


Какие бывают двигатели? Типы электродвигателей. Асинхронные двигатели
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.
Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.
Двухфазный двигатель — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 8 апреля 2014; проверки требуют 13 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 8 апреля 2014; проверки требуют 13 правок.Двухфа́зный дви́гатель — электрический двигатель переменного тока с двумя обмотками, сдвинутыми в пространстве на 90°. При подаче на двигатель двухфазного тока, сдвинутого по фазе на 90°, образуется вращающееся магнитное поле. Короткозамкнутый ротор двигателя обычно изготавливается в виде «беличьего колеса». Обычно число стержней короткозамкнутого ротора не связано с числом пар полюсов статора, то есть при двух парах полюсов статора число стержней ротора может быть, например, 14 штук. Есть некие соображения, по которым число стержней ротора должно быть связано с числом полюсов ротора.
Асинхронный однофазный электродвигатель[править | править код]
Если прервать один из трех питающих проводов вращающегося асинхронного трехфазного электродвигателя, то при небольшой нагрузке он будет продолжать работу на одной фазе. В двигателе остается вращающееся поле. Однако при однофазном включении в состоянии покоя такой двигатель не будет работать даже без нагрузки. Если третью фазу обмотки подключить через конденсатор к одному из двух питающих проводов, то трёхфазный двигатель, подсоединенный к сети однофазного тока, начнет работать и его рабочие характеристики будут сходны с характеристиками обычного трехфазного асинхронного двигателя.
Асинхронный двухфазный электродвигатель[править | править код]
Двухфазные асинхронные двигатели:а — с короткозамкнутым ротором;
б — с полым ротором Схема подключения второй обмотки через резистор
Вращающиеся магнитные поля могут быть созданы и двухфазными обмотками, если эти обмотки пространственно смещены на 90° друг относительно друга. Если эти обмотки питать двумя токами, смещёнными на 90° по фазе, то получается, как и в трехфазном электродвигателе, вращающееся магнитное поле.
В двухфазном электродвигателе создается вращающий момент, обусловленный токами, вызванными вращающимся магнитным полем в стержнях ротора электродвигателя. Ротор получает ускорение до тех пор, пока он — как и в трёхфазном асинхронном двигателе — не достигнет определенной конечной частоты вращения, которая ниже частоты вращения поля.
Если обе обмотки статора питать от одной и той же сети однофазного тока, то сдвиг фазы в одной из обмоток, необходимый для получения вращающегося поля, может быть реализован последовательным включением конденсатора с достаточной емкостью[1]. На рисунке показана схема двухфазного асинхронного двигателя с конденсатором при питании от сети переменного тока.
Сдвиг фазы в одной из обмоток можно получить и последовательным включением резистора, но в этом случае увеличиваются потери активной мощности. Также сдвиг фазы получается, если взамен внешнего резистора на полюсе (или полюсах) одной из обмоток размещается короткозамкнутый виток. В этом случае увеличиваются потери активной мощности в соответствующей обмотке, зато исключается внешний резистор. Такие двигатели обычно имеют небольшую мощность и используются, например, в бытовых вентиляторах[2].
В настоящее время расширилась сфера применения двухфазного асинхронного двигателя в виде электродвигателя с полым ротором. В таком электродвигателе вместо обычного короткозамкнутого ротора применяется алюминиевый цилиндр, который может вращаться в воздушном зазоре между внешним и внутренним статорами.
Вращающееся поле вызывает в алюминиевом цилиндре вихревые токи, которые, взаимодействуя с магнитным полем в воздушном зазоре, создают вращающий момент. Цилиндр достигает конечной асинхронной частоты вращения, которая соответствует нагрузке на валу.
Небольшой момент инерции ротора электродвигателя обусловливает благоприятные рабочие характеристики. Электродвигатели с полым ротором рассчитаны прежде всего на небольшие мощности и применяются для автоматического регулирования в компенсационных и мостовых схемах. Одна из обмоток вместе с конденсатором подключается к сети с напряжением, а на вторую обмотку подается управляющее напряжение.
Серийные конденсаторные двухфазные двигатели[править | править код]
- КДП-2
- КДП-4
- КД-5
- КД-6-4 — лицензионный японский двигатель
к. т. н., профессор Шишкин В.П. Электрические микромашины (рус.) (недоступная ссылка) (2001). — Электрические микромашины автоматических устройств. Дата обращения 6 февраля 2009. Архивировано 25 февраля 2009 года.
Электродвигатель переменного тока | Техника и человек
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Преимущества четырёхполюсных бесколлекторных двигателей постоянного тока
Миниатюризация приводной техники — одна из главных тенденций современности. Очередной шаг в этом направлении совершила компания Faulhaber, разработавшая инновационный серводвигатель BX4. Использование ротора на базе четырёхполюсного магнита, позволяет ему развивать гораздо больший крутящий момент по сравнению с двигателями традиционной двухполюсной конструкции тех же габаритных размеров.
К моторам, используемым в сфере мехатроники и робототехники, предъявляется ряд особых требований. Они должны иметь хорошие динамические характеристики, малые габаритные размеры, высокую надежность, длительный срок службы, и, главное, большую удельную мощность при относительно малой номинальной (до 100-150 Вт). Подобные качества отличают бесколлекторные микродвигатели постоянного тока, имеющие и хорошие скоростные показатели, и высокий момент, и срок службы, превышающий 20000 часов. Компании-лидеры в области прецизионной приводной техники – Faulhaber, Maxon Motor, Precistep – традиционно выпускали двухполюсные бесколлекторные двигатели постоянного тока, имеющие сходные как моментно-скоростные, так и габаритные характеристики. Статор таких двигателей представлял собой трёхфазную обмотку, а ротор был выполнен на базе биполярного постоянного магнита (рис.1). Коммутация обмоток производилась в соответствии с сигналами, поступающими с датчиков Холла.
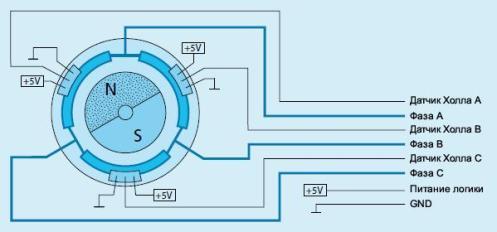
Рис.1. Схема бесколлекторного двигателя традиционной конструкции
В зависимости от исполнения использовались как аналоговые, так и цифровые датчики.
Faulhaber применила в BX4 ротор, выполненный на базе четырёхполюсного магнита (рис.2). Причем различные серии BX4 отличаются типами исполнения ротора: часть построена на базе неодимовых магнитов, скреплённых с помощью пластика, часть — на базе постоянных магнитов. Двигатели разных серий отличаются наклоном механической характеристики, и, соответственно, либо более скоростной, либо более моментной характеристикой.
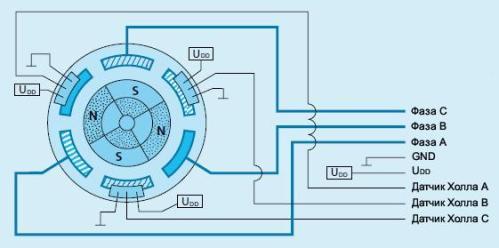
Рис. 2. Схема четырёхполюсного бесколлекторного двигателя
В конструкции BX4 применено ещё несколько инновационных решений: обмотки статора интегрированы с датчиками Холла, кроме того, часть обмотки выполнено заодно с фланцем подшипника качения вала. При этом в конструкции двигателя полностью отсутствуют клеевые соединения.
Изначально эти двигатели разрабатывались для использования в составе наиболее технологичной техники: мехатронных узлах в авиации, модульных компонентах, робототехнике и медицинских специальных устройствах.

Рис. 3. Семейство двигателей Faulhaber BX4
Сравнительный анализ бесколлекторных двигателей двухполюсной и четырёхполюсной конструкций показал, что при одинаковых габаритных размерах бесколлекторные двигатели, построенные по новой технологии, гораздо динамичнее.
В Таблице 1 приведены показатели двигателей инновационной серии BX4, традиционной двухполюсной продукции Faulhaber и некого абстрактного европейского производителя со сходными габаритными размерами и усреднёнными характеристиками.
Таблица 1. Сравнительный анализ двигателей
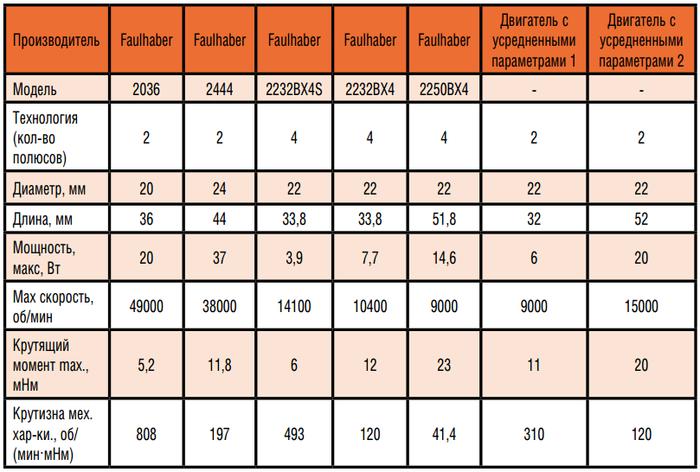
При улучшении динамических показателей ВХ4 удается сохранить и высокое значение крутящего момента без увеличения габаритов. В самом деле: двигатель серии 2232BX4S имеет меньшие габариты и лучшие сило-моментные показатели по сравнению с моделью 2036, двигатель серии 2232BX4 по всем параметрам превосходит модель 2444 и, тем более, усредненный бесколлекторный двигатель схожих габаритов.
Для наглядной оценки рассматриваемых двигателей рассмотрим график (рис. 4) зависимости крутящего момента двигателя от крутизны его механической характеристики. Выбор именно этих параметров не случаен. Крутизна характеризует динамичность работы двигателя, а максимальный момент выступает как мощностной показатель.
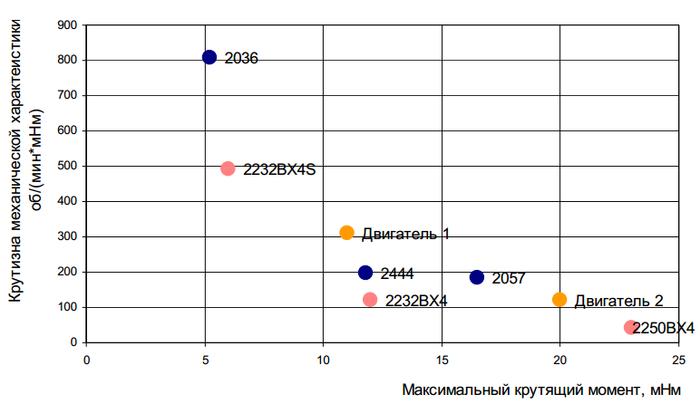
Рис. 4. График сравнения двигателей
Четырёхполюсная технология не требует усложнения процесса производства и серьёзной переоснастки оборудования, поэтому применение новой технологии не сказывается на конечной цене изделия.
Всё это делает использование двигателей, построенных по четырёхполюсной технологии крайне привлекательным в мехатронных узлах машин, прецизионных электромеханических устройствах, медицине и робототехнике.
Максим Сонных,
инженер ООО «Микропривод»
«Конструктор-машиностроитель, №3, 2009
Однофазный асинхронный электродвигатель
Дмитрий Левкин
Однофазный асинхронный электродвигатель — это асинхронный электродвигатель, который работает от электрической сети однофазного переменного тока без использования частотного преобразователя и который в основном режиме работы (после пуска) использует только одну обмотку (фазу) статора.Конструкция однофазного двигателя с вспомогательной или пусковой обмоткой
Основными компонентами любого электродвигателя являются ротор и статор. Ротор — вращающаяся часть электродвигателя, статор — неподвижная часть электродвигателя, с помощью которого создается магнитное поле для вращения ротора.
Основные части однофазного двигателя: ротор и статор
Статор имеет две обмотки, расположенные под углом 90° относительно друг друга. Основная обмотка называется главной (рабочей) и обычно занимает 2/3 пазов сердечника статора, другая обмотка называется вспомогательной (пусковой) и обычно занимает 1/3 пазов статора.
Двигатель фактически является двухфазным, но так как рабочей является только одна обмотка, электродвигатель называют однофазным.
Ротор обычно представляет из себя короткозамкнутую обмотку, также из-за схожести называемой «беличьей клеткой». Медные или алюминиевые стержни которого с торцов замкнуты кольцами, а пространство между стержнями чаще всего заливается сплавом алюминия. Так же ротор однофазного двигателя может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.

Однофазный двигатель с вспомогательной обмоткой имеет 2 обмотки расположенные перпендикулярно относительно друг друга
Принцип работы однофазного асинхронного двигателя
Для того чтобы лучше понять работу однофазного асинхронного двигателя, давайте рассмотрим его только с одним витком в главной и вспомогательной обмотки.

Проанализируем случай с двумя обмотками имеющими по оному витку
Рассмотрим случай когда в вспомогательной обмотки не течет ток. При включении главной обмотки статора в сеть, переменный ток, проходя по обмотке, создает пульсирующее магнитное поле, неподвижное в пространстве, но изменяющееся от +Фmах до -Фmах.
Запустить

Остановить

Пульсирующее магнитное поле
Если поместить ротор, имеющий начальное вращение, в пульсирующее магнитное поле, то он будет продолжать вращаться в том же направлении.
Чтобы понять принцип действия однофазного асинхронного двигателя разложим пульсирующее магнитное поле на два одинаковых круговых поля, имеющих амплитуду равную Фmах/2 и вращающихся в противоположные стороны с одинаковой частотой:
 ,
,
- где nпр – частота вращения магнитного поля в прямом направлении, об/мин,
- nобр – частота вращения магнитного поля в обратном направлении, об/мин,
- f1 – частота тока статора, Гц,
- p – количество пар полюсов,
- n1 – скорость вращения магнитного потока, об/мин
Запустить

Остановить

Разложение пульсирующего магнитного потока на два вращающихся
Действие пульсирующего поля на вращающийся ротор
Рассмотрим случай когда ротор, находящийся в пульсирующем магнитном потоке, имеет начальное вращение. Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Будем считать, что прямой магнитный поток Фпр, вращается в направлении вращения ротора, а обратный магнитный поток Фобр — в противоположном направлении. Так как, частота вращения ротора n2 меньше частоты вращения магнитного потока n1, скольжение ротора относительно потока Фпр будет:
 ,
,
- где sпр – скольжение ротора относительно прямого магнитного потока,
- n2 – частота вращения ротора, об/мин,
- s – скольжение асинхронного двигателя

Прямой и обратный вращающиеся магнитные потоки вместо пульсирующего магнитного потока
Магнитный поток Фобр вращается встречно ротору, частота вращения ротора n2 относительно этого потока отрицательна, а скольжение ротора относительно Фобр
 ,
,
- где sобр – скольжение ротора относительно обратного магнитного потока
Запустить

Остановить

Вращающееся магнитное поле пронизывающее ротор

Ток индуцируемый в роторе переменным магнитным полем
Согласно закону электромагнитной индукции прямой Фпр и обратный Фобр магнитные потоки, создаваемые обмоткой статора, наводят в обмотке ротора ЭДС, которые соответственно создают в короткозамкнутом роторе токи I2пр и I2обр. При этом частота тока в роторе пропорциональна скольжению, следовательно:
 ,
,
- где f2пр – частота тока I2пр наводимого прямым магнитным потоком, Гц
 ,
,
- где f2обр – частота тока I2обр наводимого обратным магнитным потоком, Гц
Таким образом, при вращающемся роторе, электрический ток I2обр, наводимый обратным магнитным полем в обмотке ротора, имеет частоту f2обр, намного превышающую частоту f2пр тока ротора I2пр, наведенного прямым полем.
Пример: для однофазного асинхронного двигателя, работающего от сети с частотой f1 = 50 Гц при n1 = 1500 и n2 = 1440 об/мин,скольжение ротора относительно прямого магнитного потока sпр = 0,04;
частота тока наводимого прямым магнитным потоком f2пр = 2 Гц;
скольжение ротора относительно обратного магнитного потока sобр = 1,96;
частота тока наводимого обратным магнитным потоком f2обр = 98 Гц

Согласно закону Ампера, в результате взаимодействия электрического тока I2пр с магнитным полем Фпр возникает вращающий момент
 ,
,
- где Mпр – магнитный момент создаваемый прямым магнитным потоком, Н∙м,
- сM — постоянный коэффициент, определяемый конструкцией двигателя
Электрический ток I2обр, взаимодействуя с магнитным полем Фобр, создает тормозящий момент Мобр, направленный против вращения ротора, то есть встречно моменту Мпр:
 ,
,
- где Mобр – магнитный момент создаваемый обратным магнитным потоком, Н∙м
Результирующий вращающий момент, действующий на ротор однофазного асинхронного двигателя,
 ,
,
Справка: В следствие того, что во вращающемся роторе прямым и обратным магнитным полем будет наводиться ток разной частоты, моменты сил действующие на ротор в разных направлениях будут не равны. Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Тормозящее действие обратного поля
При работе однофазного двигателя в пределах номинальной нагрузки, то есть при небольших значениях скольжения s = sпр, крутящий момент создается в основном за счет момента Мпр. Тормозящее действие момента обратного поля Мобр — незначительно. Это связано с тем, что частота f2обр много больше частоты f2пр, следовательно, индуктивное сопротивление рассеяния обмотки ротора х2обр = x2sобр току I2обр намного больше его активного сопротивления. Поэтому ток I2обр, имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Фобр, значительно ослабляя его.
 ,
,
- где r2 — активное сопротивление стержней ротора, Ом,
- x2обр — реактивное сопротивление стержней ротора, Ом.
Если учесть, что коэффициент мощности невелик, то станет, ясно, почему Мобр в режиме нагрузки двигателя не оказывает значительного тормозящего действия на ротор однофазного двигателя.

С помощью одной фазы нельзя запустить ротор

Ротор имеющий начальное вращение будет продолжать вращаться в поле создаваемом однофазным статором
Действие пульсирующего поля на неподвижный ротор
При неподвижном роторе (n2 = 0) скольжение sпр = sобр = 1 и Мпр = Мобр, поэтому начальный пусковой момент однофазного асинхронного двигателя Мп = 0. Для создания пускового момента необходимо привести ротор во вращение в ту или иную сторону. Тогда s ≠ 1, нарушается равенство моментов Мпр и Мобр и результирующий электромагнитный момент приобретает некоторое значение  .
.
Пуск однофазного двигателя. Как создать начальное вращение?
Одним из способов создания пускового момента в однофазном асинхронном двигателе, является расположение вспомогательной (пусковой) обмотки B, смещенной в пространстве относительно главной (рабочей) обмотки A на угол 90 электрических градусов. Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, пусковую обмотку В отключают. Отключение вспомогательной обмотки происходит либо автоматически с помощью центробежного выключателя, реле времени, токового или дифференциального реле, или же вручную с помощью кнопки.
Таким образом, во время пуска двигатель работает как двухфазный, а по окончании пуска — как однофазный.
Подключение однофазного двигателя
С пусковым сопротивлением
Двигатель с расщепленной фазой — однофазный асинхронный двигатель, имеющий на статоре вспомогательную первичную обмотку, смещенную относительно основной, и короткозамкнутый ротор [2].
Однофазный асинхронный двигатель с пусковым сопротивлением — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки отличается повышенным активным сопротивлением.

Омический сдвиг фаз, биффилярный способ намотки пусковой обмотки

Разное сопротивление и индуктивность обмоток
Для запуска однофазного двигателя можно использовать пусковой резистор, который последовательно подключается к пусковой обмотки. В этом случае можно добиться сдвига фаз в 30° между токами главной и вспомогательной обмотки, которого вполне достаточно для пуска двигателя. В двигателе с пусковым сопротивлением разность фаз объясняется разным комплексным сопротивлением цепей.
Также сдвиг фаз можно создать за счет использования пусковой обмотки с меньшей индуктивностью и более высоким сопротивлением. Для этого пусковая обмотка делается с меньшим количеством витков и с использованием более тонкого провода чем в главной обмотке.
Отечественной промышленностью изготавливается серия однофазных асинхронных электродвигателей с активным сопротивлением в качестве фазосдвигающего элемента серии АОЛБ мощностью от 18 до 600 Вт при синхронной частоте вращения 3000 и 1500 об/мин, предназначенных для включения в сеть напряжением 127, 220 или 380 В, частотой 50 Гц.
С конденсаторным пуском
Двигатель с конденсаторным пуском — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки с конденсатором включается только на время пуска.

Ёмкостной сдвиг фаз с пусковым конденсатором
Чтобы достичь максимального пускового момента требуется создать круговое вращающееся магнитное поле, для этого требуется чтобы токи в главной и вспомогательной обмотках были сдвинуты друг относительно друга на 90°. Использование в качестве фазосдвигающего элемента резистора или дросселя не позволяет обеспечить требуемый сдвиг фаз. Лишь включение конденсатора определенной емкости позволяет обеспечить фазовый сдвиг 90°.
Среди фазосдвигающих элементов, только конденсатор позволяет добиться наилучших пусковых свойств однофазного асинхронного электродвигателя.
Двигатели в цепь которых постоянно включен конденсатор используют для работы две фазы и называются — конденсаторными. Принцип действия этих двигателей основан на использовании вращающегося магнитного поля.
Двигатель с экранированными полюсами — двигатель с расщепленной фазой, у которого вспомогательная обмотка короткозамкнута.
Статор однофазного асинхронного двигателя с экранированными полюсами обычно имеет явно выраженные полюса. На явно выраженных полюсах статора намотаны катушки однофазной обмотки возбуждения. Каждый полюс статора разделен на две неравные части аксиальным пазом. Меньшую часть полюса охватывает короткозамкнутый виток. Ротор однофазного двигателя с экранированными полюсами — короткозамкнутый в виде «беличьей» клетки.
При включении однофазной обмотки статора в сеть в магнитопроводе двигателя создается пульсирующий магнитный поток. Одна часть которого проходит по неэкранированной Ф’, а другая Ф» — по экранированной части полюса. Поток Ф» наводит в короткозамкнутом витке ЭДС Ek, в результате чего возникает ток Ik отстающий от Ek по фазе из-за индуктивности витка. Ток Ik создает магнитный поток Фk, направленный встречно Ф», создавая результирующий поток в экранированной части полюса Фэ=Ф»+Фk. Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Пространственный и временной углы сдвига между потоками Фэ и Ф’ создают условия для возникновения в двигателе вращающегося эллиптического магнитного поля, так как Фэ ≠ Ф’.
Пусковые и рабочие свойства рассматриваемого двигателя невысоки. КПД намного ниже, чем у конденсаторных двигателей такой же мощности, что связано со значительными электрическими потерями в короткозамкнутом витке.

Статор такого однофазного двигателя выполняется с ярко выраженными полюсами на не симметричном шихтованном сердечнике. Ротор — короткозамкнутый типа «беличья клетка».
Данный электродвигатель для работы не требует использования фазосдвигающих элементов. Недостатком данного двигателя является низкий КПД.
Классификация электродвигателей — устройство и принцип работы

Содержание:
В быту, коммунальном хозяйстве, на любом производстве двигатели электрические являются неотъемлемой составляющей: насосы, кондиционеры, вентиляторы и пр. Поэтому важно знать типы наиболее часто встречающихся электродвигателей.
Электродвигатель является машиной, которая преобразует в механическую энергию электрическую. При этом выделяется тепло, являющееся побочным эффектом.
Видео: Классфикация электродвигателей
Все электродвигатели разделить можно на две большие группы:
- Электродвигатели постоянного тока
- Электродвигатели переменного тока.
Электродвигатели, питание которых осуществляется переменным током, называются двигателями переменного тока, которые имеют две разновидности:
- Синхронные – это те, у которых ротор и магнитное поле питающего напряжения вращаются синхронно.
- Асинхронные. У них отличается частота вращения ротора от частоты, создаваемого питающим напряжением магнитного поля. Бывают они многофазными, а также одно-, двух- и трехфазными.
- Электродвигатели шаговые отличаются тем, что имеют конечное число положений ротора. Фиксирование заданного положения ротора происходит за счет подачи питания на определенную обмотку. Путем снятия напряжения с одной обмотки и передачи его на другую осуществляется переход в другое положение.

К электродвигателям постоянного тока относят те, которые питаются постоянным током. Они, в зависимости от того, имею или нет щёточно-коллекторный узел, подразделяются на:
- Бесколлекторные
-

- Коллекторные
-


Коллекторные также, в зависимости от типа возбуждения, бывают нескольких видов:
- С возбуждением постоянными магнитами.
- С параллельным соединением обмоток соединения и якоря.
- С последовательным соединением якоря и обмоток.
- Со смешанным их соединением.

Электродвигатель постоянного тока в разрезе. Коллектор со щетками – справа
Какие электродвигатели входят в группу «электродвигатели постоянного тока»
Как уже говорилось, электродвигатели постоянного тока составляют группу, в которую входят коллекторные электродвигатели и бесколлекторные, которые выполнены в виде замкнутой системы, включающей датчик положения ротора, систему управления и силовой полупроводниковый преобразователь. Принцип работы бесколлекторных электродвигателей аналогичен принципу работы двигателей асинхронных. Устанавливают их в бытовых прибора, например, вентиляторах.
Что собой представляет коллекторный электродвигатель
Длина электродвигателя постоянного тока зависит от класса. Например, если речь идет о двигателе 400 класса, то его длина составит 40 мм. Отличием коллекторных электродвигателей от бесколлектрных собратьев является простота в изготовлении и эксплуатации, следовательно, и стоимость его будет более низкой. Их особенность — наличие щеточно-коллекторного узла, при помощи которого осуществляется соединение цепи ротора с расположенными в неподвижной части мотора цепями. Состоит он из расположенных на роторе контактов – коллектора и прижатых к нему щеток, расположенных вне ротора.

Ротор

Щетки
Используют эти электродвигатели в радиоуправляемых игрушках: подав на контакты такого двигателя напряжение от источника постоянного тока (той же батарейки), вал приводится в движение. А, чтобы изменить его направление вращения, достаточно изменить полярность, подаваемого напряжения питания. Небольшой вес и размеры, низкая цена и возможность восстановления щеточно-коллекторного механизма делают эти электродвигатели наиболее используемыми в бюджетных моделях, несмотря на то, что он значительно уступает по надежности бесколлекторному, поскольку не исключено искрение, т.е. чрезмерный нагрев подвижных контактов и их быстрый износ при попадании пыли, грязи или влаги.
На коллекторный электродвигатель нанесена, как правило, маркировка, указывающая на число оборотов: чем оно меньше, тем скорость вращения вала больше. Она, к слову, очень плавно регулируется. Но, существуют и двигатели этого типа высокооборотистые, не уступающие бесколлекторным.
Преимущества и недостатки бесколлекторных электродвигателей
В отличие от описанных, у этих электродвигателей подвижной частью является статор с постоянным магнитом (корпус), а ротор с трехфазной обмоткой – неподвижен.
К недостаткам этих двигателей постоянного тока отнести можно менее плавную регулировку скорости вращения вала, но зато они способны за доли секунды набрать максимальные обороты.

Бесколлекторный электродвигатель помещен в закрытый корпус, поэтому он более надежен при неблагоприятных условиях эксплуатации, т.е. ему не страшны пыль и влага. К тому же, его надежность возрастает благодаря отсутствию щеток, как и скорость, с которой вращается вал. При этом, по конструкции мотор более сложен, следовательно, не может быть дешевым. Стоимость его в сравнении с коллекторным, выше в два раза.
Таким образом, коллекторный электродвигатель, работающий на переменном и на постоянном токе, является универсальным, надежным, но более дорогим. Он и легче, и меньше по размерам двигателя переменного тока той же мощности.
Поскольку электродвигатели переменного тока, питающиеся от 50 Гц (питание промышленной сети) не позволяют получать высокие частоты (выше 3000 об/мин), при такой необходимости, используют коллекторный двигатель.
Между тем, его ресурс ниже, чем у асинхронных электродвигателей переменного тока, который зависит от состояния подшипников и изоляции обмоток.
Как работает синхронный электродвигатель
Синхронные машины применяют часто в качестве генераторов. Он синхронно работают с частотой сети, поэтому он с датчиком положения инвертора и ротора, является электронным аналогом коллекторного электродвигателя постоянного тока.
Строение синхронного электродвигателя

Свойства
Эти двигатели не являются механизмами самозапускающимися, а требуют внешнего воздействия для того, чтобы набрать скорость. Применение они нашли в компрессорах, насосах, прокатных станках и подобном оборудовании, рабочая скорость которого не превышает отметки пятьсот оборотов в минуту, но требуется увеличение мощности. Они достаточно большие по габаритам, имеют «приличный» вес и высокую цену.
Запустить синхронный электродвигатель можно несколькими способами:
- Используя внешний источник тока.
- Пуск асинхронный.
В первом случае, с помощью мотора вспомогательного, в качестве которого выступать может электродвигатель постоянного тока или индукционный трехфазный мотор. Изначально ток постоянный на мотор не подается. Он начинает вращаться, достигая близкой к синхронной скорости. В этот момент подается постоянный ток. После замыкания магнитного поля, разрывается связь с вспомогательным двигателем.
Во втором варианте необходима установка в полюсные наконечники ротора дополнительной короткозамкнутой обмотки, пересекая которую магнитное вращающееся поле индуцирует токи в ней. Они, взаимодействуя с полем статора, вращают ротор. Пока он не достигнет синхронной скорости. С этого момента крутящий момент и ЭДС уменьшаются, магнитное поле замыкается, сводя к нулю крутящий момент.
Эти электродвигатели менее чувствительны, чем асинхронные, к колебаниям напряжения, отличаются высокой перегрузочной способностью, сохраняют неизменной скорость при любых нагрузках на валу.
Однофазный электродвигатель: устройство и принцип работы
Использующий после пуска только одну обмотку статора (фазу) и не нуждающийся в частном преобразователе электродвигатель, работающий от электросети однофазного переменного тока, является асинхронным или однофазовым.
Однофазовый электродвигатель имеет вращающуюся часть – ротор и неподвижную – статор, который и создает магнитное поле, необходимое для вращения ротора.

Из двух, расположенных в сердечнике статора друг к другу под углом 90 градусов обмоток, рабочая занимает 2/3 пазов. Другая обмотка, на долю которой приходится 1/3 пазов, называется пусковой (вспомогательной).

Ротор – это тоже короткозамкнутая обмотка. Его стержни из алюминия или меди замкнуты с торцов кольцом, а пространство между ними залито алюминиевым сплавом. Может быть выполнен ротор в виде полого ферромагнитного или немагнитного цилиндра.

Однофазный электродвигатель, мощность которого может быть от десятков ватт до десятка киловатт, применяются в бытовых приборах, устанавливаются в деревообрабатывающих станках, на транспортерах, в компрессорах и насосах. Преимущество их – возможность использования в помещениях, где нет трехфазной сети. По конструкции они не сильно отличаются от электродвигателей асинхронных трехфазного тока.
Шаговый двигатель
Дмитрий Левкин
Шаговый электродвигатель — это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.

Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Реактивный шаговый двигатель — синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.

Трехфазный реактивный шаговый двигатель
(шаг 30°)

Четырехфазный реактивный шаговый двигатель
(шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.

Униполярное волновое управление

Биполярное полношаговое управление

Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
 ,
,
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.

Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.

Схема униполярного двухфазного шагового двигателя

Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.

Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.

Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.

Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.

Схема 4 выводного биполярного шагового двигателя

Схема 5 выводного униполярного шагового двигателя

Схема 6 выводного униполярного шагового двигателя

Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.

Положение ротора шагового двигателя при полношаговом управлении

Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.

Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление — комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.

Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.

Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.

Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.

Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор — постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.