


| Асинхронные двигатели — теория — Понятие момента | |||
| 25.10.2012 19:13 | |||
Прежде чем изложить и проанализировать формулы для вычисления пускового момента вспомним что это такое. Под пусковым моментом понимают момент на валу двигателя при определенных условиях. Ключевыми условиями являются равенство нулю скорости вращения ротора, установившееся значение тока и номинальное напряжение на обмотках двигателя. Подробнее про пусковой момент асинхронного электрического двигателя. Кпуск — кратность пускового момента заданная в паспорте на двигатель. В теоретических изысканиях может быть полезна следующая формула: Мпуск = 9,55*Р2*1000/Н1 где Р2 — отдаваемая мощность, кВт Н1 — частота вращения ротора, об/мин При этом Р2 можно посчитать по следующей формуле: Р2=(1,732*U1*I1пуск)/S*1000 где U1 — подводимое напряжение, В I1пуск — пусковой ток, А Эти формулы дают возможность понять за счет чего можно повысить пусковой момент. Первый вариант увеличение за счет увеличения пускового тока. Второй вариант увеличение за счет повышения напряжения питания. Другие статьи по теме:
|
Выражения момента асинхронного электродвигателя
Эквивалентная схема асинхронного электродвигателя, рассмотренная в предыдущей статье, дает возможность получить выражение электромагнитного момента, который развивает асинхронный электродвигатель. Мощность, которая потребляется электрической машиной из сети, будет расходоваться не только на полезную работу, но и потери в контуре намагничивания и в обмотках.
Поэтому выражение мощности будет иметь вид:

На основании формулы (1) можно получить такое уравнение:

В свою очередь мощность электромагнитную можно выразить и таким способом:

Из выше перечисленных уравнений можем получить значение электромагнитного момента:

Помножив знаменатель и числитель этого выражения на S2 и в целях упрощения вида уравнения примем значение Хк = Х1 + Х2/. Хк – сопротивление индуктивное асинхронного электродвигателя при коротком замыкании:

Для упрощения записи, как в равенстве (5), индекс «эм» будет пропускаться.
Момент электромагнитный асинхронной машины представляет собой довольно сложную функцию скольжения S. Для того, чтоб найти максимум момента асинхронной машины приравняем производную S нулю:

Производная станет равна нулю только в том случае, если стоящий в скобках числителя множитель равен будет нулю:

Или же:

Откуда можно выразить скольжение:

Sк называют критическим, так как при переходе S = Sк момент двигателя уменьшится. Это происходит из-за того, что при увеличении роторного тока (S > Sк) его активная часть не вырастет, а наоборот, уменьшится, что в свою очередь приведет к снижению момента.
Если Sк положительно – это режим работы двигательный, а если отрицательный – генераторный.
В асинхронных машин большой мощности r1 значительно меньше, чем Хк, и, как правило, лежит в пределах r1 = 0,1 – 0,12Хк. Поэтому величина r12 существенно мала, по сравнению Хк, и ею можно пренебречь без ущерба для точности:

Подставив положительные значения Sк (6) в выражение (5), найдем значение критического момента для двигательного режима:

Раскрыв скобки в знаменателе (8) и сократив дробь  величине Мкд получим:
величине Мкд получим:

Для машин большой мощности для которых величиной r1 можно пренебречь выражение (9) примет вид:

Аналогичным образом получается значение критического момента для генераторного режима:

Отношение моментов генераторного и двигательного режимов работы АД:

Поделив числитель и знаменатель на и обозначив соотношение  выражение (12) примет вид:
выражение (12) примет вид:

Также ε можно еще выразить как:

Так как асинхронные электродвигатели обычно имеют r1

Из выражений (12) и (13) можно увидеть, что в генераторном режиме значение критического момента будет больше, чем в двигательном. Это объясняется влиянием падения напряжения в активном сопротивлении статорной обмотки.
Отношение момента электромагнитного, к его критическому значению в двигательном режиме Мдк = Мк, будет иметь вид:

Откуда выражаем:

Данное выражение представляет собой уточненное уравнение механической характеристики асинхронного электродвигателя.
Если принять, как это делалось выше, r1 = 0, то тогда ε = 0 и взамен (15) получим упрощенное уравнение для механической характеристики:

М, выраженный формулами (5), (15) и (16), является функцией скольжения S. Задаваясь различными значениями скольжения S можно построить механическую характеристику асинхронной машины.
Ниже показана механическая характеристика построенная по формуле (15):

Для машин асинхронных трехфазных с короткозамкнутым ротором общего применение мощностью 0,6 – 100 кВт соотношение  должны лежать в пределах 1,7 – 2,2; причем большее значение соответствует большей скорости вращения ротора 3000 об/мин, а меньшее — 750 об/мин. Для машин мощность свыше 100 кВт должны иметь λм = 1,7 – 1,8. Для крановых и металлургических:
должны лежать в пределах 1,7 – 2,2; причем большее значение соответствует большей скорости вращения ротора 3000 об/мин, а меньшее — 750 об/мин. Для машин мощность свыше 100 кВт должны иметь λм = 1,7 – 1,8. Для крановых и металлургических:

Уравнения (15) и (16) имеют значительное преимущество перед уравнением (5) в том, что нет необходимости знать параметры обмоток асинхронной машины и можно вести расчет по каталожным данным электродвигателя.
Но в каталожных данных значение критического скольжения не приводится и их приходится определять из соотношений (15) и (16), используя значения перегрузочных способностей машин λм.
Записав уравнение механической характеристики для Мном получим:

Использовав приближенное равенство ε ≈ Sк, получим:

Данное равенство можно представить в виде квадратного уравнения относительно Sк:

Решив его:

В электрических двигателях большой мощности ε ≈ 0 и уравнение для Sк будет иметь вид более простой:

В выражениях (17) и (18) перед корнем следует брать знак плюс, так как отрицательный знак соответствует нахождению точки Sном, Мном на механической характеристике в зоне где S>Sк. Практического применения данный случай не имеет, поэтому второе решение отбрасывается.
Приведенные выше механические характеристики (5), (15), (16) справедливы только при оговоренных выше ограничениях. Асинхронные электродвигатели имеющие фазный ротор имеют характеристики достаточно точно описываемые данными уравнениями. В машинах с короткозамкнутым ротором имеется процесс вытеснения тока в стержнях ротора. Следствием чего становится непостоянство их параметров и механические характеристики могут значительно отличатся от построенных по формулам (5), (15), (16). Однако от этого данные формулы (особенно (15), (16)) не теряют своего значения, так как благодаря своей простоте они позволяют производить многие расчеты и делать общие заключения о работе асинхронных машин. В случаях когда необходима большая точность применяют экспериментально снятые или специально рассчитанные механические характеристики.
В качестве примера ниже показаны механические характеристики некоторых типов электродвигателей с КЗ ротором:

6. Электромагнитный момент асинхронного двигателя
Момент, развиваемый двигателем равен электромагнитной мощности, деленной на синхронную скорость вращения электропривода.
M = Pэм/ω0
Электромагнитная мощность – это мощность, передаваемая через воздушный зазор от статора к ротору, и она равна потерям в роторе, которые определяются по формуле:
Pэм = m • I22 • (r2’/s)
m – число фаз.
M = Mэм = (Pm/ω0) • (I2’)2 • (r2’/s)
Электромеханической характеристикой асинхронного двигателя является зависимость I2’ от скольжения. Но так как асинхронная машина работает только в качестве электродвигателя, основной характеристикой является механическая характеристика.
M = Mэм = (Pm/ω0) • (I2’)2 • (r2’/s) – упрощенное выражение механической характеристики.
Подставив в это выражение значение тока, получим: M = [P•3•Uф2•(r2’/s)] / [ω0•[(r1 + r2’/s)2 + (x1 + x2’)2]]
Будем считать, что m=3.
Ω = ω0/p
Вместо ω0 нужно подставить механическую скорость, в результате чего число пар полюсов сокращается.
M = [3•Uф2•(r2’/s)] / [ω0•[(r1 + r2’/s)2 + (x1 + x2’)2]] – это уравнение механической характеристики асинхронного двигателя.
При переходе асинхронного двигателя в генераторный режим, скорость вращения ω > ω0 и скольжение становится отрицательным (s Когда скольжение изменяется от 0 до +∞, режим называется «режимом электромагнитного тормоза».
Задаваясь значениями скольжения от о до +∞, получим характеристику:
 Полная
механическая характеристика асинхронного
двигателя.
Полная
механическая характеристика асинхронного
двигателя.
Как видно из механической характеристики, она имеет два экстремума: один на отрезке изменения скольжения на участке от 0 до +∞, другой на отрезке от 0 до -∞. dM/ds=0
Mmax = [3•Uф2•(r2’/s)] / [2ω0•[r1 ± √(r12 + (x1 + x2’)2)]] + относится к двигательному режиму. – относится к генераторному режиму.
Mmax=Mкр Mкр – критический момент.
Скольжение, при котором момент достигает максимума, называется критическим скольжением, и оно определяется по формуле: sкр = ±[r2’/(x1+x2’)]
Критическое скольжение имеет одинаковое значение и в двигательном и в генераторном режимах.
Величину Mкр можно получить, подставив в формулу момента значение критического скольжения.
Момент при скольжении равном 1 называется пусковым моментом. Выражение для пускового момента можно получить, подставив 1 в формулу:
Mп = [3•Uф2•r2’] / [ω0•[(r1 + r2’)2 + (x1 + x2’)2]]
Поскольку знаменатель в формуле момента максимального на несколько порядков больше Uф, принято считать Mкр≡Uф2.
Критическое скольжение зависит от величины активного сопротивления обмотки ротора R2’. Момент пусковой, как видно из формулы, зависит от активного сопротивления ротора r2’. это свойство пускового момента используется в асинхронных двигателях с фазным ротором, у которых пусковой момент увеличивают путем введения активного сопротивления в цепь ротора.
7.Холостой ход трансформатора
Режимом
холостого хода трансформатора называют
режим работы при питании одной из обмоток
трансформатора от источника с переменным
напряжением и при разомкнутых цепях
других обмоток. Такой режим работы может
быть у реального трансформатоpa, когда
он подключен к сети, а нагрузка, питаемая
от его вторичной обмотки, еще не включена.
По первичной обмотке трансформатора
проходит ток I0,
в то же время во вторичной обмотке тока
нет, так как цепь ее разомкнута. Ток I0,
проходя по первичной обмотке, создает
в магнитопроводе синусоидально
изменяющийся лоток Ф0,
который из-за магнитных потерь отстает
по фазе от тока на угол потерь δ. 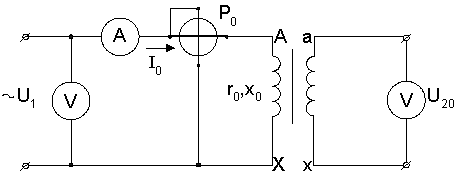
Пусковой момент электродвигателя
Пусковой момент асинхронного электродвигателя сопровождается переходом ротора из состояния покоя во вращение. Данный момент зависит от особенностей конструкции самого электродвигателя и ротора.
Пуск электродвигателя
- Во время пускового момента электродвигателя уравновешивается сила сопротивления на валу. Во время пуска происходит максимальный затрат электроэнергии, который идет не только на преодоление тормозного момента вала, но и на компенсацию потерь в асинхронном электромоторе, а также на сообщение всеми движущими звеньями кинетической энергии. Соответственно пусковой момент – это развитие повышенного вращающего момента.
- Асинхронный электродвигатель с фазным ротором развивает вращение, соответствующее скольжению sп= 1, что в свою очередь зависит от активного сопротивления резисторов, изначально введенных в цепь самого ротора.
- Причем пусковой момент трехфазного электродвигателя с наличием фазного ротора зависит от скольжения при активном сопротивлении непосредственно в сети ротора и схемы включения резисторов, замыкающих контактов для ускорения в цепь самого ротора.
- Расчет пускового момента производится с использованием специальных формул. Если начальный пусковой момент электродвигателя относительно мал, он может оказаться недостаточным для пуска производственных агрегатов и последующего ускорения, что в свою очередь может вызвать нагрев обмотки и понижению напряжения в питающей сети. Данные обстоятельства исключают использование таких электродвигателей с наличием фазного ротора с большой силой пускового тока для привода мощных производственных механизмов.
- При введении в цепь ротора регулируемых резисторов, которые относятся к пусковым, значительно снижается пусковой ток и одновременно увеличивается пусковой момент. Но дальнейшее увеличение сопротивления приводит к ослаблению начального пускового момента электродвигателя и точка максимального момента выйдет в повышенную область скольжения, что исключит разгон мотора до номинальной скорости.
Поддержание оптимальной скорости пускового момента электродвигателя
При постепенном уменьшении активного сопротивления пусковых резисторов можно поддерживать оптимальный вращающий момент электродвигателя в момент пуска. Допустимое изменение данных параметров должны рассчитать специалисты с соответствующим уровнем образования и опытом. Тогда все пиковые моменты пуска будут полностью исключены.
Просмотров: 2984
Дата: Воскресенье, 15 Декабрь 2013
Вращающий момент асинхронного двигателя. Вывод формулы. Номинальный, критический и пусковой моменты.
⇐ ПредыдущаяСтр 7 из 9Следующая ⇒Для каждого асинхронного двигателя может быть определен номинальный режим, т. е. режим длительной работы, при котором двигатель не перегревается сверх установленной температуры. Момент Мном, соответствующий номинальному режиму, называется. номинальным моментом. Соответствующее ему номинальное скольжение составляет для асинхронных двигателей средней мощности sH0M = 0,02…0,06, т.е. номинальная скорость nиом находится в пределах
nном=n0(1 — s0)= (0,94…0,98) п0
Отношение максимального момента к номинальному км = = Mmах/Mном называется перегрузочной способностью асинхронного двигателя. Обычно кт = 1,8.. .2,5.
При пуске в ход, т. е. при трогании с места и при разгоне, асинхронный двигатель находится в условиях, существенно отличающихся от условий нормальной работы. Момент, развиваемый двигателем, должен превышать момент сопротивления нагрузки, иначе двигатель не сможет разгоняться. Таким образом, с точки зрения пуска двигателя важную роль играет его пусковой момент.
Отношение пускового момента Мп развиваемого двигателем в неподвижном состоянии, т. е. при n = 0, к номинальному моменту kп= Мп/Мном называется кратностью пускового момента.
Максимальный момент Мтах называется критическим моментом асинхронной машины. Работа машины с моментом, превышающим номинальный, возможна лишь кратковременно, в противном случае срок службы машины сокращается из-за ее перегрева.
В результате взаимодействия вращающегося магнитного потока с токами, индуктированными им в проводниках роторной обмотки, возникают силы, действующие на эти проводники в тангенциальном направлении. Найдем значение момента, создаваемого этими силами на валу машины.
Электромагнитная мощность, передаваемая ротору вращающимся магнитным полем, ровна:

где Мэм — электромагнитный момент действующий на ротор.
В соответствии со схемой замещения одной фазы машины: 
Из этих выражений найдем: 
Учитывая действующий ток ротора, ЭДС, индуктивное сопротивление получим:

Введем постоянную  и пренебрегая моментом трения, представим выражение момента на валу в виде:
и пренебрегая моментом трения, представим выражение момента на валу в виде: 
Если магнитный поток Ф выражен в веберах, ток I2— в амперах, то вращающий момент получится в ньютон-метрах (Нм).




Вращающий момент машины зависит от изменяющихся при нагрузке ф, I2и  , но его можно представить в виде функции однойпеременной. В качестве такой переменной для асинхронного двигателя наиболее удобно выбрать скольжениеs.
, но его можно представить в виде функции однойпеременной. В качестве такой переменной для асинхронного двигателя наиболее удобно выбрать скольжениеs.
Согласно ранее изученным формулам:
Полагая, что частота сети неизменна введем
36. Способы регулирования частоты вращения ад с к.з. ротором






37.Пуск и регулирования частоты вращения АД с ф.р.
Регулирование изменением скольжения выполняют изменением сопротивления Rp регулировочного реостата в цепи ротора.
 Введение реостата в цепь ротора изменяет зависимость вращающего момента М от скольжения s, не влияя на величину наибольшего момента. Три характеристики M(s): естественная (безреостатная) характеристика 1 соответствует замкнутой накоротко обмотке ротора (сопротивление реостата = 0), реостатные (искусственные) характеристики 2 и 3 – введенным одной и двум ступеням реостата.
Введение реостата в цепь ротора изменяет зависимость вращающего момента М от скольжения s, не влияя на величину наибольшего момента. Три характеристики M(s): естественная (безреостатная) характеристика 1 соответствует замкнутой накоротко обмотке ротора (сопротивление реостата = 0), реостатные (искусственные) характеристики 2 и 3 – введенным одной и двум ступеням реостата.
Введение реостата в цепь ротора положительно влияет на пусковой ток, снижая его примерно в 2 раза по сравнению с короткозамкнутым АД.
Недостатки данного способа: 1) низкая экономичность из-за потерь в реостате Rp; 2) снижение жесткости механических характеристик; 3) частоту вращения можно регулировать только в сторону понижения.
Пуск асинхронного двигателя с фазным ротором.Пуск в ход асинхронных двигателей существенно отличается от условий нормальной работы. Момент двигателя при пуске должен превышать момент сопротивления нагрузки, роль играет пусковой момент. Второй важной пусковой характеристикой является пусковой ток. Кратность пускового тока для двигателей с короткозамкнутым ротором достигает 5-7, что может быть недопустимо для двигателя или для сети и может иметь значение плавность пуска. Пуск в ход двигателя с фазным ротором осуществляется через 3х фазный реостат, каждая фаза которого включена через щётки и кольца в одну из фаз ротора. В начале пуска реостат введён полностью, к концу пуска он выводится и все три фазы ротора замыкаются накоротко. Число ступеней реостата берётся больше двух и процесс переключений при пуске обычно автоматизируется. Введение активных сопротивлений в цепь фазного ротора увеличивает момент и делает пуск плавным и ограничивает пусковой ток. Этот способ пуска имеет ряд достоинств, но применим только для двигателей с фазным ротором.

39,40. Устройство, принцип действия двигателя постоянного тока. Способы возбуждения. ЭДС обмотки якоря и электромагнитный моментУстройство и принцип действия двигателя постоянного тока Двигатель постоянного тока состоит из неподвижной части -статора и вращающейся части — якоря, разделенных воздушным зазором. К внутренней поверхности статора крепятся главные в добавочные полюсы. Главные полюсы с обмотками возбуждения служат для создания в машине основного магнитного потока Ф, а добавочные — для уменьшение искрения.
Якорь состоит из вала, сердечника, обмотки и коллектора. Коллектор содержит изолированные друг от друга медные пластины, которые соединяются с секциями обмотки якоря. На коллектор накладываются неподвижные щётки; соединяющие обмотку якоря с внешней электрической цепью. В результата взаимодействия тока якоря Iя И магнитного потока Ф создается вращающий момент, М=СмФIя , где См- постоянная момента, зависящая от конструктивных данных машины. Вращающий момент М, двигателя уравновешивается моментом сопротивления Мс рабочей машины. При вращении якоря с частотой n его обмотка пересекает магнитный поток Ф и в ней, согласно закону электромагнитной индукции, наводится противо-ЭДС E =СеФп , где Се _ конструктивная постоянная.
Напряжение на эажимаx якоря U равно сумме ЭДС и падения напряжения на сопротивлении якорной цепи U=E +RяIя=CеФn, откуда ток якоря Iя=(U-CеФn)/Rя, а частота вращения n=(U- RяIя)/ CеФ/
В зависимости от способа питания обмотки возбуждения генераторы постоянного тока бывают:

Рис. 50. Возбуждение генератора: а — независимое, б — параллельное, в — последовательное, г — смешанное.
При независимом возбуждении ОВ питается от постороннего источника. Применяется в случаях, когда необходимо в широких пределах регулировать ток возбуждения Iв и напряжение U на зажимах машины. Ток якоря равен току нагрузки Iя = Iн (рис. 50, а)
Генераторы с самовозбуждением имеют ОВ, питаемые от самого генератора.
При включении ОВ параллельно с обмоткой якоря имеем генератор с параллельным возбуждением (рис. 50, б), у которого Iя = Iн + Iв. У мощных машин нормального исполнения Iв обычно составляет 1-3%, а у малых машин — до нескольких десятков % от тока якоря. У генератора с последовательным возбуждением (рис. 50, в) ОВП включён последовательно с якорем, т.е.
Iя = Iн = Iв.
Генераторы со смешанным возбуждением имеют две обмотки возбуждения, ОВ включёна параллельно якорю, а другая ОВП — последователь но (рис. 50, г). Основной обычно является ОВ. ОВП подмагничивает машину при увеличении тока нагрузки, чем компенсируется падение напряжения U в обмотке якоря и размагничивающее влияние реакции якоря.


7.4 Электромагнитный момент и механическая характеристика асинхронного двигателя
Электромагнитный момент создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М пропорционален электромагнитной мощности и определяется по формуле
| (7.8) |
 ,
а
,
а  ,
,– угловая синхронная скорость вращения.
Зависимость момента от скольжения – механическая характеристика асинхронной машины. Механическая характеристика имеет максимум.
На рисунке 7.2 показана механическая характеристика асинхронной машины, где указаны зоны, соответствующие различным режимам работы:
Для
анализа работы асинхронного двигателя
удобнее воспользоваться механической
характеристикой  ,
представленнойна
рисунке 7.3.
,
представленнойна
рисунке 7.3.
При
включении двигателя в электрическую
сеть, магнитное поле статора, не обладая
инерцией, сразу же начинает вращение
с синхронной частотой n1 , в то же время ротор двигателя под
влиянием сил инерции в начальный момент
пуска остается неподвижным ( )
и скольжение s = 1.
)
и скольжение s = 1.
Выражение пускового момента асинхронного двигателя:
| (7.9) |
 ,
Н·м,
,
Н·м,Под действием этого момента начинается вращение ротора двигателя, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой M = f(s). При критическом скольжении sкp момент достигает максимального значения Мmах. С дальнейшим нарастанием частоты вращения момент М начинает убывать, пока не достигнет установившегося значения.

Рисунок 7.3 – Зависимость электромагнитного момента АД от скольжения
Из
анализа механической характеристики
следует, что устойчивая
работа асинхронного
двигателя возможна при скольжениях
меньше критического ( ),
то есть на участке ОА механической
характеристики. Работа асинхронного
двигателя становитсянеустойчивой при скольжениях
),
то есть на участке ОА механической
характеристики. Работа асинхронного
двигателя становитсянеустойчивой при скольжениях  .
Так, если электромагнитный момент
двигателяМ=Mmax,
a скольжение s=sкр,
то даже незначительное увеличение
нагрузочного момента, вызвав увеличение
скольжения s приведет к уменьшению момента М. За этим
последует дальнейшее увеличение
скольжения до s
=1, то есть
пока ротор не остановится. При достижении
электромагнитным моментом максимального
значения наступает предел
устойчивой работы асинхронного
двигателя.
.
Так, если электромагнитный момент
двигателяМ=Mmax,
a скольжение s=sкр,
то даже незначительное увеличение
нагрузочного момента, вызвав увеличение
скольжения s приведет к уменьшению момента М. За этим
последует дальнейшее увеличение
скольжения до s
=1, то есть
пока ротор не остановится. При достижении
электромагнитным моментом максимального
значения наступает предел
устойчивой работы асинхронного
двигателя.
Для
надёжной работы асинхронного двигателя
необходимо, чтобы он обладал перегрузочной
способностью. Перегрузочная способность
определяется отношением максимального
момента  к номинальному моменту
к номинальному моменту и составляет для двигателей общего
назначения
и составляет для двигателей общего
назначения
| (7.10) |

Работа двигателя при скольжении s < sкр, т. е. на рабочем участке механической характеристики, является наиболее экономичной, так как она соответствует малым значениям скольжения, а, следовательно, меньшим значениям электрических потерь в обмотке ротора.
7.5 Пуск асинхронных двигателей
Пуск асинхронного двигателя сопровождается переходным процессом, обусловленным переходом ротора, и механически связанных с ним частей исполнительного механизма, из состояния покоя в состояние равномерного вращения, когда вращающий момент двигателя уравновешивается суммой противодействующих моментов, действующих на ротор двигателя.
Пусковые
свойства двигателя определяются
значениями пускового тока  пускового моментаМп.
пускового моментаМп.
Двигатель, обладающий хорошими пусковыми свойствами, развивает значительный пусковой момент при сравнительно небольшом пусковом токе. Однако получение такого сочетания пусковых параметров в асинхронном двигателе сопряжено с определенными трудностями, а иногда оказывается невозможным. Пусковой ток может превышать номинальный в 5-7 раз, что неблагоприятно влияет на работу как самого двигателя, так и других потребителей за счет снижения напряжения сети, что уменьшает пусковой момент и увеличивает время пуска. Для улучшения пусковых свойств необходимо предпринять меры для увеличения пускового момента с одновременным ограничением пускового тока.
Различают несколько способов пуска асинхронных двигателей:
1. Прямой пуск – прямым включением в сеть на полное номинальное напряжение двигателя – применяется для большинства двигателей малой и средней мощности с короткозамкнутым ротором.
Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5-7 раз превышающий номинальный ток двигателя. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать падение напряжения.
2. Пуск
при пониженном напряжении – применяется
для двигателей с короткозамкнутым
ротором при отсутствии нагрузки на его
валу. Для понижения напряжения при
пуске обмотки статора переключают из
схемы соединения «треугольник» на
схему соединения «звезда», что приводит
с уменьшению напряжения на обмотке в  раз. При этом пусковой ток и вращающий
момент уменьшаются в три раза.
раз. При этом пусковой ток и вращающий
момент уменьшаются в три раза.
Универсальным является способ пуска понижением подводимого к двигателю напряжения посредством дросселей, а также пуск двигателя через автотрансформатор. В последнем случае пусковой ток двигателя, измеренный на выходе автотрансформатора, уменьшается на коэффициент трансформации автотрансформатора.
3. Пуск с помощью пускового реостата, включенного в цепь ротора, применяется только для двигателей с фазным ротором. Трехфазный пусковой реостат, включенный по схеме «звезда» включают последовательно с обмоткой ротора через щетки и кольца, в результате сопротивление цепи ротора увеличивается, а пусковой ток уменьшается. Изменение сопротивление пускового реостата обеспечивает разгон двигателя при максимальных моментах, что важно при пуске двигателя под нагрузкой.
Недостатками пусковых свойств двигателей с фазным ротором являются сложность, продолжительность и неэкономичность пусковой операции.
Кроме пусковых значений тока и момента пусковые свойства двигателей оцениваются еще и такими показателями: продолжительность и плавность пуска; сложность пусковой операции и экономичность (стоимость и надежность пусковой аппаратуры).
Что понимают под пусковым моментом асинхронного двигателя?
Пусковой момент на валу асинхронника – вращающий момент, который развивает на валу электрический асинхронный двигателя при следующих условиях: скорость вращения равна нулю (ротор неподвижен), ток имеет установившееся значение, к обмоткам электродвигателя подведено номинальное по частоте и напряжению питание, соединение обмоток соответствует номинальному режиму работы электродвигателя.
Под номинальным режимом понимают процесс функционирования электродвигателя, для которого он был разработан.
Пусковой момент часто называют моментом трогания, еще в литературе встречается термин начальный пусковой момент электродвигателя. Для вычисления пускового момента используют формулу: Мпуск = Мн*?пуск.
Где: Мпуск – пусковой момент
Мн – номинальный момент на валу электродвигателя.
?пуск – кратность пускового момента заданная в паспорте двигателя. Значение данного параметра варьируется в пределах от 1,5 до 6 для различных типов двигателей и нагрузок.
Еще статьи по теме:
Пример расчета пускового момента по паспортным данным двигателя.
Формулы для определения пускового момента электродвигателя.
При выборе электродвигателя для оборудования важно следить что бы пусковой момент был больше чем статический момент нагрузки подключенной к валу электродвигателя. В случае если данное условие не выполняется асинхронный двигатель либо вообще не сможет разогнать нагрузку, либо разгон будет очень длительным.
Что еще почитать по теме:
Обсуждение термина электромагнитный вращающий момент электродвигателя.
Нужно ли вычислять вращающий момент при выборе двигателя для ЧРП?
| < Предыдущая | Следующая > |
|---|