


ДПТ — это… Что такое ДПТ?

Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
История
Краткое описание коллекторного двигателя постоянного тока
Простейший двигатель на рис. 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент, в первом приближении (магнитное поле полюсов статора B — равномерное (однородное) и др.) равный
 , где
, где  — число витков обмотки ротора,
— число витков обмотки ротора,  — индукция магнитного поля полюсов статора,
— индукция магнитного поля полюсов статора,  — ток в обмотке ротора [А],
— ток в обмотке ротора [А], 
 — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
— расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],  — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
— синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],  — угловая скорость [рад/сек],
— угловая скорость [рад/сек], 
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
 , где n — число щёток, alfa — угловая ширина одной щётки [радиан].
, где n — число щёток, alfa — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот =  ):
):

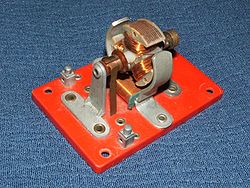
Рис. 2 Коллекторный двигатель постоянного тока с двухполюсным статором и с трёхполюсным ротором
Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор
На статоре ДПТ располагаются в зависимости от конструкции:
- постоянные магниты
- электромагниты с обмотками возбуждения — катушки, наводящие магнитный поток возбуждения
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Ротор
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две «мёртвые точки» из которых невозможен самозапуск двигателя.
Рис. 3 Ротор
Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным  где
где  — масса цилиндра (ротора), а
— масса цилиндра (ротора), а  — радиус цилиндра (ротора).
— радиус цилиндра (ротора).
Коллектор (коллекторный узел, щёточный узел, коллекторно-щёточный узел, щёточно-коллекторный узел)
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции — является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
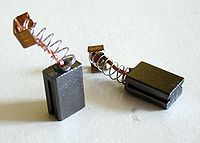
Рис. 4 Графитовые щётки
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Классификация
- По виду магнитной системы статора
- С постоянными магнитами
- С электромагнитами
- По способу включения обмоток возбуждения электромагнитов статора
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Принцип работы
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
Рамка с током в однородном магнитном поле полюсов статора
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера  постоянной величины, равные
постоянной величины, равные
 и направленные в противоположные стороны.
и направленные в противоположные стороны.
Эти силы прикладываются к плечам  , равным
, равным
 , где — радиус рамки, и создают крутящий момент
, где — радиус рамки, и создают крутящий момент  , равный
, равный
 .
.
Для двух стержней рамки суммарный крутящий момент равен
 . Практически из-за того, что угловая ширина щётки
. Практически из-за того, что угловая ширина щётки  [радиан] немного меньше угловой ширины зазора
[радиан] немного меньше угловой ширины зазора 
 , где
, где  , не участвуют в создании общего крутящего момента.
, не участвуют в создании общего крутящего момента.При числе витков в обмотке равном s крутящий момент будет равен .
Наибольший крутящий момент будет при угле поворота рамки равном  , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
, т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода  :
:

При s витков в обмотке

Две рамки с током в однородном магнитном поле полюсов статора
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π / 2, то получится четырёхполюсный ротор. Момент второй рамки:

Суммарный момент обеих рамок:

Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных
 , где Δ = β − α, не участвуют в создании общего крутящего момента.
, где Δ = β − α, не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону
 , то крутящий момент для одного стержня будет равен
, то крутящий момент для одного стержня будет равен
 ,
,
для двух стержней
 ,
,
для рамки из витков
 .
.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные
 .
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :

При s витках в обмотке

Две рамки с током в неоднородном магнитном поле полюсов статора
Для второй (косинусной) рамки  ,
,
крутящий момент от второй (косинусной) рамки будет равен
 ,
,
суммарный крутящий момент от обеих рамок равен
 , т.е. постоянен и от угла поворота ротора не зависит.
, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные
 каждая,
каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать в первом приближении сплошным однородным цилиндром с моментом инерции
 , где — масса цилиндра (ротора), — радиус цилиндра (ротора).
, где — масса цилиндра (ротора), — радиус цилиндра (ротора).
Взаимодействие магнитных полей
Магнитные поля статора и ротора (рамки с током), взаимоотталкиваются, чем ротор (рамка) приводится во вращение на 180°. Для дальнейшего вращения необходимо переключение направления тока в рамке.
Разновидности
Коллекторные, с щёточноколлекторным переключателем тока
С одним коллектором (щёточноколлекторным узлом) и  обмотками, где
обмотками, где  — число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
— число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
 , где
, где  — число щёток, — угловая ширина одной щётки (рад),
— число щёток, — угловая ширина одной щётки (рад),  — число пи (3,14…).
— число пи (3,14…).
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных с инвертором на двух параллельных мостах) и двумя обмотками синусной и косинусной (синусно-косинусный, двухфазный) с неоднородным (синусообразным) магнитным полем полюсов статора. Имеют малую нерабочую часть под кривой крутящего момента, равную
 , где
, где  — угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
— угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).
С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), специальные. Специальная конструкция коллектора с четырьмя коллекторами (один коллектор на одну щётку) позволяет почти до нуля уменьшить нерабочую часть крутящего момента (нерабочая часть крутящего момента в этом двигателе зависит от точности изготовления деталей) и сделать используемую часть крутящего момента независимой от угловой ширины щётки. При этом угловая ширина одной пластины коллектора равна  , где — угловая ширина одной щётки.
, где — угловая ширина одной щётки.
С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных — с инвертором на четырёх параллельных мостах, четырёхфазный).
С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
И др.
Другие виды электродвигателей постоянного тока
Применение
- Электропривод тепловозов, теплоходов, карьерных самосвалов
- Стартёры автомобилей, тракторов и др. Для уменьшения номинального напряжения двигателя в автомобильных стартёрах применяют двигатель постоянного тока с четырьмя щётками, при этом эквивалентное комплексное сопротивление ротора уменьшается почти в четыре раза, при этом статор имеет четыре полюса (две пары полюсов). Пусковой ток в автомобильных стартёрах около 200 ампер. Режим работы — кратковременный.
Бесколлекторные, с электронным переключателем тока
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (Вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Управление ДПТ
Механическая характеристика ДПТ
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика ДПТ
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Управление ДПТ
Основные формулы, используемые при управлении ДПТ:
Крутящий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора):
 , где
, где  — ток в обмотке якоря,
— ток в обмотке якоря,  — коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
— коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора:
 , где
, где  — напряжение, приложенное к обмотке ротора,
— напряжение, приложенное к обмотке ротора,  — сопротивление обмотки ротора.
— сопротивление обмотки ротора.
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора:
 , где
, где  — коэффициент ЭДС двигателя,
— коэффициент ЭДС двигателя,  — угловая скорость вращения ротора.
— угловая скорость вращения ротора.
Следовательно, величиной крутящего момента можно управлять меняя напряжение на ДПТ. Такой способ применяют для относительно маломощных двигателей.
Для управления более сильными (мощными) двигателями используют: а) принцип ШИМ, когда изменяется не величина напряжения, а длительность его приложения к двигателю, б) регулирование крутящего момента изменением напряжения на обмотке возбуждения, требует меньшую мощность элементов схемы управления, чем регулирование изменением напряжения на всём двигателе, но при этом способе регулирования ток через обмотку якоря не управляется, из-за этого даже при малом крутящем моменте большой ток через обмотку якоря будет нагревать обмотку якоря, что может привести к перегреву и выходу из строя двигателя. Возможно применение для регулирования крутящего момента в небольших пределах от номинального крутящего момента.
Управление двигателем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Достоинства и недостатки ДПТ
Достоинства:
- Простота устройства и управления
- Практически линейные механическая и регулировочная характеристики двигателя
- Легко регулировать частоту вращения.
- Хорошие пусковые свойства (большой пусковой момент).
Недостатки:
- Необходимость профилактического обслуживания коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
См. также
Ссылки
Wikimedia Foundation. 2010.
ДПТ — это… Что такое ДПТ?
ДПТ — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
ДПТ — дальнобойная планирующая торпеда двигатель постоянного тока … Словарь сокращений русского языка
Геро (дпт. Франц.) — (Hérault) дпт. Франции, состоящий из частей прежнего Лангедока; имеет 6198 кв. км пространства и 441527 жителей. Почти на одну треть занят юго западн. отрогами Севенн, склон которых направляется к ЮВ, где расстилаются обширные равнины и немногие… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Па-де-Калэ (Па-де-Кале) франц. дпт. — прежде графство Артуа и часть Пикардии, граничит на З Ламаншем, на С проливом П. де Калэ и Северным морем, на Ю дпт. Соммы, а на В Северным дпт ом; 6750 кв. км. Поверхность равнинная, прорезана невысокими холмами. Морской берег частью песчаный… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Па-де-Калэ, франц. дпт. — (Па де Кале) прежде графство Артуа и часть Пикардии, граничит на З Ламаншем, на С проливом П. де Калэ и Северным морем, на Ю дпт. Соммы, а на В Северным дпт ом; 6750 кв. км. Поверхность равнинная, прорезана невысокими холмами. Морской берег… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
дочерние продукты радона (ДПР) и торона (ДПТ)
Короткоживущие дочерние продукты радона (ДПР) и торона (ДПТ) — 2.6. Короткоживущие дочерние продукты радона (ДПР) и торона (ДПТ) изотопы RaA (28Ро), RaB (2l4Pb), RaC (2l4Bi) и ThB (212Pb), ThC (2l2Bi), соответственно. Источник … Словарь-справочник терминов нормативно-технической документации
Марны Верхней дпт. — (Haute Marne) во Франции, часть прежней Шампани и Бургундии. 6220 кв. км, 3 округа, 28 кантонов, 550 общин, 243533 жит. (1891 г.). Гл. г. Шомон. На Ю Лангрское плато (до 520 м), водораздел между Сенским, Рейнским и Ронским бассейнами. Из рек… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Ош, дпт. Жер — (Auch) гл. гор. франц. дпт. Жер на левом берегу р. Жер. Собор XV стол. с красивой живописью на окнах; 12375 жит. Фабрики бумагопрядильные, полотняные и шерстяные; винокуренные заводы, торговля скотом, хлебом вином. Библиотека, музей. О. древний… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Автомобиль диагностики пожарной техники (А ДПТ) — 2.26. Автомобиль диагностики пожарной техники (А ДПТ) пожарный автомобиль, оборудованный техническими средствами оценки технического состояния пожарной техники и предназначенный для доставки личного состава и оборудования к месту проведения… … Словарь-справочник терминов нормативно-технической документации
Двигатель постоянного тока — это… Что такое Двигатель постоянного тока?
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
История
Краткое описание коллекторного двигателя постоянного тока
, где — число витков обмотки ротора, — индукция магнитного поля полюсов статора, — ток в обмотке ротора [А], — длина рабочей части витка обмотки [м], — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м], — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад], — угловая скорость [рад/сек], — время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
, где n — число щёток, alfa — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот = ):
Рис. 2 Коллекторный двигатель постоянного тока с двухполюсным статором и с трёхполюсным ротором
Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор
На статоре ДПТ располагаются в зависимости от конструкции:
- постоянные магниты
- электромагниты с обмотками возбуждения — катушки, наводящие магнитный поток возбуждения
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Ротор
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две «мёртвые точки» из которых невозможен самозапуск двигателя.
Рис. 3 Ротор
Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным где — масса цилиндра (ротора), а — радиус цилиндра (ротора).
Коллектор (коллекторный узел, щёточный узел, коллекторно-щёточный узел, щёточно-коллекторный узел)
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции — является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
Рис. 4 Графитовые щётки
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Классификация
- По виду магнитной системы статора
- С постоянными магнитами
- С электромагнитами
- По способу включения обмоток возбуждения электромагнитов статора
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Принцип работы
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
Рамка с током в однородном магнитном поле полюсов статора
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера постоянной величины, равные
и направленные в противоположные стороны.
Эти силы прикладываются к плечам , равным
, где — радиус рамки, и создают крутящий момент , равный
.
Для двух стержней рамки суммарный крутящий момент равен
. Практически из-за того, что угловая ширина щётки [радиан] немного меньше угловой ширины зазора между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные , где , не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s крутящий момент будет равен .
Наибольший крутящий момент будет при угле поворота рамки равном , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода :
При s витков в обмотке
Две рамки с током в однородном магнитном поле полюсов статора
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π / 2, то получится четырёхполюсный ротор. Момент второй рамки:
Суммарный момент обеих рамок:
Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных
, где Δ = β − α, не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону
, то крутящий момент для одного стержня будет равен
,
для двух стержней
,
для рамки из витков
.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :
При s витках в обмотке
Две рамки с током в неоднородном магнитном поле полюсов статора
Для второй (косинусной) рамки ,
крутящий момент от второй (косинусной) рамки будет равен
,
суммарный крутящий момент от обеих рамок равен
, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные
каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать в первом приближении сплошным однородным цилиндром с моментом инерции
, где — масса цилиндра (ротора), — радиус цилиндра (ротора).
Взаимодействие магнитных полей
Магнитные поля статора и ротора (рамки с током), взаимоотталкиваются, чем ротор (рамка) приводится во вращение на 180°. Для дальнейшего вращения необходимо переключение направления тока в рамке.
Разновидности
Коллекторные, с щёточноколлекторным переключателем тока
С одним коллектором (щёточноколлекторным узлом) и обмотками, где — число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
, где — число щёток, — угловая ширина одной щётки (рад), — число пи (3,14…).
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных с инвертором на двух параллельных мостах) и двумя обмотками синусной и косинусной (синусно-косинусный, двухфазный) с неоднородным (синусообразным) магнитным полем полюсов статора. Имеют малую нерабочую часть под кривой крутящего момента, равную
, где — угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).
С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), специальные. Специальная конструкция коллектора с четырьмя коллекторами (один коллектор на одну щётку) позволяет почти до нуля уменьшить нерабочую часть крутящего момента (нерабочая часть крутящего момента в этом двигателе зависит от точности изготовления деталей) и сделать используемую часть крутящего момента независимой от угловой ширины щётки. При этом угловая ширина одной пластины коллектора равна , где — угловая ширина одной щётки.
С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных — с инвертором на четырёх параллельных мостах, четырёхфазный).
С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
И др.
Другие виды электродвигателей постоянного тока
Применение
- Электропривод тепловозов, теплоходов, карьерных самосвалов
- Стартёры автомобилей, тракторов и др. Для уменьшения номинального напряжения двигателя в автомобильных стартёрах применяют двигатель постоянного тока с четырьмя щётками, при этом эквивалентное комплексное сопротивление ротора уменьшается почти в четыре раза, при этом статор имеет четыре полюса (две пары полюсов). Пусковой ток в автомобильных стартёрах около 200 ампер. Режим работы — кратковременный.
Бесколлекторные, с электронным переключателем тока
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (Вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Управление ДПТ
Механическая характеристика ДПТ
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика ДПТ
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Управление ДПТ
Основные формулы, используемые при управлении ДПТ:
Крутящий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора):
, где — ток в обмотке якоря, — коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора:
, где — напряжение, приложенное к обмотке ротора, — сопротивление обмотки ротора.
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора:
, где — коэффициент ЭДС двигателя, — угловая скорость вращения ротора.
Следовательно, величиной крутящего момента можно управлять меняя напряжение на ДПТ. Такой способ применяют для относительно маломощных двигателей.
Для управления более сильными (мощными) двигателями используют: а) принцип ШИМ, когда изменяется не величина напряжения, а длительность его приложения к двигателю, б) регулирование крутящего момента изменением напряжения на обмотке возбуждения, требует меньшую мощность элементов схемы управления, чем регулирование изменением напряжения на всём двигателе, но при этом способе регулирования ток через обмотку якоря не управляется, из-за этого даже при малом крутящем моменте большой ток через обмотку якоря будет нагревать обмотку якоря, что может привести к перегреву и выходу из строя двигателя. Возможно применение для регулирования крутящего момента в небольших пределах от номинального крутящего момента.
Управление двигателем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Достоинства и недостатки ДПТ
Достоинства:
- Простота устройства и управления
- Практически линейные механическая и регулировочная характеристики двигателя
- Легко регулировать частоту вращения.
- Хорошие пусковые свойства (большой пусковой момент).
Недостатки:
- Необходимость профилактического обслуживания коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
См. также
Ссылки
Wikimedia Foundation. 2010.
устройство и принцип действия, конструкция и управление, применение дпт
 Устройство, которое преобразует электрическую энергию в механическую, может использоваться как двигатель или генератор, так как конструкция и принцип действия двигателя постоянного тока (ДПТ) аналогична конструкции генератора. Особенностью ДПТ является механический инвертор (коммутатор). Этот коммутатор имеет скользящие контакты в виде щёток, которые расположены так, что они изменяют полярность обмоток якоря (катушек) во время вращательного движения.
Устройство, которое преобразует электрическую энергию в механическую, может использоваться как двигатель или генератор, так как конструкция и принцип действия двигателя постоянного тока (ДПТ) аналогична конструкции генератора. Особенностью ДПТ является механический инвертор (коммутатор). Этот коммутатор имеет скользящие контакты в виде щёток, которые расположены так, что они изменяют полярность обмоток якоря (катушек) во время вращательного движения.
Особенности и устройство ДПТ
ДПТ представляет собой вращающуюся электрическую машину, работающую от постоянного тока. В зависимости от направления потока мощности проводится различие между двигателем (электродвигатель с электрической и механической мощностью) и генератором (электрический генератор, на который подаётся механическая мощность, а также электроэнергия). ДПТ могут запускаться под нагрузкой, их скорость легко изменить. В режиме генератора ДПТ преобразует напряжение переменного тока, подаваемое ротором, в пульсирующее постоянное напряжение.
История изобретения
Основываясь на развитии первых гальванических элементов в первой половине XIX века, первыми электромеханическими преобразователями энергии были машины постоянного тока. Первоначальная форма электродвигателя была разработана в 1829 году, а в 1832 году француз Ипполит Пиксии построил первый генератор. Антонио Пачинотти построил в 1860 году электродвигатель постоянного тока с многокомпонентным коммутатором. Фридрих фон Хефнер-Алтенек разработал барабанный якорь в 1872 году, который открыл возможность промышленного использования в области крупномасштабного машиностроения.
В последующие десятилетия такие машины из-за развития трехфазного переменного тока потеряли свою значимость в крупномасштабном машиностроении. Синхронные машины и системы с низким уровнем обслуживания асинхронного двигателя заменили их во многих устройствах.
Конструкция двигателя
Чтобы понять принцип действия ДПТ, нужно сначала изучить его конструктивные особенности, одной из которых является то, что в магнитном поле постоянного магнита установлен вращающийся проводящий контур.

Упрощая эту структуру, можно сказать, что двигатель состоит из двух основных компонентов:
- Основной магнит (постоянный магнит), который прикреплён к статору. Магнитное поле также может быть электрически сгенерировано. На статоре находятся так называемые возбуждающие обмотки (катушки).
- Проводящая петля (арматура) на сердечнике якоря, обычно состоящая из слоистых металлических листов.
Обе конструкции называются двигателями постоянного тока с внешним возбуждением. Электродинамический закон указывает, что токопроводящая петля проводника в магнитном поле представляет собой силу [F], зависящую от тока [I] и напряжённости магнитного поля [B]. Токопроводящий проводник окружен круговым магнитным полем. Если объединить магнитное поле магнитного поля с магнитным полем проводящей петли, можно обнаружить суперпозицию двух полей, а также результирующий силовой эффект.
Обмотка якоря состоит из двух половин катушки. Если применить напряжение постоянного тока к двум концам обмотки якоря, можно представить, что движущиеся носители заряда поступают в нижнюю половину катушки из верхней половины катушки.
Каждая токопроводящая катушка развивает собственное магнитное поле, и магнитное поле постоянного магнита накладывается на магнитное поле нижней половины катушки и поле верхней половины катушки. Линии поля постоянного магнитного поля всегда одного направления, они всегда показывают с севера на южный полюс. Напротив, поля двух половин катушки имеют противоположные направления.
В левой части поля половины катушки полевые линии поля возбудителя и поля катушки имеют одно и то же направление. Благодаря этому силовому эффекту в противоположном направлении на нижнем и верхнем концах арматуры создаётся крутящий момент, который вызывает вращательное движение якоря.
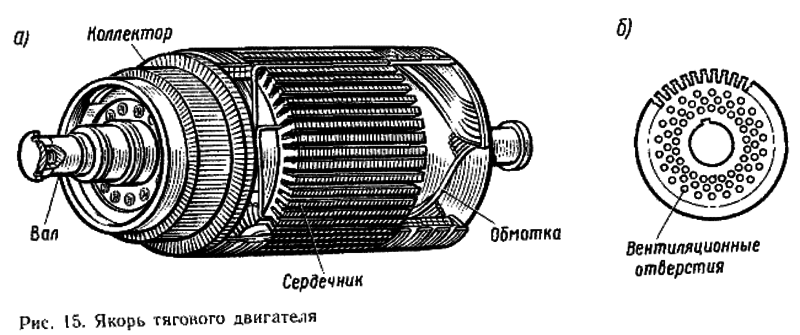
Якорь представляет собой так называемый двутавровый якорь. Эта конструкция получила название из-за своей формы, которая напоминает два составных «Т». Катушки якоря соединены с платами коммутатора (коллектора). Подача тока в обмотке якоря обычно осуществляется через угольные щётки, которые обеспечивают скользящий контакт с вращающимся коммутатором и подают катушкам электричество. Щётки изготавливаются из самосмазывающихся графитов, частично смешанных с медным порошком для небольших двигателей.
Принцип действия и использование
Это устройство представляет собой электромашину, которая преобразовывает электрическую энергию в механическую. Принцип работы двигателя постоянного тока заключается в том, что всякий раз, когда проводник, переносимый током, помещается в магнитное поле, он испытывает механическую силу.
 Постоянный магнит преобразовывает электрическую энергию в механическую через взаимодействие двух магнитных полей. Одно поле создаётся сборкой постоянными магнитами, другое — электрическим током, протекающим в обмотках двигателя. Эти два поля приводят к крутящему моменту, который имеет тенденцию вращать ротор. Когда ротор вращается, ток в обмотках коммутируется, обеспечивая непрерывный выход крутящего момента.
Постоянный магнит преобразовывает электрическую энергию в механическую через взаимодействие двух магнитных полей. Одно поле создаётся сборкой постоянными магнитами, другое — электрическим током, протекающим в обмотках двигателя. Эти два поля приводят к крутящему моменту, который имеет тенденцию вращать ротор. Когда ротор вращается, ток в обмотках коммутируется, обеспечивая непрерывный выход крутящего момента.
Коммутатор состоит из проводящих сегментов (стержней) из меди, которые представляют собой завершение отдельных катушек проволоки, распределённых вокруг арматуры. Вторая половина механического выключателя комплектуется щётками. Эти щётки обычно остаются неподвижными с корпусом двигателя.
По мере прохождения электрической энергии через щётки и арматуру создаётся крутильная сила в виде реакции между полем двигателя и якорем, вызывающим поворот якоря двигателя. Когда арматура поворачивается, щётки переключаются на соседние полосы на коммутаторе. Это действие переносит электрическую энергию на соседнюю обмотку и якорь.
Движение магнитного поля достигается переключением тока между катушками внутри двигателя. Это действие называется коммутацией. Очень многие двигатели имеют встроенную коммутацию. Это означает, что при вращении двигателя механические щётки автоматически коммутируют катушки на роторе.
Настройка скорости
ДПТ можно легко регулировать. Скорость можно изменить с помощью следующих переменных:
 Напряжение якоря U_A (управление напряжением).
Напряжение якоря U_A (управление напряжением).- Основной поток поля (полевое управление), сила магнитного поля.
- Анкерное сопротивление.
 Напряжение якоря U_A (управление напряжением).
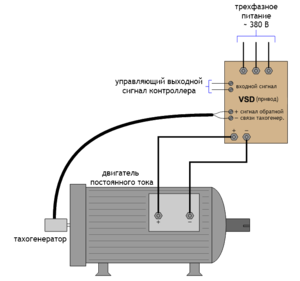
Напряжение якоря U_A (управление напряжением).Простейшим методом управления скоростью вращения является управление приводным напряжением. Чем выше напряжение, тем выше скорость, которую двигатель пытается достичь. Во многих приложениях простое регулирование напряжения может привести к большим потерям мощности в цепи управления, поэтому широко используется метод широтно-импульсной модуляции.
В основном способе с широтно-импульсной модуляцией рабочая мощность включается и выключается для модуляции тока. Отношение времени включения к «выключенному» времени определяет скорость двигателя.
Электродвигатель с внешним возбуждением легко контролировать, поскольку токи через обмотки якоря и статора можно контролировать отдельно. Поэтому такие двигатели имели определённое значение, особенно в области высоко динамичных приводных систем, например, для привода станков с точной регулировкой скорости и крутящего момента.
Современное применение
ДПТ используются в различных областях.

Он является важным элементом в различных продуктах:
- игрушках;
- сервомеханических устройствах;
- приводах клапанов;
- роботах;
- автомобильной электронике.
Высококачественные предметы повседневного назначения (кухонные приборы) используют серводвигатель, известный как универсальный двигатель. Эти универсальные двигатели являются типичными ДПТ, в которых стационарные и вращающиеся катушки представляют собой последовательные провода.
Двигатель постоянного тока
Двигатели постоянного тока предназначены для превращения энергии постоянного тока в механическую работу.
Электродвигатели постоянного тока, намного меньше распространены, нежели двигатели переменного тока. Это связано в первую очередь со сравнительной дороговизной, более сложным устройством, сложностями в обеспечении питания. Но, несмотря на все эти недостатки, ДПТ имеют немало плюсов. Например, двигатели переменного тока, сложно регулировать, ДПТ же отлично регулируются массой способов. Кроме того ДПТ имеют более жесткие механические характеристики и позволяют обеспечить большой пусковой момент.
Электродвигатели постоянного тока применяются в качестве тяговых двигателей, в электротранспорте, в качестве различных исполнительных устройств.
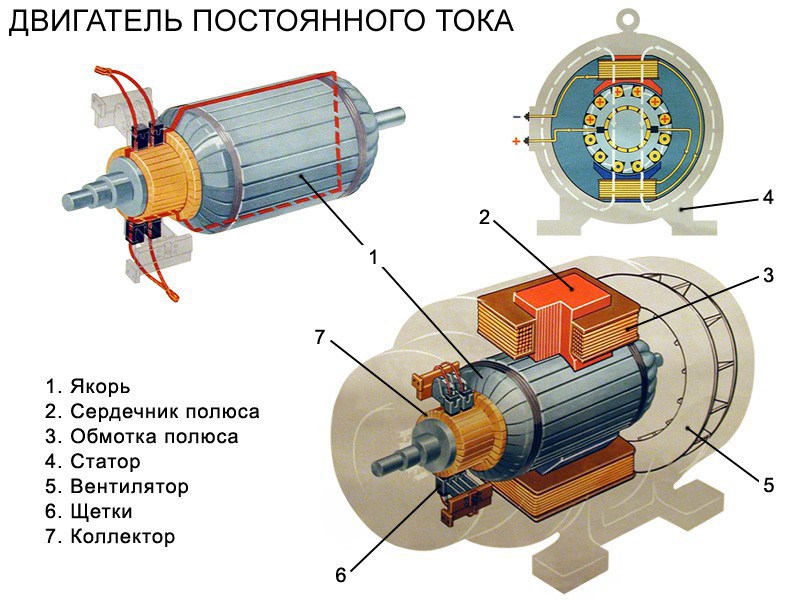
Устройство двигателей постоянного тока

Конструкция двигателя постоянного тока аналогична двигателю переменного тока, но все же имеются существенные различия. На станине 7, которая изготавливается из стали, установлена обмотка возбуждения в виде катушек 6. Между основными полюсами, могут устанавливаться дополнительные полюса 5, для улучшения свойств ДПТ. Внутри устанавливается якорь 4, который состоит из сердечника и коллектора 2, и устанавливается с помощью подшипников 1 в корпус двигателя. Коллектор является существенным отличием от двигателей переменного тока. Он соединяется с щетками 3, что позволяет подавать или в генераторах, наоборот снимать напряжение с якорной цепи.
Принцип действия

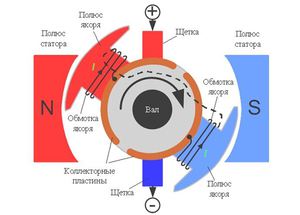
Принцип действия ДПТ основан на взаимодействии магнитных полей обмотки возбуждения и якоря. Можно представить, что вместо якоря у нас рамка, через которую протекает ток, а вместо обмотки возбуждения постоянный магнит с полюсами N и S. При протекании постоянного тока через рамку, на нее начинает действовать магнитное поле постоянного магнита, то есть рамка начинает вращаться, причем, так как направление тока не меняется, то и направление вращения рамки остается прежним.
При подаче напряжения на зажимы двигателя начинает протекать ток в обмотке якоря, на него, как мы уже знаем, начинает действовать магнитное поле машины, при этом якорь начинает вращаться, а так как якорь вращается в магнитном поле, начинает образовываться ЭДС. Эта ЭДС направлена против тока, в связи с этим её называют противоЭДС. Её можно найти по формуле

Где Ф – магнитный поток возбуждения, n – частота вращения, а Cе это конструктивный момент машины, который остается для нее постоянным.
Напряжение на зажимах больше чем противоЭДС на величину падения напряжение в якорной цепи.

А если домножить это выражение на ток, то получим уравнение баланса мощностей.

Левая часть уравнения UIя представляет собой мощность подаваемая электродвигателю, в правой части первое слагаемое EIя представляет собой электромагнитную мощность, а второе IяRя мощность потерь в цепи якоря.
Рекомендуем прочесть статью — пуск двигателя постоянного тока.
ДПТ — это… Что такое ДПТ?
ДПТ — Демократическая партия Таджикистана полит., Таджикистан Источник: http://news.mail.ru/news.html?481145 ДПТ договор простого товарищества ДПТ двигатель постоянного тока Словари: Словарь сокращений и аббревиатур армии и спецслужб. Сост. А. А.… … Словарь сокращений и аббревиатур
ДПТ — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
Геро (дпт. Франц.) — (Hérault) дпт. Франции, состоящий из частей прежнего Лангедока; имеет 6198 кв. км пространства и 441527 жителей. Почти на одну треть занят юго западн. отрогами Севенн, склон которых направляется к ЮВ, где расстилаются обширные равнины и немногие… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Па-де-Калэ (Па-де-Кале) франц. дпт. — прежде графство Артуа и часть Пикардии, граничит на З Ламаншем, на С проливом П. де Калэ и Северным морем, на Ю дпт. Соммы, а на В Северным дпт ом; 6750 кв. км. Поверхность равнинная, прорезана невысокими холмами. Морской берег частью песчаный… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Па-де-Калэ, франц. дпт. — (Па де Кале) прежде графство Артуа и часть Пикардии, граничит на З Ламаншем, на С проливом П. де Калэ и Северным морем, на Ю дпт. Соммы, а на В Северным дпт ом; 6750 кв. км. Поверхность равнинная, прорезана невысокими холмами. Морской берег… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
дочерние продукты радона (ДПР) и торона (ДПТ) — 3.3 дочерние продукты радона (ДПР) и торона (ДПТ): Ряды продуктов самопроизвольного распада радона и торона. Источник: ТСН 23 354 2004: Требования по обеспечению радиационной безопасности при строительстве в Московской области … Словарь-справочник терминов нормативно-технической документации
Короткоживущие дочерние продукты радона (ДПР) и торона (ДПТ) — 2.6. Короткоживущие дочерние продукты радона (ДПР) и торона (ДПТ) изотопы RaA (28Ро), RaB (2l4Pb), RaC (2l4Bi) и ThB (212Pb), ThC (2l2Bi), соответственно. Источник … Словарь-справочник терминов нормативно-технической документации
Марны Верхней дпт. — (Haute Marne) во Франции, часть прежней Шампани и Бургундии. 6220 кв. км, 3 округа, 28 кантонов, 550 общин, 243533 жит. (1891 г.). Гл. г. Шомон. На Ю Лангрское плато (до 520 м), водораздел между Сенским, Рейнским и Ронским бассейнами. Из рек… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Ош, дпт. Жер — (Auch) гл. гор. франц. дпт. Жер на левом берегу р. Жер. Собор XV стол. с красивой живописью на окнах; 12375 жит. Фабрики бумагопрядильные, полотняные и шерстяные; винокуренные заводы, торговля скотом, хлебом вином. Библиотека, музей. О. древний… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Автомобиль диагностики пожарной техники (А ДПТ) — 2.26. Автомобиль диагностики пожарной техники (А ДПТ) пожарный автомобиль, оборудованный техническими средствами оценки технического состояния пожарной техники и предназначенный для доставки личного состава и оборудования к месту проведения… … Словарь-справочник терминов нормативно-технической документации
Принцип работы двигателя постоянного тока
Принцип работы двигателя постоянного тока основан на использовании явления электромагнитного взаимодействия (правило левой руки).
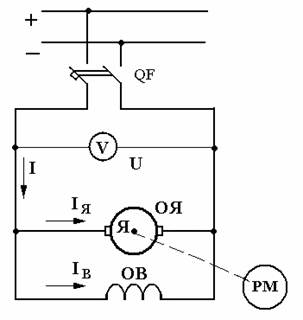
Для запуска двигателя постоянного тока обе его обмотки – обмотка возбуждения (ОВ) и обмотка якоря (ОЯ) с помощью рубильника, пускателя или другой пусковой аппаратуры включается в питающую сеть постоянного тока на номинальное напряжение U = U ном .
Протекающий по обмотке возбуждения ток возбуждения I В создаёт в статоре магнитный поток возбуждения Ф В , пронизывающий обмотку якоря.
Протекающий по обмотке якоря ток якоря I Я взаимодействует с магнитным потоком возбуждения статора Ф В , в результате чего возникают электромагнитные силы F, действующие на проводники якоря и создающие вращающий электромагнитный момент
М = cM Ф В I Я .
NB. cM — константа момента, определяемая конструкцией электродвигателя.
Под действием вращающего электромагнитного момента М якорь двигателя приходит во вращение и по окончании разгона ротор вращается с частотой
n = ( U – R Я I Я ) / сЕ Ф В .
NB. сЕ — константа ЭДС, определяемая конструкцией электродвигателя;
RЯ IЯ — падение напряжения в обмотке якоря.
 При
вращении ротора двигателя проводники
обмотки якоря пересекают магнитные
силовые линии потока возбуждения статора
Ф В в результате чего в обмотке якоря
наводится ЭДС (правило правой руки)
При
вращении ротора двигателя проводники
обмотки якоря пересекают магнитные
силовые линии потока возбуждения статора
Ф В в результате чего в обмотке якоря
наводится ЭДС (правило правой руки)
Е = сЕ Ф В n .
Наведённая в обмотке якоря ЭДС E направлена против приложенного к якорю напряжения (противо-ЭДС) и работа двигателя описывается уравнением электрического равновесия
U = E + RЯ IЯ .
При этом ток, потребляемый якорем двигателя из сети, или рабочий ток двигателя определяется уравнением
IЯ = (U — E)/ RЯ
Электрическая схема двигателя постоянного тока с параллельным возбуждением (РМ — рабочая машина)
30. Основные характеристики электродвигателей постоянного тока. Способы пуска и регулирования частоты вращения. Реверсирование и способы электрического торможения электродвигателей постоянного тока.
Основные характеристики двигателя постоянного тока с параллельным возбуждением
Свойства двигателей постоянного тока в основном определяются способом питания обмотки возбуждения. В связи с этим различают двигатели с независимым, параллельным, последовательным и смешанным возбуждением. В настоящее время в промышленности наиболее широкое применение получили двигатели с параллельным возбуждением.
В двигателе с параллельным возбуждением обмотка возбуждения подключена к питающей сети параллельно с обмоткой якоря. В цепь обмотки возбуждения последовательно включается регулировочный реостат RРР, а в цепь якоря — пусковой RПР или регулировочный R* реостат. Характерной особенностью двигателя является то, что ток возбуждения IB не зависит от тока якоря IЯ (тока нагрузки), т. е. при неизменном сопротивлении в цепи обмотки возбуждения, ток возбуждения постоянен IB = const.
Поэтому, пренебрегая размагничивающим действием реакции якоря, можно считать, что магнитный поток двигателя не зависит от нагрузки Ф = ФВ = const.