


15.Характеристики двигателя параллельного возбуждения.
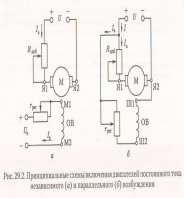
1) Какие различают схемы возбуждения двигателей постоянного тока? Возбуждение может быть параллельным последовательным смешанным и независимым. Тип возбуждения означает, в какой последовательности включены обмотки якоря и ротора.
При параллельном возбуждении обмотки якоря и ротора включаются параллельно друг другу к одному источнику тока. Так как у обмотки возбуждения больше витков чем у якорной то и ток в ней течет незначительный. В цепи, как обмотки ротора, так и обмотки якоря могут включаться регулировочные сопротивления.
Обмотка возбуждения может подключаться и к отдельному источнику тока. В этом случае возбуждение будет называться независимым. У такого двигателя характеристики будут схожи с двигателем, в котором применяется постоянный магнит. Скорость вращения двигателя с независимым возбуждением, как и у двигателя с параллельным возбуждением зависит от тока якоря и основного магнитного потока. Основной магнитный поток создается обмоткой ротора.
Если обмотка возбуждения включена последовательно с якорной, то такое возбуждение называется последовательным. При этом через якорь и обмотку возбуждения протекает один и тот же ток. Таким образом, магнитный поток изменяется с изменением нагрузки двигателя. А следовательно скорость двигателя будет зависеть от нагрузки.

При смешанном возбуждении используются двигатели, у которых на каждом полюсе есть по две обмотки. Их можно включить так чтобы магнитные потоки как складывались, так и вычитались.
Рисунок 4 — схема смешанного возбуждения машины постоянного тока
Стартовый ток в машине постоянного тока достаточно велик, поэтому ее следует запускать с добавочным реостатом, чтобы избежать повреждения обмоток.
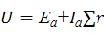
2) Записать уравнения равновесия ЭДС двигателя при, объяснить их физический смысл. При работе генератора постоянного тока в его якорной обмотке индуктируется ЭДС Еа. При подключении к генератору нагрузки rн (рис.1) в цепи якоря появляется ток Ia и на зажимах устанавливается напряжение U.
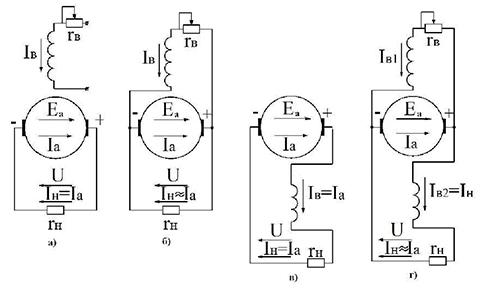
Рис.1
Уравнение равновесия ЭДС по второму закону Кирхгофа для цепи якоря генератора записывается в виде
где
Ia –
ток в обмотке якоря;  —
сумма сопротивлений участков цепи
якоря.
—
сумма сопротивлений участков цепи
якоря.
В общем случае

где ra, rд, rс, rк — сопротивления обмоток якоря, добавочных полюсов, последовательной обмотки возбуждения и компенсационной обмотки.
Поскольку Ea=cenФ, то уравнение электрического равновесия генератора записывается в виде
Умножив обе части выражения на ток Ia, получим уравнение мощности генератора
где
UIa=
P2 –
полезная мощность, отдаваемая генератором
подключенным потребителям; EaIa=Pэм–
электромагнитная мощность генератора;  —
потери в цепи якоря.
—
потери в цепи якоря.
Из
первого выражения следует, что ЭДС
генератора Eа имеет
две составляющие: одна U выводится на
зажимы генератора и действует на
подключенную нагрузку, а другая 
где
 —
вращающий
момент первичного двигателя;
—
вращающий
момент первичного двигателя;

 —
момент
холостого хода, соответствующий потерям
на трение, потерям в стали и добавочным
потерям.
—
момент
холостого хода, соответствующий потерям
на трение, потерям в стали и добавочным
потерям.
В неустановившихся режимах, когда частота вращения изменяется, возникает также динамический (вращающий) момент

где ℐ — момент инерции вращающихся частей генератора.
Динамический
момент соответствует кинетической
энергии вращающихся масс. При изменении
частоты вращения генераторного агрегата
от установившихся значений в сторону
увеличения динамический момент оказывает
тормозящее действие, т.е. действует
согласно с 
 оказывает ускоряющее действие, т.е.
совпадает с первичного двигателя.
Следовательно, в общем случае при n≠const
уравнение моментов будет иметь вид
оказывает ускоряющее действие, т.е.
совпадает с первичного двигателя.
Следовательно, в общем случае при n≠const
уравнение моментов будет иметь вид 
Уравнение электрического равновесия генератора дает возможность установить зависимость между любыми электрическими величинами в генераторе, т.е. определить характеристики машины. Основными величинами, определяющими режимы работы генераторов, являются: U, Iа, Iв, n. Генераторы чаще всего работают с постоянной частотой вращения, поэтому основные характеристики снимаются при n=const. 3) Записать уравнения равновесия моментов двигателя и объяснить их физический смысл.
4) Объяснить работу двигателя постоянного тока на примере энергетической диаграммы.
2.9. Энергетические диаграммы активной и реактивной мощностей асинхронной машины
Энергетическая диаграмма активной мощности асинхронного двигателя (рис.2.10) может быть представлена в следующем виде.

Рис. 2.10
Двигатель
потребляет из сети активную мощность  .
.
Часть
этой мощности теряется в виде электрических
потерь в активном сопротивлении обмотки
статора  ,
другая часть теряется в виде магнитных
потерь в сердечнике статора
,
другая часть теряется в виде магнитных
потерь в сердечнике статора 
Оставшаяся
часть активной мощности представляет
собой электромагнитную мощность  ,
передаваемую магнитным полем со статора
на ротор
,
передаваемую магнитным полем со статора
на ротор
 .
.
Часть электромагнитной мощности теряется в виде электрических потерь в активном сопротивлении обмотки ротора
 .
.
Остальная часть электромагнитной мощности превращается в механическую мощность, развиваемую на роторе

Часть
механической мощности  теряется
внутри самой машины в виде механических
потерь
теряется
внутри самой машины в виде механических
потерь  (на
вентиляцию, на трение в подшипниках и
на щетках машин с фазным ротором, если
эти щетки при работе не поднимаются) и
добавочных потерь
(на
вентиляцию, на трение в подшипниках и
на щетках машин с фазным ротором, если
эти щетки при работе не поднимаются) и
добавочных потерь  (от
высших гармоник МДС обмоток и от
зубчатости статора и ротора).
(от
высших гармоник МДС обмоток и от
зубчатости статора и ротора).
Полезная
механическая мощность на валу
Сумма потерь в двигателе
 ,
,  .
.
КПД
двигателя  .
.
Необходимо
назвать еще следующие важные
соотношения: ,
,  ,
из которых следует, что для
уменьшения
,
из которых следует, что для
уменьшения  и повышения
КПД требуется, чтобы скольжение s
двигателя было малым.
и повышения
КПД требуется, чтобы скольжение s
двигателя было малым.
5) Какие различают характеристики двигателей постоянного тока последовательного, параллельного и смешанного возбуждения? объяснить их характер.
16.Характеристики двигателя последовательного возбуждения.
В двигателе последовательного возбуждения, который иногда называют сериесным, обмотка возбуждения включена последовательно с обмоткой якоря (рис. 1). Для такого двигателя справедливо равенство Iв=Ia=I, следовательно, его магнитный поток Ф зависит от нагрузки Ф=f (Ia). В этом главная особенность двигателя последовательного возбуждения и она определяет его свойства.
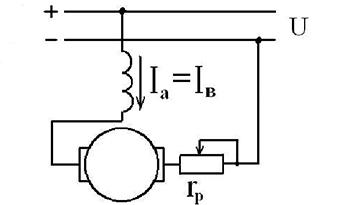
Рис. 1 — Схема электродвигателя последовательного возбуждения.
Скоростная характеристика представляет зависимость n=f (Ia) при U=Uн. Она не может быть точно выражена аналитически во всем диапазоне изменения нагрузки от холостого хода до номинальной из-за отсутствия прямой пропорциональной зависимости между Ia и Ф. Приняв допущение Ф=кIa, запишем аналитическую зависимость скоростной характеристики в виде
 .
.
При увеличении тока нагрузки гиперболический характер скоростной характеристики нарушается и приближается к линейному, так как при насыщении магнитной цепи машины с увеличением тока Ia магнитный поток остается практически постоянным (рис. 2). Крутизна характеристики зависит от величины Σr.
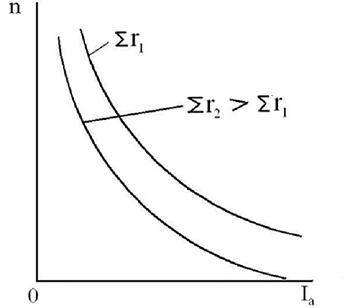
Рис. 2 — Скоростные характеристики двигателя последовательного возбуждения.
Моментная характеристика — это зависимость M=f (Ia) при U=Uн. Если предположить, что магнитная цепь не насыщена, то Ф=кIa и, следовательно, имеем
М=смIaФ=смкIa2
Это уравнение квадратичной параболы.
Кривая моментной характеристики изображена на рисунке 3.8. По мере увеличения тока Ia магнитная система двигателя насыщается, и характеристика постепенно приближается к прямой.
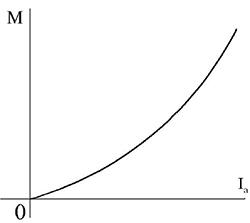 Рис.
3 — Моментная характеристика двигателя
последовательного возбуждения.
Рис.
3 — Моментная характеристика двигателя
последовательного возбуждения.
Механическая характеристика представляет собой зависимость n=f (M) при U=Uн. Аналитическое выражение этой характеристики может быть получено только в частном случае, когда магнитная цепь машины ненасыщенна и поток Ф пропорционален току якоря Ia. Тогда можно записать
 .
.
Решая совместно уравнением, получаем
 .
.
т.е. механическая характеристика двигателя последовательного возбуждения, также как и скоростная, имеет гиперболический характер (рис. 4).
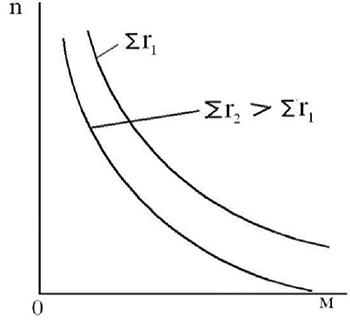 Рис.
4 — Механические характеристики двигателя
последовательного возбуждения.
Рис.
4 — Механические характеристики двигателя
последовательного возбуждения.
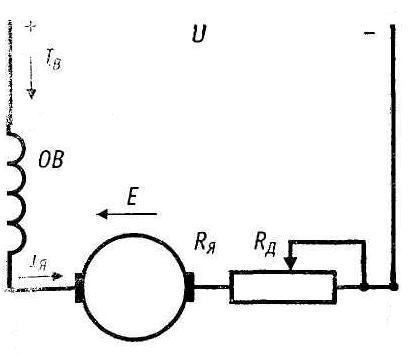
Электродвигателем параллельного возбуждения называется двигатель постоянного тока, обмотка возбуждения которого включена параллельно обмотке якоря (рис. 1). При снятии характеристик к цепи якоря подводится номинальное напряжение Uн=const.

Рис. 1 — Схема двигателя параллельного возбуждения.
Ток, потребляемый двигателем из сети, определяется суммой I=Ia+Iв, ток возбуждения обычно равен Iв=(0,03…0,04) Iн. Все характеристики двигателя снимаются при постоянных сопротивлениях в цепях возбуждения rв=const и якоря
Σr = const.
Скоростная характеристика.
Зависимость n=f (Ia) при Uн=const и Iв=const
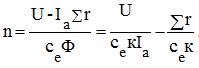
Из уравнения ЭДС для электродвигателя
Имеем
 .
.
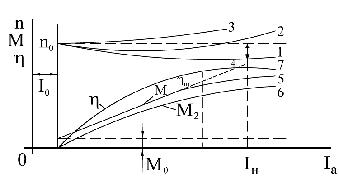 Рис.
2 — Характеристики двигателя параллельного
возбуждения.
Рис.
2 — Характеристики двигателя параллельного
возбуждения.
Моментная характеристика – это зависимость М=f (Ia) при rв=const, U=Uн и Σr=const. В установившемся режиме работы двигателя согласно
 .
.
имеем Mэм = M2+M0 = смIaФ. Если бы в процессе работы машины поток Ф не изменялся, то моментная характеристика представляла бы собой прямую (характеристика 4, рисунок 2). В действительности поток Ф с ростом тока Ia несколько уменьшается из-за размагничивающего действия реакции якоря, поэтому моментная характеристика слегка наклонена вниз (кривая 5). Характеристика полезного момента располагается ниже кривой электромагнитного момента на величину момента холостого хода (кривая 6).
Характеристика КПД η=f (Ia) снимается при U=Uн, rв=const, Σr=const и имеет типичный для электродвигателей вид (характеристика 7 на рис. 2). КПД быстро растет при увеличении нагрузки от холостого хода до 0,25Рн , достигает максимального значения при Р=(0,5…0,75) Рн, а затем до Р=Рн остается почти неизменным. Обычно в двигателях малой мощности η=0,75…0,85, а в двигателях средней и большой мощности η=0,85…0,94.
Механическая характеристика представляет зависимость n=f (M) при U=Uн, Iв=const и Σr=const. Аналитическое выражение для механической характеристики можно получить из уравнения ЭДС электродвигателя
 .
.
Определив ток Iа из выражения М = сеIaФ и подставив это значение тока в выражение выше, получим
 .
.
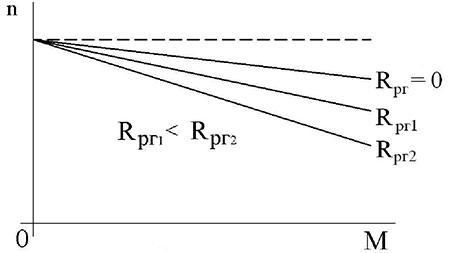
Рис. 3 — Механические характеристики двигателя параллельного возбуждения.
Следует помнить, что при обрыве цепи возбуждения Iв=0 обороты двигателя n→∞, т.е. двигатель идет «вразнос», поэтому его необходимо немедленно отключить от сети.
17.Характеристики двигателя смешанного возбуждения.
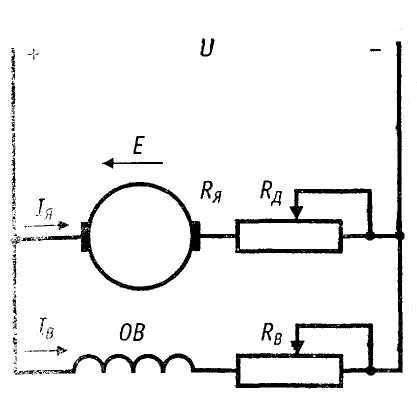
Принципиальная схема электродвигателя смешанного возбуждения приведена на рис. 1. В этом двигателе имеются две обмотки возбуждения – параллельная (шунтовая, ШО), подключенная параллельно цепи якоря, и последовательная (сериесная,СО), подключенная последовательно цепи якоря. Эти обмотки по магнитному потоку могут быть включены согласно или встречно.
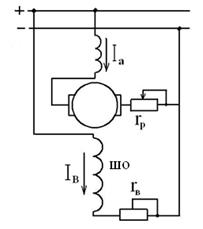 Рис.
1 — Схема электродвигателя смешанного
возбуждения.
Рис.
1 — Схема электродвигателя смешанного
возбуждения.
При согласном включении обмоток возбуждения их МДС складываются и результирующий поток Ф примерно равен сумме потоков, создаваемых обеими обмотками. При встречном включении результирующий поток равен разности потоков параллельной и последовательной обмоток. В соответствии с этим, свойства и характеристики электродвигателя смешанного возбуждения зависят от способа включения обмоток и от соотношения их МДС.
Скоростная характеристика n=f (Ia) при U=Uн и Iв=const (здесь Iв — ток в параллельной обмотке).
С увеличением нагрузки результирующий магнитный поток при согласном включении обмоток возрастает, но в меньшей степени, чем у двигателя последовательного возбуждения, поэтому скоростная характеристика в этом случае оказывается более мягкой, чем у двигателя параллельного возбуждения, но более жесткой, чем у двигателя последовательного возбуждения.
Соотношение между МДС обмоток может меняться в широких пределах. Двигатели со слабой последовательной обмоткой имеют слабо падающую скоростную характеристику (кривая 1, рис. 2).
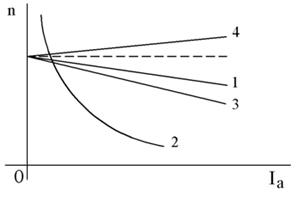 Рис.
2 — Скоростные характеристики двигателя
смешанного возбуждения.
Рис.
2 — Скоростные характеристики двигателя
смешанного возбуждения.
Чем больше доля последовательной обмотки в создании МДС, тем ближе скоростная характеристика приближается к характеристике двигателя последовательного возбуждения. На рис.2 линия 3 изображает одну из промежуточных характеристик двигателя смешанного возбуждения и для сравнения дана характеристика двигателя последовательного возбуждения (кривая 2).
При встречном включении последовательной обмотки с увеличением нагрузки результирующий магнитный поток уменьшается, что приводит к увеличению скорости двигателя (кривая 4). При такой скоростной характеристике работа двигателя может оказаться неустойчивой, т.к. поток последовательной обмотки может значительно уменьшить результирующий магнитный поток. Поэтому двигатели со встречным включением обмоток не применяются.
Механическая характеристика n=f (М) при U=Uн и Iв=const. двигателя смешанного возбуждения показана на рис.3 (линия 2).
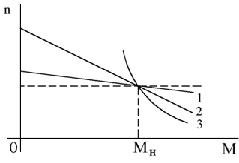
Рис. 3 — Механические характеристики двигателя смешанного возбуждения.
Она располагается между механическими характеристиками двигателей параллельного (кривая 1) и последовательного (кривая 3) возбуждения. Подбирая соответствующим образом МДС обеих обмоток, можно получить электродвигатель с характеристикой, близкой к характеристике двигателя параллельного или последовательного возбуждения.______
6.2.5. Двигатель постоянного тока с параллельным возбуждением
Пуск двигателя.
Внутреннее сопротивление якоря машины
невелико. У двигателей средней и
большой мощности оно имеет величину
порядка десятых-сотых долей Ома. При
прямом включении двигателя в сеть
пусковой ток IЯ.П = (14) достигает
(10-30)IН.
(14) достигает
(10-30)IН.
Поэтому прямой пуск двигателя недопустим. Такой большой пусковой ток опасен для двигателя и сети, напряжение в сети может значительно снизиться, кроме того, возникнет толчок момента, действующего на передачу и рабочий механизм.
Для ограничения силы
пускового тока последовательно с
обмоткой якоря включают пусковой
реостат rП (рис.27). Тогда токIЯ.П = (15)
(15)
Сопротивление пускового реостата выбирают таким образом, чтобы сила пускового тока не превышала кратковременно допустимого номинального значения силы тока якоря (2-2,5) IЯ. По мере увеличения частоты вращения двигателя растет противодействующая ЭДС якоря, которая направлена против подведенного напряжения, и ток снижается, поэтому сопротивление пускового реостата постепенно уменьшают до нуля. Пусковой реостат включается на 2-3 секунды и не рассчитан на длительное протекание тока. Двигатели мощностью до 1 кВт имеют сравнительно большое сопротивление якоря, поэтому их включают без пусковых реостатов.
При номинальной частоте
вращения двигателя имеемIЯ= (16)
(16)
Для определения частоты
вращения двигателя подставим в
формулу (16) значение ЭДС из формулы (6),
получимIЯ= ,откуда n =
,откуда n = (17)
(17)
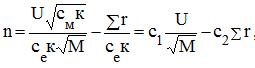
Уравнение (17) п = f(IЯ) носит название скоростной характеристики и указывает на то, что частота вращения двигателя прямо пропорциональна подведенному напряжению и обратно пропорциональна магнитному потоку.
При пуске двигателя регулировочный реостат в цепи возбуждения полностью выводится, чтобы обеспечить максимальное значение силы тока в цепи возбуждения и магнитного потока статора. Из формулы (17) видно, что при большом пусковом токе в якоре уменьшается числитель, а при большом токе в цепи возбуждения увеличивается знаменатель, что обеспечивает плавный пуск двигателя при достаточном вращающем моменте якоря для преодоления механического сопротивления.
На практике пользуются
зависимостью п=f(М), называемой механической
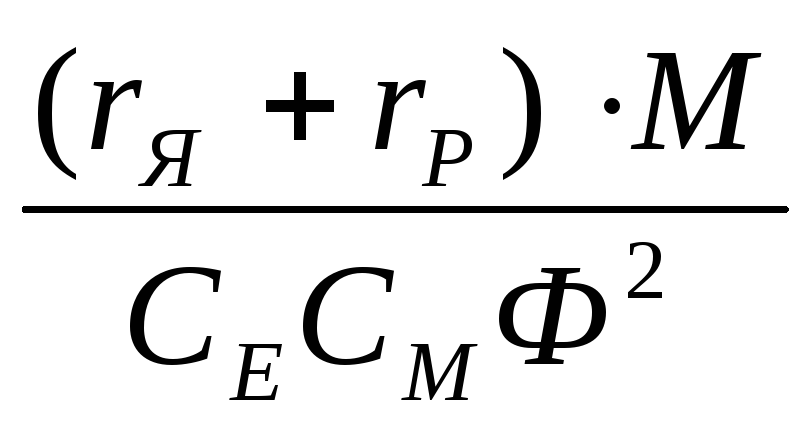
характеристикой. Подставим
в уравнение (17) значение момента
двигателя (10) М =
СмФ IЯ,
в результате чего получимп=  —
— (18)
(18)
Полученное уравнение является уравнением механической характеристики, связывающим зависимость установившейся частоты вращения двигателя от момента при постоянном напряжении сети и сопротивлении цепи якоря.
 Рис.
27. Схема двигателя
постоянного
тока с параллельным
возбуждением
Рис.
27. Схема двигателя
постоянного
тока с параллельным
возбуждением
В двигателях параллельного
и независимого возбуждения поток Ф практически постоянный, поэтому
механическая характеристика представляется
уравнением прямой (рис. 28), слегка
наклоненной к оси абсцисс. В выражении
(18) первое слагаемое уравнения  носит название частоты идеального
холостого хода и обозначается n0 , второе слагаемое
носит название частоты идеального
холостого хода и обозначается n0 , второе слагаемое  — потери частоты вращения двигателя
под нагрузкой ∆n. Тогда уравнение
механической характеристики двигателя
можно записать так: п = п0 — ∆n. Изменение частоты
вращения двигателя при номинальной
нагрузке составляет (3-8) % п0. Такая механическая
характеристика считается жесткой.
— потери частоты вращения двигателя
под нагрузкой ∆n. Тогда уравнение
механической характеристики двигателя
можно записать так: п = п0 — ∆n. Изменение частоты
вращения двигателя при номинальной
нагрузке составляет (3-8) % п0. Такая механическая
характеристика считается жесткой.
Регулирование частоты вращения двигателя с параллельным возбуждением. Рассмотрим способы регулирования частоты вращения двигателя при неизменном тормозном моменте на валу.
Из уравнения механической характеристики (18) видно, что изменение п возможно при регулировании напряжения питания U, потока возбуждения Ф и величины сопротивления цепи якоря rЯ , CЕ и СМ — конструктивные коэффициенты, изменить которые мы не можем.
Регулирование частоты вращения изменением приложенного напряжения не применяется, так как с изменением силы тока изменяется и магнитный поток машины, а при малых напряжениях можно размагнитить машину.
А) Регулирование «на уменьшение потока» (полюсное регулирование)
Из формулы п0 =  следует, чточастота вращения идеального
холостого хода обратно пропорциональна
потоку. Пока магнитная система машины
не насыщена, поток можно считать
пропорциональным силе тока возбуждения IВ.
Следовательно, частоту вращения
двигателя можно регулировать изменением
силы тока возбуждения, для чего в цепь
возбуждения вводится реостат (рис.
27). С увеличением сопротивления rВ уменьшается сила
тока возбуждения IВ,
вследствие чего уменьшается поток Ф.
Уменьшение потока возбуждения ведет
к увеличению частоты вращения идеального
холостого хода п0. Потери частоты
вращения ∆n будут обратно пропорциональны квадрату
магнитного потока.
следует, чточастота вращения идеального
холостого хода обратно пропорциональна
потоку. Пока магнитная система машины
не насыщена, поток можно считать
пропорциональным силе тока возбуждения IВ.
Следовательно, частоту вращения
двигателя можно регулировать изменением
силы тока возбуждения, для чего в цепь
возбуждения вводится реостат (рис.
27). С увеличением сопротивления rВ уменьшается сила
тока возбуждения IВ,
вследствие чего уменьшается поток Ф.
Уменьшение потока возбуждения ведет
к увеличению частоты вращения идеального
холостого хода п0. Потери частоты
вращения ∆n будут обратно пропорциональны квадрату
магнитного потока.
Таким образом, изменением потока возбуждения можно регулировать частоту вращения двигателя. На рис. 29 приведены искусственные механические характеристики. При значительном уменьшении силы тока возбуждения (особенно при обрыве цепи возбуждения) силы тока якоря и частота вращения ненагруженного двигателя сильно возрастают, что может привести к опасным механическим повреждениям. Это явление недопустимо, поэтому двигатель должен быть снабжен автоматической защитой, отключающей его от сети при предельном уменьшении потока (ниже ‘/3ФН).
Регулирование «на уменьшение потока», называемое еще полюсным регулированием, весьма распространено, так как оно экономично и удобно в связи с тем, что сила тока возбуждения мала и мощность потерь в реостате мала.
Б) Реостатное регулирование.
При этом способе регулирования, при Ф=const,
последовательно с якорем включается
регулировочный реостат. Уравнение
механической характеристики имеет
вид: п=  —
— (19)
(19)
Анализ уравнения (19) показывает, что при изменении rР изменяется только ∆n, т. е. увеличивается наклон механической характеристики (рис.30). Изменяя rР, увеличивая его, можно получить семейство механических характеристик, более мягких, чем естественная механическая характеристика с частотой вращения п1, п2 и п3. У всех этих характеристик общая точка п0 — частота вращения идеального холостого хода двигателя. Такое регулирование неэкономично, так как через регулировочный реостат проходит весь ток якоря IЯ, а это обусловливает значительные потери мощности ∆Р = rР I2.

Рис. 28. Механическая характеристика двигателя с параллельным возбуждением
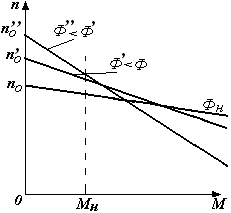
Рис. 29.Искусственные механические характеристики двигателя
Реверсирование двигателей постоянного тока. Под реверсированием понимают изменение направления вращения якоря двигателя.
Если изменить направление магнитного потока или тока якоря, то знак, а значит, и направление вращения двигателя изменятся. Однако одновременное изменение направления потока и тока якоря к изменению знака вращающего момента не приводит. Практически реверсирование осуществляется переключением выводов обмотки якоря или обмотки возбуждения.
 Рис. 30. Механические
характеристики реостатного регулирования
Рис. 30. Механические
характеристики реостатного регулирования
6.2.5. Двигатель постоянного тока с параллельным возбуждением
Пуск двигателя.
Внутреннее сопротивление якоря машины
невелико. У двигателей средней и
большой мощности оно имеет величину
порядка десятых-сотых долей Ома. При
прямом включении двигателя в сеть
пусковой ток IЯ.П = (14) достигает
(10-30)IН.
(14) достигает
(10-30)IН.
Поэтому прямой пуск двигателя недопустим. Такой большой пусковой ток опасен для двигателя и сети, напряжение в сети может значительно снизиться, кроме того, возникнет толчок момента, действующего на передачу и рабочий механизм.
Для ограничения силы
пускового тока последовательно с
обмоткой якоря включают пусковой
реостат rП (рис.27). Тогда токIЯ.П = (15)
(15)
Сопротивление пускового реостата выбирают таким образом, чтобы сила пускового тока не превышала кратковременно допустимого номинального значения силы тока якоря (2-2,5) IЯ. По мере увеличения частоты вращения двигателя растет противодействующая ЭДС якоря, которая направлена против подведенного напряжения, и ток снижается, поэтому сопротивление пускового реостата постепенно уменьшают до нуля. Пусковой реостат включается на 2-3 секунды и не рассчитан на длительное протекание тока. Двигатели мощностью до 1 кВт имеют сравнительно большое сопротивление якоря, поэтому их включают без пусковых реостатов.
При номинальной частоте
вращения двигателя имеемIЯ= (16)
(16)
Для определения частоты
вращения двигателя подставим в
формулу (16) значение ЭДС из формулы (6),
получимIЯ= ,откуда n =
,откуда n = (17)
(17)
Уравнение (17) п = f(IЯ) носит название скоростной характеристики и указывает на то, что частота вращения двигателя прямо пропорциональна подведенному напряжению и обратно пропорциональна магнитному потоку.
При пуске двигателя регулировочный реостат в цепи возбуждения полностью выводится, чтобы обеспечить максимальное значение силы тока в цепи возбуждения и магнитного потока статора. Из формулы (17) видно, что при большом пусковом токе в якоре уменьшается числитель, а при большом токе в цепи возбуждения увеличивается знаменатель, что обеспечивает плавный пуск двигателя при достаточном вращающем моменте якоря для преодоления механического сопротивления.
На практике пользуются
зависимостью п=f(М), называемой механической
характеристикой. Подставим
в уравнение (17) значение момента
двигателя (10) М =
СмФ IЯ,
в результате чего получимп=  —
— (18)
(18)
Полученное уравнение является уравнением механической характеристики, связывающим зависимость установившейся частоты вращения двигателя от момента при постоянном напряжении сети и сопротивлении цепи якоря.
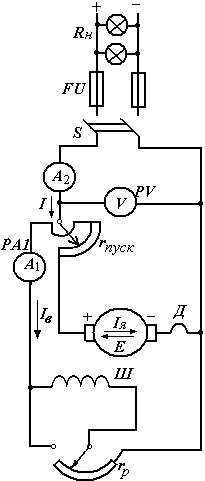 Рис.
27. Схема двигателя
постоянного
тока с параллельным
возбуждением
Рис.
27. Схема двигателя
постоянного
тока с параллельным
возбуждением
В двигателях параллельного
и независимого возбуждения поток Ф практически постоянный, поэтому
механическая характеристика представляется
уравнением прямой (рис. 28), слегка
наклоненной к оси абсцисс. В выражении
(18) первое слагаемое уравнения  носит название частоты идеального
холостого хода и обозначается n0 , второе слагаемое
носит название частоты идеального
холостого хода и обозначается n0 , второе слагаемое  — потери частоты вращения двигателя
под нагрузкой ∆n. Тогда уравнение
механической характеристики двигателя
можно записать так: п = п0 — ∆n. Изменение частоты
вращения двигателя при номинальной
нагрузке составляет (3-8) % п0. Такая механическая
характеристика считается жесткой.
— потери частоты вращения двигателя
под нагрузкой ∆n. Тогда уравнение
механической характеристики двигателя
можно записать так: п = п0 — ∆n. Изменение частоты
вращения двигателя при номинальной
нагрузке составляет (3-8) % п0. Такая механическая
характеристика считается жесткой.
Регулирование частоты вращения двигателя с параллельным возбуждением. Рассмотрим способы регулирования частоты вращения двигателя при неизменном тормозном моменте на валу.
Из уравнения механической характеристики (18) видно, что изменение п возможно при регулировании напряжения питания U, потока возбуждения Ф и величины сопротивления цепи якоря rЯ , CЕ и СМ — конструктивные коэффициенты, изменить которые мы не можем.
Регулирование частоты вращения изменением приложенного напряжения не применяется, так как с изменением силы тока изменяется и магнитный поток машины, а при малых напряжениях можно размагнитить машину.
А) Регулирование «на уменьшение потока» (полюсное регулирование)
Из формулы п0 =  следует, чточастота вращения идеального
холостого хода обратно пропорциональна
потоку. Пока магнитная система машины
не насыщена, поток можно считать
пропорциональным силе тока возбуждения IВ.
Следовательно, частоту вращения
двигателя можно регулировать изменением
силы тока возбуждения, для чего в цепь
возбуждения вводится реостат (рис.
27). С увеличением сопротивления rВ уменьшается сила
тока возбуждения IВ,
вследствие чего уменьшается поток Ф.
Уменьшение потока возбуждения ведет
к увеличению частоты вращения идеального
холостого хода п0. Потери частоты
вращения ∆n будут обратно пропорциональны квадрату
магнитного потока.
следует, чточастота вращения идеального
холостого хода обратно пропорциональна
потоку. Пока магнитная система машины
не насыщена, поток можно считать
пропорциональным силе тока возбуждения IВ.
Следовательно, частоту вращения
двигателя можно регулировать изменением
силы тока возбуждения, для чего в цепь
возбуждения вводится реостат (рис.
27). С увеличением сопротивления rВ уменьшается сила
тока возбуждения IВ,
вследствие чего уменьшается поток Ф.
Уменьшение потока возбуждения ведет
к увеличению частоты вращения идеального
холостого хода п0. Потери частоты
вращения ∆n будут обратно пропорциональны квадрату
магнитного потока.
Таким образом, изменением потока возбуждения можно регулировать частоту вращения двигателя. На рис. 29 приведены искусственные механические характеристики. При значительном уменьшении силы тока возбуждения (особенно при обрыве цепи возбуждения) силы тока якоря и частота вращения ненагруженного двигателя сильно возрастают, что может привести к опасным механическим повреждениям. Это явление недопустимо, поэтому двигатель должен быть снабжен автоматической защитой, отключающей его от сети при предельном уменьшении потока (ниже ‘/3ФН).
Регулирование «на уменьшение потока», называемое еще полюсным регулированием, весьма распространено, так как оно экономично и удобно в связи с тем, что сила тока возбуждения мала и мощность потерь в реостате мала.
Б) Реостатное регулирование.
При этом способе регулирования, при Ф=const,
последовательно с якорем включается
регулировочный реостат. Уравнение
механической характеристики имеет
вид: п=  —
— (19)
(19)
Анализ уравнения (19) показывает, что при изменении rР изменяется только ∆n, т. е. увеличивается наклон механической характеристики (рис.30). Изменяя rР, увеличивая его, можно получить семейство механических характеристик, более мягких, чем естественная механическая характеристика с частотой вращения п1, п2 и п3. У всех этих характеристик общая точка п0 — частота вращения идеального холостого хода двигателя. Такое регулирование неэкономично, так как через регулировочный реостат проходит весь ток якоря IЯ, а это обусловливает значительные потери мощности ∆Р = rР I2.

Рис. 28. Механическая характеристика двигателя с параллельным возбуждением
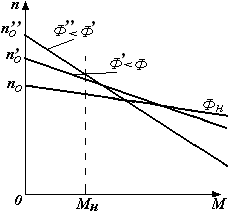
Рис. 29.Искусственные механические характеристики двигателя
Реверсирование двигателей постоянного тока. Под реверсированием понимают изменение направления вращения якоря двигателя.
Если изменить направление магнитного потока или тока якоря, то знак, а значит, и направление вращения двигателя изменятся. Однако одновременное изменение направления потока и тока якоря к изменению знака вращающего момента не приводит. Практически реверсирование осуществляется переключением выводов обмотки якоря или обмотки возбуждения.
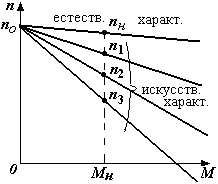 Рис. 30. Механические
характеристики реостатного регулирования
Рис. 30. Механические
характеристики реостатного регулирования
Двигатель постоянного тока с параллельным возбуждением
Существует несколько возможных разновидностей построения эл моторов, работающих от источника постоянного напряжения. Принцип их действия одинаков, а отличия заключаются в особенностях подключения обмотки возбуждения (ОВ) и якоря (Я).
Свое название эл двигатель постоянного тока с параллельным возбуждением получил потому, что его обмотка Я и ОВ соединяются друг с другом именно таким образом. Электродвигатель такой разновидности обеспечивает нужные режимы, превосходя изделия последовательного и смешанного типов тогда, когда требуется практически постоянная скорость его функционирования.
Построение двигателя и область его применения
Схема электродвигателя рассматриваемого типа изображена ниже.

- общий ток, потребляемый эл мотором от источника, составляет I = IЯ + IВ, где IЯ, IВ – токи через якорь, обмотку возбуждения, соответственно,
- одновременно IВ не зависит от IЯ, то есть не зависит от нагрузки.
Устройство применяется тогда, когда пуск не требует обеспечения высокого момента, то есть когда режимы эксплуатации приводных механизмов не предполагают создание больших стартовых нагрузок. Это типично для станков и вентиляторов.
Для практики ценны такие полезные тяговые параметры подобных эл механизмов как
- устойчивость работы при колебаниях нагрузки,
- высокая экономичность из-за того, что IЯ не протекает через ОВ.
Пуск при недостаточном моменте обеспечивается переходом на схему смешанного типа.
Поведение электромотора при изменении нагрузок
Механическая характеристика показывает устойчивость работы электромотора в широком диапазоне изменения нагрузок, описывая зависимость момента, создаваемого эл двигателем, от скорости функционирования вала.
Тяговые характеристики механизма рассматриваемого типа позволяют сохранить величину момента при значительных изменения количества оборотов. Обычно тяговые параметры агрегата должен обеспечивать уменьшение этого параметра не более чем на 5 %. Несложное исследование демонстрирует: тормозные параметры из-за обратимости процессов оказываются аналогичными. Эти положения распространяются также на случай применения смешанного возбуждения.
Говоря иными словами, для такого эл мотора характерна жесткая характеристика. Такой характер работы считается важным преимуществом агрегата рассматриваемого типа.
Разновидности подходов к регулированию частоты вращения
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
 Принцип действия параллельного включения обмоток обеспечивает плавный пуск в сочетании с большим диапазоном изменения оборотов в процессе работы с помощью реостатов. Они же обеспечивают нормальный пуск двигателя ограничением тока.
Принцип действия параллельного включения обмоток обеспечивает плавный пуск в сочетании с большим диапазоном изменения оборотов в процессе работы с помощью реостатов. Они же обеспечивают нормальный пуск двигателя ограничением тока.
Для агрегатов параллельного типа используются способы управления скоростью функционирования изменением:
- магнитного потока главных полюсов,
- сопротивления цепи якоря,
- подаваемого на него напряжения.
Объектом воздействия являются обмотка возбуждения, обмотка якоря, его рабочее напряжение.
Изменение магнитного потока осуществляется с помощью последовательного реостата RР. При увеличении его сопротивления ОВ пропускает меньший ток, что сопровождается уменьшением магнитного потока. Внешним проявлением такого действия становится наращивание оборотов Я на холостом ходу. Исследование показывает, что происходит увеличение угла наклона характеристики.
Второй принцип основан на включении в цепь питания якоря дополнительного последовательного регулировочного реостата. При увеличении его сопротивления скорость вращения Я уменьшается, тогда как его естественная механическая характеристика приобретает больший наклон. Из-за последовательного включения с основной обмоткой реостата дополнительного сопротивления, на котором рассеивается значительная мощность, происходит заметное падение экономичности.
Третий принцип сопровождается определенным усложнением схемных решений и требует применения отдельного регулируемого источника питания с сохранением возможности раздельного регулирования. В случае его применения в реальных условиях возможно только уменьшение частоты вращения вала.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения реализует третий подход к регулированию и интересен тем, что ОВ и М питаются от разных источников, схема его представлена ниже.

Обмотки простейшего электромотора параллельного независимого возбуждения
Для моторов в данном конструктивном исполнении Iв устанавливается неизменным, а меняется только напряжение, приложенное к М. Это сопровождается изменением числа оборотов на холостом ходу, но жесткость характеристики изменений не претерпевает.
Принцип работы такого агрегата за счет независимого функционирования двух источников оказывается более сложным. Однако, его применение дает такие важные для практики преимущества как
- плавное экономичное управление скоростью функционирования с большой глубиной,
- пуск мотора при пониженном напряжении без реостата.
В случае, если пуск происходит на нормальном напряжении, реостат ограничивает величину Iв.
Исследование показывает, что максимальное количество оборотов ограничено только сопротивлением М, а минимальное условиями отвода выделяемого тепла в процессе работы.
Характеристики в части энергопотребления и скорости срабатывания управляющей системы улучшаются в случае последовательного включения с М различных тиристорных регуляторов. Для установки числа оборотов вала и их стабилизации в процессе приведения в движение различных механизмов находят применение различные способы. Их общим характерным признаком является включение тиристорного регулятора в цепь частотной отрицательной обратной связи. Пуск такого агрегата требует реализации специальных процедур.
Заключение
Двигатель с параллельным возбуждением является очень гибким приводным механизмом и может использоваться в очень большом количестве областей там, где не требуются большие моменты при старте. Имеет несложные и надежные цепи регулирования скорости вращения, отличается простотой запуска.
5.Двигатель постоянного тока параллельного возбуждения.
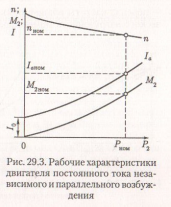
Если напряжение возбуждения Uв равно напряжению U, подведенного к цепи якоря, то применяют двигатель постоянного тока с параллельным возбуждением, т.е. обмотку возбуждения ОВ подключают параллельно обмотке якоря. Эксплуатационные свойства двигателей постоянного тока определяются их рабочими характеристиками. Рабочие характеристики представляют собой зависимость частоты вращения n, тока Iа в обмотке якоря, полезного момента М2 от полезной мощности двигателя Р2 при неизменных значениях напряжения питания U и тока в обмотке возбуждения Iв.
Характеристика n=f(P2).
Имеет вид кривой, наклоненной к оси
абсцисс. Такая форма характеристики
объясняется тем, что с ростом нагрузки
двигателя Р2 увеличивается ток якоря
Iа,
следовательно возрастает падение
напряжения в цепи якоря, что ведет к
снижению частоты вращения.(т.к. ,
где
,
где ).
В мощных двигателях реакция якоря
значительна и в опр.момент частота
вращения начнет возрастать и работа
двигателя становится неустойчивой. Для
компенсации этого послед-но обмотке
якоря включают стабилизирующую обмотку,
чтобы ее МДС была сонаправлена с МДС
ОВ. Это компенсирует размагн.действие
реакции якоря.
).
В мощных двигателях реакция якоря
значительна и в опр.момент частота
вращения начнет возрастать и работа
двигателя становится неустойчивой. Для
компенсации этого послед-но обмотке
якоря включают стабилизирующую обмотку,
чтобы ее МДС была сонаправлена с МДС
ОВ. Это компенсирует размагн.действие
реакции якоря.
Характеристика M2=f(P2). Определяется выражением М2=Р2/w=9,55P2/n. Если n = const, то график M2=f(P2) представляет собой прямую линию, выходящую из начала осей координат. Однако с ростом нагрузки двигателя, частота уменьшается, что приводит к нелинейности рассматриваемой характеристики.
Характеристики Ia=f(P2). Не выходит из начала осей координат, т.к. в режиме хх двигатель потребляет из сети ток холостого хода I0 и развивает момент хх М0, обусловленный механическими и магнитными потерями в двигателе.
Механические
характеристики. Представляет
собой графически выраженную зависимость
частоты вращения якоря n
от электромагнитного момента М при
неизменных напряжении питания и
сопротивлении реостата в цепи возбуждения.
Т.к. ,
, ,
имеем:
,
имеем:
, где
n0= — частота вращения двигателя при х.х.
∆n=
— частота вращения двигателя при х.х.
∆n= – величина перепада частоты вращения
якоря, вызванная действием статического
нагрузочного момента машины Мс.
– величина перепада частоты вращения
якоря, вызванная действием статического
нагрузочного момента машины Мс.
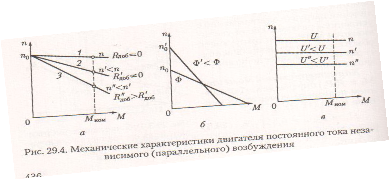
Если
пренебречь размагн.дейтвием реакции
якоря то мех.хар-ка имеет вид прямой,
наклоненной к оси абсцисс – естесственная
хар-ка. При увеличении нагрузки ∆n
увеличивается,  -уменьшается
и угол наклона изменяется. Так получаются
искусственные хар-ки (рис.а).
-уменьшается
и угол наклона изменяется. Так получаются
искусственные хар-ки (рис.а).
На форму данных характеристик влияет и Ф. При уменьшении Ф увеличивается и n0, и ∆n(обратно пропорционально Ф и Ф2 соответственно).Это приводит к резкому изменению жесткости мех.хар-ки(рис.б)
При изменении подводимого напряжения U n меняется пропорционально ему. ∆n не зависит от U. Поэтому жесткость хар-ки не изм-ся. Хар-ки двигаются вдоль оси ординат, оставаясь параллельными друг другу. (рис.в)
Исходя из всего этого регулирование частоты вращения двигателя можно изменением сопротивления цепи якоря, изменением основного магнитного потока Ф, изменением напряжения в цепи якоря, импульсным регулированием.
6.Генератор постоянного тока смешанного возбуждения.
Генератор смешанного возбуждения имеет параллельную и последовательную обмотки возбуждения. Поток возбуждения создается в основном параллельной обмоткой. Последовательная обмотка обычно включается согласно с параллельной (чтобы МДС обмоток складывались), что обеспечивает получение жесткой внешней характеристики генератора. В режиме хх генератор имеет только параллельное возбуждение, т.к. ток в последовательной обмотке возбуждения отсутствует. С появлением нагрузки возникает МДС последовательной обмотки возбуждения, которая подмагничивает машину, компенсирует размагничивающее действие реакции якоря и падение напряжения в якоре. В этом случае внешняя характеристика становится наиболее жесткой, т.е. напряжение на зажимах генератора при увеличении тока нагрузки остается практически неизменным (график 2). Если же требуется, чтобы напряжение на зажимах потребителя (в конце линии) оставалось практически неизменным, тот число витков последовательной обмотки увеличивают так, чтобы МДС этой обмотки компенсировала еще и падение напряжения в проводах (График 1).
При встречном включении обмоток возбуждения напряжение генератора с ростом тока нагрузки резко уменьшается (График 3).
Генераторы смешанного возбуждения с согласным включением обмоток возбуждения применяют для питания силовой нагрузки в случаях, когда требуется постоянство напряжения в линии.

5. Объяснить способы регулирования частоты вращения двигателя параллельного возбуждения.
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:

где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается к п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
6 . В каком случае и почему возможен «разнос» двигателя параллельного возбуждения?
С увеличением нагрузки скорость двигателя резко падает.
С уменьшением нагрузки на валу двигатель развивает очень большую частоту вращения. Говорят, что двигатель идет вразнос. Работа двигателя последовательного возбуждения без нагрузки недопустима.
7. Изобразить схему двигателя параллельного возбуждения и показать на ней токи и эдс.
В параллельных ветвях действуют одинаковые ЭДС, направленные встречно друг другу. При подключении к якорной обмотке сопротивления в параллельных ветвях возникают одинаковые токи , через сопротивление RH протекает ток IЯ.
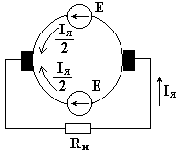
рис4 схема
ЭДС якорной обмотки пропорциональна частоте вращения якоря n2 и магнитному потоку индуктора Ф
где Се — константа.
В реальных электрических машинах постоянного тока используется специальное контактное устройство — коллектор. Коллектор устанавливается на одном валу с сердечником якоря и состоит из отдельных изолированных друг от друга и от вала якоря медных пластин. Каждая из пластин соединена с одним или несколькими проводниками якорной обмотки. На коллектор накладываются неподвижные контактные щетки. С помощью контактных щеток вращающаяся якорная обмотка соединяется с сетью постоянного тока или с нагрузкой.
23 Изобразите и поясните ход скоростных характеристик двигателей постоянного тока с параллельным возбуждением при различных токах возбуждения.

Скоростная и механическая характеристики двигателя определяются равенствами (6)
и (7) при U = const и iB = const. При
отсутствии дополнительного сопротивления в цепи якоря эти характеристики
называются естественными.
 (6)
(6)
(7)
Если щетки находятся на геометрической нейтрали, при увеличении Ia
поток Фδ несколько уменьшится вследствие действия
поперечной реакции якоря. В результате этого скорость n,
согласно выражению (6), будет стремиться возрасти. С другой стороны, падение
напряжения RaIa вызывает уменьшение
скорости. Таким образом, возможны три вида скоростной характеристики,
изображенные на рис; 1 — при преобладании влияния RaIa; 2 — при взаимной компенсации влияния RaIa и уменьшения; 3 — при преобладании влияния уменьшения Фδ.
Ввиду того что изменение Фδ относительно мало,
механические характеристики n=f(M) двигателя параллельного возбуждения,
определяемые равенством (7), при U= const и iB==
const совпадают по виду с характеристиками n= f(Ia)
(рис. 8). По этой же причине эти характеристики практически прямолинейны.
Характеристики вида 3 (рис. 8) неприемлемы по условиям устойчивости работы.
Поэтому двигатели параллельного возбуждения изготовляются со слегка падающими
характеристиками вида 1 (рис. 8). В современных высоко
использованных машинах ввиду довольно сильного насыщения зубцов, якоря влияние
поперечной реакции якоря может быть настолько большим, что получить
характеристику вида 1 (рис. 8) невозможно.
24 Что такое номинальная мощность генератора, двигателя?
Номинальной мощностью генератора постоянного тока называется полезная электрическая мощность машины, выраженная в ваттах или в киловаттах, которую генератор может развивать при номинальной нагрузке неограниченно долгое время, не перегреваясь выше допустимой температуры.Номинальная мощность Рн — это мощность, развиваемая двигателем на валу при работе с номинальной нагрузкой (моментом) и при номинальной частоте вращения nн.
25. Перечислите и поясните известные Вам способы улучшения коммутации.Выбор щеток. Целесообразно выбирать щетки с большим электрическим сопротивлением. Однако допустимая плотность тока в этих щетках невелика, а поэтому их применение в машинах с большим рабочим током ведет к необходимости увеличения площади щеточного контакта, что требует увеличения длины коллектора, а следовательно и габаритов машины. Поэтому щетки с большим электрическим сопротивлением применяют в машинах с небольшим рабочим током (в высоковольтных машинах).Увеличению переходного сопротивления щеточного контакта, а следовательно улучшению коммутации, способствует политура коллектора – тонкая оксидная пленка на поверхности коллектора, обладающая повышенным электрическим сопротивлением.Уменьшение реактивной ЭДС. Существенное влияние на суммарную ЭДС в коммутирующей секции оказывает реактивная ЭДС ер = еL+еМ.1) ЭДС взаимоиндукции еМ в значительной степени зависит от ширины щетки: чем шире щетка, тем большее число секций под ней одновременно коммутирует, что вызывает увеличение ЭДС взаимоиндукции еМ.Наиболее целесообразны щетки шириной 2-3 коллекторные пластины. Более узкие щетки нежелательны из-за недостаточной механической прочности, а также потому, что для создания необходимой площади щеточного контакта пришлось бы увеличивать её длину, а следовательно и габариты машины.При применении обмоток с укороченным шагом (у1<τ) пазовые стороны секций, коммутирующих под соседними щетками, оказываются в разных пазах. Это тоже способствует уменьшению ЭДС взаимоиндукции еМ.2) ЭДС самоиндукции еL может быть ослаблена уменьшением индуктивности секций. Для этого следует применять секции обмотки якоря с меньшим числом витков.Добавочные полюса. Предназначены для улучшения коммутации. Они создают в зоне коммутации магнитное поле такой величины и направления, чтобы наводимая этим полем в коммутирующей секции ЭДС была равна по величине и противоположна по направлению суммарной ЭДС Σе. Так как величина Σе зависит от величины тока якоря Iа, а ток зависит от нагрузки машины, то обмотку добавочных полюсов включают последовательно с обмоткой якоря. Добавочные полюса устанавливают между главными и их число равно числу главных или вдвое меньше.
29) Коллектор, состоит из пластин твер-дотянутой меди. Между пластинами коллектора прокладываются листочки из миканита (слюды) толщиной 0,5—1 мм. Пластины коллектора имеют выступ, напоминающий форму ласточкина хвоста. На вал со стороны якоря надевают изолирующую втулку, которая своим коническим выступом входит в прорезь ласточкина хвоста. С другой стороны коллекторные пластины удерживаются нажимным изолирующим диском, выступы которого также заходят в прорези ласточкина хвоста. Чтобы коллекторные Пластины не рассыпались, втулка и нажимной диск стягиваются болтами.
коллектор в генераторах постоянного тока служит для преобразования переменной э. д. с, индуктируемой в обмотке якоря, в постоянную э. д. с. на щетках генератора. Здесь интересно отметить, что если якорь генератора снабдить и коллектором и контактными кольцами, то от генератора можно получить и постоянное и переменное напряжение.
26) С увеличением тормозного момента, создаваемого механической нагрузкой двигателя, механическая мощность возрастает. Число оборотов якоря уменьшается, что приводит к уменьшению противо-ЭДС и росту тока, потребляемого двигателем, а, следовательно, к увеличению крутящего момента и возрастанию электрической мощности, потребляемой двигателем от сети.
31.Есть двигатели с параллельным возбуждением, имеющие так называемую стабилизирующую обмотку (но не обмотку возбуждения), которая выполняется толстым проводом (несколько витков) и подключается последовательно с обмоткой якоря. Она выполняется с расчетом около 10% возбуждения от параллельной обмотки возбуждения и предназначена для устойчивой работы двигателя в разных режимах (она ослабляет насыщение зубцов якоря от действия поперечной реакции якоря). Включать ее без параллельной обмотки возбуждения нельзя.
27) Замедленная коммутация. Если в области, где расположены коммутируемые секции, нет магнитного потока, то э. д. с. вращения равна нулю, и ΣE представляет собой нескомпенсированную реактивную э. д. с. По закону Ленца реактивная э. д. с. создает в короткозамкнутой секции ток Iд, который замедляет процесс. В результате этого коммутация оказывается замедленной, ток I проходит через 0 при t > Th/2
При замедленной коммутации α1 > α2 плотность тока Δ1 > Δ2. Повышенная плотность тока Δ1 на сбегающем крае щетки неблагоприятно влияет на коммутацию. Замедление процесса коммутации может вызывать искрение при разрыве цепи секции в момент, когда коллекторная пластина 1 отходит от щетки.
В случае, когда щетки стоят на геометрической нейтрали, коммутируемые секции вращаются в зоне потока поперечной реакции якоря. Если этот поток нескрмпенсирован, то индуктируемая им э. д. с. вращения усиливает ток Iд, и коммутация становится еще более замедленной.
Ускоренная коммутация. Для компенсации реактивной э. д. с. в областях, где расположены стороны коммутируемой секции, создают поток, направленный в противоположную сторону по отношению к потоку реакции якоря. В этом случае э. д. с. вращения направлена встречно реактивной э. д. с. и может ее скомпенсировать. При полной компенсации имеет место линейная коммутация. В случае перекомпенсации, т. е. когда э. д. с. вращения больше реактивной, добавочная составляющая тока Iд ускоряет процесс, и ток секции проходит 0 при t < Th/Такая коммутация называется ускоренной.
При ускоренной коммутации α1 < α2 плотность тока Δ1 < Δ2.
При чрезмерной плотности тока Δ2 на набегающем крае щетки может возникнуть искрение в момент замыкания секции, когда пластина 2 подходит к щетке.
На практике стремятся иметь такое значение потока в зоне расположения секций, чтобы коммутация была линейной или несколько ускоренной.
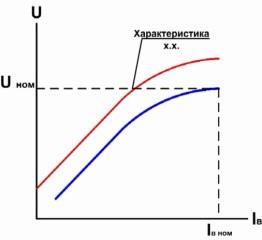
28) Это зависимость U=f(Iв) при неизменной нагрузке и постоянной частоте вращения. В нагрузочном режиме напряжение на выводах генератора ниже, чем в режиме х.х., что объясняется появлением тока в обмотке якоря.
На холостом ходу напряжение ГПТ U0=Еа, а при работе под нагрузкой U=Еа-Iа·Rа, так как появилось падение напряжения на активном сопротивлении цепи якоря.
Следовательно, нагрузочная характеристика будет располагаться на графике ниже характеристики х.х.
При насыщенной магнитной системе характеристики U=f(Iв) и U0=f(Iв) не будут параллельны друг другу, так как уменьшится ЭДС Еа из-за размагничивающего влияния реакции якоря.
обмоток возбуждения различают: независимого, параллельного, последовательного и смешанного возбуждения.
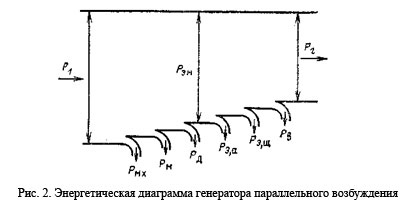
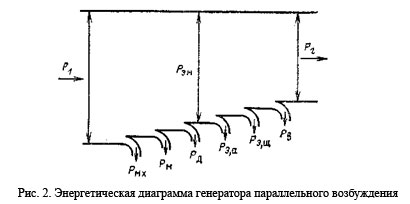
33.Энергетическая диаграмма генератора независимого возбуждения представлена на рис. 2. Получаемая от первичного двигателя механическая мощность Р1 за вычетом потерь механических рмх, магнитных рмг и добавочных ря преобразуется в якоре в электромагнитную мощность РЭш. Мощность РЭш частично тратится на электрические
Рис. 2. Энергетическая диаграм- потери ръл№ в цепи якоря (в обмотках якоря, добавочных полюсов и в компенсационной и в переходном сопротивлении щеточного контакта), а остальная часть этой мощности представляет собой полезную мощность Р%, отдаваемую потребителям. Потери на возбуждение рв в генераторе независимого возбуждения покрываются за счет постороннего источника тока.
На основании изложенного для генератора независимого возбуждения имеем уравнение мощностей
34.Произведение E Ia=Pэм называется электромагнитной мощностью и представляет собой суммарную электрическую мощность, которая получается в результате преобразования механической мощности. Часть этой мощности расходуется в цепи якоря на электрические потери в обмотках (I2aΣra= Pэ,а) и в переходном сопротивлении щеточного контакта (ΔUщIa= Pэ,щ). Остальная часть мощности, равная произведению UIa, является отдаваемой мощностью генератора. В генераторах независимого возбуждения эта мощность поступает во внешнюю сеть и представляет собой полезную мощность генератора P2:P2 = UIa.
В генераторах параллельного и смешанного возбуждения полезная мощность P2, отдаваемая в сеть, меньше на значение мощности, затрачиваемой на возбуждение:P2 = UIa — Pв.
К генератору от двигателя, приводящего во вращение его якорь ,подводится механическая мощность P1. Большая часть этой мощности преобразуется в электромагнитную Pэм, а другая ее часть расходуется в генераторе на покрытие механических потерь Pмх(трение в подшипниках, вентиляцию), магнитных потерь в стали якоря Pм и добавочных потерь Pд:P1 = Pэм + Pмх.+ Pм + Pд.
Для генераторов независимого возбуждения мощность, затрачиваемая на возбуждение, поступает от постороннего источника, поэтому в левой части (7) следует принимать
P1 = Pэм + Pмх.+ Pм + Pд + Pв.
Отношение P2/P1=η представляет собой КПД генератора. Рассмотренное преобразование мощности в генераторах постоянного тока для наглядности можно представить в виде энергетической диаграммы (рис. 2). Эта диаграмма построена для генератора параллельного возбуждения.
Уравнение равновесия моментов. Поделив правую и левую части уравнения (7) на угловую скорость якоря Ω=2πn/60, получим уравнение момента:P1/Ω = Pэм/Ω + (Pмх.+ Pм + Pд)/Ω, или М1 = М + (Pмх.+ Pм + Pд)/Ω.
Электромагнитный момент М в генераторе направлен против вращения и равен М=cMIaФ. При увеличении тока Ia возрастает электромагнитный момент и, следовательно, момент и мощность, поступаемая от приводного двигателя.