


Бесколлекторный двигатель постоянного тока: особенности и принцип работы
Как работает бесколлекторный двигатель?
Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя.
Заказать бесколлекторный двигатель в нашем каталоге
В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток. Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.

Возможные варианты и специальные случаи
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера). Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.

Ещё одно отличие, по которому разделяются различные модели двигателей – это взаимное расположение ротора и статора – существуют двигатели с внутренним ротором и двигатели с внешним ротором. Двигатели с внутренним ротором, как правило, имеют более высокие скорости и меньший момент инерции ротора, чем модели с внешним ротором. Благодаря этому двигатели с внутренним ротором имеют более высокую динамику. Двигатели с внешним ротором часто имеют несколько больший номинальный момент при том же наружном диаметре двигателя.
Отличия от других типов двигателей
Отличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами. По этой же причине скорость у бесколлекторных двигателей, как правило, значительно выше, чем у ДПТ с постоянными магнитами. С одной стороны это позволяет увеличить удельную мощность бесколлекторного двигателя, с другой стороны не для всех применений такая высокая скорость является действительно необходимой
Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера. Кроме того синхронные двигатели предполагают питание напряжением синусоидальной формы в то время как бесколлекторные двигатели допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже предполагают его использование в номинальных режимах работы.
Когда нужен бесколлекторный двигатель?
Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью. Для применений, где требуется максимально простое управление двигателем (без использования контроллера двигателя) естественным выбором будет коллекторный ДПТ.
С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.
Как работает бесколлекторный мотор — HPI Racing
HPI предлагает для всех типов радиоуправляемых электроавтомоделей великолепную бесколлекторную систему Flux Brushless System! Бесколлекторная система Flux идеально подходит для шоссейных автомоделей, моделей багги и внедорожников в масштабе 1/10 и позволяет разогнать эти машины до скорости почти 100 километров в час!
Flux Brushless System состоит из электронного регулятора скорости и бесколлекторного двигателя.
Бесколлекторный двигатель — это лучший выбор почти для всех электроавтомоделей в масштабе 1/10. С таким мотором ваша модель станет сверхбыстрой на трассе и сможет развивать бешенную скорость! Со стандартным никель-металлогидридным аккумулятором, состоящим из 6-и элементов, или с 2S LiPo (7,4 вольт) аккумулятором вы можете получить до 60 км/ч даже со стандартным редуктором! Мощность бесколлекторного мотора Flux эквивалентна высокофорсированным коллекторным 9 – 10 витковым двигателям, работающих от шести элементных NiMH батарей, а это огромная мощность!

Особенности бесколлекторных двигателей Flux:
- Мощный, высокоскоростной бесколлекторныый мотор – эквивалент коллекторного 9,5 виткового двигателя.
- Отлично сочетание огромной мощности и необычайной эффективности.
- Такой же размер, как у стандартного мотора 540-го типа.
- Необслуживаемая конструкция.
- Внешние контакты для легкой перепайки проводов.
- Крупногабаритные шарикоподшипники.
- Высокий крутящий момент, термостойкий неодимовый ротор.
- Специальная конструкция статора обеспечивает плавное линейное увеличение крутящего момента.
- Простой и удобный монтаж через 4 точки.
- Ресурс в разы больше, чем в сопоставимых коллекторных моторах.
- Легко заменяемые подшипники и ротор.
- Совместим с любым бездатчиковым регулятором скорости для бесколлекторных двигателей.
Электронный регулятор скорости — «мозг» системы Flux. Регулятор скорости серии Fluxимеет разъемы для подключения мотора, разъем типа Dean для подключения и трехжильный кабель с разъемом для соединения с приемником, так что вы сможете легко установить регулятор в любом удобном месте на вашей модели. Регулятор способен работать с бесколлекторными двигателями разных размеров и мощности, а так же совместим как с NiMH аккумуляторами, так и LiPo батареями, что позволяет получить максимальную мощность от вашей системы Flux Brushless System! Регулятор Flux — небольшой по размеру, но огромный по допустимой мощности! На сайте HPI вы можете получить рекомендации по программированию регулятора скорости с помощью компьютера!

Особенности регулятора скорости Flux:
- Программируемый электронный регулятор скорости с функцией заднего хода для бесколлекторных / коллекторных электродвигателей.
- Отсечка при низком напряжении для LiPo аккумуляторов**
- Эффективный алюминиевый радиатор.
- Пропорциональный тормоз с контролем усилия.
- Огромная рабочая мощность (70A * непрерывно / 380A в пике).
- Плавный старт бездатчиковых двигателей (патенты находятся на рассмотрении)
- Dean’s разъем для подключения батареи.
- Надежный выключатель.
- Просто программируется.
- Возможность легко настроить параметры с помощью кабеля HPI link (в комплект не входит).
- Работает с бесколлекторными и стандартными коллекторными двигателями.
Система Flux Brushless System, разработанная HPI, предназначена для любителей и спортсменов, которые хотят иметь мощную, универсальную и доступную бесколлекторную систему. Двигатели Flux чрезвычайно мощные, очень надежные и эффективные, а это самой легкий путь к победе! У бездатчиковых двигателей HPI гораздо меньше проводов, которые можно повредить во время гонки, и это избавляет вас от лишних забот. Вы можете приобрести двигатель в комплекте с регулятором скорости или купить их по отдельности!

Перспективы модернизации
Владельцы Flux Motiv могут обновлять параметры регулятора с помощью компьютера и бесплатного программного обеспечения! Программисты постоянно делают обновления программного обеспечения Flux Motive и вы можете загружать их, используя набор HPI PC USB programming kit. Этот комплект позволяет подключить регулятор скорости прямо к компьютеру, работающему под Windows, и сохранить настройки профиля, внести изменения в настройки, обновить прошивку и многое другое!

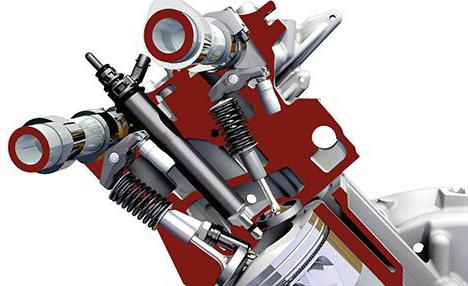
Давайте сначала узнаем, как работает коллекторный двигатель.
Чтобы узнать, почему бесколлекторные двигатели настолько эффективны и имеют высокую мощность, необходимо знать, как работает стандартный коллекторный мотор.
Обычные коллекторные электродвигатели, которые вы можете найти в машинахSprint 2 или E-Firestorm имеют всего два провода (положительный и отрицательный), которыми двигатель подключается к регулятору скорости. Внутри корпуса двигателя можно увидеть два изогнутых постоянных магнита, а по центру установлен вал с якорем, на котором намотаны обмотки из медной проволоки. С одной стороны вала якоря устанавливается моторная шестерня, с другой стороны вала расположен так называемый коллектор из медных пластин, через который с помощью угольных щеток ток подается к обмоткам якоря.
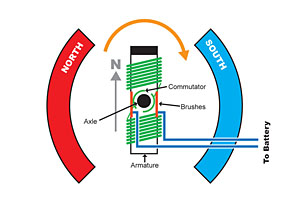
Две угольные щетки постоянно скользят по вращающемуся медному коллектору. Как вы можете видеть на рисунке выше, напряжение по проводам через щетки и коллектор поступает к обмоткам якоря, возникает электромагнитное поле, которое взаимодействует с постоянными магнитами статора и заставляет якорь вращаться.
Как начинает вращаться стандартный коллекторный
двигатель.
Когда на обмотки якоря поочередно поступает постоянный
электрический ток, в них возникает электромагнитное поле,
которое с одной стороны имеет «северный» а с другой
«южный» полюс. Поскольку «северный» полюс
любого магнита автоматически отталкиваются от
«северного» полюса другого магнита,
электромагнитное поле одной из обмоток якоря, взаимодействуя с
полюсами постоянных магнитов статора, заставляет якорь вращаться.
Через коллектор и щетки ток поступает на следующую обмотку якоря,
что заставляет якорь вместе с валом мотора продолжать вращение, и
так до тех пор, пока к мотору подается напряжение. Как
правило, якорь коллекторного мотора имеет три обмотки (три полюса)
— это не позволяет двигателю застревать в одном положении.
Недостатки стандартных коллекторных
двигателей
Недостатки коллекторных двигателей выявляются, когда
нужно получить огромное количество
оборотов от них. Поскольку
щетки должны постоянно находиться в контакте с
коллектором, в месте их соприкосновения возникает трение,
которое значительно увеличивается, особенно на высоких
оборотах. Любой дефект коллектора
приводит к значительному износу щеток и нарушению контакта, что в
свою очередь снижает эффективность мотора.
Именно поэтому серьезные гонщики
протачивают и полируют коллектор двигателя и меняют
щетки почти после каждого
заезда. Коллекторный узел стандартного
мотора так же является источником радиопомех и требует особого
внимания и обслуживания.
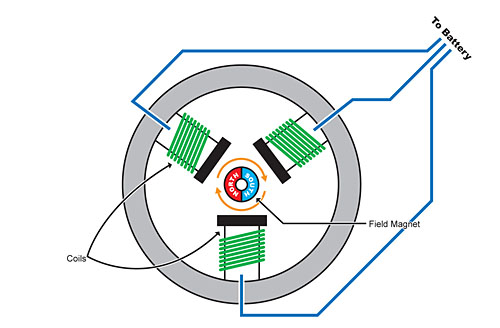
Теперь посмотрим, как работает бесколлекторный
двигатель.
Основной особенностью
конструкции бесколлекторного двигателя является то, что он по
принципу работы похож на коллекторный мотор, но все устроено как
бы «наизнанку», и в нем отсутствуют коллектор и щетки.
Постоянные магниты, которые в коллекторном моторе установлены на
неподвижном статоре, у бесколлекторного мотора расположены вокруг
вала, и этот узел называется ротор. Проволочные обмотки
бесколлекторного мотора размещены вокруг ротора и имеют несколько
различных магнитных полюсов. Датчиковые бесколлекторные моторы
имеют на роторе сенсор, который посылает сигналы о положении ротора
в процессор электронного регулятора скорости.
Почему бесколлекторный двигатель эффективней, чем
коллекторный мотор
Из-за отсутствия коллектора и щеток в бесколлекторном моторе нет
изнашивающихся деталей, кроме шарикоподшипников ротора, а это
автоматически делает его более эффективным и надежным. Наличие
сенсора контроля вращения ротора также значительно повышает
эффективность. У коллекторных двигателей не возникает искрения
щеток, что резко снижает возникновение помех, а отсутствие узлов с
повышенным трением благоприятно сказывается на температуре
работающего мотора, что так же повышает его эффективность.
Существуют ли недостатки у бесколлекторных
двигателей?
Единственный возможный недостаток бесколлекторной системы –
это несколько более высокая стоимость, однако каждый, кто испытал
высокую мощность бесколлекторной системы, почувствовал прелесть
отсутствия необходимости периодической замены щеток, пружин,
коллекторов и якорей, тот быстро оценит общую экономию и не
вернется к коллекторным моторам … никогда!
Действительно ли бесколлекторный двигатель не требует
«никакого обслуживания?
Да! Они таковы, экономят время, поэтому гонщики всего мира теперь с
удовольствием могут передохнуть между заездами. Вам больше не
придется после каждой гонки демонтировать двигатель, разбирать его,
шлифовать коллектор, менять щетки, вновь собирать и заново
устанавливать … отсутствие этих забот — это огромное
удовольствие!
Единственное, что вам возможно потребуется делать, это содержать двигатель в чистоте, и при необходимости менять подшипники. Эти процедуры выполняются редко, так что их нельзя классифицировать как регулярное техническое обслуживание.
Почему без датчика?
Помимо базовых размеров и различных параметров, бесколлекторные
двигатели могут подразделяться по типу: с датчиком и без датчика.
Двигатель с датчиком используют очень маленький сенсор на роторе и
кроме трех толстых кабелей, по которому мотор получает питание,
имеют дополнительный шлейф из тонких проводов, которые соединяют
двигатель с регулятором скорости. Дополнительные провода передают
информацию с датчика о положении ротора сотни раз в секунду. Эта
информация обрабатывается электронным регулятором скорости, что
позволяет мотору работать плавно и эффективно, насколько это
возможно. Такие моторы используют профессиональные гонщики, однако
такие двигатели намного дороже и сложнее в использовании.
Бездатчиковая бесколлекторная система, как можно догадаться, не имеет датчиков и дополнительных проводов, а ротор таких двигателей вращается без точной регистрации его положения и оборотов регулятором скорости. Это позволяет сделать двигатель и регулятор скорости проще в изготовлении, проще в установке и в целом дешевле. Бездатчиковые системы способны обеспечить такую же мощность, как датчиковые, просто с чуть-чуть меньшей точностью, а это идеальное решение для любителей и начинающих спортсменов.
В HPI пришли к выводу, что нашим клиентам не нужна точность, которая доступна для датчиковых систем, для них важнее надежность, и мы решили использовать популярную бездатчиковую систему для комплектов серии Flux.
Мы надеемся, что данная статья объяснит все, что вам нужно знать о системе HPI Flux Brushless.
Бесколлекторный электродвигатель — это… Что такое Бесколлекторный электродвигатель?
Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что коллектор такого двигателя обычно питается от постоянного напряжения.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
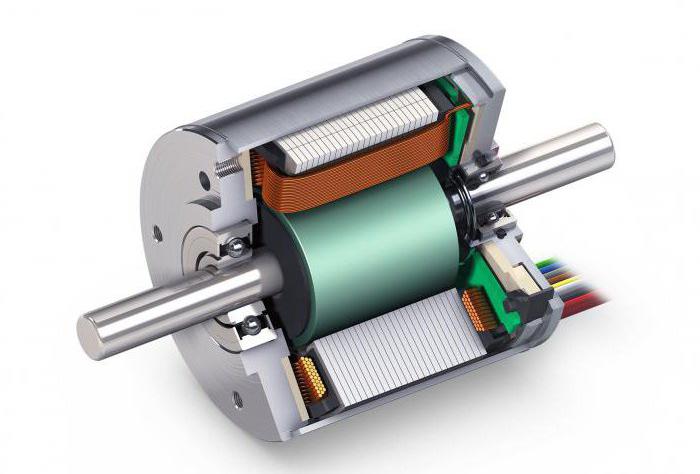
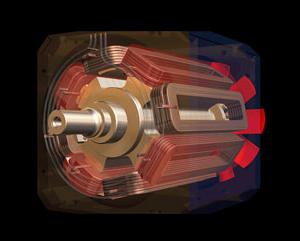
Статор
Статор бесколлекторного электродвигателяСтатор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке 1 (желтая точечка). Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера, в связи с большим количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент, действующий на ротор, меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 %)
 | Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
- Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
Для применений, комбинирующих максимально достижимый КПД с предельно простыми и надёжными блоками управления (ключевой коммутатор, не использующий ШИМ), можно также выделить следующую особенность: Несмотря на то, что обороты могут широко варьироваться управляющим блоком, приемлемый КПД можно получить лишь в относительно узком интервале угловых скоростей. Это определяется индуктивностью обмоток. Если скорость будет ниже оптимальной, продолжающаяся подача тока в данную фазу, после достижения предела магнитного потока, будет приводить лишь к ненужному нагреву. На скоростях выше оптимальной, магнитный поток в полюсе не достигнет максимума из-за ограниченного индуктивностью времени нарастания тока. Примерами таких двигателей являются модельные бесколлекторные комплекты. Они должны быть эффективными, лёгкими и надёжными, а для того чтобы обеспечить оптимальную угловую скорость при заданной нагрузочной характеристике, производители выпускают модельные ряды с различными индуктивностями (числом витков) обмоток. При этом, меньшее число витков соответствует более быстроходному двигателю.
См. также
Ссылки
Бесколлекторный электродвигатель — это… Что такое Бесколлекторный электродвигатель?
Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что коллектор такого двигателя обычно питается от постоянного напряжения.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор
Статор бесколлекторного электродвигателяСтатор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке 1 (желтая точечка). Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера, в связи с большим количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент, действующий на ротор, меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 %)
 | Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
- Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
Для применений, комбинирующих максимально достижимый КПД с предельно простыми и надёжными блоками управления (ключевой коммутатор, не использующий ШИМ), можно также выделить следующую особенность: Несмотря на то, что обороты могут широко варьироваться управляющим блоком, приемлемый КПД можно получить лишь в относительно узком интервале угловых скоростей. Это определяется индуктивностью обмоток. Если скорость будет ниже оптимальной, продолжающаяся подача тока в данную фазу, после достижения предела магнитного потока, будет приводить лишь к ненужному нагреву. На скоростях выше оптимальной, магнитный поток в полюсе не достигнет максимума из-за ограниченного индуктивностью времени нарастания тока. Примерами таких двигателей являются модельные бесколлекторные комплекты. Они должны быть эффективными, лёгкими и надёжными, а для того чтобы обеспечить оптимальную угловую скорость при заданной нагрузочной характеристике, производители выпускают модельные ряды с различными индуктивностями (числом витков) обмоток. При этом, меньшее число витков соответствует более быстроходному двигателю.
См. также
Ссылки
Как устроен бесщеточный двигатель
Работа бесщеточного электродвигателя основывается на электрических приводах, создающих магнитное вращающееся поле. В настоящее время существует несколько типов устройств, имеющих различные характеристики. С развитием технологий и использованием новых материалов, отличающихся высокой коэрцитивной силой и достаточным уровнем магнитного насыщения, стало возможным получение сильного магнитного поля и, как следствие, вентильных конструкций нового вида, в которых отсутствует обмотка на роторных элементах или стартере. Обширное распространение переключателей полупроводникового типа с высокой мощностью и приемлемой стоимостью ускорило создание подобных конструкций, облегчило исполнение и избавило от множества сложностей с коммутацией.

Принцип работы
Увеличение надежности, уменьшение цены и более простое изготовление обеспечивается отсутствием механических коммутационных элементов, обмотки ротора и постоянных магнитов. При этом повышение результативности возможно благодаря уменьшению потерь трения в коллекторной системе. Бесщеточный двигатель может функционировать на переменном либо непрерывном токе. Последний вариант отличается заметным сходством с коллекторными двигателями. Его характерной особенностью является формирование магнитного вращающегося поля и применение импульсного тока. В его основе присутствует электронный коммутатор, из-за чего повышается сложность конструкции.
Вычисление положения
Генерирование импульсов происходит в управляющей системе после сигнала, отражающего положение ротора. От стремительности вращения мотора напрямую зависит степень напряжения и подачи. Датчик в стартере определяет положение ротора и подает электрический сигнал. Вместе с магнитными полюсами, проходящими рядом с датчиком, меняется амплитуда сигнала. Также существуют бездатчиковые методики установления положения, к их числу относятся точки прохождения тока и преобразователи. ШИМ на входящих зажимах обеспечивают сохранение переменного уровня напряжения и управление мощностью.
Для ротора с неизменными магнитами подведение тока необязательно, благодаря чему отсутствуют потери в обмотке ротора. Бесщеточный двигатель для шуруповерта отличается низким уровнем инерции, обеспечиваемым отсутствием обмоток и механизированного коллектора. Таким образом появилась возможность использования на высоких скоростях без искрения и электромагнитного шума. Высокие значения тока и упрощение рассеивания тепла достигаются размещением нагревающих цепей на статоре. Стоит также отметить наличие электронного встроенного блока на некоторых моделях.

Магнитные элементы
Расположение магнитов может быть различным в соответствии с размерами двигателя, к примеру, на полюсах или по всему ротору. Создание качественных магнитов с большей мощностью возможно благодаря использованию неодима в сочетании с бором и железом. Несмотря на высокие показатели эксплуатации, бесщеточный двигатель для шуруповерта с постоянными магнитами обладает некоторыми недостатками, в их числе утрата магнитных характеристик при высоких температурах. Но они отличаются большей эффективностью и отсутствием потерь по сравнению с машинами, в конструкции которых имеются обмотки.
Импульсы инвертора определяют скорость вращения механизма. При неизменной питающей частоте работа двигателя осуществляется с постоянной скоростью в разомкнутой системе. Соответственно, скорость вращения меняется в зависимости от уровня питающей частоты.
Характеристики
Вентильный электродвигатель работает в установленных режимах и имеет функционал щеточного аналога, скорость которого зависит от приложенного напряжения. Механизм обладает множеством достоинств:
- отсутствие изменений при намагничивании и утечке тока;
- соответствие скорости вращения и самого вращающего момента;
- скорость не ограничивается центробежной силой, влияющей на коллектор и роторную электрообмотку;
- нет необходимости в коммутаторе и обмотке возбуждения;
- используемые магниты отличаются небольшим весом и компактными размерами;
- высокий момент силы;
- энергонасыщенность и эффективность.

Использование
Бесщеточный двигатель постоянного тока с постоянными магнитами встречается в основном в устройствах с мощностью в пределах 5 кВт. В более мощной аппаратуре их применение нерационально. Также стоит отметить, что магниты в двигателях данного типа отличаются особой чувствительностью к высоким температурам и сильным полям. Индукционные и щеточные варианты лишены таких недостатков. Двигатели активно используются в электрических мотоциклах, автомобильных приводах благодаря отсутствию трения в коллекторе. Среди особенностей нужно выделить равномерность вращающего момента и тока, что обеспечивает снижение акустического шума.
Бесколлекторный электродвигатель — это… Что такое Бесколлекторный электродвигатель?
Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что коллектор такого двигателя обычно питается от постоянного напряжения.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор
Статор бесколлекторного электродвигателяСтатор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке 1 (желтая точечка). Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера, в связи с большим количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент, действующий на ротор, меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 %)
 | Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
- Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
Для применений, комбинирующих максимально достижимый КПД с предельно простыми и надёжными блоками управления (ключевой коммутатор, не использующий ШИМ), можно также выделить следующую особенность: Несмотря на то, что обороты могут широко варьироваться управляющим блоком, приемлемый КПД можно получить лишь в относительно узком интервале угловых скоростей. Это определяется индуктивностью обмоток. Если скорость будет ниже оптимальной, продолжающаяся подача тока в данную фазу, после достижения предела магнитного потока, будет приводить лишь к ненужному нагреву. На скоростях выше оптимальной, магнитный поток в полюсе не достигнет максимума из-за ограниченного индуктивностью времени нарастания тока. Примерами таких двигателей являются модельные бесколлекторные комплекты. Они должны быть эффективными, лёгкими и надёжными, а для того чтобы обеспечить оптимальную угловую скорость при заданной нагрузочной характеристике, производители выпускают модельные ряды с различными индуктивностями (числом витков) обмоток. При этом, меньшее число витков соответствует более быстроходному двигателю.
См. также
Ссылки
Вентильный двигатель: принцип работы и схема
Для того чтобы решать задачи по контролю современных прецизионных систем, все чаще используется вентильный двигатель. Это характеризуется большим преимуществом таких приборов, а также активным формированием вычислительных возможностей микроэлектроники. Как известно, они могут обеспечить высокую плотность длительного момента и энергоэффективности по сравнению с другими видами двигателей.
Схема вентильного двигателя
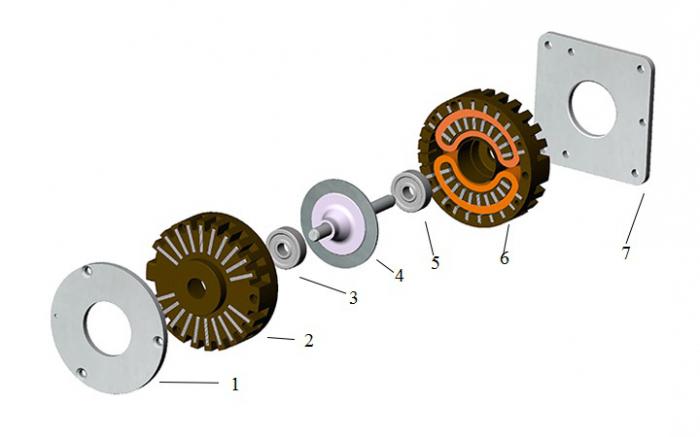
Двигатель состоит из следующих деталей:
1. Задняя часть корпуса.
2. Статор.
3. Подшипник.
4. Магнитный диск (ротор).
5. Подшипник.
6. Статор с обмоткой.
7. Передняя часть корпуса.
У вентильного двигателя имеется взаимосвязь между многофазной обмоткой статора и ротора. У них присутствуют постоянные магниты и встроенный датчик положения. Коммутация прибора реализовывается при помощи вентильного преобразователя, вследствие чего он и получил такое название.
Схема вентильного двигателя состоит из задней крышки и печатной платы датчиков, втулки подшипника, вала и самого подшипника, магнитов ротора, изолирующего кольца, обмотки, трельчатой пружины, промежуточной втулки, датчика Холла, изоляции, корпуса и проводов.
В случае соединения обмоток «звездой» устройство имеет большие постоянные моменты, поэтому такую сборку применяют для управления осями. В случае скрепления обмоток «треугольником» их можно использовать для работы с большими скоростями. Чаще всего количество пар полюсов вычисляется численностью магнитов ротора, которые помогают определить соотношение электрических и механических оборотов.
Статор может быть изготовлен с безжелезным или железным сердечником. Используя такие конструкции с первым вариантом, можно обеспечить отсутствие притяжения магнитов ротора, но и в это же мгновение снижается на 20% эффективность двигателя из-за уменьшения значения постоянного момента.

Со схемы видно, что в статоре ток образуется в обмотках, а в роторе создается при помощи высокоэнергетических постоянных магнитов.
Условные обозначения:
— VT1-VT7 — транзисторные коммуникаторы;
— A, B, C – фазы обмоток;
— M – момент двигателя;
— DR – датчик положения ротора;
— U – регулятор напряжения питания двигателя;
— S (south), N (north) – направление магнита;
— UZ – частотный преобразователь;
— BR – датчик частоты вращения;
— VD – стабилитрон;
— L – катушка индуктивности.
Схема двигателя показывает, что одним из основных преимуществ ротора, в котором установлены постоянные магниты, является уменьшение его диаметра и, как следствие, сокращение момента инерции. Такие приспособления могут быть встроенными в сам прибор или расположенными на его поверхности. Понижение этого показателя очень часто приводит к небольшим значениям баланса момента инерции самого двигателя и приведенного к его валу нагрузки, который и усложняет работу привода. По этой причине производители могут предложить стандартный и повышенный в 2-4 раза момент инерции.
Принципы работы
На сегодняшний день становится очень популярным вентильный двигатель, принцип работы которого основан на том, что контролер устройства начинает коммутировать обмотки статора. Благодаря этому вектор магнитного поля остается всегда сдвинутым на угол, приближающийся к 900 (-900) относительно ротора. Контролер рассчитан на управление током, который движется через обмотки двигателя, в том числе и величиной магнитного поля статора. Следовательно, можно регулировать момент, который воздействует на прибор. Показатель угла между векторами может определить направление вращения, которое действует на него.
Нужно учитывать, что речь идет об электрических градусах (они значительно меньше геометрических). Для примера приведем расчет вентильного двигателя с ротором, который в себе имеет 3 пары полюсов. Тогда оптимальным его углом будет 900 /3=300. Эти пары предусматривают 6 фаз обмоток коммутации, тогда получается, что вектор статора может перемещаться скачками по 600. Из этого видно, что настоящий угол между векторами обязательно будет варьироваться в пределах от 600 до 1200, начиная с вращения ротора.
Вентильный двигатель, принцип работы которого основывается на обороте фаз коммутации, из-за которых поток возбуждения поддерживается относительно постоянным движением якоря, после их взаимодействия начинает формировать вращающийся момент. Он устремляется повернуть ротор таким способом, чтобы все потоки возбуждения и якоря совпали воедино. Но во время его разворота датчик начинает переключать обмотки, и поток перемещается на следующий шаг. В этот момент результирующий вектор сдвинется, но останется полностью неподвижным сравнительно с потоком ротора, что в итоге и создаст вращающий момент вала.
Преимущества
Применяя вентильный двигатель в работе, можно отметить такие его достоинства:
— возможность применения широкого диапазона для модифицирования частоты вращения;
— высокая динамика и быстродействие;
— максимальная точность позиционирования;
— небольшие затраты на техническое обслуживание;
— устройство можно отнести к взрывозащищенным объектам;
— имеет способность переносить большие перегрузки в момент вращения;
— высокий КПД, который составляет более 90%;
— имеются скользящие электронные контакты, которые существенно увеличивают рабочий ресурс и срок службы;
— при длительной работе нет перегрева электродвигателя.
Недостатки
Несмотря на огромное количество достоинств, вентильный двигатель также имеет и недостатки в эксплуатации:
— довольно сложное управление электродвигателем;
— относительно высокая цена устройства из-за применения в его конструкции ротора, который имеет дорогостоящие постоянные магниты.
Вентильный индукторный двигатель

Вентильно-индукторный двигатель – это устройство, в котором предусмотрено переключающееся магнитное сопротивление. В нем преобразование энергии происходит за счет изменения индуктивности обмоток, которые располагаются на явно выраженных зубцах статора при передвижении зубчатого магнитного ротора. Питание устройство получает от электрического преобразователя, поочередно переключающего обмотки двигателя в строгости по перемещению ротора.
Вентильно-индукторный двигатель представляет собой комплексную сложную систему, в которой работают совместно разнообразные по своей физической природе компоненты. Для удачного проектирования таких устройств необходимы углубленные знания в области конструирования машин и механики, а также электроники, электромеханики и микропроцессорной техники.
Современное устройство выступает как электродвигатель, действующий совместно с электронным преобразователем, который изготавливается по интегральной технологии с использованием микропроцессора. Он позволяет осуществить качественное управление двигателем с наилучшими показателями переработки энергии.
Свойства двигателя

Такие устройства обладают высокой динамикой, большой перегрузочной способностью и точным позиционированием. Благодаря тому что в них отсутствуют движущие части, их использование возможно во взрывоопасной агрессивной среде. Такие моторы также называют и бесколлекторными, их основным преимуществом, по сравнению с коллекторными, является скорость, которая зависит от напряжения питания нагружающего момента. Также еще одним немаловажным свойством считается отсутствие истираемых и трущихся элементов, которые переключают контакты, благодаря чему вырастает ресурс пользования аппаратом.
Вентильные двигатели постоянного тока
Все двигатели постоянного тока можно назвать бесколлекторными. Они работают от сети с постоянным током. Щеточный узел предусмотрен для электрического объединения цепей ротора и статора. Такая деталь является самой уязвимой и достаточно сложной в обслуживании и ремонте.
Вентильный двигатель постоянного тока работает по тому же принципу, что и все синхронные устройства такого типа. Он представляет собой замкнутую систему, включающую силовой полупроводниковый преобразователь, датчик положения ротора и координатор.
Вентильные двигатели переменного тока
Такие устройства получают свое питание от сетей переменного тока. Скорость вращения ротора и движения первой гармоники магнитной силы статора полностью совпадают. Данный подтип двигателей можно использовать при высоких мощностях. К этой группе относятся шаговые и реактивные вентильные аппараты. Отличительной особенностью шаговых устройств является дискретное угловое смещение ротора при его работе. Питание обмоток формируется при помощи полупроводниковых компонентов. Управление вентильным двигателем осуществляется при последовательном смещении ротора, которое и создает переключение его питания с одних обмоток на другие. Это устройство можно разделить на одно-, трех- и многофазные, первые из которых могут содержать пусковую обмотку или фазосдвигающую цепь, а также запускаться вручную.
Принцип работы синхронного двигателя

Вентильный синхронный двигатель работает на основе взаимодействия магнитных полей ротора и статора. Схематически магнитное поле при вращении можно изобразить плюсами этих же магнитов, которые движутся со скоростью магнитного поля статора. Поле ротора также возможно изобразить как постоянный магнит, который делает обороты синхронно с полем статора. В случае отсутствия внешнего вращающего момента, который прикладывается к валу аппарата, оси полностью совпадают. Воздействующие силы притяжения проходят вдоль всей оси полюсов и могут компенсировать друг друга. Угол между ними приравнивается к нулю.
В случае если на вал машины будет воздействовать тормозной момент, то ротор перемещается в сторону с запаздыванием. Благодаря этому силы притяжения разбиваются на составляющие, которые направляются вдоль оси плюсовых показателей и перпендикулярно к оси полюсов. Если будет прикладываться внешний момент, который создает ускорение, то есть начинает действовать по направлению вращения вала, картинка по взаимодействию полей полностью изменится на обратную. Направленность углового смещения начинает трансформироваться на противоположное, и в связи с этим меняется направление тангенциальных сил и воздействие электромагнитного момента. При таком раскладе двигатель становится тормозным, а аппарат работает как генератор, который подводимую к валу механическую энергию преобразует в электрическую. Далее она перенаправляется в сеть, питающую статор.
Когда будет отсутствовать внешний, явнополюсный момент начнет принимать положение, при котором ось полюсов магнитного поля статора будет совпадать с продольной. Это размещение станет соответствовать минимальному сопротивлению потока в статоре.
В случае воздействия на вал машины тормозного момента ротор отклонится, при этом магнитное поле статора будет деформированным, так как поток стремится замкнуться по наименьшему сопротивлению. Для его определения необходимы силовые линии, направленность которых в каждой из точек будет соответствовать движению действия силы, поэтому изменение поля приведет к появлению тангенциального взаимодействия.
Рассмотрев все эти процессы в синхронных двигателях, можно выявить демонстративный принцип обратимости разнообразных машин, то есть возможность любого электрического аппарата изменить направленность преобразованной энергии на противоположную.
Бесколлекторные двигатели с постоянными магнитами

Вентильный двигатель с постоянными магнитами используется для решения серьезных оборонных и промышленных задач, так как такое устройство имеет большой запас мощности и эффективности.
Эти приборы чаще всего применяются в отраслях, где необходимы сравнительно низкие потребляющие мощности и небольшие габариты. Они могут иметь самые разные габариты, без технологических ограничений. В то же время большие аппараты не являются совершенно новыми, их чаще всего производят компании, которые стремятся преодолеть экономические трудности, ограничивающие ассортимент этих приборов. У них есть свои преимущества, среди которых можно отметить высокую эффективность из-за потерь в роторе и большую плотность мощности. Для управления бесколлекторными двигателями нужен частотно-регулируемый привод.
Анализ по затратам и результатам показывает, что устройства с постоянными магнитами намного предпочтительнее, по сравнению с другими, альтернативными технологиями. Чаще всего они используются для отраслей промышленности с достаточно тяжелым распорядком работы судовых двигателей, в военной и оборонной отрасли и других подразделениях, число которых непрерывно возрастает.
Реактивный двигатель
Вентильно-реактивный двигатель работает с использованием двухфазных обмоток, которые установлены вокруг диаметрально противоположных полюсов статора. Подача питания продвигается к ротору в соответствии с полюсами. Таким образом, его противодействие полностью сводится к минимуму.
Вентильный двигатель, своими руками созданный, обеспечивает высокоэффективную скорость привода при оптимизированном магнетизме для работы с реверсом. Информация о месторасположении ротора используется для того, чтобы управлять фазами подачи напряжения, так как это является оптимальным для достижения непрерывного и плавного крутящего момента и высокой эффективности.
Сигналы, которые выдает реактивный двигатель, накладываются на угловую ненасыщенную фазу индуктивности. Минимальное сопротивление полюса полностью соответствует максимальной индуктивности устройства.
Положительный момент можно получить только при углах, когда показатели позитивные. На небольших скоростях фазный ток обязательно должен быть ограниченным, чтобы произвести защиту электроники от высоких вольт-секунд.
Механизм преобразования можно иллюстрировать линией реактивной энергии. Мощностная сфера характеризует собой питание, которое преобразовывается в механическую энергию. В случае его резкого отключения избыточная или остаточная сила возвращается к статору. Минимальные показатели влияния магнитного поля на производительность устройства являются основным его отличием от похожих устройств.