


Методика измерения линейного перемещения — СЕНСОРИКА-М
В статье описывается применение нашего датчика скорости и длины ИСД-5 в качестве датчика линейного перемещения.
Первичным измеряемым параметром является скорость объекта
- Линейное перемещение вычисляется как сумма ΔSi = ΔVi*Δti , при этом время между измерениями Δt =30 мс (при частоте измерений 33 Гц), т.е. значение скорости (и пути) обновляется каждые 30 мс.
- Частоту измерений значительно увеличить не удается, поскольку из общих принципов для точного измерения требуется некоторое время (его можно сократить, но соответственно ухудшится точность единичного измерения).
Промышленные применения: например необходимо контролировать линейное перемещение какого либо механического объекта относительно поверхности. Все вычисления линейного перемещения должны производиться относительно базовой точки контроллером без ОС, с жестким алгоритмом реального времени. При этом наиболее точным является перевод данных длины в непрерывную последовательность импульсов, частота которых жестко привязана к текущей измеренной скорости и эта частота обновляется каждые 30 мс.
Например, в контроллере выставлено, что скорости 1 м/с соответствует 1000 Гц импульсного выхода. За 1 с объект пройдет 1 м, соответственно, на каждый импульс приходится 1 мм перемещения. При 2 м/с выходная частота 2000 Гц и на каждый импульс опять приходится 1 мм. Т.е. для любой измеренной скорости выходная частота изменяется так, что всегда 1 имп = 1 мм. Это поясняется рис.1:
Рис.1. Изменение частоты импульсного сигнала (меандр) от измеренной скорости. Частота изменяется после очередного измерения скорости, но по достижении целого числа периодов предыдущего измерения, поэтому нет никаких скачков (дополнительных импульсов) при изменении частоты.
Здесь красная линия – реальная скорость, черные – измеренная скорость за предыдущие 30 мс.
Оценка погрешности измерений линейного перемещения из-за дискретности измерения скорости:
При переменной скорости ее нужно измерять чем чаще, тем лучше. Оценим, какая частота измерений достаточна (дальнейшее увеличение не приводит к увеличению точности отреза) исходя из критерия максимально физически возможного ускорения объекта. Пусть это будет 10 м/с2 (см. рис.2) Тогда за время 30 мс объект увеличит скорость на V=at = 0,3 м/с. Пусть при постоянной скорости 10 м/с мы измеряем перемещение за 2 измерения (за 0,06 с) при выставленном коэффициенте 1000 Гц/м/с. Получим 10000 имп/с *0,06с = 600 мм или по 300 мм на измерение. При ускорении объекта 10 м/с2 получим скорости, например, 9,7 и 10,3 м/с, соответственно частоты 9700 и 10300 Гц и число импульсов 291 + 309 = те же 600 мм. и переместится на S = at2/2 = 4,5 мм.
Рис.2. Перемещение объекта с постоянным ускорением 10 м/с2 и с переменным (пунктирные линии скорости).
То есть, при движении объекта с постоянным ускорением результат измерения линейного перемещения также не зависит от частоты измерения. Разумеется, при переменных ускорениях могут быть эффекты второго порядка нелинейности, например, при нарастании ускорения измеренное линейное перемещение немного занижается, а при нарастании замедления – завышается. Но, поскольку скорость перемещения колеблется относительно некоторой заданной для процесса, эти эффекты взаимно компенсируются, тем более на перемещениях в десятки метров. Практика показала, что частоты измерения 35 Гц (как сейчас) достаточно для практически всех применений (если не рассматривать импульсные процессы (ударные, с большими ускорениями и малыми временами)).
Таким образом, импульсный выход позволяет измерить линейное перемещение с практически любым разрешением (можно выставить и 0,1 мм/имп).
Как показывает практика работы с нашими датчиками ускорения движущихся объектов на которых они устанавливаются допустимо до 5 м/с2 в пределах паспортных данных по линейному перемещению.
Тема 12. Измерение линейной скорости движения летательных аппаратов
Информация о скорости полета необходима для успешного решения задач пилотирования и навигации.
Для летательного аппарата существует минимальная безопасная скорость полета, при которой крыло самолета развивает достаточную подъемную силу и обеспечивает устойчивый полет. Уменьшение скорости ниже безопасного предела приводит к потере подъемной силы и сваливанию самолета в штопор, т.е. к аварийной ситуации.
Измерение скорости необходимо и для навигации – определения положения самолета в пространстве и выбора рациональной траектории полета.
Самый простой метод измерения скорости полета применялся еще на самых первых летательных аппаратах и заключается он в измерении скоростного напора от набегающего на аппарат воздушного потока.
В соответствии с законами аэродинамики (законом Бернулли) если искусственно затормозить набегающий воздушный поток, это приведет к повышению давления за счет скоростного напора.
Простейший прибор для измерения скорости полета показан на рис.115.

Рис.115
Измерение скорости полета ЛА.
Если набегающий воздушный поток попадает в глухую полость, он затормаживается до скорости V=0. В результате давление в этой полости увеличивается по сравнению со статическим давлением окружающей среды РС на величину динамического (скоростного) напора
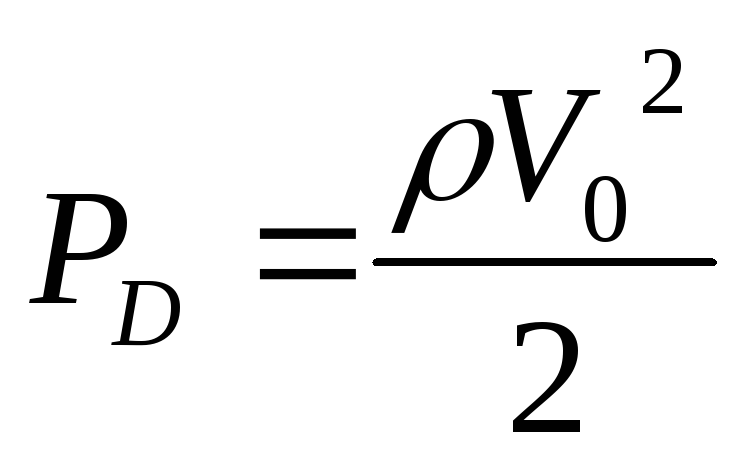 , (67)
, (67)где ρ – плотность воздуха, V0 – скорость набегающего потока (скорость полета).
Для определения скорости полета необходимо из полного давления заторможенного потока РС+РD вычесть статическое давление РС и вычислить скорость по формуле
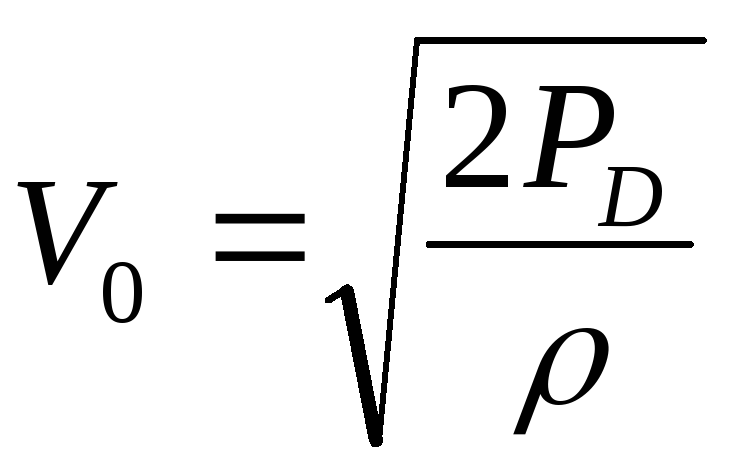
Поскольку в эту формулу входит плотность окружающего воздуха ρ, которая существенно зависит от высоты полета, необходимо эту плотность знать. Измерение плотности воздуха представляет сложную задачу. Гораздо более простая задача – измерение статического давления на высоте полета, а между изменением плотности и статического давления по высоте есть взаимосвязь. На рис 116 показаны зависимость плотности и статического давления от высоты для «стандартной атмосферы» /4 c120/.

Рис.116
Свойства стандартной атмосферы.
Использовав близость зависимости РС(Н) и ρ(Н) были созданы указатели скорости полета, измеряющие статическое давление и полное давление заторможенного потока, в которых реализовывались соответствующие формулы.
Для приема указанных давлений используется ПВД (приемник воздушного давления) схематически показанный на рис.117.

Рис.117
Приемник воздушного давления.
Трубка ПВД устанавливается навстречу набегающему потоку и выносится на некоторое расстояние от передней кромки крыла, чтобы измерять параметры невозмущенного потока. Центральный канал открыт навстречу потоку и в нем формируется полное давление. Вокруг центрального канала расположена цилиндрическая полость, в наружной стенке которой есть отверстия параллельные воздушному потоку. В этом случае торможения потока не происходит и в этой полости давление равно статическому давлению на высоте полета. По трубкам полное и статическое давление передаются в прибор –
Подъемная сила крыла зависит от скоростного напора РD, который при одной и той же воздушной скорости изменяется от высоты полета (из-за изменения ρ). Поэтому минимальная допустимая скорость полета (скорость сваливания в штопор) тоже зависит от высоты полета. Так при полете на высоте 10000 метров со скоростью 800 км/час подъемная сила крыла будет такой же, как при полете вблизи поверхности земли со скоростью 464 км/час. Для обеспечения безопасности полета пилоту необходимо знать, каким запасом подъемной силы крыла он располагает в реальных условиях полета и не может ли наступить режим сваливания в штопор.
Для облегчения пилоту решения этой задачи кроме воздушной скорости определяется еще условная индикаторная скорость полета. Индикаторная скорость показывает, при какой скорости полета вблизи земли крыло самолета имеет такую же подъемную силу, как в реальных условиях полета. Были разработаны комбинированные указатели скорости (КУС), имеющие две стрелки. На одной и той же шкале прибора одна стрелка показывает воздушную, а другая индикаторную скорость полета (рис. 118). Для правильной оценки режима полета в окошке на шкале прибора отображается число Маха (отношение скорости полета к скорости звука на данной высоте).

Рис. 118.
Комбинированный указатель скорости полета.
Для решения навигационной задачи одной воздушной скорости недостаточно, т.к. бортовой измеритель воздушной скорости показывает скорость перемещения самолета относительно окружающего воздуха. Относительно поверхности Земли самолет перемещается еще и вместе с воздухом со скоростью ветра на высоте полета. Для решения навигационной задачи необходимо знать
 (68)
(68)
Информацию о скорости ветра штурман получает от авиационных метеослужб перед вылетом и уточняет в процессе полета. Для получения точных данных о направлении и скорости ветра по высотам на трассе полета необходимо иметь сложную разветвленную сеть метеостанций и быстродействующую оперативную системы передачи и обработки данных.
Поэтому необходимо найти способы автономного измерения путевой скорости с помощью бортовой аппаратуры.
Измерение линейных и угловых скоростей
Скорость можно рассчитать, измерив перемещение и время и зная характер движения. Например, скорость самолета можно определить по расстоянию между метками на экране радиолокатора и секундомеру. Однако нужны и такие приборы, которые непосредственно выдают информацию о скорости в любой момент времени.
Прибор, измеряющий линейную скорость, называется спидометром, а прибор, измеряющий угловую скорость, – тахометром. Чаще всего при измерении линейной скорости линейное движение сначала преобразуют во вращательное (например, привод от колеса в транспорте), а затем уже измеряют тахометром угловую скорость этого вращательного движения. Рассмотрим вначале конструкции тахометров. Задача тахометра – преобразовать угловую скорость вращения в определенное положение стрелки-указателя относительно циферблата. Простейший тахометр – центробежный (рис. ,14, а). При вращении вала 1 грузы



а б с
Рис. 14. Тахометры: а – центробежный, б – индукционный, в – индукционный тахометр с прямолинейной шкалой
На рис. 14 обозначено: 1 – вал, 2 – грузы, 3 – пружина, 4 – указатель, 5 – немагнитная металлическая чашка, 6 – круглый циферблат, 7 – шкала со щелью.
При
вращении вала 1 грузы
2 расходятся
под действием центробежной силы инерции 

где  –
некоторый коэффициент,k
–
жесткость пружины, L
–
сжатие пружины и одновременно показания
прибора. Таким образом, шкала нелинейна
(L
–
некоторый коэффициент,k
–
жесткость пружины, L
–
сжатие пружины и одновременно показания
прибора. Таким образом, шкала нелинейна
(L
 ).
Это недостаток центробежного тахометра.
).
Это недостаток центробежного тахометра. Спидометры
на транспорте обычно построены по
принципу индукционного (магнитного)
тахометра (рис. 14, б):
на вращающийся вал 1
насажен постоянный магнит, который
вращается внутри немагнитной
(алюминиевой) чашки 5
(картушки), не касаясь ее стенок. Но в
этих стенках наводятся индукционные
токи, которые в соответствии с правилом
Ленца препятствуют вращению магнита.
От этого сама чашка в соответствии с
третьим законом Ньютона поворачивается,
сжимая пружину 3. С
осью чашки скреплена стрелка 4.
ЭДС
по закону Фарадея пропорциональна
скорости изменения магнитного потока,
а она пропорциональна угловой скорости  :
:

 .
.
С другой стороны, токи в картушке i ~ Е, а сила, действующая со стороны магнита (сила Ампера), пропорциональна магнитной индукции магнита В и i:

т.
e. L ~ (шкала индукционного тахометра линейна).
(шкала индукционного тахометра линейна).
В современном приборостроении от круглых шкал перешли к прямоугольным. Картушку делают сильно вытянутой, окрашивают часть ее, отделенную спиральной границей, в красный цвет и ставят ее за шкалой со щелью 7 (рис. 14, б). Чем больше поворот картушки, тем длиннее красный указатель.
Обычно от того же вала, который идет к спидометру, работает еще и механический счетчик полного числа оборотов (счетчик пройденного пути), монтируемый обычно вместе со спидометром на автомобиле, мотоцикле и т. д. Не всегда удобно протягивать вал от вращающихся деталей к щиту управления. В этих случаях используются дистанционные передачи типа сельсина или тахогенератора (вращающийся от вала постоянный магнит наводит токи в трехполюсном статоре, как в сельсине, которые по трехпроводной линии передаются на щит управления; здесь они направляются в такой же трехполюсный статор, внутри которого от этих токов приходит во вращение короткозамкнутый ротор, как в асинхронном двигателе).
Не всегда допустим механический контакт спидометра с вращающейся деталью. В этих случаях используют бесконтактные тахометры. Если деталь неоднородна, т. е. в ней есть отверстия или зубцы, то они могут прерывать луч света, идущий от осветителя к фотоэлементу. Получается переменный ток, частоту которого измеряют частотомером. Так устроен оптический тахометр. В радиоактивном тахометре вместо луча света используются гамма- или бета-лучи. Еще один бесконтактный тахометр основан на стробоскопическом эффекте. Главной частью стробоскопического тахометра является импульсный генератор переменной частоты, от которого питается лампа-вспышка, освещающая вращающуюся деталь с какой-либо меткой. При совпадении частоты вспышек и частоты вращения метка кажется остановившейся. Показания снимают со шкалы генератора, указывающей частоту.
ИЗМЕРИТЕЛЬ ЛИНЕЙНОЙ СКОРОСТИ | sibac.info
ИЗМЕРИТЕЛЬ ЛИНЕЙНОЙ СКОРОСТИ
Главчев Михаил Дмитриевич
студент 1 курса, кафедра технико-технологических дисциплин ВлГУ, РФ, г. Владимир
Шарыгин Лев Николаевич
научный руководитель, канд. техн. наук, профессор ВлГУ, РФ, г. Владимир
На этапе финальных операций по отработке и юстировке многих технических устройств возникает задача измерения скорости движения элемента машины на линейном участке его траектории.
Известные устройства используют различные первичные преобразователи. В датчике скорости [4] применен емкостной элемент. В датчике скорости [3] используется элемент Холла. Наибольшее применение получили первичные преобразователи магнитоэлектрического типа [1, 2, 5], чаще всего с многополюсными магнитами. Основным недостатком конструкции известных датчиков является низкая технологичность, которая обусловлена сложностью магнитных цепей. Кроме того, обычно преобразование сигнала в датчике организовано в аналоговой форме, что снижает точность измерения.
Предлагаем основные технические решения по созданию измерителя линейной скорости, в которых учтены недостатки известных устройств — рис. 1—3. Измеритель линейной скорости составлен из датчика (рис. 1) и электронного блока (рис. 2).
Основу датчика составляет магнитная цепь из П-образного магнитопровода 1 и постоянного магнита 2. На крайних участках магнитопровода размещены две одинаковые электрические катушки 3 и 4. На подвижном элементе исследуемого устройства закрепляют магнитопроводную полоску 5. Обычно полоску 5 выполняют гибкой и крепят на подвижном элементе исследуемого устройства с помощью клея. Для эффективной работы датчика длина полоски должна превышать расстояние между крайними участками магнитопровода и постоянного магнита.
Рассмотрим движение полоски слева направо по стрелке V+. В исходном положении выделим два участка распространения магнитного потока Φ — участок магнитопровода длиной lm и участок зазора длиной l3. Магнитные сопротивления этих участков
Rм= и R3=
и R3= , (1)
, (1)
где: Sm, S3 — сечения участков;
 =
= ;
;
µ — относительная магнитная проницаемость материала магнитопровода
µ0 — магнитная проницаемость вакуума. Это значение принимают для воздуха.
Учитывая, что µ>>µ0 можно пренебречь магнитным сопротивлением магнитопровода, тогда магнитный поток, пронизывающий катушку составит
Φ , (2)
, (2)
где: Br — индукция остаточного намагничивания постоянного магнита 2.

Рисунок 1.
Начиная с положения I полоски начинает уменьшаться l3, что приводит к росту магнитного потока Φ. В положении II l3=2Δ. Следует обратить внимание, что полоска движется по прямой линии, сохраняя исходную настройку Δ, а на рис. 1 для наглядности отдельные положения смещены. После прохождения положения II l3 будет увеличиваться, что обеспечит уменьшение магнитного потока Φ. В положении III он примет исходное значение. Таким образом, за время движения полоски от положения I до положения III в обмотке катушки 3 индуцируется импульсная ЭДС
 (3)
(3)
Начиная с положения III полоски до положения V оба магнитных потока системы равны исходным значениям. Далее процесс повторяется на втором зазоре — положения V и VI, где снова, теперь уже на катушке 4 индуцируется импульсная ЭДС. Следовательно при прохождении полоской от положения I до положения VI будет наведено два разнесенных по времени импульса ЭДС — сначала на катушке 3 затем на катушке 4.
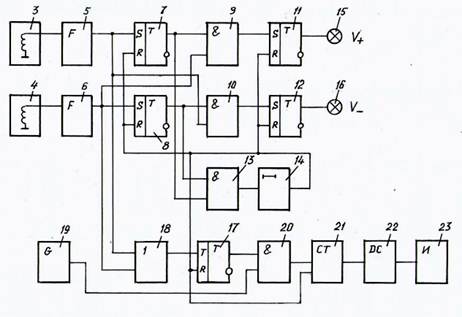
Рисунок 2. Функциональная схема электронного блока
Обратимся к устройству электронного блока — рис. 2. Крутизна фронтов импульсной ЭДС невелика (определяется скоростью изменения l3), поэтому предварительно необходимо формирователями 6, 7 привести форму импульсов к типовой, то есть прямоугольной. Схемотехнически формирователи могут быть построены по схеме усилителя-ограничителя или схеме триггера Шмидта. Задачей электронного блока является получение цифрового и аналогового значений скорости, а также направления (знака) движения измеряемого элемента объекта исследований.
Рассмотрим сначала цепь формирования знака скорости. Имеются два RS-триггера 7, 8, которые устанавливаются в единичное состояние импульсами формирователей 5, 6. Выделение импульса знака скорости осуществляется конъюнкторами 9, 10, а длительность свечения индикаторов знака (светодиодов) — RS-триггерами 11, 12. Импульс сброса триггеров формируется из выходных потенциалов триггеров 7, 8 конъюнктором 13 и сдвигается во времени линией задержки 14. Работу этой цепи удобно проследить по эпюрам напряжений рис. 3. Если полоска 5 (см. рис. 1) движется со скоростью V+ то формирователи дают эпюру UF. Импульс формирователя 5 (значит импульс катушки 3) устанавливает в единичное состояние триггер 7, соответственно импульс F6 — триггер 8. Эпюры напряжений на выходе триггеров 7, 8 — U7, U8. Импульс F6 появится на выходе конъюнктора 9 тогда, когда предварительно сработает триггер 7 от импульса F5, лишь потом появится импульс от F6. Импульс на выходе конъюнктора 9 опрокинет триггер 11, который обеспечит время свечения индикатора V+. При скорости V— ситуация будет обратная — сначала сработает конъюнктор 10 и триггер 12. В процессе измерения будет наблюдаться мерцание соответствующего индикатора 15 или 16 знака скорости.

Рисунок 3. Эпюры напряжений на элементах функциональной схемы
Цепь измерения величины скорости цифровая. Измерение скорости основано на измерении времени движения полоски на фиксированной датчиком базовой длине l, равной расстоянию между положениями I и V полоски, т. е.
 , (4)
, (4)
где: tl — время движения полоски на базовой длине.
Заметим, что время tl соответствует временному расстоянию между передними фронтами импульсов формирователей 6, 7. Это значит, что длина полоски не влияет на формирование измеряемого интервала tl. Этот интервал формируется счетным триггером 17, а управление триггером осуществляется через дизъюнктор 18 импульсами формирователей 6, 7. Необходимо подчеркнуть, что очередность поступления управляющих импульсов не имеет значения, следовательно не имеет значения и знак скорости (V+ или V—). Длительность временного интервала tl на выходе счетного триггера 17 измеряется с помощью импульсов генератора опорной частоты 19, которые за интервал tl через конъюнктор 20 заполняют счетчик 21. Записанное в счетчик количество импульсов переводится в десятичный код дешифратором 22 и отражается на индикаторе 23. Состояние счетчика 21 обнуляется по обшей шине сброса.
Таким образом в предлагаемом измерители скорости датчик имеет предельно простую конструкцию, электронный блок построен на типовых элементах электроники, что позволяет минимизировать себестоимость изделия.
Список литературы:
1.Датчик измерения скорости. Патент RU28255U1, МПК G01P 3/48.Опубл.10.03.2003.
2.Датчик измерения скорости. Патент RU25601U1, МПК G01P 3/48.Опубл.10.10.2002.
3.Датчик скорости. Патент RU10262U1, МПК G01F 3/44.Опубл.16.06.1999.
4.Датчик скорости. Заявка на изобретение RU2001104617A, МПК G01P 3/50.Опубл.10.04.2003.
5.Соломатин В.И. Бесконтактные измерители линейных и угловых скоростей. М.: энергия, 1974. — 530 с.
2.1 Назначение датчиков скорости
СОДЕРЖАНИЕ
2.1 Назначение датчиков скорости
2.2 Схема датчиков скорости
2.3 Классификация датчиков скорости
К общепромышленным приборам для измерения параметров движения относятся датчики скорости, применяемые при исследованиях, испытаниях и эксплуатации механизмов машин и сооружений.
Система, предназначенная для сушки твердых сыпучих материалов, предусматривает наличие датчика скорости для определения вращения барабана. Так как подача пара в барабан регулируется в зависимости от измеряемой влажности выходного продукта и зависит от производительности сушилки при различных скоростях барабана; скорость испарения на барабане также зависит от скорости самого барабана.
Основываясь на выше перечисленном, данный датчик скорости по функциональным особенностям структуре относится к электрической ветви государственной системы приборов (ГСП).
При рассмотрении датчиков для измерения скорости необходимо различать датчики линейной скорости и датчики угловой. Но так как основной задачей датчика скорости нашей системы является определение скорости вращения барабана, то мы будем рассматривать датчики угловой скорости (тахометры).
Тахометр – это устройство, предназначенное для измерения частоты вращения, подсчета числа оборотов за заданный промежуток времени.
2.3 Классификация датчиков скорости
В зависимости от вида движения объекта различают:
— датчики линейной скорости;
— датчики угловой скорости.
2.3.1 Датчики линейной скорости
Приборы для измерения скорости могут быть основаны на преобразовании поступательной скорости в угловую и на использовании явления магнитной индукции. Таким образом, по принципу действия датчики линейной скорости можно классифицировать следующим образом:
— индукционный датчик скорости при малых перемещениях;
— индукционный датчик скорости при больших перемещениях;
— тахогенераторы.
Индукционный датчик скорости при малых перемещениях (рис.1) состоит из цилиндрического пустотелого магнита, неподвижно укрепленного в основании и снабженного торцовыми башмаками в форме шайб, сквозь центральные отверстия которых проходит сердечник, несущий две катушки. Сердечник перемещается в цилиндрических направляющих. Возможно также применение направляющих без зазоров и трения — на плоских пружинах. Катушки соединены последовательно таким образом, чтобы их э.д.с., возникающие при перемещениях, суммировались.
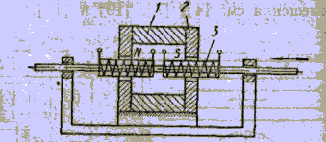
Рисунок 1: 1-постоянный магнит; 2-полюсной башмак;
3-сердечники с обмоткой.
Допустимый ход сердечника при измерении и требуемая длина намотки катушек определяются размерами магнита.
Благодаря высокой чувствительности датчика измерение возможно без применения усилителей. При чувствительности шлейфа 0,07 ма/мм отклонение на записи при измеряемой скорости 1 см/сек достигает 12 мм.
Индуктивный датчик скорости при больших перемещениях (рис.2). Перемещение детали, скорость которой измеряется, сообщается постоянному подковообразному магниту, между полюсами которого на двух параллельных сердечниках, набранных из тонких полосок трансформаторного железа, уложена плотно, виток к витку, однослойная обмотка из медного эмалированного провода диаметром 0,2 мм.
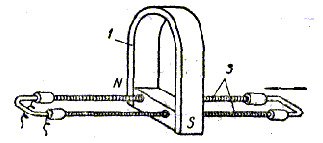
Рисунок 2: 1-постоянный магнит; 2-полюсной башмак;
3-сердечники с обмоткой.
Постоянство расстояния обмотки до полюсов магнита при движении достигается с помощью немагнитной вставки из эбонита или текстолита, которая прикреплена к магниту и скользит по обмотке.
Для защиты от перетирания на обмотку кладется копировальная бумага и надевается виниловый чулок.
Длина обмотки должна быть на 15—20 см больше хода магнита. Характеристика датчика линейная.
Тахогенератор преобразует поступательную скорость в угловую, шкала которого проградуирована в единицах поступательной скорости.
способ измерения линейной скорости — патент РФ 2124210
Способ предназначен для измерения линейной скорости движения тел, осуществляющих перемещение в пространстве: космическом, воздушном, водном. Способ позволяет определять линейную скорость движения тел по отношению к стоячей электромагнитной волне на перемещениях, меньших четверти длины электромагнитной волны. Способ заключается в создании стоячей электромагнитной волны двумя направленными навстречу друг другу вдоль одной прямой цугами когерентных электромагнитных волн, поляризованных в одной плоскости. При движении тела вдоль стоячей волны измеряют максимальную интенсивность пучности образовавшейся стоячей волны. Измеряют время, по истечении которого достигают некоторой интенсивности стоячей волны, которую также измеряют. По полученным интенсивностям, времени и длине волны определяют искомую скорость. 1 ил. Изобретение относится к области измерений линейной скорости тел, осуществляющих перемещение тел в пространстве: космическом, воздушном, водном и т. п. — и может быть использовано в тех областях науки и техники, где требуется определение линейной скорости. Известен способ определения скорости движения тел, основанный на эффекте Доплера, заключающийся в том, что испускается два цуга когерентных волн, один из которых используется в качестве опорного и связанного с условно-неподвижным вещественным телом отсчета, а другой используется в качестве зондирующего, который после отражения от движущегося тела складывается с опорным. После детектирования результата сложения выделяется разностная частота («доплеровское смещение»), которая является мерой скорости движения тела (см. Физика быстропротекающих процессов. Под ред. Н.А. Златина. — М.: Мир, 1971, с. 383 — 385). Недостатком данного способа является привязка к условно-неподвижному вещественному телу отсчета и невозможность определения скорости движения тела при отсутствии первого. Известен также способ измерения линейной скорости движения тела, заключающийся в том, что два когерентных пучка непрерывных электромагнитных волн излучаются навстречу друг другу вдоль одной прямой в вакууме (или в воздухе) с последующим разделением на две составляющих каждого. Две первых составляющих, продолжая распространяться в том же направлении, складываются на полупрозрачной пластинке, создавая интерференционную картину. Две вторые составляющие изменяют свое направление и попадают в замедляющую систему с высоким показателем преломления, ограниченной полупрозрачными пластинами, на которых создаются интерференционные картины. При ускоренном движении тела, с которым связано измерительное устройство, происходит изменение частот колебаний, прошедших через среду с высоким показателем преломления, и изменение частоты колебаний биений электромагнитных волн, распространяющихся в вакууме (или в воздухе). По разности этих изменений определяют приращение линейной скорости (см. SU, а.с. 1760456, G 01 P 3/36, 1992). Недостатком данного способа является невозможность определения линейной скорости равномерного движения тела. Целью настоящего изобретения является расширение технологических возможностей способа путем обеспечения возможности определения линейной скорости равномерного движения тела на перемещениях, меньших четверти длины электромагнитной волн. Поставленная цель достигается тем, что в известном способе, заключающемся в создании стоячей электромагнитной волны двумя направленными навстречу друг другу вдоль одной прямой цугами когерентных электромагнитных волн, поляризованных в одной плоскости, при движении тела вдоль стоячей волны измеряют максимальную интенсивность в какой-либо пучности стоячей волны и далее измеряют время, по истечении которого при перемещении не более чем на /4 от точки максимума пучности измеряют интенсивность стоячей волны. После чего линейную скорость определяют по формуле:v = (arccos2(I/I0))/2t,
где
v — линейная скорость движения тела относительно стоячей электромагнитной волны;
— длина электромагнитной волны;
I0 -максимальная интенсивность стоячей электромагнитной волны в пучности;
I — интенсивность стоячей электромагнитной волны по истечении времени t.
В предлагаемом способе определение линейной скорости движения тела осуществляется по результатам измерения двух интенсивностей стоячей волны на интервале от максимального значения до нуля, отстоящих друг от друга на расстоянии не более четверти длины электромагнитной волны проходимым телом за некоторое измеряемое время вдоль стоячей волны. Так как стоячая электромагнитная волна в однородном пространстве располагается линейно и распределение интенсивности в пространстве осуществляется однозначно по гармоническому закону, то определение линейной скорости движения тела при его линейном перемещении вдоль стоячей электромагнитной волны предлагаемым способом может быть осуществлено на расстояниях, меньших четверти длины волны как при равномерном, так и ускоренном движении. В то время как в известном способе определение изменения линейной скорости движения тела осуществляется через изменение разности изменения частот: колебаний, прошедших через среду с высоким показателем преломления, и колебаний биений электромагнитных волн, распространяющихся в вакууме (или в воздухе), — и невозможно определение скорости равномерного движения тела. На чертеже представлена схема устройства, реализующего предлагаемый способ. Устройство содержит генератор гармонических колебаний 1, выход которого связан с излучателями электромагнитных колебаний 2, испускающих цуги электромагнитных волн, образующих стоячую электромагнитную волну 3, которую испускает антенна 4, связанная с приемником электромагнитных волн 5, выход которого подключен к входу измерителя интенсивности электромагнитного поля 6, первый выход которого соединен со стартовым входом, а второй с входом «Стоп» измерителя интервалов времени 7, причем последние четыре блока размещены и жестко связаны с движущимся со скоростью v телом 8 в направлении X. Реализация предлагаемого способа осуществляется следующим образом. При включении генератор гармонических колебаний 1 начинает вырабатывать гармонические электрические колебания, под действием которых излучатели электромагнитных колебаний 2 начинают одновременно излучать навстречу друг другу вдоль одной прямой X цуги когерентных электромагнитных волн, которые при наложении образуют стоячую электромагнитную волну 3, описываемую уравнением:
(X,t) = Acos(2X/)cos(t+), (1)
где
(X,t) — смещение;
A — амплитуда;
— длина электромагнитной волны;
X — расстояние от излучателя до точки, в которой определяется смещение;
— циклическая частота электромагнитных колебаний;
t — время;
— начальная фаза. Так как интенсивность электромагнитной волны I пропорциональна квадрату амплитуды, то из (1) следует, что закон изменения интенсивности стоячей электромагнитной волны будет описываться уравнением:
I = I0cos2(2X/)cos2(t+), (2)
где
I0cos2(2X/) — выражение, описывающее огибающую стоячей волны. Когда антенна 4 пересекает максимум пучности стоячей волны, интенсивность в котором
I = I0cos2(2X1/), (3)
в ней формируется импульс тока, пропорциональный I, который усиливается приемником электромагнитных колебаний 5 и подается на вход измерителя интенсивности электромагнитного поля 6, с первого выхода которого на стартовый вход измерителя интервалов времени 7 поступает сигнал, запускающий отсчет времени. После того, как тело 8 проходит некоторое расстояние
X = X2-X1 (4)
не более /4, соответствующее расстоянию между максимумом пучности и узлом стоячей волны, измеритель интенсивности регистрирует некоторое значение интенсивности стоячей электромагнитной волны
I = I0cos2(2X2/) (5),
в соответствие которому на втором выходе измерителя интенсивности электромагнитного поля 6 появляется сигнал, поступающий на вход «Стоп» измерителя интервалов времени 7, прекращая счет времени. В результате измеритель интервалов времени 7 регистрирует время t, которое потребовалось телу 8, чтобы преодолеть расстояние от точки X1 до точки X2. Если из (3) и (5) выразим X1 и X2:
и подставим в (4), то получим
Тогда линейная скорость, которую имело движущееся тело 8 по отношению к стоячей электромагнитной волне, будет
у
ФОРМУЛА ИЗОБРЕТЕНИЯ
Способ измерения линейной скорости движения тел, заключающийся в создании стоячей электромагнитной волны двумя направленными навстречу друг другу вдоль одной прямой цугами когерентных электромагнитных волн, поляризованных в одной плоскости, отличающийся тем, что при движении тела вдоль стоячей электромагнитной волны измеряют ее максимальную интенсивность в пучности, измеряют интенсивность стоячей электромагнитной волны на расстоянии не более /4 от максимума пучности с помощью устройства, жестко связанного с телом, и измеряют время прохождения телом этого расстояния, а линейную скорость определяют по формуле:где V — линейная скорость движения тела относительно стоячей электромагнитной волны;
— длина электромагнитной волны;
Jo — максимальная интенсивность стоячей электромагнитной волны в пучности;
J — интенсивность стоячей электромагнитной волны по истечении времени t.р
Тема 13. Измерение линейных ускорений
Проблема измерения линейных ускорений занимает особое место при создании информационных устройств. Перемещение и скорость — величины всегда относительные, для которых необходимо указывать начало отсчета в той системе координат, в которой проводится измерение. Ускорение есть величина абсолютная, независимая от выбора системы координат. Для измерения линейных ускорений применяются датчики линейных ускорений (акселерометры).
Во всех акселерометрах присутствует инерционная масса, реагирующая на действие ускорения. По количеству измеряемых компонент вектора линейного ускорения датчики могут быть одно- двух- и трехосные, измеряющие, соответственно, одну, две или три компоненты вектора ускорения. Здесь рассматриваются простейшие – одноосные акселерометры. В этих акселерометрах инерционная масса имеет только одну степень свободы – в направлении измеряемой компоненты ускорения.
По конструкции одноосные датчики линейных ускорений могут быть осевыми и маятниковыми.
По способу организации усилия противодействующего силе инерции действующей на инерционную массу акселерометры подразделяются на простые (пружинные) и компенсационные.
Простой осевой акселерометр, показанный на рис.125, содержит инерционную массу (1), которая может перемещаться по направляющей (2) только вдоль одной оси. Инерционная масса связана с основанием прибора (3) через пружину (4) и демпфер (5). Для измерения перемещения инерционной массы используется датчик линейных перемещений (6), например потенциометрический.

Рис.125.
Схема простого осевого акселерометра.
Составим уравнение движения инерционной массы акселерометра. Предположим, что основание датчика, жестко связанное с корпусом объекта, движется в направление оси х с ускорением WX. В соответствии с законом Ньютона
 (74)
(74)
Здесь 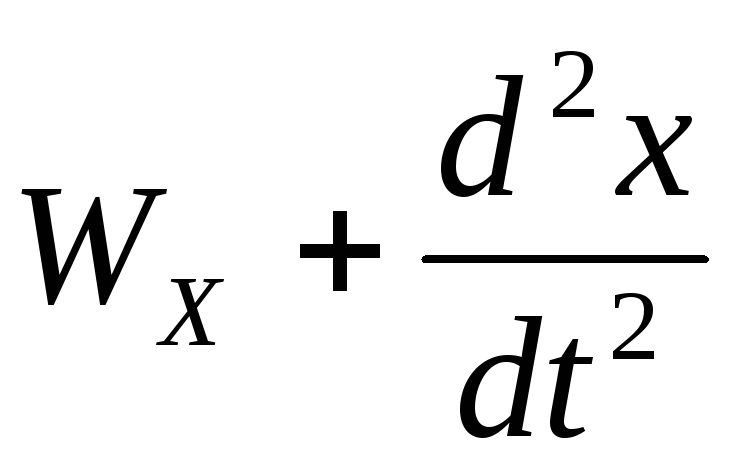 — абсолютное ускорение инерционной
массы, состоящее из абсолютного ускорения
основанияWX и относительного ускорения груза
— абсолютное ускорение инерционной
массы, состоящее из абсолютного ускорения
основанияWX и относительного ускорения груза  ,
,  –
сила противодействия пружины,
–
сила противодействия пружины, 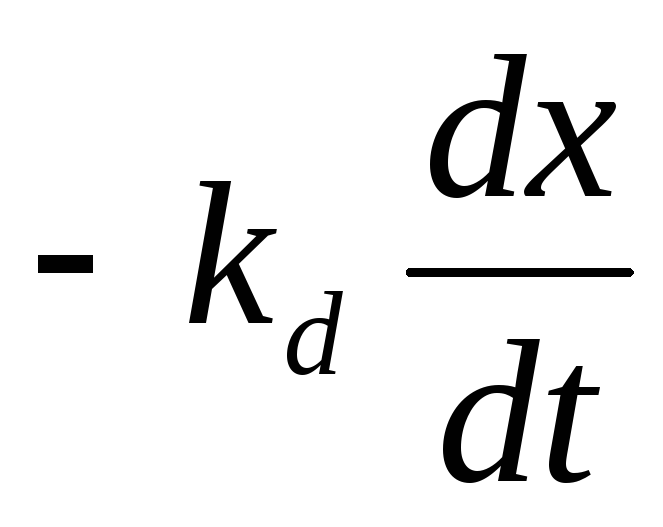 — сила сопротивления демпфера,FВОЗМ – остальные
действующие силы.
— сила сопротивления демпфера,FВОЗМ – остальные
действующие силы.
Выражение (74) можно представить в виде
 (75)
(75)
Получено уравнение движения инерционной массы при действии ускорения основания. На основе этого уравнения можно составить передаточную функцию
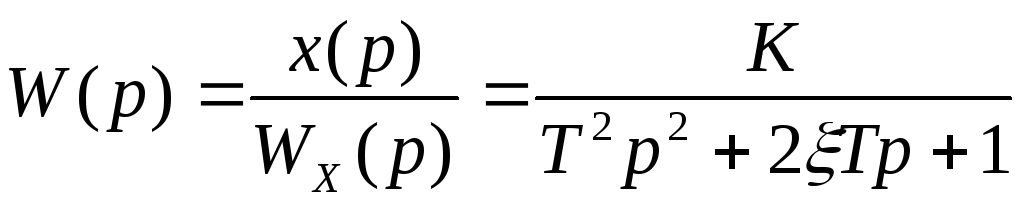 , (76)
, (76)
где К=-m/c, T2=m/c, 2ξT=kd/c.
Из уравнения (75) следует, что при ускорении основания в положительном направлении (WX>0) груз смещается в отрицательном направлении. Переходный процесс перемещения груза под действием постоянного ускорения показан на рис.126.
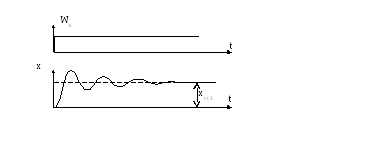
Рис.126.
Переходный процесс осевого акселерометра.
Установившееся значение перемещения груза
 (77)
(77)
Требуемую собственную частоту колебаний Ω0=1/Т и декремент затухания ξ при конструировании датчика можно обеспечить выбором параметров m, c и kd.
Существенный элемент конструкции датчика линейных ускорений – демпфер, обеспечивающий затухание колебаний инерционной массы. Демпфер может быть пневматический, гидравлический, магнитоэлектрический /8/.
Из неучтенных внешних воздействий FВОЗМ наиболее важной является сила трения при перемещении груза под действием ускорения. Сила сухого трения является причиной зоны нечувствительности датчика, которая ограничивает точность измерения ускорения. Для повышения точности создаются конструкции направляющих, не имеющих сухого трения — жидкостные, магнитные или упругие направляющие. Простейшая конструкция упругой направляющей, обеспечивающая одну степень свободы — упругий параллелограмм, показана на рис.127.

Рис.127.
Подвес инерционной массы акселерометра с помощью упругого параллелограмма.
Упругий параллелограмм образован двумя тонкими упругими лентами 2 прикрепленными одной стороной к грузу 1, а другой стороной к основанию прибора. Жесткость лент к перемещениям в направлении оси х значительно ниже, чем в направление осей y и z. Поэтому груз может перемещаться практически только вдоль оси х. Движущийся груз не имеет механического контакта с неподвижными деталями, что исключает сухое трение. Упругие ленты выполняют одновременно роль направляющих и пружин. Используя для лент материал с низким внутренним трением (закаленная сталь, бериллиевая бронза и пр.) можно создавать конструкции акселерометров с очень малыми зонами нечувствительности и высокой точностью.
В простых акселерометрах величина коэффициента передачи К и период собственных колебаний Т взаимосвязаны (К= T2=m/c), что накладывает ограничения на свойства датчика. Более широкими возможностями обладают акселерометры, выполненные по компенсационной схеме.

UW
Рис.128.
Схема маятникового компенсационного акселерометра.
На рис.128 представлена схема одноосного компенсационного акселерометра. Инерционная масса М закреплена на рычаге радиусом R0 и может поворачиваться вокруг точки О. На инерционной массе закреплен якорь датчика угла поворота ДУ (в частном случае якорь датчика может являться инерционной массой). На рычаге на расстоянии RK от оси вращения установлен постоянный магнит корректирующего устройства, взаимодействующий с корректирующими обмотками КО.
При движении основания, на котором установлен датчик, с ускорением WX в направлении оси х на инерционную массу будет действовать сила инерции и другие силы. Запишем сумму моментов вокруг точки О, действующих на подвижную часть датчика.
 (78)
(78)
Здесь FW=-m WX – сила инерции, FK=KKJKO – сила, прикладываемая корректирующим устройством, FВОЗМ – возмущения, действующие на рычаг. Уравнение движения рычага можно записать в виде
 . (79)
. (79)
Момент
инерции рычага относительно т.О в первом
приближении можно принять равным 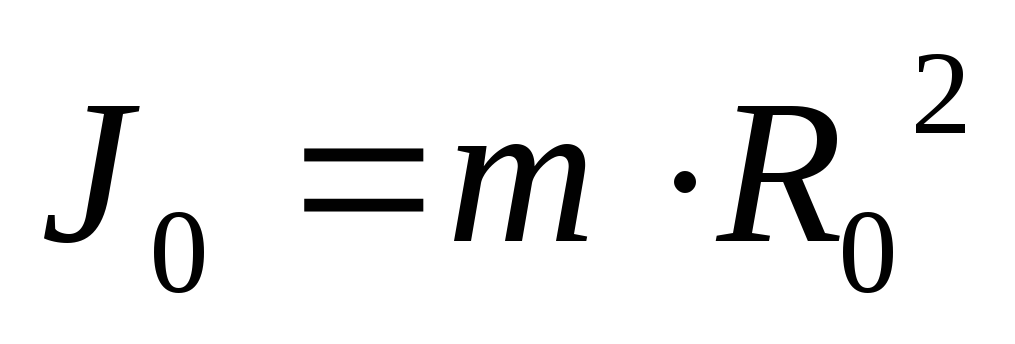 .
.
Под
действием ускорения основания рычаг
отклонится на угол α. Датчик угла поворота
рычага ДУ сформирует сигнал 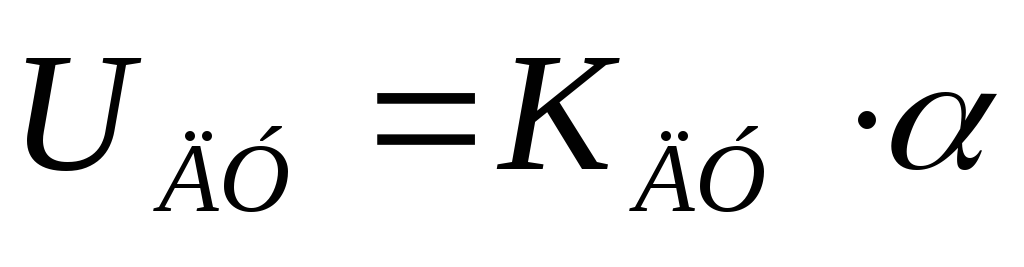 (в форме сигнала амплитудной модуляции
переменного тока), который с помощью
фазочувствительного выпрямителя ФЧВ
преобразуется в эквивалентный сигнал
постоянного токаUα.
(в форме сигнала амплитудной модуляции
переменного тока), который с помощью
фазочувствительного выпрямителя ФЧВ
преобразуется в эквивалентный сигнал
постоянного токаUα.
Этот сигнал преобразуется регулятором РЕГ совместно с усилителем мощности УМ в управляющий сигнал JKOдля корректирующего устройства. Корректирующее устройство содержит обмотки, в которых протекающий ток создает магнитное поле, взаимодействующее с магнитным полем постоянного магнита установленного на рычаге и создающее корректирующее усилие FK.
Датчик угла, ФЧВ, регулятор, усилитель мощности и корректирующее устройство образуют т.н. «электрическую пружину».
Структурная схема сформированной замкнутой системы показана на рис.129.

Рис.129
Структурная схема компенсационного акселерометра.
В
этой системе присутствует двойной
интегратор, отображающий связь между
угловым ускорением и углом поворота
рычага. Если считать ДУ, ФЧВ, УМ
безынерционными с передаточными
функциями КДУ,КФЧВ и КУМ соответственно, то для обеспечения
устойчивости системы необходим
пропорционально-дифференциальный
регулятор с передаточной функцией  или дополнительный датчик скорости
поворота рычага.
или дополнительный датчик скорости
поворота рычага.
В этом случае передаточная функция замкнутой системы по каналу: входной сигнал — WX , выходной сигнал –UH будет иметь вид
 . (80)
. (80)
Здесь 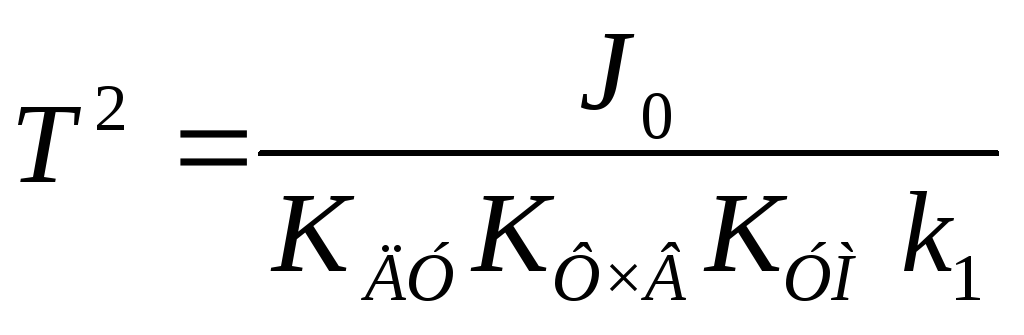 ,
, ,
, .
.
Для
компенсационной схемы акселерометра
выбором параметров системы можно
обеспечить желаемые соотношения между
частотой собственных колебаний (Ω=1/Т)
и крутизной статической характеристики
( ).
).
Следует
учесть, что при отклонении рычага от
исходного положения датчик становится
восприимчивым к ускорению основания в
направлении оси Оу ( ).
Для уменьшения этой перекрестной связи
необходимо обеспечить малую величину
угла отклонения рычага.
).
Для уменьшения этой перекрестной связи
необходимо обеспечить малую величину
угла отклонения рычага.
В настоящее время благодаря прогрессу микроэлектроники стало возможным создание одно – и двухосных акселерометров очень малых габаритов. На рис.130 представлен двухосевой акселерометр MXS3334UL. Размеры акселерометра 5х5х1.8 мм.

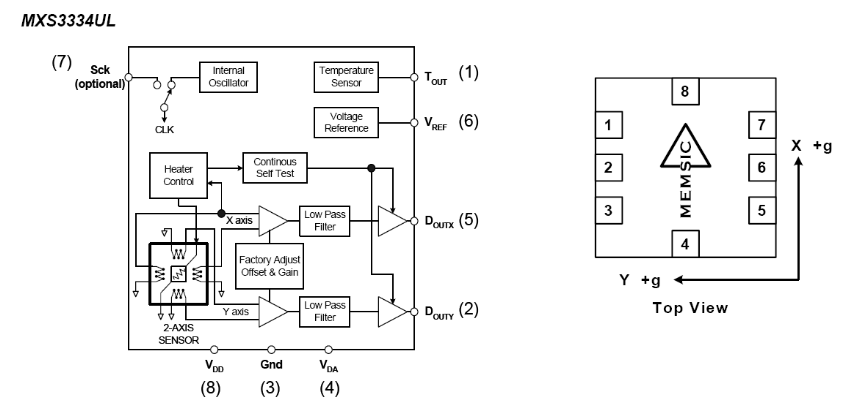
Рис.130.
Микроэлектронный двухосевой акселерометр.
Датчик линейных ускорений может быть использован для измерения параметров вибрации. Для этого датчик устанавливают в той точке объекта, в которой требуется измерение и фиксирует ускорения вызванные вибрацией. По результатам измерения определяется спектр вибраций – частоты и амплитуды ускорений на каждой частоте. При необходимости по этим результатам можно определить скорости и перемещения при вибрации на каждой частоте.
Специфической областью применения датчиков линейных ускорений является сейсмометрия – измерение колебаний земной поверхности для регистрации землетрясений как естественного, так и искусственного (при испытаниях ядерного оружия) происхождения.
Одна из важных областей использования акселерометров – инерциальная навигация. В основе инерциальной навигации лежит очень простая идея – интеграл от ускорения есть скорость движения основания, на котором установлен акселерометр, а двойной интеграл от ускорения – перемещение основания в инерциальном пространстве. С помощью инерциальной навигации становится возможным определять положение подвижного объекта (летательного аппарата, корабля и т.п.) автономно – без использования радиоволн, ориентиров, метеопоправки на ветер и т.д.
При практической реализации инерциальной навигации возникает две основные проблемы:
1) Погрешность измерения ускорения и интегрирования. При двойном интегрировании ошибка растет пропорционально квадрату времени интегрирования. Так при ошибке измерения равной 0,01g≈0,1м2/с за 20 минут ошибка в определении перемещения составит
 .
.
Для инерциальной навигации необходимы акселерометры с погрешностью измерения 10-4-10-5g, создание которых является очень сложной технической задачей, но для современной техники разрешимой.
2) Вторая проблема имеет фундаментальный характер. На любое материальное тело, в том числе на инерционную массу акселерометра кроме инерционной силы, вызванной ускорением движения, действует гравитационная сила в соответствии с законом всемирного тяготения. Несмотря на различие физической природы этих двух сил до настоящего времени не найдена возможность измерения их по отдельности. Для инерциальной навигации проблема состоит в том, что рассмотренные виды акселерометров реагируют не только на инерционное, но и на гравитационное воздействие. Они измеряют «кажущееся ускорение». Если гравитационная сила, действующая на подвижный объект, чем-либо уравновешена (подъемной силой крыла самолета или архимедовой силой поддерживающей корабль наплаву), то на инерционную массу акселерометра гравитационная сила продолжает действовать. В инерциальных системах навигации для устранения влияния гравитационной составляющей показаний акселерометра используется установка акселерометров на специальной платформе, с высокой точностью стабилизированной в горизонтальной плоскости. Необходимая точность стабилизации горизонтального положения платформы составляет доли угловой минуты, что, в свою очередь, является сложной технической проблемой. Поэтому на создание высокоточных инерциальных систем способна промышленность далеко не каждого государства.
При
построении платформы стабилизированной
в горизонтальной плоскости необходим
датчик отклонения от вертикали (маятник,
отвес или акселерометры). Но, как показано
при рассмотрении акселерометров, при
установке такой платформы на подвижном
объекте кроме гравитационной составляющей
на сигнал акселерометра влияет и
ускорение движения объекта. В теоретической
механике рассматривается вариант
маятника не подверженного влиянию
ускорения основания – невозмущаемый
маятник Шулера. Доказано, что если период
собственных колебаний маятника равен  ,гдеRz – радиус
Земли, g – ускорение свободного падения,
такой маятник не реагирует на ускорение
движения основания.
,гдеRz – радиус
Земли, g – ускорение свободного падения,
такой маятник не реагирует на ускорение
движения основания.
Реализация маятника Шулера долгое время была проблематичной – в варианте математического маятника (точечная масса на нерастяжимой нити) длина подвеса должна равняться радиусу Земли. В настоящее время реализация маятника Шулера стала возможной с помощью гиростабилизированной платформы с акселерометрами.