


%d0%b0%d1%81%d0%b8%d0%bd%d1%85%d1%80%d0%be%d0%bd%d0%bd%d1%8b%d0%b9%20%d1%8d%d0%bb%d0%b5%d0%ba%d1%82%d1%80%d0%be%d0%b4%d0%b2%d0%b8%d0%b3%d0%b0%d1%82%d0%b5%d0%bb%d1%8c%20%d1%81%20%d1%84%d0%b0%d0%b7%d0%bd%d1%8b%d0%bc%20%d1%80%d0%be%d1%82%d0%be%d1%80%d0%be%d0 — с русского на все языки
Все языкиАнглийскийРусскийКитайскийНемецкийФранцузскийИспанскийИтальянскийЛатинскийФинскийГреческийИвритАрабскийСуахилиНорвежскийПортугальскийВенгерскийТурецкийИндонезийскийШведскийПольскийЭстонскийЛатышскийДатскийНидерландскийАрмянскийУкраинскийЯпонскийСанскритТайскийИрландскийТатарскийСловацкийСловенскийТувинскийУрдуИдишМакедонскийКаталанскийБашкирскийЧешскийГрузинскийКорейскийХорватскийРумынский, МолдавскийЯкутскийКиргизскийТибетскийБелорусскийБолгарскийИсландскийАлбанскийНауатльКомиВаллийскийКазахскийУзбекскийСербскийВьетнамскийАзербайджанскийБаскскийХиндиМаориКечуаАканАймараГаитянскийМонгольскийПалиМайяЛитовскийШорскийКрымскотатарскийЭсперантоИнгушскийСеверносаамскийВерхнелужицкийЧеченскийГэльскийШумерскийОсетинскийЧеркесскийАдыгейскийПерсидскийАйнский языкКхмерскийДревнерусский языкЦерковнославянский (Старославянский)МикенскийКвеньяЮпийскийАфрикаансПапьяментоПенджабскийТагальскийМокшанскийКриВарайскийКурдскийЭльзасскийФарерскийАбхазскийАрагонскийАрумынскийАстурийскийЭрзянскийКомиМарийскийЧувашскийСефардскийУдмурдскийВепсскийАлтайскийДолганскийКарачаевскийКумыкскийНогайскийОсманскийТофаларскийТуркменскийУйгурскийУрумскийБурятскийОрокскийЭвенкийскийМаньчжурскийГуараниТаджикскийИнупиакМалайскийТвиЛингалаБагобоЙорубаСилезскийЛюксембургскийЧерокиШайенскогоКлингонский
Все языкиАнглийскийНемецкийНорвежскийКитайскийИвритФранцузскийУкраинскийИтальянскийПортугальскийВенгерскийТурецкийПольскийДатскийЛатинскийИспанскийСловенскийГреческийЛатышскийФинскийПерсидскийНидерландскийШведскийЯпонскийЭстонскийТаджикскийАрабскийКазахскийТатарскийЧеченскийКарачаевскийСловацкийБелорусскийЧешскийАрмянскийАзербайджанскийУзбекскийШорскийРусскийЭсперантоКрымскотатарскийСуахилиЛитовскийТайскийОсетинскийАдыгейскийЯкутскийАйнский языкЦерковнославянский (Старославянский)ИсландскийИндонезийскийАварскийМонгольскийИдишИнгушскийЭрзянскийКорейскийИжорскийМарийскийМокшанскийУдмурдскийВодскийВепсскийАлтайскийЧувашскийКумыкскийТуркменскийУйгурскийУрумскийЭвенкийскийБашкирскийБаскский
Стенд-планшет «Асинхронный двигатель с фазным ротором» СП-ЭД-АДФР
Состав:
1. ПЛАНШЕТ — разрез «Асинхронный двигатель с с фазным ротором» (схема, характеристики, разрез натуральных деталей и элементов Асинхронног двигателя с с фазным ротором). Планшет выполнен из фанеры толщиной 18 мм, окрашенной акриловой краской, лицевая панель — из анодированного алюминия со специализированным долговременным нанесением цветного изображения высокой четкости путем цифровой печати и последующей термической обработкой поверхности.
ПЛАНШЕТ — разрез «Асинхронный двигатель с с фазным ротором» (схема, характеристики, разрез натуральных деталей и элементов Асинхронног двигателя с с фазным ротором). Планшет выполнен из фанеры толщиной 18 мм, окрашенной акриловой краской, лицевая панель — из анодированного алюминия со специализированным долговременным нанесением цветного изображения высокой четкости путем цифровой печати и последующей термической обработкой поверхности.
На лицевой панели планшета размещены изображения типовых схем подключения двигателей, изображения принципов работы и конструкции, а так же установлены разрезы натуральных деталей и функциональных элементов реального Асинхронного двигателя с с фазным ротором.
2.МОДУЛЬ эмитации работы и ввода неисправностей «с фазным ротором» — блок с встроенной платой на безе микроконтроллера, который благодаря светодиодам наглядно визуализирует принцип работы Асинхронног двигателя с с фазным ротором. 3.Методические указания.
4. Технический паспорт
Технические характеристики планшета:
— Габаритные размеры (ШхВхД): 620х400х420 мм
— Температура эксплуатации: в диапазоне 5…40 °C.
Технические характеристики модуля имитации работы и диагностики неисправностей:
— Габаритные размеры (ШхВхД): 300х70х200 мм.
— Напряжение питания 220 вольт переменного тока
— Максимальная потребляемая мощность – 50 Вт
— Температура эксплуатации: в диапазоне 5…40 °C.
Компания ООО «Денар-проф» готова предложить своим клиентам, произвести и поставить учебные стенды по электротехнике и энергетике для ВПО, СПО, НПО.
Мы готовы как к осуществлению поставки оборудования, так и к полному формированию проекта, подготовке всей необходимой документации и укомплектованию лабораторию «под ключ». Наша компания на практике подтверждает свою мобильность и надежность. Качество учебных и лабораторных стендов находится на высоком уровне, вся продукция проходит ОТК.
 Оборудование производится в нужные для Вас сроки и по доступной цене.
Оборудование производится в нужные для Вас сроки и по доступной цене.
Нашими клиентами уже стали сотни университетов, техникумов, колледжей и училищ по всей России и странам ближнего зарубежья.
Надеемся на плодотворное сотрудничество!Асинхронные двигатели — Docsity
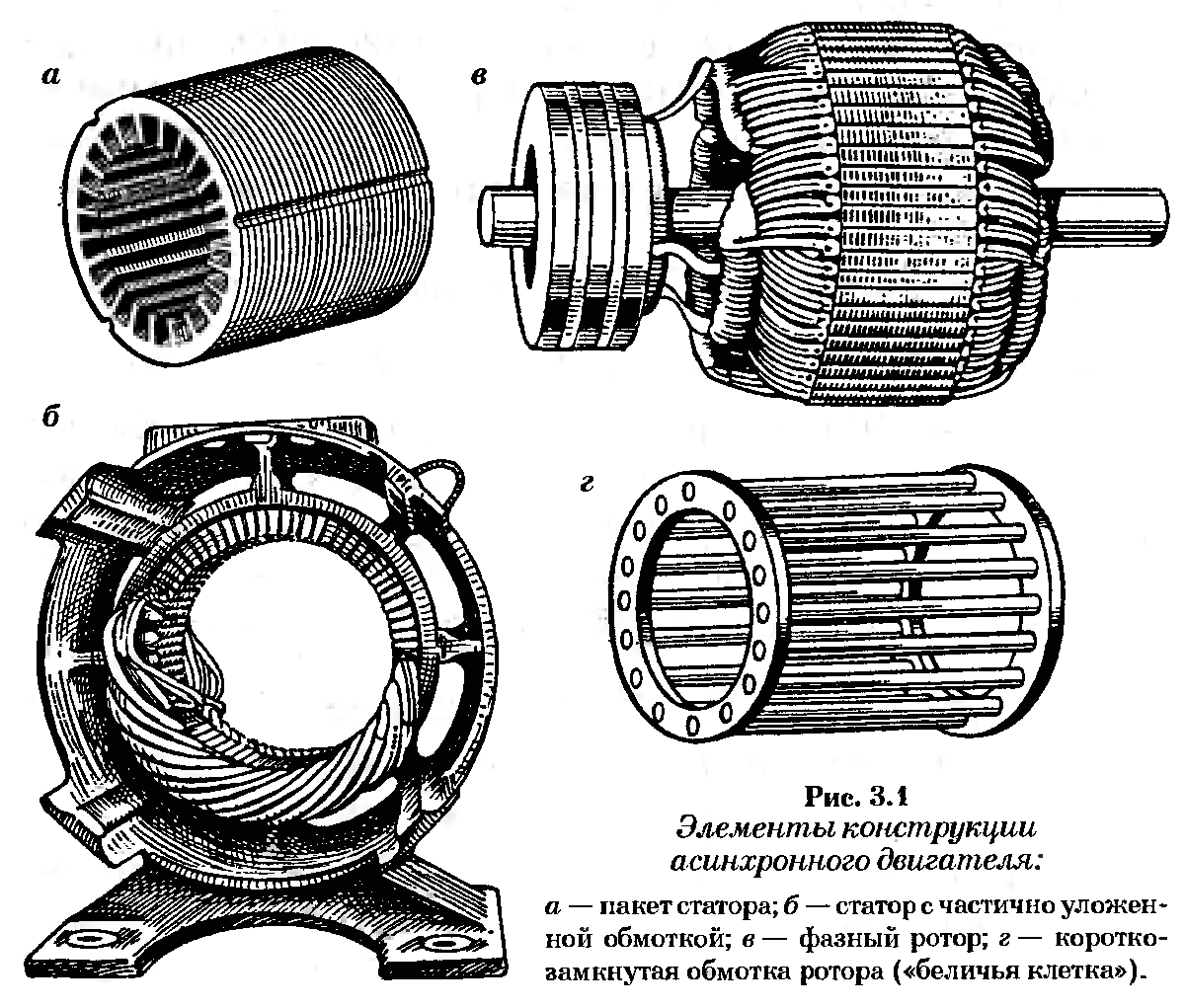
Введение Асинхронные электрические двигатели бывают двух видов – с фазным ротором или с короткозамкнутым ротором. Основными элементами, обеспечивающими работу асинхронного электродвигателя, являются статор и ротор. Ротором называется подвижный элемент асинхронного двигателя, выполненный в форме цилиндра. Принцип действия асинхронных двигателей основан на двух явлениях: образовании рабочего вращающегося магнитного поля токами в обмотке статора и воздействии этого поля на токи, индуцированные в короткозамкнутых витках ротора. Фазный ротор отличает от короткозамкнутого присутствие в его конструкции специальной обмотки с выводом на контактные кольца. Он обладает отличными регулировочными свойствами, а также обеспечивает облегченную и более мощную процедуру пуска. Такой механизм способствует образованию большого начального вращающегося момента. Рассматриваемая в работе разновидность асинхронного электродвигателя может использоваться в ответственных конструкциях благодаря своей повышенной надежности – она способна переносить кратковременные перегрузки и имеет постоянную скорость при изменениях интенсивности нагрузки. Двигатель с фазным ротором характеризуется меньшим пусковым током и может использоваться с автоматическими системами запуска. В настоящее время, на долю асинхронных двигателей, в том числе и трехфазные асинхронные двигатели с фазным ротором, приходится не менее 80% всех электродвигателей, выпускаемых промышленностью. Широкое распространение трехфазных асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании. 1 Общие данные об асинхронных двигателях с фазным ротором 1 1.1 Назначение Асинхронный двигатель с фазным ротором применяют для привода таких машин и механизмов, которые пускаются в ход под нагрузкой.
Такой механизм способствует образованию большого начального вращающегося момента. Рассматриваемая в работе разновидность асинхронного электродвигателя может использоваться в ответственных конструкциях благодаря своей повышенной надежности – она способна переносить кратковременные перегрузки и имеет постоянную скорость при изменениях интенсивности нагрузки. Двигатель с фазным ротором характеризуется меньшим пусковым током и может использоваться с автоматическими системами запуска. В настоящее время, на долю асинхронных двигателей, в том числе и трехфазные асинхронные двигатели с фазным ротором, приходится не менее 80% всех электродвигателей, выпускаемых промышленностью. Широкое распространение трехфазных асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании. 1 Общие данные об асинхронных двигателях с фазным ротором 1 1.1 Назначение Асинхронный двигатель с фазным ротором применяют для привода таких машин и механизмов, которые пускаются в ход под нагрузкой. В подобных приводах двигатель должен развивать при пуске максимальный момент, что достигается с помощью пускового реостата (более подробно устройство асинхронного двигателя с фазным ротором рассмотрено в пункте 1.2). Трехфазные асинхронные электродвигатели широко используются в устройствах автоматики и телемеханики, бытовых и медицинских приборах, устройствах звукозаписи и т.п. Благодаря особенностям своей конструкции электродвигатель с фазным ротором является оптимальной машиной энергообеспечения для подъемных устройств – лифтов, кранов, эскалаторов и т.д. При строительстве и оборудовании таких ответственных конструкций, как скважинные насосы выбирают именно асинхронный двигатель с фазным ротором. Специалисты рекомендуют отдавать предпочтение фазным роторам при оборудовании двигателей конвейеров, подъемников, крановых конструкций, различных промышленных мельниц (угольных, цементных и т.д.), вентиляционных систем, а также технических средств, рассчитанным на длительное время непрерывной работы.
В подобных приводах двигатель должен развивать при пуске максимальный момент, что достигается с помощью пускового реостата (более подробно устройство асинхронного двигателя с фазным ротором рассмотрено в пункте 1.2). Трехфазные асинхронные электродвигатели широко используются в устройствах автоматики и телемеханики, бытовых и медицинских приборах, устройствах звукозаписи и т.п. Благодаря особенностям своей конструкции электродвигатель с фазным ротором является оптимальной машиной энергообеспечения для подъемных устройств – лифтов, кранов, эскалаторов и т.д. При строительстве и оборудовании таких ответственных конструкций, как скважинные насосы выбирают именно асинхронный двигатель с фазным ротором. Специалисты рекомендуют отдавать предпочтение фазным роторам при оборудовании двигателей конвейеров, подъемников, крановых конструкций, различных промышленных мельниц (угольных, цементных и т.д.), вентиляционных систем, а также технических средств, рассчитанным на длительное время непрерывной работы.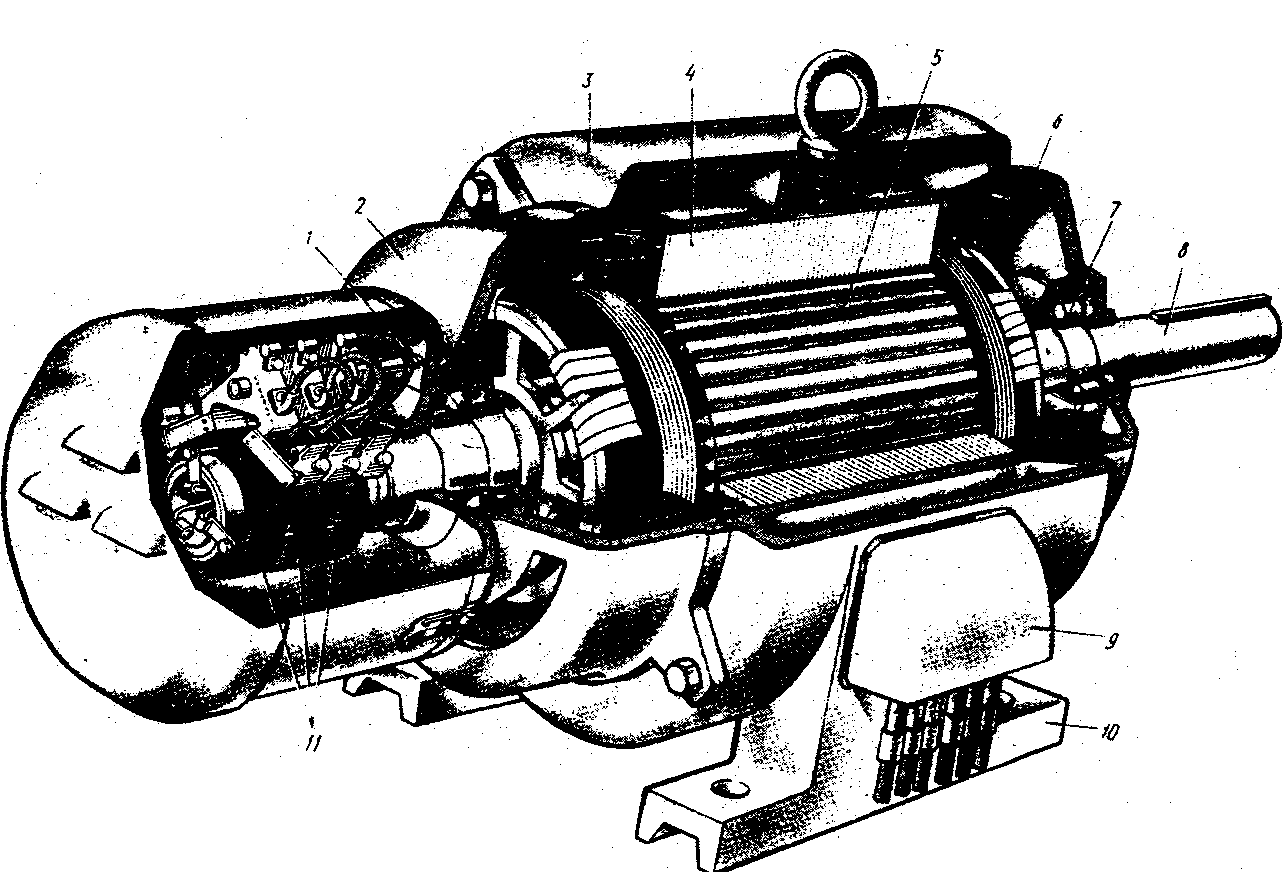 1.2 Вид, устройство и принцип работы 2 . Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим магнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т. е. несинхронный. Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: . Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуктируется, ток ротора и электромагнитный момент машины равны нулю.
1.2 Вид, устройство и принцип работы 2 . Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим магнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т. е. несинхронный. Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: . Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуктируется, ток ротора и электромагнитный момент машины равны нулю. При пуске ротор в первый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме изменяется от s=1 при пуске до s=0 в режиме идеального холостого хода. При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поли (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом, в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷–∞) режимы и режим 5 противовключення (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей. 1.3 Технические характеристики Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 3, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98–92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %).
При пуске ротор в первый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме изменяется от s=1 при пуске до s=0 в режиме идеального холостого хода. При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поли (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом, в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷–∞) режимы и режим 5 противовключення (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей. 1.3 Технические характеристики Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 3, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98–92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая Рисунок 3 – Механические характеристики асинхронного двигателя: а – естественная; б – при включении пускового реостатаРис. 262. Механические характеристики асинхронного двигателя: а – естественная; б – при включении пускового реостата На рис. 3, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до 6 наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой. Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10–20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном – его пусковые свойства. Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем.
Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая Рисунок 3 – Механические характеристики асинхронного двигателя: а – естественная; б – при включении пускового реостатаРис. 262. Механические характеристики асинхронного двигателя: а – естественная; б – при включении пускового реостата На рис. 3, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до 6 наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой. Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10–20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном – его пусковые свойства. Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5–7 раз больше номинального, и они могут сгореть. При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 3,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5–7 раз больше номинального, и они могут сгореть. При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 3,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax. В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых 7 При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25–0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках 2. Техническое обслуживание асинхронного двигателя с фазным ротором Асинхронные электродвигатели с фазным ротором отличаются очень высокой надежностью, высокой бесперебойностью своей работы (при соблюдении допустимой продолжительности включения). Однако, это не означает, что асинхронные электродвигатели являются вечными. Поэтому на каждом предприятии рекомендуется составить график проведения технического обслуживания асинхронных двигателей. Перечень работ при ТО асинхронных двигателей может быть таким: Техническое обслуживание асинхронного электродвигателя следует начинать с его подробного внешнего осмотра.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых 7 При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25–0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках 2. Техническое обслуживание асинхронного двигателя с фазным ротором Асинхронные электродвигатели с фазным ротором отличаются очень высокой надежностью, высокой бесперебойностью своей работы (при соблюдении допустимой продолжительности включения). Однако, это не означает, что асинхронные электродвигатели являются вечными. Поэтому на каждом предприятии рекомендуется составить график проведения технического обслуживания асинхронных двигателей. Перечень работ при ТО асинхронных двигателей может быть таким: Техническое обслуживание асинхронного электродвигателя следует начинать с его подробного внешнего осмотра. В первую очередь определяется наличие очевидных неисправностей. Корпус двигателя следует очистить от грязи и пыли при помощи стальной щетки. Он не должен иметь сколов и повреждений. Из–за вибраций и динамических нагрузок, а также при неровностях и дефектах монтажной площадки, нередко случается, что одна из монтажных «лап» откалывается. Такой двигатель выбраковывается и не допускается к дальнейшей эксплуатации. В обязательном порядке следует проверить наличие крышки клеммной коробки, а также крышки, закрывающей роторные выводы у двигателей с 10 фазным ротором. Эти крышки должны закрываться плотно, без зазоров. Их смятия и повреждения не допускаются. Каждый асинхронный электродвигатель должен иметь на корпусе шильдик – табличку с информацией о номинальных параметрах. Необходимо контролировать читаемость всех надписей на шильдике и, при необходимости, восстанавливать их, чтобы не иметь в хозяйстве «неопознанных» электродвигателей. Внешний осмотр состояния механической частиПри выполнении технического обслуживания двигатель необходимо отсоединить от трансмиссии: снять приводной ремень, цепь или полумуфту.
В первую очередь определяется наличие очевидных неисправностей. Корпус двигателя следует очистить от грязи и пыли при помощи стальной щетки. Он не должен иметь сколов и повреждений. Из–за вибраций и динамических нагрузок, а также при неровностях и дефектах монтажной площадки, нередко случается, что одна из монтажных «лап» откалывается. Такой двигатель выбраковывается и не допускается к дальнейшей эксплуатации. В обязательном порядке следует проверить наличие крышки клеммной коробки, а также крышки, закрывающей роторные выводы у двигателей с 10 фазным ротором. Эти крышки должны закрываться плотно, без зазоров. Их смятия и повреждения не допускаются. Каждый асинхронный электродвигатель должен иметь на корпусе шильдик – табличку с информацией о номинальных параметрах. Необходимо контролировать читаемость всех надписей на шильдике и, при необходимости, восстанавливать их, чтобы не иметь в хозяйстве «неопознанных» электродвигателей. Внешний осмотр состояния механической частиПри выполнении технического обслуживания двигатель необходимо отсоединить от трансмиссии: снять приводной ремень, цепь или полумуфту. После этого следует провернуть вал вручную. Он должен проворачиваться с усилием, обусловленным только инерцией ротора, посторонние звуки, скрежет и хруст должны отсутствовать. Следует вскрыть кожух, скрывающий крыльчатку двигателя (при закрытом исполнении). Крыльчатка не должна болтаться, иметь люфты в любом направлении, стопорный винт должен быть затянут. Вал двигателя не должен перемещаться в радиальном и осевом направлениях, а звездочка или шкив на валу должны быть закреплены надежно и не болтаться. Все болтовые соединения должны быть протянуты, а резьба не должна быть сорвана. Дефектные детали и элементы крепежа подлежат замене. Далее необходимо вскрыть крышки подшипниковых узлов. Состояние подшипников и подшипниковых гнезд определяется визуально. Исключаются трещины, сколы колец подшипника, неправильное его положение относительно вала (перекос). Перед закрытием подшипниковый узел набивается смазкой (маслом или специальной консистентной смазкой). Контроль наличия и состояния смазки в подшипниковых узлах вообще рекомендуется производить ежесменно.
После этого следует провернуть вал вручную. Он должен проворачиваться с усилием, обусловленным только инерцией ротора, посторонние звуки, скрежет и хруст должны отсутствовать. Следует вскрыть кожух, скрывающий крыльчатку двигателя (при закрытом исполнении). Крыльчатка не должна болтаться, иметь люфты в любом направлении, стопорный винт должен быть затянут. Вал двигателя не должен перемещаться в радиальном и осевом направлениях, а звездочка или шкив на валу должны быть закреплены надежно и не болтаться. Все болтовые соединения должны быть протянуты, а резьба не должна быть сорвана. Дефектные детали и элементы крепежа подлежат замене. Далее необходимо вскрыть крышки подшипниковых узлов. Состояние подшипников и подшипниковых гнезд определяется визуально. Исключаются трещины, сколы колец подшипника, неправильное его положение относительно вала (перекос). Перед закрытием подшипниковый узел набивается смазкой (маслом или специальной консистентной смазкой). Контроль наличия и состояния смазки в подшипниковых узлах вообще рекомендуется производить ежесменно. Для оценки состояния статорных выводов и токосъемного устройства ротора, крышки двигателя вскрываются. Изоляция статорных выводов должна иметь быть целой, без трещин и повреждений, в противном случае 11 изоляцию необходимо восстановить при помощи изоленты и киперной ленты. Клеммная колодка, при ее наличии, не должна быть оплавлена или повреждена – в противном случае она подлежит замене. Наконечники статорных выводов могут быть окислены или иметь на поверхности нагар – это признак плохого электрического контакта. При наличии подобных дефектов наконечники следует зачистить до металла и вновь соединить обмотки по необходимой схеме. Полость клеммной коробки двигателя следует аккуратно очистить от пыли и грязи. Остаточная величина токосъемных роторных щеток двигателей с фазным ротором должна быть не менее 4 мм. Их контактная поверхность должна быть ровной и плотно прилегать к токосъемному кольцу. Сколы и трещины на щетках исключаются. Дефектные щетки подлежат замене. Перед установкой они шлифуются под поверхность токосъемного кольца при помощи стеклянной бумаги.
Для оценки состояния статорных выводов и токосъемного устройства ротора, крышки двигателя вскрываются. Изоляция статорных выводов должна иметь быть целой, без трещин и повреждений, в противном случае 11 изоляцию необходимо восстановить при помощи изоленты и киперной ленты. Клеммная колодка, при ее наличии, не должна быть оплавлена или повреждена – в противном случае она подлежит замене. Наконечники статорных выводов могут быть окислены или иметь на поверхности нагар – это признак плохого электрического контакта. При наличии подобных дефектов наконечники следует зачистить до металла и вновь соединить обмотки по необходимой схеме. Полость клеммной коробки двигателя следует аккуратно очистить от пыли и грязи. Остаточная величина токосъемных роторных щеток двигателей с фазным ротором должна быть не менее 4 мм. Их контактная поверхность должна быть ровной и плотно прилегать к токосъемному кольцу. Сколы и трещины на щетках исключаются. Дефектные щетки подлежат замене. Перед установкой они шлифуются под поверхность токосъемного кольца при помощи стеклянной бумаги.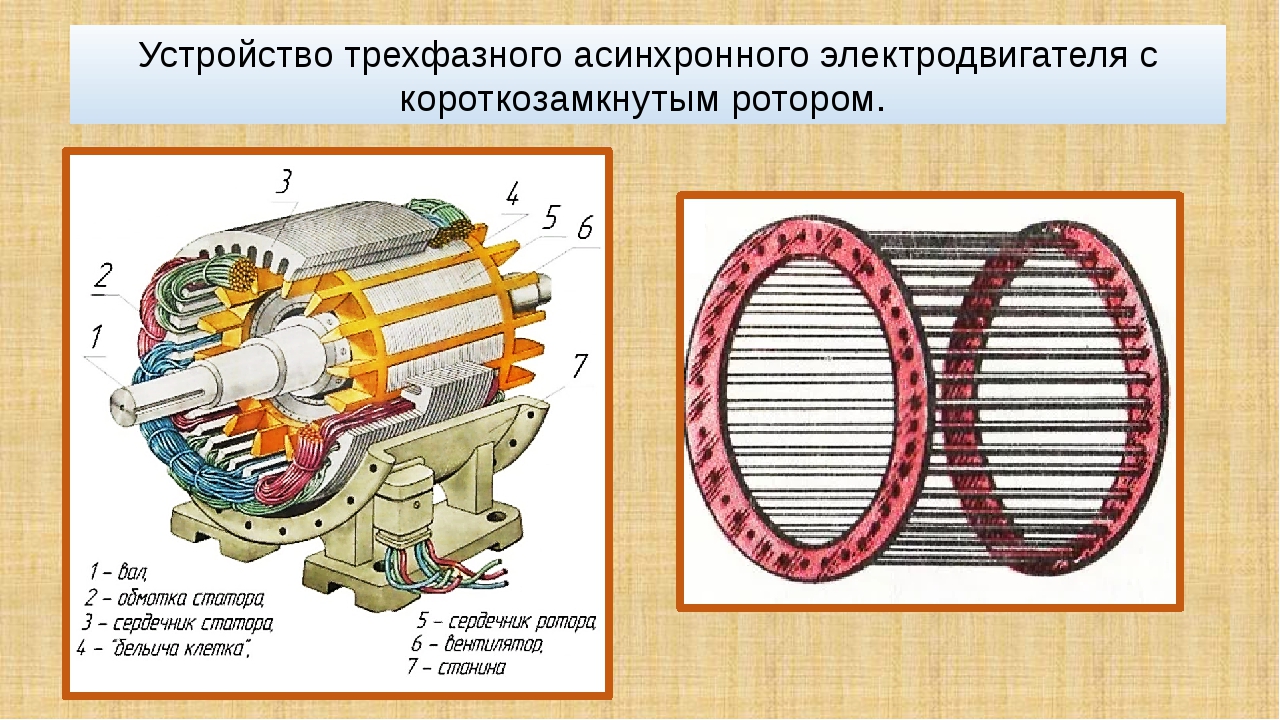 Внешний осмотр состояния электрической частиТокосъемные кольца следует очистить от пыли и грязи при помощи ветоши, смоченной в керосине. Задиры, повреждения токосъемных колец не допускаются. Причиной возникновения таких дефектов может быть не замеченный вовремя предельный износ щеток. Напоследок необходимо проконтролировать состояние заземляющего проводника электродвигателя. Его жилы должны быть целыми, без повреждений, а болтовые крепления наконечников должны быть надежно затянуты. Измерения и испытания На данном этапе при помощи мегомметра проверяется сопротивление изоляции статорных обмоток, а для двигателей с фазным ротором – и обмоток ротора. Электрическое сопротивление статорных обмоток проверяется относительно корпуса двигателя, а сопротивление обмоток ротора – относительно рабочего вала. При рабочей температуре нормальным считается сопротивление изоляции обмоток 0,5 Мом или более. На практике же 12 фазным ротором. При большом сопротивлении в цепи ротора возрастает скольжение двигателя и уменьшается скорость его вращения.
Внешний осмотр состояния электрической частиТокосъемные кольца следует очистить от пыли и грязи при помощи ветоши, смоченной в керосине. Задиры, повреждения токосъемных колец не допускаются. Причиной возникновения таких дефектов может быть не замеченный вовремя предельный износ щеток. Напоследок необходимо проконтролировать состояние заземляющего проводника электродвигателя. Его жилы должны быть целыми, без повреждений, а болтовые крепления наконечников должны быть надежно затянуты. Измерения и испытания На данном этапе при помощи мегомметра проверяется сопротивление изоляции статорных обмоток, а для двигателей с фазным ротором – и обмоток ротора. Электрическое сопротивление статорных обмоток проверяется относительно корпуса двигателя, а сопротивление обмоток ротора – относительно рабочего вала. При рабочей температуре нормальным считается сопротивление изоляции обмоток 0,5 Мом или более. На практике же 12 фазным ротором. При большом сопротивлении в цепи ротора возрастает скольжение двигателя и уменьшается скорость его вращения.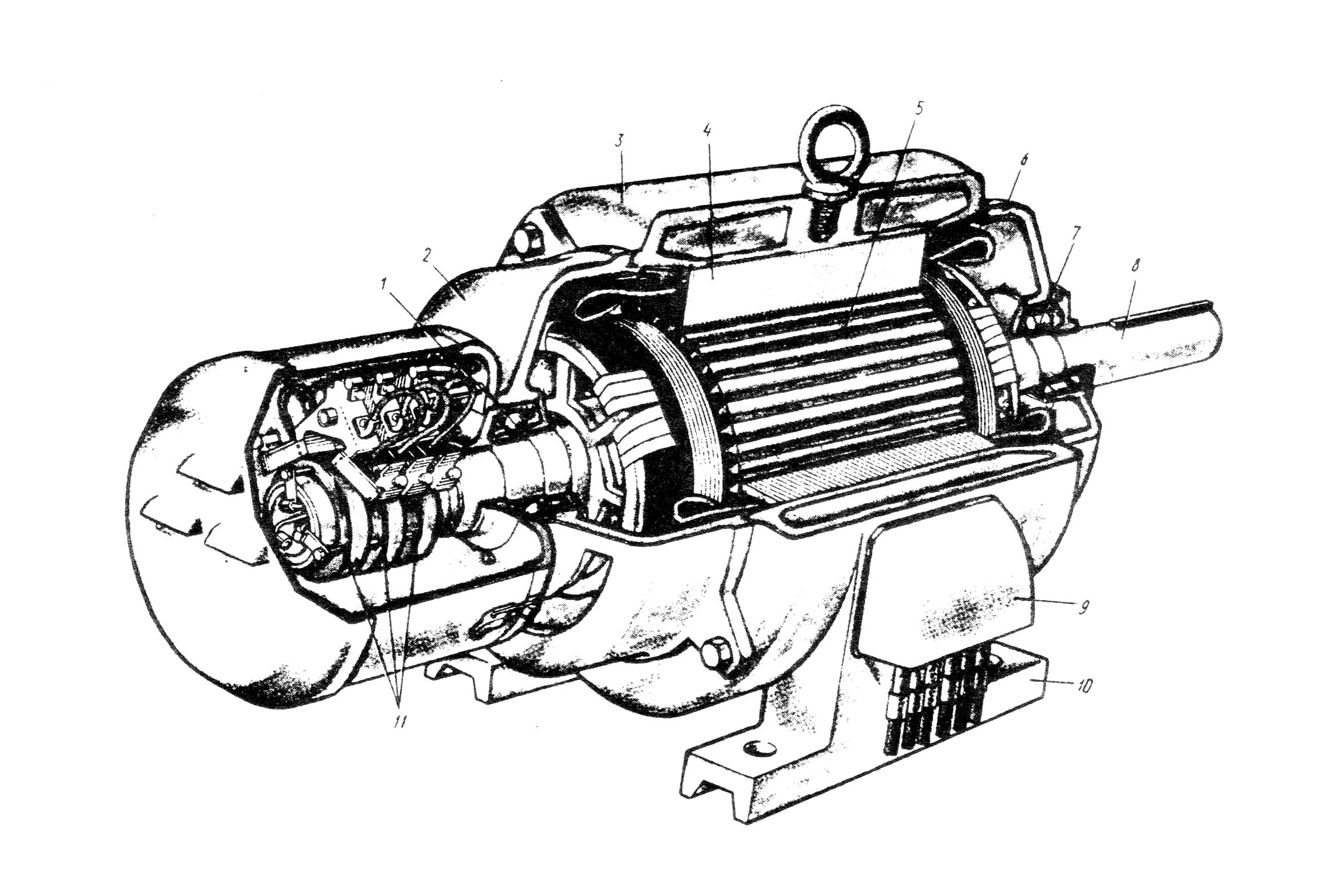 Сопротивление в цепи ротора увеличивают плохие контакты в щеточном устройстве ротора, пусковом реостате, соединениях обмотки с контактными кольцами, пайках лобовых частей обмотки, а также недостаточное сечение кабелей и проводов между контактными кольцами и пусковым реостатом. Плохие контакты в обмотке ротора можно выявить, если в статор двигателя подать напряжение, равное 20–25% номинального. Заторможенный ротор медленно поворачивают вручную и проверяют силу тока во всех трех фазах статора. Если ротор исправен, то при всех его положениях сила тока в статоре одинакова, а при обрыве или плохом контакте будет изменяться в зависимости от положения ротора. Плохие контакты в пайках лобовых частей обмотки фазного ротора определяют методом падения напряжения. Метод основан на увеличении падения напряжения в местах недоброкачественной пайки. При этом замеряют величины падения напряжения во всех местах соединений, после чего результаты измерений сравнивают. Пайки считаются удовлетворительными, если падение напряжения в них превышает падение напряжения в пайках с минимальными показателями не более чем на 10%.
Сопротивление в цепи ротора увеличивают плохие контакты в щеточном устройстве ротора, пусковом реостате, соединениях обмотки с контактными кольцами, пайках лобовых частей обмотки, а также недостаточное сечение кабелей и проводов между контактными кольцами и пусковым реостатом. Плохие контакты в обмотке ротора можно выявить, если в статор двигателя подать напряжение, равное 20–25% номинального. Заторможенный ротор медленно поворачивают вручную и проверяют силу тока во всех трех фазах статора. Если ротор исправен, то при всех его положениях сила тока в статоре одинакова, а при обрыве или плохом контакте будет изменяться в зависимости от положения ротора. Плохие контакты в пайках лобовых частей обмотки фазного ротора определяют методом падения напряжения. Метод основан на увеличении падения напряжения в местах недоброкачественной пайки. При этом замеряют величины падения напряжения во всех местах соединений, после чего результаты измерений сравнивают. Пайки считаются удовлетворительными, если падение напряжения в них превышает падение напряжения в пайках с минимальными показателями не более чем на 10%. У роторов с глубокими пазами может также происходить разрыв стержней из–за механических перенапряжений материала. Разрыв стержней в пазовой части короткозамкнутого ротора определяют следующим образом. Ротор выдвигают из статора и в зазор между ними забивают несколько деревянных клиньев, чтобы ротор не мог повернуться. К статору подводят пониженное напряжение не более 0,25 Uном. На каждый паз выступающей части ротора поочередно накладывают стальную пластину, которая должна перекрывать два зубца ротора. Если стержни целые, пластина будет притягиваться к ротору и дребезжать. При наличии разрыва притяжение и дребезжание пластины исчезают. 15 Двигатель разворачивается при разомкнутой цепи фазного ротора. Причина неисправности – короткое замыкание в обмотке ротора. При включении двигатель медленно разворачивается, а его обмотки сильно нагреваются, так как в замкнутых накоротко витках вращающимся полем статора наводится ток большой величины. Короткие замыкания возникают между хомутиками лобовых частей, а также между стержнями при пробое или ослаблении изоляции в обмотке ротора.
У роторов с глубокими пазами может также происходить разрыв стержней из–за механических перенапряжений материала. Разрыв стержней в пазовой части короткозамкнутого ротора определяют следующим образом. Ротор выдвигают из статора и в зазор между ними забивают несколько деревянных клиньев, чтобы ротор не мог повернуться. К статору подводят пониженное напряжение не более 0,25 Uном. На каждый паз выступающей части ротора поочередно накладывают стальную пластину, которая должна перекрывать два зубца ротора. Если стержни целые, пластина будет притягиваться к ротору и дребезжать. При наличии разрыва притяжение и дребезжание пластины исчезают. 15 Двигатель разворачивается при разомкнутой цепи фазного ротора. Причина неисправности – короткое замыкание в обмотке ротора. При включении двигатель медленно разворачивается, а его обмотки сильно нагреваются, так как в замкнутых накоротко витках вращающимся полем статора наводится ток большой величины. Короткие замыкания возникают между хомутиками лобовых частей, а также между стержнями при пробое или ослаблении изоляции в обмотке ротора.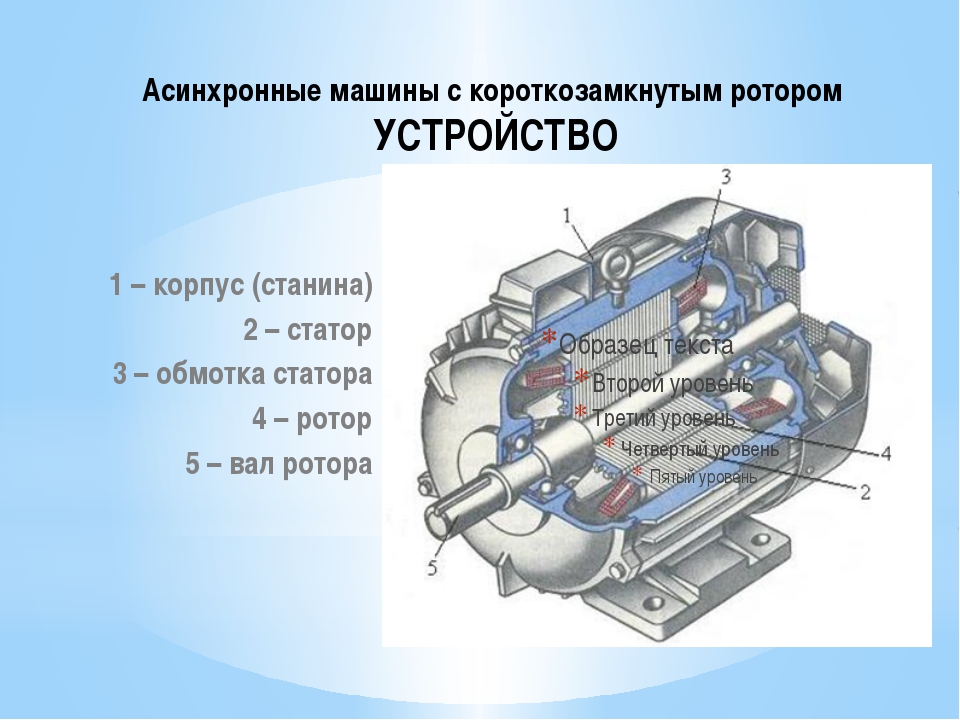 Это повреждение определяют тщательным внешним осмотром и измерением сопротивления изоляции обмотки ротора. Если при осмотре не удается обнаружить повреждение, то его определяют по неравномерному нагреву обмотки ротора на ощупь, для чего ротор затормаживают, а к статору подводят пониженное напряжение. Равномерный нагрев всего двигателя выше допустимой нормы может получиться в результате длительной перегрузки и ухудшения условий охлаждения. Повышенный нагрев вызывает преждевременный износ изоляции обмоток. Местный нагрев обмотки статора, который обычно сопровождается сильным гудением, уменьшением скорости вращения двигателя и неравномерными токами в его фазах, а также запахом перегретой изоляции. Эта неисправность может возникнуть в результате неправильного соединения между собой катушек в одной из фаз, замыкания обмотки на корпус в двух местах, замыкания между двумя фазами, короткого замыкания между витками в одной из фаз обмотки статора. При замыканиях в обмотках двигателя вращающимся магнитным полем в короткозамкнутом контуре будет наводиться э.
Это повреждение определяют тщательным внешним осмотром и измерением сопротивления изоляции обмотки ротора. Если при осмотре не удается обнаружить повреждение, то его определяют по неравномерному нагреву обмотки ротора на ощупь, для чего ротор затормаживают, а к статору подводят пониженное напряжение. Равномерный нагрев всего двигателя выше допустимой нормы может получиться в результате длительной перегрузки и ухудшения условий охлаждения. Повышенный нагрев вызывает преждевременный износ изоляции обмоток. Местный нагрев обмотки статора, который обычно сопровождается сильным гудением, уменьшением скорости вращения двигателя и неравномерными токами в его фазах, а также запахом перегретой изоляции. Эта неисправность может возникнуть в результате неправильного соединения между собой катушек в одной из фаз, замыкания обмотки на корпус в двух местах, замыкания между двумя фазами, короткого замыкания между витками в одной из фаз обмотки статора. При замыканиях в обмотках двигателя вращающимся магнитным полем в короткозамкнутом контуре будет наводиться э.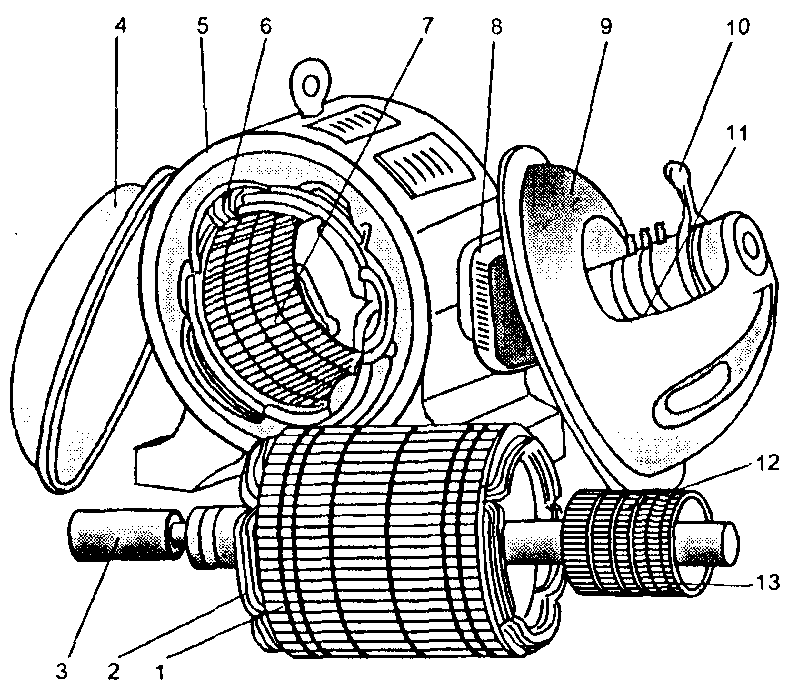 д. с, которая создаст ток большой величины, зависящий от сопротивления замкнутого контура. Поврежденная обмотка может быть найдена по величине измеренного сопротивления, при этом поврежденная фаза будет иметь меньшее сопротивление, чем исправные. Сопротивление измеряют мостом или методом амперметра – вольтметра. Поврежденную фазу можно также 16 определить методом измерения тока в фазах, если к двигателю подвести пониженное напряжение. При соединении обмоток в звезду ток в поврежденной фазе будет больше, чем в других. Если обмотки соединены в треугольник, линейный ток в двух проводах, к которым присоединена поврежденная фаза, будет больше, чем в третьем проводе. При определении указанного повреждения у двигателя с короткозамкнутым ротором последний может быть заторможенным или вращаться, а у двигателей с фазным ротором обмотка ротора может быть разомкнута. Поврежденные катушки определяют по падению напряжения на их концах: на поврежденных катушках падение напряжения будет меньше, чем на исправных.
д. с, которая создаст ток большой величины, зависящий от сопротивления замкнутого контура. Поврежденная обмотка может быть найдена по величине измеренного сопротивления, при этом поврежденная фаза будет иметь меньшее сопротивление, чем исправные. Сопротивление измеряют мостом или методом амперметра – вольтметра. Поврежденную фазу можно также 16 определить методом измерения тока в фазах, если к двигателю подвести пониженное напряжение. При соединении обмоток в звезду ток в поврежденной фазе будет больше, чем в других. Если обмотки соединены в треугольник, линейный ток в двух проводах, к которым присоединена поврежденная фаза, будет больше, чем в третьем проводе. При определении указанного повреждения у двигателя с короткозамкнутым ротором последний может быть заторможенным или вращаться, а у двигателей с фазным ротором обмотка ротора может быть разомкнута. Поврежденные катушки определяют по падению напряжения на их концах: на поврежденных катушках падение напряжения будет меньше, чем на исправных.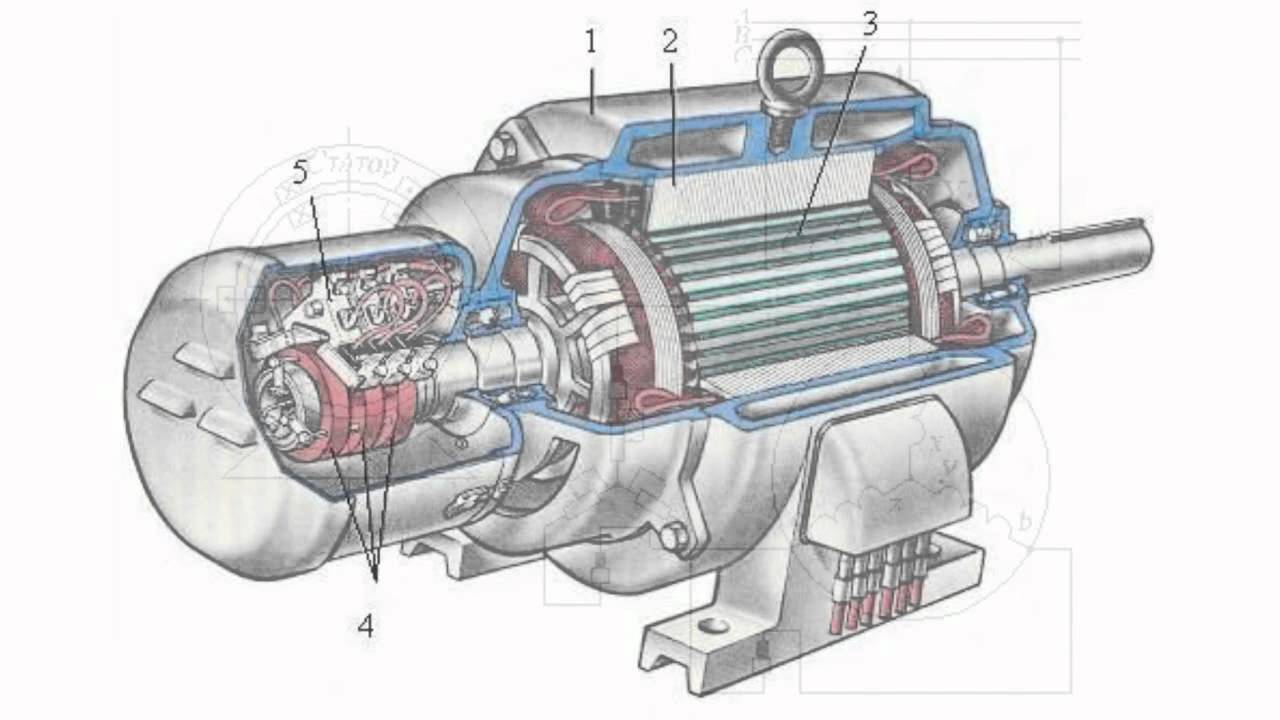 Местный нагрев активной стали статора происходит из–за выгорания и оплавления стали при коротких замыканиях в обмотке статора, а также при замыкании листов стали вследствие задевания ротора о статор во время работы двигателя или вследствие разрушения изоляции между отдельными листами стали. Признаками задевания ротора о статор являются дым, искры и запах гари; активная сталь в местах задевания приобретает вид полированной поверхности; появляется гудение, сопровождающееся вибрацией двигателя. Причиной задевания служит нарушение нормального зазора между ротором и статором в результате износа подшипников, неправильной их установки, большого изгиб вала, деформации стали статора или ротора, одностороннего притяжения ротора к статору из–за витковых замыканий в обмотке статора, сильной вибрации ро–тора, который определяют щупом. Ненормальный шум в двигателе. Нормально работающий двигатель издает равномерное гудение, которое характерно для всех машин переменного тока. Возрастание гудения и появление в двигателе ненормальных шумов могут явиться следствием ослабления запрессовки активной стали, пакеты которой будут периодически сжиматься и ослабляться под воздействием магнитного потока.
Местный нагрев активной стали статора происходит из–за выгорания и оплавления стали при коротких замыканиях в обмотке статора, а также при замыкании листов стали вследствие задевания ротора о статор во время работы двигателя или вследствие разрушения изоляции между отдельными листами стали. Признаками задевания ротора о статор являются дым, искры и запах гари; активная сталь в местах задевания приобретает вид полированной поверхности; появляется гудение, сопровождающееся вибрацией двигателя. Причиной задевания служит нарушение нормального зазора между ротором и статором в результате износа подшипников, неправильной их установки, большого изгиб вала, деформации стали статора или ротора, одностороннего притяжения ротора к статору из–за витковых замыканий в обмотке статора, сильной вибрации ро–тора, который определяют щупом. Ненормальный шум в двигателе. Нормально работающий двигатель издает равномерное гудение, которое характерно для всех машин переменного тока. Возрастание гудения и появление в двигателе ненормальных шумов могут явиться следствием ослабления запрессовки активной стали, пакеты которой будут периодически сжиматься и ослабляться под воздействием магнитного потока. Для устранения дефекта необходимо перепрессовать пакеты стали. Сильное гудение и шумы в машине 17 В некоторых случаях короткозамкнутую часть обмотки электродвигателя можно сразу определить по внешнему виду – по обуглившейся изоляции. Следует иметь в виду, что при наличии параллельных ветвей в обмотке короткое замыкание в одной из ветвей фазы (при значительном числе замкнувшихся витков) может вызвать нагрев и другой ветви, не имеющей короткого замыкания, так как последняя оказывается замкнутой витками дефектной ветви обмотки. Фазу, имеющую замыкание, можно найти по несимметрии потребляемого тока из сети. При соединении обмотки электродвигателя звездой (рис. 6, а) в фазе, имеющей замыкание, ток (A3) будет больше, чем в двух других фазах. При соединении обмотки электродвигателя треугольником (рис. 6, б) в двух фазах сети, к которым присоединена дефектная фаза, токи (А1 и A3) будут больше, чем в третьей фазе (А2). Опыт определения дефектной фазы рекомендуется производить при пониженном напряжении (1/3 – 1/4 номинального), в случае асинхронного двигателя с фазным ротором обмотка последнего может быть разомкнута, а в случае асинхронного двигателя с короткозамкнутым ротором или же в случае синхронного двигателя ротор может вращаться или быть заторможенным.
Для устранения дефекта необходимо перепрессовать пакеты стали. Сильное гудение и шумы в машине 17 В некоторых случаях короткозамкнутую часть обмотки электродвигателя можно сразу определить по внешнему виду – по обуглившейся изоляции. Следует иметь в виду, что при наличии параллельных ветвей в обмотке короткое замыкание в одной из ветвей фазы (при значительном числе замкнувшихся витков) может вызвать нагрев и другой ветви, не имеющей короткого замыкания, так как последняя оказывается замкнутой витками дефектной ветви обмотки. Фазу, имеющую замыкание, можно найти по несимметрии потребляемого тока из сети. При соединении обмотки электродвигателя звездой (рис. 6, а) в фазе, имеющей замыкание, ток (A3) будет больше, чем в двух других фазах. При соединении обмотки электродвигателя треугольником (рис. 6, б) в двух фазах сети, к которым присоединена дефектная фаза, токи (А1 и A3) будут больше, чем в третьей фазе (А2). Опыт определения дефектной фазы рекомендуется производить при пониженном напряжении (1/3 – 1/4 номинального), в случае асинхронного двигателя с фазным ротором обмотка последнего может быть разомкнута, а в случае асинхронного двигателя с короткозамкнутым ротором или же в случае синхронного двигателя ротор может вращаться или быть заторможенным.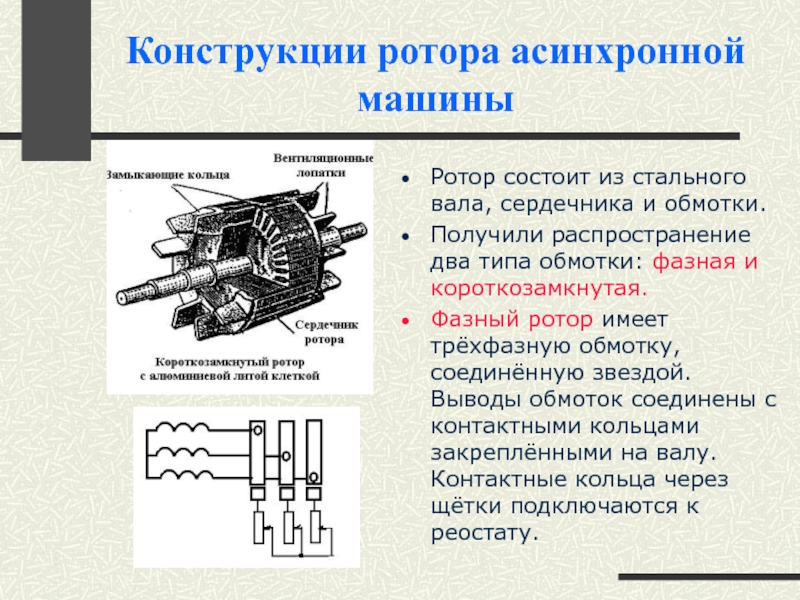 При проведении опыта с синхронным двигателем в неподвижном состоянии его обмотка возбуждения должна быть замкнута накоротко или же на разрядное сопротивление. Как определить место короткого замыкания в обмотках электрических машин переменного тока В опыте с неподвижной синхронной машиной токи в ее фазах будут различаться даже в том случае, если машина исправна, что объясняется магнитной асимметрией ее ротора. При поворачивании ротора эти токи будут изменяться, однако при исправной обмотке пределы их изменений будут одинаковы. Фаза, имеющая замыкание, может быть определена и по значению ее сопротивления постоянному току, измеренного мостом либо по методу 20 амперметра – вольтметра, меньшее сопротивление будет иметь фаза с замыканием. Если же нет возможности разъединить фазы, то производят измерения трех междуфазных сопротивлений. В случае соединения фаз электродвигателя звездой (рис. 6, а) наибольшим будет междуфазное сопротивление, измеренное на концах фаз, не имеющих замыканий, два других сопротивления будут равны между собой и будут меньше первого.
При проведении опыта с синхронным двигателем в неподвижном состоянии его обмотка возбуждения должна быть замкнута накоротко или же на разрядное сопротивление. Как определить место короткого замыкания в обмотках электрических машин переменного тока В опыте с неподвижной синхронной машиной токи в ее фазах будут различаться даже в том случае, если машина исправна, что объясняется магнитной асимметрией ее ротора. При поворачивании ротора эти токи будут изменяться, однако при исправной обмотке пределы их изменений будут одинаковы. Фаза, имеющая замыкание, может быть определена и по значению ее сопротивления постоянному току, измеренного мостом либо по методу 20 амперметра – вольтметра, меньшее сопротивление будет иметь фаза с замыканием. Если же нет возможности разъединить фазы, то производят измерения трех междуфазных сопротивлений. В случае соединения фаз электродвигателя звездой (рис. 6, а) наибольшим будет междуфазное сопротивление, измеренное на концах фаз, не имеющих замыканий, два других сопротивления будут равны между собой и будут меньше первого. В случае соединения фаз электродвигателя треугольником (рис. 6, б) наименьшее сопротивление будет на концах фазы, имеющей замыкание, два других измерения дадут большие значения сопротивления, причем оба они будут одинаковы. Катушечные группы или катушки, имеющие замыкания, могут быть найдены при питании переменным током всей ей обмотки или только дефектной фазы по нагреву или по значению падения напряжения на их концах. Катушечные группы или катушки, имеющие замыкание, будут сильно нагреты и иметь меньшее падение напряжения (при измерении напряжения удобно прльзоваться острыми щупами, которыми прокалывают изоляцию соединительных проводов). В этом случае, так же как и выше, дефектные катушки можно найти по значению сопротивления постоянному току. Замыкания в обмотке генератора могут быть найдены по значению индуктированной ЭДС в фазах обмотки, в ее катушечных группах или в катушках. Для этого генератор пускают в ход, дают ему небольшое возбуждение и производят измерения фазных напряжений; если обмотки соединены треугольником, то фазы следует разъединить.
В случае соединения фаз электродвигателя треугольником (рис. 6, б) наименьшее сопротивление будет на концах фазы, имеющей замыкание, два других измерения дадут большие значения сопротивления, причем оба они будут одинаковы. Катушечные группы или катушки, имеющие замыкания, могут быть найдены при питании переменным током всей ей обмотки или только дефектной фазы по нагреву или по значению падения напряжения на их концах. Катушечные группы или катушки, имеющие замыкание, будут сильно нагреты и иметь меньшее падение напряжения (при измерении напряжения удобно прльзоваться острыми щупами, которыми прокалывают изоляцию соединительных проводов). В этом случае, так же как и выше, дефектные катушки можно найти по значению сопротивления постоянному току. Замыкания в обмотке генератора могут быть найдены по значению индуктированной ЭДС в фазах обмотки, в ее катушечных группах или в катушках. Для этого генератор пускают в ход, дают ему небольшое возбуждение и производят измерения фазных напряжений; если обмотки соединены треугольником, то фазы следует разъединить.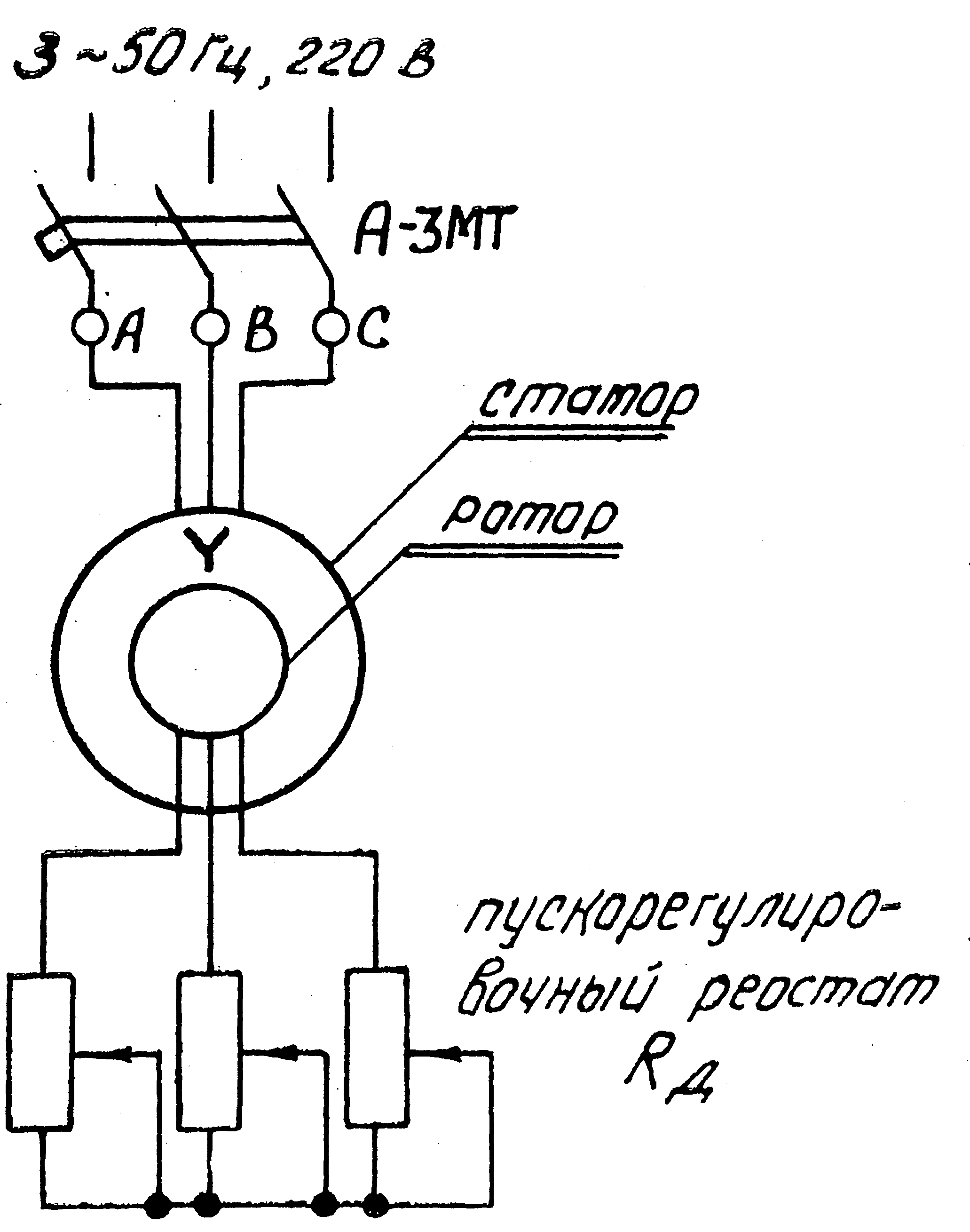 Фаза, имеющая замыкание, будет иметь меньшее напряжение. Для нахождения катушечной группы или катушки, имеющей замыкание, измеряют напряжение на их концах. Для высоковольтной машины опыт можно произвести при остаточном напряжении. В тех случаях, когда необходимо выяснить, имеется ли дефект в статорной или роторной обмотке, поступают следующим образом. Статорную обмотку включают на пониженное напряжение (1/3 – 1/4 номинального) при разомкнутом роторе и измеряют напряжение на кольцах 21 ротора, медленно проворачивая ротор. Если напряжения на кольцах ротора (попарно) не равны между собой и меняются в зависимости от положения ротора по отношению к статору, то это указывает на замыкание в статорной обмотке. При замыкании в роторной обмотке (при исправной статорной) напряжение между кольцами ротора будет неодинаковым и не будет меняться в зависимости от положения ротора. Опыт может быть произведен при питании ротора и измерении напряжения на зажимах статора, при этом получится обратная картина.
Фаза, имеющая замыкание, будет иметь меньшее напряжение. Для нахождения катушечной группы или катушки, имеющей замыкание, измеряют напряжение на их концах. Для высоковольтной машины опыт можно произвести при остаточном напряжении. В тех случаях, когда необходимо выяснить, имеется ли дефект в статорной или роторной обмотке, поступают следующим образом. Статорную обмотку включают на пониженное напряжение (1/3 – 1/4 номинального) при разомкнутом роторе и измеряют напряжение на кольцах 21 ротора, медленно проворачивая ротор. Если напряжения на кольцах ротора (попарно) не равны между собой и меняются в зависимости от положения ротора по отношению к статору, то это указывает на замыкание в статорной обмотке. При замыкании в роторной обмотке (при исправной статорной) напряжение между кольцами ротора будет неодинаковым и не будет меняться в зависимости от положения ротора. Опыт может быть произведен при питании ротора и измерении напряжения на зажимах статора, при этом получится обратная картина.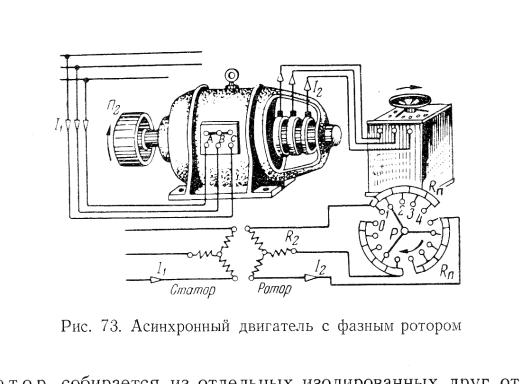 Подводимое к ротору напряжение должно составлять 1/3 – 1/4 номинального напряжения на кольцах ротора, т. е. напряжения на кольцах при неподвижном роторе и статоре, включенном на номинальное напряжение. После того как установлено, какая из обмоток (роторная или статорная) имеет соединение между витками, определяют дефектную фазу, катушечную группу или катушку рассмотренными выше способами. В сложных случаях (при замыкании большого числа катушек) или когда короткозамкнутую ветвь по каким–либо причинам не удается выявить, прибегают к методу деления обмотки на части. Для этого обмотку делят сначала пополам и проверяют мегомметром соединение между собой этих частей. Затем одну из этих частей делят снова на две части и каждую из них проверяют на соединение с первой половиной и так далее до тех пор, пока не будут найдены катушки, имеющие соединение. Для наглядности на рис. 7 схематически представлен этот способ нахождения дефекта в фазе, имеющей восемь катушечных групп, при наличии соединения между катушками 2 и 6 катушечных групп.
Подводимое к ротору напряжение должно составлять 1/3 – 1/4 номинального напряжения на кольцах ротора, т. е. напряжения на кольцах при неподвижном роторе и статоре, включенном на номинальное напряжение. После того как установлено, какая из обмоток (роторная или статорная) имеет соединение между витками, определяют дефектную фазу, катушечную группу или катушку рассмотренными выше способами. В сложных случаях (при замыкании большого числа катушек) или когда короткозамкнутую ветвь по каким–либо причинам не удается выявить, прибегают к методу деления обмотки на части. Для этого обмотку делят сначала пополам и проверяют мегомметром соединение между собой этих частей. Затем одну из этих частей делят снова на две части и каждую из них проверяют на соединение с первой половиной и так далее до тех пор, пока не будут найдены катушки, имеющие соединение. Для наглядности на рис. 7 схематически представлен этот способ нахождения дефекта в фазе, имеющей восемь катушечных групп, при наличии соединения между катушками 2 и 6 катушечных групп. Деление обмотки на части показано в последовательном порядке. Способ последовательного деления на равные части позволяет обойтись меньшим числом распаек, чем при делении всей обмотки на катушечные группы. 22
Деление обмотки на части показано в последовательном порядке. Способ последовательного деления на равные части позволяет обойтись меньшим числом распаек, чем при делении всей обмотки на катушечные группы. 22
Асинхронный электродвигатель: виды и принцип работы
В наши дни электрооборудование выглядит совсем иначе, чем изобретение российского электротехника, но по-прежнему используются для превращения электрической энергии в механическую. Надежность в работе, простая конструкция и невысокая себестоимость были по достоинству оценены покупателями. Сегодня асинхронные двигатели — наиболее распространенный во всем мире тип моторов. Их используют для комплектации промышленного оборудования, бытовой техники и электроинструментов в девяти случаев из десяти.
Какие бывают виды асинхронных механизмов
Асинхронный мотор имеет самую простую конструкцию. Классическое устройство электродвигателя состоит из статора, а также ротора.
Статор выполнен в форме классического цилиндра. Для изготовления статора производители используют тонкие стальные листы, обмотка в пазах сердечника сделана из специального провода. Оси обмоток расположены друг к другу под углом 120°. Их концы соединяются по-разному — все зависит от допустимой величины напряжения. В одних случаях соединение напоминаем звезду, в других — треугольник.
Для изготовления статора производители используют тонкие стальные листы, обмотка в пазах сердечника сделана из специального провода. Оси обмоток расположены друг к другу под углом 120°. Их концы соединяются по-разному — все зависит от допустимой величины напряжения. В одних случаях соединение напоминаем звезду, в других — треугольник.
В отличие от статора, роторы бывают нескольких типов. Производители классифицируют выпущенные моторы именно по типу ротора — виды асинхронных двигателей: с короткозамкнутым и фазным ротором. Давайте рассмотрим каждый их подробнее.
- Фазный — это ротор с трехфазной обмоткой, которая напоминает обмотку статора. Ее концы соединяются в форме звезды, края крепятся к контактным кольцам. К этим же кольцам присоединяются добавочные резисторы, которые меняют активное сопротивление в цепи и уменьшают большие пусковые токи.
- Короткозамкнутый ротор — сердечник, изготовленный из стальных листов. Для серийного производства, как правило, используется расплавленный алюминий, который заливается и образовывает стержни между торцевых колец.


Асинхронный электродвигатель: принцип работы
Напряжение подается на обмотку статора. В этот момент возникает магнитный поток, величина которого меняется с изменением частоты напряжения. Потоки сдвинуты во времени и пространстве по отношению друг к другу на 120°. Вращающим оказывается результирующий магнитный поток, который движется, тем самым создавая в проводниках ротора ЭДС. Обмотка ротора исполняет роль замкнутой электрической цепи, в ней появляется ток, который, взаимодействуя с потоками статора, создает пусковой момент. Мотор стремится повернуть ротор в направлении движения магнитного поля статора. В тот момент, когда он достигает значения тормозного момента ротора и превышает его, ротор начинает вращаться, вызывая скольжение.
Что такое скольжение? Это величина, которая показывает нам, насколько синхронная частота магнитного поля статора больше, чем частота вращения ротора.
S = ((n1 — n2)/n1) х 100 %, где:
S — скольжение;
n1 — синхронная частота магнитного поля статора, n2 — ротора.
Почему так важно скольжение? Его используют для характеристики асинхронных электродвигателей, ведь изначально скольжение равно единице, но по мере роста n1 относительная разность частот n1-n2 становится меньше. В результате этого, падает ЭДС и ток в проводниках ротора, что в свою очередь приводит к уменьшению вращающего момента. Если провести анализ, в состоянии холостого хода, в тот момент, когда мотор работает без нагрузки на валу, показатель скольжения минимален. Как только возрастает статический момент, скольжение растет до величины Skp — критического скольжения. Этот показатель очень важен, ведь как только будет превышена точка критического скольжения, асинхронные двигатели перестают стабильно работать. Значение скольжения колеблется в пределах от нуля до единицы, асинхронных моторов универсального назначения в номинальном режиме до 8 %.
Если говорить простыми словами, принцип работы мотора состоит во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Вращающий момент возникает только тогда, когда появляется разность частот вращения магнитных полей.
Синхронный двигатель с фазным ротором
Дмитрий Левкин
Синхронный двигатель с фазным ротором, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть. Ротор — это вращающаяся часть. Статор обычно имеет стандартную трехфазную обмотку, а ротор — с обмоткой возбуждения.Обмотка возбуждения соединена с контактными кольцами, на которые через щетки подается питание.
Синхронный двигатель с фазным ротором (щетки не показаны)
Постоянная скорость синхронного двигателя достигается за счет взаимодействия постоянного и вращающегося магнитного поля. Ротор синхронного двигателя создает постоянное магнитное поле, а статор — вращающееся магнитное поле.
Ротор синхронного двигателя создает постоянное магнитное поле, а статор — вращающееся магнитное поле.
Работа синхронного двигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора
Статор: вращающееся магнитное поле
На обмотки катушек статора подается трехфазный переменный ток.В результате получается вращающееся магнитное поле, которое вращается со скоростью, пропорциональной частоте напряжения питания. Подробнее о том, как вращающееся магнитное поле создается трехфазным питающим напряжением, читайте в статье «Трехфазный асинхронный двигатель».
Взаимодействие вращающегося (статор) и постоянного (ротор) магнитных полей
Ротор: постоянное магнитное поле
Обмотка ротора возбуждается источником постоянного тока через контактные кольца.Магнитное поле, создаваемое вокруг ротора, возбуждаемое постоянным током, показано ниже. Очевидно, что ротор ведет себя как постоянный магнит, поскольку он имеет такое же магнитное поле (в качестве альтернативы вы можете представить, что ротор сделан из постоянных магнитов).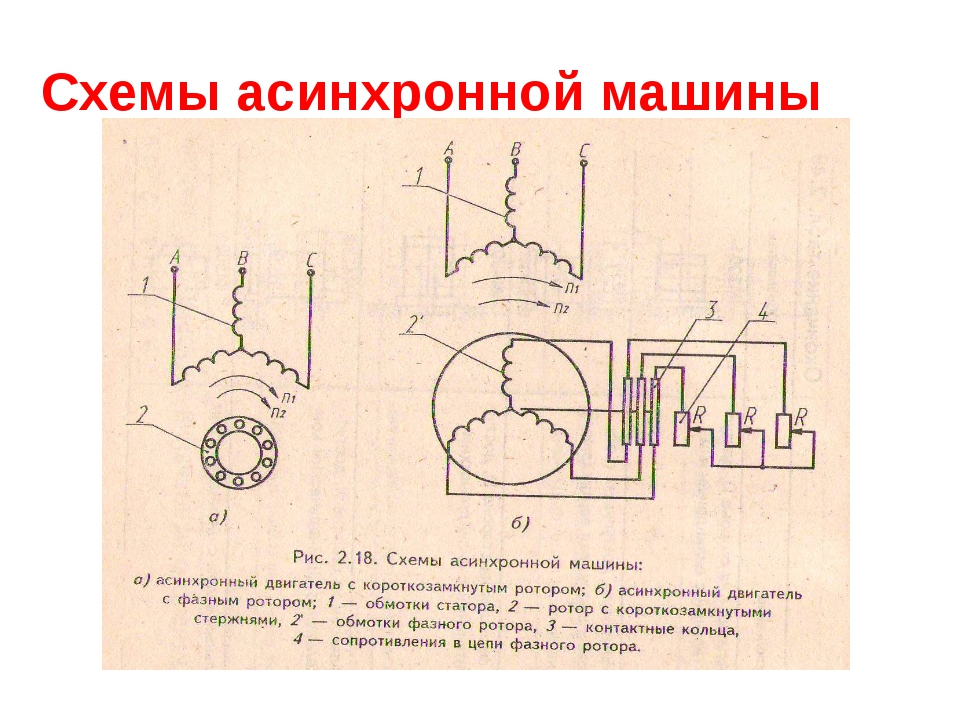 Рассмотрим взаимодействие ротора и вращающегося магнитного поля. Предположим, вы даете ротору начальное вращение в том же направлении, что и вращающееся магнитное поле. Противоположные полюса вращающегося магнитного поля и ротора будут притягиваться друг к другу, и они будут заблокированы с помощью магнитных сил.Это означает, что ротор будет вращаться с той же скоростью, что и вращающееся магнитное поле, то есть ротор будет вращаться с синхронной скоростью.
Рассмотрим взаимодействие ротора и вращающегося магнитного поля. Предположим, вы даете ротору начальное вращение в том же направлении, что и вращающееся магнитное поле. Противоположные полюса вращающегося магнитного поля и ротора будут притягиваться друг к другу, и они будут заблокированы с помощью магнитных сил.Это означает, что ротор будет вращаться с той же скоростью, что и вращающееся магнитное поле, то есть ротор будет вращаться с синхронной скоростью.
Магнитные поля ротора и статора заблокированы друг с другом
Скорость вращения магнитного поля можно рассчитать по следующему уравнению:
,
- где N с — частота вращения магнитного поля, об / мин,
- f — частота тока статора, Гц,
- p — количество пар полюсов.
Это означает, что скорость синхронного двигателя можно точно контролировать, изменяя частоту тока питания. Таким образом, эти электродвигатели подходят для высокоточных приложений.
Почему синхронные двигатели не запускаются автоматически от электросети?
Если у ротора нет начального вращения, ситуация отличается от описанной выше. Северный полюс магнитного поля ротора будет притягиваться к южному полюсу вращающегося магнитного поля и начнет двигаться в том же направлении.Но поскольку у ротора есть определенный момент инерции, его пусковая скорость будет очень низкой. За это время южный полюс вращающегося магнитного поля сменится северным полюсом. Так появятся силы отталкивания. В результате ротор начнет вращаться в обратном направлении и не запустится.
Демпферная обмотка — прямой пуск синхронного двигателя от электросети
Для реализации самозапуска синхронного двигателя без системы управления между концами ротора помещается «беличья клетка», которую также называют демпферной обмоткой.При запуске двигателя катушки ротора не возбуждаются. Под действием вращающегося магнитного поля в витках «беличьей клетки» индуцируется ток, и ротор начинает вращаться так же, как запускаются асинхронные двигатели.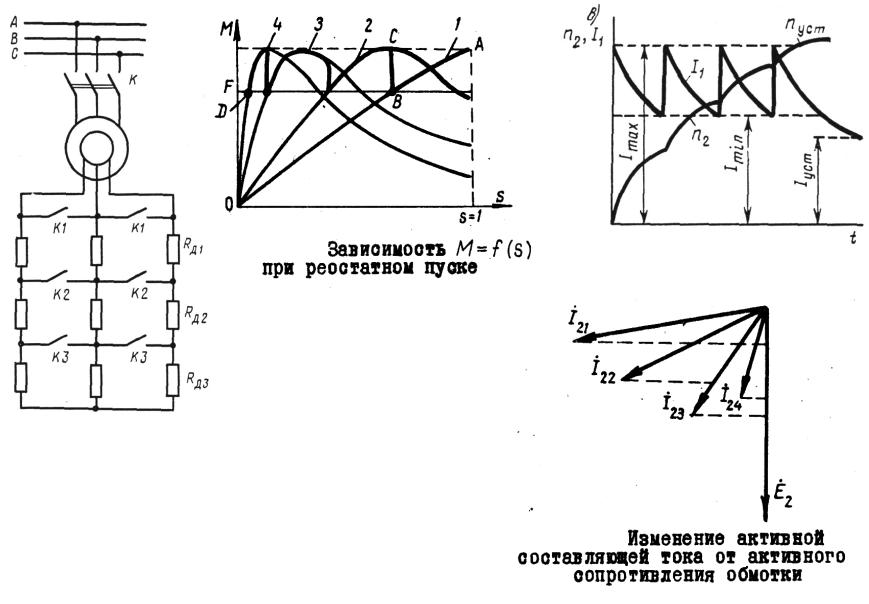
Когда ротор достигает максимальной скорости, питание подается на обмотку возбуждения ротора. В результате полюса ротора сцепляются с полюсами вращающегося магнитного поля, и ротор начинает вращаться с синхронной скоростью. Когда ротор вращается с синхронной скоростью, относительное движение между беличьей клеткой и вращающимся магнитным полем равно нулю.Это означает, что ток в короткозамкнутых витках отсутствует, и поэтому «беличья клетка» не влияет на синхронную работу электродвигателя.
Синхронные электродвигатели имеют постоянную скорость вращения независимо от нагрузки (при условии, что нагрузка не превышает максимально допустимую). Если крутящий момент нагрузки больше крутящего момента, создаваемого самим электродвигателем, он выйдет из синхронизма и остановится. Низкое напряжение питания и низкое напряжение возбуждения также могут быть причиной рассинхронизации.
Синхронные двигатели также могут использоваться для повышения коэффициента мощности системы. Когда единственной целью использования синхронных двигателей является повышение коэффициента мощности, их называют синхронными компенсаторами. В этом случае вал двигателя не связан с механической нагрузкой и свободно вращается.
Когда единственной целью использования синхронных двигателей является повышение коэффициента мощности, их называют синхронными компенсаторами. В этом случае вал двигателя не связан с механической нагрузкой и свободно вращается.
Также прочтите
Шаговый двигатель
Конструкция, принцип работы, преимущества и недостатки шагового двигателя, способы управления
Универсальный мотор
Универсальный двигатель — однофазный щеточный двигатель, работающий как от сети постоянного, так и переменного тока.
Гистерезис двигателя
Конструкция, принцип действия, преимущества и недостатки гистерезисного двигателя
Синхронный реактивный двигатель
Устройство, принцип работы и особенности синхронного реактивного электродвигателя
Основы короткозамкнутого ротора и фазного ротора.
Ротор — это вращающаяся часть любой электрической машины, например, генератор переменного тока, двигатель. В генераторе ротор служит источником вращающегося магнитного потока, а в двигателе — источником вращающей механической силы или крутящего момента.
Подключение электрического кабеля к ротору:
Поскольку он является частью электрической машины, необходимо учитывать его электрическое подключение. На самом деле не существует фиксированных правил электрического подключения к ротору. В случае генератора переменного тока ротор производит магнитный поток, поэтому он должен питаться постоянным током, этот ток подается на ротор либо через прямое соединение (щеточно-контактное кольцо), либо без щеточной индукции.
С другой стороны, в случае асинхронного двигателя переменный ток подается на ротор по принципу индуцированного тока.Но в синхронном двигателе подключение к ротору осуществляется щеткой и контактным кольцом.
Конструкция ротора:
Есть два типа конструкции ротора. 1. Ротор с короткозамкнутым ротором, 2. Ротор с фазовой обмоткой.
01. Конструкция ротора с короткозамкнутым ротором.
Конструкция роторас короткозамкнутым ротором может быть описана следующим образом: «Ламинирование или материал сердечника двигателя укладываются в цилиндрическую форму, металлические стержни помещаются в эти пазы ламинирования перпендикулярно.Обе стороны металлических стержней закорочены концевыми кольцами. Металлические стержни перекошены или расположены под некоторым углом к валу ротора ».
Роторс короткозамкнутым ротором популярен благодаря прочной и надежной конструкции, но поскольку его катушки (металлический стержень) закорочены вместе, нет никаких средств для добавления внешнего сопротивления. Добавление внешнего сопротивления улучшает запуск двигателя.
Этот тип ротора имеет более простую конструкцию, он представляет собой тип двигателя, очень простого, прочного и экономичного.
Изображение ниже описывает конструкцию ротора с короткозамкнутым ротором.
Базовый вид ротора с короткозамкнутым ротором.Здесь показаны только три пластинки или материал сердечника ротора.
В эту пластину вставлены металлические прутья.
02. Конструкция и функции ротора с фазовой обмоткой
Трехфазная, двухслойная, распределенная обмотка — характеристика ротора с фазной обмоткой. Число полюсов ротора должно быть равно полюсу статора. И всегда ротор будет трехфазным, даже если статор намотан на две фазы.
Конструкция:
В роторе с фазной обмоткой, три фазы внутри соединены звездой. Другая сторона фазовой катушки выведена наружу, и к ней подается трехфазный ток с помощью контактного кольца и щетки.
Ротор с фазовой обмоткой состоит из настоящих обмоток, таких как обмотки статора, он имеет более сложную и хрупкую конструкцию (щетки скользят по ротору с возможным расположением сопротивлений для контроля фазы запуска), он требует периодического обслуживания и имеет большие габаритные размеры.
Как улучшить запуск фазного ротора путем добавления внешнего сопротивления.
Очевидно, что сложность запуска двигателей может быть решена, если перед запуском можно добавить внешнее сопротивление (таким образом, улучшив низкий крутящий момент при запуске) и удалить его, пока двигатель работает на полной скорости. Особенность ротора с фазовой обмоткой заключается в том, что внешнее сопротивление можно добавлять и снимать во время работы двигателя.
В схеме добавлено внешнее сопротивление последовательно с цепью ротора с фазной обмоткой.Удаление осуществляется с помощью контактного кольца и щеточки. Ниже два рисунка прояснят факты.
внутренняя цепь ротора с фазной обмоткой.Внешнее сопротивление может быть добавлено при запуске и отключено, когда двигатель наберет достаточную скорость. Конструкция контактного кольца в роторе с фазовой обмоткой — добавление внешнего сопротивления в цепь ротора для создания пускового момента, а затем отключение, когда двигатель набирает скорость. Дополнительная литература
Асинхронный двигатель с обмоткой ротора
Опубликовать ваши комментарии?
Асинхронные двигатели с фазным роторомАсинхронные двигатели Электроника
9 часов назад Асинхронный двигатель с фазным ротором имеет статор, подобный короткозамкнутому асинхронному двигателю , но ротор с изолированными обмотками, выведенными через контактные кольца и щетки.. Однако на контактные кольца не подается питание. Их единственная цель — обеспечить последовательное включение сопротивления с обмотками ротора при запуске (рисунок ниже).
Расчетное время чтения: 5 минут
Веб-сайт: Allaboutcircuits.com
Категория : Используйте слова в предложении
Wound, With, Windings, While
Что такое двигатель с фазным ротором и как он работает?
9 часов назад Двигатели с фазным ротором представляют собой специализированный тип двигателя переменного тока и работают во многом так же, как и другие асинхронные двигатели .Они состоят из двух основных компонентов, внешнего статора и внутреннего ротора , которые разделены небольшим воздушным зазором. Статор, как правило, один и тот же для всех асинхронных двигателей и состоит из металлических пластин, которые удерживают
Расчетное время чтения: 9 минут
Веб-сайт: Thomasnet.com
Категория : Используйте в предложении
Wound, Work, Way, which
TECOWestinghouse Wound Rotor Motors
6 часов назад Wound Rotor . Двигатели с фазным ротором представляют собой чрезвычайно универсальную разновидность асинхронных двигателей . Обладая прочной конструкцией, эти машины обладают уникальной способностью плавно и легко постепенно доводить до нужной скорости оборудование с высокой инерцией и большие грузы. Двигатели с фазным ротором также могут развивать высокий пусковой крутящий момент в состоянии покоя, сохраняя при этом низкий бросок тока.
Расчетное время чтения: 2 минуты
Веб-сайт: Tecowestinghouse.com
Категория : Используйте слова в предложении
Раны, в то время как
9002 Роторы 4 Индукционные двигатели и пускатели часов назад Асинхронный двигатель с фазным ротором имеет обмотку ротора , которая не замкнута накоротко на роторе , как двигатель с короткозамкнутым ротором, но соединена с контактными кольцами, так что цепь ротора может быть изменен путем добавления внешнего сопротивления.Это дополнительное сопротивление может выполнять две задачи:Размер файла: 79 КБ
Количество страниц: 2
Веб-сайт: Powellind.com
Категория : Использование и в предложении
039010 Обмотка, обмотка
Асинхронные двигатели с фазным ротором: AC MOTORS
5 часов назад Асинхронные двигатели с фазным ротором . Асинхронный двигатель с фазным ротором имеет статор, подобный асинхронному двигателю с короткозамкнутым ротором , но ротор с изолированными обмотками, выведенными через контактные кольца и щетки.Однако на контактные кольца не подается питание. Их единственная цель — обеспечить включение сопротивления последовательно с обмотками ротора при запуске.
Веб-сайт: Learningelectronics.net
Категория : Используйте слова в предложении
Рана, с, обмотки, в то время как
Ротор с обмоткой TECOWestinghouse Motor Company, мир
1 час назад Асинхронный двигатель с ротором Применение Как это работает Двигатели с фазным ротором — чрезвычайно универсальная разновидность асинхронных двигателей .Обладая прочной конструкцией, эти машины обладают уникальной способностью плавно и легко постепенно доводить до нужной скорости оборудование с высокой инерцией и большие грузы. Двигатели с фазным ротором также могут развиваться с высоким пуском
Размер файла: 725 КБ
Количество страниц: 4
Веб-сайт: Tecowestinghouse.com
Категория 9000: Использование
Wound, Works
Двигатель с фазным ротором Wikipedia
7 часов назад Двигатель с фазным ротором , также известный как электродвигатель с фазным кольцом , ротор , представляет собой тип асинхронного двигателя , в котором обмотки ротора подключен через контактные кольца к внешнему сопротивлению.Регулировка сопротивления позволяет управлять характеристикой скорость / крутящий момент двигателя . Двигатели с ротором – с обмоткой можно запустить с низким пусковым током, вставив высокое сопротивление в ротор …
Расчетное время чтения: 2 минуты
Веб-сайт: En.wikipedia.org
Категория : Используйте слова в предложении
Wound, Where, Windings, With
Использование частотно-регулируемых приводов с двигателями с фазным ротором
2 часа назад Джим Макки (скончался) Alabama Electric Motor Service Sheffield, Alabama Technical Education Committee Член Контактного кольца или асинхронного двигателя с фазным ротором (WRIM) в множество приложений.Многие из этих приложений используют высокий пусковой момент WRIM при ограничении тока для запуска и работы с очень высокими инерционными нагрузками, такими как молотковые дробилки, прокатные станы,…
Расчетное время чтения: 1 мин.
Веб-сайт: Easa.com
Категория : Использование в предложении
Wound, Wrim, While
Ротор асинхронного двигателя Электрический4U
1 час назад Ротор , как следует из названия, это вращающаяся часть электрической машины, в котором ток индуцируется действием трансформатора от вращающегося магнитного поля. Ротор асинхронного двигателя бывает двух типов: Беличья клетка Обмотка ротора Тип Ротор или…
Расчетное время чтения: 3 минуты
Веб-сайт: Electrical4u.com
Категория: Используйте слова в предложении
Что, Обмотка
Типы двигателей переменного тока: Обмотка, Беличья клетка, Сопротивление
9 часов назад Типы двигателей переменного тока : Обмотка , Беличья клетка, Сопротивление, Гистерезис и многое другое.Двигатель переменного тока требует входа переменного тока для создания вращающегося магнитного поля. Это поле взаимодействует с проводниками ротора и заставляет его вращаться вместе с полем статора. Два основных типа двигателей переменного тока — это асинхронные двигатели и синхронные двигатели .
Веб-сайт: Etechnophiles.com
Категория : Использование в предложении
Рота, с
Моторы с ротором— высокий крутящий момент и регулируемая скорость EC&M
8 часов назад Ротация Двигатели с ротором обеспечивают регулирование скорости при тяжелых нагрузках и нагрузках с высоким крутящим моментом.Что особенного в роторном двигателе с обмоткой — ? Этот тип 3-фазного асинхронного двигателя имеет высокий пусковой момент, что делает его идеальным для приложений, где стандартные двигатели конструкции NEMA не работают. Роторный двигатель – с обмоткой особенно эффективен в приложениях, где использование двигателя с короткозамкнутым ротором может привести к…
Расчетное время чтения: 5 минут
Веб-сайт: Ecmweb.com
Категория : Использование и в предложении
Рана, что, что, где
Разница между беличьей клеткой и индукционным ротором
1 час назад Беличья клетка двигатель и контактное кольцо ( Ротор с обмоткой ) двигатель — это два типа асинхронного двигателя ↗. Индукционный двигатель с контактным кольцом также известен как асинхронный двигатель с фазным ротором . Оба этих типа асинхронного двигателя работают на…
Веб-сайт: Come4concepts.com
Категория : Использование между в предложении
Обмотка
Теория асинхронного двигателя с короткозамкнутым ротором
6 часов назад Асинхронный двигатель с обмоткой ротора (WRIM): Тип асинхронного двигателя для переменного тока, в котором ротор имеет проволочную обмотку. Доступ к обмоткам осуществляется через контактные кольца. Другой тип — двигатель с короткозамкнутым ротором, без проволочной обмотки и контактных колец.…
Расчетное время чтения: 9 минут
Веб-сайт: Electricalacademia.com
Категория : Используйте слова в предложении
Wound, Wrim, Which, Wire, Winding
, Обмотки
Высоковольтные асинхронные двигатели с фазным ротором Преобразование мощностиТолько сейчас Асинхронный двигатель с фазным ротором имеет несколько явных преимуществ при применении. Исторически он использовался для трудно запускаемых, высокоинерционных вентиляторов или там, где требования к энергосистеме требуют плавного пуска.С жидкостным реостатом или статическим вторичным регулятором скорости, ведомый ротор является важным альтернативным приводом, где требуется ограниченный диапазон регулируемой скорости.
Веб-сайт: Gepowerconversion.com
Категория : Используйте слова в предложении
Wound, Where, With
22 Разница между беличьей клеткой и контактным кольцом (обмотка
2 часа назад В зависимости от типа ротора , который используется в трехфазном асинхронном двигателе , трехфазный асинхронный двигатель подразделяется на два типа .Беличья клетка Асинхронный двигатель ; Контактное кольцо (обмотка) Асинхронный двигатель ; Эти два асинхронных двигателя используются с разными функциями в зависимости от их основных характеристик.
Веб-сайт: Dipslab.com
Категория : Использование между в предложении
Который, с обмоткой
Асинхронный двигатель с обмоткой ротора Электродвигатели и генераторы
9 часов назад Асинхронный двигатель с обмоткой ротора Роторный асинхронный двигатель tmcgett (электрический) (OP) 12 января 04 22:54.Глядя на клеммную коробку двигателя (WRIM), правильно ли предположить, что группа проводов с заземлением является статором. И может ли ротор быть соединенным звездой или треугольником. БЛАГОДАРЮ .
Веб-сайт: Eng-tips.com
Категория : Используйте слова в предложении
Wound, When, Wrim, Wires, With, Wired, Wye
Асинхронный двигатель с короткозамкнутым ротором против ротора с обмоткой индукционный
5 часов назад Если мы классифицируем асинхронный двигатель на основе типа используемого ротора , то есть два типа асинхронного двигателя .Первый представляет собой асинхронный двигатель с короткозамкнутым ротором , а другой — асинхронный двигатель с обмоткой , также известный как контактное кольцо . Оба этих асинхронных двигателя имеют различную конструкцию, пуск, стоимость и применение.
Веб-сайт: Etechnophiles.com
Категория : Используйте слова в предложении
We, Wound
Полифазный асинхронный двигатель
2 часа назад Модель имеет асинхронный двигатель с фазным ротором Ротор аналогичен ротору с короткозамкнутым ротором, за исключением того, что короткозамкнутая короткозамкнутая обмотка заменена трехфазной изолированной обмоткой, аналогичной обмотке статора.Эта обмотка обычно соединена звездой
Размер файла: 68 КБ
Количество страниц: 10
Веб-сайт: Ecee.colorado.edu
Категория : Используйте слова 9 в предложении Обмотка, звезда, звезда
Индукционная машина с обмоткой ротора обзор
8 часов назад III.C.2 Асинхронный двигатель с обмоткой ротора . Рассмотренные выше три режима управления — изменение количества пар полюсов.изменение напряжения питания и изменение частоты питания — также может использоваться с роторными индукционными машинами с обмоткой и . Кроме того, к этой машине может применяться четвертый режим управления, увеличение сопротивления ротора .
Веб-сайт: Sciencedirect.com
Категория : Используйте слова в предложении
Обмотка, с роторным асинхронным двигателем
Обзор Темы ScienceDirect
Just Now A индукционный двигатель с ротором представляет собой асинхронный двигатель , в котором вторичная цепь состоит из многофазной обмотки или катушек, выводы которых либо замкнуты накоротко, либо замкнуты посредством соответствующих цепей.Синхронный двигатель . Синхронный двигатель — это синхронная машина, которая преобразует электрическую энергию в механическую.
Веб-сайт: Sciencedirect.com
Категория : Используйте слова в предложении
Обмотка, которая, обмотка, чья
Обмотка ротора Индукционные двигатели Thomasnet
9 часов назад Дистрибьютор подъемника и асинхронные двигатели с фазным ротором . Типы включают дробные, интегральные двигатели и двигатели переменного тока с рейтингом выше NEMA.Доступны однофазные или трехфазные мощности от 1/4 до 5000 л.с. и номинальное напряжение от 115 до 4160 В. Обслуживаемые рынки включают OEM-производителей, пищевую промышленность, литейные заводы, бумагу, упаковку, энергию, энергию ветра, преобразование, пластмассы…
Веб-сайт: Thomasnet.com
Категория : Используйте слова в предложении
Обмотка, ветер
Способы запуска асинхронного двигателя Bright Hub Engineering
6 часов назад Этот стартер используется с Асинхронный двигатель с фазным ротором .Он использует внешнее сопротивление / фазу в цепи ротора , так что ротор будет развивать высокое значение крутящего момента. Высокий крутящий момент создается на низких скоростях, когда внешнее сопротивление имеет более высокое значение.
Расчетное время чтения: 6 минут
Веб-сайт: Brighthubengineering.com
Категория : Используйте слова в предложении
С, Ранение, Воля, Когда
Индукционное кольцо Как это работает ? YouTube
3 часа назад Асинхронные двигатели уже много десятилетий правят промышленным миром.В асинхронных двигателях , используемых в лифтах и подъемниках, вы увидите ротор типа под названием
Веб-сайт: Youtube.com
Категория : Используйте его в предложении
World, Will
Двигатель с фазным ротором Все промышленные производители Видео
4 часа назад Двигатель с фазным ротором Беличья клетка малая. асинхронный двигатель . Серия YR. Мощность: 2000 кВт. YR, YRKS, YRKK Series Высоковольтный двигатель Двигатель Номинальная мощность: 400 ~ 5600 кВт Номинальное напряжение: 3 кВ, 6 кВ, 10 кВ Размер корпуса: 710 ~ 800 Полюс: 4 ~ 12 полюсов Введение Эта серия двигателей со стальной конструкцией коробчатого типа, сравните это продукт Удалить из инструмента сравнения.
Веб-сайт: Directindustry.com
Категория : Используйте слова в предложении
Рана, с
Советы по ремонту ротора: тестирование, применение и отказ
Только сейчас, когда ротор с раной Двигатель выходит из строя, необходимо проверить несколько вещей, чтобы определить основную причину отказа. Во-первых, необходимо рассмотреть всю цепь ротора . Обрыв цепи ротора может привести к переходному процессу напряжения (например.g., «быстрый повторный пуск» или «АПВ») режим отказа. В большинстве цепей двигателя с обмоткой ротора используется ротор
Веб-сайт: Applied-dynamics.com
Категория : Использование и в предложении
Когда, Обмотка
назад Электродвигатель Википедия
4 часа назад Асинхронный двигатель с клеткой и ротором Асинхронный двигатель представляет собой асинхронный двигатель переменного тока , в котором мощность передается на ротор посредством электромагнитной индукции , во многом аналогично действию трансформатора.Асинхронный двигатель напоминает вращающийся трансформатор, поскольку статор (неподвижная часть) по существу является первичной стороной трансформатора, а ротор
Расчетное время чтения: 10 минут
Веб-сайт: En.wikipedia. org
Категория : Используйте слова в предложении
Рана, где
Метод пуска асинхронных двигателей The Engineering
6 часов назад В случае асинхронного двигателя с ротором можно получить условия пуска при меньшем токе за счет добавления дополнительного резистора в схему ротора .Этот дополнительный резистор не только увеличивает пусковой момент, но и снижает пусковой (начальный) ток.
Расчетное время чтения: 9 минут
Веб-сайт: Theengineeringknowledge.com
Категория : Использование в предложении
Wound
INDUCTION MOTOR 9000 часов назад 1246 Электрические технологии (b)
Ротор (i) Ротор с короткозамкнутым ротором : Двигатели , в которых используется этот тип ротора , известны как асинхронные двигатели с короткозамкнутым ротором.(ii) Фазовый ротор с обмоткой или : Двигатели , использующие этот тип ротора , по-разному известны как «фазные с обмоткой » двигатели или « с обмоткой » двигатели или как » токосъемники ‘ моторы . 34,4. Беличья клетка Ротор Почти 90 процентов асинхронных двигателей …Веб-сайт: Nit-edu.org
Категория : Использование в предложении
Обмотка
ЕДИНИЦА .ИНДУКЦИОННЫЕ ДВИГАТЕЛИ
3 часа назад 2. Ротор с обмоткой Беличья клетка Ротор В роторе с короткозамкнутым ротором обмотка ротора состоит из одиночных медных или алюминиевых стержней, помещенных в пазы и замкнутых накоротко. -кольца с двух сторон ротора . Большинство однофазных асинхронных двигателей имеют ротор с короткозамкнутым ротором. Один или 2 вентилятора — это
Веб-сайт: Erode-sengunthar.ac.in
Категория : Используйте слова в предложении
Wound, Winding
13.Асинхронные двигатели с 8-фазным ротором TechnoCrazed
2 часа назад Асинхронный электродвигатель с фазным ротором имеет статор, подобный асинхронному двигателю с короткозамкнутым ротором , но ротор с изолированными обмотками, выведенными через контактные кольца и щетки. Однако на контактные кольца не подается питание. Их единственная цель — обеспечить последовательное включение сопротивления с обмотками ротора при запуске (рисунок ниже).
Веб-сайт: Technocrazed.com
Категория : Используйте слова в предложении
Обмотка, с обмотками, в то время как
Вопрос: В чем разница между белковой клеткой
2 часа назад Асинхронный двигатель с контактным кольцом является одним из типов трехфазного асинхронного двигателя и представляет собой двигатель с фазным ротором типа .Благодаря различным преимуществам, таким как низкий начальный ток, высокий пусковой крутящий момент и улучшенный коэффициент мощности, он используется в приложениях, требующих высокого крутящего момента, в кранах и лифтах.
Веб-сайт: Seniorcare2share.com
Категория : Используйте слова в предложении
Wound
Индукционный двигатель с обмоткой ротора по лучшей цене в Индии
5 часов назад Просмотреть номер мобильного телефона. Звоните + 91-8048875691. Связаться с поставщиком Запрос цитаты. Асинхронный двигатель с фазным ротором , 220-240. ₹ 20,000 / шт. Получить последнюю цену. Количество полюсов: 2.0. Напряжение: 220-240. Монтаж: лапка. Соответствуя требованиям наших клиентов, мы участвуем в предложении Rotor Induction .
Веб-сайт: Dir.indiamart.com
Категория : Использование в предложении
Рана, с, мы
8-полюсный индукционный двигатель с ротором, работающий при 60 Гц
1 час назад Ротор индукционной машины подключен к системе 50 Гц.Если механическое вращение ротора происходит в том же направлении, что и вращение потока обмотки ротора , то частота напряжения статора будет. Последний ответ: 6-полюсная 3-фазная машина с ротором с обмоткой — с индукционным ротором приводится в движение другой машиной со скоростью 1800 об / мин. Ротор индукции
Веб-сайт: Askoranswerme.com
Категория : используйте слова в предложении
Обмотка, воля, намотка
ISM для электрических систем
7 часов назад Четырехполюсный асинхронный двигатель с ротором и фазным ротором, 208 В, 60 Гц, асинхронный двигатель с фазным ротором мощностью 15 л.с.Компоненты эквивалентной схемы: R 1 = 0,220 Ом R 2 = 0,127 Ом XM = 15,0 Ом X 1 = 0,430 Ом X 2 = 0,430 Ом P mech = 300 WP misc ≈ 0 сердечник = 200 Вт Для скольжения 0,05 найдите (a ) Линейный ток IL (b) Потери в меди статора P SCL (c) Мощность воздушного зазора P AG
Веб-сайт: Egr.unlv.edu
Категория : Используйте в предложении
Обмотка
3-фазный асинхронный двигатель Инженерные проекты
3 часа назад Асинхронный двигатель с обмоткой ротора .В асинхронном двигателе с фазным ротором имеется трехфазная обмотка, аналогичная обмотке статора. Эта обмотка равномерно размещена в пазах ротора . Концы этих обмоток соединены с 3 контактными кольцами на валу. Каждая фаза из трех фаз подключена к одному контактному кольцу.
Расчетное время чтения: 8 минут
Веб-сайт: Theengineeringprojects.com
Категория : Используйте слова в предложении
Wound, Winding, which, windings
Wound with peruntoring machine или SI
8 часов назад Индукционная машина Блок Ротор с обмоткой моделирует асинхронную машину с обмоткой — с ротором с основными параметрами, выраженными в единицах измерения или в Международной системе единиц (СИ).Асинхронная машина с обмоткой — ротора является типом индукционной машины . Все соединения статора и ротора доступны на блоке. Таким образом, вы можете смоделировать плавный пуск
Веб-сайт: Mathworks.com
Категория : Использовать с помощью в предложении
Ранение, с
МЕТОДЫ УПРАВЛЕНИЯ СКОРОСТЬЮ ДЛЯ РАБОТЫ РОТОРА IMs электрические…
7 часов назад Это верно для контроля напряжения.Иное поведение достигается при постоянном регулировании тока ротора . [7] Тем не менее, в режимах подсинхронного двигателя , двигателя и генератора все это возможно при адекватном управлении. Пример 8.4 Двунаправленный IM. IM с намотанным ротором имеет данные: V sn = 220 В / фаза, f 1 = 50 Гц, R s =
Расчетное время чтения: 5 минут
Веб-сайт: Machineryequipmentonline.com
Категория : Используйте слова в предложении
With, Wound
WoundRotor Induction Generator with External Resistance
4 часа назад Wound — Rotor Induction Generator with External Resistance Control.В индукционном генераторе с короткозамкнутым ротором «цепи» ротора являются фиктивными и недоступны за пределами машины, а индуцированные токи, ответственные за создание крутящего момента, строго зависят от скорости скольжения. В турбине, показанной на рисунке справа, используется
Веб-сайт: Esig.energy
Категория : Использование в предложении
Обмотка, с
Асинхронный двигатель со скользящим кольцом подробно Come4Concepts
2 часа назад Ротор с обмоткой : Асинхронные двигатели с контактным кольцом обычно имеют ротор с обмоткой .Он состоит из многослойного цилиндрического сердечника и имеет 3 фазные обмотки, которые обычно соединены звездой, как и на статоре. На приведенной ниже диаграмме показаны…
Веб-сайт: Come4concepts.com
Категория : Использование в предложении
Обмотки, которые
Индукционные двигатели с обмоткой ротора: Ручное управление обмоткой
1 час назад Асинхронный двигатель с фазным ротором является одним из трех основных типов трехфазных двигателей .Его часто называют контактным кольцом двигателя из-за трех контактных колец на валу ротора . Обмотка статора двигателя с фазным ротором идентична двигателю с короткозамкнутым ротором. Разница между двумя двигателями заключается в конструкции ротора .
Расчетное время чтения: 5 минут
Веб-сайт: Machineryequipmentonline.com
Категория : Использование в предложении
Wound, Winding
MCQ Exam Board Motors Part 3 • Pinoybix
2 часа назад Обмотка ротора трехфазного асинхронного двигателя с ротором обычно ____ подключена.Звезда. Б. дельта. C. частично звезда частично дельта. D. ничего из этого. Просмотр ответа: Ответ: Вариант A. В двигателе с фазным ротором обмотка ротора имеет намотку для полюсов ____ обмотки статора. А. равно. Б. больше, чем. C. меньше, чем. D. Ни один из этих
Веб-сайт: Pinoybix.org
Категория : Использование в предложении
Обмотка, намотка
Обмотка двигателя с обмоткой ротора HandsOn Industrial Motor
2 часа назад Amatrol’s Система обучения двигателя с фазным ротором (85-MT2D) охватывает функции, работу и рабочие характеристики двигателей с фазным ротором .В то время как частотно-регулируемые приводы и стандартные асинхронные двигатели заменили двигатели с фазным ротором во многих приложениях, эти двигатели по-прежнему используются для тяжелых условий эксплуатации с высоким крутящим моментом, таких как промышленные краны и подъемники.
Веб-сайт: Amatrol.com
Категория : Используйте слова в предложении
Рана, в то время как
Что такое контактные кольца и почему они используются в некоторых двигателях?
6 часов назад В версии асинхронного двигателя AC , называемой двигателем с фазным ротором , контактные кольца используются не для передачи мощности, а для создания сопротивления в обмотках ротора .В двигателе с фазным ротором используются три контактных кольца, обычно изготовленных из меди или медного сплава, установленных на валу двигателя (но изолированного от него).
Веб-сайт: Motioncontroltips.com
Категория : Использование и в предложении
Обмотка, обмотка
Типы ротора трехфазного асинхронного двигателя
Есть два типа роторов асинхронных двигателей:
- Ротор с короткозамкнутым ротором или просто ротор с короткозамкнутым ротором.
- Роторы с фазовой или фазовой обмоткой. Двигатели, в которых используется этот тип ротора, известны как роторы с контактным кольцом.
Ротор с короткозамкнутым ротором:
Двигатель с короткозамкнутым ротором работает по принципу Электромагнетизм . Он состоит из ротора, статора и других частей, таких как подшипники, многослойный цилиндрический сердечник, вал и т. Д.
Подшипники в двигателе с сепаратором ротора предназначены для уменьшения трения между вращающейся и неподвижной частями машины. Ротор двигателя состоит из многослойного цилиндрического сердечника с параллельными пазами для несения проводников ротора.Проводники ротора не являются проводами, а состоят из тяжелых стержней из меди, алюминия или сплава. Вал используется в двигателе для передачи механической энергии от или к машине. Статор — это внешняя неподвижная часть двигателя.
Рисунок: Ротор клетки
Преимущества перекоса проводников обоймы ротора:
- Помогает снизить шум во время работы и обеспечить равномерный крутящий момент.
- Во время блокировки зубья ротора и статора притягиваются друг к другу из-за магнитного поля, и эта тенденция к блокировке уменьшается в двигателе с кожухом.
Ротор с обмоткой или ротор с контактным кольцом:
Ротор с обмоткой состоит из якоря с прорезями. Изолированные проводники вставляются в пазы и соединяются, образуя трехфазную двухслойную распределенную обмотку, аналогичную обмотке статора. Обмотки ротора соединены звездой.
Обмотки ротора распределены равномерно и обычно соединяются звездой, причем выводы выводятся из машины через контактные кольца, размещенные на валу. Нарезание токосъемных колец выполняется с помощью угольных медных щеток.Конструкция с фазным ротором обычно используется для крупногабаритных машин, где требования к пусковому крутящему моменту являются жесткими. Внешнее сопротивление может быть добавлено в цепь ротора через контактное кольцо для уменьшения пускового тока и одновременно пускового момента.
Рисунок: Асинхронный двигатель с контактным кольцом
Разница между обоймой и обмоткой роторов:
Преимущества сепаратора ротора:
- Роторы с сепаратором имеют прочную конструкцию и дешевле, чем роторы с обмоткой.
- Эти роторы не имеют щеток, что снижает риск искрообразования.
- Требуется гораздо меньше обслуживания.
- Они обладают высоким КПД и повышенным коэффициентом мощности.
Роторные роторы имеют следующие преимущества:
- Роторы с обмоткой имеют высокий пусковой момент и низкий пусковой ток по сравнению с роторами с сепаратором.
- В случае роторов с обмоткой, мы можем подключить дополнительные роторы в цепь ротора для управления скоростью.
(PDF) Разработка и анализ новой синхронной машины с бесщеточным ротором
ТРАНЗАКЦИИ IEEE ПО МАГНИТНОМУ.
Проектирование и анализ нового бесщеточного ротора
Синхронная машина
Касим Али1, Томас А. Липо2, научный сотрудник, IEEE, и Бюнг-ил Квон1, старший член, IEEE
1 Департамент инженерии электронных систем, Университет Ханьян , Ansan 426-791, Korea
2 Департамент электротехники и вычислительной техники, Университет штата Флорида, Таллахасси, Флорида 32306, США
В этой статье представлена новая концепция бесщеточного возбуждения синхронной машины с фазным ротором (WRSM), основанная на поколении
и использование субгармонической составляющей магнитодвижущей силы статора (МДС).В этом методе предлагается топология двойного инвертора для обмотки статора
. Идея состоит в том, чтобы сгенерировать и использовать дополнительную субгармоническую составляющую MMF статора вместе с основной составляющей
. Ротор имеет две разные обмотки; возбуждение и обмотка возбуждения. Субгармоническая составляющая индуцирует напряжение
в обмотке возбуждения и питает обмотку возбуждения через вращающийся выпрямитель на роторе. Двумерный (2-D) анализ методом конечных элементов
(FEA) был проведен для анализа и проверки предложенного бесщеточного WRSM.
Ключевые слова: бесщеточное возбуждение, синхронная машина, анализ методом конечных элементов (FEA).
I. ВВЕДЕНИЕ
лектрические машины играют важную роль в современном мире
технологий. Научные исследования в этой области
ведутся уже более века. В последнее время машины с постоянным магнитом
находятся в центре внимания из-за их высокоточных приводов с фиксированной скоростью
. Но высокая цена из-за материала постоянного магнита
является ключевым фактором при производстве
таких машин.В отличие от синхронных машин с фазным ротором
, машиныимеют низкую цену, машины без постоянных магнитов
имогут использоваться в широком диапазоне скоростей [1].
В WRSMs используется обмотка возбуждения, на которую подается постоянный ток
(DC), который генерирует поток ротора. Постоянный ток
может подаваться на обмотку ротора либо с помощью щетки и структуры контактных колец
, либо методом бесщеточного возбуждения. Щетки
и контактные кольца имеют потери и проблемы с обслуживанием, поэтому они
используются для малых синхронных машин.
Для решения этой проблемы использовались разные методы.
Синхронные машины с гибридным возбуждением были предложены
, чтобы объединить преимущества синхронной машины с постоянным магнитом
(PMSM) и WRSM [2], [3]. Сравнительное исследование
между гибридными топологиями возбуждения
обсуждается в [4]. Однако рост цен на магниты из редкоземельных металлов
, вызванный его дефицитом, является ключевым фактором при разработке такого рода машин
.
Бесщеточная машина переключения потока с возбуждением постоянным током (DCEFSM)
изучается в [5] с двумя наборами обмоток в статоре. Производящие факторы крутящего момента
проанализированы для исследования истинной природы машины
по сравнению с машинами постоянного тока (DCM),
синхронными машинами (SM) и машинами
с переключаемым сопротивлением (SRM).
Для бесщеточного возбуждения обычно использовались дополнительные
(вспомогательные) обмотки статора для возбуждения поля ротора
обмотка.Дополнительная обмотка возбуждения на статоре и гибридный ротор
для разработки бесщеточной машины исследована в [6]. Этот метод
сталкивается с проблемами, поскольку обе обмотки статора
расположены в одном сердечнике статора и требует большого объема статора для
, оставляя место для обеих обмоток. На основе использования
высших гармоник МДС статора некоторая работа составила
, исследованную в [7], [8]. В [7] обмотка
с дробной концентрацией пазов (FSCW) используется для выработки 5-й и 13-й гармоник для
машины с 18 зубцами / 10 полюсами.5-я гармоника используется в качестве основной рабочей гармоники
, в то время как 13-я гармоника используется для возбуждения обмотки возбуждения ротора
, что обеспечивает бесщеточный режим работы.
В [8] принцип бесщеточного возбуждения гармоник
реализован путем введения составляющей тока третьей гармоники или высокочастотной составляющей однофазного тока
или составляющей постоянного тока
в трехфазные открытые обмотки статора, чтобы генерировать время
пульсирующее магнитное поле, которое может индуцировать обратный электродвигатель
силы (ЭДС) в специально разработанных гармонических катушках ротора.Индуцированная обратная ЭДС
выпрямляется и подает постоянный ток на обмотку возбуждения ротора
.
В этой статье представлен новый метод бесщеточной работы
WRSM, основанный на генерации дополнительной гармонической составляющей MMF статора ниже
, а не более высокой гармонической составляющей
. Эта субгармоническая составляющая
используется для возбуждения обмоток ротора без использования щеток
и контактных колец.2D FEA выполняется для анализа и проверки
предложенного бесщеточного WRSM.
II. ПРЕДЛАГАЕМАЯ ТОПОЛОГИЯ МАШИНЫ
A. Топология
Топология предлагаемого бесщеточного WRSM, исследованного в данной статье
, показана на рисунке 1. Обмотка статора разделена на две части
внутри периферии статора. Инвертор 1 подает фазный ток 3-
на обмотку в одной части машины
, в то время как инвертор 2 подает трехфазный ток на обмотку
в другой части машины.Эта топология с двумя инверторами
предназначена для управления токами в двух отдельных частях обмотки статора
. Разница в величине токов в двух
частях обмотки статора является причиной генерации
дополнительной субгармонической составляющей MMF статора.
В роторе размещены две отдельные обмотки; возбуждения и
обмотки возбуждения. Обмотка возбуждения отвечает за индукцию
напряжения, необходимого для возбуждения ротора.Другая обмотка
является обмоткой возбуждения. Индуцированное напряжение в обмотке возбуждения
выпрямляется и подается на обмотку возбуждения
. Схема выпрямительного диодного моста размещена на роторе
между двумя обмотками ротора.
Рукопись получена в марте 2015 г. Автор для переписки:
Автор для переписки: Б.И. Квон (электронная почта: [email protected])
Идентификатор цифрового объекта, вставленный IEEE
Каков принцип работы трехфазной Индукционный двигатель?
Электродвигатель преобразует электрическую энергию в механическую, которая затем подается на различные типы нагрузок.Двигатели переменного тока работают от источника переменного тока и делятся на синхронные, однофазные, трехфазные асинхронные двигатели и двигатели специального назначения. Из всех типов трехфазные асинхронные двигатели наиболее широко используются в промышленности, главным образом потому, что для них не требуется пусковое устройство.
Трехфазный асинхронный двигатель получил свое название от того факта, что ток ротора индуцируется магнитным полем, а не электрическими соединениями.
Принцип действия трехфазного асинхронного двигателя основан на создании вращающегося магнитного поля (r.м.ф.).
Создание вращающегося магнитного поля
Статор асинхронного двигателя состоит из нескольких перекрывающихся обмоток, смещенных на электрический угол 120 °. Когда первичная обмотка или статор подключены к трехфазному источнику переменного тока, создается вращающееся магнитное поле, которое вращается с синхронной скоростью.
Направление вращения двигателя зависит от последовательности фаз линий питания и порядка, в котором эти линии подключены к статору.Таким образом, изменение мест подключения любых двух первичных клемм к источнику питания изменит направление вращения на противоположное.
Число полюсов и частота приложенного напряжения определяют синхронную скорость вращения статора двигателя. Двигатели обычно имеют 2, 4, 6 или 8 полюсов. Синхронная скорость, термин, обозначающий скорость вращения поля, создаваемого первичными токами, определяется следующим выражением.
Синхронная скорость вращения = (120 x частота питания) / Число полюсов статора
Производство магнитного потока
Вращающееся магнитное поле в статоре — это первая часть работы.Чтобы создать крутящий момент и, таким образом, вращаться, роторы должны пропускать ток. В асинхронных двигателях этот ток исходит от проводников ротора. Вращающееся магнитное поле, создаваемое в статоре, пересекает проводящие стержни ротора и индуцирует электродвижущую силу (ЭДС).
Обмотки ротора асинхронного двигателя либо замкнуты через внешнее сопротивление, либо напрямую закорочены. Следовательно, ЭДС, индуцированная в роторе, заставляет ток течь в направлении, противоположном направлению вращающегося магнитного поля в статоре, и приводит к скручивающему движению или крутящему моменту в роторе.
Как следствие, скорость ротора не достигает синхронной скорости среднеквадратичного значения в статоре. Если бы скорости совпадали, ЭДС не было бы. индуцированный в роторе, ток не будет течь, и, следовательно, не будет создаваться крутящий момент. Разница между скоростями статора (синхронной скорости) и ротора называется скольжением.
Вращение магнитного поля в асинхронном двигателе имеет то преимущество, что не требуется никаких электрических соединений с ротором.
В результате получается мотор:- Самозапуск
- Взрывозащищенный (из-за отсутствия контактных колец или коммутаторов и щеток, которые могут вызвать искры)
- Прочная конструкция
- Недорого
- Легче в обслуживании
Быстрый ответ: каков принцип работы асинхронного двигателя с контактным кольцом
Этот двигатель работает по принципу закона электромагнитной индукции Фарадея.Когда обмотка статора возбуждается источником переменного тока, обмотка статора создает магнитный поток. Согласно закону электромагнитной индукции Фарадея, обмотка ротора индуцируется и генерирует ток магнитного потока.
Каков принцип работы асинхронного двигателя с контактным кольцом?
Контактные кольца на двигателе переменного тока с фазным ротором. Когда двигатель достигает рабочей скорости, щетки поднимаются с помощью пружин, а контактные кольца замыкаются накоротко через скользящую контактную планку. Добавление сопротивления к обмоткам ротора делает ток ротора более синфазным с током статора.
Что такое индукционное контактное кольцо?
Двигатель с фазным ротором, также известный как двигатель с фазным ротором, представляет собой тип асинхронного двигателя, в котором обмотки ротора соединены через контактные кольца с внешним сопротивлением. Регулировка сопротивления позволяет управлять характеристикой скорости / момента двигателя. Каждый полюс соединен последовательно с резистором переменной мощности.
Где мы используем контактные кольца?
Контактное кольцо — это метод электрического соединения неподвижного объекта с вращающимся узлом.Они используются во многих приложениях промышленной автоматизации и для такого оборудования, как башенные и стреловые краны, а также кабельные и шланговые намотчики, где часть может свободно вращаться, а основание зафиксировано.
В чем разница между контактным кольцом и разрезным кольцом?
В чем разница между коммутатором с разъемным кольцом и контактным кольцом? Разъемное кольцо изменяет направление тока каждые пол-оборота, в то время как коммутатор с контактным кольцом просто поддерживает соединение между движущимся ротором и неподвижным статором.
Как работает контактное кольцо?
КАК РАБОТАЕТ КОЛЬЦО? Контактное кольцо передает электрические сигналы и мощность через вращающийся интерфейс с помощью скользящих электрических контактов. Эти контакты обычно представляют собой вращающееся кольцо и неподвижную щетку или скребок, который скользит по поверхности кольца во время вращения.
Что вызывает пробуксовку двигателя?
Взаимодействие токов, протекающих в стержнях ротора, и вращающегося магнитного поля статоров создает крутящий момент. В реальной работе скорость ротора всегда отстает от скорости магнитного поля, что позволяет стержням ротора разрезать магнитные силовые линии и создавать полезный крутящий момент.Эта разница скоростей называется скоростью скольжения.
Почему он называется асинхронным двигателем?
Асинхронный двигатель основан на токах, индуцируемых в роторе вращающимся магнитным полем статора. Вот почему это называется индукционной машиной. По этой причине двигатель вращается с другой скоростью, чем поле статора, и поэтому вращается асинхронно.
Каковы применения асинхронного двигателя с контактным кольцом?
Асинхронный двигатель с контактным кольцом способен поддерживать максимальный крутящий момент при любом скольжении.Можно легко поддерживать даже высокий тормозной момент. Он в основном используется для высокого пускового момента, в котором используется внешнее сопротивление. Они могут помочь в регулировании скорости лифтов, железнодорожной тяги, лифтов и т. Д.
Почему в генераторах переменного тока используются контактные кольца?
Функция контактного кольца в генераторе переменного тока заключается в том, что это полые кольца, которые соединены с концами катушки якоря. Они помогают вращать катушку. Также они обеспечивают электрический контакт со щетками.Он действует как мост между неподвижным компонентом и вращающимся элементом.
Для чего нужны контактные кольца и щетки?
Щетки контактных колец помогают соединять оба конца обмоток и соединяются с тремя изолированными контактными кольцами. Когда работает электрическая машина, щетки начинают подниматься автоматически. После этого электрический ток и сигнал передаются непосредственно от статора к частям ротора.
В чем разница между индукцией с короткозамкнутым ротором и контактным кольцом?
Электродвигатель с контактным кольцом имеет щетки для передачи мощности, тогда как электродвигатель с короткозамкнутым ротором является бесщеточным.Потери меди в двигателе с фазовой обмоткой высоки по сравнению с двигателем с короткозамкнутым ротором. КПД электродвигателя с контактным кольцом низкий, тогда как электродвигатель с короткозамкнутым ротором имеет высокий КПД.
Что означает контактное кольцо?
Контактное кольцо — это электромеханическое устройство, которое позволяет передавать мощность и электрические сигналы от неподвижной конструкции к вращающейся. Контактное кольцо может использоваться в любой электромеханической системе, которая требует вращения при передаче энергии или сигналов.
Что происходит, когда скольжение равно нулю?
Нулевое скольжение означает, что скорость ротора равна синхронной скорости. Если ротор вращается с синхронной скоростью в направлении вращающегося магнитного поля, то не будет эффекта отсечения магнитного потока, не будет ЭДС в проводниках ротора, не будет тока в проводнике стержня ротора и, следовательно, не будет развития электромагнитного момента.
Каков принцип работы асинхронного двигателя?
Двигатель, работающий по принципу электромагнитной индукции, известен как асинхронный двигатель.Электромагнитная индукция — это явление, при котором электродвижущая сила индуцирует электрический проводник, когда он находится во вращающемся магнитном поле.
Что такое формула скольжения двигателя?
Скорость скольжения — это разница между синхронной скоростью и скоростью ротора. Скорость скольжения = Синхронная скорость — Скорость ротора = Ns -N. Скольжение, s = (Ns — N) / Ns.
Что такое скольжение в двигателе переменного тока?
«Скольжение» в асинхронном двигателе переменного тока определяется как: Когда скорость ротора падает ниже скорости статора или синхронной скорости, скорость вращения магнитного поля в роторе увеличивается, вызывая больший ток в обмотках ротора и создавая больший крутящий момент.Для создания крутящего момента требуется скольжение.
Какие типы асинхронных двигателей?
Типы асинхронных двигателей
- Асинхронные двигатели с расщепленной фазой.
- Асинхронный двигатель с конденсаторным пуском.
- Конденсаторный пуск и конденсаторный асинхронный двигатель.
- Асинхронный двигатель с экранированными полюсами.
Что такое 120 в формуле скорости двигателя?
Уравнение для синхронной скорости — скорость магнитного поля внутри статора двигателя составляет 120 x F / P, где F — приложенная частота в Гц, а P — количество полюсов (всегда кратное 2) в двигателе. обмотка.120 — это константа, которая дает ваш ответ в оборотах в минуту.
Что такое синхронная скорость?
: определенная скорость для машины переменного тока, которая зависит от частоты цепи питания, потому что вращающийся элемент проходит через одну пару полюсов для каждого изменения переменного тока.
Каковы преимущества асинхронного двигателя?
Асинхронный двигатель Преимущества:
- Асинхронные двигатели просты и прочны по конструкции.
- Асинхронные двигатели дешевле из-за отсутствия щеток, коммутаторов и контактных колец.
- Это двигатели, не требующие технического обслуживания, в отличие от двигателей постоянного тока и синхронных двигателей из-за отсутствия щеток, коммутаторов и контактных колец.
Что такое слип?
Комбинация — это нижнее белье женщины, которое надевается под платье или юбку.