


Регулирование скорости вращения двигателей постоянного тока
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
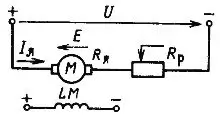
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:
где K’=KC’
т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.
§ 116 РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
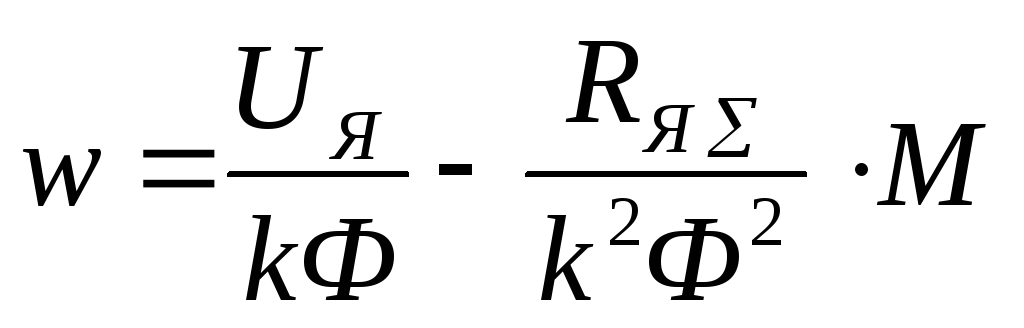
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:
где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.
Как управлять мотором постоянного тока
Двигатель постоянного тока
Для начала рассмотрим повнимательней обычный двигатель постоянного тока. Любой двигатель имеет две основные части — ротор и статор. В коллекторном двигателе статор — неподвижная часть, состоит из постоянных магнитов (или в более мощных двигателях электромагнитов). Ротор (якорь) — вращается, совмещён с валом двигателя и состоит из многих катушек (как минимум трех). Коллектор (щёточно-коллекторный узел) отвечает за переключение выводов катушек ротора. Ток в таком двигателе подводится к катушкам ротора через скользящие контакты (или щётки). В один момент времени подключена только одна катушка, она и создаёт момент вращения двигателя за счет проходящего тока.
С точки зрения базовых элементов схемотехники любой двигатель можно представить в виде следующей эквивалентной схемы:
Когда мотор подключён источнику постоянного тока и еще не начал вращаться, то он представляет из себя обычное сопротивление. То есть через него течет ток согласно закону Ома и сопротивлению его обмотки. Преобладает компонента R. Индуктивность начинает влиять когда напряжение не постоянное, например, если мотор питается от ШИМ (PWM) сигнала.
Сопротивление ротора и индуктивность, как правило, очень малы. Его можно померить обычным мультиметром. Небольшие модельные моторы имеют сопротивление 1-10 Ом. Поэтому, при старте мотора (когда он ещё не начал вращаться), ток сильно превышает рабочий ток мотора и если мотор долго будет неподвижен (его заклинило), то такой высокий ток может привести к перегреву мотора и выходу из строя.
Индуктивность катушек ротора пытается поддерживать ток протекающий через обмотки постоянным. Ее влияние заметно только когда напряжение меняется. Когда мотор начинает вращаться, то коллектор начинает переключать катушки ротора, что вызывает изменение напряжения. Индуктивность пытается в эти моменты поддерживать ток протекающий через мотор на постоянном уровне за счет напряжения.
Во время вращения катушки ротора начинают вырабатывать ток (как генератор) — возникает обратная ЭДС. Чем быстрее вращается ротор, тем выше обратная ЭДС возникающая в катушках, а так как она направлена против напряжения питания, то ток потребляемый мотором снижается.
В дальнейшем нам понадобятся следующие выводы:
пока мотор не начал вращаться он является сопротивлением
если приложить к мотору изменяющееся напряжение (например PWM), то индуктивность будет иметь большое влияние, она будет сопротивляться изменению тока через мотор
когда мотор вращается, то он является генератором, и за счет этого потребляемый ток снижается (итоговое напряжение равно V — Vbemf).
Как подключить мотор к МК
В данной статье мы будем разбираться как управлять с помощью МК скоростью и направлением вращения обычным двигателем постоянного тока.
Для того чтобы коллекторный мотор постоянного тока начал вращаться, достаточно подать на него определённое напряжение. Полярность данного напряжения будет определять направление его вращения, а величина напряжения — скорость вращения. Напряжение нельзя менять безгранично. Каждый мотор рассчитан на определённый диапазон напряжений. При повышении напряжения ток через мотор будет расти, и он начнётся перегреваться и может сгореть. На следующем графике некоего мотора хорошо видна взаимосвязь его основных показателей.
Максимальной
мощности (Torque — крутящий момент) мотор
достигает при максимальном токе. И
зависимость тока и момента — линейная.
Максимальной скорости двигатель
достигает при отсутствии нагрузки (на
холостых оборотах), при увеличении
нагрузки скорость вращения падает.
Номинальное рабочее напряжение указано
в паспорте на двигатель и именно для
него и приведён и этот график. Если же
снижать напряжение, то скорость вращения,
и все остальные показатели будут тоже
падать. Как правило, ниже 30-50% от
номинального напряжения мотор перестанет
вращаться. Если же мотор не сможет
прокрутить вал (его заклинило), то по
сути станет сопротивлением и потребляемый
ток достигает максимальной величины,
зависящей от внутреннего сопротивления
его обмоток. Обычный мотор не рассчитан
на работу в таком режиме и может сгореть.
Посмотрим как меняется ток от нагрузки на реальном моторе R380-2580.
Мы
видим, что рабочее напряжение данного
мотора — 12В, потребляемый ток под
нагрузкой — 1.5А. Ток останова мотора
вырастает до 8А, а в холостом же вращении,
потребляемый ток равен всего 0.8А.
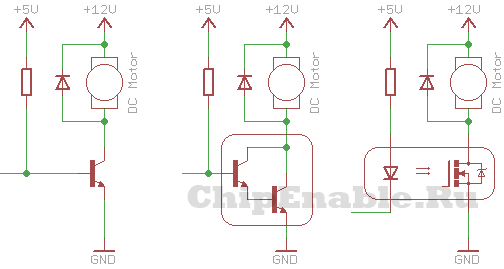
Как мы знаем, порт микроконтроллера не может выдать ток больше 50мА, и напряжение питания 12В для него слишком большое. Для управления моторами нам понадобится электронный ключ — транзистор, возьмём обычный биполярный транзистор NPN и подключим его по следующей неправильной схеме.
Чтобы мотор начал вращаться, на базу транзистора необходимо подать небольшой ток, далее транзистор откроется и сможет пропустить через себя гораздо больший ток и напряжение — мотор будет вращаться. Стоит отметить что, если мы соберём такую схему, то транзистор очень скоро, если не сразу, выйдет из строя. Чтобы этого не произошло, его необходимо защитить.
Как мы уже знаем одна из компонент мотора — индуктивность — сопротивляется изменению тока. Поэтому, когда мы закроем транзистор, чтобы выключить мотор, то сопротивление транзистора резко увеличится и он перестанет пропускать через себя ток. Однако индуктивность будет сопротивляться этому, и для того, чтобы удержать ток на прежнем уровне, по закону Ома, напряжение на коллекторе транзистора начнёт резко повышаться (может достигнуть даже 1000В, правда очень на малое время) и транзистор сгорит. Чтобы этого не произошло необходимо параллельно обмоткам мотора поставить диод, который откроет путь для обратного напряжения и замкнёт его на обмотке мотора, тем самым защитит транзистор.
Также, все постоянные моторы имеют еще одну неприятность — при вращении механический контакт в коллекторе не идеален, щётки искрят в процессе работы, создавая помехи, что может привести к сбою микроконтроллера. Чтобы снизить эти помехи, необходимо использовать конденсаторы небольшой ёмкости, подключенный параллельно выводам мотора (как можно ближе к самому мотору). Вот окончательная правильная схема (диод может быть не обязательно Шоттки, но он предпочтителен).
Биполярные транзисторы в открытом состоянии они ведут себя как диоды (на них падает около 0.7 В). А это, в свою очередь, вызывает их большой нагрев на больших токах и снижает КПД схемы управления мотором. Поэтому лучше управлять моторами с помощью полевых (MOSFET) транзисторов. В настоящее время они достаточно распространены и имеют невысокую цену. Их низкое сопротивление в открытом состоянии позволяет коммутировать очень высокие токи с минимальными потерями. Однако и у них есть свои недостатки. Так как MOSFET транзисторы управляются напряжением, а не током (и обычно оно составляет 10В), то нужно или выбирать специальные логические MOSFET, которые могут управляться низким напряжением — 1.8 .. 2.5В или использовать специальные схемы накачки напряжения (драйверы полевых транзисторов). Как выбирать MOSFET под вашу схему мы рассмотрим в других статьях, на конкретных приборах.
Теперь, подавая на выход микроконтроллера логическую единицу, мы заставим мотор вращаться, а логический ноль — остановится. Однако вращаться он будет с постоянной скоростью и только в одну сторону. Хотелось бы иметь возможность менять направление вращения мотора, а также его скорость. Рассмотрим, как этого можно добиться с помощью микроконтроллера.
H-Мост — меняем направление вращения мотора
Для управления направлением вращения мотора существует специальная схема, которая называется H-мост (схема выглядит как буква H).
Работает
схема очень просто. Если открыть верхний
правый и левый нижний транзистор, то на
клемах мотора справа будет плюс, а слева
будет минус. Мотор будет крутиться в
одну сторону. Если открыть левый верхний
и правый нижний, то справа будет минус,
а слева плюс — полярность тока сменится,
и мотор будет крутиться в другую сторону.
Паразитные диоды внутри MOSFET транзисторов
будут защищать всю схему (параметры
этих диодов не очень хорошие и в реальных
схемах могут понадобиться более
быстродействующие диоды Шотке параллельно
паразитным диодам, для снижения нагрева
полевого транзистора), так что лишние
компоненты не понадобятся, кроме
искрогасящего конденсатора.
В схеме H-моста в качестве нижних транзисторов всегда используются N-канальные, а вот верхние могут быть как N-канальные, так и P-канальные. P-канальными транзисторами в верхнем ключе проще управлять, достаточно сделать схему смещения уровня напряжения на затворе. Для этого можно использовать маломощный N-канальный полевой или биполярный транзистор. Нижним транзистором можно управлять напрямую от МК, если выбрать специальный логический полевой транзистор.
Если в вашей схеме будет использоваться высоковольтный мотор постоянного тока (больше 24В) или мощный мотор с токами более 10А, то лучше использовать специальные микросхемы — драйверы MOSFET транзисторов. Драйверы управляются, как правило, сигналами микроконтроллера от 2 до 5В, а на выходе создают напряжение необходимое для полного открытия MOSFET транзисторов — обычно это 10-15В. Также драйверы обеспечивают большой импульсный ток необходимый для ускорения открытия полевых транзисторов. С помощью драйверов легко организовать управление верхним N-канальным транзистором. Очень хорошим драйвером является микросхема L6387D от компании ST. Данная микросхема хороша тем, что не требует диода для схемы накачки напряжения. Вот так она подключается для управления H-мостом на 2-х N-канальных транзисторах.
N-канальные
полевые транзисторы, стоят дешевле
P-канальных, а также имеют меньшее
сопротивление в открытом состоянии,
что позволяет коммутировать большие
токи. Но ими сложнее управлять в верхнем
положении. Проблема использования
N-канального транзистора в верхнем ключе
состоит в том, что для его открытия нужно
подать напряжение 10В относительно
Истока, а как вы видите на схеме там
может быть все напряжение питания
мотора, а не 0 вольт. Таким образом, на
базу необходимо подать 10В + напряжение
питания мотора. Нужна специальная
bootstrap схема для повышения напряжения.
Обычно, для этих целей используется
схема накачки напряжения на конденсаторе
и диоде. Однако такая схема работает
только, если вы постоянно подзаряжаете
конденсатор — открывая, закрывая нижний
транзистор (в ШИМ управлении). Для
возможности поддерживания верхнего
транзистора постоянно открытым нужно
еще усложнять схему — добавлять схему
внешней подпитки конденсатора. Вот
пример схемы управления N-канальными
транзисторами без использования
микросхем драйверов.
Перейдём к управлению скоростью вращения мотора.
ШИМ сигнал — управляем скоростью вращения мотора
Моторы постоянного тока имеют линейную зависимость скорости вращения от приложенного напряжения. Таким образом, чтобы снизить скорость вращения, надо подать меньше напряжения. Но надо помнить, что с падением напряжения, у мотора падает мощность. Поэтому, на практике, можно управлять скоростью мотора только в пределах 30%-50% от полной скорости вращения мотора. Для управления скоростью мотора без потери мощности, необходима обратная связь от мотора по оборотам вращения, например как в электрическом шуруповерте. Такой режим управления, требует более сложной схемы. Мы же будет рассматривать простой вариант — управление скоростью мотора без обратной связи.
Итак, нам необходимо менять напряжение подаваемое на мотор. В нашем распоряжении есть MOSFET транзистор. Мы помним, что наш мотор имеет индуктивность. Индуктивность сопротивляется изменению тока. И если быстро включать и выключать напряжение на моторе, то в момент выключения ток будет продолжать течь благодаря индуктивности. А мотор будет продолжать вращаться по инерции, а не остановится. Но естественно, вращаться он будет медленнее, среднее напряжение на его обмотках будет меньшее.
Микроконтроллер, как раз, отлично умеет генерировать импульсный ШИМ (PWM) сигнал. А мотор умеет интегрировать данный сигнал (усреднять) за счёт индуктивности обмоток и инерции ротора. От коэффициента заполнения (скважности) ШИМ сигнала как раз и будет зависеть полученное мотором среднее напряжение, а значит и скорость.
Какая же частота ШИМ нужна для лучшего управления мотором? Ответ очень простой, чем больше, тем лучше. Минимальная частота зависит от индуктивности мотора, а также массы ротора и нагрузки на вал мотора. Если смоделировать в электрическом симуляторе (например, PROTEUS) ШИМ управление мотором, то будет видно, что чем больше частота ШИМ, тем более ровный ток протекает через мотор (ripple current — снижается при увеличении частоты). Низкая частота:
высокая
частота:
Если же частота упадёт ниже определённого уровня, ток станет разрывным (будет падать до нуля) и в итоге мотор не сможет крутиться.
Отлично, все просто! Делаем частоту ШИМ побольше, например 1 МГц, и любому мотору хватит. В жизни же, все не так просто. Для понимания всех возможных проблем можно упрощенно принять затвор MOSFET транзистора за идеальный конденсатор. Для того чтобы транзистор полностью открылся, конденсатор необходимо зарядить до 10В (на самом деле меньше). Чем больше ток, который мы можем вкачать в конденсатор, тем быстрее он зарядится, а значит быстрее откроется транзистор. В процессе открытия транзистора, ток и напряжение на нем будут максимальными, и чем больше это время, тем сильнее нагреется транзистор. В datasheet обычно есть такой параметр как Qgate — полный заряд, который надо передать транзистору, чтобы он открылся полностью.
Чем меньше эта величина, тем меньшей ток нужен для управления данным транзистором. Естественно, такой ток нужен только на очень короткое время — какое, опять же написано в datasheet — tr, обычно оно измеряется в наносекундах. Чтобы выдать такой ток, нужны специальные драйверы, если же мы управляем логическим MOSFET напрямую от микроконтроллера, то мы не сможем обеспечить такой ток. Поэтому для защиты микроконтроллера необходимо перед базой MOSFET ставить резистор, а это сильно замедляет время открытия. В итоге, микроконтроллер в прямом управлении не может обеспечить более 1-2 мкc на открытие и закрытие транзистора. Время открытия и закрытия должно занимать не более 10% длительности ШИМ сигнала. Таким образом, мы сразу получаем ограничение в частоте — 50 000 Гц. Дополнительно, сам микроконтроллер должен иметь возможность генерировать ШИМ сигнал с возможностью хотя бы 8 битного управления шириной ШИМ (для этого требуется большая рабочая частота МК). В итоге, обеспечить большую частоту ШИМ не так просто. Так же, на высоких частотах, начитает мешать паразитные ёмкости и индуктивности. На плате, которую можно сделать дома, получить частоту ШИМ больше 300 кГц, очень сложно. Трассировка платы должна быть сделана идеально. Для снижения требований к плате, в настоящее время выпускаются специальные MOSFET, объединённые с драйверами управления, они позволяют на заводских, многослойных платах получить частоту управления MOSFET в 2МГц.
Индуктивность моторов не такая уж маленькая, и такие большие частоты не нужны. Для управления моторами постоянного тока вполне достаточно 8 кГц, лучше около 20кГц (за звуковым диапазоном).
Дополнительно стоит отметить, что для снижения стартового тока необходимо плавно поднимать на старте частоту ШИМ. А еще — лучше контролировать стартовый ток мотора с помощью датчиков тока.
ШИМ управление мотором предполагает очень быстрое изменение напряжение от 0 для максимального, что порождает большие проблемы при трассировке платы. Перечислим коротко правила, которые необходимо соблюдать при трассировке платы.
Земли управления моторами и микроконтроллера обязательно должны быть разделены, соединение в одной точке тонким проводником, например 0.3мм, как можно ближе к проводам питания всей схемы
Драйвера управления MOSFET должны быть как можно ближе к самим MOSFET транзисторам
Исполнение управляющей области обязательно двухсторонее, желательно с земляным слоем с одной стороны. При импульсном управлении возникают электромагнитные помехи, чтобы снизить их, земляной слой должен быть рядом.
Обязательно наличие конденсатора как можно ближе к зоне прохождения больших импульсных токов. Если такого конденсатора не будет, то напряжение на линии питания будет сильно проседать и микроконтроллер будет постоянно сбрасываться. Также без такого конденсатора, за счёт индуктивности проводов питания, напряжения на линии питания может увеличиться в несколько раз и компоненты выйдут из строя!
Более подробно мы рассмотрим как работают эти правила на конкретных приборах.
ШИМ сигнал в H-мосте
Чтобы можно было менять направление вращения и скорость — нужна схема H-моста, а для регулирование скорости нужно управлять транзисторами ШИМ сигналом. В схеме H-моста четыре транзистора. Как лучше ими управлять? На какой транзистор подавать ШИМ сигнал? Разберёмся в этом вопросе (рекомендуем прочитать очень подробную статью на эту тему).
Рассмотрим нашу схему с точки зрения нагрева транзисторов. Это один из основных критериев, по которому наш прибор может выйти из строя. Полевой транзистор состоит из двух элементов — собственно транзистор и паразитный диод. В схеме управления мотором оба элемента работают. Нагрев полевого транзистора происходит в следующие моменты времени:
когда транзистор открыт, нагрев идёт из-за сопротивления в открытом состоянии Rdson, пропорционально времени открытия транзистора выделяется мощность P = I * I * Rdson
когда транзистор закрыт, то ток ЭДС мотора идёт через диод, то есть нагрев идет из-за диода P = I * U diode forward (как правило 1В)
когда транзистор переключается из открытого состояния в закрытое, то нагрев пропорционален времени открытия и закрытия транзистора
Посмотрим, как влияет схема управления на нагрев нашим электронных ключей. Допустим, что мы управляем мотором ШИМ сигналом со скважностью 50% и мотор крутится в одну сторону.
Самый простой вариант — применить ШИМ сигнал к одному из двух транзисторов, а второй оставить все время открытым. Обычно, ШИМ в этом случае подаётся на нижний транзистор (N типа), который обычно быстрее. В этом случае нагрев нижнего будет больше верхнего на величину тепла выделяемого при переключениях транзистора. Чтобы сравнять счёт, можно попеременно подавать ШИМ сигнал то на верхний (если они одинаковые), то на нижний транзистор. Также можно подавать ШИМ на оба транзистора одновременно, но из-за разницы в транзисторах это будет не эффективно, а также будет увеличивать нагрев за счёт переключения транзисторов. При такой схеме управления, два других транзистора работают как диоды. К счастью, наибольший ток через диод будет при наибольшей скважности ШИМ, при этом диод будет задействован очень малое время.
Для исключения тока через диоды, которые дают существенный нагрев, можно мотор никогда не отключать от напряжения, а вместо этого, крутить его в обратную сторону. Таким образом, мы должны, например 70% ШИМ сигнала крутить вправо, а 30% влево. Это даст в итоге 70%-30%=40% скорости вправо. Но при этом не будут задействованы диоды. Такой метод управления называется комплиментарным. Такая схема требует большого конденсатора на линии питания, а также источника питания, который может потреблять ток (например аккумулятора).
Вместо вращения мотора в разные стороны, можно помогать диодам — а именно тормозить мотор, открывать два верхних транзистора в момент низкого уровня ШИМ сигнала. На практике, все эти методы не дают существенного изменения скорости вращения двигателя, но позволяют эффективно управлять нагревом полевых транзисторов. Более подробно про особенности различных схем управления можно в этой статье.
На этом мы закончим нашу статью про моторы. Теперь можно перейти к практике — будем делать плату управления 4-мя моторами для робота.
Регулятор скорости двигателя постоянного тока
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
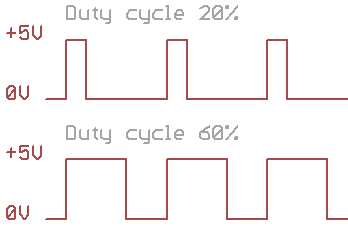
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
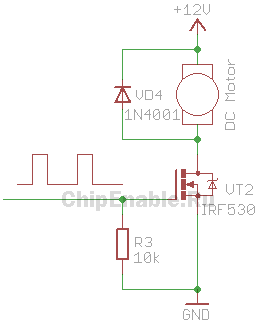
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
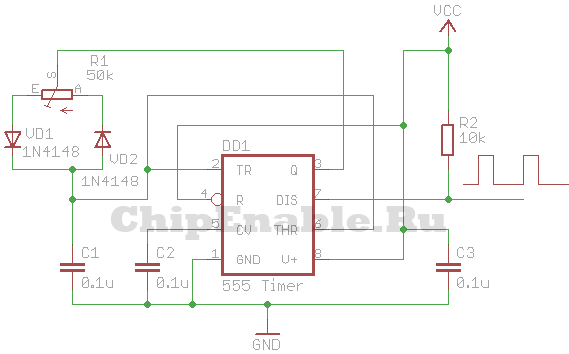
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
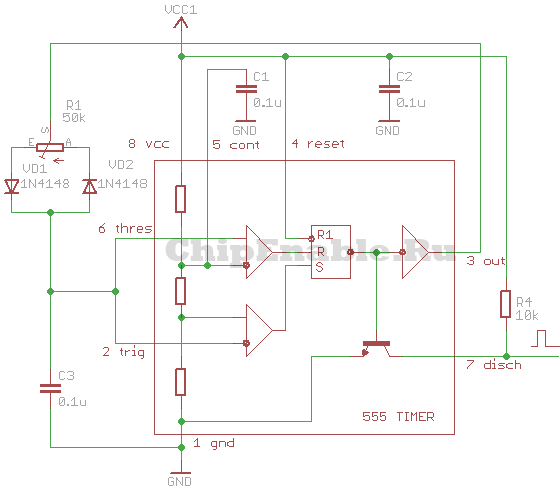
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.

VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Регулирование электродвигателей постоянного тока | КИП и АММИАЧНЫЕ ХОЛОДИЛЬНЫЕ УСТАНОВКИ
Как известно в холодильной технике, да и не только там, необходимо регулировать скорость вращения электродвигателей. Это необходимо для плавного регулирования параметров установки, а как следствие и производительности. Ниже мы рассмотрим способы регулирование электродвигателей постоянного тока.
Способы регулирования электродвигателей постоянного тока.
Как известно, работа электрического двигателя постоянного тока основана на явлении электромагнитной индукции. При этом на проводник с током, помещенный в магнитное поле, действует сила, определяемая следующим образом:
F = BIL,
где I — ток, протекающий по проводнику [A], В — индукция магнитного поля [Тл]; L — длина проводника [м].
При пересечении проводником магнитных силовых линий в нем наводится электродвижущая сила (ЭДС), которая направлена против тока в проводнике и поэтому называется обратной или противодействующей ЭДС. Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
[hana-code-insert name=’reclam google’ /]Электродвигатели постоянного тока применяют в электроприводах, где требуются большой диапазон регулирования скорости, большая точность поддержания скорости вращения, возможность регулирования скорости в большую сторону относительно номинальной.
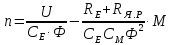
С точки зрения регулирования электродвигателей нас будет интересовать формула для определения частоты вращения. Частота вращения электродвигателя постоянного тока определяется следующим образом:
n = (U – Iя Rя)/(kc Ф),
где U — напряжение питающей сети [В], Iя — ток якоря [A], Rя — сопротивление цепи якоря [Ом], kс — коэффициент, характеризующий магнитную систему, Ф — магнитный поток электродвигателя [Вб].
Данное выражение называется уравнением электромеханической характеристики двигателя постоянного тока независимого возбуждения. Из него следует, что существует три способа регулирования угловой скорости:
- за счет изменения величины сопротивления реостата в цепи якоря;
- за счет изменения потока возбуждения двигателя Ф;
- за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Остановимся подробнее на каждом из этих способов.
Вариант регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря приводит к изменению жесткости характеристик в широких пределах, а потому при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен. Скорость можно регулировать в сторону уменьшения от номинальной (об этом свидетельствуют электромеханические и механические характеристики). Высокую плавность регулирования обеспечить трудно. Также недостатком является и наличие значительных потерь мощности в процессе регулирования.
При втором способе регулирование осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока уменьшается. Однако на практике возможно изменение скорости только в сторону увеличения. Благодаря возможности плавного изменения сопротивления реостата появляется и возможность плавного регулирования скорости вращения электродвигателя. Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Однако данный вид регулирования практически не высвобождает мощности (энергопотребление постоянно), а потому используется в приводах только в качестве вспомогательного, причем, как правило, только в условиях холостого хода.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю.
При этом следует отметить, что все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной. Таким образом, работа двигателя является стабильной на всех угловых скоростях, и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Более того, угловую скорость можно уменьшать и увеличивать относительно номинальной. Также достаточно просто обеспечить и плавное регулирование частоты вращения электродвигателя: для этого достаточно плавно изменять напряжение постоянного тока.
Наконец, этот вариант регулирования является наиболее экономичным, поскольку регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря.
[hana-code-insert name=’POBOLYreklama’ /]Учитывая все факторы вышеизложенного анализа существующих способов регулирования частоты двигателей постоянного тока, можно утверждать, что третий способ регулирования является наилучшим.
Именно поэтому в климатической технике регулирование двигателей постоянного тока реализовано посредством изменения питающего напряжения.
Рассмотрим возможные варианты изменения (регулирования) напряжения постоянного тока.
45 Перечислите способы регулирования скорости дпт независимого возбуждения.
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
1) Рассмотрим первый способ регулирования
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
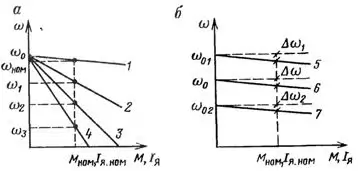
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
По этой причине диапазон регулирования скорости ограничен (D= 2 — З).
Недостатком является наличие значительных потерь мощности при регулировании,
Достоинством простота и надежность схемы управления.
2) При втором способе рег-ие осущ-ся изм-ем величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
Диапазон регулирования скорости для данного способа D = 2 — 4.
Меха-ие хар-ики для различных значений потока дв-ля приведены на рис. 2, а и 2, б, из которых видно, что хар-ки в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения ДПТ независимого возбуждения обладают значит-ой индуктивностью. В связи с этим рег-ие угловой скорости будет осуществляться плавно.
Преимуществами являются его простота и высокая экономичность.
3) Третий способ рег-ия скорости закл-ся в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные хар-ки являются жесткими, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки.
Диапазон рег-ия равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя.
Преимущества данный способ рег-ия явл-ся экономичным, так-так регул-ие угловой скорости двигателя осущ-ся без дополнительных потерь мощности в силовой цепи якоря.
46 Достоинства и недостатки реостатного способа регулирования скорости дпт параллельного возбуждения.
Он связан с включением последовательно с якорем регулировочного реостата Rя.р
Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики.
Достоинства простота осуществления и дешевизна.
Недостатки оно неэкономично примерно половина мощности, потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой в реостате, т. е. плавность регулирования не большая.
Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
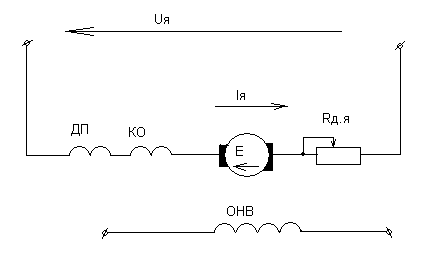
Рисунок — Схема включения двигателя постоянного тока независимого возбуждения.
Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик.
Для оценки различных способов регулирования скорости существуют следующие параметры:
Диапазон регулирования:
 это соотношениек,
при которых работа привода при
существующих нагрузках будет устойчивой;
это соотношениек,
при которых работа привода при
существующих нагрузках будет устойчивой;Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии;
Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
 это соотношение
это соотношение к
к ,
при которых работа привода при
существующих нагрузках будет устойчивой;
,
при которых работа привода при
существующих нагрузках будет устойчивой;Запишем уравнение электромеханической характеристики:
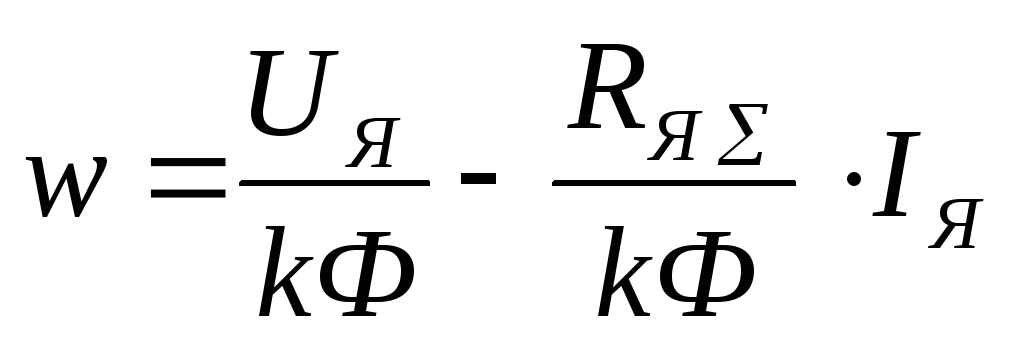 ,
,
из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
- — введение в цепь якоря;
Изменением магнитного потока Ф;
Изменением напряжения, подводимого к якорю
.
 — введение в цепь якоря
— введение в цепь якоря ;
; .
.Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
Рисунок — Схема включения двигателя постоянного тока независимого возбуждения.
Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик.
Для оценки различных способов регулирования скорости существуют следующие параметры:
Диапазон регулирования:
это соотношениек,
при которых работа привода при
существующих нагрузках будет устойчивой;Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии;
Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
 это соотношение
это соотношение к
к ,
при которых работа привода при
существующих нагрузках будет устойчивой;
,
при которых работа привода при
существующих нагрузках будет устойчивой;Запишем уравнение электромеханической характеристики:
 ,
,
из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
- — введение в цепь якоря;
Изменением магнитного потока Ф;
Изменением напряжения, подводимого к якорю
.
 — введение в цепь якоря
— введение в цепь якоря ;
; .
.Регулирование скорости изменением сопротивления якорной цепи.
Р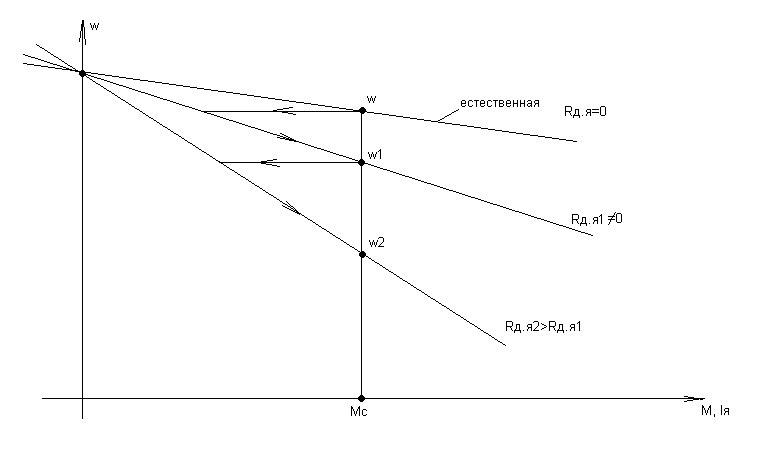 егулирование
скорости введением
егулирование
скорости введением обеспечивает при
обеспечивает при снижение скорости двигателя.
снижение скорости двигателя.
Оценим приведенный способ регулирования:
Диапазон регулирования не превышает 3:1, т.к. работа при низких скоростях нестабильна незначительное изменение МСможет вызвать остановку двигателя. С уменьшением МСуменьшается диапазон регулирования;
Регулирование ступенчатое;
Регулировать можно только вниз от основной скорости.
II. Регулирование скорости изменением магнитного потока.
Отметим, что изменение Ф возможно лишь
в сторону уменьшения, т.е. в режиме,
близком к номинальному, магнитная
система двигателя насыщена. Уменьшение
Ф<ФНприводит к увеличению и увеличенной просадке скорости
и увеличенной просадке скорости .
.

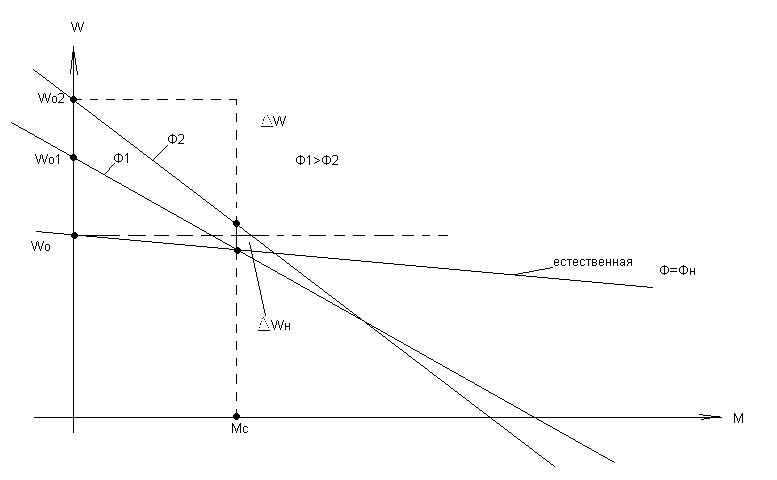
Т.к.  ,
то при ослаблении поля электрического
двигателя, приMC=const,IC.
,
то при ослаблении поля электрического
двигателя, приMC=const,IC.
Оценим заданный способ регулирования:
Диапазон регулирования для большинства двигателей (1,5…2):1
Для двигателя независимого возбуждения можно обеспечить плавное регулирование.
Регулирование экономичное, т.к. капитальные затраты и потер при этом невелики из-за невысокой мощности цепи возбуждения.
Регулирование wвозможно только вверх от основной скорости.
Регулирование скорости изменением подводимого напряжения.
При изменении подводимого напряжения
изменяется лишь скорость идеального
Х.Х.  ,
поэтому все характеристики расположены
параллельно друг другу и параллельно
естественной характеристике.
,
поэтому все характеристики расположены
параллельно друг другу и параллельно
естественной характеристике.
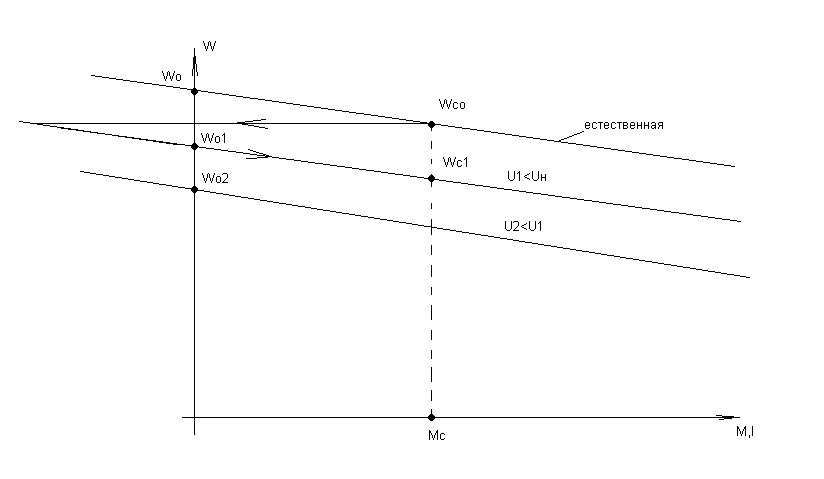
Оценим данный способ регулирования:
Диапазон регулирования (20…30):1
Регулирование скорости плавное
Отличается экономичностью, т.к. энергия торможения возвращается в сеть
Регулирование, как правило, вниз от основной скорости и лишь некоторые двигатели позволяют увеличить UЯвышеUЯН.
4.6. Регулирование угловой скорости двигателя постоянного тока последовательного возбуждения
Для двигателя последовательного возбужде- ния, как и для двигателя независимого возбуждения, воз- можны три способа регулирования угловой скорости, а именно; 1) регулирование посредством резисторов, вклю- ченных в цепь якоря; 2) регулирование изменением тока возбуждения; 3) регулирование изменением подводимого напряжения.


Это вытекает из уравнения электромеханической харак- теристики двигателя
Регулирование угловой скорости изменением сопротивле- ния резисторов в цепи якоря. Введением резисторов после- довательно с обмоткой якоря двигателя можно ступенчато регулировать его угловую скорость вниз от основной. Жесткость характеристик при этом уменьшается по. мере увеличения сопротивления резистора, т. е. стабильность угловой скорости невысокая, уменьшается по мере уве- личения диапазона регулирования и зависит от момента сопротивления (см. рис. 3.75). Диапазон регулирования угловой скорости не превышает (2 -:- 2,5) : 1 и зависит от нагрузки. Регулирование угловой скорости изменением сопротивления последовательно включенного резистора по условиям полного использования двигателя на всех угло- вых скоростях должно производиться при постоянном нагрузочном моменте, что соответствует работе двига- теля с неизменным током якоря, равным номинальному. Как и в предыдущем случае, не учитывается ухудшение условий вентиляции при снижении угловой скорости. Несмотря на большие потери в резисторах, этот способ находит применение в крановых и тяговых установках, поскольку он является одним из простейших для двига- телей последовательного возбуждения, применяемых в ука- занных приводах, а также потому, что работа этих уста- новок происходит с перерывами.Регулирование угловой скорости изменением тока воз- буждения. Этот способ применяется в тех случаях, когда требуется расширить пределы регулирования, за счет увеличения угловой скорости выше основной при загрузке двигателя номинальным током. В этом случае приходится осуществлять изменение тока возбуждения при помощи шунтирования обмотки возбуждения двига- теля .
Регулирование угловой скорости изменением подводимого напряжения. Регулирование может быть осуществлено с помощью отдельного генератора, тиристорного преобра- зователя либо последовательно-параллельным включением двигателей. При последовательно-параллельном включении двух двигателей можно получить две ступени угловой скорости благодаря изменению напряжения, подводимого
к каждому из двигателей 1. Подобный способ регулирова- ния осуществляется в том случае, если один производствен- ный механизм приводится одновременно двумя двигателями половинной мощности. Применение двух двигателей вместо одного возможно по разным причинам, например: из-за необходимости сократить время пуска и торможения путем уменьшения суммарного момента инерции или по условиям большей надежности работы, если ее можно вести при пониженной мощности, т. е. с одним двигателем, или, на- конец, по условиям удобства размещения двух двигателей
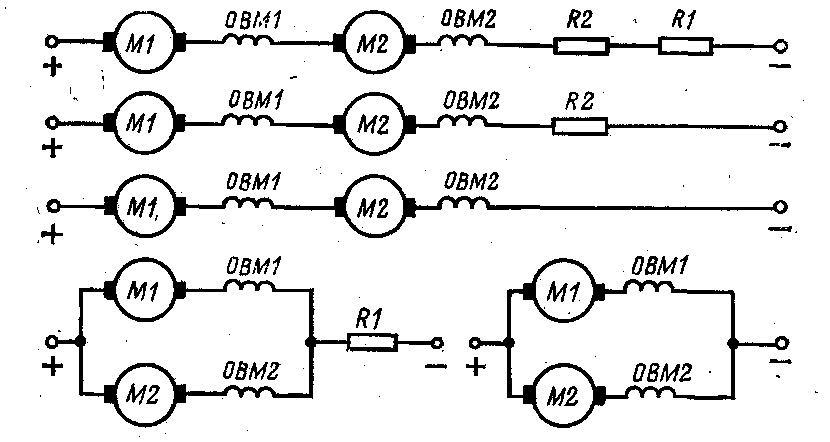
Рис. 4.23. Последовательность переключений при регулировании уг- лэвой скорости двух одинаковых двигателей постоянного тока после- довательного возбуждения.
меньших габаритов вместо одного большого. Такой при- вод находит применение, например, для мощных разли- вочных кранов, в транспортных устройствах, трамваях, в доменных подъемниках, мощных ножницах для разреза- ния металла и для других механизмов. В подобных меха- низмах два двигателя одинаковой мощности работают на один общий вал (многодвигательный электропривод).
Применение последовательно-параллельного включения дает экономические выгоды. При последовательном вклю- чении на каждый из двигателей приходится половина напряжения сети. Когда двигатели переключаются на
1 Такая схема применима и для нескольких двигателей, а также для двигателей независимого или смешанного возбуждения.
параллельную работу, каждый из них оказывается включен- ным на полное напряжение. Таким образом, получаются две ступени регулирования без добавочной бесполезной траты энергии. При снижении угловой скорости вдвое роль резистора, в котором должно теряться напряжение, играет второй двигатель, полезно использующий энергию. Для получения промежуточных ступеней регулирования в цепь якоря может быть введен добавочный резистор. На рис. 4.23 приведены принципиальные схемы переклю- чений, согласно которым получается пять ступеней регу- лирования, из них две без потерь в резисторах. В целях полного использования двигателей это регулирование может производиться при постоянном нагрузочном моменте (без учета ухудшения условий вентиляции).
Кроме указанных способов, находит применение и ком- бинированный способ регулирования угловой скорости — сочетание регулирования изменением подводимого к якорю напряжения и тока возбуждения с реостатным. Этот спо- соб реализуется в схеме шунтирования обмотки якоря.