


Пуск и тормозные режимы двигателя постоянного тока независимого возбуждения ДПТ НВ
Ответственным моментом при эксплуатации двигателей постоянного тока является их пуск. При включении двигателя в сеть в начальный момент ток в цепи якоря ограничивается лишь электрическим сопротивлением цепи якоря, так как в неподвижном якоре ЭДС не индуцируется. Поэтому начальный пусковой ток при непосредственном включении двигателя в сеть может достигать опасных значений, способных нарушить работу щеточно- коллекторного узла и вызвать «круговой огонь» на коллекторе. Кроме того, такой ток создаст чрезмерно большой пусковой момент, оказывающий на вращающиеся части электропривода ударное воздействие, способное вызвать их механическое разрушение.Эффективным средством ограничения пускового тока в двигателях постоянного тока является применение пусковых реостатов. Существует два метода расчета пусковых реостатов: графический и аналитический.
Графический метод расчета пусковых реостатов
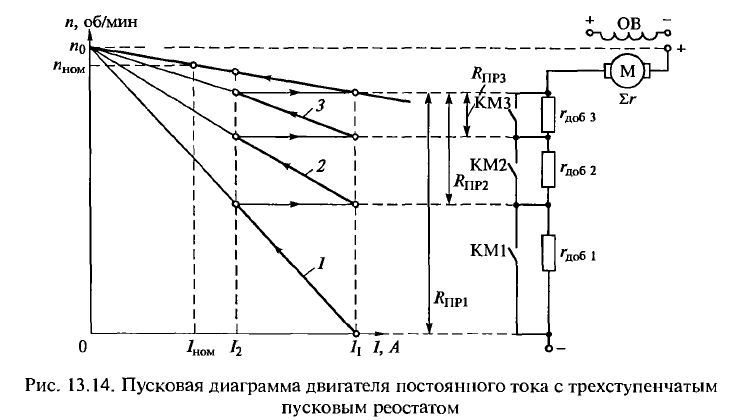
В основе графического метода лежит пусковая диаграмма двигателя. Пусковая диаграмма, представленная на рис. 13.14, совмещена с трехступенчатым пусковым реостатом; K1, К2 и КЗ являются контактами силовых контакторов, посредством которых осуществляется переключение ступеней реостата, а rдоб1, rдоб2 и rдоб3 — резисторы ступеней пускового реостата. Механические характеристики 1, 2, 3 соответствуют ступеням пускового реостата RПР1, RПР2 и RПР3. Значения начального пускового тока I1 и тока переключений реостатов I2 обычно принимают
I1 = (1,5…2,5)Iaном
I2 = (1,0…1,3)Iaном
при этом ток переключений I2 должен быть не меньше тока нагрузки, соответствующего статическому моменту сопротивления нагрузки МС, на вал двигателя. Для двигателей специального назначения, с тяжелыми условиями работы, например двигателей краново-металлургических серий, указанные значения токов могут быть увеличены.
Аналитический метод расчета пусковых реостатов
При аналитическом методе расчет сопротивлений резисторов пускового реостата ведут по формулам:
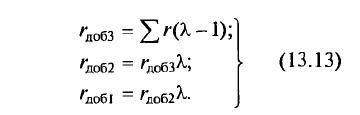
В этих выражениях λ = I1/I2 представляет собой отношение начального пускового тока I1 к току переключений I2. При работе двигателя от регулируемого преобразователя напряжения необходимость в пусковом реостате отпадает, так как пуск двигателя можно начинать с любого пониженного значения напряжения на обмотке якоря в соответствии с допустимым значением начального пускового тока.
Тормозные режимы двигателей постоянного тока независимого возбуждения дпт нв
Помимо основного (двигательного) режима работы в двигателях постоянного тока независимого (параллельного) возбуждения возможны тормозные режимы.
Генераторное рекуперативное торможение
Этот режим наступает, когда частота вращения якоря превышает частоту вращения холостого хода n0.
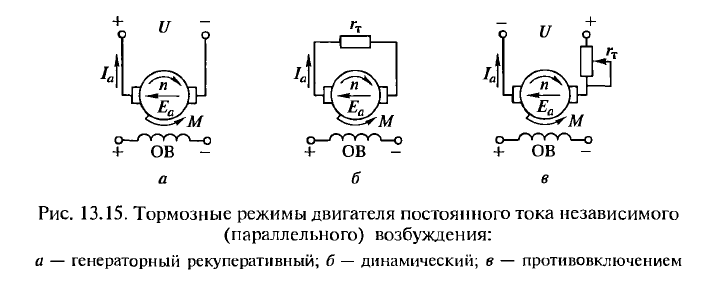
В этих условиях ЭДС машины Еа = сеФn0 превышает напряжение питающей сети (Еа > Uном), при этом ток якоря, а следовательно, и электромагнитный момент меняют свое направление на противоположное. В итоге машина постоянного тока переходит в генераторный режим и вырабатываемую при этом электроэнергию отдает в сеть. Электромагнитный момент двигателя становится тормозящим и противодействует внешнему вращающему моменту, создаваемому силами инерции вращающего с прежней скоростью якоря (рис. 13.15, а). Этот процесс торможения будет продолжаться до тех пор, пока частота вращения якоря, уменьшаясь, не достигнет значения n0.
Таким образом, для перехода двигателя в режим генераторного рекуперативного торможения не требуется изменений в схеме включения двигателя.
Генераторное рекуперативное торможение — наиболее экономичный вид торможения, так как он сопровождается возвратом энергии в сеть. Применение этого способа торможения является эффективным энергосберегающим средством в электроприводе Он целесообразен в электротранспортных средствах, работа которых связана с частыми остановками и движением под уклон. В этом случае кинетическая энергия движения транспортного средства (трамвай, троллейбус, электропоезд) преобразуется в электрическую энергию и возвращается в сеть.
Возможен способ перевода двигателя в режим генераторного рекуперативного торможения и при установившейся частоте вращения якоря. Для этого необходимо увеличить в двигателе магнитный поток возбуждения, т.е. ток в обмотке возбуждения.
Из выражения ЭДС якоря Еа = сеФn следует, что с ростом магнитного потока возбуждения Ф при неизменной частоте вращения n ЭДС якоря Еа увеличивается, что ведет к уменьшению тока в цепи якоря:

При ЭДС Еа = U ток якоря Ia = 0, а частота вращения якоря достигает значения n = n0. При дальнейшем увеличении потока возбуждения Ф, а следовательно, возрастании ЭДС якоря Еа пограничная частота вращения снижается (см. 13.12, б), а частота вращения якоря, оставаясь практически неизменной за счет сил инерции вращающихся частей электропривода, начинает превышать пограничную частоту n0. При этом ЭДС якоря превышает напряжение сети и двигатель переходит в режим генераторного рекуперативного торможения.
Динамическое торможение.
Необходимость в таком торможении возникает в том случае, когда после отключения двигателя от сети его якорь под действием кинетической энергии движущихся масс электропривода продолжает вращаться. Если при этом обмотку якоря, отключив от сети, замкнуть на резистор rт, то двигатель перейдет в генераторный режим (обмотка возбуждения должна оставаться включенной в сеть). Вырабатываемая при этом электроэнергия не возвращается в сеть, как это происходит при рекуперативном торможении, а преобразуется в теплоту, которая выделяется в сопротивлении
В режиме динамического торможения ЭДС якоря не меняет своего направления, но поскольку якорь отключен от сети (U = 0), то ток якоря изменит направление, так как будет создаваться ЭДС Еа
т.е. станет отрицательным. В результате электромагнитный момент также
изменит направление и станет тормозящим (рис. 13.15, б). Процесс торможения продолжается до полной остановки якоря (n = 0).
Торможение противовключением.
Допустим, что двигатель работает в основном (двигательном) режиме с номинальной нагрузкой. При отключении двигатели от сети вращающий
момент М = 0, но якорь двигателя за счет кинетической энергии вращающихся масс электропривода некоторое время будет продолжать вращение, т.е. произойдет выбег двигателя.
Чтобы уменьшить время выбега двигателя, применяют торможение противовключением. С этой целью изменяют полярность напряжения на клеммах обмотки якоря (полярность клемм обмотки возбуждения должна остаться прежней) и напряжение питания обмотки якоря становится отрицательным (- U). Но якорь двигателя под действием кинетической энергии вращающихся масс электропривода сохраняет прежнее (положительное) направление вращения, и так как направление магнитного потока не изменилось, то ЭДС якоря Еа также не меняет своего направления и действует согласно напряжению (-U), при этом ток якоря создается суммой напряжения сети U и ЭДС якоря Еа
(рис. 13.15, в):
где rт, — сопротивление резистора в цепи якоря двигателя.
В этих условиях электромагнитный момент станет отрицательным.
Под действием тормозящего момента — Mт, частота вращения якоря уменьшается, достигнув нулевого значения.Если в этот момент цепь якоря не отключить от сети, то произойдет реверсирование двигателя и его якорь под действием момента, который прежде был тормозным, начнет вращение в противоположную сторону. При этом двигатель перейдет в двигательный (основной) режим с отрицательными значениями частоты вращения и вращающего момента. Во избежание нежелательного реверсирования операцию торможения противовключением автоматизируют, чтобы при нулевом значении частоты вращения цепь якоря отключалась от сети.
Возбуждение двигателя постоянного тока
Наличие обмотки возбуждения (ОВ) у двигателя постоянного тока позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
Двигатель с независимым возбуждением
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.
ДПТ с параллельным возбуждением
По сути, схема подключения ОВ с параллельным возбуждением(рис.2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.
ДПТ с последовательным возбуждением
При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”.
ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Похожие публикации
2.2. Двигатель постоянного тока независимого возбуждения (дпт-нв)
Обмотки возбуждения и якоря этого двигателя питаются от разных источников (рис. 2.3,а). Где UB и IB – напряжение источника питания и ток обмотки возбуждения; U и IЯ – напряжение источника питания и ток якоря. Функцию обмотки возбуждения у таких двигателей может выполнять и постоянный магнит (рис. 2.3,б).
Д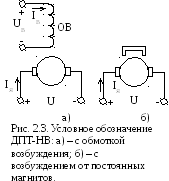 ля
двигателя с независимым возбуждением
величина
ля
двигателя с независимым возбуждением
величина
Характерные точки характеристик
1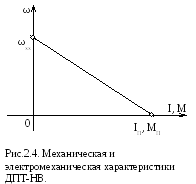 .
ПриIЯ = 0 и М
= 0; ω
= ωхх (ωхх – скорость
холостого хода двигателя). В режиме
холостого хода механическая нагрузка
на валу двигателя отсутствует.
.
ПриIЯ = 0 и М
= 0; ω
= ωхх (ωхх – скорость
холостого хода двигателя). В режиме
холостого хода механическая нагрузка
на валу двигателя отсутствует.
2.
При ω = 0; IЯ = IП и М
= М
2.2.1. Регулирование частоты вращения двигателя постоянного тока независимого возбуждения
Основное преимущество двигателей постоянного тока перед двигателями переменного тока – это относительная легкость регулирования частоты вращения. Известно несколько способов регулирования скорости, которые можно получить из анализа зависимостей (2.4) или (2.5). Регулирование осуществляют: путем изменения сопротивления обмотки якоря, точнее включением последовательно с ней добавочного сопротивления; изменением потока возбуждения или напряжения питания якоря.
Первый способ отличают небольшие затраты на его осуществление, но при эксплуатации, из-за больших потерь мощности на добавочном сопротивлении, его целесообразно применять только для маломощных двигателей и там, где не предъявляется больших требований к стабильности скорости, т.к. этот способ снижает жесткость механической характеристики двигателя.
Н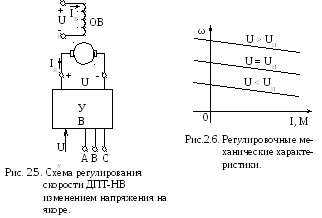 а
практике изменение магнитного потока
возбуждения возможно только в сторону
его уменьшения, т.к. при увеличении
потока, требуется повысить ток возбуждения
выше номинального, что приведет к
перегреву обмотки возбуждения и двигателя
в целом. Кроме того, двигатель рассчитан
и сконструирован так, что его магнитная
система близка к насыщению, поэтому
увеличение тока возбуждения не приведет
к заметному росту потока возбуждения.
Однако, уменьшение потока возбуждения
из (2.4) приводит к росту скорости двигателя.
На практике же в большинстве случаев
требуется ее снижать, что в данном
способе невозможно.
а
практике изменение магнитного потока
возбуждения возможно только в сторону
его уменьшения, т.к. при увеличении
потока, требуется повысить ток возбуждения
выше номинального, что приведет к
перегреву обмотки возбуждения и двигателя
в целом. Кроме того, двигатель рассчитан
и сконструирован так, что его магнитная
система близка к насыщению, поэтому
увеличение тока возбуждения не приведет
к заметному росту потока возбуждения.
Однако, уменьшение потока возбуждения
из (2.4) приводит к росту скорости двигателя.
На практике же в большинстве случаев
требуется ее снижать, что в данном
способе невозможно.
Поэтому
лучшим способом является регулирование
скорости путем изменения напряжения
питания якоря. В этом способе якорь
двигателя подключают к регулируемому
источнику постоянного тока, в качестве
которого обычно служит управляемый
выпрямитель УВ рис. 2.5. Управляемый
выпрямитель обычно питается переменным
трехфазным напряжением. Величиной
выходного постоянного напряжения U
управляют, например, путем изменения
величины управляющего напряжения U
Реверс двигателя (изменение направления вращения якоря) осуществляют, меняя полярность источника питания якорной цепи или цепи возбуждения.
Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ) — Help for engineer
Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ)
Двигатель постоянного тока последовательного возбуждения представляет собой электрическую машину постоянного тока, в которой обмотка возбуждения подключена последовательно с обмоткой якоря. Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен току в обмотке возбуждения I=Iв=Iя, что является его главной отличительной особенностью от остальных типов двигателей.

Рисунок 1 – Схема подключения ДПТ ПВ
Стоит обратить внимание на зависимость магнитного потока от нагрузки Ф=f(Iя). Если двигатель будет работать на 25% своей номинальной мощности или меньше, то магнитный поток будет крайне мал, что приведет к постоянному увеличению скорости вала. Препятствовать разгону будут лишь механические потери, и двигатель пойдет в «разнос». Это приведет к быстрому выходу машины из строя. Все описанное в соответствии с формулой:
Исходя из вышесказанного, ДПТ ПВ нельзя использовать на холостом ходу, постоянно требуется контроль тока якоря. С этой целью последовательно с обмоткой возбуждения устанавливают минимальное токовое реле, которое замыкает якорную цепь только в том случае, если нагрузка на валу достаточна для поддержания номинальной работы двигателя.
Пуск двигателя производят с пусковым сопротивлением, также включенным последовательно в цепь якоря. После пуска это сопротивление выводят, и машина продолжает работать в номинальном режиме на своей естественной характеристике.
Механическая и электромеханическая характеристики ДПТ ПВ одинаковы и имеют гиперболический вид (рисунок 2).
Рисунок 2 – Механическая и электромеханическая характеристики ДПТ ПВ
Скорость вращения ротора двигателя постоянного тока с последовательным возбуждением производится регулированием двух параметров:
| — питающее напряжение; | ||
| — магнитный поток полюсов двигателя. |
Для изменения скорости при помощи входного напряжения, в роторную цепь вводят специальное добавочное сопротивление, или же можно использовать пусковой реостат и для этой цели. Но следует заметить, данный способ является крайне неэкономичным и нецелесообразным, так как большое количество энергии будет рассеиваться на реостате.
Регулировка скорости изменением магнитного потока, осуществляется включением реостата параллельно обмотке возбуждения. Изменяя сопротивление – меняем ток, протекающий через обмотку возбуждения. Иногда обмотку возбуждения разбивают на несколько параллельных секций. В некоторых типах двигателей предусмотрена возможность отключения витков обмотки, так добиваются того же эффекта регулирования.
Тормозные режимы
В данном двигателе отсутствует режим генераторного торможения с отдачей энергии в сеть. На рисунке 2 вы можете видеть, что ветка гиперболы естественной характеристики не пересекает ось ординат (отрицательная скорость отсутствует).
Торможение противовключением получают путем переключения выводов якорной обмотки.
ДПТ ПВ нельзя соединять с механизмом при помощи ременной передачи, так как соскакивание или разрыв ремня приведет к разгрузке двигателя, что вызовет мгновенное повышение числа оборотов и последующему выходу из строя.
ДПТ ПВ нашли свое основное применение в качестве тяговых двигателей подвижного состава электровозов общего назначения, электровозов метрополитена и в трамваях.
Недостаточно прав для комментирования
36. Характеристика дпт со смешанным возбуждением.
Принципиальная схема электродвигателя смешанного возбуждения приведена на рис. 1. В этом двигателе имеются две обмотки возбуждения – параллельная (шунтовая, ШО), подключенная параллельно цепи якоря, и последовательная (сериесная,СО), подключенная последовательно цепи якоря. Эти обмотки по магнитному потоку могут быть включены согласно или встречно.
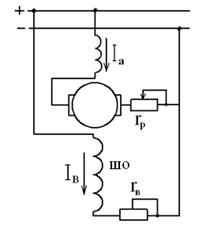
Рис. 1 — Схема электродвигателя смешанного возбуждения.
При согласном включении обмоток возбуждения их МДС складываются и результирующий поток Ф примерно равен сумме потоков, создаваемых обеими обмотками. При встречном включении результирующий поток равен разности потоков параллельной и последовательной обмоток. В соответствии с этим, свойства и характеристики электродвигателя смешанного возбуждения зависят от способа включения обмоток и от соотношения их МДС.
Скоростная характеристика n=f (Ia) при U=Uн и Iв=const (здесь Iв — ток в параллельной обмотке).
С увеличением нагрузки результирующий магнитный поток при согласном включении обмоток возрастает, но в меньшей степени, чем у двигателя последовательного возбуждения, поэтому скоростная характеристика в этом случае оказывается более мягкой, чем у двигателя параллельного возбуждения, но более жесткой, чем у двигателя последовательного возбуждения.
Соотношение между МДС обмоток может меняться в широких пределах. Двигатели со слабой последовательной обмоткой имеют слабо падающую скоростную характеристику (кривая 1, рис. 2).
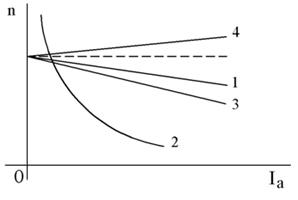
Рис. 2 — Скоростные характеристики двигателя смешанного возбуждения.
Чем больше доля последовательной обмотки в создании МДС, тем ближе скоростная характеристика приближается к характеристике двигателя последовательного возбуждения. На рис.2 линия 3 изображает одну из промежуточных характеристик двигателя смешанного возбуждения и для сравнения дана характеристика двигателя последовательного возбуждения (кривая 2).
При встречном включении последовательной обмотки с увеличением нагрузки результирующий магнитный поток уменьшается, что приводит к увеличению скорости двигателя (кривая 4). При такой скоростной характеристике работа двигателя может оказаться неустойчивой, т.к. поток последовательной обмотки может значительно уменьшить результирующий магнитный поток. Поэтому двигатели со встречным включением обмоток не применяются.
Механическая характеристика n=f (М) при U=Uн и Iв=const. двигателя смешанного возбуждения показана на рис.3 (линия 2).
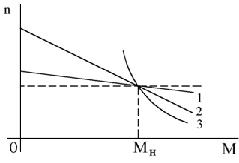
Рис. 3 — Механические характеристики двигателя смешанного возбуждения.
Она располагается между механическими характеристиками двигателей параллельного (кривая 1) и последовательного (кривая 3) возбуждения. Подбирая соответствующим образом МДС обеих обмоток, можно получить электродвигатель с характеристикой, близкой к характеристике двигателя параллельного или последовательного возбуждения.