


§77. Асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором (рис. 258 и 259) применяют для привода таких машин и механизмов, которые пускаются в ход под нагрузкой (краны, лифты и пр.). В подобных приводах двигатель должен развивать при пуске максимальный момент, что достигается с помощью пускового реостата (см. § 80).
В двигателе с фазным ротором статор выполнен так же, как и в двигателе с короткозамкнутым ротором. На роторе же расположена трехфазная обмотка, состоящая из трех, шести, девяти и т. д. катушек (в зависимости от числа полюсов машины), сдвинутых одна относительно другой на 120° (в двухполюсной машине), 60° (в четырехполюсной) и т. д. Числа полюсов обмоток статора и ротора берутся одинаковыми.
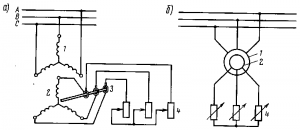 Рис.
258. Электрическая схема асинхронного
двигателя с фазным ротором (а) и его
условное графическое изображение (б):
1 — статор; 2 — ротор; 3 — контактные
кольца со щетками; 4 — пусковой реостат
Рис.
258. Электрическая схема асинхронного
двигателя с фазным ротором (а) и его
условное графическое изображение (б):
1 — статор; 2 — ротор; 3 — контактные
кольца со щетками; 4 — пусковой реостат

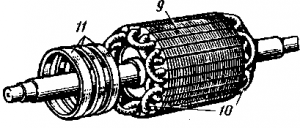 Рис.
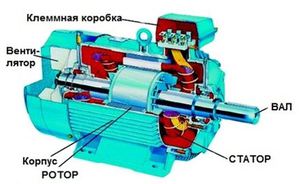
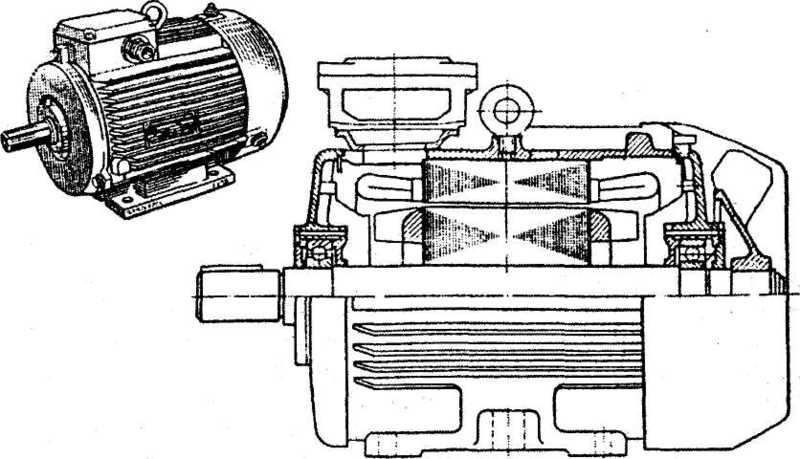
259. Основные конструктивные узлы
асинхронного двигателя с фазным ротором:
1 — приспособление для подъема щеток;
2, 12 —- подшипниковые щиты; 3 — щеткодержатели;
4 — траверса; 5 — обмотка статора; 6 —
остов; 7 — сердечник статора; 8 — коробка
с выводами; 9 — сердечник ротора; 10 —
обмотка ротора; 11 — контактные кольца
Рис.
259. Основные конструктивные узлы
асинхронного двигателя с фазным ротором:
1 — приспособление для подъема щеток;
2, 12 —- подшипниковые щиты; 3 — щеткодержатели;
4 — траверса; 5 — обмотка статора; 6 —
остов; 7 — сердечник статора; 8 — коробка
с выводами; 9 — сердечник ротора; 10 —
обмотка ротора; 11 — контактные кольца
Обмотку фазного ротора обычно соединяют «звездой». Концы ее присоединяют к трем контактным кольцам, к которым посредством щеток подключают трехфазный пусковой реостат, т. е. в каждую фазу ротора в момент пуска вводят дополнительное активное сопротивление.
Для уменьшения износа контактных колец и щеток двигатели с фазным ротором иногда снабжают приспособлениями 1 (см. рис. 259) для подъема щеток и замыкания колец накоротко после выключения реостата.
§78. Режимы работы асинхронных двигателей
Режимы
работы асинхронных двигателей. Холостой
ход. Если пренебречь трением и магнитными
потерями в стали (идеализированная
машина), то ротор асинхронного двигателя
при холостом ходе вращался бы с синхронной
частотой n=n1 в ту же сторону, что и поле статора;
следовательно, скольжение было бы равно
нулю. Однако в реальной машине частота
вращения ротора n при холостом ходе
никогда не может стать равной частоте
вращения n
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры. Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
Нагрузочный режим. Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется
следующим
образом. При увеличении нагрузки на
валу ротора он начинает тормозиться и
частота его вращения т уменьшается. Но
одновременно увеличивается частота
n1—
n персечения вращающимся полем проводников
обмотки ротора, а следовательно, э. д.
с. Е2,
индуцированная в этой обмотке, ток в
роторе I2 и образованный им электромагнитный
вращающий момент М. Этот процесс будет
продолжаться до тех пор, пока
электромагнитный момент двигателя M не
сравняется с нагрузочным моментом Мвн.
При достижении равенства моментов М =
Мвн торможение прекратится и двигатель
будет снова вращаться с постоянной
частотой вращения, но меньшей, чем до
увеличения нагрузки. При уменьшении
нагрузочного момента М
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1
f2/f1 = (n1— n)/n1= s или f2 = f1s (83)
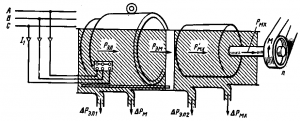
Передача
электрической энергии из статора в
ротор происходит так же, как и в
трансформаторе. Двигатель потребляет
из сети электрическую мощность Pэл = 3U1I1cos?1 и отдает приводимому им во вращение
механизму механическую мощность Рмх (рис. 260). В процессе преобразования
энергии в машине имеют место потери
мощности: электрические в обмотках
статора ?Р
При
возрастании механической нагрузки на
валу двигателя увеличивается ток I
M = cмФтI2 cos?2 (84)
где
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним
физический смысл формулы (84). На рис. 261
изображен ротор двухполюсного асинхронного
двигателя в развернутом виде, на котором
кружками показаны поперечные сечения
проводников. Крестики и точки внутри
проводников обозначают направление в
них тока i2,
а под проводниками — направление
индуцированных э. д. с. e2,
которые пропорциональны индукции В в
данной точке воздушного зазора между
статором и ротором. Кривая В показывает
распределение вдоль окружности ротора
индукции, создаваемой вращающимся
магнитным полем, кривая i
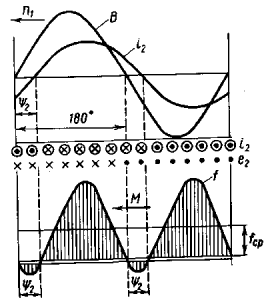 Рис.
261. Распределение индукции В, тока i2 и
электромагнитных сил f, действующих на
проводники асинхронного двигателя
Рис.
261. Распределение индукции В, тока i2 и
электромагнитных сил f, действующих на
проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cos?2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos ?2, вследствие чего активная составляющая тока в обмотке ротора I2cos ?2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент Мmax, который определяет его перегрузочную способность. При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos ?2 и электромагнитный момент М уменьшаются.
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска. В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре. Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель. Для двигателей различных типов и мощностей отношение Мп/Мном = 0,7 – 1,8.
Фазный ротор электродвигателя
Широкое распространение асинхронного электродвигателя (АД) вызвано его надежностью и простотой конструкции. Статор такого двигателя стандартный, представляет собой изготовленный из пластин электростатической стали полый цилиндр с трехфазной обмоткой. Ротор же может быть короткозамкнутым и фазным. Последний вариант получил более широкое распространение по ряду причин, хотя его конструкция намного сложнее, чем у короткозамкнутого ротора.
Конструкция фазного ротора
Фазный ротор АД конструктивно напоминает его статор. Основа ротора набирается из пластин электростатической стали, которые насаживаются на вал. Конструкция имеет продольные пазы, в которые укладываются витки катушек фазной обмотки. Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
В зависимости от напряжения сети, фазы обмотки соединяются “треугольником” или “звездой”. Оси катушек двухполюсного электродвигателя смещены на 120 градусов относительно друг друга.
Контактные кольца изготавливаются из латуни или стали. На вал они посажены с обязательной изоляцией между собой. Щетки расположены на щеткодержатле, изготовлены из металлографита, к кольцам прижимаются посредством пружин.
Зачем нужно добавочное сопротивление?
Добавочное сопротивление служит для запуска двигателя с нагрузкой на его валу. Как только достигаются номинальные обороты вала, сопротивление отключается за ненадобность, а кольца закорачиваются. В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
Роль добавочного внешнего сопротивления, как правило, выполняет ступенчатый реостат. В этом случае двигатель будет разгонятся тоже ступенчато. Часто используются устройства, способные поднять КПД двигателя, при этом избавляя щетки от излишнего трения о кольца. После разгона устройство поднимает щетки и замыкает кольца.
Для реализации автоматического пуска электродвигателя используется подключенная индуктивность к обмотке ротора. Дело в том, что в тот момент, когда осуществляется пуск, в роторе показатели индуктивности и частоты тока максимальны. При разгоне двигателя эти показатели падают, а в конечном итоге двигатель выходит на нормальный рабочий режим.
Отличие короткозамкнутого ротора от фазного
В короткозамкнутом роторе электродвигателя, в отличие от фазного варианта, нет обмоток. Их заменяют замкнутые с торцов между собой кольцами стержни, изготовленные из алюминия или меди. Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название — “беличья клетка”.
Короткозамкнутый ротор приводится во вращение за счет наведения тока магнитным полем статора. Чтобы исключить пульсирование магнитного поля в роторе, стержни “беличьей клетки” располагаются параллельно между собой, но под наклоном относительно оси вращения. АД с короткозамкнутым ротором обладают высокой надежностью за счет отсутствия щеток, которые со временем перетираются. Кроме того, их стоимость меньше, чем у вариантов с фазным ротором.
Преимущества и недостатки электродвигателя с фазным ротором
Широкое распространение АД с фазным ротором получил за счет ряда серьезных преимуществ перед другими машинами подобного рода. Среди них следует отметить большой вращающий момент при запуске, а также относительно постоянную скорость вращения даже при высоких нагрузках. Такие электродвигатели для запуска требуют меньший пусковой ток, а конструкция позволяет использовать автоматические пусковые устройства. Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Как и любой электрический механизм, электродвигатели с фазным ротором имеют ряд недостатков:
- Чувствительность к перепадам напряжения;
- Большие габаритные размеры
- Высокая стоимость;;
- Более сложная конструкция за счет цепи ротора с добавочным сопротивлением;
- Меньшие показатели коэффициента мощности и КПД (относительно АД с короткозамкнутым ротором).
Область применения электродвигателей с фазным ротором
Ад с фазным ротором, за счет высокого крутящего момента, низких пусковых токов и способности долговременно работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в широких диапазонах. Кроме того, эти машины отлично приспособлены под пуск с нагрузкой на валу.
За счет высокой производительности, наиболее часто АД с фазным ротором используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках. Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Проверка электродвигателя с фазным ротором
Как известно, электродвигатели с фазным ротором имеют обмотки как на статоре, так и на роторе, что повышает вероятность выхода из строя именно одной из них.
Для проверки обмоток статора трехфазного АД на целостность, необходимо добраться до клемм их подключения. Затем нужно произвести замеры сопротивлений между фазными клеммами по отдельности, предварительно сняв перемычки. Если сопротивление какой-либо обмотки меньше, чем у других, это свидетельствует о замыкании между ее витками. В этом случае двигатель отдается на перемотку.
Для проверки обмоток ротора, необходимо отыскать выводы от контактных колец. Затем нужно убедиться, что сопротивления обмоток совпадают. Если конструкция электродвигателя предусматривает наличие системы отключения обмоток ротора, отсутствие контакта может быть обусловлено именно поломкой данного механизма, а не обрывом витков.
О наличие какой-либо неисправности АД могут свидетельствовать следующие факторы:
- Снижение скорости вращения при нагрузке. Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети
- Разворачивание АД, когда цепь ротора разомкнута – КЗ в обмотке ротора
- Чрезмерное равномерное повышение температуры двигателя – длительная перегрузка АД или его недостаточное охлаждение
- Нагрев статорной обмотки местного характера – двойное замыкание катушек статора на корпус или между фазами, КЗ между витками, неверное подключение катушек в фазе между собой
- Нагрев стали статора местного характера – нарушение изоляции между листами стали, их оплавление и выгорание, замыкание
- Посторонний шум при работе АД. Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
- Перегорание в обмотке якоря предохранителей, отсутствие контакта в подводящей проводке, выход из строя реостата
Для самостоятельной диагностики и исправления неисправностей электродвигателя необходимыми являются хотя-бы минимальные познания в устройстве АД и электрических цепях в целом. Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
Асинхронный электродвигатель с короткозамкнутым и фазным ротором: устройство и принцип действия
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
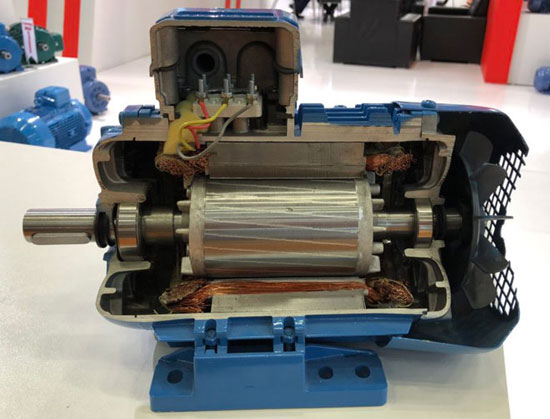
Устройство и принцип действия асинхронного двигателя
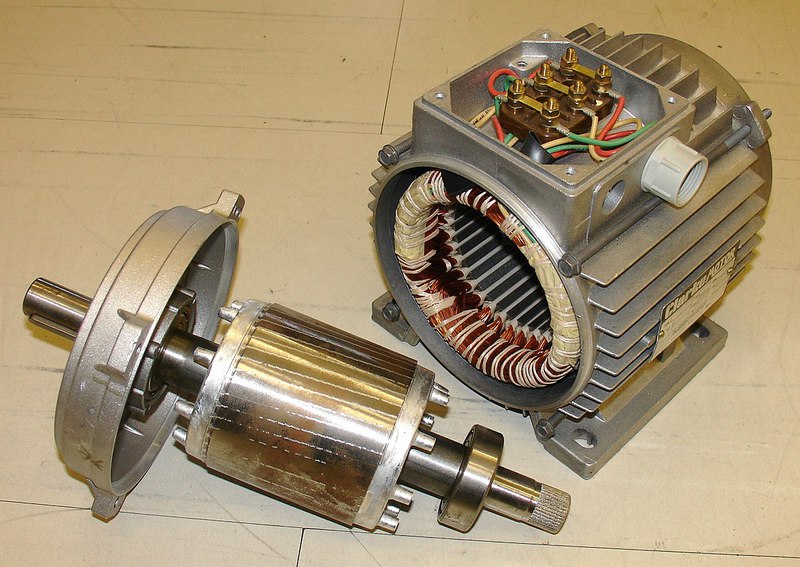
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».

Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором
Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Простое устройство и схема запуска | 1. Небольшой пусковой ток |
| 2. Низкая цена изготовления | 2. Возможность регулировать скорость вращения |
| 3. С увеличением нагрузки скорость вала не меняется | 3. Работа с небольшими перегрузками без изменения частоты вращения |
| 4. Способен переносить перегрузки краткие по времени | 4. Можно применять автоматический пуск |
| 5. Надежен и долговечен в эксплуатации | 5. Имеет большой вращающий момент |
| 6. Подходит для любых условий работы | |
| 7. Имеет высокий коэффициент полезного действия |
Недостатки асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Не регулируется скорость вращения ротора | 1. Большие габариты |
| 2. Маленький пусковой момент | 2. Коэффициент полезного действия ниже |
| 3. Высокий пусковой ток | 3. Частое обслуживание из-за износа щеток |
| 4. Некоторая сложность конструкции и наличие движущихся контактов |
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим — основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
Устройство и принцип работы асинхронных двигателей с фазным ротором
Основная классификация асинхронных двигателей осуществляется в зависимости от особенностей их пусковых свойств, которые определяются нюансами конструкции.

Если рассматривать устройство с фазным ротором, то пуск происходит следующим образом:
- Начало запуска параллельно сопровождается переходом фазного ротора из спокойного состояния к постепенному равномерному вращению, во время которого машина начинает уравновешивать момент сил сопротивления на собственном валу.
- При совершении запуска наблюдается увеличение объемов потребления электроэнергии из сети. Усиленное питание обуславливается необходимостью преодоления тормозного момента, приложенного к валу; передачей движущимся элементам кинетической энергии и компенсацией потерь внутри самого двигателя.
- Начало пускового момента и параметры скольжения в этот период напрямую зависят от активного сопротивления, которое оказывают резисторы, введенные в роторную цепь.
- Иногда показателей малого начального пускового момента бывает недостаточно для того, чтобы перевести асинхронный агрегат в полноценный рабочий режим. В такой ситуации, ускорение не является достаточным, а пусковой электрический ток со значительными показателями воздействует на обмотки двигателя, что вызывает их чрезмерный нагрев. Это может ограничить частоту его включений, а если машина была подключена к электросети с малой мощностью, такой запуск может вызвать понижение общего напряжения, что негативно сказывается на функционировании иных потребителей.
- Благодаря введению в роторную цепь пусковых резисторов происходит понижение показателей электрического тока и пропорциональное увеличение начального пускового момента вплоть до достижения им максимальных параметров.
- Последующее увеличение параметров сопротивления резисторов не является необходимым условием, поскольку оно будет способствовать снижению начального пускового момента и постепенному отклонению от максимальных характеристик его работы. Область скольжения при этом рискует достигнуть недопустимых показателей, что негативно скажется на разгоне ротора.
- Пуск двигателя может быть легким, нормальным или тяжелым, именно этот фактор определит оптимальное значение сопротивления резисторов.
- Далее, необходимо только поддержание достигнутого вращающего момента во время разгона ротора, это позволяет сократить длительность переходного процесса, в котором находится запущенная машина, а также способствует снижению степени нагрева. Для достижения этих целей, осуществляется постепенное понижение показателей сопротивления пусковых резисторов. Параметры допустимого изменения момента зависят от общих условий, которые определяют пиковый предел этого параметра.
- Процесс переключения разных резисторов осуществляется за счет последовательного подключения контакторов ускорения. На протяжении всего пуска, моменты, во время которых достигаются пиковые значения, являются одинаковыми, а периоды переключения равными между собой.
- Процесс отключения машины от электросети разрешается осуществлять при накоротко замкнутой роторной цепи, поскольку, в противном случае имеется риск возникновения перенапряжения в обмоточных фазах статора.
- Параметры напряжения могут достичь значения, которое превосходит его номинальные показатели в 3-4 раза, если во время отключения машины роторная цепь находилась в разомкнутом состоянии.

Технические характеристики
 Основные требования, которые обеспечивают качественное функционирование асинхронных агрегатов с фазным ротором, определены и указаны в соответствующих ГОСТах.
Основные требования, которые обеспечивают качественное функционирование асинхронных агрегатов с фазным ротором, определены и указаны в соответствующих ГОСТах.
Именно они определяют главные технические характеристики и к таким параметрам относятся:
- Габариты и мощность двигателя, которые должны иметь показатели, соответствующие техническому регламенту.
- Уровень защиты должен соответствовать условиям, в которых происходит процесс эксплуатации, поскольку различные виды машин могут быть предназначены для установки на улице или только внутри помещений.
- Высокая степень изоляции, которая должна обладать устойчивостью к повышению рабочей температуры и последующему нагреву.
- Различные виды асинхронных двигателей предназначены для использования в определенных климатических условиях. Это касается в первую очередь установки подобных машин в крайне холодных местностях или, наоборот, жарких областях. Исполнение агрегата должно соответствовать климату местности, в которой проходит процесс эксплуатации.
- Полное соответствие режимам функционирования.
- Наличие системы охлаждения, которая должна соответствовать рабочим режимам машины.
- Уровень шума при запуске агрегата на холостом ходу должен соответствовать второму классу или быть ниже его.
Устройство

Для работы с асинхронными двигателями и полного понимания принципов функционирования подобных машин, необходимо ознакомиться с особенностями их устройства:
- Основными частями конструкции агрегата является статор, находящийся в неподвижном состоянии, и вращающийся ротор, который расположен внутри него.
- Воздушный зазор разделяет оба элемента между собой.
- И статор, и ротор обладают специальной обмоткой.
- Статорная обмотка имеет подключение к питающей электросети с переменным напряжением.
- Роторная обмотка по своей сути является вторичной, поскольку не имеет подключения к сети, а передачу необходимой энергии для нее осуществляет непосредственно статор. Этот процесс происходит благодаря созданию магнитного потока.
- Корпус статора и корпус двигателя – это один элемент, который имеет в своей структуре запрессованный сердечник.
- В пазах сердечника размещены проводники обмотки. Специальный электротехнический лак обеспечивает надежную изоляцию данных объектов друг от друга.
- Обмотка сердечника особым образом разделена на секции, которые соединены в катушки.
- Катушки составляют фазы самого двигателя, к которым происходит подключение фазы от питающей электросети.
- Ротор состоит из вала и сердечника.
- Роторный сердечник создан из набранных пластин, которые изготавливаются из особой разновидности электротехнической стали. На его поверхности имеются симметричные пазы, внутри которых размещены проводники обмотки.
- Роторный вал в ходе работы выполняет функции по передаче крутящего момента непосредственно к приводному механизму машины.
- Роторы обладают собственной классификацией, короткозамкнутая разновидность имеет в своей конструкции стержни, изготовленные из алюминия. Они располагаются внутри сердечника, а на торцах замкнуты специальными кольцами. Подобная система получила название беличьего колеса. В машинах с наиболее высокой мощностью, пазы дополнительно заливаются алюминием, что способствует повышению прочности конструкции.
- Вместо короткозамкнутого ротора в конструкции может присутствовать фазная разновидность. Количество катушек, сдвинутых под определенным углом относительно друг друга, в такой системе зависит от числа парных полюсов. При этом, роторные пары полюсов всегда равны количеству аналогичных пар в статоре. Роторная обмотка соединена особым образом и напоминает по своей форме звезду, а ее лучи выводятся на контакты токосъемных колец, которые соединены при помощи механизма щеточного типа и пускового реостата.
Принцип работы

После освоения устройства асинхронного двигателя с фазным ротором и особенностей его запуска, можно переходить к изучению принципа работы, который заключается в следующем:
- На статор, обладающий тройной обмоткой, начинает подаваться трехфазное напряжение, идущее от внешней электросети с переменным током.
- Последовательно происходит процесс возбуждения магнитного поля, которое начинает совершать вращательные движения.
- Совершаемые вращения постепенно становятся быстрее скорости ротора.
- В определенный момент времени начинает происходить пересечение отдельных линий полей статора и ротора, что обуславливает возникновение электродвижущей силы.
- Электродвижущая сила оказывает прямое воздействие на закороченную обмотку ротора, благодаря чему в ней начинает появляться электрический ток.
- Через определенное время начинает происходить взаимодействие между возникшим в роторе током и статорным магнитным полем, из-за этого образуется крутящий момент, обеспечивающий функционирование асинхронной машины.
Преимущества и недостатки
 Востребованность асинхронных двигателей подобного типа на сегодняшний день обуславливается следующими значимыми преимуществами, которыми они обладают:
Востребованность асинхронных двигателей подобного типа на сегодняшний день обуславливается следующими значимыми преимуществами, которыми они обладают:
- Значительные показатели, которых способен достигать начальный вращающий момент после запуска машины.
- Механические перегрузки, которые возникают на протяжении коротких промежутков времени, переносятся агрегатом без каких-либо значимых последствий и не оказывают влияния на процесс функционирования машины.
- При возникновении разнообразных перегрузок в системе, двигатель сохраняет постоянную скорость, возможные отклонения не являются значимыми.
- Показатели пускового тока значительно меньше, чем у большинства асинхронных аналогов, например, имеющих в своей конструкции короткозамкнутый ротор.
- Использование подобных агрегатов предусматривает возможность использования систем, автоматизирующих процесс их запуска и введения в рабочее состояние.
- Конструкция и устройство таких машин являются довольно простыми.
- Запуска агрегата осуществляется по простой схеме, не подразумевающей значимых усилий.
- Относительно невысокая стоимость.
- Обслуживание таких машин не требует значительных затрат сил и времени.
Однако, при таком большом количестве положительных сторон, асинхронные двигатели с фазным ротором обладают и некоторыми недостатками, основными из них являются следующие особенности подобных машин:
- Слишком большие размеры двигателя, которые могут причинять некоторые неудобства при монтаже и эксплуатации.
- Коэффициент полезного действия и общая выработка у них намного ниже, чем у многих аналогов. Разновидность агрегатов с короткозамкнутым ротором значительно превосходит их по этим показателям.
Применение
На сегодняшний день, большая часть двигателей, выпускаемых в промышленных масштабах, относится к асинхронной разновидности.
Благодаря ряду преимуществ, которыми обладают машины с фазными роторами, они широко используются в разных сферах человеческой деятельности, в том числе для поддержания работы:
- Устройств автоматики и приборов из телемеханической области.
- Бытовых приборов.
- Медицинского оборудования.
- Оборудования, предназначенного для осуществления аудиозаписи.
Статья была полезна?
0,00 (оценок: 0)
«Асинхронные электродвигатели с фазным ротором» «Пуск ад с фазным ротором»
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
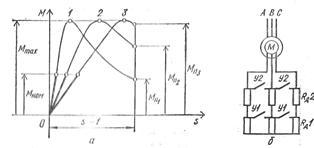
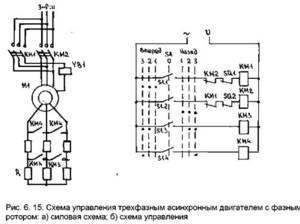
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток Iп = (4,5 — 7) Iном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.

Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1, а, кривая 3), если критическое скольжение двигателя с фазным ротором
sкр = (R2′ + Rд’) / (Х1 + Х2′) = 1,
где Rд’ — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 — 0,4) Mном, нормальным, если Мп — (0,5 — 0,75) Мном, и тяжелым при Мп ≥ Мном.
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.
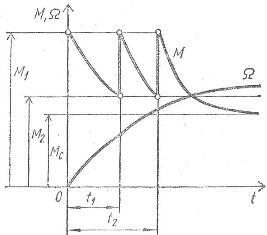
Рис. 2. Пусковые характеристики трехфазного асинхронного двигателя с фазным ротором

Переключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1, t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1= (1,5 — 2,5) Iном и ток переключения I2, который должен обеспечить момент переключения М2 > Мc.
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
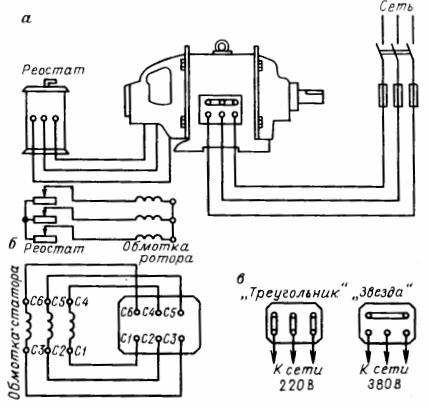
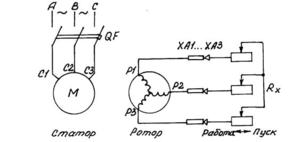
Рис. 3. Схема соединения обмоток двигателя с фазным ротором: а — к питающей сети, б — ротора, в — на доске зажимов.
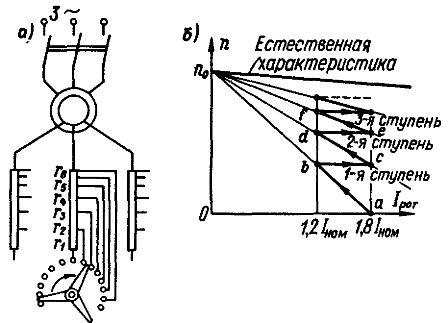
Рис. 4. Пуск двигателя с фазным ротором: а — схема включения, б — механические характеристики
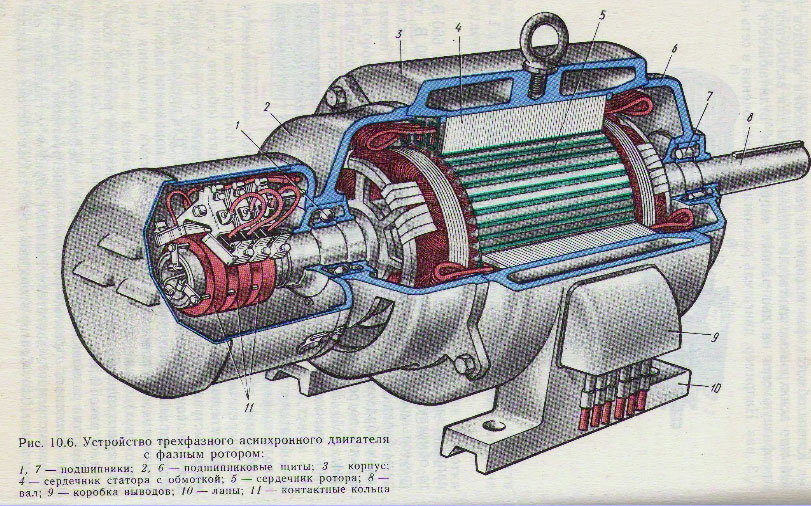
21. Устройство трехфазного асинхронного двигателя с фазным ротором.
Недостатком асинхронного двигателя с короткозамкнутым ротором является большой пусковой ток, который превышает номинальный ток в 5-7 раз.
Желая улучшить пусковые характеристики асинхронного двигателя, М. О. Доливо-Добровольский разработал двигатель с фазным ротором.
Асинхронный двигатель с фазным ротором имеет обычный для асинхронных двигателей статор с трехфазной сетевой обмоткой, но на поверхности ротора также находится трехфазная обмотка. Три фазные обмотки ротора соединяются на самом роторе звездой, а свободные их концы соединяются с тремя изолированными друг от друга контактными кольцами, укрепленными на валу машины и изолированными от него (рис. 8.6). Поэтому асинхронный двигатель с фазным ротором называют также асинхронным двигателем с контактными кольцами.
Контактные
кольца соприкасаются со щетками,
установленными в неподвижных
щеткодержателях. Через кольца и щетки
обмотка ротора замыкается на пусковой
трехфазный реостат, который изменяет
активное сопротивление обмотки ротора
в момент пуска. Обмотка статора такого
двигателя включается непосредственно
в трехфазную сеть (рис. 8.7).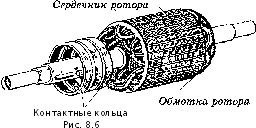

Эта система используется либо для пуска (для уменьшения пускового тока при одновременном сохранении вращающего момента), либо для регулирования скорости вращения ротора двигателя. После разгона ротора пусковой реостат выключается, и обмотка закорачивается с помощью специального центробежного автоматического замыкателя. Для уменьшения потерь на трение в некоторых двигателях с фазным ротором имеются приспособления для отвода щеток от контактных колец после их замыкания.
Одним из важнейших достоинств асинхронного двигателя с фазным ротором является то, что в момент пуска создается большой вращающий момент при значительно меньших, чем у короткозамкнутых двигателей, пусковых токах. Объясняется это тем, что асинхронный двигатель при пуске развивает максимальный вращающий момент тогда, когда активное сопротивление ротора будет равно индуктивному сопротивлению двигателя. А так как у двигателей с фазным ротором активное сопротивление ротора можно изменять с помощью пускового реостата, то и пусковые характеристики их значительно лучше, чем у двигателей с короткозамкнутым ротором.
Пуск асинхронного двигателя с фазным ротором производится следующим образом. Пусковой реостат устанавливается на холостую клемму (цепь ротора разомкнута), а на статор подается сетевое напряжение. Затем включается пусковой реостат, и его сопротивление постепенно уменьшают и делают равным нулю, когда двигатель приобретет номинальную скорость. Пусковой ток двигателя с фазным ротором превышает номинальный всего в 1,5-2 раза. Кроме того, включение в цепь ротора пускового реостата значительно увеличивает вращающий момент.
Сущность процесса регулирования скорости асинхронного двигателя с фазным ротором при помощи регулировочного реостата сводится к следующему. Ротор двигателя обладает определенной инерцией, и поэтому сразу после введения
реостата его скорость и индуцируемая в роторе ЭДС Е2 в
начальный момент остаются неизменными. Увеличение сопротивления пускового реостата в цепи ротора вызывает
уменьшение тока ротора 12, что приводит к уменьшению вращающего момента (см. формулу (8.3)). Вследствие этого скорость вращения ротора п2 начнет уменьшаться. Уменыпение скорости п2 аналогично увеличению скольжениям, вследствие чего индуцируемая в роторе ЭДС Е2, пропорциональная s, также начнет расти, вызывая увеличение тока ротора I2. Рост тока I2 и уменьшение скорости вращения ротора п2
будет продолжаться до тех пор, пока ток I2 не достигнет своего прежнего значения. В этом случае вращающий момент снова станет равным статическому, и двигатель начнет вращаться с постоянной скоростью, величина которой будет уже несколько меньше, чем до введения реостата. Регулировка скорости асинхронного двигателя с фазным ротором может осуществляться только в сторону уменьшения оборотов.
принцип работы, устройство и сферы применения асинхронного двигателя
 Асинхронный двигатель (АД) с фазным ротором представляет собой многофункциональную силовую установку, которая поддерживает регулировку с помощью внесения в роторную цепь добавочных сопротивлений. От классических моделей с короткозамкнутым ротором агрегат отличается более высоким пусковым моментом и низким пусковым током. Классификация устройств осуществляется с учетом их свойств и конструкции.
Асинхронный двигатель (АД) с фазным ротором представляет собой многофункциональную силовую установку, которая поддерживает регулировку с помощью внесения в роторную цепь добавочных сопротивлений. От классических моделей с короткозамкнутым ротором агрегат отличается более высоким пусковым моментом и низким пусковым током. Классификация устройств осуществляется с учетом их свойств и конструкции.
Общая информация
Чтобы понять, как работает асинхронный двигатель с фазным ротором, необходимо внимательно изучить особенности его пуска. При запуске установки ее ротор параллельно переходит из состояния покоя в медленное и равномерное вращение. При этом система уравновешивает момент сил сопротивления посредством собственного вала.
 Во время запуска начинается усиленное потребление энергетических ресурсов, что связано с преодолением тормозного момента и компенсацией потерь внутри силовой установки. Нередко параметры начального пускового момента далеки от требуемых, поэтому асинхронный двигатель не способен перейти в режим полноценной работы. В таком случае ускорение приостанавливается, а постоянное воздействие чрезмерного тока приводит к перегреву внутренних узлов установки.
Во время запуска начинается усиленное потребление энергетических ресурсов, что связано с преодолением тормозного момента и компенсацией потерь внутри силовой установки. Нередко параметры начального пускового момента далеки от требуемых, поэтому асинхронный двигатель не способен перейти в режим полноценной работы. В таком случае ускорение приостанавливается, а постоянное воздействие чрезмерного тока приводит к перегреву внутренних узлов установки.
По этой причине частота запусков двигателя ограничивается несколькими включениями. Если агрегат работал от электрической сети с низкой мощностью, тогда подобное явление может снизить общее напряжение и нарушить работу других приборов, присоединенных к этой линии.
Наличие в роторной цепи пусковых резисторов снижает показатели электрического тока, но при этом поднимает начальный пусковой момент, пока он не достигнет пиковой отметки. Запуск силовой установки бывает легким, нормальным или тяжелым.
В зависимости от этого фактора можно определить оптимальные параметры сопротивления резисторов.
После успешного запуска остается поддерживать стабильный вращающий момент на этапе разгона ротора, что сократит продолжительность перехода из спокойного состояния в стадию вращения и снизит вероятность нагрева. Для этого необходимо уменьшить показатели сопротивления резисторов.
Переключение разных резисторов происходит из-за подключения контакторов ускорения в последовательном порядке. Отключать двигатель от электрической сети можно только при накоротко замкнутой роторной цепи. Если это требование проигнорировать, то появится риск существенного перенапряжения в обмоточных фазах статора.
Технические характеристики
Существуют установленные требования, гарантирующие качественную работу асинхронных двигателей с фазным ротором. От них зависят базовые параметры и характеристики системы, включая:
- Размеры и мощность установки, соответствующие техническому регламенту.
- Защиту от внешних воздействий. Ее степень определяется окружающими условиями, в которых будет расположена машина. Дело в том, что одни установки предназначаются для работы внутри помещения, в то время как другие способны функционировать и на улице. К тому же доступные на рынке агрегаты отличаются климатическими особенностями. Например, существуют двигатели, которые выдерживают экстремальный холод или, наоборот, сильную жару. В зависимости от условий использования они обладают характерным исполнением и защитой.
 Степень изоляции. Асинхронные двигатели с фазным ротором должны быть устойчивыми к высоким температурным показателям и возможным нагревам внутренних механизмов. Для предотвращения воспламенений их защищают специальными изоляционными слоями.
Степень изоляции. Асинхронные двигатели с фазным ротором должны быть устойчивыми к высоким температурным показателям и возможным нагревам внутренних механизмов. Для предотвращения воспламенений их защищают специальными изоляционными слоями.- Соответствие установленным стандартам и режимам функционирования.
- Наличие мощной охладительной системы, которая соответствует рабочему режиму двигателя.
- Уровень шума во время запуска на холостом ходу. Он соответствует второму классу или ниже.
 Степень изоляции. Асинхронные двигатели с фазным ротором должны быть устойчивыми к высоким температурным показателям и возможным нагревам внутренних механизмов. Для предотвращения воспламенений их защищают специальными изоляционными слоями.
Степень изоляции. Асинхронные двигатели с фазным ротором должны быть устойчивыми к высоким температурным показателям и возможным нагревам внутренних механизмов. Для предотвращения воспламенений их защищают специальными изоляционными слоями.Устройство и конструкция
Желая купить асинхронный электродвигатель с фазным ротором, необходимо хорошо разбираться в его устройстве и конструкционных особенностях. В первую очередь нужно знать, что к основным частям установки относятся статор, который является неподвижным, и ротор — вращающийся механизм внутри статора. Между обоими элементами расположен воздушный зазор, а их поверхность покрыта специальной обмоткой.
 Обмотка статора подключена к электрической сети с переменным напряжением, которое передается на обмотку ротора. Взаимодействие узлов обусловлено магнитным потоком.
Обмотка статора подключена к электрической сети с переменным напряжением, которое передается на обмотку ротора. Взаимодействие узлов обусловлено магнитным потоком.
Что касается корпуса статора, то в качестве него используется корпус двигателя, внутри которого расположен запрессованный сердечник. В последнем находятся проводники обмотки, защищенные от замыкания изоляцией. Обмотка сердечника состоит из нескольких секций, заключенных в катушки.
В роторе установлены вал и сердечник из набранных пластин. Последний элемент создается на основе высокотехнологичной стали и обладает симметричными пазами с проводниками. При работе вал ротора передает крутящий момент к приводу установки. В зависимости от типа ротора выделяют две разновидности двигателей:
- С короткозамкнутым ротором.
- С фазным ротором.
В первом типе роторов присутствуют алюминиевые стержни, которые находятся внутри сердечника и замкнуты на торцах кольцами. Их также называют «беличьим колесом». Обычно пазы установки обрабатываются алюминием, что повышает их прочность.
Фазный ротор асинхронного двигателя существенно отличается от предыдущей разновидности. Число катушек, установленных под конкретным углом, в таких моделях определяется количеством парных полюсов. При этом пары полюсов в роторе такого типа всегда сопоставимы с аналогичными статорными парами.
Принцип работы
Изучив устройство АД с фазным ротором и его запуск, можно приступать к более подробному рассмотрению работы такой установки. Её можно разделить на несколько пунктов:
- На статор с тройной обмоткой подается трехфазное напряжение от электрической сети с переменным током.
- Затем начинается образование магнитного поля, которое приводит к вращению ротора. По мере ускорения вращательных движений скорость оборотов ротора существенно растет.
- По достижении определенных показателей отдельные линии полей обоих узлов пересекаются, что вызывает появление электродвижущей силы. Она воздействует на роторную обмотку, за счет чего в ней формируется электрический ток.
- В определенный момент времени между магнитным полем статора и током в роторе начинается взаимодействие, образующее крутящий момент. Именно за счет него и осуществляется работа асинхронного двигателя.
Плюсы и минусы
В последнее время асинхронные агрегаты пользуются большой популярностью. Она связана с массой преимуществ, которыми они обладают. В их числе:
- Высокие значения при начальном вращающем моменте.
- Способность принимать любые механические перегрузки без существенного изменения КПД или нарушения стабильной работы установки. Даже если в системе возникают разнообразные перегрузки, агрегат продолжает функционировать с заданной скоростью и практически не отклоняется от базового режима.
- Сниженный пусковой ток. В отличие от других асинхронных моделей, например, с короткозамкнутым ротором, у этих двигателей сравнительно низкие показатели пускового тока.
- Возможность полной автоматизации работы.
- Простота конструкции.
- Простая схема запуска.
- Сравнительно невысокая цена.
- Отсутствие необходимости сложного и дорогостоящего обслуживания.
 Сниженный пусковой ток. В отличие от других асинхронных моделей, например, с короткозамкнутым ротором, у этих двигателей сравнительно низкие показатели пускового тока.
Сниженный пусковой ток. В отличие от других асинхронных моделей, например, с короткозамкнутым ротором, у этих двигателей сравнительно низкие показатели пускового тока.Кроме множества плюсов у двигателей этого типа имеются и недостатки. К ключевым минусам относят довольно крупные габариты, из-за которых монтаж и дальнейшая эксплуатация системы усложняются, а также сниженный КПД по сравнению со многими аналогами.
По последнему показателю устройства с короткозамкнутым ротором более продуктивные.
Сферы применения
В настоящее время многие промышленные двигатели являются асинхронными. Их популярность обусловлена вышеперечисленными плюсами и доступностью. Сферы применения таких агрегатов очень обширные, поэтому их активно используют для работы автоматизированных устройств из телемеханической сферы, бытового и медицинского оборудования и звукозаписывающих установок. Асинхронный двигатель — это полезное изобретение нынешнего времени, которое упрощает жизнь человека и обеспечивает хороший КПД при минимальных затратах электроэнергии.