


Моторы с внешним ротором не требуют редкоземельных магнитов
Рис.1
Электродвигатели с постоянным возбуждением основаны на постоянных магнитах в связи с их функцией. Особенно сильные магниты могут быть произведены в процессе спекания из соединений с редкоземельными материалами, такими, как кобальт и самарий или неодим, железо и бор. После искусственного дефицита этих материалов и, в результате, резкого роста затрат, цены сейчас снова падают. Однако, так как в настоящее время по-прежнему Китай контролирует большую часть поставляемого количества, необходимо продолжать считаться с резкими колебаниями цены. Кроме того, их наличие не гарантируется.
При этом, в будущем, затраты на редкоземельные магниты будут пустяковыми, но трудными для расчета производителями электродвигателей. Поэтому электродвигатели с постоянным возбуждением, которые являются особенно энергосберегающими, часто рассматриваются как дорогие в пользовательских кругах. Это не обязательно так, однако, каждый электрический привод с высокой эффективностью действительно зависит от мощных редкоземельных магнитов. ЕС-моторы с внешним ротором, например, которые используются в энергосберегающих вентиляторах, обходятся «простыми», экономически эффективными и, прежде всего, легко доступными ферритовыми магнитами, и они делают это с эффективностью более 90% в некоторых случаях.
Что такое ЕС мотор?
Поскольку термины в приводной технике не обязательно всегда используются с ясными и недвусмысленными определениям, имеет смысл во-первых выяснить, какие двигатели на самом деле имеются в виду в связи с обсуждением редких земель. Будь это бесщёточный привод постоянного тока (BLDC двигатель), BLPM двигатель или EC двигатель, это всегда означает, что это синхронный двигатель с постоянным возбуждением, который работает с силовой электроникой — питаемой от бытовой электросети или с источником питания постоянного тока. Так называемые BLDC/BLPM двигатели обычно работают с прямоугольными токами (блочная коммутация). ЕС-моторы могут работать с прямоугольными токами, а также с синусоидальными токами (синусоидальная коммутация). В последнем случае достигается значительное снижение уровня шума по сравнению с блочной коммутацией. Конструкция с синусоидальными токами соответствует классическому синхронному двигателю. Основные функции ЕС мотора легко понятны (рис. 1):
Ротор с постоянными магнитами вращается синхронно с вращающимся полем статора. В отличие от питающегося от сети асинхронного двигателя, частота вращения ротора не связана автоматически с частотой напряжения питания, но предопределена тем, что называется электронной коммутацией. Поэтому работа EC двигателя всегда требует дополнительной электроники. Именно она определяет угловую скорость вращающегося магнитного поля, в котором синхронно с ним вращается ротор. Корреляция между напряжением и скоростью, а также между током и моментом в основном линейная. Следовательно, в отношении его характеристики крутящий момент/скорость, двигатель работает как двигатель с параллельным возбуждением (DC shunt motor). Для определения положения ротора, либо в мотор встраиваются датчики положения ротора, либо электронный коммутатор измеряет положение ротора без датчиков через его параметры — напряжение на роторе или ток двигателя. Холостой ход зависит от приложенного напряжения и числа витков обмотки статора.
Рис.2
Таким образом, в пределах, которые определяются физическими параметрами (например, выходная мощность, крутящий момент, температура и т.д.), может быть реализована без проскальзывания почти произвольная рабочая скорость (синхронная с вращающимся магнитным полем статора), которая даже может быть выше частоты сети, в отличие от асинхронного двигателя.
Например, если работает вентилятор с EC двигателем, скорость может быть всегда адаптирована в соответствии с требованиями системы вентиляции или процесса. Следовательно, при частичной нагрузке потребление энергии может быть значительно уменьшено, потому что требуемая мощность вентилятора изменяется как третья степень от скорости. Помимо этого, ЕС двигатели имеют существенно более высокую эффективность (рис. 2), чем двигатели переменного тока, как при частичной, так и при полной нагрузках, и они обычно имеют меньшие размеры. Причиной этого является то, что EC двигатели не требуют тока намагничивания, текущие потери тепла ротора исчезают, и возможно реализовать специальную компоновку обмотки (single-tooth winding / toothcoil winding). Даже если обсуждение редкоземельных магнитов не в пользу этих двигателей, они просто лучший выбор с точки зрения энергоэффективности.
С ЕС-моторами вас не вынуждают полагаться на мощные редкоземельные магниты, потому что их превосходные магнитные качества действительно необходимы только для очень динамичных сервоприводов, таких, как те, которые используются в робототехнике. С одной стороны, здесь необходимы компактные размеры, с другой стороны, однако, чтобы минимизировать момент инерции, требуется минимально возможная масса ротора. Эти требования могут быть достигнуты только с высокой остаточной намагниченностью и высокой коэрцитивностью редкоземельных магнитов. Поэтому сегодня производители таких сервоприводов в первую очередь сосредоточили внимание на сокращении необходимой массы и высоты магнита с помощью сложных оптимизаций, и они уже достигли здесь очень значительной экономии.
Специалисты по двигателям и вентиляторам компании ebm-papst Mulfingen со своими вентиляторами, которые оснащены энергосберегающими GreenTech EC двигателями, даже не сталкивались с этой проблемой. Несмотря на свою высокую эффективность, эти приводы сделаны без редкоземельных магнитов. Ключевым для этого является принцип двигателя с внешним ротором:
Ротор находится на внешней стороне
Рис.3
Здесь часть двигателя находится в покое, статор расположен внутри и окружен частью, которая движется, ротором (рис.3). Расположенный снаружи ротор вращается вокруг внутреннего статора. При таком расположении, мотор с внешним ротором может достичь более высокого крутящего момента, чем с внутренним ротором при той же длине модуля, той же самой магнитной системе и той же толщине магнита. При удачном использовании степеней свободы в области вентилятора, двигатель с внешним ротором с использованием магнитотвердых ферритовых магнитов может достичь крутящего момента и эффективности, которых двигатель с внутренним ротором может добиться только с редкоземельными магнитами с ограниченными степенями свободы (объём, масса). В отличие от сервоприводов, вентиляторы не требуют высокой динамики. Совсем наоборот; определенный момент инерции очень желателен для вентиляторов, чтобы иметь плавный запуск и определённую динамику. Поэтому можно без дальнейшей суеты отказаться от редкоземельных магнитов и использовать ферритовые магниты, которые не только значительно более рентабельным, но и имеют стабильные цены на рынке из-за их доступности.
Рис.4
Конструкция двигателя с внешним ротором является выгодной для вентиляторов также и в другом отношении, а именно, осевые или центробежные колёса могут быть установлены на вращающихся роторах, непосредственно на «корпусе» двигателя (рис. 4). Компактные размеры, особенно в осевом направлении, являются следствием этого и охлаждение становится проще, когда двигатель может использовать воздух, вытесняемый вентилятором, для собственного охлаждения. Конструкция с синусоидальной коммутацией также обеспечивает особенно низкий уровень шума. Следовательно, энергоэффективные GreenTech ЕС-вентиляторы совершенно не зависят от рыночной тенденции редкоземельных магнитов.
Источник: http://www.ebmpapst.com.cn
14 Специальные ИДПТ
14 Специальные ИДПТ, ИСД
Асинхронные двигатели с внешним ротором
Статор этих двигателей находится внутри ротора (рис. 2.6). Такие конструкции называют обращенными.

Асинхронный двигатель с внешним ротором (рис. 2.6) состоит из шихтованного сердечника статора 10, собранного на втулке 9, которая напрессована на стальную невращающуюся ось 7. Трехфазная обмотка статора 6 имеет три вывода 1, которые проходят через полую часть 2 оси 7. Внешний ротор состоит из шихтованного сердечника 4, в пазах которого расположены стержни обмотки, замкнутые с двух сторон замыкающими кольцами. Наружная поверхность ротора образована ободом 11, форма которого зависит от назначения двигателя, то есть он может быть колесом, шкивом, роликом или просто массивным элементом — маховиком. С двух сторон обод закреплен крышками 3 посредством винтов 5. Крышки 3 сочленяются с подшипниками 8.
Однако самое широкое применение эти двигатели получили в гироскопических приборах в качестве гиродвигателей. Гироскопические приборы составляют основу навигационной техники в судостроении, авиации и ракетостроении. Основной элемент гироскопического прибора — гироскоп, то есть массивный цилиндрический ротор. Приведенный в быстрое вращение, этот ротор сохраняет неизменным положение в пространстве своей оси вращения. Чем больше частота вращения ротора, тем эффективнее проявляется это свойство.
Линейные асинхронные двигатели
Во многих производственных механизмах, транспортных средствах и приборных устройствах рабочий орган совершает поступательное или возвратно-поступательное движение. Для привода этих устройств и механизмов используют двигатели с вращательным движением ротора и промежуточным кинематическим звеном для преобразования вращательного движения в линейное. Такое звено усложняет привод, вызывает дополнительные потери мощности, снижает КПД и надежность.
Кинематика привода указанных устройств упрощается, если использовать линейный электродвигатель, у которого подвижная часть совершает поступательное или возвратно-поступательное движение. Наибольшее применение получили линейные асинхронные двигатели (ЛАД). Принцип действия ЛАД основан на способности многофазной (трехфазной) системы токов создавать бегущее магнитное поле. Если в обычном асинхронном двигателе статор цилиндрической формы разрезать вдоль его оси и развернуть в плоскость (рис. 2.7), то получим статор линейного двигателя, называемый индуктором 1.
Если обмотку индуктора соединить звездой или треугольником и включить в трехфазную сеть, то возникает магнитное поле, ось которого будет перемещаться вдоль развернутой поверхности сердечника индуктора с синхронной скоростью ν1. Такое магнитное поле называют бегущим.
Синхронная скорость бегущего поля пропорциональна частоте тока f1 и длине индуктора L1: и обратно пропорциональна числу пар полюсов в обмотке индуктора р.
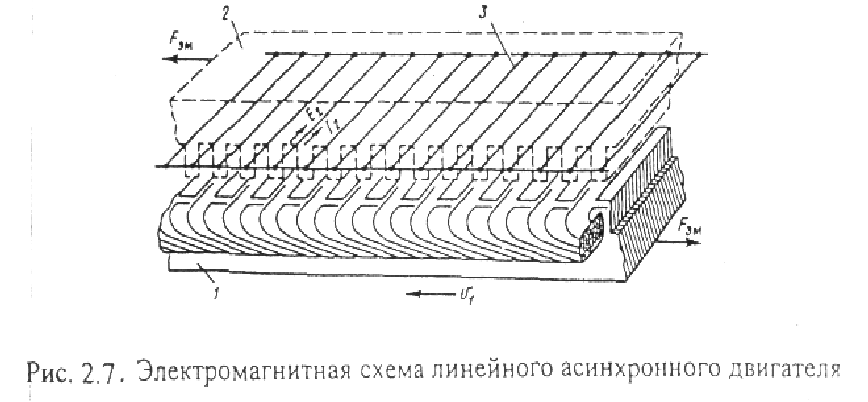
Вблизи индуктора, параллельно ему, расположен вторичный элемент, состоящий из магнитопровода 2 (на рис. 2.7 показан пунктирными линиями), в пазы которого заложены алюминиевые или медные стержни 3 короткозамкнутой обмотки. Бегущее поле индуктора, сцепляясь со стержнями 3 короткозамкнутой обмотки, будет наводить в них ЭДС Е2, которая создаст токи Iа. Взаимодействуя с бегущим магнитным полем, эти токи создают электромагнитные силы Рэм, стремящиеся сместить магнитопроводы индуктора и вторичного элемента относительно друг друга в противоположных направлениях. Если один из магнитопроводов, например индуктора, закрепить неподвижно, то другой магнитопровод, называемый в этом случае бегунком, будет линейно перемещаться относительно первого в направлении движения бегущего поля. В итоге электроэнергия, поступающая в обмотку индуктора из сети, будет преобразовываться в механическую энергию линейного (поступательного) движения.
Если неподвижным сделать вторичный элемент, то бегунком станет индуктор, который будет перемещаться линейно в направлении, противоположном движению создаваемого им бегущего поля.
Гистерезисные двигатели
Работа гистерезисного двигателя основана на действии гистерезисного момента. На рис. 2.8 показаны два постоянных магнита, создающих поле статора.

Между ними расположен цилиндр (ротор) из магнитно-твердого материала. Под действием внешнего магнитного поля ротор намагничивается. На стороне ротора, обращенной к северному полюсу постоянного магнита, возбуждается южный полюс, а на стороне ротора, обращенной к южному полюсу постоянного магнита, — северный полюс.
На ротор начинают действовать силы, направленные радиально к его поверхности. Если полюса постоянного магнита вращать вокруг ротора, то вследствие явления магнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля и между осью поля ротора и осью внешнего поля появится угол γ.
Явление магнитного запаздывания заключается в том, что частицы ферромагнитного материала (помещенного во внешнее магнитное поле), представляющие собой элементарные магниты, стремятся ориентироваться в соответствии с направлением внешнего поля. Если внешнее поле изменит свое направление, то элементарные частицы меняют свою ориентацию. Однако повороту элементарных частиц препятствуют в магнитно-твердых материалах внутренние силы молекулярного трения. Для изменения направления этих частиц необходима определенная МДС, вследствие чего перемагничивание ротора несколько отстает от изменения направления внешнего поля. Это отставание (магнитное запаздывание) характеризуется углом гистерезисного сдвига γ между вектором магнитного потока ротора Ф и вектором магнитного потока обмотки статора Ф (рис. 2.8). Этот угол зависит исключительно от магнитных свойств материала ротора.
Синхронные реактивные двигатели
Отличительная особенность синхронных реактивных двигателей (СРД) — отсутствие у них возбуждения со стороны ротора. Основной магнитный поток в этом двигателе создается исключительно за счет МДС обмотки статора. В двух- и в трехфазных СРД эта МДС является вращающейся.
Принцип действия СРД заключается в следующем. При включении обмотки статора в сеть возникает вращающееся магнитное поле. Как только ось этого поля d’—d’ займет положение в пространстве расточки статора, при котором она будет смещена относительно продольной оси невозбужденных полюсов ротора d—d на угол Θ в сторону вращения, между полюсами этого поля и выступающими полюсами невозбужденного ротора возникнет реактивная сила магнитного притяжения полюса ротора к полюсу вращающегося поля статора Fγ. Вектор этой силы Fр смещен относительно продольной оси ротора также на угол Θ, поэтому сила Fр имеет две составляющие: нормальную Fпр, направленную перпендикулярно продольной оси, и тангенциальную Ftp, полюсов ротора (рис. 2.9).
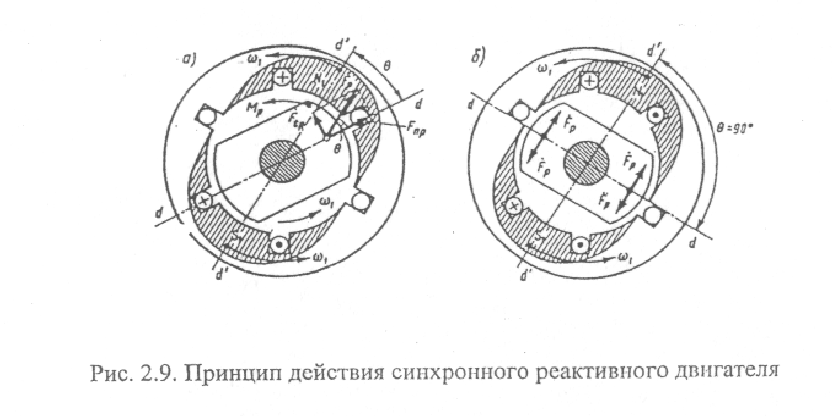
Совокупность тангенциальных составляющих реактивных сил Ftp на всех полюсах невозбужденного ротора создаст вращающий реактивный момент Мр, который будет вращать ротор с синхронной частотой ω1. С ростом механической нагрузки на вал СРД угол Θ увеличивается и момент Мр растет.
Однако при значении угла Θ = 90° реактивный момент Мр = 0. Такая зависимость момента Мр от угла Θ является принципиальной для реактивного момента, отличающей его от основной составляющей электромагнитного момента Мосн синхронного двигателя с возбужденным ротором, который при Θ = 90° имеет максимальное значение. Из рис. 2.9, б видно, что при Θ = 90° реактивные силы магнитного притяжения Рмр действующие на каждый полюс невозбужденного ротора, взаимно уравновешиваются и реактивный момент Мр = 0. Максимальное значение реактивного момента Мшах наступает при значении угля Θ = 45°
Мощность СРД и развиваемый им момент меньше, чем у синхронного двигателя с возбужденными полюсами ротора. Объясняется это тем, что у СРД из-за отсутствия магнитного потока ротора ЭДС Е0 = Θ, поэтому основная составляющая электромагнитного момента Мосн = 0 и электромагнитный момент СРД определяется лишь реактивной составляющей (М=МР). Следовательно, при одинаковых габаритах синхронного двигателя с возбужденными полюсами ротора и СРД мощность на валу и развиваемый момент у СРД намного меньше.
3
Сравнение вентиляторов: внутренний и внешний ротор
В отличие от старых вентиляторов, построенных по классической схеме с внешним электродвигателем и обладающих большими габаритами, современные вентиляторы весьма компактны. Этого удалось добиться за счет применения встроенного двигателя, реализация которого стала возможной только после внедрения схемы электродвигателя с внешним ротором.
Вентиляторы с внутренним ротором
Традиционно во всех машинах и электродвигателях ротор расположен внутри статора. Неподвижный статор закреплен в корпусе агрегата и охватывает вращающиеся ротор и его обмотку. Далее вращательное движение передается потребляющей машине, например, компрессору или вентилятору.
Схема установки при использовании двигателя с внешним ротором показана на рис. 1.
Рис. 1. Схема установки при использовании двигателя с внутренним ротором.
Вентиляторы с внешним ротором
Очевидно, что, если потребитель требует вал большого диаметра, то вышеприведенная схема не выгодна. Как раз такими машинами являются центробежные вентиляторы. Внутренний диаметр колеса у них велик и потребовал бы или ротора большого диаметра или дополнительный механизм, передающий вращательное движение с ротора на колесо и одновременно усложняющий конструкцию.
Другой выход из ситуации – использование электродвигателей с внешним ротором. В таких двигателях неподвижный статор расположен в центре, а вращающийся ротор будет охватывать статор. При соответствующем подбор диаметров статора, ротора, а также внутреннего и наружного диаметров колеса вентилятора становится возможным получить конструкцию, когда лопатки насаживаются непосредственно на ротор. При этом не требуется никаких дополнительных передающих механизмов и экономится длина ротора. Таким образом, конструкция получается простой и компактной (см. рис. 2).
Рис. 2. Схема установки при использовании двигателя с внешним ротором.
Рис. 3. Вентилятор с внешним ротором
Автор: Хомутский Юрий
Источник: alldc.ru
29(36,37,38,40)
29 Специальные ИДПТ, ИСД
36 Асинхронные двигатели с внешним ротором
Статор этих двигателей находится внутри ротора (рис. 2.6). Такие конструкции называют обращенными.

Асинхронный двигатель с внешним ротором (рис. 2.6) состоит из шихтованного сердечника статора 10, собранного на втулке 9, которая напрессована на стальную невращающуюся ось 7. Трехфазная обмотка статора 6 имеет три вывода 1, которые проходят через полую часть 2 оси 7. Внешний ротор состоит из шихтованного сердечника 4, в пазах которого расположены стержни обмотки, замкнутые с двух сторон замыкающими кольцами. Наружная поверхность ротора образована ободом 11, форма которого зависит от назначения двигателя, то есть он может быть колесом, шкивом, роликом или просто массивным элементом — маховиком. С двух сторон обод закреплен крышками 3 посредством винтов 5. Крышки 3 сочленяются с подшипниками 8.
Асинхронные двигатели с внешним ротором применяют в электроинструменте, в рольганге на металлургических предприятиях (внешний ротор двигателя — это вращающийся ролик рольганга), в качестве двигателя-маховика для привода устройств, требующих равномерного вращения при неравномерной нагрузке на вал.
Однако самое широкое применение эти двигатели получили в гироскопических приборах в качестве гиродвигателей. Гироскопические приборы составляют основу навигационной техники в судостроении, авиации и ракетостроении. Основной элемент гироскопического прибора — гироскоп, то есть массивный цилиндрический ротор. Приведенный в быстрое вращение, этот ротор сохраняет неизменным положение в пространстве своей оси вращения. Чем больше частота вращения ротора, тем эффективнее проявляется это свойство.
37 Линейные асинхронные двигатели
Во многих производственных механизмах, транспортных средствах и приборных устройствах рабочий орган совершает поступательное или возвратно-поступательное движение. Для привода этих устройств и механизмов используют двигатели с вращательным движением ротора и промежуточным кинематическим звеном для преобразования вращательного движения в линейное. Такое звено усложняет привод, вызывает дополнительные потери мощности, снижает КПД и надежность.
Кинематика привода указанных устройств упрощается, если использовать линейный электродвигатель, у которого подвижная часть совершает поступательное или возвратно-поступательное движение. Наибольшее применение получили линейные асинхронные двигатели (ЛАД). Принцип действия ЛАД основан на способности многофазной (трехфазной) системы токов создавать бегущее магнитное поле. Если в обычном асинхронном двигателе статор цилиндрической формы разрезать вдоль его оси и развернуть в плоскость (рис. 2.7), то получим статор линейного двигателя, называемый индуктором 1.
Если обмотку индуктора соединить звездой или треугольником и включить в трехфазную сеть, то возникает магнитное поле, ось которого будет перемещаться вдоль развернутой поверхности сердечника индуктора с синхронной скоростью ν1. Такое магнитное поле называют бегущим.
Синхронная скорость бегущего поля пропорциональна частоте тока f1 и длине индуктора L1: и обратно пропорциональна числу пар полюсов в обмотке индуктора р.

Вблизи индуктора, параллельно ему, расположен вторичный элемент, состоящий из магнитопровода 2 (на рис. 2.7 показан пунктирными линиями), в пазы которого заложены алюминиевые или медные стержни 3 короткозамкнутой обмотки. Бегущее поле индуктора, сцепляясь со стержнями 3 короткозамкнутой обмотки, будет наводить в них ЭДС Е2, которая создаст токи Iа. Взаимодействуя с бегущим магнитным полем, эти токи создают электромагнитные силы Рэм, стремящиеся сместить магнитопроводы индуктора и вторичного элемента относительно друг друга в противоположных направлениях. Если один из магнитопроводов, например индуктора, закрепить неподвижно, то другой магнитопровод, называемый в этом случае бегунком, будет линейно перемещаться относительно первого в направлении движения бегущего поля. В итоге электроэнергия, поступающая в обмотку индуктора из сети, будет преобразовываться в механическую энергию линейного (поступательного) движения.
Если неподвижным сделать вторичный элемент, то бегунком станет индуктор, который будет перемещаться линейно в направлении, противоположном движению создаваемого им бегущего поля.
40 Гистерезисные двигатели
Работа гистерезисного двигателя основана на действии гистерезисного момента. На рис. 2.8 показаны два постоянных магнита, создающих поле статора.

Между ними расположен цилиндр (ротор) из магнитно-твердого материала. Под действием внешнего магнитного поля ротор намагничивается. На стороне ротора, обращенной к северному полюсу постоянного магнита, возбуждается южный полюс, а на стороне ротора, обращенной к южному полюсу постоянного магнита, — северный полюс.
На ротор начинают действовать силы, направленные радиально к его поверхности. Если полюса постоянного магнита вращать вокруг ротора, то вследствие явления магнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля и между осью поля ротора и осью внешнего поля появится угол γ.
Явление магнитного запаздывания заключается в том, что частицы ферромагнитного материала (помещенного во внешнее магнитное поле), представляющие собой элементарные магниты, стремятся ориентироваться в соответствии с направлением внешнего поля. Если внешнее поле изменит свое направление, то элементарные частицы меняют свою ориентацию. Однако повороту элементарных частиц препятствуют в магнитно-твердых материалах внутренние силы молекулярного трения. Для изменения направления этих частиц необходима определенная МДС, вследствие чего перемагничивание ротора несколько отстает от изменения направления внешнего поля. Это отставание (магнитное запаздывание) характеризуется углом гистерезисного сдвига γ между вектором магнитного потока ротора Ф и вектором магнитного потока обмотки статора Ф (рис. 2.8). Этот угол зависит исключительно от магнитных свойств материала ротора.
38 Синхронные реактивные двигатели
Отличительная особенность синхронных реактивных двигателей (СРД) — отсутствие у них возбуждения со стороны ротора. Основной магнитный поток в этом двигателе создается исключительно за счет МДС обмотки статора. В двух- и в трехфазных СРД эта МДС является вращающейся.
П ринцип
действия СРД заключается в следующем.
При включении обмотки
статора в сеть возникает вращающееся
магнитное поле. Как только
ось этого поля d’—d’ займет положение в пространстве расточки
статора,
при котором она будет смещена относительно
продольной оси невозбужденных
полюсов ротора d—d
на угол Θ в сторону вращения, между
полюсами этого поля и выступающими
полюсами невозбужденного ротора
возникнет реактивная сила магнитного
притяжения полюса ротора к
полюсу вращающегося поля статора Fγ.
Вектор этой силы Fр смещен относительно
продольной оси ротора также на угол Θ,
поэтому сила Fр имеет
две составляющие: нормальную Fпр,
направленную перпендикулярно
продольной оси, и тангенциальную Ftp,
полюсов
ротора (рис. 2.9).
ринцип
действия СРД заключается в следующем.
При включении обмотки
статора в сеть возникает вращающееся
магнитное поле. Как только
ось этого поля d’—d’ займет положение в пространстве расточки
статора,
при котором она будет смещена относительно
продольной оси невозбужденных
полюсов ротора d—d
на угол Θ в сторону вращения, между
полюсами этого поля и выступающими
полюсами невозбужденного ротора
возникнет реактивная сила магнитного
притяжения полюса ротора к
полюсу вращающегося поля статора Fγ.
Вектор этой силы Fр смещен относительно
продольной оси ротора также на угол Θ,
поэтому сила Fр имеет
две составляющие: нормальную Fпр,
направленную перпендикулярно
продольной оси, и тангенциальную Ftp,
полюсов
ротора (рис. 2.9).
Совокупность тангенциальных составляющих реактивных сил Ftp на всех полюсах невозбужденного ротора создаст вращающий реактивный момент Мр, который будет вращать ротор с синхронной частотой ω1. С ростом механической нагрузки на вал СРД угол Θ увеличивается и момент Мр растет.
Однако при значении угла Θ = 90° реактивный момент Мр = 0. Такая зависимость момента Мр от угла Θ является принципиальной для реактивного момента, отличающей его от основной составляющей электромагнитного момента Мосн синхронного двигателя с возбужденным ротором, который при Θ = 90° имеет максимальное значение. Из рис. 2.9, б видно, что при Θ = 90° реактивные силы магнитного притяжения Рмр действующие на каждый полюс невозбужденного ротора, взаимно уравновешиваются и реактивный момент Мр = 0. Максимальное значение реактивного момента Мшах наступает при значении угля Θ = 45°
Мощность СРД и развиваемый им момент меньше, чем у синхронного двигателя с возбужденными полюсами ротора. Объясняется это тем, что у СРД из-за отсутствия магнитного потока ротора ЭДС Е0 = Θ, поэтому основная составляющая электромагнитного момента Мосн = 0 и электромагнитный момент СРД определяется лишь реактивной составляющей (М=МР). Следовательно, при одинаковых габаритах синхронного двигателя с возбужденными полюсами ротора и СРД мощность на валу и развиваемый момент у СРД намного меньше.
2
Двигатели с полым немагнитным ротором являются в настоящее время весьма распространенными исполнительными двигателями переменного тока. Они применяются в различных схемах автоматических устройств. Мощность двигателей с полым немагнитным ротором от десятых долей ватта до нескольких сотен ватт. Двигатели рассчитываются как для промышленной частоты (50 Гц), так и для повышенных частот (200, 400, 500 Гц). Частота вращения двигателей (синхронная) колеблется от 1500 до 30 000 об/мин. Конструктивное устройство одного из двигателей с полым немагнитным ротором представлено на рис. 18.5. Внешний статор 4 такого двигателя ничем не отличается от статора обычного асинхронного двигателя. Он набирается из изолированных друг от друга листов электротехнической стали. В пазах статора располагаются обмотки 6 управления и возбуждения, сдвинутые в пространстве на 90°. Эти обмотки либо изолированы друг от друга, либо соединены по мостиковой схеме. Мостиковая схема представляет собой замкнутую обмотку с отпайками через 90°. Она помогает достаточно просто осуществить точный пространственный сдвиг обмоток, способствует лучшему распределению токов и потерь в них. К недостаткам схемы следует отнести, во-первых, электрическую связь цепей возбуждения и управления, во-вторых, большое число параллельных ветвей (2а) и отпаек-концов при большом числе пар полюсов (2а = 2р) и, в-третьих, постоянство коэффициента трансформации k = wp/wr Внутренний статор 5 набирается из листов электротехнической стали на цилиндрическом выступе одного из подшипниковых щитов. Он служит для уменьшения магнитного сопротивления на пути основного (рабочего) магнитного потока, проходящего через воздушный зазор. Полый ротор двигателя 2изготовляется в виде тонкостенного станка из немагнитного материала, чаще из сплавов алюминия. Своим дном ротор жестко укрепляется на оси 7, которая свободно вращается в подшипниках, расположенных в подшипниковых щитах 3. Толщина стенок ротора зависит от мощности двигателя и колеблется в пределах от 0,1 до 1 мм. Вследствие весьма малой массы ротор обладает незначительным моментом инерции, что является очень ценным свойством двигателя с полым немагнитным ротором, способствующим его широкому распространению. Между стенками ротора и статорами имеются воздушные зазоры, которые обычно составляют 0,15…0,25 мм.
Двигатели мощностью менее 3 Вт изготовляются несколько иначе. Их обмотки возбуждения и управления размещаются в пазах внутреннего статора, и тогда внешний статор не имеет пазов и служит лишь для уменьшения магнитного сопротивления. При такой конструкции весьма облегчается процесс укладки обмоток в пазы при малых диаметрах расточки статора и несколько повышается вращающий момент, но диаметр ротора для увеличения обмоточного пространства на внутреннем статоре приходится несколько увеличить, что обусловливает некоторое увеличение момента инерции ротора. Для устранения этого недостатка иногда используется третья конструктивная форма двигателя: одна из обмоток размещается на внутреннем, а другая — на наружном статоре. Характерной особенностью двигателей с полым немагнитным ротором является большой магнитный промежуток δ на пути потока между наружным и внутренним статорами, который состоит из двух зазоров: δ1 — между внешним статором и ротором и δ2 — между внутренним статором. Кроме того, ротор, будучи немагнитным, тоже является воздушным зазором Δ. Таким образом, общий размер немагнитного воздушного промежутка между внешним и внутренним статорами δ = δ1 + δ2 + Δ составляет 0,4… 1,5 мм. Из-за большого немагнитного промежутка двигатели с полым немагнитным ротором имеют большой намагничивающий ток (0,8… 0,9)Iн и низкий коэффициент мощности cosφ. Большая сила намагничивающего тока приводит к большим электрическим потерям в обмотках двигателя и значительно снижает его КПД. С целью уменьшения электрических потерь двигатели с полым немагнитным ротором обычно конструируют так, чтобы до 70 % площади поперечного сечения статора у них занимали пазы с обмотками. В отличие от всех остальных типов роторов, применяемых для асинхронных исполнительных двигателей переменного тока, полый немагнитный ротор при большом активном сопротивлении rр обладает весьма незначительным индуктивным сопротивлением хр = (0,05…0,1)rр. Это его свойство способствует значительному повышению линейности механических и регулировочных характеристик двигателей. Принцип действия двигателя с полым немагнитным ротором состоит в следующем: переменный ток, протекая по обмоткам статора, создает вращающее магнитное поле, которое, пересекая полый ротор, наводит в нем вихревые токи; в результате взаимодействия этих токов с вращающимся магнитным полем двигателя возникает момент, который, действуя на ротор, увлекает его в сторону этого поля. К положительным свойствам двигателей с полым немагнитным ротором следует отнести:
К недостаткам двигателей с полым немагнитным ротором относятся: низкий КПД; у большинства двигателей даже в номинальном режиме ηн = 0,2…0,4 и значительно уменьшается при регулировании. Низкий КПД объясняется большими электрическими потерями в обмотке статора вследствие большого намагничивающего тока и полом роторе вследствие его большого активного сопротивления; низкий коэффициент мощности (cosφ = 0,2…0,4) вследствие большого немагнитного промежутка между наружным и внутренним статорами; большие габариты и масса, обусловленные первыми двумя недостатками. По габаритам и массе двигатель с полым немагнитным ротором больше силовых асинхронных двигателей и исполнительных двигателей постоянного тока той же номинальной мощности в 2- 4 раза. Желание уменьшить габариты и массу приводит к тому, что подавляющее большинство двигателей с полым немагнитным ротором рассчитывается на работу от сетей с повышенной частотой (200… 1000 Гц). Двигатели с повышенной частотой напряжения питания имеют более высокую частоту вращения n = 60f(1 — s)/p, a следовательно, развивают те же механические мощности при меньших моментах на валу, значениями которых определяются габариты машин. Дальше уже дополнительно наверное!!!!!
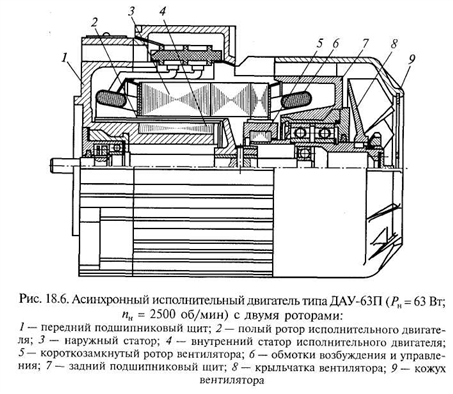
В некоторых схемах исполнительные двигатели должны длительное время развивать вращающий момент при неподвижном роторе, т.е. работать на упор (в режиме короткого замыкания). С целью необходимого при таком режиме отвода выделяемой в двигателях теплоты иногда выполняются двигатели с двумя развязанными в механическом отношении роторами, находящимися в расточке одного и того же статора. Один из них — ротор исполнительного двигателя, а другой — вентиляторного. Двигатель такой конструкции представлен на рис. 18.6. Его можно рассматривать как два двигателя, исполнительный и вентиляторный, обмотки статоров которых соединены последовательно. В режиме короткого замыкания (при неподвижном роторе) входное сопротивление исполнительного двигателя весьма незначительно, поэтому большая часть приложенного напряжения приходится на вентиляторный двигатель, ротор которого вращается с большой частотой и хорошо охлаждает исполнительный двигатель. При возрастании частоты вращения ротора исполнительного двигателя вследствие увеличения его входного сопротивления происходит перераспределение напряжений: на исполнительном двигателе оно увеличивается, на вентиляторном — уменьшается. |

2.1.2 Асинхронный двигатель при неподвижном роторе
Электромагнитные процессы в асинхронном двигателе с заторможенным ротором аналогичны процессам, происходящим в трансформаторе. Если к обмотке статора подвести напряжение сети U1, а обмотку ротора разомкнуть (например, в двигателе с фазным ротором с помощью подъема щеток), то вращающееся поле статора, пересекая обмотки статора и ротора, индуктирует в них фазные ЭДС Е1и Е2:
Е1 = 4,44f1w1kоб1Фm;(2-4)
Е2 = 4,44f1w2kоб2Фm , (2-5)
где f1 – частота тока сети;
w1, w2 – числа витков фазных обмоток статора и ротора;
kоб1, kоб2 – обмоточные коэффициенты соответствующих обмоток;
Фm – амплитудное значение основного магнитного потока.
Рассмотренный режим аналогичен режиму холостого хода трансформатора. Однако, относительное значение тока холостого хода у асинхронного двигателя больше, чем у трансформатора из-за двойного воздушного зазора между статором и ротором, который увеличивает магнитные потоки рассеяния. На основании второго закона Кирхгофа для одной фазы статорной обмотки можно записать следующее уравнение
U1 = —E1+jI0x1+I0r1, (2-6)
где U1 – фазное напряжение источника питания;
Е1 – фазная ЭДС статорной обмотки;
I0 – ток холостого хода;
x1 – индуктивное сопротивление рассеяния фазной обмотки статора;
r1 – активное сопротивление этой обмотки.
Коэффициент трансформации ЭДС асинхронного двигателя
 .
(2-7)
.
(2-7)
Если роторную обмотку двигателя замкнуть, а сам ротор затормозить, то двигатель будет работать в режиме короткого замыкания. Относительное значение напряжения короткого замыкания, при котором I1К=I1Н у двигателя больше, чем у трансформатора из-за больших магнитных потоков рассеяния.
Физическая сущность явлений при коротком замыкании асинхронного двигателя та же, что и в трансформаторе. Если пренебречь для режима короткого замыкания МДС, создающей основной магнитный поток, то можно записать
F1= — F2, (2-8)
где F1и F2 – намагничивающие силы статорной и роторной обмоток
F1 = 0,9m1w1kоб1I1, (2-9)
F2= 0,9m2w2kоб2I2, (2-10)
где m1 и m2 – числа фаз соответствующих обмоток.
Из равенства МДС F1 и F2 можно определить коэффициент трансформации токов при m1 = m2 ,
ki= 
По аналогии с трансформатором обмотку ротора приводят к числу фаз и числу витков обмотки статора. Для приведенной асинхронной машины имеем следующие параметры:
E2 = Е1= Е2kE;
I1= I2 = I2/ki; (2-11)
r2 = r2kEki;
x2 = x2kEki;
rk = r1+r2;
xk= x1+x2.
2.1.3 Работа асинхронной машины при вращающемся роторе
В статорной обмотке при переходе от неподвижного ротора к подвижному практически ничего не меняется. В роторной же обмотке изменяется частота ЭДС из-за возникновения скольжения,
f2S = f1s. (2-12)
Для ЭДС и индуктивного сопротивления обмотки ротора можно записать:
E2S = 4,44f2Sw2kоб2Фm = 4,44f1sw2kоб2Фm = E2s; (2-13,а)
x2S = 2f2SL2= 2f1sL2= x2s, (2-13,б)
где L2 — индуктивность рассеяния фазной обмотки ротора.
Активное сопротивление при малой частоте тока в роторной обмотке можно считать неизменным, т.е. r2 = r2 = const, тогда по закону Ома ток в роторной обмотке
 (2-14)
(2-14)
Последнее выражение для тока позволяет режим двигателя с вращающимся ротором привести к эквивалентному режиму при неподвижном роторе. В этом режиме во вторичной цепи вместо ЭДС при вращении ротора E2S с частотой f2S будет существовать ЭДС при неподвижном роторе E2 с частотой f1, а вместо индуктивного сопротивления при вращении ротора x2S во вторичной цепи действует индуктивное сопротивление при неподвижном роторе x2. Для сохранения величины и фазы тока I2 необходимо вместо r2, действующего при вращении, ввести новое сопротивление r2/s. Представим r2/s как
 .
(2-15)
.
(2-15)
Тогда эквивалентная схема роторной цепи имеет вид рисунка 2.1 а схема замещения для приведенной машины изображена на рисунке 2.2 .
Рисунок 2.1 Эквивалентная схема роторной цепи

Рисунок 2.2 Т – образная схема замещения асинхронного двигателя
В приведенной Т – образной схеме замещения скольжение оказывает влияние на все три тока цепи, что затрудняет анализ процессов в двигателе. Поэтому часто применяют Г – образную схему с вынесенной на входные зажимы намагничивающей ветвью (рисунок 2.3).

Рисунок 2.3 Г – образная схема замещения асинхронной машины
В данной схеме с помощью поправочного коэффициента с1 компенсируется некоторая погрешность, возникающая при вынесении намагничивающей ветви на входные зажимы. Этот коэффициент можно определить по формуле
 .
(2-16)
.
(2-16)
На схемах
замещения r1и x1 – фазное активное и индуктивное
сопротивления статорной обмотки, r2
и x2 — аналогичные приведенные сопротивления
роторной обмотки, rm и xm – параметры намагничивающей ветви,  и
и  — элементы, на которых выделяется
электрическая мощность, равная
механической мощности на валу двигателя.
— элементы, на которых выделяется
электрическая мощность, равная
механической мощности на валу двигателя.