


Эффективный источник питания трехфазного асинхронного двигателя Часть материала взята с сайта www.skif.biz и www.001-lab.com Данное устройство предназначено для питания трехфазных асинхронных двигателей, серийно выпускаемых промышленностью от источника низкого напряжения 12V или от осветительной сети ~220V. В отличие от всех подобных устройств, схема использует рекуперацию энергии обратной ЭДС обмоток двигателя, что позволяет в несколько раз снизить ток потребления двигателем, особенно на холостом ходу. Например, двигатель 0.6 кВт 1350 об/мин на холостом ходу при номинальной частоте вращения потребляет всего 4.5А от источника 12V или около 300 мА от сети ~220V. Такого потребления невозможно добиться при всех существующих способах запитки подобных двигателей. Устройство формирует полноценные 3 фазы для обеспечения нормального вращения двигателя, что позволяет плавно регулировать частоту вращения двигателя в широких пределах. При питании устройства от сети с использованием умножителя напряжения (на каждую фазу двигателя подается в этом случае 400V) мощность двигателя становится близкой к номинальной. При дальнейшем увеличении напряжения питания мощность увеличится пропорционально (при этом, естественно, увеличится потребляемый ток). Фактически, предельная мощность двигателя зависит от параметров силовых элементов схемы (тиристоров и фазных конденсаторов), а также, от диэлектрической прочности изоляции обмоток двигателя, от способности обмотки выдерживать мощные импульсы тока, от механической прочности корпуса двигателя. При усовершенствовании схемы (замене деталей в силовой цепи на более высоковольтные) с двигателя можно снять мощности больше в несколько раз, чем позволяют его паспортные характеристики. Мощность можно увеличивать до тех пор, пока не расплавится обмотка в точках соединения или не разнесет корпус двигателя. Как уже отмечалось, при этом, естественно, вырастет ток потребления. Также замечу, что устройство не является «вечным двигателем» — при существующем дизайне асинхронного двигателя снять с него «лишнее» не получится. Однако применение данной схемы позволяет легко повысить КПД двигателя от 0.6 до 0.9, что может быть важно для энергосберегающих проектов. КПД маломощного до 3 Квт асинхронного двигателя не может быть больше 70%, более мощные двигатели с большим количеством полюсов имеют КПД около 90%. Характерной особенностью схемы является полное отсутствие нагрева двигателя и элементов схемы. Обмотки двигателя питаются короткими и мощными высокоамперными импульсами, через обмотки не протекает постоянный ток. Это не позволяет обмоткам стать активной нагрузкой, что исключает их нагрев. Также, двигатель не греется (соответственно, не перегорает) в случае заклинивания ротора. В некотором роде, двигатель из асинхронного превращается в синхронный. Если судить по потребляемому току, получается, что при нагрузке вала, начинает пропорционально расти ток, однако когда нагрузка становится критической, энергия МП не в состоянии преодолеть силы торможения ротора, обороты двигателя резко падают, вал останавливается. При этом также, падает ток. Стоит отпустить ротор, он начинает раскручиваться и постепенно входит в режим синхронизации. После входа в этот режим можно снимать нагрузку с вала. Главный недостаток схемы состоит в низком пусковом моменте двигателя. При напряжении питания 200V на каждую фазу и начальной частоте 25 Гц пуск и синхронизация наступает за 3 — 5 сек (при используемом двигателе), дальше, можно резко увеличить частоту до номинального значения, при этом двигатель фактически мгновенно отрабатывает команду. К преимуществам такой схемы запитки двигателя можно отнести низкий уровень шума при работающем двигателе, полное отсутствие характерного «гудения», вибрации и т.д. Ротор вращается очень мягко, что позволяет услышать механические дефекты двигателя. Например, выяснилось, что в используемом двигателе был разбит передний подшипник — раньше, при нормальном включении за гулом и вибрацией этого не было слышно. Что касается современных т.н. «частотных преобразователей» используемых в металлообрабатывающих станках, последние например, питают двигатель прямоугольными импульсами, что создает очень мощный шум — как будто работает не двигатель, а сварочный трансформатор. При этом, двигатель, по прежнему остается асинхронным т.е. в нем присутствует эффект «проскальзывания» МП, что может приводить к плаванию оборотов под разной нагрузкой. Данная схема лишена подобного недостатка (см. выше), что делает ее привлекательной для подобных приложений. Используемые в схеме детали доступны, практически, каждому радиолюбителю, что позволяет легко повторить или улучшить схему. Требуются дальнейшие исследования данного способа включения двигателей, поэтому материал представляется в открытом виде. При повторении схемы, просьба сообщить об этом автору с целью обмена опытом.
Описание схемы Для начала следует вспомнить, как надо правильно питать подобные двигатели. В учебниках пишут, что асинхронные двигатели следует запитывать только синусоидальным трехфазным переменным током частотой 50Гц. Однако это не совсем так. Питание двигателя допускается любой формой сигналов в т.ч. прямоугольными импульсами. Существующие частотные преобразователи ШИМ позволяют не только регулировать частоту вращения ротора (она зависит только от частоты) но и мощность — она регулируется шириной импульса. Поскольку такие устройства существуют и серийно выпускаются промышленностью, можно сделать вывод, что форма сигнала не важна. Гораздо важнее правильное фазирование обмоток двигателя — при нарушении этого условия двигатель не будет крутиться вообще или не будет набирать обороты. Для понимания процесса фазирования двигателя вспомним, как выглядит 3х фазный переменный ток. 1. «А» Подавая такую последовательность импульсов на обмотки, двигатель придет в движение. Форма импульсов (синус или меандр) при этом совершенно не важна. Перед подключением двигателя следует произвести фазирование. Для этого, собираем цепь от низковольтного источника питания 12-24V, в разрыв которой включаем лампу (чтобы не сжечь двигатель или блок питания) и последовательно касаемся щупами клемм колодки двигателя, согласно схеме приведённой выше. Двигатель в этом случае, начнет немного вращаться. После того, как фазы и начала обмоток точно определены, их следует пометить. Это будет важно при подключении двигателя к собранному устройству. Схема источника питания состоит из трех функциональных блоков. Общая или силовая часть, генератор импульсов, инвертор напряжения. В целях снижения трудоемкости при изготовлении, а также, снижения помех, силовую часть и генератор целесообразно выполнить на одной плате. Инвертор может быть отдельным устройством (при питании от батареи) или его может не быть вообще в случае питания от осветительной сети. Последний способ не рекомендуется по причине опасности — в этом случае, часть элементов схемы может оказаться под смертельно опасным относительно «земли» напряжением, поэтому для отладки устройства такой способ нежелателен. Как отмечалось выше, генератор импульсов выдает последовательно 6 импульсов, необходимых для обеспечения создания вращающегося магнитного поля в двигателе. Между импульсами отсутствуют «мертвые» интервалы — в данной схеме смысл в них отсутствует. Частота импульсов задается частотой тактового генератора, для получения номинальной частоты 50 Гц необходима частота генератора 300 Гц. Генератор имеет возможность регулировки частоты с помощью переменного резистора. Каждый импульс на выходе генератора содержит пакет из серии импульсов частотой около 8 кГц, необходимый для управления тиристорами в силовой части схемы. Безусловно, тиристорами можно управлять постоянным током (токовым импульсом) однако такой способ нецелесообразен. Дело в том, что при таком способе управления потребуется применять другие способы «развязки» генератора от силовой части — например, использовать трансформаторы на «железе» или конденсаторы значительной емкости, что негативно скажется на надежности работы устройства. Также, управление тиристорами постоянным током энергозатратно — потребуются мощные ключи. Решение с развязывающими импульсными трансформаторами для данной схемы практически идеально т.к. такое управление решает сразу множество проблем. Итак, каждый из выходов импульсного генератора связан с первичной обмоткой трансформатора. Когда транзистор в цепи выхода генератора открыт (при логической 1 на соответствующем выходе микросхемы счетчика) в первичную обмотку трансформатора поступает пачка импульсов частотой 8 кГц, которая возбуждает такие-же импульсы во вторичной обмотке, связанной с управляющим электродом тиристора, т.е. образуется цепь: катод тиристора — обмотка трансформатора — управляющий электрод. Важно отметить, что в данном случае важна правильная фазировка обмотки трансформатора: на управляющий электрод должны приходить импульсы положительной полярности! Таким образом, схема коммутации обеспечивает создание вращающегося магнитного поля внутри двигателя. Ниже приводится сигналограмма на управляющем электроде любого из тиристоров. Требует пояснения цепь регенерации энергии. Известно, что имея заряженный конденсатор невозможно «напрямую» зарядить от него другой конденсатор так, чтобы напряжение на последнем было выше или равно исходному напряжению на первом конденсаторе. Поэтому, в цепи заряда применен дроссель. Однако, на самом деле, никакой это не дроссель, а часть контура, образованного с одной стороны конденсатором в инверторе большой емкости, катушкой дросселя, открытым тиристором и фазным конденсатором, заряд которого осуществляется в данный момент времени. Когда тиристор открывается, огромная энергия, запасенная электролитическим конденсатором большой емкости, устремляется в обмотку дросселя, вокруг последней создается мощное магнитное поле. В какой-то момент, энергия магнитного поля начинает спадать, и токи самоиндукции превращают дроссель в источник энергии. В итоге, фазный конденсатор заряжается несколько выше напряжения питания, а электролитический конденсатор немного разряжается, отчего создается разность потенциалов, которая не позволяет дальнейшее течение тока из источника питания в фазный конденсатор, тиристор в этот момент закрывается. Независимо от наличия или отсутствия на нем управляющих импульсов ток в этой цепи уже не потечет, поскольку фазный конденсатор заряжен больше источника питания. Таким образом, полная таблица коммутации двигателя с учетом регенерации энергии принимает следующий вид: 1. «А» Где Rx сигнал регенерации энергии в фазном конденсаторе соответсвующей фазы. Именно поэтому 3 из 6 импульсных трансформаторов двух обмоточные: вторая обмотка управляет тиристором в цепи регенерации энергии. Сигнал на фазном конденсаторе при работающем двигателе представлен в следующей осциллограмме: Фотогалерея устройства. Опытный асинхронный двигатель 0.6 кВт 1350 об/мин R обмоток 12 Ом, пр-во ГДР, 1970 г. Запуск асинхронного двигателя Налаживание устройства Перед включением устройства следует проверить правильность монтажа. Особенно тщательно нужно проверить отсутствие межобмоточных замыканий импульсных трансформаторов. В случае замыкания, разнесет не только тиристоры, но и низковольтную электронику. После выполнения проверок следует подать низковольтное питание на схему. Внимание! На данном этапе ни в коем случае не подавать на силовую часть никакое напряжение! Это можно сделать после того, как будет проверена и отлажена слаботочная часть схемы. Включив питание управления +12 V, сразу проверяем ток. Он не должен превышать 70-100 мА, если ток значительно больше — где-то в схеме КЗ или дохлая(е) микросхемы и т.д. Если ток меньше 50 мА где-то в цепях обрыв. Проверьте еще раз монтаж схемы. Если ток в норме, первым делом следует проверить напряжение на выходе внутреннего стабилизатора +9 V. Далее, проверяем работу генератора импульсов на микросхеме NE 555. К выходу микросхемы подключаем осциллограф и смотрим сигнал. Должны присутствовать короткие (около 20 мксек.) импульсы с амплитудой близкой к напряжению источника питания. Частота импульсов должна быть около 8 кГц. Убедившись в работоспособности этого узла, проверяем генератор на микросхеме К561ЛА7. С выхода генератора должны поступать симметричные прямоугольные импульсы, частота которых, в зависимости от положения движка переменного резистора «обороты» должна быть в пределах от 30 до 500 Гц. Теперь разбираемся с микросхемой К561ИЕ8 — с ее помощью осуществляется формирование фазных управляющих импульсов. Данная микросхема представляет собой десятичный счетчик, формирующий последовательно на каждом выходе сигнал логической «1» по спаду тактового импульса. Для проверки правильности работы этой микросхемы и монтажа, в задающем генераторе вместо конденсатора номиналом 10n временно устанавливаем конденсатор 1 мкф. Включаем устройство и смотрим на светодиоды, подключенные к выходам микросхемы К561ИЕ8. При исправной микросхеме должны последовательно зажигаться светодиоды с 1 по 6 и так по кругу. В работающем устройстве, естественно, все диоды будут просто светиться т.к. глаз человека не в состоянии видеть сигнал частотой выше 25 Гц. Все светодиоды должны светиться с одинаковой яркостью. В случае обрыва обмотки импульсного трансформатора, неисправности транзистора и т.д. диод светиться не будет или будет светиться в «пол накала». Именно поэтому в схеме вместо диодов используются светодиоды — для удобства отладки. Убедившись, что все в порядке, убираем конденсатор из генератора на 1 мкф. Включаем устройство и регулируем переменным резистором частоту тактового генератора. При наименьшей частоте светодиоды будут немного мерцать (особенно хорошо это видно боковым зрением) а при максимальной — светиться. При этом, работающая схема будет издавать характерный «писк», что свидетельствует о том, что в первичные обмотки импульсных трансформаторов поступают управляющие импульсы. Разбираемся с управляющими сигналами тиристоров. Еще раз проверяем разводку вторичных обмоток импульсных трансформаторов. Если все сделано правильно фазируем трансформаторы. Для этого «отвязываем» корпус осциллографа от земли и проверяем сигнал в цепи управляющего электрода каждого тиристора. Землю осциллографа «крокодилом» цепляем к катоду исследуемого тиристора, а щуп подключаем к управляющему электроду. На экране должны присутствовать пакеты импульсов ПОЛОЖИТЕЛЬНОЙ полярности (см. осциллограмму в начале файла) амплитудой не менее 5V. Так нужно последовательно проверить все тиристоры в схеме. На всех должен присутствовать управляющий сигнал. Закончив с этим, можно начать подавать питание на силовую часть схемы. Важное замечание. Помните, что импульсная техника не прощает ошибок! Если что-то пойдет не так, огромная энергия, запасенная электролитическим конденсатором большой емкости, вынесет тиристоры — сразу несколько штук. Будет примерно следующее: А всего-то дел: причина была в дребезге контактов в переменном резисторе подстройки оборотов. В какой-то момент цепь обрывалась, частота тут же возрастала в несколько раз, схема тут же захлёбывалась. Сквозные токи от источника питания (электролитического конденсатора) текли через тиристоры. Неравный бой между тиристорами и электролитическим конденсатором большой емкости всегда заканчивался победой последнего, результат — на картинке. Вдогонку, вынесло еще TL 494 в инверторе и мосфет IRF 1010. Печально, такой ущерб из-за копеечной детали. И хороший урок. Теперь переходим к самому интересному. Подаем на силовую часть сначала низковольтное питание от источника 12-24V через лампу на 5 Вт. Включаем сначала блок управления, ставим минимальную частоту оборотов. Далее, плавно поднимаем напряжение питания силовой части до 15-20 V. Смотрим на лампу. Светиться она не должна. Еще лучше, в разрыв питания силовой цепи включить амперметр: в случае нормальной работы устройства (работают контуры всех трех фаз) ток составит несколько миллиампер при таком напряжении питания и минимальной частоте. Если ток значительно больше (горит или светится в пол накала лампа) прут сквозные токи через схему. Если тока нет вообще — тиристоры не открываются. В случае нормального тока смотрим, что происходит на конденсаторах. Сигнал должен быть примерно такой: У меня получилось около 500 Гц, т.е. 500/6=83 Гц на каждую фазу. Характерно, но в работающем двигателе значение частоты, при которой наступает захлебывание несколько меньше. Определив предельную частоту можно начать подачу высокого напряжения на силовую часть. Включаем генератор, ставим минимальную частоту. Включаем инвертор и плавно увеличиваем напряжение на его выходе. Следим за током потребляемым устройством. Он должен начать расти по мере увеличения напряжения на выходе инвертора. Одновременно, смотрим напряжение на выходе инвертора. Если все идет хорошо, при 50 V двигатель начнет гудеть, при 150 V вал тронется, при 200 V начнет уверенный набор оборотов. Далее, наступит вход в режим синхронизации, гул и гудение снизится, а ток в цепи батареи составит около 3А. Если схема все еще жива, увеличиваем обороты двигателя до номинальных. Это легко т.к. двигатель уже синхронизирован, набор оборотов пройдет очень быстро. Ток при этом подскочит (в момент раскрутки) до 7-10А и тут-же упадет до 4.5 А после набора оборотов. Наслаждайтесь работой устройства. В этот момент следует проверить отсутствие нагрева деталей схемы (аккуратно!), измерить обороты вала, попробовать притормозить вал рукой, следя за потребляемым током. Для контроля оборотов и формы сигнала на фазе следует подключить к одному из фазных конденсаторов через резистор на 10 мОм щуп осциллографа и через резистор на 500 кОм частотомер (китайский мультиметр поддерживающий измерение частоты). Далее, следя за формой сигнала можно увеличить частоту до 100 Гц или выше, пока схема не захлебнется. Это нужно делать с осторожностью (см. выше) т.к. в этом случае сквозными токами вынесет тиристоры. Как показала практика, двигатель легко раскрутить до двойной частоты на каждой фазе, но делать этого все же не стоит. Вопросы, пожелания? Пишите: [email protected] Страница с материалом: http://83.142.8.22/lite/load_async.html Переделал схему в связи с недостатками о которых писал раньше. Теперь для формирования импульсов используется 18 разрядный десятичный счетчик, образованный последовательным соединением 2х микросхем К561ИЕ8. Таким образом, импульс регенерации заряда конденсатора подается в самом конце периода, что не мешает сбору контр ЭДС с обмотки в широком диапазоне нагрузок вала. Можно считать, что такое решение с таймингом почти идеально. Ток потребления на ХХ остался прежним, равно, как и все прочие параметры устройства, однако, удалось добиться ГЛАВНОГО. При торможении вала двигателя рукой перестал лавинообразно расти ток! Если до переделки при легком торможении ток подскакивал до 6А, а при торможении плоскогубцами до 10-15А, теперь ток не поднимается не при каких условиях выше 9А, дальше ротор просто останавливается и ток падает. Более точные результаты измерений под нагрузкой будут после того, как доделаю стенд. Подходящий генератор нашелся, правда он требует ремонта замены щеток… Да, чуть не забыл. Потребовалось уменьшить индуктивность зарядного дросселя т.к. в отличии от первого варианта, заряд должен осуществиться быстрее. Теперь дроссель 1 Мг 0.9 Ом. Без сердечника. Выкладываю сигналограммы новой схемы устройства. Как видите, добротность обмоток моторчика крайне низка. От ИП требуется довольно много тока для компенсации потерь. Если найти подходящий двиг (2-3 кВт год выпуска чем раньше тем лучше) можно получить довольно интересные результаты. На фазе. Частота 20 Гц. Частота 30 Гц. 50 Гц. Больше не раскручиваю. Берегу тиристоры 😉 Фазовый управляющий импульс в большом увеличении. Импульс регенерации в большом увеличении. 4 импульса регенерации. Дополнения от Fema (Skif.biz): Если в вашей силовой части перевернуть полярность подпитывающих тиристоров, и поменять полярность подключения источника питания, то целых три тиристора будут катодом сидеть на земле — а это даст возможность удалить три трансформатора, так как они уже не нужны, и напрямую (через огр.резистор) подключить транзисторы к трем тиристорам. При этом правда придется в генераторе подкорректировать разводку фаз к счетчику, что бы все приходило в нужное время (так как полярность подпитки конденсаторов изменилась) Это незначительное изменение в схеме дало резкое уменьшения количества деталей в силовой части. Дополнения от Fema (Skif.biz): По сути, там колебательный контур который после каждого полутакта заклинивается диодом-тиристором и ждет подходящего времени чтобы сделать следующий полупериод через другой тиристор в обратном направлении. Дополнения от asidalv (автор) (Skif.biz): Добротность на ХХ зависит главным образом от сопротивления обмотки, правильно? В моем варианте это 12.6 Ом, посему добротность никакая. Но взяв более мощный движок (2-3 кВт, 4х полюсный) у него будет ~ 3-5 Ом. Добротность на ХХ ожидается в районе 10, что уже неплохо. Допустим, R=5 Ом L=100 Мг С=10 Мкф тогда Q = (1 / 5) * ((100 / 1000) / (10 / 1000000)) ^ 0.5 = аж 20! частота при этом F = 1 / (6.2831 * Sqr((10 / 1000000) * (100 / 1000))) = 159 Гц Собственная частота резонанса обмоток при вращении естественно упадет и будет около 100 Гц, соответственно, коммутировать можно на близкой к этой частоте т.е. на валу получим около 3000 об/мин и приемлимый ток на ХХ. Теоретически, может быть закольцуется, это будет фантастика! Дополнения от asidalv (автор) (Skif.biz): Господа, внимание! Воистину, правильно заданный вопрос есть гарантия правильного ответа. Я невкурил до конца, мне с этого надо было тут начинать крик, а не со схемы источника питания индуктивной нагрузки. ИТАК, ПОЧЕМУ КОЛЛЕКТОРНЫЕ ДВИЖКИ ЖРУТ МНОГО ТОКА? ОТВЕТ. Для начала проведем два простых опыта с движком джефферсона-якоби образца 1837 года. Первый опыт — движок работает в холостую. Второй под нагрузкой, причем обороты движка под нагрузкой составляют 1/2 от оборотов холостого хода. Почему во втором случае он больше жрет? Коллекторный двигатель, какой бы конструкции он не был, имеет набор полюсных катушек ротора, подключаемых в процессе вращения с помощью щеточно-коллекторного узла к источнику питания. Каждая катушка, состоит из н-ного количества витков проволоки т.е. имеет ИНДУКТИВНОСТЬ. Из курса школьной физики вспоминаем, что ток в индуктивности, подключенной к источнику постоянного тока нарастает ПОСТЕПЕННО, а не сразу. В какой-то момент, рост тока прекращается и катушка индуктивности становится обычным РЕЗИСТОРОМ т.е. становится АКТИВНОЙ нагрузкой. Пока наш допотопный двигаль крутится в холостую и весело искрит щетками коммутация секций обмоток происходит БЫСТРО т.е. индуктивность обмоток не успевает насытится током, цепь питания разрывается коллектором и процесс повторяется. Ток при этом соответсвут паспортному току холостого хода. Теперь мы нагрузим двигатель. Затавим его, например, поднимать груз на высоту h так, чтобы его обороты упали от оборотов холостого хода в 2 раза. Каждая секция обмотки теперь находится под током, также, ровно в 2 раза ДОЛЬШЕ, чем на холостом ходу при этом, только половину этого времени катушка обмотки является индуктивностью а все остальное время — РЕЗИСТОРОМ. От этого получаем дикий нагрев движка, выгорание обмоток и… быстрое наполнение зеленью карманов Чубайса. Ситуация становится наиболее тяжелой в момент ПУСКА двигателя (трогания авто с места) или ЗАКЛИНИВАНИЯ ротора. В таком тяжелом режиме обмотки двигателя становится проволочными резисторами… Которые перегреваясь убивают движок и сажают аккумулятор. Прочтите эти абзацы несколько раз. Вдумайтесь. Когда я ПОНЯЛ это я почувствовал себя самым счастливым (и одновременно грустным) человеком на всей земле. Я пытаюсь докричаться до людей, но меня никто не хочет слушать… Устройство, которое делал Эд Грей, Тесла, ну еще и я немного руку приложил имеет фишку не в рекурперации (это вторично) а в том, что: ОНО НЕ ДАЕТ НЕ ПРИ КАКИХ ОСТОЯТЕЛЬСТВАХ ИНДУКТИВНОСТИ СТАТЬ РЕЗИСТОРОМ, И ПРИ ЭТОМ ПОДДЕРЖИВАЕТ НУЖНУЮ НАПРЯЖЕННОСТЬ МАГНИТНОГО ПОЛЯ, ЧТО ОБЕСПЕЧИТ ПОСТОЯННЫЙ ТЯГОВОЙ МОМЕНТ НАШЕГО ДВИГАТЕЛЯ! ТАКИМ ОБРАЗОМ СИЛЫ ТОРМОЖЕНИЯ РОТОРА НИКАК (практически) НЕ ВЛИЯЮТ НА ПОТРЕБЛЯЕМЫЙ УСТРОЙСТВОМ ТОК. Читать последний абзац несколько раз до полного понимания сути. Просто большиство из Вас, видимо, было не готово принять эту правду, после правильного вопроса, заданного MSN (skif.biz), я выдал такой вот ответ. И теперь этот путь доступен и Вам. Дополнения от MSN (Skif.biz): В идеале, такой двигатель должен потреблять всегда P=R*I^2, где: I-рабочий ток, а R-сопротивление обмоток, ключей и источника, пусть это будет ионистор… . Ну конечно же потери в стали никто не отменял, и потери в преобразователе который будет подпитывать ионистор компенсируя омические потери, тоже Поэтому есть перспектива уйти от очень емкой батареи. Один из смыслов нового дизайна — избавиться от двигательной ЭДС которая пожирает до 90% энергии источника. При этом прийдется вопреки дизайну ДПТ, где стремятся уменьшить индуктивность обмоток, — наоборт их увеличить. Это потребует увеличит напряжение источника, чтобы обеспечить рабочий ток. Но в такой схеме вся энергия использовавшаяся для создания тока в обмотках по окончании цикла опять вернется в источник, двигатель потребит только потреи что я описал выше, создав номинальный момент. И это не сказки. Такой двигатель был создан в штатах в 74 году Эдвином Греем, и чуть было не дошел до серийного производства. НО не дошел… Изобретателя предупредили, а когда тот не внял, его нашли мертвым .Знакомые и родственники отмечали его отменное здоровье на тот момент… Дополнения от asidalv (автор) (Skif.biz): Поздравляю! Как говорится эффект на лицо. А если дуть в обмоточку 2-3 кВ короткими импульсами частотой 50-70 Гц, при этом аккуратно собирая КЭДС в другой конденсатор получится искомый девайс товарища, который не дожил до наших светлых дней (сорри, дома клава барахлит). А сложность с резонансом — Вы сами правильно заметили, ИНДУКТИВНОСТЬ. Увеличив индуктивность, для создания нужной (прежней) энергии МП потребуется увеличить напругу, но это не проблема. зато резонанс появится во всей красе, причем в широком диапазоне нагрузок. Это нужно будет делать в случае увеличения индуктивности обмоток, т.к. при этом еще увеличится их сопротивление для создания прежней энергии МП (как было до перемотки). Потребуется поднять рабоее напряжение питания двигателя. Но зато появится возможность собирать КЭДС (т.е. теперь ваш двигатель сможет работать в резонансе). Если все сделать правильно, получится, собственно, девайс Грея, о котором я давно уже говорю. Еще много моментов, но путь выбран правильный. Дополнения от asidalv (автор) (Skif.biz): Чтобы создать примерно одинаковую энергию МП в жвигателе нужно: 1В 100А == 100B 1A == 1000В 0,1А С этим, надеюсь, все тут согласны? Понятно, что в третьем случае, потребуется делать инвертор DC-DC, за счет потерь в котором вы потеряете 10-20% в тепло и магнитные потери в трансформаторе. Однако, при питании двигателя ТАКИМ напряжением каждая полюсная обмотка будет состоять из большого количества витков, что даст возможность собирать с обмоток контрЭДС при каждом размыкании цепи и использовать эту КЭДС повторно т.е. осуществить рекурперацию энергии в процессе движения автомобиля, а не при торможении, как это вы тут делаете. В этом есть центральная идея и смысл девайсов Грея. Просто в его движках делается это настолько изящно что силы торможения ротора слабо влияют на потребляемый устройством ток. Насколько слабо — точно не известно, но (сужу по дискуссиям Хакенбергера) влияют весьма ощутимо. Эта область практически не изучена, во всяком случае я НЕ ЗНАЮ ни одного примера серийно выпускаемого электродвигателя где это явление используется с пользой. Рекурперация торможением — это понятно, это давно есть. А ЭТОГО — увы, НЕТ. И еще по поводу ВД. Нет достоверных сведений о том (опять-же, сужу по первоисточникам) что девайсы Грея были вечняками. Неизвестно, пытался ли он их «закольцевать». Поэтому вести на эту тему дискуссию, по крайней мере, на данном этапе бессмысленно. Измышления г-на Пети Лиденмана, который считал, что эти движки были вечняками не стоят гроша, брать оттуда информацию — себя не уважать. Даже беглый анализ патентов (а это почти все, что нам осталось от Грея) показывает что Лиденман лгал, причем, скорее всего, умышленно и весьма успешно. Настолько успешно, что буржуйские альтернативщики уже лет 10 искрят своими установками, получая мифическую радиантную энергию… К пониманию принципов работы этих устройств от не продвинулись не на шаг. Исключение — Бедини, ну может быть, еще пара человек. Но у них тоже не работает… Энергия не может принадлежать кому-то одному, потому что мы, и все вокруг нас — Энергия! Сайт: www.001-lab.at.ua |
Эффективный запуск трехфазного двигателя — Сделай сам своими руками
Данное устройство предназначено для питания трехфазных асинхронных двигателей, серийно выпускаемых промышленностью от источника низкого напряжения 12V или от осветительной сети ~220V. В отличии от всех подобных устройств, схема использует рекуперацию энергии обратной ЭДС обмоток двигателя что позволяет в несколько раз снизить ток потребления двигателем, особенно на холостом ходу. Например, двигатель 0.6 кВт 1350 Об/мин на холостом ходу при номинальной частоте вращения потребляет всего 4.5А от источника 12V или около 300 мА от сети ~220V. Такого потребления невозможно добиться при всех существующих способах запитки подобных двигателей. Устройство формирует полноценные 3 фазы для обеспечения нормального вращения двигателя, что позволяет плавно регулировать частоту вращения двигателя в широких пределах. При питании устройства от сети с использованием умножителя напряжения (на каждую фазу двигателя подается в этом случае 400V) мощность двигателя становится близкой к номинальной. При дальнейшем увеличении напряжения питания мощность увеличится пропорционально (при этом, естественно, увеличится потребляемый ток). Фактически, предельная мощность двигателя зависит от параметров силовых элементов схемы (тиристоров и фазных конденсаторов), а также, от диэлектрической прочности изоляции обмоток двигателя, от способности обмотки выдерживать мощные импульсы тока, от механической прочности корпуса двигателя. При усовершенствовании схемы (замене деталей в силовой цепи на более высоковольтные) с двигателя можно снять мощности больше в несколько раз, чем позволяют его паспортные характеристики. Мощность можно увеличивать до тех пор, пока не расплавится обмотка в точках соединения или не разнесет корпус двигателя. Как уже отмечалось, при этом, естественно, вырастет ток потребления. Также замечу, что устройство не является «вечным двигателем» — при существующем дизайне асинхронного двигателя снять с него «лишнее» не получится. Однако, применение данной схемы позволяет легко повысить КПД двигателя от 0.6 до 0.9, что может быть важно для энергосберегающих проектов (примечание: КПД маломощного до 3 Квт асинхронного двигателя не может быть больше 70%, более мощные двигатели с большим количеством полюсов имеют КПД около 90%). Характерной особенностью схемы является полное отсутствие нагрева двигателя и элементов схемы. Обмотки двигателя запитываются короткими и мощными высокоамперными импульсами, через обмотки не протекает постоянный ток. Это не позволяет обмоткам стать активной нагрузкой, что исключает их нагрев. Также, двигатель не греется (соответственно, не перегорает) в случае заклинивания ротора. В некотором роде, двигатель их асинхронного превращается в синхронный. Если судить по потребляемому току, получается, что при нагрузке вала, начинает пропорционально расти ток, однако когда нагрузка становится критической, энергия МП не в состоянии преодолеть силы торможения ротора, обороты двигателя резко падают, вал останавливается. При этом, также, падает ток. Стоит отпустить ротор, он начинает раскручиваться и постепенно входит в режим синхронизации. После входа в этот режим можно снимать нагрузку с вала. Главный недостаток схемы состоит в низком пусковом моменте двигателя. При напряжении питания 200V на каждую фазу и начальной частоте 25 Гц пуск и синхронизация наступает за 3 — 5 сек (при используемом двигателе), дальше, можно резко увеличить частоту до номинальной, при этом двигатель фактически мгновенно отрабатывает команду. К преимуществам такой схемы запитки двигателя можно отнести низкий уровень шума при работающем двигателе, полное отсутствие характерного «гудения», вибрации и т.д. Ротор вращается очень мягко, что позволяет услышать механические дефекты двигателя. Например выяснилось, что в используемом двигателе оказался разбит передний подшипник — раньше, при нормальном включении за гулом и вибрацией этого не было слышно. Что касается современных т.н. «частотных преобразователей» используемых в металлообрабатывающих станках, последние, например, питают двигатель прямоугольными импульсами, что создает очень мощный шум — как будто работает не двигатель а сварочный трансформатор. При этом, двигатель, по прежнему остается асинхронным т.е. в нем присутствует эффект «проскальзывания» МП, что может приводить к плаванию оборотов под разной нагрузкой. Данная схема лишена подобного недостатка (см. выше), что делает ее привлекательной для подобных приложений.
Описание схемы
Для начала следует вспомнить, как надо правильно питать подобные двигатели. В учебниках пишут, что асинхронные двигатели следует запитывать только синусоидальным трехфазным переменным током частотой 50Гц. Однако это не совсем так. Питание двигателя допускается любой формой сигналов в т.ч. прямоугольными импульсами. Существующие частотные преобразователи ШИМ позволяют не только регулировать частоту вращения ротора (она зависит только от частоты) но и мощность — она регулируется шириной импульса. Поскольку такие устройства существуют и серийно выпускаются промышленностью, можно сделать вывод, что форма сигнала не важна. Гораздо важнее правильное фазирование обмоток двигателя — при нарушении этого условия двигатель не будет крутиться вообще или не будет набирать обороты. Для понимания процесса фазирования двигателя вспомним как выглядит 3х фазный переменный ток.
Глядя на график, можно сделать следующий простой вывод. Для обеспечения вращения двигателя надо подать на его фазные обмотки 6 импульсов, соответствующие пикам каждой синусоиды трехфазного тока. Соответственно, если использовать генератор импульсов имеющий 6 выходов последовательно выдающий импульс на каждый выход можно обеспечить создание вращающего магнитного поля внутри двигателя, что заставит последний вращаться. Если представить, что каждая обмотка двигателя имеет точки начала и конца, то приложение напряжения к обмотке «А» в прямой полярности (т.е. на начало обмотки подводится «+») обозначить как «А» и в обратной полярности (на начало обмотки в этом случае подводится «-») обозначить как «А’» то полная схема коммутации обмоток примет следующий вид: 1. «А» 2. «C’» 3. «B» 4. «А’» 5. «C» 6. «B’» Подавая такую последовательность импульсов на обмотки двигатель придет в движение. Форма импульсов (синус или меандр) при этом совершенно не важна. Перед подключением двигателя следует его сфазирывать. Для этого, собираем цепь от низковольтного источника питания 12-24V в разрыв которой включаем лампу (чтобы не сжечь двигатель или блок питания) и последовательно касаемся щупами клемм колодки двигателя, согласно схеме приведенной выше. Двигатель в этом случае, начнет немного вращаться. После того, как фазы и начала обмоток точно определены их следует пометить. Это будет важно при подключении двигателя к собранному устройству. Схема источника питания состоит из трех функциональных блоков. Общая или силовая часть. Генератор импульсов. Инвертор напряжения. В целях снижения трудоемкости при изготовлении, а также, снижения помех, силовую часть и генератор целесообразно выполнить на одной плате. Инвертор может быть отдельным устройством (при питании от батареи) или его может не быть вообще в случае питания от осветительной сети. Последний способ не рекомендуется по причине опасности — в этом случае, часть элементов схемы может оказаться под смертельно опасным относительно «земли» напряжением http://energiatrend.ru/news/zamer-soprotivlenija-zazemljajuschih-ustrojstv , поэтому для отладки устройства такой способ нежелателен. Как отмечалось выше, генератор импульсов выдает последовательно 6 импульсов, необходимых для обеспечения создания вращающегося магнитного поля в двигателе. Между импульсами отсутствуют «мертвые» интервалы — в данной схеме смысл в них отсутствует. Частота импульсов задается частотой тактового генератора, для получения номинальной частоты 50 Гц необходима частота генератора 300 Гц. Генератор имеет возможность регулировки частоты с помощью переменного резистора. Каждый импульс на выходе генератора содержит пакет из серии импульсов частотой около 8 кГц, необходимый для управления тиристорами в силовой части схемы. Безусловно, тиристорами можно управлять постоянным током (токовым импульсом) однако такой способ нецелесообразен. Дело в том, что при таком способе управления потребуется применять другие способы «отвязки» генератора от силовой части — например использовать трансформаторы на «железе» или конденсаторы значительной емкости, что негативно скажется на надежности работы устройства. Также, управление тиристорами постоянным током энергозатратно — потребуются мощные ключи. Решение с развязывающими импульсными трансформаторами для данной схемы практически идеально т.к. такое управление решает сразу множество проблем. Итак, каждый из выходов импульсного генератора связан с первичной обмоткой трансформатора. Когда транзистор в цепи выхода генератора открыт (при лог. 1 на соответствующем выходе микросхемы счетчика) в первичную обмотку трансформатора поступает пачка импульсов частотой 8 кГц, которая возбуждает такие же импульсы во вторичной обмотке, связанной с управляющим электродом тиристора т.е. образуется цепь: катод тиристора — обмотка трансформатора — управляющий электрод. Важно отметить, что в данном случае важно правильное фазирование обмотки трансформатора: на управляющий электрод должны приходить импульсы положительной полярности! Таким образом, схема коммутации обеспечивает создание вращающегося магнитного поля внутри двигателя. Ниже приводится сигналограмма на управляющем электроде любого из тиристоров.
несколько импульсов
Нет необходимости описывать коммутацию каждой обмотки, идея, надеюсь, понятна. Чтобы заработало нужно просто правильно собрать схему и сфазирывать обмотки двигателя а также импульсные трансформаторы. Сейчас важно рассмотреть работу любой отдельной фазы для понимания механизма рекуперации энергии. Представим, что конденсатор, подключенный к обмотке фазы «А» полностью заряжен. В момент поступления на управляющий электрод тиристора сигнала, тиристор открывается. Ток начинает течь по цепи из конденсатора через обмотку и через открытый тиристор. В какой-то момент сила тока нарастает до такого состояния, что образованное вокруг катушки магнитное поле толкает ротор двигателя. Далее, энергия запасенная конденсатором начинает иссякать, его заряд постепенно истощается. В этот момент, энергия магнитного поля внутри двигателя начинает наводить вокруг фазной обмотки ЭДС самоиндукции, причем направление течения тока в цепи при этом не изменяется. Обмотка двигателя в этот момент сама становится источником энергии и начинается процесс заряда конденсатора напряжением с обратным знаком. Процесс продолжается до тех пор, пока энергия магнитного поля вокруг обмотки не иссякнет. В момент прекращения течения тока в цепи тиристор закрывается сам по себе. Поскольку открытый тиристор работает также как диод, в данной цепи не могут начаться гармонические затухающие колебания. Энергия, запасенная конденсатором (только с обратным знаком) в этот момент пригодна для последующего использования! Поскольку в схеме есть потери, требуется принятие специальных мер для постоянного пополнения запаса энергии в фазных конденсаторах, рассмотрим этот важный процесс. В тот момент, когда конденсатор фазы «А» заряжен напряжением с обратным знаком, рано или поздно, потребуется пропустить этот заряд через обмотку двигателя. Когда этот момент наступает, происходит процесс, аналогичный тому, что описан выше. Разница состоит в том, что по завершению этого процесса, на конденсаторе теперь положительное напряжение, соответствующее (по знаку) напряжению источника питания. Как отмечалось выше, в схеме всегда есть потери, поэтому напряжение на конденсаторе будет меньше исходного т.е. напряжения питания. Поскольку знак напряжения на конденсаторе совпадает со знаком напряжения источника питания, в этот благоприятный момент целесообразно выполнить регенерацию энергии, для чего по сигналу из соседней фазы, открывается соответствующий тиристор и конденсатор пополняется энергией. Требует пояснения цепь регенерации энергии. Известно, что имея заряженный конденсатор невозможно «напрямую» зарядить от него другой конденсатор так, чтобы напряжение на последнем было выше или равно исходному напряжению на первом конденсаторе. Поэтому, в цепи заряда применен дроссель. Однако, на самом деле, никакой это не дроссель, а часть контура, образованного с одной стороны конденсатором в инверторе большой емкости, катушкой дросселя, открытым тиристором и фазным конденсатором, заряд которого осуществляется в данный момент времени. Когда тиристор открывается, огромная энергия запасенная электролитическим конденсатором большой емкости устремляется в обмотку дросселя, вокруг последней создается мощное магнитное поле. В какой-то момент, энергия магнитного поля начинает спадать и токи самоиндукции превращают дроссель в источник энергии. В итоге, фазный конденсатор заряжается несколько выше напряжения питания, а электролитический конденсатор немного разряжается, отчего создается разность потенциалов, которая не позволяет дальнейшее течение тока из источника питания в фазный конденсатор, тиристор в этот момент закрывается. Независимо от наличия или отсутствия на нем управляющих импульсов ток в этой цепи уже не потечет поскольку фазный конденсатор заряжен больше источника питания. Таким образом, полная таблица коммутации двигателя с учетом регенерации энергии принимает следующий вид:
2. «C’» — Rb
3. «B»
4. «А’» — Rc
5. «C»
6. «B’» — Ra где Rx сигнал регенерации энергии в фазном конденсаторе соответствующей фазы. Именно поэтому 3 из 6 импульсных трансформаторов двухобмоточные: вторая обмотка управляет тиристором в цепи регенерации энергии. Сигнал на фазном конденсаторе при работающем двигателе представлен в следующей осциллограмме:
Двойная линия внизу — это глюк фотоаппарата. Просто «синусоида» немного покачивается когда двигатель вращается. Фото галерея устройства. Опытный асинхронный двигатель 0.6 кВт 1350 об/мин R обмоток 12 Ом. пр-во ГДР, 1970 г.в.
Блок управления и силовая часть. Между электроникой и тиристорами импульсные трансформаторы. Толстые провода к двигателю.
Банк фазных конденсаторов 3×10 мкф 250 вhttp://polezniysayt.ru К одному из них через резистор на 10 мОм подключен щуп осциллографа.
Дроссель, через который осуществляется регенерация энергии. Рядом конденсатор 470 мкф и предохранитель. Опасные штучки 😉
Инвертор 12 -> 200
А всего-то делов: причина была в дребезге контактов в переменном резисторе подстройки оборотов. В какой-то момент цепь обрывалась, частота тут же возрастала в несколько раз, схема тут же захлебывалась. Сквозные токи от источника питания (электролитического конденсатора) перли через тиристоры. Неравный бой между тиристорами и электролитическим конденсатором большой емкости всегда заканчивался победой последнего, результат — на картинке. В вдогонку, вынесло еще TL 494 в инверторе и мосфет IRF 1010. Печально, такой ущерб из-за копеечной детали. И хороший урок.
Теперь переходим к самому интересному.Подаем на силовую часть сначала низковольтное питание от источника 12-24V через лампу на 5 Вт. Включаем сначала блок управления, ставим минимальную частоту оборотов. Далее, плавно поднимаем напряжение питания силовой части до 15-20 V. Смотрим на лампу. Светиться она не должна. Еще лучше, в разрыв питания силовой цепи включить амперметр: в случае нормальной работы устройства (работают контуры всех трех фаз) ток составит несколько миллиампер при таком напряжении питания и минимальной частоте. Если ток значительно больше (горит или светится в пол накала лампа) прут сквозные токи через схему. Если тока нет вообще — тиристоры не открываются. В случае нормального тока смотрим что происходит на конденсаторах. Сигнал должен быть примерно такой:
Так нужно проверить все 3 фазы. Наличие такого сигнала свидетельствует от том, что схема работает. Теперь искусственно вводим схему в режим захлебывания чтобы определить примерную максимальную частоту тактового генератора. Для этого плавно увеличиваем частоту и смотрим на лампу. Как только лампа загорится — схема захлебнулась. При низком напряжении питания это не страшно — токи при таком напряжении не смертельны для тиристоров. Измеряем частоту генератора в этом случае. У меня получилось около 500 Гц т.е. 500/6=83 Гц на каждую фазу. Характерно, но в работающем двигателе значение частоты при которой наступает захлебывание несколько меньше.
Определив предельную частоту можно начать подачу высокого напряжения на силовую часть. Включаем генератор, ставим минимальную частоту. Включаем инвертор и плавно увеличиваем напряжение на его выходе. Следим за током потребляемым устройством. Он должен начать расти по мере увеличения напряжения на выходе инвертора. Одновременно, смотрим напряжение на выходе инвертора. Если все идет хорошо, при 50 V двигатель начнет гудеть, при 150 V вал тронется, при 200 V начнет уверенный набор оборотов. Далее, наступит вход в режим синхронизации, гул и гудение снизится, а ток в цепи батареи составит около 3А. Если схема все еще жива, увеличиваем обороты двигателя до номинальных. Это легко т.к. двигатель уже синхронизирован, набор оборотов пройдет очень быстро. Ток при этом подскочит (в момент раскрутки) до 7-10А и тут же упадет до 4.5 А после набора оборотов.
Наслаждайтесь работой устройства. В этот момент следует проверить отсутствие нагрева деталей схемы (аккуратно!), измерить обороты вала, попробовать притормозить вал рукой, следя за потребляемым током. Для контроля оборотов и формы сигнала на фазе следует подключить к одному из фазных конденсаторов через резистор на 10 мОм щуп осциллографа и через резистор на 500 кОм частотомер (китайский мультиметр поддерживающий измерение частоты). Далее, следя за формой сигнала можно увеличить частоту до 100 Гц или выше, пока схема не захлебнется. Это нужно делать с осторожностью (см. выше) т.к. в этом случае сквозными токами вынесет тиристоры. Как показала практика, двигатель легко раскрутить до двойной частоты на каждой фазе, но делать этого все же не стоит.
2SC3997 TO-3PBL 800В 20А
BU931P 400В 15А
Трёхфазные асинхронные двигатели: методы торможения хода
Главная страница » Трёхфазные асинхронные двигатели: методы торможения хода
Значительное число приводных систем используются при естественном замедлении работы двигателей в процессе остановки. Время, затрачиваемое на остановку ротора, измеряется исключительно инерционным моментом и моментом сопротивления вращению. Между тем нередко эксплуатация систем требует сокращать время остановки вала мотора и в этом случае электрическое торможение хода электродвигателя видится простым и эффективным решением. По сравнению устройствами, где применяются механический или гидравлический способы, электрическое торможение двигателей имеет явные преимущества в плане устойчивости действия и экономичности применения.
СОДЕРЖИМОЕ ПУБЛИКАЦИИ :
Варианты построения электрических тормозов
Рассмотрим несколько вариантов торможения двигателей электрическим способом, которые могут быть применимы на практике. При этом отметим возможности использования механизмов торможения по отношению к электродвигателям разных видов.
Список рассматриваемых методик торможения включает следующие:
- противотоком,
- вводом постоянного тока,
- электронным способом,
- сверхсинхронной скоростью,
- другими способами.
Принцип торможения противотоком
Мотор отключается от электросети, и пока ротор продолжает вращаться, вновь подключается противофазой. Такая система создаёт эффективный момент блокировки, обычно превышающий пусковой момент.
Между тем, этот эффективный момент торможения должен быть быстро нивелирован, чтобы двигатель после остановки не вращался в противоположном направлении.
Несколько устройств контроля и автоматики привлекаются для обеспечения замедления вращения вала электродвигателя до его полной остановки:
- датчики остановки фрикциона,
- датчики центробежного останова,
- хронометрические приборы,
- реле частоты,
- реле напряжения ротора (для двигателей с фазным ротором) и т. д.
Торможение двигателя с короткозамкнутым ротором
Прежде чем выбирать систему противотока для асинхронного мотора с КЗ ротором, важно обеспечить устойчивость двигателя к противоточному способу с учётом требуемой нагрузки.
Помимо механических напряжений, этот процесс подвергает ротор воздействию высоких тепловых нагрузок, так как энергия, выделяемая при каждой операции, рассеивается в теле ротора.
Тепловое напряжение на противотоке в три раза больше, чем при наборе скорости вращения. Здесь пики тока и крутящего момента заметно выше, если сравнивать с моментом пуска.
 Принцип методики противоточного воздействия на схему электродвигателя с целью быстрого замедления хода с последующей остановкой. Слева — нормальный рабочий цикл. Справа — цикл замедления и останова
Принцип методики противоточного воздействия на схему электродвигателя с целью быстрого замедления хода с последующей остановкой. Слева — нормальный рабочий цикл. Справа — цикл замедления и остановаПоэтому для обеспечения плавного останова двигателя системой противотока, как правило, последовательно с каждой фазой статора устанавливают резистор.
Благодаря такому добавлению, при переключении уменьшается крутящий момент и ток, до значений, равных тем, что отмечаются на статоре в режиме пуска.
Однако противоточная система торможения имеет ряд серьёзных недостатков. Поэтому этот способ для асинхронных двигателей с короткозамкнутым ротором используется в редких случаях и преимущественно на маломощных моторах.
Противоточное торможение на двигателях с фазным ротором
Чтобы ограничить ток и крутящий момент, прежде чем статор будет переключен на противоточный ход, крайне важно использовать резисторы ротора, используемые для запуска.
При этом следует периодично добавлять дополнительную резистивную секцию торможения. При правильно подобранном значении роторного резистора, регулировать тормозной момент до требуемого значения несложно.
Момент переключения тока даёт напряжение ротора практически в два раза большее, чем когда ротор находится в состоянии покоя, что иногда требует особых мер при изоляции.
 Принцип противоточной электрической блокировки на моторах с фазным ротором. Слева — нормальный режим работы. Справа — замедление с остановом
Принцип противоточной электрической блокировки на моторах с фазным ротором. Слева — нормальный режим работы. Справа — замедление с остановомКак и в случае с силовыми двигателями, цепь ротора выделяет значительное количество энергии. Вся выделенная энергия полностью рассеивается на резисторах (за исключением небольших потерь).
Двигатель может быть остановлен автоматически одним из вышеупомянутых устройств контроля. Например, с помощью реле напряжения или частоты в цепи ротора. С помощью схемы противотока удаётся поддерживать ведущую нагрузку с умеренной скоростью.
Однако характеристика крайне неустойчива (значительные колебания скорости по отношению к малым изменениям крутящего момента).
Торможение вводом постоянного тока
Этот вариант используется на двигателях с фазным и короткозамкнутым ротором. Если сравнивать с противоточной системой, стоимость применения источника выпрямленного тока компенсируется меньшим количеством резисторов.
Благодаря электронным регуляторам скорости и стартерам, этот способ торможения асинхронных электродвигателей видится вполне экономичным.
 Принцип останова путём ввода постоянного тока. Для работы этой системы требуется источник постоянного напряжения. Требования к величине напряжения не критичны
Принцип останова путём ввода постоянного тока. Для работы этой системы требуется источник постоянного напряжения. Требования к величине напряжения не критичныМетодика предполагает отключение обмоток статора от сети и подачу на обмотки выпрямленного тока. Прохождение выпрямленного тока по обмоткам статора сопровождается образованием фиксированного потока в воздушном зазоре между ротором и статорным кольцом двигателя.
Для достижения значения этого потока, способного обеспечить надлежащее торможение, ток должен быть примерно в 1,3 раза выше номинального тока.
Избыток тепловых потерь, неизбежно вызываемых этим незначительным превышением, обычно компенсируется временной паузой после останова мотора.
Критерии применения метода вводом постоянного тока
Поскольку значение тока зависит от сопротивления обмотки статора, напряжение на источнике выпрямленного тока невысокое. Обычно источником выступает схема выпрямителя или контроллера скорости.
Эти источники выпрямленного тока должны быть адаптированы к переходным скачкам напряжения, происходящим на обмотках в момент отсоединения от переменного источника питания.
Движение ротора здесь следует рассматривать скольжением относительно поля, зафиксированного в пространстве. Поведение двигателя аналогично синхронному генератору с разгрузкой на роторе.
Поэтому важны отличия характеристик, полученных на торможении вводом выпрямленного тока, по сравнению с противоточной схемой:
- Меньше энергии рассеивается на резисторах ротора или в теле ротора. Процесс эквивалентен механической энергии, массово выделяемой при движении. Единственная мощность, потребляемая от сети, — возбуждение статора.
- Когда нагрузка не является управляемой, двигатель не запускается в противоположном направлении.
- Если нагрузка является управляемой, система действует постоянно и удерживает нагрузку на низкой скорости. То есть достигается фактор замедления, а не полного торможения. Характеристика намного стабильнее, чем у системы противотока.
На моторах с фазным ротором характеристики крутящего момента зависят от выбора резисторов.
 Вариант тормозных резисторов: 1 — датчик нагрева; 2 — металлический шунт; 3 — высокотемпературный проводник; 4 — проволочный резистивный элемент; 5 — температурный блок; 6 — корпус
Вариант тормозных резисторов: 1 — датчик нагрева; 2 — металлический шунт; 3 — высокотемпературный проводник; 4 — проволочный резистивный элемент; 5 — температурный блок; 6 — корпусНа двигателях с короткозамкнутым ротором система позволяет легко регулировать момент торможения электродвигателя, воздействуя на энергетику постоянного тока.
Тем не менее, тормозной момент остаётся низким, если мотор имеет высокие обороты.
Торможение двигателей электронным и сверхсинхронным способом
Эффект электронного торможения достигается относительно просто с помощью регулятора скорости, оснащенного тормозным резистором.
Асинхронный двигатель действует как генератор. Механическая энергия рассеивается на ограничительном резисторе без увеличения потерь в самом двигателе.
Эффект торможения проявляется, когда двигатель достигает верхней точки синхронной скорости с переходом на более высокие значения.
Здесь фактически инициируется режим асинхронного генератора и развивается тормозной момент. Возникающие при этом потери энергии восстанавливаются электросетью.
Подобный режим работы проявляется на двигателях подъёмников при спуске груза с номинальной скоростью. Тормозной момент полностью уравновешивается крутящим моментом от нагрузки.
За счёт этого равновесия удаётся тормозить не ослаблением скорости, а выводом двигателя в режим работы на постоянной скорости.
Для варианта эксплуатации моторов с фазным ротором, все или часть резисторов ротора должны быть накоротко замкнутыми, чтобы двигатель не развивал движение значительно выше номинальной скорости.
Сверхсинхронная система функционально видится идеальной для ограничения движения под нагрузкой, потому что:
- Скорость остаётся стабильной и практически не зависит от вращающего момента,
- Энергия восстанавливается и возобновляется в сети.
Тем не менее, сверхсинхронное торможение электродвигателей поддерживает только одну скорость вращения, как правило, номинальное вращение.
На частотно-регулируемых двигателях используются сверхсинхронные схемы, благодаря которым изменяется скорость вращения вала от верхнего значения к нижнему значению.
Сверхсинхронное торможение легко достигается с помощью электронного регулятора скорости, который автоматически запускает эту систему при понижении частоты.
Другие тормозные системы
Редко, но всё-таки встречаются системы однофазного торможения. Эта методика включает питание двигателя между двумя фазами сети и подключает незанятый терминал к одному из двух других сетевых подключений.
 Вариант остановки простым реверсивным переключением — реверс поля вращения, образованного обмотками статора
Вариант остановки простым реверсивным переключением — реверс поля вращения, образованного обмотками статораТормозной момент ограничивается 1/3 максимального крутящего момента двигателя. Этой системой невозможно остановить мотор на полной нагрузке.
Поэтому такая схема традиционно дополняется противоточным методом. Вариант однофазной блокировки характеризуется значительным дисбалансом и высокими потерями.
Также применяется торможение электродвигателей ослаблением вихревых токов. Здесь работает принцип, аналогичный тому, что используется на промышленных транспортных средствах в дополнение к механическому торможению (электрические редукторы).
Механическая энергия рассеивается в редукторе скорости. Замедление и остановка электродвигателя контролируется простым возбуждением обмотки. Выраженный недостаток этого метода — значительное увеличение инерции.
Практический показ торможения вала двигателя динамически
По материалам: Schneider-electric
схема подключения многофазного асинхронного двигателя к источнику постоянного тока — патент РФ 2406217
Изобретение относится к области электротехники и может быть использовано в устройствах с батарейным питанием или питанием от сети постоянного тока. Техническим результатом является упрощение схемы подключения асинхронного двигателя к источнику питания. Указанный технический результат достигают тем, что схема подключения многофазного асинхронного двигателя к источнику постоянного тока содержит параллельные резонансные LC-контуры по числу обмоток двигателя. Каждый контур образован конденсатором и первичной обмоткой двухобмоточного дросселя, ко вторичной обмотке которого, индуктивно связанной с первой, подключена соответствующая обмотка, двигателя. Первичные обмотки дросселей контуров последовательно подключены к источнику постоянного тока через управляемый ключ, размыкающий цепь с заданной периодичностью. Каждый резонансный контур с включенной в него обмоткой двигателя настроен на собственную резонансную частоту. Значение резонансной частоты от контура к контуру вдоль цепи изменяется последовательно. 2 ил.
Рисунки к патенту РФ 2406217
Область техники, к которой относится изобретение
Изобретение относится к электротехнике и может найти применение в устройствах с батарейным питанием или питанием от сети постоянного тока.
Уровень техники
Асинхронный двигатель (АД) относится к электрическим машинам переменного тока. Принцип работы такого двигателя основан на использовании вращающегося магнитного поля, которое образуется в статоре после подключения его обмоток к трехфазной сети переменного тока (основная схема включения АД). Вращающееся магнитное поле статора, пересекая проводники обмотки ротора, индуцирует в них электродвижущую силу (ЭДС), создающую в обмотке ротора ток. Взаимодействие этого тока с вращающимся магнитным полем статора вызывает электромагнитный момент, приводящий ротор во вращение.
Для создания вращающегося магнитного поля статора необходимо выполнение двух условий, а именно: статорные обмотки должны быть смещены в пространстве друг относительно друга, что обычно обеспечивается конструкцией двигателя, и второе — токи в обмотках должны быть сдвинуты по фазе.
Известны решения, когда двух- или трехфазную обмотку статора включают в однофазную сеть переменного тока. В этом случае для создания начального (пускового) момента и приведения ротора во вращение используют фазосдвигающий элемент, преимущественно конденсатор, подключаемый к одной из обмоток статора, т.н. пусковой обмотке (например, см. кн. И.И.Алиев. Асинхронные двигатели в трехфазном и однофазном режимах. Изд-во: РадиоСофт, Москва, 2004 г., стр.83-87).
Для работы от сетей и источников постоянного тока обычно используют электродвигатели постоянного тока. Однако асинхронные двигатели более просты в обслуживании и надежны в эксплуатации, что объясняется отсутствием коллекторно-щеточного механизма, имеющего место в электродвигателях постоянного тока. Упомянутые качества делают привлекательным использование асинхронных двигателей в электроприводах с питанием от сетей постоянного тока.
Известен электропривод транспортного средства, содержащий асинхронный двигатель, подключенный к источнику постоянного напряжения через преобразователь постоянного напряжения в трехфазное напряжение с регулируемой амплитудой, частотой и изменяемым порядком чередования фаз (см. патент на полезную модель № 57990, МПК Н02К 17/34, опубл. 2006.10.27).
Известна схема подключения трехфазного асинхронного двигателя к источнику постоянного тока через трехфазный мостовой инвертор (см. патент SU № 1830178, МПК Н02Р 7/42, опубл. 23.07.93 г.).
Во всех известных заявителю решениях, в том числе вышеупомянутых, между асинхронным двигателем и источником постоянного тока непременно включается инвертор — преобразователь постоянного тока в m-фазный переменный либо коммутирующее вентильное устройство, поочередно подключающее фазы двигателя к источнику постоянной ЭДС. Однако все упомянутые схемы отличаются сложностью, наличием большого количества коммутирующих элементов, что отрицательно сказывается на надежности его работы.
В качестве ближайшего аналога для заявляемого решения принята схема включения асинхронного двигателя, примененная в приводе электроподвижного состава с питанием от тяговой сети (см. патент на полезную модель № 39763, МПК Н02Р 1/26, опубл. 2004.08.10). Схема содержит источник постоянного тока и соединенный с ним асинхронный двигатель с трехфазной обмоткой статора. Соединение АД с источником питания в упомянутом решении осуществлено через входные фильтры, однофазные инверторы, понижающие трансформаторы, мостовой выпрямитель с LC-фильтром и трехфазный коммутатор напряжения, к которому подключены статорные обмотки асинхронного двигателя. Трехфазный коммутатор напряжения выполнен на базе 6-ти электронных ключей. Недостатком известного решения является сложность схемы подключения, наличие большого числа коммутирующих элементов.
Раскрытие изобретения
Задачей заявляемого изобретения является разработка более простой схемы подключения асинхронного двигателя к источнику постоянного тока, использующей минимальное количество коммутирующих элементов.
Поставленная задача решена тем, что в схеме подключения многофазного асинхронного двигателя к источнику постоянного тока согласно заявляемому изобретению для каждой обмотки статора асинхронного двигателя сформирован параллельный резонансный LC-контур, образованный конденсатором и первичной обмоткой двухобмоточного дросселя, ко вторичной обмотке которого, индуктивно связанной с первой, подключена соответствующая обмотка двигателя, первичные обмотки дросселей контуров последовательно подключены к источнику постоянного тока через управляемый ключ, размыкающий цепь с заданной периодичностью, при этом каждый резонансный контур с включенной в него обмоткой двигателя настроен на собственную резонансную частоту с соблюдением условия последовательного изменения (возрастания или убывания) значения резонансной частоты от контура к контуру.
В отличие от прототипа и других известных решений, в заявляемом решении предложена принципиально новая схема питания асинхронного двигателя от источника постоянного тока, предполагающая последовательное подключение статорных обмоток двигателя к источнику постоянного тока с использованием одного ключа, размыкающего и замыкающего цепь с заданной периодичностью.
Для включения каждой обмотки двигателя использован обычный параллельный LC-контур, настроенный на собственную резонансную частоту. Собственная резонансная частота контуров и «разбег частот» между контурами во многом определяются конструктивным исполнением двигателя. Настройка контура на заданную частоту обеспечивается подбором номиналов индуктивности и емкости контура.
В качестве резонансных индуктивностей в заявляемой схеме использованы первичные обмотки двухобмоточных дросселей, которые обеспечивают накопление энергии с последующей отдачей ее в цепь без каких-либо преобразований. Ко вторичным обмоткам упомянутых дросселей в качестве нагрузки подключены соответствующие обмотки двигателя.
В замкнутом положении ключа в последовательной цепи через первичные обмотки дросселей протекает постоянный ток, происходит процесс насыщения резонансных индуктивностей и накопление энергии в магнитопроводах дросселей. В момент размыкания цепи на каждой резонансной индуктивности возникает импульс самоиндукции, и они начинают отдавать накопленную энергию через конденсатор. В каждом резонансном контуре возникает колебательный процесс, и в цепи контура начинает протекать переменный ток. Благодаря тому, что каждый контур настроен на индивидуальную резонансную частоту, возникшие в контурах токи изменяются с разной частотой, в результате чего между контурами образуется сдвиг фаз.
Переменный ток в первичных обмотках дросселей наводит переменный магнитный поток и переменную ЭДС во вторичных обмотках, в результате чего во вторичной цепи каждого контура возникает переменный ток, аналогичный протекающему в первичной обмотке. Через статорные обмотки, подключенные ко вторичным обмоткам дросселей в качестве нагрузки, также начинает протекать сдвинутый по фазе переменный ток. Таким образом, обеспечивается выполнение 2-го условия возникновения вращающегося магнитного поля: пропускание через обмотки асинхронного двигателя переменного тока, сдвинутого по фазе. Первое условие, как упоминалось выше, обеспечивается конструкцией двигателя, т.е. расположением статорных обмоток со смещением в пространстве. Выполнение обоих условий приводит к созданию в статоре асинхронного двигателя вращающегося магнитного поля, возникает вращающий момент, приводящий ротор двигателя во вращение.
Сдвиг фаз между контурами определяется значениями резонансных частот контуров и разбегом частот между ними. Следует отметить, что сдвиг фаз между токами контуров не имеет постоянной величины и увеличивается с течением времени, что объясняется затухающим характером колебательного процесса в контуре.
После затухания колебаний ключ замыкает цепь, и в контурах снова происходит накопление энергии. Процесс размыкания цепи и возникновение колебательных процессов повторяется периодически. По сути, в обмотках двигателя создается пульсирующее вращающееся магнитное поле, обеспечивающее раскрутку и вращение ротора.
Изменением периода времени, когда цепь разомкнута, можно влиять на скорость вращения двигателя.
Благодаря подключению статорных обмоток ко вторичным обмоткам дросселей практически полностью исключается прохождение через обмотки двигателя постоянной составляющей тока, вызывающей торможение ротора.
Таким образом, упомянутая выше совокупность существенных признаков заявляемого решения позволяет получить новый положительный технический результат, заключающийся в создании в обмотках асинхронного двигателя пульсирующих, т.е. периодически возникающих после размыкания цепи, переменных токов, сдвинутых по фазе друг относительно друга. Пока цепь замкнута, в последовательной цепи контуров течет постоянный ток, после размыкания цепи накопленная в контурах энергия преобразуется в переменный m-фазный (по числу фаз двигателя) ток.
Такое решение позволило исключить из схемы питания двигателя инвертор как самостоятельное устройство. В схеме использован всего один ключ на все фазы двигателя, что значительно упрощает схему питания, повышает надежность ее работы.
В известных решениях с автономными инверторами преобразованный из постоянного переменный m-фазный ток, имеющий фиксированный (неизменный) сдвиг между фазами, постоянно подается на обмотки двигателя. В заявляемом решении переменный ток проходит через обмотки двигателя периодически (импульсами) в период времени, когда цепь разомкнута, причем сдвиг между фазами — величина непостоянная.
В отличие от вентильного подключения, основанного на поочередном подключении обмоток асинхронного двигателя к питающей сети, в заявляемом решении подключение и отключение всех обмоток двигателя от сети питания осуществляется одновременно.
Предлагаемая схема подключения асинхронного двигателя к источнику постоянного тока может быть применена к любому многофазному двигателю: двух-, трех-, четырехфазному и т.д. Причем схема обеспечивает преобразование постоянного тока в переменный m-фазный, т.е. разделение тока происходит на столько фаз, сколько фаз имеет конкретный двигатель.
Краткое описание чертежей
Заявляемое решение поясняется чертежами, где
на фиг.1 изображена схема устройства, общий вид;
на фиг.2 показаны временные графические зависимости тока на фазах двигателя.
Осуществление изобретения
Схема была реализована для подключения стандартного асинхронного двигателя, заводского изготовления, с 3-фазной статорной обмоткой LA LB LC.
Схема подключения АД, представленная на фиг.1, содержит последовательную цепь из m (по числу обмоток двигателя, в конкретном примере — трех) резонансных параллельных контуров, каждый из которых образован конденсатором С и первичной обмоткой дросселя D, ко вторичной обмотке которого подключена соответствующая обмотка двигателя. Первичные обмотки (L1, L2, L3 ) дросселей последовательно подключены к источнику постоянного тока через управляемый ключ К. Ключ может быть реализован на базе транзистора, коммутируемого блоком управления. В простейшем случае в качестве такого блока можно использовать независимый генератор частоты.
Каждый резонансный LC-контур настроен на свою частоту, определяемую параметрами емкости и индуктивности контура по формуле: =1/ LC.
Значения резонансных частот последовательно изменяются от контура к контуру вдоль цепи: A>B>C либо в обратном порядке: A<B<C. Направление изменения значений частот определяет направление вращения двигателя. Вращение двигателя осуществляется в направлении убывания частоты.
Схема работает следующим образом.
Ключ К замкнут. Под действием ЭДС источника в последовательно включенных индуктивностях контуров ток нарастает до определенного значения. Происходит процесс насыщения резонансных дросселей. До момента насыщения практически все питающее напряжение приложено к обмоткам. В момент насыщения происходит скачкообразный скачок (падение) напряжения, который может быть использован в качестве управляющего сигнала на размыкание цепи.
Ключ размыкают, при этом индуктивные выбросы тока резонансных дросселей L1, L2, и L3 приводят к возникновению в резонансных LC-контурах колебательных процессов.
Благодаря настройке контуров на разные частоты колебательный процесс в каждом контуре имеет собственную частоту, в результате чего токи изменяются с разной скоростью, что ведет к образованию между ними сдвига фаз.
Во вторых обмотках дросселей, индуктивно связанных с первыми, также наводятся переменные токи, и через обмотки статора L A, LB, и LC начинает протекать сдвинутый по фазе переменный ток.
Сдвиг фаз токов в обмотках статора, возникающий после размыкания цепи (момент T1 ), иллюстрирован на временной зависимости фиг.2. Ток i1 — соответствует току, протекающему через фазу А, токи i 2 и i3 соответствуют фазам В и С соответственно.
В статорных обмотках АД возникает вращающееся магнитное поле, индуцирующее в обмотке ротора ЭДС и обеспечивающее возникновение электромагнитного момента, приводящего ротор во вращение.
После затухания в контурах колебательных процессов электронный ключ К замыкает цепь. На графике этому моменту соответствует время Т2. Процесс накопления энергии повторяется.
Созданное в обмотках двигателя пульсирующее вращающееся магнитное поле обеспечивает вращение двигателя. Испытанный образец в течение нескольких секунд вышел на номинальную частоту вращения. Предлагаемое схемное решение отличается простотой реализации и экономичностью.
На базе предлагаемой схемы возможно изготовление электропривода вращательного и поступательного перемещения.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Схема подключения многофазного асинхронного двигателя к источнику постоянного тока, отличающаяся тем, что для каждой обмотки статора асинхронного двигателя сформирован параллельный резонансный LC-контур, образованный конденсатором и первичной обмоткой двухобмоточного дросселя, ко вторичной обмотке которого индуктивно связанной с первой подключена соответствующая обмотка двигателя, первичные обмотки дросселей контуров последовательно подключены к источнику постоянного тока через управляемый ключ, размыкающий цепь с заданной периодичностью, при этом каждый резонансный контур с включенной в него обмоткой настроен на собственную резонансную частоту с соблюдением условия последовательного изменения значения резонансной частоты от контура к контуру вдоль цепи.
Лекция 3.3.Регулирование скорости трехфазного асинхронного двигателя изменением частоты напряжения питания
Частотное управление. У трехфазных асинхронных двигателей наиболее перспективным способом плавного регулирования является изменение частоты напряжения питания f (cм.(3.7)).При этом следует иметь в виду, что для наилучшего использования двигателя изменение частоты должно сопровождаться изменением амплитуды напряжения питания U. Объясняется это тем, что при неизменной амплитуде напряжения и регулировании частоты изменяется магнитный поток машины Фм=U/(4,44fw1.эф). Уменьшение f вызовет увеличение Фм, что может привести к насыщению магнитопровода, резкому возрастанию намагничивающего тока и перегреву как стали, так и обмоток статора. Увеличе¬ние f приводит к уменьшению Фм, что при Мст=const вызовет рост тока в роторе и, соответственно, перегрев ротора при недоиспользовании стали.
Закон изменения напряжения зависит от изменения частоты питания и характера нагрузки. Например, если статический момент нагрузки Мстне зависит от скорости, то необходимо при регулировании частоты f так изменять напряжение U, чтобы
U /f = const. (3.8)
При этом в широком диапазоне сохраняется перегрузочная способность двигателя Мmax / Мном.
Частотный способ позволяет устанавливать угловую скорость выше и ниже номинальной. Увеличение угловой скорости допускается (в основном из условий механической прочности) в 1,5-2 раза больше номинальной. Нижний предел скорости ограничен тем, что технически сложно получить источники питания с низкой частотой, а также добиться достаточно равномерного вращения ротора двигателя. В разомкнутом приводе частотный способ управления позволяет изменять угловую скорость в диапазоне D = (20 — 30):1; в замкнутом приводе диапазон может быть существенно расширен с помощью обратных связей по скорости, току и напряжению.
Препятствием для широкого внедрения частотного способа является сложность и весьма высокая стоимость полупроводниковых преобразователей частоты. Схема и алгоритмы управления таким приводом получаются более сложными, чем приводом посто¬янного тока, так как управлять приходится сразу двумя взаимосвязанными величинами: частотой напряжения и магнитным потоком — при существенно нелинейных характеристиках.
Однако асинхронные двигатели с короткозамкнутым ротором благодаря отсутствию скользящего контакта являются более надежными и требуют меньше ухода в эксплуатации, чем коллекторные двигатели постоянного тока. При одинаковой мощности их стоимость в несколько раз меньше. Поэтому создание регулируемых асинхронных приводов с частотным управлением в целом ряде случаев является перспективным.
Система «Преобразователь частоты – трехфазный асинхронный двигатель»(ПЧ–АД).Силовые преобразователи частоты и амплитуды напряжения для частотного управления асинхронными двигателями выполняются в настоящее время на силовых полупроводниковых элементах. Преобразователи частоты можно разделить на две основные группы: преобразователи с промежуточным звеном постоянного тока и преобразователи с непосредственной связью первичной и вторичной цепей.
Широкое распространение получили преобразователи с промежуточным звеном постоянного тока (рис.3.6). В рассматриваемых преобразователях переменное напряжение питающей сети выпрямляется, фильтруется и подается на управляемый инвертор, который преобразует постоянное напряжение в переменное с регулируемой частотой. Выпрямители преобразователей в свою очередь могут быть управляемые и неуправляемые.
В преобразователе частоты (ПЧ) с управляемым выпрямителем УВ (рис. 3.6,а) напряжение U1~, подаваемое на двигатель АД, регулируется по амплитуде за счет изменения напряжения постоянного тока U? на выходе УВ. Управляемый выпрямитель преобразователей частоты по схеме и принципу действия не отличается от УВ, применяемых в электроприводе постоянного тока (см. Лекция 2.2).Управление работой выпрямителя и управляемого инвертора УИ осуществляет блок управления БУ.

Рисунок 3.6
Принцип действия управляемого инвертора рассмотрим на примере инвертора, выполненного по трехфазной мостовой схеме и работающего на чисто активную нагрузку (рис. 3.7,а). В управляемом инверторе силовыми элементами должны быть полностью управляемые полупроводниковые приборы, т.е. способные открываться и закрываться под воздействием соответствующих сигналов управления. Этому требованию отвечают либо транзисторы, работающие в ключевом режиме, либо тиристоры в совокупности со схемой искусственной коммутации (см. Лекция 2.3), либо запираемые тиристоры. В общем виде эти силовые элементы обозначены на рисунке как ключи К1-К6. На вход УИ подано напряжение постоянного тока U, переключение в схеме происходит по команде блока управления каждую часть периода требуемой выходной частоты. При этом каждый ключ замкнут либо периода выходной частоты, либо периода. На рис. 3.7,б в качестве примера показаны временные диаграммы формирования выходного напряжения в фазах А, В, С сопротивления нагрузки Rн для первого случая.
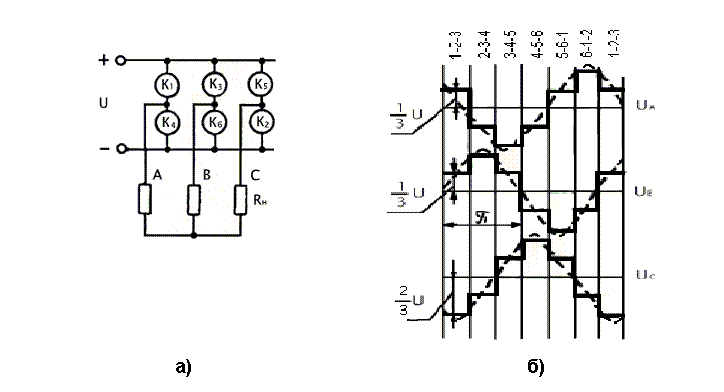
Рисунок 3.7
Как видно, на каждом такте коммутации схемы одновременно проводят ток три ключа (во втором случае – два ключа). Например, на первом такте открыты ключи с номерами 1, 2, 3 и ток протекает по цепи, в которой последовательно с сопротивлением фазы С включены параллельно соединенные сопротивления фаз А и В. При этом в фазе С падает приложенного напряжения U, в фазах А и В – по U. Знак падения напряжения определяется направлением тока в фазе. За положительное падение напряжения принято такое, которое создается током, протекающим к общей точке фаз нагрузки. По мере переключения ключей напряжение в фазах ступенчато изменяется и на нагрузке формируется симметричная трехфазная система напряжений прямоугольно-ступенчатой формы. Первые гармоники этих напряжений требуемой частоты (пунктирные линии на рис. 3.6,б) имеют фазовый сдвиг 120°. Высшие гармоники могут быть отфильтрованы LC-фильтрами. Частота выходного напряжения определяется частотой коммутации ключей, порядок следования напряжений – порядком коммутации ключей.
При активной нагрузке, показанной на рис. 3.7,а, по закону изменения напряжения будут изменяться и токи. Однако обмотки статора асинхронного двигателя являются для инвертора активно-индуктивной нагрузкой и закон изменения выходного тока инвертора не будет совпадать с законом изменения напряжения. Это обстоятельство предъявляет определенные требования к схемам инверторов.
В преобразователе частоты с неуправляемым выпрямителем НВ (рис.3.6,б) выпрямленное напряжение преобразуется с помощью транзисторного широтно-импульсного модулятора (ШИМ) в импульсное напряжение на входе инвертора, частота импульсов должна быть значительно больше верхнего предела рабочей частоты на выходе инвертора.
При обычной широтно-импульсной модуляции каждый силовой ключ инвертора (рис.3.7,а) включается и отключается не один раз за такт формируемого выходного напряжения (рис.3.7,б), а несколько. Среднее значение напряжения на такте в режиме непрерывного тока (см.Лекция 2.3) примерно равно ε – относительной продолжительности импульсов ШИМ. Изменяя ε , можно регулировать значение напряжения U1~ на выходе инвертора. Способ близок по обеспечению синусоидальной формы выходного напряжения к системе УВ – АД ,но лучше него по энергетическим характеристикам во всем диапазоне регулирования частоты и напряжения.
Более перспективным является синусный способ широтно-импульсного регулирования, который заключается в том, что длительность открытого состояния силовых ключей не остается постоянной в течение полупериода выходной частоты, а изменяется по синусоидальному закону. Если при этом частота переключения силовых ключей существенно выше выходной частоты инвертора, то в выходном напряжении кроме основной гармоники присутствуют лишь гармоники весьма высокого порядка, которые отфильтровываются индуктивностями обмоток самого двигателя.
Блок управления преобразователем частоты состоит из схемы управления выпрямителем, схемы управления инвертором и схемы совместного управления. Блок управления позволяет получать требуемые характеристики асинхронного электропривода при частотном управлении. Наиболее типичными законами автоматического управления являются:
1. Частотное управление, при котором изменение частоты сопровождается нелинейным изменением напряжения статора; в схеме управления требуется применение функционального преобразователя координат;
2. Частотно-токовое управление, при котором изменение частоты сопровождается нелинейным изменением тока статора; в схеме управления требуется применение функционального преобразователя координат;
3. Векторное управление, основанное на непосредственном контроле значения и положения магнитного потока в воздушном зазоре машины или положения ротора, а также мгновенных значений токов статора; в схеме управления требуется целый ряд блоков векторного преобразования координат.
3.12. Динамические свойства асинхронного электромеханического преобразователя при питании от источника напряжения
Математическое описание динамических процессов преобразования энергии в § 3.10 было получено в предположении, что двигатель получает питание от сети или от индивидуального преобразователя, обладающего свойствами источника напряжения, т. е. источника, напряжение которого при изменении тока нагрузки остается неизменным. Проведем с его помощью анализ динамических свойств асинхронного преобразователя, рассматривая его как объект управления. Как было показано, для реализации управления моментом и скоростью двигателя в широких пределах при благоприятных условиях необходимо изменять частоту подведенного напряжения, воздействуя на скорость поля и амплитуду напряжения, определяющую при данной частоте магнитный поток двигателя.
Анализ динамических процессов преобразования энергии в асинхронном двигателе представляет собой сложную задачу в связи с существенной нелинейностью уравнений (3.64) и (3.68), обусловленной наличием произведений переменных. Исследование динамических процессов при широких пределах изменения скорости целесообразно вести с применением вычислительной техники. Для этих целей удобную форму математического описания дает (3.68), если решить каждое уравнение относительно производной потокосцепления и записать:
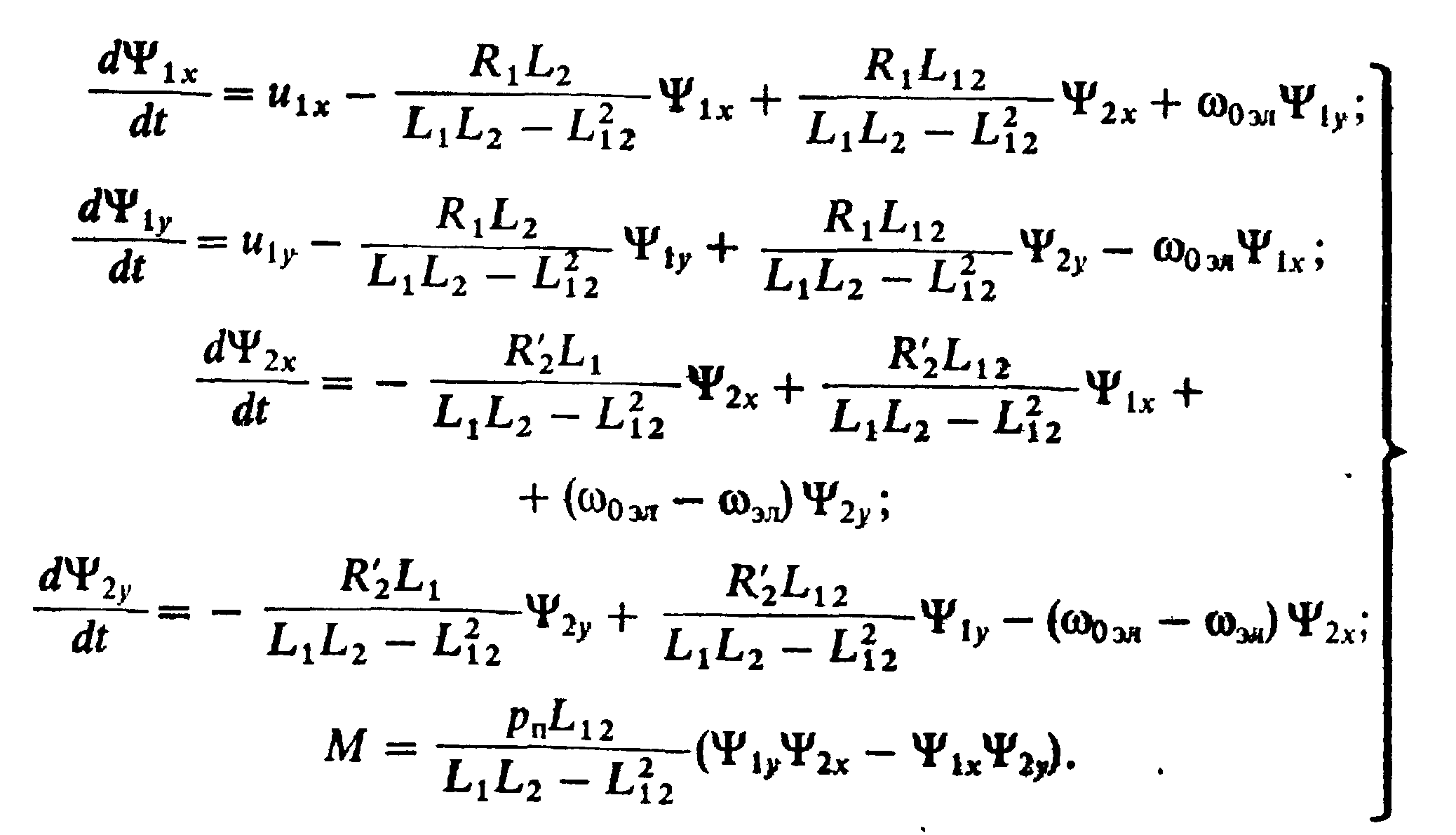 (3.86)
(3.86)
Структурная схема электромеханического преобразования энергии в асинхронном двигателе при питании от источника напряжения представлена на рис. 3.36. Рассматривая ее, можно видеть два управляющих воздействия: ω0эл., и 1,определяющих при данной скорости ротора ωизменения электромагнитного момента двигателя М. Для обеспечения определенных условий протекания процессов между изменениями ω0эл, и1 должна устанавливаться взаимосвязь, которую называют законами частотного управления.
Аналитические оценки динамических свойств асинхронного электромеханического преобразователя могут быть получены для режимов малых отклонений скорости от статического значения путем разложения (3.86) в ряд Тэйлора. В частности, таким путем устанавливаются динамические свойства преобразователя в области рабочего участка механической характеристики S<SKв режимах, когда магнитный поток машины изменяется незначительно.
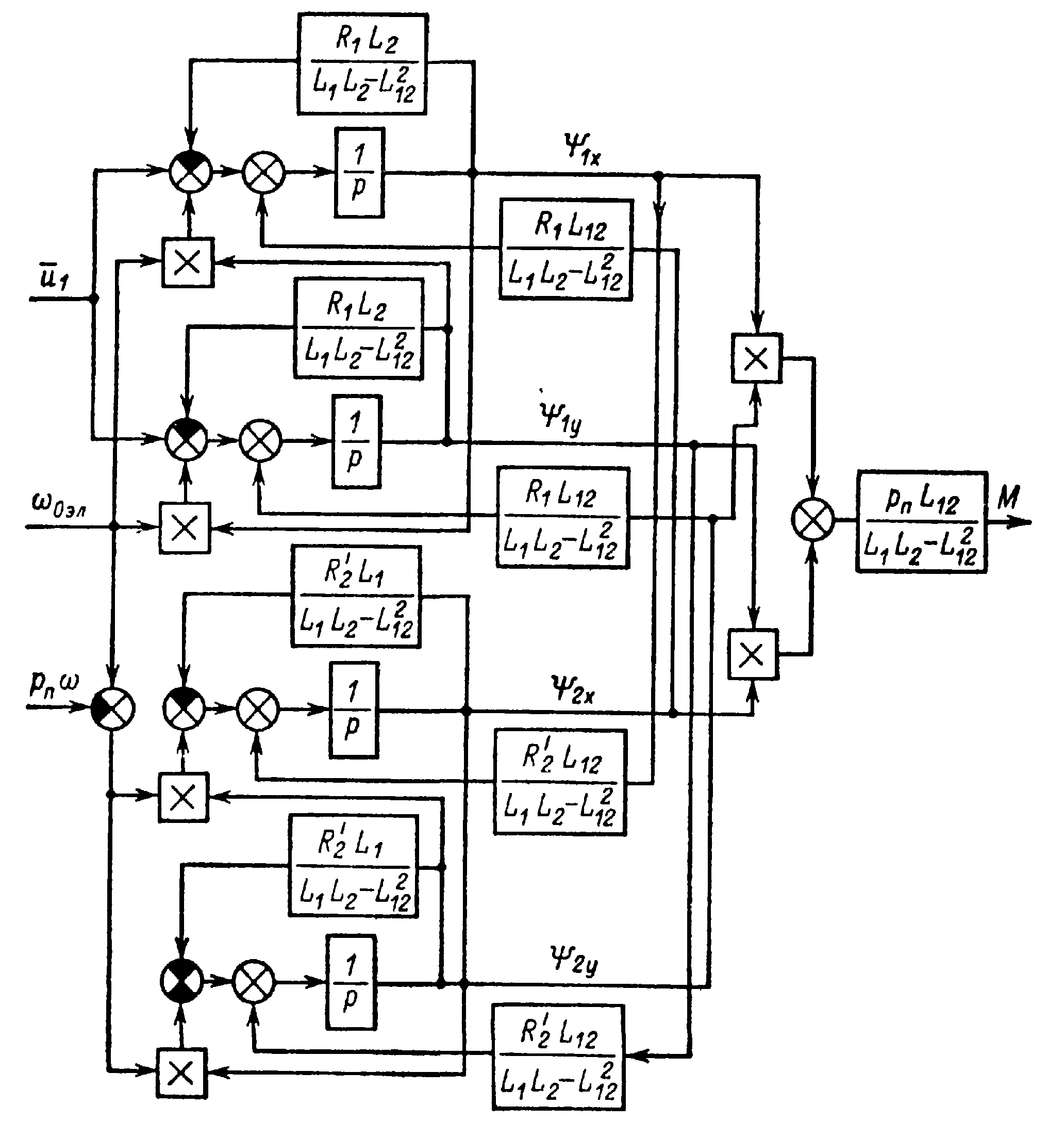
Рис. 3.36. Структурная схема электромеханического преобразования энергии в асинхронном двигателе
Здесь рассматривается динамический режим работы двигателя, имеющий место по истечении времени после подключения к источнику переменного напряжения, достаточного для затухания свободных составляющих, обусловленных переходным процессом включения. При этом предполагается, что отклонения скорости от значения, определяемого статической характеристикой, малы, а изменения токов не вызывают существенных изменений потокосцепления статора Ψ ι.
Для этих условий, положив d/dt=0, с помощью (3.64) можно определить потокосцепление статора по формуле
 (3.87)
(3.87)
Следовательно, при питании от источника напряжения при неизменной частоте ω0эл=constизменения 1вызываются только изменениями падения напряжения на активном сопротивлении статораR1.Если принятьR1≈0, то при неизменной частоте постоянство 1обеспечивает постоянство пото-косцепления в широких пределах изменения скорости. При изменениях частоты f1иR1≈0 для поддержания постоянным 1достаточно изменять напряжение пропорционально частоте:
(3.88)
Соотношение (3.88) определяет закон частотного управления U1/f1=const.
Пусть к обмоткам статора обобщенной машины приложена система синусоидальных напряжений, которым соответствует изображающий вектор 1совпадающий по направлению с осью х, т.е. в осяхх, у

Тогда в соответствии с (3.88)

Таким образом, для рассматриваемых условий процессы электромеханического преобразования в асинхронном двигателе описываются тремя последними уравнениями системы (3.86).
Выполним вспомогательные преобразования:
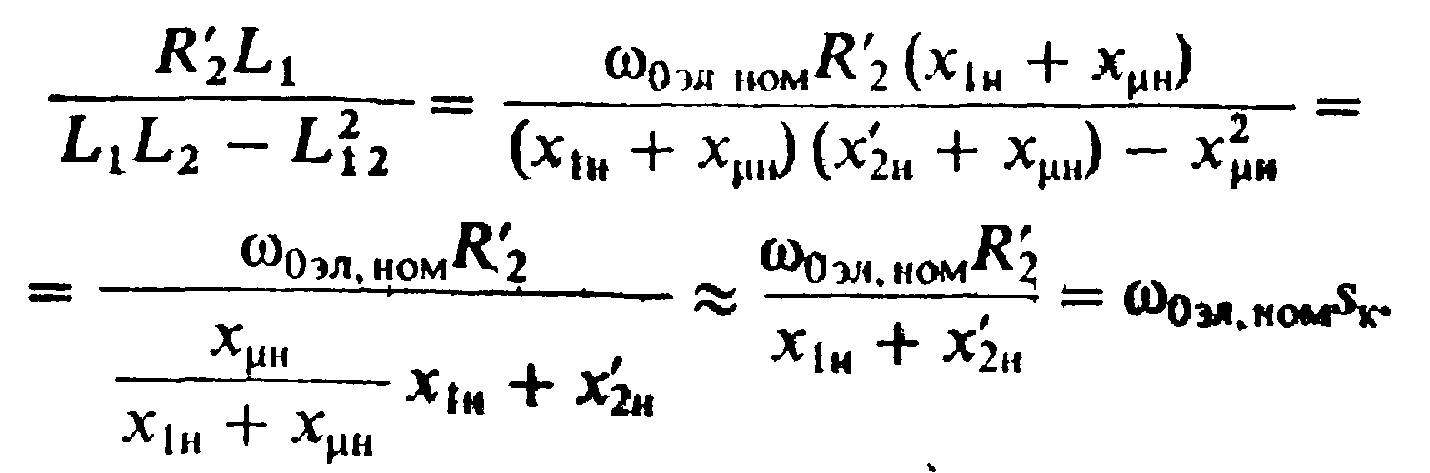
Здесь индексом «н» обозначено, что индуктивные сопротивления Χ1Н,Χ2Н,Χ3Нсоответствуют номинальной частоте сети ω0эл.ном; учтено, что при Хμн>X1H;Sк определено из (3.77) приR1=0. С учетом полученных значений Ψ1Xи Ψ1Yу и последнего соотношения три указанных уравнения системы (3.86) запишутся в виде
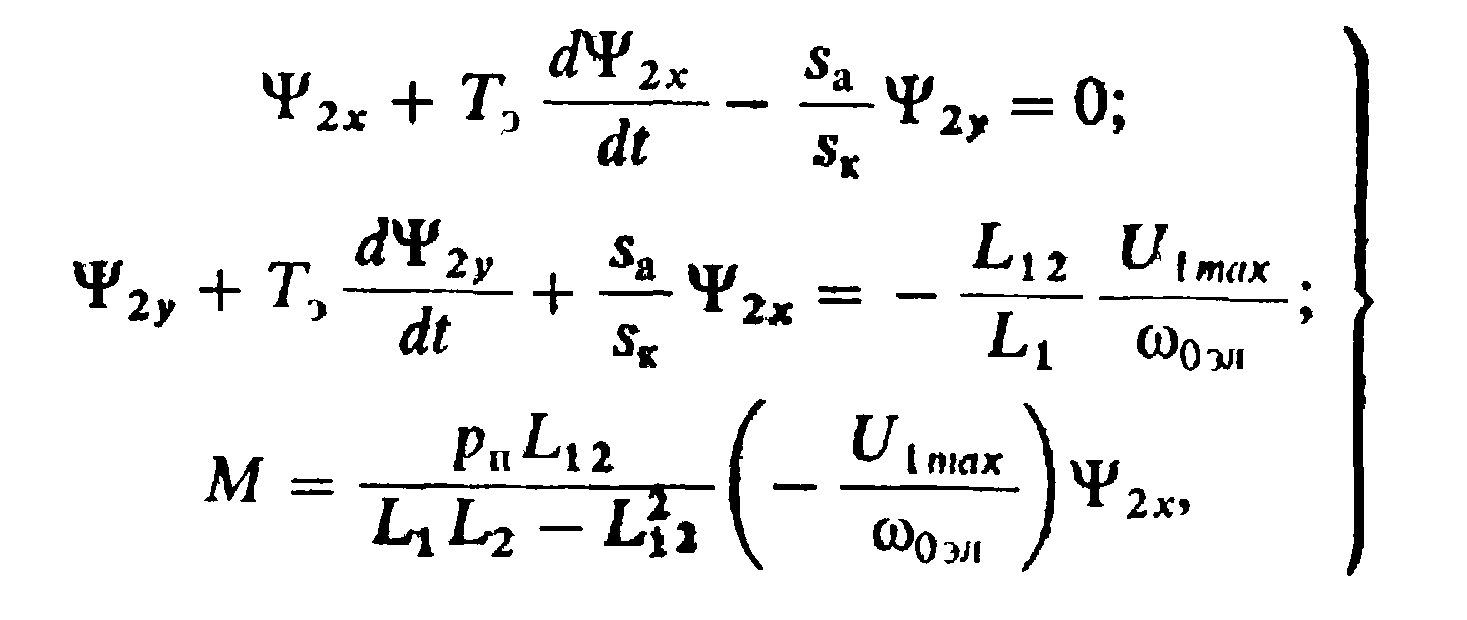 (3.89)
(3.89)
здесь  — электромагнитная постоянная времени;
— электромагнитная постоянная времени;
 —
абсолютное скольжение, равное
отношению отклонения скорости двигателя
ωот скорости поля ω0при любой частоте f1к скорости поляω0номпри частотеf1ном.
—
абсолютное скольжение, равное
отношению отклонения скорости двигателя
ωот скорости поля ω0при любой частоте f1к скорости поляω0номпри частотеf1ном.
Положим d/dt=ρи произведем преобразования алгебраизированных уравнений (3.89), имея в виду, что эти уравнения нелинейны и поэтому допустимы только такие их преобразования, при которых строго сохраняется предусмотренный исходными уравнениями порядок дифференцирования переменных. С этой целью вначале из первого уравнения определимΨ2Y:
 (3.90)
(3.90)
Подставив (3.90) во второе уравнение системы (3.89) с соблюдением получающегося порядка дифференцирования переменных, получим
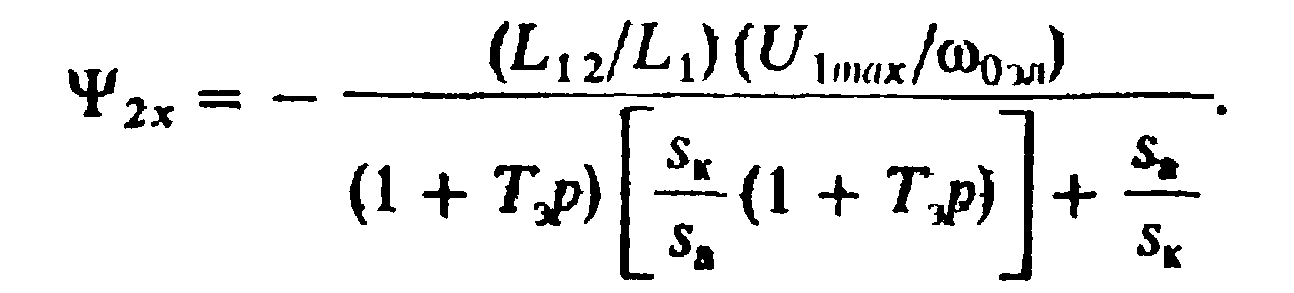 (3.91)
(3.91)
Подстановка (3.91) в третье уравнение системы (3.89) дает искомое выражение механической характеристики:
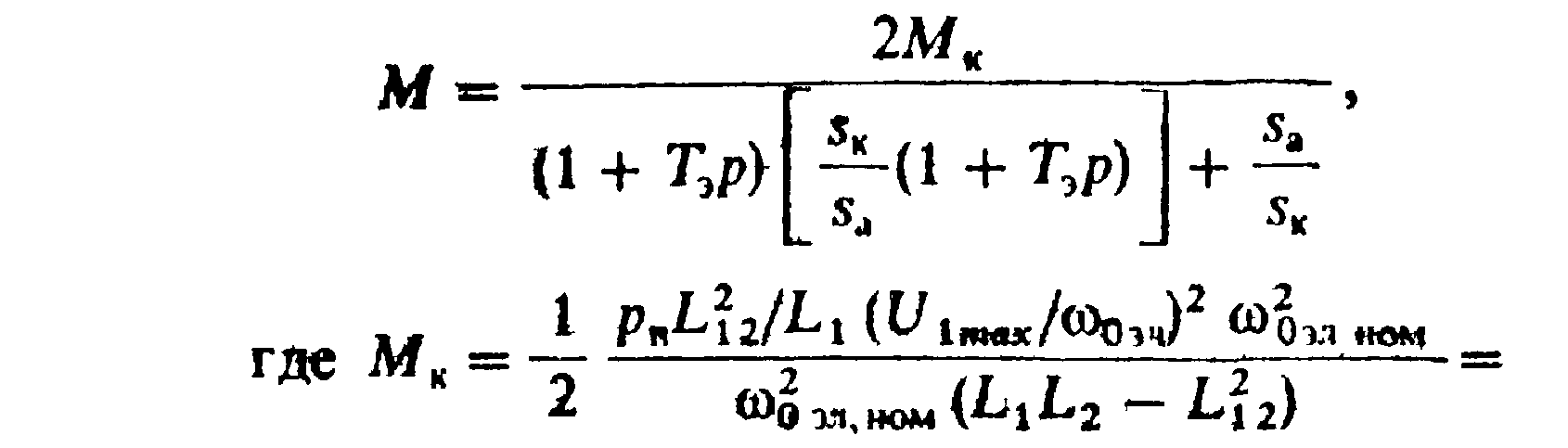 (3.92)
(3.92)

В последней записи критического момента МКпроизведен переход от максимального напряженияU1MAXдвухфазной модели двигателя к реальному действующему значению напряжения на фазе трехфазного двигателя U1.По формуле (2.37)

Кроме того, учтено, что хμН>х1Ни хμН>> х`2Н.Нетрудно убедиться, что полученное значение МКсовпадает с определяемым по (3.78) приR1=0и ω0= ω0ном. Таким образом, полученное приближенное уравнение механической характеристики в качестве частного случая статического режима работы (р = 0) дает уравнение статической механической характеристики (3.79) приR1≈0. Однако оно выражено в функции абсолютного скольженияsa:
 (3.93)
(3.93)
поэтому не только приближенно описывает естественную характеристику двигателя (ω0=ω0ном) но и определяет искусственные механические характеристики двигателя, соответствующие различной частоте питающего напряженияf1при изменении напряжения по закону U1/f1=const. Как следует из (3.93) и выражения МКв (3.92), при R1=0механические характеристики инвариантны относительно абсолютного скольженияsa и представляются зависимостями ω=f(M), показанными для различных частот пунктирными кривыми на рис. 3.37. Реально в (3.87) можно пренебрегатьR1только при частотах, близких к номинальной, при этомU1=U1ном>>I1·R1. При снижении частоты и напряжения по законуU1/f1=const, как показывает (3.87), потокосцепление Ψ ιдолжно снижаться, стремясь к 0 приf1→0. Соответственно с учетомR1≠0 реальные механические характеристики при таком законе управления имеют снижающийся при малых частотах критический момент (см. сплошное кривые на рис. 3.37). По этой причине в реальных системах используются более сложные законы частотного управления, рассматриваемые в гл. 6.
Уравнение механической характеристики (3.92) отражает влияние электромагнитной инерции на протекание динамических процессов электромеханического преобразования энергии при ограниченных по амплитуде колебаниях в окрестностях точек статической характеристики. Для анализа этого влияния осуществим линеаризацию этого уравнения. Вначале необходимо выполнить операции дифференцирования в последовательности, полученной при выводе (3.92):

После дифференцирования получим

Раскладываем полученное уравнение в ряд Тэйлора в окрестности точки М°, sa°,пренебрегая членами высшего порядка малости. После преобразований уравнение механической характеристики представляется в виде
 (3.94)
(3.94)
Уравнение (3.94) позволяет анализировать модуль статической жесткости линеаризованной механической характеристики и влияние электромагнитной инерции при линеаризации в любой точке статической механической характеристики M°=f(sa°). Наибольший интерес представляет линеаризованное уравнение механической характеристики для рабочего участкаsа<sк. Такое уравнение получим с помощью (3.94), положив S°a=0, ΔSа=Sа-Sa=Sа=(ω0— ω)/ωном; ΔΜ= Μ-Μ° =Μ:

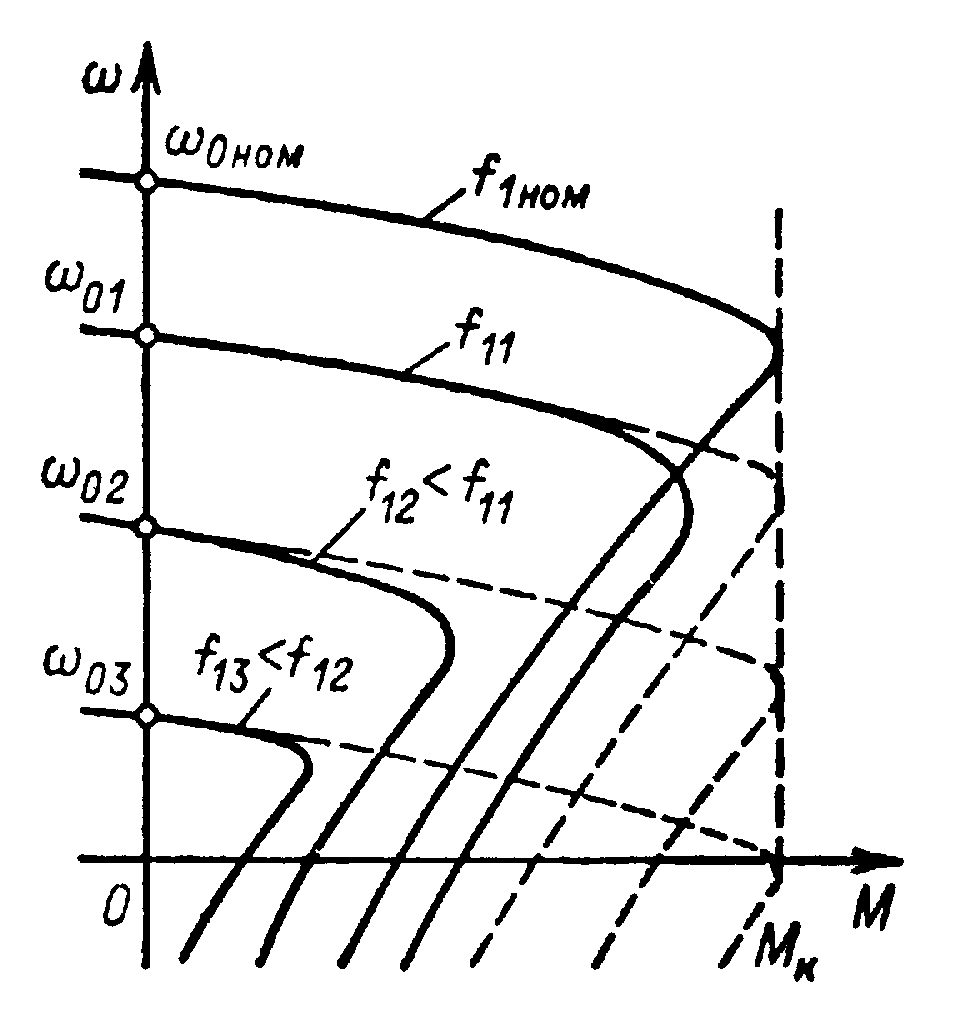
Рис. 3.37. Механические характеристики асинхронного двигателя при питании от источника напряжения при f1=var

Рис. 3.38. Структурная схема линеаризованного асинхронного электромеханического преобразователя
Следовательно, в окрестности точки М°=0, S°a=0 электромеханический преобразователь представляется звеном первого порядка, так как его уравнение механической характеристики имеет вид
 (3.95)
(3.95)
где β= 2МК/ω0номSк— модуль жесткости линеаризованной механической характеристики.
Структурная схема асинхронного электромеханического преобразователя, линеаризованного в пределах рабочего участка статической механической характеристики, представлена на рис. 3.38.
Передаточная функция динамической жесткости в соответствии с этой схемой запишется так:
 (3.96)
(3.96)
Сравнивая (3.95) и (3.96) с аналогичными формулами для двигателя постоянного тока с независимым возбуждением, можно заключить, что в пределах рабочего участка асинхронный двигатель имеет динамические свойства, аналогичные динамическим свойствам двигателя с независимым возбуждением.
Так как критическое скольжение двигателей лежит в пределах Sк=0,05÷0,5, причем меньшие значения соответствуют мощным двигателям, электромагнитная постоянная двигателя ТЭпри питании от источника напряжения невелика:

меньшие значения соответствуют двигателям малой мощности.
3.13. Статические характеристики и динамические свойства асинхронного электромеханического преобразователя при питании от источника тока
В связи с развитием регулируемого асинхронного электропривода с частотным управлением значительный практический интерес представляет изучение свойств асинхронного электромеханического преобразователя при питании от источника тока. Это обусловлено тем, что значительная часть используемых преобразователей частоты обладает свойствами источника тока, т. е. формирует в фазах двигателя токи, которые не зависят от режима работы и параметров двигателя, а определяются только сигналом задания. Схема включения двигателя для этого случая показана на рис. 3.39. В этой схеме двигатель получает питание от трехфазного источника тока. Значение тока определяется напряжением задания тока uз.т а частота — напряжениемuз.ч.
Следует заметить, что режимы работы, соответствующие питанию от источника тока, имеют место и в электроприводах, получающих питание от сети. Важным и широко используемым на практике примером является режим динамического торможения асинхронного двигателя при питании его обмотки статора постоянным током.
Так как в схеме рис. 3.39 обмотки статора питаются неизменным током, уравнения механической характеристики (3.64) запишутся в виде
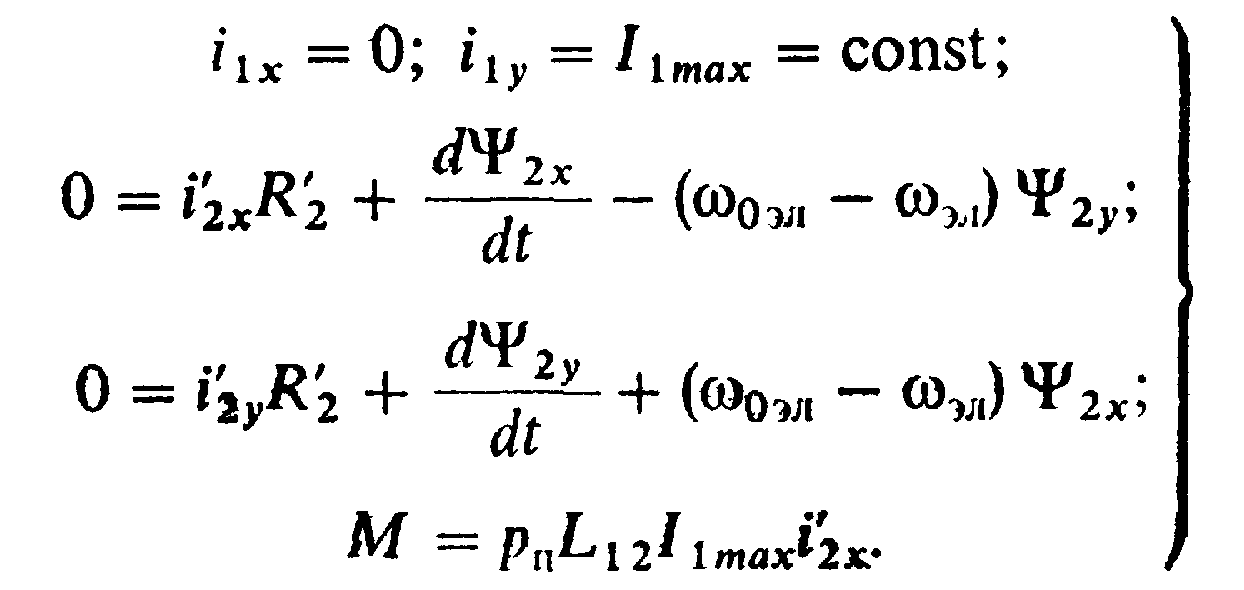 (3.97)
(3.97)
Потокосцепления в (3.97) могут быть выражены через токи:
 (3.98)
(3.98)
Подставив в уравнение для обмотки 2х выражения потокосцеплений (3.98), определим ток фазы 2у:
 (3.99)
(3.99)
где SK1=R`2/(xμН+x`2Н) — критическое скольжение в режиме питания от источника тока,
ТЭ1=L2/R`2=1/ω0эл.ном·Sк1— электромагнитная постоянная двигателя при питании от источника тока.
Система (3.97) нелинейна, поэтому при преобразованиях необходимо соблюдать условия, отмеченные в § 3.12. Подставим (3.99) в уравнение для обмотки 2у и с соблюдением указанных условий преобразований разрешим его относительно тока фазы 2x:
 (3.100)
(3.100)
Искомое уравнение механической характеристики асинхронного электромеханического преобразователя при питании от источника тока получим, подставив (3.100) в последнее уравнение системы (3.97):
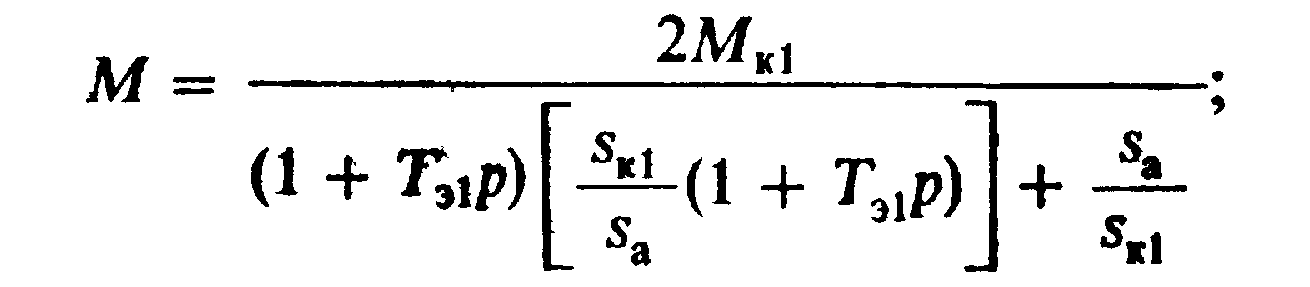 (3.101)
(3.101)
здесь МК1 —критический момент при питании от источника тока. В переменных двухфазной модели он получен в виде
 (3.102)
(3.102)
Уравнение критического момента для трехфазной машины получим, заменив максимальное значение тока двухфазной модели I1MAXдействующим значением тока фазы трехфазного двигателя I1с помощью формулы (2.37):

Выполнив эту замену в (3.102), получим
 (3.103)
(3.103)
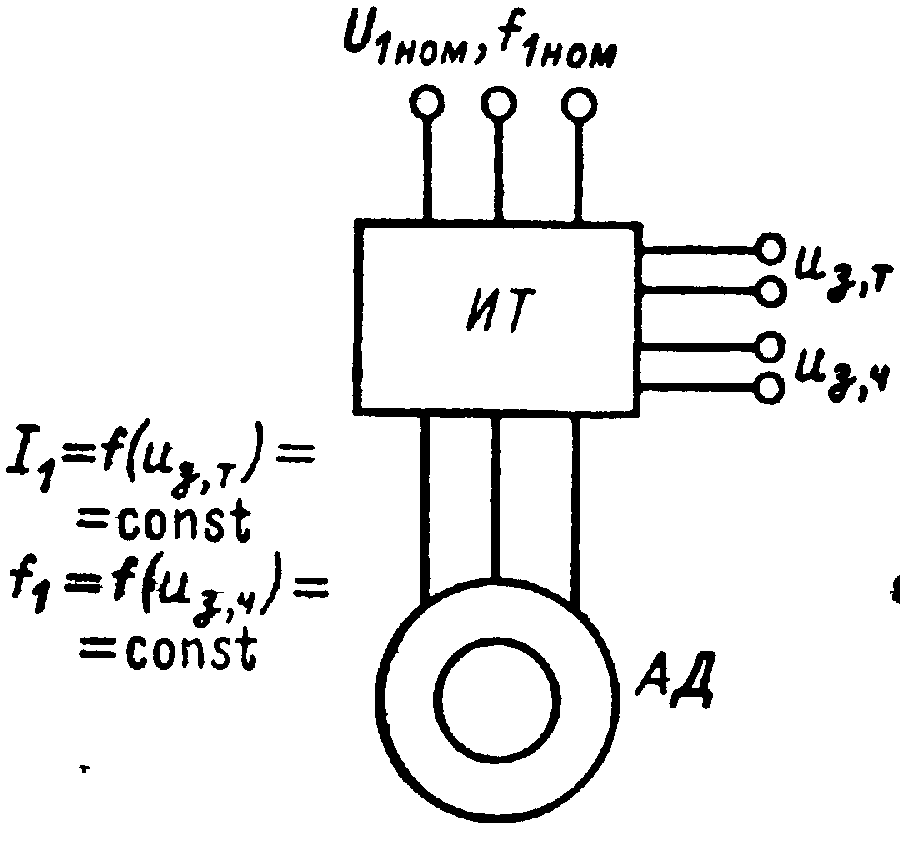
Рис.3.39. Схема питания асинхронного двигателя от источника тока
Проведем анализ статических характеристик для случая питания асинхронного двигателя от источника тока. Уравнения электрического равновесия (3.72) для этого режима принимают вид
 (3.104)
(3.104)
Схема замещения фазы двигателя при питании от источника тока, соответствующая (3.104), приведена на рис. 3.40, а, а векторная диаграмма для этого режима работы — на рис. 3.40, б. С помощью схемы замещения получим выражения для тока ротора I`2и намагничивающего тока Ιμ:
 (3.105)
(3.105)
 (3.106)
(3.106)
Уравнения (3.105) и (3.106) получены по схеме замещения (рис. 3.40, а) с помощью известного правила определения тока параллельной ветви по общему току. ЗависимостиI`2=f(sа) иIμ=f(Sа), соответствующие этим выражениям, приведены на рис. 3.41, а. Они свидетельствуют о том, что при увеличении скольжения ток ротораI`2монотонно возрастает, стремясь к предельному значению
 (3.107)
(3.107)
В то же время намагничивающий ток, который при Sa=0 равен току I1,с увеличением тока ротора непрерывно уменьшается, стремясь к значению
 (3.108)
(3.108)
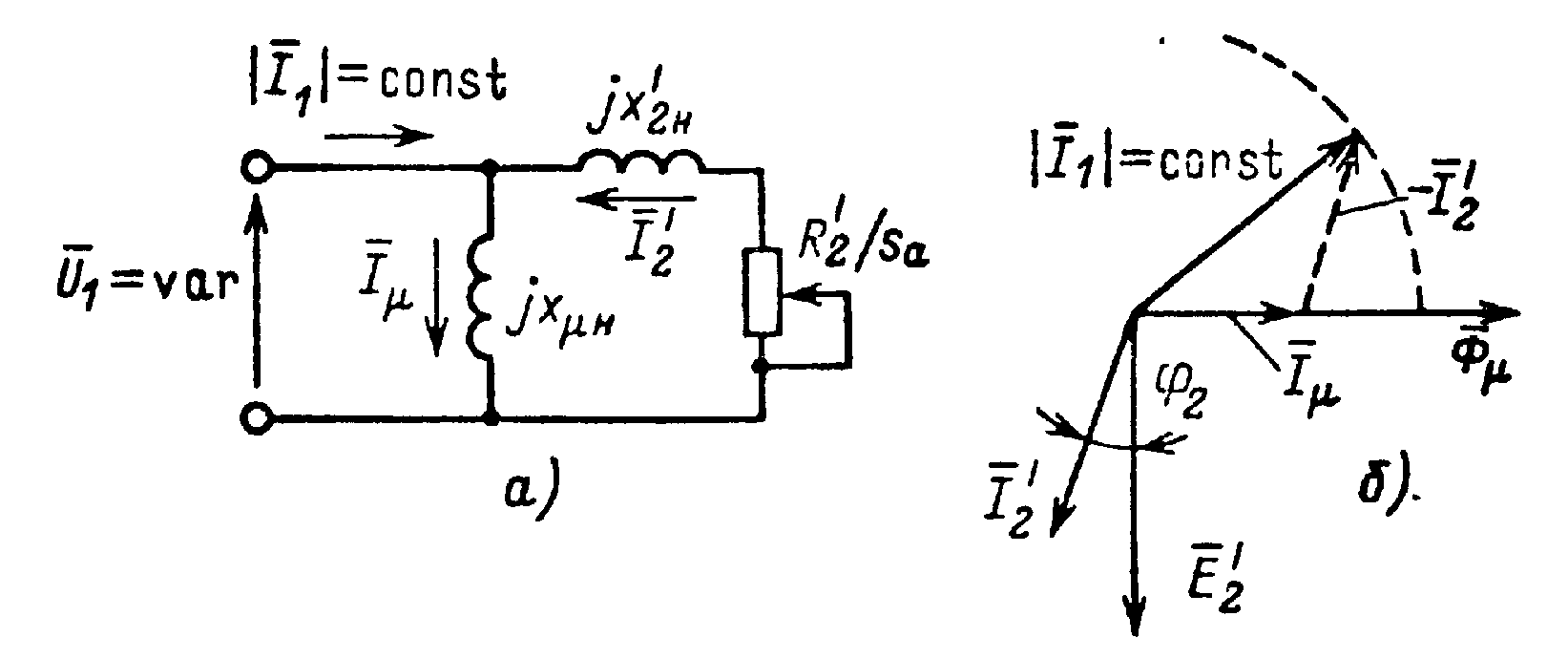
Рис. 3.40. Схема замещения фазы (а)и векторная диаграмма(б)для режима питания, асинхронного двигателя от источника тока
Так как x`2н<< xμн, токIμ.предвесьма мал. Отсюда следует важный вывод, что при питании от источника тока вследствие размагничивающего действия тока ротора ток Iμи магнитный поток машины Φμизменяются при изменениях скольженияsа, в широких пределах.
Установленная закономерность является важным отличием режима питания от источника тока от режима питания от источника напряжения. В последнем случае в соответствии со схемой замещения на рис. 3.27, априU1=constнамагничивающий ток примерно постоянен, так как изменяется только в связи с изменениями падения напряжения на сопротивлениях статора, которые невелики. При этом размагничивающее действие тока ротора компенсируется соответствующими изменениями тока статора (см. рис. 3.30,б). В режиме питания от источника токаI1=constи размагничивающее действие тока ротора проявляется полностью.
Как следствие, при анализе характеристик асинхронного двигателя в режиме питания от источника тока необходимо учитывать влияние насыщения магнитной цепи двигателя. Кривая намагничивания представлена на рис. 3.41,б, там же построена кривая Χμ=f(Iμ),соответствующая данной кривой намагничивания. Для анализа формы статических характеристик с приближенным учетом насыщения характеристикаΦμ=f(Iμ)аппроксимирована двумя прямыми. При Iμ<IμНАС магнитная цепь машины ненасыщена и Χμ=XμН=const (прямая 1).Если Iμ>IμНАСнасыщение сказывается существенно и приближенно можно принять Φμ=ΦμНАС=const (прямая 2 на рис. 3.41, б).
Так как Iμ I1,то приI1 Iμ.насмагнитная цепь двигателя при любых скольжениях не насыщается и ΧμН=const.
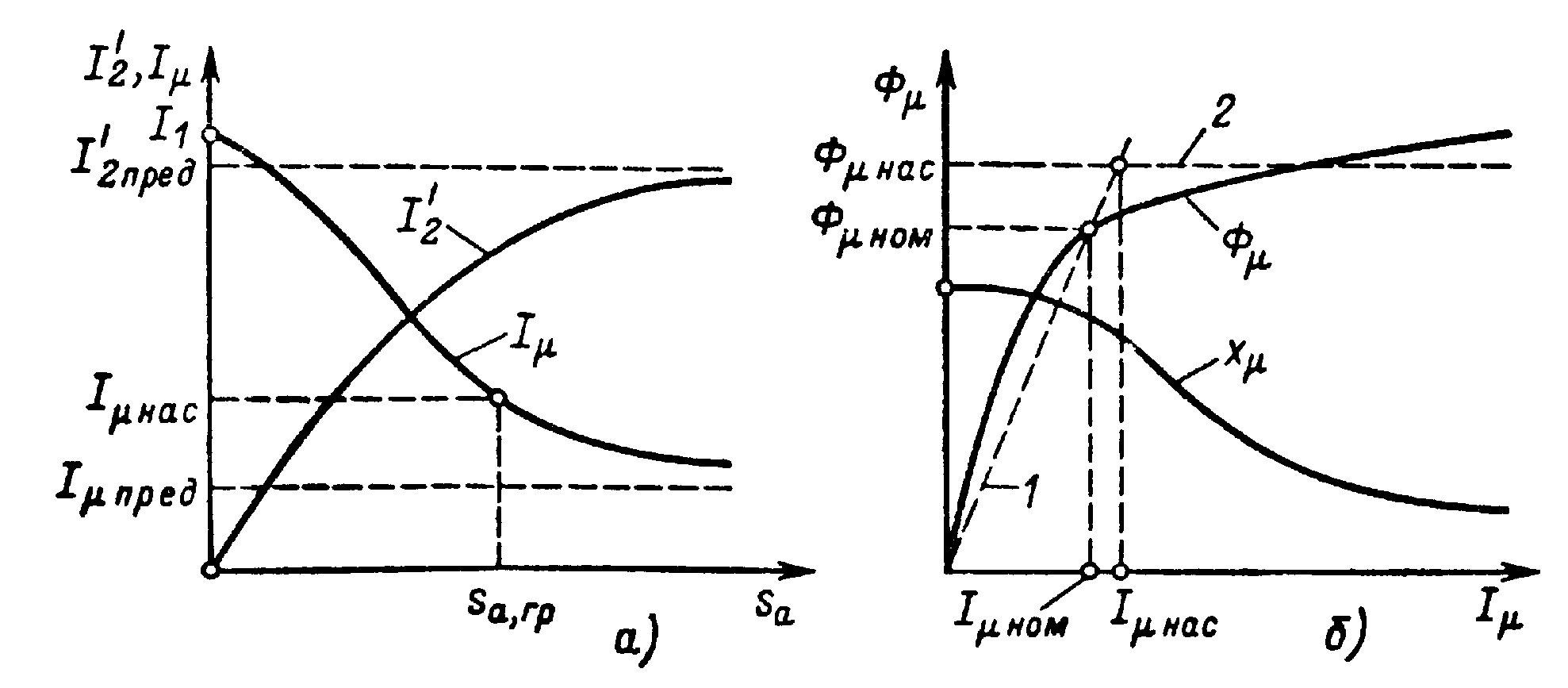
Рис.3.41. ЗависимостиI`2,Iμ(Sa) и Φμ(Iμ)для режима питания асинхронного двигателя от источника тока
В этой области значений I1, статические механические характеристики двигателя описываются уравнением (3.101) при р=0:
 (3.109)
(3.109)
где 
На рис 3.42, а представлено семейство
характеристик ω=f(М),
соответствующих ряду значений частотыf1при I1IμНАС.
Так как зависимостьM=f(Sa)
(3.109) инвариантна относительно частоты,
то при измененииf1изменяется только скорость идеального
холостого хода ω0=2πf1/ρП,а форма механических характеристик
относительно этой точки не претерпевает
изменений. Особенностью этих характеристик
является малость критического
скольженияSК1по
сравнению сSK соответствующим питанию от источника
напряжения, обусловленная тем, что  .
Однако при
.
Однако при  невелико и значение МК1.Поэтому для получения требуемой
перегрузочной способности, аналогичной
перегрузочной способности на естественной
характеристике, в режиме питания от
источника тока необходимо выбирать
значения I1,превышающиеIμНАСв несколько раз.
невелико и значение МК1.Поэтому для получения требуемой
перегрузочной способности, аналогичной
перегрузочной способности на естественной
характеристике, в режиме питания от
источника тока необходимо выбирать
значения I1,превышающиеIμНАСв несколько раз.
При I1>>IμНАС,и идеальном холостом ходе магнитная цепь машины находится в глубоком насыщении, поэтому при малых значенияхSaможно без большой погрешности принять Φμ=ФμНАС=const. С ростом скольжения намагничивающий токIμуменьшается, однако в соответствии с принятой аппроксимацией до значенияSa=Sa.гр, при котором Iμ=IμНАСнасыщение сохраняется. В области больших скольжений (Sa>Sа.гр), как показано на рис. 3.41, а, ток Iμ < Iμ.нас, Xμвозрастает и приближенно может быть принято равным Xμн (рис 341, б).
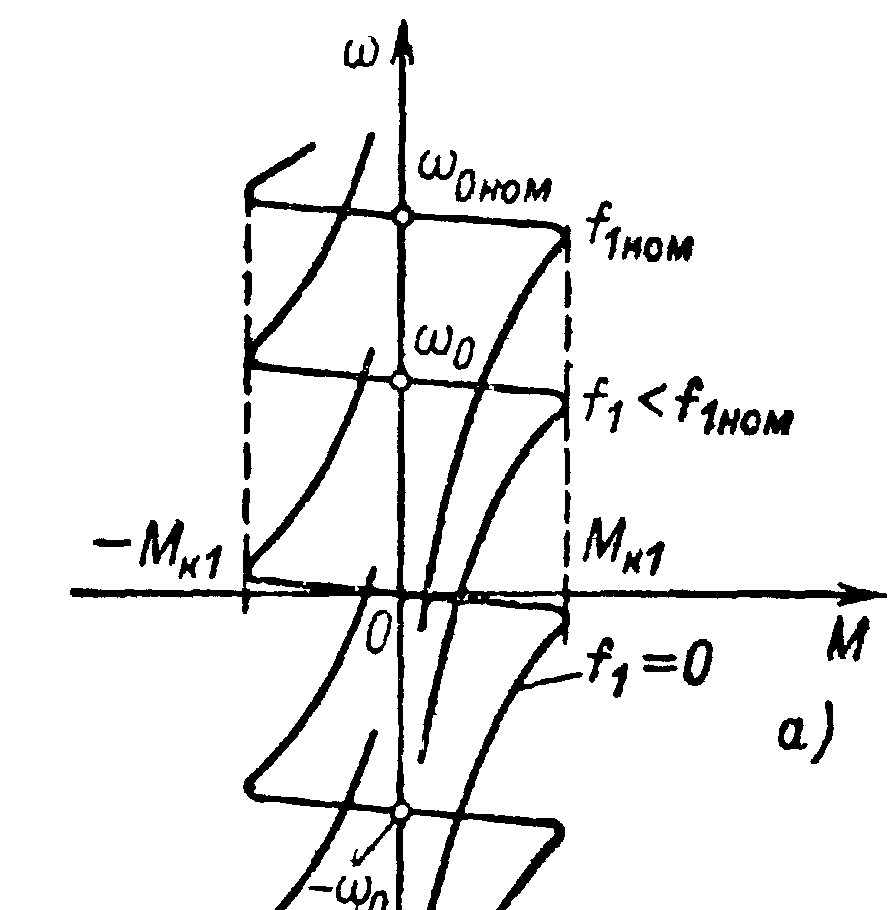
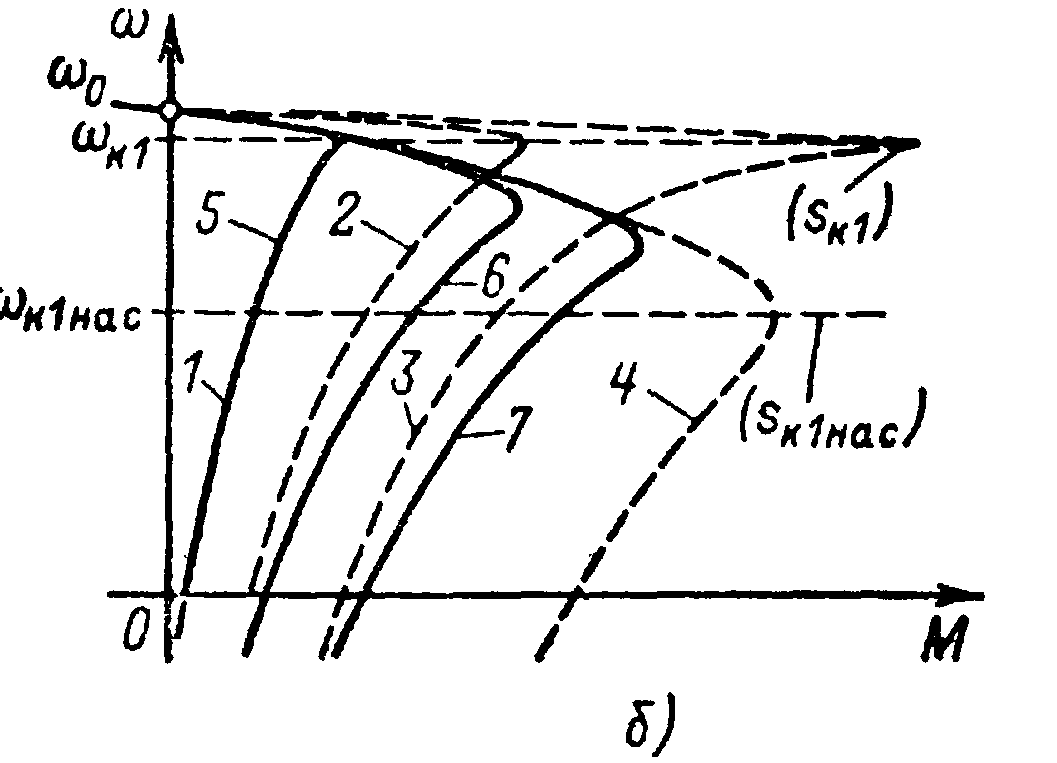
Рис. 3.42 Механические характеристики асинхронного двигателя при питании от источника тока
Отсюда следует, что при I1>>Iнасв областиSa<Sа.грреальная форма кривой ω=f(Μ)в значительной мере отклоняется от определяемой (3.109), а при больших скольжениях (Sа>Sa.гр) магнитная цепь размагничивается током ротора и реальная механическая характеристика сближается с рассчитываемой по (3.109).
Принятая аппроксимация кривой намагничивания позволяет приближенно оценить вид механической характеристики при насыщении, которое соответствует области малых скольжений, т, е. рабочему ее участку. При насыщении Фμ=Фμнас=constи ЭДСE`2 достигает значений, близких кU1НОМ. Сучетом этого для режима насыщения можно принять Е`2=U1НОМ=const и представить (3.109) в виде
 (3.110)
(3.110)
где 
Следовательно, насыщение смещает максимум момента в область больших скольжений, так как SК1.НАС>SK1.
Проведенный анализ влияния насыщения позволяет представить реальную форму механических характеристик при различных значениях I1.На рис. 3.42, б приведены механические характеристики 1-3, соответствующие токамI11=Iμ.нас,I12 >>Iμ.нас иI13>I12которые построены по (3.109) без учета насыщения. Там же показана механическая характеристика4 для насыщенного состояния магнитной цепи, определяемая (3.110). Реальные механические характеристики (кривые 5—7) в области насыщения (Sa<Sа.rp) совпадают с кривой4,а при отсутствии насыщения (Sa>Sа.rp) приближаются к соответствующим кривым1—3.
Граничное скольжение Sa.rpприIг=I11равно нулю и с возрастанием тока I1увеличивается. Соответственно приI11=Iμ.нас магнитная цепь машины не насыщается при любых скольжениях и кривая 1 сливается с соответствующей реальной характеристикой 5. С увеличением I1и возрастаниемSа.гр увеличивается зона, где механические характеристики совпадают с кривой4,а зона, в которой они совпадают с рассчитываемыми без учета насыщения, постепенно сокращается. Это, как видно на рис. 3.42, б, приводит к постепенному увеличению критического скольжения.
Сравнивая уравнение механической характеристики для динамических процессов (3.101) с уравнением (3.92), соответствующим питанию двигателя от источника напряжения, можно установить, что они совпадают по форме и отличаются лишь выражениями критического момента и электромагнитной постоянной времени. Следовательно, выполнив линеаризацию уравнения (3.101) в окрестности точки М°=0, Sа=0 аналогично линеаризации, выполненной для уравнения (3.92), получим приближенное линеаризованное уравнение механической характеристики в виде
 (3.111)
(3.111)
где
Передаточная функция динамической жесткости
 (3.111 а)
(3.111 а)
Структурная схема электромеханического преобразования энергии при питании от источника тока в соответствии с (3.111) совпадает с полученной выше схемой для питания от источника напряжения и приведенной на рис. 3.38. Однако динамические свойства в этих режимах существенно различны в связи с тем, что при питании от источника тока поток при I1=constизменяется в широких пределах. Изменения главного потока машины при этом определяют существенно большую инерционность электромеханического преобразователя, чем при питании от источника напряжения. Действительно, сравнивая
можно убедиться, что ТЭ<< ТЭ1. С ростом тока статора вследствие насыщения индуктивное сопротивление намагничиванияΧμн уменьшается, при этом уменьшается и электромагнитная постоянная ΤЭ1,стремясь при больших насыщениях к ТЭ.
В отличие от питания от источника напряжения при питании от источника тока можно изменять частоту, не изменяя сигнала задания тока. Однако практически и в этом случае для обеспечения определенных условий протекания процессов электромеханического преобразования энергии задание тока в схеме рис. 3.39 изменяют в функции задания частоты по тем или иным законам частотного управления.