


Общие характеристики датчиков | RuAut
Выполняющий измерительное преобразование датчик работает в реальных производственных условиях эксплуатации, зачастую весьма тяжелых, связанных с высокими давлениями и температурами при влиянии агрессивных сред. На датчик одновременно воздействует большое число параметров. Среди этих параметров только один является измеряемой величиной, а все остальные представляют собой внешние параметры, характеризующие производственную среду. Эти внешние параметры являются в данном случае помехами. Каждый датчик должен на фоне помех наилучшим образом реагировать на измеряемую входную величину, вырабатывая соответствующую выходную величину или код выходной величины. При построении датчиков используются различные физические принципы, которые в значительной степени определяют области рационального применения того или иного датчика.
Параметрический датчик изменяет какой-либо из своих параметров под воздействием самой измеряемой величины и требует подключения к какому-либо внешнему источнику энергии.
Генераторный датчик сам генерирует выходной сигнал и не требует подключения к внешнему источнику энергии.
В качестве примеров датчиков такого рода можно назвать различные пьезоэлектрические датчики давления или тахогенераторные датчики скорости вращения. К параметрическим датчикам относятся:
- резистивные;
- индуктивные;
- трансформаторные;
- емкостные.
К генераторным датчикам относятся:
- термоэлектрические;
- индукционные;
- пьезоэлектрические;
- фотоэлектрические.
Функция преобразования датчика — это зависимость выходной величины данного измерительного преобразователя от входной, задаваемая либо аналитическим выражением, либо графиком, либо таблицей.
Чувствительность датчика — это именованная величина, показывающая, насколько изменится выходная величина при изменении входной величины на одну единицу. Для термопары единицей чувствительности будет мВ/К (милливольты на 1 градус Кельвина), для регулируемого электродвигателя — обороты в секунду на 1 вольт и т.д.
Разрешающая способность преобразования — это наименьшее изменение входного сигнала, которое может быть измерено преобразователем.
Воспроизводимость является мерой того, насколько близки друг к другу результаты измерений одной и той же физической величины.
Прецизионность является мерой того, насколько близки друг к другу результаты аналогичных измерений.
Точность (погрешность) измерения показывает, насколько показанное датчиком значение параметра близко к его истинному значению. Обычно точность задается в процентах от полной шкалы измерительного прибора и в результате представляет собой некоторую абсолютную величину.
Если прибор используется не по назначению, то возникают ошибки применения. В большинстве случаев при измерении механических величин, нагрузка воспринимается не самим преобразователем, а упругим элементом, который под воздействием измеряемой величины деформируется. Входной величиной в таком случае может быть сосредоточенная сила, крутящий момент, давление газа или жидкости и пр. Выходным сигналом может быть как непосредственно воспринимаемая человеком информация, так и электрический параметр. Различают статическую и динамическую характеристики датчика. Под статической характеристикой датчика понимают зависимость между установившимися значениями входной и выходной величин. Под динамической характеристикой датчика понимают поведение выходной величины во время переходного процесса в ответ на мгновенное (ступенчатое) изменение измеряемой входной величины. Если в статической характеристике датчика строится зависимость только между значением выходной величины Y в ответ на
зменение входной величины X, то в динамической характеристике датчика участвует параметр времени t и такая характеристика представляет собой зависимость вида Y= Y(t). Очевидно, что установившееся значение выходной величины датчика представляет собой то значение, которое приобретает его выходная величина после окончания всех переходных процессов, т.е. при t стремящимся к бесконечности. Зависимость между установившимися значениями входной и выходной величин применительно к датчикам называется тарировочной кривой. Различные виды статических характеристик измерительных датчиков с пропорциональным выходом приведены на рисунке.
На рисунке «а» приведена идеализированная статическая характеристика такого датчика. Нулевому значению входной величины в этом случае соответствует нулевое значение величины на выходе.
На рисунке «б» приведена идеализированная статическая характеристика датчика с зоной нечувствительности. У такого датчика изменение входной величины до значения ΔX, называемого порогом чувствительности, не ведет к появлению какого-либо сигнала на выходе. Лишь после того как окажется, что X> ΔХ, выходная величина будет расти, начиная от нуля, пропорционально изменению входной величины.
На рисунке «в» приведена идеализированная статическая характеристика датчика с зоной нечувствительности и насыщением выхода. У такого датчика, после достижения порога чувствительности выходная величина растет пропорционально росту входной величины, но до некоторого предельного значения ΔY, которое называется значением насыщения выходной величины. После того как окажется, что Y> ΔY, дальнейший рост входной величины X не приводит ни к какому росту У.
Наконец, на рисунке «г» приведена идеализированная статическая характеристика датчика с зоной нечувствительности на входе, с насыщением на выходе и с петлей гистерезиса. Гистерезисом называется различие между характером соответствия выходной и входной величин при прямом и обратном ходе изменения входной величины. Практически это выражается в том, что значение выходной величины при возрастании входной величины не совпадает с ее же значениями при убывании входной величины, а следовательно, при наличии гистерезиса чувствительность датчика при «прямом» и «обратном» ходах неодинакова. Заметим, что значение выходной величины при возрастании входной величины может как «опережать», так и «отставать» по сравнению с ее же значениями при убывании входной величины. В первом случае говорят о положительном гистерезисе, а во втором — об отрицательном. Абсолютная величина разницы в значениях X при возрастании и убывании входной величины, при которых на выходе имеет место одно и тоже значение, называется шириной петли гистерезиса. Если ширина петли гистерезиса настолько велика, что тарировочная кривая датчика заходит в область отрицательных значений входной величины, то это означает, что Y= 0 при X < 0, а при X =0 имеет место Y> 0. В таком случае говорят, что данный элемент обладает «памятью», так как на его выходе остается ненулевое значение и после того, как на его входе установится нулевое значение. Но это будет иметь место лишь в том случае, если перед этим величина на входе осуществила цикл возрастания с последующим убыванием хотя бы до нуля. Если же такого цикла на входе не происходило, то на выходе датчика будет продолжать сохраняться нулевое значение. Иными словами, наблюдая за состоянием выхода датчика в данный момент, можно сделать заключение о том, что происходило на его входе в предыдущие моменты. Это и есть то, что принято называть «памятью». Однако в реальной жизни практически не существует датчиков с идеализированной пропорциональной (линейной) зависимостью между значениями выходной и входной величин. Это значит, что приращение выходной величины в ответ на единичное приращение входной величины не является постоянным во всем интервале изменения измеряемой величины. Может создаться такая ситуация, когда в начале изменения входной величины произошедшие в ней изменения будут приводить к существенным изменениям выходной величины, а в конце изменения входной величины произошедшие в ней изменения будут приводить к малым изменениям выходной величины. Может иметь место и обратная картина.
В ряде случаев для удобства дальнейшего анализа фактическая нелинейная статическая характеристика датчика в определенных пределах измерения и с определенным влиянием на показания этого датчика может быть приближенно заменена неким линейным эквивалентом. В определенных условиях такая операция является допустимой и тогда она носит название линеаризации. В ряде случаев нелинейный характер статической характеристики датчика не является вредным, а может быть эффективно использован для различных задач автоматизации. Примером такого рода, широко используемым в различных устройствах автоматизации, является датчик со статической характеристикой релейного типа. При возрастании входной величины, до того как она достигнет порога срабатывания, на выходе датчика будет наблюдаться нулевое значение выходной величины, а как только входная величина достигнет порога срабатывания, выходная величина сразу же («щелчком») достигнет своей максимальной величины и при дальнейшем возрастании входной величины возрастать больше не будет. Примером такого рода может служить так называемое двухпозиционное регулирование температуры в обычном домашнем холодильнике. Как только температура внутри холодильника достигнет заданной величины, датчик температуры, называемый термостататом и обладающий релейной характеристикой, включит электромотор, прокачивающий хладоагент (фреон). При понижении температуры электромотор отключается и температура внутри холодильника перестает понижаться. Ранее рассматривались статические характеристики таких датчиков, у которых входная величина, возрастая и убывая, оставалась тем не менее большей нуля. Как правило, это и имеет фактически место при изменениях параметров технологических процессов производства деталей машиностроения. Например, это характерно при измерении перемещений рабочих органов станков, давления в гидросистемах или температуры в закалочных печах. Однако в ряде случаев, например при измерении фактических отклонений размера детали от номинала, возможно отклонение измеряемой величины как в положительную, так и в отрицательную сторону. Выходная величина при этом может оказываться пропорциональной модулю изменения входной величины (или же зависящей от него нелинейно) как без гистерезиса, так и с гистерезисом.
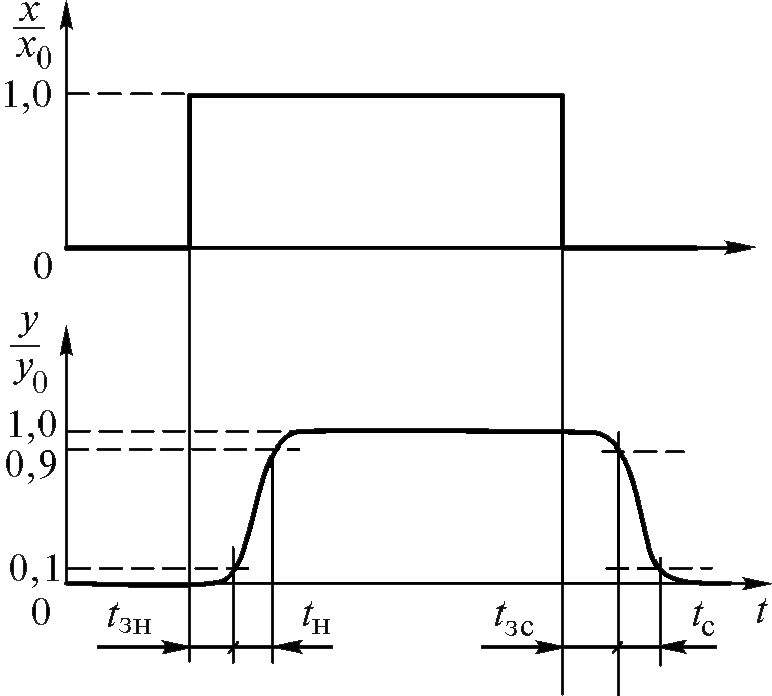
Обычно для сравнения при равных условиях динамических характеристик различных датчиков считают, что на их входы поступают воздействия одного и того же вида, а именно: ступенчатые. Это означает мгновенный «наброс» входной величины. Практически это соответствует, например, включению напряжения на электродвигатель либо помещению термопары в закалочную печь и т.д. Двигатель будет набирать обороты не мгновенно, а в соответствии с динамическими свойствами привода, в который он включен. Показания термопары также начнут отражать температуру в печи не мгновенно, а по мере разогрева спая этой термопары и т.д. Для динамических характеристик датчиков характерны три случая. Первый случай соответствует чистому запаздыванию в датчике, когда его выходная величина просто повторяет (в определенном масштабе) входную величину, запаздывая по отношению к ней на постоянную величину. Второй случай соответствует апериодическому характеру переходного процесса, когда выходная величина постепенно приближается к новому установившемуся значению монотонным образом (монотонно убывая или же монотонно возрастая). Третий случай соответствует колебательному характеру переходного процесса, когда выходная величина постепенно приближается к новому установившемуся значению, совершая за время переходного процесса одно или несколько колебаний, превышая на время новое значение выходной величины, а затем возвращаясь к нему. Динамические процессы в датчиках характеризуются показателями качества переходного процесса. К их числу относятся:
- время завершения переходного процесса;
- величина превышения в течение переходного процесса выходного параметра над его новым установившимся значением;
- число колебаний выходной величины за время завершения переходного процесса.
Используется также интегральный показатель качества переходного процесса, обычно представляющий собой подынтегральную площадь кривой переходного процесса. Для датчиков производственных параметров важными характеристиками являются также диапазон измерений, представляющий собой разность между допустимыми максимальным и минимальным установившимися значениями измеряемой величины, а также полоса пропускания, представляющая собой разность между максимальной и минимальной частотами изменения входной величины, для работы с которыми предназначен данный датчик. Что касается погрешностей измерений производственных параметров, неизбежно возникающих в любых практических системах автоматизации, то их принято классифицировать следующим образом:
- систематические;
- прогрессирующие;
- случайные;
- погрешности применения.
Источник: Шандров Б.В. Чудаков А.Д. Технические средства автоматизации
5.2. Основные характеристики датчиков
5.2.1. Погрешности измерений
Датчик в определенных условиях эксплуатации подвергается воздействию не только измеряемой величины, но и других физических величин, именуемых влияющими, к которым чувствителен датчик.
В идеальном случае имеет место связь
 ,
,
а фактически имеет место
 ,
(5.3)
,
(5.3)
где m – измеряемая величина;
gi – величины, влияющие на датчик.
Для уменьшения погрешности датчиков, очевидно, необходимо:
снизить значения влияющих величин giпутем соответствующей защиты датчика;
стабилизировать влияющие величины gi и градуировать датчик с учетом этих величин.
Случайные ошибки измерений приводят к разбросу результатов при повторении измерений.
Статистическая обработка результатов позволяет определить наиболее вероятные значения измеряемой величины и оценить пределы его погрешности.
Статистическую обработку осуществляют по выражениям:
—
среднее значение измеряемой величины 
 ;
(5.4)
;
(5.4)
 ,
(5.5)
,
(5.5)
где n — количество измерений.
Вероятность нахождения случайно измеряемой величины m в некотором диапазоне изменения находится по выражению
 ,
(5.6)
,
(5.6)
где  — плотность распределения величины
(плотность вероятности).
— плотность распределения величины
(плотность вероятности).
В случае нормального закона распределения [4] плотность определяется по зависимости:
 .
(5.7)
.
(5.7)
Наиболее
вероятная величина m равна  ,
а вероятность появления результатов
измерения в указанных ниже пределах
равна:
,
а вероятность появления результатов
измерения в указанных ниже пределах
равна:
 (5.8)
(5.8)
Очевидно,
чем меньше СКО  ,
тем выше сходимость результатов, а
отсюда можно ограничиться и меньшим
количеством измерений величиныm.
,
тем выше сходимость результатов, а
отсюда можно ограничиться и меньшим
количеством измерений величиныm.
5.2.2. Чувствительность датчиков
Чувствительность датчика S является определяющим параметром при выборе датчика.
Чувствительность определяется по зависимости:
 ,
(5.9)
,
(5.9)
где  — вариации сигнала на выходе датчика;
— вариации сигнала на выходе датчика;
 — изменение
измеряемой величины;
— изменение
измеряемой величины;
 — некоторое значение
измеряемой величины, вблизи которого
производится измерение.
— некоторое значение
измеряемой величины, вблизи которого
производится измерение.
Единицы измерения зависят от принципа работы датчика и природы измеряемой величины.
Например, для терморезистора размерностью является [Ом / 0С], а для термопары — [мкВ / 0С].
В зависимости от частоты изменений измеряемой величины существует два режима работы датчиков:
статический, если измеряемая величина постоянная или меняется медленно;
динамический, если измеряемая величина меняется быстро.
Отношение
величины на выходе  к соответствующей измеряемой величине
к соответствующей измеряемой величине называютстатическим
коэффициентом преобразования
называютстатическим
коэффициентом преобразования
 ,
(5.10)
,
(5.10)
где  — рабочая точка.
— рабочая точка.
Это
отношение  не зависит от рабочей точки и совпадает с чувствительностью
не зависит от рабочей точки и совпадает с чувствительностью  только в том
случае, когда
статическая характеристика является
прямой, проходящей через начало координат.
только в том
случае, когда
статическая характеристика является
прямой, проходящей через начало координат.
В наиболее
общей форме связь между величинами  и
и представляют собойдифференциальные
уравнения.
представляют собойдифференциальные
уравнения.
Зависимость
чувствительности в динамическом режиме
от частоты f,
т.е.  ,
являетсячастотной
характеристикой датчика.
,
являетсячастотной
характеристикой датчика.
Частотные характеристики связаны с порядком дифференциального уравнения, описывающего работу датчика.
Частотная характеристика датчика первого порядка
Такой датчик описывается дифференциальным уравнением вида
 ,
(5.11)
,
(5.11)
где A, B – постоянные коэффициенты.
Если
измеряемая величина  меняется по гармоническому закону вида
меняется по гармоническому закону вида
 ,
(5.12)
,
(5.12)
где  — амплитуда величины, а
— амплитуда величины, а — круговая частота, то выходная величина
датчика
— круговая частота, то выходная величина
датчика может быть определена по зависимости
может быть определена по зависимости
 ,
(5.13)
,
(5.13)
где  — амплитуда выходной величины датчика,
— амплитуда выходной величины датчика, — сдвиг фазы выходного сигнала датчика
относительно входного.
— сдвиг фазы выходного сигнала датчика
относительно входного.
В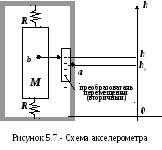 комплексной форме вместо выражений(5.12) и (5.13)
соответственно имеем:
комплексной форме вместо выражений(5.12) и (5.13)
соответственно имеем:
 ,
(5.14)
,
(5.14)
 .
(5.15)
.
(5.15)
Частотная характеристика датчика второго порядка
В этом случае датчик описывается дифференциальным уравнением вида
 , (5.16)
, (5.16)
где A, B , С – постоянные коэффициенты.
Как пример в качестве такого датчика рассмотрим акселерометр, который служит для определения ускорений движения объекта.
Схема акселерометра представлена на рисунке 5.7, где M, R — масса и пружина.
Эта система помещена в корпус, в котором находится датчик положения и схема вывода наружу электрического сигнала, регистрирующего движение чувствительной массы относительно продольной оси корпуса.
Введем обозначения:
h0 – координата некоторой точки «а» корпуса;
h – текущее положение точки b массы, выбранной так, что положению покоя соответствует h= h0;
F — коэффициент силы вязкого трения, пропорциональной перемещению массы относительно корпуса;
C – коэффициент восстанавливающей силы пружины, пропорциональной перемещению массы M относительно корпуса.
Уравнение движения массы в общем виде можно записать
 .
(5.17)
.
(5.17)
Вторичный
преобразователь чувствителен только
к относительному перемещению  .
.
Тогда уравнение (5.17) можно переписать
 ,
(5.18)
,
(5.18)
где  — ускорение массы, направленное вдоль
оси акселерометра.
— ускорение массы, направленное вдоль
оси акселерометра.
Очевидно,
что при  в установившемся режиме имеет место
в установившемся режиме имеет место ,
(5.18)
,
(5.18)
т.е. перемещение массы пропорционально ее ускорению.
2. Общие свойства датчиков
К датчикам физических величин, преобразующих измеряемый параметр в электрический сигнал, применимы теоретические основы, изложенные в фундаментальных трудах В. Эрлера, К. Бриндли, А.М. Туричина, Л.А. Островского и др. Ниже дается обобщение некоторых определений, характеризующих общие свойства датчиков.
На датчик могут одновременно воздействовать различные физические величины (давление, температура, влажность, вибрация, магнитные и электрические поля и т.д.), но воспринимать он должен только одну величину, называемую естественной измеряемой величиной А [10].
Функциональную зависимость выходной величины В датчика от естественной измеряемой величины А в статических условиях, выраженную аналитически, таблично или графически, называют статической характеристикой датчика.
Статическая
чувствительность представляет собой
отношение малых приращений выходной
величины к соответствующим малым
приращениям входной величины в статических
условиях. По определению статическая
чувствительность равна  или, переходя
к пределу, будем иметь
или, переходя
к пределу, будем иметь
 (1)
(1)
Это соотношение является постоянным, когда выходная величина (выходной сигнал) представляет собой линейную функцию входной величины (входного сигнала). Если имеется нелинейная функция, то должны быть указаны точки, к которым относится данная чувствительность. В некоторых случаях чувствительность может быть представлена в виде наклона секущей между двумя характеристическими точками статической нелинейной характеристики.
Понятие статической чувствительности аналогично понятию коэффициента усиления, градиента, коэффициента чувствительности.
Чувствительность датчика – это, как правило, именованная величина с разнообразной размерностью, зависящей от природы входной и выходной величин. Например, для датчика давления крови размерностью чувствительности является отношение мкВ/мм.рт.ст. Понятие чувствительности можно распространить на динамические условия работы. При этом под чувствительностью подразумевают отношение скорости изменения выходного сигнала к соответствующей скорости входного сигнала
 . (2)
. (2)
В случае периодических, в частности синусоидальных, сигналов чувствительность может быть определена как отношение амплитуд выхода и входа.
Под порогом чувствительности датчика понимают минимальное изменение измеряемой величины (входного сигнала), вызывающее изменение выходного сигнала. Наиболее характерным показателем качества датчика является полный диапазон датчика, выражаемый отношением
 , (3)
, (3)
где Xн – естественный предел измерения; о – порог чувствительности датчика.
Для каждого типа датчиков существует практически достижимый предел величины Dд, определяемый принципом действия датчика и характеристиками чувствительного элемента.
Гистерезисом называют неоднозначность хода статической характеристики датчика при увеличении и уменьшении входной величины.
Для упругих элементов (мембраны, сильфоны, пружины) в понятие гистерезис включают также понятие «упругое последействие».
Гистерезис относится в общем случае к случайным погрешностям, так как его величина определяется не только значениями входной величины, но и временными характеристиками работы датчика. Гистерезис выражается в процентах
 ,
(4)
,
(4)
где Вmax – Bmin – изменение выходной величины в рабочих пределах.
Гистерезис возникает в датчиках из-за внутреннего трения в упругих элементах, трения в подвижных элементах, ползучести (например, в наклеиваемых тензодатчиках), магнитного гистерезиса и т.п.
Основной погрешностью датчика является максимальная разность между действительным значением выходного сигнала и его величиной, соответствующей истинному значению входного параметра. Эта разность определяется по статической характеристике датчика при нормальных условиях и обычно относится к разности предельных значений выходной величины
 . (5)
. (5)
Нормальными условиями эксплуатации датчика являются: температура окружающей среды +2510 С, атмосферное давление 10540000 Па (75030 мм рт.ст.), относительная влажность окружающего воздуха 6515 %, отсутствие вибрации и полей (кроме гравитационного).
Дополнительные погрешности датчика – это погрешности, вызываемые изменением внешних условий по сравнению с нормальными. Они выражаются в процентах, отнесенных к изменению неизмеряемого параметра (например, температурная погрешность 1 % на 5 С; погрешность от магнитного поля 0,5 % на 5 Э и т.д.).
Первичной погрешностью датчика называют отклонение его параметра от расчетного значения
 , (6)
, (6)
где P – первичная погрешность параметра Pij; (Pij)o – расчетное значение параметра Pij; i – индекс (номер) преобразователя; j – индекс (номер) параметра.
Первичная погрешность Pij датчика вызывает отклонение выходной величины Вi от ее расчетного значения при заданном значении входной величины Аi. Это отклонение принято называть частной погрешностью датчика
 ; (7)
; (7)
. (8)
Суммарная погрешность датчика определяется как сумма частных погрешностей. Способ суммирования определяется природой первичных погрешностей.
При систематических первичных погрешностях частная погрешность датчика определяется по зависимости
 (9)
(9)
Если первичные погрешности случайны, то предельное значение погрешности датчика можно определить квадратичным суммированием предельных значений частных погрешностей
 (10)
(10)
Практическая оценка погрешности измерений различных физических параметров часто усложняется большим числом одновременно действующих независимых факторов, вызывающих частные погрешности. В качестве примера рассмотрим измерение давления крови. Здесь имеем следующие группы основных независимых факторов, вносящих наиболее значительные погрешности измерений:
погрешность, вносимая нелинейностью амплитудной характеристики канала давления из-за несоответствия условий калибровки аппаратуры и условий ее применения на практике (по температуре окружающей среды, давлению воздуха, наводкам и пр.), B1 = 5 %;
погрешность, вносимая непрямолинейностью амлитудно–частотной характеристики и неправильностью при ее снятии, B2 = 5 %;
погрешность за счет дрейфа нуля, B3 3 %;
погрешность, вносимая при обработке кривой записи давления, B4 5 %.
Все эти погрешности представляют собой предельные значения соответствующих систематических погрешностей для данной аппаратуры и данного эксперимента. Сложность заключается в том, что численные значения этих погрешностей, как правило, неизвестны.
Динамическая характеристика датчика определяет параметр выходной величины при быстрых изменениях входной величины [10].
Чувствительность (техника) — Википедия
Материал из Википедии — свободной энциклопедии
Чувстви́тельность — способность объекта реагировать определённым образом на определённое малое воздействие, а также количественная характеристика этой способности[1].
- Параметрическая чувствительность — чувствительность объекта к отклонениям параметров его основных частей от номинальных значений основных характеристик объекта.
- Чувствительность громкоговорителя — величина, характеризующая звуковое давление, создаваемое громкоговорителем при подаче на него сигнала с определённой электрической мощностью. Чувствительность громкоговорителя определяется путём измерения звукового давления на расстоянии 1 м от головки по основной оси при поданном на вход громкоговорителя сигнале мощностью 1 Вт.
- Чувствительность громкоговорителя — отношение среднего звукового давления, развиваемого громкоговорителем в номинальном диапазоне частот на рабочей оси на расстоянии 1 м от рабочего центра, к корню квадратному из подводимой электрической мощности.
- Чувствительность микрофона — отношение напряжения на выходе микрофона к воздействующему на него звуковому давлению при заданной частоте (как правило, 1000 Гц), выраженное в милливольтах на паскаль (мВ/Па). Чем больше это значение, тем выше чувствительность микрофона. Чувствительность микрофона измеряется также в децибелах (дБ) относительно уровня в 1 В/Па и определяется выражением 20lg(V1/V0), где V0=1 В/Па. Таким образом, чувствительность 2 мВ/Па соответствует 20lg(2/1000) = −54 дБ, а 12 мВ — 20lg(12/1000) = −38 дБ (иногда «минус» и опорный уровень в 1 В/Па в публикуемых технических характеристиках опускают). То есть, чем ближе к нулю значение чувствительности в децибелах, тем выше чувствительность микрофона.
- Чувствительность звукоснимателя — отношение амплитуды выходного напряжения звукоснимателя на номинальной нагрузке при частоте 1000 Гц к амплитуде колебательной скорости записи.
Чувствительность электронно-лучевой трубки[править | править код]
Чувствительность по отклонению — отношение смещения электронного пятна на экране ЭЛТ к вызвавшему его изменению отклоняющего тока или напряжения.
Чувствительность порогового элемента[править | править код]
Чувствительность порогового элемента — минимальный уровень сигнала на входе порогового элемента, приводящий к его срабатыванию.
Чувствительность радиоприёмника — способность радиоприёмника принимать слабые по интенсивности радиосигналы и количественная мера этой способности[2].
- Чувствительность, ограниченная шумами — чувствительность радиоприёмника, определяемая минимальным уровнем радиосигнала на его входе при заданном отношении уровней полезного сигнала и шума и заданном уровне полезного сигнала на выходе радиоприёмника[2].
- Чувствительность, ограниченная усилением — чувствительность радиоприёмника, определяемая минимальным уровнем радиосигнала на его входе, необходимым для получения заданного уровня сигнала на выходе радиоприёмника[2].
- Пороговая чувствительность — чувствительность радиоприёмника, определяемая минимальным уровнем радиосигнала на его входе при равных уровнях полезного сигнала и шума на выходе радиоприёмника[2].
В качестве заданного уровня сигнала на выходе радиоприемника могут быть номинальные мощность или напряжение на сопротивлении нагрузки радиоприемника.
- Пороговая чувствительность приемного модуля СВЧ — мощность сигнала на входе приемного модуля СВЧ, при которой на его выходе в линейном режиме работы мощность сигнала равна мощности шума в заданной полосе частот[3].
Чувствительность системы автоматического управления[править | править код]
Чувствительность системы автоматического управления — зависимость динамических свойств системы автоматического управления (САУ) от изменения (вариации) её параметров и характеристик. Под вариацией параметров понимают любые отклонения их от значений, принятых за исходные; эти отклонения могут быть известны полностью и описаны некоторыми функциями времени или же известны только с точностью до принадлежности к определенному классу (например, ограничены по модулю). Вариации параметров могут быть конечные или бесконечно малые, при этом порядок дифференциального уравнения, описывающего их, может оставаться неизменным или изменяться. В качестве прямых оценок чувствительности принято использовать т. н. функции чувствительности, играющие большую роль в количественной оценке степени влияния вариаций параметров системы на её динамического свойства.
Чувствительность средства измерений[править | править код]
Чувствительность средства измерений — свойство средства измерений, определяемое отношением изменения выходного сигнала этого средства к вызывающему его изменению измеряемой величины.
- Абсолютная чувствительность — отношение изменения выходного сигнала к абсолютному изменению измеряемой величины.
- Относительная чувствительность — отношение изменения выходного сигнала к относительному изменению измеряемой величины.
- Порог чувствительности средства измерений (пороговая чувствительность) — характеристика средства измерений в виде наименьшего значения изменения физической величины, начиная с которого может осуществляться её измерение данным средством.
Чувствительность телевизионной системы[править | править код]
Чувствительность телевизионной системы — величина, обратная минимальной освещенности объекта, при которой обеспечивается передача изображения с заданными качественными параметрами.
Чувствительность усилителя — чувствительность, определяемая минимальным напряжением, током или мощностью на входе электронного усилителя, при которых обеспечивается заданное превышение полезного сигнала над шумами усилителя или заданные напряжение, ток или мощность в его нагрузке.
Чувствительность фотоприёмника — отношение изменения электрической величины на выходе фотоприёмника, вызванного падающим на него излучением, к интенсивности этого излучения.
- Пороговая чувствительность — минимальный поток излучения, который может быть обнаружен на фоне собственных шумов.
- Интегральная чувствительность — чувствительность фотоприёмника к немонохроматическому излучению заданного спектрального состава.
- Дифференциальная чувствительность — чувствительность фотоприёмника, определяемая отношением малых приращений измеряемого параметра фотоприёмника и потока излучения.
- Монохроматическая чувствительность — чувствительность фотоприёмника к монохроматическому излучению.
- Интегральная чувствительность фотокатода — отношение фототока при заданных условиях работы фотокатода к вызывающему этот ток потоку излучения.
- Спектральная чувствительность фотокатода — отношение фототока, обусловленного потоком излучения, лежащего в достаточно узком интервале длин волн около заданной длины волны, к энергии этого потока.
- Световая анодная чувствительность ФЭУ — отношение анодного фототока к вызывающему его световому потоку при номинальных потенциалах электродов.
- Спектральная чувствительность ФЭУ — равна спектральной чувствительности фотокатода, умноженной на коэффициент усиления умножительной системы.
Светочувствительность фотоматериала — способность фотоматериала регистрировать световое излучение, образовывать почернение под действием света.
- Чувствительность информационная — характеристика светочувствительных слоев, выражающая их способность не только зарегистрировать отдельный оптический сигнал (или единицу оптической информации), но и сделать его отличимым от других, записанных рядом с ним.
- Чувствительность цифровой камеры — величина светочувствительности в системе ISO, характеризующая соотношение между экспозицией, получаемой светочувствительной матрицей, и характером получаемого изображения.
- Экспонометры цифровых фотоаппаратов градуируются в единицах чувствительности, эквивалентных единицам ISO, применяемым для фотоматериалов. Большие значения ISO позволяют вести съёмку с короткими выдержками и без дополнительных источников света и штатива. Рост чувствительности приводит, как правило, к снижению качества изображения.
- Светочувствительность видеокамер — величина, аналогичная светочувствительности цифровых фотоаппаратов, но выражается не в единицах ISO, а в минимальной освещённости, при которой получается изображение с допустимым уровнем шумов. Выражается в люксах и децибелах.
- Спектральная чувствительность — светочувствительность фотоматериала по отношению к монохроматическому излучению определенной длины волны
- Эффективная чувствительность фотобумаги — светочувствительность фотобумаги, используемая для определения её оптимальной экспозиции.
Чувствительность масс-спектроскопии[править | править код]
Чувствительность в масс-спектроскопии — величина, показывающая какое количество вещества нужно ввести в масс-спектрометр для того, чтобы его можно было детектировать.
Книги[править | править код]
- Методы теории чувствительности в автоматическом управлении — Л., 1971
- Томович Р., Вукобратович М., Общая теория чувствительности, пер. с сербск. и англ. — М., 1972
- Чистяков Н. И., Сидоров В. М., Радиоприёмные устройства — М., 1974
- Миз К., Джеймс Т., Теория фотографического процесса, пер. с англ. — Л., 1973
- Рывкин С. М., Фотоэлектрические явления в полупроводниках — М., 1963
- Берковский А. Г., Гаванин В. А., Зайдель И. Н., Вакуумные фотоэлектронные приборы — М., 1976
Нормативно-техническая документация[править | править код]
- РМГ 29-2013 ГСИ. Метрология. Термины и определения[4]
Тема 1. Основы проектирования информационных устройств
План занятия
Основные понятия и определения
Датчики и их характеристики
Основы теории измерений
Основные понятия и определения
Чувствительным элементом (ЧЭ) или первичным преобразователем, называется простейший элемент информационной системы, изменяющий свое состояние под действием внешнего возмущения. Примерами ЧЭ являются фотодиод, катушка индуктивности, тензорезистор.
Датчик (измерительный преобразователь) представляет собой устройство, которое под воздействием измеряемой физической величины выдает эквивалентный сигнал (обычно электрической природы –– заряд, ток, напряжение или частоту), являющийся однозначной функцией измеряемой величины.
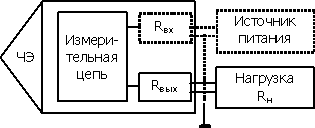
Простейший датчик состоит из одного или нескольких первичных преобразователей и измерительной цепи. Большинство датчиков имеет внешний источник питания, а в качестве нагрузки может быть использован усилитель, измерительный прибор, блок сопряжения с компьютером и т. п.
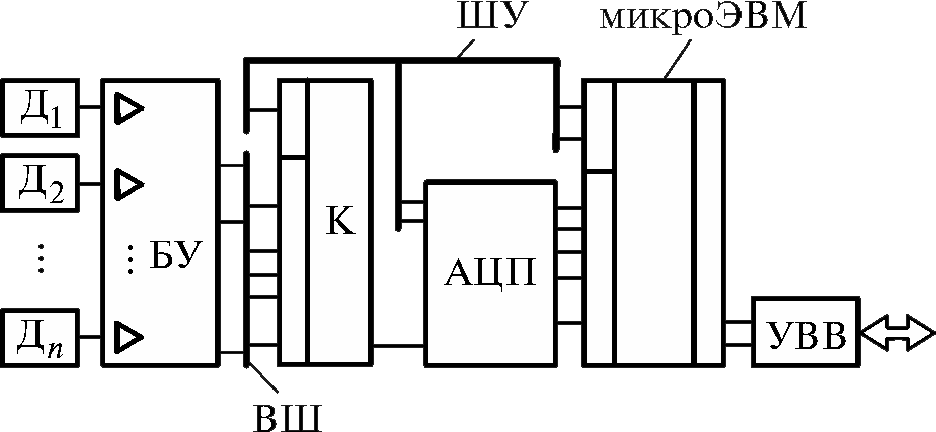
Информационная система –– система передачи и приема информации, включающая источник информации, передатчик, канал связи, приемник информации и источник помех.
Состав информационной (сенсорной) системы

Генераторные датчики являются источником непосредственно выдаваемого электрического сигнала. Это – термоэлектрические преобразователи; устройства, в основе функционирования которых лежат пиро- и пьезоэлектрические эффекты, явление электромагнитной индукции, фотоэффект, эффект Холла и др.
В параметрических датчиках под воздействием измеряемой величины меняются некоторые параметры выходного импеданса.
Импеданс датчика обусловлен геометрией и размером ЧЭ, а также электромагнитными свойствами материала:
удельным электросопротивлением ρ,
относительной магнитной проницаемостью μ,
относительной диэлектрической проницаемостью.
Унифицированным преобразователем — трансмиттером — является датчик, имеющий нормированный диапазон сигнала на выходе. Международный стандарт DIN/VDE 26001, а также ГОСТ 26.011-80 устанавливает допустимые диапазоны унифицированных сигналов, а также вводят ограничения на величину сопротивления источников и приемников этих сигналов
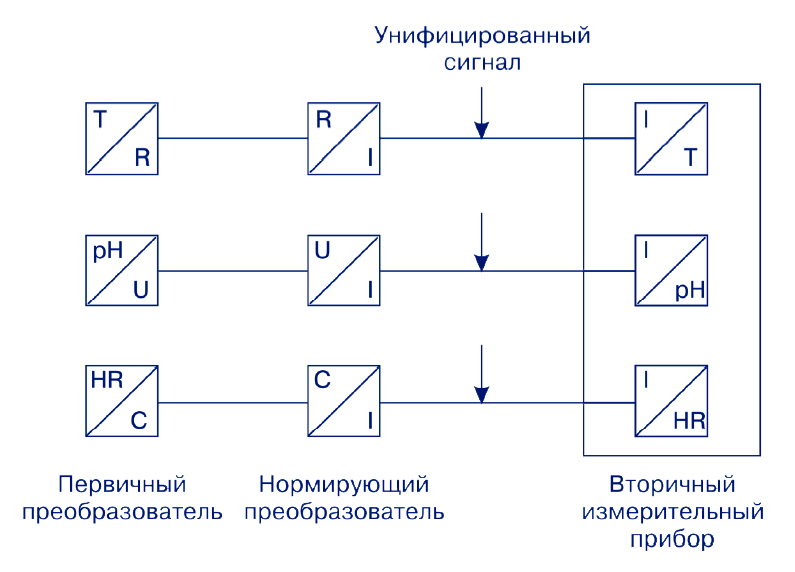

В робототехнике среди стандартных выходных сигналов унифицированных датчиков наиболее популярен сигнал напряжения 0 … 10 В, в промышленности — токовый сигнал 4 … 20 мА.
Адаптивной называется система, которая может приспосабливаться к изменению внутренних и внешних условий. Простейшей адаптивной системой можно считать систему с обратной связью — следящую систему.
Датчики и их характеристики
Математическое (или графическое) описание связи изменения выходного сигнала датчика в зависимости от изменения входного называется функцией преобразования датчика
Ф
 ункция
преобразования датчика может быть как
линейной, так и нелинейной
ункция
преобразования датчика может быть как
линейной, так и нелинейной
Избирательностью k-го канала измерительной системы называется выражение вида:
Для линейных систем избирательность характеризуется коэффициентом влияния каналов:

Наряду с избирательностью часто используют термин селективность –– способность датчика выделять полезный сигнал на фоне посторонних воздействий (помех). В радиотехнике наиболее распространена частотная селективность.
Чувствительность датчика — свойство средства измерений, определяемое отношением изменения выходного сигнала этого средства к вызывающему его изменению измеряемой величины.
Абсолютная чувствительность — отношение изменения выходного сигнала к абсолютному изменению измеряемой величины.
Относительная чувствительность — отношение изменения выходного сигнала к относительному изменению измеряемой величины.
Порог чувствительности (пороговая чувствительность) — характеристика датчика в виде наименьшего значения изменения физической величины, измеряемое данным средством.
Динамическую чувствительность можно определить лишь в случае, когда измеряемая величина x является периодической функцией и выходной сигнал y имеет ту же периодичность, что и x.
Обычно измеряемый сигнал x не является гармонической функцией и сложным образом изменяется во времени. В этом случае функцию y(t) раскладывают в ряд Фурье:

Зависимость динамической чувствительности от частоты сигнала представляет собой частотную характеристику датчика.
Датчики первого порядка (например, свето- и фотодиоды) в своей структуре не содержат колеблющихся частей и характеризуются граничной частотой fг:

Датчики второго порядка (например, пьезоэлектрические акселерометры) содержат в своей структуре колеблющиеся элементы и характеризуются собственной частотой f0 и коэффициентом затухания:
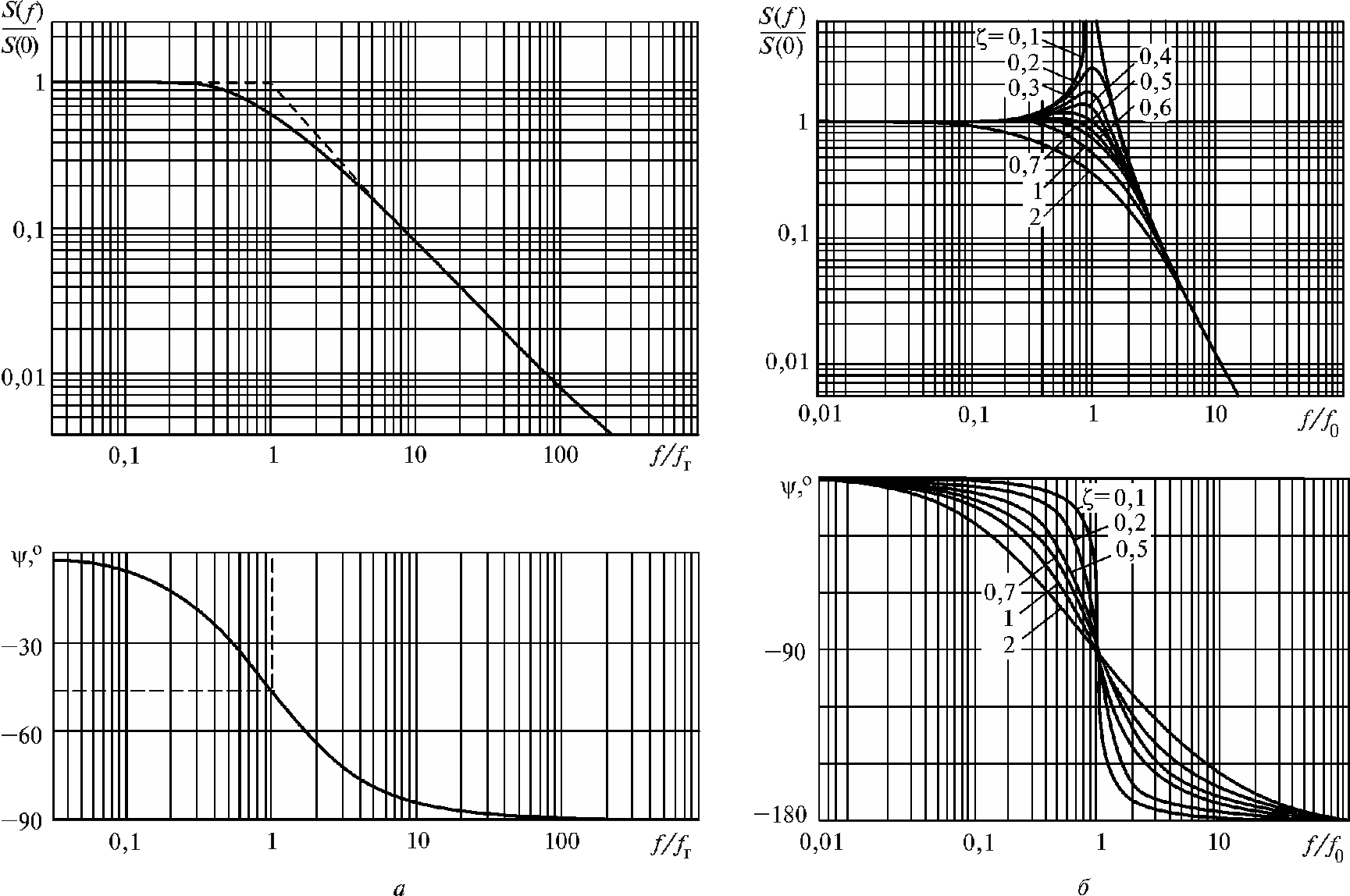
Частотные характеристики датчиков первого и второго порядков:
Зависимость амплитуды датчика от его частоты представляет собой его амплитудно-частотную характеристику. Для датчиков первого порядка наклон АЧХ составляет -20 дБ/дек, для датчиков второго порядка — 40 дБ/дек
П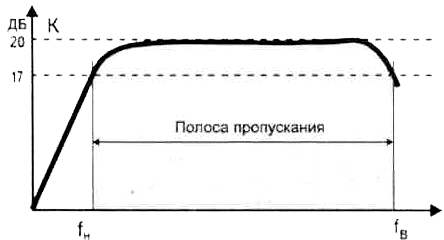 олоса
пропускания В датчика –– это диапазон частот, в
котором ординаты АЧХ уменьшаются
относительно их максимального значения
не более чем на 3 дБ
олоса
пропускания В датчика –– это диапазон частот, в
котором ординаты АЧХ уменьшаются
относительно их максимального значения
не более чем на 3 дБ

Для датчика первого порядка

Для датчика второго порядка
Обычно диапазон частот входных воздействий датчика выбирают либо значительно ниже, либо выше собственной частоты f0
Датчик называется линейным в некотором диапазоне измеряемой величины x, если его чувствительность не зависит от значения этой величины.
В динамическом режиме линейность датчика зависит от чувствительности в статическом режиме S(0) и от параметров частотной характеристики fг, f0 и z.
На практике линейность датчика определяют по его градуировочной характеристике. Эту характеристику снимают экспериментальным путем, причем распределение экспериментальных данных аппроксимируют уравнением некоторой прямой, используя метод наименьших квадратов.

Основные параметры градуировочной характеристики:
гистерезис (разность значений выходного сигнала для одного и того же значения входной величины при ее возрастании и убывании),
м
 ертвая
зона (нечувствительность в некотором
диапазоне входных величин)
ертвая
зона (нечувствительность в некотором
диапазоне входных величин)насыщение (значительное отклонение от линейности при значениях входной величины, большей некоторого значения).
 ертвая
зона (нечувствительность в некотором
диапазоне входных величин)
ертвая
зона (нечувствительность в некотором
диапазоне входных величин)Быстродействие –– это параметр датчика, позволяющий оценить, как выходной сигнал следует во времени за изменением измеряемой величины
Параметр, используемый для количественного описания быстродействия, называется временем установления tуст –– это интервал времени, который должен пройти после приложения ступенчатого сигнала, для того чтобы сигнал на выходе датчика достиг уровня, отличающегося от входного не более чем на заданную величину e.
П ереходная
функция h(t)
— в теории управления реакция динамической
системы на входное воздействие в виде функции
Хевисайда.
Зная переходную функцию (характеристику),
можно определить реакцию системы y(t)
на произвольное входное воздействие x(t)
с помощью интеграла Дюамеля-Карсона:
ереходная
функция h(t)
— в теории управления реакция динамической
системы на входное воздействие в виде функции
Хевисайда.
Зная переходную функцию (характеристику),
можно определить реакцию системы y(t)
на произвольное входное воздействие x(t)
с помощью интеграла Дюамеля-Карсона:
Электрическим аналогом датчика можно считать последовательный RLC-контур

Время установления tуст датчика можно определить по графику переходного процесса
Для датчиков первого порядка

Для датчиков второго порядка

На быстродействие датчика также влияют факторы, не связанные с ним непосредственно, например окружающая среда.
Д екремент
затухания d
(не путать с коэффициентом
затухания z)
–– величина, обратная числу колебаний,
по истечении которых максимальное
значение амплитуды убывает в е раз:
екремент
затухания d
(не путать с коэффициентом
затухания z)
–– величина, обратная числу колебаний,
по истечении которых максимальное
значение амплитуды убывает в е раз:
Чувствительность — датчик — Большая Энциклопедия Нефти и Газа, статья, страница 1
Чувствительность — датчик
Cтраница 1
Чувствительность датчика в сильной степени зависит от рода газа. [1]
Чувствительность датчика вследствие производственных допусков различна и определяется для каждого датчика отдельно. [2]
Чувствительность датчика определяет минимальное значение сообщения, которое еще может быть преобразовано в напряжение. Она определяется внутренними шумами датчика и, следовательно, зависит от физических эффектов, на которых основана работа датчика, а также от температуры. Чувствительность датчика зависит от полосы частот, в которой она определяется. [3]
Чувствительность датчика показывает, насколько интенсивно изменяется выходная величина ( уровень информационного сигнала) при изменении входной контролируемой величины. [4]
Чувствительность датчика повышается при использовании холодного катода цилиндрической или конической формы. [6]
Чувствительность датчика определяется типом струны, ее длиной и статическим натяжением, которые выбираются при проектировании датчика. В некоторых случаях чувствительность датчика достигает такой величины, что максимальное перемещение первичного преобразователя датчика составляет всего несколько сотых долей микрона или менее 0 05 % от максимального диапазона измеряемых перемещений. [7]
Чувствительность датчика с петлевой намоткой ( см. рис. 1, а) к поперечным деформациям определяется наличием закруглений на концах петель. Возникающая при этом погрешность возрастает с уменьшением базы. [8]
Чувствительность датчика составляла 0 9 мм вод. ст. Под воздействием давления в потоке мембрана прогибалась и менялось электрическое сопротивление тензодатчиков, приклеенных к ней. [10]
Чувствительность датчика — — может быть вычислена по характеристике как тангенс угла между касательной к кривой UH ( b) и осью В. [11]
Чувствительность датчика зависит от расстояния между пластинами. Первые эксперименты были выполнены с использованием этого датчика. [13]
Чувствительность датчика обычно трудно рассчитать с необходимой точностью. Поэтому датчики, чувствительные к массе, лучше всего калибровать после их монтажа в установке, используя для этого независимые методы измерения толщины пленки на подложке. [14]
Чувствительность датчиков я скорости зависит от ориентация их нктей в потоке. [15]
Страницы: 1 2 3 4
17. Методы компенсации систематических погрешностей
Суть не в том,чтобы устранить причину,а оценивается величина погрешности и автоматически вносится стабилизация. Когда нужно корректировать температ. погрешность,используют дифференциальные системы.
-устранить причину погрешности
-оценить величину погрешности, закономерность появления и внести поправку в результат измерения.
Наиболее распространена температурная погрешность.
18. Чувствительность датчика.
Чувствительность — отношение изменения сигнала на выходе измерительного прибора, датчика к вызывающему его изменению измеряемой величины. Размерная величина, измеряемая в разных величинах. Чувствительность измерительного прибора, состоящего из нескольких, последовательно соединенных элементов, находится произведением чувствительностей всех элементов. Чувствительность датчика зависит от вида его статической характеристики, которой является аналитически или графически выраженная зависимость выходной величины от входной. Желательно, чтобы характеристика была линейной, непрерывной и без гистерезиса (с однозначным выходным сигналом). У датчиков с линейной характеристикой чувствительность постоянна во всем диапазоне измерений, что дает возможность делать шкалу прибора равномерной.
S = ∆y/∆x
Для линейной части функции преобразования чувствительность датчика постоянна. Если функция нелинейна,то чувствительность меняется,нужно делить на диапазон.
S = dy/dx
Чувствительность датчика характеризует степень совершенства процесса преобразования в нем измеряемой величины.
19. Передаточная характеристика датчика.
Для каждого датчика можно вывести идеальное (теоретическое) соотношение, связывающее сигналы на его входе и выходе. Оно бы соответствовало реальному соотношению, если бы была возможность идеально спроектировать датчик, изготовить его из идеальных материалов идеальными инструментами и идеальными работниками. Это идеальное соотношение S = f(s) называют передаточной функцией. Она может быть как линейной, так и нелинейной. Зачастую передаточная функция является одномерной (т. е. связывает выходной сигнал только с одним внешним воздействием). Одномерная линейная функция может быть представлена выражением вида: S= a+ bs где a – значение выходного сигнала при нулевом входном, b – наклон прямой, называемый чувствительностью датчика. Тогда для более широкого диапазона значений передаточная функция может быть представлена в виде отрезков прямых (т. е. кусочно-линейная аппроксимация) с разным значением b. В случаях, когда выходной сигнал датчика зависит от нескольких видов внешних воздействий, его передаточная функция является многомерной (например, инфракрасный датчик температуры). Как правило, передаточные функции представляются в виде зависимости «выход от входа», однако когда датчик используется для количественного определения величины внешнего воздействия, необходимо получить зависимость вида s = g(S) («вход от выхода»). При линейной передаточной функции это не представляет особых сложностей, в случае же присутствия в системе нелинейности, задача усложняется. Во многих случаях не удается получить пригодного аналитического выражения, тогда применяют различные методы аппроксимации.
Существует несколько методов экспериментального определения параметров передаточной функции W(p), правомерных для линейных средств измерений, не имеющих чистого запаздывания. Наибольшее распространение получил метод, основанный на использовании переходных характеристик L(t) исследуемых устройств и характеристик типовых динамических звеньев. Переходной характеристикой L(t) динамической системы называется ее реакция на входной сигнал, имеющий вид ступенчатой функции, при нулевых начальных условиях.
Последовательность операций для определения передаточной функции измерительного устройства. На вход исследуемого измерительного устройства подается сигнал в виде
единичной функции, т. е. на входе устройства изменяются скачком напряжение, ток и т. д. Скачок входной величины может быть как положительным, так и отрицательным. Для определенности все последующие рассуждения проводятся применительно к положительному скачку входного сигнала. В зависимости от свойств исследуемого устройства переходная характеристика может иметь апериодический или колебательный характер, а работа устройства может быть описана дифференциальным уравнением первого, второго, третьего и т. д. порядков. При этом измерительные устройства соответственно называются устройствами первого, второго, третьего и т. д. порядков. По переходным характеристикам, полученным экспериментально в соответствии с изложенным, отыскивается передаточная функция измерительного
устройства. Вид передаточной функции определяется главным образом порядком устройства. Зная входной сигнал системы и передаточную функцию, можно восстановить выходной сигнал.