


Пуск — двигатель — параллельное возбуждение
Пуск — двигатель — параллельное возбуждение
Cтраница 1
Пуск двигателя параллельного возбуждения производится с введенным в его якорную цепь дополнительным ( пусковым) сопротивлением, при помощи которого может быть ограничен пик тока до любой заданной величины и получен требуемый пусковой момент. При этом возникают толчки ( пики) тока и момента. [1]
Выше был рассмотрен процесс пуска двигателя параллельного возбуждения. Характеристики этого режима расположены в первом квадранте координатного поля, в котором скорость и момент имеют положительные знаки. [2]
Пуск двигателя смешанного возбуждения происходит аналогично пуску двигателей последовательного и параллельного возбуждения. Методы расчета пусковых резисторов двигателей последовательного и смешанного возбуждения также аналогичны. [3]
Процесс пуска асинхронного двигателя с фазным ротором протекает аналогично процессу пуска двигателя параллельного возбуждения. Сопротивление пускового реостата обычно рассчитывают так, чтобы пусковой момент составил ( 0 8 — 0 9) Мк; число ступеней пускового реостата обычно принимают 2 — 3, однако при этом следует убедиться в том, что момент переключения больше момента статического сопротивления при пуске. [5]
Сличим полученные данные с результатами, к которым приводит аналитический расчет ступеней ускорения. Так как пуск двигателей параллельного возбуждения производится при неизменном магнитном потоке, то ток якоря во время пуска пропорционален моменту. [6]
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения рис. 10 — 2), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения. [8]
Страницы: 1
7) Как осуществляется пуск двигателя параллельного возбуждения?
Двигатель
с параллельным возбуждением. В этом
двигателе (рис. 1, а) обмотка возбуждения
подключена параллельно с обмоткой якоря
к сети. В цепь обмотки возбуждения
включен регулировочный реостат Rр.в.,
а в цепь якоря — пусковой реостат Rп .
Характерной особенностью двигателя
является то, что его ток возбуждения Iв не
зависит от тока якоря Iа (тока
нагрузки), так как питание обмотки
возбуждения по существу независимое.
Следовательно, пренебрегая размагничивающим
действием реакции якоря, можно приближенно
считать, что и поток двигателя не зависит
от нагрузки. При этом условии согласно
(Формуле 1) и (Формуле 2) получаем, что
зависимости
Рис.
1. Схема двигателя с параллельным
возбуждением и его моментная и скоростная
характеристики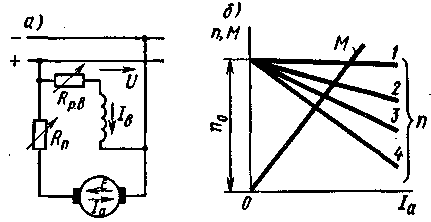
М = сМФIа
п = Е/(се Ф) = (U — Iа ΣRа )/(се Ф)
Формула 2 – частота вращения
Рис.
2. Механические и рабочие характеристики
двигателя с параллельным возбуждением
Если в цепь якоря включен добавочный резистор или реостат Rп , то
п = [U — Iа(ΣRа + Rп
где n0 = U/(сеФ) — частота вращения при холостом ходе;
Δп = (ΣRа + Rп )Iа /(сеФ) — снижение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя.
Пуск
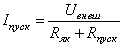
двигателя с параллельным возбуждением. Схема
включения в сеть двигателей этого типа
показана на рис. 361. Так как здесь цепи
якоря и индуктора не зависят друг от
друга, то ток в них можно регулировать
независимо при помощи отдельных
реостатов, включенных в эти цепи.
Реостат 
 ,
включенный в цепь индуктора, –
регулировочным. При
пуске в ход двигателя с параллельным
возбуждением пусковой реостат должен
быть обязательно полностью включен; по
мере того как двигатель набирает частоту
вращения, сопротивление реостата постепенно
уменьшают и при достижении нормальной
частоты вращения этот реостат выводится
из цепи полностью. Двигатели с параллельным
возбуждением, особенно значительной
мощности, ни в коем случае нельзя включать
без пускового реостата. Точно
так же при выключении двигателя следует
сначала постепенно ввести реостат и
лишь после этого выключить рубильник,
соединяющий двигатель с сетью.
,
включенный в цепь индуктора, –
регулировочным. При
пуске в ход двигателя с параллельным
возбуждением пусковой реостат должен
быть обязательно полностью включен; по
мере того как двигатель набирает частоту
вращения, сопротивление реостата постепенно
уменьшают и при достижении нормальной
частоты вращения этот реостат выводится
из цепи полностью. Двигатели с параллельным
возбуждением, особенно значительной
мощности, ни в коем случае нельзя включать
без пускового реостата. Точно
так же при выключении двигателя следует
сначала постепенно ввести реостат и
лишь после этого выключить рубильник,
соединяющий двигатель с сетью. 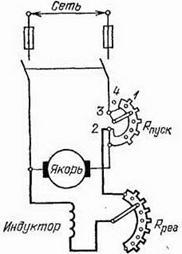
Рис. 361. Схема включения двигателя с параллельным возбуждением. Латунная дуга 1, по которой движется рычаг пускового реостата, через зажим 2 присоединена к концу регулировочного реостата, а через зажим 3 – к пусковому реостату. Это делается для того, чтобы при переводе пускового реостата на холостой контакт 4 и выключении тока цепь возбуждения не разрывалась
Нетрудно понять соображения, которыми вызваны эти правила включения и выключения двигателей. Мы видели, что ток в якоре
 ,
,
где  –
напряжение сети, а
–
напряжение сети, а  —
э. д. с., индуцированная в обмотках якоря.
В первый момент, когда двигатель еще не
успел раскрутиться и набрать достаточную
частоту вращения, э. д. с. очень
мала и ток через якорь приближенно равен
—
э. д. с., индуцированная в обмотках якоря.
В первый момент, когда двигатель еще не
успел раскрутиться и набрать достаточную
частоту вращения, э. д. с. очень
мала и ток через якорь приближенно равен
 .
. Сопротивление
якоря обычно очень мало. Оно рассчитывается
так, чтобы падение напряжения на
якоре  не
превышало 5-10 % от напряжения сети, на
которое рассчитан двигатель. Поэтому
при отсутствии пускового реостата ток
в первые секунды мог бы в 10-20 раз превысить
нормальный ток, на который рассчитан
двигатель при полной нагрузке, а это
для него очень опасно. При введенном же
пусковом реостате с сопротивлением пусковой
ток через якорь
не
превышало 5-10 % от напряжения сети, на
которое рассчитан двигатель. Поэтому
при отсутствии пускового реостата ток
в первые секунды мог бы в 10-20 раз превысить
нормальный ток, на который рассчитан
двигатель при полной нагрузке, а это
для него очень опасно. При введенном же
пусковом реостате с сопротивлением пусковой
ток через якорь
Сопротивление пускового реостата подбирают так, чтобы пусковой ток превышал нормальный не больше чем в 1,5-2 раза.
Поясним
сказанное числовым примером. Положим,
что мы имеем двигатель мощности 1,2 кВт,
рассчитанный на напряжение 120 В и имеющий
сопротивление якоря  .
Ток через якорь при полной нагрузке
.
Ток через якорь при полной нагрузке .
.
Если
бы мы включили этот двигатель в сеть
без пускового реостата, то в первые
секунды пусковой ток через якорь имел
бы значение 
в
10 раз превышающее нормальный рабочий
ток в якоре. Если же мы хотим, чтобы
пусковой ток превышал нормальный не
больше, чем в 2 раза, т. е. был равен 20 А,
то мы должны подобрать пусковое
сопротивление таким, чтобы имело место
равенство  ,
,
откуда  Ом.
Ом.
Ясно также, что для шунтового двигателя очень опасна внезапная его остановка без выключения, например вследствие резкого возрастания нагрузки, так как при этом э. д. с. падает до нуля и ток в якоре возрастает настолько, что избыток выделяемого в нем джоулева тепла может привести к расплавлению изоляции или даже самих проводов обмотки (двигатель «перегорает»).
Пуск и торможение двигателей постоянного тока с параллельным возбуждением
Пуск двигателей постоянного тока с параллельным возбуждением имеет некоторые особенности по сравнению с пуском асинхронных двигателей. При прямом пуске согласно естественной механической характеристике 1 (рис. 10) пусковой ток и пусковой момент были бы недопустимо большими. Поэтому пуск осуществляют с помощью пускового секционированного реостата R1 (рис. 10). Сопротивления секций пускового реостата выбирают так, чтобы двигатель при включении развивал заданный пусковой момент M2(M2 = 2МН). Минимальный момент М1 двигателя при пуске выбирают равным 1,1MН.
При включении в цепь якоря всех ступеней пускового реостата двигатель работает на механической характеристике 4 (рис. 10). При достижении минимального пускового момента М1 одну секцию реостата отключают и двигатель переходит на работу по характеристике 3. Затем отключают следующую секцию пускового реостата, пока двигатель не перейдет на работу по естественной механической характеристике.
Пуск двигателей постоянного тока обычно производится автоматически. Реостаты с ручным управлением почти не применяются, так как их обслуживание связано со значительными затратами времени. Кроме того, вручную трудно обеспечить заданный режим пуска и при неумелом обслуживании могут возникнуть недопустимые перегрузки.
Для двигателей постоянного тока с параллельным возбуждением применяют электрическое торможение трех видов: противовключением, динамическое и рекуперативное.
П ри
торможении противовключением естественную
механическую характеристику2 обратного
хода (рис. 11) использовать нельзя, так
как тормозной момент двигателя и ток
якоря были бы недопустимо большими.
ри
торможении противовключением естественную
механическую характеристику2 обратного
хода (рис. 11) использовать нельзя, так
как тормозной момент двигателя и ток
якоря были бы недопустимо большими.
Поэтому в режиме торможения противовключением используют только искусственные (реостатные) характеристики двигателя. Возникающий при переходе на искусственную характеристику 3 (из точки А на естественной характеристике 1 в точку B) тормозной момент по мере снижения скорости вращения якоря уменьшается. По окончании торможения (точка С) двигатель следует отключить от сети, так как иначе он перейдет в реверс.
Режим динамического торможения двигателя постоянного тока с параллельным возбуждением можно получить, отключив якорь двигателя от сети и замкнув его на реостат (рис. 11). Двигатель при этом начинает работать как генератор. Так как в этом случае напряжение к цепи якоря не подводится (U = 0), то уравнение механической характеристики (11) для режима динамического торможения принимает вид
 (15)
(15)
Это уравнение прямой, проходящей через начало координат. В зависимости от величины сопротивления в цепи якоря изменяется наклон характеристики (прямые 4…7) и величина тормозного момента (положение точки D). Для повышения интенсивности торможения сопротивление в цепи якоря можно изменять, и процессе торможения, переходя с одной характеристики на другую, как это делалось при пуске двигателя. Средний тормозной момент при этом увеличится, а время торможения сократился.
Как и при торможении асинхронных двигателей, в обоих рассмотренных случаях торможения двигателей постоянного тока с параллельным возбуждением кинетическая энергия движущихся масс превращается в тепло, выделяющееся в якоре двигателя.
Рекуперативный тормозной режим можно получить увеличением магнитного потока работающего двигателя. В этом случае двигатель с искусственной механической характеристики 8 переходит на работу по генераторной части механической характеристики, соответствующей большему магнитному потоку двигателя (например, из точки F в точку G). При скачкообразном увеличении магнитного потока двигателя э. д. с. якоря превышает напряжение сети, вследствие чего изменяется направление тока якоря и момента двигателя. Двигатель развивает тормозной момент, отдавая энергию в сеть. При снижении скорости якоря до скорости идеального холостого хода тормозной момент уменьшается до нуля.
Во всех рассмотренных случаях тормозные характеристики необходимо выбирать так, чтобы ток якоря во время торможения не превышал допустимые пределы.
20.Способы пуска двигателя постоянного тока
20.Способы пуска двигателя постоянного тока.
Возможны три способа пуска двигателя в ход:
1) прямой пуск, когда цепь якоря приключается непосредственно к сети на ее полное напряжение;
2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря;
3) пуск при пониженном напряжении цепи якоря.
прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых Ra относительно велико и поэтому при пуске процесс пуска длится не более 1—2 сек.
Самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений
Способы пуска двигателя постоянного тока
1. Прямой пуск — обмотка якоря подключается непосредственно к сети.
Ток
якоря двигателя определяется формулой 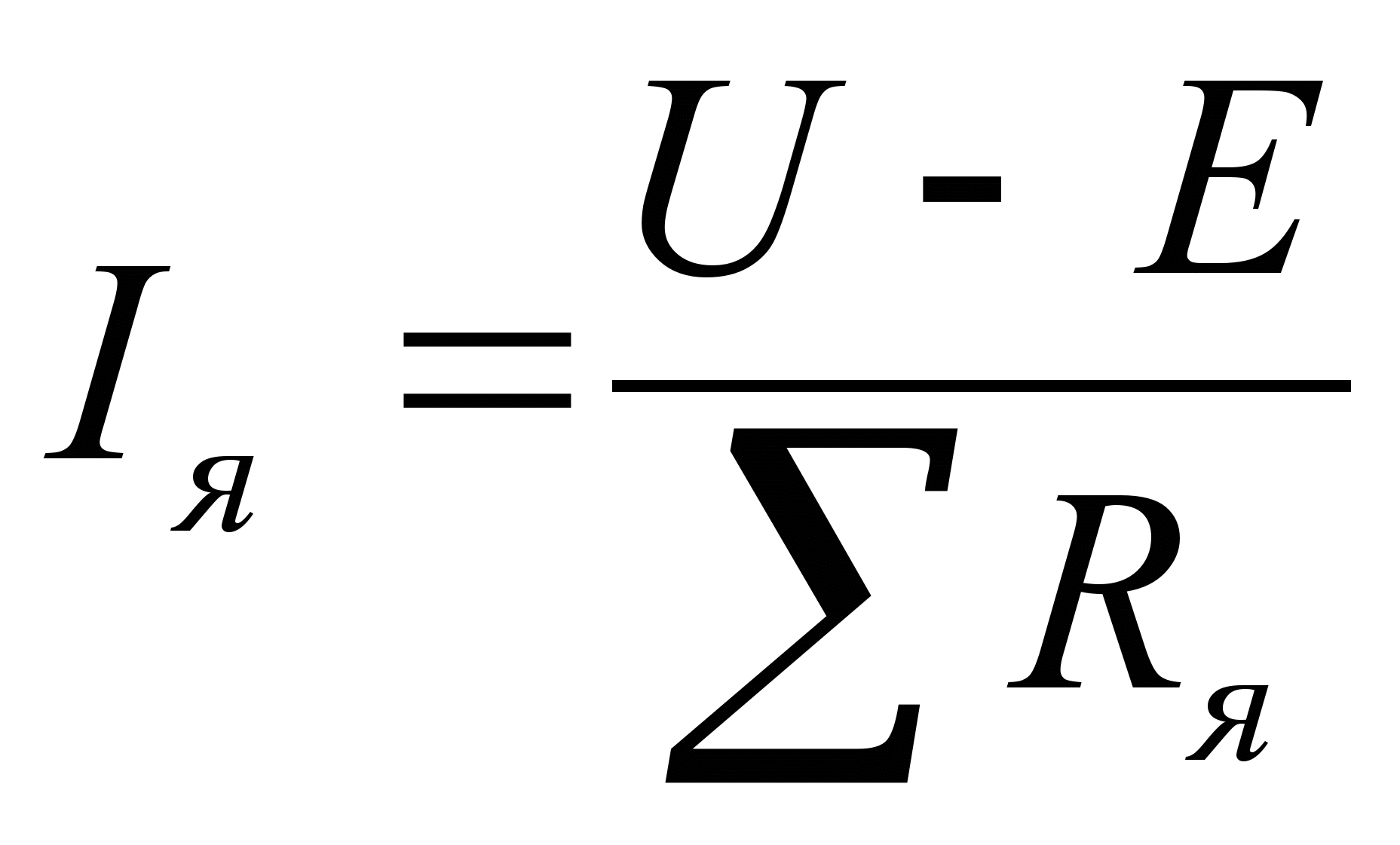 .
(4.1) Если считать, что при прямом
пуске значения напряжения питания
U и сопротивления якорной обмотки Rя остаются неизменными, то ток якоря
зависит от противо — ЭДС Е.
В начальный момент пуска якоря двигатель
неподвижен (=0)
и в его обмотке Е=0.Поэтому
при подключении к сети в обмотке возникает
пусковой ток
.
(4.1) Если считать, что при прямом
пуске значения напряжения питания
U и сопротивления якорной обмотки Rя остаются неизменными, то ток якоря
зависит от противо — ЭДС Е.
В начальный момент пуска якоря двигатель
неподвижен (=0)
и в его обмотке Е=0.Поэтому
при подключении к сети в обмотке возникает
пусковой ток  .
(4.2) Обычно сопротивление Rя невелико, особенно
у двигателей большой мощности, поэтому
значение пускового тока достигает 20
раз превышающих номинальный ток
двигателя.недопустимо
больших значений, в 10 При этом создается
опасность поломки вала машины и появляется
сильное искрение под щетками коллектора.
По этой причине такой пуск применяется
только для двигателей малой мощности,
у которых Rя относительно
велико.
.
(4.2) Обычно сопротивление Rя невелико, особенно
у двигателей большой мощности, поэтому
значение пускового тока достигает 20
раз превышающих номинальный ток
двигателя.недопустимо
больших значений, в 10 При этом создается
опасность поломки вала машины и появляется
сильное искрение под щетками коллектора.
По этой причине такой пуск применяется
только для двигателей малой мощности,
у которых Rя относительно
велико.
2)Реостатный пуск — в цепь якоря включается пусковой реостат для ограничения тока. В начальный момент пуска при =0 и Rп=мах ток якоря будет равен
 .
(4.3) Максимальное значение Rп подбирают так, чтобы для машин большой
и средней мощности ток якоря при пуске
.
(4.3) Максимальное значение Rп подбирают так, чтобы для машин большой
и средней мощности ток якоря при пуске  ,
а для машин малой мощности
,
а для машин малой мощности  .
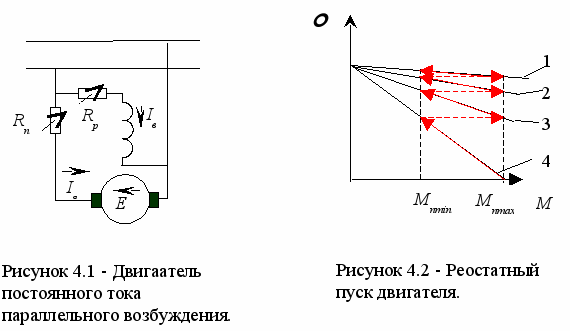
Рассмотрим процесс реостатного пуска
на примере двигателя с параллельным
возбуждением рис 4.1. В начальный
момент пуск осуществляется по реостатной
характеристике 4, соответствующей
максимальному значению сопротивления Rп,
при этом двигатель развивает максимальный
пусковой момент Мпmax .Регулировочный реостат Rр выводится так, чтобы Iв и Ф были максимальными. По мере разгона
момент двигателя уменьшается, так как
с увеличением скорости вращения ротора
растет и ЭДС Е,
а как следствие, уменьшается ток якоря,
определяющий его величину. При достижении
некоторого значения Мпmin часть сопротивления Rп выводится,
вследствие чего момент снова возрастает
до Мпmax , двигатель переходит на работу по
реостатной характеристике 3 и разгоняется
до значения Мпmin . Таким образом, уменьшая постепенно
сопротивление пускового реостата,
осуществляют разгон двигателя по
отдельным отрезкам реостатной
характеристики до выхода на естественную
характеристику 1.Средний вращающий
момент при пуске определяется из
выражения
.
Рассмотрим процесс реостатного пуска
на примере двигателя с параллельным
возбуждением рис 4.1. В начальный
момент пуск осуществляется по реостатной
характеристике 4, соответствующей
максимальному значению сопротивления Rп,
при этом двигатель развивает максимальный
пусковой момент Мпmax .Регулировочный реостат Rр выводится так, чтобы Iв и Ф были максимальными. По мере разгона
момент двигателя уменьшается, так как
с увеличением скорости вращения ротора
растет и ЭДС Е,
а как следствие, уменьшается ток якоря,
определяющий его величину. При достижении
некоторого значения Мпmin часть сопротивления Rп выводится,
вследствие чего момент снова возрастает
до Мпmax , двигатель переходит на работу по
реостатной характеристике 3 и разгоняется
до значения Мпmin . Таким образом, уменьшая постепенно
сопротивление пускового реостата,
осуществляют разгон двигателя по
отдельным отрезкам реостатной
характеристики до выхода на естественную
характеристику 1.Средний вращающий
момент при пуске определяется из
выражения  .
(4.4) двигатель при этом разгоняется
с некоторым постоянным ускорением.
.
(4.4) двигатель при этом разгоняется
с некоторым постоянным ускорением.
Аналогичный пуск возможен и для двигателей последовательного возбуждения. Количество ступеней пуска зависит от жесткости естественной характеристики и требований предъявляемых к плавности пуска. Пусковые реостаты рассчитываются на кратковременную работу под током.
В
реальных устройствах пуск осуществляется
автоматически. Микроконтроллер, по
з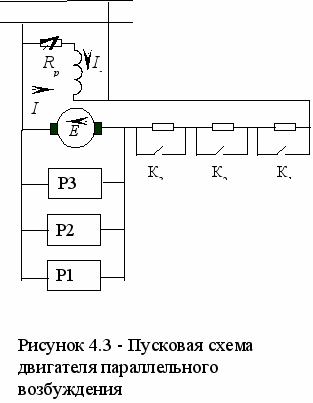 аданному
алгоритму, управляет коммутирующими
элементами (релейное управление),
отключая секции пускового реостата и
практически реализуя описанный выше
процесс.
аданному
алгоритму, управляет коммутирующими
элементами (релейное управление),
отключая секции пускового реостата и
практически реализуя описанный выше
процесс.
Алгоритм управления может быть построен с использованием трех основных принципов:
1) Принцип ЭДС
2) Принцип тока
3) Принцип времени.
Идею реализации данных принципов можно пояснить с помощью пусковой схемы на электромагнитных реле (что практически применялось до широкого внедрения микропроцессорных систем управления) рисунок 4.3. К якорю машины подключается параллельно ряд реле, которые с ростом скорости вращения, а значит, ЭДС, последовательно срабатывают и своими контактами выводят из работы секции пускового реостата, постепенно уменьшая сопротивление якорной цепи.
При использования принципа тока применяются последовательно включенные реле тока, которые дают команду через свои нормально замкнутые контакты на последовательное включение соответствующих контакторов Кi при снижении тока до заданного уровня.
Принцип времени предполагает применение реле времени, которые через расчетные уставки времени дают команду на шунтирование секций реостата.
4)Пуск путем плавного повышения питающего напряжения — пуск осуществляется от отдельного регулируемого источника питания. Применяется для двигателей большой мощности, где нецелесообразно применять громоздкие реостаты из-за значительных потерь электроэнергии.
3
Пуск двигателя постоянного тока с параллельным возбуждением.
Если двигатель включить в сеть напряжением U, то в начальный момент пуска якорь двигателя в силу инерции остается неподвижным (n==0) и противо-э.д.с. E отсутствует. Поэтому ток Iя в начальный момент пуска, определяемый формулой:
 |
 Схема включения двигателя параллельного возбуждения.
Схема включения двигателя параллельного возбуждения.
во много раз превышает ток Iя.н двигателя. Чтобы предохранить двигатель от чрезмерно большого пускового тока Iк, опасного для целости обмотки якоря и коллектора, последовательно с якорем включают пусковой реостат rп (рисунок по теме ). Благодаря этому ток якоря в начальный момент пуска
Так как продолжительность пуска невелика, то величину пускового тока можно допустить равной 1,2—2 Iя.н. Начальный пусковой момент двигателя, пропорциональный току якоря Iя.пуск,
при этом будет также превышать номинальный момент двигателя в 1,2—2 раза, т. е. Мпуск. нач.= (1,2—2) Мн (чем больше пусковой момент электродвигателя, тем при прочих равных условиях меньше продолжительность пуска).
По мере разгона двигателя индуктируемая в обмотке якоря противо-э.д.с. возрастает, что влечет за собой уменьшение тока якоря и снижение развиваемого двигателем вращающего момента. Для поддержания вращающего момента на определенном уровне многоступенчатый пусковой реостат постепенно выводится из цепи якоря. При достижении двигателем полной скорости пусковой реостат целиком выключается.
Дата добавления: 2016-06-09; просмотров: 3910;
Похожие статьи:
Пуск двигателей постоянного тока
Дата публикации: .
Категория: Машины постоянного тока.
При пуске двигателя в ход необходимо: 1) обеспечить надлежащий пусковой момент и условия для достижения необходимой скорости вращения; 2) предотвратить возникновение чрезмерного пускового тока, опасного для двигателя.
Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря подключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря.
Прямой пуск
При n = 0 также Eа = 0 и, согласно выражению (5), в статье «Общие сведения о двигателях постоянного тока»
В нормальных машинах Rа = 0,02 – 0,1, и поэтому при прямом пуске с U = Uн ток якоря недопустимо велик:
Iа = (5 – 10) Iн .
Вследствие этого прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых Rа относительно велико и поэтому при пуске Iа ≤ (4 – 6) Iн, а процесс пуска длится не более 1 – 2 с.
Пуск с помощью пускового реостата или пусковых сопротивлений

Рисунок 1. Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б)
Для двигателей с параллельным возбуждением самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений (рисунок 1).
При этом вместо выражения (5), в статье «Общие сведения о двигателях постоянного тока» имеем
 | (2) |
а в начальный момент пуска, при n = 0,
 | (3) |
где Rп – сопротивление пускового реостата, или пусковое сопротивление. Значение Rп подбирается так, чтобы в начальный момент пуска было Iа = (1,4 – 1,7) Iн [в малых машинах до (2,0 – 2,5) Iн].
Рассмотрим подробнее пуск двигателя параллельного возбуждения с помощью реостата (рисунок 1, а).
Перед пуском (t < 0) подвижный контакт П пускового реостата стоит на холостом контакте 0 и цепь двигателя разомкнута. В начальный момент пуска (t = 0) подвижный контакт П с помощью рукоятки переводится на контакт 1, и через якорь пойдет ток Iа, определяемый равенством (3). Цепь обмотки возбуждения ОВ подключается к неподвижной контактной дуге д, по которой скользит контакт П, чтобы во время пуска цепь возбуждения все время была под полным напряжением. Это необходимо для того, чтобы iв и Фδ при пуске были максимальными и постоянными, так как при этом, согласно выражению (8), в статье «Общие сведения о двигателях постоянного тока», при данных значениях Iа развивается наибольший момент М. С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rп.в = 0.
При положении контакта П пускового реостата на контакте 1 (t = 0) возникают токи Iа и iв, а так же момент М, и если М больше Мст, то двигатель придет во вращение и скорость n будет расти со значения n = 0 (рисунок 2). При этом в якоре будет индуктироваться электродвижущая сила (э. д. с.) Eа ∼ n и, согласно выражениям (2) и (8), представленных в статье «Общие сведения о двигателях постоянного тока», Iа и M, а также скорость нарастания n будут уменьшаться. Изменение этих величин при Mст = const происходит по экспоненциальному закону.
 |
| Рисунок 2. Зависимость Iа, M и n от времени при пуске двигателя |
Когда Iа достигнет значения Iа мин = (1,1 – 1,3) Iн, контакт П пускового реостата переведется на контакт 2. Вследствие уменьшения Rп ток Iа ввиду малой индуктивности цепи якоря почти мгновенно возрастет, M также увеличится, n будет расти быстрее и в результате увеличения Eа значения Iа и M снова будут уменьшаться (рисунок 2). Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигнет установившегося режима работы со значениями Iа и n, определяемыми условием M = Mст [смотрите равенства (8) и (9), в статье «Общие сведения о двигателях постоянного тока»].
При пуске на холостом ходу Mст = M0. Ток Iа = Iа0 в этом случае мал и составляет обычно 3 – 8 % от Iн.
Заштрихованные на рисунке 2 ординаты представляют собой, согласно выражению (2), представленного в статье «Общие сведения о двигателях постоянного тока», значения избыточного, или динамического, момента
Mдин = M – Mст ,
под воздействием которого происходит увеличение n.
Число ступеней пускового реостата и значения их сопротивлений рассчитываются таким образом, чтобы при надлежащих интервалах времени переключение ступеней максимальные и минимальные значения Iа на всех ступенях получилось одинаковыми.
По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током.
Остановка двигателя производится путем его отключения от сети с помощью рубильника или другого выключателя. Схема рисунка 1 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Применяются также несколько видоизмененные по сравнению с рисунком 1, а схемы пусковых реостатов, без контактной дуги д. Конец цепи возбуждения при этом можно присоединить, например, к контакту 2, и при работе двигателя последовательно с обмоткой возбуждения будут включены последние ступени реостата. Поскольку их сопротивление по сравнению с Rв = rв + Rр.в мало, то это не оказывает большого влияния на работу двигателя.
Автоматизировать переключение пускового реостата неудобно. Поэтому в автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рисунок 1, б), которые поочередно шунтируются контактами К1, К2, К3 автоматически работающих контакторов. Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1 – 2 ступени).
Ни в коем случае нельзя допускать разрыва цепи параллельного возбуждения.
В этом случае поток возбуждения исчезает ни сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако этот поток будет быстро уменьшаться и скорость n, согласно выражению (7), представленного в статье «Общие сведения о двигателях постоянного тока», будет сильно увеличиваться («разнос» двигателя). При этом [смотрите равенство 8, в статье «Общие сведения о двигателях постоянного тока»] ток якоря значительно возрастет и возникнет круговой огонь, вследствие чего возможно повреждение машины, и поэтому, в частности, в цепях возбуждения не ставят предохранителей и выключателей.
Пуск при пониженном напряжении цепи якоря
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения (рисунок 1), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Пуск двигателей постоянного тока
В начальный момент пуска двигателя якорь неподвижен и противо-э.д.с. и напряжение в якоре равна нулю.
Сопротивление цепи якоря невелико, поэтому пусковой ток превышает в 10 — 20 раз и более номинальный. Это может вызвать значительные электродинамические усилия в обмотке якоря и чрезмерный ее перегрев, поэтому пуск двигателя производят с помощью пусковых реостатов — активных сопротивлений, включаемых в цепь якоря. Двигатели мощностью до 1 кВт допускают прямой пуск.
Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи. Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Механические характеристики электродвигателей постоянного тока
Рассмотрим двигатель с параллельным возбуждением в установившемся режиме работы (рис. 11.14). Обмотка возбуждения подключена параллельно якорной обмотке.

 ,
откуда
,
откуда 
 (11.6)
(11.6)
Механической характеристикой двигателя называется зависимость частоты вращения якоря n2 от момента на валу M2 при U = const и Iв = const. Уравнение (11.6) является уравнением механической характеристики двигателя с параллельным возбуждением. Рис. 11.14
Эта характеристика является жесткой. С увеличением нагрузки частота вращения такого двигателя уменьшается в небольшой степени (рис. 11.15).
Н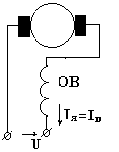 а
рисунке 11.16 изображен двигатель
последовательного возбуждения. Якорная
обмотка и обмотка возбуждения включены
последовательно.
а
рисунке 11.16 изображен двигатель
последовательного возбуждения. Якорная
обмотка и обмотка возбуждения включены
последовательно. 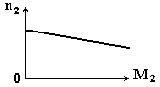 Рис.
11.15
Рис. 11.16
Рис.
11.15
Рис. 11.16
Ток возбуждения двигателя одновременно является током якоря. Магнитный поток индуктора пропорционален току якоря.

где k — коэффициент пропорциональности. Момент на валу двигателя пропорционален квадрату тока якоря.

откуда

Механическая
характеристика двигателя последовательного
возбуждения является мягкой (рис. 11.17).  Рис.
11.17
Рис.
11.17
Уравнение
механической характеристики двигателя
последовательного возбуждения выглядит
следующим образом:
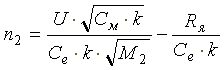
С увеличением нагрузки скорость двигателя резко падает. С уменьшением нагрузки на валу двигатель развивает очень большую частоту вращения. Говорят, что двигатель идет вразнос. Работа двигателя последовательного возбуждения без нагрузки недопустима. Двигатель смешанного возбуждения имеет механическую характеристику, представляющую собой нечто среднее между механическими характеристиками двигателя параллельного и последовательного возбуждения. Двигатели с параллельным возбуждением применяются для привода станков и различных механизмов, требующих широкой регулировки скорости. Двигатели с последовательным возбуждением применяются в качестве тяговых двигателей электровозов, трамваев и т.д.
Регулирование частоты вращения машин постоянного тока
В общем случае частота вращения двигателей постоянного тока определяется выражением
где U — напряжение, подводимое к якорю двигателя;1а — ток якоря; £Да— сумма сопротивлений якоря и всех последовательно
включенных обмоток; СЕ — коэффициент, зависящий от обмоточных данных двигателя; Ф — магнитный поток машины.
Из приведенного выражения следует, что частота вращения двигателя при неизменной нагрузке может быть изменена регулированием питающего напряжения U, включением последовательно с якорем дополнительного регулировочного резистора (изменение £.Ra) и изменением магнитного потока машины (изменением тока возбуждения). В практике применяются все три способа регулирования.
Регулирование частоты вращения изменением подводимого напряжения встречает трудности, связанные со сложностью пре-обра’зования напряжения постоянного тока. Для этой цели либо применяют статические преобразователи напряжения, либо питают двигатель от отдельного генератора постоянного тока, допускающего плавное регулирование напряжения (система генератор — двигатель). Такие системы применяют лишь для отдельных специальных приводов, требующих регулирования частоты вращения по сложной программе, например для главных двигателей прокатных станов.
Регулирование частоты вращения потоком является наиболее экономичным способом, так как потери в регулировочных резисторах, включаемых для этой цели последовательно с обмоткой возбуждения, невелики из-за малого тока возбуждения.
Однако этот способ позволяет лишь увеличивать частоту вращения двигателей по сравнению с номинальной. Такой способ регулирования предусмотрен для всех серийных двигателей постоянного тока.
Включение добавочного резистора в цепь якоря дает возможность плавно регулировать частоту вращения, но сопряжено с большими потерями в регулировочном реостате, по которому проходит полный ток нагрузки. Этот способ используется, например, для регулирования частоты вращения тяговых двигателей.
В современных системах регулирования частоты вращения двигателей постоянного тока применяются тиристорные схемы, позволяющие осуществить регулирование частоты вращения в широких пределах по заданной программе. Датчиками частоты вращения для осуществления обратной связи при регулировании могут быть тахогенера-торы, размещенные на валу якоря двигателя.
30