


Моторный привод (фото) — Википедия
 Приставной электропривод Nikon MD12 для «компактного» семейства камер Nikon FM/FE/FA. На верхней крышке корпуса расположены контакты (слева), винт крепления к штативному гнезду фотоаппарата и полумуфта соединения с механизмом взвода. На ручке сверху находится кнопка электроспуска с кольцевым селектором режима протяжки Single/Continuous
Приставной электропривод Nikon MD12 для «компактного» семейства камер Nikon FM/FE/FA. На верхней крышке корпуса расположены контакты (слева), винт крепления к штативному гнезду фотоаппарата и полумуфта соединения с механизмом взвода. На ручке сверху находится кнопка электроспуска с кольцевым селектором режима протяжки Single/ContinuousМото́рный при́вод, реже Ва́йндер — механизм, предназначенный для автоматического взвода затвора фотоаппарата и перемещения фотоплёнки на следующий кадр. Такое устройство повышает оперативность съёмки по сравнению с ручным взводом и даёт возможность непрерывной съёмки серии кадров[1]. Первые моторные приводы были приставными и выполнялись как отдельное устройство, закрепляемое снизу фотоаппарата при помощи штативной гайки, и соединявшееся с ним через механическую муфту[* 1]. Моторные приводы выпускались, главным образом для малоформатных фотоаппаратов, получивших в середине XX века наибольшее распространение в профессиональной фотожурналистике, однако отдельные модели разрабатывались и для среднеформатных камер.
с пружинным приводом. 1934 год
 Фотоаппарат «Pentax LX» с электроприводом и кассетой на 250 кадров
Фотоаппарат «Pentax LX» с электроприводом и кассетой на 250 кадров  Фотоаппараты «Leica R4» (слева) и «Leicaflex SL2 Mot» с электроприводами
Фотоаппараты «Leica R4» (слева) и «Leicaflex SL2 Mot» с электроприводами 
Устройства, пригодные для серийной фотосъёмки, появились в период развития хронофотографии. Первым из таких приспособлений можно считать установку из 12 кабин с фотоаппаратами для съёмки бегущей лошади, созданную Эдвардом Мэйбриджем в 1874 году[2]. В компактном виде подобная технология впервые реализована Этьеном-Жюлем Марэ, создавшим в 1882 году фоторужьё, снимающее до 10 кадров в секунду на вращающуюся фотопластинку[3]. Дальнейшее развитие хронофотографии привело к созданию кинематографа, но совершенствование фоторепортажа и спортивной фотографии заставляло разработчиков обычных фотоаппаратов задумываться о повышении оперативности съёмки. Такие возможности появились с распространением рулонных фотоматериалов, и особенно 35-мм киноплёнки, ставшей основой для целого класса малоформатной аппаратуры.
Пружинная протяжка плёнки[править | править код]
Первые приводы для автоматической протяжки плёнки были механическими и работали от заводной пружины. Приставные пружинные вайндеры «Leica MOOLY» начали выпускать для малоформатных фотоаппаратов «Leica III» ещё до начала Второй мировой войны[4]. В 1936 году для этой камеры появился даже вайндер «Leica OOFRC» с дистанционным спуском[5]. Наибольшую известность из-за приспособленности к серийной и автоматической съёмке получили фотоаппараты серии «Robot» с квадратным кадром 24×24 мм на 35-мм киноплёнке. В 1934 году в Германии начат выпуск первой модели «Robot 1» со встроенным пружинным приводом, протягивавшим плёнку со скоростью до 4 кадров в секунду
Приставные электроприводы[править | править код]
Широкое распространение автоматической протяжки началось после появления достаточно компактных источников питания для электродвигателя. Впервые приставной электропривод с питанием от бортовой электросети самолёта был использован для фотоаппарата «Leica 250», выпускавшегося по заказу Люфтваффе. Автоматическая протяжка плёнки с дистанционным электроспуском позволяли лётчикам вести фоторазведку, не отвлекаясь от управления
С миниатюризацией электродвигателей и источников питания связано появление любительской разновидности электропривода — вайндера[* 2]. Этот тип привода отличался отсутствием электроспуска и, как следствие — невозможностью серийной съёмки и дистанционного управления. Вайндеры обеспечивали сравнительно невысокую скорость 1,5—2 кадра в секунду в покадровом режиме против серийной съёмки моторов с частотой 3—6 кадров в секунду. Фотограф мог в зависимости от задачи и возможностей использовать лёгкий вайндер или дорогой скоростной мотор, выпускавшиеся для одного и того же типа фотоаппарата. Некоторые системные камеры могли оснащаться 3—5 различными типами разработанных специально для этой модели вайндеров и моторов. Универсальных стандартов крепления моторных приводов не существовало. Приставные моторы и вайндеры выпускались для конкретных моделей или линеек фотоаппаратов и были редко взаимозаменяемы из-за несовпадения размеров и механических характеристик. Одно из редких исключений — моторный привод Nikon MD-12, пригодный для целой линейки камер Nikon: FM, FE, FA, FM2, FE2, а также FM3A
Встроенный мотор[править | править код]
В конце 1970-х годов появилась тенденция отказа от приставных моторов в любительских камерах и камерах среднего класса. Это было вызвано массовым внедрением электромеханических затворов, которые без батарей также неработоспособны или отрабатывают единственную выдержку. Привод начали встраивать непосредственно в фотоаппарат, одновременно убрав курок ручного взвода. Это упрощало и удешевляло механику камеры, сделав автовзвод доступным даже в «мыльницах».
Такие фотоаппараты могли работать только от встроенного мотора, лишившись возможности взвода затвора без батарей. До конца 1980-х большинство профессиональных фотоаппаратов выпускались с приставными моторами, сохраняя механизм ручного взвода и возможность работы без электропитания. Однако, уже в 1988 году в профессиональной модели F4 корпорация Nikon установила встроенный моторный привод, исключив из кинематики взводной курок (однако, оставив рулетку ручной обратной перемотки). Примерно в это же время все производители фотоаппаратуры стали полностью отказываться от ручного взвода, сохранявшего работоспособность фотоаппарата без элементов питания. Своё применение нашли батарейные рукоятки, иногда называвшиеся в обиходе «бустерами» (англ. Power Drive Booster)
Из советских серийных камер с приставным вайндером могли работать только фотоаппараты «Алмаз-103» и «ЛОМО Компакт-Автомат», однако полноценное производство моторов для них так и не было развёрнуто, они существовали только в опытных разработках
Моторный привод фотоаппарата состоит из металлического или пластмассового корпуса, в котором размещаются электродвигатель и передаточный механизм. Химические батареи первых моторов размещались в отдельном блоке питания, выносном или присоединявшемся непосредственно к приводу. Миниатюризация электродвигателей и повышение компактности источников питания позволили в дальнейшем размещать их в общем корпусе. Моторы для механических камер оснащались электромагнитным спуском, приводящим в действие затвор через специальный толкатель, дублирующий спусковую кнопку фотоаппарата. Поэтому, большинство моторов имели специальный электрический разъём для подключения кабеля дистанционного запуска. Все моторные приводы оснащались автоматикой остановки по окончании ролика плёнки, которая срабатывала при возрастании усилия протяжки выше определённого порога[* 4].
Моторные приводы профессиональных фотоаппаратов кроме взвода затвора и перемещения плёнки могли осуществлять её обратную перемотку в кассету по окончании ролика[9]. Такой функцией оснащалось большинство приставных моторов фотоаппаратов Nikon F2, Nikon F3 и Canon New F-1. Так, приводы MD-1 и MD-2 для модели F2, а также привод MD-4[25] для модели F3 оснащались специальной муфтой, вдвигавшейся через отверстие корпуса камеры во фланец кассеты и осуществлявшей быструю перемотку, уменьшая время перезарядки фотоаппарата[* 5]. Аналогичную конструкцию имел привод FN для камеры Canon New F-1[26]. С отказом от приставных моторов в пользу встроенных, моторизованная обратная перемотка стала стандартом для всех фотоаппаратов. Кроме того, большинство профессиональных приводов оснащались собственным дополнительным счётчиком кадров, который можно было настраивать на автоматическое отключение протяжки после любого кадра. Это необходимо для ограничения длины серий при дистанционной съёмке, а также на морозе и в других ситуациях, когда есть опасность обрыва перфорации при автоматическом останове. Кроме перечисленных органов управления, моторные приводы обладали собственной спусковой кнопкой, заменявшей при работе привода спусковую кнопку камеры, а также переключателем режимов протяжки[15]. Переключатель режимов обязательно имел два положения: S (англ. Single shot) для покадровой съёмки и C (англ. Continuous shooting) для непрерывной. В некоторых приводах была возможность плавной или ступенчатой регулировки скорости протяжки плёнки. В современных цифровых фотокамерах этим переключателям соответствует селектор выбора режима Drive Mode.
Первые приставные электроприводы обладали только механическими связями с фотоаппаратом, поэтому интервал между командой на спуск затвора и началом его последующего взвода был фиксирован, и при установке длинных выдержек (как правило, длиннее 1/60 секунды) требовалось включение пониженной скорости с увеличенной задержкой. В противном случае взвод затвора мог начаться раньше окончания выдержки и повредить механизм. Так, приводы MD-1 и MD-2 для камеры Nikon F2 обеспечивали стандартную частоту съёмки 4,3 кадра в секунду в диапазоне выдержек не длиннее 1/125[27]. Для съёмки на более длинных выдержках предусмотрены ещё три пониженных скорости, позволявшие расширить диапазон до 1/60, 1/8 и 1/4 секунды. Установка более длинной выдержки затвора, чем разрешённая, грозила его поломкой[28]. Регулировка скорости протяжки отсутствовала в более дешёвом приводе MD-3, и установка выдержек длиннее 1/80 секунды при серийной съёмке запрещалась инструкцией[29]. Дальнейшее совершенствование приставных моторов привело к появлению их электрической связи с фотоаппаратом, позволив автоматически учитывать длину выдержки[15]. При этом взвод начинался только после замыкания контактов, сигнализирующих об опускании зеркала, исключая поломку и освобождая фотографа от необходимости следить за согласованием выдержки со скоростью протяжки.
Зависимость частоты съёмки от выдержки с появлением автоматики не изменилась: максимальная скорость обеспечивается до выдержек не длиннее 1/125 секунды, замедляясь при более длинных. Эта зависимость справедлива и для современных цифровых фотоаппаратов, автовзвод затвора которых так же выполняется только после окончания выдержки. Кроме передачи информации о состоянии затвора и зеркала, электрическая связь использовалась для включения экспонометра, а также для подключения систем фотоаппарата к более мощной батарее мотора[30].
Отсутствие плёнки и необходимости её перемотки в цифровом фотоаппарате делает моторный привод ненужным. Перевод затвора во взведённое состояние не требует мощных электродвигателей и механизмов, и зачастую эту работу выполняет электромагнит, являющийся функциональной частью затвора. О плёночных моторах в цифровых камерах напоминает только селектор Drive mode, позволяющий регулировать частоту съёмки и выбирать между покадровым и серийным режимами. В этом же меню, как правило, находится включение автоспуска. От своих плёночных прототипов цифровая фототехника унаследовала батарейные рукоятки, уже широко применявшиеся на момент начала массового производства цифровых камер. Максимальная частота съёмки цифровых зеркальных фотоаппаратов ограничена инерцией зеркала, не превышая 14 кадров в секунду (Canon EOS-1D X Mark II). Более высокая скорость до 16 кадров в секунду достигается только при зафиксированном зеркале и выдержках не длиннее 1/250 секунды[31]. Беззеркальные фотоаппараты, способные отрабатывать выдержку регулировкой времени считывания заряда с матрицы, позволяют достигать любой частоты серийной съёмки, которая ограничена только длительностью выдержки.
- ↑ В некоторых фотоаппаратах для присоединения моторного привода требовалось предварительно снимать нижнюю, а иногда и заднюю крышки камеры, как это было в Canon F-1 и Nikon F
- ↑ Иногда так называют пружинные приводы
- ↑ В «Зените-5» впервые в мире использован электропривод, встроенный непосредственно в корпус зеркальной камеры
- ↑ Усилие рассчитывалось исходя из применения профессиональных двухцилиндровых кассет с раскрывающейся щелью, или одноразовых кассет. При использовании отечественных типов плёнки, обычно заряжаемой в советские многоразовые кассеты вручную, часто требовался подбор кассет «с лёгким ходом»
- ↑ При снятом моторе отверстие в корпусе под кассетой для привода обратной перемотки закрывалось заглушкой
- ↑ Моторный привод (рус.). Словарь фототерминов. Photorescue. Дата обращения 11 июля 2012. Архивировано 7 октября 2012 года.
- ↑ Фотограф, подаривший миру кинематограф (рус.) (недоступная ссылка). Фотографы мира. FotoIsland. Дата обращения 19 мая 2015. Архивировано 6 марта 2016 года.
- ↑ Всеобщая история кино, 1958, с. 77.
- ↑ 1 2 Борис Бакст. Leica. Парад совершенства (рус.). Статьи о фототехнике. Фотомастерские РСУ (12 сентября 2012). Дата обращения 25 апреля 2015.
- ↑ La lettre «O» (фр.). Leica Dictionnaire. Дата обращения 24 августа 2017.
- ↑ Stephen Gandy. Robot 1: Heinz Kilfitt’s 1934 Motorized Masterpiece (англ.). Camera Articles. Stephen Gandy’s CameraQuest (26 November 2003). Дата обращения 31 декабря 2015.
- ↑ Г. Абрамов. Из истории создания первого советского специального фотоаппарата «Аякс» (рус.). Камеры для разведцелей. Этапы развития отечественного фотоаппаратостроения. Дата обращения 16 ноября 2016.
- ↑ Фотомагазин, 2001, с. 114.
- ↑ 1 2 Фотоаппараты, 1984, с. 108.
- ↑ Георгий Абрамов. Послевоенный период. Часть II (рус.). История развития дальномерных камер. Photohistory. Дата обращения 10 мая 2015.
- ↑ История компании Nikon (рус.). Уроки фотографии. Nikon Fan. Дата обращения 10 марта 2013. Архивировано 11 марта 2013 года.
- ↑ Gray Levett. History of Nikon Part XVI (англ.). Nikon Owner Magazine. Дата обращения 8 января 2019.
- ↑ Nikon FE — Motor Drive (англ.). Modern Classic SLRs Series. Photography in Malaysia. Дата обращения 29 июня 2013. Архивировано 3 июля 2013 года.
- ↑ Хеджкоу, 2004, с. 115.
- ↑ 1 2 3 Моторный привод фотокамеры, 1986, с. 39.
- ↑ Motor MD-12 (рус.). Nikon. Дата обращения 11 июля 2012. Архивировано 7 октября 2012 года.
- ↑ Nikon F — Variations & Special Models (англ.). Modern Classic SLRs Series. Photography in Malaysia. Дата обращения 30 января 2013. Архивировано 2 февраля 2013 года.
- ↑ Canon F-1 High Speed Motor Drive Camera (англ.). Modern Classic SLRs Series. Photography in Malaysia. Дата обращения 24 сентября 2013.
- ↑ История «одноглазых». Часть 2 (рус.). PHOTOESCAPE. Дата обращения 26 июня 2013. Архивировано 1 июля 2013 года.
- ↑ Canon New F-1 High Speed Motor Drive Camera (англ.). Modern classic SLR series. Photography in Malaysia (2001). Дата обращения 11 июля 2012. Архивировано 7 октября 2012 года.
- ↑ Александр Жаворонков. Включаем ускоритель (рус.) (недоступная ссылка). EOS техника. Дата обращения 11 июля 2012. Архивировано 4 февраля 2012 года.
- ↑ Советское фото, 1988, с. 43.
- ↑ Г. Абрамов. «Зенит-4», «Зенит-5», 1964-1968, КМЗ (рус.). Этапы отечественного фотоаппаратостроения. Дата обращения 21 января 2013. Архивировано 4 февраля 2013 года.
- ↑ Фотомагазин, 2001, с. 113.
- ↑ Motor Drive MD-4 (рус.). Nikon. Дата обращения 11 июля 2012. Архивировано 7 октября 2012 года.
- ↑ Canon motor drive FN manual (англ.). Canon New F-1 — Its Motor Drive and the Power Winder. Photography in Malaysia. Дата обращения 8 марта 2013. Архивировано 14 марта 2013 года.
- ↑ Nikon Motor Drive MD-2. Instruction Manual (англ.). Nikon. Дата обращения 28 декабря 2013.
- ↑ Leo Foo. Nikon Professional Motor Drive MD-2 -Instruction Manual — Part III (англ.). Nikon F2 Series Models. Photography in Malaysia. Дата обращения 25 декабря 2013.
- ↑ Leo Foo. Motor Drive MD-3 for Nikon F2 Series Models — Part I (англ.). Modern Classic SLR Series. Photography in Malaysia. Дата обращения 25 декабря 2013.
- ↑ MD15 Motor Drive for the Nikon FA (англ.). Modern Classic SLRs Series. Photography in Malaysia. Дата обращения 25 декабря 2013.
- ↑ Dan Havlik. Here’s the New Canon EOS-1D X Mark II Firing Off 16fps Continuous Shooting Bursts (англ.). DSLR News. журнал «Shutterbug» (2 February 2016). Дата обращения 2 февраля 2016.
- Жорж Садуль. Всеобщая история кино / В. А. Рязанова. — М.,: «Искусство», 1958. — Т. 1. — 611 с.
- Елена Фисенко. Leica-Motor и другие (рус.) // «Фотомагазин» : журнал. — 2001. — № 1—2. — С. 112—116. — ISSN 1029-609-3.
- Джон Хеджкоу. Фотография. Энциклопедия / М. Ю. Привалова. — М.: «РОСМЭН-ИЗДАТ», 2004. — 264 с. — ISBN 5-8451-0990-6.
- М. Я. Шульман. Фотоаппараты / Т. Г. Филатова. — Л.,: «Машиностроение», 1984. — 142 с.
состав, классификация, преимущества, область применения
Jump to Navigation- Информация
- Производители
- Каталог
- Назад
- Насосное оборудование
- Насосы центробежные
- Apex Pumps
- Насосы винтовые
- Насосы высокого давления
- BFT
- GEA
- Погружные насосы
- Houttuin
- Vipom
- Горизонтальные насосы
- Apex Pumps
- GE Oil & Gas Pressure Control
- Houttuin
- Inoxihp
- Vipom
- Насосы герметичные
- Hermetic Pumpen
- Zenith
- Насосное оборудование прочее
- AX System
- Sanco
- Servi Group
- Насосы центробежные
- Фильтровальное оборудование
- Воздушные фильтры
- Jonell
- Масляные и гидравлические фильтры
- Parker Hannifin Corporation
- Servi Group
- Коалесцирующие фильтры
- ASCO Filtri
- Buhler Technologies
- EUROFILL
- Hydac
- Jonell
- Petrogas
- Scam Filltres
- Vokes Air
- Водоподготовка
- ASCO Filtri
- Grunbeck
- Фильтры КВОУ
- Осушители
- Воздушные фильтры
- Компрессорное оборудование
- Поршневые компрессоры
- GE Oil & Gas
- Винтовые компрессоры
- GEA
- Howden
- Stewart & Stevenson
- Центробежные компрессоры
- GE Thermodyn
- Stewart & Stevenson
- Поршневые компрессоры
- Трубопроводная арматура
- Запорная, регулирующая, запорно-регулирующая арматура
- Bifold Group
- Schroedahl
- Siekmann Econosto
- Zimmermann & Jansen (Z&J)
- Предохранительная арматура
- Anderson Greenwood
- Crosby
- Sapag Industrial valves
- Schroedahl
- Servi Group
- Приводы трубопроводной арматуры
- Biffi
- Keystone
- Запорная, регулирующая, запорно-регулирующая арматура
- Гидравлика
- Гидроцилиндры
- Servi Group
- Гидроклапаны
- Meggit
- Servi Group
- Гидронасосы
- Riverhawk
- Servi Group
- Гидрораспределители
- Servi Group
- Пневмоцилиндры
- Artec
- Mec Fluid 2
- Гидроцилиндры
- Станочное оборудование
- Станки шлифовальные
- Robbi
- Хонинговальные станки
- CAR srl
- Kadia
- Станки зубо- и резьбо- обрабатывающие
- Nagel Maschinen
- Карусельные станки
- Star Micronics
- Шпиндели и фрезерные головки
- Cytec
- Станки шлифовальные
- Приводная техника
- Электрические приводы
- Servi Group
- Гидравлические приводы
- Biffi
- Пневматические приводы
- Biffi
- Keystone
- Электромагнитные приводы
- Danfoss
- ECONTROL
- Kendrion
- Редукторы
- Renk
- VAR-SPE
- Турборедукторы
- Flender-Graffenstaden
- Renk
- Электрические приводы
- КИП (измерительное оборудование)
- Анализаторы влажности
- Belimo
- Scantech
- Приборы измерения уровня
- Endress+Hauser
- Приборы контроля и регулирования технологических процессов
- Clif Mock
- Itron
- S. Himmelstein
- Приборы измерения уровня расхода (расходомеры)
- Belimo
- Itron
- Servi Group
- Системы измерения неразрушающего контроля
- HBM
- Kavlico
- Marposs
- Устройства измерения температуры
- Autrol
- Belimo
- Servi Group
- VDO
- Устройства измерения давления
- Autrol
- Servi Group
- VDO
- Устройства измерения перемещения и положения
- Анализаторы влажности
- Лабораторное оборудование
- Микроскопия и спектроскопия
- Keyence
- Микроскопия и спектроскопия
- Электрооборудование
- Аккумуляторные батареи
- Hoppecke
- Противопожарное оборудование
- Sanco
- Spectrex
- Выключатели
- Metrol
- Источники питания
- LAM Technologies
- Кабели и коннекторы
- Axon’ Cable
- HiRel Connectors
- Murrplastik
- Лазеры
- RIO
- Лампы
- Nic
- Parat
- Серийные преобразователи
- LAM Technologies
- Электродвигатели
- Gamak Motors
- LAM Technologies
- Электроника
- DUCATI Energia
- JOVYATLAS
- Luvata
- Murrplastik
- Аккумуляторные батареи
- Прочее оборудование
- Абразивные изделия
- Abrasivos Manhattan
- Atto Abrasives
- Буровое оборудование
- BVM Corporation
- Den-Con Tool
- MI Swaco
- Top-co
- WestCo
- Валы
- GKN
- Jaure
- Rotar
- Вентиляторы
- Reitz
- Вибротехника
- JOST
- Газовые турбины
- Alba Power
- GE Energy
- Meggit
- Score Energy
- Siemens energy
- Solar turbines
- Горелки
- John Zink
- Зажимные устройства
- Restech Norway
- SPIETH
- Защита от износа, налипания, коррозии
- Rema Tip Top
- Инструмент
- Deprag
- Knipex
- Клапаны
- John Crane
- Mec Fluid 2
- Top-co
- Velan
- Versa
- W.T.A.
- Xomox
- Zimmermann & Jansen (Z&J)
- Крановое оборудование
- Facco
- Маркировочное оборудование
- Couth
- Espera
- Мельницы
- Eirich
- Металлообработка
- Agrati
- Муфты
- Coremo Ocmea
- Esco Couplings
- Jaure
- John Crane
- Kendrion Linnig
- Top-co
- ZERO-MAX
- Оси
- Jaure
- Подшипники
- John Crane
- NTN-SNR
- SPIETH
- Производственные линии
- Espera
- FIBRO
- Masa Henke
- Робототехника
- Motoman Robotics
- Системы обогрева
- Helios
- TYCO Thermal Controls
- Системы охлаждения
- Gohl
- Системы смазки
- Lincoln
- Строительные леса
- HAKI
- Сушильные печи
- Eirich
- Такелажное оборудование
- Casar
- Easy Mover
- Fetra
- Тормоза и сцепления
- Coremo Ocmea
- Упаковочное оборудование
- Espera
- Thimonnier
- Уплотнения
- Flexitallic
- John Crane
- Форсунки и эжекторы
- Exair
- Центраторы
- Top-co
- Электрографитовые щетки
- Morgan Advanced Materials
- Абразивные изделия
- AX System
- A.O. Smith – Century Electric
- A.S.T.
- Abrasivos Manhattan
- Advanced Energy
- Agilent Technologies
- Agrati
- Alba Power
- Algi
- Allweiler
- Alphatron Marine
- Amot
- Anderson Greenwood
- Apex Pumps
- Apollo Valves
- Ariana Industrie
- Ariel
- Artec
- ASCO Filtri
- Ashcroft
- ATAS elektromotory
- Atos
- Atto Abrasives
- Autrol
- Autronica
- Axis
- Axon’ Cable
- Bando
- Baruffaldi
- BAUER Kompressoren
- Belimo
- Berarma
- BFT
- BHDT
- Biffi
- Bifold Group
- Brinkmann pumps
- Buhler Technologies
- BVM Corporation
- Camfil FARR
- Campen Machinery
- CanaWest Technologies
- CAR srl
- Carif
- Casar
- CAT
- Celduc Relais
- Center Line
- Clif Mock
- Comagrav
- Compressor Controls Corporation
- CoorsTek
- Coral engineering
- Coremo Ocmea
- Couth
- CRANE
- Crosby
- Cubiscan
- Cytec
- Danaher Motion
- Danfoss
- Danobat Group
- David Brown Hydraulics
- Den-Con Tool
- DenimoTECH
- Deprag
- Destaco
- Dixon Valve
- Donaldson
- Donaldson осушители, адсорбенты
- DUCATI Energia
- Duplomatic
- Duplomatic Oleodinamica
- Dustcontrol
- Dynasonics
- E-tech Machinery
- Easy Mover
- Ebro Armaturen
- ECONTROL
- Eirich
- EMIT
- Endress+Hauser
- Esco Couplings
- Espera
- Estarta
- Euchner
- EUROFILL
- EuroSMC
- Exair
- Facco
- FANUC
- Farris
- Fema
- Ferjovi
- Fetra
- FIBRO
- Fisher
- Flender-Graffenstaden
- Flexitallic
- Flowserve
- Fluenta
- Flux
- FPZ
- Freudenberg
- Fritz STUDER
- Gali
- Gamak Motors
- GE Bently Nevada
- GE Energy
- GE Lufkin Industries
- GE Nuovo Pignone
- GE Oil & Gas
- GE Oil & Gas Pressure Control
- GE Panametrics
- GE Rotoflow
- GE Thermodyn
- GEA
- General Electric
- General Electric Waukesha
- GEORGIN
- GKN
- Gohl
- Goulds Pumps
- GPM Titan International
- Graco
- Grunbeck
- Grundfos
- Gustav Gockel
- HAKI
- Harting technology
- HAWE Hydraulik SE
- HBM
- Heimbach
- Helios
- Hermetic Pumpen
- Herose
- HiRel Connectors
- Hohner
- Holland-Controls
- Honsberg Instruments
- Hoppecke
- Horton
- Houttuin
- Howden
- Howden CKD Compressors s.r.o.
- HTI-Gesab
- Hydac
- Hydrotechnik
- IMO
- Inoxihp
- iNPIPE Products
- ISOG
- Italmagneti
- Itron
- ITW Dynatec
- Jaure
- JDSU
- Jenoptik
- John Crane
- John Zink
- Jonell
- JOST
- JOVYATLAS
- K-TEK
- Kadia
- Kavlico
- Kellenberger
- Kendrion
- Kendrion Linnig
- Keyence
- Keystone
- Kitagawa
- Knipex
- Knoll
- Kordt
- Krombach Armaturen
- KSB
- Kumera
- Labor Security System
- LAM Technologies
- Lapmaster Wolters
- Lincoln
- Luvata
- M.G.M. motori elettrici S.p.A.
- Mahle
- Marposs
- Masa Henke
- Masoneilan
- Mec Fluid 2
- MEDIT Inc.
- Meggit
- Mercotac
- Metrix
- Metrol
- MI Swaco
- Minco
- MMC International Corporation
- MOOG
- Moore Industries
- Morgan Advanced Materials
- Motoman Robotics
- Moyno
- Mud King
- MULTISERW-Morek
- Munters
- Murr elektronik
- Murrplastik
- Nagel Maschinen
- National Oilwell Varco
- Netzsch
- Nexoil srl
- Nic
- NOV Mono
- NTN-SNR
- Ntron
- O’Drill/MCM
- Oerlikon
- Oilgear
- Omal Automation
- Omni Flow Computers
- OMT
- Opcon
- Orange Research
- Orwat filtertechnik
- OTECO
- Pacific valves
- Pageris AG
- Paktech
- PALL
- Parat
- Parker Hannifin Corporation
- PENTAIR
- Peter Wolters
- Petrogas
- ProMinent
- Quick Soldering
- Reitz
- Rema Tip Top
- Renk
- Renold
- Repar2
- Resatron
- Resistoflex
- Restech Norway
- Revo
- Rexnord
- Rheonik
- Rineer Hydraulics
- RIO
- Riverhawk
- RMG Honeywell
- Robbi
- ROS
- Rota Engineering
- Rotar
- Rotork
- Ruhrpumpen
- S. Himmelstein
- Sanco
- Sapag Industrial valves
- Saunders
- Scam Filltres
- Scantech
- Schroedahl
- Score Energy
- Sermas Industrie
- Servi Group
- Settima
- Siekmann Econosto
- Siemens
- Siemens energy
- Simaco
- Solar turbines
- Solberg
- SOR
- Spectrex
- SPIETH
- SPX
- Stamford | AvK
- Star Micronics
- Stewart & Stevenson
- Stockham
- Sumitomo
- Supertec Machinery
- Tamagawa Seiki
- Tartarini
- TEAT
- Thimonnier
- Top-co
- Truflo
- Turbotecnica
- Tuthill
- TYCO Thermal Controls
- Vanessa
- VAR-SPE
- VDO
- Velan
- Versa
- Vibra Schultheis
- Vipom
- Vokes Air
- Voumard
- W.T.A.
- Warren
- Weatherford
- Weiss GmbH
- Wenglor
- WestCo
- Woodward
- Xomox
- Yarway
- Zenith
- ZERO-MAX
- Zimmermann & Jansen (Z&J)
Моторный привод (фото) — Википедия
Приставной электропривод Nikon MD12 для «компактного» семейства камер Nikon FM/FE/FA. На верхней крышке корпуса расположены контакты (слева), винт крепления к штативному гнезду фотоаппарата и полумуфта соединения с механизмом взвода. На ручке сверху находится кнопка электроспуска с кольцевым селектором режима протяжки Single/ContinuousМото́рный при́вод, реже Ва́йндер — механизм, предназначенный для автоматического взвода затвора фотоаппарата и перемещения фотоплёнки на следующий кадр. Такое устройство повышает оперативность съёмки по сравнению с ручным взводом и даёт возможность непрерывной съёмки серии кадров[1]. Первые моторные приводы были приставными и выполнялись как отдельное устройство, закрепляемое снизу фотоаппарата при помощи штативной гайки, и соединявшееся с ним через механическую муфту[* 1]. Моторные приводы выпускались, главным образом для малоформатных фотоаппаратов, получивших в середине XX века наибольшее распространение в профессиональной фотожурналистике, однако отдельные модели разрабатывались и для среднеформатных камер.
Эволюция автоматического взвода
Фотоаппарат «Robot»с пружинным приводом. 1934 год Фотоаппарат «Pentax LX» с электроприводом и кассетой на 250 кадров Фотоаппараты «Leica R4» (слева) и «Leicaflex SL2 Mot» с электроприводами Среднеформатная камера Pentax 645 со встроенным электроприводом
Устройства, пригодные для серийной фотосъёмки появились в период развития хронофотографии. Первым из таких приспособлений можно считать установку из 12 кабин с фотоаппаратами для съёмки бегущей лошади, созданную Эдвардом Мэйбриджем в 1874 году[2]. В компактном виде подобная технология впервые реализована Этьеном-Жюлем Марэ, создавшим в 1882 году фоторужьё, снимающее до 10 кадров в секунду на вращающуюся фотопластинку[3]. Дальнейшее развитие хронофотографии привело к созданию кинематографа, но совершенствование фоторепортажа и спортивной фотографии заставляло разработчиков обычных фотоаппаратов задумываться о повышении оперативности съёмки. Такие возможности появились с распространением рулонных фотоматериалов, и особенно 35-мм киноплёнки, ставшей основой для целого класса малоформатной аппаратуры.
Первые приводы для автоматической протяжки плёнки были механическими и работали от заводной пружины. Приставные пружинные вайндеры «Leica MOOLY» начали выпускать для малоформатных фотоаппаратов «Leica III» ещё до начала Второй мировой войны[4]. В 1936 году для этой камеры появился даже вайндер «Leica OOFRC» с дистанционным спуском[5]. Наибольшую известность из-за приспособленности к серийной и автоматической съёмке получили фотоаппараты серии «Robot» с квадратным кадром 24×24 мм на 35-мм киноплёнке. В 1934 году в Германии начат выпуск первой модели «Robot 1» со встроенным пружинным приводом, протягивавшим плёнку со скоростью до 4 кадров в секунду[6]. Фотоаппараты с пружинным приводом оказались хорошо приспособлены для скрытной съёмки, и быстро были приняты на вооружение спецслужбами. В СССР в 1948 году конструкторской лабораторией КГБ разработан полуформатный спецфотоаппарат «Аякс-8» с таким же приводом[7]. По аналогичному принципу построен и «гражданский» дальномерный фотоаппарат «Ленинград» с малоформатным кадром. Любительские шкальные камеры «ЛОМО-135ВС» и «ЛОМО-135М» оснащались такими же приводами, протягивавшими до 10 кадров от одного завода[8]. В 1958 году самым энергоёмким пружинным приводом обладал немецкий фотоаппарат «Robot Star 50», протягивавший от одного завода 50 кадров квадратного формата[9].
Однако, широкое распространение автоматической протяжки началось после появления достаточно компактных источников питания для электродвигателя. Впервые приставной электропривод был использован с фотоаппаратом «Leica 250», выпускавшимся для Люфтваффе. Подключение привода к бортовой электросети самолёта позволяло лётчикам вести фоторазведку, не отвлекаясь от управления самолётом[4]. Большинство аэрофотоаппаратов начали оснащать электроприводом ещё до войны, освободив экипаж от необходимости ручного взвода. Гражданское применение электроприводы получили в 1957 году на дальномерном фотоаппарате «Nikon SP»[10][11][12]. Первые устройства такого типа оснащались внешним блоком питания из-за громоздкости батарей, пригодных для скоростной протяжки плёнки. Сами приводы выполнялись съёмными из-за большого веса и шумности. Кроме того, в те годы почти все фотоаппараты были механическими и сохраняли возможность ручного взвода затвора курком при работе без мотора и электропитания. Это давало возможность отключать мотор в ситуациях, когда его шум недопустим. Благодаря наличию электромагнитного спуска в большинстве моторных приводов, их применение позволяло дистанционно запускать съёмку по проводам или радиопередатчику без ограничения количества снятых кадров[13].
С миниатюризацией электродвигателей и источников питания связано появление любительской разновидности электропривода — вайндера[* 2]. Этот тип привода отличался отсутствием электроспуска и, как следствие — невозможностью серийной съёмки и дистанционного управления. Вайндеры обеспечивали сравнительно невысокую скорость 1,5—2 кадра в секунду в покадровом режиме против серийной съёмки моторов с частотой 3—6 кадров в секунду. Фотограф мог в зависимости от задачи и возможностей использовать лёгкий вайндер или дорогой скоростной мотор, выпускавшиеся для одного и того же типа фотоаппарата. Некоторые системные камеры могли оснащаться 3—5 различными типами разработанных специально для этой модели вайндеров и моторов. Универсальных стандартов крепления моторных приводов не существовало. Приставные моторы и вайндеры выпускались для конкретных моделей или линеек фотоаппаратов и были редко взаимозаменяемы из-за несовпадения размеров и механических характеристик. Одно из редких исключений — моторный привод Nikon MD-12, пригодный для целой линейки камер Nikon: FM, FE, FA, FM2, FE2, а также FM3A[14]. Максимальная скорость протяжки при серийной съёмке у профессиональных моторов могла достигать 5—6 кадров в секунду. Первыми сверхскоростными фотоаппаратами в 1972 году стали Nikon F High Speed снимавший до 7 кадров в секунду с модифицированным мотором F36[15], и Canon F-1 High Speed с неподвижным полупрозрачным зеркалом и максимальной частотой 9 кадров в секунду[16][17]. Спустя 12 лет рекордная скорость съёмки до 14 кадров в секунду была достигнута в фотоаппарате Canon New F-1 High Speed также с неподвижным зеркалом[18].
В конце 1970-х годов появилась тенденция отказа от приставных моторов в любительских камерах и камерах среднего класса[* 3]. Привод начали встраивать непосредственно в фотоаппарат, одновременно убрав курок ручного взвода. Это упрощало и удешевляло механику камеры, сделав автовзвод доступным даже в «мыльницах». Такие фотоаппараты могли работать только от встроенного мотора, лишившись возможности взвода затвора без батарей. До конца 1980-х большинство профессиональных фотоаппаратов выпускались с приставными моторами, сохраняя механизм ручного взвода и возможность работы без электропитания. Однако, уже в 1988 году в профессиональной модели F4 корпорация Nikon установила встроенный моторный привод, исключив из кинематики взводной курок (однако, оставив рулетку ручной обратной перемотки). Примерно в это же время все производители фотоаппаратуры стали полностью отказываться от приставных моторов, сохранявших работоспособность фотоаппарата без элементов питания. Своё применение нашли батарейные рукоятки, иногда называвшиеся в обиходе «бустерами» (англ. Power Drive Booster)[19]. Такие рукоятки позволяли размещать дополнительные батареи, «разгоняя» встроенный мотор и увеличивая ресурс питания.
Из советских серийных камер с приставным вайндером могли работать только фотоаппараты «Алмаз-103» и «ЛОМО Компакт-Автомат», однако полноценное производство моторов для них так и не было развёрнуто, они существовали только в опытных разработках[20]. Единственным массовым типом камеры со встроенным электроприводом в СССР был «Зенит-5», выпущенный в 1960-х годах в количестве 11 тыс. 616 штук[21][* 4]. После этого советская промышленность серийно не выпускала моторных приводов для фотоаппаратов общего назначения. Автоматический перевод плёнки применялся в аэрофотоаппаратах (например, «ФКП-2» с электроприводом и электроспуском) и других специальных камерах[22]. В 2000-х годах в России встроенным мотором оснащался «Зенит-КМ» (2001—2005) и компактные фотоаппараты «Зенит» («Зенит-510», «Зенит-520», «Зенит-610», «Зенит-620», 2002—2002).
Устройство
Моторный привод фотоаппарата состоит из металлического или пластмассового корпуса, в котором размещаются электродвигатель и передаточный механизм. Химические батареи первых моторов размещались в отдельном блоке питания, выносном или присоединявшемся непосредственно к приводу. Миниатюризация электродвигателей и повышение компактности источников питания позволили в дальнейшем размещать их в общем корпусе. Моторы для механических камер оснащались электромагнитным спуском, приводящим в действие затвор через специальный толкатель, дублирующий спусковую кнопку фотоаппарата. Поэтому, большинство моторов имели специальный электрический разъём для подключения дистанционного управления. Все моторные приводы оснащались автоматикой остановки по окончании ролика плёнки, которая срабатывала при возрастании усилия протяжки выше определённого порога[* 5].
Моторные приводы профессиональных фотоаппаратов кроме взвода затвора и перемещения плёнки могли осуществлять её обратную перемотку в кассету по окончании ролика[8]. Такой функцией оснащалось большинство приставных моторов фотоаппаратов Nikon F2, Nikon F3 и Canon New F-1. Так, приводы MD-1 и MD-2 для модели F2, а также привод MD-4[23] для модели F3 оснащались специальной муфтой, вдвигавшейся через отверстие корпуса камеры во фланец кассеты и осуществлявшей быструю перемотку, уменьшая время перезарядки фотоаппарата[* 6]. Аналогичную конструкцию имел привод FN для камеры Canon New F-1[24]. С отказом от приставных моторов в пользу встроенных, моторизованная обратная перемотка стала стандартом для всех фотоаппаратов. Кроме того, большинство профессиональных приводов оснащались собственным дополнительным счётчиком кадров, который можно было настраивать на автоматическое отключение протяжки после любого кадра. Это необходимо для ограничения длины серий при дистанционной съёмке, а также на морозе и в других ситуациях, когда есть опасность обрыва перфорации при автоматическом останове. Кроме перечисленных органов управления, моторные приводы обладали собственной спусковой кнопкой, заменявшей при работе привода спусковую кнопку камеры, а также переключателем режимов протяжки[13]. Переключатель режимов обязательно имел два положения: S (англ. Single shot) для покадровой съёмки и C (англ. Continuous shooting) для непрерывной. В некоторых приводах была возможность плавной или ступенчатой регулировки скорости протяжки плёнки. В современных цифровых фотокамерах этим переключателям соответствует селектор выбора режима Drive Mode.
Первые приставные электроприводы обладали только механическими связями с фотоаппаратом, поэтому интервал между командой на спуск затвора и началом его последующего взвода был фиксирован, и при установке длинных выдержек (как правило, длиннее 1/60 секунды) требовалось включение пониженной скорости с увеличенной задержкой. В противном случае взвод затвора мог начаться раньше окончания выдержки и повредить механизм. Так, приводы MD-1 и MD-2 для камеры Nikon F2 обеспечивали стандартную частоту съёмки 4,3 кадра в секунду в диапазоне выдержек не длиннее 1/125[25]. Для съёмки на более длинных выдержках предусмотрены ещё три пониженных скорости, позволявшие расширить диапазон до 1/60, 1/8 и 1/4 секунды. Установка более длинной выдержки затвора, чем разрешённая, грозила его поломкой[26]. Регулировка скорости протяжки отсутствовала в более дешёвом приводе MD-3, и установка выдержек длиннее 1/80 секунды при серийной съёмке запрещалась инструкцией[27]. Дальнейшее совершенствование приставных моторов привело к появлению их электрической связи с фотоаппаратом, позволив автоматически учитывать длину выдержки[13]. При этом взвод начинался только после замыкания контактов, сигнализирующих об опускании зеркала, исключая поломку и освобождая фотографа от необходимости следить за согласованием выдержки со скоростью протяжки.
Зависимость частоты съёмки от выдержки с появлением автоматики не изменилась: максимальная скорость обеспечивается до выдержек не длиннее 1/125 секунды, замедляясь при более длинных. Эта зависимость справедлива и для современных цифровых фотоаппаратов, автовзвод затвора которых так же выполняется только после окончания выдержки. Кроме передачи информации о состоянии затвора и зеркала, электрическая связь использовалась для включения экспонометра, а также для подключения систем фотоаппарата к более мощной батарее мотора[28].
Цифровые фотоаппараты
Отсутствие плёнки и необходимости её перемотки в цифровом фотоаппарате, делает моторный привод ненужным. Перевод затвора во взведённое состояние не требует мощных электродвигателей и механизмов, и зачастую эту работу выполняет электромагнит, являющийся функциональной частью затвора. О плёночных моторах в цифровых камерах напоминает только селектор Drive mode, позволяющий регулировать частоту съёмки и выбирать между покадровым и серийным режимами. В этом же меню, как правило, находится включение автоспуска. От своих плёночных прототипов цифровая фототехника унаследовала батарейные рукоятки, уже широко применявшиеся на момент начала массового производства цифровых камер. Максимальная частота съёмки цифровых зеркальных фотоаппаратов ограничена инерцией зеркала, не превышая 14 кадров в секунду (Canon EOS-1D X Mark II). Более высокая скорость до 16 кадров в секунду достигается только при зафиксированном зеркале и выдержках не длиннее 1/250 секунды[29]. Беззеркальные фотоаппараты, способные отрабатывать выдержку регулировкой времени считывания заряда с матрицы, позволяют достигать любой частоты серийной съёмки, которая ограничена только длительностью выдержки.
См. также
Примечания
- ↑ В некоторых фотоаппаратах для присоединения моторного привода требовалось предварительно снимать нижнюю, а иногда и заднюю крышки камеры, как это было в Canon F-1 и Nikon F
- ↑ Иногда так называют пружинные приводы
- ↑ Это совпало с массовым внедрением электронно-управляемых затворов, которые без батарей также оказывались неработоспособны или отрабатывали единственную выдержку
- ↑ В «Зените-5» впервые в мире использован электропривод, встроенный непосредственно в корпус зеркальной камеры
- ↑ Усилие рассчитывалось исходя из применения профессиональных двухцилиндровых кассет с раскрывающейся щелью, или одноразовых кассет. При использовании отечественных типов плёнки, обычно заряжаемой в советские многоразовые кассеты вручную, часто требовался подбор кассет «с лёгким ходом»
- ↑ При снятом моторе отверстие в корпусе под кассетой для привода обратной перемотки закрывалось заглушкой
Источники
- ↑ Моторный привод (рус.). Словарь фототерминов. Photorescue. Проверено 11 июля 2012. Архивировано 7 октября 2012 года.
- ↑ Фотограф, подаривший миру кинематограф (рус.). Фотографы мира. FotoIsland. Проверено 19 мая 2015.
- ↑ Всеобщая история кино, 1958, с. 77.
- ↑ 1 2 Борис Бакст. Leica. Парад совершенства (рус.). Статьи о фототехнике. Фотомастерские РСУ (12 сентября 2012). Проверено 25 апреля 2015.
- ↑ La lettre «O» (фр.). Leica Dictionnaire. Проверено 24 августа 2017.
- ↑ Stephen Gandy. Robot 1: Heinz Kilfitt’s 1934 Motorized Masterpiece (англ.). Camera Articles. Stephen Gandy’s CameraQuest (26 November 2003). Проверено 31 декабря 2015.
- ↑ Г. Абрамов. Из истории создания первого советского специального фотоаппарата «Аякс» (рус.). Камеры для разведцелей. Этапы развития отечественного фотоаппаратостроения. Проверено 16 ноября 2016.
- ↑ 1 2 Фотоаппараты, 1984, с. 108.
- ↑ Фотомагазин, 2001, с. 114.
- ↑ Георгий Абрамов. Послевоенный период. Часть II (рус.). История развития дальномерных камер. Photohistory. Проверено 10 мая 2015.
- ↑ История компании Nikon (рус.). Уроки фотографии. Nikon Fan. Проверено 10 марта 2013. Архивировано 11 марта 2013 года.
- ↑ Nikon FE — Motor Drive (англ.). Modern Classic SLRs Series. Photography in Malaysia. Проверено 29 июня 2013. Архивировано 3 июля 2013 года.
- ↑ 1 2 3 Моторный привод фотокамеры, 1986, с. 39.
- ↑ Motor MD-12 (рус.). Nikon. Проверено 11 июля 2012. Архивировано 7 октября 2012 года.
- ↑ Nikon F — Variations & Special Models (англ.). Modern Classic SLRs Series. Photography in Malaysia. Проверено 30 января 2013. Архивировано 2 февраля 2013 года.
- ↑ Canon F-1 High Speed Motor Drive Camera (англ.). Modern Classic SLRs Series. Photography in Malaysia. Проверено 24 сентября 2013.
- ↑ История «одноглазых». Часть 2 (рус.). Статьи. PHOTOESCAPE. Проверено 3 июля 2014.
- ↑ Canon New F-1 High Speed Motor Drive Camera (англ.). Modern classic SLR series. Photography in Malaysia (2001). Проверено 11 июля 2012. Архивировано 7 октября 2012 года.
- ↑ Александр Жаворонков. Включаем ускоритель (рус.). EOS техника. Проверено 11 июля 2012. Архивировано 7 октября 2012 года.
- ↑ Советское фото, 1988, с. 43.
- ↑ Г. Абрамов. «Зенит-4», «Зенит-5», 1964-1968, КМЗ (рус.). Этапы отечественного фотоаппаратостроения. Проверено 21 января 2013. Архивировано 4 февраля 2013 года.
- ↑ Фотомагазин, 2001, с. 113.
- ↑ Motor Drive MD-4 (рус.). Nikon. Проверено 11 июля 2012. Архивировано 7 октября 2012 года.
- ↑ Canon motor drive FN manual (англ.). Canon New F-1 — Its Motor Drive and the Power Winder. Photography in Malaysia. Проверено 8 марта 2013. Архивировано 14 марта 2013 года.
- ↑ Nikon Motor Drive MD-2. Instruction Manual (англ.). Nikon. Проверено 28 декабря 2013.
- ↑ Leo Foo. Nikon Professional Motor Drive MD-2 -Instruction Manual — Part III (англ.). Nikon F2 Series Models. Photography in Malaysia. Проверено 25 декабря 2013.
- ↑ Leo Foo. Motor Drive MD-3 for Nikon F2 Series Models — Part I (англ.). Modern Classic SLR Series. Photography in Malaysia. Проверено 25 декабря 2013.
- ↑ MD15 Motor Drive for the Nikon FA (англ.). Modern Classic SLRs Series. Photography in Malaysia. Проверено 25 декабря 2013.
- ↑ Dan Havlik. Here’s the New Canon EOS-1D X Mark II Firing Off 16fps Continuous Shooting Bursts (англ.). DSLR News. журнал «Shutterbug» (2 February 2016). Проверено 2 февраля 2016.
Литература
- Жорж Садуль. Всеобщая история кино / В. А. Рязанова. — М.,: «Искусство», 1958. — Т. 1. — 611 с.
- Елена Фисенко. Leica-Motor и другие (рус.) // «Фотомагазин» : журнал. — 2001. — № 1—2. — С. 112—116. — ISSN 1029-609-3.
- М. Я. Шульман. Фотоаппараты / Т. Г. Филатова. — Л.,: «Машиностроение», 1984. — 142 с.
Электрические приводы. Виды и устройство. Применение и работа
Электропривод – электромеханическая система, служащая для привода в движение функциональных органов машин и агрегатов для выполнения определенного технологического процесса. Электрические приводы состоят из электродвигателя, устройства преобразования, управления и передачи.
С прогрессом промышленного производства электрические приводы заняли в быту и на производстве лидирующую позицию по числу электродвигателей и общей мощности. Рассмотрим структуру, типы, классификацию электроприводов, и предъявляемые к нему требования.
Устройство
1 — Передний крепеж
2 — Винтовая передача
3 — Концевой датчик
4 — Электродвигатель
5 — Зубчатая передача
6 — Задний крепеж
Функциональные компоненты
- Р – регулятор служит для управления электроприводом.
- ЭП – электрический преобразователь служит для преобразования электроэнергии в регулируемую величину напряжения.
- ЭМП – электромеханический преобразователь электричества в механическую энергию.
- МП – механический преобразователь способен изменять быстродействие и характер движения двигателя.
- Упр – управляющее действие.
- ИО – исполнительный орган.
Функциональные части
- Электропривод.
- Механическая часть.
- Система управления.
Исполнительный механизм является устройством, которое смещает рабочую деталь по поступающему сигналу от управляющего механизма. Рабочими деталями могут быть шиберы, клапаны, задвижки, заслонки. Они изменяют количество поступающего вещества на объект.
Рабочие органы могут двигаться поступательно, вращательно в определенных пределах. С их участием производится воздействие на объект. Чаще всего электропривод с исполнительным механизмом состоят из электропривода, редуктора, датчиков положения и узла обратной связи.
Сегодня электрические приводы модернизируются по их снижению веса, эффективности действия, экономичности, долговечности и надежности.
Свойства привода
- Статические. Механическая и электромеханическая характеристика.
- Механические. Это зависимость скорости вращения от момента сопротивления. При анализе динамических режимов механические характеристики полезны и удобны.
- Электромеханические. Это зависимость скорости вращения от тока.
- Динамические. Это зависимость координат электропривода в определенный момент времени при переходном режиме.
Классификация
Электрические приводы обычно классифицируются по различным параметрам и свойствам, присущим им. Рассмотрим основные из них.
По виду движения:
- Вращательные.
- Поступательные.
- Реверсивные.
- Возвратно-поступательные.
По принципу регулирования:
- Нерегулируемый.
- Регулируемый.
- Следящий.
- Программно управляемый.
- Адаптивный. Автоматически создает оптимальный режим при изменении условий.
- Позиционный.
По виду передаточного устройства:
- Редукторный.
- Безредукторный.
- Электрогидравлический.
- Магнитогидродинамический.
По виду преобразовательного устройства:
- Вентильный. Преобразователем является транзистор или тиристор.
- Выпрямитель-двигатель. Преобразователем является выпрямитель напряжения.
- Частотный преобразователь-двигатель. Преобразователем является регулируемый частотник.
- Генератор-двигатель.
- Магнитный усилитель-двигатель.
По методу передачи энергии:
- Групповой. От одного мотора через трансмиссию приводятся в движение другие исполнительные органы рабочих машин. В таком приводе очень сложное устройство кинематической цепи. Электрические приводы такого вида являются неэкономичными из-за их сложной эксплуатации и автоматизации. Поэтому такой привод сегодня не нашел широкого применения.
- Индивидуальный. Он характерен наличием у каждого исполнительного органа отдельного электродвигателя. Такой привод является одним из основных на сегодняшний день, так как кинематическая передача имеет простое устройство, улучшены условия техобслуживания и автоматизации. Индивидуальный привод нашел популярность в современных механизмах: сложных станках, роботах-манипуляторах, подъемных машинах.
- Взаимосвязанный. Такой привод имеет несколько связанных электроприводов. При их функционировании поддерживается соотношение скоростей и нагрузок, а также положение органов машин. Взаимосвязанные электрические приводы необходимы по соображениям технологии и устройству. Для примера можно назвать привод ленточного конвейера, механизма поворота экскаватора, или шестерни винтового пресса большой мощности. Для постоянного соотношения скоростей без механической связи применяется схема электрической связи нескольких двигателей. Такая схема получила название схемы электрического вала. Такой привод используется в сложных станках, устройствах разводных мостов.
По уровню автоматизации:
- Автоматизированные.
- Неавтоматизированные.
- Автоматические.
По роду тока:
- Постоянного тока.
- Переменного тока.
По важности операций:
- Главный привод.
- Вспомогательный привод.
Подбор электродвигателя
Чтобы приводы производили качественную работу, необходимо правильно выбрать электрический двигатель. Это создаст условия долгой и надежной работы, а также повысит эффективность производства.
При подборе электродвигателя для привода агрегатов целесообразно следовать некоторым советам по:
- Требованиям технологического процесса выбирают двигатель с соответствующими характеристиками, конструктивного исполнения, а также метода фиксации и монтажа.
- Соображениям экономии подбирают надежный, экономичный и простой двигатель, который не нуждается в больших расходах на эксплуатацию, имеет малый вес, низкую цену и небольшие размеры.
- Условиям внешней среды и безопасности подбирают соответствующее исполнение мотора.
Правильный подбор электродвигателя обуславливает технико-экономические свойства всего привода, его надежность и длительный срок работы.
Преимущества
- Возможность более точного подбора мощности двигателя для электропривода.
- Электрический мотор менее пожароопасен в отличие от других типов двигателей.
- Приводы дают возможность быстрого пуска и остановки механизма, его плавного торможения.
- Нет необходимости в специальных регуляторах питания для электродвигателя. Все процессы происходят в автоматическом режиме.
- Приводы дают возможность подбора мотора, свойства которого лучше других моделей сочетаются с характеристиками агрегата.
- С помощью электрического привода можно плавно регулировать обороты механизма в определенных пределах.
- Электродвигатель может преодолеть большие и долговременные перегрузки.
- Электропривод дает возможность получения максимальной скорости и производительности рабочего механизма.
- Электродвигатель дает возможность экономить электричество, а при определенных условиях даже генерировать ее в сеть.
- Полная и простая автоматизация установок и механизмов возможна только с помощью электроприводов.
- КПД электромоторов имеет наибольший показатель по сравнения с другими моделями двигателей.
- Моторы производят с повышенной уравновешенностью. Это дает возможность встраивания их в механизмы машин, делать менее массивным фундамент.
Инновационные электрические приводы все автоматизированы. Системы управления приводом дают возможность рационального построения технологических процессов, увеличить производительность и эффективность труда, оптимизировать качество продукции и уменьшить ее цену.
Технические требования
К любым техническим механизмам и агрегатам предъявляются определенные требования технического плана. Не стали исключением и электроприводы. Рассмотрим основные предъявляемые к ним требования.
Надежность
В соответствии с этим требованием привод должен исполнять определенные функции и заданных условиях в течение некоторого интервала времени, с расчетной вероятностью работы без возникновения неисправностей.
При невыполнении этих требований остальные свойства оказываются бесполезными. Надежность может значительно отличаться в зависимости от характера работы. В некоторых механизмах не требуется долгого времени работы, однако отказ механизма не должен иметь место. Такой пример можно найти в военной промышленности. И другой пример, где наоборот, время службы должно быть большим, а отказ устройства вполне возможен, и не приведет к серьезным последствиям.
Точность
Это требование связано с отличием показателей от заданных. Они не могут превышать допустимые величины. Электроприводы должны обеспечивать перемещение рабочего элемента на определенный угол или за некоторое время, а также поддерживать на определенном уровне скорость, ускорение или момент вращения.
Быстродействие
Это качество привода обеспечивает быструю реакцию на разные воздействия управления. Быстродействие связано с точностью.
Качество
Такая характеристика обеспечивает качество процессов перехода, исполнение определенных закономерностей их выполнения. Качественные требования создаются вследствие особенностей работы машин с электроприводами.
Энергетическая эффективность
Любые производственные процессы преобразования и передачи имеют потери энергии. Наиболее важным это качество стало в применении электроприводов механизмов, приводах значительной мощности, долгим режимом эксплуатации. Эффективность использования энергии определяется КПД.
Совместимость
Электрические приводы должны совмещаться с работой аппаратуры, в которой они применяются, с их системой снабжения электроэнергией, информационными данными, а также с рабочими элементами. Наиболее остро стоит требование совместимости электроприводов для медицинской и бытовой техники, в радиотехнике.
Похожие темы:
Электрический привод — Википедия
Электрический привод (сокращённо — электропривод, ЭП) — управляемая электромеханическая система, предназначенная для преобразования электрической энергии в механическую и обратно и управления этим процессом.
Современный электропривод — совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %)[1] и главным источником механической энергии в промышленности.
В ГОСТ Р 50369-92 электропривод определён как электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса[2].
Как видно из определения, исполнительный орган в состав привода не входит. Однако авторы авторитетных учебников[1][3] включают исполнительный орган в состав электропривода. Это противоречие объясняется тем, что при проектировании электропривода необходимо учитывать величину и характер изменения механической нагрузки на валу электродвигателя, которые определяются параметрами исполнительного органа. При невозможности реализации прямого привода электродвигатель приводит исполнительный орган в движение через кинематическую передачу. КПД, передаточное число и пульсации, вносимые кинематической передачей, также учитываются при проектировании электропривода.
Электропривод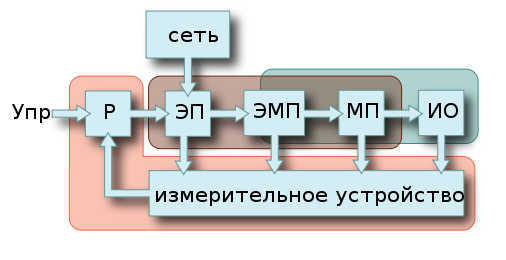
Функциональные элементы:
- Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
- Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
- Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
- Механический преобразователь (МП) может изменять скорость вращения двигателя.
- Упр — управляющее воздействие.
- ИО — исполнительный орган.
Функциональные части:
- Силовая часть или электропривод с разомкнутой системой регулирования.
- Механическая часть.
- Система управления электропривода[4].
Статические характеристики[править | править код]
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика[править | править код]
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.[1]
Электромеханическая характеристика двигателя[править | править код]
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика[править | править код]
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
По количеству и связи исполнительных, рабочих органов:
Классификация электроприводов по степени их автоматизации рабочих машин и механизмов и качеству выполняемых операций- Индивидуальный, в котором рабочий исполнительный орган приводится в движение одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления:
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения:
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока:
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций:
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
- Привод передач.
Автоматизированные электроприводы подразделяются еще на две подгруппы — разомкнутые и замкнутые. Работа разомкнутого привода заключается в том, что все внешние возмущения (для электрических приводов самым характерным из них является момент нагрузки) оказывают влияние на выходную переменную электрического привода, как пример — на его скорость. Иными словами, разомкнутый электрический привод не изолирован от влияния внешних возмущений, все изменения которых отражаются на его рабочих показателях. В разомкнутом приводе по этой причине не может обеспечиться высокий уровень качества регулирования переменных, хотя данный привод отличается простой схемой.
Основным отличием замкнутых электрических приводов является их общее или локальное удаление воздействий внешних возмущений на управляемую переменную электрического привода. В качестве примера можно привести тот факт что, скорость таких электрических приводов может оставаться практически неизменной при возможных колебаниях момента нагрузки. В силу этого обстоятельства замкнутый привод обеспечивает более качественное управление движением исполнительных органов, хотя его схемы являются более сложными и требуют, зачастую, применения силовых преобразователей энергии.
Замкнутый электропривод[править | править код]
Структура замкнутых электроприводов: а — с компенсацией возмущения; б — с обратной связью.Замкнутый электрический привод может быть построен по принципам отклонения с использованием обратных связей или компенсации внешнего возмущения.
Принцип компенсации мы можем рассмотреть на примере компенсации наиболее явно выраженного внешнего возмущения электропривода — момента нагрузки Мс при регулировании его скорости (рис.а).Основным признаком такой замкнутой структуры электрического привода является наличие цепи, по которой на вход привода вместе с задающим сигналом скорости подается сигнал UM = kMMQ, пропорциональный моменту нагрузки Мс. В результате этого управление ЭП осуществляется суммарным сигналом ошибки, который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
Несмотря на свою высокую эффективность, электрические приводы по данной схеме выполняются крайне редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия).В связи с данным фактом подавляющее количество замкнутых структур электроприводов используют принцип обратной связи (отклонения). Он характеризуется тем что имеет цепь обратной связи, соединяющую выход электрического привода с его входом, отсюда и пошло название замкнутых схем.
Все виды применяемых в замкнутых электрических приводах обратных связей делятся на положительные и отрицательные, жесткие и гибкие, линейные и нелинейные.
Положительной называется обратная связь, в которой сигнал направлен согласно и складывается, с управляющим сигналом, в то время как сигнал отрицательной связи направлен в противоположную сторону (знак «минус» на рис. б).Жесткая обратная связь охарактеризована тем, что данная связь действует как в установившемся режиме, так и в переходном режиме электрического привода. Сигнал гибкой обратной связи производится только в переходных режимах электропривода и используется для обеспечения требуемого им качества, как пример устойчивости движения, допустимого перерегулирования и т.д.
Линейная обратная связь охарактеризована своей пропорциональной зависимостью между управляемой координатой и сигналом обратной свﮦязﮦи, в то время как при производстве нелинейной связи эта зависимость не будет пропорциональной.
Для регулирования движения исполнительных органов эксплуатируемых машин иногда требуется изменять несколько переменных электрического привода, например ток, момент и скорость. В таком случае замкнутые приводы создаются по одной из следующих структурных схем.
Электропривод с общим усилителем[править | править код]
Схема электропривода с общим усилителем.Схема с общим усилителем представлена на рисунке справа в качестве примера, данная схема является схемой регулирования двух переменных двигателя, где Д — скорости тока I. Схема содержит в себе силовой преобразователь электроэнергии П, устройство управления УУ, механическую передачу МП и датчики тока ДТ, скорости ДС и устройство токоограничения (токовой отсечки) УТО. Данная схема обеспечивает хорошую характеристику двигателя. На интервале скорости 0 — СOj за счет действия обратной связи по току (сигнал U) обеспечивается ограничение тока и момента двигателя и характеристика имеет близкий к вертикальному участок. При скорости Со > 00j узел УТО заканчивает действие связи по току и за счет наличия обратной связи по скорости (ОСС) (сигнал U ОCC) характеристика двигателя становится жестче ,что обеспечивает регулирование скорости.
Совокупность обратных связей, число которых может быть от двух и более, в схеме с единым усилителем образует своего рода модальный регулятор, а переменные при этом называются переменными состояния электропривода. Главной задачей модального регулятора можно считать обеспечение заданного качества динамических процессов в электроприводе — быстродействия, устойчивости и степени затухания переходных процессов. Это достигается выбором видов и соответствующим исследованием коэффициентов обратных связей по переменным электрического привода. Следует отметить, что система с суммирующим усилителем относится к системам управления с так называемой параллельной коррекцией.
Электропривод с наблюдающим устройством[править | править код]
Схема электропривода с наблюдающим устройствомВ сложных системах электроприводов, имеющих, в частных случаях, разветвленные кинематические цепи с упругими элементами, множество регулируемых переменных может оказаться весьма высоким. При данном факте измерение некоторых из них имеет некоторые затруднения по тем или иным причинам. В таких случаях прибегают к использованию так называемых наблюдающих устройств (наблюдателей).
Основную часть наблюдателя формируют совокупности моделей звеньев электрического привода, выполненных на основе операционных усилителей или элементов микропроцессорной техники. Выходные сигналы (напряжения) этих моделей, параметры которых соответствуют реально существующим звеньям электропривода, отображают близкие значения переменных.
Эксплуатация с применением наблюдателя на примере регулирования угла поворота вала двигателя поясняет структурная схема на рисунке 6, на которой приняты следующие обозначения: Д — двигатель, П — преобразователь, УУ — управляющее устройство, МП — механическая передача, НУ — наблюдающее устройство.
Электрический привод применяется для управления положением исполнительного органа φио. Это достигается соответствующим регулированием угла поворота φ вала двигателя, при котором необходимо также регулирование и других переменных — тока I, момента М и скорости двигателя.
Для применения рассматриваемого принципа управления, сигнал задания угла поворота фз подается на устройство управления УУ и одновременно на вход наблюдающего устройства НУ. Наблюдающее устройство НУ вырабатывает с помощью моделей звеньев привода сигналы, пропорциональные току, моменту и скорости, и направляет их устройству управления УУ.
Так же следует отметить, что модели звеньев не в состоянии учесть всех реальных возмущений, воздействующих на электрический привод и электрическую машину, и нестабильности параметров ЭП, НУ выдает в управляющее устройство не точные выражения переменных, а их оценки, что обозначено на схеме звездочкой «*».
Электропривод с подчиненной системой координат[править | править код]
Схема электропривода с подчиненным регулированием координатДля увеличения точности получаемых оценок переменных состояния может применяться корректирующая обратная связь по управляемой переменной, показанная выше штриховой линией. В данном случае значение выходной управляемой переменной ф сравнивают при помощи обратной связи с ее оценкой ф* и только затем в функции ошибки (выявленного отклонения) Дф корректируют показания отдельных моделей.
Структура с подчиненным управлением координат отличается тем, что в данной структуре регулирование каждой отдельной координаты осуществляется отдельными регуляторами — тока РТ и скорости PC, которые в свою очередь совместно с соответствующими обратными связями формируют замкнутые контуры. Они встраиваются таким образом, что входным, задающим сигналом для внутреннего контура тока U является выходной сигнал внешнего по отношению к нему контура скорости. Исходя из этого, внутренний контур тока зависит от внешнего контура скорости — основной управляемой координате электрического привода.
Главное достоинство схемы изображенной на рисунке заключается в возможности эффективной настройки управления каждой переменной как в статичном, так и в динамичном режимах, в силу чего она представляет из себя в настоящее время основу применение в электроприводе. Кроме того, зависимость контура тока от контура скорости позволяет простыми методами осуществлять ограничение тока и момента, для чего достаточно ограничить на соответствующем уровне сигнал на выходе регулятора скорости (он же — сигнал задания тока)
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
- ↑ 1 2 3 Ильинский Н. Ф. Основы электропривода: Учебное пособие для вузов. — 2-е изд., перераб. и доп. — М.: Издательство МЭИ, 2003. — С. 220. — ISBN 5-7046-0874-4.
- ↑ Электроприводы. Термины и определения.-М.- Издательство стандартов. −1993 [1]
- ↑ Онищенко Г.Б. Электрический привод. — М.: Академия, 2003.
- ↑ Анучин А.С. Системы управления электроприводов. — Москва: Издательский дом МЭИ, 2015. — 373 с. — ISBN 978-5-383-00918-5.
- Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — ISBN 5-7695-2306-9.
- Москаленко, В.В. Электрический привод. — 2-е изд. — М.: Академия, 2007. — ISBN 978-5-7695-2998-6.
- Зимин Е. Н. и др. Электроприводы постоянного тока с вентильными преобразователями. Ленинград, Издательство «Энергоиздат», Ленинградское отделение, 1982
- Чиликин М. Г., Сандлер А. С. Общий курс электропривода. — 6-е изд. — М.: Энергоиздат, 1981. — 576 с.
- Тищенко О. Ф. Элементы приборных устройств. — М.: Высшая школа, 1982. — 263 с.