


H-мост — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 20 мая 2016; проверки требуют 2 правки. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 20 мая 2016; проверки требуют 2 правки.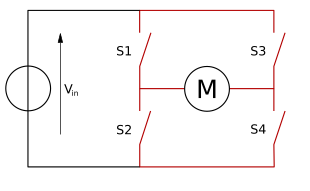 Структура H-моста (показано красным)
Структура H-моста (показано красным)H-мост — это электронная схема, которая даёт возможность приложить напряжение к нагрузке в разных направлениях. Эта схема очень часто используется в робототехнике и игрушечных машинах, чтобы изменять направление вращения мотора. H-мосты представлены в виде интегральных схем, а также могут быть построены из отдельных радиодеталей.
Термин H-мост появился благодаря графическому изображению этой схемы, напоминающему букву Н. H-мост собирается из 4 переключателей, электронных или механических (реле). Когда ключи S1 и S4 замкнуты, а S2 и S3 разомкнуты, мотор крутится в одну сторону, когда же S2 и S3 замкнуты, а S1 и S4 разомкнуты, мотор крутится в другую сторону. Также H-мост предоставляет возможность электрически тормозить вращение двигателя, коротко замыкая его выводы.
Также из схемы следует, что ключи S1 и S2, или S3 и S4 никогда не должны замыкаться вместе, так как это приведёт к короткому замыканию источника питания.
Использование в схеме в качестве переключателей тумблеров П2Т снимает проблему одновременного включения S1 и S2 (S3 и S4), т.к. П2Т (в зависимости от типа от П2Т-1 до П2Т-24) не допускают одновременного замыкания контактов на общий вывод.
 Два базовых состояния H-моста
Два базовых состояния H-мостаОбычно H-мост используется для смены полярности питания мотора (реверс), но также он может и тормозить мотор, коротко замыкая его выводы (в случае простого мотора постоянного тока). Таблица ниже показывает, чего можно добиться, изменяя состояние ключей S1-S4:
| S1 | S2 | S3 | S4 | Результат |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | Мотор крутится вправо |
| 0 | 1 | 1 | 0 | Мотор крутится влево |
| 0 | 0 | 0 | 0 | Свободное вращение мотора |
| 0 | 1 | 0 | 1 | Мотор тормозится |
| 1 | 0 | 1 | 0 | Мотор тормозится |
| 1 | 1 | 0 | 0 | Короткое замыкание источника питания |
| 0 | 0 | 1 | 1 | Короткое замыкание источника питания |
 Типичный H-мост
Типичный H-мостОчень часто H-мосты строятся из приборов обратной полярности, таких как биполярные транзисторы типа р-n-р или полевых транзисторов с р-каналом, подключенных к биполярным транзисторам типа n-р-n или полевым с n-каналом.
Часто используются полевые транзисторы с изолированным затвором в связи с их способностью переключать большие токи, а также низким сопротивлением открытого канала, но в радиолюбительских и маломощных схемах часто присутствуют биполярные транзисторы.
H-мост также можно построить и с помощью механических переключателей, таких как реле, но с развитием электроники такой подход используется все реже.
Создано много коммерчески успешных недорогих H-мостов в виде микросхем-драйверов, например серии L293x.
Ардуино: управление двигателем постоянного тока, L293D | Класс робототехники
Ардуино: управление двигателем постоянного тока, L293D
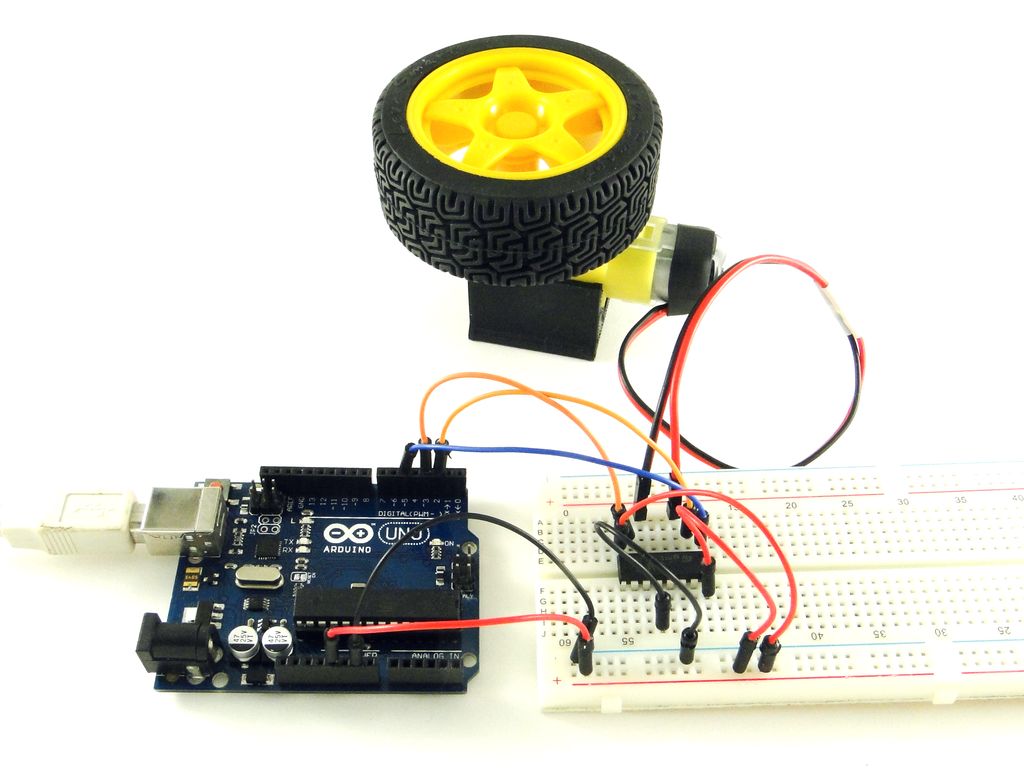
Составив транзисторы определенным образом, мы получим устройство для управления вращением двигателя в обе стороны. Такое устройство называется H-мост. Вот так выглядит H-мост на биполярных транзисторах:
INA и INB на рисунке — это вход слабых управляющих сигналов. В случае Ардуино, на них необходимо подавать либо 0 (земля) либо +5В. VCC — это питание двигателей, оно может быть во много раз выше напряжения управляющего сигнала. GND — это земля, общая для Ардуино и H-моста.
В зависимости от того, на какой из входов мы подаем положительный сигнал, двигатель будет крутиться в одну или в другу сторону. Как правило, в схему драйвера двигателя постоянного тока помимо самого H-моста, добавляют защитные диоды, фильтры, опторазвязки и прочие улучшения.
Микросхема драйвера L293D
Разумеется, необязательно собирать драйвер двигателя вручную из отдельных транзисторов. Существует множество готовых микросхем, которые позволяют управлять разными типами двигателей. Мы рассмотри распространенный драйвер L293D.
Микросхема представляет собой два H-моста, а значит можно управлять сразу двумя двигателями. Каждый мост снабжен четырьмя защитными диодами и защитой от перегрева. Максимальный ток, который может передать L293D на двигатель — 1.2А. Рабочий ток — 600мА. Максимальное напряжение — 36 В.
Вконтакте
РАЗРАБОТКА СИЛОВОГО МОДУЛЯ ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА НА ОСНОВЕ СХЕМЫ H-МОСТ | Опубликовать статью РИНЦ
Черных А.А.
Студент, НИ Томский политехнический университет
РАЗРАБОТКА СИЛОВОГО МОДУЛЯ ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА НА ОСНОВЕ СХЕМЫ H-МОСТ
Аннотация
В данной работе будет описан расчет и сборка усилителя на основе биполярных транзисторов. Подбор элементной базы, которая соответствовала нагрузке, и обеспечивалась стабильная работа. Тестирование данного силового модуля под управлением МК Atmega16.
Ключевые слова: транзистор, эмиттер, база, коллектор, оптопара, гальваническая развязка, двигатель, микроконтроллер.
Chernykh A.A.
Student, Tomsk Polytechnic University
DEVELOPMENT OF DC-MOTOR CONTROL MODULE, BASED ON H-BRIDGE SCHEME
Abstract
This article describes the calculation and assembly of the amplifier based on bipolar transistors. Selection of new elements, which correspond to the load, and ensures stable operation. Testing of the power module running controlled by Atmega16 microcontroller.
Keywords: emitter, base, collector, opto-galvanic isolation, motor, microcontroller.
Введение
Усилитель является одним из основных узлов различной аппаратуры в устройствах автоматики, телемеханики, вычислительной и информационно-измерительной техники. Электронный усилитель – это устройство, преобразующее маломощный электрический сигнал на входе в сигнал большой мощности на выходе с минимальными искажениями формы. Усиление мощности сигнала осуществляется за счет потребления усилителем энергии от источника питания.
Выбор структуры усилителя
Так как требуемый коэффициент усиления достигает нескольких сотен, то целесообразно составлять усилитель из нескольких простейших усилителей. Такие простейшие усилители называются усилительными каскадами.
Принцип работы и расчет силового модуля
Как правило, управление двигателем постоянного тока осуществляется изменением напряжения, подаваемого на концы обмотки якоря. Для реверсирования двигателя необходимо менять полярность этого напряжения. Для этого используется мостовая схема: Н-мост (драйверы двигателей), состоящая из четырех силовых ключей (в некоторых случаях 2х управляющих дополнительно) и управляющих элементов. Управляющий сигнал, подаваемый на силовую часть схемы, генерируется с помощью микроконтроллера. Для изменения напряжения (аналогового сигнала) используется широтно-импульсная модуляция (ШИМ). Микроконтроллер генерирует ШИМ–сигнал с определенным коэффициентом заполнения (см. рис. 1).
Коэффициент заполнения определяет среднее значение напряжения, которое может составлять от 0 до 5В на выводе микроконтроллера, что соответствует 0..7,2В, подаваемым на обмотку якоря двигателя, а также необходимый ток, так как микроконтроллер подает очень маленький ток. На графике показаны сигналы с коэффициентом заполнения 0,25 и 4.

Рис. 1 – ШИМ-сигнал
Пунктирная линия соответствует средним значениям напряжения – 1В и 4В соответственно. Коэффициент заполнения устанавливается с помощью установки значения регистра в AVR микроконтроллере ATmega16 – OCR1AL (для 8-битного ШИМ, который используется для управления двигателем). Это позволяет установить 256 различных скоростей вращения электродвигателя. Значению OCR1AL = 0 соответствует среднее напряжение на выводе OC1A 0В, значению OCR1AL = 255 соответствует напряжение 5В. Частота ШИМ–сигнала составляет 4 000 000 / 256 = 15 625 Гц.
Силовая часть мостовой схемы приведена на рисунке 2. Она состоит из четырех силовых транзисторов, двух управляющих транзисторов, резисторов, ограничивающих базовые токи, шунтирующих диодов и гальванической развязки в виде двух оптопар. Питание Н-моста происходит от блока питания, подающего постоянное напряжение +7,2В относительно земли.
Рассчитываем параметры для маломощного ДПТ, потребляемого ток до 1А и напряжением 7,2В.

Максимальный коллекторный ток на силовых транзисторах (при пуске двигателя) составляет 2 А. Чтобы обеспечить переход транзисторов в режим насыщения, базовый ток должен быть не меньше:

С учетом падения на переходах база-эмиттер напряжения 0,7В и разности потенциалов между коллектором и эмиттером управляющих транзисторов 1В, максимальные сопротивления в базовых цепях составят:


Рис. 2 – Электрическая принципиальная схема силового модуля
Были выбраны сопротивления R1= R2 = 70 Ом. Таким образом, базовый ток составил:

Следовательно, максимально возможное сопротивление:

Для схемы берем сопротивления номиналом 1кОм.
Мощность, рассеивающаяся на сопротивлениях, составит:


Рис. 3 – Силовой модуль для ДПТ на биполярных транзисторах
Заключение
Был спаян упрощенный вариант схемы на четырех транзисторах без гальванической развязки (Рис.3) и протестирован на МК. Также подобраны транзисторы с запасом мощности согласно схеме, как показано на рисунке 2, для широкой применяемости модуля.
Литература
- Datasheet на микроконтроллер ATmega16.
- Биполярный транзистор, расчёт транзисторного каскада [Электронный ресурс]. URL: http://www.meanders.ru/tranzistors.shtml Режим доступа: свободный (дата обращения: 07.01.2015)
- ALL Transistor datasheet [Электронный ресурс]. URL: http://alltransistors.com/ Режим доступа: свободный (дата обращения: 09.01.2015)
References
- Datasheet na mikrokontroller ATmega16.
- Bipoljarnyj tranzistor, raschjot tranzistornogo kaskada [Jelektronnyj resurs]. URL: http://www.meanders.ru/tranzistors.shtml Rezhim dostupa: svobodnyj (data obrashhenija: 07.01.2015)
- ALL Transistor datasheet [Jelektronnyj resurs]. URL: http://alltransistors.com/ Rezhim dostupa: svobodnyj (data obrashhenija: 09.01.2015)
Мощный H-мост для ЧПУ — Электропривод
Ознакомился с темой про Керни-Трекер, да, человек частично решил проблему, апотом купил промышленые сервоприводы 🙂
мне не совсем понравилась схемотехника первого варианта его платы, которую он использует — в Н-мосте верхние транзисторы — Р-канальные, что по финансам дорого выходит. этот вариант — смущают бутстрепные драйверы.
пока что я ознакамливаюсь с книгами по электронике, в смысле, о мосфетах и IGBT читаю.
как будут какие-нибудь подвижки, буду сюда выкладывать информацию.
на данный момент — вот примерно как я представляю себе схему:
собственно, Н-мост, модуль динамического торможения (сам придумал, в интернете плохо искал или ничего не нашел), датчик тока на оп. усилителе и шунтирующем резисторе.
логику тут я не привожу, о ней потом.
я тут пишу начиная с азов, поправьте меня если я в чем-то неправ.
Вот так у нас работает Н-мост ( вращение в однй и в другую стороны)
Вот так вот происходит торможение двигателя, при небольших оборотах ( внешнего ШИМ-сигнала нет)
Вот так вот происходит торможение двигателя с тормозным резистором ( внешнего ШИМ-сигнала нет)
схемы открытия верхних транзисторов Н-моста будут питаться от своих блоков питания
теперь, о логике.
логика должна
1. формировать запрет включения одного из каналов, при включении другого ( на рассыпухе соберу, элементы И- и НЕ- на входах)
2. формировать задержку переключения между каналами (при смене направления вращения, в частности)
(скачал датащит на 555 таймер, пока не думал о реализации) — Это надо для защиты от «перекрытия фаз» — так как транзисторы закрываются не мгновенно, и возможно КЗ
3. Отключение силовых транзисторов при превышении допустимого тока (с выхода операционого усилителя заведу сигнал на дифференциальный компаратор типа LM323, сигнал с которого пойдет на входную логику из пункта один. при превышении тока транзисторы выключатся все)
4. Определять режим торможения, при скорости замедления выше определенной константы — включать модуль динамического торможения с тормозным резистором, в других случаях включать только нижние транзисторы Н-моста. (как это сделать на микроконтроллере, мне понятно. но я не хочу МК использовать, ибо помехи, шумы, и есть опасность спалить схему при зависании МК )
вот такие вот дела. Жду конструктивных замечаний.
H-мост (Troyka-модуль) [Амперка / Вики]
Видеообзор
Принцип работы H-моста
Термин «H-мост» появился благодаря графическому изображению этой схемы, напоминающему букву «Н». H-мост состоит из 4 ключей. В зависимости от текущего состояние переключателей возможно разное состояние мотора.
| S1 | S2 | S3 | S4 | Результат |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | Мотор крутится вправо |
| 0 | 1 | 1 | 0 | Мотор крутится влево |
| 0 | 0 | 0 | 0 | Свободное вращение мотора |
| 0 | 1 | 0 | 1 | Мотор тормозится |
| 1 | 0 | 1 | 0 | Мотор тормозится |
| 1 | 1 | 0 | 0 | Короткое замыкание источника питания |
| 0 | 0 | 1 | 1 | Короткое замыкание источника питания |
Подключение и настройка
H-мост (Troyka-модуль) общается с управляющей электроникой по 2 сигнальным проводам D и E — скорость и направления вращения двигателя.
Мотор подключается к клеммам M+ и M—. А источник питания для мотора подключается своими контактами к колодкам под винт P. Положительный контакт источника питания подключается к контакту P+, а отрицательный — к контакту P—.
При подключении к Arduino или Iskra JS удобно использовать Troyka Shield. С Troyka Slot Shield можно обойтись без лишних проводов.
Примеры работы
Приступим к демонстрации возможностей. Схема подключения — на картинке выше. Управляющая плата запитана через USB или внешний разъём питания.
Примеры для Arduino
Для начала покрутим мотор в течении трёх секунд в одну, а затем другую сторону.
- dc_motor_test.ino
// пин управления скоростью мотора (с подержкой ШИМ) #define SPEED 11 // пин выбора направления движения мотора #define DIR A3 void setup() { // пины в режим выхода pinMode(DIR, OUTPUT); pinMode(SPEED, OUTPUT); } void loop() { // покрутим в течении 3 секунд мотор в одну сторону digitalWrite(DIR, LOW); digitalWrite(SPEED, HIGH); delay(3000); // после чего остановим мотор digitalWrite(SPEED, LOW); delay(1000); // далее покрутим в течении 3 секунд мотор в другую сторону digitalWrite(DIR, HIGH); digitalWrite(SPEED, HIGH); delay(3000); // после чего остановим мотор digitalWrite(SPEED, LOW); delay(1000); }
Усовершенствуем эксперимент: заставим мотор плавно разгоняться до максимума и останавливаться в одном направлении, а затем в другом.
- dc_motor_test2.ino
// пин управления скоростью мотора (с подержкой ШИМ) #define SPEED 11 // пин выбора направления движения мотора #define DIR A3 void setup() { // пины в режим выхода pinMode(DIR, OUTPUT); pinMode(SPEED, OUTPUT); } void loop() { // меняем направление digitalWrite(DIR, LOW); // теперь заставим мотор медленно разгоняться до максимума for (int i = 0; i <= 255; i++) { analogWrite(SPEED, i); delay(10); } // заставим мотор медленно останавливатся for (int i = 255; i > 0; i--) { analogWrite(SPEED, i); delay(10); } // меняем направление digitalWrite(DIR, HIGH); // теперь заставим мотор медленно разгоняться до максимума for (int i = 0; i <= 255; i++) { analogWrite(SPEED, i); delay(10); } for (int i = 255; i > 0; i--) { analogWrite(SPEED, i); delay(10); } }
Пример для Iskra JS
- dc_motor_test.js
// подключаем библиотеку var Motor = require('@amperka/motor'); // подключаем мотор с указанием пина скорости и направления вращения var myMotor = Motor.connect({phasePin: A3, pwmPin: P11, freq: 100}); // крутим мотор назад на 75% мощности myMotor.write(0.75);
Элементы платы
Драйвер двигателей
Драйвер моторов TB6612FNG — это сборка из двух H-полумостов. В нашем модуле мы запараллели оба канала микросхемы H-моста для компенсации нагрева.
Нагрузка
Мотор подключается своими контактами к колодкам под винт M— и M+. Полярность в данном случае неважна, так она влияет на направления вращения вала и её можно изменять программно.
Питание нагрузки
Источник питания для мотора (силовое питание) подключается своими контактами к колодкам под винт P. Положительный контакт источника питания подключается к контакту P+, а отрицательный — к контакту P-. Напряжение питания моторов должно быть в пределах 3–12 В постоянного тока.
Контакты подключения трёхпроводных шлейфов
1-группа
D— направления вращения двигателя. Подключите к цифровому пину микроконтроллера.V— питание логической части модуля. Соедините с питанием микроконтроллера.G— земля. Дублирует пинGиз второй группы Troyka-контактов. Соедините с землёй микроконтроллера.
2-группа
E— включение и управление скоростью вращения мотора. Подключите к цифровому пину микроконтроллера.V2— силовое питание модуля. Подробнее про объединение питания.G— земля. Дублирует пинGиз первой группы Troyka-контактов. Соедините с землёй микроконтроллера.
Джампер объединения питания
Силовое питание можно также подключать через пины V2 и G из второй группы Troyka-контактов. Для этого установите джампер объединения питания V2=P+. При этом подключать питание к контактам P+ и P- уже не нужно.
Внимание! Джампер объединения питания связывает пины V2 с клеммником P+ внешнего питания.
Если вы не уверены в своих действиях или боитесь подать слишком высокое напряжение с клемм H-моста на управляющую плату, не ставьте этот джампер!
Данный джампер будет полезен при установке H-моста на Troyka Slot Shield в пины поддерживающие V2.
Например, если на плату подаётся 12 В через разъём внешнего питания, то установив джампер на Troyka Slot Shield в положение V2-VIN вы получите напряжение 12 В и на ножке V2 H-моста. Эти 12 В можно направить на питание нагрузки — просто установите джампер V2=P+ на H-мосте.
Световая индикация
Сдвоенный светодиод индикации скорости и направления вращения на плате.
При высоком логическом уровне на пине управления направлением вращения E, индикатор светится красным светом. При низком уровне — зелёным.
Чем выше скорость вращения двигателя, тем ярче горит зелёный либо красный светодиод.
Обвязка для согласования уровней напряжения
Необходима для сопряжения устройств с разными напряжениями логических уровней.
Принципиальная и монтажная схемы
Характеристики
Драйвер моторов: TB6612FNG
Количество подключаемых моторов: 1
Напряжение логической части: 3,3—5 В
Напряжение силовой части: 3,3—12 В
Длительно допустимый ток нагрузки: до 1,2 A
Габариты: 25,4×25,4 мм
Ресурсы
H мост — это… Что такое H мост?
Структура Н-моста (показано красным)H-мост — это электронная схема, которая дает возможность приложить напряжение к нагрузке в разных направлениях. Эта схема очень часто используется в робототехнике и игрушечных машинах, чтобы изменять направление вращения мотора. H-мосты представлены в виде интегральных схем, а также построенных из отдельных радиодеталей.
Основное
Термин Н-мост появился благодаря графическому изображению этой схемы, напоминающей букву Н. Н-мост собирается из 4 переключателей, электронных или механических (Реле). Когда ключи S1 и S4 замкнуты, а S2 и S3 разомкнуты, мотор крутится в одну сторону, когда же S2 и S3 замкнуты, а S1 и S4 разомкнуты, мотор крутится в другую сторону. Так же Н-мост предоставляет возможность электрически тормозить вращение двигателя, коротко замыкая его выводы.
Так же из схемы следует, что ключи S1 и S2, или S3 и S4 никогда не должны замыкаться вместе, так как это приведет к короткому замыканию источника питания.
Операции
Два базовых состояния Н-мостаОбычно Н-мост используется для смены полярности питания мотора (реверс), но так же он может и тормозить мотор, коротко замыкая его выводы (в случае простого мотора постоянного тока). Таблица ниже показывает, чего можно добиться, изменяя состояние ключей S1-S4
| S1 | S2 | S3 | S4 | Результат |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | Мотор крутится вправо |
| 0 | 1 | 1 | 0 | Мотор крутится влево |
| 0 | 0 | 0 | 0 | Свободное вращение мотора |
| 0 | 1 | 0 | 1 | Мотор тормозится |
| 1 | 0 | 1 | 0 | Мотор тормозится |
| 1 | 1 | 0 | 0 | Короткое замыкание источника питания |
| 0 | 0 | 1 | 1 | Короткое замыкание источника питания |
Конструкция
 Типичный Н-мост
Типичный Н-мостОчень часто Н-мосты строятся из приборов обратной полярности, таких как биполярные транзисторы р-n-р типа или полевых транзисторов с р-каналом, подключенных к биполярным транзисторам n-р-n типа или полевым с n-каналом.
Часто используются полевые транзисторы с изолированным затвором в связи с их способностью переключать большие токи, а также низким сопротивлением открытого канала, но в радиолюбительских и низко мощных схемах часто присутствуют биполярные транзисторы.
Н-мост так же можно построить и с помощью механических переключателей, таких как реле, но с развитием электроники такой подход используется все реже.
Создано много коммерчески успешных не дорогих Н-мостов в виде микросхем — драйверов, например серии L293x.