


Что такое магнитная левитация и как это возможно
Что такое магнитная левитация и как это возможно
Магнитная левитация — технология, метод подъёма объекта с помощью одного только магнитного поля. Магнитное давление используется для компенсации ускорения свободного падения или любых других ускорений.
Слово «левитация» происходит от английского «levitate» — парить, подниматься в воздух. То есть левитация — это преодоление объектом гравитации, когда он парит и не касается опоры, не отталкиваясь при этом от воздуха, не используя реактивную тягу. С точки зрения физики, левитация — это устойчивое положение объекта в гравитационном поле, когда сила тяжести скомпенсирована и имеет место возвращающая сила, обеспечивающая объекту устойчивость в пространстве.
В частности магнитная левитация — это технология подъёма объекта с помощью магнитного поля, когда для компенсации ускорения свободного падения или любых других ускорений используется магнитное действие на объект.
Магнитное удержание объекта в состоянии устойчивого равновесия можно реализовать несколькими способами. Каждый из способов имеет свои особенности, и к каждому можно предъявить претензии, вроде «это не настоящая левитация!», и так оно на самом деле и будет. Настоящая левитация в чистом виде недостижима.
Так, теорема Ирншоу доказывает, что, используя только ферромагнетики, невозможно устойчиво удерживать объект в гравитационном поле. Но несмотря на это, с помощью сервомеханизмов, диамагнетиков, сверхпроводников и систем с вихревыми токами возможно достичь подобие левитации, когда какой-нибудь механизм помогает объекту сохранять равновесие, когда тот поднят над опорой магнитной силой. Однако обо всем по порядку.
Электромагнитная левитация с системой слежения
Применив схему на базе электромагнита и фотореле можно заставить левитировать небольшие металлические предметы. Предмет будет парить в воздухе на некотором расстоянии от неподвижно закрепленного на стойке электромагнита. Электромагнит получает питание, пока фотоэлемент, закрепленный в стойке, не затенен парящим предметом, пока на него попадает достаточно света от неподвижно закрепленного контрольного источника, это значит, что объект нужно притянуть.
Предмет будет парить в воздухе на некотором расстоянии от неподвижно закрепленного на стойке электромагнита. Электромагнит получает питание, пока фотоэлемент, закрепленный в стойке, не затенен парящим предметом, пока на него попадает достаточно света от неподвижно закрепленного контрольного источника, это значит, что объект нужно притянуть.
Когда объект достаточно приподнят, электромагнит отключается, поскольку в этом момент тень от перемещенного в пространстве объекта падает на фотоэлемент, перекрывая свет источника. Объект начинает падать, но упасть не успевает, так как снова включился электромагнит. Так, отрегулировав чувствительность фотореле, можно добиться эффекта, при котором объект будет как-бы висеть на одном месте в воздухе.
На самом деле объект непрерывно то падает, то вновь немного приподнимается электромагнитном. Получается иллюзия левитации. На этом принципе основана работа «левитирующих глобусов» — довольно необычных сувениров, где к глобусу прикреплена магнитная пластина, с которой и взаимодействует электромагнит, скрытый в подставке.
Диамагнитная левитация
Графитовый грифель от простого карандаша является диамагнетиком, то есть веществом, которое намагничивается против внешнего магнитного поля. В определенных условиях происходит полное вытеснение магнитного поля из материала диамагнетика, например графитовый грифель обладает высокой магнитной восприимчивостью, и начинает парить над неодимовыми магнитами даже при комнатной температуре.
Для устойчивости эффекта магниты следует собрать в шахматном порядке (полюса магнитов), тогда графитовый стержень не выскользнет из «магнитной ловушки» и будет левитировать.
Редкоземельный магнит с индукцией всего 1 Тл может висеть между пластинами висмута, а в магнитном поле с индукцией 11 Тл можно между пальцами стабилизировать «левитацию» маленького неодимового магнита, поскольку руки человека являются диамагнетиком, как и вода.
Известен достаточно широко распространенный опыт с левитирующей лягушкой. Животное аккуратно помещают над магнитом, который создает магнитную индукцию больше 16 Тл и лягушка, демонстрируя диамагнитные свойства, фактически зависает в воздухе на небольшом расстоянии от магнита.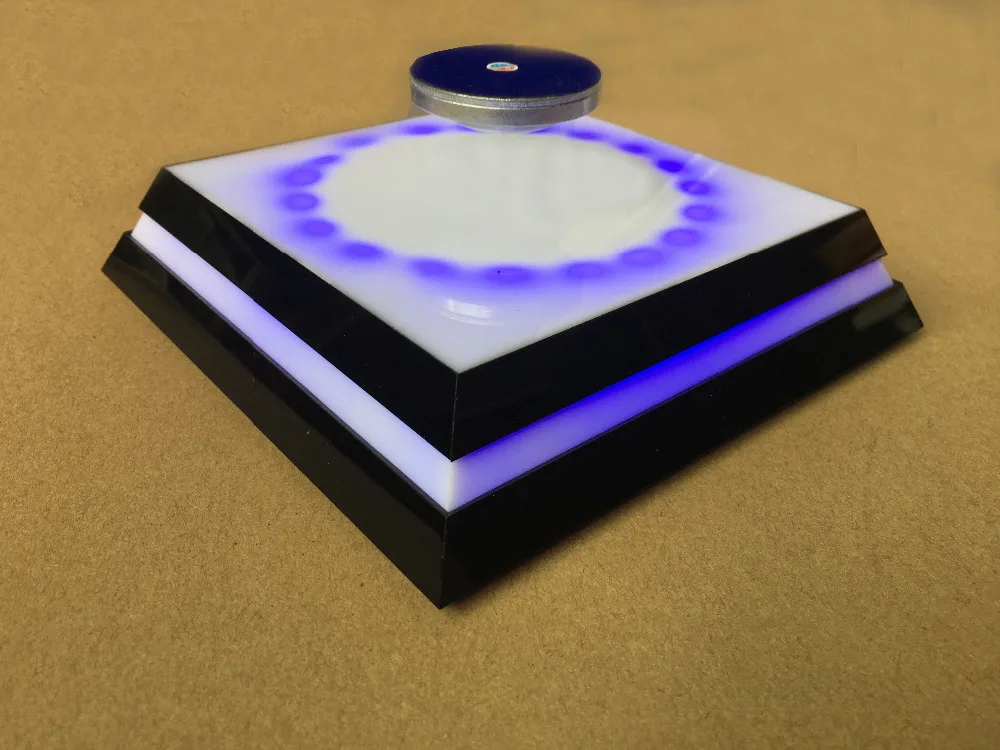
Левитация магнита над сверхпроводником (эффект Мейснера)
Пластина из оксида иттрия-бария-меди охлаждается до температуры жидкого азота. В этих условиях пластина становится сверхпроводником. Если теперь положить неодимовый магнит на подставку над пластиной, а затем подставку из под магнита вытащить, то магнит зависнет в воздухе — будет левитировать.
Даже небольшой магнитной индукции порядка 1 мТл достаточно чтобы магнит, будучи положен на пластину, приподнялся над охлажденным высокотемпературным сверхпроводником на несколько миллиметров. Чем выше индукция магнита — тем выше он поднимется.
Дело здесь в том, что одно из свойств сверхпроводника — выталкивание магнитного поля из сверхпроводящей фазы, и магнит, отталкиваясь от этого магнитного поля противоположного направления как-бы всплывает и продолжает парить над охлажденным сверхпроводником до тех пор, пока он не выйдет из сверхпроводящего состояния.
Левитация в условиях вихревых токов
Вихревые токи (токи Фуко), наводимые переменными магнитными полями в массивных проводниках также способны удерживать предметы в левитирующем состоянии. Например катушка с переменным током может левитировать над замкнутым кольцом из алюминия, а алюминиевый диск будет парить над катушкой с переменным током.
Объяснение здесь такое: по закону Ленца, индуцируемый в диске или в кольце ток будет создавать такое магнитное поле, что его направление станет препятствовать причине его вызывающей, то есть в каждый период колебаний переменного тока в индукторе, в массивном проводнике будет индуцироваться магнитное поле противоположного направления. Так, массивный проводник или катушка подходящий формы смогут левитировать все время пока включен переменный ток.
Аналогичный механизм удержания проявляется, когда неодимовый магнит роняют внутри медной трубы — магнитное поле индуцированных вихревых токов направлено противоположно магнитному полю магнита.
Ранее ЭлектроВести писали, что японская компания Lexus показала свой первый функционирующий прототип ховерборда – летающей доски для скейтбордистов.
По материалам: electrik.info.
Магнитная левитация. Виды и работа. Применение и особенности
Магнитная левитация – это технология, позволяющая поднимать объекты в воздух с помощью магнитного поля. Само слово «левитация» происходит от английского «levitate», которое можно перевести как «парить» или «подниматься в воздух». Фактически, данное физическое явление позволяет преодолеть гравитацию без применения реактивной тяги или аэродинамики, как это осуществляется самолетами, вертолетами и дронами.
Почему происходит магнитная левитацияС физической точки зрения левитация является устойчивым положением объекта в гравитационном поле. Фактически, сила тяжести компенсируется с силами воздействующими на предмет, которые его поднимают. В определенной точке данные силы уравниваются, благодаря чему объекты зависают. То понятие, которое укладывается в слово «левитация» в чистом виде недостижимо, что давно является доказанным фактом. На деле парение объекта достигается только путем воздействия на него магнитного поля. При этом сам предмет, который зависает в воздухе, не обладает свойствами парить без внешнего воздействия. Он не сможет делать это абсолютно в любых условиях и на разной высоте.
В определенной точке данные силы уравниваются, благодаря чему объекты зависают. То понятие, которое укладывается в слово «левитация» в чистом виде недостижимо, что давно является доказанным фактом. На деле парение объекта достигается только путем воздействия на него магнитного поля. При этом сам предмет, который зависает в воздухе, не обладает свойствами парить без внешнего воздействия. Он не сможет делать это абсолютно в любых условиях и на разной высоте.
Условия, которые необходимо обеспечить, чтобы осуществить магнитную левитацию, могут отличаться. Существует несколько технологий, которые позволяют добиться эффекта парения:
- Электромагнитная.
- Диамагнитная.
- Сверхпроводниковая.
- Вихретоковая.
Данная технология подъема объекта над поверхностью подразумевает применение . Он располагается в нижней части устройства. На него укладываются легкие металлические предметы. Над электромагнитом с помощью стойки закрепляется фотоэлемент. Задача последнего заключается в подачи и прерывания питания на электрический магнит. Если фотоэлемент улавливает тень, то он включает или отключает питание, что зависит от места его расположения. Это происходит с периодичностью в доли секунды.
Задача последнего заключается в подачи и прерывания питания на электрический магнит. Если фотоэлемент улавливает тень, то он включает или отключает питание, что зависит от места его расположения. Это происходит с периодичностью в доли секунды.
Принцип работы данной технологии подразумевает создание кратковременного воздействия электромагнитного поля на металлический объект. Катушка его подталкивает, после чего отключается, и предмет начинает падать вниз. Сразу же катушка снова создает электромагнитное поле поднимающее объект, и он взлетает. Цикличное воздействие необходимо для того, чтобы обеспечить возможность контроля местоположения парящего предмета. Дело в том, что постоянное электромагнитное поле смещает объект, пока он не выйдет из зоны воздействия и не упадет под влиянием силы притяжения. Если же циклично включать и отключать поле, то предмет будет просто подскакивать, фактически не удаляясь от точки нахождения.
При взгляде со стороны благодаря высокой частоте подачи и отключения электромагнитного воздействия, парящий предмет выглядит практически неподвижным. Это создает впечатление его реальной левитации. Данная технология является весьма популярной при производстве сувениров. Примером ее реализации является летающий глобус. Недостаток данного способа заключается в определенной сложности запуска устройства. Необходимо закрыть фотодатчик, приподнять предмет для левитации, после чего открыть систему фотодатчика. Далее он возьмет контроль удержания предмета на себя. В том случае, если произойдут перебои с электричеством и объект упадет, то после подачи питания он уже не взлетит без вмешательства человека.
Это создает впечатление его реальной левитации. Данная технология является весьма популярной при производстве сувениров. Примером ее реализации является летающий глобус. Недостаток данного способа заключается в определенной сложности запуска устройства. Необходимо закрыть фотодатчик, приподнять предмет для левитации, после чего открыть систему фотодатчика. Далее он возьмет контроль удержания предмета на себя. В том случае, если произойдут перебои с электричеством и объект упадет, то после подачи питания он уже не взлетит без вмешательства человека.
Для реализации данной технологии применяются диамагнетики. Эти вещества намагничиваются против внешнего магнитного поля. Отдельные материалы могут полностью вытеснять свое магнитное поле. Примером такого вещества является графит. Довольно известным экспериментом является магнитная левитация стержня из обычного карандаша. Он зависает над неодимовыми магнитами. Для этого их необходимо расставить в шахматном порядке поворачивая разными полюсами к верху. При таких условиях стержень не будет вытолкнут за пределы площадки, поэтому останется левитировать постоянно. Неодимовые магниты имеют более стабильное поле, поэтому если созданная поверхность в шахматном порядке будет иметь достаточную площадь, касательно длины графитового стержня, то тот зависнет неподвижно.
При таких условиях стержень не будет вытолкнут за пределы площадки, поэтому останется левитировать постоянно. Неодимовые магниты имеют более стабильное поле, поэтому если созданная поверхность в шахматном порядке будет иметь достаточную площадь, касательно длины графитового стержня, то тот зависнет неподвижно.
Живые существа тоже обладают свойствами диамагнетиков, поэтому под воздействием магнитного поля с высокой индукцией также могут парить. Примером этого является научный эксперимент с летающей лягушкой. Для некрупного земноводного достаточно создать индукцию больше 16 Тл, и лягушка начинает парить в воздухе на небольшой высоте.
СверхпроводниковаяМагнитная левитация по данной технологии также известна как метод Мейснера. Эффект парения достигается путем размещения магнита над сверхпроводником. В его качестве применяется оксид иттрия-бария-меди. Данное вещество приобретает способность сверхпроводника при снижении его температуры. Для этого необходимо обеспечение его контакт с жидким азотом.
Эксперимент по левитации подразумевает помещение пластины в ванночку с жидким азотом. Оксид иттрия-бария-меди практически мгновенно охлаждается. Если над ним поместить магнит, то тот начнет левитировать. Высота между магнитом и сверхпроводником напрямую зависят от силы индукции. Чем она выше, тем на большем расстоянии окажется магнит. Предмет как бы всплывает над сверхпроводником и весьма устойчиво парит до момента, пока пластина не остынет, потеряв свои свойства.
Вихретоковая магнитная левитацияЕще одним способом создания магнитной левитации является использование вихревых токов и массивных проводников. Катушка, выдающая вихревой ток может левитировать над замкнутым кольцом из цветного металла. Аналогичная ситуация наблюдается и с дисками из данного металла, уложенными над большими катушками.
Это обусловлено тем, что по закону Ленца индексируемый в данном случае цветной металл будет создавать магнитное поле противоположное от того, что на него воздействует. Иными словами, в каждый период колебания переменного тока в катушке будет создаваться противоположное по направлению магнитное поле. Поскольку они отталкивают друг друга, то более легкий предмет будет левитировать над тяжелым.
Иными словами, в каждый период колебания переменного тока в катушке будет создаваться противоположное по направлению магнитное поле. Поскольку они отталкивают друг друга, то более легкий предмет будет левитировать над тяжелым.
Еще одним примером вихревой левитации является пропускание неодимового магнита через толстостенную медную трубу. В этом случае постоянное парение не происходит, но магнит замедляется. Его падение сквозь трубу напоминает замедленную съемку или погружение в густую жидкость.
Масштабные применение эффекта паренияМагнитная левитация нашла свое применение не только при создании сувениров. Одним из самых масштабных способов использования данной технологии является современный железнодорожный транспорт на магнитной подушке. Такой поезд двигается очень тихо, поскольку не имеет колес, которые создают трение и стук. Как следствие самый известный проект такого транспорта, который был построен в Японии, смог развить скорость в 581 км/час. Единственный в мире поезд, который работает по данной технологии на постоянном маршруте, располагается в Шанхае. Он соединяет метро и аэропорт. Поезд позволяет преодолевать расстояние в 30 км между конечными станциями приблизительно за 7 минут.
Единственный в мире поезд, который работает по данной технологии на постоянном маршруте, располагается в Шанхае. Он соединяет метро и аэропорт. Поезд позволяет преодолевать расстояние в 30 км между конечными станциями приблизительно за 7 минут.
Похожие темы:
Как моделировать устройства, основанные на электродинамической магнитной левитации
Электродинамическая магнитная левитация может возникнуть при наличии переменного магнитного поля в окрестности проводящего материала. В этой статье мы расскажем и покажем, как моделировать магнитную левитацию, на двух примерах: верификационной задаче TEAM про устройство, основанное электродинамической левитации и модели электродинамического колеса.
Что такое электродинамическая магнитная левитация?
Явление электродинамической магнитной левитации возникает, когда вращающийся и/или движущийся постоянный магнит либо катушка с током создают переменное магнитное поле близи проводника. Переменное магнитное поле наводит вихревые токи в проводнике, которые создают поле в противоположном направлении.
Магнит, левитирующий над сверхпроводником. Изображение предоставлено Julien Bobroff. Доступно по лицензии CC BY-SA 3.0 из Wikimedia Commons.
Анализ эталонной задачи на электродинамическую левитацию
Рассмотрим верификационную задачу №28, описанную в Testing Electromagnetic Analysis Methods (TEAM) (от общества Compumag) и посвященную расчету электромагнитного левитирующего устройства В данной задаче круглый алюминиевый проводящий диск расположен над двумя цилиндрическими, концентрическими катушками переменного тока, протекающего в противоположных направлениях. Поперечное сечение элементов задачи показано на рисунке ниже.
Поперечное сечение концентрических катушек и алюминиевого диска. Все размеры указаны в миллиметрах.
3D модель изображена ниже.
3D-модель электродинамического левитирующего устройства. На ней изображёны левитирующий диск и две концентрических катушки переменного тока, протекающего в противоположных направлениях.
Для моделирования такого устройства в программном обеспечении COMSOL Multiphysics® мы используем 2D осесимметричную геометрию. Будем использовать физический интерфейс Magnetic Fields (Магнитные поля), который доступен в модуле AC/DC и позволяет корректно описать переменные токи в катушках, а также наводимые вихревые токи. Концентрические катушки с протекающими в противоположных направлениях токами опишем с помощью двух отдельных узлов Coil (Катушка), выбрав в настройках Homogenized Multi-Turn Coil (Гомогенизированная многовитковая катушка). Электродинамическая сила, возникающая в алюминиевом диске, будет рассчитана с помощью узла Force Calculation (Расчёт силы), который вычисляет тензор напряжений Максвелла.
Динамика твёрдого тела задаётся обыкновенным дифференциальным уравнением (ОДУ, англ. ODE) в физическом интерфейсе Global ODEs and DAEs. ОДУ первого порядка, задающие положение и скорость имеют следующий вид:
ODE) в физическом интерфейсе Global ODEs and DAEs. ОДУ первого порядка, задающие положение и скорость имеют следующий вид:
\frac {dv}{dt}=\frac{F_{em}-F_{g}}{m_p}
\frac{du}{dt}=v
Так как электродинамическая сила изменяется в зависимости от расстояния между диском и катушками, наша модель должна учитывать динамику изменения положения диска. Для этого мы воспользуемся интерфейсом Moving Mesh (Подвижная сетка). Ниже на графике мы привели сравнение опорных данных, указанных в тесте TEAM, и результатов, полученных с помощью моделирования в COMSOL.
Сравнение результатов моделирования и данных TEAM на одном графике. Показана зависимость перемещения диска от времени.
Анимация перемещения диска над двумя концентрическими катушками в течении 0.6 с.
Моделирование электродинамического колеса в COMSOL Multiphysics®
Механические вращение источников магнитного поля, таких как радиально намагниченный ротор Халбаха, наводит вихревые токи в проводящем материале (например, алюминии). Они создают противоположно направленное магнитное поле, которое взаимодействует с источником магнитного поля и отталкивает его. Одновременно создаются подъемная сила и сила тяги. Такое устройство называется электродинамическим колесом (ЭДК).
Они создают противоположно направленное магнитное поле, которое взаимодействует с источником магнитного поля и отталкивает его. Одновременно создаются подъемная сила и сила тяги. Такое устройство называется электродинамическим колесом (ЭДК).
На рисунке ниже показан принцип левитации ЭДК при высокоскоростном движении. Сила тяги или тормозящая сила зависят от относительной скорости скольжения, sl, которая определяется, как разница между азимутальной vc и поступательной vx скоростями. Например, sl = vc — vx, где vc = ωmro и ωm = ωeP. Где ωm — это механическая угловая скорость, ωe — электрическая угловая скорость, P — число пар полюсов ротора Халбаха.
Конструкция четырёхполюсного ЭДК, основанного на принципе магнитной левитации (maglev — маглева). На рисунке изображёны проводящий слой и вращающийся и/или перемещающийся ротор Халбаха.
На рисунке изображёны проводящий слой и вращающийся и/или перемещающийся ротор Халбаха.
Если азимутальная скорость больше, чем поступательная (скольжение положительно), то создаётся подъёмная сила. В противном случае создаётся тормозящая сила.
Используя физический интерфейс Rotating Machinery in 2D and 3D, Magnetic (Вращающиеся машины в 2D и 3D), мы можем учитывать оба этих движения в одной модели. Вращательное движение задаётся узлом Prescribed Rotational Velocity (Заданное вращательное движение). Поступательное движение ротора Халбаха задаётся в противоположном направлении узлом Velocity (Lorentz) (Скорость по Лоренцу). Постоянные магниты задаются узлами Ampère’s Law (Закон Ампера) с указанием остаточной магнитной индукцией Br = 1.42[Тл]. Так как намагниченность создаётся в радиальном или азимутальном направлениях, для удобства выберем цилиндрическую систему координат.
В итоге, было выполнено моделирование переходного процесса для разных механических угловых скоростей ротора. На графиках ниже показаны зависимости подъёмной силы и силы тяги от времени. Две этих силы вычисляются различными способами: расчётом тензора напряжений Максвелла и методом Лоренца.
На графиках ниже показаны зависимости подъёмной силы и силы тяги от времени. Две этих силы вычисляются различными способами: расчётом тензора напряжений Максвелла и методом Лоренца.
На графиках изображены зависимости подъёмной силы и силы тяги от времени. Синим цветом показан расчёт тензора напряжений Максвелла, зелёным — метод Лоренца.
На втором этапе проводилось стационарное исследование для различных поступательных скоростей. Тормозящая сила возникает при отсутствии вращения или если азимутальная скорость меньше, чем прямолинейная. Результаты моделирования подъёмной и тормозящей силы для различных скоростей показаны на графиках ниже.
Зависимости подъёмной и тормозящей силы от времени. Синим цветом показан расчёт тензора напряжений Максвелла, зелёным — метод Лоренца.
Анимация показывает поверхностный график распределения магнитного поля в воздухе и магнитах; плотность тока в проводящем слое; силовые линии векторного магнитного потенциала, Az. Изображено вращение ротора по часовой стрелке и взаимодействие полей.
Изображено вращение ротора по часовой стрелке и взаимодействие полей.
Выводы по моделированию электродинамической магнитной левитации
В данной статье мы показали, как моделировать два электродинамических магнитных устройства, используя модуль AC/DC пакета COMSOL Multiphysics. Мы разобрали верификационную задачу №28 от TEAM: Электродинамическое левитирующее устройство и сравнили результаты моделирования с данными эксперимента. Также мы постарались доступно объяснить принцип действия электродинамического колеса, основанного на явлении магнитной левитации. Наши результаты моделирования оказались довольно точными и полностью сошлись с экспериментальными результатами.
Дополнительные ресурсы
- Узнайте больше о примерах, представленных в данной статье:
- Ознакомьтесь с тем, как другие пользователи COMSOL Multiphysics решают подобные задачи
- Следите за нашим блогом по проектированию Электромагнитных устройств
- Захотелось заняться моделированием устройств, основанных на принципе магнитной левитации в COMSOL Multiphysics или у вас остались какие-либо вопросы по поводу данной статьи? Свяжитесь с нами
Магнитная левитация высокотемпературного сверхпроводника
Актуальность
Ряд конференций последних лет рассматривает физические принципы, на основе которых можно было бы построить отечественную транспортную систему на основе магнитной левитации. Известно, что в Китае уже около 10 лет успешно эксплуатируется пассажирский поезд на магнитном подвесе маршрута Шанхай – Пудонг при скорости 430 км/ч. В связи с этим сотрудниками ИРЭ им. В. А. Котельникова РАН, где проводилась данная работа, была предложена тема магнитной левитации высокотемпературных сверхпроводников как безусловно актуальная, интересная и перспективная.
Известно, что в Китае уже около 10 лет успешно эксплуатируется пассажирский поезд на магнитном подвесе маршрута Шанхай – Пудонг при скорости 430 км/ч. В связи с этим сотрудниками ИРЭ им. В. А. Котельникова РАН, где проводилась данная работа, была предложена тема магнитной левитации высокотемпературных сверхпроводников как безусловно актуальная, интересная и перспективная.
Цель работы: исследовать, как вес левитирующего объекта влияет на зазор между этим объектом и магнитной трассой.
Содержание работы
Работа была проведена в лаборатории магнитных явлений Института радиотехники и электроники им. В. А. Котельникова РАН. В основу работы была заложена модель магнитного подвеса на основе высокотемпературного сверхпроводника.
Была проведена серия экспериментов, в результате которых немагнитной линейкой измерялся зазор между криостатом с ВТСП и магнитной трассой при различных грузах, размещаемых на криостате.
При ширине магнитной трассы 10 см максимальная масса груза, которую может выдержать левитирующий высокотемпературный сверхпроводник, составляет около 3,5 кг.
Оснащение и оборудование, использованное при создании работы
Высокотемпературный сверхпроводник YBCO, криостат из пенопласта, алюминиевые (немагнитные) подставки под криостат, магнитная трасса из магнитных кубиков со стороной 10 мм и В=0,3 Тл, сосуд Дюара (термос) и жидкий азот, набор грузов, весы Vibra для измерения массы грузов (точность 0,001 г), немагнитная пластиковая линейка, скотч, компьютер с приложением Excel.
Выводы
- Определена зависимость величины зазора от массы груза.
- Изучен принцип магнитной левитации.
- Получен необходимый опыт работы с оборудованием.
- Созданы условия, необходимые для левитации сверхпроводника.
Перспективы использования результатов работы
Проект будет продолжен в направлении использования результатов исследования в транспортировке грузов.
Сотрудничество с вузом/учреждением при создании работы
Институт радиоэлектроники им. В. А. Котельникова РАН.
В. А. Котельникова РАН.
Левитация. Электромагнитная и акустическая левитация. Сверхпроводимость
Гимназия №92, 112 классЛЕВИТАЦИЯ
Электромагнитная и акустическая.
Сверхпроводимость
Майя Самохина, Лысиков Александр
Определение левитации
Преодоление гравитации, при
котором субъект или объект парит в
пространстве, не касаясь
поверхности твёрдой или жидкой
опоры. Левитацией не
считается полёт, совершаемый за
счёт отталкивания от воздуха.
Физикой доказана способность
левитации за счёт электромагнитов,
звуковых волн, сверхпроводимости и
использования диамагнетиков.
Акустическая левитация
ЭЛЕКТРОМАГНИТНАЯ
Реализация, принцип действия и условия
1. Реализация данного вида левитации возможна при использовании электромагнита.
Важнейшими чертами электромагнита являются способность контролировать силу магнитного
поля, полярность и форму магнитного поля. Получается, что электромагнитное поле управляемо,
то есть, создаётся условие возможной свободной левитации. Сваливание и перевёртывание
магнита висящего в воздухе можно предотвратить мгновенным изменением электромагнитного
поля.
2. Левитация происходит за счёт установленного электромагнита, на который подаётся
генерируемый сигнал, способный изменять силу электромагнитного поля в зависимости от
положения левитирующего предмета, управляя сигналом с помощью оптических датчиков на
предмете.
3. Датчики являются необходимым условием электромагнитной левитации, так как способны
контролировать поведение вывешенного магнита или магнитопроницаемого тела. Самым
удачным датчиком можно считать Датчик Холла — датчик магнитного поля. Физик Холл заметил,
что если в магнитное поле поместить пластину под напряжением, то есть с протекающим по ней
током, то электроны в этой пластине отклонятся перпендикулярно направлению магнитного
потока. Направление такого отклонения зависит от полярности магнитного поля. Таким
образом, плотность электронов на разных сторонах пластины будет отличаться, что создаст и
разность потенциалов. Вот эту разность и улавливают датчики Холла.
4. Устойчивость левитации объекта определяет взаимное положение датчиков Холла. Они должны
быть разнесены на как можно большее расстояние друг от друга и находится в одной плоскости.
При правильной регулировке датчиков (при питании батареей 3,7 В) максимальный
потребляемый ток не должен превышать 100-120 mA. Смещение объекта по горизонтали, в
какую либо сторону, вызывает определённое усилие.
Схема строения датчика Холла
Измерительная пластина
Чувствительная поверхность
Активная зона
АКУСТИЧЕСКАЯ
Принцип действия
1. Акустическая левитация использует давление акустического излучения от
звуковых волн высокой интенсивности. Обычно используются звуковые волны на
ультразвуковых частотах, поэтому звук не слышен человеком. В первую очередь
это связано с высокой интенсивностью звука, необходимого для противодействия
гравитации. В зависимости от свойств объекта, таких как плотность и
сжимаемость, его можно заставить перемещаться либо в узлы акустического
давления (области минимального давления), либо в пучности давления (области
максимального давления).
2. Впервые этот вид левитации был реализован с помощью прототипа с массивом
квадратных акустических излучателей в виде шахматной доски, которые
перемещают объект из одного квадрата в другой, медленно снижая
интенсивность звука, излучаемого из одного квадрата, и одновременно
увеличивая интенсивность звука из другого, позволяя объекту перемещаться.
3. Этот метод сложнее контролировать, чем другие методы, такие как
электромагнитная левитация, но имеет то преимущество, что он может
левитировать непроводящие материалы.
СВЕРХПРОВОДИМОСТЬ
■ Важным свойством сверхпроводников является так эффект Мейснера,
заключающийся в вытеснении постоянного магнитного поля. Из этого
экспериментального наблюдения делается вывод о существовании
незатухающих токов внутри сверхпроводника, которые создают внутреннее
магнитное поле, противоположно направленное внешнему, приложенному
магнитному полю и компенсирующее его, что и создаёт отталкивание друг от
друга (левитацию).
СПАСИБО ЗА
ПРОСМОТР!
|
РОСЖЕЛДОР |
||
|
Федеральное государственное бюджетное образовательное учреждение высшего образования «Ростовский государственный университет путей сообщения» (ФГБОУ ВО РГУПС) |
||
|
||
|
«Для размещения в ЭИОС настоящая РПД подписана с использованием простой электронной подписи» |
||
|
Кафедра «Физика» |
||
|
РАБОЧАЯ ПРОГРАММА ДИСЦИПЛИНЫ |
||
|
1Б.О «Физические основы инновационных технологий в перевозочном процессе» |
||
|
по Учебному плану |
||
|
подготовки специалистов по специальности |
||
|
23.05.04 Эксплуатация железных дорог |
||
|
Профильная направленность |
||
|
Грузовая и коммерческая работа |
||
|
Квалификация выпускника «Инженер путей сообщения «, ФГОС ВО 3++ |
||
|
Ростов-на-Дону 2020 г. |
Автор-составитель д.ф-м.н., доц. Надолинский Алексей Михайлович предлагает настоящую Рабочую программу дисциплины 1Б.О «Физические основы инновационных технологий в перевозочном процессе» в качестве материала для проектирования Образовательной программы РГУПС и осуществления учебно-воспитательного процесса по федеральному государственному образовательному стандарту высшего образования.
Рабочая программа дисциплины рассмотрена на кафедре «Физика».
Экспертизу Рабочей программы дисциплины провел(а):
Грачев Олег Анатольевич, начальник службы технической политики, Северо-Кавказская железная дорога — филиал ОАО «РЖД».
Рекомендуемое имя и тип файла документа:
1БО_Физические о и т в п п_С_23.05.04_во_7_Физика_п45485_54901.doc
Наименование, цель и задача дисциплины
Дисциплина «Физические основы инновационных технологий в перевозочном процессе».
Учебный план по Образовательной программе утвержден на заседании Ученого совета университета от 29.03.2019 № 10.
Целью дисциплины «Физические основы инновационных технологий в перевозочном процессе» является подготовка в составе других дисциплин блока «Блок 1 — Дисциплины (модули)» Образовательной программы в соответствии с требованиями, установленными федеральным государственным образовательным стандартом высшего образования для формирования у выпускника общепрофессиональных компетенций, способствующих решению профессиональных задач в соответствии с типом задач профессиональной деятельности, предусмотренным учебным планом и профильной направленностью «Грузовая и коммерческая работа».
Для достижения цели поставлены задачи ведения дисциплины:
подготовка обучающегося по разработанной в университете Образовательной программе к успешной аттестации планируемых результатов освоения дисциплины;
подготовка обучающегося к освоению дисциплин «Взаимодействие видов транспорта», «Инновационные технологии в грузовой и коммерческой работе»;
подготовка обучающегося к защите выпускной квалификационной работы;
развитие социально-воспитательного компонента учебного процесса.
Перечень планируемых результатов обучения по дисциплине, соотнесенных с планируемыми результатами освоения Образовательной программы
| Планируемые результаты обучения по дисциплине | Установленные ОП компетенции и индикаторы их достижения |
| ОПК-1 — Способен решать инженерные задачи в профессиональной деятельности с использованием методов естественных наук, математического анализа и моделирования | |
|
Знает: физические основы механики, физики электромагнитных процессов, физики рентгеновских лучей, спектроскпии; методы экспериментального исследования структуры и свойств вещества Умеет: использовать основные законы физики в профессиональной деятельности для решения задач инновационных технологий магнитной и вакуумной левитации высокоскоростного ж/д транспорта Имеет навыки: применения методов математического описания физических явлений, определяющих принципы и концепции основных проектов инновационных видов высокоскоростного ж/д транспорта |
Индикатор: ОПК-1.1 — демонстрирует знания основных понятий и фундаментальных законов физики, применяет методы теоретического и экспериментального исследования физических явлений, процессов и объектов |
Место дисциплины 1Б.О «Физические основы инновационных технологий в перевозочном процессе» в структуре Образовательной программы
Дисциплина отнесена к Блоку 1Б Образовательной программы. Дисциплина входит в состав обязательной части (О).
Требования к входным знаниям, умениям и компетенциям обучающегося, необходимым для изучения данной дисциплины, соответствуют требованиям по результатам освоения предшествующих дисциплин : «Математика», «Общий курс железных дорог», «Физика».
Нормативный срок освоения Образовательной программы по очной форме обучения – 5 лет. Наименование формы и срока обучения из базы данных РГУПС (вид обучения): 5 лет очное, 5.8 лет заочное.
Обозначение-аббревиатура учебных групп, для которых данная дисциплина актуальна: .
Дисциплина реализуется в 7 семестре.
Объем дисциплины в зачетных единицах с указанием количества академических часов, выделенных на контактную работу обучающихся с преподавателем (по видам учебных занятий) и на самостоятельную работу обучающихся
Вид обучения: 5 лет очное
Общая трудоемкость данной дисциплины 3 зачетные единицы (108 часов), в том числе контактная работа обучающегося с преподавателем (КРОП) 32 часа.
| Виды учебной работы | Всего часов | КРОП, часов | Число часов в семестре |
| 7 | |||
| Аудиторные занятия всего и в т.ч. | 32 | 32 | 32 |
| Лекции (Лек) | 16 | 16 | 16 |
| Лабораторные работы (Лаб) | |||
| Практические, семинары (Пр) | 16 | 16 | 16 |
| Самостоятельная работа (СРС), всего и в т.ч. | 67 | 67 | |
| Контрольная работа (К) | |||
| Реферат (Р) | |||
| Расчетно-графическая работа (РГР) | |||
| Курсовая работа (КР) | |||
| Курсовой проект (КП) | |||
| Самоподготовка | 67 | 67 | |
| Контроль, всего и в т.ч. | 9 | 9 | |
| Экзамен (Экз) | |||
| Зачет (За) | 9 | 9 | |
| Общая трудоемкость, часы | 108 | 32 | 108 |
| Зачетные единицы (ЗЕТ) | 3 | 3 |
Вид обучения: 5.8 лет заочное
Общая трудоемкость данной дисциплины 3 зачетные единицы (108 часов), в том числе контактная работа обучающегося с преподавателем (КРОП) 8 часов.
| Виды учебной работы | Всего часов | КРОП, часов | Число часов в заезде | |
| 14 | 15 | |||
| Аудиторные занятия всего и в т.ч. | 8 | 8 | 4 | 4 |
| Лекции (Лек) | 6 | 6 | 4 | 2 |
| Лабораторные работы (Лаб) | ||||
| Практические, семинары (Пр) | 2 | 2 | 2 | |
| Самостоятельная работа (СРС), всего и в т.ч. | 96 | 32 | 64 | |
| Контрольная работа (К) | 12 | 12 | ||
| Реферат (Р) | ||||
| Расчетно-графическая работа (РГР) | ||||
| Курсовая работа (КР) | ||||
| Курсовой проект (КП) | ||||
| Самоподготовка | 84 | 32 | 52 | |
| Контроль, всего и в т.ч. | 4 | 4 | ||
| Экзамен (Экз) | ||||
| Зачет (За) | 4 | 4 | ||
| Общая трудоемкость, часы | 108 | 8 | 36 | 72 |
| Зачетные единицы (ЗЕТ) | 3 | |||
Содержание дисциплины, структурированное по темам (разделам) с указанием отведенного на них количества академических часов и видов учебных занятий
Содержание дисциплины
| № | Раздел дисциплины | Изучаемые компетенции |
| 1 | Законы электромагнетизма и магнитная левитация | ОПК-1 |
| 2 | Магнитная левитации и железнодорожный транспорт | ОПК-1 |
| 3 | Вакуумный поезд – проекты и перспективы | ОПК-1 |
| 4 | Физические основы инновационных технологий современных видов транспорта | ОПК-1 |
| 5 | Физические основы технологий досмотра грузов | ОПК-1 |
Отведенное количество часов по видам учебных занятий и работы
Вид обучения: 5 лет очное
| Номер раздела данной дисциплины | Трудоемкость в часах по видам занятий | |||
| Лекции | Практические занятия, семинары | Лабораторные работы | Самоподготовка | |
| 1 | 6 | 6 | 16 | |
| 2 | 2 | 2 | 12 | |
| 3 | 4 | 4 | 14 | |
| 4 | 2 | 2 | 12 | |
| 5 | 2 | 2 | 13 | |
| Итого | 16 | 16 | 67 | |
| В т.ч. по интерактивным формам | 6 | 4 | ||
Вид обучения: 5.8 лет заочное
| Номер раздела данной дисциплины | Трудоемкость в часах по видам занятий | |||
| Лекции | Практические занятия, семинары | Лабораторные работы | Самоподготовка | |
| 1 | 2 | 2 | 84 | |
| 2 | 2 | |||
| 3 | ||||
| 4 | 2 | |||
| 5 | ||||
| Итого | 6 | 2 | 84 | |
| В т.ч. по интерактивным формам | ||||
Лекционные занятия
Вид обучения: 5 лет очное
| Номер раздела данной дисциплины | Наименование лекционных занятий | Трудоемкость аудиторной работы, часы |
| Семестр № 7 | ||
| 1 | Электромагнитное поле и его законы: 1) Закон Био – Савара – Лапласа 2) Теорема о циркуляции вектора магнитной индукции 3) Закон Фарадея-Максвелла. ЭДС индукции и самоиндукции. Правило Ленца 4) Взаимная индукция 5) Уравнения Максвелла в интегральной и дифференциальной форме. | 2 |
| Магнитомеханические явления: 1) Вычисление поля в магнетиках 2) Магнитная проницаемость и магнитная восприимчивость 3) Диамагнетизм 4) Парамагнетизм 5) Ферромагнетизм. | 2 | |
| Явление магнитной левитации: 1) Электромагнитная технология. 2) Диамагнитная технология 3) Сверхпроводимость и сверхпроводниковая технология 4) Вихретоковая магнитная левитация. | 2 | |
| 2 | Железнодорожный транспорт на магнитной подушке: 1) Электромагнитная подвеска (EMS-технология) 2) Электродинамическая подвеска (EDS-технология 3) Системы магнитной левитации на постоянных магнитах 4) Система RusMaglev 5) Инфраструктура поездов на магнитной подушке. | 2 |
| 3 | Технология ваккумного поезда: 1) Физические основы вакуумирования. Форвакуум 2) Аэродинамическое сопротивление 3) Проекты Hyperloop-поезда 4) Инфраструктура вакуумных поездов. | 2 |
| Технология поезда на воздушной подушке: 1) Вакуумный поезд Vactrain 2) Проект ET3 (ETT) 3) Вакуумно-трубопроводные транспортные технологии 4) Технология гравитационного поезда. | 2 | |
| 4 | Взаимодействие, координация и конкуренция транспортных технологий: 1) Автомобильный транспорт 2) Речной транспорт 3) Морской транспорт 4) Воздушный транспорт (гражданская авиация). | 2 |
| 5 | Рентгеновские установки досмотра грузов на станциях и терминалах железных дорог: 1) Методы интроскопии и неразрушающего контроля. 2) Рентгеновские излучение и рентгеновская аппаратура 3) Классификация видов досмотровой рентгеновской техники 4) Перспективные технологии досмотровых установок. | 2 |
Вид обучения: 5.8 лет заочное
| Номер раздела данной дисциплины | Наименование лекционных занятий | Трудоемкость аудиторной работы, часы |
| Заезд № 14 | ||
| 1 | Электромагнитное поле и его законы: 1) Закон Био – Савара – Лапласа 2) Теорема о циркуляции вектора магнитной индукции 3) Закон Фарадея-Максвелла. ЭДС индукции и самоиндукции. Правило Ленца 4) Взаимная индукция 5) Уравнения Максвелла в интегральной и дифференциальной форме. | 2 |
| 2 | Железнодорожный транспорт на магнитной подушке: 1) Электромагнитная подвеска (EMS-технология) 2) Электродинамическая подвеска (EDS-технология 3) Системы магнитной левитации на постоянных магнитах 4) Система RusMaglev 5) Инфраструктура поездов на магнитной подушке. | 2 |
| Заезд № 15 | ||
| 4 | Взаимодействие, координация и конкуренция транспортных технологий: 1) Автомобильный транспорт 2) Речной транспорт 3) Морской транспорт 4) Воздушный транспорт (гражданская авиация). | 2 |
Лабораторный практикум
Вид обучения: 5 лет очное
Не предусмотрено.
Вид обучения: 5.8 лет заочное
Не предусмотрено.
Практические занятия (семинары)
Вид обучения: 5 лет очное
| Номер раздела данной дисциплины | Наименование (тематика) практических работ, семинаров | Трудоемкость аудиторной работы, часы |
| Семестр № 7 | ||
| 1 | Фундаментальные законы электромагнетизма. Уравнения Максвелла | 2 |
| Магнетики. Диамагнетизм и парамагнетизм. | 2 | |
| Сверхпроводимость. Эффект Мейсснера. Высокотемпературные сверхпроводники и их магнитные свойства | 2 | |
| 2 | Физические основания и принципы технологий магнитной левитации | 2 |
| 3 | Методы расчета сил магнитной левитации в системах магнит–сверхпроводник | 2 |
| Технологии и устройство конструкций магнитного подвеса. Форвакуум. Вакуумирование. Типы вакуумных насосов: форвакуумные, струйные, сорбционные, криогенные | 2 | |
| 4 | Координация и конкуренция транспортных технологий | 2 |
| 5 | Рентгеновские излучение и рентгеновская аппаратура | 2 |
Вид обучения: 5.8 лет заочное
| Номер раздела данной дисциплины | Наименование (тематика) практических работ, семинаров | Трудоемкость аудиторной работы, часы |
| Курс № 5 | ||
| 1 | Фундаментальные законы электромагнетизма. Уравнения Максвелла | 2 |
Самостоятельное изучение учебного материала (самоподготовка)
Вид обучения: 5 лет очное
| Номер раздела данной дисциплины | Наименование тем, вопросов, вынесенных для самостоятельного изучения | Трудоемкость внеаудиторной работы, часы |
| Семестр № 7 | ||
| 1 | Закон Фарадея-Максвелла. ЭДС индукции и самоиндукции. Правило Ленца | 16 |
| 2 | Инфраструктура поездов на магнитной подушке | 12 |
| 3 | Инфраструктура вакуумных поездов. | 14 |
| 4 | Взаимодействие и координация транспортных технологий | 12 |
| 5 | Перспективные технологии досмотровых установок | 13 |
Вид обучения: 5.8 лет заочное
| Номер раздела данной дисциплины | Наименование тем, вопросов, вынесенных для самостоятельного изучения | Трудоемкость внеаудиторной работы, часы |
| Курс № 5 | ||
| 1 | Закон Фарадея-Максвелла. ЭДС индукции и самоиндукции. Правило Ленца | 84 |
| Магнитомеханические явления: 1) Вычисление поля в магнетиках 2) Магнитная проницаемость и магнитная восприимчивость 3) Диамагнетизм 4) Парамагнетизм 5) Ферромагнетизм. | ||
| Явление магнитной левитации: 1) Электромагнитная технология. 2) Диамагнитная технология 3) Сверхпроводимость и сверхпроводниковая технология 4) Вихретоковая магнитная левитация. | ||
| Магнетики. Диамагнетизм и парамагнетизм. | ||
| Сверхпроводимость. Эффект Мейсснера. Высокотемпературные сверхпроводники и их магнитные свойства | ||
| 2 | Инфраструктура поездов на магнитной подушке | |
| Физические основания и принципы технологий магнитной левитации | ||
| 3 | Инфраструктура вакуумных поездов. | |
| Технология ваккумного поезда: 1) Физические основы вакуумирования. Форвакуум 2) Аэродинамическое сопротивление 3) Проекты Hyperloop-поезда 4) Инфраструктура вакуумных поездов. | ||
| Технология поезда на воздушной подушке: 1) Вакуумный поезд Vactrain 2) Проект ET3 (ETT) 3) Вакуумно-трубопроводные транспортные технологии 4) Технология гравитационного поезда. | ||
| Методы расчета сил магнитной левитации в системах магнит–сверхпроводник | ||
| Технологии и устройство конструкций магнитного подвеса. Форвакуум. Вакуумирование. Типы вакуумных насосов: форвакуумные, струйные, сорбционные, криогенные | ||
| 4 | Взаимодействие и координация транспортных технологий | |
| Координация и конкуренция транспортных технологий | ||
| 5 | Перспективные технологии досмотровых установок | |
| Рентгеновские установки досмотра грузов на станциях и терминалах железных дорог: 1) Методы интроскопии и неразрушающего контроля. 2) Рентгеновские излучение и рентгеновская аппаратура 3) Классификация видов досмотровой рентгеновской техники 4) Перспективные технологии досмотровых установок. | ||
| Рентгеновские излучение и рентгеновская аппаратура | ||
Фонд оценочных средств для проведения промежуточной аттестации обучающихся по дисциплине
Перечень компетенций с указанием этапов их формирования в процессе освоения Образовательной программы
| Компетенция | Указание (+) этапа формирования в процессе освоения ОП (семестр) |
| 7 | |
| ОПК-1 | + |
Описание показателей и критериев оценивания компетенций на различных этапах их формирования
| Компе- тенция | Этап формирования ОП (семестр) | Показатель оценивания | Критерий оценивания |
| ОПК-1 | 7 | Дуальная оценка на зачете | — полнота усвоения материала, — качество изложения материала, — правильность выполнения заданий, — аргументированность решений. |
| Выполненное практическое задание | — правильность выполнения заданий. |
Описание шкал оценивания компетенций
| Значение оценки | Уровень освоения компетенции | Шкала оценивания (для аттестационной ведомости, зачетной книжки, документа об образования) | Шкала оценивания (процент верных при проведении тестирования) |
| Балльная оценка — «удовлетворительно». | Пороговый | Оценка «удовлетворительно» выставляется обучающемуся, который имеет знания только основного материала, но не усвоил его деталей, допускает неточности, недостаточно правильные формулировки, нарушения последовательности изложения программного материала и испытывает трудности в выполнении практических навыков. | От 40% до 59% |
| Балльная оценка — «хорошо». | Базовый | Оценка «хорошо» выставляется обучающемуся, твердо знающему программный материал, грамотно и по существу его излагающему, который не допускает существенных неточностей в ответе, правильно применяет теоретические положения при решении практических работ и задач, владеет необходимыми навыками и приемами их выполнения. | От 60% до 84% |
| Балльная оценка — «отлично». | Высокий | Оценка «отлично» выставляется обучающемуся, глубоко и прочно усвоившему программный материал, исчерпывающе, последовательно, грамотно и логически стройно его излагающему, в ответе которого тесно увязываются теория с практикой. При этом обучающийся не затрудняется с ответом при видоизменении задания, показывает знакомство с литературой, правильно обосновывает ответ, владеет разносторонними навыками и приемами практического выполнения практических работ. | От 85% до 100% |
| Дуальная оценка — «зачтено». | Пороговый, Базовый, Высокий | Оценка «зачтено» выставляется обучающемуся, который имеет знания, умения и навыки, не ниже знания только основного материала, может не освоить его детали, допускать неточности, недостаточно правильные формулировки, нарушения последовательности изложения программного материала и испытывает трудности в выполнении практических навыков. | От 40% до 100% |
| Балльная оценка — «неудовлетворительно», Дуальная оценка — «не зачтено». | Не достигнут | Оценка «неудовлетворительно, не зачтено» выставляется обучающемуся, который не знает значительной части программного материала, допускает ошибки, неуверенно выполняет или не выполняет практические работы. | От 0% до 39% |
Типовые контрольные задания или иные материалы, необходимые для оценки знаний, умений, навыков, характеризующих этапы формирования компетенций в процессе освоения образовательной программы
Типовые контрольные задания
Курсовые проекты (работы)
Не предусмотрено.
Контрольные работы, расчетно-графические работы, рефераты
Для заочной формы обучения контрольная работа проводится в форме компьютерного тестирования на базе ЦМКО.
Перечни сопоставленных с ожидаемыми результатами освоения дисциплины вопросов (задач):
Зачет. Семестр № 7
Вопросы для оценки результата освоения «Знать»:
1) Индукция магнитного поля. Закон Био – Савара – Лапласа. Теорема о циркуляции вектора магнитной индукции. Магнитное поле соленоида.
2) Явление электромагнитной индукции. Закон Фарадея-Максвелла. Правило Ленца. Взаимная индукция.
3) Контур с током в магнитном поле. Индуктивность контура, соленоида. ЭДС самоиндукции.
4) Магнитная проницаемость. Магнитная восприимчивость Диамагнетики. Парамагнетики. Ферромагнетики. Электромагнит.
5) Уравнения Максвелла в интегральной и дифференциальной форме.
7) Магнитная левитация. Электромагнитная и диамагнитная технологии левитации.
6) Сверхпроводимость. Высокотемпературные сверхпроводники. Эффект Мейсснера. Сверхпроводниковая технология.
8) Токи Фуко. Магнитопровод. Вихретоковая магнитная левитация.
9) Технологии и устройства конструкций магнитного подвеса. Линейный электродвигатель.
10) Принципы отталкивания и притяжения электромагнитов. Технология электромагнитной подвески.
11) Сверхпроводящие электромагниты. Технология электродинамической подвески.
12) Технология магнитной левитации на постоянных магнитах.
13) Системы левитации на постоянных магнитах. Установка Хальбаха.
14) Система магнитной левитации RusMaglev
15) Инфраструктура поездов на магнитной подвеске.
16) Проекты высокоскоростных поездов в СССР и Российской Федерации.
17) Вакуумирование. Форвакуум. Типы вакуумных насосов: механические, струйные, криогенные.
18) Аэродинамические силы и аэродинамическое сопротивление.
19) Поезд Hyperloop-технологии. Инфраструктура Hyperloop-поезда.
20) Воздушная подушка.
21) Вакуумный поезд Vactrain. Проект поездп ET3 (ETT)
22) Вакуумно-трубопроводные транспортные технологии. Проекты гравитационного поезда.
23) Инновационные технологии автомобильного, речного, морского и воздушного транспорта.
24) Взаимодействие и конкуренция железнодорожного транспорта с другими его видами.
25) Методы интроскопии и неразрушающего контроля.
26) Классификация видов досмотровой рентгеновской техники.
Вопросы для оценки результата освоения «Уметь»:
1) Задача: нахождение величины и направления магнитных сил, действующих на электрические токи.
2) Задача: расчет индукции магнитных полей систем токов различной конфигурации.
3) Задача: расчет сил взаимной индукции.
4) Задача: расчет потока вектора магнитной индукции.
5) Задача: применение закона Фарадея, правила Ленца.
6) Задача: решение системы уравнений Максвелла в интегральной форме.
7) Задача: решение системы уравнений Максвелла в дифференциальной форме.
8) Расчет силы магнитной левитации в системах магнит–сверхпроводник.
9) Задача: расчет сил аэродинамического сопротивления
10) Задача: расчет аэродинамической подъемной силы.
Вопросы для оценки результата освоения «Иметь навыки»:
1) Опишите методику определения зависимости индукции магнитного поля катушки от силы тока в ней.
2) Опишите методику определения индукции магнитного поля подковообразного магнита с помощью технических весов.
3) Дайте описание явления, получившего название – эффект Мейсснера.
4) Опишите методику получения рентгеновских лучей на примере работы рентгеновской трубки.
5) Опишите метод получения рентгеновских спектров исследуемого вещества.
6) Опишите принцип работы установки, основанный на использовании метода сканирующего рентгеновского луча.
7) Опишите системы для проверки мало– и среднегабаритного багажа пассажиров на станциях и терминалах.
8) Опишите системы для проверки крупногабаритного груза и контейнеров.
9) Опишите метод качественного и количественного анализа, основанного на флуоресценции исследуемого вещества.
10) Опишите методику контроля физических лиц с помощью досмотровой рентгенотелевизионной техники.
Методические материалы, определяющие процедуру оценивания знаний, умений, навыков, характеризующих этапы формирования компетенций
| № п/п | Библиографическое описание |
| 1 | Методические указания, определяющие процедуру оценивания знаний, умений, навыков, характеризующих этапы формирования компетенций: учебно-методическое пособие / М.С. Тимофеева; ФГБОУ ВО РГУПС. — 3-е изд., перераб. и доп. — Ростов н/Д, 2020. — 60 с.: ил. — Библиогр.: с. 44 (ЭБС РГУПС) |
Для каждого результата обучения по дисциплине определены
Показатели и критерии оценивания сформированности компетенций на различных этапах их формирования
| Резуль- тат обуче- ния | Компе- тенция | Этап формиро-вания в процессе освоения ОП (семестр) | Этапы формирования компетенции при изучении дисциплины (раздел дисциплины) | Показатель сформиро- ванности компетенции | Критерий оценивания |
| ОПК-1 | 7 | 1, 2, 3, 4, 5 | Дуальная оценка на зачете | — полнота усвоения материала, — качество изложения материала, — правильность выполнения заданий, — аргументированность решений. | |
| 1, 2, 3, 4, 5 | Выполненное практическое задание | — правильность выполнения заданий. |
Шкалы и процедуры оценивания
| Значение оценки | Уровень освоения компетенции | Шкала оценивания (для аттестационной ведомости, зачетной книжки, документа об образовании) | Процедура оценивания |
| Балльная оценка — «отлично», «хорошо», «удовлетворительно». Дуальная оценка — «зачтено». | Пороговый, Базовый, Высокий | В соответствии со шкалой оценивания в разделе РПД «Описание шкал оценивания компетенций» | Зачет (письменно-устный). Выполнение практического задания в аудитории. |
| Балльная оценка — «неудовлетворительно». Дуальная оценка — «не зачтено». | Не достигнут |
Ресурсы электронной информационно-образовательной среды, электронной библиотечной системы и иные ресурсы, необходимые для осуществления образовательного процесса по дисциплине
Перечень учебной литературы для освоения дисциплины
| № п/п | Библиографическое описание | Ресурс |
| 1 | Физические методы перспективных транспортных технологий: учебное пособие к курсу лекций / А.Г. Кочур, Б.М. Лагутин, А.М. Надолинский [и др.]; ФГБОУ ВО РГУПС.– Ростов н/Д, 2019. – 93 с. | ЭБС РГУПС |
| 2 | Организация пассажирских перевозок [Электронный ресурс]: учебник / Под ред. А.Г. Котенко и Е.А. Макаровой. — М.: ФГБОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2015. — 136 с. | УМЦ ЖДТ |
| 3 | Общий курс транспорта: учеб. пособие / Каликина Т.Н. и др. — М.: ФГБУ ДПО «Учебно-методический центр по образованию на железнодорожном транспорте», 2018. — 216 с. | УМЦ ЖДТ |
Перечень учебно-методического обеспечения
| № п/п | Библиографическое описание | Ресурс |
| 1 | Надолинский А.М. Учебно-наглядное пособие — тематические иллюстрации по дисциплине «Физические основы инновационных технологий в перевозочном процессе». РГУПС. — Ростов н/Д, 2020. | ЭИОС РГУПС |
| 2 | Физические методы перспективных транспортных технологий: учебное пособие к курсу лекций / А.Г. Кочур, Б.М. Лагутин, А.М. Надолинский [и др.]; ФГБОУ ВО РГУПС.– Ростов н/Д, 2019. – 93 с. | ЭБС РГУПС |
Электронные образовательные ресурсы в сети «Интернет»
| № п/п | Адрес в Интернете, наименование |
| 1 | http://rgups.ru/. Официальный сайт РГУПС |
| 2 | http://cmko.rgups.ru/. Центр мониторинга качества образования РГУПС |
| 3 | https://portal.rgups.ru/. Система личных кабинетов НПР и обучающихся в ЭИОС |
| 4 | https://webinar.rgups.ru/. Электронный университет РГУПС |
| 5 | http://www.iprbookshop.ru/. Электронно-библиотечная система «IPRBooks» |
| 6 | https://www.biblio-online.ru/. Электронно-библиотечная система «Юрайт» |
| 7 | http://www.umczdt.ru/. Электронная библиотека «УМЦ ЖДТ» |
| 8 | http://jirbis2.rgups.ru/jirbis2/. Электронно-библиотечная система РГУПС |
| 9 | https://rgups.public.ru/. Электронная библиотека периодических изданий «public.ru» |
| 10 | https://e.lanbook.com/. Электронно-библиотечная система «Лань» |
Профессиональные базы данных и информационно-справочные системы
| № п/п | Адрес в Интернете, наименование |
| 1 | http://www.glossary.ru/. Глоссарий.ру (служба тематических толковых словарей) |
| 2 | http://www.consultant.ru/. КонсультантПлюс |
Лицензионное и свободно распространяемое программное обеспечение
| № п/п | Наименование | Произ- во |
| 1 | Microsoft Windows. Операционная система. | О |
| 2 | Microsoft Office / Open Office. Программное обеспечение для работы с различными типами документов: текстами, электронными таблицами, базами данных и др. | И |
О — программное обеспечение отечественного производства
И — импортное программное обеспечение
Описание материально-технической базы, необходимой для осуществления образовательного процесса по дисциплине
Помещения(аудитории):
учебные аудитории для проведения учебных занятий;
помещения для самостоятельной работы.
Для изучения настоящей дисциплины в зависимости от видов занятий используется:
Учебная мебель;
Технические средства обучения (включая стационарный либо переносной набор демонстрационного оборудования).
Самостоятельная работа обучающихся обеспечивается компьютерной техникой с возможностью подключения к сети «Интернет» и ЭИОС.
«____» _________________20___г.
Код РПД: 54901.
Устройство электромагнитной левитации
Необычные схемы
Левитация (от лат. levitas «легкость, легковесность») — физическое явление, при котором предмет без видимой опоры пари́т в пространстве, не касаясь твёрдой поверхности. Люди часто связывают это явление с магией, привидениями, НЛО и прочими невероятных явлениями.
С другой стороны, левитация относительно простое физическое явление для металлических предметов, находящихся в магнитном поле.
Предлагаю вам ознакомиться с устройством, предназначенным для левитации металлических предметов. Принцип работы прост. Для того, чтобы предмет мог висеть в пространстве, вместо постоянного магнита надо использовать электромагнит, управляемый с помощью электронной схемы таким образом, чтобы металлический предмет как бы парил на некотором расстоянии от электромагнита. За положением предмета в пространстве следит оптическая пара, которая состоит из инфракрасного фото и светодиодов. Если объект поднимается слишком высоко, то фотодиод будет менее освещен-ток через обмотку электромагнита уменьшится и его сила притяжения также уменьшится. Если объект опустится слишком низко, фотодиод будет более освещенным, ток через обмотку электромагнита увеличивается, и его сила притяжения увеличится.
Рис. 1 Схема устройства электромагнитной левитации
В схема управления устройства магнитной левитации (рис.1) используется операционный усилитель (ОУ) 1458 или 4558 и мощный MOSFET с теплоотводом. Опорное напряжение снимается с делителя R3-R4 и подается на неинвертирующий вход 3 ОУ. Контролируемое напряжение подается с делителя R2-VD2 на вход 2 ОУ. При небольшом изменении напряжения на R2-VD2 появляется сигнал рассогласования, который многократно, усиливается и изменяет напряжение на транзисторе VT1.
Электромагнит можно намотать на каркасе большого старого реле. Катушка содержит 1200 витков провода диаметром 0,4-0,5 мм. Железный сердечник имеет диаметр 8-10 мм.
Особых критериев для используемого фотодиода нет, можно использовать ту модель, которая есть у вас под рукой. Но т. к, их характеристики разнятся, резистором R1 настраивают четкую работу схемы при данных параметрах фотодиода.
Если у вас возникнут проблемы с устойчивостью работы устройства (объект вибрирует),то, возможно, потребуется изменить постоянную времени контура. Для этого необходимо экспериментально подобрать номинал конденсатора С1, от 22 мкф до 1мкф, пока цепь не станет работать устойчиво.
Лаборатория сильнопольных магнитов (HFML)
Не говоря уже о научной фантастике, наука знает разные способы левитации. Например, вертолет можно рассматривать как очень впечатляющее левитационное устройство, которое использует поток воздуха для удержания в воздухе.
Ученые также нашли много способов левитировать объекты без шума или без потребности в бензине или воздухе, используя электромагнитные поля. Левитирующие поезда и левитирующие дисплеи — всего лишь два примера электромагнитной левитации.Однако для удержания объекта на плаву всегда требуется источник энергии (по крайней мере, двигатель или аккумулятор). Удалите аккумулятор, и левитация неизбежно прекратится.
Реальная левитация
Современная наука знает только один способ достичь настоящей левитации, такой, что не требуется дополнительных затрат энергии, а левитация может длиться вечно. Эта левитация использует диамагнетизм, способность многих материалов отводить часть внешнего магнитного поля.Электроны в таких материалах немного меняют свои орбиты, вытесняя внешнее поле. В результате диамагнитные материалы отталкиваются сильными магнитными полями.
Три основные схемы, использующие различные аспекты диамагнетизма, обеспечивают истинную левитацию:
| Сверхпроводящая левитация | |
Обычные вещи, даже люди, могут левитировать, если их поместить в сильное магнитное поле.Хотя большинство обычных материалов, таких как дерево или пластик, кажутся немагнитными, все они обладают очень слабым диамагнетизмом. Такие материалы можно левитировать с помощью магнитных полей силой около 10 Тесла. | |
Очень низкие температуры (такие, что воздух превращается в жидкость) и мощные магниты (такие, что кастрюли вытягиваются с расстояния в несколько метров) — это не то, что вы, вероятно, будете иметь дома, чтобы иметь возможность наблюдать сверхпроводящую или диамагнитную левитацию.Теперь, наконец, появился способ создать миниатюрные левитирующие устройства. |
Диамагнитная левитация — Лаборатория сильнопольных магнитов (HFML)
Видеть — значит поверить: маленькая лягушка (живая!) И водяной шар левитируют внутри вертикального отверстия диаметром 32 мм соленоида Горького в магнитном поле около 16 Тесла.
Эти фотографии воды и лягушки, парящей внутри магнита (не на борту космического корабля), являются первыми наблюдениями магнитной левитации живых организмов при комнатной температуре. Они несколько нелогичны. Как они могут левитировать?
Урок №1: Все может левитироватьМагнитно левитировать можно любой материал и каждое живое существо на Земле.Молекулярный магнетизм присутствует всегда, хотя он очень слаб и обычно остается незамеченным. Может создаться впечатление, что окружающие нас материалы в основном немагнитны. Но это не так. Все они магнетичны. Мы называем их «диамагнитными». С достаточно сильными магнитными полями вы можете левитировать все диамагнитные материалы. В нашей лаборатории мы разрабатываем и производим магниты с очень сильными магнитными полями. Мы используем его для исследования молекул и материалов. И покажите миру левитирующую лягушку.
Как летает лягушка?
Чтобы объяснить, мы должны начать с самого начала.Вся материя во Вселенной состоит из маленьких частиц, называемых атомами. Каждый атом содержит электроны, которые вращаются вокруг ядра, называемого ядром. Если вы поместите атом в магнитное поле (или большой кусок материи, содержащий миллиарды и миллиарды атомов), электронам, движущимся по кругу внутри, это не очень понравится. Они меняют свое движение в направлении, противоположном внешнему воздействию. Они создают собственное магнитное поле. Атомы ведут себя как маленькие магнитные иглы, направленные в направлении, противоположном магнитному полю.Есть несколько материалов (например, железо), атомы которых немного сумасшедшие и любят находиться в магнитном поле. Их магнитные «иглы» ориентированы в одном направлении. Но это исключения из общего правила.
Гравитация и магнитная силаМагниты отталкивают друг друга, если вы пытаетесь соединить их одинаковые полюса, два северных или два южных полюса. Точно так же северный полюс внешнего поля будет пытаться оттолкнуть «северные полюса» намагниченных атомов.Наши магниты создают очень большое магнитное поле (примерно в 100-1000 раз больше, чем домашние магниты). В этом поле все атомы внутри лягушки действуют как очень маленькие магниты, создавая небольшое поле. Вы можете сказать, что теперь лягушка состоит из этих крошечных магнитов, которые отталкиваются большим магнитом. Сила, называемая диамагнитной силой, которая направлена вверх, оказывается достаточно сильной, чтобы компенсировать силу тяжести (направленную вниз), которая также действует на каждый атом лягушки.Итак, атомы лягушки вообще не чувствуют никакой силы, и лягушка плавает, как если бы она была в космическом корабле. Маленькая лягушка выглядела комфортно внутри магнита и впоследствии с радостью присоединилась к своим собратьям-лягушкам на факультете биологии. Хотите более веского объяснения? Тот, с формулами, можно найти ниже.
Почему вы использовали лягушку?
Какими бы обычными ни были биологические исследования, лягушки — редкие клиенты в физических лабораториях, и вы можете задаться вопросом, почему мы левитировали лягушек, а не «что-то научное».Мы приносим свои извинения тем, кто считает, что «настоящая физика» должна включать только непонятные вещества и быть всегда скучной. Левитация диамагнитного материала была впервые продемонстрирована в 1939 году, когда маленькие шарики графита и висмута левитировали в электромагните (исторические подробности см. Physics Today). Ученым потребовалось еще 50 лет, чтобы заново открыть для себя левитацию, когда физики из Гренобля подняли несколько органических материалов с помощью диамагнитной силы.
Когда мы, в свою очередь, заново открыли левитацию (не зная о предыдущих экспериментах) с левитирующей водой, мы были поражены, обнаружив, что 90% наших коллег не верили, что вода может левитировать.Мы хотели рассказать людям об этом явлении. Мы подняли в воздух живую лягушку и другие не очень научные объекты, такие как различные растения, лягушки, рыбы и мыши, из-за их очевидной привлекательности для более широкой аудитории и в надежде, что исследователи из различных дисциплин, не только физики, никогда не смогут никогда не забывайте об этой силе, которой часто пренебрегают, и о возможностях, которые она предлагает.
Что еще можно делать с диамагнетизмом?Диамагнитная левитация отличается от любого другого известного способа левитации или плавания предметов.Гравитационная сила компенсируется на уровне отдельных атомов и молекул. Фактически, это максимально близко — возможно, когда-либо — приблизиться к научно-фантастической антигравитационной машине. Поэтому не всегда необходимо организовывать космический полет для изучения эффектов микрогравитации — вместо этого можно проводить некоторые эксперименты внутри магнита. Как выращивание кристаллов или тканей тела без каркаса.
Будет или не будет левитировать: объяснение для вундеркиндовБудет ли объект левитировать в магнитном поле B, определяется балансом между магнитной силой F = M∇B и гравитацией mg = ρV g, где ρ — плотность материала, V — объем и g = 9.8 м / с 2 . Магнитный момент M = (χ / µ 0 ) VB, так что F = (χ / µ 0 ) BV∇B = (χ / 2µ 0 ) V∇B 2 . Следовательно, градиент вертикального поля ∇B 2 , необходимый для левитации, должен быть больше 2µ 0 ρg / χ. Молекулярная восприимчивость χ обычно составляет 10 -5 для диамагнетиков и 10 -3 для парамагнитных материалов, и, поскольку ρ чаще всего составляет несколько г / см 3 , их магнитная левитация требует градиентов поля ~ 1000 и 10 Тл 2 / м соответственно.Принимая l = 10 см в качестве типичного размера сильнопольных магнитов и B 2 ~ B 2 / л в качестве оценки, мы находим, что полей порядка 1 и 10 Тл достаточно, чтобы вызвать левитацию пара- и диамагнетизм. Этот результат не должен вызывать удивления, потому что, как мы знаем, магнитные поля менее 0,1 Тл могут левитировать сверхпроводник (χ = -1), и, согласно приведенным выше формулам, магнитная сила увеличивается как B 2 .
Справочная информация
Эта оригинальная работа, выполненная исследователями Неймегена, была впервые опубликована в Physics World, апрель 1997 г., стр.28. Наиболее полный отчет находится в:
Дополнительная литература: хорошая популярная книга по магнетизму — это «Движущая сила» Джеймса Ливингстона.
Сбор электромагнитной энергии на основе магнитной левитации: полуаналитическая нелинейная модель для преобразования энергии
Деван, А., Ай, С. У., Карим, М. Н. и Бейенал, Х. Альтернативные источники питания для удаленных датчиков: обзор. J. Источники энергии 245 (1), 129–143 (2014).
CAS ОБЪЯВЛЕНИЯ Статья Google Scholar
Халиг, А., Зенг, П. и Чжэн, К. Сбор кинетической энергии с использованием пьезоэлектрических и электромагнитных технологий — современное состояние. IEEE T. Ind. Electron. 57 (3), 850–860 (2010).
Артикул Google Scholar
Харб А. Сбор энергии: современное состояние. Обновить. Energ. 36 (10), 2641–2654 (2011).
CAS Статья Google Scholar
Парадизо, Дж. А. и Старнер, Т.Поглощение энергии для мобильной и беспроводной электроники. Pervasive Comput. 4 (1), 18–27 (2005).
Артикул Google Scholar
Митчесон, П. Д., Йитман, Э. М., Рао, Г. К., Холмс, А. С. и Грин, Т. С. Сбор энергии от движения человека и машины для беспроводных электронных устройств. Proc. IEEE 96 (9), 1457–1486 (2008).
Артикул Google Scholar
Биби, С.П., Тюдор М. Дж. И Уайт Н. М. Источники вибрации, собирающие энергию для микросистемных приложений. Измер. Sci. Technol. 17 (12), R175 – R195 (2006).
CAS Статья Google Scholar
Teng, X.-F., Zhang, Y.-T., Poon, C.C. & Bonato, P. Носимые медицинские системы для p-health. IEEE Rev. Biomed Eng. 1. С. 62–74 (2008).
Артикул Google Scholar
Чжан, К.Л. и Чен, В. К. Улавливатель широкополосной магнитной энергии. Прил. Phys. Lett. 96, 123507-1–123507-3 (2010).
ADS Google Scholar
Jang, S., Kim, I., Jung, H. & Lee, Y. Настраиваемый комбайн для сбора энергии вращения для низкочастотной вибрации. Прил. Phys. Lett. 99, 134102-1–134102-3 (2011).
ADS Google Scholar
Уорд, Дж. К. и Беренс, С. Алгоритмы адаптивного обучения для сбора энергии вибрации.Smart Mater. Struct. 17, 035025 (2008).
ADS Статья Google Scholar
Маллик, Д. и Рой, С. Двунаправленная электрическая настройка комбайнов электромагнитной энергии на основе FR4. Датчик. Actuat A-Phys. 2015. Т. 226. С. 154–162.
CAS Статья Google Scholar
Шариати, Н., Роу, У. С., Скотт Дж. Р. и Горбани, К. Многофункциональный высокочувствительный выпрямитель для улучшенного улавливания РЧ-энергии.Sci. Реп. 5, 9655 (2015).
CAS ОБЪЯВЛЕНИЯ Статья Google Scholar
Чжу Д., Тюдор М. Дж. И Биби С. П. Стратегии увеличения диапазона рабочих частот виброэнергетических комбайнов: обзор. Измер. Sci. Technol. 21, 022001 (2010).
ADS Статья Google Scholar
Харн Р. Л. и Ван К. В. Обзор недавних исследований по сбору энергии вибрации с помощью бистабильных систем.Smart Mater. Struct. 22, 023001 (2013).
ADS Статья Google Scholar
Суссманн, Х. Дж. Нелинейная управляемость и оптимальное управление (Марсель Деккер ИНК, 1990).
Болтянский В.Г. Достаточные условия оптимальности и обоснование метода динамического программирования. SIAM J. Control 4 (2), 326–361 (1966).
MathSciNet Статья Google Scholar
Соарес душ Сантуш, М.P. et al. Инструментальные имплантаты бедра: Системы электроснабжения. J. Biomech. 46 (15), 2561–2571 (2013).
Артикул Google Scholar
Соарес душ Сантуш, М. П. и др. Инструментальные замены тазобедренного сустава, замены бедренной кости и стабилизаторы перелома бедренной кости. Эксперт Rev. Med. Устройства 11 (6), 617–635 (2014).
CAS Статья Google Scholar
Мораис, Р.и другие. Генератор вибрации с двойным постоянным магнитом для интеллектуального протеза бедра. Датчик. Actuat A-Phys. 172, № 1, 259–268 (2011).
CAS Статья Google Scholar
Манн Б. П. и Симс Н. Д. Сбор энергии из нелинейных колебаний магнитной левитации. J. Sound Vib. 319 (1-2), 515–530 (2009).
ADS Статья Google Scholar
Авила Бернал, А.Г. и Линарес Гарсия, Л. Э. Моделирование архитектуры сбора электромагнитной энергии. Прил. Математика. Модель. 36 (10), 4728–4741 (2012).
MathSciNet Статья Google Scholar
Даллаго Э., Марчези М. и Венчи Г. Аналитическая модель вибрационного электромагнитного комбайна с учетом нелинейных эффектов. IEEE Trans. Power Electron. 25 (8), 1989–1997 (2010)
ADS Статья Google Scholar
Саха, К.Р., О’Доннелл, Т., Ван, Н. и Макклоски, П. Электромагнитный генератор для сбора энергии от движения человека. Датчик. Actuat A-Phys. 147 (1), 248–253 (2008).
CAS Статья Google Scholar
Munaz, A. Lee, B. & Chung, G. Исследование устройства сбора электромагнитной энергии с использованием многополюсного магнита. Датчик. Actuat A-Phys. 2013. Т. 201. С. 134–140.
CAS Статья Google Scholar
Фурлани, Э.П. и Сюэ, X. Анализ поля, силы и транспорта для доставки генов на основе магнитных частиц. Микрожидкость. Нанофлюид. 13 (4), 589–602 (2012).
CAS Статья Google Scholar
Сюэ, X. и Фурлани, Э. П. Наноструктурирование с помощью шаблонов частиц магнитного ядра-оболочки в градиентных полях. Phys. Chem. Chem. Phys. 16 (26), 13306–13317 (2014).
CAS Статья Google Scholar
Лю Л.И Юань Ф. Г. Сборщик энергии нелинейных колебаний с использованием диамагнитной левитации. Прил. Phys. Lett. 98 (20), 203507 (2011).
ADS Статья Google Scholar
Лю Л. и Юань Ф. Г. Диамагнитная левитация для сбора энергии нелинейных колебаний: теоретическое моделирование и анализ. J. Sound Vib. 332 (2), 455–464 (2013).
ADS Статья Google Scholar
Ван Х.Ю., Палагумми, С., Лю, Л., Юань, Ф. Г. Сборщик энергии вибрации на магнитной подвеске. Smart Mater. Struct. 22 (5), 055016 (2013).
ADS Статья Google Scholar
Palagummi, S. & Yuan, F. G. Оптимальная конструкция моностабильного комбайна для сбора энергии электромагнитных колебаний на основе вертикальной диамагнитной левитации. J. Sound Vib. 2015. Т. 342. С. 330–345.
ADS Статья Google Scholar
Фурлани, Э.П. Постоянный магнит и электромеханические устройства: материалы, анализ и приложения (Academic Press, 2001).
Фурлани, Э. П. Метод прогнозирования поля в двигателях с осевым полем на постоянных магнитах. IEEE Trans. Mag. 28 (5), 2061–2066 (1992).
ADS Статья Google Scholar
Фурлани, Э. П. Вычисление поля в двигателях с осевым полем на постоянных магнитах. IEEE Trans. Mag. 30 (5), 3660–3663 (1994).
ADS Статья Google Scholar
Фурлани Э. П. Формула силы левитации между магнитными дисками. IEEE Trans. Mag. 29 (6), 4165–4169 (1993).
ADS Статья Google Scholar
Крейк Д. Дж. Магнетизм: принципы и приложения. 342–244 (Джон Вили, 1995).
Вокоун, Д., Беледжиа, М., Хеллер, Л. и Шиттнер, П.Магнитостатические взаимодействия и силы между цилиндрическими постоянными магнитами. J. Magn. Magn. Матер. 321 (22), 3758–3763 (2009).
CAS ОБЪЯВЛЕНИЯ Статья Google Scholar
Карнопп Д. Компьютерное моделирование скачкообразного трения в механических динамических системах. J. Dyn. Систем.-Т АСМЭ 107 (1), 100–103 (1985).
Артикул Google Scholar
Палагумми, С., Zou, J. & F. Yuan, F. Горизонтальный харвестер энергии низкочастотной вибрации на основе диамагнитной левитации. J. Vib. Акуст. 137 (6), 061004 (2015).
Артикул Google Scholar
Деун, Дж. В. и Коулс, Р. Интегрирование произведений функций Бесселя с дополнительным экспоненциальным или рациональным множителем, Comput. Phys. Commun. 178. С. 578–590 (2008).
ADS MathSciNet Статья Google Scholar
Орфанидис, С.J. Оптимальная обработка сигналов: введение 2-е изд., Гл. 1-2 (Прентис Холл, 1996).
Исследование планарной системы электромагнитной левитации с использованием компенсации электродов и контроллеров LQR
Yaghoubi H (2013) Наиболее важные приложения магнитолевой подвески. J Eng. https://doi.org/10.1155/2013/537986
Артикул Google Scholar
An S, Ma Y, Cao Z (2009) Применение простого адаптивного управления к системе магнитной левитации.В: Вторая международная конференция по интеллектуальным вычислительным технологиям и автоматизации, 2009. ICICTA’09. IEEE
Лю Х., Чжан Х, Чанг В. (2009) ПИД-регулирование для системы поездов на магнитной подвеске. В кн .: Международная конференция по промышленным и информационным системам, 2009. ИИС’09. IEEE
Кумар Э.В., Джером Дж. (2013) Оптимальная настройка ПИД-регулятора на основе LQR для отслеживания траектории системы магнитной левитации. Процедура Eng 64: 254–264
Статья Google Scholar
Hypiusová M, Osuský J (2010) Конструкция ПИД-регулятора для модели магнитной левитации. В: Международная конференция
Chunfang L, Jian Z (2012) Разработка контроллера режима скольжения второго порядка для электромагнитного левитационного захвата, используемого в ЧПУ. В: Конференция по контролю и принятию решений (CCDC), 24-я китайская конференция, 2012 г. IEEE
Unni AC et al (2016) ПИД-регуляторы, нечеткие и LQR-контроллеры для систем магнитной левитации. В: Международная конференция по когенерации, малым электростанциям и районной энергетике (ICUE).IEEE
Shawki N, Alam S, Gupta AKS (2014) Проектирование и реализация системы магнитной левитации с использованием техники компенсации фазового опережения. В: 2014 9-й Международный форум по стратегическим технологиям (IFOST). IEEE
Shiao Y-S (2001) Разработка и реализация контроллера для системы магнитной левитации. Proc Natl Sci Counc 11 (2): 88–94
Google Scholar
Bohn G, Steinmetz G (1984) Технология электромагнитной левитации и наведения на испытательной установке «transrapid» Emsland.IEEE Trans Magn 20 (5): 1666–1671
Статья Google Scholar
Трампер Д.Л., Олсон С.М., Субраманян П.К. (1997) Линеаризирующее управление системами магнитной подвески. IEEE Trans Control Syst Technol 5 (4): 427–438
Статья Google Scholar
Ли С.Х. и др. (2000) Самонастраивающееся управление системами электромагнитной левитации. Control Eng Pract 8 (7): 749–756
Статья Google Scholar
Банерджи С., Прасад Д., Пал Дж. (2007) Проектирование, реализация и тестирование системы левитации с одной осью для подвески платформы. ISA Trans 46 (2): 239–246
Статья Google Scholar
Lim TM, Cheng S (2011) Магнитная левитация системы с одной степенью свободы с использованием одновременного приведения в действие и метода определения смещения. Мехатроника 21 (3): 548–559
Артикул Google Scholar
Siddiqui MR, Ahmad S, Asghar U (2017) Стабилизирующее управление электромагнитной левитацией 1-DOF жесткой ферромагнитной балки без поворота. Измерение 106: 35–45
Артикул Google Scholar
Xing F et al (2014) Управление силой левитации постоянного синхронного планарного двигателя на магнитной подвеске на основе метода линеаризации с многовариантной обратной связью. В: 2014 17-я Международная конференция по электрическим машинам и системам (ICEMS).IEEE
Пассажирский отдел (2018) Пассажирские перевозки в МСЖД. Международный союз железных дорог (МСЖД). https://uic.org/IMG/pdf/brochure_passagers.pdf. По состоянию на март 2018 г.
Пассажирский отдел (2018 г.) Ускоренный путь высокоскоростного железнодорожного транспорта к устойчивой мобильности. Международный союз железных дорог (МСЖД). https://uic.org/IMG/pdf/uic_high_speed_2018_ph08_web.pdf. По состоянию на май 2018 г.
(2017) Энергопотребление и выбросы CO 2 сосредоточены на пассажирских железнодорожных перевозках.Международное энергетическое агентство (МЭА) и Международный союз железных дорог (МСЖД). https://uic.org/IMG/pdf/handbook_iea-uic_2017_web3.pdf. По состоянию на ноябрь 2017 г.
Caballero-Ruiz A et al (2014) Система микропозиционирования для изучения нейронной активности у свободных крыс. В: 2014 Международная конференция по мехатронике, электронике и автомобильной технике (ICMEAE). IEEE
Zou D et al (2008) Разработка системного контроллера Maglev на основе методов линеаризации с обратной связью.В: Международная конференция по информации и автоматизации, 2008. ICIA 2008. IEEE
Чжан Ф., Суяма К. (1995) Нелинейное управление магнитной левитирующей системой с обратной связью с помощью подхода точной линеаризации. В: Материалы 4-й конференции IEEE по приложениям управления, 1995. IEEE
Бисвас П., Баннерджи С. (2012) Анализ рельсов и приводов типа UI и UU, используемых в системе электромагнитной левитации, с использованием программного обеспечения FEM. Int J Emerg Technol Adv Eng 2 (5): 32–39
Google Scholar
Sailan K, Kuhnert K (2013) Контроль углового положения двигателя постоянного тока с помощью ПИД-регулятора для управления гидравлическим насосом. В: Международная конференция по контролю, инженерии и информационным технологиям (CEIT’13)
Sintayehu C (2007) Магнитная левитация на стальном шаре. Аддис-Абебский университет, Аддис-Абеба
MATH Google Scholar
Электромагнитная левитация придает наноматериалам форму
Чтобы металлические наноматериалы выполняли свои обещания в области энергетики и электроники, им необходимо формировать форму — буквально.
Для обеспечения надежных механических и электрических свойств наноматериалы должны иметь согласованные, предсказуемые формы и поверхности, а также масштабируемые методы производства. Инженеры UC Riverside решают эту проблему путем испарения металлов в магнитном поле, чтобы направить повторную сборку атомов металла в предсказуемые формы. Исследование опубликовано в The Journal of Physical Chemistry Letters.
Изображение, показывающее струноподобные частицы, образованные железом и никелем, и более шаровидные кластеры, образованные медью.(Abbaschian, Zachariah, et. Al. 2021)Наноматериалы, которые состоят из частиц размером 1-100 нанометров, обычно создаются в жидкой матрице, что является дорогостоящим для приложений массового производства и во многих случаях не может производить чистые металлы. такой как алюминий или магний. Более экономичные производственные технологии обычно включают парофазные подходы для создания облака частиц, конденсирующихся из пара. Они страдают от недостатка контроля.
Реза Аббасчян, заслуженный профессор машиностроения; и Майкл Захария, выдающийся профессор химической и экологической инженерии в инженерном колледже Марлана и Розмари Борн в Калифорнийском университете в Риверсайде; объединили усилия для создания наноматериалов из железа, меди и никеля в газовой фазе.Они поместили твердый металл в мощную катушку электромагнитной левитации, чтобы нагреть металл до температуры выше точки плавления, испаряя его. Капли металла левитировали в газе внутри катушки и двигались в направлениях, определяемых их собственными реакциями на магнитные силы. Когда капли соединялись, они делали это упорядоченным образом, и исследователи узнали, что они могут предсказать, основываясь на типе металла и том, как и где они применяли магнитные поля.
Наночастицы железа и никеля образовывали агрегаты в виде струн, а наночастицы меди образовывали шаровые кластеры.При осаждении на углеродной пленке агрегаты железа и никеля придали пленке пористую поверхность, а углеродные агрегаты — более компактную и твердую поверхность. Свойства материалов на углеродной пленке отражают в большем масштабе свойства каждого типа наночастиц.
Поскольку поле можно рассматривать как «дополнение», этот подход может быть применен к любому источнику генерации наночастиц в паровой фазе, где важна структура, например, к наполнителям, используемым в полимерных композитах для магнитного экранирования или для улучшения электрического или механические свойства.
«Этот« управляемый полем »подход позволяет манипулировать процессом сборки и изменять архитектуру получаемых частиц с объектов с высокой фрактальной размерностью на структуры, похожие на струнные с более низкой размерностью. Напряженность поля можно использовать для управления размером этого устройства », — сказал Захария.
Аббасчиан и Захария присоединились к исследованию Панкаджа Гилдияла, Притвиша Бисваса, Стивена Херреры, Джорджа В. Малхолланда и Йонг Янга. Статья «Магнитно-направленная парофазная сборка металлических наноструктур низкой фрактальной размерности: эксперимент и теория» доступна здесь.
Электромагнитная левитация придает форму наноматериалам
На этом изображении показаны частицы, похожие на струны, образованные железом (Fe) и никелем (Ni), а также более шаровые кластеры, образованные медью (Cu). Изображение: Abbaschian, Zachariah, et. al. 2021.Чтобы металлические наноматериалы оправдали свои обещания в области энергетики и электроники, им необходимо в буквальном смысле сформировать форму.
Для обеспечения надежных механических и электрических свойств наноматериалы должны иметь согласованные, предсказуемые формы и поверхности, а также масштабируемые методы производства.Инженеры из Калифорнийского университета в Риверсайде решают эту задачу, испаряя металлы в магнитном поле, чтобы направить повторную сборку атомов металла в предсказуемые формы. Они сообщают о своей работе в статье Journal of Physical Chemistry Letters .
Наноматериалы, содержащие частицы размером 1–100 нм, обычно создаются в жидкой матрице, что является дорогостоящим для массового производства и во многих случаях не может производить наночастицы из чистых металлов, таких как алюминий или магний.Более экономичные методы производства обычно включают парофазные подходы, при которых облако частиц конденсируется из пара, но они страдают от недостатка контроля.
Реза Аббашьян, профессор машиностроения, и Майкл Захария, профессор химической и экологической инженерии, объединили свои усилия для разработки новой технологии создания наноматериалов из железа, меди и никеля в газовой фазе. Их метод заключается в помещении твердого металла в мощную катушку электромагнитной левитации, которая нагревает металл до температуры выше точки плавления, испаряя его.
Образующиеся в результате металлические капли левитируют в газе внутри катушки и движутся в направлениях, определяемых их внутренним взаимодействием с магнитными силами. Когда капли связываются, они делают это упорядоченным образом, который, как обнаружили исследователи, можно предсказать, исходя из типа металла и того, как и где они применяли магнитные поля.
Наночастицы железа и никеля образуют агрегаты в виде струн, а наночастицы меди — шаровые кластеры. При осаждении на углеродной пленке агрегаты железа и никеля придали пленке пористую поверхность, а углеродные агрегаты — более компактную и твердую поверхность.Свойства материалов на углеродной пленке отражают в больших масштабах свойства каждого типа наночастиц.
Поскольку магнитное поле можно рассматривать как «надстройку», этот подход может быть применен к любому парофазному методу создания наноматериалов, где важна структура, таких как наполнители, используемые в полимерных композитах для магнитного экранирования. Это также может помочь улучшить электрические и механические свойства наноматериалов.
«Этот« направленный на поле »подход позволяет манипулировать процессом сборки и изменять архитектуру получаемых частиц с объектов с высокой фрактальной размерностью на струноподобные структуры с более низкой размерностью.«Напряженность поля может быть использована для управления размером этого устройства», — сказал Захария.
Эта история адаптирована из материалов Калифорнийского университета в Риверсайде с редакционными изменениями, внесенными Materials Today. Взгляды, выраженные в этой статье, не обязательно отражают точку зрения Elsevier. Ссылка на первоисточник.
Как моделировать устройства электродинамической магнитной левитации
Электродинамическая магнитная левитация может возникать, когда рядом с проводящим материалом существуют изменяющиеся во времени магнитные поля.В этом сообщении блога мы продемонстрируем, как смоделировать этот принцип на двух примерах: тестовая задача TEAM для электродинамического левитационного устройства и электродинамического колеса.
Что такое электродинамическая магнитная левитация?
Электродинамическая магнитная левитация имеет место, когда вращающийся и / или движущийся постоянный магнит или катушка с током генерируют изменяющееся во времени магнитное поле в соседнем проводнике. Изменяющиеся во времени магнитные поля вызывают в проводнике вихревые токи, которые создают противоположное поле.Это, в свою очередь, вызывает силу отталкивания между проводящим материалом и магнитным источником. Этот процесс является основным принципом работы всех систем магнитной левитации.
Магнит, парящий над сверхпроводником. Изображение Жюльена Боброффа — Собственная работа. Под лицензией CC BY-SA 3.0 через Wikimedia Commons.
Анализ эталонной задачи электродинамической левитации
Давайте взглянем на эталонную модель, основанную на задаче 28 Методами переходного электромагнитного анализа (TEAM): Устройство электромагнитной левитации.Эта проблема состоит в круглом алюминиевом проводящем диске, расположенном над двумя цилиндрическими концентрическими катушками, по которым проходят синусоидальные токи в противоположных направлениях. Поперечный разрез установки и размеры показаны на изображении ниже.
Поперечное сечение концентрических катушек и алюминиевого диска. Все размеры указаны в миллиметрах.
Модель показана в 3D ниже.
Трехмерная модель электродинамического левитационного устройства, показывающая левитирующий диск и две концентрические катушки, несущие изменяющиеся во времени токи в противоположных направлениях.
Для моделирования этого устройства в программном обеспечении COMSOL Multiphysics® мы используем двухмерную осесимметричную геометрию. Из-за изменяющихся во времени токов, а также индуцированных вихревых токов, мы моделируем магнитные поля, используя интерфейс Magnetic Fields в модуле AC / DC. Противоположные токоведущие катушки моделируются с использованием отдельных элементов Coil с моделью Homogenized Multi-Turn Coil . Электродинамическая сила вычисляется в алюминиевой пластине с помощью функции Force Calculation , которая вычисляет в ней тензор напряжений Максвелла.
Динамика твердого тела пластины решается как система обыкновенных дифференциальных уравнений (ОДУ) через интерфейс Global ODE и DAE . ОДУ первого порядка для положения и скорости даются по формуле:
\ frac {dv} {dt} = \ frac {F_ {em} -F_ {g}} {m_p}
\ frac {du} {dt} = v
Поскольку электромагнитная сила динамически изменяется в зависимости от расстояния между пластиной и катушкой, необходимо решить интерфейс Магнитное поле для динамического изменения положения пластины.Поэтому мы моделируем движение пластины с помощью интерфейса Moving Mesh . Мы сравниваем результаты моделирования и контрольные данные TEAM для соответствующего положения качающегося диска на следующем графике.
Сравнение результатов моделирования и данных TEAM вертикальных колебаний пластины как функции времени.
Анимация, изображающая колебания проводящего диска над двумя концентрическими катушками в течение 0,6 секунды.
Моделирование электродинамического колеса в COMSOL Multiphysics®
Механическое вращение источника магнитного поля, такого как радиально намагниченный ротор Хальбаха, индуцирует вихревые токи над пассивной проводящей направляющей (например.г., алюминий). Это создает противоположное магнитное поле, которое взаимодействует с исходным магнитным полем, создавая одновременно подъемную и тяговую силы. Это устройство называется электродинамическим колесом (ЭДВ).
Концепция левитации EDW для высокоскоростных перевозок проиллюстрирована на следующем рисунке. Производство тяги или тормозной силы зависит от относительной скорости скольжения, s l , определяемой как разница между окружной скоростью v c и поступательной скоростью v x .Например, s l = v c — v x , где v c = ω м r o и ω m = ω e P . Здесь ω м — механическая угловая скорость, ω e — электрическая угловая скорость, а P — количество пар полюсов в роторе Хальбаха.
Концептуальный дизайн четырехполюсной магнитной подвески EDW, изображающей токопроводящую дорожку и вращающийся и / или движущийся ротор Хальбаха.
Если окружная скорость больше поступательной скорости (для положительного скольжения), создается сила тяги. Если верно обратное, будет тормозное усилие.
Используя вращающееся оборудование в 2D и 3D, интерфейс Magnetic , мы можем объединить как поступательное, так и вращательное движение в одну и ту же модель. Вращательное движение задается с помощью функции «Предписанная скорость вращения» . Поступательное движение маглева (ротора Хальбаха) учитывается в проводящей дорожке с помощью члена Velocity (Lorentz) с противоположным знаком.Постоянные магниты моделируются с использованием характеристик по умолчанию Закона Ампера с остаточной магнитной индукцией B r = 1,42 [Тл]. Поскольку направление намагничивания радиальное или азимутальное, для удобства мы выбрали цилиндрическую систему координат.
Переходное моделирование выполняется для ступенчатого изменения механической угловой скорости ротора. Результаты для подъемной и осевой сил как функции времени показаны ниже. Эти силы рассчитываются двумя разными методами: тензором напряжений Максвелла (с использованием функции расчета силы) и методом Лоренца.
Сравнение подъемной и осевой сил на магнитной подвеске в зависимости от времени. Показаны результаты как тензора напряжений Максвелла, так и метода Лоренца.
На втором этапе стационарное моделирование выполняется для диапазона поступательных скоростей. Сила сопротивления создается, если нет вращения или окружная скорость меньше поступательной. Результаты моделирования подъемной силы и силы сопротивления для различных скоростей показаны ниже.
Сравнение подъемной силы и силы сопротивления на магнитопроводе в зависимости от скорости. Показаны результаты как тензора напряжений Максвелла, так и метода Лоренца.
Анимация, изображающая поверхностный график плотности магнитного потока в воздухе и магнитах; плотность тока в направляющей; и контурный график магнитного векторного потенциала A z . Показаны вращение ротора Хальбаха по часовой стрелке и взаимодействия полей.
Резюме по моделированию электродинамической магнитной левитации
В сегодняшней записи блога мы продемонстрировали, как смоделировать два электродинамических устройства магнитной левитации с помощью COMSOL Multiphysics и дополнительного модуля AD / DC.Мы рассмотрели задачу TEAM 28: Электродинамическое левитационное устройство и сравнили результаты с экспериментальными данными из литературы. Мы также осветили принцип работы электродинамической системы магнитной левитации колеса. Результаты нашего моделирования показывают подъемную силу и силы сопротивления / тяги, создаваемые этой системой для ступенчатого изменения угловой скорости и различных поступательных скоростей.