


Шаговые двигатели
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Выбор контроллера для управления шаговым двигателем описан в статье Контроллеры ШД. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит.
В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей:
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами
· гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.

Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.

Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — I
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
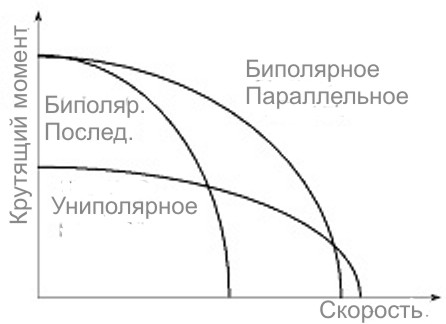
При выборе шагового двигателя одной из важнейших характеристик является его скоростные качества, то есть зависимость момента на валу от скорости вращения. Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение R/L тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента. Объясняется это тем, что эквивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление, возникающая в цепи ЭДС самоиндукции препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи. Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
Интернет магазин чпу станков хобби класса и комплектации
Шаговый двигатель — Энциклопедия ТриДэшника
Описание


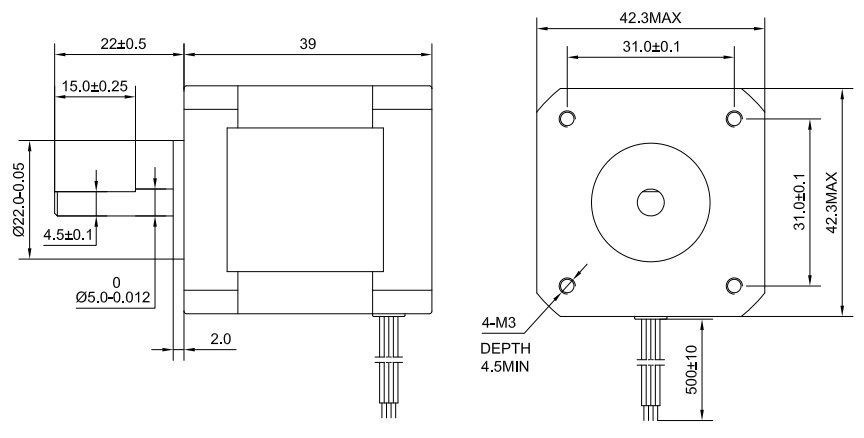
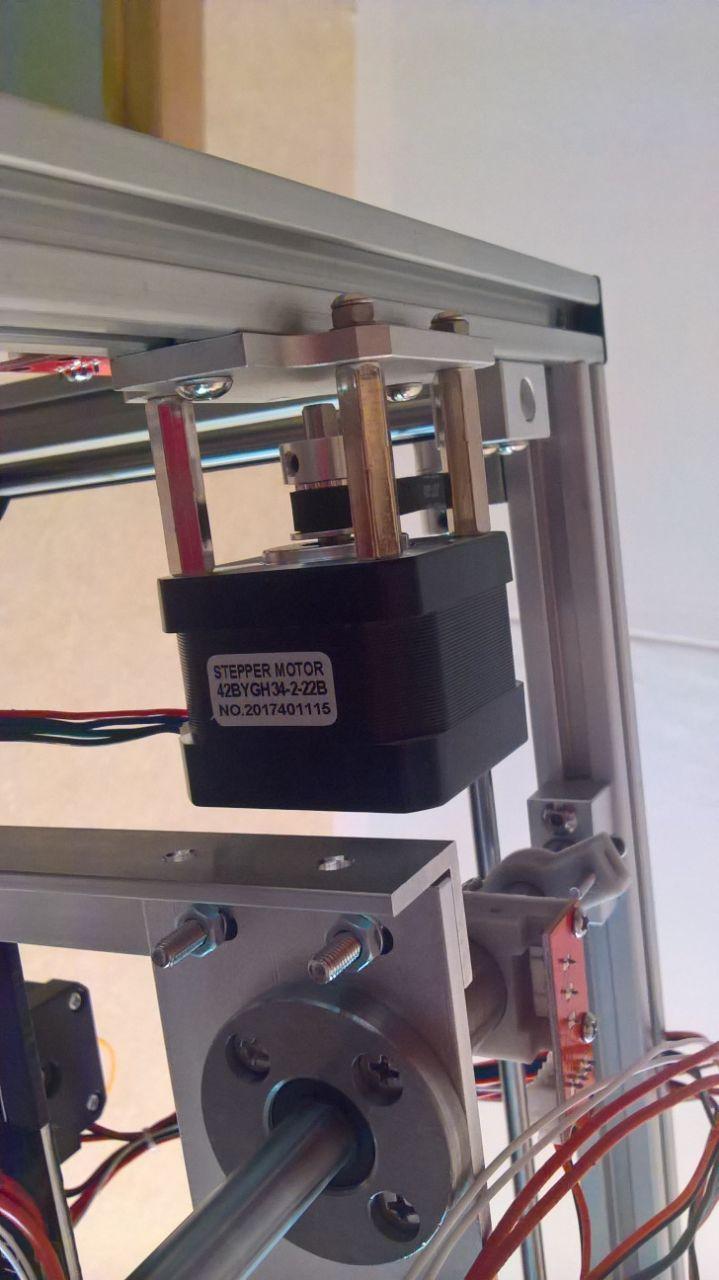
В 3D принтерах используются шаговые двигатели типоразмера NEMA 17, то есть посадочные отверстия унифицированы и габаритно отличаются только по длине. Шаговые двигатели вращаются дискретно. Обычный двигатель делает 200 шагов на оборот. Для более плавного вращения драйвер шагового двигателя делит полный шаг на микрошаги. Обычно используется драйвер A4988 с дроблением шага на 16 микрошагов, а это уже 3200 микрошагов на один оборот. Подобные двигатели используются в обычных чернильных принтерах, только меньшей мощности. Нам нужны биполярные двигатели, имеющие четыре провода.
У обесточенного двигателя момент удержания не равен нулю вследствие действия постоянных магнитов ротора. Этот момент обычно составляет около 10% максимального момента, обеспечиваемого двигателем.
Микрошаг
| Если запитать одновременно две обмотки двигателя, то момент будет равен сумме моментов, обеспечиваемых обмотками по отдельности. При этом, если токи в обмотках одинаковы, то точка максимума момента будет смещена на половину шага. На половину шага сместится и точка равновесия ротора. Этот факт положен в основу реализации полушагового режима. Ротор вращается в след за магнитным полем статора, стремясь занять положение равновесия. Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага способен обеспечить более точное позиционирование. В микрошаговом режиме можно осуществлять только разгон и торможение, а основное время работать в полношаговом режиме. К тому же, для достижения высоких скоростей в микрошаговом режиме требуется очень высокая частота повторения микрошагов, которую не всегда может обеспечить управляющий микроконтроллер. |
Возможные артефакты от шагового двигателя
Идеальный шаговый двигатель при питании фаз синусоидальным и косинусоидальным током должен вращаться с постоянной скоростью. У реального двигателя в таком режиме будут наблюдаться некоторые колебания скорости. Связано это с нестабильностью воздушного зазора между полюсами ротора и статора, наличием магнитного гистерезиса, что приводит к погрешностям величины и направления магнитного поля и т.д. Поэтому положения равновесия и момент имеют некоторые отклонения. Эти отклонения зависят от погрешности формы зубцов ротора и статора и от примененного материала магнитопроводов.
Если измерить положения равновесия ротора при вращении двигателя по и против часовой стрелки, то получатся несколько разные результаты. Этот гистерезис связан в первую очередь с магнитным гистерезисом материала сердечника, хотя свой вклад вносит и трение. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. Погрешность, создаваемая гистерезисом может быть равна нескольким микрошагам. Поэтому в высокоточных приложениях при движении в одном из направлений нужно проходить за желаемую позицию, а затем возвращаться назад, чтобы подход к нужной позиции всегда осуществлялся в одном направлении.
Размеры
Самые распространённые модели
| Модель | Угол шага, град | Длина, мм | Ток, А | Сопротивление обмотки, Ом | Момент удержания, Н*m | Вес, г |
|---|---|---|---|---|---|---|
| 17HS4401 | 1,8 | 40 | 1,7 | 1,5 | 0,4 | 280 |
| 17HS4402 | 1,8 | 40 | 1,3 | 2,5 | 0,4 | 280 |
| 17HS8401 | 1,8 | 48 | 1,8 | 1,8 | 0,52 | 400 |
| 42BYGHW609 | 1,8 | 40 | 1,7 | 1,5 | 0,4 | 240 |
| 42BYGHW811 | 1,8 | 48 | 2,5 | 1,25 | 0.48 | 340 |
| 42BYGHM809 | 0,9 | 48 | 1,68 | 1,6 | 0.42 | 340 |
| GZGW09 | 1,8 | 34 | 0,84 | 5,75 | 0,48 | 220 |
| MKS 4248-450 | 1,8 | 48 | 1 | 3 | 0,45 | 380 |
| MKS 4240-400 | 1,8 | 40 | 1 | 3 | 0,40 | 295 |
| MKS 4234-290 | 1,8 | 34 | 1 | 3,1 | 0,29 | 240 |
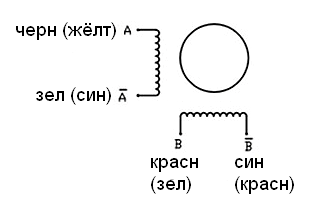
Подключение
Провода желательно свить в косички от наводок.
Обмотки определяются очень просто — при закорачивании (соединении выводов обмотки) ротор двигателя прокручивается с большим усилием. Также это можно определить мультиметром.
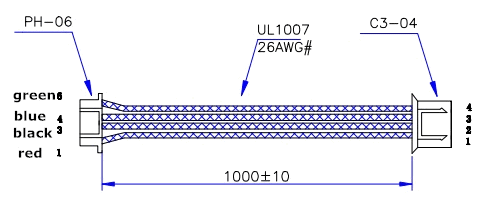
Шлейф для подключения двигателей MKS
Уменьшение вибраций
Возможно использование амортизаторов (демпферов) на двигатели для уменьшения вибраций. Выглядят они обычно так
Так же можно встретить двигатели с уже установленным амортизатором. В некоторых случаях это не оправдано.
Источники информации и полезные ссылки
- 3D printing guides — How steppers work and how to adjust their drivers
- 17HSxxxx Datasheet
- Базовые знания о шаговых двигателях
- StepperSim
- Видео «Переделка унипрлярного двигателя в биполярный»
- Диаграммы, диаграммы…
Характеристики шаговый двигателей
smur
Загрузка
10.08.2017
4893
печатает на Flyingbear P902 Вопросы и ответы Добрый день.На принтере установлено 2 вида шаговых двигателей.
42BYGh44-2-22b
и отдельно на ось Z 42BYGh44-2-12b

 В интернете я полных характеристик не нашел. кроме того. что размер 42 и буква b что он биполярный.
В интернете я полных характеристик не нашел. кроме того. что размер 42 и буква b что он биполярный.Спросил у Линды, чтобы прислала тех характеристики этих шаговиков.
Ответ получил:
Linda Lin: 1.3A 0.30Nm
Больше мне она ни на что не ответила. Если у вас есть более подробная информация, дайте, пожалуйста, ссылку на характеристики этих двигателей.
Принтер куплен 1 августа, еще действует защита покупателя.
Ответы на вопросыПопулярные вопросы
bar2104Загрузка
02.01.2020
655
Начал собирать материал по скорости работы различных программ 3D моделирования. Текущие наработки есть в этой таблице, если кто-то может помочь…
Читать дальше puhЗагрузка
02.01.2020
353
По случаю всех выживших поздравляю с новым 2020 годом.Суть вопроса.
Как на приснопамятной платке дельтапринтера зап…
Читать дальше TortikЗагрузка
24.12.2018
11667
С того момента как я собрал принтер Ultimaker уважаемого Plastmaski, не могу избавиться от одной проблемы. Уже почти 2 кг пластика перевел на тесты. М…
Читать дальшеРадиоКот :: Шаговый двигатель — что это такое и как им управлять.
РадиоКот >Лаборатория >Цифровые устройства >Шаговый двигатель — что это такое и как им управлять.
Сегодня шаговые двигатели (далее ШД) активно используются в различных приводах и позиционирующих системах, что объясняется их невысокой ценой и достаточной надёжностью, также применение шаговых двигателей позволяет обойтись без дорогого контура скорости и положения, при этом не накапливается ошибка положения. Первые модели ШД имели малое число шагов и большие габариты, что сильно ограничивало их использование.
Существует 3 типа ШД:
Реактивные:
Поперечное сечение реактивных ШД.
а) трехфазный б) четырёхфазный.
На постоянных магнитах:
Поперечное сечение четырехфазного ШД на постоянных магнитах.
Гибридные
Конструкция гибридного ШД:
1 — магнитопровод статора, 2 — обмотки, 3 — магнитопровод ротора,
4 — обмотка статора, 5 — постоянный магнит.
Структура ротора гибридного ШД:
1 — шихтовая сталь, 2- постоянный магнит.
Из доступных радиолюбителю являются движки от принтеров которые являются гибридными ШД, других я просто не встречал, поэтому в дальнейшем речь пойдёт о них.
Ну вот из чего состоит ШД и, что он себя представляет разобрались самое время вникать как этим добром управлять. Различают одно и двухфазное возбужде-ние. В дальнейшем я буду рассматривать четырехфазный ШД т.к. именно с ним я работал в трехфазном всё аналогично.
Одним из недостатков ШД является колебательность ротора при установке в новое положение это обусловлено прежде всего инерцией ротора. Согласно теории при двухфазном возбуждении колебания затухают быстрее, чем при однофазном, однако при этом возрастают броски коммутирующего тока. На практике же я не об-наружил существенной разницы, обмотки при двухфазном управлении грели лучше батареи, колебания тока затухали дольше, чем при однофазном. В механике может оно быстрее, однако максимальная шаговая скорость не увеличилась.
Кроме одно- и двухфазного управления существует полушаговый режим. В этом режиме за цикл ротор делает половинный шаг, данный режим осуществляется особым управление обмотками.
Как оно там происходит видно на рисунке ниже:
Сравнение однофазного, двухфазного и полушагового управления:
а) однофазное; б) двухфазное; в) полушаговое.
Также у гибридных двигателей есть режим микрошага для этого на обмотки подаётся синусоидальное напряжение, при этом осуществляется почти плавное перемещение ротора, однако сказывается фиксирующий эффект обусловленный зубцами ротора и статора. При использовании датчиков положения ШД работает аналогично вентильному двигателю.
Теории думаю хватит, будем считать что к чему разобрались. Руки чешутся всё это попробовать. Начнём со схемы, я правда обычно начинаю с печатки, а схема это лишь следствие.
Несколько слов по схеме, в EAGLE почему-то не было ATMEGA8 в DIP корпусе, взял TQFP поэтому номера выводов для DIP корпуса отличны. Транзисторы Т1-Т4 составные BD677A, BD679A, BD681 или КТ829Б, я использовал последние, позже купил BD681, но проверить ещё не успел. При питании ШД от 5В можно применить BD675A, возможны и другие аналоги аналогичной мощности и коэффициентом передачи тока более 750, что обусловлено большими бросками тока в фазах при коммутации. Изначально я поставил КТ814 в результате транзюки нагрелись так что отпаялись, текстолит потемнел, МК естественно отправился в мир иной.
Диоды D1-D4 любые выдерживающие ток от 1А и напряжение от 50В. Светодиоды в принципе любые, сопротивление R3 выбирается в зависимости от тока светодиодов. L1-L4 это обмотки ШД, номера обмоток обозначены условно главное чтоб по порядку. Мой ШД по документации работает при напряжении до 24В, я гонял на 12В и 22В, обмотки и транзисторы при этом греются сильно, так что аккуратнее. Питание на обмотки подаётся через переключатель S4, он должен быть рассчитан на ток порядка 3-4А. Переключатель S3 включает защитные диоды, это сделано для того что-бы можно было осциллографом проследить коммутационные процессы с ними и без них. Ставить их вообще не обязательно работать будет. Основная функция диодов — защита транзисторов он бросков напряжения при коммутации.
Печатную плату можно стырить в конце статьи.
Свою плату я делал давно и рисунок потерял. Этот вариант рисовал для ленивых, советую проверить перед изготовлением я мог и ошибиться. Разъём под программирование разводить не стал т.к. у различных программаторов по разному, про-сто вывел соответствующие пины кому надо разведёт, места много.
Настало время браться за прошивку (которая так же доступна в виде файла в конце статьи). Пишу я на Си в компиляторе ICC for AVR, если используете другой компилятор то часть кода в части обработчика пре-рывания и включения файлов регистров и п.т.
Немного расскажу о программе. Таймер счётчик работает в режиме СТС(4) сброс при совпадении, предделитель = 1, соответственно значение шаговой частоты F=fclk/OCR1A, в программе за частоту отвечает глобальная переменная time тина int. Выбор скорости осуществляется нажатие кнопки SPEED, для кварца 4000 кГц в данной версии прошивки значения шаговой частоты будет 0,1; 0,2; 1 и 5 кГц. При переключении скорости соответственно загораются светодиоды LED1…LED4. Пере-ключатель switch в обработчике прерывания при инкременте переменной driver, обеспечивает полушаговое управление, однако если выделить только нечётные зна-чения получится однофазный режим, чётные — двухфазный, для того что бы обеспе-чивалось соответствующее изменение driver введена дополнительно переменная step, когда выбран режим 1или 2 (переменная tip) переменная step =1 и driver инкремен-тируется на 2, при step =0 drive rинкрементируется на 0. При установке режима 1 или 2, переменной присваивается значение этого режима, таким образом осуществ-ляется выделение нечётных для 1-го и чётных для 2-го режима. Для индикации ре-жима предназначены светодиоды LED5 и LED6, при 0-м выключенном режиме они не горят при этом напряжение с обмоток снимается во избежании из перегрева. В целом я считаю код довольно понятным и не требует особых знаний. При желании его можно адаптировать под себя.
Ну и в заключениии — фото на память:
Файлы:
Прошивка (с исходником) — 01.rar
Печатная плата — 02.rar
Все вопросы — в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
EM-34 шаговый двигатель
ndesignЗагрузка
06.06.2016
5668
Вопросы и ответы Здравствуйте! Прошу помощи в переделке EM-34 в биполярный двигатель. Я смотрел схему по переделке, но не рискнул перерезать провода… не уверен в успехе проведенной мною работы.Может подскажите, возможно помогите, в переделке!!! Может найдется наставник, который сможет провести по столь сложному пути, буду безгранично благодарен!! прикреплю фото двух моторов
ем-34
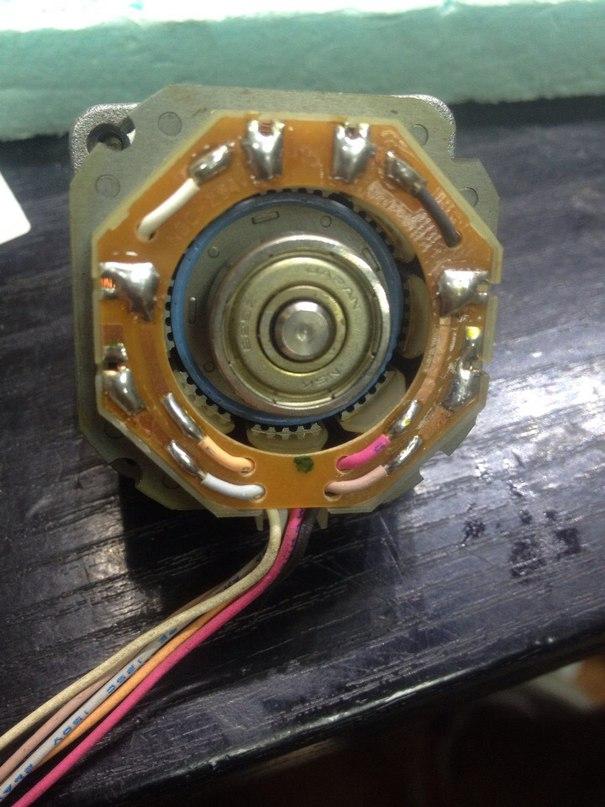
 ем-неизвестный
ем-неизвестный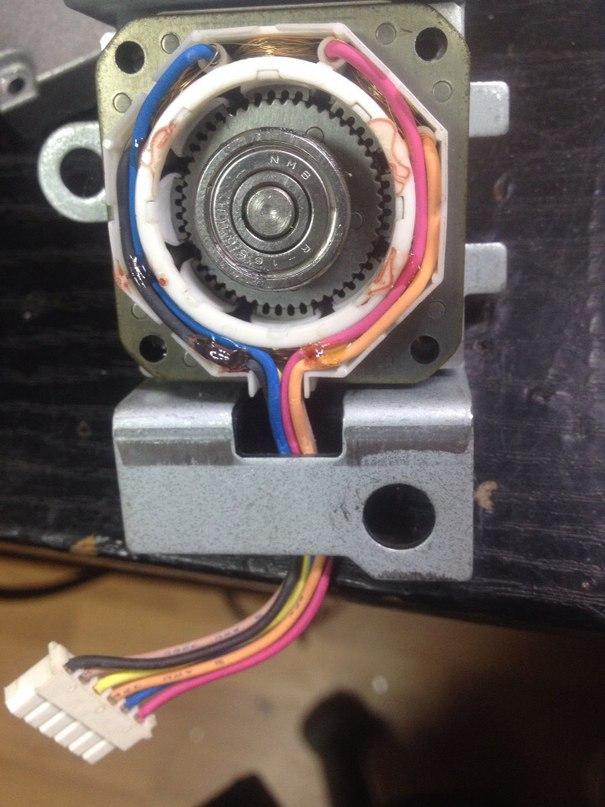
 Ответы на вопросы
Ответы на вопросыПопулярные вопросы
skif_kem_netЗагрузка
16.01.2020
597
Доброго времени суток!Недавно обзавелся 3Д принтером и четырьмя бобинами филамента.
Магнитную наклейку со стола отк…
Читать дальше MA8Загрузка
23.01.2020
819
Встала задача открутить прикипевший аэратор в изливе смесителя. Планирую напечатать модель ключа, что-то типа того что на фото, но модель сделаю сам с…
Читать дальше Strela Ro-SaЗагрузка
24.01.2017
6865
Вопрос возник из за отсутствия управления в G-code Simplify3D возможности конкретно влиять на скорость печати Infill.Есть какие либо…
Читать дальше