


%d0%b0%d1%81%d0%b8%d0%bd%d1%85%d1%80%d0%be%d0%bd%d0%bd%d1%8b%d0%b9%20%d0%b4%d0%b2%d0%b8%d0%b3%d0%b0%d1%82%d0%b5%d0%bb%d1%8c%20%d1%81%20%d1%84%d0%b0%d0%b7%d0%bd%d1%8b%d0%bc%20%d1%80%d0%be%d1%82%d0%be%d1%80%d0%be%d0%bc — со всех языков на все языки
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАканАлтайскийАрагонскийАрабскийАстурийскийАймараАзербайджанскийБашкирскийБагобоБелорусскийБолгарскийТибетскийБурятскийКаталанскийЧеченскийШорскийЧерокиШайенскогоКриЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийВаллийскийДатскийНемецкийДолганскийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГэльскийГуараниКлингонскийЭльзасскийИвритХиндиХорватскийВерхнелужицкийГаитянскийВенгерскийАрмянскийИндонезийскийИнупиакИнгушскийИсландскийИтальянскийЯпонскийГрузинскийКарачаевскийЧеркесскийКазахскийКхмерскийКорейскийКумыкскийКурдскийКомиКиргизскийЛатинскийЛюксембургскийСефардскийЛингалаЛитовскийЛатышскийМаньчжурскийМикенскийМокшанскийМаориМарийскийМакедонскийКомиМонгольскийМалайскийМайяЭрзянскийНидерландскийНорвежскийНауатльОрокскийНогайскийОсетинскийОсманскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПортугальскийКечуаКвеньяРумынский, МолдавскийАрумынскийРусскийСанскритСеверносаамскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиШумерскийСилезскийТофаларскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийТувинскийТвиУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВьетнамскийВепсскийВарайскийЮпийскийИдишЙорубаКитайский
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАлтайскийАрабскийАварскийАймараАзербайджанскийБашкирскийБелорусскийБолгарскийКаталанскийЧеченскийЧаморроШорскийЧерокиЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийДатскийНемецкийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГалисийскийКлингонскийЭльзасскийИвритХиндиХорватскийГаитянскийВенгерскийАрмянскийИндонезийскийИнгушскийИсландскийИтальянскийИжорскийЯпонскийЛожбанГрузинскийКарачаевскийКазахскийКхмерскийКорейскийКумыкскийКурдскийЛатинскийЛингалаЛитовскийЛатышскийМокшанскийМаориМарийскийМакедонскийМонгольскийМалайскийМальтийскийМайяЭрзянскийНидерландскийНорвежскийОсетинскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПуштуПортугальскийКечуаКвеньяРумынский, МолдавскийРусскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиТамильскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВодскийВьетнамскийВепсскийИдишЙорубаКитайский
17 Пуск двигателя с фазным ротором с помощью пускового реостата
Пуск двигателя с фазным ротором с помощью пускового реостата.
Двигатели с фазным ротором применяются значительно реже двигателей с короткозамкнутым ротором. Они используются в следующих случаях:
1) когда двигатели с короткозамкнутым ротором неприемлемы по условиям регулирования их скорости вращения;
2) когда статический момент сопротивления на валу при пуске Мст велик и поэтому асинхронный двигатель с короткозамкнутым ротором с пуском при пониженном напряжении неприемлем, а прямой пуск такого двигателя недопустим по условиям воздействия больших пусковых токов на сеть;
3) когда приводимые в движение массы настолько велики, что выделяемая во вторичной цепи двигателя тепловая энергия вызывает недопустимый нагрев обмотки ротора в виде беличьей клетки.
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора. Применяются проволочные, с литыми чугунными элементами, а также жидкостные реостаты. По условиям нагрева реостаты рассчитываются на кратковременную работу. Сопротивления металлических- реостатов для охлаждения обычно помещают в бак с трансформаторным маслом. Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически (в автоматизированных установках) с помощью контакторов или контроллера с электрическим приводом. Жидкостный реостат представляет собой сосуд с электролитом (например, водный раствор соды или поваренной соли), в который опущены электроды.
Сопротивления металлических- реостатов для охлаждения обычно помещают в бак с трансформаторным маслом. Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически (в автоматизированных установках) с помощью контакторов или контроллера с электрическим приводом. Жидкостный реостат представляет собой сосуд с электролитом (например, водный раствор соды или поваренной соли), в который опущены электроды.
Рекомендуемые файлы
Сопротивление реостата регулируется путем изменения глубины погружения электродов.
Рассмотрим пуск двигателя с фазным ротором с помощью ступенчатого металлического реостата, управляемого контакторами К.
Перед пуском щетки должны быть опущены на контактные кольца ротора, а все ступени реостата включены. Далее в процессе пуска поочередно включаются контакторы КЗ, К. 2, К1. Характеристики вращающего момента двигателя М = f (s) и вторичного тока I2=f (s) при работе на разных ступенях реостата изображены на рис.
2, К1. Характеристики вращающего момента двигателя М = f (s) и вторичного тока I2=f (s) при работе на разных ступенях реостата изображены на рис.
Предположим, что сопротивления ступеней пускового реостата и интервалы времени переключения ступеней подобраны так, что момент двигателя М при пуске меняется в пределах от некоторого Ммакс до некоторого Ммин и при включении в сеть (кривая 3 на рис.а). В начале пуска двигатель работает по характеристике 3, ротор приходит во вращение, скольжение s начинает уменьшаться, и при s=s3, когда М=Mмин, производится переключение реостата на вторую ступень. При этом двигатель будет работать по характеристике 2, и при дальнейшем разбеге двигателя скольжение уменьшится от s=s3,, до s=s2, а момент — от значения М = Ммаксдо М = Ммин. Затем производится переключение на первую ступень и т. д. После выключения последней
Затем производится переключение на первую ступень и т. д. После выключения последней
Если Вам понравилась эта лекция, то понравится и эта — 4 Целочисленное программирование.
ступени реостата двигатель переходит на работу по естественной характеристике 0 и достигает установившейся скорости вращения.
При наличии у двигателя короткозамыкающего механизма после окончания пуска щетки с помощью этого механизма поднимаются с контактных колец и кольца замыкаются накоротко, а реостат возвращается в пусковое положение. Тем самым пусковая аппаратура приводится в готовность к следующему пуску. Необходимо отметить, что дистанционное управление короткозамыкающим механизмом контактных колец сложно осуществить; это затрудняет автоматическое управление двигателем. Поэтому в последнее время фазные асинхронные двигатели строятся без таких механизмов. При этом щетки постоянно налегают на контактные кольца, что несколько увеличивает потери двигателя и износ щеток. Количество ступеней пускового реостата с целью упрощения схемы пуска и удешевления аппаратуры в автоматизированных установках выбирается небольшим (обычно 2—3 ступени).
Количество ступеней пускового реостата с целью упрощения схемы пуска и удешевления аппаратуры в автоматизированных установках выбирается небольшим (обычно 2—3 ступени).
Пусковые характеристики асинхронного двигателя при реостатном пуске наиболее благоприятны, так как высокие значения моментов достигаются при невысоких значениях пусковых токов.
Что такое асинхронный двигатель с фазным ротором и где он используется | ЭТМ для профессионалов
Устройство и принцип работы асинхронного двигателя с фазным ротором и с короткозамкнутым ротором в целом похожи, основные отличия лежат в конструкции этого самого ротора, схеме подключения и принципе запуска.
Устройство и принцип работы
Основные элементы асинхронной машины — это статор и ротор. Статор – это неподвижный элемент электрической машины, который состоит из сердечника с обмоткой. В статор помещается вращающийся ротор — вал, на котором расположен сердечник с короткозамкнутой (у АД с КЗ-ротором) или изолированной обмоткой (у АД с фазным ротором).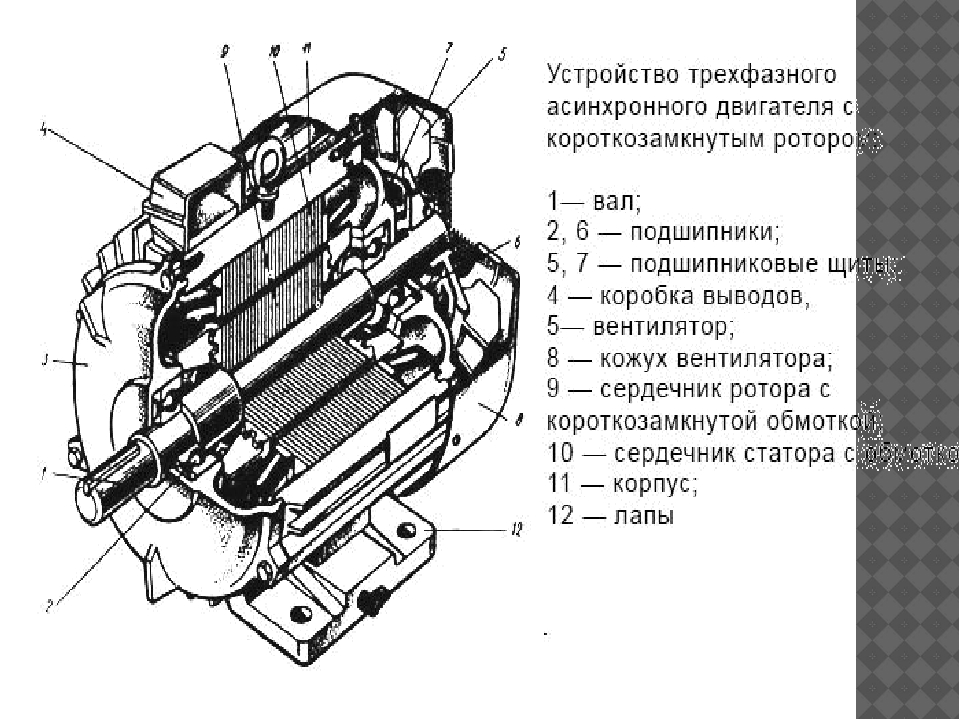
Так как магнитный поток в асинхронном двигателе переменный, сердечник статора изготавливается шихтованными, то есть он состоит из набора тонких пластин, которые изолируются друг от друга окалиной и покрываются лаком. Это нужно для снижения вихревых токов и потерь.
Рисунок 1 – устройство асинхронного двигателя с фазным роторомРисунок 1 – устройство асинхронного двигателя с фазным ротором
В сердечнике есть пазы, в которые укладывается трёхфазная обмотка. А сам сердечник запрессовывается в литую станину – корпус двигателя.
Обмотка статора – состоит из катушек, намотанных медным проводником и расположенных в статоре так, что их геометрические оси сдвинуты в пространстве друг относительно друга на 120 градусов, как и фазы в трёхфазной системе питания. Обмотки статора соединяются по схеме звезды или треугольника.
Рисунок 2 — Расположение обмоток статораРисунок 2 — Расположение обмоток статора
На фазном роторе размещены три изолированные обмотки, соединённые по схеме звезды.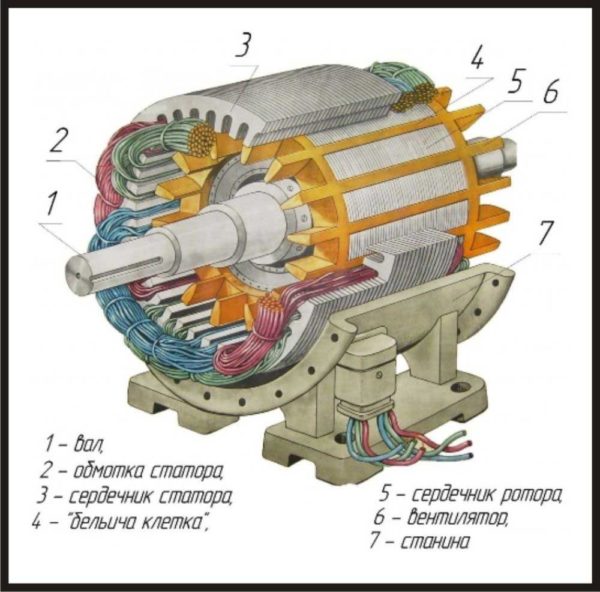 Сердечник ротора также, как и статора набирается из штампованных листов электротехнической стали. Свободные концы обмоток выведены к контактным кольцам. Для съёма тока с колец используются щётки, закреплённые на щёткодержателях.
Сердечник ротора также, как и статора набирается из штампованных листов электротехнической стали. Свободные концы обмоток выведены к контактным кольцам. Для съёма тока с колец используются щётки, закреплённые на щёткодержателях.
Рисунок 3 — Устройство фазного ротора
Принцип действия асинхронного двигателя с фазным ротором такой же, как и у двигателя с короткозамкнутым ротором— вращающееся магнитное поле статора пересекая проводники обмотки ротора индуктирует в них ЭДС. Если обмотка ротора замкнута, то ЭДС порождает электрический ток. В результате взаимодействия этого тока с магнитным полем статора возникает электромагнитный момент и ротор начинает вращаться.
Частота вращения магнитного поля или синхронная частота n1 рассчитывается по формуле:
n1=60f/p ,
где f – частота питающей сети, а p – число пар полюсов обмотки статора. У двигателя с одной парой полюсов она равна 3000 об/мин.
Частота вращения ротора n2 немного ниже, и её можно посчитать по формуле:
n2=n1*(1-S )=(f1×60/p)(1-s), где n1 – синхронная частота, S – скольжение.
Скольжение S – это величина, которая выражает разницу между частотой вращения вала и частотой вращения магнитного поля статора у асинхронного двигателя, рассчитывается по формуле:
S =((n1-n2)/n1)*100%.
Величина скольжения у разных двигателей отличается, зачастую указывается на шильдике и обычно лежит в пределах 2-8%.
Итак, частота вращения ротора любого АД определяется скольжением, частотой питающей сети и числом пар полюсов в обмотке статора.
Начнём с конца — изменить число полюсов в обмотке односкоростного двигателя в процессе работы не получится — для этого есть многоскоростные двигатели, у которых изначально обмотка рассчитана на переключения.
Для изменения частоты тока используют частотные преобразователи. Раньше они не были слишком распространены из-за высокой стоимости, но в последнее время используются всё чаще и всё в большем количестве задач.
Раньше они не были слишком распространены из-за высокой стоимости, но в последнее время используются всё чаще и всё в большем количестве задач.
Изменять скольжение для регулировки частоты вращения АД можно:
- Изменением питающего напряжения, подводимого к обмотке статора.
- Нарушением симметрии питающего напряжения.
- Изменением активного сопротивления обмотки ротора.
Регулировка частоты вращения двигателя изменением скольжения возможно только для нагруженного двигателя. То есть на холостом ходу его вал всё равно будет вращаться со скоростью близкой к номинальной.
Величину питающего напряжения обычно изменяют с помощью регулировочных автотрансформаторов или включают реакторы в разрыв линейных проводов (последовательно с обмоткой статора), такой способ используется с асинхронными двигателями с короткозамкнутым ротором.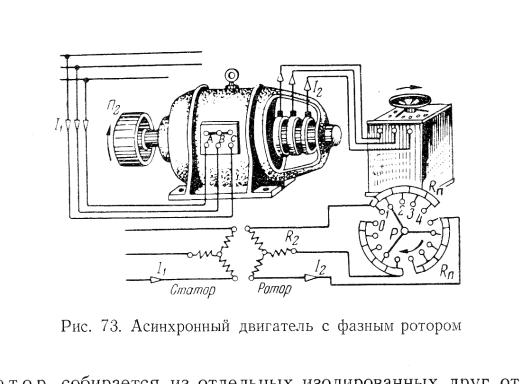
Изменение скольжения за счёт изменения активного сопротивления обмотки ротора возможно только на асинхронных двигателях с фазным ротором, как отмечалось выше, к кольцам ротора подключаются, через щётки, резисторы или реостат. При движении бегунка реостата изменяется его сопротивление, так как реостат подключён к обмотке ротора, то при этом изменяется активное сопротивление в цепи ротора.
Рисунок 4 — Схема фазного ротора с подключённым регулировочным реостатомРисунок 4 — Схема фазного ротора с подключённым регулировочным реостатом
При увеличении активного сопротивления обмотки ротора увеличивается скольжение, соответствующее заданному нагрузочному моменту. Говоря простым языком – при одной и той же нагрузке на двигатель, при увеличении скольжения будут уменьшаться обороты ротора. По той же причине при увеличении активного сопротивления ротора увеличивается и пусковой момент.
Рисунок 5 — Влияние активного сопротивления обмотки ротора на механическую характеристику асинхронного двигателяРисунок 5 — Влияние активного сопротивления обмотки ротора на механическую характеристику асинхронного двигателя
Зависимость скольжения от сопротивления определяется по формуле:
Предлагаю не вдаваться в подробности и не рассматривать эти вопросы глубже, чтобы не увеличивать объём статьи, а просто запомнить – чем больше активное сопротивление обмоток – тем меньше обороты ротора при той же нагрузке. Давайте перейдём к практике, а именно рассмотрим схему подключения.
Давайте перейдём к практике, а именно рассмотрим схему подключения.
Схема подключения
Разбирать схему включения асинхронного двигателя с фазным ротором будем на примере схемы плавного пуска.
Рисунок 6 — Схема запуска асинхронного двигателя с фазным ротором с выведением резисторов по задержке времениРисунок 6 — Схема запуска асинхронного двигателя с фазным ротором с выведением резисторов по задержке времени
Схему условно можно разделить на 2 цепи – силовую и управления. Силовая цепь состоит из автоматического выключателя QF , контактора КМ1, теплового реле КК, включённого в разрыв питающего двигатель кабеля и самого двигателя. Контактор КМ1 подаёт напряжение на обмотку статора. Контакторы КМ2, КМ3 и КМ4 шунтируют (выводят из цепи) резисторы, соединённые с обмоткой ротора. Резисторы, кстати, соединяются тоже по схеме звезды.
Рисунок 7 — Силовая часть схемыРисунок 7 — Силовая часть схемы
Цепь управления состоит из катушки контактора двигателя КМ1, подключённой по стандартной схеме с самоподхватом через нормально замкнутый контакт теплового реле КК. И цепи управления контакторами резисторов КМ2, КМ3 и КМ4, реле времени КТ1, КТ2 и КТ3. При срабатывании теплового реле, контакт КК разомкнётся и отключит контактор КМ1 и все цепи обесточатся – и двигатель, и цепь управления.
И цепи управления контакторами резисторов КМ2, КМ3 и КМ4, реле времени КТ1, КТ2 и КТ3. При срабатывании теплового реле, контакт КК разомкнётся и отключит контактор КМ1 и все цепи обесточатся – и двигатель, и цепь управления.
Рисунок 8 — Цепь управления
При включении автомата QF напряжение через нормально замкнутую кнопку SB2 (СТОП) поступает на нормально разомкнутую кнопку SB1 (ПУСК). При нажатии на кнопку SB1 напряжение подаётся на контактор катушку контактора КМ1, в результате чего нормально разомкнутые контакты КМ1.1, КМ1.2.
КМ1.1 запитает цепь из реле времени КТ1, КТ2, КТ3 и контакторов управляющих резисторами в цепи ротора КМ2, КМ3, КМ4.
КМ1.2 замкнётся и будет удерживать контактор КМ1 во включённом состоянии – это называют самоподхватом, когда контактор удерживается во включенном состоянии за счет того, что катушка питается через контакт этого же самого контактора.
Начнётся «процесс» запуска двигателя.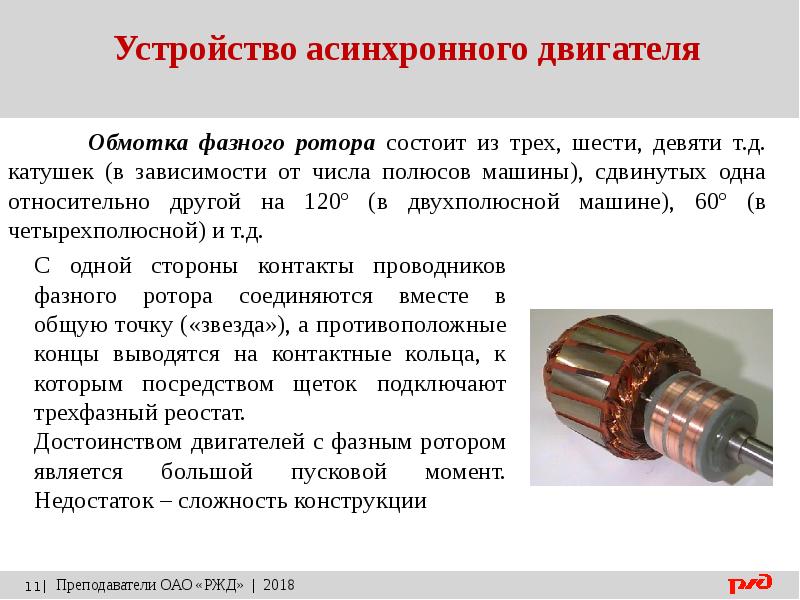 В первый момент времени, когда вал ещё не вращается к нему подключены все сопротивления, ток ротора, наводимый вращающимся магнитным полем, будет протекать через всю цепочку, а его значение будет минимальным.
В первый момент времени, когда вал ещё не вращается к нему подключены все сопротивления, ток ротора, наводимый вращающимся магнитным полем, будет протекать через всю цепочку, а его значение будет минимальным.
Реле времени КТ1, КТ2 и КТ3 настроены на определённую задержку времени, через которую они будут включаться. Время задержки настраиваться для каждого конкретного случая, в зависимости от режима запуска и работы двигателя, нагрузки на его валу. Поэтому опустим конкретные цифры, просто примем, что эти реле включаются одно за другим.
По истечении времени задержки КТ1 включится и включит контактор КМ2, тем самым выведет из цепи первую цепочку сопротивлений. Активное сопротивление ротора уменьшится, уменьшиться и его скольжение, а значит обороты станут больше при том же моменте.
Двигатель продолжит разворачиваться и по истечении времени задержки КТ2 сработает, включит КМ3 и выведет из цепи ротора следующую цепочку резисторов, сопротивление ротора уменьшится ещё больше, вал начнёт вращаться ещё быстрее и так далее. .. Такой процесс будет повторяться столько раз, сколько ступеней резисторов подключено к ротору, что вы и можете видеть на следующей анимации.
.. Такой процесс будет повторяться столько раз, сколько ступеней резисторов подключено к ротору, что вы и можете видеть на следующей анимации.
Так и происходит плавный пуск асинхронного двигателя с фазным ротором, таким образом, повышается пусковой момент и снижается пусковой ток. Но из-за того, что двигатель работает, по сути своей, как трансформатор – то ток, протекающий через резисторы ротора, преобразуется в тепло. То есть КПД двигателя в таких режимах низкая.
Аналогичным способом происходит и регулировка частоты вращения АД с фазным ротором, только цепочки резисторов подключаются/отключаются не автоматически, а вручную. Например, на грузоподъёмных кранах для этого используют командоконтроллеры.
Командоконтроллер — это коммутационный аппарат с множеством контактов, которые переключаются с помощью рычага с несколькими фиксированными положениями, как у рычага автоматической коробки передач автомобиля. При переводе рычага в каждое из положений соединяются разные группы контактов и замыкают соответствующие определённым режимам работы (скоростям) двигателя цепи.
Рисунок 10 – Коммутационные аппараты для управления грузоподъёмным краном
На современных кранах используются миниатюрные и более комфортные для крановщика джойстики, кроме габаритов их конструкция ничем особо не отличается, за исключением того, что один аппарат может управлять перемещением тележки крана в разных направлениях (продольное и поперечное).
Рисунок 11 — Джойстик для управления краномРисунок 11 — Джойстик для управления краном
Резисторы для двигателя с фазным ротором выполняются в виде спиралей, свитых из металлических лент или проволоки (фехралевой, константановой ) и закреплённых на шасси.
Рисунок 12 — Блок резисторов БФК ИРАК 434.334.001-41Рисунок 12 — Блок резисторов БФК ИРАК 434.334.001-41
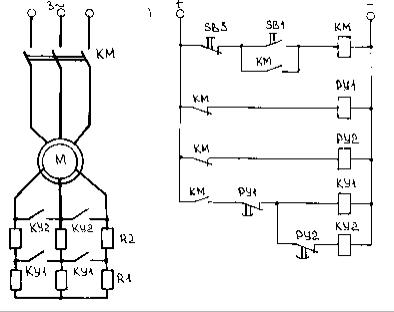
Пример схемы управления двигателем грузоподъёмного механизма вы видите ниже. Здесь в средней части схемы пунктирными линиями изображены положения контактной группы командоконтроллера.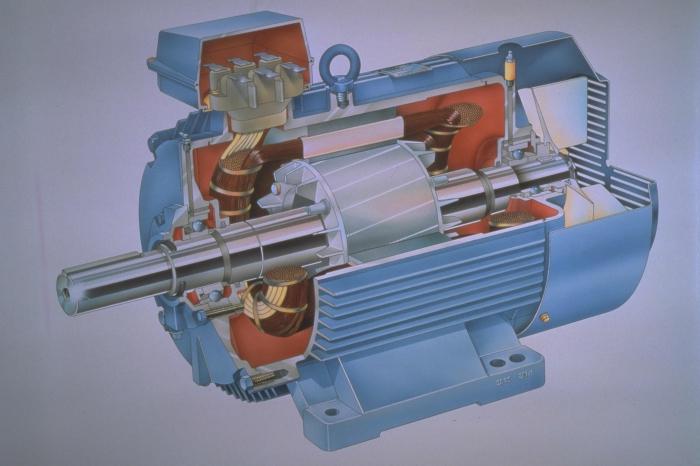 В остальном схема почти аналогична рассмотренной в статье, а основные отличия в том, что вместо реле времени установлен командоконтроллер, а двигатель подключен по реверсивной схеме.
В остальном схема почти аналогична рассмотренной в статье, а основные отличия в том, что вместо реле времени установлен командоконтроллер, а двигатель подключен по реверсивной схеме.
Рисунок 13 — Схема управления двигателя грузоподъёмного механизма с реверсивным включением двигателя
Заключение
У асинхронного двигателя с фазным ротором лучшие пусковые и регулировочные свойства, но у него больше масса, размеры и стоимость, чем у двигателя с короткозамкнутым ротором. Из-за включения резисторов в цепь ротора снижается КПД двигателя в режиме, когда ротор вращается с пониженной скоростью. Для получения большего КПД используют двигатели с преобразователями частоты.
Алексей Бартош специально для ЭТМ
ГЭУ переменного тока с асинхронным гребным электродвигателем с фазным ротором
Гребные- электрические установки с асинхронными электродвигателями с фазными роторами обладают более высокими маневренными качествами по сравнению с другими ГЭУ переменного тока.
Принципиальная схема ГЭУ переменного тока с асинхронным электродвигателем с фазным ротором представлена на рис. 81. Схема включает в себя приводной двигатель ЯД, синхронный генератор Г, гребной электродвигатель Д, реверсивный переключатель РП, реостат Rper и возбудительный агрегат, состоящий из генератора постоянного тока — возбудителя В и его приводного двигателя — короткозамкнутого асинхронного электродвигателя АД.
Рис. 1. Схемы главного тока ТЭГУ переменного тока.
Рис. 2. Схема главного тока ДЭГУ переменного тока.
Возбудительный агрегат предназначен для питания обмотки возбуждения генератора. Приводной двигатель возбудителя включается в общесудовую сеть переменного тока. Навешивание возбудителя на приводной двигатель генератора обычно не применяется из-за необходимости изменения угловой скорости генераторов.
Рис. 3. Принципиальная схема ГЭУ переменного тока с асинхронным гребным электродвигателем с фазным ротором.
Как всякий электродвигатель переменного тока, асинхронный двигатель с фазным ротором состоит из статора и ротора.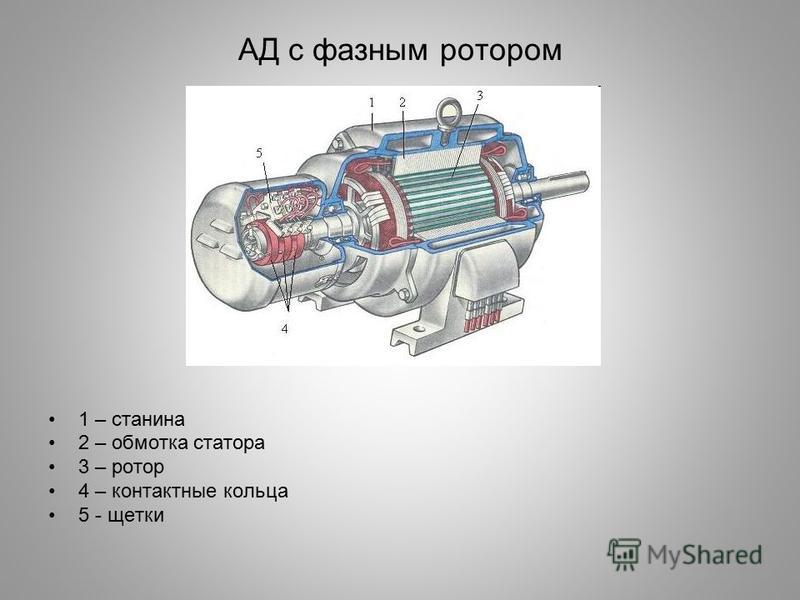
Особенностью двигателя является наличие трехфазной обмотки на роторе, каждая фаза которой выведена на контактное кольцо. Посредством трех контактных колец, установленных на валу ротора, и скользящих контактов — щеток трехфазная обмотка ротора выведена на регулируемый трехфазный реостат /?рег. Наличие реостата в цепи ротора асинхронного электродвигателя позволяет в определенных пределах осуществлять плавное регулирование угловой скорости гребного вйла.
Вращающееся магнитное поле статора, пересекая обмотку ротора, наводит в ней э. д. е., а так как эта обмотка замкнута через контактные кольца на сопротивление реостата, то по ней потечет ток. Ток обмотки ротора, взаимодействуя с вращающимся магнитным потоком статора, образует вращающий момент ротора, вызывающий вращение ротора двигателя.
На рис. 82 приведены механические характеристики асинхронного гребного электродвигателя с фазным ротором при различных сопротивлениях в цепи ротора. Как видно из этого рисунка, увеличение сопротивления ротора увеличивает наклон механической характеристики и критическое скольжение и снижает значение угловой скорости двигателя при одном и том же значении вращающего момента.
Как видно из этого рисунка, увеличение сопротивления ротора увеличивает наклон механической характеристики и критическое скольжение и снижает значение угловой скорости двигателя при одном и том же значении вращающего момента.
Вращающий момент Ми двигателя при включении статора и при угловой скорости, равной нулю, называется пусковым или начальным моментом. Его величина при выведенном реостате в цепи ротора, т. е. при работе двигателя на естественной механической характеристике, составляет (1 — 1,8)Мном. Введение сопротивления в цепь ротора увеличивает пусковой момент двигателя.
Рис. 4. Механические характеристики гребного асинхронного электродвигателя с фазным ротором.
Помимо использования реостата в цепи ротора возможны еще два способа регулирования угловой скорости гребного асинхронного электродвигателя с фазным ротором:
1) изменением числа пар полюсов обмоток статора и ротора и 2) изменением частоты напряжения, подводимого к двигателю. Эти способы вытекают из рассмотрения уравнения угловой скорости двигателя:
Первый из указанных способов практически не применяется, так как требует использования более дорогого и тяжелого гребного двигателя специальной конструкции, имеющего несколько обмоток с различным числом пар полюсов или одну обмотку, допускающую переключение числа пар полюсов статора и ротора. Кроме того, регулирование получается ступенчатым с небольшим количеством ступеней (две — три).
Кроме того, регулирование получается ступенчатым с небольшим количеством ступеней (две — три).
На рис. 5,а показаны механические характеристики гребного асинхронного электродвигателя при изменении частоты питающего напряжения. Как видно, этот способ обеспечивает плавное регулирование скорости, диапазон которого зависит от диапазона регулирования угловой скорости приводного двигателя синхронного генератора. Необходимость регулирования угловой скорости приводного двигателя намного снижает достоинства рассматриваемого способа регулирования угловой скорости гребного электродвигателя. Регулирование частотой применяется обычно при пусках и реверсах гребного электродвигателя.
Рис. 5. Механические характеристики асинхронного электродвигателя при изменении частоты (а) и напряжения (б).
Большое влияние на электромеханические свойства гребного асинхронного электродвигателя оказывает величина подводимого к двигателю напряжения. Изменение ее очень мало влияет на угловую скорость двигателя, так как синхронная угловая скорость поля от напряжения не зависит.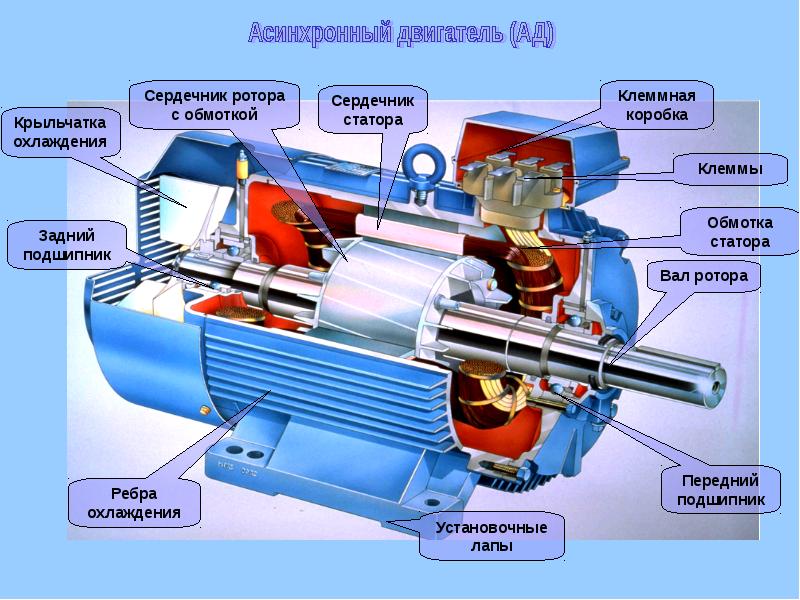
Зависимость вращающего момента асинхронного гребного электродвигателя от напряжения широко используется для форсирования реверса ГЭУ и реверса судна.
Принципиально для реверсирования асинхронного гребного электродвигателя достаточно переключить две фазы его статора с помощью реверсивного переключателя. В этом случае направление вращения магнитного поля статора изменяется на противоположное и двигатель реверсируется.
Однако особенности работы асинхронного электродвигателя в составе гребной электрической установки существенно усложняют операции по реверсированию двигателя.
Прежде всего перед отключением и переключением реверсивного переключателя необходимо снять возбуждение синхронного генератора, чтобы переключение цепи главного тока осуществлялось без напряжения. Это позволяет намного упростить конструкцию реверсивного переключателя. Кроме того, простое переключение с целью реверсирования двух фаз двигателя значительно затягивает реверсирование судна.
Это позволяет намного упростить конструкцию реверсивного переключателя. Кроме того, простое переключение с целью реверсирования двух фаз двигателя значительно затягивает реверсирование судна.
Действительно, рассмотрим совместно реверсивную характеристику гребного винта и механические характеристики асинхронного двигателя в период реверсирования.
Работа ГЭУ при направлении вращения гребного электродвигателя, соответствующем полному ходу вперед, характеризуется точкой В— точкой пересечения механической характеристики двигателя ABCDE с характеристикой момента сопротивления на гребном валу Мв. В этом режиме двигатель вращается с номинальной угловой скоростью и развивает номинальный вращающий момент.
Рис. 6. Реверсивные характеристики ГЭУ с асинхронным гребным электродвигателем.
При значительных скольжениях существенно возрастает частота тока в роторе, равная частоте тока в статоре, умноженной на скольжение. Вместе с тем соответственно увеличивается индуктивное сопротивление ротора, пропорциональное частоте тока статора. В результате ощутимо снижается величина cos ср2.
В результате ощутимо снижается величина cos ср2.
Описанные явления приведут к тому, что, работая в режиме, характеризуемом точкой Еь двигатель будет обтекаться значительным током, перегревающим машину,“ а развиваемый момент будет очень малым. Гребной электродвигатель в этих условиях не сможет не только реверсировать гребной винт, но даже затормозить его, и время реверса недопустимо затянется.
Необходимо принимать эффективные меры по значительному увеличению момента асинхронного двигателя в период реверсирования судна. Возможны три способа приведения вращающего момента гребного асинхронного электродвигателя с фазным ротором в соответствие с моментом сопротивления на валу в период реверсирования:
1) снижение частоты, 2) введение сопротивления в цепь ротора и 3) увеличение напряжения, подводимого к двигателю, путем увеличения тока возбуждения генератора. Влияние каждого из этих способов на форму механической характеристики двигателя рассмотрено выше.
Обычно реверсирование ГЭУ осуществляется с одновременным использованием всех трех указанных способов. В результате процесс реверсирования ГЭУ с асинхронным электродвигателем с фазным ротором протекает следующим образом.
В результате процесс реверсирования ГЭУ с асинхронным электродвигателем с фазным ротором протекает следующим образом.
Рис. 7. Реверсивные характеристики ГЭУ с асинхронным гребным электродвигателем при изменении частоты, сопротивления в цепи ротора и подводимого напряжения.
Перед реверсированием снижается угловая скорость приводного двигателя синхронного генератора по сравнению с номинальной. Соответственно снижается частота напряжения, подводимого к двигателю, и его механическая характеристика приобретает форму кривой. Далее снимается возбуждение с синхронного генератора, переключается реверсивный переключатель, в цепь ротора двигателя вводится сопротивление, увеличивается возбуждение синхронного генератора до максимального, и критический (максимальный) момент двигателя значительно возрастает. После того как винт реверсируется, фор-сировка возбуждения генератора снимается, сопротивление из цепи ротора двигателя выводится, угловая скорость двигателя и частота тока увеличиваются, а вместе с этим угловая* скорость гребного вала также увеличивается при вращении винта в обратную сторону.
Обладая относительно высокими маневренными качествами, гребные асинхронные электродвигатели с фазным ротором наряду с этим имеют и существенные недостатки. Коэффициент полезного действия и coscp этих двигателей ниже, чем у синхронных, причем значения коэффициента мощности особенно снижаются при перегрузках. В результате при одинаковой мощности на гребном валу для питания асинхронного двигателя потребуется генератор более мощный, чем для питания синхронного двигателя. Наличие пусковых и регулировочных сопротивлений также увеличивает массу и стоимость ГЭУ в целом, а наличие контактных колец на роторе снижает надежность установки. Эксплуатация ГЭУ с асинхронными двигателями с фазным ротором, в частности при осуществлении частых реверсов, связана с необходимостью в строгой последовательности манипулировать частотой и напряжением генераторов и сопротивлениями в цепи ротора гребного электродвигателя.
Отмеченные недостатки в большой мере ограничивают область применения ГЭУ переменного тока с асинхронными гребными электродвигателями с фазным ротором.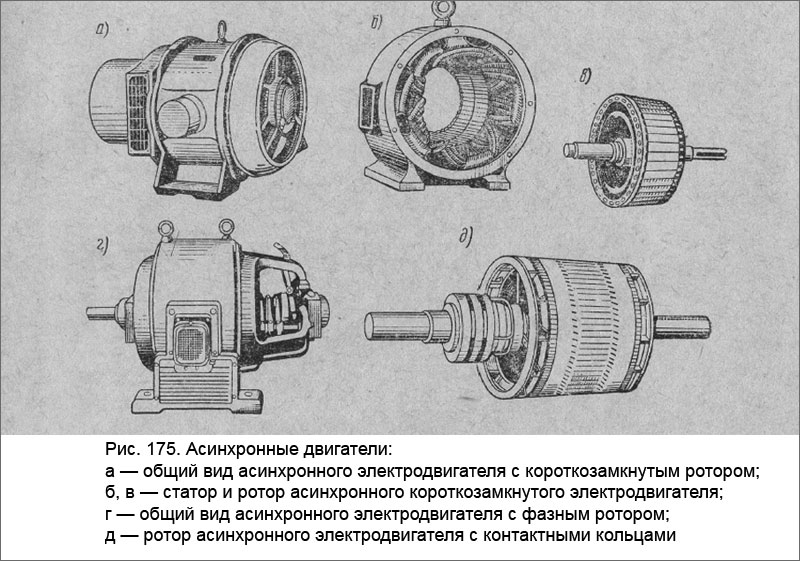
Все, что вам нужно знать о двигателях с контактным кольцом
Известны ли вам как электродвигатели с контактным кольцом или электродвигатели с фазным ротором, эти электродвигатели могут спасти жизнь.
Тем не менее, вы можете задаться вопросом, как двигатели с контактным кольцом могут помочь вам в решении ваших проектных требований?
В этом руководстве вы найдете все, что вам нужно знать о работе электродвигателей с контактными кольцами. Это также даст вам возможность сравнить асинхронные двигатели с контактным кольцом и с короткозамкнутым ротором.
Без лишних слов, приступим.
ЧТО ТАКОЕ ДВИГАТЕЛЬ СО СКОЛЬЖНЫМ КОЛЬЦОМ?
Начнем с самого начала.
Асинхронный двигатель состоит из двух основных частей: статора и ротора. Статор — это статическая часть асинхронного двигателя, а ротор — это вращающаяся часть.
Просто, правда?
Разница между асинхронным двигателем с короткозамкнутым ротором и контактным кольцом заключается в роторе.
В трехфазном асинхронном двигателе с контактным кольцом ротор имеет трехфазную обмотку на обмотке.
Каждый вывод обмотки подключается к отдельным контактным кольцам. Контактные кольца позволяют вносить в схему сопротивление (сопротивление).
Вот так выглядит схема асинхронного двигателя с контактным кольцом:
В результате добавленного сопротивления ток ротора больше синфазен с током статора. Это создает больший крутящий момент при запуске.
Наука, лежащая в основе электродвигателя с контактными кольцами
Конструкция электродвигателя с контактным кольцом позволяет токосъемному кольцу управлять выходной мощностью двигателя.
Когда вы запускаете трехфазный асинхронный двигатель с контактным кольцом, полюса статора создают вращающееся магнитное поле, как и в любом асинхронном двигателе.
Ротор с контактным кольцом имеет дополнительное внешнее сопротивление.
Когда токи ротора и статора больше совпадают по фазе, мы получаем больший крутящий момент.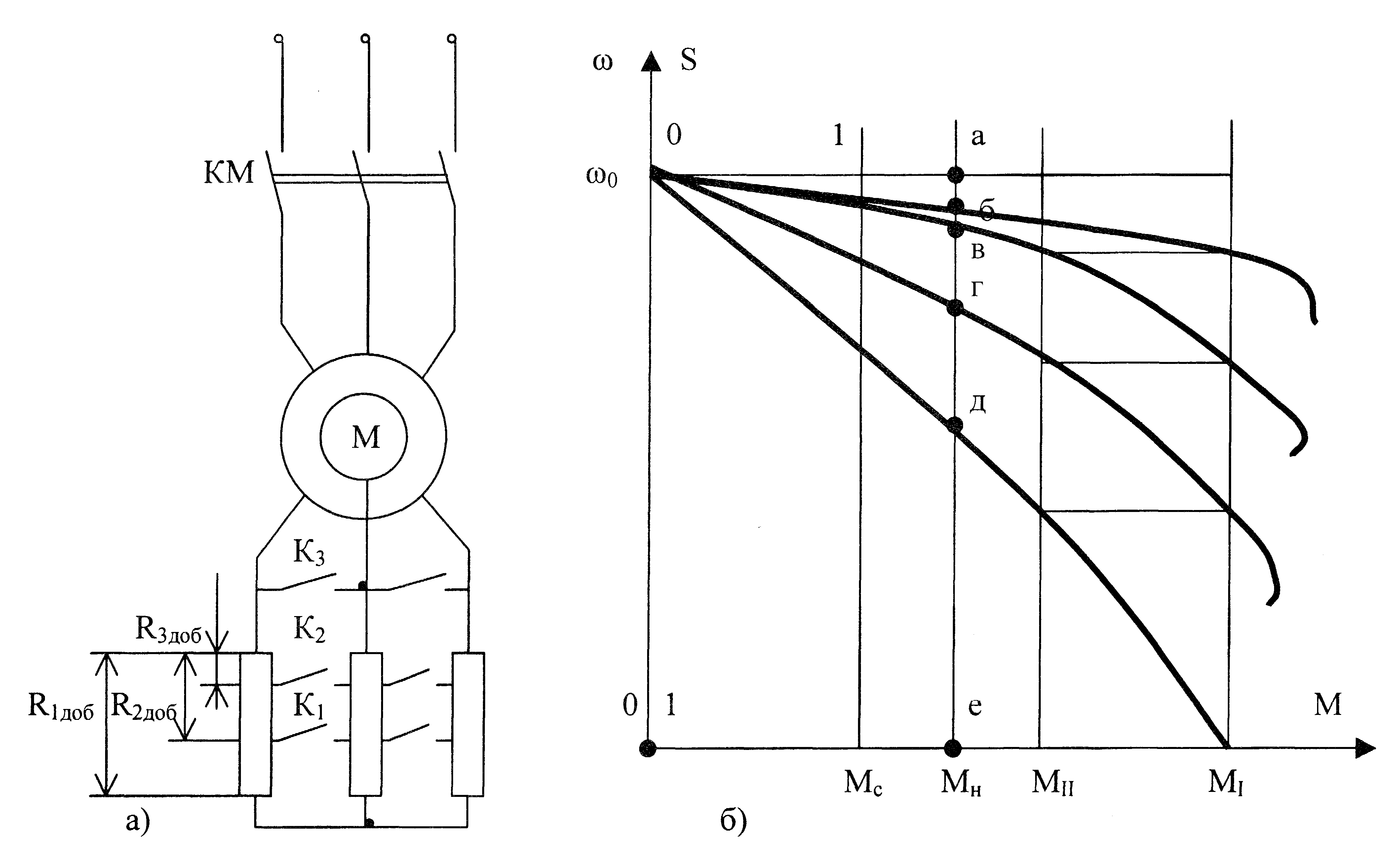 Кроме того, внешнее сопротивление, добавленное контактными кольцами, снижает потребность в пусковом токе.
Кроме того, внешнее сопротивление, добавленное контактными кольцами, снижает потребность в пусковом токе.
Раз уж они так важны, что такое контактное кольцо?
Контактное кольцо — это устройство, которое может передавать мощность, электрические сигналы или данные от статического источника к вращающемуся.
В двигателе коммутатор контактных колец поддерживает соединение между ротором и статором
Контактные кольца обычно изготавливаются из токопроводящих материалов, таких как сплавы меди или золота. Иногда их изготавливают из серебра или монетного серебра.
В этом случае контактные кольца асинхронного двигателя изготавливаются из меди или медных сплавов.
Контактные кольца используются во многих отраслях промышленности.
Машины для розлива молока в бутылки? Они используют контактные кольца.А Международная космическая станция? У него есть контактные кольца, которые помогают управлять солнечными батареями, питающими станцию.
Компания Moflon гордится тем, что предлагает высококачественные контактные кольца и инновационные технологии в этой области.
НАЗНАЧЕНИЕ ИНДУКЦИОННЫХ ДВИГАТЕЛЕЙ со скользящим кольцом?
Есть много мест, где можно найти электродвигатели с контактным кольцом.
К наиболее распространенным из них относятся краны, мельницы, подъемники и конвейеры. Все они обладают такими преимуществами контактных колец, как:
- Регулировка скорости — вам легко добиться плавного ускорения даже при больших нагрузках.Электродвигатели с контактным кольцом помогают регулировать скорость лифтов, железнодорожной тяги, лифтов и т. Д.
- Высокоинерционные нагрузки — если вам нужно перемещать большие грузы, лучше всего использовать электродвигатель с контактным кольцом. Кроме того, вы сэкономите немного денег из-за эффективности пускового тока.
Ладно, если моторы с контактными кольцами такие крутые, то зачем вообще возиться с беличьими клетками?
Ну, конечно, есть кое-что, что нужно учесть.
Одной из основных проблем двигателей с контактным кольцом является то, что их обслуживание дороже, чем с короткозамкнутым ротором.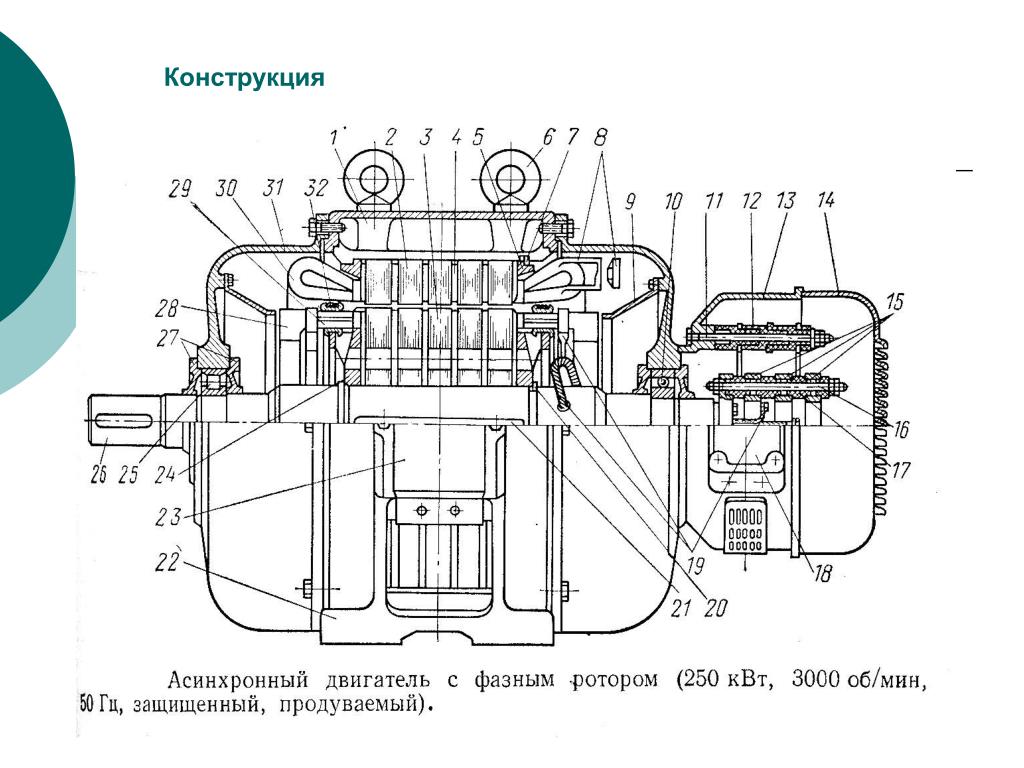 В основном это связано с износом щеток контактных колец.
В основном это связано с износом щеток контактных колец.
Электродвигатель с контактным кольцом также менее эффективен при малых нагрузках по сравнению с электродвигателем с короткозамкнутым ротором и чувствителен к колебаниям напряжения.
Как мне узнать, подходит ли двигатель с контактным кольцом для моего проекта?
Самое важное, на что следует обратить внимание, — это размер вашего груза. Если у вас есть высокоинерционная нагрузка, лучше всего использовать электродвигатель с контактным кольцом.
Двигатели с контактными кольцамитакже являются идеальным выбором, если вам необходимо контролировать скорость двигателя.
ЛУЧШИЙ: ДВИГАТЕЛЬ С КОЛЬЦОНЫМ КОЛЬЦОМ ПРОТИВ БЕЛКОВОЙ КЛЕТКИ
Каждый двигатель имеет собственное применение. Мы все еще можем сравнить некоторые из его функций, чтобы помочь вам лучше понять разницу между ними.
- Конструкция — конструкция электродвигателя с фазным ротором сложнее, чем с короткозамкнутым ротором.
 Это связано с обмотками на роторе и использованием контактных колец.
Это связано с обмотками на роторе и использованием контактных колец. - Ротор — Ротор двигателя с короткозамкнутым ротором представляет собой набор стержней, которые закорочены концевыми кольцами.Что касается электродвигателя с контактным кольцом, ротор имеет ту же обмотку, что и статор.
- Управление скоростью. Как мы уже упоминали, электродвигатели с фазным ротором идеально подходят для простого управления скоростью. Мы достигаем этого, добавляя внешнее сопротивление ротору, чего не может сделать беличья клетка.
- Крутящий момент — двигатели с короткозамкнутым ротором имеют низкий пусковой момент, который не подходит для высокоинерционных нагрузок. Этого не происходит с двигателями с контактным кольцом, которые имеют высокий пусковой момент.
- КПД — из-за высоких потерь в меди электродвигатели с фазным ротором менее эффективны, чем с короткозамкнутым ротором.Это верно для легких нагрузок, но не для высокоинерционных нагрузок.
- Применение — Двигатели с контактным кольцом не используются во многих отраслях промышленности из-за более низкого КПД по сравнению с короткозамкнутым ротором. В промышленности используются электродвигатели с контактным кольцом, когда им требуется регулирование высокого крутящего момента и / или скорости.
- Техническое обслуживание — По сравнению с двигателями с фазным ротором, двигатели с короткозамкнутым ротором имеют низкие затраты на техническое обслуживание. Это происходит из-за фазовой обмотки и контактных колец, используемых в электродвигателях с контактными кольцами.
 Это связано с обмотками на роторе и использованием контактных колец.
Это связано с обмотками на роторе и использованием контактных колец. В промышленности используются электродвигатели с контактным кольцом, когда им требуется регулирование высокого крутящего момента и / или скорости.
В промышленности используются электродвигатели с контактным кольцом, когда им требуется регулирование высокого крутящего момента и / или скорости.Самое главное — помнить о потребностях вашего проекта.
Примите во внимание все, что вы узнали сегодня, и решите, что лучше всего для вас и вашего проекта.
Заключение
Двигатели с контактными кольцами — прекрасный инструмент, даже если они не подходят для каждого проекта. Они приводят в действие гигантские машины и решают проблемы, которые альтернативы просто не могут решить.
Вот и все, что нужно знать о контактных кольцах. Во всяком случае, все, что вам нужно, чтобы принять правильное решение.
Завершить:
- Электродвигатель с контактным кольцом — это асинхронный двигатель.
- Имеет трехфазную обмотку на фазном роторе.
- Он соединен с контактными кольцами, которые могут увеличить сопротивление.
- Создает больший крутящий момент при пуске и требует меньшего пускового тока.
- Используется для регулирования скорости и высокоинерционных нагрузок.
- Техническое обслуживание может быть дорогостоящим по сравнению с двигателями с короткозамкнутым ротором.

Что вы думаете о преимуществах использования электродвигателей с контактными кольцами? Мы что-нибудь пропустили?
Дайте нам знать в комментариях.
У вас все еще есть вопросы о преимуществах электродвигателей с контактными кольцами? Свяжитесь с нами, чтобы поговорить с одним из наших экспертов!
Двигатель с фазным ротором — Википедия
Электродвигатель с фазным ротором , также известный как электродвигатель с фазным ротором , представляет собой тип асинхронного двигателя, в котором обмотки ротора соединены через контактные кольца с внешним сопротивлением.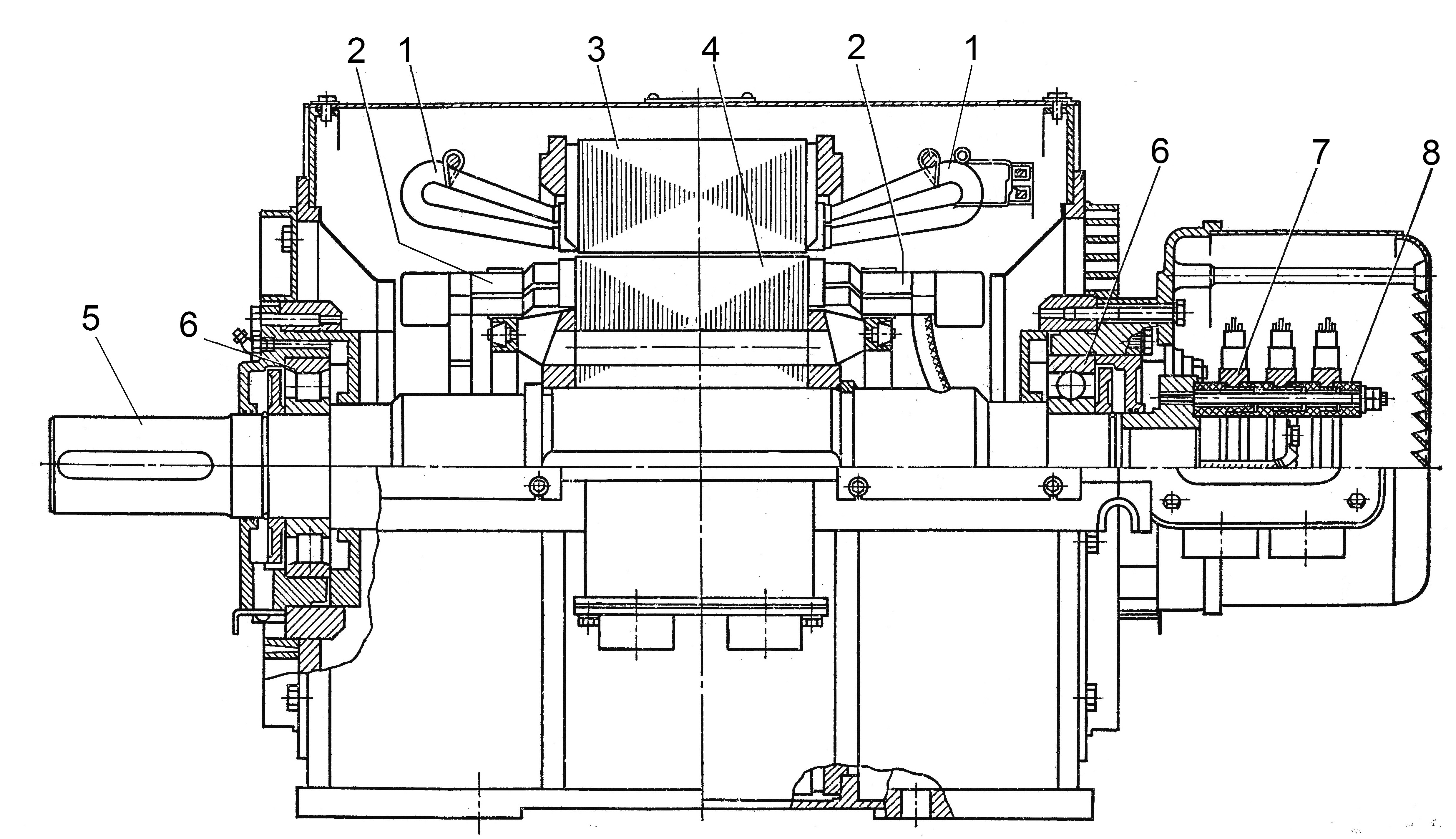 Регулировка сопротивления позволяет управлять характеристикой скорости / момента двигателя. Двигатели с фазным ротором можно запускать с низким пусковым током, добавляя высокое сопротивление в цепь ротора; по мере ускорения двигателя сопротивление может уменьшаться.[1]
Регулировка сопротивления позволяет управлять характеристикой скорости / момента двигателя. Двигатели с фазным ротором можно запускать с низким пусковым током, добавляя высокое сопротивление в цепь ротора; по мере ускорения двигателя сопротивление может уменьшаться.[1]
| Эта статья требует дополнительных ссылок для проверки . (июль 2021 г.) |
По сравнению с короткозамкнутым ротором ротор электродвигателя с контактным кольцом имеет большее количество витков обмотки; индуцированное напряжение при этом выше, а ток ниже, чем для ротора с короткозамкнутым ротором. Во время запуска обычный ротор имеет 3 полюса, подключенных к контактному кольцу. Каждый полюс соединен последовательно с резистором переменной мощности.Когда двигатель достигает полной скорости, полюса ротора замыкаются на короткое замыкание. Во время запуска резисторы уменьшают напряженность поля на статоре.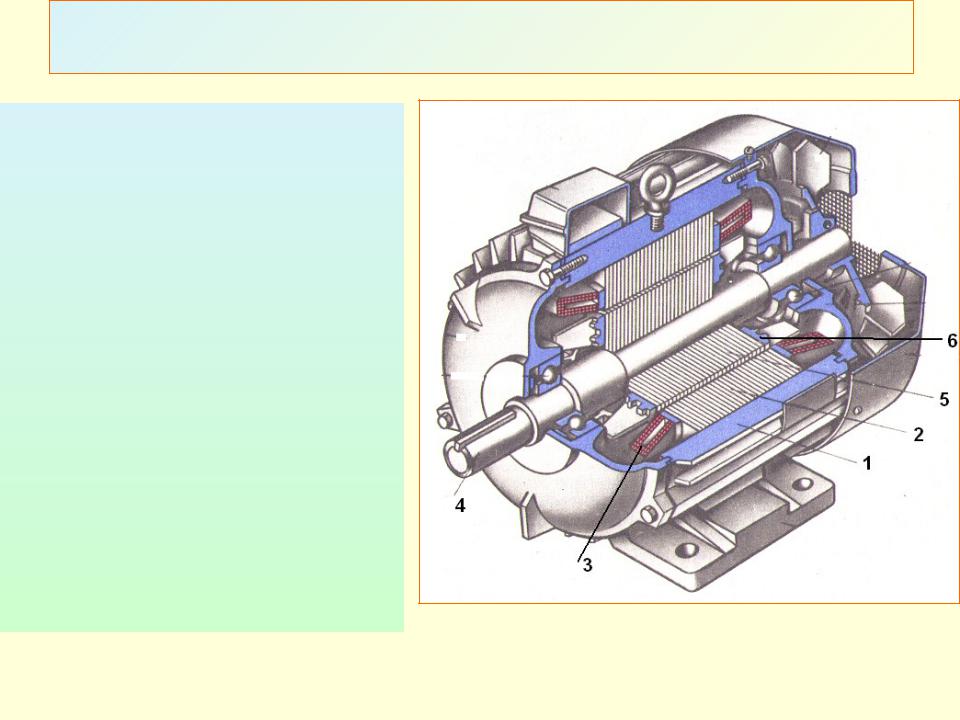 В результате снижается пусковой ток. Еще одно важное преимущество перед двигателями с короткозамкнутым ротором — более высокий пусковой момент.
В результате снижается пусковой ток. Еще одно важное преимущество перед двигателями с короткозамкнутым ротором — более высокий пусковой момент.
Характеристики скорости и крутящего момента двигателя с фазным ротором можно регулировать путем изменения внешнего сопротивления, в отличие от двигателя с короткозамкнутым ротором, который имеет фиксированную характеристику. Это полезно для управления скоростью двигателя.[1]
Двигатель с фазным ротором может использоваться в различных приводах с регулируемой скоростью. Общие приложения включают подъемники и конвейерные системы. Некоторые типы частотно-регулируемых приводов восстанавливают мощность частоты скольжения из контура ротора и возвращают ее в источник питания, обеспечивая широкий диапазон скоростей с высокой энергоэффективностью. Электрические машины с двойным питанием используют контактные кольца для подачи внешнего питания на цепь ротора, что позволяет регулировать скорость в широком диапазоне. Сегодня регулирование скорости с помощью электродвигателя с контактными кольцами в основном заменяется асинхронными электродвигателями с частотно-регулируемыми приводами.
Синхронные двигатели с фазным ротором и асинхронные двигатели Рассматривая стоимость жизненного цикла ваших ценных моторных активов, зачем рисковать в дешевом магазине, который не обращает внимания на детали? Когда вы выбираете нас для работы над вашим мотором, вы получаете партнера, который понимает ваше чувство срочности, а также то, что вам нужна информация, чтобы принять наилучшее возможное решение. Мы являемся экспертами в ремонте всех двигателей переменного тока, синхронных двигателей и двигателей с фазным ротором, начиная от специализированных агрегатов малой мощности до 7000 лошадиных сил высоковольтных машин. Наши стандарты соответствуют требованиям ANSI / EASA AR100 или превосходят их и являются одними из самых строгих в отрасли.Таким образом, независимо от того, есть ли у вас собственные спецификации или мы следуем нашим, вы можете рассчитывать на то, что работа будет сделана правильно. В начало Когда вы смотрите на продавца вашего двигателя, вы должны учитывать множество факторов. Мы начинаем с нашего парка из более чем 30 автомобилей (самый большой из которых имеет полную массу 52 000 фунтов), что гарантирует, что мы сможем транспортировать ваши моторы безопасным и эффективным способом без ожидания. Все наши объекты оснащены многочисленными мостовыми кранами (до 35 тонн), поэтому мы можем безопасно перемещать ваш двигатель и все компоненты в процессе ремонта.Когда он прибудет на наш объект, мы пометим его уникальным номером работы, начнем фотографическую документацию (которая продолжается в течение всего процесса ремонта) и проведем начальные испытания обмоток. Устройство будет разобрано, тщательно очищено и высушено. После высыхания двигатель подвергнется серии проверок, чтобы определить первопричину неисправности. Наши специалисты проводят все необходимые измерения с помощью откалиброванных инструментов, чтобы оценить состояние цапф подшипников, концевых колец, ротора и всех механических компонентов.Затем мы проводим серию электрических испытаний как статора, так и ротора. Осмотр завершится подробным предложением и объемом работ. В начало После получения разрешения на продолжение, наша команда отремонтирует ваш двигатель в соответствии с указаниями без каких-либо ярлыков. Наши полностью оборудованные собственные механические цеха восстановят критические размеры даже с самыми строгими допусками. У нас работают квалифицированные, опытные машинисты, многие из которых также владеют всеми видами сварки, поэтому вы можете быть уверены, что ваш ремонт будет проведен правильно.Ремонт контактных колец и цилиндров требует такого уровня внимания к деталям, который многие мастерские не будут пытаться предпринять, но мы являемся экспертами в этих критических частях каждого ротора и синхронного двигателя. В начало Если требуется перемотка двигателя, будь то случайная или произвольная намотка, мы определенно должны выбрать нашу команду. Наши намоточные машины в среднем за более чем 20-летний опыт намотки! Каждое из наших предприятий оснащено сушильными печами с регулируемой температурой, современными тестерами потерь в сердечнике, компьютерными системами намотки и хлебопекарными печами, чтобы ваша работа продолжалась без задержек.Чтобы обеспечить минимальную стоимость жизненного цикла, мы всегда используем высококачественный инверторный провод для обмоток. Система изоляции будет изготовлена в соответствии с вашими требованиями или будет соответствовать требованиям к системам изоляции класса H. В зависимости от ваших предпочтений лак можно наносить традиционным способом окунания и запекания или в одной из трех наших систем вакуумной пропитки (VPI). Что касается двигателей с контактным кольцом, мы являемся экспертами в области катушек возбуждения и обмоток амортизаторов, а также во всех аспектах производительности щеток, поэтому вы можете быть уверены, что не возникнет проблем с электрическими характеристиками вашего синхронного двигателя или двигателя с фазным ротором. В начало По мере того, как ремонт продвигается, вы должны ожидать, что наша команда будет регулярно проверять и обсуждать ход работы, а также ключевые вопросы, уникальные для вашего двигателя, такие как маркировка проводов, потенциальные проблемы с деталями трансмиссии и любые возможности чтобы продлить срок службы вашего актива или снизить ваши затраты. Мы проработаем детали и будем общаться с вами на каждом этапе пути. После того, как будет произведен весь необходимый ремонт, можно начинать окончательную сборку и испытания.Каждый вращающийся компонент точно сбалансирован. У нас есть собственные возможности балансировки до 25 000 фунтов. Наши опытные техники соберут ваш двигатель с использованием новых высококачественных подшипников. Полностью собранный двигатель будет подвергнут заключительному испытанию, которое может включать испытание под нагрузкой до 1000 лошадиных сил. Во время пробного запуска мы собираем данные о температуре подшипников и вибрации. Результаты вибрации будут оценены одним из наших специалистов по вибрации уровня II. Перед отправкой двигатель окрашивается, и наш супервайзер проводит окончательный аудит качества, чтобы убедиться, что ваш двигатель готов к работе.Все данные, собранные в процессе ремонта, могут быть доступны вам в форме настраиваемых отчетов, которые предоставят вашей организации полное представление о состоянии двигателя и усилиях, предпринятых для его восстановления. В начало У нас также есть полный комплекс услуг по обслуживанию на месте, поэтому мы можем выполнить любой проект, который может у вас возникнуть, от помощи при плановом техническом обслуживании до аварийного реагирования командой квалифицированных технических специалистов.Услуги включают экспертное устранение неисправностей, профилактическое обслуживание, анализ вибрации, инфракрасный анализ, анализ цепи двигателя, услуги по центровке, снижение тока на валу и помощь при снятии или установке вашего двигателя. В начало На каждом этапе процесса обслуживания, от первого телефонного звонка до предоставления нашего подробного отчета, вы найдете наших опытных сотрудников, готовых удовлетворить ваши потребности, выполнить требования и превзойти ваши ожидания.Мы стремимся продлить срок службы ваших двигателей. Наша команда готова решить ваши самые сложные проблемы, позвоните нам и почувствуйте разницу. Перейти к электромеханическим службам Пример 1: Решение KH продлевает критически важный срок службы двигателя |
 Мы исследуем двигатель, применение и то, как они вписываются в ваш процесс, чтобы мы знали как детали, так и то, как они влияют на общую картину. Предоставляя вам варианты и информацию, мы вместе снизим затраты и увеличим среднее время наработки на отказ.
Мы исследуем двигатель, применение и то, как они вписываются в ваш процесс, чтобы мы знали как детали, так и то, как они влияют на общую картину. Предоставляя вам варианты и информацию, мы вместе снизим затраты и увеличим среднее время наработки на отказ.Асинхронные двигатели с контактным кольцом — Baldor.com
Для приложений, требующих высокого пускового момента, низкого пускового тока или того и другого, Baldor с гордостью предлагает широкую линейку асинхронных двигателей ABB с контактными кольцами. Наш опыт проектирования и применения сделали нас ведущим производителем высоковольтных асинхронных двигателей с контактным кольцом.Эти двигатели широко используются в приложениях, требующих высокого пускового момента или низкого пускового тока, включая приводы мельниц, цементные заводы, шахты, коммунальные службы, водные сооружения и многое другое.
Характеристики
- Отдельное сравнение контактных колец на неприводной стороне для предотвращения попадания пыли в обмотки двигателя
- Сборная модульная рама со сварной стальной конструкцией, доступна как в горизонтальном, так и в вертикальном исполнении
- Размеры корпуса варьируются от 400 мм до 1120 мм, высота вала и все основные типы охлаждения
- Чтобы продлить срок службы, мы используем изоляционный материал класса F на роторе и статоре, при этом на статор также распространяется полный процесс VPI.
- Возбуждение доступно с постоянными контактными щетками или с подъемным устройством для щеток
- Доступное напряжение до 15 кВ
Общие приложения
- Дробилка
- Миллс
- Конвейеры
- Вентиляторы и насосы
- Компрессоры и смесители
Двигатель с обмоткой ротора, высоковольтный электродвигатель с контактным кольцом
Крупногабаритный высоковольтный двигатель с контактным кольцом и водяным охлаждением YRKS — это двигатель, разработанный и произведенный нашей компанией на основе многолетних исследований и разработок и производства высоковольтных трехфазных асинхронных двигателей.Этот тип двигателя имеет коробчатую конструкцию. Рама изготовлена из сварной коробчатой конструкции из листовой стали, легкой по весу и хорошей жесткости. Статор двигателя с большим высоковольтным токосъемным кольцом
YRKS имеет выдвижную внешнюю запрессованную конструкцию, для сопротивления обмотки статора используется изоляционный материал F-класса, а конец имеет надежную фиксацию и связывание. После многократных испытаний межвиткового импульсного напряжения в процессе производства и испытания давления на грунт проводят пропитку без растворителя под вакуумом (VPI).Таким образом, изоляционные характеристики двигателя превосходны и надежны, механическая прочность хорошая, а влагостойкость высокая. Ротор с обмоткой обработан изоляцией класса F и пропиткой под вакуумом без растворителей (VPI). Сварочная головка ротора и проводка изолированы. Контактное кольцо и обмотка статора двигателя расположены в двух изолированных пространствах, чтобы предотвратить попадание тонера в обмотку. Подшипник имеет два типа подшипника качения и подшипник скольжения.По мощности и скорости двигателя основная форма защиты — IP54. Если двигатель имеет высокую степень защиты, уровень защиты подшипника также повысится.
Основная выходная коробка двигателя с токосъемными кольцами высокого напряжения имеет степень защиты IP54, обычно устанавливается с правой стороны двигателя (лицом к удлиненному концу вала двигателя) или может быть установлена с левой стороны двигателя в соответствии с заказом . Основная розетка имеет отдельную внешнюю клемму заземления. В верхней части мотора расположена отдельная система водяного охлаждения.
Диапазон высоты центра: h500 ~ 1000 мм
Диапазон мощности: 200 кВт ~ 12000 кВт
Количество полюсов: 4/6/8/10/12
Номинальное напряжение: 6000 В / 6600 В / 10000 В / 11000 В
Номинальная частота : 50 Гц / 60 Гц
Уровень защиты: IP54 или IP55
Класс изоляции: F
Рабочая система: S1 (непрерывный)
Метод охлаждения: IC81W
Форма установки: IMB3
Подключение двигателя: Y (три выходных клеммы в распределительная коробка, распределительная коробка от удлинителя шпинделя расположена с правой стороны основания)
Высота: не более 1000 м
Этот тип двигателя подходит для использования в средах, где температура окружающего воздуха не превышают 40 ° C, нет серьезной пыли, минимальная температура окружающего воздуха составляет -15 ° C, и в воздухе нет агрессивных и взрывоопасных газов (которые также можно превратить в влажную жару или высотный двигатель).
Большой высоковольтный электродвигатель с фазным ротором с фазным ротором YRKS может увеличивать пусковой момент при небольшом пусковом токе. Двигатель подходит для применений, где мощность питающей линии недостаточна для запуска короткозамкнутого ротора, время пуска длительное, пуск частый и требуется регулирование скорости в небольшом диапазоне. Эта серия двигателей обладает такими преимуществами, как высокая эффективность, энергосбережение, низкий уровень шума, низкая вибрация, легкий вес, надежная работа, удобство установки и обслуживания.
Основной технологический процесс двигателя
Статор двигателя: обработка корпуса → штамповочный пресс → посадка с железным сердечником → изготовление рулонов → ткачество → сушка краски погружением
Электронный ротор: обработка пустого вала → установка пресса с железным сердечником → утюг литой алюминий → вал колонны ротора → плетение → сушка краски погружением → динамическая балансировка
Сборка двигателя: сборка ротора статора → испытание машины → окраска внешнего вида двигателя → хранение упаковки
Завод по производству двигателей нашей компании придерживается концепции экологически чистые, эффективные и энергосберегающие производственные услуги, уделяют внимание гармоничному развитию внутренней и внешней среды, строят экологически чистые предприятия по производству двигателей, строго соблюдают стандартные процессы в двигателях и выбирают высококачественные энергосберегающие материалы для обеспечения качества двигателя продукты.