


Программируемый логический контроллер (ПЛК): применение
Любое промышленное оборудование, способное выполнять автономно какие-либо операции, имеют в своем устройстве контроллер.
Контроллер — это мозг для машины. Чем сложнее машина, тем функциональнее контроллер. Технически реализация мозга может быть разной – механика, пневматика либо гидравлика, релейные или электронные системы. Если в конструкции используются реле или решения с «жесткой» логикой, то машина может выполнять только определенные действия — научить машину другим операциям нельзя без вмешательства в ее техническую часть. Такие функции имеют только программируемые логические контролеры или ПЛК.
ПЛК – что это такое?
Контроллер ПЛК — управляющее устройство на основе микропроцессоров, которое приспособлено к работе на производстве. Устройство программируется на упрощенных языках, доступных пользователю без серьезной подготовки.
Структура и устройство ПЛК
Контроллер можно образно предоставить в формате мини-компьютера, но очень компактного и с особенностями. ПЛК, как и ПК, состоят из оперативной памяти, процессора, вспомогательного периферийного оборудования. Однако, дело еще и в том, что промышленные контроллеры должны выполнять не только расчетные задачи, как ПК, но и заниматься сбором информации от массы устройств – это датчики, сенсоры. Также контроллер и выдают сигналы в цепи.
Сейчас выпускаются контроллеры в различных форм-факторах. Это:
- Устройство типа «всё в одном». В одном корпусе объединен процессор, память, выходы/входы;
- Распределенные решения – процессорный модуль с обвязкой сделан в виде отдельного блока, а по шине или через интерфейсы подключатся модули для вывода и ввода.
Первые модели встречаются очень часто, однако, они рассчитаны на эксплуатацию в малых объектах и системах, где нужно обрабатывать малое количество сигналов.
Второй вид контроллеров используют в промышленности гораздо шире – производства с полнофункциональными АСУ требуют значительно большего числа сигналов, которые требуется обрабатывать. Если производство масштабное, то удобнее разнести модули вводы вывода по территории с объединением в единую сеть, которая подчиняется отдельному логическому контроллеру. Такие сети называют полевыми сетями или fieldbus. К этой седи подключаются датчики, исполнительные системы, которые являются интеллектуальными, так как имеют эту возможность.
Существует масса видов полевых сетей. Стандарт
В структуре ПЛК имеется базовые компоненты:
- Модуль процессора;
- Блок питания;
- Модули для ввода/вывода.
Процессорный модуль оснащен встроенной памятью. Имеются разъемы для программатора, удаленных устройств, для подключения к сетям. Питание реализовано в виде отдельного блока. Модули могут быть дискретными либо аналоговыми.
В зависимости от того, сколько каналов для ввода и вывода и какой тип процессора, модули ввод/вывод могут быть установлены на одном шасси с ЦП или на нескольких. До конца 80-х годов модули для ввода и вывода данных располагались отдельно от процессора. В стандартном контроллере современного типа модуль входов и выходов находится на одном шасси с микропроцессором. Некоторые ПЛК позволяют устанавливать более одного микропроцессора.
Модели меньших размеров очень часто предназначены под DIN-рейку. Самые компактные микро или даже нано устройства имеют всю систему, включая адаптер питания и систему ввода/вывода в одном корпусе. Микро-контроллеры иногда оборудуются встроенными панелями для настройки и мониторинга. Большинство микро-решений имеют определенное количество каналов входов/выходов и увеличить их не возможно. Как пример — плата ардуино
Принцип действия ПЛК
В отличие от микропроцессорной техники принцип действия ПЛК немного другой. Софт делится на две части. Первая часть представляет собой блок системных программ. Если провести аналогию с ПК, то системное ПО контроллера выступает в роли операционной системы, ответственной за работу низкоуровневых процессов. Системная часть ПО устанавливается в постоянной памяти в любой момент вступает в работу.
Когда ПЛК включается, то уже через мгновение запускается операционная система. Выполнение пользовательской программы циклическое. Цикл работы состоит из четырех фаз:
- Опрос входов;
- Выполнение команд;
- Установка значений для входов;
- Вспомогательные операции.
Входы и выходы
В любом контроллере реализованы входы трех типов – дискретные, аналоговые, специальные.
Дискретный вход
Один вход может принять только один сигнал и он будет бинарным. Вход может быть либо включенным, либо выключенным. Один вход — это
Если состояние приборов не удается описать в 1 бит, тогда для работы такого оборудования применяют несколько дискретных входов.
Системное ПО обязательно оснащено драйвером. Он считает физические значения каждого входа в ОЗУ. За счет этого программистам нет нужды понимать, как устроен контролер внутри. Дискретный вход – биты, которые можно читать и изменять из оперативной памяти устройства.
Аналоговый вход
Электрический аналоговый сигнал — это уровень напряжения или тока, соответствующий определенным физическим величинам. Это может быть значение температуры, давления, веса, положения, скорости перемещения, частоты оборотов. Так как ПЛК – это прежде всего вычислительный прибор, то аналоговый сигнал переводится в цифровой. Получается дискретная переменная.
Специальный вход
Обыкновенные входы способны удовлетворить практически все нужды. Необходимость в в спец. входах появляется при трудностях в обработке сигналов.
ПЛК оснащены специализированными входами, позволяющие измерять длительность, фиксировать фронты, подсчитывать импульсы. К примеру, для определения положения валов, используют датчики, способные выдавать импульсы на один оборот. Частота может быть очень высокой. Даже на мощных процессорах процесс занимает много времени. В таких ситуациях и нужны спец. входы, способные первично обрабатывать информацию.
Второй тип таких входов – это входы, которые могут мгновенно запускать команды пользователей с прерываниями на выполнения основного ПО.
Дискретный выход
С одним выходом можно коммутировать только один сигнал. В качестве нагрузки на выходы могут использоваться различные исполнительные устройства.
Типы ПЛК
Устройства квалифицируются следующим образом:
- Число каналов для ввода/вывода данных;
- Расположение модулей для ввода/вывода;
- Назначение;
- Способ монтажа;
- Языки программирования.
По числу каналов для ввода/вывода ПЛК делят на классы:
- Нано ПЛК контроллер – часто имеет встроенные возможности, содержит до 16 каналов;
- Малый – от 16 до 100 каналов;
- Средние системы для работы с 100-300 входами и выходами – типичный представитель ПЛК 110 Овен;
- Большие модели с возможностью обработки 300-2000 входов/выходов;
- Сверхбольшие модели – от 2000 и более каналов.
По тому, как располагаются модули, контроллеры различают на:
- Моноблоки – модуль ввода/вывода не отделяется от контроллера и подлежит замене. Устройство выглядит в виде моноблока с модулем ввода/вывода. Зачастую, модели имеют малое число каналов и отличаются малой мощностью;
- Модульные состоят из общей корзины или шасси, где расположены процессор, а также сменные модули с входами в выходами. Модули подбираются исходя из решаемой задачи. Контроллеры оснащаются числом слотов — от 8 до 32. Также возможна модульная конструкция, где каждый модуль соединяется при помощи шины. .
- Распределенные контроллеры – модули изготовлены в отдельных корпусах и соединяются с центральным процессорным модулем по сети. Дальность может составлять до 1,2 км.
Также ПЛК различаются по назначению – это универсальные общепромышленные устройства, коммуникационные , контроллеры ПИД, системы для робототехники, для контроля перемещения и позиционирования.
По способу монтажа промышленные контроллеры можно разделить на:
- Панельные;
- Под DIN-рейку;
- Стоечные;
- Бескорпусные.
По языкам программирования выделяют модели, программируемые на языке ПЛК систем МЕК 61131-3 и на классический языках, таких как С, C#, Visual Basic, Scala.
Ограничения ПЛК
ПЛК, как и любая цифровая техника имеет ограничения. Устройства ограничены:
- объемом ОЗУ,
- мощностью процессора,
- ограниченным числом входов/выходов.
Также в моделях ограничено время срабатывания и на восстановление после сбоев.
Место программируемого логического контроллера в системе управления
Устройства установлены в самых нижних звеньях АСУ ТП. ПЛК – это первый шаг в строительстве АСУ. Автоматизация дает очень рост экономики, позволяет существенно повысить качество производства, избежать чрезмерно тяжелой либо рутинной работы.
Назначение переменных в ПЛК
Как и в любом языке программирования, переменная – именованная или же адресуемая другим способом область памяти, адрес которой можно использовать, чтобы получить доступ к данным. Переменные позволяют также различным образом менять данные, с которыми работает программа.
С помощью переменных ПЛК может обрабатывать сигналы и реагировать на них. При помощи алгоритмов запускаются и останавливаются технологические процессы.
Основы программирования ПЛК. Реле и контроллер
Логика загружается в ПЛК при помощи программного обеспечения. Это ПО определяет, какие из выходов будут под напряжением и какие входные условия нужны для любых изменений. Управляющая программа аналогична схеме работы физического реле, но физически нет ни реле, ни проводов, ни катушек. Все эти элементы – мнимые. ПО разрабатывается и просматривается на ПК, соединенном с интерфейсом контроллера.
Есть кнопка, контроллер и индикатор. Когда кнопка не задействована, сигнал на вход контроллера отправлен не будет. ПО, показывающее открытый вход, не отправит сигнал на выход. Так, на выходе ток отсутствует и лампа не будет гореть.
Если кнопку нажать, то на входной канал отправиться соответствующий сигнал. Контакты переведутся в активное состояние, как физическое реле. В данном случае контакт контроллера, открытый ранее, закроется и программа отправит сигнал на выход. Когда выходной контакт будет под напряжением, то индикатор загорится.
Контакты с индикатором соединены физическим способом. А сигнал виртуальный. Однако, все элементы существуют только в компьютерном ПО, а как физические – нет. Но принцип реле здесь используется. Также в программе можно задавать условия, которые будут проверятся и выполнятся контроллером.
Чтобы создать такую же схему, но на основе физических железных компонентов, понадобится три реле, где два открытых контакта – каждый из них будет использоваться. Но с помощью ПЛК можно не добавляя лишнего оборудования использовать столько контактов на каждый вход, сколько захочется.
Управляющие команды на языке релейной логики просты и понятны для инженеров-электриков. На графическом интерфейсе видны все логические операции. Это электрическая ц3епь с замкнутыми либо разомкнутыми контактами. Если по цепи протекает ток, что это истина. Если ток не протекает, тогда состояние – ложь.
Основой управляющей программы служат логические выражения, состоящие из операндов и переменных. Также программа состоит из операторов. Операторы – это команды языка программирования.
Инженер-программист ПЛК – это сегодня больше инженер, чем программист. Сейчас не нужны сложные языки, писать ассемблерные вставки. Достаточно использовать стандартные функциональные блоки.
Среда программирования
Стандартом для программирования ПЛК является языки МЕК. В начале 90-х годов для этих задач на рынке появилась ПО «CoDeSys». Продукт соответствует стандарту МЕК 61131-3 для работы с ПЛК. ПО пользуется большим спросом по причине бесплатной лицензии.
Сейчас этот программный пакет серьезно вырос. Кроме стандартных интегрированных в систему редактора кода, отладчика и компилятора также в состав включен конфигуратор для контроллеров, промышленных сетей, редактор для составления мнемосхем, отладочных сервер, серверы OPC и DDE. Многие производители ПЛК предлагают эту среду, как базовый инструмент для работы.
Языки программирования ПЛК
Управляющие программы для контроллеров разрабатывают при языков, которые созданы не для программистов в современном понимании, а для инженеров по АСУ ТП.
Самым простым и популярным инструментом считается набор готовых модулей и конфигуратор, позволяющий собрать модули в управляющую цепь. Еще совсем недавно у каждого производителя ПЛК был свой язык. Но к середине 90-х ситуация изменилась. Языки стандартизировали.
Стандарт IEC 1131.3 определяет пять языков:
- Язык лестничных диаграмм LD – это традиционный язык на базе релейных блокировок, где алгоритмы изображаются в виде схем;
- FBD – представляет собой конфигуратор и типовые подпрограммы;
- SFC — язык последовательных схем. Инструмент, близкий к традиционному программированию и на нем реализуют алгоритмы с последовательным управлением;
- ST – язык структурированного типа. Это язык, напоминающий Pascal с поддержкой структурного программирования;
- IL – язык инструкций. Это низкоуровневый инструмент вроде Ассемблера, но он не ориентирован на микропроцессорную архитектуру. Он преимущественно применяется для создания быстрых программ.
Удаленное управление и мониторинг
Контроллеры имеют гибкие возможности для коммуникации с другим оборудованием. Эти возможности позволяют удаленно управлять устройствами, а также интегрировать ПЛК в системы автоматизированного управления и сбора данных.
Операторская панель или HIM – это устройство для визуализации. Она может быть встроенной или подключаться кабелем. Существует масса различных типов таких решений – от простых цифровых с кнопками до серьезных сенсорных с функцией оперативного мониторинга и коррекции параметров.
SCADA – это аббревиатура означает систему диспетчеризации и сбора данных. Это программные пакеты, которые позволяют разрабатывать приложения в режиме реального времени. Также пакет имеет инструменты сбора и обработки данных, архивирования и отображения или управления.
Веб-интерфейс позволяет получать доступ к ПЛК по локальным или глобальным сетям. В зависимости функциональности контроллер может не иметь операторской панели, но есть порт для подключения ПЛК к Ethernet. Тогда устройство можно настраивать удаленно по веб-интерфейсу или с ноутбука.
Более продвинутое решение реализовано в семействе ПЛК Siemens – встроенный веб-сервер. Он позволяет выполнять мониторинг, а также управлять системой. Сегодня в ПЛК реализованы функции подключения к облакам для осуществления удаленного контроля.
Применение контроллеров
Логические контроллеры встречаются в большом количестве на автоматизированных линиях и сборочных конвейерах. Устройства можно встретить на системах стендовых испытания двигателей, на прессовом оборудовании, токарных автоматических станках, установка для сварки, резки металла. Управляющие устройства также встречаются в автоматизации технологических процессов и быту.
Производители ПЛК
Существует масса компаний, которые изготавливают промышленные контроллеры — это:
- Advantech,
- Delta,
- VIPA,
- Mitsubishi Electric,
- WAGO I/O,
- Phoenix Contact
- и многие другие.
Российские производители ПЛК :
- Контар,
- Овен,
- Segnetics,
- Fastwel,
- Текон.
На что обращать внимание при покупке
Все зависит от типа производства и задач, которые нужно будет решать, но существуют и универсальные решения. Важнейшие моменты:
- Универсальность среды программирования для разных платформ;
- Контроллеры с распределенным вводом/выводом;
- Устройства со встроенным вводом выводом;
- Связь с ПК;
- Дублирование ЦП и системы ввода/вывода;
- ПЛК с поддержкой веб-технологий;
- ПЛК с процессором типа PC;
- Переносные устройства для создания программ.
Самый главный пункт здесь – это первый пункт. Не стоит пытаться отыскать самое доступное оборудование на рынке – процесс переподготовки специалистов сведет к нулю всю возможную экономию. Стоить выбрать нескольких производителей и сотрудничать только с их продукций.
Другие специалисты утверждают, что самое главное это ПО. Различий в комфорте использования программных продуктов значительно больше, чем в железе ПЛК.
Программируемый логический контроллер — это… Что такое Программируемый логический контроллер?
Массово применяемый программируемый логический контроллер семейства SIMATIC S7-300Программи́руемый логи́ческий контро́ллер (ПЛК) (англ. Programmable Logic Controller, PLC) или программируемый контроллер — электронная составляющая промышленного контроллера, специализированного (компьютеризированного) устройства, используемого для автоматизации технологических процессов. В качестве основного режима длительной работы ПЛК, зачастую в неблагоприятных условиях окружающей среды, выступает его автономное использование, без серьёзного обслуживания и практически без вмешательства человека.
Иногда на ПЛК строятся системы числового программного управления станком (ЧПУ, англ. Computer numerical control, CNC).
ПЛК являются устройствами реального времени.
В отличие от:
Первые логические контроллеры появились в виде шкафов с набором соединённых между собой реле и контактов. Эта схема задавалась жёстко на этапе проектирования и не могла быть изменена далее.
Первый в мире ПЛК — MOdular DIgital CONtroller (Modicon) 084, имеющий память 4 кБ, произведен в 1968 году.
В первых ПЛК, пришедших на замену обычным логическим контроллерам, логика соединений программировалась схемой соединений LD (Ladder logic Diagram). Устройство имело тот же принцип работы, но реле и контакты (кроме входных и выходных) были виртуальными, то есть существовали в виде программы, выполняемой микроконтроллером ПЛК. Современные ПЛК являются «свободно программируемыми».
В системах управления технологическими объектами логические команды преобладают над числовыми операциями, что позволяет при сравнительной простоте микроконтроллера (шины шириной 8 или 16 бит), получить мощные системы действующие в режиме реального времени. В современных ПЛК числовые операции реализуются наравне с логическими. В то же время, в отличие от большинства процессоров компьютеров, в ПЛК обеспечивается доступ к отдельным битам памяти.
Виды ПЛК
Основные ПЛК
Программируемое (интеллектуальные) реле
- Siemens LOGO!,
- Mitsubishi — серия Alpha XL,
- Schneider Electric — Zelio Logic,
- Omron — ZEN,
- Moeller — EASY, MFD-Titan,
- Comat BoxX.
- ОВЕН ПР110
Программные ПЛК на базе IBM PC-совместимых компьютеров (англ. SoftPLC)
ПЛК на базе простейших микропроцессоров (i8088/8086/80186 и т. п.)
Интерфейсы ПЛК
ПЛК в своём составе не имеют интерфейса для человека, типа клавиатуры и дисплея. Их программирование, диагностика и обслуживание производится подключаемыми для этой цели программаторами — специальным устройством или устройствами на базе более современных технологий — персонального компьютера или ноутбука, со специальными интерфейсами и со специальным программным обеспечением (например, SIMATIC STEP 7 в случае ПЛК SIMATIC S7-300 или SIMATIC S7-400). В системах управления технологическими процессами ПЛК взаимодействуют с различными компонентами систем человеко-машинного интерфейса (например операторскими панелями) или рабочими местами операторов на базе ПК, часто промышленных, обычно через промышленную сеть.
Датчики и исполнительные устройства подключаются к ПЛК:
- централизованно: в корзину ПЛК устанавливаются модули ввода-вывода. Датчики и исполнительные устройства подключаются отдельными проводами непосредственно, либо при помощи согласовательных модулей, к входам/выходам сигнальных модулей;
- или по методу распределённой периферии, когда удалённые от ПЛК датчики и исполнительные устройства связаны с ПЛК посредством каналов связи и, возможно, корзин-расширителей с использованием связей типа «ведущий-ведомый» (англ. Master-Slave).
Коммуникации
Языки программирования ПЛК
Для программирования ПЛК используются стандартизированные языки МЭК (IEC) стандарта IEC61131-3
- Языки программирования (графические)
- LD — Язык релейных схем — самый распространённый язык для PLC
- FBD — Язык функциональных блоков — 2-й по распространённости язык для PLC
- SFC — Язык диаграмм состояний — используется для программирования автоматов
- CFC — Не сертифицирован IEC61131-3, дальнейшее развитие FBD
- Языки программирования (текстовые)
- IL — Ассемблер
- ST — Паскале-подобный язык
Структурно в IEC61131-3 среда исполнения представляет собой набор ресурсов (в большинстве случаев это и есть ПЛК, хотя некоторые мощные компьютеры под управлением многозадачных ОС представляют возможность запустить несколько программ типа softPLC и имитировать на одном ЦП несколько ресурсов). Ресурс предоставляет возможность исполнять задачи. Задачи представляют собой набор программ. Задачи могут вызываться циклически, по событию, с максимальной частотой.
Программа — это один из типов программных модулей POU. Модули (Pou) могут быть типа программа, функциональный блок и функция.
- В некоторых случаях для программирования ПЛК используются нестандартные языки, например:
- Блок-схемы алгоритмов
- Си-ориентированная среда разработки программ для ПЛК.
- HiGraph 7 — язык управления на основе графа состояний системы.
Инструменты программирования ПЛК на языках МЭК 61131-3 могут быть специализированными для отдельного семейства ПЛК (например, STEP 7 для контроллеров SIMATIC S7-300/400) или универсальными, работающими с несколькими (но далеко не всеми) типами контроллеров:
Структуры систем управления
- Централизованные, (малые системы)
- Распределенные, DCS (большие системы)
Удаленное управление и мониторинг
Специальное использование
Для увеличения надёжности системы управления, построенной на ПЛК, применяется резервирование разных компонентов: шасси, источников питания, самих контроллеров.
Также, выпускаются специальные линейки продуктов: например Siemens[1][2], или Allen-Bradley[3] выпускает всю линейку (ввод-вывод, интерфейсные модули и т.д. дополнительно к самим CPU).
См. также
Литература
- Мишель Ж. Программируемые контроллеры: архитектура и применение. — М.: Машиностроение, 1986
- Э. Парр. Программируемые контроллеры: руководство для инженера. — М.: БИНОМ. Лаборатория знаний, 2007. — 516 с. ISBN 978-5-94774-340-1
- Петров И. В. Программируемые контроллеры. Стандартные языки и приемы прикладного проектирования / Под ред. проф. В. П. Дьяконова. — М.: СОЛОН-Пресс, 2004. — 256 c. ISBN 5-98003-079-4
- Денисенко В. В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. — М: Горячая Линия-Телеком, 2009. — 608 с. ISBN 978-5-9912-0060-8
- Минаев И.Г. Программируемые логические контроллеры. Практическое руководство для начинающего инженера. /И.Г. Минаев, В.В. Самойленко — Ставрополь: АГРУС, 2009. — 100 с. ISBN 978-5-9596-0609-1
- Минаев И.Г. Программируемые логические контроллеры в автоматизированных системах управления / И.Г. Минаев, В.М. Шарапов, В.В. Самойленко, Д.Г. Ушкур. 2-е изд., перераб. и доп. — Ставрополь: АГРУС, 2010. — 128 с. ISBN 978-5-9596-0670-1
- О. А. Андрюшенко, В. А. Водичев. Электронные программируемые реле серий EASY и MFD-Titan. — 2-е изд., испр. — Одесса: Одесский национальный политехнический университет, 2006. — С. 223.
Примечания
Что такое PLC (ПЛК) — PLC
Что такое PLC (ПЛК)
Январь 09, 2011 Arman
Программируемый логический контро́ллер (ПЛК) (англ. Programmable Logic Controller, PLC) – это аббревиатура, которая объединяет весьма разные устройства, отличающиеся количеством и качеством входов и выходов, интерфейсов, средой программирования и т.п. Пожалуй, единственный признак, выделяющий ПЛК из множества средств автоматизации – способность реализации пользовательского алгоритма управления технологической системой.

Российский ПЛК
Кто и когда изобрел ПЛК
Современные источники приписывают честь создания ПЛК янки. И в отличие скажем от «русского света» Яблочкова нахально переименованного в «лампочку Эдисона» здесь видимо стоит поверить. Годом рождения ПЛК принято считать 1969 год, когда такие аппараты впервые были внедрены на заводах американской автомобильной промышленности. Довольно быстро такие аппараты оценили по обе стороны океана и сегодня в России мы гораздо чаще имеем дело с немецкими и японскими производителями ПЛК, нежели с американскими. В последнее время на рынке появились интересные разработки отечественных производителей. Благодаря успехам микроэлектроники произошла миниатюризация ПЛК, превратившая вчерашние шкафы в компактные коробочки.

ПЛК компании siemens
Понятия
Как и весь цивилизованный мир, сфера ПЛК существует по понятиям. Понятия эти устоялись и закреплены в стандарте МЭК 61131-3 (Международной электротехнической комиссии). Именно в нем прописана структура проекта для ПЛК, стандартные языки программирования. Другие разделы стандарта МЭК 61131 определяют требования к аппаратной части ПЛК, их документированию, да и много чему еще. Скажу по секрету фолиант исключительно увесистый, однако чрезвычайно полезный. Скажем спасибо его разработчикам.
Мой блог находят по следующим фразам
Промышленные контроллеры (ПЛК) | LAZY SMART
Современную промышленность невозможно представить без систем автоматизации. Сложность производственных процессов делает невозможным управление ими вручную, к тому же системы автоматики обходятся гораздо дешевле, чем обслуживающий персонал, да и работают они быстрее и надёжнее. Да что говорить о промышленности – в настоящее время практически ни одно здание не обходится без автоматики. Школы, больницы, детские сады, офисные и складские помещения, загородные дома и коттеджи – все эти объекты оснащены инженерными системами с автоматическим управлением. Несмотря на многообразие применений и сфер использования все системы автоматики работают по одному принципу и обладают схожей структурой, в центре которой находится «мозг» системы – программируемый логический контроллер (ПЛК).
С чего всё начиналось?
Все начиналось с построения релейно-контактных систем управления, представляющих из себя огромные шкафы, набитые проводами и релейными модулями. В эти шкафы приходили сигналы от датчиков, а на выходе формировались команды исполнительным устройствам. Кроме того, что они были больших размеров, такие системы управления неудобны тем, что они совершенно не гибкие: для того, изменить логику управления, необходимо вручную перебирать всю электрическую схему. С развитием микропроцессорной техники на смену релейным шкафам пришли ПЛК – устройства, выполняющие те же функции, но имеющие принципиально другой механизм преобразования входных сигналов в выходные. Такое преобразование в ПЛК выполняется в соответствии с записанной программой. С появлением контроллеров размеры систем управления уменьшились в десятки раз, значительно упростился процесс их разработки и последующих изменений.
Принцип работы ПЛК
ПЛК работает по циклическому принципу. В самом начале цикла ПЛК сканирует состояния входов, на которые поступают сигналы от датчиков и устройств. Затем в соответствии с алгоритмом программы происходит вычисление состояния выходов. В конце рабочего цикла контроллер устанавливает каждый выход в состояние, которое было определено.
1. Чтение состояний входов
2. Выполнение программы пользователя
3. Запись состояний выходов
Указанные этапы цикла выполняются последовательно – это означает, что изменения состояний входов не будут «замечены» контроллером во время выполнения программы. По этой причине одним из важнейших параметров ПЛК является время реакции. Если оно окажется больше, чем минимальный период изменения состояний входов, некоторые события, происходящие в системе, будут «пропущены» контроллером.
Также стоит учесть, что и датчики реагируют на изменения в системе не мгновенно. Поэтому полное время реакции системы управления складывается из времени реакции ПЛК и времени реакции датчиков.
Время реакции системы — время с момента изменения состояния системы до момента выработки соответствующей реакции (принятия решения).
Системы реального времени
Все системы можно условно разделить на системы жёсткого и мягкого реального времени.
В системах жёсткого реального времени реакция ПЛК не должна превышать определённый временной порог. При увеличении времени реакции система теряет свою работоспособность.
В системах мягкого реального времени при увеличении времени реакции может происходить сильное ухудшение качества управления, но работоспособность при этом не теряется.
Входы и выходы ПЛК
Дискретные входы – предназначены для ввода сигналов от дискретных датчиков (кнопки, тумблеры, концевые выключатели, термостаты и др.). Напряжение сигнала унифицировано для всех ПЛК и составляет 24 В. Проще говоря, при «появлении» на входе контроллера напряжение 24 В – ПЛК будет считать этот вход «включенным», то есть он примет значение логической «1» в восприятии контроллера.
Дискретные выходы – предназначены для управления устройствами по принципу «включить/выключить» (магнитные пускатели, лампочки, клапаны и др.). Дискретный выход – это обычный контакт, который может замкнуть или разомкнуть управляющую или питающую цепь устройства.
Аналоговые входы – предназначены для ввода непрерывного сигнала с датчиков и других устройств. Существует два основных вида унифицированных аналоговых сигналов: по току – 4..20 мА, по напряжению 0..10 В. Например, датчик температуры имеет диапазон -10 — +70 °С, тогда 4мА на выходе соответствует -10 °С, а 20мА – это +70 °С. С аналоговыми сигналом по напряжению всё аналогично.
Аналоговые выходы – предназначены для плавного управления устройствами. Унифицированные значения аналогового сигнала на выходах такое же, как и на входах – 4..20мА (0..10В). Например, вентиль может поворачиваться в пределах от 0° до 90°. Ток 4мА повернёт его в положение 0°, а 20мА – в положение 90°. Для того, чтобы повернуть его на 45°, нужно подать на него управляющий сигнал 8мА. Таким образом, меняя значение силы тока на выходе, контроллер может поворачивать вентиль на заданный угол.
Специализированные входы/выходы – не унифицированы, применяются для подключения нестандартных датчиков и исполнительных устройств со специфическим уровнем сигнала, питанием и программной обработкой.
Цифровые интерфейсы ПЛК
Изначально ПЛК предназначались для управления последовательными логическими процессами. Современные контроллеры помимо логических операций способны выполнять цифровую обработку сигналов. Они могут обмениваться информацией с другими устройствами, такими как панели оператора, GSM-модули, частотные преобразователи, серверы сбора данных и др.
ПЛК могут иметь распределённую структуру, когда модули входов и выходов находятся на значительном удалении от самого контроллера, вблизи объекта управления. Несколько ПЛК, управляющие разными частями одной системы, могут объединяться в сеть для обмена информаций и согласования управляющих действий, а так же передачи всей информации о системе в центральный диспетчерский пункт.
В этих случаях обмен удалённых модулей и устройствами с ПЛК осуществляется по цифровым интерфейсам с использованием специализированных протоколов, таких как Modbus RTU, ModBus TCP, CANopen, Profibus, EtherNet IP и других.
Что такое ПЛК? Об индустриальных программируемых логических контроллерах
Главная страница » Что такое ПЛК? Об индустриальных программируемых логических контроллерах
Программируемый логический контроллер (ПЛК), прежде всего, следует рассматривать индустриальным компьютером, представляющим основной компонент сектора промышленной автоматизации. Программируемый логический контроллер представляет систему даже более специализированную, чем цифровой компьютер, используемый как в промышленности, так и в других областях, где требуются системы управления. На современном рынке доступны различные типы ПЛК, изготовленные разными производителями. Поэтому логичным видится рассмотрение ПЛК в качестве практикуемого оборудования, а также типичное исполнение таких систем.
СОДЕРЖИМОЕ ПУБЛИКАЦИИ :
Обобщённая характеристика индустриального компьютера
Благодаря прочной конструкции, исключительным функциональным возможностям, таким как:
- ПИД-регуляторы,
- последовательное управление,
- таймеры и счетчики,
- простота программирования,
- надежные возможности управления,
- простота использования аппаратных средств,
программируемый логический контроллер видится уникальным устройством управления. Очевидный момент — ПЛК изобретён с целью замены традиционных панелей управления, работа которых во многом зависит от механических компонентов. В частности, устаревшее оборудование, как правило, основано на электромагнитных реле.
CPU224XP
 Современные электронные устройства управления индустриального применения. Чаще этот тип аппаратов называют просто – ПЛК, аббревиатура систем, полностью заменяющих системы электромеханической коммутации
Современные электронные устройства управления индустриального применения. Чаще этот тип аппаратов называют просто – ПЛК, аббревиатура систем, полностью заменяющих системы электромеханической коммутацииСовременные программируемые логические контроллеры способны непрерывно контролировать входные сигналы, поступающие от датчиков и вырабатывать выходные решения для управления исполнительными механизмами. Достигается такого рода функционал за счёт специально разработанной компьютерной программы. Каждую систему ПЛК составляют как минимум три модуля:
- Модуль процессора.
- Модуль питания.
- Модуль ввода / вывода (один или несколько).
Что представляет собой модуль процессора?
Этот компонент ПЛК содержит центральный микропроцессор и систему памяти. Микропроцессор модуля отвечает за выполнение всех необходимых вычислений, плюс обеспечивает обработку данных, принимая входные сигналы и вырабатывая соответствующие выходные сигналы.
Система памяти обычно организована блоками ROM (Read Only Memory) – постоянная память и блоками RAM (Random Access Memory) – память произвольной выборки. Первый вид (ROM) содержит операционную систему, драйвер и прикладные программы. Второй вид (RAM) хранит написанные пользователем программы и рабочие данные.
Системы ПЛК используют блоки памяти для сохранения пользовательских программ и данных. Поэтому даже при отсутствии источника питания все технологические данные сохраняются, благодаря чему выполнение пользовательской программы становится возможным сразу после возобновления питания.
CF2N FX2N
 Устройствам подобного типа не страшны перебои электричества или прекращение подачи питания продолжительное время. Вся технологическая информация по управлению надёжно сохраняется
Устройствам подобного типа не страшны перебои электричества или прекращение подачи питания продолжительное время. Вся технологическая информация по управлению надёжно сохраняетсяСвоеобразной особенностью ПЛК является отсутствие необходимости использования клавиатуры или монитора для перепрограммирования процессора каждый раз, когда это необходимо. Сохраняемая память может быть реализована посредством использования:
Схемные шины индустриальных ПЛК
Некоторые модульные ПЛК содержат на задней панели схемные шины (стойки), где все модули, такие как ЦП и другие модули ввода / вывода, подключены к соответствующим слотам. Эта шина обеспечивает связь между процессором и модулями ввода / вывода для отправки или получения данных.
Связь устанавливается путём адресации модулей ввода / вывода в соответствии с расположением модуля ЦП вдоль шины. Некоторые шины обеспечивают необходимую мощность для схемы модуля ввода / вывода, но не обеспечивают питание датчикам, исполнительным механизмам, в схеме ввода / вывода.
Модуль питания ПЛК индустриального типа
Питающие модули обеспечивают необходимую мощность всей системы контроллера посредством преобразования доступной мощности переменного тока в мощность постоянного тока для модулей ЦП и ввода / вывода. Обычно выход постоянного напряжения 5В управляет схемой компьютера, тогда как напряжением 24В постоянного тока питаются шины, где используется несколько датчиков, а также исполнительных механизмов.
Модульная организация ввода / вывода
Модули ввода и вывода ПЛК позволяют подключать датчики и различные исполнительные механизмы к системе для определения или контроля переменных в реальном времени:
- температуры,
- расхода давления,
- влажности и других.
Схематичное исполнение ввода / вывода различается по типу, диапазону и возможностям. Некоторые схемы включают следующее:
- Модуль цифрового ввода / вывода, используемый для подключения датчиков, исполнительных механизмов цифрового характера. Только для включения и выключения. Эти схемы доступны под переменный и постоянный ток с переменным количеством цифровых входов и выходов.
- Аналоговые модули ввода / вывода под использование датчиков, исполнительных механизмов, поддерживающих аналоговые электрические сигналы. В состав схем встроен аналого-цифровой преобразователь. Количество доступных каналов также варьируется в зависимости от приложения.
- Модули интерфейса связи — интеллектуальные схемы ввода / вывода, организующие обмен информацией между процессором и сетью. Используются для связи с другими ПЛК и компьютерами, расположенными в непосредственной близости или на удалённом расстоянии.
Типичное исполнение программируемых логических контроллеров
Программируемые логические контроллеры (ПЛК) интегрируются как единичные или модульные системы.
ПЛК РАЗНЫЕ
 Блок-схема типичного устройства: 1 – входы датчиков и прочих устройств; 2 – коммуникационная схема ввода; 3 – блок питания системы; 4 – микропроцессор; 5 – коммуникационная схема вывода; 6 – выходные сигналы устройств; 7 – блоки памяти; 8 – подключение программатора
Блок-схема типичного устройства: 1 – входы датчиков и прочих устройств; 2 – коммуникационная схема ввода; 3 – блок питания системы; 4 – микропроцессор; 5 – коммуникационная схема вывода; 6 – выходные сигналы устройств; 7 – блоки памяти; 8 – подключение программатораИндустриальный единичный ПЛК содержит несколько схемных блоков в одном корпусе. Следовательно, возможности ввода / вывода определяются производителем, а не пользователем. Некоторые интегрированные ПЛК позволяют подключать дополнительные входы / выходы, обеспечивая модульность системы.
Модульный ПЛК также содержит ряд компонентов, подключаемых к общей шине ввода / вывода. При этом поддерживается возможность аппаратного расширения. Такая система содержит блок питания, процессор, схемы ввода / вывода, подключаемые к одной шине с поддержкой определения пользователем. Модульные ПЛК выпускают разные по размерам, укомплектованные источником питания переменного тока, наделённые вычислительными возможностями и широкой поддержкой ввода / вывода.
Между тем модульные индустриальные ПЛК разделятся на:
- малые,
- средние,
- большие,
устройства в зависимости от объёма памяти, программ и количества функций ввода / вывода.
Малые или компактные ПЛК
Конструкция спроектирована в виде компактного, прочного блока, который обычно размещается в непосредственной близости с контролируемым оборудованием. Компактные ПЛК используются для замены встроенной логики реле, счетчиков, таймеров и т. д.
Расширяемость такой системы в плане ввода / вывода ограничена до одного или двух устройств. Малые аппараты используют список логических команд или язык релейной логики в качестве языка программирования.
Конструкции среднего размера
Эта разновидность в основном используется в промышленно-производственном секторе. Аппараты позволяют использовать множество подключаемых модулей, которые монтируются на объединительной плате системы.
Несколько сотен точек ввода / вывода обеспечиваются путём добавления дополнительных плат ввода / вывода. Дополнительно к этому средние по размерности ПЛК предоставляют средства связи.
Большие производительные системы
Конструкции подобного исполнения используются на местах, где востребованы сложные функции управления процессом. Производительность больших контроллеров управления значительно выше, чем средних аппаратов с точки зрения памяти, языков программирования, точек ввода / вывода, коммуникационных модулей и т. д. В основном крупные индустриальные контроллеры используются:
- системами диспетчерского управления и сбора данных (SCADA),
- крупными индустриальными предприятиями,
- распределенными системами управления и т. п.
Технический вывод
Комбинация управляющих структур PLC и SCADA в основном используется в секторе промышленной автоматизации, а также в системах электроснабжения, таких как системы передачи и распределения электроэнергии. Программируемая последовательная коммутация является еще одной важной областью применения ПЛК. Следовательно, выбор оборудования для определенного применения требует нескольких соображений относительно разных типов программируемых логических контроллеров.
ПЛК_ликбез — PLC — это просто!!
PLC должен быть предназначен
1. для работы в условиях промышленной среды
2. в режиме реального времени
3. должен быть доступен для программирования неспециалистом в области информатики.
К негативным факторам, определяющим промышленную среду, относятся: температура и влажность, удары и вибрация, коррозионно-активная газовая среда, минеральная и металлическая пыль, электромагнитные помехи.
Эти факторы обусловливают жесткие требования, определяющие схемотехнические решения, элементную и конструктивную базу PLC. Физическое исполнение контроллера определяется требуемой степенью защиты, начиная от контроллеров в легких пластиковых корпусах, предназначенных для монтажа в шкафу (степень защиты IР20), и до герметичных устройств в литых металлических корпусах, предназначенных для работы в особо жестких условиях. Правильно подобранный по условиям эксплуатации контроллер нельзя повредить извне без применения экстремальных методов.
Физически типичный PLC представляет собой блок, имеющий определенный набор выходов и входов, для подключения датчиков и исполнительных механизмов.
PLC система состоит из 5 основных компонентов:
- Источник энергии
- Программатор (РС)
- Процессор CPU
- Входной модуль
- Выходной модуль
Источник энергии
Должен предусматривать преобразование энергии переменного сигнала в стандартные напряжения 5В, необходимое для работы процессора и 24 В, необходимое для блоков входа/входа.
Пример
Блок питания LOGO!Power

- Рис. 1 Блок питания LOGO!Power

LOGO!Power – импульсный источник питания (рис 1), диапазон входного напряжения AC 85V до 264V, помехозащита класса B. Импульсный источник питания обеспечивает лучшую защиту подключенных нагрузок
Программатор (РG) – персональный компьютер или промышленный программатор, с которого программа с помощью стандартного кабеля вводится в память контроллера.
- Рис.2 Simatic Field РG

Процессор (CPU). Аппаратно PLC является вычислительной машиной. Поэтому архитектура его
процессорного ядра практически не отличается от архитектуры компьютера. Современный
микроконтроллер — это однокристальная микросхема, в состав которой входит: — 8-, 16- или 32-разрядный процессор, имеющий внутреннюю постоянную и оперативную память (десятки килобайт), таймеры, счётчики, аналого-цифровые преобразователи, широтно-импульсные модуляторы, модули обработки сигналов в реальном времени.
Отличия в периферии: отсутствуют видеоплата, средства ручного ввода и дисковая подсистема. Вместо них PLC имеет блоки входов и выходов.
Центральные процессоры S7-200
S7-200 используется 5 моделей центральных процессоров, отличающихся объемами встроенной памяти, количеством и видом встроенных входов и выходов, количеством встроенных интерфейсов RS 485, количеством потенциометров аналогового задания цифровых величин и другими показателями. Каждая модель имеет две модификации:
А) С напряжением питания 24В DC и дискретными выходами 24В/0.75А DC на основе транзисторных ключей.
В) С напряжением питания 115/230В AC и дискретными выходами в виде замыкающих контактов реле с нагрузочной способностью до 2А на контакт.
Все центральные процессоры оснащены блоками питания =24В для питания датчиков или другой нагрузки.
Дискретные входы всех центральных процессоров рассчитаны на входное напряжение =24В.
Встроенный интерфейс RS 485
Встроенный интерфейс RS 485 (один или два) используется:
без дополнительного программного обеспечения:
- для программирования контроллера;
- для включения контроллера в сети РРI или МРI со скоростью передачи данных до 187.5 Кбит/с;
- в качестве свободно программируемого порта с поддержкой ASCII протокола и скоростью до 38.4 Кбит/с;
с дополнительным программным обеспечением Instruction Library:
- для поддержки протокола MOTBUS RTU и работы в режиме ведомого и ведущего сетевого устройства;
- для поддержки протокола USS со скоростью передачи данных до 19.2 Кбит с и возможностью подключения до 30 преобразователей частоты (например, преобразователей серий МIСROМАSТЕR или SINAMICS).
Коммуникационные модули
- СР 243-1: для подключения к сети Industrial Ethernet, 10/100 Мбит/с, ТСР/IР.
- СР 243-1 IТ: для подключения к сети Ethernet, 10/100 Мбит/с, ТСР/1Р. Поддержка функций НТТР/FТР-сервера, FТР-клиента. Flash память объемом 8 Мбайт для хранения файловой системы.
- СР 243-2: коммуникационный процессор ведущего устройства АS-Interfacе, способный обслуживать до 62 ведомых устройств.
- ЕМ 277: для подключения к сети PROFIBUS-DP и выполнения функций ведомого устройства, до 12 Мбит/с.
- ЕМ 241: модем для непосредственного соединения двух S7-200 через телефонную сеть, передачи SМS-сообщений, поддержки функций ведущего /ведомого устройства MODBUS.
Входные и выходные модули PLC – это соединения микропроцессора с реальным миром. Они могут классифицироваться по виду сигналов:
- дискретные
- аналоговые.
Бинарные входы и выходы называют обычно дискретными. Они обрабатывают сигналы с кнопок, выключателей, датчиков положения (типа on-off).
Аналоговый или непрерывный сигнал — это уровень напряжения или тока, соответствующий некоторой технологической величине в каждый момент времени: температуре, давлению, расходу, положению, скорости, частоте. Аналоговые входы контроллеров имеют различные параметры и возможности:
- разрядность АЦП,
- диапазон входного сигнала,
- уровень шума и нелинейность,
- возможность автоматической калибровки,
- регулирование коэффициента усиления,
- фильтрация.
Существуют аналоговые входы, предназначенные для подключения термометров сопротивления и термопар, для которых требуется специальная аппаратная поддержка (трехточечное включение, источники образцового тока, схемы компенсации холодного спая, схемы линеаризации и т. д.). Аналоговые сигналы в PLC обязательно преобразуются в цифровую, т. е. заведомо дискретную форму представления.
В системах PLC предусмотрены гальваническая развязка входов-выходов, защита по току и напряжению, зеркальные выходные каналы, сторожевой таймер задач и микропроцессорного ядра.
Гальваническая развязка входов-выходов PLC осуществляется с помощью оптоэлектронных пар или оптронов. Вход и выход процессора имеет напряжение 5 В. Они состоят из светодиода и фототранзистора, объединённых в едином блоке. Ток, текущий на вход светодиода, вызывает свечение светодиода в видимой или ИК части спектра. Этот свет, попадая на фототранзистор, образует ток в выходной цепи (рис.3, 4).

- Рис.3 Гальваническая развязка входов PLC

Выходные модули.
Транзисторные выходы
- Рис. 4. Гальваническая развязка выходов PLC

Мой блог находят по следующим фразам
12.Понятие программируемого логического контроллера (плк).
Любая машина, способная автоматически выполнять некоторые операции, имеет в своем составе контроллер (англ.управляющий) —модуль, обеспечивающий логику работы устройства. Контроллер — это мозг машины. Естественно, чем сложнее логика работы машины, тем «умнее» должен быть контроллер.
Технически контроллеры реализуются по-разному. Это может быть механическое устройство, пневматический или гидравлический автомат, релейная или электронная схема или даже компьютерная программа. Контроллеры, выполненные на основе реле или микросхем с «жесткой» логикой, невозможно научить делать другую работу без существенной переделки. Очевидно, что такой возможностью обладают только программируемые логические контроллеры (ПЛК).Идея создания ПЛК родилась практически сразу с появлением микропроцессора, т. е. более 30 лет назад.
П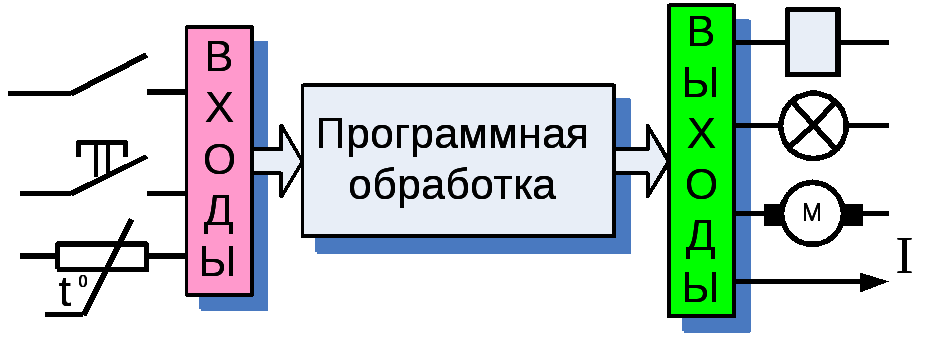 рограммируемый
логический контроллер, ПЛК —микропроцессорное устройство,
предназначенное для управления
технологическими процессами в
промышленности и другими сложными
технологическими объектами. Принцип
работы ПЛК заключается в сборе сигналов
от датчиков и их обработке по прикладной
программе пользователя с выдачей
управляющих сигналов на исполнительные
устройства.
рограммируемый
логический контроллер, ПЛК —микропроцессорное устройство,
предназначенное для управления
технологическими процессами в
промышленности и другими сложными
технологическими объектами. Принцип
работы ПЛК заключается в сборе сигналов
от датчиков и их обработке по прикладной
программе пользователя с выдачей
управляющих сигналов на исполнительные
устройства.
Физически, типичный ПЛК представляет собой блок, имеющий определенный набор выходов и входов, для подключения датчиков и исполнительных механизмов.
Программируемый контроллер — это программно управляемый дискретный автомат, имеющий некоторое множество входов, подключенных посредством датчиков к объекту управления, и множество выходов, подключенных к исполнительным устройствам. ПЛК контролирует состояния входов и вырабатывает определенные последовательности программно заданных действий, отражающихся в изменении выходов. ПЛК предназначен для работы в режиме реального времени в условиях промышленной среды и должен быть доступен для программирования неспециалистом в области информатики.
Изначально ПЛК предназначались для управления последовательными логическими процессами, что и обусловило слово «логический» в названии ПЛК. Современные ПЛК помимо простых логических операций способны выполнять цифровую обработку сигналов, управление приводами, регулирование, функции операторского управления и т. д.
13.Место плк в системе управления.
Основные функции, выполняемые ПЛК в системах управления это управление, защита, измерение физических сигналов, отображение и регистрация технологических процессов. ПЛК является основным функциональным элементом современных АСУ ТП.
На заре своего появления ПЛК имели только бинарные входы, т. е. входы, значения сигналов на которых способны принимать только два состояния — логического нуля и логической единицы. Так, наличие тока (или напряжения) в цепи входа считается обычно логической единицей. Отсутствие тока (напряжения) означает логический ноль. Датчиками, формирующими такой сигнал, являются кнопки ручного управления, концевые датчики, датчики движения, контактные термометры и многие другие.
Бинарный выход также имеет два состояния — включен и выключен. Сфера применения бинарных выходов очевидна: электромагнитные реле, силовые пускатели, электромагнитные клапаны, световые сигнализаторы и т.д.
В современных ПЛК широко используются аналоговые входы и выходы. Аналоговый илинепрерывный сигнал отражает уровень напряжения или тока, соответствующий некоторой физической величине в каждый момент времени. Этот уровень может относиться к температуре, давлению, весу, положению, скорости, частоте и т.д., словом, к любой физической величине.
Аналоговые входы контроллеров могут иметь различные параметры и возможности. Так, к их параметрам относятся: разрядность АЦП, диапазон входного сигнала, время и метод преобразования, несимметричный или дифференциальный вход, уровень шума и нелинейность, возможность автоматической калибровки, программная или аппаратная регулировка коэффициента усиления, фильтрация.
Особые классы аналоговых входов представляют входы, предназначенные для подключения термометров сопротивления и термопар. Здесь требуется применение специальной аппаратной поддержки (трехточечное включение, источники образцового тока, схемы компенсации холодного спая, и т. д.).
В сфере применения ПЛК бинарные входы и выходы называют обычно дискретными. Хотя, конечно, это не точно. Аналоговые сигналы в ПЛК обязательно преобразуются в цифровую, т. е. заведомо дискретную форму представления. Но в технических документах ПЛК любой фирмы вы встретите именно указание количества дискретных и аналоговых входов. Поэтому и далее мы сохраним устоявшуюся здесь терминологию.
Помимо «классических» дискретных и аналоговых входов-выходов многие ПЛК имеют специализированные входы-выходы. Они ориентированы на работу с конкретными специфическими датчиками, требующими определенных уровней сигналов, питания и специальной обработки. Например, блоки управления шаговыми двигателями, интерфейсы дисплейных модулей и т. д.
Входы-выходы ПЛК не обязательно должны быть физически сосредоточены в общем корпусе с процессорным ядром. В последние годы все большую популярность приобретают технические решения, позволяющие полностью отказаться от прокладки кабелей для аналоговых цепей. Входы-выходы выполняются в виде миниатюрных модулей, расположенных в непосредственной близости от датчиков и исполнительных механизмов. Соединение подсистемы ввода-вывода с ПЛК выполняется посредством одного общего цифрового кабеля (промышленной сети).