


Угловое ускорение — Википедия
Угловое ускорение — псевдовекторная физическая величина, равная первой производной от псевдовектора угловой скорости по времени
ε→=dω→dt{\displaystyle {\vec {\varepsilon }}={\frac {d{\vec {\omega }}}{dt}}}
Угловое ускорение характеризует интенсивность изменения модуля и направления угловой скорости при движении твёрдого тела.
Как приходят к понятию углового ускорения: ускорение точки твердого тела при свободном движении[править | править код]
К понятию углового ускорения можно прийти, рассматривая вычисление ускорения точки твердого тела, совершающего свободное движение. Скорость точки тела B{\displaystyle B} при свободном движении, согласно формуле Эйлера, равна
v→B=v→A+ω→×AB→{\displaystyle {\vec {v}}_{B}={\vec {v}}_{A}+{\vec {\omega }}\times {\vec {AB}}}
где v→A{\displaystyle {\vec {v}}_{A}} — скорость точки тела A{\displaystyle A}, принятой в качестве полюса; ω→{\displaystyle {\vec {\omega }}} — псевдовектор угловой скорости тела; AB→{\displaystyle {\vec {AB}}} — вектор, выпущенный из полюса в точку, скорость которой вычисляется. Дифференцируя по времени данное выражение и используя формулу Ривальса
aB→=aA→+ε→×AB→+ω→×(ω→×AB→){\displaystyle {\vec {a_{B}}}={\vec {a_{A}}}+{\vec {\varepsilon }}\times {\vec {AB}}+{\vec {\omega }}\times ({\vec {\omega }}\times {\vec {AB}})}
aB→=aA→+aBArot→+aBAaxis→{\displaystyle {\vec {a_{B}}}={\vec {a_{A}}}+{\vec {a_{BA}^{rot}}}+{\vec {a_{BA}^{axis}}}}
где a→A{\displaystyle {\vec {a}}_{A}} — ускорение полюса A{\displaystyle A}; ε→=dω→dt{\displaystyle {\vec {\varepsilon }}={\frac {d{\vec {\omega }}}{dt}}} — псевдовектор углового ускорения. Составляющая ускорения точки B{\displaystyle B}, вычисляемая через угловое ускорение называется вращательным ускорением точки B{\displaystyle B} вокруг полюса A{\displaystyle A}
a→BArot=ε→×AB→{\displaystyle {\vec {a}}_{BA}^{\,rot}={\vec {\varepsilon }}\times {\vec {AB}}}
Последнее слагаемое в полученной формуле, зависящее от угловой скорости, называют осестремительным ускорением ускорением точки B{\displaystyle B} вокруг полюса A{\displaystyle A}
a→BAaxis=ω→×(ω→×AB→){\displaystyle {\vec {a}}_{BA}^{\,axis}={\vec {\omega }}\times \left({\vec {\omega }}\times {\vec {AB}}\right)}
Геометрический смысл псевдовектора углового ускорения[править | править код]
Псевдовектор ε→{\displaystyle {\vec {\varepsilon }}} направлен по касательной к годографу угловой скорости. Действительно, рассмотрим два значения вектора угловой скорости, в момент времени t{\displaystyle t} и в момент времени t+Δt{\displaystyle t+\Delta t}. Оценим изменение угловой скорости за рассматриваемый промежуток времени Δt{\displaystyle \Delta t}

Δω→=ω→(t+Δt)−ω→(t){\displaystyle \Delta {\vec {\omega }}={\vec {\omega }}(t+\Delta t)-{\vec {\omega }}(t)}
Отнесем это изменение к тому промежутку времени, за которое оно произошло
Δω→Δt=ε→′{\displaystyle {\frac {\Delta {\vec {\omega }}}{\Delta t}}={\vec {\varepsilon }}^{\,\,’}}
Получившийся вектор называется вектором среднего углового ускорения. Он занимает положение секущей, пересекая годограф вектора угловой скорости в точках M0{\displaystyle M_{0}} и M1{\displaystyle M_{1}}. Перейдем к пределу при Δt→0{\displaystyle \Delta t\to 0}
limΔt→0Δω→Δt=dω→dt=ε→{\displaystyle \lim _{\Delta t\to 0}{\frac {\Delta {\vec {\omega }}}{\Delta t}}={\frac {d{\vec {\omega }}}{dt}}={\vec {\varepsilon }}}
Вектор среднего углового ускорения перейдет в вектор мгновенного углового ускорения и займет положение касательной в точке M0{\displaystyle M_{0}} к годографу угловой скорости.
Выражение вектора углового ускорения через параметры конечного поворота[править | править код]
При рассмотрении вращения тела через параметры конечного поворота, вектор углового ускорения можно расписать формулой
ε→=(1−cosφ)(u→×d2u→dt2)+φ˙(1+cosφ)du→dt+φ˙sinφ(u→×du→dt)+sinφd2u→dt2+φ¨u→{\displaystyle {\vec {\varepsilon }}=\left(1-\cos \varphi \right)\left({\vec {u}}\times {\frac {d^{2}{\vec {u}}}{dt^{2}}}\right)+{\dot {\varphi }}\left(1+\cos \varphi \right){\frac {d{\vec {u}}}{dt}}+{\dot {\varphi }}\sin \varphi \left({\vec {u}}\times {\frac {d{\vec {u}}}{dt}}\right)+\sin \varphi \,{\frac {d^{2}{\vec {u}}}{dt^{2}}}+{\ddot {\varphi }}\,{\vec {u}}}
где u→{\displaystyle {\vec {u}}} — орт, задающий направление оси поворота; φ{\displaystyle \varphi } — угол, на который совершается поворот вокруг оси u→{\displaystyle {\vec {u}}}.
Угловое ускорение при вращении тела вокруг неподвижной оси[править | править код]
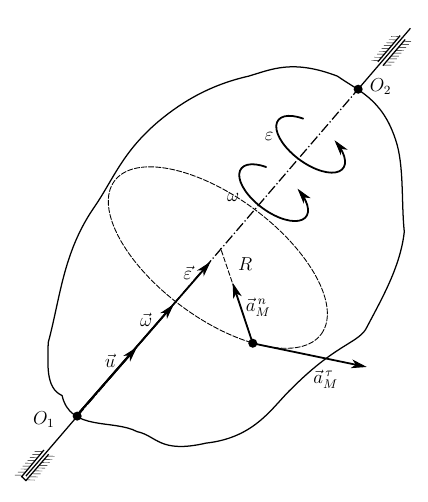
При вращении тела вокруг неподвижной оси, проходящей через неподвижные точки тела O1{\displaystyle O_{1}} и O2{\displaystyle O_{2}}, производные орта оси вращения равны нулю
du→dt=d2u→dt2=0{\displaystyle {\frac {d{\vec {u}}}{dt}}={\frac {d^{2}{\vec {u}}}{dt^{2}}}=0}
В этом случае вектор углового ускорения определяется тривиально через вторую производную угла поворота
ε→=φ¨u→{\displaystyle {\vec {\varepsilon }}={\ddot {\varphi }}\,{\vec {u}}}
или
ε→=εu→{\displaystyle {\vec {\varepsilon }}=\varepsilon \,{\vec {u}}}
где ε=φ¨{\displaystyle \varepsilon ={\ddot {\varphi }}} — алгебраическая величина углового ускорения. В этом случае псевдовектор углового ускорения, как и угловая скорость, направлен вдоль оси вращения тела. Если первая и вторая производные угла поворота имеют одинаковый знак
φ˙φ¨>0{\displaystyle {\dot {\varphi }}\,{\ddot {\varphi }}>0}
то вектор углового ускорения и вектор угловой скорости совпадают по направлению (тело вращается ускоренно). В противном случае, при φ˙φ¨<0{\displaystyle {\dot {\varphi }}\,{\ddot {\varphi }}<0}, векторы угловой скорости и углового ускорения направлены в противоположные стороны (тело вращается замедленно).
В курсе теоретической механики традиционным является подход, при котором понятие угловой скорости и углового ускорения вводится при рассмотрении вращения тела вокруг неподвижной оси. При этом в качестве закона движения рассматривается зависимость от времени угла поворота тела
φ=φ(t){\displaystyle \varphi =\varphi (t)}
В этом случае закон движения точки тела может быть выражен естественным способом, как длина дуги окружности, пройденная точкой при повороте тела от некоторого начального положения φ0=φ(t0){\displaystyle \varphi _{0}=\varphi (t_{0})}
s(t)=R(φ(t)−φ0){\displaystyle s(t)=R\,\left(\varphi (t)-\varphi _{0}\right)}
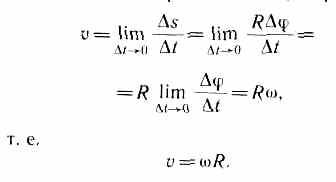
где R{\displaystyle R} — расстояние от точки до оси вращения (радиус окружности, по которой движется точка). Дифференцируя последнее соотношение по времени получаем алгебраическую скорость точки
dsdt=vτ=Rdφdt=ωR{\displaystyle {\frac {ds}{dt}}=v_{\tau }=R\,{\frac {d\varphi }{dt}}=\omega \,R}
где ω=dφdt{\displaystyle \omega ={\frac {d\varphi }{dt}}} — алгебраическая величина угловой скорости. Ускорение точки тела при вращении может быть представлено как геометрическая сумма тангенциального и нормального ускорения
a→M=a→Mτ+a→Mn{\displaystyle {\vec {a}}_{M}={\vec {a}}_{M}^{\,\tau }+{\vec {a}}_{M}^{\,n}}
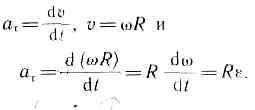
причем тангенциальное ускорение получается как производная от алгебраической скорости точки
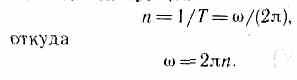
aMτ=dvτdt=ddt(ωR)=Rdωdt=εR{\displaystyle a_{M}^{\,\tau }={\frac {dv_{\tau }}{dt}}={\frac {d}{dt}}\left(\omega \,R\right)=R\,{\frac {d\omega }{dt}}=\varepsilon \,R}
где ε=dωdt=d2φdt2{\displaystyle \varepsilon ={\frac {d\omega }{dt}}={\frac {d^{2}\varphi }{dt^{2}}}} — алгебраическая величина углового ускорения. Нормальное ускорение точки тела может быть вычислено по формулам
aMn=vτ2R=ω2R{\displaystyle a_{M}^{\,n}={\frac {v_{\tau }^{2}}{R}}=\omega ^{2}\,R}
Выражение псевдовектора углового ускорения через тензор поворота тела[править | править код]
Если поворот твёрдого тела задан тензором ранга (1,1){\displaystyle \left(1,\,1\right)} (линейным оператором), выраженным, например, через параметры конечного поворота
Bmp=(1−cosφ)upum+cosφδmp+sinφgplϵlkmuk{\displaystyle B_{\,m}^{\,p}=\left(1-\cos \varphi \right)\,u^{\,p}\,u_{\,m}+\cos \varphi \,\delta _{\,m}^{\,p}+\sin \varphi \,g^{\,pl}\,\epsilon _{\,lkm}\,u^{\,k}}
где δmp{\displaystyle \delta _{\,m}^{\,p}} — символ Кронекера; ϵlkj{\displaystyle \epsilon _{\,lkj}} — тензор Леви-Чивиты, то, псевдовектор углового ускорения может быть вычислен по формуле
εi=12ϵiklglp(Bm′pB¨km+B˙m′pB˙km){\displaystyle \varepsilon ^{\,i}={\frac {1}{2}}\,\epsilon ^{ikl}\,g_{\,lp}\,\left(B_{\,m}^{‘\,p}\,{\ddot {B}}_{\,k}^{\,m}+{\dot {B}}_{\,m}^{‘\,p}\,{\dot {B}}_{\,k}^{\,m}\right)}
где Bm′p{\displaystyle B_{\,m}^{‘\,p}} — тензор обратного преобразования, равный
Bm′p=(1−cosφ)upum+cosφδmp−sinφgplϵlkmuk{\displaystyle B_{\,m}^{‘\,p}=\left(1-\cos \varphi \right)\,u^{\,p}\,u_{\,m}+\cos \varphi \,\delta _{\,m}^{\,p}-\sin \varphi \,g^{\,pl}\,\epsilon _{\,lkm}\,u^{\,k}}
- ↑ В.И. Дронг, В.В. Дубинин, М.М. Ильин и др.; под ред. К.С. Колесникова, В.В. Дубинина. Курс теоретической механики: учебник для вузов. — 2017. — С. 101, 111. — 580 с. — ISBN 978-5-7038-4568-4.
- Тарг С. М. Краткий курс теоретической механики — 10-е изд., перераб. и доп. — М.: Высш. шк., 1986 — 416 С.
- Погорелов Д. Ю. Введение в моделирование динамики систем тел: Учебное пособие. — Брянск: БГТУ, 1997. — 197 С.
§ 4. Угловая скорость и угловое ускорение
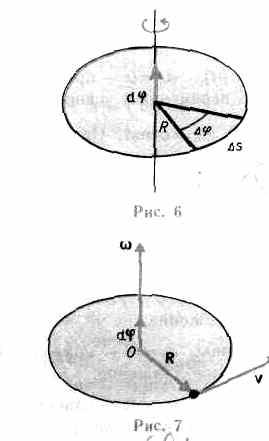
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис.6). Ее положение через промежуток времени t зададим углом . Элементарные (бесконечно малые) углы поворота рассматривают как векторы. Модуль вектора d равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т. е. подчиняется правилу правого, винта (рис.6). Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:

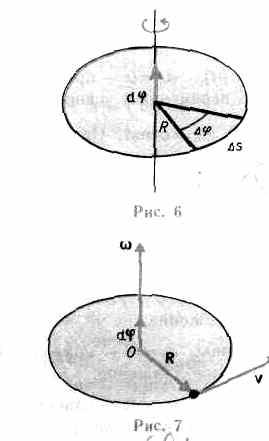
Вектор «в направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор d (рис. 7). Размерность угловой скорости dim=T-1, a . ее единица — радиан в секунду (рад/с).
Линейная скорость точки (см. рис. 6)
В векторном виде формулу для линейной скорости можно написать как векторное произведение:

При
этом модуль векторного произведения,
по определению, равен 
, а направление совпадает с направлением поступательного движения правого винта при его вращении от к R.
Если =const, то вращение равномерное и его можно характеризовать периодом вращения Т — временем, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2. Так как промежутку времени t=T соответствует =2, то = 2/Т, откуда
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:

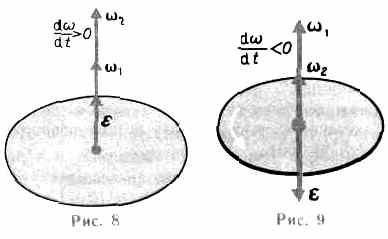
При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор
13
сонаправлен вектору (рис.8), при замедленном.— противонаправлен ему (рис. 9).
Тангенциальная составляющая ускорения
Нормальная составляющая ускорения
Таким образом, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение а, нормальное ускорение аn) и угловыми величинами (угол поворота , угловая скорость (о, угловое ускорение ) выражается следующими формулами:

В случае равнопеременного движения точки по окружности (=const)

где 0 — начальная угловая скорость.
Контрольные вопросы
• Что называется материальной точкой? Почему в механике вводят такую модель?
• Что такое система отсчета?
• Что такое вектор перемещения? Всегда ли модуль вектора перемещения равен отрезку пути,
пройденному точкой?
• Какое движение называется поступательным? вращательным?
• Дать определения векторов средней скорости и среднего ускорения, мгновенной скорости
и мгновенного ускорения. Каковы их направления?
• Что характеризует тангенциальная составляющая ускорения? нормальная составляющая
ускорения? Каковы их модули?
• Возможны ли движения, при которых отсутствует нормальное ускорение? тангенциальное
ускорение? Приведите примеры.
• Что называется угловой скоростью? угловым ускорением? Как определяются их направления?
• Какова связь между линейными и угловыми величинами?
Задачи
1.1. Зависимость пройденного телом пути от времени задается уравнением s =
1.2. Пренебрегая сопротивлением воздуха, определить угол, под которым тело брошено к горизонту, если максимальная высота подъема тела равна 1/4 дальности его полета. [45°]
1.3. Колесо
радиуса R =
0,1 м вращается так, что зависимость
угловой скорости от времени задается
уравнением
= 2At+5Вt
14
1.4. Нормальное ускорение точки, движущейся
по окружности радиуса r=4 м,
задается уравнением аn=А+-Bt+Ct2 (A=1
м/с2, В=6
м/с3, С=3
м/с4).
Определить: 1) тангенциальное ускорение
точки; 2) путь, пройденный точкой за время
t
1.5. Частота вращения колеса при равнозамедленном движении за t=1 мин уменьшилась от 300 до 180 мин-1. Определить: 1) угловое ускорение колеса; 2) число полных оборотов, сделанных колесом за это время. [1) 0,21 рад/с2; 2) 360]
1.6. Диск радиусом R=10 см вращается вокруг неподвижной оси так, что зависимость угла поворота радиуса диска от времени задается уравнением =A+Bt+Ct2+Dt3 (B = l рад/с,
Часть 6 — Кинематика свободного твердого тела. Природа угловой скорости / Habr
- Что такое тензор и для чего он нужен?
- Векторные и тензорные операции. Ранги тензоров
- Криволинейные координаты
- Динамика точки в тензорном изложении
- Действия над тензорами и некоторые другие теоретические вопросы
- Кинематика свободного твердого тела. Природа угловой скорости
- О свертках тензора Леви-Чивиты
- Вывод тензора угловой скорости через параметры конечного поворота. Применяем голову и Maxima
- Получаем вектор угловой скорости. Работаем над недочетами
- Ускорение точки тела при свободном движении. Угловое ускорение твердого тела
- Параметры Родрига-Гамильтона в кинематике твердого тела
- СКА Maxima в задачах преобразования тензорных выражений. Угловые скорость и ускорения в параметрах Родрига-Гамильтона
- Нестандартное введение в динамику твердого тела
- Движение несвободного твердого тела
- Свойства тензора инерции твердого тела
- Зарисовка о гайке Джанибекова
- Математическое моделирование эффекта Джанибекова
Что такое угловая скорость? Скалярная или векторная величина? На самом деле это не праздный вопрос.
Читая лекции по теоретической механике в университете, я, следуя традиционной методике изложения курса кинематики, вводил понятие угловой скорости в теме «Скорость точки тела при вращательном движении». И там угловая скорость впервые появляется как скалярная величина, со следующим определением.
Угловая скорость твердого тела — это первая производная от угла поворота тела по времени
А вот потом, при рассмотрении каноничной формулы Эйлера для скорости точки тела при вращении
обычно дается следующее определение
Угловая скорость тела — это псевдовектор, направленный вдоль оси вращения тела в ту сторону, откуда вращение выглядит происходящим против часовой стрелки
Ещё одно частное определение, которое, во-первых, утверждает неподвижность оси вращения, во-вторых навязывает рассмотрение лишь правой системы координат. И наконец термин «псевдовектор» обычно объясняется студентам так: «Посмотрите, ведь мы показали, что омега — скалярная величина. А вектор мы вводим для того, чтобы выписать формулу Эйлера».
При рассмотрении сферического движения оказывается потом, что ось вращения меняет направление, угловое ускорение направлено по касательной к годографу угловой скорости и так далее. Неясности и вводные допущения множатся.
Учитывая уровень подготовки школьников, а так же вопиющую глупость, допускаемую в программах подготовки бакалавров, когда теормех начинается с первого (вдумайтесь!) семестра, такие постепенные вводные, на палках, веревках и желудях наверное оправданы.
Но мы с вами заглянем, что называется, «под капот» проблемы и, вооружившись аппаратом тензорного исчисления, выясним, что угловая скорость — это псевдовектор, порождаемый антисимметричным тензором второго ранга.
Думаю для затравки вполне достаточно, а поэтому — начнем!
Итак, как известно из традиционного вузовского курса теормеха
Если движение, совершаемо телом не ограничено связями, то такое его движение называют свободным
Это — самый общий случай движения тела. Следующий рисунок иллюстрирует тот факт, что свободное движение тела можно представить как сумму двух движений: поступательного вместе с полюсом и сферического вокруг полюса.
Рис. 1. Обычная иллюстрация из курса теоретической механики: определение положения свободного твердого тела в пространстве.
Напомню, что речь идет об абсолютно твердом теле, то есть теле, расстояния между точками которого не изменяется с течением времени. Ещё можно сказать, что твердое тело представляет собой неизменяемую механическую систему.
Как видно из рисунка 1, обычной практикой является рассмотрение двух систем координат — одна считается неподвижной и называется базовой, другая жестко связанна с телом и поворачивается относительно базовой вместе с ним. Такую систему координат называют связанной.
Сначала я тоже хотел ограничиться декартовыми координатами. Но тогда бы мои читатели задали бы мне логичный вопрос — «а зачем тогда тут тензоры?». Поэтому, потратив четыре для в мучительных раздумьях и «нагуляв» окончательное решение пару часов назад, я решил замахнуться на «Вильяма, нашего, Шекспира» и изложить дальнейшие рассуждения в криволинейных координатах.
Рис. 2. Ориентация твердого тела в локальном базисе.
Пусть положение полюса задается вектором
Причем под этим вектором не следует понимать радиус-вектор, так как в криволинейных координатах такое понятие бессмысленно.
В точке O1 задан локальный репер базовой системы координат, образованный тройкой векторов . С движущимся телом связан подвижный репер . Поворот связанного репера относительно базового можно задать линейным оператором. Получим этот оператор и исследуем его свойства
Рассмотрим некоторую точку M, принадлежащую телу. К ней из полюса можно провести вектор неподвижный относительно связанного репера. Его можно разложить по векторам этого репера
и по векторам базового репера
Каждый вектор связанного репера можно разложить через векторы базового репера
Подставляем (4) в (2) и сравниваем с (3)
Из (5) понятно, что компоненты вектора в базовой системе координат, пересчитываются через его компоненты в связанной системе путем применения линейного оператора
или в безиндексной форме
где столбцы матрицы
– контравариантные компоненты векторов связанного репера по отношению к базовому. Точка, как мы уже отмечали в прошлой статье, обозначает умножение тензоров с последующей сверткой по соседней паре индексов. Линейный оператор
действует на векторы таким образом, что поворачивает их относительно некоторой оси, не меняя длины и угла между векторами. Такое преобразование пространства называется ортогональным. Для того, чтобы таковое преобразование было возможным, оператор (7) должен обладать вполне определенными свойствами. Если длина векторов базиса и углы между ними не меняются, то это означает равенство всех попарных скалярных произведений векторов репера как в базовой, так и в связанной системах координат
Правая часть (8) — это локальный метрический тензор
или
Оператор является по сути обыкновенной матрицей поворота координатной системы. И (10) утверждает, что если транспонированную матрицу поворота умножить на метрический тензор, а результат умножить на матрицу поворота мы получим снова метрический тензор. Можно сделать вывод, что
Преобразование координат при повороте является тождественным для метрического тензора, то есть переводит метрический тензор сам в себя.
В выражении (10) нетрудно увидеть преобразование метрического тензора про смене системы координат, о котором мы подробно говорили в самой первой статье цикла
Стоп! Но мы же знаем, что матрицы поворота обычно ортогональны, то есть произведение матрицы поворота на её транспонированную дает единичную матрицу, иными словами, чтобы обратить матрицу поворота её достаточно транспонировать.
Но ортогональность свойственна матрицам поворота, преобразующим ортонормированный декартов базис. Здесь мы имеем дело с локальным базисом, при повороте которого должны сохранятся длины векторов и углы между ними. Если мы примем базис декартовым, то из (10) мы получим привычные свойства матрицы поворота, к примеру её ортогональность.
Для дальнейших вычислений нам потребуется знать, как будет выглядеть матрица обратного преобразования, то есть . Что же, посмотрим. Для этого умножим (10) слева на и справа на
откуда незамедлительно получаем
Выходит, что матрица обратного преобразования действительно получается из транспонированной матрицы преобразования, но с участием метрического тензора. Выражения (10) и (11) очень пригодятся нам, а пока сделаем некоторые выводы.
Закон свободного движения твердого тела можно выписать в криволинейных координатах в виде системы уравнений
При этом (12) — закон движения полюса, а (13) — закон сферического движения тела вокруг полюса. При этом (13) — тензор ранга (1,1), называемый тензором поворота.
Вычислим скорость точки M, положение которой в связанной системе координат задается постоянными, в силу твердости тела, криволинейными координатами
Из курса теоретической механики известна формула, определяющая скорость точки тела в данном движении
где — скорость полюса; — скорость точки вокруг полюса.
Так как все координаты, кроме (13) определены относительно базового репера, мы можем записать
Индекс в круглых скобках означает систему координат, в которой берутся компоненты (0 — базовая, 1 — связанная). Дифференцируем (15) по времени с учетом (13)
Перейдем в (16) к связанной системе координат, домножив (15) слева на
где — компонента оператора обратного преобразования .
Теперь сравним (17) и (14). В последнем слагаемом должно вылезти векторное произведение. Вспоминая определение векторного произведения через тензор Леви-Чивиты, данное во второй статье цикла, замечаем, что на выходе оно дает ковектор, поэтому в (17) перейдем к ковариантым компонентам, домножив это выражение на метрический тензор слева
Теперь представим себе, как выглядел бы ковектор скорости точки относительно плюса, записанный через вектор угловой скорости
при этом замечая, что
антисимметричный тензор второго ранга, о котором мы говорили в прошлой статье<. Таким образом, нам бы доказать, что
является антисимметричным тензором второго ранга. Для этого придется доказать, что (19) меняет знак при перестановка индексов (транспонировании). При этом будем учитывать, что метрический тензор — абсолютно симметричный тензор второго ранга и при транспонировании он не меняется. Поэтому исследуем взаимосвязи между матрицами поворота, для чего нам потребуются выражения (10) и (11). Но прежде чем приступить, докажем ещё одно вспомогательное утверждение
Ковариантная производная метрического тензора равна нулю
Обратимся к понятию ковариантной производной вектора, о которой упоминалось в третьей статье. Тогда мы вывели выражения для контравариантных компонент ковариантной производной от вектора
Как как и любой вектор, компоненты данного вектора можно трансформировать в ковариантные умножением и сверткой с метрическим тензором
А можно продифференцировать ковариантные компоненты непосредственно
Сравнивая (21) и (20) мы приходим к выводу, что равенство возможно лишь в случае если верно утверждение леммы
Теперь, перепишем (19) в безиндексном виде, учтя уравнение (11)
Далее, нам нужна связь между оператором поворота и его производной — дифференцируем (10) по времени
или, собирая производные от метрического тензора в правой части
Но, производные от метрического тензора в (24) будут равны нулю, в силу равенства нулю ковариантной производной метрического тензора. Значит правая часть (24) равна нулю
Пользуясь свойствами операции транспонирования, преобразуем (25)
Так как и с учетом (23), получаем
Из (26) непосредственно следует антисимметричность тензора (19)
Ну а коль скоро (19) антисимметричный тензор, то мы смело переписываем (18)
Таким образом мы приходим к выводу, что (19) и (23) есть ни что иное как антисимметричный тензор угловой скорости
Любому антисимметричному тензору можно поставить в соответствие псевдовектор, который мы уже получали в предыдущей статье. Повторим этот результат для тензора угловой скорости
Возможно читателю знаком распространенный подход замены векторного произведения на умножение кососимметричной матрицы, построенной из первого вектора по определенному правилу, на второй вектор. Так вот это правило получается естественным путем, если в качестве инструмента использовать тензорное исчисление. Действительно, вот эта кососимметричная матрица, которой в матричном изложении механики заменяют угловую скорость
Возможно, внимательный читатель увидит, что в полученной матрице знаки противоположны тем, что мы получали в статье, посвященной антисимметричным тензорам. Да, все верно, ведь в той статье мы сворачивали вектор с тензором Леви-Чивиты по его третьему индексу k, тут мы выполняем свертку по среднему индексу j что дает прямо противоположные знаки.
Матрица (30) частенько встречается в литературе, в частности в трудах Д. Ю. Погорелова, но там она вводится как мнемоническое правило. Формула (29) дает четкую связь между вектором угловой скорости и кососимметричной матрицей. Она же дает возможность перейти от (28) к формуле
Что, внезапно, эквивалентно векторному соотношению
В этой статье было много математики. И я вынужден пока ограничится этим материалом — статья вышла длинной и насыщенной формулами. Данная тема будет продолжена и углублена в следующих статьях цикла.
Какой же вывод мы можем сделать сейчас? А вот какой
Угловая скорость твердого тела есть антисимметричный тензор, или, соответствующий ему псевдовектор, порождаемый тензором поворота тела относительно базовой системы координат
Для того чтобы написать эту работу потребовалось перелопатить гору литературы. Основные выкладки выполнены автором самостоятельно. Камнем преткновения были матрицы поворота для случая косоугольных координат. Я не сразу разглядел в соотношении (10) преобразование, оставляющее метрику инвариантной, хотя с учетом ранее написанных статей — следовало бы. Понять эту связь мне помог ужасный по оформлению, но очень толковый сайт «На что похожа математика». Кстати видно, что все соотношения переходят в известные для ортогональных матриц, если метрический тензор сделать единичным.
Разговор о механике твердого тела будет продолжен, а пока — всё. Спасибо за внимание!
Продолжение следует…
Кинематика абсолютно твёрдого тела. Угловая скорость. Связь между линейной и угловой скоростями
Кинематика абсолютно твёрдого тела. Угловая скорость. Связь между линейной и угловой скоростями
«Физика — 10 класс»
Угловая скорость.
Каждая точка тела, вращающегося вокруг неподвижной оси, проходящей через точку О, движется по окружности, и различные точки проходят за время Δt разные пути. Так, АА1 > ВВ1 (рис. 1.62), поэтому модуль скорости точки А больше, чем модуль скорости точки В. Но радиус-векторы, определяющие положение точек А и В, поворачиваются за время Δt на один и тот же угол Δφ.
Угол φ — угол между осью ОХ и радиус-вектором определяющим положение точки А (см. рис. 1.62).
Пусть тело вращается равномерно, т. е. за любые равные промежутки времени радиус-векторы поворачиваются на одинаковые углы.
Чем больше угол поворота радиус-вектора, определяющего положение какой-то точки твёрдого тела, за определённый промежуток времени, тем быстрее вращается тело и тем больше его угловая скорость.
Угловой скоростью тела при равномерном вращении называется величина, равная отношению угла поворота тела υφ к промежутку времени υt, за который этот поворот произошёл.
Будем обозначать угловую скорость греческой буквой ω (омега). Тогда по определению
Угловая скорость в СИ выражается в радианах в секунду (рад/с). Например, угловая скорость вращения Земли вокруг оси 0,0000727 рад/с, а точильного диска — около 140 рад/с.
Угловую скорость можно связать с частотой вращения.
Частота вращения — число полных оборотов за единицу времени (в СИ за 1 с).
Если тело совершает ν (греческая буква «ню») оборотов за 1 с, то время одного оборота равно 1/ν секунд.
Время, за которое тело совершает один полный оборот, называют периодом вращения и обозначают буквой Т.
Таким образом, связь между частотой и периодом вращения можно представить в виде
Полному обороту тела соответствует угол Δφ = 2π. Поэтому согласно формуле (1.26)
Если при равномерном вращении угловая скорость известна и в начальный момент времени t0 = 0 угол φ0 = 0, то угол поворота радиус-вектора за время t согласно уравнению (1.26)
φ = ωt.
Если φ0 ≠ 0, то φ — φ0 = ωt, или φ = φ0 ± ωt.
Радиан равен центральному углу, опирающемуся на дугу, длина которой равна радиусу окружности, 1 рад = 57°17’48». В радианной мере угол равен отношению длины дуги окружности к её радиусу: φ = l/R.
Угловая скорость принимает положительные значения, если угол между радиус-вектором, определяющим положение одной из точек твёрдого тела, и осью ОХ увеличивается (рис. 1.63, а), и отрицательные, когда он уменьшается (рис. 1.63, б).
Тем самым мы можем найти положение точек вращающегося тела в любой момент времени.
Связь между линейной и угловой скоростями.
Скорость точки, движущейся по окружности, часто называют линейной скоростью, чтобы подчеркнуть её отличие от угловой скорости.
Мы уже отмечали, что при вращении абсолютно твёрдого тела разные его точки имеют неодинаковые линейные скорости, но угловая скорость для всех точек одинакова.
Установим связь между линейной скоростью любой точки вращающегося тела и его угловой скоростью. Точка, лежащая на окружности радиусом R, за один оборот пройдёт путь 2πR. Поскольку время одного оборота тела есть период Т, то модуль линейной скорости точки можно найти так:
Так как ω = 2πν, то
Из этой формулы видно, что, чем дальше расположена точка тела от оси вращения, тем больше её линейная скорость. Для точек земного экватора υ = 463 м/с, а для точек на широте Санкт-Петербурга υ = 233 м/с. На полюсах Земли υ = 0.
Модуль центростремительного ускорения точки тела, движущейся равномерно по окружности, можно выразить через угловую скорость тела и радиус окружности:
Следовательно,
ацс = ω2R.
Запишем все возможные расчётные формулы для центростремительного ускорения:
Мы рассмотрели два простейших движения абсолютно твёрдого тела — поступательное и вращательное. Однако любое сложное движение абсолютно твёрдого тела можно представить как сумму двух независимых движений: поступательного и вращательного.
На основании закона независимости движений можно описать сложное движение абсолютно твёрдого тела.
Источник: «Физика — 10 класс», 2014, учебник Мякишев, Буховцев, Сотский
Кинематика — Физика, учебник для 10 класса — Класс!ная физика
Физика и познание мира — Что такое механика — Механическое движение. Система отсчёта — Способы описания движения — Траектория. Путь. Перемещение — Равномерное прямолинейное движение. Скорость. Уравнение движения — Примеры решения задач по теме «Равномерное прямолинейное движение» — Сложение скоростей — Примеры решения задач по теме «Сложение скоростей» — Мгновенная и средняя скорости — Ускорение — Движение с постоянным ускорением — Определение кинематических характеристик движения с помощью графиков — Примеры решения задач по теме «Движение с постоянным ускорением» — Движение с постоянным ускорением свободного падения — Примеры решения задач по теме «Движение с постоянным ускорением свободного падения» — Равномерное движение точки по окружности — Кинематика абсолютно твёрдого тела. Поступательное и вращательное движение — Кинематика абсолютно твёрдого тела. Угловая скорость. Связь между линейной и угловой скоростями — Примеры решения задач по теме «Кинематика твёрдого тела»
§ 4. Угловая скорость и угловое ускорение
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис.6). Ее положение через промежуток времени t зададим углом . Элементарные (бесконечно малые) углы поворота рассматривают как векторы. Модуль вектора d равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т. е. подчиняется правилу правого, винта (рис.6). Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:
Вектор «в направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор d (рис. 7). Размерность угловой скорости dim=T-1, a . ее единица — радиан в секунду (рад/с).
Линейная скорость точки (см. рис. 6)
В векторном виде формулу для линейной скорости можно написать как векторное произведение:

При
этом модуль векторного произведения,
по определению, равен 
, а направление совпадает с направлением поступательного движения правого винта при его вращении от к R.
Если =const, то вращение равномерное и его можно характеризовать периодом вращения Т — временем, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2. Так как промежутку времени t=T соответствует =2, то = 2/Т, откуда
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:

Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:

При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор
13
сонаправлен вектору (рис.8), при замедленном.— противонаправлен ему (рис. 9).
Тангенциальная составляющая ускорения

Нормальная составляющая ускорения
Таким образом, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение а, нормальное ускорение аn) и угловыми величинами (угол поворота , угловая скорость (о, угловое ускорение ) выражается следующими формулами:

В случае равнопеременного движения точки по окружности (=const)

где 0 — начальная угловая скорость.
Контрольные вопросы
• Что называется материальной точкой? Почему в механике вводят такую модель?
• Что такое система отсчета?
• Что такое вектор перемещения? Всегда ли модуль вектора перемещения равен отрезку пути,
пройденному точкой?
• Какое движение называется поступательным? вращательным?
• Дать определения векторов средней скорости и среднего ускорения, мгновенной скорости
и мгновенного ускорения. Каковы их направления?
• Что характеризует тангенциальная составляющая ускорения? нормальная составляющая
ускорения? Каковы их модули?
• Возможны ли движения, при которых отсутствует нормальное ускорение? тангенциальное
ускорение? Приведите примеры.
• Что называется угловой скоростью? угловым ускорением? Как определяются их направления?
• Какова связь между линейными и угловыми величинами?
Задачи
1.1. Зависимость пройденного телом пути от времени задается уравнением s = A+Вt+Сt2+Dt3 (С = 0,1 м/с2, D = 0,03 м/с3). Определить: 1) через какое время после начала движения ускорение а тела будет равно 2 м/с2; 2) среднее ускорение <а> тела за этот промежуток времени. [ 1) 10 с; 2) 1,1 м/с2]
1.2. Пренебрегая сопротивлением воздуха, определить угол, под которым тело брошено к горизонту, если максимальная высота подъема тела равна 1/4 дальности его полета. [45°]
1.3. Колесо радиуса R = 0,1 м вращается так, что зависимость угловой скорости от времени задается уравнением = 2At+5Вt4 (A=2 рад/с2 и B=1 рад/с5). Определить полное ускорение точек обода колеса через t=1 с после начала вращения и число оборотов, сделанных колесом за это время. [а = 8,5 м/с2; N = 0,48]
14
1.4. Нормальное ускорение точки, движущейся по окружности радиуса r=4 м, задается уравнением аn=А+-Bt+Ct2 (A=1 м/с2, В=6 м/с3, С=3 м/с4). Определить: 1) тангенциальное ускорение точки; 2) путь, пройденный точкой за время t1=5 с после начала движения; 3) полное ускорение для момента времени t2=1 с. [ 1) 6 м/с2; 2) 85 м; 3) 6,32 м/с2]
1.5. Частота вращения колеса при равнозамедленном движении за t=1 мин уменьшилась от 300 до 180 мин-1. Определить: 1) угловое ускорение колеса; 2) число полных оборотов, сделанных колесом за это время. [1) 0,21 рад/с2; 2) 360]
1.6. Диск радиусом R=10 см вращается вокруг неподвижной оси так, что зависимость угла поворота радиуса диска от времени задается уравнением =A+Bt+Ct2+Dt3 (B = l рад/с, С=1 рад/с2, D=l рад/с3). Определить для точек на ободе колеса к концу второй секунды после начала движения: 1) тангенциальное ускорение а; 2) нормальное ускорение аn; 3) полное ускорение а. [ 1) 0,14 м/с2; 2) 28,9 м/с2; 3) 28,9 м/с2]
Что такое угловая скорость и как ее рассчитывают?
Обычно, когда говорят о перемещении, мы представляем себе объект, который движется по прямой. Скорость такого движения принято называть линейной, и расчёт ее средней величины выполняется просто: достаточно найти отношение пройденного расстояния к времени, за которое оно было телом преодолено. Если же объект перемещается по окружности, то в этом случае уже определяется не линейная, а угловая скорость. Что это за величина и как ее рассчитывают? Об этом как раз и пойдет разговор в данной статье.

Угловая скорость: понятие и формула
Когда материальная точка движется по окружности, быстроту ее перемещения можно характеризовать величиной угла поворота радиуса, который соединяет движущийся объект с центром данной окружности. Понятно, что эта величина в зависимости от времени постоянно меняется. Быстрота, с которой этот процесс происходит, и есть не что иное, как угловая скорость. Другими словами, это отношение величины отклонения радиус-вектора объекта к промежутку времени, которое потребовалось объекту на совершение такого поворота. Формула угловой скорости (1) может быть записана в таком виде:
w = φ / t, где:
φ – угол поворота радиуса,
t – период времени вращения.

Единицы измерения величины
В международной системе общепринятых единиц (СИ) для характеристики поворотов принято использовать радианы. Поэтому 1 рад/с – основная единица, которая используется в расчетах угловой скорости. В то же время никто не запрещает применять градусы (напомним, что один радиан равен 180/пи, или 57˚18’). Также угловая скорость может выражаться в числе оборотов за минуту или за секунду. Если перемещение по окружности происходит равномерно, то данная величина может быть найдена по формуле (2):
w = 2π*n,
где n – частота вращения.
В противном случае подобно тому, как это делают для обычной скорости, рассчитывают среднюю, или мгновенную угловую скорость. Следует отметить, что рассматриваемая величина является векторной. Для определения ее направления обычно используют правило буравчика, которое часто применяется в физике. Вектор угловой скорости направлен в ту же сторону, в которую происходит поступательное движение винта с правой резьбой. Другими словами, он устремлен вдоль оси, вокруг которой вращается тело, в ту сторону, откуда вращение видно происходящим против движения часовой стрелки.
Примеры расчета
Предположим, требуется определить, чему равна линейная и угловая скорость колеса, если известно, что его диаметр равен одному метру, а угол вращения изменяется в соответствии с законом φ=7t. Воспользуемся нашей первой формулой:
w = φ / t = 7t / t = 7 с-1.
Это и будет искомая угловая скорость. Теперь перейдем к поиску привычной нам быстроты перемещения. Как известно, v = s / t. Учитывая, что s в нашем случае – это длина окружности колеса (l =2π*r), а 2π — один полный оборот, получается следующее:
v = 2π*r / t = w * r = 7 * 0.5 = 3.5 м/с
Вот еще одна задачка на эту тему. Известно, что радиус Земли на экваторе равен 6370 километров. Требуется определить линейную и угловую быстроту движения точек, находящихся на этой параллели, которое возникает в результате вращения нашей планеты вокруг своей оси. В данном случае нам понадобится вторая формула:
w = 2π*n = 2*3,14 *(1/(24*3600)) = 7,268 *10-5 рад/с.
Осталось выяснить, чему равна линейная скорость: v = w*r = 7,268 *10-5 *6370 * 1000 = 463 м/с.