


МОДУЛЬ ДРАЙВЕРА МОТОРА BLDC
Эта статья предоставит важную теорию и полезные схемы драйверов двигателей жестких дисков, которые можно заставить крутиться с разной скоростью и разных направлениях, а уж где это использовать — решайте сами. Прежде всего обратите внимание, что обычный двигатель шпинделя жесткого диска (HDD) на самом деле является бездатчиковым трехфазным бесколлекторным двигателем постоянного тока BLDC.
Как следует из названия, в бесщеточном (бесколлекторном) двигателе щетки не используются. Бесщеточный двигатель преодолевает потребность в механическом коммутаторе, меняя настройку на обратную, то есть катушки становятся статором, а постоянные магниты становятся частью ротора. Вращение двигателя достигается за счет изменения направления магнитных полей, создаваемых неподвижными катушками. Поскольку ротор представляет собой постоянный магнит, ему не нужен ток, что устраняет необходимость в щетках и коммутаторе. Чтобы контролировать вращение можно регулировать величину и направление тока в этих неподвижных катушках извне.
Типичный бесколлекторный двигатель постоянного тока с тремя катушками на статоре будет иметь шесть проводов, но в большинстве конструкций три провода будут подключены внутри, а остальные три выходят наружу. Также обратите внимание, что трехфазный бесщеточный двигатель требует трех датчиков Холла для определения положения ротора. В зависимости от физического положения этих датчиков, существует два типа выходных сигналов — фазовый сдвиг 60 ° и фазовый сдвиг 120 °. Комбинируя сигналы трех датчиков Холла, можно определить точную последовательность электронной коммутации. Но в бессенсорном бесщеточном моторе сигналы обратной электродвижущей силы (BEMF) контролируются драйвером для коммутации сигнала вместо положения, определяемого датчиками Холла. Вот поперечное сечение трехфазного бесщеточного двигателя на изображении ниже.
Это 4-х проводный двигатель BLDC от жесткого диска. HDD BLDC имеет четыре соединительных провода вместо трех упомянутых проводов ABC (часто обозначаемых как UVW).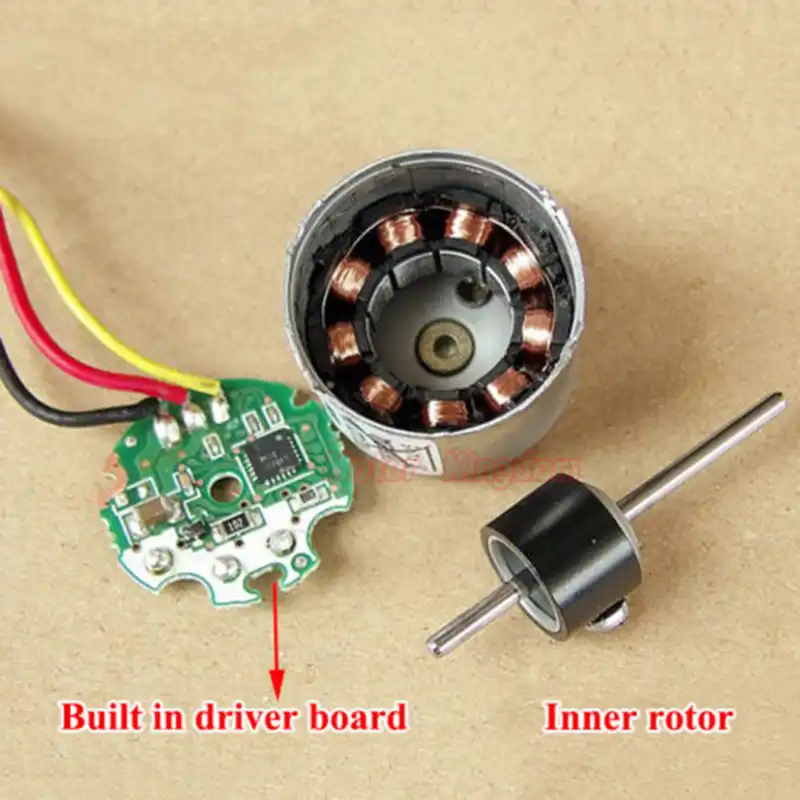 И 4-х контактный двигатель BLDC — это обычный трехфазный двигатель BLDC с выведенным центральным отводом. Если у двигателя есть фазы сопротивлением по 1 Ом каждая, то он должен давать 1 Ом от центрального ответвления до каждой фазы, 2 Ом между фазами. Хотя некоторые драйверы двигателей BLDC используют центральный отвод для измерения BEMF для коммутации.
И 4-х контактный двигатель BLDC — это обычный трехфазный двигатель BLDC с выведенным центральным отводом. Если у двигателя есть фазы сопротивлением по 1 Ом каждая, то он должен давать 1 Ом от центрального ответвления до каждой фазы, 2 Ом между фазами. Хотя некоторые драйверы двигателей BLDC используют центральный отвод для измерения BEMF для коммутации.
Существует два типа мотора BLDC. Первый имеет встроенные датчики Холла для определения положения ротора, а второй — бессенсорный — не имеет датчика. Коммутация бессенсорного типа обычно основана на BEMF, генерируемой в обмотках статора.
Как запустить двигатель HDD 4-х проводной
Так как можно управлять двигателем HDD BLDC? Чтобы вращать его, нужно контролировать направление и синхронизацию тока в катушках статора, но этот метод управления более сложен. В продаже доступен широкий спектр бессенсорных микросхем драйверов двигателей BLDC, например DRV10866, цена модуля вполне доступная в интернет-магазинах.
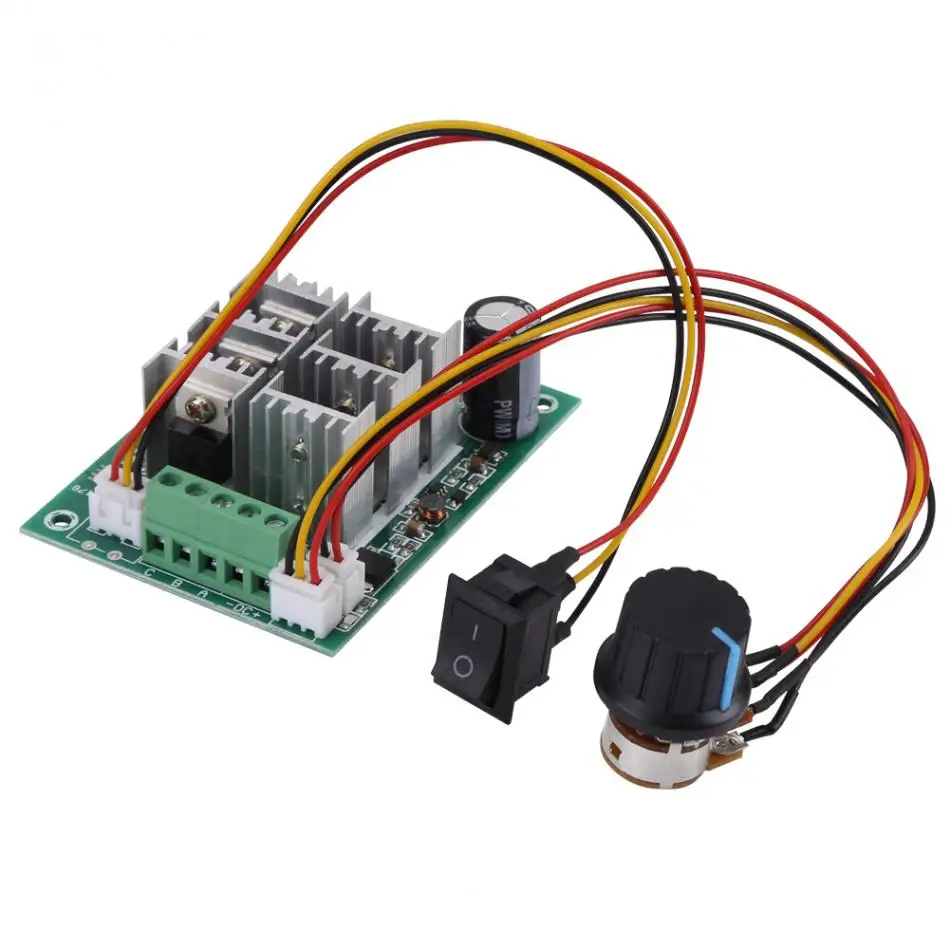
DRV10866 — довольно популярная микросхема драйвера трехфазного бесщеточного двигателя без датчиков, интегрированная с шестью МОП-транзисторами с пиковыми токами до 680 мА. Она также предлагает синхронное выпрямление с широтно-импульсной модуляцией (PWM) и бессенсорную запатентованную схему управления обратной ЭДС (BEMF). Но есть и другое решение — универсальная плата драйвера двигателя BLDC для жестких дисков. Плата может использоваться для управления как 3-проводными, так и 4-проводными трехфазными бесщеточными двигателями постоянного тока. Кроме того тут есть несколько полезных опций, таких как управление скоростью и направлением вращения двигателя.
Описание платы драйвера двигателя
Контроллер платы драйвера бесщеточного двигателя 5 В — 12 В постоянного тока для двигателя жесткого диска.
- Подходит для бесколлекторных моторов без датчика.

- Защита от обратного напряжения
- Защита от повышенного тока
- Напряжение привода: 5-12 В
- Рабочий ток: до 1,2 А
- Диапазон скорости: 0-100%
- Управление вращением: CW и CCW

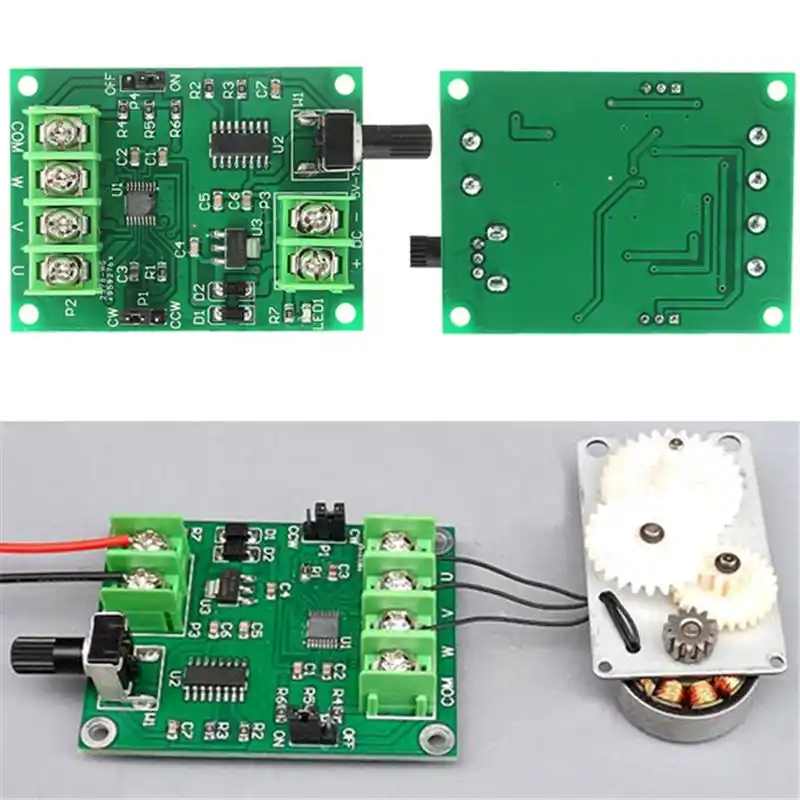
Плата сконструирована так, что требуются проводные соединения только с двигателем и источником питания. Минимальное рекомендуемое Vin составляет 5 В, а максимальное — 12 В постоянного тока. Потенциометр встроенного регулятора меняет скорость двигателя. Кроме того, есть две перемычки для выбора 3-проводного / 4-проводного мотора и выбора прямого / обратного направления. Для нормальной работы все перемычки должны быть установлены. В общем вполне удобное решение для управления трехфазными бессенсорными бесщеточными двигателями.
Плата использует комбинацию стабилизатора напряжения с низким падением напряжения (LDO), микроконтроллера для генерации сигналов с широтно-импульсной модуляцией (PWM) для трехфазного бесщеточного двигателя BLDC. Основная часть — драйвер двигателя — это DRV11873, один трехфазный бессенсорный драйвер BLDC от Texas Instruments.
16-контактный микроконтроллер (U1) настроен для подачи сигнала ШИМ (чуть ниже 25 кГц) на DRV11873 (U2) с потенциометром (W1) для регулировки скорости мотора путем изменения рабочего цикла ШИМ. Выход сигнала ШИМ может быть отведен от точки пайки, как показано на следующем изображении. Встроенная перемычка P1 соединена с выводом FR DRV11873, так что по умолчанию вывод остается в низком состоянии для вращения вперед (при переставлении вывод поднимается по потенциалу, и двигатель вращается в обратном направлении).
Следующая перемычка P4, подключенная к контакту COM DRV11873, предназначена для выбора 3-проводного / 4-проводного привода. На плате припаяны три дополнительных резистора (R4-R5-R6) для создания виртуального центрального отвода / нейтральной точки (для получения последовательности коммутации) для реализации 3-проводного привода двигателя BLDC.
Если выбирать вариант «сделай сам», стоит отметить, что оба чипа TI (DRV10866 и DRV11873) не сложно собирать.
Для упрощения в качестве генератора ШИМ было бы лучше взять таймер 555 как широтно-импульсный модулятор, способный выдавать выходной сигнал примерно 25 кГц с рабочим циклом, который может изменяться от 5% до 95%.

И вот еще одна плата, похожая на описанную, но с небольшими изменениями в компоновке деталей. Микросхема драйвера двигателя — DRV11873, микроконтроллер — STC15W404A, регулятор напряжения — HT7550-1.
В общем найти подходящий драйвер для двигателя жесткого диска или оптического привода вполне возможно, в продаже есть десятки вариантов модулей, просто нужно выбрать правильный.
Форум по HDD электромоторам
Форум по обсуждению материала МОДУЛЬ ДРАЙВЕРА МОТОРА BLDC
Контроллеры бесколлекторных двигателей Сервосила
Контроллеры бесколлекторных двигателей
Контроллеры СЕРВОСИЛА — это встраиваемые блоки управления для сервоприводов и тяговых электроприводов. Контроллеры превращают любой бесколлекторный электродвигатель в сервопривод или в интеллектуальный тяговый электропривод.
Контроллеры превращают любой бесколлекторный электродвигатель в сервопривод или в интеллектуальный тяговый электропривод.
Контроллеры предназначены для управления бесколлекторными двигателями (PMSM, BLDC) любых производителей в сочетании с различными энкодерами абсолютного положения вала (BISS-C, SSI, SPI, ШИМ, квадратурный) или без них. Для подключения к управляющим компьютерам АСУ или к бортовым системам управления контроллеры предоставляют интерфейсы управления CAN и USB 2.0
Контроллеры бесколлекторных двигателей поставляются в двух исполнениях — плата прямоугольной формы (модель SC-25R) и плата круглой формы (модель SC-25C). Данные модели совершенно идентичны по интерфейсам и возможностям и отличаются только формой плат. Максимальный ток фазы двигателя — 25А.
Основными областями применения данных контроллеров бесколлекторных двигателей являются:
- сервомеханизмы, сервоприводы,
- тяговые электроприводы,
- АСУ ТП, промышленные линии, конвейеры, насосы,
- робототехнические устройства,
- интеллектуальное торговое оборудование,
- автоматизированное складское оборудование,
- испытательные стенды с компьютерным управлением,
- системы измерения и автоматической диагностики,
- тяговые электроприводы различных мобильных шасси,
- станки с ЧПУ,
- системы компьютерного зрения.
- Бесколлекторные (PMSM и BLDC), в том числе Maxon, Dunker и других.
- Бездатчиковые и с датчиками Холла (Sensorless и Sensored).
- Со встроенными энкодерами и с внешними энкодерами.
- Коллекторные (до 2шт одновременно) и соленоиды.
- Квадратурный интерфейс с индекс-сигналом,
- BISS-C интерфейс (в том числе к магнитным датчикам фирмы RLS),
- SSI интерфейс,
- ШИМ интерфейс,
- SPI интерфейс.
Датчики абсолютного положения вала («энкодеры») применяются в различных режимах сервоуправления, а также для поддержания плавного движения вала на низких скоростях вращения.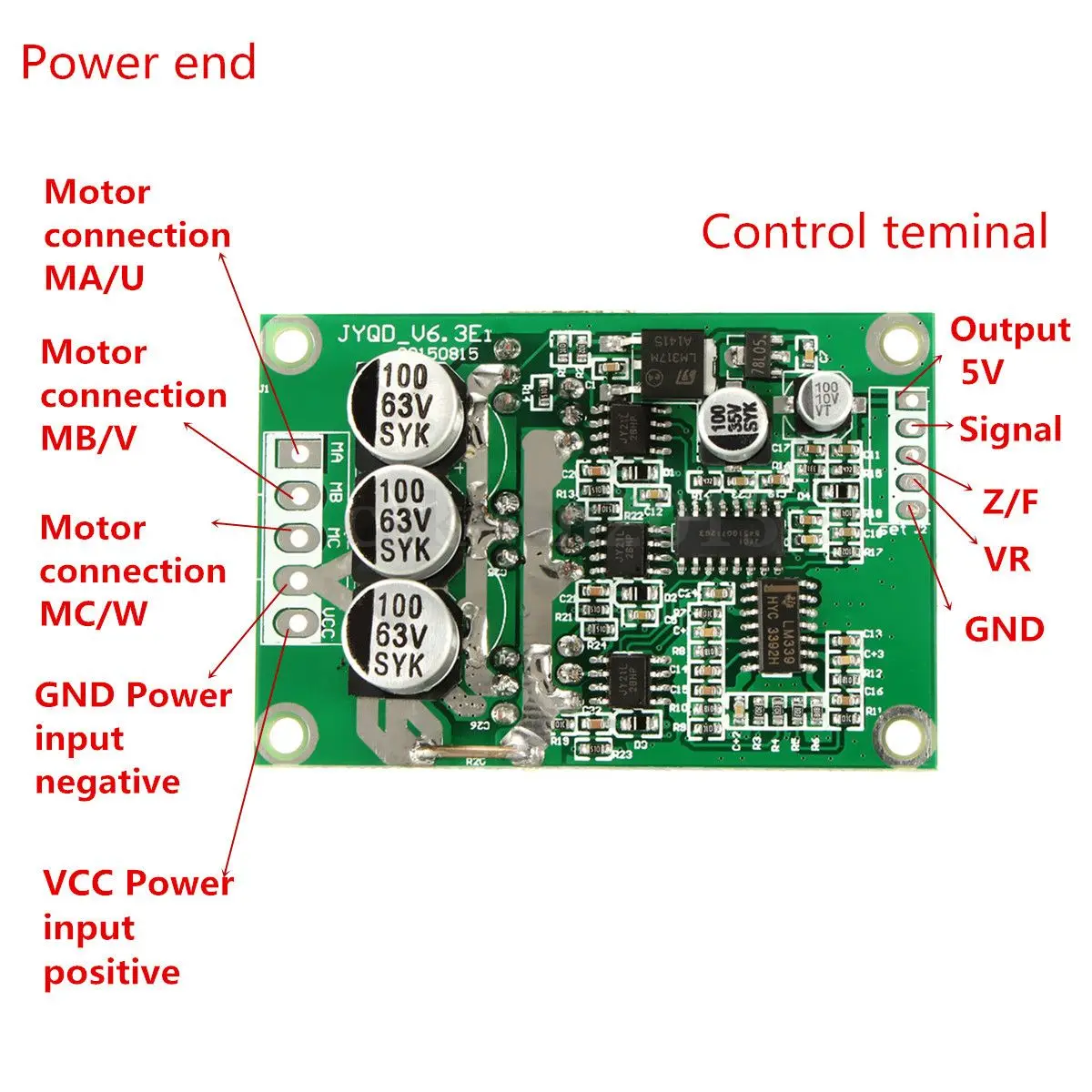 Если энкодер в электроприводе отсутствует, то для таких случаев контроллеры поддерживают режимы бездатчикового управления (sensorless control) и управления по датчикам Холла (sensored control), а также серворежимы direct control, в которых энкодеры могут не требоваться.
Если энкодер в электроприводе отсутствует, то для таких случаев контроллеры поддерживают режимы бездатчикового управления (sensorless control) и управления по датчикам Холла (sensored control), а также серворежимы direct control, в которых энкодеры могут не требоваться.
Если энкодер в приводе присутствует, то контроллеры используют его, когда это имеет смысл. Если энкодер не подключен, то контроллеры могут работать и без него, но, возможно, в упрощенном режиме работы.
Подключение двигателей, датчиков положения вала, датчиков Холла и управляющих шин CANbus и USB 2.0 производится:- либо через штатные разъемы на платах контроллеров,
- либо посредством припайки кабелей в специально предусмотренные отверстия на платах, чем обеспечивается виброустойчивость соединений.
Конструктивно разъемы для подключения кабелей расположены только с одной из сторон плат; тыльная сторона плат не имеет разъемов и предназначена для подключения теплоотводного радиатора или для монтажа платы напрямую на корпус электропривода, использующегося для отвода тепла от платы.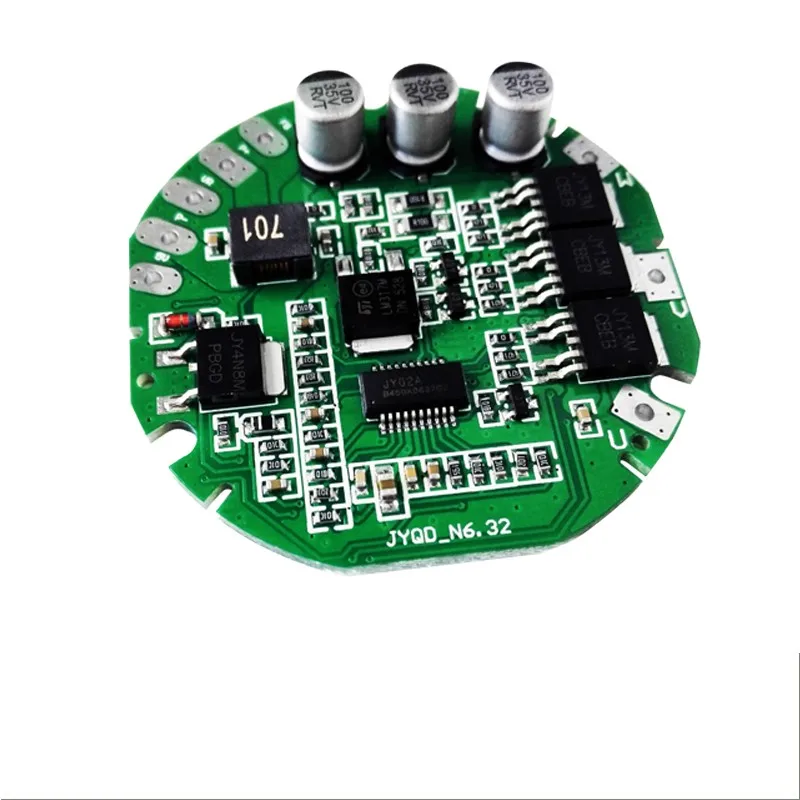
Контроллеры не имеют разъемов, выходящих «в сторону»; все разъемы имеют только ориентацию «вверх». Это сделано для облегчения интеграции контроллеров внутрь корпусов устройств, таких как сервоприводы цилиндрической формы, или в отсеки электрооборудования небольших габаритов.
Предусмотрен механизм для обновления прошивки плат через порт RS232.
Режимы управления
В контроллерах реализованы следующие режимы управления бесколлекторными двигателями:- Стабилизация выходного момента на валу (ETC: Electronic Torque Control). Применяется для точного управления силой, с которой электропривод воздействует на нагрузку, например, в испытательных стендах, АСУ ТП или в шагающих роботах.
- Стабилизация скорости вращения вала (ESC: Electronic Speed Control). Применяется для поддержания заданной скорости вращения двигателя, вне зависимости от меняющейся внешней нагрузки, например, в тяговых электроприводах конвейеров, насосов или в шасси мобильных роботов. Контроллер автоматически увеличивает или уменьшает момент на валу для того, чтоб поддерживать скорость вращения вала постоянной.
- Сервоуправление (Servo Control) — поворот до заданного положения вала и последующее удержание вала с использованием датчика положения вала (энкодера) через редуктор или напрямую. Применяется в робототехнических руках-манипуляторах, АСУ ТП, станках с ЧПУ и любых других устройствах, где необходимо повернуть вал двигателя на заданный угол, а затем поддерживать положение при изменяющейся внешней нагрузке. В зависимости от подключенного энкодера положения вала обеспечивается точность поворота сервопривода до 20 бит.
- Direct Drive — точное управление положением вала посредством прямого позиционирования магнитного поля статора электродвигателя, в том числе при отсутствии редуктора в электроприводе. Применяется в системах компьютерного зрения, станках с ЧПУ, линейных двигателях, — везде где требуется максимальная точность управления положением без редукторов. В этом режиме электропривод на бесколлекторном двигателе может заменить шаговые двигатели при значительном улучшении точности.
- Тормоз вала («блокировка вращения»), — блокировка вращения вала вне зависимости от воздействия внешних нагрузок, например, для фиксации остановленного конвейера или для торможения колес мобильного шасси, стоящего «на горке». Блокировка происходит только работой бесколлекторного двигателя без применения каких-либо дополнительных тормозных устройств. Для блокировки вала применяется метод, минимизируещий потребление электрической энергии.
- Рекуперация энергии в батарею. Если контроллер питается от батареи, то он способен «пропускать» ток обратно в батарею тогда, когда электродвигатель работает в режиме электрогенератора, например, при торможении мобильного шасси. При этом возможно программное управление силой тока, идущего в батарею. Этот режим также применяется в системах «стартер-генератор» в сочетании с двигателями внутреннего сгорания (ДВС), в которых после запуска ДВС электродвигатель переходит в режим электрогенератора.
 Контроллер автоматически увеличивает или уменьшает момент на валу для того, чтоб поддерживать скорость вращения вала постоянной.
Контроллер автоматически увеличивает или уменьшает момент на валу для того, чтоб поддерживать скорость вращения вала постоянной. В этом режиме электропривод на бесколлекторном двигателе может заменить шаговые двигатели при значительном улучшении точности.
В этом режиме электропривод на бесколлекторном двигателе может заменить шаговые двигатели при значительном улучшении точности.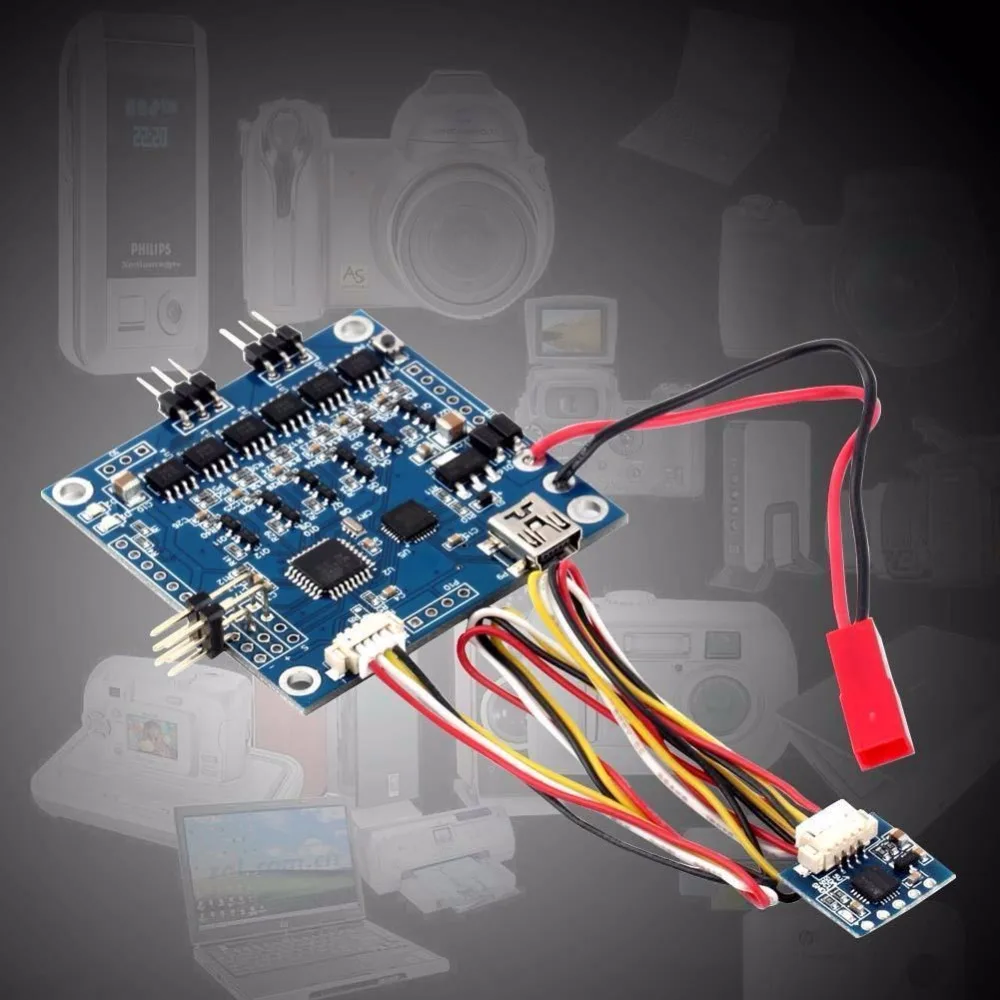
- Field Oriented Control (FOC),
- с Back-EMF Observer и Hall Sensors Observer,,
- с функцией Q-D axis coupling compensation для гладкости хода,
- с опциональным field weakening для достижения максимальных скоростей вращения,
- с интеллектуальными алгоритмами защиты
- и управления динамикой электродвигателя,
- и автоматическим определением характеристик двигателя и привода.
Реализованный набор алгоритмов обеспечивает динамическую устойчивость и малошумность работы электродвигателя, а также достижение максимального момента или максимальной скорости вращения вала (в зависимости от задачи) при оптимизации энергопотребления и обеспечении защиты электродвигателя от перегрева, а редуктора от поломки.
Возможность управлять коллекторными двигателями и соленоидами посредством силовой ШИМ — это вспомогательная функция данных контроллеров, спроектированых прежде всего для управления бесколлекторными двигателями. Для коллекторных двигателей (в отличие от бесколлекторных) реализовано только управление без обратной связи (open loop). При этом при желании можно управлять двумя коллекторными двигателями одновременно (и даже тремя коллекторными двигателями при определенных ограничениях). Также с помощью данных контроллеров можно управлять соленоидами.
Для коллекторных двигателей (в отличие от бесколлекторных) реализовано только управление без обратной связи (open loop). При этом при желании можно управлять двумя коллекторными двигателями одновременно (и даже тремя коллекторными двигателями при определенных ограничениях). Также с помощью данных контроллеров можно управлять соленоидами.
Автонастройка
Для облегчения настройки контроллера под выбранный электродвигатель предусмотрен режим автонастройки, в котором автоматически определяются основные характеристики бесколлекторного электродвигателя и вычисляются оптимальные настройки законов управления. Эта функция значительно упрощает интеграцию контроллера с новыми бесколлекторными двигателями, если даже характеристики двигателя точно не известны по каким-либо причинам («утерян datasheet»).Интерфейсы программного управления
Предусмотрены следующие интерфейсы для интеграции с управляющими компьютерами или бортовыми системами управления:- Шина CAN с протоколом верхнего уровня CANopen. Контроллеры имеют два порта CANbus для облегчения построения «гирлянды» из контроллеров. До 126 контроллеров СЕРВОСИЛА могут быть подключены к единой шине CANbus. Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы.
- Порт USB 2.0, который автоматически инициализируется, как виртуальный COM-порт в Windows 10, 8 и в Linux. Установка специальных драйверов не требуется ни в Windows, ни в Linux. Порт USB 2.0 у контроллеров СЕРВОСИЛА удобен тем, что позволяет управлять электродвигателями с помощью обычных персональных компьютеров или их промышленных вариантов, например, на испытательных стендах или автоматизированных системах контроля качества. Контроллеры СЕРВОСИЛА способны выполнять функцию USB-в-CAN шлюза («переходника USB2CAN») для обеспечения доступа управляющих компьютеров к сети CAN. Этот «переходник» работает как в Windows 10, 8, так и в Linux.
 Контроллеры имеют два порта CANbus для облегчения построения «гирлянды» из контроллеров. До 126 контроллеров СЕРВОСИЛА могут быть подключены к единой шине CANbus. Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы.
Контроллеры имеют два порта CANbus для облегчения построения «гирлянды» из контроллеров. До 126 контроллеров СЕРВОСИЛА могут быть подключены к единой шине CANbus. Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы.
К Windows 10/8/7 контроллеры СЕРВОСИЛА подключаются через интерфейс USB 2.0, который автоматически определяется, как виртуальный COM-порт. Управляющие пользовательские программы, работающие под Windows, могут посылать текстовые команды в контроллер СЕРВОСИЛА через этот виртуальный COM-порт, а также получать обратно телеметрию в текстовом виде. Обмен данными происходит через стандартный текстовый протокол SLCAN.
Подключенный по USB 2.0 контроллер также выполняет роль USB-to-CAN шлюза и позволяет обеспечить доступ управляющих компьютеров с ОС Windows или ОС Linux ко всей сети CANbus. Таким образом, через единый интерфейс USB 2.0 к компьютеру с ОС Windows или Linux можно подключить «гирлянду» контроллеров СЕРВОСИЛА для управления целым комплексом электроприводов, например, в составе испытательного стенда, АСУ ТП или мобильного робота, а также любые другие устройства, поддерживающие шину CANbus, например, инерциальные датчики или GPS приемник.
К ОС Linux контроллеры СЕРВОСИЛА подключаются либо по интерфейсу CAN, либо по интерфейсу USB 2.0. В случае подключения по CANbus управляющие пользовательские программы могут использовать стандартный Linux SocketCAN API для посылки команд в контроллеры СЕРВОСИЛА и для получения телеметрии в обратном направлении. В сети Интернет можно найти примеры исходного кода множества программ, работающих через SocketCAN API.
Если же контроллер СЕРВОСИЛА подключен к Linux через интерфейс USB 2.0 (а не через CANbus), то контроллер идентифицируется в Linux, как виртуальный COM-порт, также, как и в ОС Windows. В этом случае управляющие пользовательские программы могут использовать либо стандартный Linux SocketCAN API через встроенный в Linux драйвер SLCANd, либо же работать с виртуальным COM-портом напрямую с использованием стандартного текстового протокола команд SLCAN.
При подключении через USB 2. 0 к ОС Linux контроллер также может выполнять функцию USB-to-CAN шлюза и обеспечить доступ ОС Linux ко всей сети CANbus. Эта функция полезна в случае, если управляющая компьютерная система с ОС Linux не имеет своего собственного физического CANbus порта. В этом случае контроллеры СЕРВОСИЛА могут играть вспомогательную роль интерфейсного адаптера USB-в-CANbus.
0 к ОС Linux контроллер также может выполнять функцию USB-to-CAN шлюза и обеспечить доступ ОС Linux ко всей сети CANbus. Эта функция полезна в случае, если управляющая компьютерная система с ОС Linux не имеет своего собственного физического CANbus порта. В этом случае контроллеры СЕРВОСИЛА могут играть вспомогательную роль интерфейсного адаптера USB-в-CANbus.
Для разработки программ, управляющих контроллерами СЕРВОСИЛА через CAN или USB 2.0, в общем случае не требуются какие-либо специализированные библиотеки, SDK или средства разработки кроме тех, которые уже имеются в стандартных ОС Linux и Windows. Разрабатывать программы можно на языках C/C++, Java, Python, MATLAB, или любых других, которые могут работать с виртуальными COM-портами, со стандартным SocketCAN API в Linux, или же программных пакетов или ПЛК, которые уже имеют встроенную поддержку CANopen, например, LabView.
Программное обеспечение «Сервоскоп»
В комплект поставки входит программное обеспечение «Сервоскоп», которое автоматизирует процесс настройки контроллеров под конкретный электродвигатель и позволяет строить графики и получать отладочную телеметрию с электроприводов по сети CANbus или USB 2.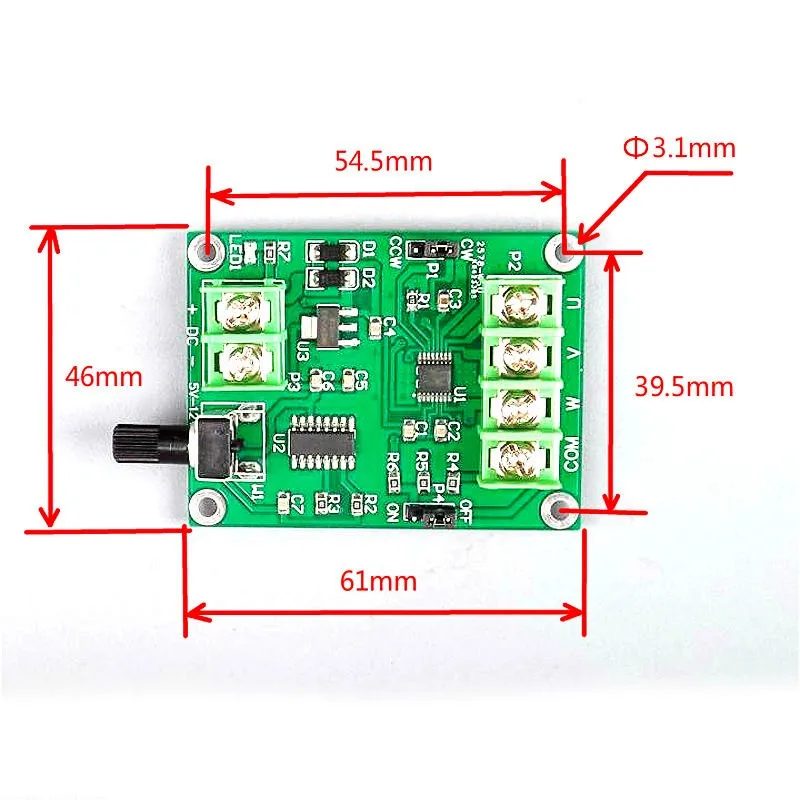 0. Данное графическое программное обеспечение работает как под ОС Windows 10/8, так и под ОС Linux, в том числе, на популярных дистрибутивах Debian и Ubuntu. Установка драйверов не требуется.
0. Данное графическое программное обеспечение работает как под ОС Windows 10/8, так и под ОС Linux, в том числе, на популярных дистрибутивах Debian и Ubuntu. Установка драйверов не требуется.
Симулятор электроприводов
Для упрощения отладки пользовательского управляющего программного обеспечения в комплект поставки входит программный симулятор контроллера СЕРВОСИЛА. Программный симулятор распространяется бесплатно в составе программного обеспечения «Сервоскоп». Этот симулятор полностью воспроизводит управляющий интерфейс CANbus/CANopen контроллеров СЕРВОСИЛА и позволяет отлаживать пользовательское программное обеспечение управления электроприводом без риска повредить реальный электродвигатель или редуктор электропривода.
Технические характеристики
| Параметр | Значение |
|---|---|
| Поддерживаемые типы двигателей | Бесколлекторые (brushless): PMSM, BLDC.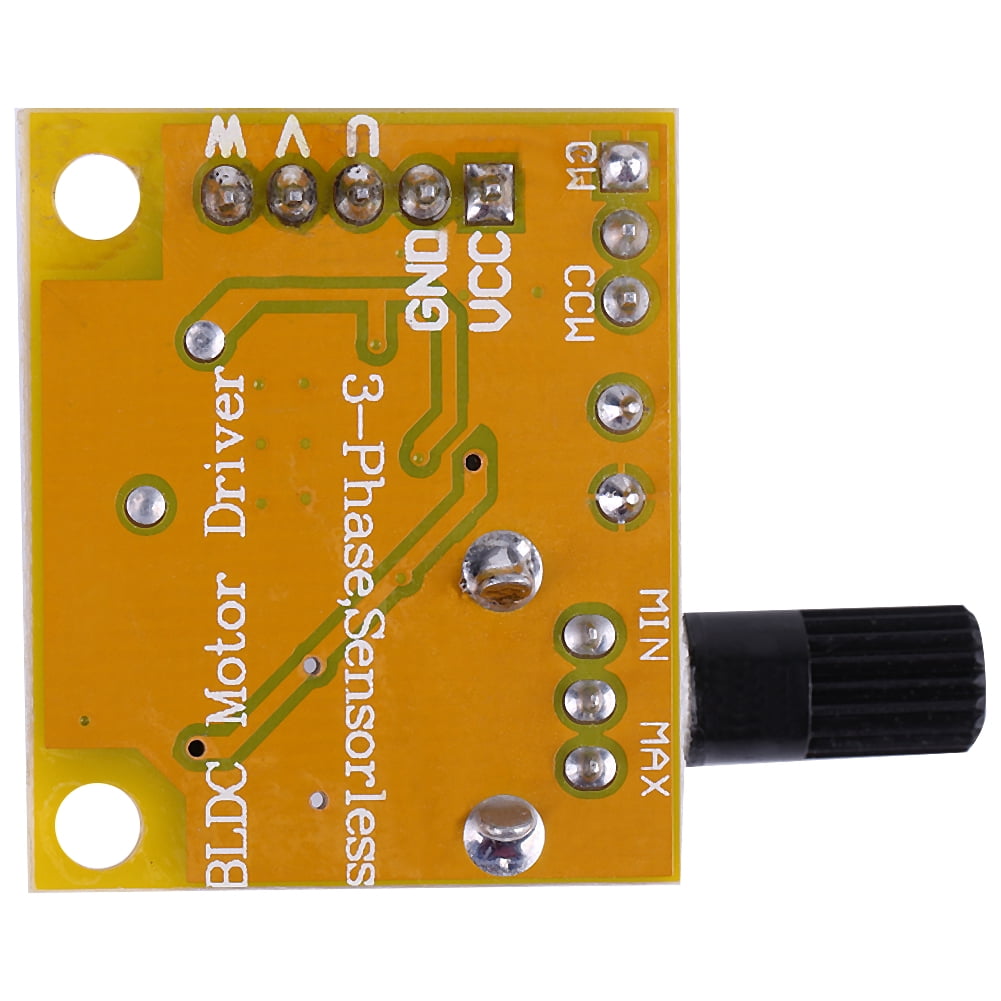 Коллекторные (brushed): только open loop режим. Соленоиды: только open loop режим. |
| Максимальный ток через фазу двигателя | 25 А (желательно с радиатором) |
| Номинальный (рекомендуемый) ток через фазу двигателя | 15 А (желательно с радиатором, но обычно не требуется) 12 А (без радиатора) |
| Входное напряжение питания | 7-60 V DC |
| Режимы управления бесколлекторными двигателями | Стабилизация момента на валу. Стабилизация скорости (ESC). Сервоуправление. Прямое управление (Direct Drive). Тормоз вала. Рекуперация (электрогенератор). Системная идентификция (автонастройка). |
| Встроенные алгоритмы управления бесколлекторными двигателями | Field-Oriented Control (FOC), EMF Observer, Hall Sensors Observer, D-Q axis Coupling Compensation, Field Weakening, Защиты, Управление динамикой разгона-торможения. 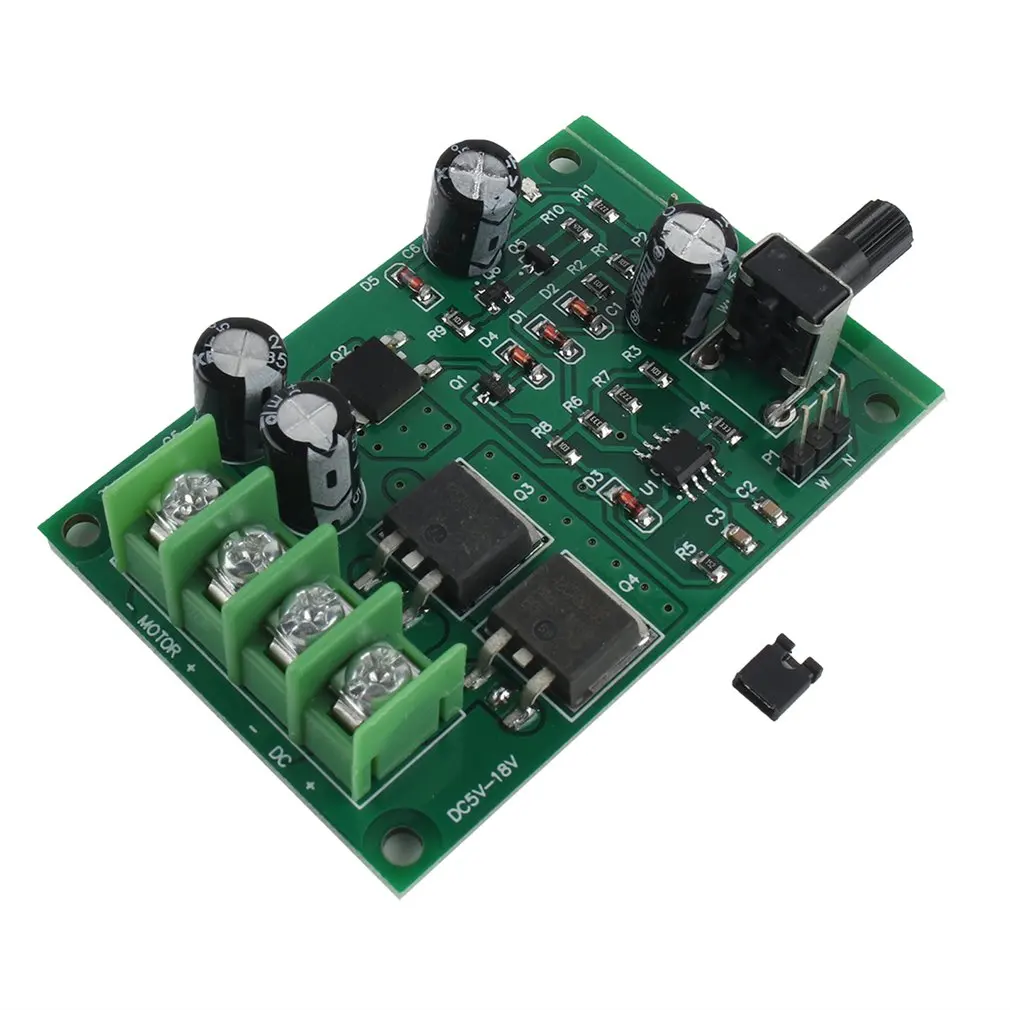 |
| Функция автонастройки под электродвигатель | Есть |
| Интерфейсы к датчикам положения вала (энкодерам) | Квадратурный с индексным сигналом, BISS/C, SSI, ШИМ, SPI |
| Максимальное разрешение датчика положения вала | 20 бит |
| Встроенный шлюз сетей управления | USB-to-CANbus шлюз Поддерживаются 11-битные и 29-битные идентификаторы шины CANbus. |
| Управляющие интерфейсы | Шина CAN: протокол CANopen с 11-битными идентификаторами. USB 2.0: виртуальный COM-порт с текстовым протоколом SLCAN. |
| Количество последовательно подключенных контроллеров («гирлянда») в единой цепочке управления и питания: | До 127 шт через шину CANbus. До 16 шт через встроенный USB-to-CANbus шлюз. |
| Терминальное сопротивление 120 Ом для шины CANbus | Есть. |
| Возможные варианты скорости передачи данных по шине CAN | 1 мбит/сек 500 кбит/сек 250 кбит/сек 125 кбит/сек 100 кбит/сек 50 кбит/сек |
| Количество CANbus портов | 2 шт (параллельные) |
| Количество USB 2.0 портов | 1 шт |
| Поддерживаемые операционные системы | Windows 10, 8 (драйвер не требуется) Linux (драйвер не требуется): Debian, Ubuntu, Astra Linux, Raspberry PI OS и другие. |
| Интерфейсы и API для программного управления | Linux SocketCAN API, CANopen, Текстовый протокол SLCAN через виртуальный COM-порт (USB2.0) для Windows 10, 8 и Linux. |
| Программный симулятор программного интерфейса CANbus контроллера для отладки управляющего программного обеспечения без двигателя | Есть |
| Габариты модели SC-25R (прямоугольной формы) | 68мм x 40мм x 16мм |
| Габариты модели SC-25С (круглой формы) | Диаметр 62 мм, высота 16 мм |
| Масса | ~50 гр (без радиатора) |
| Энергопотребление в режиме ожидания при неработающем двигателе | 120-180 мА |
Как сделать простейший драйвер для двигателя старого HDD
Устройство представляет собой электронный коммутатор и предназначено для работы с маломощными бесколлекторными (иначе бесщеточными) электродвигателями при условии соединения их обмоток звездой. Типичный пример таких агрегатов — привод дисковода классических винчестерских дисков персональных компьютеров.
Типичный пример таких агрегатов — привод дисковода классических винчестерских дисков персональных компьютеров.
Отличается схемной простотой и собирается на недефицитных деталях, которые хорошо представлены в интернет-торговле.
Схемные особенности
Устройство выполнено по схеме 3-фазного мультивибратора на полевых транзисторах с изолированным затвором, отдельные однотранзисторные каскады которого имеют идентичную структуру и соединены в кольцо. Каждый предыдущий каскад такого кольца управляет функционированием транзистора последующего. Стоки транзисторов соединены с обмотками двигателя напрямую.
Время нахождения транзисторов схемы в активном состоянии определяется последовательной RC-цепочкой, напряжение со средней точки которой подается на затвор.
Принципиальная схема устройства представлена на рисунке.
В составе схемы устройства задействованы следующие компоненты:Транзисторы снабжены пластинчатым радиатором, который имеет прямую гальваническую связь со стоком.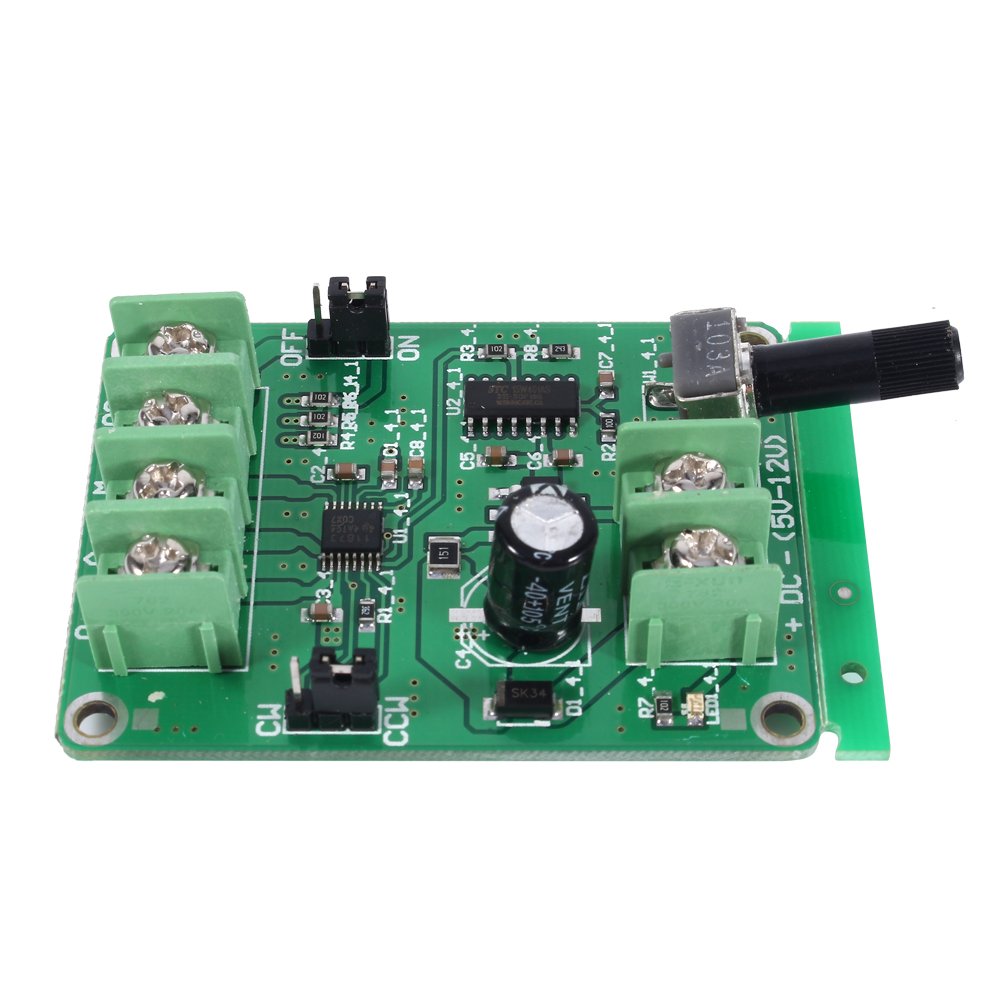 С учетом невысокой мощности управляемого бесколлекторного электродвигателя необходимость фиксации радиатора на корпусе с низким тепловым сопротивлением отсутствует. Цоколевка и рекомендуемое при сборке направление изгиба выводов представлены на рисунке.
С учетом невысокой мощности управляемого бесколлекторного электродвигателя необходимость фиксации радиатора на корпусе с низким тепловым сопротивлением отсутствует. Цоколевка и рекомендуемое при сборке направление изгиба выводов представлены на рисунке.
Изготовление устройства
Схема устройства достаточно проста и не требует обязательного применения монтажной платы. С учетом ее рядной структуры в качестве силового несущего элемента может быть использована проволочная шина диаметром 1 – 2 мм, которая соединяется с плюсом источника питания. Общий вывод обмоток подключается на минус источника питания.
Подключается к трехфазному двигателю жесткого диска с общим проводом.
При сборке необходимо контролировать отсутствие коротких замыканий между отдельными неизолированными соединениями, при необходимости применяют кембрики.
Устройство при отсутствии ошибок в схеме начинает функционировать немедленно после подачи постоянного напряжения. Частоту вращения ротора двигателя можно менять заменой конденсаторов или резисторов, причем все устанавливаемые пассивные компоненты должны иметь одинаковый номинал.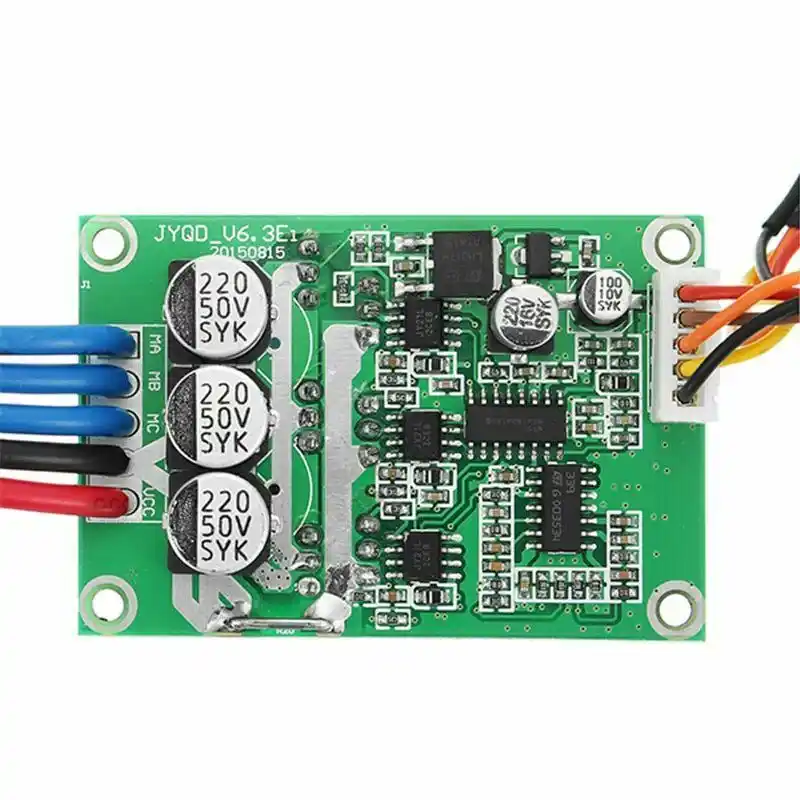
Смотрите видео
Управление бесколлекторным двигателем — схемотехника
Основная задача блока управления бесколлекторным двигателем — переключать обмотки статора в зависимости от положения ротора.
В двигателе постоянного тока эту задачу выполняет коллектор — диск на роторе с контактными площадками, по которому скользят токопроводящие графитовые щетки и переключают обмотки.В асинхронном двигателе знать положение ротора не нужно, но для регулировки скорости нужно менять частоту переключения обмоток (или работать от сети со стандартной частотой 50Гц)
Я начинал изучение схемотехники драйвера бесколлекторного двигателя по апноте Atmel «AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3» Она есть на русском языке.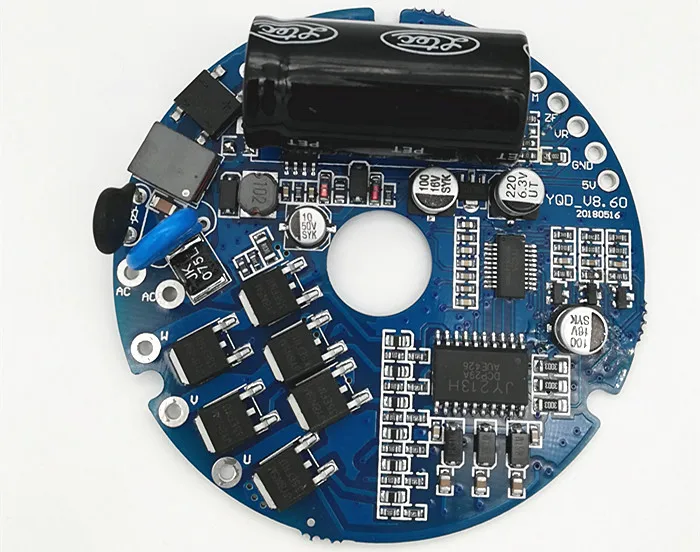 Немного пояснений: «Для управления БКЭПТ используется силовой каскад, состоящих из 3 полумостов. Схема силового каскада показана на рисунке 4.»
Немного пояснений: «Для управления БКЭПТ используется силовой каскад, состоящих из 3 полумостов. Схема силового каскада показана на рисунке 4.»
Здесь силовой каскад — это 6 транзисторов, схематично показанных ключами CmdSW, полумост — пара транзисторов, соединенных последовательно между «+» и «-» питания, например CmdSW1, CmdSW2. A, B, C — выводы обмоток двигателя, соединение обмоток между собой как у асинхронных двигателей. Эта схема позволяет току протекать между фазами A, B, C в любом направлении. Например если замкнуть ключ CmdSW1 и CmdSW4, то ток потечет от вывода A к выводу B, а если замкнуть CmdSW3 и CmdSW2 — от вывода В к выводу A. А если замкнуть CmdSW1 и CmdSW2 — получится короткое замыкание с выгоранием транзисторов, так что управлять транзисторами нужно осторожно. Кстати для управления коллекторым двигателем с реверсом нужно 2 полумоста, без реверса — 1 транзистор.
Для регулирования силы тока в фазе используют широтно-импульсную модуляцию (ШИМ).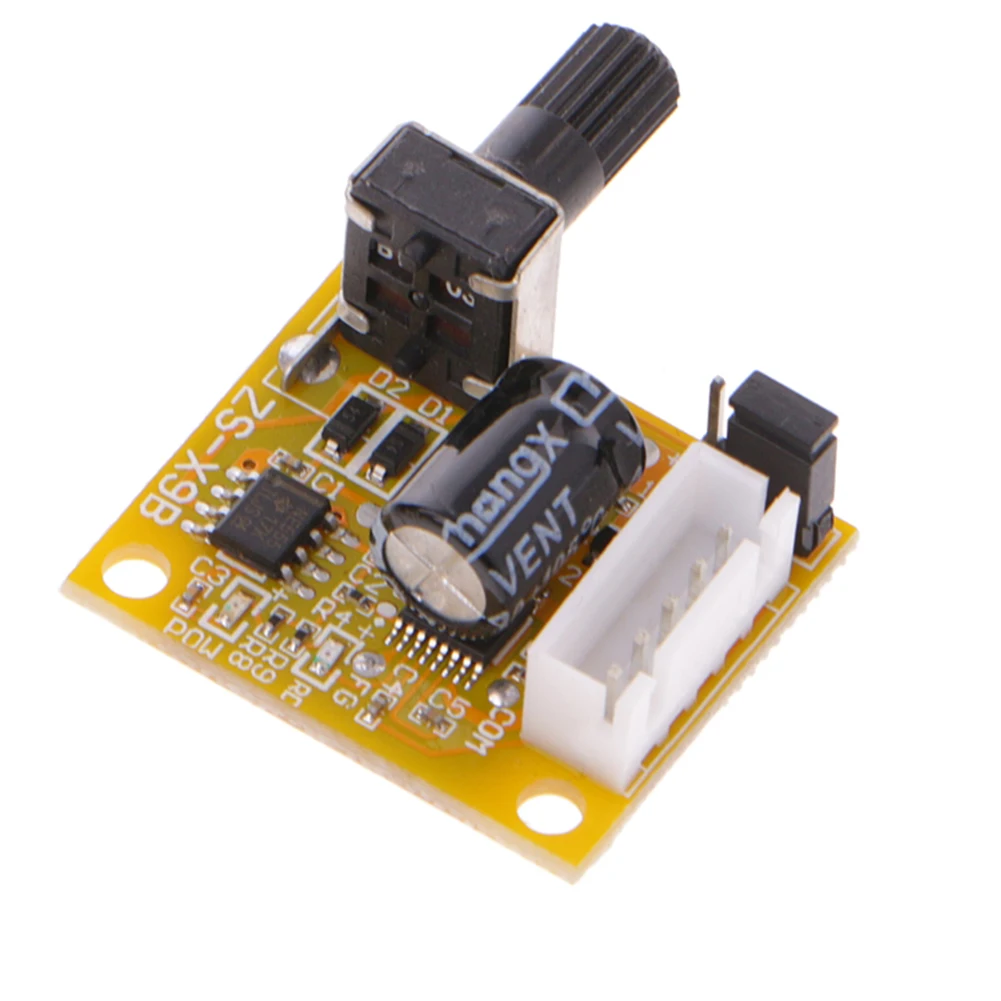 Например часть времени открывают ключи CmdSW1, CmdSW4 и ток начинает течь от «A» к «B», затем закрывают CmdSW1 и открывают CmdSW2 и за счет индуктивности обмоток ток продолжить течь по кольцу A-B-CmdSW4-«земля»-CmdSW2. Кстати в транзисторы встроены диоды, проводящие ток в обратном направлении. Так что если во второй фазе ШИМ разомкнуть все транзисторы, то в обмотке начнет расти напряжение и через эти диоды энергия из обмоток начнет возвращаться в сеть.
Например часть времени открывают ключи CmdSW1, CmdSW4 и ток начинает течь от «A» к «B», затем закрывают CmdSW1 и открывают CmdSW2 и за счет индуктивности обмоток ток продолжить течь по кольцу A-B-CmdSW4-«земля»-CmdSW2. Кстати в транзисторы встроены диоды, проводящие ток в обратном направлении. Так что если во второй фазе ШИМ разомкнуть все транзисторы, то в обмотке начнет расти напряжение и через эти диоды энергия из обмоток начнет возвращаться в сеть.
Эта схема из 6 транзисторов называется трехфазным инвертором и применяется для преобразования постоянного тока в трехфазный переменный для питания как бесколлекторных, так и асинхронных двигателей. Для бесколлекторных двигателей применяются низковольтные полевые транзисторы (MOSFET), для асинхронных двигателей — высоковольтные биполярные транзисторы с изолированным затвором (IGBT). С помощью этой схемы можно осуществлять и рекуперацию. Её используют все и лучше не сделать.
Как инвертор бывает оформлен в зависимости от мощности двигателя:
Для управления двигателями очень маленькой мощности используются специализированные микросхемы, в которой уже находятся 6 транзисторов и логика для управления ими.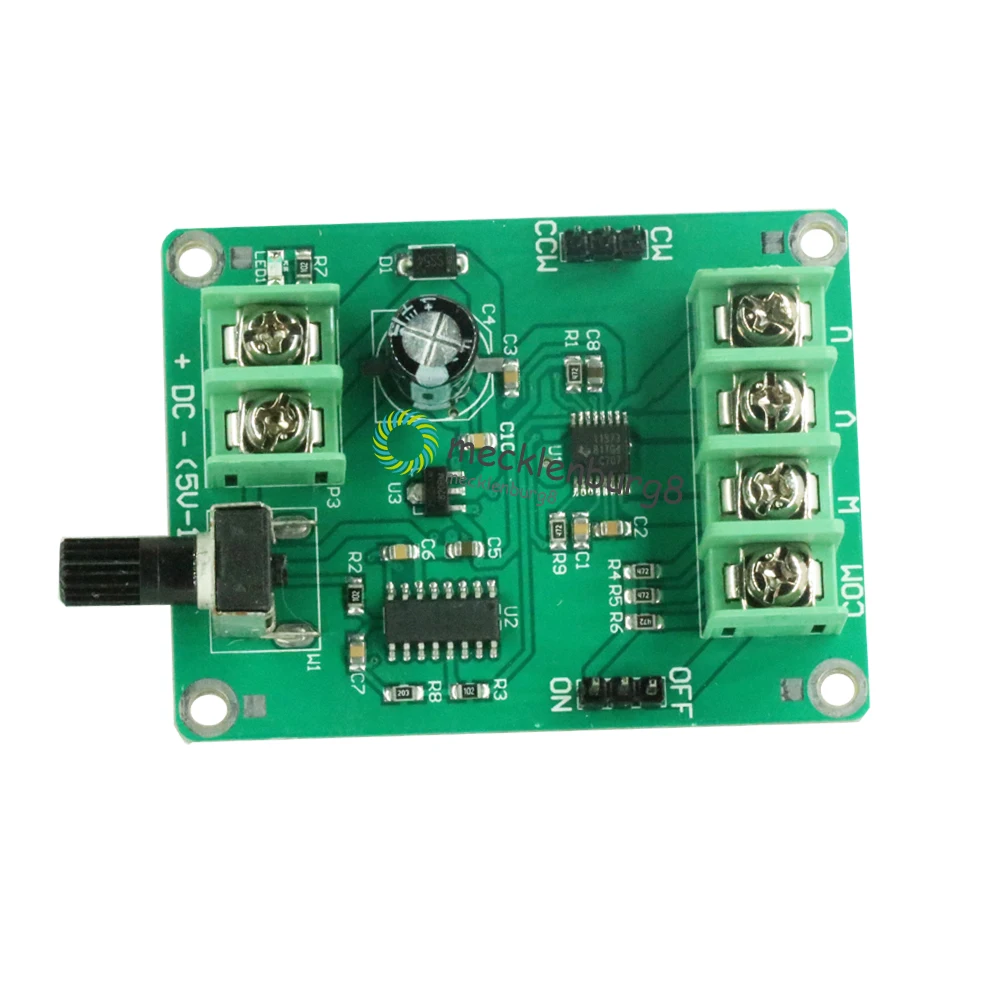 Это решение для двигателей дисководов и вентиляторов. Следующий шаг — микросхема, управляющая транзисторами и транзисторы отдельно. И для высоких мощностей микросхема или контроллер управляет микросхемами драйверов транзисторов, а драйвера уже управляют самими транзисторами. Зачем такие сложности? Мощные транзисторы имеют управляющий вход с большей емкостью, слабая электроника не в состоянии обеспечить токи до нескольких ампер для быстрого их открытия. А у полуоткрытого транзистора большое сопротивление, он в этот момент греется или даже сгорает 🙂 Поэтому используют микросхемы-драйверы, внутри которых кстати тоже транзисторы, только менее мощные. Получается такой каскад из транзисторов.
Это решение для двигателей дисководов и вентиляторов. Следующий шаг — микросхема, управляющая транзисторами и транзисторы отдельно. И для высоких мощностей микросхема или контроллер управляет микросхемами драйверов транзисторов, а драйвера уже управляют самими транзисторами. Зачем такие сложности? Мощные транзисторы имеют управляющий вход с большей емкостью, слабая электроника не в состоянии обеспечить токи до нескольких ампер для быстрого их открытия. А у полуоткрытого транзистора большое сопротивление, он в этот момент греется или даже сгорает 🙂 Поэтому используют микросхемы-драйверы, внутри которых кстати тоже транзисторы, только менее мощные. Получается такой каскад из транзисторов.
Вот первый пример реализации инвертора — авиамодельный, самый дешевый. Фото с двух сторон.
На одной стороне видно 6 транзисторов в корпусах SOIC. (3 N-канальных, 3 P-канальных), на другой стороне микроконтроллер ATMEGA8 и линейный стабилизатор для получения 5В питания. Ещё есть электролитический конденсатор и всякая мелочь — резисторы с конденсаторами.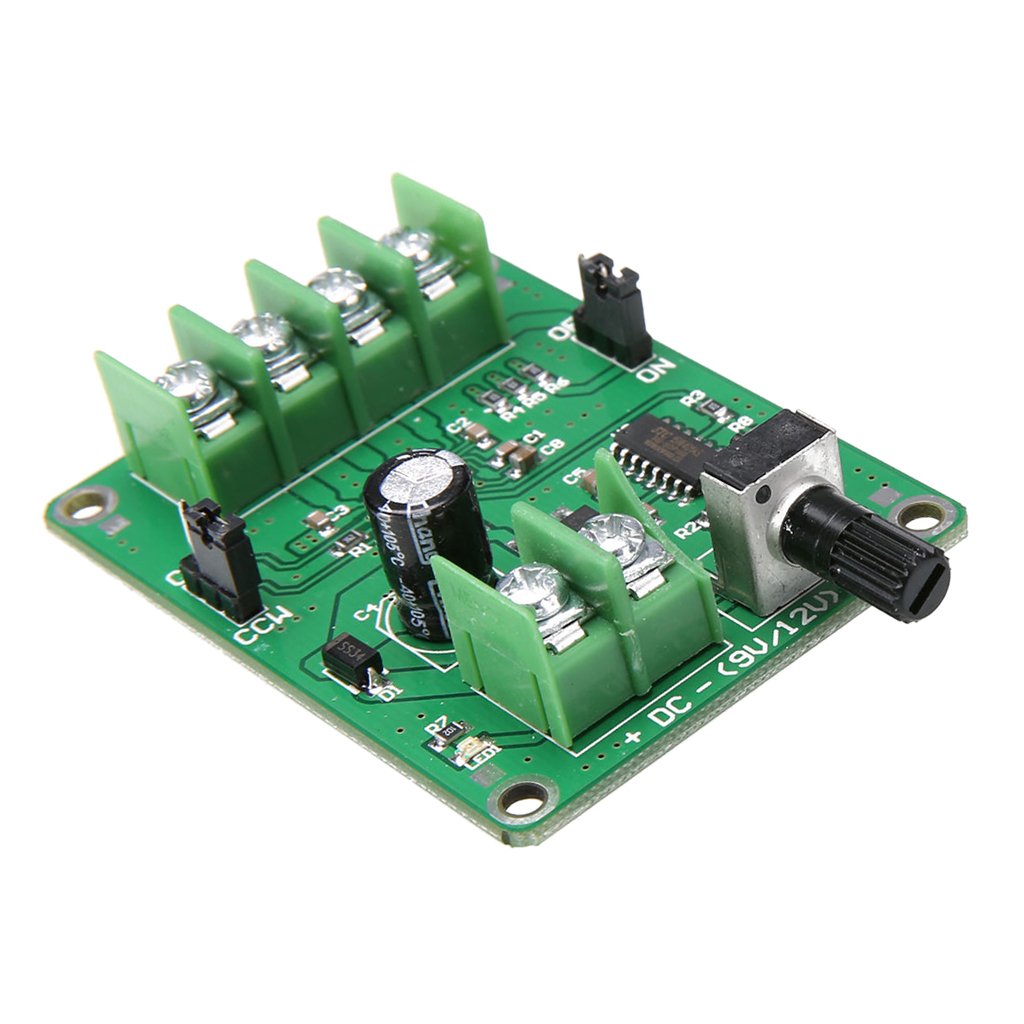 И всё. Дешево и сердито. Цена в рознице около 1000р. Микроконтроллер напрямую управляет затворами транзисторов. Греется такой контроллер довольно сильно, но так как он устанавливается на авиамодели, то хорошо обдувается. Разумеется есть более продвинутые модели, это просто пример упрощения и миниатюризации.
И всё. Дешево и сердито. Цена в рознице около 1000р. Микроконтроллер напрямую управляет затворами транзисторов. Греется такой контроллер довольно сильно, но так как он устанавливается на авиамодели, то хорошо обдувается. Разумеется есть более продвинутые модели, это просто пример упрощения и миниатюризации.
А вот фотография демо-платы от Atmel
Предполагается, что можно купить её и сразу начать программировать контроллер, пытаться крутить двигатель. Я решил не покупать, возможно зря. Во всяком случае к ней неплохо бы продавать сразу запасные транзисторы, я их сжег не один раз. И контроллер пару раз. Собственно 6 транзисторов справа, контроллер слева, драйвера транзисторов на другой стороне.
Схема моего драйвера с пояснениями
Я решил не делать простейший драйвер с тем, чтобы расширить возможности его применения, при необходимости несложно будет упростить. Схема разбита на 3 части. Она не такая наглядная, как в апноте Atmel, но постараюсь всё пояснить.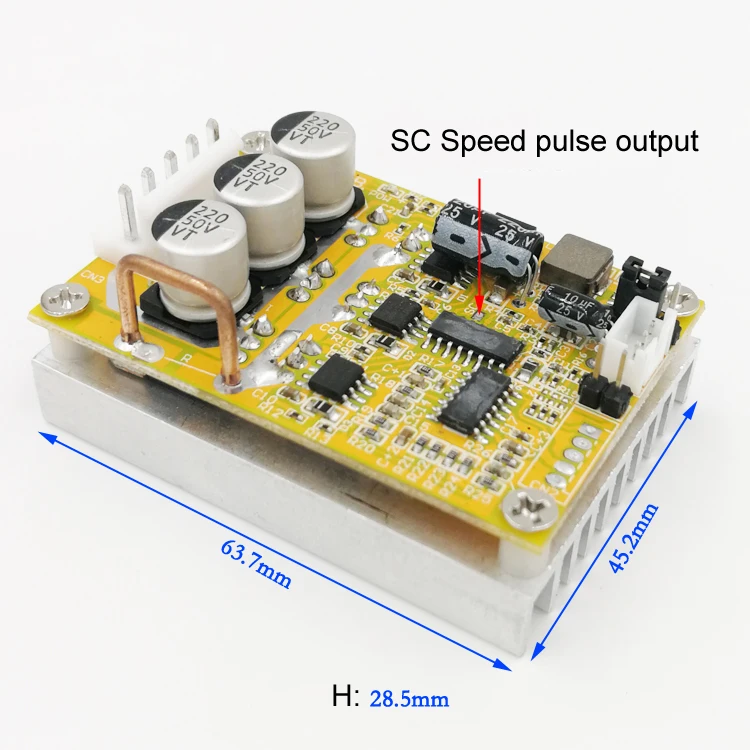
Первая часть — силовая
Силовые транзисторы VT1-VT6 управляются микросхемами-драйверами DA1-DA3. Транзисторы я выбрал IRLR3705 как одни из наиболее мощных в корпусе D-Pak на напряжение 55V с сопротивлением 8мОм. Я рассчитывал на напряжение работы 36В плюс запас. В принципе можно ставить транзисторы на радиаторы и использовать корпуса TO-220, но я решил не усложнять монтаж и паять транзисторы на плату. В таком случае для меньших мощностей можно ставить транзисторы в корпусе soic, а для больших — в D2-Pak. Драйвера взял самые мощные из полумостовых от фирмы International Rectifier — irf2186s с током управления до 4A. Получился большой запас, но самые простые драйвера ir2101 из апнота атмел (ток 130/270мА) с мощными транзисторами справлялись плохо, разница в нагреве транзисторов была ощутима. Полумостовой драйвер управляет двумя транзисторами — верхним и нижним, для управления верхним транзистором нужно высокое напряжение, которое получается по бустрепной схеме питания с помощью диода и конденсатора (например C6, DD7), эта схема наиболее проста и принцип её можно легко найти в интернете.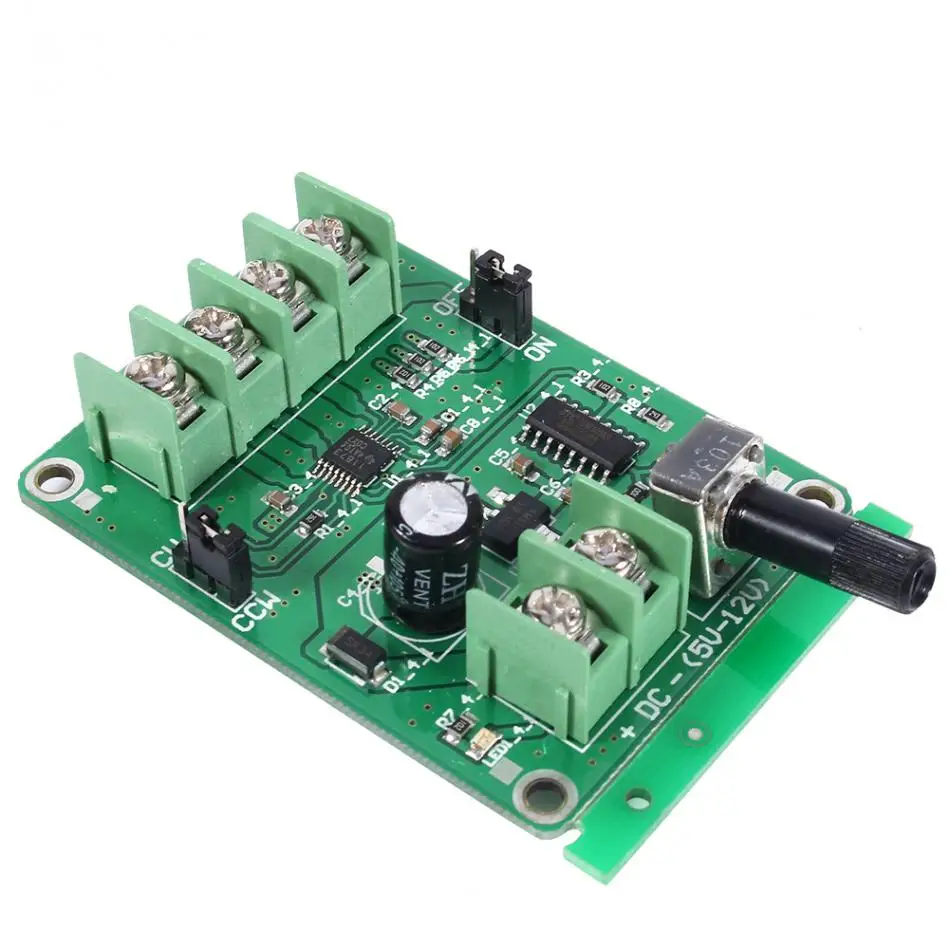 Можно было взять одну микросхему full-brige для управления сразу шестью транзисторами, но у меня разводка с ней получалась хуже. Между затворами транзисторов и драйверами — резисторы с диодом. Они ограничивают ток затвора, причем ток зарядки почти в 2 раза больше. Тут следующая логика — чем больше ток, тем меньше греются транзисторы при переключении, но растут всплески напряжения. Поэтому номинал резисторов нужно уменьшать до какого-либо разумного предела. Причем транзистор открывается медленнее, чем закрывается, поэтому ток зарядки я сделал больше. Сигнальные выводы драйверов подтянуты к земле на всякий случай, чтоб не сработали когда нет сигналов управления. В целом здесь всё почти так же, как в апноте атмел. Датчики холла также подключил как в апноте, здесь ничего интересного. Питание, силовые Выводы транзисторов и выводы датчиков холла выведены на клеммник X1. Для защиты от короткого замыкания нужно контролировать ток. Для этого служат резисторы R19, R21 суммарным сопротивлением 0,005Ом (в апноте был резистор 0,1Ом), падение напряжение на них усиливается микросхемой LM358 и идет на компаратор и АЦП контроллера.
Можно было взять одну микросхему full-brige для управления сразу шестью транзисторами, но у меня разводка с ней получалась хуже. Между затворами транзисторов и драйверами — резисторы с диодом. Они ограничивают ток затвора, причем ток зарядки почти в 2 раза больше. Тут следующая логика — чем больше ток, тем меньше греются транзисторы при переключении, но растут всплески напряжения. Поэтому номинал резисторов нужно уменьшать до какого-либо разумного предела. Причем транзистор открывается медленнее, чем закрывается, поэтому ток зарядки я сделал больше. Сигнальные выводы драйверов подтянуты к земле на всякий случай, чтоб не сработали когда нет сигналов управления. В целом здесь всё почти так же, как в апноте атмел. Датчики холла также подключил как в апноте, здесь ничего интересного. Питание, силовые Выводы транзисторов и выводы датчиков холла выведены на клеммник X1. Для защиты от короткого замыкания нужно контролировать ток. Для этого служат резисторы R19, R21 суммарным сопротивлением 0,005Ом (в апноте был резистор 0,1Ом), падение напряжение на них усиливается микросхемой LM358 и идет на компаратор и АЦП контроллера. Реализация у меня получилась не очень удачной, но в большинстве случаев защита срабатывает. Неплохо было бы ставить переменный резистор, чтобы пользователь мог задавать порого срабатывания защиты, но это как-нибудь потом ). Также в контроллер заведен сигнал V_IN_MEAS, пропорцональный входному напряжению. Сделано это, чтобы не давать работать драйверу при входном напряжении более 36В, но защиту я пока не включил.
Реализация у меня получилась не очень удачной, но в большинстве случаев защита срабатывает. Неплохо было бы ставить переменный резистор, чтобы пользователь мог задавать порого срабатывания защиты, но это как-нибудь потом ). Также в контроллер заведен сигнал V_IN_MEAS, пропорцональный входному напряжению. Сделано это, чтобы не давать работать драйверу при входном напряжении более 36В, но защиту я пока не включил.
Следующая часть схемы — питание логических элементов.
Из входного питания 24..36В нужно получить 12В для питания драйверов транзисторов и 5В для остальной логики
Для получения 12В я использовал линейный стабилизатор MC78M12. Лишнее напряжение он просто рассеивает в виде тепла, но так как драйверы транзисторов поребляют не очень много нагрев приемлемый.
Для 5В питания линейный стабилизатор уже применить не получилось, потому что 5В ещё задумывалось использовать для питания внешнего экрана индикации и нагрев оказался слишком большим. Поэтому применил понижающий преобразователь L5973AD.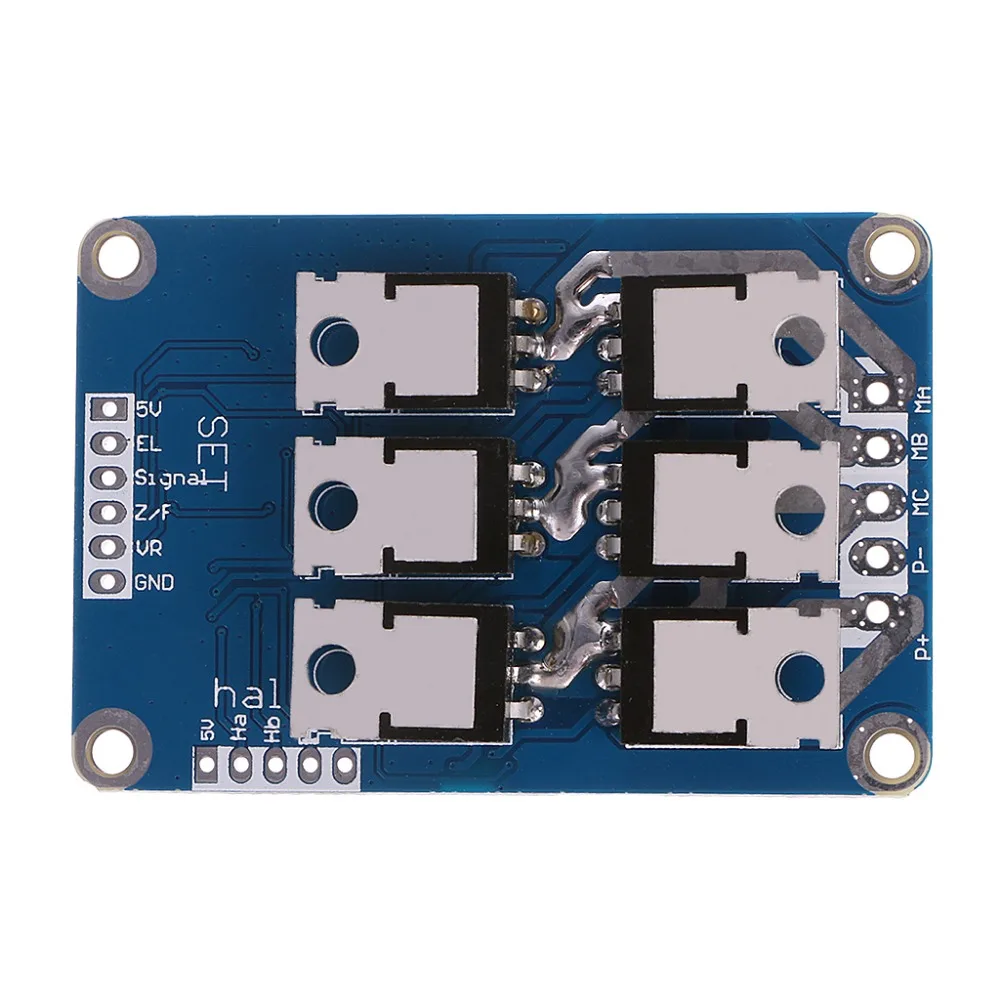 Он не очень дорогой, но в отличии от ещё более дешевых вариантов имеет защиту от короткого замыкания на выходе. Внешняя обвязка для него и разводка дорожек выполнена по соответствующей апноте.
Он не очень дорогой, но в отличии от ещё более дешевых вариантов имеет защиту от короткого замыкания на выходе. Внешняя обвязка для него и разводка дорожек выполнена по соответствующей апноте.
Обе эти микросхемы имеют максимально допустимое напряжение 35В. Для гашения возможного излишнего напряжения предназначена конструкция из транзисторов VT7, VT8 и стабилитрона VD3.
- 6 выводов PSCOUT_XX используются для управления драйверами транзисторов.
- 3 вывода HALL_X используются для отслеживания датчиков холла двигателя.
- 3 вывода задействованы на микропереключатель SA1 — он служит для переключения интерфейсов драйвера (RS485 либо переменный резистор с кнопками), выбора числа пар полюсов подключенного двигателя (2 либо 4) и для проведения калибровки двигателя (определение положения датчиков холла)
- 3 вывода задействованы для управления микросхемой-драйвером RS485
- 6 выводов задействованы под вариант традиционного управления драйвером — с кнопками и переменным резистором. 4 кнопки служат для включения/выключения (Enable), реверса(F/R), тормоза(Brake) и выбора режима поддержания скорости(Mode). Еще один вывод Speed(analog) для переменного резистора задания скорости и на последний выход Hall_out подаются импульсы при срабатывании датчиков холла. Эти выводы и выводы интерфейса RS485 выведены на клеммник X3.
- 2 вывода задействованы для контроля сигнала токового шунта ERROR_ADC. Один для быстрого срабатывания защиты, другой для грубой оценки потребляемого тока.
- 1 вывод для контроля входного напряжения V_IN_MEAS
- 1 вывод для светодиода VD5, полезного для индикации различных событий.
 4 кнопки служат для включения/выключения (Enable), реверса(F/R), тормоза(Brake) и выбора режима поддержания скорости(Mode). Еще один вывод Speed(analog) для переменного резистора задания скорости и на последний выход Hall_out подаются импульсы при срабатывании датчиков холла. Эти выводы и выводы интерфейса RS485 выведены на клеммник X3.
4 кнопки служат для включения/выключения (Enable), реверса(F/R), тормоза(Brake) и выбора режима поддержания скорости(Mode). Еще один вывод Speed(analog) для переменного резистора задания скорости и на последний выход Hall_out подаются импульсы при срабатывании датчиков холла. Эти выводы и выводы интерфейса RS485 выведены на клеммник X3.Представленная схемотехника конечно не соответствует первоначальной идее о максимально дешевом драйвере, но относительно легко может быть упрощена. Можно убрать интерфейс RS485, поставить менее мощные транзисторы и драйверы управления ими.
Контроллер бесколлекторного двигателя BLD-20DIN.

Контроллер BLD‑20DIN – это обновленный блок управления трехфазными бесколлекторными двигателями с датчиками Холла. Номинальный ток двигателя, поддерживаемый блоком – 20А, максимальный до 80А. Это позволяет использовать контроллер с большинством современных и распространенных в промышленности двигателей.
В новом контроллере предусмотрено задание ограничения потребляемой мощности, что обеспечивает защиту оборудования от поломки.
В конструкцию блока включен встроенный тормозной резистор 10 Вт 11 Ом для гашения рекуперативной энергии при длительном торможении и работе с высокоинерционными нагрузками.
Для регулирования скорости бесколлекторного двигателя предусмотрены встроенный потенциометр и контакты
для подключения
внешнего потенциометра или аналогового сигнала 0.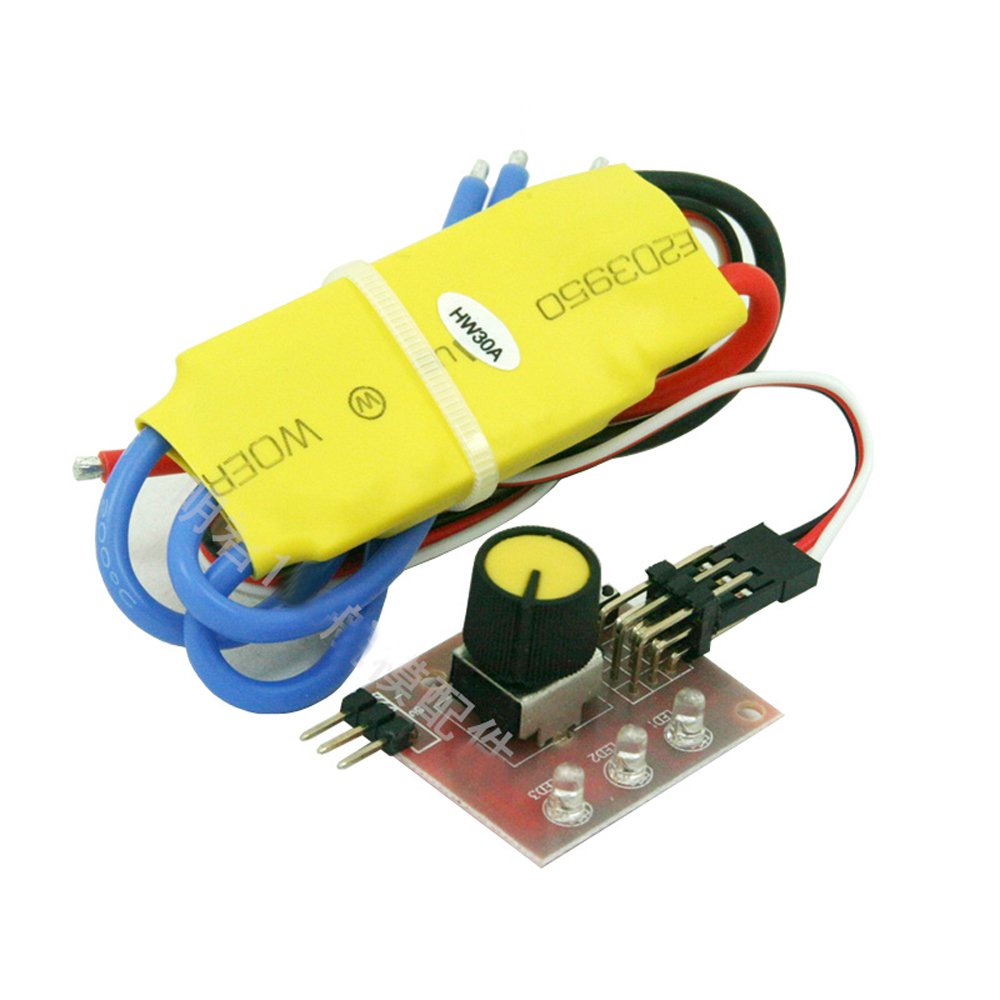 .5 В. Также имеется потенциометр для регулирования
времени разгона и
торможения двигателя.
.5 В. Также имеется потенциометр для регулирования
времени разгона и
торможения двигателя.
Дополнительные сигналы для старта и остановки, смены направления и экстренной остановки (чистый контакт) позволяют подключать внешние кнопки и датчики для управления контролером.
Особенности устройства:
- Плавное ускорение и торможение двигателя задается пользователем при помощи подстроечного резистора.
- Аналоговое регулирование скорости осуществляется встроенным или внешним потенциометром, либо аналоговым сигналом 0..5В.
- Для запуска и остановки двигателя предусмотрена кнопка START/STOP и дублирующий вход для подключения внешнего сигнала.
- Для изменения направления вращения двигателя предназначена кнопка DIR и дублирующий вход для
подключения внешнего
сигнала.
- Предусмотрен вход для подключения внешнего сигнала аварийной остановки.
- Ограничение потребляемой мощности задается пользователем при помощи подстроечного резистора.
- Обработка внешних сигналов START/STOP и DIR может выполняться по уровню или по фронту сигнала. Логика работы выбирается и настраивается пользователем самостоятельно.
- Блок имеет встроенный тормозной резистор (10 Вт, 11 Ом) для поглощения генерируемой двигателем энергии (выбег, принудительное вращение).
Условия эксплуатации блока:
- температура окружающего воздуха – (-25…+50)ºС
- относительная влажность воздуха до 90%
- атмосферное давление (650…800)мм. рт. ст.
Управление скоростью:
- внешний потенциометр
- встроенный потенциометр
- аналоговый сигнал 0. .5В
 .5В
.5ВУправление направлением:
- внешний сигнал DIR
- кнопка реверса
Модули драйверов двигателей
Модуль 16-и канального ШИМ (PWM) контроллера на базе микросхемы PCA9685. Идеально подходит для управления 16 рулевыми машинками (сервоприводами). Интерфейс управления: I2C Напряжение питания модуля: 3-5 В • Питание модуля: 3.3 или 5 В оба напряжения входят в диапазон допустимых; • Питание чипа (VC..
171.99 р.
Технические характеристики
Напряжение питания силовой части (VMOT) : 5 — 35В
Напряжения питания логической части (VDD) : 3-5,5В
Ток максимальный, непрерывный, без дополнительного охлаждения: 1А
Ток максимальный, с дополнительным охлаждением: 2.2A
Дробление шага: 1/2/4/8/16 Описание DRV8825 это мик. .
.
82.80 р.
Выходное напряжение 5 В Выходной ток 5А(max) Входное напряжение 7 – 30В, рекомендуемое до 24В ..
112.98 р.
Технические характеристики Напряжение питания силовой части (VMOT) : 8 — 45В Напряжения питания логической части (VDD) : 3-5,5В Ток максимальный, непрерывный, без дополнительного охлаждения: 1А Ток максимальный, с дополнительным охлаждением: 2.2A Дробление шага: 1/2/4/8/16/32 Описание DRV8825 это м..
141.27 р.
Технические характеристики
напряжение питания: +7…+ 24 В;
количество силовых каналов: 4;
максимально-продолжительный ток каждого канала: 0,6 А;
напряжение питания сервоприводов: 5 В;
возможность реверса каждого двигателя;
возможность независимого управления каждым каналом;
Габариты 53 . .
.
136.64 р.
Драйвер двигателей на базе микросхемы VNh3SP30. Ток до 30Ампер. Напряжение до 16В • Диапазон напряжения питания: 5,5V … 16V (от 5,0 вольт, не работает). • Номинальный\максимальный ток: 14A\30A • Управление логическим уровнем 3,3 вольт • Максимальная частота ШИМ: 20 кГц ..
343.20 р.
Двухканальный драйвер двигателей на базе микросхемы VNh3SP30. Ток до 30Ампер на канал. Напряжение до 16В Позволяет управлять двумя двигателями постоянного тока или одним шаговым двигателем. • Напряжение питания на входе питания моторов Vin: 5,5 … 16 В; • Напряжение логики: 5 В; • Основан на чипе ..
532.00 р.
Питание 12В, 30A. .
.
334.13 р.
Напряжение логики 3 – 5 В (VDD, GND) Напряжение для двигателей 5 – 46В (VMOT, GND) Рабочий выходной ток 1,2 А, до 2 А (с радиатором) Значение микрошага: 1/2, 1/4, 1/8, 1/16; Значение микрошага с интерполяцией: до 1/256; GND и VIO – питание логики; M1B, M1A, M2A, M2B – управление фазами двигателя; ..
409.83 р.
Данный модуль драйвера позволяет эффективно управлять одним шаговым двигателем, часто используется в 3D принтерах и станках ЧПУ. Больше всего привлекает бесшумной работой шагового двигателя, что довольно актуально на 3D принтерах работающих дома, большая надежность, повышенная мощностью до 2А по сра..
305.11 р.
Микросхема: L293D двойной-H мост DC моторов
. .
.
630.48 р.
Контроллер позволяет управлять одним шаговым двигателем или двумя коллекторными двигателями постоянного тока. Для подключения двигателей постоянного тока предусмотрены клеммники — напряжение питания управляемой части (постоянный ток): 5-35В — питание внешней логики (Vss): 5-7В — входное напряжение..
218.13 р.
Микросхема L298N • Управляющая часть пикового тока : 2 a • Диапазон питания: от 4,5 до 5,5 В • Логическая часть рабочего текущего диапазона: 0 ~ 36 мА • Диапазон входного напряжения управления: 4,5 — 5,5 • Максимальная потребляемая мощность: 20 Вт • Температура хранения: 25 град C ~ + 130 C • Разме..
221.27 р.
Микросхема L298N
Напряжение питания: 5В
Напряжение питания моторов: 5-35В
Максимальный ток мотора: 2А (пиковый ток 3 А)
Габариты: 43. 5 мм х 43.2мм х 29.4мм..
5 мм х 43.2мм х 29.4мм..
121.90 р.
Великолепный двухканальный драйвер моторов, который идеально подходит для сопряжения микроконтроллера с двумя маленькими электродвигателями постоянного тока или для управления одним биполярным шаговым мотором. Основанные на MOSFET H-мостах намного более эффективны, чем основанные на BJT H-мостах кот..
288.56 р.
Контроллер шагового двигателя. Микросхема контроллера: TB6560 — ток удержания 25%,50%,100% в процентах от тока номинального драйвера — ток рабочий 25%, 50%, 75%, 100% в процентах от тока номинального драйвера — выбрать шаг двигателя (микрошаг) 1, 1/2, 1/8, 1/16 Максимальный ток: 3А (3,5А в пике..
407.39 р.
Кол-во фаз: 2;
Напряжение питания: 9 — 40 В постоянного тока;
Максимальный выходной ток: 4 А;
Шесть вариантов микрошага.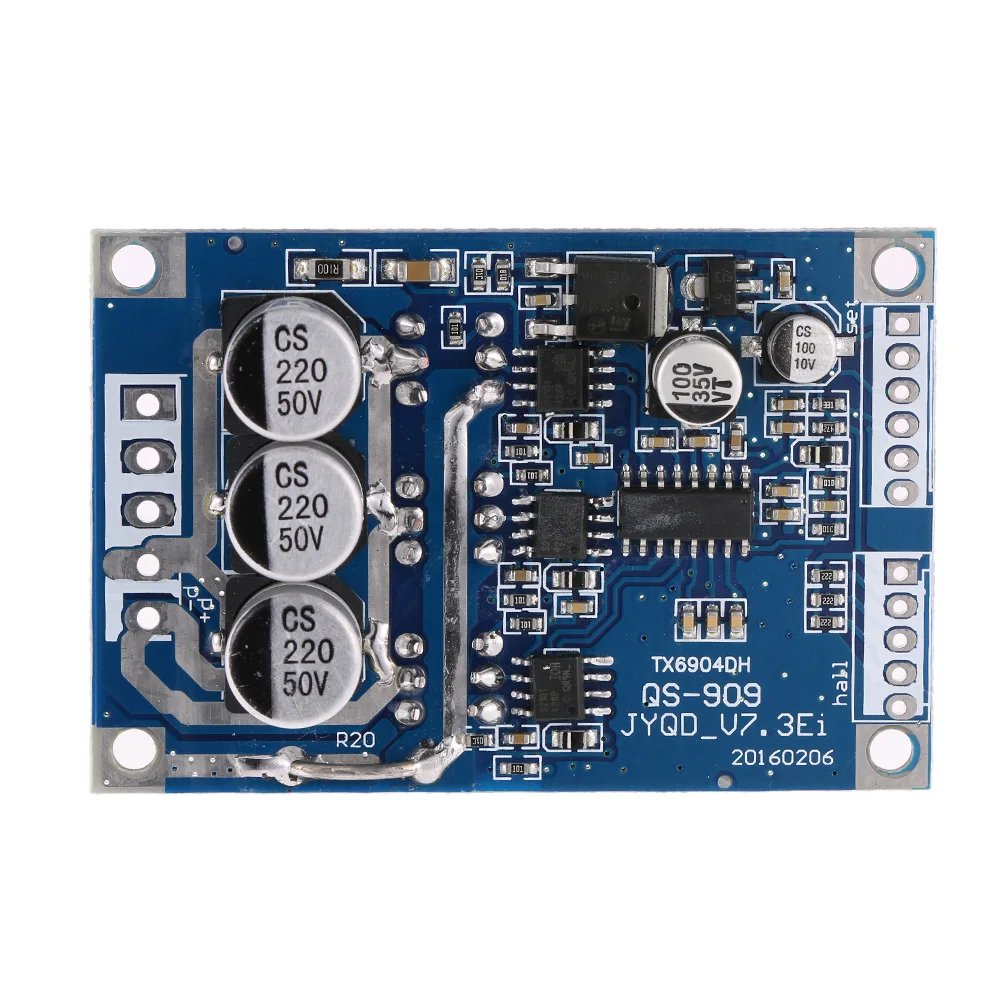 Максимальное деление шага до 6400 шагов/оборот;
Входные сигналы оптоизолтрованы высокоскоростными оптронами;
Выполнен в закрытом корпусе;
Встроенная тепловая защита;
Защита от пер..
Максимальное деление шага до 6400 шагов/оборот;
Входные сигналы оптоизолтрованы высокоскоростными оптронами;
Выполнен в закрытом корпусе;
Встроенная тепловая защита;
Защита от пер..
590.88 р.
Драйвер двигателя L9110S — с его помощью можно контролировать вращение 2-х независимых коллекторных моторов постоянного тока или одного 4-х проводного 2-х фазного шагового двигателя. Характеристики • Входное напряжение: 2.5-12 В; • Допустимый ток на канал: 800 мА; • Максимальный кратковременный ток:..
75.27 р.
Модуль предназначен для управления шаговым двигателем или другой нагрузкой
► Тип шагового двигателя: Униполярный
► Напряжение питания: 5 В, DC
► Количество фазы: 4
► Частота: 100 Гц
► Сопротивление постоянного тока: 50Ω ± 7% (25 ℃)
. .
.
36.83 р.
Модуль ключей ULN2003 для шагового двигателя Характеристики Рабочее напряжение: 5 — 45 В; Максимальный ток нагрузки: 500 мА; Напряжение управляющей логики: 5 В. ..
38.42 р.
Регулируемое напряжение 50 — 220 V (на выходе) Технические характеристики: Максимальная мощность: 2000 Вт Рабочее напряжение: AC 220 V Пластина радиатора размер: 48x35x30 мм ..
121.17 р.
Материал: Алюминий
Диапазон входного напряжения: DC 9V-60V
Номинальный ток: 10А
Максимальный ток: 20А
Размер: 105 x 50 x 33 мм Подходит для двигателя постоянного тока (или нагрузки постоянного тока) в пределах 20А. ..
..
321.31 р.
Рабочее напряжение: 5 В … 30 В, защита от обратного подключения Номинальный ток 2,2: максимальный ток 5А Максимальная мощность 2,3: 150 Вт Рабочая частота: 1 кГц ~ 99 кГц регулируемая, 1 кГц шаг, частота по умолчанию 20 кГц, точность около 1% Рабочий цикл: 0-100%, 1% шаг размер изделия: 79 мм * 4..
370.97 р.
Регулятор хода бесколлекторных двигателей. Оптимизирован для применения в мультикоптерах. Ток до 30А (пиковый ток 40А на 10 секунд) Входное напряжение 2-3s LiPo Вес 25гр..
373.46 р.
Габариты 69 × 53 × 9 mm
Напряжение питания: 3.3 или 5 В
Микросхема: PCA9685
Потребляемый ток: до 10 мА в рабочем режиме
до 15,5 мкА в режиме ожидания
Ток нагрузки на выходах: до 25 мА, при Vcc=5В и схемой с открытым стоком
до 10 мА, при Vcc=5В и схемой с каскадным выходом
Частота тактирования: 25 МГ. .
.
604.39 р.
Управление электродвигателем
Автор: admin3 Июн
Решение «все-в-одном» от компании Infineon для разработки беспроводного электроинструмента
Набор включает в себя транзисторы на основе технологии OptiMOS™ с напряжением сток-исток 40/60 В, схему управления EiceDRIVER™ и микроконтроллер XMC1302 на базе ядра Cortex-M0TM.
Получите преимущества от использования инструментального набора для построения схемы управления электродвигателем мощностью 300 Вт посредством быстрого макетирования и тестирования, а также всесторонней технической поддержки. Завершенное системное решение для беспроводных электроинструментов позволяет разработать оптимизированную по размерам и стоимости схему с максимальной плотностью мощности и высокой энергоэффективностью.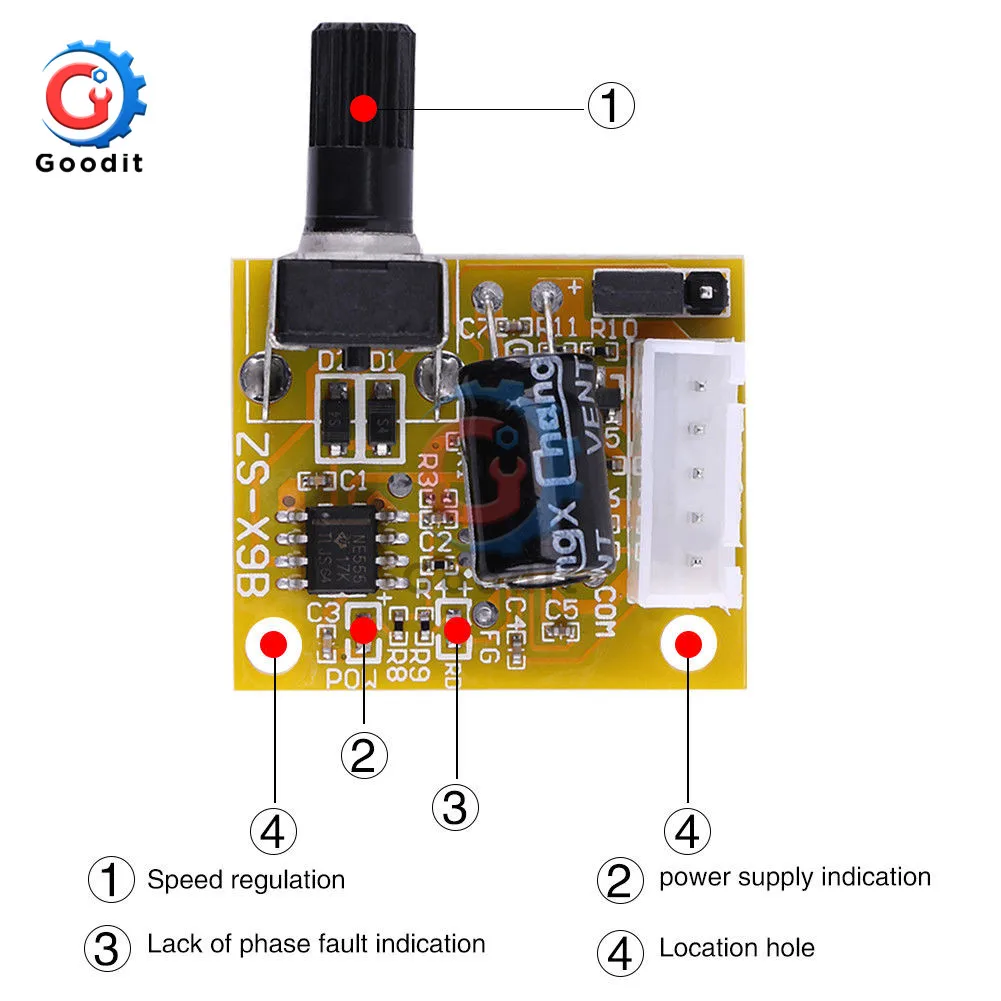 Системное решение компании Infenion на основе собственных MOSFET-транзисторов, драйверов и микроконтроллера позволит разработчикам снизить до 30% стоимости конечного продукта.
Системное решение компании Infenion на основе собственных MOSFET-транзисторов, драйверов и микроконтроллера позволит разработчикам снизить до 30% стоимости конечного продукта.
Читать далее »
- Комментарии отключены
- Рубрика: Infineon
3 Июн
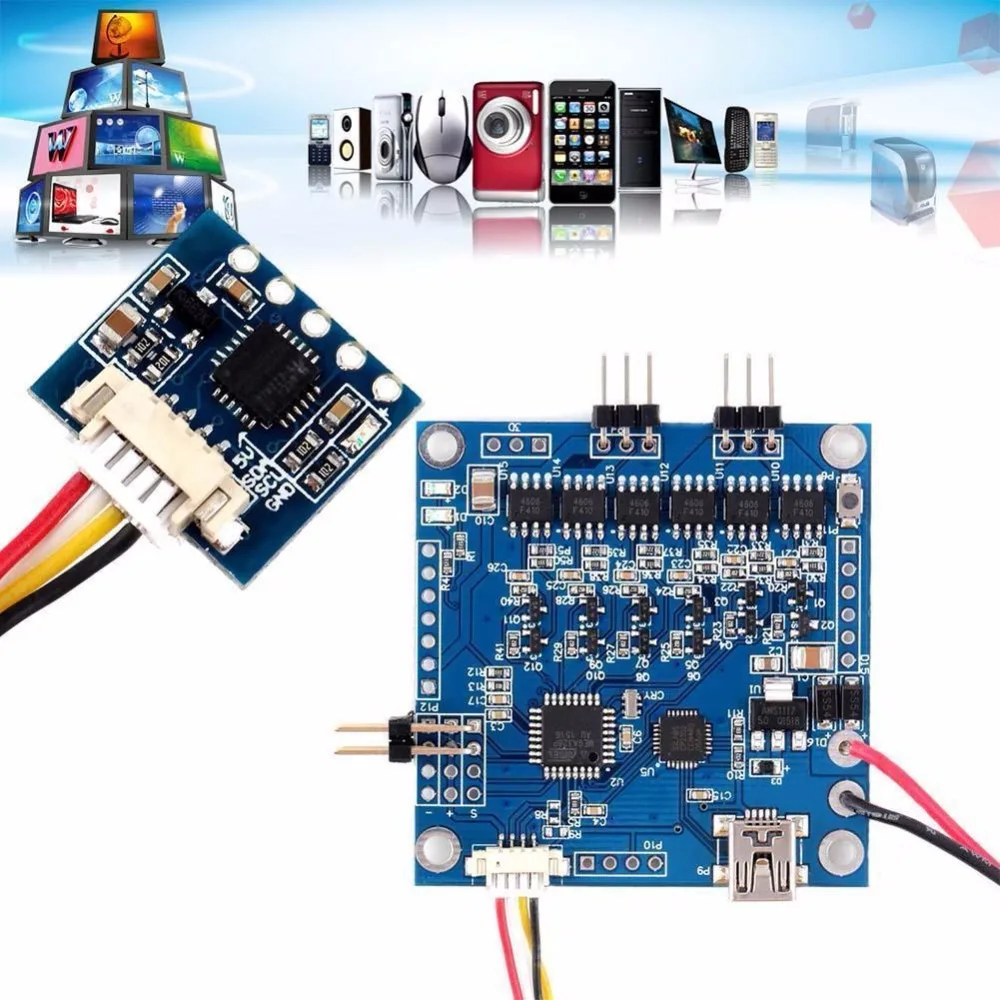
Семейство микроконтроллеров Kinetis KV1x представляют первые приборы в серии устройств Kinetis V, созданных специально для схем управления электродвигателями.
Интеграция самого производительного в отрасли процессора ARM Cortex-M0+, улучшенные АЦП и система тактирования и синхронизации позволяют создавать на основе этих микроконтроллеров мощные конкурентоспособные решения для управления бесколлекторными двигателями постоянного тока (BLDC) и синхронными двигателями с возбуждением от постоянных магнитов (PMSM).
Читать далее »
- Комментарии отключены
- Рубрика: Freescale
3 Апр
Новые микроконтроллеры обработки смешанных сигналов сертифицированы для автомобильных приложений в соответствии со стандартом AEC-Q100 Grade 0 и поддерживают рабочую температуру окружающей среды от -40°C до +150°C.
Хотите отказаться от коллекторных двигателей постоянного тока в пользу бесколлекторных? Вы хотите максимально использовать пространство печатной платы? Вы используете технологию управления ориентацией магнитного поля для построения эффективных схем управления PMSM двигателем с плавным пуском? Хотите воспользоваться готовым программным обеспечением и ускорить разработку конечного решения? Необходимо большей гибкости подключения к сетям LIN или CAN протоколов? И используете MATLAB при модельно-ориентированном проектировании?
Читать далее »
- Комментарии отключены
- Рубрика: Freescale
12 Мар
DRV8303 — это интегральная схема драйвера затворов силовых транзисторов для систем управления трехфазными электродвигателями, отличающаяся сверхнизким энергопотреблением, оснащенная двумя токовыми шунтирующими усилителями и поддерживающая широкий диапазон рабочих напряжений.
DRV8303 оснащен тремя полумостовыми драйверами, каждый из которых способен управлять двумя N-канальными MOSFET-транзисторами (одним верхнего плеча и одним нижнего плеча). Устройство подерживает ток стока до 2.3 А, ток истока до 1.7 А и способно работать от однополярного источника питания в широком диапазоне напряжений от 6 В до 60В. Для питания прибор необходим однополярный источник с диапазоном напряжения от 6 В до 60 В. В DRV8303 используется схема управления затворами с компенсационной обратной связью и частичной подзарядкой, что позволяет задействовать 100% рабочий цикл. Помимо этого, для предотвращения сквозного тока через силовые транзисторы полумоста предусмотрен механизм автоматического контроля момента переключения каждого из них.
Читать далее »
3 Апр
STK681-300 – это толстопленочная гибридная микросхема реверсивного драйвера коллекторного электродвигателя.
Устройство предназначено для управления коллекторным электродвигателем постоянного тока и обеспечивает четыре режима работы: вперед, назад, торможение и стоп. Допустимый рабочий выходной ток составляет 2.9 А, допустимый пиковый входной ток при торможении двигателя (режим «торможение») составляет 5 А. STK681-300 интегрирует резистор датчика тока электродвигателя, позволяя уменьшить размер готового решения и снизить его стоимость за счет уменьшения количества внешних компонентов. Кроме того, интегрированный датчик тока избавляет разработчика от необходимости рассчитывать мертвое время между моментами закрытия и открытия интегрированных силовых ключей верхнего и нижнего плеча при изменении направления вращения двигателя.
Читать далее »
3 Апр
Микросхема LV8761V компании ON Semiconductor представляет собой полный Н–мостовой драйвер коллекторного электродвигателя постоянного тока, реализующий четыре режима работы: вперед, назад, стоп и режим ожидания.
Малое сопротивление интегрированных силовых ключей в открытом состоянии, нулевой ток покоя в режиме ожидания и высокая энергоэффективность делают данное устройство идеальным для применения в системах управления коллекторными двигателями постоянного тока в офисном оборудовании.
Читать далее »
27 Фев
Микросхема LV8804FV компании ON Semiconductor предназначена для управления бесколлекторными двигателями постоянного тока в вентиляторах персональных компьютеров, серверов и холодильников.
LV8804FV представляет собой бездатчиковый драйвер трехфазного электродвигателя, обеспечивающий малое энергопотребление и низкий уровень вибрации. Отсутствие необходимости применения датчика Холла позволяет уменьшить размер готового решения. Драйвер LV8804FV ориентирован на применение в приложениях, требующих высокой надежности при длительном сроке эксплуатации, таких как вентиляторы серверов и холодильников.
Читать далее »
27 Фев
Гибридные микросхемы семейства STK672 компании ON Semiconductor представляют собой микрошаговые драйверы униполярного двухфазного шагового двигателя, оснащенные интегрированными силовыми ключами на MOSFET транзисторах.
Архитектура устройств базируется на униполярном ШИМ–контроллере со стабилизацией тока нагрузки и включает интегрированный контроллер микрошагов, обеспечивая широкий выбор режимов возбуждения: 2-фазный, 1-2-фазный, W1-2-фазный, 2W1-2-фазный и 4W1-2–фазный. Кроме того, устройства обеспечивают вращение ротора двигателя в прямом и обратном направлении с функцией деления шагов с разрешением до 1:16, позволяя регулировать скорость вращения простым изменением частоты тактового сигнала. Применение микросхем семейства STK672 позволяет разработчикам проектировать решения, обеспечивающие высокий крутящий момент двигателя, низкий уровень вибрации, быстрый отклик и высокий КПД приложения.
Читать далее »
24 Янв
Пиковый ток до 5 А, деление шагов до 1:16
Компания Toshiba Electronics расширила свое семейство микрошаговых контроллеров шаговых двигателей новым устройством — TB6600HG, отличающимся пиковым выходным током до 5 А и возможностью выбора разрешения микрошагов.
Высокая степень интеграции функциональных узлов обеспечивает возможность сокращения количества компонентов при применении TB6600HG в оргтехнике, промышленных системах и других приложениях, требующих точности и повторяемости позиционирования ротора двигателя, а также длительной эксплуатации без технического обслуживания.
Читать далее »
- Комментарии отключены
- Рубрика: Toshiba
24 Янв
Идеально подходит для применения в устройствах с питанием от аккумуляторной батареи
DRV8837 представляет собой высокоинтегрированный драйвер маломощного коллекторного электродвигателя, ориентированный на применение в камерах, потребительских товарах, игрушках и других устройствах с низковольтным питанием или с питанием от аккумуляторной батареи, осуществляющих управление механическим перемещением исполнительных элементов.
Драйвер оснащен одним H-мостовым выходным каскадом и предназначен для управления одним коллекторным электродвигателем постоянного тока или одной обмоткой шагового двигателя, а также другими устройствами, такими как соленоиды. Выходные каскады драйвера управления обмоткой двигателя построены на N-канальных силовых MOSFET транзисторах, сконфигурированных как полный Н–мост. Интегрированная схема подкачки заряда (charge pump) обеспечивает необходимое напряжение для управления затворами MOSFET транзисторов.
Читать далее »
Серия продуктов | Бесщеточные двигатели постоянного тока серии BLE2 (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BMU (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BX II (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BLE (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BLH (вход постоянного тока) | Бесщеточные двигатели постоянного тока типа R серии BLV (вход постоянного тока) | Бесщеточные двигатели постоянного тока серии BLV (вход постоянного тока) |
Характеристики | Расширенная производительность Контроль крутящего момента Цифровой дисплей 4 метода настройки скорости | Простота использования Простая установка и подключение Цифровой дисплей | Высокая производительность Контроль скорости, позиционирования и ограничения крутящего момента Способы установки нескольких скоростей | Стандартные драйверы или драйверы типа связи RS-485 Функция ограничения крутящего момента | Драйвер компактного типа для платы Ограничение крутящего момента | На батарейках Компактный драйвер (Modbus RTU, CANopen) Драйвер | Сетевые коммуникации (ввод / вывод или RS-485) Ограничение крутящего момента |
Выходная мощность | 30 Вт (1/25 л.с.) | 30 Вт (1/25 л.с.) | 30 Вт (1/25 л.с.) | 30 Вт (1/25 л.с.) | 15 Вт (1/50 л.с.) | 100 Вт (1/8 л.с.) | 100 Вт (1/8 л.с.) |
Блок питания | Однофазный 100-120 В переменного тока | Однофазный 100-120 В переменного тока | Однофазный 100-120 В переменного тока | Однофазный 100–120 В переменного тока | 24 В постоянного тока | 24 В постоянного тока | 24 В постоянного тока |
Типы шестерен | Вал параллельный h2 Пищевой Параллельный вал (на лапах) Параллельный вал (вал из нержавеющей стали IP66) Угловой полый вал (вал из нержавеющей стали IP66) Плоская шестерня с полым валом Круглый вал (без шестерни) | Вал параллельный h2 Пищевой Параллельный вал (на лапах) Параллельный вал (вал из нержавеющей стали IP66) Угловой полый вал (вал из нержавеющей стали IP66) Плоская шестерня с полым валом Круглый вал (без шестерни) | Вал параллельный Плоский полый вал Круглый вал (без шестерни) | Вал параллельный Плоский полый вал Круглый вал (без шестерни) | Вал параллельный Плоский полый вал Круглый вал (без шестерни) | Вал параллельный Плоский полый вал Круглый вал (без шестерни) | Вал параллельный Плоский полый вал Круглый вал (без шестерни) |
Доступные опции | Электромагнитный тормоз Типы IP66 и IP67 | Типы IP66 и IP67 | Электромагнитный тормоз | Электромагнитный тормоз IP65 Тип | Электромагнитный тормоз | Электромагнитный тормоз | Электромагнитный тормоз |
Настройка крутящего момента | Есть | – | Есть | Да | Да † | Есть | Да |
Мониторинг | Есть | – | Есть | Да | Да † | Есть | Да |
Количество настроек скорости | 16 настроек | 4 настройки | 16 настроек | 16 настроек | 2 настройки 8 настроек | 8 (с прямым / дискретным) 256 (с удаленными входами) | 2 настройки 8 настроек * (с модулем управления или вспомогательным программным обеспечением) |
Диапазон регулирования скорости | 80 ~ 4000 об / мин | 80 ~ 4000 об / мин | 2 ~ 4000 об / мин | 100 ~ 4000 об / мин 80 ~ 4000 об / мин | 100 ~ 3000 об / мин | 1 ~ 4000 об / мин | 100 ~ 4000 об / мин |
Номинальный крутящий момент | 0.От 85 до 5159 фунт-дюймов | от 0,85 до 5159 фунт-дюймов | от 0,89 до 970 фунт-дюймов | от 0,85 до 600 фунтов на дюйм | от 0,44 до 600 фунтов на дюйм | 0 ~ 470 фунтов на дюйм | от 5,75 до 970 фунтов на дюйм |
Узнать больше | Бесщеточные двигатели постоянного тока серии BLE2 (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BMU (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BX II (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BLE (вход переменного тока) | Бесщеточные двигатели постоянного тока серии BLH (вход постоянного тока) | Бесщеточные двигатели постоянного тока типа R серии BLV (вход постоянного тока) | Бесщеточные двигатели постоянного тока серии BLV (вход постоянного тока) |
Различные типы контроллеров бесщеточного двигателя
Бесщеточный ESC —
Контроллер бесщеточного двигателя —
Там, где бесщеточный ESC обычно преобразует входящее напряжение в правильную схему привода для бесщеточного двигателя, контроллер бесщеточного двигателя может быть намного лучше оптимизирован для обеспечения ряда преимуществ в производительности, включая управление с обратной связью с использованием обратной ЭДС для обеспечения постоянной скорости при переменной нагрузке. Важно отметить, что контроллер бесщеточного двигателя может быть разработан специально для бесщеточного двигателя постоянного тока с датчиком (в отличие от бесщеточного двигателя без датчика). Всегда помните, что контроллер бесщеточного двигателя без датчика может управлять бесщеточным двигателем с датчиком или без датчика, но контроллер двигателя без датчика может управлять только бесщеточным двигателем с датчиком.
S Контроллер бесщеточного двигателя без датчика —
Драйвер двигателя BLDC —
— KBL1660, одноканальный, средней мощности, 120 А, от SDP / SI
Номер детали: NR4-KBL1660
- Описание:
- Бесщеточный контроллер двигателя постоянного тока
- IP65 пыленепроницаемость водонепроницаемость
- Одноканальный
- 1 x 120A
- 60 В
- USB
- CANbus
- Трапецеидальная / синусоидальная
- FOC
- 8 Dig / Ана IO
- Охлаждающая пластина с крышкой из АБС-пластика
Тип двигателя:
Бесщеточный DCМощность:
Максимальное напряжение: 60
Количество каналов: 1
Максимальный ток на канал: 120
Постоянный ток на канал: 100
Разъемы питания: Винтовые клеммы
Полевое управление (FOC): Да
Коммутация
Трапецеидальная: ДаСинусоидальная: Да
Связь
RS232: ДаRS485: Да
USB: Да
CANbus: Да
Ethernet: Нет
Датчик ротора
Энкодер: ДаХолл: Да
Sin / Cos: Да
SSI: Да
SPI: Нет
Резольвер: Да
Входы / Выходы
Максимальное количество аналоговых входов: 6Максимальное количество цифровых входов: 6
Максимальное количество цифровых выходов: 2
Максимальное количество импульсных входов: 6
Функциональная безопасность
Safe Torque Off (STO): НетМеханический
Охлаждение: Проводящая пластинаРазмеры: 140 мм x 113 мм x 20 мм
Вес: 380 г
Драйвер бесщеточного двигателя постоянного тока | Двигатель BLDC
Растет использование бесщеточных двигателей постоянного тока (BLDC).Но для их управления обычно требуется информация о положении ротора для выбора подходящего угла коммутации. Обычно датчик Холла используется для определения положения ротора. Но в приложениях, чувствительных к стоимости, часто желательна схема коммутации без датчиков. Схема драйвера бесщеточного двигателя постоянного тока, описанная здесь, использует микросхему драйвера DRV10866 для управления небольшим вентилятором BLDC без использования каких-либо датчиков положения. Скорость вентилятора BLDC можно плавно изменять без обычных шагов, связанных с обычным вентилятором переменного тока.
Схема привода бесщеточного двигателя постоянного тока
На рис. 1 показана схема бездатчикового драйвера двигателя BLDC. Схема построена на NE555 (IC1), DRV10866 (IC2) и нескольких других компонентах.
Рис. 1: Схема драйвера бесщеточного двигателя постоянного токаДрайвер DRV10866 IC от Texas Instruments используется для привода небольшого трехфазного двигателя BLDC (M1). Схема представляет собой трехфазный драйвер двигателя без датчика со встроенными силовыми полевыми МОП-транзисторами, обеспечивающими максимальный ток возбуждения до 680 мА.DRV10866 специально разработан для приводов с низким уровнем шума и малым количеством компонентов. Схема без датчика обратной ЭДС 150 ° используется для управления трехфазным двигателем.
Подтягивающий резистор 100 кОм (R2) используется на выводе 1 IC2. Контакты 2, 4, 7 и 6 IC2 подключены к общей фазе A, фазе B и фазе C двигателя BLDC соответственно. Контакт 10 IC2 подключен к контакту 7 IC1 для получения сигнала с широтно-импульсной модуляцией (PWM) от IC1 для управления скоростью двигателя BLDC.
Выходной сигнал (ШИМ) доступен на выводе 7 (DIS) микросхемы IC1, а не на обычном выводе 3 микросхемы.Рабочий цикл сигнала ШИМ 25 кГц (приблизительно) можно регулировать от 5% до 95% с помощью потенциометра VR1. Скорость двигателя BLDC можно контролировать, изменяя рабочий цикл сигнала PWM. Поворот VR1 против часовой стрелки снижает рабочий цикл, что, в свою очередь, снижает скорость двигателя, и наоборот.
Строительство и испытания
Односторонняя печатная плата для драйвера бесщеточного двигателя постоянного тока показана на рис. 2, а схема ее компонентов — на рис. 3. Соберите схему на рекомендованной печатной плате, чтобы минимизировать ошибки сборки.IC2 должен быть установлен на стороне пайки печатной платы.
Рис. 2: Односторонняя печатная плата драйвера бесщеточного двигателя постоянного тока 3: Компоновка компонентов для печатной платы Загрузите печатную плату и компоновку компонентов в формате PDF: нажмите здесьПосле сборки компонентов подключите источник постоянного тока 5 В к разъему CON1. Чтобы проверить правильность работы схемы драйвера бесщеточного двигателя постоянного тока, проверьте правильность подачи 5 В для цепи на TP1 по отношению к TP0. Поверните VR1 по часовой стрелке или против часовой стрелки, чтобы увеличить или уменьшить скорость двигателя.
Для более интересных схемных проектов: нажмите здесь
Автор — бакалавр технических наук (электроника и связь) из GGSIPU, New Delhi
Эта статья была впервые опубликована 6 февраля 2017 г. и обновлена 15 декабря 2020 г.
MC33035 Коммутационная плата драйвера бесщеточного двигателя
Показанная здесь плата представляет собой коммутационную плату для контроллера бесщеточного двигателя MC33035. Требуется модуль IPM выходного буфера или МОП-транзисторы для завершения драйвера бесщеточного двигателя с обратной связью.Микросхема MC33035 — это сердце проекта; в проекте предусмотрено 6 импульсов ШИМ, а также 6 выходов инверсных импульсов. Встроенные перемычки помогают изменить направление, включение, торможение и фазирование. Разъем заголовка 60/120 предназначен для подключения датчиков Холла и источника питания, встроенный светодиодный индикатор питания и неисправности, потенциометр P1 помогает изменять скорость.
MC33035 — это высокопроизводительный монолитный бесщеточный контроллер двигателя постоянного тока второго поколения, содержащий все активные функции, необходимые для реализации полнофункциональной системы управления трех- или четырехфазным двигателем без обратной связи.Это устройство состоит из декодера положения ротора для правильной последовательности коммутации, эталонного сигнала с температурной компенсацией, способного подавать питание на датчик, частотно-программируемого генератора с зубчатой пилой, трех верхних драйверов с открытым коллектором и трех сильноточных драйверов на нижних полюсах, идеально подходящих для управления силовыми полевыми МОП-транзисторами. Также включены защитные функции, состоящие из блокировки при пониженном напряжении, циклического ограничения тока с выбираемым режимом отключения с задержкой по времени, внутреннего теплового отключения и уникального выхода неисправности, который может быть подключен к системам, управляемым микропроцессором.Типичные функции управления двигателем включают скорость разомкнутого контура, прямое или обратное направление, разрешение работы и динамическое торможение. MC33035 разработан для работы с фазами электрического датчика 60 ° / 300 ° или 120 ° / 240 °, а также может эффективно управлять щеточными двигателями постоянного тока.
Внутренний декодер положения ротора контролирует три входа датчиков (контакты 4, 5, 6), чтобы обеспечить правильную последовательность выходов верхнего и нижнего привода. Входы датчиков предназначены для непосредственного взаимодействия с переключателями на эффекте Холла с открытым коллектором или оптоволоконными соединителями.Включены внутренние подтягивающие резисторы, чтобы минимизировать необходимое количество внешних компонентов. Входы совместимы с TTL, их пороговые значения обычно составляют 2,2 В. Серия MC33035 предназначена для управления трехфазными двигателями и работает с четырьмя наиболее распространенными соглашениями о фазировании датчиков. Для удобства предусмотрен выбор 60 ° / 120 ° (контакт 22), который позволяет MC33035 настраиваться для управления двигателями, имеющими фазировку электрического датчика 60 °, 120 °, 240 ° или 300 °. Для трех входов датчиков существует восемь возможных кодовых комбинаций входов, шесть из которых являются действительными положениями ротора.Остальные два кода недействительны и обычно вызваны обрывом или коротким замыканием сенсорной линии. С шестью допустимыми входными кодами декодер может определить положение ротора двигателя с точностью до 60 электрических градусов. Вход прямого / обратного хода (вывод 3) используется для изменения направления вращения двигателя путем изменения напряжения на обмотке статора. Когда вход меняет состояние с высокого на низкое с заданным кодом входа датчика (например, 100), активированные верхние и нижние выходы привода с одинаковым буквенным обозначением меняются местами (AT на AB, BT на BB, CT на CB).Фактически, последовательность коммутации меняется на обратную, и двигатель меняет направление вращения. Управление включением / выключением двигателя осуществляется с помощью выхода разрешения (вывод 7). В отключенном состоянии внутренний источник тока 25 мкА обеспечивает последовательное переключение между верхним и нижним
.выходов привода. При заземлении выходы верхнего привода выключаются, а нижние приводы переводятся в низкий уровень, что приводит к выбегу двигателя и срабатыванию выхода неисправности. Динамическое торможение двигателя позволяет создать в конечном продукте дополнительный запас прочности.Торможение осуществляется переводом входа тормоза (вывод 23) в состояние высокого уровня. Это приводит к выключению выходов верхнего привода и включению нижнего привода, замыкая генерируемую двигателем обратную ЭДС. Тормозной вход имеет безусловный приоритет над всеми остальными входами. Внутренний подтягивающий резистор 40 кОм упрощает взаимодействие с предохранительным выключателем системы, обеспечивая активацию тормоза при размыкании или отключении. Таблица истинности коммутационной логики показана на рисунке 20. Четырехвходовой вентиль ИЛИ-НЕ используется для контроля входа тормоза и входов трех выходных транзисторов верхнего привода.Его цель — отключить торможение до тех пор, пока выходы верхнего привода не достигнут высокого состояния. Это помогает предотвратить одновременное включение верхнего и нижнего переключателей питания. В приложениях с полуволновым двигателем выходы верхнего привода не требуются и обычно остаются отключенными. В этих условиях торможение по-прежнему будет выполняться, поскольку вентиль ИЛИ-НЕ определяет базовое напряжение на выходных транзисторах верхнего привода.
Продолжительная работа двигателя при сильной перегрузке приводит к перегреву и возможному выходу из строя.Это деструктивное состояние лучше всего можно предотвратить с помощью поэтапного ограничения тока. То есть каждый включенный цикл рассматривается как отдельное событие. Поцикловое ограничение тока осуществляется путем мониторинга нарастания тока статора каждый раз, когда выходной переключатель проводит ток, и при обнаружении состояния перегрузки по току, немедленно выключая переключатель и удерживая его в выключенном состоянии в течение оставшейся продолжительности разгона генератора. период. Ток статора преобразуется в напряжение путем вставки измерительного резистора, привязанного к земле.Напряжение, развиваемое на резисторе считывания, контролируется входом считывания тока (контакты 9 и 15) и сравнивается с внутренним эталонным напряжением 100 мВ. Входы компаратора считывания тока имеют диапазон входного синфазного сигнала приблизительно 3,0 В. Если пороговое значение считывания тока 100 мВ превышено, компаратор сбрасывает нижнюю защелку считывания и прекращает срабатывание выходного переключателя. Значение резистора считывания тока:
RS = 0,1 / I статор (макс.)
Выход неисправности активируется при перегрузке по току.Конфигурация ШИМ с двумя защелками гарантирует, что только один выходной импульс проводимости возникает в течение любого заданного цикла генератора, независимо от того, завершается ли он выходом усилителя ошибки или компаратора ограничения тока.
Технические характеристики
- Питание 12-18В
- Перемычки для направления, включения, фазировки 60/120, торможения
- Светодиод D1 Неисправность
- Светодиод D2 Power LED
- Регулировка скорости Pot P1
- CN1 6 выходов PWM
- CN3 6 инверсных выходов PWM
- Вход питания CN4
- CN2 Интерфейс датчика Холла
- Частота 18 кГц
Схема
Список деталей
Подключения
Внутренняя схема
Выход по сравнению с датчиком Холла
Последовательность импульсов положения ротора
Фото
MC33035 Лист данных
MC33035-DОднофазный бесщеточный двигатель постоянного тока
— Результаты поиска продуктов | ROHM Полупроводник
Драйвер двигателя Быстрый поиск
| до | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BD61250MUV @ DC, PWM / FG, AL | |||||||||||||||||
| BD61251FV @ ШИМ / FG | |||||||||||||||||
| BD69740FV @ DC, ШИМ / AL | |||||||||||||||||
| BD69730FV @ DC, ШИМ / FG | |||||||||||||||||
| 1.8 | |||||||||||||||||
| BD61245EFV @ DC, ШИМ / FG | |||||||||||||||||
| 1.2 | |||||||||||||||||
| BD61248NUX @ ШИМ / FG | |||||||||||||||||
| BD61243FV @ DC, ШИМ / FG | |||||||||||||||||
| BD6995FV @ DC / FG, AL | |||||||||||||||||
| 1.0 | |||||||||||||||||
| BD69060GFT @ ШИМ / FG | |||||||||||||||||
| BD6964F @ ШИМ / AL | |||||||||||||||||
| BD6961F @ ШИМ / FG | |||||||||||||||||
| BD6971FV @ DC, ШИМ / FG | |||||||||||||||||
| 0.9 | |||||||||||||||||
| BD69830FV @ PWM / FG, AL | |||||||||||||||||
| 0.8 | |||||||||||||||||
| BD6964FVM @ ШИМ / AL | |||||||||||||||||
| BD6962FVM @ ШИМ / FG | |||||||||||||||||
| BD6968FVM @ DC, ШИМ / AL | |||||||||||||||||
| BD6967FVM @ DC, PWM / FG | |||||||||||||||||
| BD6982FVM @ Нет входного контакта / AL | |||||||||||||||||
| BD6981FVM @ Нет входного контакта / FG | |||||||||||||||||
| BD6965NUX @ ШИМ / FG | |||||||||||||||||
| BU6909AGFT @ ШИМ / FG | |||||||||||||||||
| BU69090NUX @ ШИМ / FG | |||||||||||||||||
| 0.6 | |||||||||||||||||
| BH6766FVM @ Нет входного контакта / FG | |||||||||||||||||
PN00110-12C — Бесщеточный (BLDC) регулятор скорости драйвера двигателя 12 В 17A
Технические характеристики:
- Останов при 6000 об / мин
- Режим плавного пуска
- Управление аварийной остановкой
- Аналоговое управление 0-5 В пост. Тока
- Цифровое управление ШИМ (от 7 кГц до 16 кГц)
- Реверсивное управление
- Номинальное напряжение 11-16 В постоянного тока
- Продолжительный режим при 17 А
- Подходит для источников питания постоянного тока
- Полностью закрытый
Инструкции по подключению:
- Подсоедините 3-фазные провода (A, B и C) к 3-фазным проводам двигателя BLDC.Если у вас есть сенсорный двигатель BLDC, оставьте провода датчика Холла. Для этого контроллера не требуются датчики Холла.
- Подключите толстый красный провод + 12VDC (IN) к положительной клемме источника питания или аккумулятора.
- Подключите толстый черный провод 0 В (GND) к отрицательной клемме источника питания или аккумулятора.
- Убедитесь, что вы подключаете контроллер с соблюдением правильной полярности. Обратная полярность приведет к повреждению этого контроллера.
Для подключения к потенциометру для ручного управления:
- Подключите тонкий черный провод 0 В (GND) к GND вашего горшка.
- Подключите тонкий желтый провод SIGNAL (IN) к выходу вашего горшка.
- Подключите тонкий красный провод 5 В постоянного тока к + Vcc вашего горшка.
- Введите тумблер включения / выключения между тонким черным проводом и тонким белым проводом REVERSE. Это позволит вам переключаться между вращением по часовой стрелке и против часовой стрелки.
- Введите тумблер включения / выключения между тонким черным проводом и тонким синим проводом СТОП. Это позволит вам переключаться между функциями остановки и запуска.
- Введите тумблер включения / выключения между тонким черным проводом и тонким зеленым проводом МЯГКИЙ ПУСК.Это позволит вам включить / отключить функцию плавного запуска. Время разгона плавного пуска составляет около 3 секунд.
Для подключения к микроконтроллеру:
- Логическое напряжение должно быть 5 В постоянного тока.
- PWM должен выводить как минимум с частотой 7 кГц. Максимальная частота 16 кГц. Подключите сигнал PWM к тонкому желтому проводу SIGNAL (IN).
- Переключение сигналов между низким (0 В постоянного тока) и высоким (5 В постоянного тока) на тонкий белый провод REVERSE для вращения по часовой и против часовой стрелки.
- Переключайте сигналы между низким (0 В постоянного тока) и высоким (5 В постоянного тока) тонким синим проводом STOP для функций останова (низкий уровень) и работы (высокий уровень).