения)
— двигатель, имеющий последовательное возбуждение (обмотка якоря в данном случае якоря включается строго последовательно обмотке возбуждения)
— двигатель, имеющий смешанное возбуждение (обмотка возбуждения в данном случае включается последовательно частично и параллельно частично обмотке якоря).
Вентильные двигатели (бесколлекторные) – это электрические двигатели, которые выполняются в виде замкнутой системы с применением датчика, определяющего положение ротора, преобразователя координат (системы управления), а также инвертора (силового полупроводникового преобразователя). Принцип функционирования подобных двигателей схож с принципом работы системы синхронных двигателей.
Принцип функционирования подобных двигателей схож с принципом работы системы синхронных двигателей.
Двигатель переменного тока
Трехфазный асинхронный двигатель
Электродвигатели переменного тока — это электрические двигатели, питание которых осуществляется при помощи переменного тока. По принципу функционирования подобные двигатели подразделяются на асинхронные и синхронные двигатели. Принципиальное отличие заключается в том, что в синхронном двигателе первая гармоника силы магнитодвижущей статора перемещается со скоростью вращения ротора. Сам ротор перемещается со скоростью перемещения магнитного поля в статоре. У асихронного двигателя всегда присутствует разница между скоростью перемещения ротора и скоростью магнитных полей в статоре (ротор вращается медленнее поля).
Синхронный электродвигатель — это электрический двигатель тока переменного. Ротор синхронно вращается с полем магнитным питающего напряжения. Подобные устройства применяются для обеспечения больших мощностей (более сотни киловатт). Синхронные двигатели бывают с угловым дискретным перемещением ротора (так называемые шаговые двигатели). У подобных устройств положение ротора прочно фиксируется подачей питания на обмотки. Переход в иное положение осуществляется при помощи снятия напряжения питания с первых обмоток и передачи на вторые (и так далее). Помимо этого существует и еще один вид синхронного двигателя — реактивный вентильный двигатель электрический. Питание обмоток данного двигателя формируется за счет элементов полупроводниковых.
Подобные устройства применяются для обеспечения больших мощностей (более сотни киловатт). Синхронные двигатели бывают с угловым дискретным перемещением ротора (так называемые шаговые двигатели). У подобных устройств положение ротора прочно фиксируется подачей питания на обмотки. Переход в иное положение осуществляется при помощи снятия напряжения питания с первых обмоток и передачи на вторые (и так далее). Помимо этого существует и еще один вид синхронного двигателя — реактивный вентильный двигатель электрический. Питание обмоток данного двигателя формируется за счет элементов полупроводниковых.
Асинхронный электродвигатель — это электрический двигатель переменного тока. Частота вращения ротора в данном двигателе существенно отличается от вращения полей магнита, которые создаются от питающего напряжения. Подобные устройства наиболее распространены.
По количеству фаз двигатель тока переменного принято подразделять на:
— Однофазные электродвигатели. Запуск подобных устройств производится вручную. Они могут иметь пусковую обмотку или фазосдвигающую цепь.
Запуск подобных устройств производится вручную. Они могут иметь пусковую обмотку или фазосдвигающую цепь.
— Двухфазный (сюда входят и конденсаторные)
— Электродвигатель трехфазный
— Многофазный
Коллекторный универсальный электродвигатель
Коллекторный универсальный электродвигатель – это электрический коллекторный двигатель, который может функционировать как на переменном, так и на постоянном токе. Производится с последовательной обмоткой возбуждения строго на мощности электродвигателя около 200 Вт. Статор двигателя выполнен шихтованным из особой электрической технической стали. Обмотка возбуждения полностью включается при постоянном токе и частично включается при переменном токе. Номинальные напряжения для переменного тока — 127,220, для тока постоянного номинальные напряжения- 110.220. Двигатели такого плана используются в электроинструментах и бытовых аппаратах.
Двигатель переменного тока, питающийся от промышленной сети 50 ГЦ, не может обеспечить частоту вращения более 3000 об/мин. Именно поэтому для получения высочайших частот следует использовать коллекторный электродвигатель. Такой двигатель получается меньше и легче, в сравнении с двигателем тока переменного такой же мощности. Также применяются особые передаточные механизмы, которые позволяют изменять кинематические параметры механизмов до нужных вам (так называемые мультипликаторы). При использовании преобразователей частоты или сети частоты повышенной (в 100, 200 или 400 Гц) двигатель переменного тока оказывается меньше и легче, в сравнении с коллекторным двигателем (поскольку иногда коллекторный узел занимает ½ объема). Ресурс асинхронного двигателя переменного тока выше в сравнении с коллекторным. Он определяется состоянием изоляции обмоток и подшипников.
Синхронный двигатель, имеющий датчик положения ротора и инвертор, считается электронным аналогом обычного коллекторного постоянного тока. Коллекторный универсальный двигатель считается электродвигателем коллекторным постоянного тока, имеющим последовательно включенные обмотки статора (возбуждения). Подключение электродвигателя такого типа не вызывает сложностей. Он также оптимизирован для функционирования на переменном токе электрической бытовой сети. Подобный тип двигателя вне зависимости от полярности поданного напряжения вращается строго в одну сторону. Это происходит потому, что обмотки ротора и статора соединены последовательно и смена полюсов полей магнитных данных устройств происходит одновременно, а значит, результирующий момент направлен в одну сторону. Если необходима работа на переменном токе, применяют статор из мягкого магнитного материала, имеющий малый гистерезис (малое сопротивление перемагничиванию).
Коллекторный универсальный двигатель считается электродвигателем коллекторным постоянного тока, имеющим последовательно включенные обмотки статора (возбуждения). Подключение электродвигателя такого типа не вызывает сложностей. Он также оптимизирован для функционирования на переменном токе электрической бытовой сети. Подобный тип двигателя вне зависимости от полярности поданного напряжения вращается строго в одну сторону. Это происходит потому, что обмотки ротора и статора соединены последовательно и смена полюсов полей магнитных данных устройств происходит одновременно, а значит, результирующий момент направлен в одну сторону. Если необходима работа на переменном токе, применяют статор из мягкого магнитного материала, имеющий малый гистерезис (малое сопротивление перемагничиванию).
Если необходимо уменьшение потерь на вихревые токи, берут наборный статор, изготовленный из изолированных пластин. Достоинством функционирования подобного двигателя считается то, что в режиме пуска и перегрузки индуктивное сопротивление обмоток ограничивает ток и максимальный момент двигателя до 5 – 3 от номинального.
Электрический синхронный двигатель возвратно-поступательного движения
Принцип его функционирования прост. Подвижная часть выполняется в виде магнитов, которые крепятся на штоке. Переменный ток электродвигателя проходит через неподвижные обмотки. Под действием этого процесса постоянные магниты перемещают шток.
Лось Анастасия
Специально для Двигатель.инфо
45908 просмотров
Синхронные электродвигатели постоянного тока. Электродвигатели: какие они бывают
Электрический двигатель – так называют электрическую машину (электромеханический преобразователь энергии), в которой энергия электричества преобразуется в механическую. При этом выделяется тепло.
Принцип действия
Рабочая схема электродвигателя очень проста. В основе функционирования электрической машины существует принцип электромагнитной индукции. Электрический механизм состоит из статора (неподвижного), который устанавливается в синхронных или асинхронных машинах переменного тока или индуктора (электродвигатели постоянного тока) и ротора (подвижной части, устанавливаемого в синхронных или асинхронных машинах переменного тока) или якоря (в машине тока постоянного). В качестве индуктора на маломощном двигателе постоянного тока используются магниты.
В качестве индуктора на маломощном двигателе постоянного тока используются магниты.
Роторы бывают:
Короткозамкнутые
Фазные (имеющие обмотку). Применяются в случае уменьшения пускового тока и для регуляции частоты вращения асинхронного электродвигателя.
В основном, представлены крановым электродвигателем серии МТКН (который по большей части применяется в крановых установках).
Якорем называют подвижную часть машины постоянного тока (генератора или двигателя) или же функционирующего по данному принципу универсального двигателя (который часто встречается в электрических инструментах). Универсальным двигателем называют ДПТ (двигатель постоянного тока), который имеет последовательное возбуждение (когда обмотки индуктора и якоря
включены последовательно). Различие только в расчете обмоток. На постоянном токе нет реактивного (емкостного или индуктивного) сопротивления. Именно поэтому любая болгарка, если вынуть электронный блок, будет в рабочем состоянии, особенно на постоянном токе и при меньшем сетевом напряжении.
Принцип функционирования асинхронного трехфазного электродвигателя
При включении питания в статоре возникает вращающееся круговое магнитное поле. Оно пронизывает короткозамкнутую обмотку ротора и появляется ток индукции. Согласно закону Ампера (на проводник, находящийся под током, помещенный при этом в магнитное поле, действует ЭДС сила), ротор начинает вращаться.
Частота его вращения зависит от частоты напряжения, а также от числа пар полюсов магнитов. Разность между частотой вращения ротора и частотой вращения поля магнитного статора характеризуется скольжением. Электродвигатель асинхронный называется асинхронным, потому что частота вращения поля магнитного статора не совпадает с частотой ротора.
Синхронный двигатель отличается от него конструкцией ротора. Ротор в подобном двигателе выполнен либо электромагнитом, либо постоянным магнитом. Также может иметь в себе частичку беличьей клетки (для запуска). В роторе непременно содержатся электромагниты или постоянные магниты. Частота вращения поля магнитного статора в синхронном двигателе совпадает с частотой ротора. Для запуска в данной конструкции применяют ротор с обмоткой короткозамкнутой или асинхронные вспомогательные электродвигатели.
Частота вращения поля магнитного статора в синхронном двигателе совпадает с частотой ротора. Для запуска в данной конструкции применяют ротор с обмоткой короткозамкнутой или асинхронные вспомогательные электродвигатели.
Асинхронные двигатели широко применяются во многих отраслях техники. Это особенно характерно для обычных по конструкции и трехфазных прочных асинхронных двигателей, которые имеют коротко-замкнутые роторы. Такие двигатели дешевле и надежнее обычных электрических двигателей и не нуждаются в особом уходе. Название «асинхронный» указывает на то, что в подобном двигателе ротор вращается с вращающимся полем статора не синхронно. В отсутствие трехфазной сети асинхронный двигатель включают в сеть однофазного тока.
Устройство статора асинхронного электродвигателя очень простое. Он состоит из пакета лакированных листов стали электротехнической толщиной 0,5 мм. В пазах пакета, такого же, как в синхронной машине, уложена обмотка. Статор трехфазного асинхронного двигателя имеет три фазы обмотки. Обмотка смещена на 120°. Между собой фазы соединены треугольником или звездой.
Обмотка смещена на 120°. Между собой фазы соединены треугольником или звездой.
Схема двухполюсной машины
Схема двухполюсной машины выглядит очень просто. В машине содержатся четыре паза из расчета на каждую фазу. При поступлении питания на обмотки статора от трехфазной сети получается особое вращающееся поле. Это получается потому, что токи в фазах обмотки смещены в пространстве на 120° относительно друг друга и сдвинуты по фазе на 120°. При синхронной частоте вращения nc поля электродвигателя с р парами полюсов верно при частоте токов в f: nc=f/p. Так, при частоте 50 Гц получается для р = 1, 2, 3 (двух-, четырех или шести машин полюсных) получаются синхронные частоты вращения в nc = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя состоит из листов электротехнической стали. Он может выполняться в виде ротора с контактными кольцами (фазный ротор) или короткозамкнутого ротора (с беличьей клеткой). В короткозамкнутом роторе обмотка выглядит в виде стержней из металла (бронзы, меди или алюминия).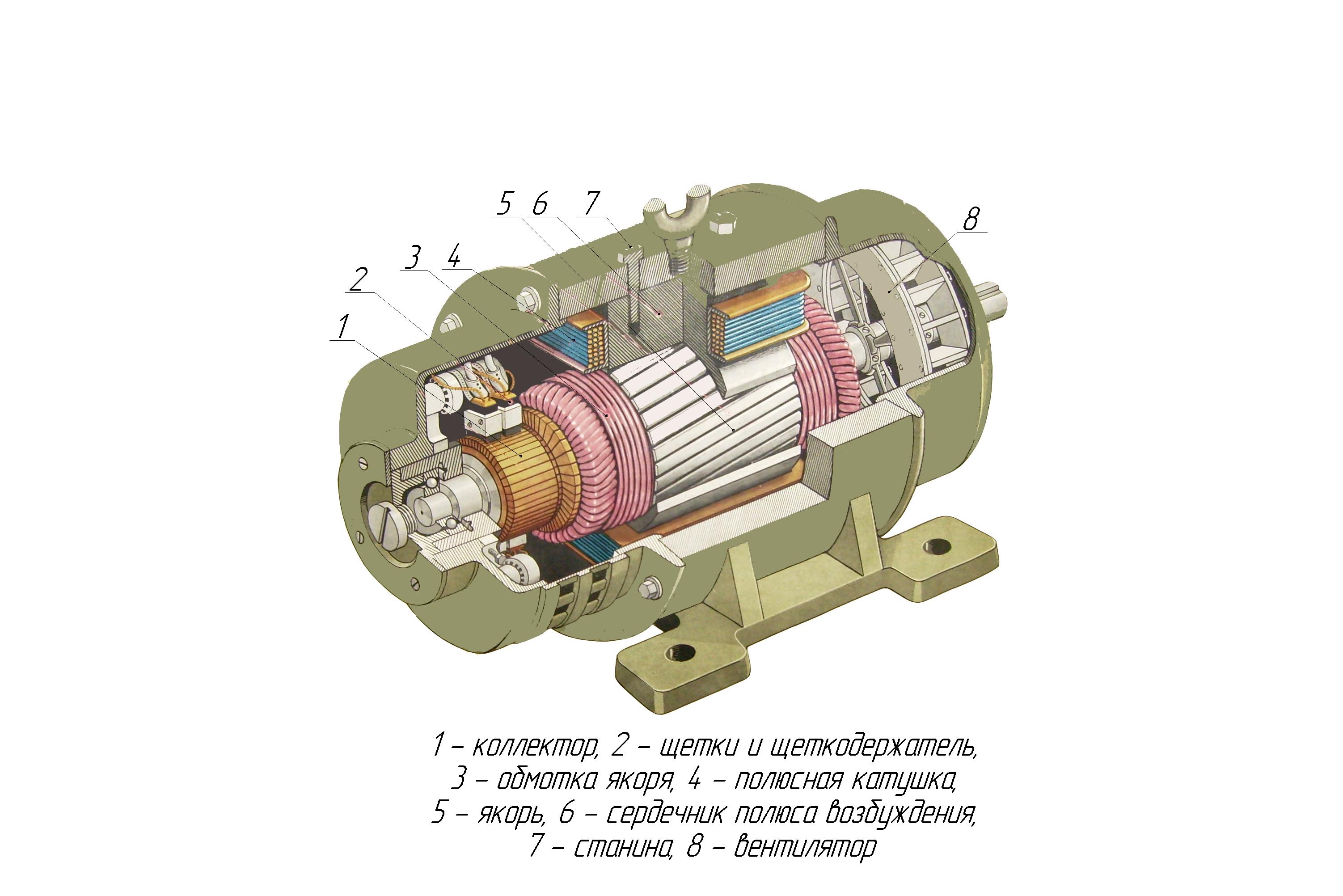 Стержни располагаются в пазах и соединяются между собой на концах особыми закорачивающими кольцами. Соединение стержней осуществляет при помощи пайки сваркой или твердым припоем. При использовании сплавов из алюминия или алюминия стержни ротора, а также закорачивающие кольца и лопасти вентилятора, располагающиеся на них, производят при помощи литья под давлением.
Стержни располагаются в пазах и соединяются между собой на концах особыми закорачивающими кольцами. Соединение стержней осуществляет при помощи пайки сваркой или твердым припоем. При использовании сплавов из алюминия или алюминия стержни ротора, а также закорачивающие кольца и лопасти вентилятора, располагающиеся на них, производят при помощи литья под давлением.
Прямо у ротора электрического двигателя с контактными кольцами в пазах располагается трехфазная обмотка. По внешнему виду она походит на обмотку статора, включенную звездой. Начала фаз данной обмотки соединены с тремя контактными кольцами, которые закреплены на валу. В процессе запуска двигателя можно выполнить регулировку частоты вращения. Для этого подсоединяют к фазам обмотки ротора реостаты (делается это через щетки и контактные кольца). После успешного разбега кольца контактов замыкаются накоротко. Это значит, что обмотка двигателя ротора выполняет те же самые функции, что и обмотка короткозамкнутого ротора.
Классификация электрических двигателей
По природе возникновения вращающего момента электрические двигатели делятся на магнитоэлектрические и гистерезисные. У гистерезисных двигателей вращающийся момент создается за счет гистерезиса при перемагничивании ротора. Подобные устройства считаются нетрадиционными и мало распространены в промышленности.
Самым распространенным товаром считаются магнитоэлектрические двигатели. По типу потребляемой энергии они подразделяются на две группы – двигатели тока постоянного и двигатели тока переменного. Также существуют так называемые двигатели универсальные, которые питаются обоими видами токов.
Двигатель постоянного тока
Двигателем постоянного тока называют электродвигатель, чье питание происходит за счет постоянного тока. Данный тип двигателей также принято подразделять по наличию щёточно-коллекторного узла на две группы:
Бесколлекторные
Коллекторные
Щёточно-коллекторный узел отвечает за качественное электрическое соединение цепей неподвижной и вращающейся части машины. Он является самым сложнейшим в обслуживании и ненадежным конструктивным элементом.
Он является самым сложнейшим в обслуживании и ненадежным конструктивным элементом.
Коллекторные двигатели по типу возбуждения подразделяются на:
Двигатель с самовозбуждением
Двигатель с независимым возбуждением (от постоянных магнитов и электрических магнитов).
Двигатель с самовозбуждением подразделяется на:
Двигатель, имеющий параллельное возбуждение (обмотка якоря в этом случае включается строго параллельно обмотке возбуждения)
Двигатель, имеющий последовательное возбуждение (обмотка якоря в данном случае якоря включается строго последовательно обмотке возбуждения)
Двигатель, имеющий смешанное возбуждение (обмотка возбуждения в данном случае включается последовательно частично и параллельно частично обмотке якоря).
Вентильные двигатели (бесколлекторные) – это электрические двигатели, которые выполняются в виде замкнутой системы с применением датчика, определяющего положение ротора, преобразователя координат (системы управления), а также инвертора (силового полупроводникового преобразователя). Принцип функционирования подобных двигателей схож с принципом работы системы синхронных двигателей.
Принцип функционирования подобных двигателей схож с принципом работы системы синхронных двигателей.
Двигатель переменного тока
Трехфазный асинхронный двигатель
Электродвигатели переменного тока — это электрические двигатели, питание которых осуществляется при помощи переменного тока. По принципу функционирования подобные двигатели подразделяются на асинхронные и синхронные двигатели. Принципиальное отличие заключается в том, что в синхронном двигателе первая гармоника силы магнитодвижущей статора перемещается со скоростью вращения ротора. Сам ротор перемещается со скоростью перемещения магнитного поля в статоре. У асихронного двигателя всегда присутствует разница между скоростью перемещения ротора и скоростью магнитных полей в статоре (ротор вращается медленнее поля).
Синхронный электродвигатель — это электрический двигатель тока переменного. Ротор синхронно вращается с полем магнитным питающего напряжения. Подобные устройства применяются для обеспечения больших мощностей (более сотни киловатт). Синхронные двигатели бывают с угловым дискретным перемещением ротора (так называемые шаговые двигатели). У подобных устройств положение ротора прочно фиксируется подачей питания на обмотки. Переход в иное положение осуществляется при помощи снятия напряжения питания с первых обмоток и передачи на вторые (и так далее). Помимо этого существует и еще один вид синхронного двигателя — реактивный вентильный двигатель электрический. Питание обмоток данного двигателя формируется за счет элементов полупроводниковых.
Синхронные двигатели бывают с угловым дискретным перемещением ротора (так называемые шаговые двигатели). У подобных устройств положение ротора прочно фиксируется подачей питания на обмотки. Переход в иное положение осуществляется при помощи снятия напряжения питания с первых обмоток и передачи на вторые (и так далее). Помимо этого существует и еще один вид синхронного двигателя — реактивный вентильный двигатель электрический. Питание обмоток данного двигателя формируется за счет элементов полупроводниковых.
Асинхронный электродвигатель — это электрический двигатель переменного тока. Частота вращения ротора в данном двигателе существенно отличается от вращения полей магнита, которые создаются от питающего напряжения. Подобные устройства наиболее распространены.
По количеству фаз двигатель тока переменного принято подразделять на:
Однофазные электродвигатели. Запуск подобных устройств производится вручную. Они могут иметь пусковую обмотку или фазосдвигающую цепь.
Двухфазный (сюда входят и конденсаторные)
Электродвигатель трехфазный
Многофазный
Коллекторный универсальный электродвигатель – это электрический коллекторный двигатель, который может функционировать как на переменном, так и на постоянном токе. Производится с последовательной обмоткой возбуждения строго на мощности электродвигателя около 200 Вт. Статор двигателя выполнен шихтованным из особой электрической технической стали. Обмотка возбуждения полностью включается при постоянном токе и частично включается при переменном токе. Номинальные напряжения для переменного тока — 127,220, для тока постоянного номинальные напряжения- 110.220. Двигатели такого плана используются в электроинструментах и бытовых аппаратах.
Производится с последовательной обмоткой возбуждения строго на мощности электродвигателя около 200 Вт. Статор двигателя выполнен шихтованным из особой электрической технической стали. Обмотка возбуждения полностью включается при постоянном токе и частично включается при переменном токе. Номинальные напряжения для переменного тока — 127,220, для тока постоянного номинальные напряжения- 110.220. Двигатели такого плана используются в электроинструментах и бытовых аппаратах.
Двигатель переменного тока, питающийся от промышленной сети 50 ГЦ, не может обеспечить частоту вращения более 3000 об/мин. Именно поэтому для получения высочайших частот следует использовать коллекторный электродвигатель. Такой двигатель получается меньше и легче, в сравнении с двигателем тока переменного такой же мощности. Также применяются особые передаточные механизмы, которые позволяют изменять кинематические параметры механизмов до нужных вам (так называемые мультипликаторы). При использовании преобразователей частоты или сети частоты повышенной (в 100, 200 или 400 Гц) двигатель переменного тока оказывается меньше и легче, в сравнении с коллекторным двигателем (поскольку иногда коллекторный узел занимает ½ объема). Ресурс асинхронного двигателя переменного тока выше в сравнении с коллекторным. Он определяется состоянием изоляции обмоток и подшипников.
Ресурс асинхронного двигателя переменного тока выше в сравнении с коллекторным. Он определяется состоянием изоляции обмоток и подшипников.
Синхронный двигатель, имеющий датчик положения ротора и инвертор, считается электронным аналогом обычного коллекторного постоянного тока. Коллекторный универсальный двигатель считается электродвигателем коллекторным постоянного тока, имеющим последовательно включенные обмотки статора (возбуждения). Подключение электродвигателя такого типа не вызывает сложностей. Он также оптимизирован для функционирования на переменном токе электрической бытовой сети. Подобный тип двигателя вне зависимости от полярности поданного напряжения вращается строго в одну сторону. Это происходит потому, что обмотки ротора и статора соединены последовательно и смена полюсов полей магнитных данных устройств происходит одновременно, а значит, результирующий момент направлен в одну сторону. Если необходима работа на переменном токе, применяют статор из мягкого магнитного материала, имеющий малый гистерезис (малое сопротивление перемагничиванию).
Если необходимо уменьшение потерь на вихревые токи, берут наборный статор, изготовленный из изолированных пластин. Достоинством функционирования подобного двигателя считается то, что в режиме пуска и перегрузки индуктивное сопротивление обмоток ограничивает ток и максимальный момент двигателя до 5 – 3 от номинального.
Принцип его функционирования прост. Подвижная часть выполняется в виде магнитов, которые крепятся на штоке. Переменный ток электродвигателя проходит через неподвижные обмотки. Под действием этого процесса постоянные магниты перемещают шток.
Лось Анастасия
Специально для Двигатель.инфо
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатели постоянного тока
Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
- коллекторные двигатели;
- бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.
По типу возбуждения коллекторные двигатели можно разделить на:
- двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- двигатели с самовозбуждением.
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением;(обмотка якоря включается параллельно обмотке возбуждения)
- Двигатели последовательного возбуждения;(обмотка якоря включается последовательно обмотке возбу ждения)
- Двигатели смешанного возбуждения.(обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатели переменного тока
Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь;
двухфазные — в том числе конденсаторные;
трёхфазные;
многофазные;
Универсальный коллекторный электродвигатель
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
И переменного , и постоянного тока до сих пор используются на производстве и в быту , они совершенствуются , разрабатываются новые модели . Отсюда следует вывод , что от постоянного тока отказались не полностью .
Изобретение двигателей переменного тока не следует списывать на одного человека , как это делается сейчас , многие уверенны , что все, что касается переменного тока , а заодно и сам ток, изобрел один лишь Никола Тесла . Но это не так: несколько крупных ученых разработали и изготовили свою модель двигателя . Например , одним из первых изобретателей был Чарльз Уитстон в 40-х годах XIX века , а в 1889 году русский ученый М.О. Доливо-Добровольский изобрел трехфазный двигатель , который по своим характеристикам превосходит изобретение Теслы . Фактически , двигатели по этому принципу изготавливаются до наших дней .
Основное отличие конструкции двигателей :
Переменного тока — обмотка на статоре , между ним и ротором воздушный зазор (его величина тоже несет в себе дополнительные свойства ).
Постоянного тока — обмотка на ротора (он называется якорь, он вращается).
По способу возбуждения они подразделяются на двигатели независимого параллельного, последовательного и смешанного возбуждения.
Сейчас моторы переменного тока нашли широчайшее применение в быту, промышленности, сельском хозяйстве, также они активно эксплуатируются на электростанциях. Они получили распространение, благодаря простой технологичной конструкции, высоким энергетическим показателям, надежности и стабильности работы.
Двигатели переменного тока бывают однофазные и трехфазные.
Первый — однофазный — не имеет начального пускового момента и поэтому часто используется бытовых приборах, он вращается в ту сторону, в которую направляет внешняя сила. Кроме того, его мощность несколько меньше чем у трехфазных.
Обмотка его статора расположена в пазах и занимает примерно 2/3. Если этому типу все-таки требуется пусковой момент, то двигатель снабжают дополнительной обмоткой (из провода меньшего сечения), сдвинутой на 90 градусов относительно рабочей.
Трехфазные асинхронные двигатели подразделяются на два основных типа: с короткозамкнутым ротором и с фазным ротором (их еще называют «с контактными кольцами»). Статор у них одинаковый.
Асинхронные с короткозамкнутым ротором являются наиболее распространенными. На статоре — трехфазная обмотка, обмотка ротора — короткозамкнутая в виде «беличьей клетки», они размещаются в пазах, расположенных на внешней поверхности — у статора, и на внутренней — у ротора, простейший элемент обмотки — виток, состоящий из двух или нескольких параллельных проводников, которые размещены в пазах и расположены друг от друга на некотором расстоянии. Это расстояние называют шагом обмотки, который приблизительно равен одному полюсному делению.
Вращающееся поле статора и пересекает проводящие обмотки ротора, создает напряжение, чем и вызывает появление тока в обмотках и вращение ротора. На силу тока влияет подключенное сопротивление, причем зависимость обратно пропорциональная, то есть, чем выше сопротивление, тем, соответственно, сила тока ниже и наоборот. В свою очередь, вращающий момент наоборот прямо пропорционален и увеличивается с ростом сопротивления.
В случае с фазным ротором его разомкнутая обмотка выводится на контактные кольца для соединения с внешней схемой. Его используют для регулярно работающих электроприводов, не изменяющих скорость (или — в небольших пределах).
Двигатели постоянного тока сейчас используются только в промышленности и в сложных приборах, где важно точное регулирование скорости работы (прокатные станы, мощные металлорежущие станки, тяга на транспорте). Их отличает высокая стоимость, а также некоторые преимущества, которые оказываются важными на сложном оборудовании: более высокий КПД, возможность плавной и точной регулировки оборотов, частота вращения может быть очень высокой, чем в случае с переменным.
Также в наукоемких точных отраслях используются шаговые двигатели и серводвигатели, в которых можно регулировать многие параметры.
Статью предоставила компания НПП «Сервомеханизмы» www.servomh.ru — производитель и поставщик устройств линейного перемещения, электродвигателей, муфт для валов и комплектующих.
Рассмотрите их устройство, принцип действия, область применения. Стоит отметить, что сегодня в промышленности более 95 процентов всех используемых двигателей приходится на асинхронные машины. Они получили большое распространение в связи с тем, что у них высокая надежность, они могут служить очень долго за счёт своей ремонтопригодности.
Принцип работы асинхронных двигателей
Чтобы понять, как функционирует электродвигатель, можно провести небольшой эксперимент. Конечно, для этого потребуется наличие специального инструмента. Установите магнит в форме подковы так, чтобы он приводился в движение при помощи ручки. Как вы знаете, у магнита имеется два полюса. Между ними необходимо расположить цилиндр, изготовленный из меди. С таким расчетом, что он может свободно вокруг своей оси вращаться. Теперь сам эксперимент. Начинаете раскручивать магнит, при этом создается поле, которое двигается. Внутри медного цилиндра начинают возникать которые противодействуют полю магнита.
В результате этого медный цилиндр начинает вращение в ту сторону, в которую двигается Причем его скорость оказывается несколько ниже. Причина этого — при равной скорости силовые линии перестают пересекаться с полем магнита. Магнитное поле вращается синхронно. А вот скорость движения самого магнита несинхронна. А если немножко сократить определение, то асинхронна. Отсюда и название электрической машины — асинхронного электродвигателя. Если грубо, то схема электродвигателя переменного тока примерно такая же, как и в приведенном эксперименте. Только магнитное поле создается статорной обмоткой.
Двигатели постоянного тока
Они несколько отличаются от асинхронных электродвигателей переменного тока. Во-первых, в нём имеется одна или две статорных обмотки. Во-вторых, способ изменения частоты вращения ротора несколько иной. Но направление вращения ротора изменяется переполюсовкой (у асинхронных машин меняются местами фазы питающей сети). Изменить скорость ротора двигателя постоянного тока можно, если увеличить или уменьшить напряжение, подаваемое на статорную обмотку.
Не может работать без обмотки возбуждения, которая находится на роторе. Передача напряжения происходит при помощи щеточного узла. Это самый ненадежный элемент конструкции. Щетки, изготовленные из графита, со временем стираются, что приводит к выходу из строя мотора, ему необходим ремонт. Заметьте, что электродвигатели постоянного и переменного тока имеют одни и те же элементы, но их конструкции отличаются существенно.
Конструкция электродвигателя
Как и любая другая нестатическая электрическая машина, асинхронный двигатель состоит из двух основных частей — статора и ротора. Первый элемент неподвижный, на нём размещаются три обмотки, которые соединяются по определенной схеме. Ротор является подвижным, его конструкция называется «беличьей клеткой». Причина такого названия в том, что внутреннее устройство очень похоже на колесо с белкой.
Последней, конечно же, нет в электродвигателе. Центровка ротора производится при помощи двух крышек, устанавливаемых на статоре. В них имеются подшипники, которые облегчают вращение. На задней части электродвигателя устанавливается крыльчатка. С ее помощью проводится охлаждение электрической машины. На статоре сделаны ребра, которые улучшают теплоотдачу. Таким образом электродвигатели переменного тока работают в нормальном тепловом режиме.
Статор асинхронного двигателя
Стоит отметить, что у статора современных асинхронных электродвигателей полюсы невыраженные. Если говорить проще, то внутри вся поверхность идеально гладкая. В целях уменьшения потерь на вихревых токах, сердечник набирается из очень тонких листов стали. Эти листы очень плотно прилегают друг другу и впоследствии закрепляются в корпусе из стали. Статор имеет пазы для закладывания обмоток.
Обмотки изготовлены из медного провода. Соединение их производится в «звезду» или «треугольник». В верхней части корпуса имеется небольшой щиток, полностью заизолированный. В нем находятся контакты для подключения и соединения обмоток. Причем соединить обмотки можно при помощи перемычек, устанавливаемых в этом щитке. Устройство электродвигателя переменного тока позволяет быстро провести соединение обмоток в нужную схему.
Ротор асинхронного электродвигателя
О нем было уже немного сказано. Он похож на беличью клетку. Конструкция ротора собирается из тонких стальных листов, как и статора. В пазах ротора находится обмотка, но она может быть нескольких типов. Все зависит от того, фазный или короткозамкнутый ротор. Наиболее распространенные последние конструкции. Толстые медные стержни укладываются в пазы без изоляционного материала. С обоих концов эти стержни соединяются медными кольцами. Иногда вместо «беличьей клетки» применяются литые роторы.
Но есть еще электродвигатели переменного тока с фазным ротором. Они используются намного реже, в основном для электродвигателей, у которых очень большая мощность. Второй случай, при котором необходимо использовать фазные роторы в электродвигателях — создание большого усилия в момент запуска. Правда, для этого необходимо использовать специальный реостат.
Способы запуска асинхронного электродвигателя
Запустить асинхронный электродвигатель переменного тока несложно, достаточно только подключить статорные обмотки в трехфазную сеть. Производится подключение при помощи магнитных пускателей. Благодаря им можно практически автоматизировать запуск. Даже реверс сделать можно без особых трудностей. Но в некоторых случаях необходимо снижать напряжение, которое подводится к статорным обмоткам.
Производится это благодаря использованию схемы подключения типа «треугольник». При этом запуск производится, когда обмотки соединены по схеме «звезда». При увеличении числа оборотов, достижении максимального значения обмотки необходимо переключить на схему «треугольник». При этом происходит уменьшение потребляемого тока примерно в три раза. Но необходимо учитывать, что не каждый статор может нормально функционировать при подключении по схеме «треугольник».
Регулирование частоты вращения
В промышленности и быту все большую популярность приобретают частотные преобразователи. С их помощью можно легким движением руки изменить скорость вращения ротора. Стоит заметить, что электродвигатели переменного тока используются совместно с частотными преобразователями в большинстве механизмов. Он позволяет осуществить тонкую настройку привода, при этом нет необходимости использовать магнитные пускатели. Все органы управления подключаются к контактам на частотном преобразователе. Настройки позволяют изменять время разгона ротора электродвигателя, его остановки, время минимальной и максимальной скорости, а также множество других защитных функций.
Заключение
Теперь вы знаете, как происходит работа электродвигателя переменного тока. Даже изучили конструкцию наиболее популярного асинхронного двигателя. Он является самым дешевым из всех, которые представлены на рынке. Кроме того, для его нормального функционирования нет необходимости использовать различные вспомогательные устройства. В частности, реостаты. И только такое дополнение, как частотный преобразователь, способно облегчить эксплуатацию асинхронного электродвигателя, существенно расширить его возможности.
Электродвигатель переменного тока
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу)
Электрический двигатель — это, электрическая машина , в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
Классификация электродвигателей
- Двигатель постоянного тока постоянным током ;
- Коллекторные двигатели постоянного тока. Разновидности:
- Бесколлекторные двигатели постоянного тока (вентильные двигатели) с электронным переключателем тока;
- Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током , имеет две разновидности:
- Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения;
- Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением.
- Однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь
- Многофазные
- Шаговые двигатели — Электродвигатели, которые имеют конечное число положений ротора. Заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие.
- Вентильные двигатели — Электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора (ДПР), системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора).
- Универсальный коллекторный двигатель (УКД) — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе.
Из-за связи с низкой частотой сети (50 Герц) асинхронные и синхронные двигатели имеют больший вес и размеры, чем коллекторный двигатель постоянного тока и универсальный коллекторный двигатель той же мощности. При применении выпрямителя и инвертора с частотой значительно большей 50 Гц вес и размеры асинхронных и синхронных двигателей приближаются к весу и размерам коллекторного двигателя постоянного тока и универсального коллекторного двигателя той же мощности.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
История.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлова. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Ссылки
Wikimedia Foundation . 2010 .
Смотреть что такое «Электродвигатель переменного тока» в других словарях:
электродвигатель переменного тока — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN ас motor …
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, ма … Википедия
Машина переменного тока, предназначенная для работы в режиме двигателя (см. Переменного тока машина). П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели (См. Синхронный электродвигатель) применяют в… …
Электрическая машина, применяемая для получения переменного тока (генератор) или для преобразования электрической энергии в механическую (двигатель) либо в электрическую энергию другого напряжения или частоты (преобразователь) П. т. м.… … Большая советская энциклопедия
Машина перем. тока, предназнач. для работы в режиме двигателя. П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели применяют в электроприводах в осн. тогда, когда требуется постоянство угловой скорости. Из асинхронных… … Большой энциклопедический политехнический словарь
электропривод переменного тока — электропривод постоянного [переменного] тока Электропривод, содержащий электродвигатель постоянного [переменного] тока. [ГОСТ Р 50369 92] Тематики электропривод EN ac drivealternating current drive DE Wechselstromantrieb … Справочник технического переводчика
электропривод постоянного (переменного) тока — 3.1.3 электропривод постоянного (переменного) тока: Привод, содержащий электродвигатель постоянного (переменного) тока и редуктор;
Высоковольтные электродвигатели
Высоковольтные электродвигатели
Высоковольтные двигатели концерна «Русэлпром» рассчитаны на взаимодействие с промышленными электрическими сетями частотой 50 и 60 Гц с номинальным напряжением от 3000 до 11 000 В. Различные виды защиты и охлаждения обеспечивают универсальность применения этих электрических машин. Они долговечны, отличаются удобством обслуживания и эксплуатации, высокими энергетическими параметрами и низким уровнем шума. Для каждого варианта применения концерн «Русэлпром» предлагает соответствующее решение с учетом пожеланий клиентов.
Основные характеристики двигателей в базовом исполнении:
- Мощность, кВт: 160 — 10000
- Частота вращения, об/мин: 3000 — 75
- Напряжение питания переменного тока, В: 3000, 6000, 10000 и другие нестандартные
- Габарит (в.о.в.), мм: 355 — 1800
Наши конкурентные преимущества:
- концерн разрабатывает и изготавливает электрические машины по индивидуальным заказам без увеличения сроков изготовления
- более высокий КПД относительно продукции иных производителей России и стран СНГ
- изготовление электродвигателей с промежуточной нестандартной мощностью, что сокращает издержки без потери качества и гарантийного срока
- показатель уровня обслуживания покупателей 95%
- изготовление электродвигателей под вашей торговой маркой
- условия оплаты и поставки с учетом особенностей склада на вашей территории
- процедура trade in, которая распространяется не только на двигатели, но и на агрегаты
При заказе вы можете выбрать:
- изготовление сертифицированных двигателей для работы в составе частотно-регулируемого привода
- подшипники различных производителей – SKF, FAG или отечественные. При необходимости в двигателе могут устанавливаться токоизолированные подшипники
- смазку различных производителей. Унификация еще на этапе поставки смазки с принятой на предприятии эксплуатации позволяет запускать в эксплуатацию двигатель без замены смазки и требующейся при этом промывки подшипник
- необходимую конфигурацию мест под датчики вибрации. Наиболее частыми являются заказы двигателей с местами под датчики вибрации и датчики ударных испульсов SPM, SLD. При заказе нами предлагается удобная графическая схема выбора осей измерения вибрации. Для установки уровней вибрации «Предупреждение» и «Отключение» рекомендуется использовать нормы, установленные ГОСТ Р ИСО 10816-3
- диаметр кабельного ввода силовой коробки выводов
- овальные установочные размеры в лапах
- необходимый цвет двигателя или поставку в загрунтованном виде
- протокол приемо-сдаточных испытаний
Двигатели постоянного тока — MirMarine
Двигателями постоянного тока называются электрические машины постоянного тока, преобразующие электрическую энергию в механическую.
В двигателе магнитные поля создаются полюсами обмотки возбуждения и обмоткой якоря, по которым пропускается ток. При пропускании через них постоянного тока, якорь машины придет во вращение. Направление вращения якоря определяется правилом левой руки. При этом, если изменить направление тока в якоре или в обмотке возбуждения, то направление вращения двигателя также изменится.
При работе электродвигателя его якорь с обмоткой, вращаясь в магнитном поле, создаваемом магнитами полюсов, пересекает силовые магнитные линии магнитного потока полюсов и, следовательно, согласно закону электромагнитной индукции, в обмотке якоря индуктируется э. д. с. Направление этой э. д. с. обратно направлению тока, текущего в обмотке якоря (определяется по правилу правой руки), ввиду чего она называется обратной э. д. с. или противоэлектродвижущей силой (п. э. д. с.).
Необходимо заметить, что во время пуска двигателя противоэлектродвижущая сила будет равна нулю и ток якоря может достигнуть недопустимо большого значения, так как сопротивление обмотки якоря незначительно. Поэтому в момент пуска в цепь якоря последовательно вводят дополнительное сопротивление—пусковой реостат, выполняющий роль дополнительного сопротивления при пуске во избежание разрушения обмотки якоря. С началом вращения якоря нарастает п. э. д. с., снижающая величину тока в якоре, поэтому по мере раскручивания двигателя (с увеличением числа оборотов двигателя), сопротивление пускового реостата постепенно уменьшают и совсем выключают, как только двигатель разовьет номинальное число оборотов, так как в этом случае обмотка якоря перегрузки испытывать не будет.
Электродвигатели постоянного тока, так же как и генераторы, в зависимости от способа включения обмоток возбуждения и якоря подразделяются на двигатели:
- с независимым возбуждением;
- с последовательным возбуждением или сериесные;
- с параллельным возбуждением или шунтовые;
- смешанного возбуждения или компаундные;
На судах морского флота электродвигатели постоянного тока последовательного возбуждения с легкой параллельной обмоткой применяются для привода в действие палубных механизмов (брашпилей, шпилей, лебедок, кранов), где требуется большой вращающий момент при пуске. Электродвигатели постоянного тока параллельного возбуждения применяются для привода механизмов, у которых необходимо иметь постоянное число оборотов независимо от их нагрузки и у которых не требуется наличие большого пускового момента (вспомогательные механизмы и насосы, обслуживающие главные двигатели и судовые системы, станки и т. д.).
Электродвигатели постоянного тока смешанного возбуждения применяются для привода в движение механизмов, требующих большого пускового момента и сохранения постоянного числа оборотов, а также имеющих значительный маховой момент (палубные механизмы, рулевые приводы, валоповоротные устройства и др.).
Наиболее широкое распространение эти двигатели получили за свои положительные качества, к которым можно отнести:
- большой пусковой момент;
- способность выносить значительную перегрузку;
- допустимость регулировки числа оборотов в широких пределах;
- сохранение постоянного числа оборотов при изменяющейся нагрузке.
По конструктивному выполнению электродвигатели делятся на электродвигатели с горизонтальным валом и электродвигатели с вертикальным валом.
По типу защиты от воздействия внешней среды электродвигатели бывают такие же, как и генераторы:
- открытые;
- защищенные;
- брызгозащищенные;
- водозащищенные;
- герметические;
- взрывобезопасные;
Процессы управления электродвигателями постоянного тока сводятся в основном к выполнению следующих операций:
- пуску в ход электродвигателя;
- остановке;
- торможению;
- реверсированию и регулированию скорости вращения электродвигателя
Эти операции могут быть выполнены вручную, автоматически или полуавтоматически при помощи соответствующей аппаратуры управления (пусковые и регулировочные реостаты, электрические и механические тормозные устройства и др.).
Пусковые реостаты устанавливают для ограничения силы пускового тока. Число оборотов электродвигателя регулируют изменением напряжения на зажимах якоря или изменением магнитного потока, создаваемого обмоткой возбуждения (т. е. изменением силы тока возбуждения электродвигателя при помощи регулировочного реостата). Для быстрой остановки электродвигателей необходимо применять торможение. Торможение электродвигателей постоянного тока может быть механическим и электрическим.
Механическое торможение осуществляется при помощи колодочных, ленточных и дисковых тормозов.
Электрическое торможение может быть произведено или в виде полезного торможения, при котором двигатель обращается в генератор и возвращает электрическую энергию в сеть, или же в виде реостатного торможения, при котором электрическая энергия превращается в тепловую, выделяющуюся в реостате.
Изменить направление вращения электродвигателя постоянного тока можно двумя способами: изменением направления тока в полюсных обмотках возбуждения, оставив направление тока в обмотке якоря без изменения; изменением направления тока в обмотке якоря, оставив без изменения направление тока в полюсных обмотках возбуждения. Если одновременно изменить направление тока и в обмотке якоря, и в обмотке возбуждения, то направление вращения двигателя не изменится.
Похожие статьи
Электродвигатели, преобразование энергии – РегионПривод
Электродвигатель – это механизм, который служит для преобразования электрической энергии в механическую. В основе принципа работы любого электродвигателя находится закон электромагнитной индукции. Обычно электродвигатель состоит из неподвижной части (статора) и ротора (или якоря), в которых создаются неподвижные или вращающиеся магнитные поля. Электродвигатели бывают самых различных типов и модификаций, широко применяются во многих отраслях человеческой деятельности, и представляют собой один из главных компонентов в механизмах и приводах самого различного назначения. ОТ характеристик электродвигателя напрямую зависит эффективность производства.
Классификация электродвигателей
Главными частями, из которых состоит Электродвигатели, являются статор и ротор. Ротор — та часть двигателя, которая вращается, а статор – которая остается неподвижной. Принцип работы электродвигателя заключен во взаимодействии вращающегося магнитного поля, создаваемого обмоткой статора и электрического тока, который находится в замкнутой обмотке ротора. Этот процесс инициирует вращение ротора в направлении поля.
Основные виды электродвигателей:
- Двигатель переменного тока;
- Двигатель постоянного тока;
- Многофазный двигатель;
- Однофазный двигатель;
- Вентильный двигатель;
- Шаговый двигатель;
- Универсальный коллекторный двигатель.
Если говорить о таких электродвигателях как асинхронные электродвигатели, то они относятся к виду двигателей переменного тока. Такие двигатели бывают как однофазные электродвигатели, так и двух- и трехфазные. В асинхронных электродвигателях частота переменного тока в обмотке не совпадает с частотой вращения ротора. Процесс работы асинхронного электродвигателя обеспечивается разницей во времени генерации магнитных полей статора и ротора. Вращение ротора из-за этого задерживается относительно поля статора. Купить электродвигатель асинхронного типа можно для машин, в которых не требуются особые условия работы пускового механизма.
Виды электродвигателей по степени защищенности от внешней среды:
- Взрывозащищенные;
- Защищенные;
- Закрытые.
Взрывозащищенные электродвигатели имеют прочный корпус, который если случится взрыв двигатели, предотвратит поражение всех других частей механизма и воспрепятствует возникновению пожара.
Защищенные электродвигатели при эксплуатации закрыты специальными заслонками и сетками, которые защищают механизм от попадания инородных предметов. Используются в среде, где нет повышенной влажности воздуха и примесей газов, пыли, дыма и химических веществ.
Закрытые электродвигатели имеют специальную оболочку, которая не дает проникать пыли, газам, влаге и другим веществам и элементам, которые способны причинить вред механизму двигателя. Такие электродвигатели бывают герметичными и негерметичными.
Электродвигатели siemens и электродвигатели able выпускаются в большинстве вышеперечисленных видов электродвигателей, и среди них довольно просто выбрать самый оптимальный вариант.
Электродвигатели с тормозом
Тормозные электродвигатели обычно устанавливаются на таком оборудовании, которому необходимо иметь возможность осуществить мгновенную остановку. Это может быть конвейерное или станочное оборудование, или другое оборудование, где остановка обусловлена требованиями техники безопасности. Они активно применяются в транспортных лифтах, подъемных кранах, складских укладочных машинах, прокатном и швейном оборудовании, эскалаторах, станках для дерева и металла, задвижках, прокатном оборудовании – одним словом везде, где необходима быстрая остановка системы в определенном положении и в определенное время.
Если не вдаваться в подробности, электродвигатель с тормозом представляет собой обычный промышленный асинхронный электродвигатель, в котором установлен электромагнитная тормозная система. Это обуславливает тот факт, что от обычных двигателей электродвигатель с тормозом отличается только длиной, тогда как все посадочные и соединительные элементы остаются на прежнем месте. Длина изменяется из-за необходимости установки на двигатель специального кожуха. Как и обычные двигатели, в зависимости от типа питания, электродвигатели с тормозом делятся на двигатели, питаемые переменным током, и электродвигатели, питаемые постоянным током.
Главными элементами тормозной системы электродвигателя являются:
- Электромагнит, состоящий из корпуса, в котором находятся катушка или набор катушек;
- Якорь, представляющий собой исполнительный элемент, или поверхность для тормозного диска;
- Сам тормозной диск, который перемещается по зубчатой втулке, закрепленной на валу заторможенного привода или двигателя.
Когда двигатель находится в состоянии покоя, он заторможен. Пружинный нажим на якорь оказывает, в свою очередь, давление на тормозной диск, в связи с чем возникает его блокировка. Когда на катушку электромагнита подается электрический ток, возбужденный электромагнит притягивает к себе якорь, и происходит разблокировка тормоза. Нажим якоря снимается, и возникает свободное вращение вала электрического двигателя. Электродвигатели с тормозом маркируются буквой «Е», или «Е2» (для двигателей с ручной системой торможения).
Регулирование скорости вращения электродвигателя
Вопрос регулирования скорости вращения электродвигателя очень актуален, ведь снижение и повышение оборотов электродвигателя может понадобится в самых разнообразных механизмах, от бытовых приборов, таких как швейных машин или кухонной техники, до промышленных механизмов и станкового оборудования. Казалось бы, самый простой способ – просто понизить питающее напряжение электродвигателя. Это подходит для двигателей постоянного тока, регуляторы напряжения постоянного тока достаточно просты в производстве и доступны. Однако, в настоящее время основная масса приборов, механизмов и инструментов, занятых в производстве, базируются на асинхронных двигателях переменного тока. В этом случае при понижении напряжения электродвигатель резко снижает количество оборотов, теряет мощность и полностью останавливается. Как понизить обороты электродвигателя, или как увеличить их? Для регулировки скорости вращения таких электродвигателей и были разработаны частотные инверторные преобразователи, или как их чаще называют – частотники.
Область применения частотных преобразователей достаточно обширна. Они востребованы в станках и электроприводах промышленных механизмов, конвейерах, системах вытяжной вентиляции и так далее. Принцип работы частотника заключается в правиле вычисления угловой скорости вращения вала, которое включает в себя такой фактор как частота питающей сети. Таким образом, меняя частоту питания обмотки электродвигателя, можно регулировать скорость вращения ротора двигателя в прямой зависимости, таким образом уменьшить обороты электродвигателя или повысить их. Эти приборы имеют также название «инверторы», благодаря методу, при помощи которого решается задача одновременного регулирования частоты и напряжения на выходе преобразователя. Все частотные преобразователи в обязательном порядке маркируются табличками, ан которых указаны их характеристики:
- Максимально возможная мощность электродвигателя;
- Напряжение запитывающей сети;
- Количество фаз (однофазный, трехфазный).
Большинство промышленных частотных преобразователей предназначены для работы в трехфазных сетях переменного тока, однако встречаются и другие модели, например частотники для однофазных двигателей.
Применение электродвигателя
Жизнь современного человека тяжело представить без такого механизма как электродвигатель. Оглянитесь вокруг – они получил практически повсеместное распространение. Сегодня они используются не только во всех отраслях промышленности, но и в транспорте, предметах и устройствах, окружающих в повседневной жизни, на работе и дома. Фены, вентиляторы, швейные машины, строительные инструменты – вот далеко не полный перечень устройств, где используются электродвигатели.
Особой надежностью отличаются именно асинхронные электродвигатели, благодаря чему они находят широкое применение в приводах металлообрабатывающих, деревообрабатывающих станков и других промышленных станков, в кузнечных прессах, грузоподъёмных машинах, лифтах, ткацких, швейных и землеройных машинах, промышленных вентиляторах, компрессорах, насосах, центрифугах, бетономешалках. Крановые электродвигатели используются в капитальном, промышленном и гражданском строительстве, в горнодобывающей, металлургической отраслях, энергетике, транспорте.
Метро, трамвай, троллейбус – все эти виды транспорта обязаны своему существованию электродвигателю. Любой офис или жилой дом сегодня невозможно представить без кондиционера или системы очистки воздуха – в них тоже применяются электродвигатели. Функционирование большинства современного оборудования невозможно без электродвигателя, в связи с чем очень многое зависит от качества и надежности этого механизма. Его поломка может привести к очень печальным результатам, вплоть до остановки производства и огромным финансовым убыткам. Следовательно, приобретать электродвигатели можно только у надёжного и проверенного поставщика, который гарантирует качество продукции.
Принцип работы электродвигателя
Принцип работы электродвигателя заключается в эффекте магнетизма, который позволяет эффективно преобразовывать электрическую энергию в механическую. Принцип преобразования энергии в разных типах электродвигателей одинаковый, для всех типов электродвигателей, но конструкция двигателей и способы контроля скорости вращающегося момента могут различаться. Всем со школьной скамьи известен простейший пример электродвигателя – когда рамка вращается между полюсами постоянного магнита. Разумеется, устройство электродвигателя, который применяется в промышленных механизмах или бытовых приборах намного сложнее. Давайте рассмотрим как работает асинхронный электродвигатель, который получил наибольшее распространение в промышленности.
Принцип работы асинхронного электродвигателя.
Принцип действия асинхронного двигателя, как и прочих, основан на использовании вращающегося магнитного поля. Скорость вращения магнитного поля принято называть синхронной, так как она соответствует скорости вращения магнита. При этом скорость вращения цилиндра принято называть асинхронной, то есть не совпадающей со скоростью вращения магнита. Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением. Чтобы заставить заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора обычно используется трехфазный ток.
Устройство электродвигателя
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя, размещаются три обмотки, сети трехфазного тока расположенные одна относительно другой под углом 120°. Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя. Если обмотки соединить между собой и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся. Суммарный магнитный поток в тоже время будет менять свое направление с изменением направления тока в обмотках статора (полюсов). При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим, таким образом асинхронный электродвигатель.
Обмотки статора могут быть соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником». Если поменять местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное. Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора. Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Подключение электродвигателя
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой. Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов. Собранный сердечник статора закрепляют в стальном корпусе. В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Ротор асинхронного двигателя, подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка. В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором. Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
Асинхронный двигатель с фазным ротором (с контактными кольцами) применяется обычно в электродвигателях большой мощности и в тех случаях; когда необходимо, чтобы электродвигатель создавал большое усилие при трогании с места. Достигается это тем, что в обмотки фазного двигателя включается пусковой реостат.
Расчёт мощности электродвигателя
Выбирая электродвигатель необходимо ориентироваться на потребляемую оборудованием мощность. Определить мощность можно расчетным путем, используя следующие формулы и коэффициенты:
Мощность на валу электродвигателя определяется по следующей формуле:
, где
Рм – потребляемая механизмом мощность;
ηп – КПД передачи.
Номинальную мощность электродвигателя желательно выбирать больше расчетного значения.
Остальные технические характеристики, необходимые для расчета мощности двигателя, можно найти в каталогах для каждого типа механизмов. При выборе электродвигателя запас должен быть небольшой мощности. При значительном запасе мощности снижается КПД привода. В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
Расчет пускового тока электродвигателя
Зная тип и номинальную мощность электродвигателя, можно рассчитать номинальный ток:
Номинальный ток трехфазных электродвигателей переменного тока:
, где
PH – номинальная мощность электродвигателя;
UH — номинальное напряжение электродвигателя,
ηH — КПД электродвигателя;
cosφH — коэффициент мощности электродвигателя.
Номинальные значения мощности, напряжения и КПД можно найти в технической документации на конкретную модель электродвигателя. Зная значение номинального тока, можно рассчитать пусковой ток.
Формула расчета пускового тока электродвигателей.
, где
IH – номинальное значение тока;
Кп – кратность постоянного тока к номинальному значению.
Пусковой ток необходимо рассчитывать для каждого двигателя в цепи. Зная эту величину, легче подобрать тип автоматического выключателя для защиты всей цепи.
какие они бывают. Работа синхронных двигателей
Электрические двигатели предназначены для преобразования электрической энергии в механическую. Первые их прототипы были созданы в 19 веке, а сегодня эти устройства максимально интегрированы в жизнь современного человечества. Примеры их использования можно встретить в любой сфере жизнедеятельности: от общественного транспорта до домашней кофемолки.
Электрический двигатель: вид в разрезе
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Классификация электрических двигателей
Все электродвигатели между собой классифицируют в первую очередь по типу тока, протекающему через них. В свою очередь, каждая из этих групп тоже делить на несколько видов, в зависимости от технологических особенностей.
Двигатели постоянного тока
На маломощных двигателях постоянного тока магнитное поле создается постоянным магнитом, устанавливаемым в корпусе устройства, а обмотка якоря закрепляется на вращающемся валу. Принципиальная схема ДПТ выглядит следующим образом:
Обмотка, расположенная на сердечнике, изготавливается из ферромагнитных материалов и состоит из двух частей, последовательно соединенных между собой. Своими концами они подсоединяются к коллекторным пластинам, к которым прижимаются графитовые щетки. На одну из них подается положительный потенциал от источника постоянного тока, а на другую – отрицательный.
После подачи питания на двигатель происходит следующее:
- Ток от нижней «плюсовой» щетки подается на ту коллекторную пластину, к контактной платформе которой она подключена.
- Прохождение тока по обмотке на коллекторную пластину (обозначено пунктирной красной стрелкой), подключенную к верхней «отрицательной» щетке создает электромагнитное поле.
- Согласно правилу буравчика, в правой верхней части якоря возникает магнитное поле южного, а в левой нижней — северного магнитного полюса.
- Магнитные поля с одинаковым потенциалом отталкиваются друг от друга и приводят ротор во вращательное движение, обозначенное на схеме красной стрелкой.
- Устройство коллекторных пластин приводит к смене направления протекания тока по обмотке во время инерционного вращения, и рабочий цикл повторяется вновь.
Самый простой электрический двигатель
При очевидной простоте конструкции существенным недостатком таких двигателей является низкий КПД, обусловленный большими потерями энергии. Сегодня ДПТ с постоянными магнитами используются в простых бытовых приборах и детских игрушках.
Устройство двигателей постоянного тока большой мощности, используемых в производственных целях, не предусматривает использование постоянных магнитов (они занимали бы слишком много места). В этих машинах используется следующая конструкция:
- обмотка состоит из большего количества секций, представляющих собой металлический стержень;
- каждая обмотка отдельно подключается к положительному и отрицательному полюсу;
- количество контактных площадок на коллекторном устройстве соответствует количеству обмоток.
Таким образом, снижение потерь электроэнергии обеспечивается плавным подключением каждой обмотки к щеткам и источнику питания. На следующей картинке представлена конструкция якоря такого двигателя:
Устройство электрических двигателей постоянного тока позволяет легко обратить направление вращения ротора с помощью простой смены полярности на источнике питания.
Функциональные особенности электродвигателей определяются наличием некоторых «хитростей», к которым относится сдвиг токосъемных щеток и несколько схем подключения.
Сдвиг узла токосъемных щеток относительно вращения вала происходит после запуска двигателя и изменения подаваемой нагрузки. Это позволяет компенсировать «реакцию якоря» — эффект, снижающий эффективность машины за счет торможения вала.
Есть три способа подключения ДПТ:
- Схема с параллельным возбуждением предусматривает параллельное подключение независимой обмотки, как правило, регулируемой реостатом. Так обеспечивается максимальная стабильность скорости вращения и её плавная регулировка. Именно благодаря этому двигатели с параллельным возбуждением находят широкое применение в грузоподъемном оборудовании, на электрическом транспорте и станках.
- Схема с последовательным возбуждением тоже предусматривает использование дополнительной обмотки, но подключается она последовательно с основной. Это позволяет при необходимости резко увеличить крутящий момент двигателя, к примеру, на старте движения железнодорожного состава.
- Смешанная схема использует преимущества обоих способов подключения, описанных выше.
Биполярный электрический двигатель
Двигатели переменного тока
Главным отличием этих двигателей от описанных ранее моделей заключается в токе, протекающем по их обмотке. Он описывает по синусоидальному закону и постоянно меняет свое направление. Соответственно и питание этих двигателей осуществляется от генераторов со знакопеременной величиной.
Одним из главных конструктивных отличий является устройство статора, представляющего собой магнитопровод со специальными пазами для расположения витков обмотки.
Двигатели переменного тока классифицируют по принципу работы на синхронные и асинхронные. Коротко говоря, это означает, что в первых частота вращения ротора совпадает с частотой вращения магнитного поля в статоре, а во вторых – нет.
Синхронные двигатели
В основе работы синхронных электродвигателей переменного тока тоже лежит принцип взаимодействия полей, возникающих внутри устройства, однако в их конструкции постоянные магниты закрепляются на роторе, а по статору проводится обмотка. Принцип их действия демонстрирует следующая схема:
Проводники обмотки, по которой проходит ток, показанные на рисунке в виде рамки. Вращение ротора происходит следующим образом:
- На определенный момент времени ротор с закрепленным на нем постоянным магнитом находится в свободном вращении.
- На обмотке в момент прохождения через нее положительной полуволны формируется магнитное поле с диаметрально противоположными полюсами Sст и Nст. Оно показано на левой части приведенной схемы.
- Одноименные полюса постоянного магнита и магнитного поля статора отталкиваются друг от друга и приводят двигатель в положение, показанное на правой части схемы.
В реальных условиях для создания постоянного плавного вращения двигателя используется не одна катушка обмотки, а несколько. Они поочередно пропускают через себя ток, благодаря чему создается вращающееся магнитное поле.
Асинхронные двигатели
А асинхронном двигателе переменного тока вращающееся магнитное поле создается тремя (для сети 380 В) обмотками статора. Их подключение к источнику питания осуществляется через клеммную коробку, а охлаждение — вмонтированным в двигатель вентилятором.
Ротор, собранный из нескольких замкнутых между собой металлических стержней, жестко соединен с валом, составляя с ним одно целое. Именно из-за соединения стержней межу собой этот тип ротора называется короткозамкнутым. Благодаря отсутствию токопроводящих щеток в данной конструкции значительно упрощается техническое обслуживание двигателя, увеличивается срок службы и надежность. Главной причиной выхода из строя двигателей этого типа является износ подшипников вала.
Принцип работы асинхронного двигателя основывается на законе электромагнитной индукции – если частота вращения электромагнитного поля обмоток статора превышает частоту вращения ротора, в нем наводится электродвижущая сила. Это важно, поскольку при одинаковой частоте ЭДС не возникает и, соответственно, не возникает вращения. В действительности нагрузка на вал и сопротивление от трения подшипников всегда замедляет ротор и создает достаточные для работы условия.
Главным недостатком двигателей данного типа является невозможность получения постоянной частоты вращения вала. Дело в том, что рабочие характеристики устройства изменяются в зависимости от различных факторов. К примеру, без нагрузки на вал циркулярная пила вращается с максимальной скоростью. Когда мы подводим к пильному полотну доску и начинаем её резать, частота вращения диска заметно снижается. Соответственно, снижается и скорость вращения ротора относительно электромагнитного поля, что приводит к наведению еще большей ЭДС. Это увеличивает потребляемый ток и рабочая мощность мотора увеличивается до максимальной.
Принцип работы электрического мотора
Важно подбирать двигатель подходящей мощности – слишком низкая приведет к повреждению короткозамкнутого ротора из-за превышения расчетного максимума ЭДС, а слишком высокая приводит к необоснованным энергозатратам.
Асинхронные двигатели переменного тока рассчитаны на работу от трехфазной электрической сети, однако могут быть подключены и в однофазную сеть. Так, например, они используются в стиральных машинах и станках для домашних мастерских. Однофазный двигатель имеет примерно на 30% более низкую мощность, по сравнению с трехфазным – от 5 до 10 кВт.
Ввиду простоты исполнения и надежности асинхронные двигатели переменного тока наиболее распространены не только в производственном оборудовании, но и в бытовой технике.
Универсальные коллекторные двигатели
Во многих бытовых электроприборах необходимо наличие высокой скорости вращения двигателя и крутящего момента при малых пусковых токах и плавной регулировке. Всем этим требования удовлетворяют коллекторные двигатели, называемые универсальными. По своему устройству они очень похожи на двигатели постоянного тока с последовательным возбуждением.
Главным отличием от ДПТ является магнитная система, комплектуемая несколькими изолированными друг от друга листами электротехнической стали, к полюсам которых подсоединены по две секции обмотки. Такая конструкция снижает нагрев элементов токами Фуко и перемагничивание.
Высокая синхронность магнитных полей в универсальных коллекторных двигателях сохраняет высокую скорость вращения даже под большой нагрузкой на вал. Поэтому их используют в маломощном быстроходном оборудовании и домашней технике. При подключении в цепь регулируемого трансформатора появляется возможность плавной настройки частоты вращения.
Главный недостаток таких электромоторов заключается в низком моторесурсе, обусловленном быстрым стиранием графитовых щеток.
Сегодня представить себе человеческую цивилизацию и высокотехнологическое общество без электричества невозможно. Одним из основных аппаратов, которые обеспечивают работу электрических приборов, является двигатель. Эта машина нашла самое широкое распространение: от промышленности (вентиляторы, дробилки, компрессоры) до бытового использования (стиральные машины, дрели и прочее). Но в чем состоит принцип работы электродвигателя?
Назначение
Принцип работы электродвигателя и его основные цели заключаются в передаче рабочим органам необходимой для совершения технологических процессов механической энергии. Сам двигатель вырабатывает ее за счет потребляемой из сети электроэнергии. По сути говоря, принцип работы электродвигателя заключается в преобразовании электрический энергии в механическую. Количество вырабатываемой им механической энергии за одну единицу времени называется мощностью.
Виды двигателей
В зависимости от характеристик питающей сети можно выделить два основных типа двигателя: на постоянном и на переменном токе. Наиболее распространенными являются моторы с последовательным, независимым и смешанным возбуждением. Примерами двигателей на могут выступить синхронные и асинхронные машины. Несмотря на кажущееся разнообразие, устройство и принцип работы электродвигателя любого назначения основаны на взаимодействии проводника с током и магнитным полем либо же постоянного магнита (ферромагнитного объекта) с магнитным полем.
Рамка с током — прообраз двигателя
Основным моментом в таком вопросе, как принцип работы электродвигателя, можно назвать появление крутящего момента. Рассмотреть такое явление можно на примере рамки с током, которая состоит из двух проводников и магнита. К проводникам ток подводится через контактные кольца, которые закреплены на оси вращающейся рамки. В соответствии со знаменитым правилом левой руки на рамку будут действовать силы, которые создадут крутящий момент относительно оси. Она под действием этой суммарной силы будет вращаться по направлению против часовой стрелки. Известно, что этот момент вращения прямо пропорционален магнитной индукции (B), (I), площади рамки (S) и зависит от угла между линиями поля и осью последней. Однако под действием момента, изменяющегося по своему направлению, рамка будет совершать колебательные движения. Что же предпринять для образования постоянного направления? Тут есть два варианта:
- менять направление электрического тока в рамке и положение проводников относительно полюсов магнита;
- менять направление самого поля, притом что рамка вращается в неизменную сторону.
Первый вариант используется для двигателей постоянного тока. А второй — это принцип работы электродвигателя переменного тока.
Изменение направления тока относительно магнита
Для того чтобы изменить в проводнике рамки с током, необходимо устройство, которое бы задавало это направление в зависимости от расположения проводников. Такая конструкция реализована благодаря использованию скользящих контактов, которые служат для подвода к рамке тока. При замене одним кольцом двух, когда рамка поворачивается на половину оборота, направление тока меняется на противоположное, а крутящий момент его сохраняет. Важно учесть, что одно кольцо собрано из двух половинок, которые изолированы друг от друга.
Конструкция машины постоянного тока
Вышеприведенный пример — это принцип работы электродвигателя постоянного тока. Реальная машина, естественно, имеет более сложную конструкцию, где используются десятки рамок, образующих обмотку якоря. Проводники этой обмотки размещены в специальных пазах в цилиндрическом ферромагнитном сердечнике. Концы обмоток присоединены к изолированных кольцам, которые образуют коллектор. Обмотка, коллектор и сердечник — это якорь, вращающийся в подшипниках на корпусе самого двигателя. Магнитное поле возбуждения создается полюсами постоянных магнитов, которые расположены в корпусе. Обмотка подключается к питающей сети, и ее можно включать как независимо от цепи якоря, так и последовательно. В первом случае электродвигатель будет иметь независимое возбуждение, во втором — последовательное. Также существует конструкция со смешанным возбуждением, когда используются сразу два типа подключения обмотки.
Синхронная машина
Принцип работы заключается в необходимости создания вращающегося магнитного поля. Затем нужно поместить в это поле обтекаемые неизменным в направлении током проводники. Принцип работы синхронного электродвигателя, который получил весьма широкое распространение в промышленности, основан на вышеприведенном примере с рамкой с током. Вращающееся поле, создаваемое магнитом, образуется при помощи системы обмоток, которые подключены к питающей сети. Обычно используют трехфазные обмотки, однако принцип работы переменного тока не будет отличаться от трехфазного, разве что количеством самих фаз, что несущественно при рассмотрении конструктивных особенностей. Обмотки укладывают в пазы статора с некоторым сдвигом по окружности. Это делается для создания вращающегося магнитного поля в образованном воздушном промежутке.
Синхронизм
Очень важным моментом является синхронная работа электродвигателя вышеприведенной конструкции. При взаимодействии магнитного поля с током в обмотке ротора образуется сам процесс вращения двигателя, который будет синхронным по отношению к вращению магнитного поля, образованному на статоре. Синхронизм будет сохраняться до достижения максимального момента, который вызван сопротивлением. При увеличении нагрузки машина может выйти из синхронизма.
Асинхронный двигатель
Принцип работы заключается в наличии вращающегося магнитного поля и замкнутых рамок (контуров) на роторе — крутящейся части. Магнитное поле образуется так же, как и у синхронного двигателя — при помощи расположенных в пазах статора обмоток, которые подключены к сети переменного напряжения. Обмотки ротора состоят из десятка замкнутых контуров-рамок и имеют обычно два типа исполнения: фазное и короткозамкнутое. Принцип работы электродвигателя переменного тока в обоих вариантах одинаковый, меняется только конструктивное исполнение. В случае короткозамкнутого ротора (также известного под названием «беличья клетка») обмотка заливается расплавленным алюминием в пазы. При изготовлении обмотки фазной концы каждой фазы выводят наружу с помощью скользящих колец-контактов, так как это позволит включить в цепь добавочные резисторы, которые необходимы для регулирования частоты вращения двигателя.
Тяговая машина
Принцип работы тягового электродвигателя аналогичен мотору на постоянном токе. От питающей сети ток подают на Далее трехфазный переменный ток передается на специальные Там находится выпрямитель. Он преобразует переменный ток в постоянный. По схеме он проводится одной своей полярностью к контактным проводам, второй — непосредственно к рельсам. Необходимо помнить, что многие тяговые механизмы работают на частоте, отличной от установившейся промышленной (50 Гц). Поэтому используют принцип работы которого заключается в преобразовании частот и контролировании данной характеристики.
По поднятому пантографу напряжение подается в камеры, где находятся пусковые реостаты и контакторы. С помощью контроллеров реостаты подключаются к тяговым электродвигателям, которые расположены на осях тележек. От них ток поступает через шины на рельсы, а затем возвращается к тяговой подстанции, таким образом замыкая электрическую цепь.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Электродвигатели – это устройства, в которых электрическая энергия превращается в механическую. В основе принципа их действия лежит явление электромагнитной индукции.
Однако способы взаимодействия магнитных полей, заставляющих вращаться ротор двигателя, существенно различаются в зависимости от типа питающего напряжения – переменного или постоянного.
В основе принципа работы электродвигателя постоянного тока лежит эффект отталкивания одноименных полюсов постоянных магнитов и притягивания разноименных. Приоритет ее изобретения принадлежит русскому инженеру Б. С. Якоби. Первая промышленная модель двигателя постоянного тока была создана в 1838 году. С тех пор его конструкция не претерпела кардинальных изменений.
В двигателях постоянного тока небольшой мощности один из магнитов является физически существующим. Он закреплен непосредственно на корпусе машины. Второй создается в обмотке якоря после подключения к ней источника постоянного тока. Для этого используется специальное устройство – коллекторно-щеточный узел. Сам коллектор – это токопроводящее кольцо, закрепленное на валу двигателя. К нему подключены концы обмотки якоря.
Чтобы возник вращающий момент, необходимо непрерывно менять местами полюса постоянного магнита якоря. Происходить это должно в момент пересечения полюсом так называемой магнитной нейтрали. Конструктивно такая задача решается разделением кольца коллектора на секторы, разделенные диэлектрическими пластинами. Концы обмоток якоря присоединяются к ним поочередно.
Чтобы соединить коллектор с питающей сетью используются так называемые щетки – графитовые стержни, имеющие высокую электрическую проводимость и малый коэффициент трения скольжения.
Обмотки якоря не подключены к питающей сети, а посредством коллекторно-щеточного узла соединены с пусковым реостатом. Процесс включения такого двигателя состоит из соединения с питающей сетью и постепенного уменьшения до нуля активного сопротивления в цепи якоря. Электромотор включается плавно и без перегрузок.
Особенности использования асинхронных двигателей в однофазной цепи
Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Для этого на статоре должно быть две обмотки, одна из которой является «пусковой». Ток в ней сдвигается по фазе на 90° за счет включения в цепь реактивной нагрузки. Чаще всего для этого
Практически полная синхронность магнитных полей позволяет двигателю набирать обороты даже при значительных нагрузках на валу, что и требуется для работы дрелей, перфораторов, пылесосов, «болгарок» или полотерных машин.
Если в питающую цепь такого двигателя включен регулируемый , то частоту его вращения можно плавно менять. А вот направление, при питании от цепи переменного тока, изменить не удастся никогда.
Такие электромоторы способны развивать очень высокие обороты, компактны и имеют больший вращающий момент. Однако наличие коллекторно-щеточного узла снижает их моторесурс – графитовые щетки достаточно быстро истираются на высоких оборотах, особенно если коллектор имеет механические повреждения.
Электродвигатели имеют самый большой КПД (более 80 %) из всех устройств, созданных человеком. Их изобретение в конце XIX века вполне можно считать качественным цивилизационным скачком, ведь без них невозможно представить жизнь современного общества, основанного на высоких технологиях, а чего-либо более эффективного пока еще не придумано.
Синхронный принцип работы электродвигателя на видео
Электрический двигатель представляет собой особый преобразователь. Это машина, где электрическая энергия преобразуется и переходит в механическую. Принцип действия двигателя основан на электромагнитной индукции . Есть к тому же и электростатические двигатели. Можно без особых дополнений использовать двигатели на других принципах преобразования электричества в перемещении. Но немногие знают, как устроен и как работает электродвигатель.
Принцип работы устройства
В составе электродвигателя переменного тока присутствуют неподвижные и подвижные части. К первым относят:
- статор;
- индуктор.
Статор находит применение для машин синхронного и асинхронного типа . Индуктор эксплуатируется в машинах постоянного тока. Подвижная часть состоит из ротора и якоря. Первый применяют для синхронных и асинхронных устройств, тогда как якорь используется для оборудования с постоянными показателями. Функция индуктора лежит на двигателях небольшой мощности. Здесь нередко используют постоянные магниты.
Говоря о том, как устроен электродвигатель, необходимо определить, к какому классу оборудования относится конкретная модель. В конструкции асинхронного двигателя ротор бывает:
- короткозамкнутым;
- фазным, то есть с обмоткой.
Последний тип используется, если требуется уменьшить пусковой ток и отрегулировать частоту вращения асинхронного электродвигателя. Обычно речь идет о крановых электродвигателях, повсеместно используемых в крановых установках.
Кран обладает подвижностью и применяется в машинах постоянного тока. Это может быть генератор либо двигатель, а также универсальный двигатель, функционирующие по тому же принципу. Его используют в электроинструменте. Фактически универсальный двигатель — это тот же двигатель с постоянными показателями, в котором происходит последовательное возбуждение. Отличие касается лишь расчётов обмоток . Здесь отсутствует реактивное сопротивление. Оно бывает:
- емкостным;
- индуктивным.
Вот почему любой электроинструмент, если из него извлекается электронный блок, сможет работать и на постоянном токе. Но при этом напряжение в сети будет меньше. Принцип действия электродвигателя определяется сообразно тому, из каких компонентов он состоит и для каких целей предназначается.
Работа трехфазного асинхронного двигателя
Во время включения в сеть формируется вращающееся магнитное поле. Оно отмечается в статоре и проникает через короткозамкнутую обмотку ротора. В ней переходит в индукцию. После этого, в соответствии с законом Ампера, ротор начинает вращаться. Частота перемещения этого элемента зависит от частоты питающего напряжения и количества магнитных полюсов, представленных парами.
Разность между частотой вращения ротора и магнитного поля статора выражается в виде скольжения. Двигатель именуют асинхронным , потому что частота вращения магнитного поля у него сообразна с частотой вращения ротора. Синхронный двигатель имеет отличия в конструкции. Ротор дополняется магнитом постоянного типа либо электромагнитом. В нём имеются элементы, такие как для запуска беличья клетка и постоянные магниты. Также их роль могут выполнять электромагниты.
В асинхронном двигателе у магнитного поля статора частота вращения совпадает с аналогичным показателем у ротора. Для включения используют асинхронные электродвигатели вспомогательного типа либо ротор с короткозамкнутой обмоткой. Асинхронные двигатели смогли найти широкое применение во всех технических областях.
Особенно это актуально в отношении трехфазных двигателей, характеризующихся простотой конструкции. Они не только доступны по цене, но и надежнее в сравнении с электрическими. Ухода они не требуют почти никакого. Название асинхронный, присвоенное им, обусловлено несинхронным вращением ротора в таком двигателе. Если отсутствует трехфазная сеть, такой двигатель может включаться в сеть однофазного тока.
В составе статора асинхронного электродвигателя присутствует пакет. В нём имеются лакированные листы электротехнической стали, чья толщина составляет 0,5 мм. У них есть пазы, куда уложена обмотка. Три фазы обмотки соединены друг с другом треугольником или звездой, которые смещены на 120 градусов пространственно.
Если речь идет о роторе электродвигателя, в котором имеются контактные кольца в пазах, здесь отмечается ситуация, похожая на обмотку статора. Это актуально, если он включён звездой либо начальные концы фаз соединены тремя контактными кольцами, зафиксированными на валу. Когда двигатель запущен, можно подключить реостат на фазы обмотки для контроля частоты вращения. После успешного разбега контактные кольца коротко замыкаются, а потому обмотка ротора выполняет те же функции, что и в случае с короткозамкнутым изделием.
Современная классификация
По принципу формирования вращающего момента двигатели электрического типа делят на магнитоэлектрические и гистерезисные. Последняя группа отличается тем, что вращающий момент здесь формируется вследствие гистерезиса при чрезмерном намагничивании ротора. Такие двигатели не считаются классическими и не так распространены в промышленности. Наибольшее распространение получили магнитоэлектрические модификации, которые делятся на две большие группы, согласно потребляемой энергии. Это двигатели переменного и постоянного тока. Выпускаются также универсальные модели, которые способны питаться обоими видами электрического тока.
Основные особенности
Было бы правильно называть эти устройства электрическими нефазными. Это обусловлено тем, что фазы переключаются здесь непосредственно в двигателе . За счет этого мотор питается постоянным, как и переменным типами тока, с одинаковым успехом. Эта группа делится по способу переключения фаз и присутствию обратной связи. Они бывают вентильными и коллекторными.
Что касается типа возбуждения, коллекторные двигатели подразделяют на модели с самовозбуждением, моторы с независимым возбуждением от постоянных магнитов и электромагнитов. Первый тип, в свою очередь, классифицируется на моторы с последовательным, параллельным, смешанным возбуждением.
Бесколлекторные, или вентильные изделия, работают от электричества. В них переключение фаз происходит посредством специального электроблока, носящего название инвертора. Процесс этот может оснащаться обратной связью, когда пускают в ход датчик положения ротора либо без обратной связи. Такое устройство можно фактически позиционировать, как аналог асинхронного устройства.
Агрегаты пульсирующего тока
Такой двигатель является электрическим, и питание у него осуществляется пульсирующим электротоком. Конструкционные особенности его схожи с аналогичными особенностями у устройств постоянного тока. Конструктивные отличия его от двигателя с постоянными показателями состоят в присутствии шихтованных вставок для выпрямления переменного тока. Используют его на электровозах со специальными установками. Характерной особенностью является наличие компенсационной обмотки и значительного количества пар полюсов.
Модификации переменного тока
Двигатель представляет собой устройство, питание которого происходит с переменным током. Агрегаты эти бывают асинхронными и синхронными. Различие состоит в том, что в асинхронных машинах магнитодвижущая сила статора перемещается со скоростью вращения ротора. У асинхронного оборудования всегда наблюдается разница между скоростью вращения магнитного поля и ротора.
Синхронный электродвигатель работает от переменного тока. Ротор здесь вращается сообразно движению магнитного поля питающего напряжения. Синхронные электродвигатели делятся на модификации с обмотками возбуждения, с постоянными магнитами, а также на реактивные модификации, гистерезисные, шаговые, гибридные реактивные типы устройств.
Выделяют и так называемый реактивно-гистерезисный тип. Выпускают также модели с шаговыми агрегатами. Здесь определённое положение ротора фиксируется подачей питания на определенные зоны обмотки. Переход в другое положение достигается посредством снятия напряжения с одних обмоток и перемещения его в другие области. Вентильные реактивные модели электрического типа формируют питание обмоток посредством полупроводниковых элементов . Асинхронное устройство имеет частоту вращения ротора, отличную от частоты вращающегося магнитного поля. Она создается питающим напряжением. Такие модели получили на сегодня наибольшее распространение.
Универсальное коллекторное оборудование
Такой агрегат может работать на переменном и постоянном токе. Изготавливают его с последовательной обмоткой возбуждения при показателях мощности до 200 Вт. Статор выполняется из особой электротехнической стали. Обмотка возбуждения осуществляется при постоянном показателе напряжения полностью и частично при переменном показателе. Номинальное напряжение для переменного электротока составляют 127 и 220 В, аналогичные показатели для постоянного параметра равны 110 и 220 В. Находят применение в электроинструментах и бытовых аппаратах.
То, как работает электродвигатель, зависит от его принадлежности к тому или иному типу оборудования. Модификации переменного тока с питанием от промышленной сети 50 Гц не дают получить частоту вращения больше 3000 оборотов в минуту. Вот почему для получения значительных частот используют коллекторный мотор электрического типа. Он к тому же легче и меньше по размерам, нежели устройства с переменными показателями с аналогичной мощностью.
В их отношении используют специальные передаточные механизмы, преобразующие кинематические параметры механизма до приемлемых. При использовании преобразователей частоты и при наличии сети повышенной частоты двигатели переменного тока легче и меньше коллекторных изделий.
Ресурс асинхронных моделей с переменными показателями значительно выше, нежели у коллекторных. Определяется он состоянием подшипников и особенностями обмоточной изоляции.
Синхронный двигатель, у которого есть датчик положения ротора и инвертор, считается электронным аналогом коллекторного двигателя постоянного тока. Фактически он является коллекторным электродвигателем с последовательно включенными обмотками статора. Они идеально оптимизированы для работы с бытовой электросетью. Такую модель, независимо от полярности напряжения, можно вращать в одну сторону, так как последовательное соединение обмоток и ротора гарантирует смену полюсов из магнитных полей. Соответственно, результат остается направленным в одну сторону.
Статор из магнитного мягкого материала применим для работы на переменном токе. Это возможно, если сопротивление в перемагничивании у него незначительное. Чтобы снизить потери на вихревые токи, статор делают из изолированных пластин. Он получается наборным. Его особенностью является то, что потребляемый ток ограничивается за счёт индуктивного сопротивления обмоток. Соответственно, момент двигателя оценочно становится максимальным и варьируется от 3 до 5. Чтобы приблизить к механическим характеристикам двигатели общего назначения, применяются секционные обмотки. Они имеют отдельные выводы.
Примечательно, что для передвижения некоторыми видами бактерий используется электродвигатель из нескольких белковых молекул. Он способен трансформировать энергию электрического тока в форме движения протонов во вращении жгутика.
Синхронная модель возвратно-поступательного движения работает таким образом, что подвижная часть устройства оснащена постоянными магнитами. Они зафиксированы на шторке. Посредством неподвижных элементов постоянные магниты находятся под воздействием магнитного поля и проводят перемещение штока возвратно-поступательным методом.
Двигатель постоянного тока асинхронный или синхронный. Типы электродвигателей и принципы работы
Электродвигатель переменного тока
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу)
Электрический двигатель — это, электрическая машина , в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
Классификация электродвигателей
- Двигатель постоянного тока постоянным током ;
- Коллекторные двигатели постоянного тока. Разновидности:
- Бесколлекторные двигатели постоянного тока (вентильные двигатели) с электронным переключателем тока;
- Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током , имеет две разновидности:
- Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения;
- Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением.
- Однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь
- Многофазные
- Шаговые двигатели — Электродвигатели, которые имеют конечное число положений ротора. Заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие.
- Вентильные двигатели — Электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора (ДПР), системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора).
- Универсальный коллекторный двигатель (УКД) — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе.
Из-за связи с низкой частотой сети (50 Герц) асинхронные и синхронные двигатели имеют больший вес и размеры, чем коллекторный двигатель постоянного тока и универсальный коллекторный двигатель той же мощности. При применении выпрямителя и инвертора с частотой значительно большей 50 Гц вес и размеры асинхронных и синхронных двигателей приближаются к весу и размерам коллекторного двигателя постоянного тока и универсального коллекторного двигателя той же мощности.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
История.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлова. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Ссылки
Wikimedia Foundation . 2010 .
Смотреть что такое «Электродвигатель переменного тока» в других словарях:
электродвигатель переменного тока — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN ас motor …
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, ма … Википедия
Машина переменного тока, предназначенная для работы в режиме двигателя (см. Переменного тока машина). П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели (См. Синхронный электродвигатель) применяют в… …
Электрическая машина, применяемая для получения переменного тока (генератор) или для преобразования электрической энергии в механическую (двигатель) либо в электрическую энергию другого напряжения или частоты (преобразователь) П. т. м.… … Большая советская энциклопедия
Машина перем. тока, предназнач. для работы в режиме двигателя. П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели применяют в электроприводах в осн. тогда, когда требуется постоянство угловой скорости. Из асинхронных… … Большой энциклопедический политехнический словарь
электропривод переменного тока — электропривод постоянного [переменного] тока Электропривод, содержащий электродвигатель постоянного [переменного] тока. [ГОСТ Р 50369 92] Тематики электропривод EN ac drivealternating current drive DE Wechselstromantrieb … Справочник технического переводчика
электропривод постоянного (переменного) тока — 3.1.3 электропривод постоянного (переменного) тока: Привод, содержащий электродвигатель постоянного (переменного) тока и редуктор;
Явление электромагнитной индукции стало основой возникновения и развития всех электрических машин. Первооткрывателем этого явления в конце 19 века был Майкл Фарадей, английский учёный — экспериментатор. Он провёл опыты с первыми электрическими машинами. Сейчас без них невозможно представить нашу жизнь. Электродвигатели стали одними из самых распространённых электрических машин.
Для работы электромотора необходимо напряжение, свойства которого определяют его конструкцию. На переменном напряжении и токе работают такие электродвигатели:
на постоянном напряжении и токе работают:
- коллекторные;
- униполярные;
- шаговые.
Синхронные и асинхронные электродвигатели
Синхронные и асинхронные электромоторы имеют общие условия для своей работы. Для этого необходимо магнитное поле, максимальная величина которого перемещается в пространстве. Такое поле может быть создано двумя или большим числом обмоток. Обычные конструкции синхронных и асинхронных электромоторов содержат две или три обмотки.
Они размещаются на массивных ферримагнитных сердечниках, усиливающих магнитное поле. Для трёх обмоток применяется трёхфазное напряжение, для двух обмоток – двухфазное или одна фаза с фазосдвигающим конденсатором. Но с таким конденсатором к однофазной сети можно подключить и трёхфазные двигатели.
Если ротор электромотора создаёт постоянное магнитное поле, либо от постоянных магнитов, либо от встроенного в ротор источника питания постоянного тока, либо от внешнего источника питания постоянного тока через кольца со щётками такой двигатель является синхронным. В нём частота оборотов и частота напряжения источника питания одинаковы. В асинхронных двигателях используется немагнитный ротор без явно выраженных полюсов, колец со щётками, встроенных выпрямителей и комбинированных деталей из различных материалов. Исключением является синхронный гистерезисный двигатель.
Ротор асинхронного двигателя работает как вторичная обмотка трансформатора, которая замкнута накоротко. Но ток в его роторе может возникнуть только при более медленном вращении в сравнении с магнитным полем статора. Такое различие скоростей называется скольжением. Простота конструкции и соответствующая надёжность делают асинхронный электромотор наиболее широко используемым.
Коллекторные машины
Однако у синхронных и асинхронных электромоторов есть один непреодолимый недостаток – частота питающего напряжения. Она определяет скорость вращения магнитного поля и вала в этих двигателях. Никакими конструктивными изменениями в них при заданной частоте питающего напряжения невозможно получить частоту вращения вала большую, чем частота питающего напряжения. При необходимости большего числа оборотов используются коллекторные электромоторы.
В этих двигателях происходит постоянное переключение обмоток ротора коллектором. Каждая обмотка по сути это рамка с током, которая, как известно из опытов Фарадея, поворачивается в магнитном поле. Но одна рамка повернётся и остановится. Поэтому рамок — обмоток сделано несколько и каждой из них соответствует пара пластин в коллекторе. Ток подаётся через щётки, скользящие по коллектору.
Конструкция такого электромотора позволяет работать от источника либо постоянного, либо переменного напряжения, который обеспечивает ток и в статоре и в роторе. При переменном напряжении направление тока в статоре и роторе изменяется одновременно и поэтому направление действия силы вращающей ротор сохраняется. Частота питающего напряжения никак не влияет на частоту вращения ротора. Она зависит только от величины напряжения, питающего электромотор. Скользящий контакт щётки с коллектором ограничивает возможности этих электродвигателей по сроку службы и месту применения, поскольку искрение в щётках довольно быстро разрушает скользящий контакт и недопустимо в условиях повышенной взрывоопасности.
Униполярные и шаговые варианты
Однако есть такие конструкции электромоторов постоянного тока, в которых коллектора нет. Это униполярные электромоторы.
В этих электродвигателях ротор выполнен в виде диска, расположенного между полюсами постоянных магнитов. Щётки расположенные диаметрально противоположно питают током диск – ротор. Под воздействием силы Лоренца диск вращается. Несмотря на привлекательную простоту конструкции, такой электромотор не имеет широкого практического использования, поскольку требует слишком больших значений тока и магнитного поля. Тем не менее, существуют уникальные лабораторные разработки униполярных электромоторов со щётками из жидкого металла, которые развивают обороты немыслимые для иных конструкций двигателей.
Шаговый двигатель это ещё одна конструкция, работающая на постоянном токе.
В целом этот двигатель подобен синхронному электромотору с ротором из постоянных магнитов. Отличие в том, что число обмоток здесь больше, и они управляются ключами, которые подают на каждую обмотку питающее напряжение. В результате ротор меняет своё положение, притягиваясь к подключенной обмотке. Число обмоток определяет минимальный угол поворота ротора, а коммутаторы – скорость вращения ротора. В шаговом двигателе ротор может вращаться почти как угодно, поскольку ключи связаны с электронной схемой управления.
Рассмотренные конструкции электромоторов являются базовыми. На их основе для решения определённых задач создано много специальных разновидностей электромоторов. Но это уже совсем другая история…
В быту, коммунальном хозяйстве, на любом производстве двигатели электрические являются неотъемлемой составляющей: насосы, кондиционеры, вентиляторы и пр. Поэтому важно знать типы наиболее часто встречающихся электродвигателей.
Электродвигатель является машиной, которая преобразует в механическую энергию электрическую. При этом выделяется тепло, являющееся побочным эффектом.
Видео: Классфикация электродвигателей
Все электродвигатели разделить можно на две большие группы:
- Электродвигатели постоянного тока
- Электродвигатели переменного тока.
Электродвигатели, питание которых осуществляется переменным током, называются двигателями переменного тока, которые имеют две разновидности:
- Синхронные – это те, у которых ротор и магнитное поле питающего напряжения вращаются синхронно.
- Асинхронные . У них отличается частота вращения ротора от частоты, создаваемого питающим напряжением магнитного поля. Бывают они многофазными, а также одно-, двух- и трехфазными.
- Электродвигатели шаговые отличаются тем, что имеют конечное число положений ротора. Фиксирование заданного положения ротора происходит за счет подачи питания на определенную обмотку. Путем снятия напряжения с одной обмотки и передачи его на другую осуществляется переход в другое положение.
К электродвигателям постоянного тока относят те, которые питаются постоянным током. Они, в зависимости от того, имею или нет щёточно-коллекторный узел, подразделяются на:
Коллекторные также, в зависимости от типа возбуждения, бывают нескольких видов:
- С возбуждением постоянными магнитами.
- С параллельным соединением обмоток соединения и якоря.
- С последовательным соединением якоря и обмоток.
- Со смешанным их соединением.
Электродвигатель постоянного тока в разрезе. Коллектор со щетками – справа
Какие электродвигатели входят в группу «электродвигатели постоянного тока»
Как уже говорилось, электродвигатели постоянного тока составляют группу, в которую входят коллекторные электродвигатели и бесколлекторные, которые выполнены в виде замкнутой системы, включающей датчик положения ротора, систему управления и силовой полупроводниковый преобразователь. Принцип работы бесколлекторных электродвигателей аналогичен принципу работы двигателей асинхронных. Устанавливают их в бытовых прибора, например, вентиляторах.
Что собой представляет коллекторный электродвигатель
Длина электродвигателя постоянного тока зависит от класса. Например, если речь идет о двигателе 400 класса, то его длина составит 40 мм. Отличием коллекторных электродвигателей от бесколлектрных собратьев является простота в изготовлении и эксплуатации, следовательно, и стоимость его будет более низкой. Их особенность — наличие щеточно-коллекторного узла, при помощи которого осуществляется соединение цепи ротора с расположенными в неподвижной части мотора цепями. Состоит он из расположенных на роторе контактов – коллектора и прижатых к нему щеток, расположенных вне ротора.
Ротор
Используют эти электродвигатели в радиоуправляемых игрушках: подав на контакты такого двигателя напряжение от источника постоянного тока (той же батарейки), вал приводится в движение. А, чтобы изменить его направление вращения, достаточно изменить полярность, подаваемого напряжения питания. Небольшой вес и размеры, низкая цена и возможность восстановления щеточно-коллекторного механизма делают эти электродвигатели наиболее используемыми в бюджетных моделях, несмотря на то, что он значительно уступает по надежности бесколлекторному, поскольку не исключено искрение, т.е. чрезмерный нагрев подвижных контактов и их быстрый износ при попадании пыли, грязи или влаги.
На коллекторный электродвигатель нанесена, как правило, маркировка, указывающая на число оборотов: чем оно меньше, тем скорость вращения вала больше. Она, к слову, очень плавно регулируется. Но, существуют и двигатели этого типа высокооборотистые, не уступающие бесколлекторным.
Преимущества и недостатки бесколлекторных электродвигателей
В отличие от описанных, у этих электродвигателей подвижной частью является статор с постоянным магнитом (корпус), а ротор с трехфазной обмоткой – неподвижен.
К недостаткам этих двигателей постоянного тока отнести можно менее плавную регулировку скорости вращения вала, но зато они способны за доли секунды набрать максимальные обороты.
Бесколлекторный электродвигатель помещен в закрытый корпус, поэтому он более надежен при неблагоприятных условиях эксплуатации, т.е. ему не страшны пыль и влага. К тому же, его надежность возрастает благодаря отсутствию щеток, как и скорость, с которой вращается вал. При этом, по конструкции мотор более сложен, следовательно, не может быть дешевым. Стоимость его в сравнении с коллекторным, выше в два раза.
Таким образом, коллекторный электродвигатель, работающий на переменном и на постоянном токе, является универсальным, надежным, но более дорогим. Он и легче, и меньше по размерам двигателя переменного тока той же мощности.
Поскольку электродвигатели переменного тока, питающиеся от 50 Гц (питание промышленной сети) не позволяют получать высокие частоты (выше 3000 об/мин), при такой необходимости, используют коллекторный двигатель.
Между тем, его ресурс ниже, чем у асинхронных электродвигателей переменного тока, который зависит от состояния подшипников и изоляции обмоток.
Как работает синхронный электродвигатель
Синхронные машины применяют часто в качестве генераторов. Он синхронно работают с частотой сети, поэтому он с датчиком положения инвертора и ротора, является электронным аналогом коллекторного электродвигателя постоянного тока.
Строение синхронного электродвигателя
Свойства
Эти двигатели не являются механизмами самозапускающимися, а требуют внешнего воздействия для того, чтобы набрать скорость. Применение они нашли в компрессорах, насосах, прокатных станках и подобном оборудовании, рабочая скорость которого не превышает отметки пятьсот оборотов в минуту, но требуется увеличение мощности. Они достаточно большие по габаритам, имеют «приличный» вес и высокую цену.
Запустить синхронный электродвигатель можно несколькими способами:
- Используя внешний источник тока.
- Пуск асинхронный.
В первом случае, с помощью мотора вспомогательного, в качестве которого выступать может электродвигатель постоянного тока или индукционный трехфазный мотор. Изначально ток постоянный на мотор не подается. Он начинает вращаться, достигая близкой к синхронной скорости. В этот момент подается постоянный ток. После замыкания магнитного поля, разрывается связь с вспомогательным двигателем.
Во втором варианте необходима установка в полюсные наконечники ротора дополнительной короткозамкнутой обмотки, пересекая которую магнитное вращающееся поле индуцирует токи в ней. Они, взаимодействуя с полем статора, вращают ротор. Пока он не достигнет синхронной скорости. С этого момента крутящий момент и ЭДС уменьшаются, магнитное поле замыкается, сводя к нулю крутящий момент.
Эти электродвигатели менее чувствительны, чем асинхронные, к колебаниям напряжения, отличаются высокой перегрузочной способностью, сохраняют неизменной скорость при любых нагрузках на валу.
Однофазный электродвигатель: устройство и принцип работы
Использующий после пуска только одну обмотку статора (фазу) и не нуждающийся в частном преобразователе электродвигатель, работающий от электросети однофазного переменного тока, является асинхронным или однофазовым.
Однофазовый электродвигатель имеет вращающуюся часть – ротор и неподвижную – статор, который и создает магнитное поле, необходимое для вращения ротора.
Из двух, расположенных в сердечнике статора друг к другу под углом 90 градусов обмоток, рабочая занимает 2/3 пазов. Другая обмотка, на долю которой приходится 1/3 пазов, называется пусковой (вспомогательной).
Ротор – это тоже короткозамкнутая обмотка. Его стержни из алюминия или меди замкнуты с торцов кольцом, а пространство между ними залито алюминиевым сплавом. Может быть выполнен ротор в виде полого ферромагнитного или немагнитного цилиндра.
Однофазный электродвигатель, мощность которого может быть от десятков ватт до десятка киловатт, применяются в бытовых приборах, устанавливаются в деревообрабатывающих станках, на транспортерах, в компрессорах и насосах. Преимущество их – возможность использования в помещениях, где нет трехфазной сети. По конструкции они не сильно отличаются от электродвигателей асинхронных трехфазного тока.
Для того чтобы понять принцип работы электродвигателя переменного тока, поместим изогнутый проводник в равномерном магнитном поле, создаваемом полюсами магнита.
Разница между генераторами переменного и постоянного тока заключается в отсутствии коллектора.
Асинхронные трехфазные электродвигатели являются прямыми энергетическими потребителями трехфазного тока. Такие модели применяются во многих отраслях производства.
На рисунке 2 изображена схема электродвигателя переменного тока. Синхронный генератор имеет такой же статор рис. 1. Питание обмотки статора переменным током происходит от трехфазной сети.
Изменение тока в фазах будет происходить также в фазах генератора. На рис. 2 ротор представлен как цилиндр с пазами, который установлен на медные либо алюминиевые стержни, связанные между собой кольцами на поверхностях ротора с торца.
Ток проходит в замкнутых проводниках. Вращение ротора асинхронного устройства различно от частоты магнитного поля.
Рис. 1 Принцип работы генератора переменного тока.
При одинаковом вращении проводники роторной обмотки перестают пересекать магнитное поле, и тогда исчезает вращающий момент. Потому электродвигатель переменного тока и получил название асинхронного (т.е. несинхронного). Круговое вращающее магнитное поле условно представляют полем полюсов постоянных магнитов, которые вращаются с частотой . Помещая в поле статора асинхронного трехфазного прибора ротор, у которого короткозамкнута обмотка (рис. 3), вращающееся поле статора проходит через проводники обмотки ротора и направляет них э.д.с . Направление э.д.с обусловливаться правилом правой руки. Когда обмотка ротора замкнута, то в ее проводниках появляются токи . Ток любого проводника ротора, взаимодействуя с полем статора, формирует электромагнитную силу , течение которой обусловливается правилом левой руки.
Группа электромагнитных сил формирует электромагнитный момент , который приводит ротор в обращение с частотой в направлении поля вращения. Электрическая энергия, которая поступает в обмотку статора из сети, реорганизуется в механическую энергию верчения ротора.
Рис. 2 Трехфазный асинхронный двигатель
Рис. 3 Схема однофазного электродвигателя
Частота верчения электродвигателя переменного тока всегда меньше частоты верчения поля статора , от чего и его название — асинхронный. Когда ротор АД вращается с частотой , тогда проводники обмотки ротора не пересекают поле статора. Следовательно, в них не наводятся э.д.с, не возникают токи, не создается вращающий момент.
Отличие между частотами вращения ротора и поля статора имеет название частота скольжения . На практике чаще используется понятие скольжения — отношение частоты вращения поля статора к частоте скольжения:
Между частотой вращения ротора и скольжением также имеется связь:
Когда работает АД, частота вращения ротора изменяется от при пуске двигателя до на идеальном холостом ходу. Следовательно, двигательному режиму работы асинхронной машины отвечает широта изменений скольжения от 1 до 0. Частота верчения ротора, а следовательно и скольжение находятся в зависимости от нагрузки на валу (внешнего момента сопротивления ). При увеличении нагрузки уменьшается частота вращения ротора, а скольжение возрастает. В асинхронных приборах общего применения начальное скольжение составляет , т.е. при начальной нагрузке ротор АД крутится с частотой, которая близка к частоте вращения поля. Частота э.д.с и токов, наводимых в проводах ротора, определяется частотой скольжения. Учитывая, что определим .
Постоянное переключение батареи равносильно питанию оборудования переменным током. Разница лишь в том, что у такого переменного тока низкая частота, так как за секунду можно 3-5 раз перевернуть батарейку, а у переменного тока направление изменяется 100 раз в секунду.
Если от понижающего трансформатора присоединить два проводника к зажимам прибора с одинаковым с батареей напряжением, то устройство электродвигателя переменного тока будет работать. Однако якорь его будет крутиться несколько медленнее, чем, если бы было питание постоянным током. При переменном токе появляется индуктивное сопротивление обмоток электродвигателя. Прикоснувшись рукой спустя 10-15 мин к его корпусу, можно заметить, что он нагрелся.
А при работе от батареи этого не происходит. При питании переменным током в стенках корпуса и в полюсах появляются потери от перемагничивания переменным потоком и вихревых токов. Для снижения этих потерь, корпус и полюсы однофазной коллекторной модели переменного тока собираются из штампованных листов электротехнической стали, которые изолированы пленкой лака один от другого и скреплены заклепками (рис. 4).
Рис. 4 Статор коллекторного электродвигателя
1 — Катушка; 2 — наконечник полюса; 3 — заклепка.
Коллекторные электродвигатели переменного тока работают только с последовательным возбуждением, и благодаря катушке параллельного возбуждения имели бы огромное индуктивное сопротивление при переменном токе.
Механические качества однофазного устройства подобны качествам двигателя постоянного тока с последовательным возбуждением. Вследствие этого они применяются тогда, когда от прибора требуется большая пусковая и высокая перегрузочная способность.
Применение коллекторных электродвигателей рассчитано на любую частоту вращения, тогда как у асинхронных, питающихся переменным током частотой 50 Гц, имеется максимальная синхронная частота вращения 3000 об/мин. Этот признак делает незаменимыми коллекторные модели для бытовых приборов, в частности для пылесосов. Коллекторные устройства легче асинхронных однофазовых в 2-3 раза.
Такие электродвигатели изготавливаются для низкого напряжения и питаются они от понижающего трансформатора и для напряжения сети 127 или 220 В. Для снижения опасности поражения электрическим током эти приборы используют в движущихся игрушках (электрические железные дороги, подъемные краны).
Электрические двигатели, питаемые от сети переменного тока, используются в пылесосах, швейных машинках, электробритвах и других электробытовых приборах.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
Электродвигатели постоянного тока
Используются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.Электродвигатели переменного тока
Пользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.Шаговые электродвигатели
Действуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.Серводвигатели
Относятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.Линейные электродвигатели
Обладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.Синхронные двигатели
Являются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.Асинхронные двигатели
Также, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Типы электродвигателей
Электродвигатели теперь более разнообразны и адаптируемы, чем когда-либо прежде. При планировании системы управления движением чрезвычайно важен выбор двигателя. Двигатель должен соответствовать назначению и общим рабочим характеристикам системы. К счастью, существует конструкция двигателя, подходящая для любых мыслимых целей.
К наиболее распространенным электродвигателям, используемым сегодня, относятся:
Бесщеточные двигатели переменного тока
Бесщеточные двигатели переменного токаявляются одними из самых популярных в управлении движением.Они используют индукцию вращающегося магнитного поля, генерируемого в статоре, для вращения как статора, так и ротора с синхронной скоростью. Для работы они полагаются на постоянные электромагниты.
Щеточные двигатели постоянного тока
В щеточном двигателе постоянного тока ориентация щетки на статоре определяет ток. В некоторых моделях решающее значение имеет ориентация щетки относительно сегментов стержня ротора. Коммутатор особенно важен в любой конструкции щеточного двигателя постоянного тока.
Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного токабыли впервые разработаны для достижения более высоких характеристик в меньшем пространстве, чем щеточные двигатели постоянного тока, и они меньше, чем сопоставимые модели переменного тока.Встроенный контроллер используется для облегчения работы при отсутствии контактного кольца или коммутатора.
Прямой привод
Прямой привод — это высокоэффективная технология с низким уровнем износа, которая заменяет обычные серводвигатели и сопутствующие им трансмиссии. Эти двигатели не только намного легче обслуживать в течение длительного периода времени, но и ускоряются быстрее.
Линейные двигатели
Эти электродвигатели имеют раскрученный статор и двигатель, создающий линейную силу по длине устройства.В отличие от цилиндрических моделей, они имеют плоскую активную секцию с двумя торцами. Как правило, они быстрее и точнее вращающихся двигателей.
Серводвигатели
Серводвигатель — это любой двигатель, соединенный с датчиком обратной связи для облегчения позиционирования; Таким образом, серводвигатели являются основой робототехники. Используются как поворотные, так и линейные приводы. Недорогие щеточные двигатели постоянного тока широко распространены, но их заменяют бесщеточные двигатели переменного тока для высокопроизводительных приложений.
Шаговые двигатели
В шаговых двигателяхиспользуется внутренний ротор, управляемый электроникой с помощью внешних магнитов.Ротор может быть выполнен на постоянных магнитах или из мягкого металла. Когда обмотки находятся под напряжением, зубья ротора выравниваются по магнитному полю. Это позволяет им перемещаться от точки к точке с фиксированным шагом.
Перед тем, как начать работу над какой-либо новой системой, тщательно подумайте о конкурирующих свойствах различных двигателей. Выбор правильного двигателя позволяет лучше начать любой проект.
Готовы узнать больше? Ознакомьтесь с курсом «Основы проектирования электродвигателей», предлагаемым колледжем MCMA Motion & Motor College.
Типы электродвигателей и их использование
Знание о различных типах электродвигателей всегда полезно благодаря широкому распространению двигателей от бытовых до промышленных. Если у вас есть система кондиционирования воздуха дома или вы используете воздушный компрессор на промышленном предприятии, вы используете электродвигатели. Следовательно, если вы знаете о различных типах электродвигателей, вы сможете лучше понять систему, которой владеете, и лучше контролировать ее работу.
Здесь, в Linquip, мы предоставили вам удобную платформу, чтобы вы могли найти тип электродвигателя, который вам нужен для вашего применения. Кроме того, в этом посте мы пытаемся демистифицировать различные типы электродвигателей для вашей справки. Итак, следите за обновлениями!
Что такое электродвигатели?
Прежде чем узнать о различных типах электродвигателей, лучше начать с вопроса «что такое электродвигатель»? Что ж, самый короткий ответ заключается в том, что электродвигатель или просто двигатель — это электромеханическое устройство, которое получает электрическую энергию и преобразует ее в движение или механическую энергию.
Изображение из проекта по повышению осведомленности о стандартах устройств.Это движение в основном имеет вращательную форму. Поток электрического тока индуцирует магнитное поле, и в электродвигателе возникает вращательное движение, перпендикулярное направлению тока и магнитного поля.
Применение электродвигателей
Электродвигатели могут использоваться в домашних условиях, например, в таких электроприборах, как кондиционеры, пылесосы, вентиляторы, кухонные комбайны и т. Д.все они по-своему используют вращательную силу электродвигателей или даже в игрушках, таких как игрушечные машинки или модели самолетов с дистанционным управлением или с помощью приложений.
Говоря об электрических моделях транспортных средств, более крупные и сложные версии электродвигателей можно найти в электромобилях и самолетах реальных размеров (ну, эти самолеты все еще изучаются, чтобы стать коммерчески доступными).
И последнее, но не менее важное: некоторые типы электродвигателей широко используются в промышленности, например, в промышленных газовых компрессорах, насосах, подъемных транспортных средствах, смесителях и т. Д.
Способы классификации электродвигателей
Различные типы электродвигателей можно классифицировать по-разному. Один из способов классификации основан на их вольерах. У нас есть двигатели Open Drip Proof (ODP), подходящие для чистых, сухих и закрытых помещений, усовершенствованной версией которых являются двигатели с защитой от атмосферных воздействий с конфигурацией корпуса WP1 или WP2. У нас также есть полностью закрытые корпуса с вентиляторным охлаждением (TEFC), полностью закрытые воздушные клапаны (TEAO), полностью закрытые с принудительной вентиляцией (TEFV) и полностью закрытые невентилируемые корпуса (TENV) для различных типов электродвигателей.Существуют также взрывозащищенные (Ex) двигатели, которые используются во взрывоопасных зонах с возможностью взрыва из-за присутствия в этой зоне некоторых взрывоопасных жидкостей, пыли и т. Д.
Тем не менее, электродвигатели обычно классифицируют по источнику питания. Существуют двигатели переменного тока или двигатели переменного тока, в которых ток меняет направление с некоторой частотой. Существуют также двигатели постоянного или постоянного тока, которые широко используются в небольших приложениях из-за их легкого регулирования скорости.
Двигатели переменного тока подразделяются на однофазные и трехфазные.Однофазный двигатель может достигать мощности около 3 кВт при питании от однофазного источника питания, что характерно для бытовых и коммерческих приложений. С другой стороны, трехфазный двигатель может производить мощность до 300 кВт. Эти двигатели — идеальный выбор для промышленного применения.
Двигатели переменного тока
Как упоминалось ранее, двигатель переменного тока является одним из типов электродвигателей, в которых используется ток переменного направления. Эти двигатели не так легко регулируются по скорости, как двигатели постоянного тока; однако, с небольшими потерями в мощности, можно использовать двигатели переменного тока с частотно-регулируемыми приводами, чтобы лучше регулировать скорость.
Существует два широко используемых типа двигателей переменного тока и еще один менее распространенный тип:
- Асинхронные двигатели
Асинхронный двигатель — это механизм, который никогда не работает с синхронной скоростью. Этот двигатель преобразует электрическую энергию в механическую, используя явление электромагнитной индукции. В этих типах электродвигателей магнитное поле вращается в статорах, которые индуцируют ток в роторе, что приводит к вращению двигателя.Поскольку вращение ротора вызывается внешним магнитным полем, эти двигатели возбуждаются извне. Существует два типа асинхронных двигателей в зависимости от конструкции ротора: асинхронные двигатели с короткозамкнутым ротором и асинхронные двигатели с фазной обмоткой.
В синхронных типах электродвигателей происходит прямое приложение магнитного поля к обмоткам ротора, что имеет свои недостатки и преимущества. Такие двигатели с внутренним возбуждением требуют иных требований к защите и управлению, чем асинхронные двигатели.
Существуют также линейные типы электродвигателей, в которых статор и ротор не катятся, и поэтому они создают линейную силу вместо крутящего момента. Этот тип двигателя обычно используется в раздвижных дверях и приводах.
Асинхронный двигатель
Асинхронный двигатель является одним из типов электродвигателей Elector, которые, вероятно, наиболее широко используются в промышленности. Статор намагничивается из-за его подключения к электросети, затем магнитное поле индуцирует напряжение и, следовательно, ток в обмотках ротора, затем индуцированный ток в роторе создает другое магнитное поле, а затем взаимодействие между этими двумя магнитными полями. создает вращающую силу или крутящий момент, приводящий в движение вал двигателя.
Эти двигатели имеют очень простую конструкцию, прочную конструкцию, низкую цену и простоту обслуживания. Они также имеют широкий диапазон номинальной мощности, как уже было сказано, наиболее широко используемые типы электродвигателей. Тем не менее, регулирование скорости непросто без частотно-регулируемого привода, который заставляет двигатель работать с запаздывающим коэффициентом мощности.
Асинхронный двигатель выпускается двух разных типов: с короткозамкнутым ротором, , асинхронный двигатель с фазным ротором, , асинхронный двигатель с фазным ротором, , как упоминалось ранее.Каждый из этих двигателей также может быть однофазным или трехфазным. Однофазные асинхронные двигатели — менее распространенный тип асинхронных двигателей в промышленности. Сообщается, что трехфазный асинхронный двигатель является одним из типов электродвигателей, которые присвоили себе около 70% доли рынка промышленных асинхронных двигателей.
Двигатель с фазным ротором или электродвигатель с контактным кольцом имеет больше витков обмотки, что означает, что он имеет более высокое наведенное напряжение и снижает ток, чем асинхронный электродвигатель с короткозамкнутым ротором.Они также могли производить больший пусковой крутящий момент. С другой стороны, их сложнее производить из-за добавленного количества компонентов по сравнению с асинхронными двигателями с короткозамкнутым ротором, что значительно увеличивает их удельную стоимость, а также затраты на их обслуживание.
- Ротор с короткозамкнутым ротором Асинхронный двигатель состоит из параллельно расположенных токопроводящих стержней, закороченных на обоих концах закорачивающими кольцами.
- Однофазные асинхронные двигатели с короткозамкнутым ротором имеют одну обмотку статора, и всегда есть какое-то другое устройство, запускающее двигатель.Они идеально подходят для приложений, требующих всего несколько лошадиных сил, например, для бытовой техники. До сих пор они были наиболее широко используемыми для бытовой техники.
- Трехфазные асинхронные двигатели с короткозамкнутым ротором могут работать с высокими требованиями к мощности; их номинальная мощность может варьироваться от очень небольшой до сотен лошадиных сил. Они тоже самозапускаются. Почти 90% трехфазных асинхронных двигателей, используемых в промышленности, таких как насосы, компрессоры и вентиляторы, относятся к типу с короткозамкнутым ротором.
- Ротор Асинхронный двигатель имеет распределенную обмотку, состоящую из двух слоев. Причина названия в том, что ротор этих типов электродвигателей намотан на столько же полюсов, сколько и статор. Из-за более высокой стоимости двигатели с фазным ротором рассматриваются в ситуациях, когда требуется высокий пусковой момент.
- Однофазные двигатели с фазным ротором подходят для более высоких номинальных мощностей, чем их аналоги с короткозамкнутым ротором.Они могут довольно комфортно стартовать и могут очень хорошо разгоняться. Некоторые машины, превышающие размеры бытовой техники, могут использовать эти типы электродвигателей, например, в сельском хозяйстве, небольших воздушных компрессорах, горнодобывающей промышленности и т.д. моторы используются в промышленности, но имеют хорошие характеристики своих братьев с короткозамкнутым ротором.
см. Здесь видео о том, как работает асинхронный двигатель.
Синхронные двигатели
В отличие от асинхронных двигателей, синхронные двигатели в основном не запускаются самостоятельно, несмотря на некоторые самовозбуждающие конфигурации, которые можно найти для некоторых небольших приложений. Создание магнитного поля ротора для этих типов электродвигателей не зависит от тока, а скорость вращения синхронного двигателя привязана к частоте сети. Другими словами, вращение вала синхронных электродвигателей происходит с синхронизацией скорости с частотой питающего тока.
Что делает их интересными для промышленных предприятий с более высокими требованиями к мощности, так это их высокая эффективность преобразования переменного тока в работу и их способность корректировать коэффициент мощности. Это означает, что они могут работать при единичном коэффициенте мощности, что предполагает равную активную мощность нагрузки с полной мощностью цепи.
Синхронные двигатели переменного тока бывают двух типов: без возбуждения и с возбуждением постоянным током. Синхронные электродвигатели без возбуждения подразделяются на три категории: с постоянным магнитом, реактивным сопротивлением и гистерезисным типом.
Синхронные двигатели без возбуждения
Электродвигатели синхронного типа без возбуждения спроектированы таким образом, чтобы их ротор следовал синхронизированному вращающемуся полю на разных этапах, что создавало бы постоянное поле. Когда ротор синхронных двигателей без возбуждения вращается, он взаимодействует со статором. Взаимодействие между полюсами поля статора и ротором приводит к тому, что ротор становится электромагнитным с северным и южным полюсами. Ротор электродвигателей этих типов обладает высокой удерживающей способностью, что означает, что он обладает высокой способностью удерживать или сопротивляться намагничиванию.
Как уже упоминалось, существует три типа синхронных двигателей без возбуждения, а именно синхронные двигатели с постоянным магнитом, реактивные и гистерезисные синхронные двигатели. Давайте обсудим их далее.
Постоянный магнит
В синхронных типах электродвигателей с постоянными магнитами стальной ротор прикреплен к постоянному магниту, например неодимовому магниту, который обеспечивает непрерывное непрерывное магнитное поле. Это реализуется посредством взаимодействия ротора с вращающимся полем, создаваемым статором, к которому подключен источник переменного тока.Постоянная часть ротора привязана к вращающемуся полю статора, что обеспечивает синхронную скорость вращения ротора. Эта конструкция похожа на бесщеточные двигатели постоянного тока, которые будут рассмотрены позже.
Для запуска этих типов электродвигателей необходим источник переменной частоты, поскольку ротор в этой конструкции представляет собой постоянный магнит, создающий постоянное магнитное поле. Управление скоростью осуществляется с использованием прямого управления крутящим моментом и управления с ориентацией на поле.
Сопротивление
Ротор для реактивных синхронных электродвигателей, не имеющих обмоток, изготовлен из ферромагнитного материала, на котором индуцируются непостоянные магнитные полюса. Причина названия в том, что он генерирует крутящий момент, используя магнитное сопротивление, то есть которое является мерой сопротивления или сопротивления материала магнитному потоку.
Изображение предоставлено ABB GroupЧисло полюсов ротора реактивных синхронных двигателей равно числу полюсов статора.Число полюсов всегда четное и обычно равно четырем или шести. Однако количество полюсов ротора меньше, чем количество полюсов статора, чтобы предотвратить пульсации крутящего момента. Пульсация крутящего момента — это периодическое увеличение и уменьшение крутящего момента, создаваемого валом двигателя, что не очень хорошо.
Когда ротор статора находится под напряжением, на ротор действует крутящий момент в направлении уменьшения магнитного сопротивления. Этот крутящий момент будет тянуть ближайший к ротору усилие, так что он будет выровнен с полем статора в положение с меньшим сопротивлением.Следовательно, чтобы поддерживать вращение, полюс статора должен постоянно выходить из полюса ротора, вращаясь впереди полюсов ротора.
Гистерезис
В синхронных двигателях с гистерезисом при вращении магнитного поля статора на ротор действует реверсивное магнитное поле. Причина этого явления в том, что цилиндрический ротор этих типов электродвигателей изготовлен из материала с высокой коэрцитивной силой. Это означает, что как только ротор намагничен в каком-то направлении, вы не сможете легко изменить его направление, не применяя большое обратное магнитное поле.
Изображение из ElprocusОбратное магнитное поле, испытываемое каждым небольшим объемом ротора из-за вращения магнитного поля статора, будет продолжаться до тех пор, пока не будет достигнута синхронная скорость. Это дает нам преимущество синхронных двигателей с гистерезисом, которые могут создавать постоянный крутящий момент до достижения синхронной скорости без пульсаций крутящего момента. Еще один момент, связанный с этими типами двигателей, заключается в том, что, несмотря на то, что обычно имеется короткозамкнутая обмотка для запуска двигателя, двигатель может запускаться самостоятельно из-за того, что движение ротора зависит только от фазовой задержки между статором и магнитным полем ротора. поля.
Синхронные двигатели с возбуждением постоянным током
Ротор этих типов электродвигателей возбуждается с помощью внешнего источника постоянного тока, который создает магнитный поток, необходимый для приведения ротора в движение. Это можно сделать с помощью отдельного источника постоянного тока или источника, напрямую подключенного к валу двигателя.
Вы можете посмотреть видео здесь, чтобы увидеть, как работают синхронные двигатели.
Линейные
Линейные двигатели — это один из типов электродвигателей переменного тока, создающих линейную силу вместо крутящего момента.Они похожи на те, что уже обсуждались ранее, за исключением того, что их роторы и статоры развернуты. Они широко используются в электропоездах, приводах, используемых в раздвижных дверях и т. Д.
Это видео покажет вам, как работают такие двигатели.
Двигатели постоянного тока
В электродвигателях постоянного тока электрическая энергия постоянного тока преобразуется в механическую. Двигатели постоянного тока могут быть с самовозбуждением или с независимым возбуждением. Однако двигатели постоянного тока с самовозбуждением, вероятно, более интересны, если вы можете использовать их в своих приложениях.
Двигатели постоянного тока также можно классифицировать в зависимости от того, являются ли они щеточными двигателями постоянного тока (BDC) или бесщеточными двигателями постоянного тока (BLDC). Щеточные двигатели постоянного тока дешевы и просты в разработке и производстве; однако двигатели BLDC сложны и дороги. В целом, небольшие и малочувствительные приложения, такие как электроприборы, автомобильные электрические стеклоподъемники и сиденья, могут использовать двигатели BDC, тогда как такие приложения, как HVAC и охлаждение, автомобильные электродвигатели и другие подобные промышленные системы, будут работать с BLDC.
Щеточный DC
Щеточные электродвигатели постоянного тока имеют внутреннюю коммутацию, что означает, что крутящий момент создается непосредственно из мощности постоянного тока, подаваемой с помощью стационарных постоянных магнитов или электромагнитов и вращающихся электромагнитов.
Достаточно недорогие и очень надежные. Вы можете легко контролировать их скорость, используя простую двухпроводную систему, хотя есть некоторые конструкции с фиксированной скоростью, для которых нет управления скоростью.
У щеточных электродвигателей постоянного тока также могут быть некоторые недостатки, такие как необходимость периодического обслуживания, в частности, связанного с щетками, и малый срок службы для выполнения сложных работ, для которых высоки крутящий момент или скорость. Другой важной проблемой является их ограниченная скорость из-за щеток и генерации электромагнитных помех (EMI) из-за искрения щеток.
Изображение с ZGC MotorШунтирующая обмотка
Катушки возбуждения или обмотки электродвигателей постоянного тока с шунтирующей обмоткой и щеткой подключены параллельно якорю; отсюда и название этих типов электродвигателей. В этой конфигурации обмоток подаваемый ток будет распределяться между шунтирующим якорем и обмотками возбуждения. С двигателями BDC с параллельной обмоткой регулировать скорость очень просто.
Когда нагрузка прикладывается к электродвигателям постоянного тока с шунтирующей обмоткой и щеточным электродам, скорость имеет тенденцию к снижению, но в этой ситуации сетевое напряжение будет увеличиваться.Когда сетевое напряжение увеличивается, ток якоря увеличивается, а это означает, что будет генерироваться некоторый дополнительный крутящий момент, который компенсирует снижение скорости из-за приложения нагрузки, что делает эти типы электродвигателей устройствами с постоянной скоростью.
Все это означает, что вы, вероятно, захотите рассмотреть такой двигатель, если бы у вас были низкие требования к пусковому крутящему моменту, а также хорошее регулирование скорости.
Последовательная обмотка
Если вместо параллельного соединения обмоток якоря и обмоток возбуждения последовательно, а не параллельно, получится щеточный электродвигатель постоянного тока с последовательной обмоткой.Понятно, что ток в обмотках возбуждения и якоря для этой конструкции будет одинаковым. Им потребуется значительный ток, но крутящий момент, который они создают, очень высок, особенно при запуске.
Однако эта конструкция не очень хороша с регулированием скорости. Причина в том, что, несмотря на повышенное напряжение из-за нагрузки, двигатель будет увеличивать ток для нарастания, но магнитное поле в конечном итоге станет насыщенным, что означает, что магнитный поток между якорем и статором не будет расти достаточно быстро, что означает недостаточный крутящий момент. будет сгенерирован, чтобы вернуть скорость к предыдущим условиям.
Можно сказать, что вы могли бы рассмотреть типы электродвигателей, когда вам нужен высокий пусковой крутящий момент, но не слишком заботитесь о регулировании скорости.
Составная обмотка
Что делать, если вам нужен НМТ с высоким пусковым моментом, а также с хорошим контролем скорости? Что ж, для этого тоже есть решение: электродвигатели постоянного тока со сложной обмоткой и щеткой. Двигатели с комбинированной обмоткой представляют собой «гибрид» двигателей постоянного тока с шунтирующей обмоткой и щеточных двигателей с последовательной обмоткой. В этих типах электродвигателей имеется обмотка возбуждения, включенная последовательно с обмоткой якоря, и еще одна обмотка возбуждения, шунтирующая с обмоткой якоря.
Существует конфигурация с коротким шунтом и конфигурация с длинным шунтом для двигателей BDC с комбинированной обмоткой. Если бы поле шунта было только параллельно якорю, это была бы конфигурация с коротким шунтом, но если бы поле шунта было параллельно с последовательностью якоря и последовательным полем, это был бы BDF с составной обмоткой с длинным шунтом.
У вас может быть полярность шунтирующего поля, совпадающая с полярностью последовательного поля, что создает кумулятивную составную обмотку BDC. Это двигатель с высоким пусковым моментом и хорошей регулировкой скорости.У вас также может быть полярность шунтирующего поля, противоположная последовательному полю, что делает дифференциальный двигатель с составной обмоткой.
Постоянный магнит
В щеточном двигателе постоянного тока с постоянными магнитами якорь окружен постоянными магнитами, прикрепленными к внутренней поверхности цилиндрического статора этих типов электродвигателей. Магниты установлены таким образом, чтобы противоположные полюса соседних магнитов были обращены к якорю. Якорь, который является проводником с током, поэтому будет испытывать механическую силу, действующую на него со стороны магнитного поля этой системы постоянных магнитов, и будет вращаться в его направлении.
Серводвигатель
Серводвигатели на самом деле могут не относиться к одному из типов электродвигателей и, вероятно, представляют собой отдельную категорию, но поскольку в самых простых небольших из них используются двигатели с постоянным магнитом BDC вместе с системой управления с обратной связью, мы решили упомяните их и здесь. Серводвигатели — это механические устройства или приводы, которые очень удобны, когда дело доходит до точного управления положением, скоростью или ускорением. Они состоят из двигателя постоянного тока, датчика положения и контроллера.
Бесщеточный DC
Вы, наверное, заметили, что щетки и их взаимодействие с механическим коммутатором двигателей BDC являются причиной появления бесщеточных электродвигателей постоянного тока. Что ж, щетки изнашиваются и требуют обслуживания и замены, а щетки создают искры, которые опасны для мест, где есть вероятность взрыва.
Бесщеточные двигатели постоянного тока коммутируются с помощью электроники, что обеспечивает им более длительный срок службы, лучшие характеристики скорости и крутящего момента, высокую эффективность, лучший динамический отклик и более высокие изменения скорости, а также бесшумную работу.
Эти типы электродвигателей могут использоваться как для переменных, так и для фиксированных нагрузок, а также для позиционирования, и они становятся все более популярными на рынке.
Видео, в котором сравниваются щеточные двигатели постоянного тока с бесщеточными двигателями постоянного тока и критерии выбора между ними, см. Здесь.
Заключение
Таким образом, речь шла о типах электродвигателей. Мы попытались представить простое руководство по этим типам двигателей. В настоящее время существуют разные и гибкие.Назначение двигателя — всякий раз, когда «требуется управление движением», это лучший выбор. Двигатель должен поддерживать использование и общее функционирование системы. Это отличный шанс, если вам нужно больше узнать о типах электродвигателей, не стесняйтесь зарегистрироваться в Linquip. Наши специалисты будут рады получить ваши вопросы и с энтузиазмом на них ответить.
Различные типы двигателей и их применение
При покупке двигателя часто спрашивают, какая технология лучше, переменного или постоянного тока, но на самом деле это зависит от области применения и стоимости.
Двигатели переменного тока
Двигатели переменного токаобладают большой гибкостью по многим функциям, включая управление скоростью (VSD — приводы с регулируемой скоростью), и имеют гораздо большую установленную базу по сравнению с двигателями постоянного тока, некоторые из ключевых преимуществ:
- Низкое энергопотребление при запуске
- Контролируемое ускорение
- Регулируемая рабочая скорость
- Управляемый пусковой ток
- Регулируемый предел крутящего момента
- Снижение нарушений в ЛЭП
Текущая тенденция для VSD заключается в добавлении дополнительных функций и функций программируемого логического управления (ПЛК), которые добавляют преимущества, но требуют большего технического опыта во время обслуживания.
Щелкните здесь, чтобы увидеть пример двигателя переменного тока от RS
Типы двигателей переменного тока включают:
Синхронный
В этом типе двигателя вращение ротора синхронизировано с частотой питающего тока, а скорость остается постоянной при переменных нагрузках, поэтому он идеально подходит для привода оборудования с постоянной скоростью и используется в высокоточных устройствах позиционирования, таких как роботы. , КИПиА
Щелкните здесь, чтобы увидеть пример синхронного двигателя из RS
Индукция (асинхронная)
Этот тип двигателя использует электромагнитную индукцию из магнитного поля обмотки статора для создания электрического тока в роторе и, следовательно, крутящего момента.Это наиболее распространенный тип двигателей переменного тока, который важен для промышленности из-за их нагрузочной способности, при этом однофазные асинхронные двигатели используются в основном для небольших нагрузок, например, в бытовых приборах, тогда как трехфазные асинхронные двигатели чаще используются в промышленности. приложения, включая компрессоры, насосы, конвейерные системы и подъемные механизмы.
Нажмите здесь, чтобы увидеть пример асинхронного двигателя RS
Двигатели постоянного тока
Двигатели постоянного токабыли первым широко используемым типом двигателей, и начальные затраты на системы (двигатели и привод) обычно ниже, чем на системы переменного тока для маломощных агрегатов.Однако при более высокой мощности общие затраты на техническое обслуживание увеличиваются, и это необходимо учитывать. Скорость двигателей постоянного тока можно регулировать путем изменения напряжения питания, они доступны в широком диапазоне напряжений, самые популярные типы — 12 и 24 В. Преимущества двигателя постоянного тока:
- Простая установка
- Регулировка скорости в широком диапазоне
- Быстрый запуск, остановка, реверсирование и ускорение
- Высокий пусковой крутящий момент
- Линейная кривая скорость-крутящий момент
Двигатели постоянного тока широко используются в небольших инструментах и бытовой технике, вплоть до электромобилей, подъемников и подъемников
Щелкните здесь, чтобы увидеть пример двигателей постоянного тока от RS
Два общих типа:
Матовый
Это более традиционный тип двигателя, который обычно используется в приложениях, чувствительных к стоимости, где система управления относительно проста, например, в потребительских приложениях и более простом промышленном оборудовании, эти типы двигателей можно разбить на:
- Series Wound — здесь обмотка возбуждения соединена последовательно с обмоткой ротора, а регулирование скорости осуществляется путем изменения напряжения питания, однако этот тип обеспечивает плохое управление скоростью, и по мере увеличения крутящего момента на двигателе скорость падает.Применяется в автомобилях, подъемниках, подъемниках и кранах, поскольку он имеет высокий пусковой крутящий момент.
- Шунтирующая обмотка — Этот тип имеет один источник напряжения, а обмотка возбуждения подключена параллельно обмотке ротора и может обеспечивать повышенный крутящий момент без снижения скорости из-за увеличения тока двигателя. Он имеет средний уровень пускового момента при постоянной скорости, поэтому подходит для применения в токарных станках, пылесосах, конвейерах и шлифовальных машинах.
- Составная обмотка — это совокупность последовательностей и шунтов, где полярность шунтирующей обмотки такова, что она добавляется к последовательным полям.Этот тип имеет высокий пусковой крутящий момент и может плавно работать при незначительном изменении нагрузки, он используется для привода компрессоров, центробежных насосов с регулируемым напором, ротационных прессов, дисковых пил, ножниц, элеваторов и конвейеров непрерывного действия
- Постоянный магнит — Как следует из названия, вместо электромагнита используется постоянный магнит, который используется в приложениях, где требуется точное управление и низкий крутящий момент, например, в робототехнике, сервосистемах.
Бесщеточный
Бесщеточные двигатели устраняют некоторые проблемы, связанные с более распространенными щеточными двигателями (короткий срок службы для интенсивных применений), и имеют более простую механическую конструкцию (не имеют щеток).Контроллер мотора использует датчики Холла для определения положения ротора, с помощью этого контроллер может точно управлять мотором посредством тока в катушках ротора) для регулирования скорости. Преимущества этой технологии — долгий срок службы, небольшие затраты на обслуживание и высокий КПД (85-90%), тогда как недостатки — более высокие начальные затраты и более сложные контроллеры. Эти типы двигателей обычно используются для регулирования скорости и положения в приложениях, где требуется надежность и устойчивость, таких как вентиляторы, насосы и компрессоры.
Примером бесщеточной конструкции являются шаговые двигатели, которые в основном используются для управления положением с разомкнутым контуром, начиная с принтеров и заканчивая промышленными приложениями, такими как высокоскоростное оборудование для захвата и размещения.
Бесщеточные двигатели также доступны с устройством обратной связи, которое позволяет управлять скоростью, крутящим моментом и положением двигателя, а интеллектуальная электроника управляет всеми тремя, поэтому, если для быстрого ускорения до определенной скорости требуется больший крутящий момент, то подается больший ток. , они известны как бесщеточные сервомоторы.
Пример щеточного и бесщеточного двигателей постоянного тока
Электродвигатели— различные типы и применения каждого двигателя
Электродвигатель — это удобное устройство, вырабатывающее механическую энергию из электрической энергии. Сегодня двигатели используются как в жилых, так и в промышленных условиях. Однако выбор двигателя будет зависеть от ваших конкретных потребностей.
Во-первых, различные типы двигателей на рынке делают процесс покупки утомительным. Вы должны выбирать между двигателями переменного тока, двигателями постоянного тока и двигателями специального назначения.
Типы двигателей переменного тока
Асинхронный двигатель переменного тока
Асинхронный двигатель является наиболее распространенным типом двигателя переменного тока на современном рынке. Его также называют асинхронным. Асинхронный двигатель переменного тока работает с импульсом ниже его синхронной скорости. Здесь электрический ток создает крутящий момент в роторе. Асинхронные двигатели используют электромагнитную индукцию для преобразования энергии из электрической в механическую.
Классификация асинхронных двигателей основана на типе ротора; беличья клетка или контактное кольцо.Асинхронные двигатели отлично подходят для промышленности из-за их допустимой нагрузки.
Конструкция компрессоров, насосов, подъемных механизмов и конвейерных систем входит в число его многочисленных областей применения.
Синхронный двигатель переменного тока
Этот тип двигателя в основном зависит от трехфазного источника питания. Статор генерирует ток возбуждения, в то время как ротор зависит от тока возбуждения для своего вращения. Скорость вращения ротора соответствует частоте подаваемого тока.В этом двигателе импульс не зависит от нагрузки.
Синхронные двигатели переменного токанаходят широкое применение в робототехнике, управлении технологическими процессами и автоматизации. Эти двигатели используются в большинстве оборудования с постоянной скоростью.
Типы двигателей постоянного тока
Матовый двигатель постоянного тока
В этом двигателе устройство щеток статора определяет ток. Его крутящий момент создается от источника постоянного тока с помощью электромагнитов. Они дешевы и очень эффективны.
В машинах с высоким пусковым моментом, таких как краны, подъемники и лифты, используются щеточные электродвигатели постоянного тока.Они также применимы для целей с постоянной скоростью, таких как пылесосы и конвейеры.
Бесщеточный двигатель постоянного тока
Эти двигатели обеспечивают высокую производительность при меньшем размере по сравнению с щеточными двигателями постоянного тока. Они работают с контактными кольцами, коммутаторами или встроенным контроллером.
Их эффективность, улучшенный динамический отклик, бесшумная работа и высокая скорость переключения делают их отличным выбором для большинства отраслей промышленности. Фиксированная нагрузка, переменная нагрузка и положение зависят от этого типа двигателя.
Другие типы двигателей
Серводвигатели
Это двигатели, соединенные с датчиками обратной связи для помощи в позиционировании, что является ключом к робототехнике. Они позволяют точно контролировать угловое положение, ускорение и скорость. Серводвигатели обладают высокой эффективностью и точностью, поэтому используются во вращающихся компонентах машин.
Его применение включает строительство игрушек, автомобилей, самолетов, бытовой электроники и т. Д.
Шаговый двигатель
Судя по названию, шаговые двигатели работают ступенчато.Он преобразует электрическую энергию в обширные дискретные механические ступени. Поскольку другие двигатели вращаются на 180 градусов, шаговые двигатели могут делать десять шагов по 18 градусов каждый.
В этом случае для завершения оборота потребуется десять электрических импульсов. Они используются в плоттерах, производстве схем, инструментах управления технологическим процессом, медицинских сканерах, жидкостных насосах, респираторах, автоматической фокусировке цифровых камер и т. Д.
Гистерезисный двигатель
В гистерезисных двигателях магнитные поля статора и ротора противоположны.После намагничивания ротора вам потребуется мощное обратное магнитное поле, чтобы перевернуть его. Гистерезис и вихревые токи от ротора создают крутящий момент.
Двигатели с гистерезисоммогут генерировать крутящий момент без пульсаций, пока вы не достигнете синхронной скорости. Они используются при изготовлении звуковых проигрывателей, диктофонов и т. Д.
В Mader Electric наша команда экспертов готова помочь вам со всеми вашими потребностями в обслуживании двигателей как в бизнесе, так и в быту. Свяжитесь с нами сегодня с любыми вопросами или проблемами, связанными с электродвигателями, и наши специалисты будут рады помочь вам найти нужные решения.
Выбор подходящего электродвигателя
Производители все чаще задумываются об энергоэффективности . Более зеленая и экологически чистая экономика — одна из целей Конференции Организации Объединенных Наций по изменению климата 2015 года, которую взяли на себя многие государства. Но прежде всего в целях ограничения потребления и экономии в последние годы промышленность приобретает более энергоэффективное оборудование. Согласно исследованию Европейской комиссии, на двигатели приходится 65% промышленного потребления энергии в Европе.Поэтому принятие мер в отношении двигателей является важным шагом на пути к сокращению выбросов CO2. Комиссия даже прогнозирует, что к 2020 году можно повысить энергоэффективность двигателей европейского производства на 20–30%. В результате будет на 63 миллиона тонн меньше CO2 в атмосфере и на 135 миллиардов киловатт-часов.
Если вы также хотите интегрировать энергоэффективные двигатели и получить сбережения, внося свой вклад в развитие планеты, вам сначала нужно взглянуть на стандарты энергоэффективности для двигателей в вашей стране или географическом регионе .Но будьте осторожны, эти стандарты распространяются не на все двигатели, а только на асинхронные электродвигатели переменного тока .
Международные стандарты
- Международная электротехническая комиссия (МЭК) определила классы энергоэффективности для электродвигателей, размещенных на рынке, известные как код IE, которые кратко изложены в международном стандарте МЭК .
- IEC определила четыре уровня энергоэффективности, которые определяют энергетические характеристики двигателя:
- IE1 относится к СТАНДАРТНОЙ эффективности
- IE2 относится к ВЫСОКОЙ эффективности
- IE3 относится к ПРЕМИУМ-КПД
- IE4 , все еще изучается, обещает эффективность SUPER PREMIUM
- МЭК также внедрила стандарт IEC 60034-2-1: 2014 для испытания электродвигателей .Многие страны используют национальные стандарты испытаний, а также ссылаются на международный стандарт IEC 60034-2-1.
В Европе
ЕС уже принял несколько директив, направленных на снижение энергопотребления двигателей, включая обязательство производителей размещать на рынке энергоэффективные двигатели:
- Следовательно, класс IE2 является обязательным для всех двигателей с 2011 г.
- Класс IE3 является обязательным с января 2015 года для двигателей мощностью 7.От 5 до 375 кВт (или IE2, если эти двигатели оснащены преобразователем частоты)
- Класс IE3 является обязательным с января 2017 года для двигателей мощностью от 0,75 до 375 кВт (или IE2, если эти двигатели имеют преобразователь частоты).
В США
В США действуют стандарты, определенные американской ассоциацией NEMA (Национальная ассоциация производителей электрооборудования). С 2007 года минимальный требуемый уровень установлен на IE2.
Такая же классификация применяется к Австралии и Новой Зеландии .
Азия
В Китай корейские стандарты MEPS (минимальный стандарт энергоэффективности) применяются к трехфазным асинхронным двигателям малого и среднего размера с 2002 года (GB 18693). В 2012 году стандарты MEPS были гармонизированы со стандартами IEC, перейдя от IE1 к IE2, а теперь и к IE3.
Япония гармонизировала свои национальные правила с классами эффективности IEC и включила электродвигатели IE2 и IE3 в свою программу Top Runner в 2014 году.Представленная в 1999 году программа Top Runner вынуждает японских производителей постоянно предлагать на рынке новые модели, которые более энергоэффективны, чем предыдущие поколения, тем самым стимулируя эмуляцию и инновации в области энергетики.
Индия имеет знак сравнительной эффективности с 2009 года и национальный стандарт на уровне IE2 с 2012 года.
Что такое электродвигатель? Определение и типы
Определение : Электродвигатель — это электромеханическая машина, преобразующая электрическую энергию в механическую.Другими словами, устройство, создающее вращающую силу, называется двигателем. Принцип работы электродвигателя в основном зависит от взаимодействия магнитного и электрического поля. Электродвигатели в основном подразделяются на два типа. Это двигатель переменного тока и двигатель постоянного тока. Двигатель переменного тока принимает переменный ток в качестве входа, тогда как двигатель постоянного тока принимает постоянный ток.
Типы электродвигателей
Классификация электродвигателя показана на рисунке ниже.
Двигатель переменного тока
Двигатель переменного тока преобразует переменный ток в механическую энергию. Он подразделяется на три типа; это асинхронный двигатель, синхронный двигатель, линейный двигатель. Подробное описание двигателя приведено ниже.
1. Асинхронный двигатель
Машина, которая никогда не работает с синхронной скоростью, называется асинхронным или асинхронным двигателем. Этот двигатель использует явление электромагнитной индукции для преобразования электроэнергии в механическую.По конструкции ротора различают два типа асинхронных двигателей. А именно асинхронный двигатель с короткозамкнутым ротором и асинхронный двигатель с фазной обмоткой.
- Ротор с короткозамкнутым ротором — Двигатель, который состоит из ротора с короткозамкнутым ротором, известен как асинхронный двигатель с короткозамкнутым ротором. Ротор с короткозамкнутым ротором снижает гудение и магнитную блокировку ротора.
- Ротор с фазовой обмоткой — Этот ротор также известен как ротор с контактным кольцом, а двигатель, использующий этот тип ротора, известен как ротор с фазовой обмоткой.
По фазам асинхронный двигатель подразделяется на два типа. Это однофазный асинхронный двигатель и трехфазный асинхронный двигатель.
- Однофазный асинхронный двигатель — Машина, которая преобразует электрическую мощность однофазного переменного тока в механическую с помощью явления электромагнитной индукции, известна как однофазный асинхронный двигатель.
- T Трехфазный асинхронный двигатель — Двигатель, который преобразует трехфазную электрическую мощность переменного тока в механическую энергию, такой тип двигателя известен как трехфазный асинхронный двигатель.
2. Линейный двигатель
Двигатель, который создает линейную силу вместо силы вращения, известен как линейный двигатель. Этот двигатель имеет развернутые ротор и статор. Такой тип двигателя используется в раздвижных дверях и в приводах.
3. Синхронный двигатель
Машина, которая преобразует переменный ток в механическую энергию с желаемой частотой, известна как синхронный двигатель. В синхронном двигателе скорость двигателя синхронизирована с частотой питающего тока.
Синхронная скорость измеряется относительно вращения магнитного поля и зависит от частоты и полюсов двигателя. Синхронный двигатель подразделяется на два типа: реактивный и гистерезисный.
- Реактивный двигатель — Двигатель, процесс пуска которого подобен асинхронному двигателю и который работает как синхронный двигатель, известен как реактивный двигатель.
- Двигатель с гистерезисом — Двигатель с гистерезисом представляет собой тип синхронного двигателя, который имеет равномерный воздушный зазор и не имеет системы возбуждения постоянным током.Крутящий момент в двигателе создается гистерезисом и вихревым током двигателя.
Двигатель постоянного тока
Машина, преобразующая электрическую мощность постоянного тока в механическую, известна как двигатель постоянного тока. Его работа зависит от основного принципа: когда проводник с током помещается в магнитное поле, на него действует сила и возникает крутящий момент. Электродвигатели постоянного тока подразделяются на два типа: электродвигатели с самовозбуждением и электродвигатели с независимым возбуждением.
1. Двигатель с автономным возбуждением
Двигатель, в котором обмотка постоянного тока возбуждается отдельным источником постоянного тока, называется двигателем постоянного тока с отдельным возбуждением.С помощью отдельного источника обмотка якоря двигателя возбуждается и создает магнитный поток.
2. Двигатель с самовозбуждением
По подключению обмотки возбуждения двигатели постоянного тока с самовозбуждением подразделяются на три типа. Это двигатель постоянного тока с последовательной обмоткой, шунтирующий двигатель и двигатель постоянного тока с комбинированной обмоткой.
- Шунтирующий двигатель — Двигатель, в котором обмотка возбуждения расположена параллельно якорю, такой тип двигателя известен как параллельный двигатель.
- Двигатель серии — В этом двигателе обмотка возбуждения соединена последовательно с якорем двигателя.
- Двигатель с комбинированной обмоткой — Двигатель постоянного тока, который имеет как параллельное, так и последовательное соединение обмотки возбуждения, известен как комбинированный ротор. Двигатель с комбинированной обмоткой подразделяется на двигатели с коротким и длинным шунтом.
- Короткий шунтирующий двигатель — Если шунтирующая обмотка возбуждения параллельна только якорю двигателя, а не последовательному полю, то это известно как короткое шунтирующее соединение двигателя.
- Длинный шунтирующий двигатель — Если шунтирующая обмотка возбуждения параллельна как якорю, так и последовательной обмотке возбуждения, то двигатель называется длинным шунтирующим двигателем.
Помимо вышеупомянутых двигателей, существуют различные другие типы специальных машин, которые имеют дополнительные функции, такие как шаговый двигатель, серводвигатель переменного и постоянного тока и т. Д.
Что такое электродвигатель?
Электродвигатель — это устройство, которое преобразует электрический ток в механическое вращение шпинделя или ротора. Во многих приложениях вращение превращается в линейное движение.
Как работает электродвигатель?
Есть много вариантов и вариантов электродвигателей; например двигатели постоянного тока — щеточные или бесщеточные и двигатели переменного тока — индукционные (или асинхронные) и синхронные.Двигатели могут работать при различных напряжениях в зависимости от области применения и имеющегося источника питания.
Работа двигателя зависит от двух свойств электрического тока. Во-первых, электрический ток, протекающий по проводу или катушке, создает магнитное поле.
Во-вторых, изменение тока в проводнике, например от источника переменного тока, будет индуцировать напряжение в проводнике (самоиндукция) или во вторичном проводе (взаимная индуктивность).Протекание тока в цепи вторичного проводника также будет создавать магнитное поле, как указано выше.
Для магнита подобные полюса отталкиваются, а разные полюса притягиваются. Во всех двигателях конструкция использует это свойство для обеспечения непрерывного вращения ротора.
На приведенной ниже диаграмме показана волновая форма трехфазного переменного тока; каждая фаза разделена фазовым углом 120 0 , как показано на векторной диаграмме посередине.
При определенном фазовом угле будет результирующее направление для поля, которое может быть вычислено путем сложения векторов; постоянный магнит (ы) в роторе будет ориентироваться в соответствии с направлением поля, и по мере того, как форма волны переменного тока «прогрессирует» во времени, ротор будет вращаться, как показано.
Для 30 °:
Для 90 °:
Для 180 °:
И так далее в течение одного полного цикла (360 0 ), где ротор фактически вернется в исходное положение и снова повторит процесс.
Как выбрать электродвигатель?
Не все приложения подходят для использования трехфазного синхронного двигателя; Несмотря на то, что размер двигателя эффективен для его мощности, указанный выше двигатель будет слишком большим, например, для привода DVD-плеера.Кроме того, трехфазное питание не было бы идеальным для домашних (или большинства коммерческих) ситуаций; Таким образом, применение является важным фактором при определении размера и напряжения питания.
Мощность (через крутящий момент), требуемая от двигателя, является жизненно важным фактором; каковы динамические аспекты приложения — нагрузка, ускорение / замедление и расстояния, на которые необходимо перемещаться в радиальном или боковом направлении?
Также важна стабильность скорости вращения; двигатель должен работать с постоянной скоростью даже на низких оборотах?
Наконец, необходимо учитывать условия окружающей среды — какова рабочая температура и могут ли быть проблемы с водой или пылью? Будет ли двигатель работать во взрывоопасной среде и требовать ли он соответствия требованиям ATEX?
Типы электродвигателей
Как указано выше, существует множество вариантов двигателей; с питанием от постоянного или переменного тока и различных напряжений, в зависимости от области применения.
При выборе двигателей следует учитывать разницу между сервомоторами и шаговыми двигателями. Серводвигатель имеет механизм обратной связи — сигнал обратной связи сравнивается с заданным значением до тех пор, пока не будет нулевой разницы, когда двигатель достигнет желаемого положения.
Шаговый двигатель также предлагает управление, но его можно рассматривать как оцифрованную версию двигателя специальной конструкции. Несколько независимых обмоток статора (статор — это неподвижная часть двигателя) и специально разработанный ротор позволяют двигателю двигаться в указанное положение или угол против команды.
Шаговые двигатели идеально подходят для маломощных и недорогих приложений, таких как привод компакт-дисков. И наоборот, серводвигатели лучше подходят для приложений с большей мощностью, высоким ускорением и высокой точностью.
Типичные области применения электродвигателей
Электродвигатели используются в самых разных областях — бытовых, таких как стиральные машины для компакт-дисков, DVD-дисков и т. Д., И в коммерческих, таких как медицина, офисы и промышленность.В сочетании с линейным приводным механизмом типичными приложениями являются, в частности, автомобилестроение, транспортировка материалов, робототехника, продукты питания и напитки, упаковка.
Нужно ли мне что-нибудь еще для работы электродвигателей?
Необходимы подходящие источники электропитания и соответствующие кабели, ведущие к оборудованию. В любом применении двигатель должен быть подключен к его ведомым компонентам напрямую, через зубчатые колеса или ремни, и для этого может потребоваться гашение вибрации.Датчики температуры являются разумным дополнением, и в случае возможного перегрева потребуется вентилятор с соответствующей вентиляцией.
Кабели необходимы для передачи сигналов питания и управления между двигателем и приводом (см. Статью «Что такое электропривод»).
.