


Асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором – это двигатель, который можно регулировать с помощью добавления в цепь ротора добавочных сопротивлений. Обычно такие двигатели применяются при пуске с нагрузкой на валу, так как увеличение сопротивления в цепи ротора, позволяет повысить пусковой момент и уменьшить пусковые токи. Этим асинхронный двигатель с фазным ротором выгодно отличается от АД с короткозамкнутым ротором.
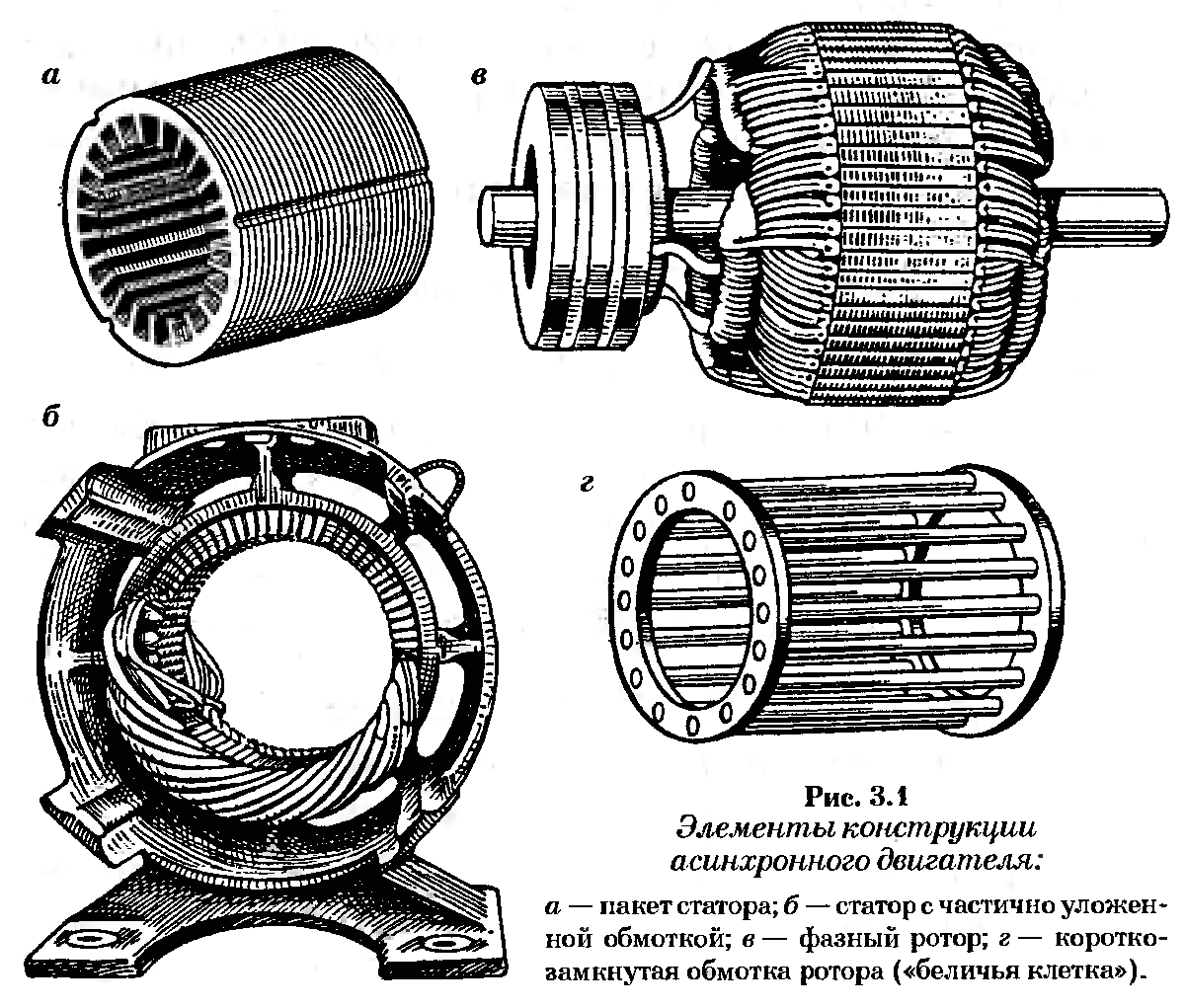
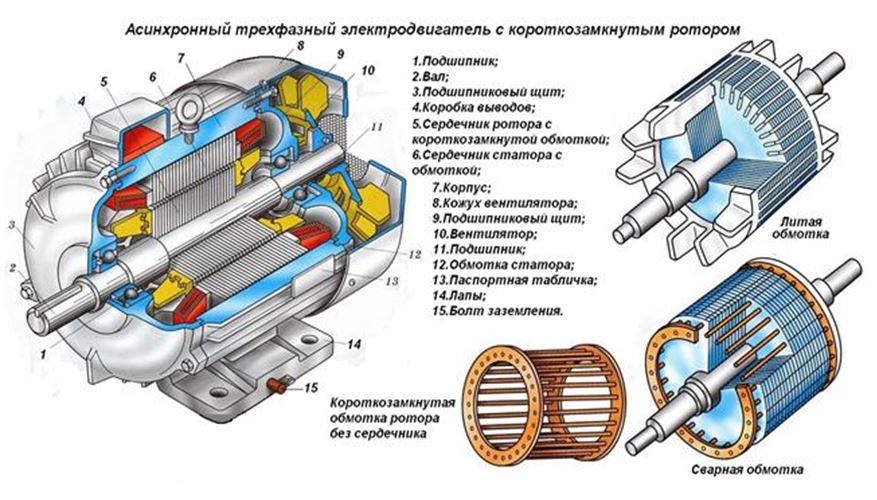
Статор (3) выполнен, так же как и в обычном асинхронном двигателе, он представляет из себя полый цилиндр, набранный из листов электротехнической стали, в который уложена трехфазная обмотка.
Ротор (4) по сравнению с короткозамкнутым, представляет из себя более сложную конструкцию. Он состоит из сердечника в который уложена трехфазная обмотка, аналогично обмотке статора. Отсюда название двигателя. Если двигатель двухполюсный, то обмотки ротора смещены геометрически друг относительно друга на 120.
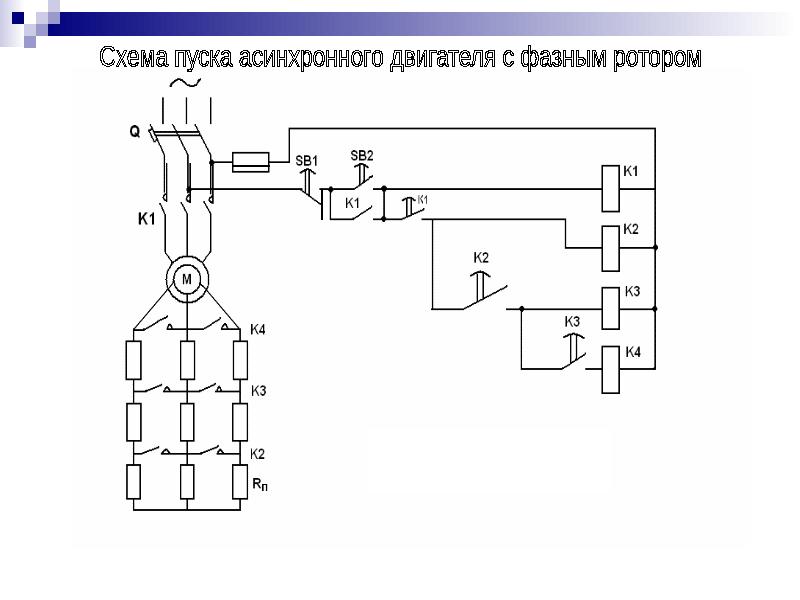
Добавочное сопротивление вводится только при пуске двигателя. Причем им обычно служит ступенчатый реостат, сопротивление которого уменьшают с увеличением оборотов двигателя. Таким образом пуск двигателя осуществляется тоже ступенчато. После того, как разгон закончился и двигатель вышел на естественную механическую характеристику, обмотку ротора закорачивают. Для того, чтобы сохранить щетки и снизить потери на них, в двигателях с фазным ротором существует специальное устройство, которое поднимает щетки и замыкает кольца. Таким образом, удается повысить еще и КПД двигателя.
Добавочное сопротивление позволяет главным образом осуществить пуск двигателя под нагрузкой, работать с ним длительное время двигатель не может, так как механические характеристики слишком мягкие и работа двигателя на них нестабильна.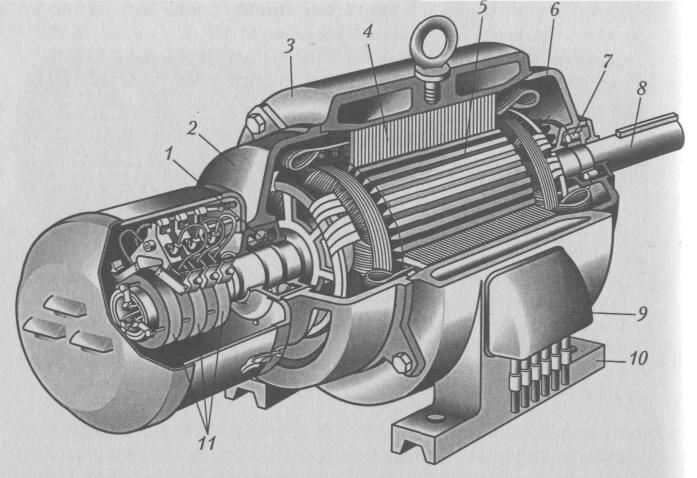
Для того чтобы автоматизировать пуск двигателя, в обмотку ротора включают индуктивность. В момент пуска, частота тока в роторе наибольшая, а значит и индуктивное сопротивление максимально. Затем, при разгоне двигателя, частота, как и сопротивление уменьшаются, и двигатель постепенно начинает работать в обычном режиме.
За счет усложнения своей конструкции, асинхронный двигатель с фазным ротором, обладает хорошими пусковыми и регулировочными характеристиками. Но по той же причине, его стоимость возрастает приблизительно в 1.5 по сравнению с обычным АД, кроме того увеличивается масса, размеры и как правило, уменьшается надежность двигателя.
Какак разница между короткозамкнутым и фазным ротором
Какак разница между короткозамкнутым и фазным ротором
Ротор — вращающаяся часть двигателей и рабочих машин, на которой расположены органы, получающие энергию от рабочего тела или отдающие её рабочему телу.
Как вы знаете, асинхронные электродвигатели имеют трехфазную обмотку (три отдельные обмотки) статора, которая может формировать разное количество пар магнитных полюсов в зависимости от своей конструкции, что влияет в свою очередь на номинальные обороты двигателя при номинальной частоте питающего трехфазного напряжения. При этом роторы двигателей данного типа могут отличаться, и у асинхронных двигателей они бывают короткозамкнутыми или фазными. Чем отличается короткозамкнутый ротор от фазного ротора — об этом и пойдет речь в данной статье.
При этом роторы двигателей данного типа могут отличаться, и у асинхронных двигателей они бывают короткозамкнутыми или фазными. Чем отличается короткозамкнутый ротор от фазного ротора — об этом и пойдет речь в данной статье.
Короткозамкнутый ротор
Представления о явлении электромагнитной индукции подскажут нам, что произойдет с замкнутым витком проводника, помещенным во вращающееся магнитное поле, подобное магнитному полю статора асинхронного двигателя. Если поместить такой виток внутри статора, то когда ток на обмотку статора будет подан, в витке будет индуцироваться ЭДС, и появится ток, то есть картина примет вид: виток с током в магнитном поле. Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Так и работает асинхронный двигатель с короткозамкнутым ротором, только вместо витка на его роторе расположены медные или алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора. Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Проходящий по обмоткам статора переменный ток, порождающий вращающееся магнитное поле, наводит ток в замкнутых контурах «беличьей клетки», и весь ротор приходит во вращение, поскольку в каждый момент времени разные пары стержней ротора будут иметь различные индуцируемые токи: какие-то стержни — большие токи, какие-то — меньшие, в зависимости от положения тех или иных стержней относительно поля. И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.
К тому же стержни «беличьей клетки» немного наклонены по отношению к оси вращения — они не параллельны валу. Наклон сделан для того, чтобы момент вращения сохранялся постоянным и не пульсировал, кроме того наклон стержней позволяет снизить действие высших гармоник индуцируемых в стержнях ЭДС.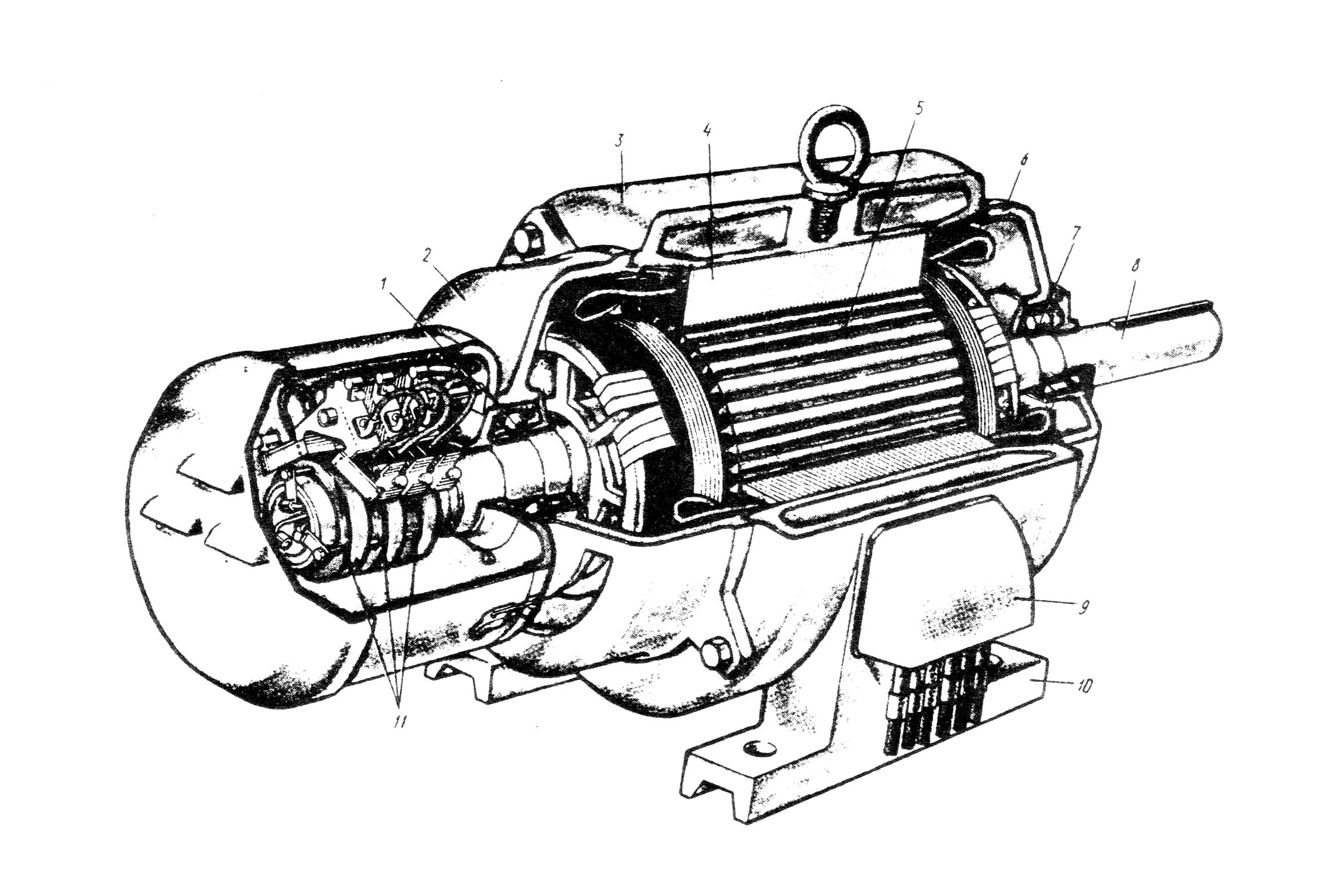
Скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля, то есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться. Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует.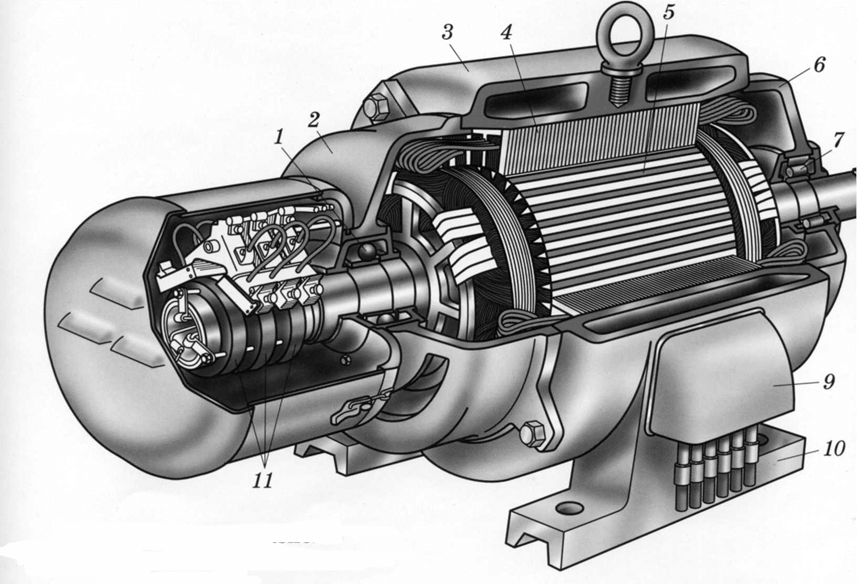 При коротком замыкании (ротор застопорен) скольжение равно 1.
При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Фазный ротор
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором, и аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т. д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
Ранее ЭлектроВести писали, что в Атлантическом океане первый в мире телескопический ветрогенератор обеспечивает электроэнергией 5000 домохозяйств на одном из Канарских островов — Гран-Канария.
По материалам: electrik.info.
Асинхронные электродвигатели с фазным ротором
Асинхронные электродвигатели с фазным ротором используются во многих приводах высокой мощности. Наиболее часто их применяют в сырьевой промышленности, например, при добыче руды и минералов или на производствах связующих веществ, таких как цемент, известняк и гипс, в различного рода дробильных установках, роликовых прессах и прокатных станах, а также в крупногабаритных вентиляторах, насосах и конвейерах.
Асинхронные электродвигатели с фазным ротором используются во многих приводах высокой мощности. Наиболее часто их применяют в сырьевой промышленности, например, при добыче руды и минералов или на производствах связующих веществ, таких как цемент, известняк и гипс, в различного рода дробильных установках, роликовых прессах и прокатных станах, а также в крупногабаритных вентиляторах, насосах и конвейерах.
К сожалению, наиболее прочные и наиболее экономичные асинхронные короткозамкнутые электродвигатели обладают свойством, из-за которого их пуск непосредственно от сети затруднен, а в некоторых случаях невозможен. Так, в состоянии покоя и на небольших оборотах в момент пуска они создают лишь малый крутящий момент, хотя при этом требуют очень сильный ток, превышающий номинальный ток электродвигателя в несколько раз. Поэтому работающая от привода машина, технологический процесс и сеть до привода ограничивают применение данного простейшего концепта привода.
Например, для работы загруженного прокатного стана нужен очень большой крутящий момент при пуске или же особый пусковой момент трогания величиной, вероятно, намного превышающей номинальный крутящий момент используемого электродвигателя. Большая инерция загруженного стана приводит к продолжительному периоду выхода на рабочий режим, поэтому нужный высокий крутящий момент необходим в течение продолжительного времени даже при малых оборотах. Если по требованиям технологического процесса пуск выполняется несколько раз в день, то тепловая нагрузка на элементы привода в этом случае довольно высокая, что может ограничивать число пусков.
Если по требованиям технологического процесса пуск выполняется несколько раз в день, то тепловая нагрузка на элементы привода в этом случае довольно высокая, что может ограничивать число пусков.
В случае высокого отношения номинальной мощности электродвигателя к нагрузочной способности сети до электродвигателя большая перегрузка по току при пуске приводит к существенной просадке напряжения, что может вызвать перебои в работе параллельных потребителей. Это и есть случай установки одиночных электродвигателей большой мощности относительно общей мощности сети.
Конструкция асинхронного электродвигателя с фазным ротором при использовании компактного пускового устройства позволяет достичь пусковой момент соизмеримый с максимальным моментом двигателя, что в частности может достигать двух- а то и трехкратному номинальному моменту, при этом пусковой ток соответствует номинальному току двигателя, либо незначительно его больше.
В таких случаях использование асинхронных электродвигателей с фазным ротором является более рациональным.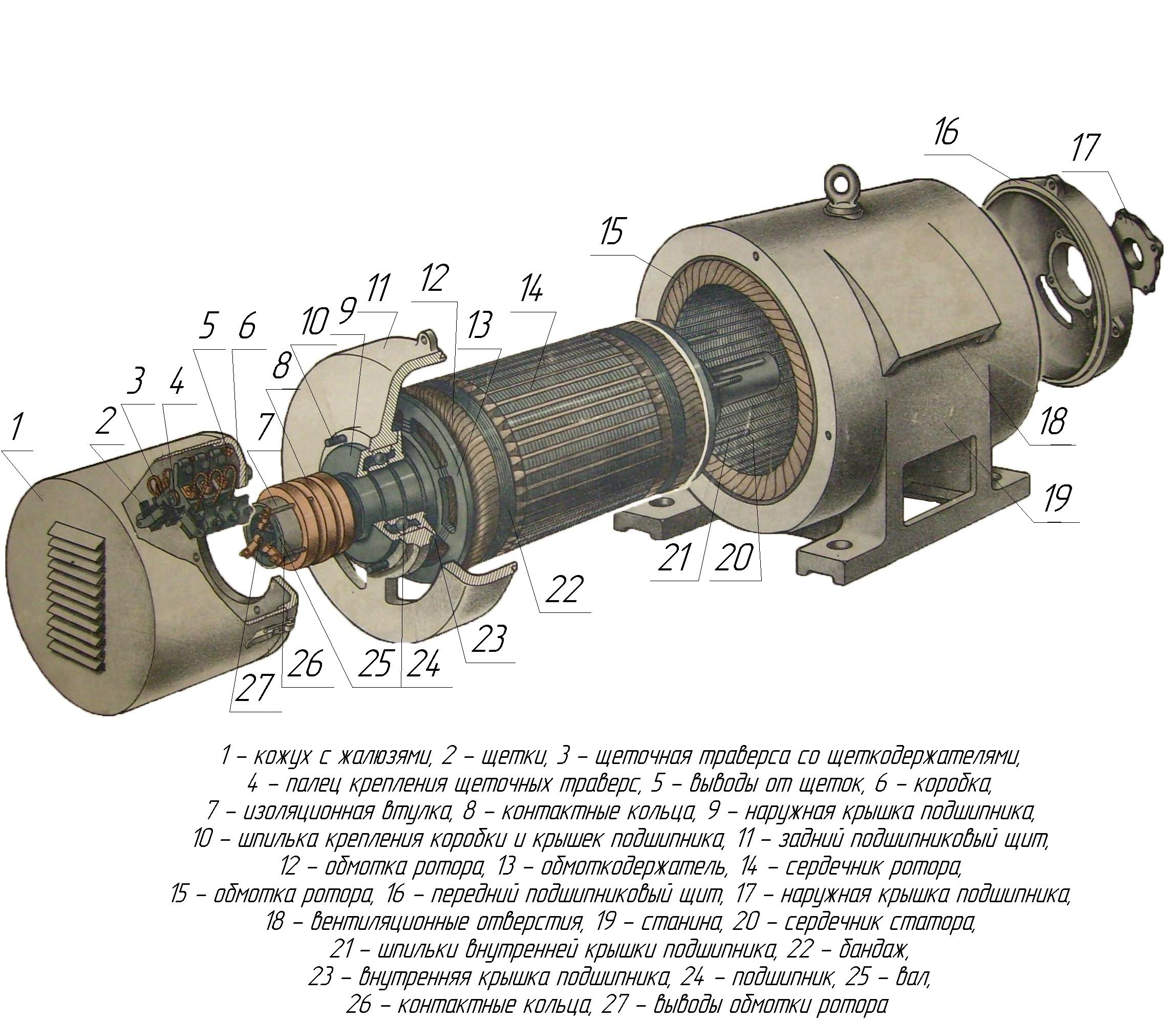 В отличие от частотно-регулируемых приводов, когда для больших пусковых моментов необходимо использовать преобразователи, мощностью большей номинальной, что в номинальном режиме повышает потери, пусковой момент асинхронного двигателя с фазным ротором зависит от его физических свойств, а пусковой реостат работает только в процессе разгона. При изменении пусковой характеристики с помощью изменения внешнего сопротивления роторной цепи возникают лишь незначительно большие потери в двигателе, таким образом количество допустимых пусков не ограничивается нагревостойкостью самого двигателя.
В отличие от частотно-регулируемых приводов, когда для больших пусковых моментов необходимо использовать преобразователи, мощностью большей номинальной, что в номинальном режиме повышает потери, пусковой момент асинхронного двигателя с фазным ротором зависит от его физических свойств, а пусковой реостат работает только в процессе разгона. При изменении пусковой характеристики с помощью изменения внешнего сопротивления роторной цепи возникают лишь незначительно большие потери в двигателе, таким образом количество допустимых пусков не ограничивается нагревостойкостью самого двигателя.
Общая характеристика:
- Очень высокий пусковой крутящий момент, превышающий номинальный в два-три раза
- Низкий пусковой ток, не превышающий или незначительно превышающий номинальный ток
- Ограниченное только пускателем время выхода на рабочий режим и число пусков
- Отсутствующие или крайне низкие пульсации крутящего момента на пуске в зависимости от типа пускателя
- Высокий КПД в режиме непрерывной работы (нет потерь дополнительных устройств)
- Не требуются особые условия окружающей среды
- Нет нелинейных искажений
- Не требуются меры по защите от электромагнитных помех, не требуется экранированный соединительный кабель
Асинхронные двигатели с фазным ротором
Основная классификация асинхронных двигателей осуществляется в зависимости от особенностей их пусковых свойств, которые определяются нюансами конструкции.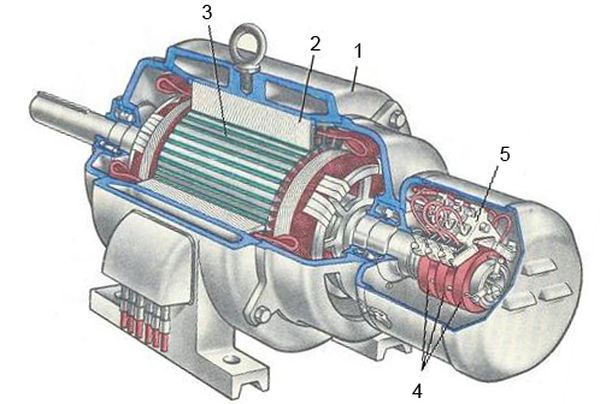
Если рассматривать устройство с фазным ротором, то пуск происходит следующим образом:
- Начало запуска параллельно сопровождается переходом фазного ротора из спокойного состояния к постепенному равномерному вращению, во время которого машина начинает уравновешивать момент сил сопротивления на собственном валу.
- При совершении запуска наблюдается увеличение объемов потребления электроэнергии из сети. Усиленное питание обуславливается необходимостью преодоления тормозного момента, приложенного к валу; передачей движущимся элементам кинетической энергии и компенсацией потерь внутри самого двигателя.
- Начало пускового момента и параметры скольжения в этот период напрямую зависят от активного сопротивления, которое оказывают резисторы, введенные в роторную цепь.
- Иногда показателей малого начального пускового момента бывает недостаточно для того, чтобы перевести асинхронный агрегат в полноценный рабочий режим.
 В такой ситуации, ускорение не является достаточным, а пусковой электрический ток со значительными показателями воздействует на обмотки двигателя, что вызывает их чрезмерный нагрев. Это может ограничить частоту его включений, а если машина была подключена к электросети с малой мощностью, такой запуск может вызвать понижение общего напряжения, что негативно сказывается на функционировании иных потребителей.
В такой ситуации, ускорение не является достаточным, а пусковой электрический ток со значительными показателями воздействует на обмотки двигателя, что вызывает их чрезмерный нагрев. Это может ограничить частоту его включений, а если машина была подключена к электросети с малой мощностью, такой запуск может вызвать понижение общего напряжения, что негативно сказывается на функционировании иных потребителей. - Благодаря введению в роторную цепь пусковых резисторов происходит понижение показателей электрического тока и пропорциональное увеличение начального пускового момента вплоть до достижения им максимальных параметров.
- Последующее увеличение параметров сопротивления резисторов не является необходимым условием, поскольку оно будет способствовать снижению начального пускового момента и постепенному отклонению от максимальных характеристик его работы. Область скольжения при этом рискует достигнуть недопустимых показателей, что негативно скажется на разгоне ротора.
- Пуск двигателя может быть легким, нормальным или тяжелым, именно этот фактор определит оптимальное значение сопротивления резисторов.
- Далее, необходимо только поддержание достигнутого вращающего момента во время разгона ротора, это позволяет сократить длительность переходного процесса, в котором находится запущенная машина, а также способствует снижению степени нагрева. Для достижения этих целей, осуществляется постепенное понижение показателей сопротивления пусковых резисторов. Параметры допустимого изменения момента зависят от общих условий, которые определяют пиковый предел этого параметра.
- Процесс переключения разных резисторов осуществляется за счет последовательного подключения контакторов ускорения. На протяжении всего пуска, моменты, во время которых достигаются пиковые значения, являются одинаковыми, а периоды переключения равными между собой.
- Процесс отключения машины от электросети разрешается осуществлять при накоротко замкнутой роторной цепи, поскольку, в противном случае имеется риск возникновения перенапряжения в обмоточных фазах статора.
- Параметры напряжения могут достичь значения, которое превосходит его номинальные показатели в 3-4 раза, если во время отключения машины роторная цепь находилась в разомкнутом состоянии.
 В такой ситуации, ускорение не является достаточным, а пусковой электрический ток со значительными показателями воздействует на обмотки двигателя, что вызывает их чрезмерный нагрев. Это может ограничить частоту его включений, а если машина была подключена к электросети с малой мощностью, такой запуск может вызвать понижение общего напряжения, что негативно сказывается на функционировании иных потребителей.
В такой ситуации, ускорение не является достаточным, а пусковой электрический ток со значительными показателями воздействует на обмотки двигателя, что вызывает их чрезмерный нагрев. Это может ограничить частоту его включений, а если машина была подключена к электросети с малой мощностью, такой запуск может вызвать понижение общего напряжения, что негативно сказывается на функционировании иных потребителей.

Технические характеристики
Основные требования, которые обеспечивают качественное функционирование асинхронных агрегатов с фазным ротором, определены и указаны в соответствующих ГОСТах.
Именно они определяют главные технические характеристики и к таким параметрам относятся:
- Габариты и мощность двигателя, которые должны иметь показатели, соответствующие техническому регламенту.
- Уровень защиты должен соответствовать условиям, в которых происходит процесс эксплуатации, поскольку различные виды машин могут быть предназначены для установки на улице или только внутри помещений.
- Высокая степень изоляции, которая должна обладать устойчивостью к повышению рабочей температуры и последующему нагреву.
- Различные виды асинхронных двигателей предназначены для использования в определенных климатических условиях. Это касается в первую очередь установки подобных машин в крайне холодных местностях или, наоборот, жарких областях. Исполнение агрегата должно соответствовать климату местности, в которой проходит процесс эксплуатации.
- Полное соответствие режимам функционирования.
- Наличие системы охлаждения, которая должна соответствовать рабочим режимам машины.
- Уровень шума при запуске агрегата на холостом ходу должен соответствовать второму классу или быть ниже его.

Устройство
Для работы с асинхронными двигателями и полного понимания принципов функционирования подобных машин, необходимо ознакомиться с особенностями их устройства:
- Основными частями конструкции агрегата является статор, находящийся в неподвижном состоянии, и вращающийся ротор, который расположен внутри него.
- Воздушный зазор разделяет оба элемента между собой.
- И статор, и ротор обладают специальной обмоткой.
- Статорная обмотка имеет подключение к питающей электросети с переменным напряжением.
- Роторная обмотка по своей сути является вторичной, поскольку не имеет подключения к сети, а передачу необходимой энергии для нее осуществляет непосредственно статор. Этот процесс происходит благодаря созданию магнитного потока.
- Корпус статора и корпус двигателя – это один элемент, который имеет в своей структуре запрессованный сердечник.
- В пазах сердечника размещены проводники обмотки. Специальный электротехнический лак обеспечивает надежную изоляцию данных объектов друг от друга.
- Обмотка сердечника особым образом разделена на секции, которые соединены в катушки.
- Катушки составляют фазы самого двигателя, к которым происходит подключение фазы от питающей электросети.
- Ротор состоит из вала и сердечника.
- Роторный сердечник создан из набранных пластин, которые изготавливаются из особой разновидности электротехнической стали. На его поверхности имеются симметричные пазы, внутри которых размещены проводники обмотки.
- Роторный вал в ходе работы выполняет функции по передаче крутящего момента непосредственно к приводному механизму машины.
- Роторы обладают собственной классификацией, короткозамкнутая разновидность имеет в своей конструкции стержни, изготовленные из алюминия. Они располагаются внутри сердечника, а на торцах замкнуты специальными кольцами. Подобная система получила название беличьего колеса. В машинах с наиболее высокой мощностью, пазы дополнительно заливаются алюминием, что способствует повышению прочности конструкции.
- Вместо короткозамкнутого ротора в конструкции может присутствовать фазная разновидность. Количество катушек, сдвинутых под определенным углом относительно друг друга, в такой системе зависит от числа парных полюсов. При этом, роторные пары полюсов всегда равны количеству аналогичных пар в статоре. Роторная обмотка соединена особым образом и напоминает по своей форме звезду, а ее лучи выводятся на контакты токосъемных колец, которые соединены при помощи механизма щеточного типа и пускового реостата.


 При этом, роторные пары полюсов всегда равны количеству аналогичных пар в статоре. Роторная обмотка соединена особым образом и напоминает по своей форме звезду, а ее лучи выводятся на контакты токосъемных колец, которые соединены при помощи механизма щеточного типа и пускового реостата.
При этом, роторные пары полюсов всегда равны количеству аналогичных пар в статоре. Роторная обмотка соединена особым образом и напоминает по своей форме звезду, а ее лучи выводятся на контакты токосъемных колец, которые соединены при помощи механизма щеточного типа и пускового реостата.Принцип работы
После освоения устройства асинхронного двигателя с фазным ротором и особенностей его запуска, можно переходить к изучению принципа работы, который заключается в следующем:
- На статор, обладающий тройной обмоткой, начинает подаваться трехфазное напряжение, идущее от внешней электросети с переменным током.
- Последовательно происходит процесс возбуждения магнитного поля, которое начинает совершать вращательные движения.
- Совершаемые вращения постепенно становятся быстрее скорости ротора.
- В определенный момент времени начинает происходить пересечение отдельных линий полей статора и ротора, что обуславливает возникновение электродвижущей силы.
- Электродвижущая сила оказывает прямое воздействие на закороченную обмотку ротора, благодаря чему в ней начинает появляться электрический ток.
- Через определенное время начинает происходить взаимодействие между возникшим в роторе током и статорным магнитным полем, из-за этого образуется крутящий момент, обеспечивающий функционирование асинхронной машины.
Преимущества и недостатки
Востребованность асинхронных двигателей подобного типа на сегодняшний день обуславливается следующими значимыми преимуществами, которыми они обладают:
- Значительные показатели, которых способен достигать начальный вращающий момент после запуска машины.
- Механические перегрузки, которые возникают на протяжении коротких промежутков времени, переносятся агрегатом без каких-либо значимых последствий и не оказывают влияния на процесс функционирования машины.
- При возникновении разнообразных перегрузок в системе, двигатель сохраняет постоянную скорость, возможные отклонения не являются значимыми.
- Показатели пускового тока значительно меньше, чем у большинства асинхронных аналогов, например, имеющих в своей конструкции короткозамкнутый ротор.
- Использование подобных агрегатов предусматривает возможность использования систем, автоматизирующих процесс их запуска и введения в рабочее состояние.
- Конструкция и устройство таких машин являются довольно простыми.
- Запуска агрегата осуществляется по простой схеме, не подразумевающей значимых усилий.
- Относительно невысокая стоимость.
- Обслуживание таких машин не требует значительных затрат сил и времени.

Однако, при таком большом количестве положительных сторон, асинхронные двигатели с фазным ротором обладают и некоторыми недостатками, основными из них являются следующие особенности подобных машин:
- Слишком большие размеры двигателя, которые могут причинять некоторые неудобства при монтаже и эксплуатации.
- Коэффициент полезного действия и общая выработка у них намного ниже, чем у многих аналогов. Разновидность агрегатов с короткозамкнутым ротором значительно превосходит их по этим показателям.
Применение
На сегодняшний день, большая часть двигателей, выпускаемых в промышленных масштабах, относится к асинхронной разновидности.
Благодаря ряду преимуществ, которыми обладают машины с фазными роторами, они широко используются в разных сферах человеческой деятельности, в том числе для поддержания работы:
- Устройств автоматики и приборов из телемеханической области.
- Бытовых приборов.
- Медицинского оборудования.
- Оборудования, предназначенного для осуществления аудиозаписи.
Статья была полезна?
0,00 (оценок: 0)
Электродвигатель АК4 с фазным ротором
Назначение и эксплуатационные характеристики АК4
Электродвигатели переменного тока с фазным ротором серии АК4 предназначены для привода механизмов с тяжелыми условиями пуска и требующих регулирования частоты вращения:— для механизмов, момент которых не зависит от частоты вращения, регулирование частоты вращения допускается в диапазоне (1,0-0,8)nnom
— для механизмов, момент которых изменяется по вентиляторной характеристике, регулирование частоты вращения допускается в диапазоне (1,0-0,5)nnom
Двигатели предназначены для работы от сети переменного тока частотой 50 Гц напряжением 6000 В и 3000 В.
По просьбе заказчика на базе вышеуказанных машин могут быть изготовлены двигатели на другие мощности, напряжения и частоту сети с учетом требования контракта.
Пуск двигателей от полного напряжения сети с включенными в цепь ротора пусковыми сопротивлениями с помощью станции управления.
Соединение двигателей с приводным механизмом осуществляется посредством упругой муфты.
Двигатели имеют подшипники качения с пластичной смазкой.
Изоляционные материалы обмотки статора и ротора класса нагревостойкости «F» с температурным использованием по классу «В». Изоляция обмотки статора термореактивная типа «Монолит2».
Обмотка статора имеет шесть выводных концов, закрепленных на четырех изоляторах в коробке выводов.
Соединение фаз обмоток звезда.
Двигатели допускают правое и левое направление вращения. Изменение направления вращения
осуществляется только из состояния покоя.
Структура условного обозначения:АК4-HL-XK
АК— асинхронный двигатель с фазным ротором;
4— номер серии;
H(400, 450) — высота оси вращения в мм;
L(Х,У.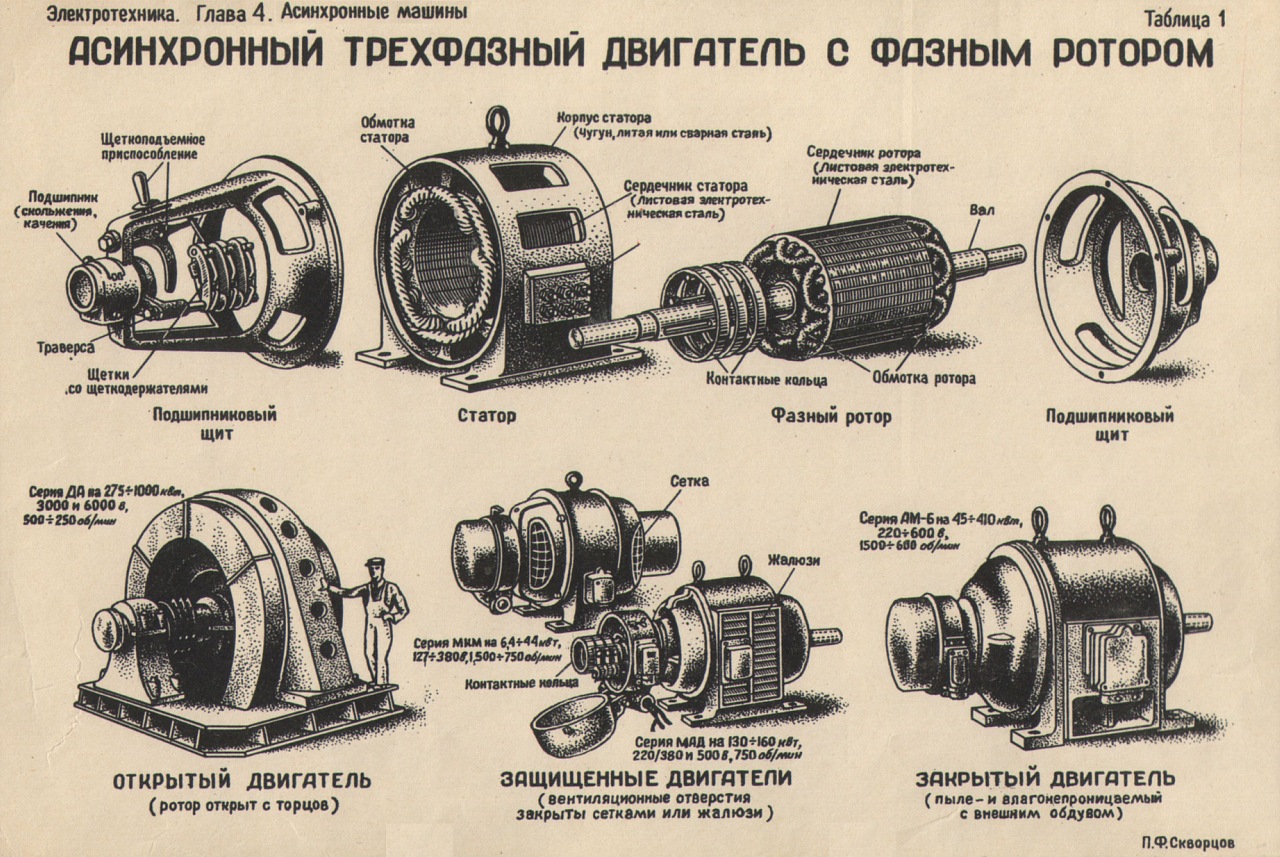 ХК,УК) — условная длина двигателя;
ХК,УК) — условная длина двигателя;
X(4,6,8,10,12) — число полюсов;
K(У3, Т3) — климатическое исполнение и категория размещения.
Характеристики и особенности:
АО «Электромаш» первое и базовое предприятие, освоившее двигатели АК4 как часть единой, унифицированной серии А4, ДАЗО с короткозамкнутым ротором и АК4 с фазным ротором;
Выпускаются взамен поставлявшихся ранее электродвигателей серии АК, АКЗ 12 и 13 габарита и могут быть поставлены на замену комплектно с переходной плитой или балками для установки без переделки фундамента;
Имеют оптимальное соотношение энергетических показателей и удельной материалоемкости;
Усиленная обшивка по сравнению с аналогами;
Полная унификация по статорам с электродвигателями А4 и ДАЗО4;
Возможна поставка в исполнении, позволяющем обеспечить подключение принудительной вентиляции;
Обеспечиваемая комплектная поставка с пусковой аппаратурой типа УПРФ, пускорегулирующей по типу ТПРС и по типу тиристорного коммутатора ТТРЕ, ТТРП.
Таблица 1. Основные технические характеристики двигателей АК4
| Тип двигателя |
Мощность, кВт |
Частота вращения, об/мин |
КПД, % |
Коэффициент мощности |
Масса, кг |
| АК4-400XK-4У3 | 400 | 1500 | 93,5 | 0,88 | 2100 |
| АК4-400X-4У3 | 500 | 1500 | 94,0 | 0,87 | 2250 |
| АК4-400Y-4У3 | 630 | 1500 | 94,7 | 0,89 | 2480 |
| АК4-450X-4У3 | 800 | 1500 | 94,7 | 0,89 | 2800 |
| АК4-450Y-4У3 | 1000 | 1500 | 95,2 | 0,90 | 3120 |
| АК4-400XK-6У3 | 315 | 1000 | 92,9 | 0,85 | 2140 |
| АК4-400X-6У3 | 400 | 1000 | 93,3 | 0,86 | 2300 |
| АК4-400Y-6У3 | 500 | 1000 | 93,6 | 0,87 | 2500 |
| АК4-450X-6У3 | 630 | 1000 | 94,0 | 0,87 | 2850 |
| АК4-450Y-6У3 | 800 | 1000 | 94,4 | 0,87 | 3170 |
| АК4-400X-8У3 | 250 | 750 | 92,5 | 0,82 | 2240 |
| АК4-400Y-8У3 | 315 | 750 | 92,8 | 0,83 | 2450 |
| АК4-450YK8У3 | 500 | 750 | 93,6 | 0,84 | 2990 |
| АК4-450X-8У3 | 400 | 750 | 93,2 | 0,83 | 2750 |
| АК4-450Y-8У3 | 630 | 750 | 94,0 | 0,84 | 3280 |
| АК4-400X-10У3 | 200 | 600 | 91,1 | 0,78 | 2210 |
| АК4-400Y-10У3 | 250 | 600 | 91,9 | 0,79 | 2410 |
| АК4-450X-10У3 | 315 | 600 | 92,3 | 0,83 | 2650 |
| АК4-450Y-10У3 | 400 | 600 | 92,6 | 0,83 | 2890 |
| АК4-450X-12У3 | 250 | 500 | 91,3 | 0,77 | 2740 |
| АК4-450Y-12У3 | 315 | 500 | 92,1 | 0,77 | 2970 |
| АК4-400X-4Т3 6/6,6 кВ | 400 | 1500 | 93,4/93,7 | 0,89/0,88 | 2250 |
| АК4-400Y-4Т3 6/6,6 кВ | 500 | 1500 | 93,8/94,0 | 0,89/0,88 | 2480 |
| АК4-450X-4Т3 6/6,6 кВ | 630 | 1500 | 94,3/94,3 | 0,89/0,89 | 2800 |
| АК4-450Y-4Т3 6/6,6 кВ | 800 | 1500 | 94,5/94,6 | 0,90/0,89 | 3120 |
| АК4-400XK-6Т3 6/6,6 кВ | 250 | 1000 | 92,8/93,0 | 0,85/0,83 | 2140 |
| АК4-400X-6Т3 6/6,6 кВ | 315 | 1000 | 93,0/93,3 | 0,86/0,85 | 2300 |
| АК4-400Y-6Т3 6/6,6 кВ | 400 | 1000 | 93,5/93,8 | 0,85/0,85 | 2850 |
| АК4-450X-6Т3 6/6,6 кВ | 500 | 1000 | 93,6/93,8 | 0,87/0,86 | 3170 |
| АК4-450Y-6Т3 6/6,6 кВ | 630 | 1000 | 94,2/94,4 | 0,88/0,87 | 2240 |
| АК4-400X-8Т3 | 200 | 750 | 92,4 | 0,80 | 2450 |
| АК4-400Y-8Т3 6/6,6 кВ | 250 | 750 | 93,0/93,2 | 0,81/0,80 | 2850 |
| АК4-450X-8Т3 6/6,6 кВ | 315 | 750 | 93,0/93,1 | 0,84/0,82 | 2990 |
| АК4-450YK-8Т3 6/6,6 кВ | 400 | 750 | 93,2/93,4 | 0,85/0,83 | 3280 |
| АК4-450Y-8Т3 6/6,6 кВ | 500 | 750 | 93,9/94,0 | 0,85/0,82 | 2410 |
| АК4-400Y-10Т3 6/6,6 кВ | 200 | 600 | 91,6/91,6 | 0,77/0,77 | 2650 |
| АК4-450X-10Т3 6/6,6 кВ | 250 | 600 | 92,0/92,4 | 0,83/0,81 | 2890 |
| АК4-450X-12Т3 | 200 | 500 | 91,3 | 0,72 | 2740 |
| АК4-450Y-12Т3 6/6,6 кВ | 250 | 500 | 91,6/91,6 | 0,77/0,73 | 2970 |
Конструкция асинхронных двигателей с фазным ротором
Конструкция асинхронной машины с контактными кольцами представлена на рис. Двигатели этого типа отличаются от короткозамкнутых только устройством ротора.
Двигатели этого типа отличаются от короткозамкнутых только устройством ротора.
Статор двигателя может иметь те же разновидности конструктивных исполнений, что и в короткозамкнутом двигателе. Статор двигателя по рис. 6 (с радиальными каналами в магнитопроводе) почти не отличается по конструкции от статора на рис. 3. Статор состоит из станины 7, в которой при помощи нажимных шайб 5 и шпонок 7 укреплены пакеты магнитопровода, набранные из кольцевых пластин 2. Для образования каналов между пакетами служат распорки 4. В пазы магнитопровода статора уложена двухслойная обмотка, катушки 30 которой связаны между собой соединениями 8. Выводные концы обмотки статора сосредоточены в выводной коробке 23. К фундаменту станина крепится лапами 22. Для подъема двигателя при монтаже служат рымы 6.
Асинхронный двигатель с фазным ротором (250 кВт, 3000 об/мин, 50 Гц, защищенный продуваемый)
Ротор двигателя состоит из вала 26, на котором при помощи нажимных колец 24, шпонки 21 и разрезной шпонки 20 укреплены в запрессованном состоянии пакеты магнитопровода, набранные из кольцевых пластин 3 (см. рис. 2, а). Радиальные вентиляционные каналы между пакетами образуются дистанционными распорками, помещенными на каждом зубцовом делении. В полузакрытых пазах магнитопровода ротора, показанных в разрезе на рис. 4, б, размещается трехфазная двухслойная волновая стержневая обмотка 29, соединенная обычно в звезду, выводные концы которой посредством электрических кабелей 19, проведенных через отверстие в валу, присоединены к контактным кольцам 75.
рис. 2, а). Радиальные вентиляционные каналы между пакетами образуются дистанционными распорками, помещенными на каждом зубцовом делении. В полузакрытых пазах магнитопровода ротора, показанных в разрезе на рис. 4, б, размещается трехфазная двухслойная волновая стержневая обмотка 29, соединенная обычно в звезду, выводные концы которой посредством электрических кабелей 19, проведенных через отверстие в валу, присоединены к контактным кольцам 75.
Стержни 1 обмотки с заранее наложенной витковой изоляцией 2, 3 (см. рис. 4, б) вставляются в пазы с торцевой стороны магнитопровода. Предварительно в пазы вводится пазовая коробочка 4, играющая роль корпусной изоляции. Для укрепления стержней в радиальном направлении и усиления витковой и корпусной изоляции используются изоляционные прокладки 5—6. Центробежная сила, действующая на пазовую часть обмотки, воспринимается клиньями 7 из изоляционного материала.
Лобовые части обмоток укладываются на нажимные шайбы 24 (рис. 6), которые одновременно выполняют роль обмоткодержателей, и охватываются снаружи кольцевыми бандажами 32, рассчитанными на восприятие центробежной силы.
Электрическое соединение вращающейся обмотки ротора с внешними (неподвижными) электрическими цепями производится при помощи контактных колец, на которые выведены обмотки, и щеточного устройства, связанного с неподвижными электрическими цепями. Контактные кольца выполняются как отдельный узел машины. Кольца 75, изготовленные из стали, отделяются друг от друга и от корпуса с помощью изоляционных прокладок 7 7. Все эти детали стягиваются вместе изолированными шпильками 16 и прифланцовываются к торцу вала. К кольцам плотно прижимаются щетки, электрически соединенные с токоподводящими шинами 72 щеточной траверсы (кроме этих шин на рис. 6 показаны болты 77 щеточной траверсы и ее изоляционные детали, а также корпус 73 и крышка 14; щетки и щеткодержатели не показаны).
Необходимый электрический контакт щеток с кольцами обеспечивается при помощи щеткодержателей, укрепленных на шинах 72. Соединение токоподводящих шин 72 щеточной траверсы с пусковым реостатом производится в выводной коробке контактных колец 18.
Правильное расположение оси ротора по отношению к статору и возможность вращения ротора обеспечиваются с помощью таких же деталей, как в короткозамкнутом двигателе по рис. (подшипников качения, роликового 25 и шарикового /0, подшипниковых крышек 27 и подшипниковых щитов 31).
По способу охлаждения и защиты от воздействия внешней среды двигатель по рис. 6 имеет продуваемое каплезащищенное исполнение. Внутри машины воздух перемещается аксиально-радиально. Наружный воздух поступает в машину с двух сторон через отверстия в подшипниковых щитах 31 и направляется диффузорами 9 к вентиляционным лопастям 28, промежуткам между лобовыми частями стержней обмотки ротора и к аксиальным каналам в магнитопроводе ротора; далее воздух из аксиальных каналов попадает в радиальные каналы в магнитопроводе ротора и статора; воздух от вентиляционных лопастей 28 и лобовых частей ротора омывает лобовые части обмотки статора. Нагретый в машине воздух попадает в пространство между ярмом статора и корпусом станины, откуда он выбрасывается наружу через боковые отверстия в корпусе. Необходимый для циркуляции воздуха напор создается радиальными каналами в роторе, которые играют роль центробежных вентиляторов.
Необходимый для циркуляции воздуха напор создается радиальными каналами в роторе, которые играют роль центробежных вентиляторов.
Асинхронный электродвигатель с фазным ротором
Электродвигатели серии АК
Электродвигатели серий АК, АКЗ 12 и 13 габаритов
Электродвигатели серии АК 12 И 13 габаритов
Электродвигатели серии АКЗ 12 И 13 габаритов
Электродвигатели серии АКБ 12 и 13 габаритов
Электродвигатели серии АКН-4
Электродвигатели серии АКН-2
Электродвигатели серии АКНЗ-2
Электродвигатели ряда АКН3-4
Электродвигатели серий АКД-15, 16, 17 габаритов; АКДЗ-15, 16, 17 габаритов
Электродвигатели серии АКЗ0-15-16 и 17 габаритов
Электродвигатели АКДЭ
Электродвигатели серии АТ20С8-12УХЛ4, АТ20С8-12Т3, АТ20С12-12УХЛ4 и АТ20С12-12Т3
Электродвигатели типа АКС
Электродвигатели типа АОК-250-6-500У1
Электродвигатели взрывозащищенного исполнения серии «Украина»
Электродвигатели взрывозащищенного исполнения серии 2МА36 6, 7 габаритов
Асинхронный двигатель с фазным ротором от завода изготовителя nkemz. com характеризуются наилучшими регулируемыми пусковыми качествами. Этот электродвигатель, благодаря своим характеристикам, нашел свое применение в различных сферах промышленности.
com характеризуются наилучшими регулируемыми пусковыми качествами. Этот электродвигатель, благодаря своим характеристикам, нашел свое применение в различных сферах промышленности.
Сегодня, наиболее востребованными моделями из всех электродвигателей, выпускаемых заводами, считаются асинхронные двигатели. К этим «более желаемым» моделям относится и трехфазный асинхронный двигатель с фазным ротором. Широкое распространение таких аппаратов можно объяснить простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, небольшой стоимостью и простотой в обслуживании.
Типы и характеристика оборудования
Предприятие nkemz.com выпускает четыре типа электродвигателей: одно- и двухфазный асинхронный электродвигатель с короткозамкнутым фазным ротором; трехфазный асинхронный двигатель с короткозамкнутым ротором и фазным ротором.
Фазный ротор асинхронного двигателя характеризуются следующими особенностями, которые выгодно его отличают от двигателя с короткозамкнутым ротором:
- начальный вращающий момент достаточно большой;
- возможностью кратковременной механической перегрузки двигателя;
- при возможных перегрузках агрегата скорость практически не изменяется;
- небольшой пусковой ток.
Завод изготовитель nkemz.com также производит крановые электродвигатели с фазным ротором. Эти агрегаты способны привести в действие механизм крана. Крановый двигатель с фазным ротором обладатель высокого стартового крутящего момента и низкого пускового тока.
Каталог асинхронных двигателей богат и разнообразен, т.к. они отличаются не только по своим характеристикам, но и по назначению. По условиям работы, компания nkemz.com выпускает асинхронные двигатели в следующих вариациях:
- открытого,
- защищенного,
- закрытого
- и взрывоопасного исполнения.
Цена оборудования рассчитывается индивидуально, в зависимости от модификации электродвигателя, от допустимых условий эксплуатации, от размещения техники. Аппараты снабжаются техническими паспортами, в которых указаны их основные характеристики. Сотрудники nkemz.com проконсультируют по всем моделям электродвигателей и помогут выбрать максимально подходящий агрегат, который покажет всю свою мощь при заданных условиях. Купить электродвигатель у завода изготовителя, ‒ значит гарантировать себе надежную бесперебойную работу.
Купить электродвигатель у завода изготовителя, ‒ значит гарантировать себе надежную бесперебойную работу.
Мотор с обмоткой ротора: что это такое?
Двигатель с фазным ротором — это разновидность трехфазного асинхронного двигателя, предназначенная для обеспечения высокого пускового момента для нагрузок с высокой инерцией при очень низком токе.
Двигатели с фазным ротором также называют двигателями с фазным ротором.
Статор двигателя с фазным ротором такой же, как у обычного асинхронного двигателя, но ротор имеет трехфазную обмотку, причем каждый из выводов обмотки подключен к отдельным контактным кольцам.Напротив, традиционный асинхронный двигатель (он же «двигатель с короткозамкнутым ротором») имеет обмотки, которые постоянно закорочены концевым кольцом.
Контактные кольца двигателя с фазным ротором содержат щетки, которые образуют внешнюю вторичную цепь, в которую может быть добавлено полное сопротивление (сопротивление). Во время пуска это сопротивление включается последовательно с обмотками ротора. Это добавленное сопротивление заставляет ток ротора идти по фазе с током статора, что увеличивает развиваемый крутящий момент.Но добавленное сопротивление также уменьшает ток во вторичной цепи, поэтому очень высокий пусковой момент может быть получен с низким пусковым током .
Во время пуска это сопротивление включается последовательно с обмотками ротора. Это добавленное сопротивление заставляет ток ротора идти по фазе с током статора, что увеличивает развиваемый крутящий момент.Но добавленное сопротивление также уменьшает ток во вторичной цепи, поэтому очень высокий пусковой момент может быть получен с низким пусковым током .
Изображение предоставлено: TMEIC
Традиционным асинхронным двигателям с короткозамкнутым ротором при запуске может потребоваться от 400 до более 1000 процентов тока полной нагрузки.
Если полное сопротивление вводится во вторичную цепь при работающем двигателе, ток ротора уменьшается, а скорость двигателя уменьшается.Но по мере уменьшения скорости двигателя в обмотках ротора индуцируется большее напряжение, и вырабатывается больше тока для создания необходимого крутящего момента при этой пониженной скорости.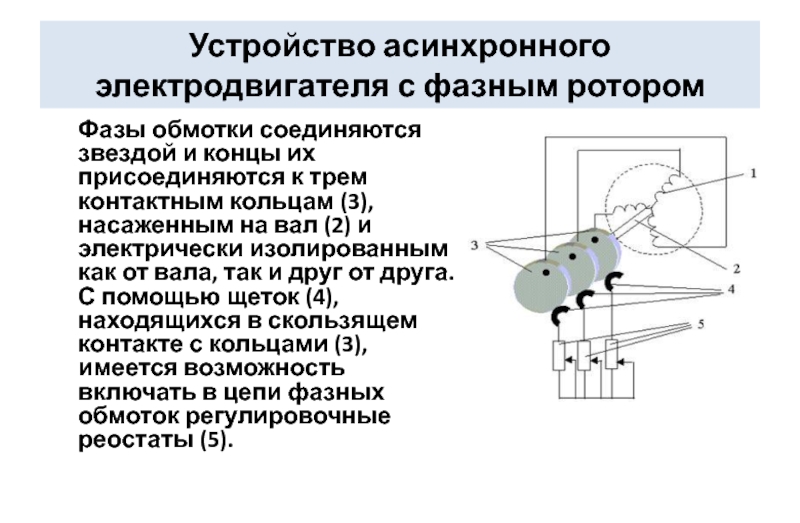
Постепенно уменьшая сопротивление , позволяет двигателю набрать нормальную рабочую скорость, обеспечивая плавное ускорение нагрузки. Поддерживая некоторое сопротивление во вторичной цепи, можно до определенного предела контролировать скорость. Но этот метод регулирования скорости теряет свою эффективность по мере увеличения скорости — примерно до 50 процентов номинальной скорости при полной нагрузке.Когда сопротивление во вторичной цепи полностью закорочено, двигатель электрически ведет себя как традиционный двигатель с короткозамкнутым ротором.
Контактные кольца образуют вторичный внешний контур. Добавление сопротивления в эту цепь изменяет кривую крутящего момента двигателя. Недостатками двигателей с фазным ротором являются сложность и необходимость технического обслуживания контактных колец и щеток по сравнению с традиционными двигателями с короткозамкнутым ротором. Однако двигатели с фазным ротором полезны в приложениях с высокими инерционными нагрузками, таких как большие вентиляторы, насосы и мельницы, поскольку конструкция с фазным ротором позволяет постепенно увеличивать нагрузку за счет управления скоростью и крутящим моментом. И они могут развивать очень высокий пусковой крутящий момент в состоянии покоя с низким пусковым током. Хотя в настоящее время преобладают традиционные асинхронные двигатели с приводами с регулируемой скоростью, двигатели с фазным ротором также могут использоваться для приложений с регулируемой скоростью, если не требуется очень точное управление скоростью.
И они могут развивать очень высокий пусковой крутящий момент в состоянии покоя с низким пусковым током. Хотя в настоящее время преобладают традиционные асинхронные двигатели с приводами с регулируемой скоростью, двигатели с фазным ротором также могут использоваться для приложений с регулируемой скоростью, если не требуется очень точное управление скоростью.
Изображение предоставлено: TECO-Westinghouse Motors, Inc.
Трехфазный асинхронный двигатель с фазным ротором
ЗАДАЧИ
• перечислить основные компоненты многофазного асинхронного двигателя с фазным ротором.
• Опишите, как развивается синхронная скорость в этом типе двигателя.
• Опишите, как регулятор скорости подключен к щеткам двигателя. обеспечивает регулируемый диапазон скорости двигателя.
• указать, как крутящий момент, регулирование скорости и эффективность работы
на двигатель влияет регулятор скорости.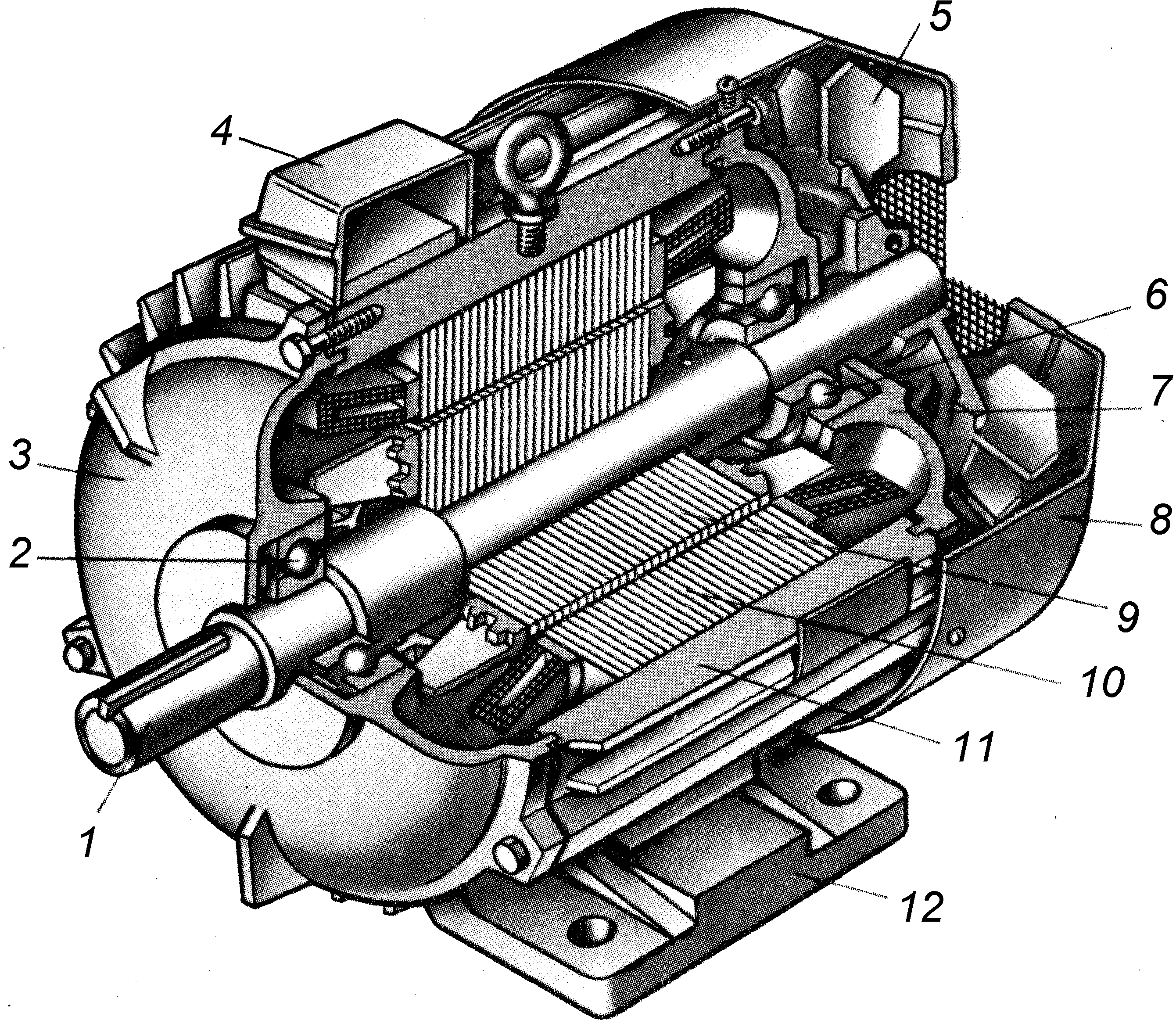
• продемонстрировать, как изменить направление вращения ротора с фазой Индукционный двигатель.
До последних нескольких лет регулирование скорости переменного тока было очень трудным. со штатным мотором.Поэтому другой тип мотора и управления Система разрабатывалась и широко использовалась в течение многих лет. Электрики по обслуживанию должен быть знаком с этим типом двигателя и системы управления.
Для многих промышленных двигателей требуются трехфазные двигатели с регулируемой контроль скорости. Асинхронный двигатель с короткозамкнутым ротором нельзя использовать для переменного скорость работы, поскольку ее скорость по существу постоянна. Другой тип индукции Двигатель был разработан для приложений с регулируемой скоростью.Этот мотор называется асинхронный двигатель с фазным ротором или электродвигатель переменного тока с фазным ротором.
КОНСТРУКТИВНЫЕ ДЕТАЛИ
Трехфазный асинхронный двигатель с фазным ротором состоит из сердечника статора с
трехфазная обмотка, намотанный ротор с контактными кольцами, щетками и щеткой
держатели и два торцевых щита для размещения подшипников, поддерживающих ротор
вал.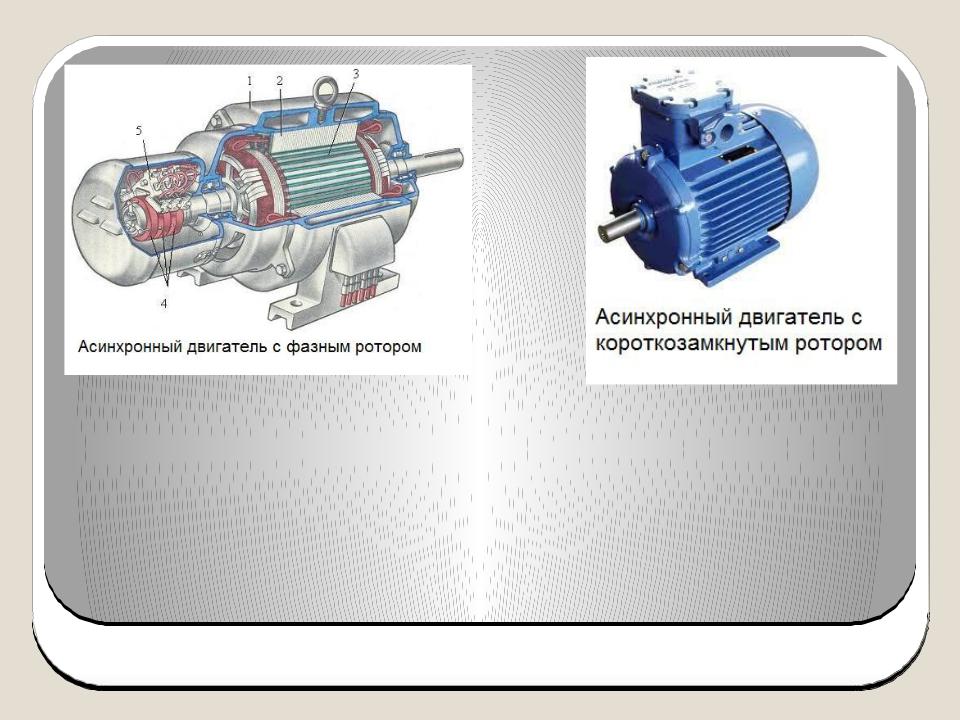
рис. 1, 2, 3 и 4 показывают основные части трехфазного, Асинхронный двигатель с фазным ротором.
ил. 1 Детали двигателя с фазным ротором
ил. 2 Статор с обмоткой для многофазного асинхронного двигателя
ил. 3 Ротор с обмоткой для многофазного асинхронного двигателя
ил. 4 Подшипник скольжения, многофазный асинхронный двигатель с фазным ротором (General Electric Company)
Статор
Типичный статор содержит трехфазную обмотку, удерживаемую в пазах.
многослойного стального сердечника, рисунок 2.Обмотка состоит из формованных
катушки расположены и соединены таким образом, что получается три однофазных обмотки
разнесены на 120 электрических градусов. Отдельные однофазные обмотки
подключаются по схеме звезды или треугольника. Выводятся три линейных вывода
к клеммной коробке, установленной на раме двигателя. Это та же конструкция
как статор двигателя с короткозамкнутым ротором.
Ротор
Ротор состоит из цилиндрического сердечника, состоящего из стальных пластин.Прорези, вырезанные в цилиндрическом сердечнике, удерживают сформированные катушки проволоки для обмотка ротора.
Обмотка ротора состоит из трех однофазных обмоток, разнесенных на 120 эл. градусы друг от друга. Однофазные обмотки соединяются звездой или звездой. дельта. (Обмотка ротора должна иметь такое же количество полюсов, что и статор обмотки.) Три вывода от трехфазной обмотки ротора заканчиваются на трех контактных кольцах, установленных на валу ротора. Выводы от угольных щеток которые ездят на этих контактных кольцах, подключены к внешнему регулятору скорости для изменения сопротивления ротора для регулирования скорости.
Щетки надежно прикреплены к контактным кольцам намотанного ротора с помощью
регулируемые пружины, установленные в щеткодержателях. Щеткодержатели бывают
фиксируется в одном положении. Для этого типа двигателя нет необходимости переключать
положение щеток, которое иногда требуется при работе с генератором постоянного тока и электродвигателем.
Для этого типа двигателя нет необходимости переключать
положение щеток, которое иногда требуется при работе с генератором постоянного тока и электродвигателем.
Рама двигателя
Корпус двигателя изготовлен из литой стали. Сердечник статора прижимается напрямую в кадр.К стальной литой раме прикручены два торцевых щита. Один одного из торцевых щитов больше другого, потому что он должен вмещать щетку держатели и щетки, которые скользят по контактным кольцам намотанного ротора. В кроме того, он часто содержит съемные смотровые лючки.
Подшипниковая опора такая же, как и в индукционной короткозамкнутой клетке. моторы. В конце используются либо подшипники скольжения, либо шарикоподшипники. щиты.
ПРИНЦИП ДЕЙСТВИЯ
Когда три тока, разнесенные на 120 электрических градусов, проходят через три
однофазные обмотки в пазах сердечника статора, вращающийся магнитный
месторождение разрабатывается. Это поле движется вокруг статора. Скорость
вращающееся поле зависит от количества полюсов статора и частоты
источника питания. Эта скорость называется синхронной скоростью. это
определяется по формуле, которая использовалась для нахождения синхронного
скорость вращающегося поля асинхронных двигателей с короткозамкнутым ротором.
Это поле движется вокруг статора. Скорость
вращающееся поле зависит от количества полюсов статора и частоты
источника питания. Эта скорость называется синхронной скоростью. это
определяется по формуле, которая использовалась для нахождения синхронного
скорость вращающегося поля асинхронных двигателей с короткозамкнутым ротором.
Синхронная скорость в об / мин = [120 x частота в герцах / количество полюсов] или S = 120 x F / P
S = 120 x f / P
Поскольку вращающееся поле движется с синхронной скоростью, оно отсекает трехфазное
обмотка ротора и индуцирует в этой обмотке напряжение.Обмотка ротора
соединяется с тремя контактными кольцами, установленными на валу ротора. Кисти
скользящие кольца соединяются с внешней группой соединенных звездой
резисторы (регулятор скорости), рисунок 5. Наведенные напряжения в
обмотки ротора создают токи, которые идут от ротора по замкнутому пути
обмотка на регулятор скорости, соединенный звездой. Токи ротора создают
магнитное поле в сердечнике ротора, основанное на действии трансформатора. Этот ротор
поле реагирует с полем статора, создавая крутящий момент, который вызывает
ротор повернуть.Регулятор скорости иногда называют вторичным сопротивлением.
контроль.
Токи ротора создают
магнитное поле в сердечнике ротора, основанное на действии трансформатора. Этот ротор
поле реагирует с полем статора, создавая крутящий момент, который вызывает
ротор повернуть.Регулятор скорости иногда называют вторичным сопротивлением.
контроль.
Пусковая теория асинхронных двигателей с фазным ротором
Для запуска двигателя все сопротивление регулятора скорости, соединенного звездой.
вставлен в цепь ротора. Цепь статора запитана от
трехфазная линия. Наведенное в роторе напряжение вызывает токи
в контуре ротора. Однако токи ротора ограничены по величине.
сопротивлением регулятора скорости.В результате ток статора
также имеет ограниченную стоимость. Другими словами, чтобы минимизировать пусковой выброс
тока к асинхронному двигателю с ротором, вставьте полное сопротивление
регулятора скорости в цепи ротора. На пусковой крутящий момент влияет
сопротивлением, введенным во вторичную обмотку ротора. С сопротивлением в
вторичный, коэффициент мощности ротора высокий или близок к единице. Этот
означает, что ток ротора почти совпадает по фазе с индуцированным ротором
Напряжение.Если ток ротора находится в фазе с напряжением, индуцированным ротором,
тогда магнитные полюса ротора производятся одновременно с
полюса статора. Это создает сильный магнитный эффект, который создает сильный
пусковой момент. По мере ускорения двигателя ступеньки сопротивления в соединении звездой
регулятор скорости может быть отключен от цепи ротора до тех пор, пока двигатель не разгонится
к его номинальной скорости.
С сопротивлением в
вторичный, коэффициент мощности ротора высокий или близок к единице. Этот
означает, что ток ротора почти совпадает по фазе с индуцированным ротором
Напряжение.Если ток ротора находится в фазе с напряжением, индуцированным ротором,
тогда магнитные полюса ротора производятся одновременно с
полюса статора. Это создает сильный магнитный эффект, который создает сильный
пусковой момент. По мере ускорения двигателя ступеньки сопротивления в соединении звездой
регулятор скорости может быть отключен от цепи ротора до тех пор, пока двигатель не разгонится
к его номинальной скорости.
ил. 5 Соединения для асинхронного двигателя с фазным ротором и регулятора скорости
Контроль скорости
Добавление сопротивления в цепь ротора не только ограничивает запуск
скачок тока, но также производит высокий пусковой момент и обеспечивает
средство регулировки скорости.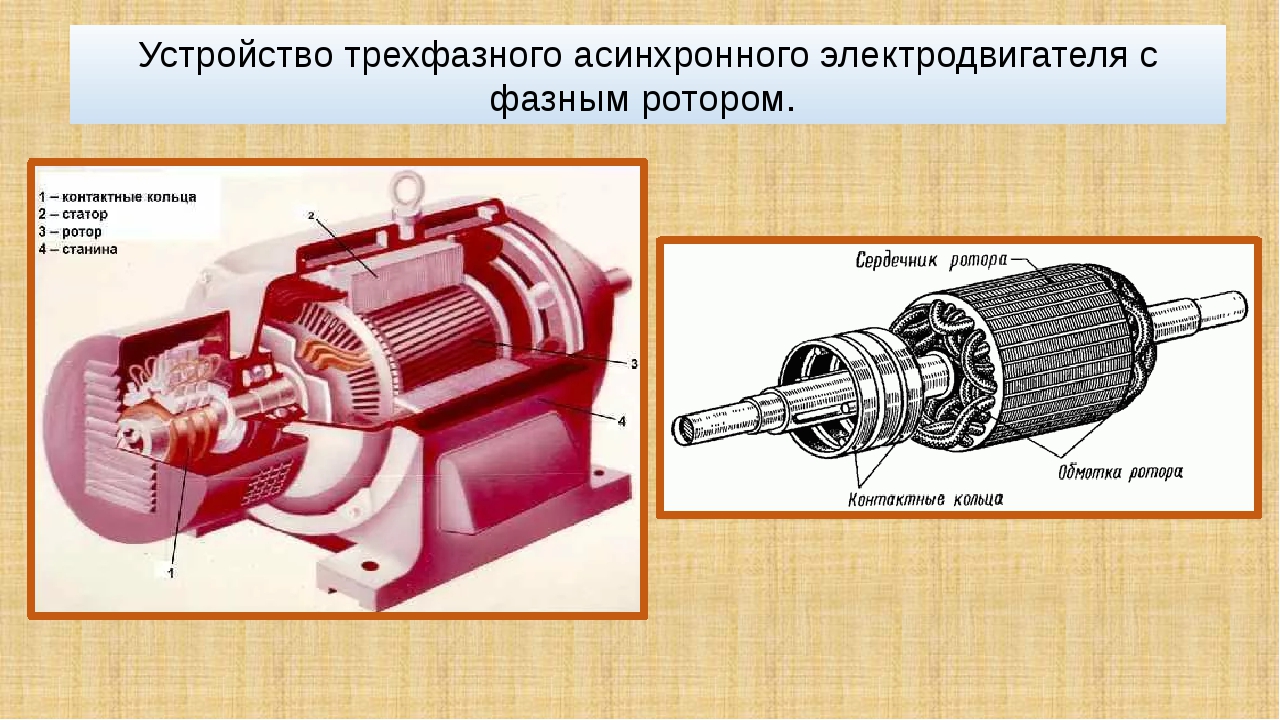 Если полное сопротивление регулятора скорости
вставляется в цепь ротора, когда двигатель работает, ротор
ток уменьшается, и двигатель замедляется. По мере уменьшения скорости ротора
в обмотках ротора индуцируется большее напряжение и увеличивается ток ротора.
разработан для создания необходимого крутящего момента на пониженной скорости.
Если полное сопротивление регулятора скорости
вставляется в цепь ротора, когда двигатель работает, ротор
ток уменьшается, и двигатель замедляется. По мере уменьшения скорости ротора
в обмотках ротора индуцируется большее напряжение и увеличивается ток ротора.
разработан для создания необходимого крутящего момента на пониженной скорости.
Если в цепи ротора убрать все сопротивление, ток и скорость двигателя увеличатся. Однако скорость ротора всегда будет быть меньше синхронной скорости поля, создаваемого статором обмотки.Напомним, что этот факт справедлив и для индукции с короткой клеткой. мотор. Скорость двигателя с фазным ротором можно регулировать вручную или автоматически. с реле времени, контакторами и кнопкой выбора скорости.
ил. 6 Рабочие характеристики двигателя с фазным ротором.
Характеристики крутящего момента
Когда к двигателю прилагается нагрузка, увеличивается как процентное скольжение ротора, так и крутящий момент, развиваемый в роторе. Как показано на графике в
На рисунке 6 соотношение между крутящим моментом и процентом скольжения практически
прямая линия.
Как показано на графике в
На рисунке 6 соотношение между крутящим моментом и процентом скольжения практически
прямая линия.
илл. 6 иллюстрирует, что характеристики крутящего момента индукции с фазным ротором двигатель исправен, когда вставлено полное сопротивление регулятора скорости в контуре ротора. Большое сопротивление в цепи ротора заставляет ток ротора почти совпадать по фазе с индуцированным напряжением ротора. В результате поле, создаваемое током ротора, почти в фазе с полем статора. Если два поля достигают максимального значения в то же время произойдет сильная магнитная реакция, приводящая к с высоким выходным крутящим моментом.
Однако, если все сопротивление регулятора скорости убрать с
цепь ротора и двигатель запускается, характеристики крутящего момента плохие.
Цепь ротора за вычетом сопротивления регулятора скорости состоит в основном из
индуктивного реактивного сопротивления.![]() Это означает, что ток ротора отстает от
индуцированное напряжение ротора и, следовательно, ток ротора отстает от
ток статора. В результате поле ротора, создаваемое током ротора.
отстает от поля статора, которое создается током статора.В
результирующая магнитная реакция двух полей относительно мала, так как
они достигают своих максимальных значений в разных точках. Таким образом,
Выходной пусковой момент асинхронного двигателя с фазным ротором плохой, когда
все сопротивление снимается с цепи ротора.
Это означает, что ток ротора отстает от
индуцированное напряжение ротора и, следовательно, ток ротора отстает от
ток статора. В результате поле ротора, создаваемое током ротора.
отстает от поля статора, которое создается током статора.В
результирующая магнитная реакция двух полей относительно мала, так как
они достигают своих максимальных значений в разных точках. Таким образом,
Выходной пусковой момент асинхронного двигателя с фазным ротором плохой, когда
все сопротивление снимается с цепи ротора.
Регулировка скорости
В предыдущих абзацах было показано, что вставка сопротивления
на регуляторе скорости улучшает пусковой момент двигателя с фазным ротором
на малых оборотах.Однако на обычных скоростях наблюдается обратный эффект. В
Другими словами, регулирование скорости двигателя хуже, когда сопротивление
добавляется в цепь ротора на более высокой скорости. По этой причине сопротивление
регулятора скорости снимается, когда двигатель достигает своей номинальной скорости.
илл. 7 показывает скоростные характеристики асинхронного двигателя с фазным ротором. Обратите внимание, что кривая характеристики скорости, полученная, когда все сопротивление Вырезание из регулятора скорости указывает на относительно хорошее регулирование скорости.Вторая кривая скоростной характеристики, возникающая, когда все сопротивление вставлен в регулятор скорости, имеет заметное падение скорости, поскольку нагрузка увеличивается. Это указывает на плохую регулировку скорости.
Коэффициент мощности
Коэффициент мощности асинхронного двигателя с фазным ротором на холостом ходу столь же низкий. от 15 до 20 процентов. Однако, когда к двигателю приложена нагрузка, коэффициент мощности улучшается и увеличивается до 85-90%, отставание при номинальной нагрузке.
ill 8 — график коэффициента мощности ротора с фазной фазой.
асинхронный двигатель от холостого хода до полной нагрузки. Низкое отставание
коэффициент мощности на холостом ходу обусловлен тем, что намагничивающая составляющая
тока нагрузки составляет такую большую часть общего тока двигателя. Намагничивание
составляющая тока нагрузки намагничивает железо, вызывая взаимодействие между
ротор и статор за счет взаимной индуктивности.
Низкое отставание
коэффициент мощности на холостом ходу обусловлен тем, что намагничивающая составляющая
тока нагрузки составляет такую большую часть общего тока двигателя. Намагничивание
составляющая тока нагрузки намагничивает железо, вызывая взаимодействие между
ротор и статор за счет взаимной индуктивности.
По мере увеличения механической нагрузки на двигатель синфазная составляющая тока увеличивается для обеспечения повышенных требований к мощности.Намагничивание Однако составляющая тока остается прежней. Поскольку общий мотор ток теперь более близок к фазе с линейным напряжением, есть улучшение коэффициента мощности.
ил. 7 Кривые частотных характеристик двигателя с фазным ротором
Операционная эффективность
Асинхронный двигатель с фазным ротором и отключенным всем сопротивлением.
регулятора скорости и асинхронного двигателя с короткозамкнутым ротором показывают почти
такой же КПД. Однако, когда двигатель должен работать при
низкие скорости с отключением всего сопротивления в цепи ротора, эффективность
двигателя плохая из-за потерь мощности в ваттах на резисторах
регулятора скорости.
Однако, когда двигатель должен работать при
низкие скорости с отключением всего сопротивления в цепи ротора, эффективность
двигателя плохая из-за потерь мощности в ваттах на резисторах
регулятора скорости.
илл. 9 иллюстрирует эффективность индукции с фазным ротором. мотор. Верхняя кривая показывает самые высокие результаты операционной эффективности. когда регулятор скорости находится в быстром положении и нет сопротивления вставлен в цепь ротора.Нижняя кривая показывает более низкую рабочую эффективность. Это происходит, когда регулятор скорости находится в медленном положении и все сопротивление регулятора вставлено в цепь ротора.
ил. 8 Коэффициент мощности асинхронного двигателя с фазным ротором
ил. 9 Кривые КПД асинхронного двигателя с фазным ротором
Реверс вращения
Направление вращения асинхронного двигателя с фазным ротором изменено на обратное. поменяв местами соединения любых двух из трех проводов, рис.
10.Эта процедура идентична процедуре, используемой для реверсирования
направление вращения асинхронного двигателя с короткозамкнутым ротором.
поменяв местами соединения любых двух из трех проводов, рис.
10.Эта процедура идентична процедуре, используемой для реверсирования
направление вращения асинхронного двигателя с короткозамкнутым ротором.
ил. 10 Изменения, необходимые для реверсирования направления вращения
электродвигателя с фазным ротором
Электрик ни в коем случае не должен пытаться изменить направление вращения. асинхронного двигателя с фазным ротором путем переключения любого из выводов, питающих от контактных колец к регулятору скорости. Изменения в этих связях не изменяет направление вращения двигателя.
РЕЗЮМЕ
Двигатель с фазным ротором сегодня редко устанавливается как новый двигатель, но есть
все еще используется ряд двигателей. Двигатель с фазным ротором можно использовать
для переменной скорости с вставкой вторичных резисторов. Стартовый
ток и пусковой момент двигателя были главными соображениями
при выборе двигателя с фазным ротором для установки.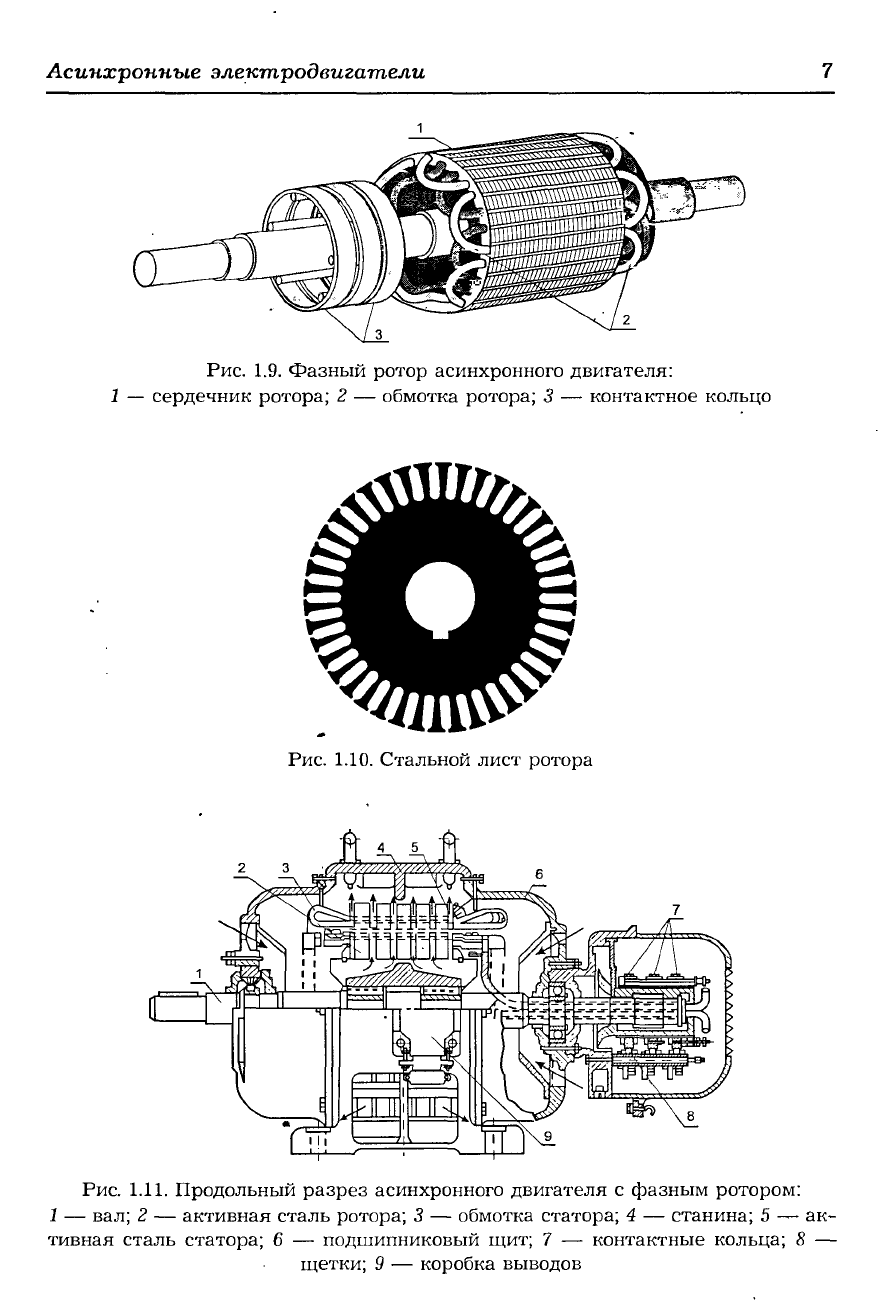 Есть еще
много ссылок на двигатель с фазным ротором, используемый в Национальном электротехническом
Код.
Есть еще
много ссылок на двигатель с фазным ротором, используемый в Национальном электротехническом
Код.
ВИКТОРИНА
Дайте исчерпывающие ответы на следующие вопросы.
1. Перечислите основные части асинхронного двигателя с фазным ротором.
2. Перечислите две причины, по которым асинхронный двигатель с ротором запускается с все сопротивление, вставленное в регулятор скорости.
3. Трехфазный асинхронный двигатель с фазным ротором имеет шесть полюсов и рассчитан на на 60 герц. Скорость этого двигателя при полной нагрузке со всем сопротивлением вырез из регулятора скорости составляет 1120 об / мин.Что такое синхронный скорость поля, создаваемого обмотками статора?
4. Определите процент скольжения при номинальной нагрузке для рассматриваемого двигателя. 3.
5. Почему вместо короткозамкнутого ротора используется асинхронный двигатель с фазным ротором? асинхронный двигатель для некоторых промышленных применений?
6. Почему низкий КПД асинхронного двигателя с фазным ротором?
при работе с номинальной нагрузкой со всем сопротивлением, вставленным в
регулятор скорости?
Почему низкий КПД асинхронного двигателя с фазным ротором?
при работе с номинальной нагрузкой со всем сопротивлением, вставленным в
регулятор скорости?
7.Что нужно сделать, чтобы изменить направление вращения ротора с фазной фазой Индукционный двигатель?
8. Почему коэффициент мощности асинхронного двигателя с ротором низкий? нагрузка?
9. Перечислите два фактора, которые влияют на синхронную скорость вращения магнитное поле, создаваемое током в обмотках статора.
B. Выберите правильный ответ для каждого из следующих утверждений и поместите соответствующую букву в отведенное место.
10.Скорость двигателя с фазным ротором увеличена на:
а. вставка сопротивления в первичной цепи.
г. вставка сопротивления во вторичной цепи.
г. уменьшение сопротивления во вторичной цепи.
г. уменьшение сопротивления в первичной цепи.
11. Пусковой ток асинхронного двигателя с ротором ограничен:
а. уменьшение сопротивления в первичной цепи.
уменьшение сопротивления в первичной цепи.
г.уменьшение сопротивления во вторичной цепи.
г. вставка сопротивления в первичной цепи.
г. вставка сопротивления во вторичной цепи.
12. Направление вращения электродвигателя с фазным ротором изменяют перестановкой мест. любые два из трех:
а. L1, L2, L3 c. М1, М2, М3
г. Т1, Т2, Т3 d. все из этого.
13. Двигатели с фазным ротором могут использоваться с:
а. ручные регуляторы скорости.
г. автоматические регуляторы скорости.
г. выбор кнопки.
г. все из этого.
14. Оптимальный КПД двигателя с фазным ротором при полной нагрузке:
а. все сопротивление отключено от вторичной цепи.
г. все сопротивление отключено во вторичной цепи.
г. он работает медленно.
г. он работает на средней скорости.
15. Основным преимуществом многофазного двигателя с фазным ротором является то, что он a. имеет низкий пусковой момент. c. быстро изменится.
имеет низкий пусковой момент. c. быстро изменится.
г. имеет широкий диапазон скоростей. d. имеет низкий диапазон скоростей.
16. Двигатель с фазным ротором назван так, потому что:
а. ротор намотан проволокой.
г. статор намотан проволокой.
г. Контроллер обмотан проводом.
г. все из этого.
17. Намагничивающая составляющая тока нагрузки …
а. составляет небольшую часть от общего тока двигателя без нагрузки.
г. намагничивает железо, вызывая взаимодействие между ротором и статор.
г. составляет большую часть от общего тока двигателя при полной нагрузке.
г. не зависит от коэффициента мощности.
Асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором (иногда называемый электродвигателем с фазным ротором) является разновидностью стандартных асинхронных двигателей с сепаратором. Двигатели с фазным ротором имеют трехфазную обмотку, намотанную на ротор, которая заканчивается контактными кольцами.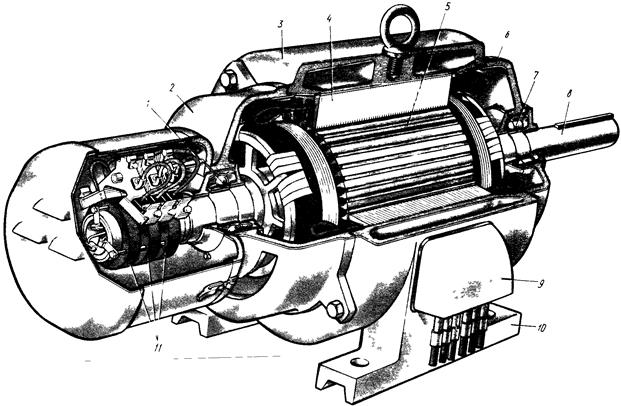 Работу двигателя можно резюмировать следующим образом.
Работу двигателя можно резюмировать следующим образом. - Контактные кольца ротора подключаются к пусковым резисторам для обеспечения контроля тока и скорости при пуске.
- Когда двигатель запускается, частота тока, протекающего через обмотки ротора, составляет около 60 Гц.
- При достижении полной скорости частота тока ротора падает ниже 10 Гц почти до сигнала постоянного тока.
- Двигатель обычно запускается с полным внешним сопротивлением в цепи ротора, которое постепенно уменьшается до нуля, вручную или автоматически.
- Это приводит к очень высокому пусковому крутящему моменту от нулевой скорости до полной скорости при относительно низком пусковом токе.
- При нулевом внешнем сопротивлении характеристики двигателя с фазным ротором приближаются к характеристикам двигателя с короткозамкнутым ротором.
- Если поменять местами любые два провода питания статора, направление вращения меняется на противоположное.

Двигатели с фазным ротором также используются для работы с регулируемой скоростью. Чтобы использовать двигатель с фазным ротором в качестве привода с регулируемой скоростью, резисторы управления ротором должны быть рассчитаны на постоянный ток. Если двигатель используется только для медленного ускорения или высокого пускового момента, но затем работает на максимальной скорости в течение рабочего цикла, то резисторы будут удалены из цепи, когда двигатель будет работать на номинальной скорости.
Чтобы использовать двигатель с фазным ротором в качестве привода с регулируемой скоростью, резисторы управления ротором должны быть рассчитаны на постоянный ток. Если двигатель используется только для медленного ускорения или высокого пускового момента, но затем работает на максимальной скорости в течение рабочего цикла, то резисторы будут удалены из цепи, когда двигатель будет работать на номинальной скорости.
В этом случае они будут рассчитаны на рабочий цикл только для пускового режима. Скорость зависит от этой нагрузки, поэтому их не следует использовать там, где требуется постоянная скорость при каждой настройке управления, как для станков.
Асинхронный двигатель и синхронный: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей. Один из них стационарный и (обычно) связан с внешним кожухом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием двух полей.
Вращение вызвано взаимодействием двух полей.
В простом двигателе постоянного тока есть вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточного коммутатора. Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для подачи электрического тока во вращающийся якорь. В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле все еще меняется на противоположное, но посредством коммутации, которая происходит электронным способом.
Асинхронный двигатель обладает уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько меньшей скоростью ротора.
Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе. Твердый сердечник ротора состоит из листов электротехнической стали.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Это асинхронные двигатели с фазным ротором.Смысл конструкции состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Когда ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически они становятся такими же, как ротор с короткозамкнутым ротором.
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока.Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора.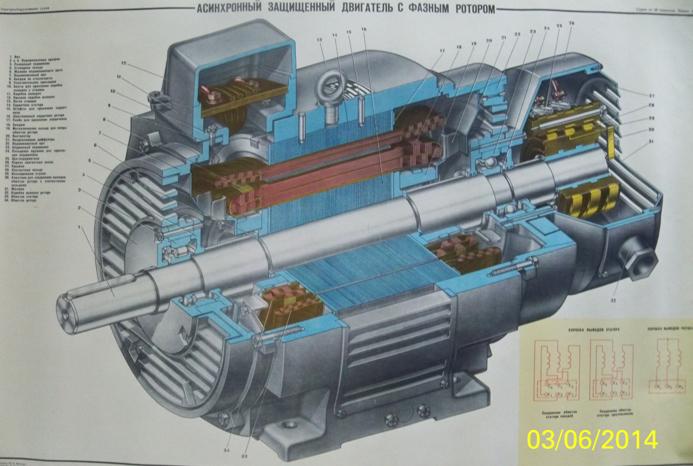 Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит, главным образом, от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора.Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора. Когда к статору изначально подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и напряжение статора. Когда ротор начинает вращаться, частота индуцированного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает эти два значения через f r = sf.Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе.Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента). Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока.Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Частота вращения ротора двигателя, то есть синхронная скорость N, составляет:
N = 120 футов / P = 60 футов / точек
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.
- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.
малой мощности полезны там, где требуется точное время.Синхронные двигатели переменного тока высокой мощности, хотя и более дорогие, чем трехфазные асинхронные двигатели, обладают двумя дополнительными качествами. Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока.Обычно их классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной и непосредственно возбужденной) машине. Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением от постоянного тока.
Синхронные двигатели без возбуждения имеют стальные роторы. В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы.Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраивают специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
Гистерезисный двигатель использует широкую петлю гистерезиса в высококоэрцитивном роторе из кобальтовой стали. Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора.Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора.Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. Последние лифты приводятся в действие этими двигателями, и коробка передач не требуется.
Пример двигателя с постоянными магнитами с электронной коммутацией, в данном случае от небольшого воздушного вентилятора. Этот стиль называется аутраннером, потому что ротор находится вне статора и встроен в лопасти вентилятора.Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации. Синхронный двигатель с прямым возбуждением может называться различными именами, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом. Ротор содержит постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Ротор содержит постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Компьютер контролирует последовательное включение питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба.В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с регулируемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов. Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент.Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых ротор содержит проводники.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки.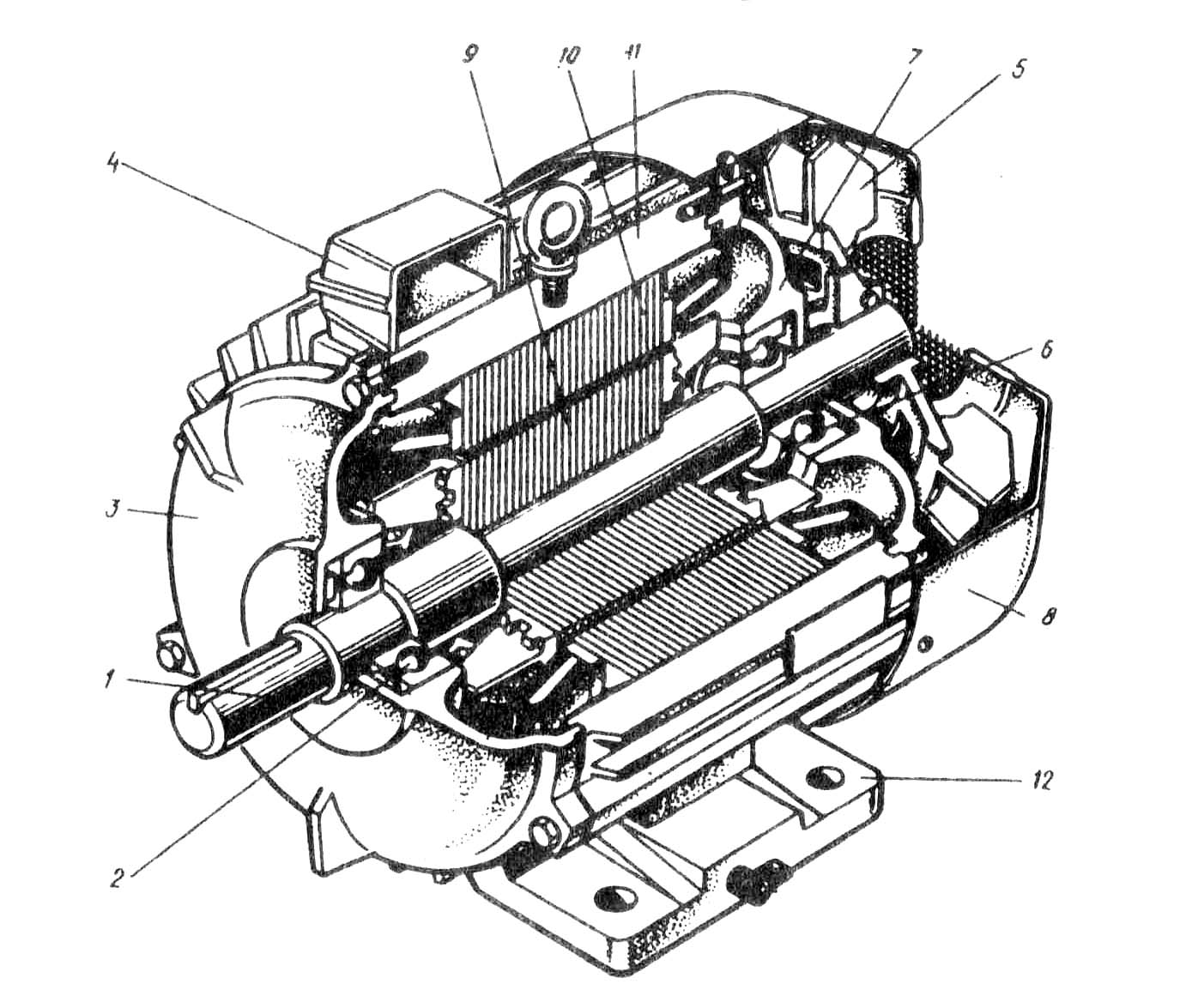 На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
Асинхронный двигатель с обмоткой ротора— Инженерные проекты
Привет, друзья, надеюсь, у вас все хорошо и весело.В моей последней статье мы обсуждали асинхронный двигатель с короткозамкнутым ротором, который является разновидностью трехфазного асинхронного двигателя. Сегодня я собираюсь рассказать вам об асинхронном двигателе с фазным ротором, который также является разновидностью трехфазного асинхронного двигателя. В этом двигателе используется заведенный ротор. О конструкции заведенного ротора я расскажу позже в этой статье. Асинхронный двигатель с фазным ротором также известен как асинхронный двигатель с контактным кольцом.
О конструкции заведенного ротора я расскажу позже в этой статье. Асинхронный двигатель с фазным ротором также известен как асинхронный двигатель с контактным кольцом.
В первом разделе я расскажу вам о конструкции асинхронного двигателя с фазным ротором.Во втором разделе я хотел бы пролить свет на работу и принцип работы асинхронного двигателя с фазным ротором. После этого я расскажу вам о некоторых ключевых особенностях и использовании асинхронного двигателя с обмоткой ротора.
Конструкция асинхронного двигателя с фазным ротором
Как и в других асинхронных двигателях, основными частями являются статор и ротор. Статор этого двигателя такой же, как и в асинхронных двигателях с короткозамкнутым ротором. Ротор — это деталь, которая отличает его от других асинхронных двигателей.Позвольте мне сначала дать вам краткое представление о статоре, а затем я расскажу вам о конструкции ротора.
Статор асинхронного двигателя с фазным ротором
- Как следует из названия, статор является неподвижной частью асинхронного двигателя с фазным ротором.
- Статор и ротор отделены друг от друга небольшим воздушным зазором.
- Статор асинхронного двигателя любого типа представляет собой цилиндрическую раму, внутри которой вращается ротор.
- Цилиндрическая рама имеет канавки на внутренней периферии для размещения электрических цепей.
- Обмотка статора возбуждается переменным током.
- Это была основная конструкция статора, теперь поговорим о роторе.
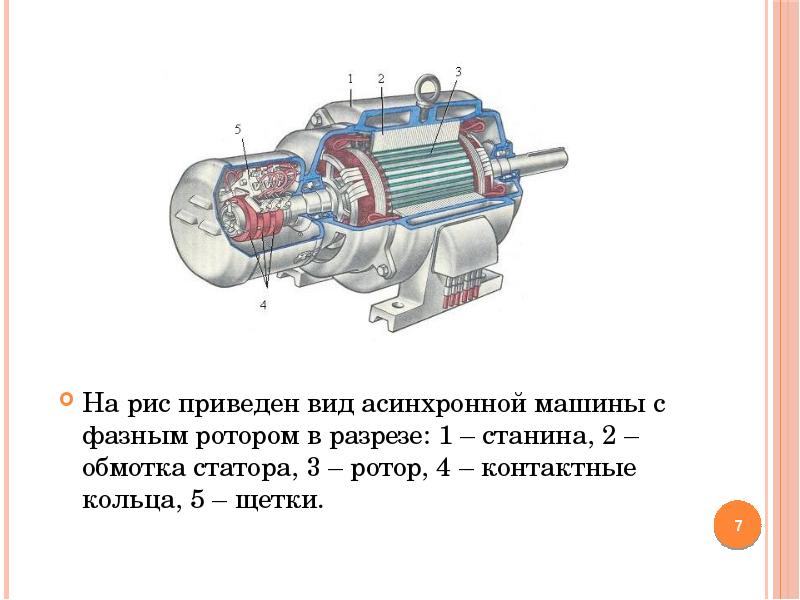
Ротор асинхронного двигателя с обмоткой ротора
- В асинхронном двигателе с обмоткой ротора ротор имеет трехфазную обмотку, аналогичную обмотке статора.
- Ротор также имеет цилиндрическую форму и имеет прорези для обмотки.
- Обмотка равномерно размещена в пазах ротора.
- соединены с 3 контактными кольцами.
- Эти контактные кольца установлены на валу.
- Каждая фаза подключена к одному из трех контактных колец. Эти контактные кольца связаны со щетками.
- Три контактных кольца вращаются вместе с ротором, а щетки остаются неподвижными.
- Это все о конструкции ротора. Теперь обсудим принцип работы.

Работа асинхронного двигателя с фазным ротором
- Принцип работы асинхронного двигателя с фазным ротором такой же, как и у любого другого асинхронного двигателя.
- Питание переменного тока подается на обмотку статора, которая создает магнитное поле, которое вращается из-за изменяющегося во времени источника переменного тока.
- Силовые линии магнитного поля разрезают ротор и индуцируют ЭДС согласно закону Фарадея.
- Индуцированная ЭДС вызовет ток, который создаст другое магнитное поле. Это магнитное поле называется магнитным полем ротора.
- Магнитное поле статора и магнитное поле ротора будут взаимодействовать и создавать крутящий момент, который вращает ротор.
Этот двигатель отличается тем, что обмотки ротора соединены с внешними сопротивлениями через контактные кольца. В этих двигателях скорость и крутящий момент можно регулировать путем изменения сопротивления.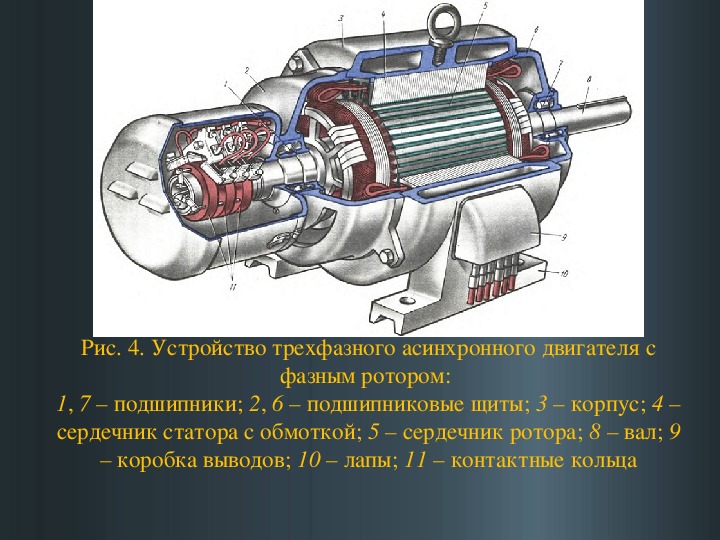 Теперь я расскажу вам о некоторых ключевых особенностях этих двигателей.
Теперь я расскажу вам о некоторых ключевых особенностях этих двигателей.
Вы также можете прочитать:
Основные характеристики
Некоторые из характеристик асинхронных двигателей с фазным ротором указаны ниже:
Управление скоростью
- Скорость таких двигателей можно регулировать.Крутящий момент также можно контролировать.
Высокий пусковой момент
- Эти двигатели обладают высоким пусковым моментом.
Техническое обслуживание
- Асинхронный двигатель с фазным ротором требует большего обслуживания из-за контактных колец и щеток.
Стоимость
- Такие двигатели стоят дороже, чем другие асинхронные двигатели. Стоимость обслуживания также имеет значение.
Низкий пусковой ток
- Этот двигатель потребляет меньший ток при пуске по сравнению с асинхронными двигателями с короткозамкнутым ротором.
КПД
- Асинхронные двигатели с фазным ротором менее эффективны, чем асинхронные двигатели с короткозамкнутым ротором.

Коэффициент мощности
- Эти двигатели имеют низкий коэффициент мощности.
Теперь я перехожу к последнему разделу, в котором я собираюсь рассказать вам о некоторых областях применения асинхронных двигателей с фазным ротором.
Применения
Этот асинхронный двигатель используется и применяется:
- Они используются в областях, где требуется высокий пусковой момент.И там, где нельзя использовать асинхронные двигатели с короткозамкнутым ротором из-за их высоких пусковых токов.
- Эти двигатели используются с высокоинерционными нагрузками.
- Асинхронный двигатель с фазным ротором используется в приложениях, требующих плавного пуска и регулируемой скорости.
- Некоторые области применения этого двигателя включают краны, мельницы, подъемники и конвейеры.
- Асинхронный двигатель с фазным ротором также используется в вентиляторах, нагнетателях и смесителях.
- Они используются в больших насосах в водном хозяйстве.

Разница между синхронным двигателем и асинхронным двигателем
Двигатели переменного тока можно разделить на две основные категории — (i) синхронный двигатель и (ii) асинхронный двигатель . Асинхронный двигатель обычно называют асинхронным двигателем. Оба типа сильно отличаются друг от друга. Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже.Конструктивная разница
- Синхронный двигатель : Статор имеет осевые пазы, которые состоят из обмотки статора, намотанной на определенное количество полюсов.Обычно используется ротор с явнополюсным ротором, на котором установлена обмотка ротора. Обмотка ротора запитана постоянным током с помощью контактных колец. Также можно использовать ротор с постоянными магнитами.
Синхронный двигатель - Асинхронный двигатель : Обмотка статора аналогична обмотке синхронного двигателя. Он накручивается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой.В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко с концевыми кольцами. В роторе с намоткой обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
Асинхронный двигатель
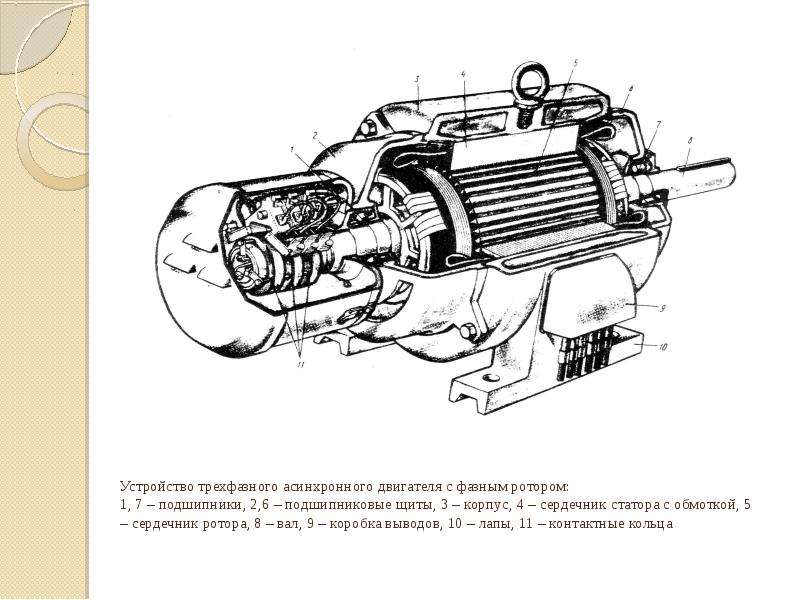 Он накручивается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой.В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко с концевыми кольцами. В роторе с намоткой обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
Он накручивается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой.В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко с концевыми кольцами. В роторе с намоткой обмотки также постоянно закорочены, поэтому контактные кольца не требуются. Разница в рабочем
- Синхронный двигатель : Полюса статора вращаются с синхронной скоростью (Нс) при питании от трехфазного источника питания. Ротор питается от источника постоянного тока.Во время пуска ротор необходимо вращать со скоростью, близкой к синхронной. В этом случае полюса ротора магнитно соединяются с вращающимися полюсами статора, и, таким образом, ротор начинает вращаться с синхронной скоростью.
- Синхронный двигатель всегда работает со скоростью, равной его синхронной скорости.
т.е. Фактическая скорость = Синхронная скорость
или N = Ns = 120f / P - Узнайте больше о работе синхронного двигателя здесь.
- Асинхронный двигатель : Когда на статор подается двух- или трехфазный источник переменного тока, создается вращающееся магнитное поле (RMF).Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора. Ток ротора порождает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его образования, то есть относительной скорости между RMF статора и ротором. Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.

Другие отличия
- Синхронным двигателям требуется дополнительный источник постоянного тока для питания обмотки ротора.Асинхронные двигатели не требуют дополнительного источника питания.
- Контактные кольца и щетки необходимы в синхронных двигателях, но не в асинхронных двигателях (за исключением асинхронного двигателя с обмоткой, в котором двигатели с контактным кольцом используются для добавления внешнего сопротивления обмотке ротора).
- Синхронным двигателям требуется дополнительный пусковой механизм для первоначального вращения ротора, близкого к синхронной скорости. В асинхронных двигателях пусковой механизм не требуется.
- Коэффициент мощности синхронного двигателя можно отрегулировать на отстающий, единичный или опережающий, изменяя возбуждение, тогда как асинхронный двигатель всегда работает с отстающим коэффициентом мощности.
- Синхронные двигатели обычно более эффективны, чем асинхронные.
- Синхронные двигатели дороже.

и короткозамкнутым ротором
Асинхронные машины более известны как асинхронные двигатели, потому что их принцип работы основан на индукции. Вспоминая закон Фарадея, если провод перемещается в магнитном поле, то между двумя его концами возникает разность напряжений. Мы также можем сказать, что в проводе индуцируется напряжение или электродвижущая сила.
Помните также, что имеет значение относительное движение между проводом и магнитным полем; то есть проволока может быть неподвижной, пока магнитное поле движется.
Асинхронный двигатель: Другое название асинхронного двигателя.
Этот принцип, вместе с вращающимся магнитным полем , составляет основу работы асинхронных двигателей и генераторов . Следовательно, можно сказать, что разница между синхронными и асинхронными машинами заключается в их роторах .
Другими словами, все зависит от того, как создается магнитное поле в роторе. В этом смысле конструкция статора синхронной машины и асинхронной машины одинакова, и только роторы отличаются друг от друга.
То есть , в принципе, можно поменять местами статоры двух одинаковых (по размеру и мощности) синхронного и асинхронного двигателя
Существует двух типов асинхронных двигателей. Разница снова связана с конструкцией ротора, и названия этих двух типов основаны на конструкции ротора.Один тип называется двигателем с короткозамкнутым ротором , а другой называется асинхронным двигателем с фазным ротором (WRIM) .
Ротор двигателя с короткозамкнутым ротором не имеет обмотки, и нет необходимости в электрическом подключении ротора к электричеству.
Ротор последнего, однако, как следует из названия, имеет обмотки. Обмотки должны быть подключены к цепям вне ротора, но не к трем линиям напряжения. Расположение обмоток на вращающемся роторе, которые должны быть подключены к внешней цепи, которая является неподвижной, осуществляется через контактные кольца.
Контактные кольца представляют собой металлические круглые кольца, установленные и вращающиеся вместе с валом ротора и соединенные с обмотками ротора, но изолированные от корпуса ротора.
Щетки подпружинены для обеспечения хорошего контакта с поверхностью колец. Они не вращаются и подключены к внешней цепи.
Помните, что в машинах постоянного тока у нас были щетки и коммутаторы. Разница между контактными кольцами и коммутаторами заключается в том, что первые изготовлены из одного куска металла, а вторые — из множества отдельных металлических кусков вокруг кольца.
В обоих случаях они изолированы от валов. Также для машин постоянного тока есть только один коммутатор, а для машин переменного тока есть два (для однофазных) или три (для трехфазных) кольца.
Трехфазный асинхронный двигатель с обмоткой ротораАсинхронный двигатель с короткозамкнутым ротором: Тип асинхронного двигателя переменного тока, в котором обмотка ротора имеет небольшое сопротивление и, следовательно, пропускает очень высокий ток. Чтобы выдерживать высокие токи, конструкция ротора модифицирована и больше напоминает клетку, чем обмотку.
Асинхронный двигатель с фазным ротором (WRIM): Тип асинхронного двигателя переменного тока, в котором ротор имеет проволочную обмотку. Доступ к обмоткам осуществляется через контактные кольца. Другой тип — это двигатель с короткозамкнутым ротором, который не имеет проволочной обмотки и контактных колец.
Рассмотрим Рисунок 1 , в котором однопетлевой провод (для простоты) помещен во вращающееся магнитное поле.
Обратите внимание, что однопроводная петля подключена к резистору, и вместе они образуют замкнутую петлю.Также обратите внимание, что резистор находится вне проволочной петли, и его соединение с проволочной петлей осуществляется через контактные кольца, которые установлены на валу, удерживающем петлю.
Рисунок 1 Один контур обмотки ротора подключен к внешнему контуру через контактные кольца.
Концы петель прикреплены к контактным кольцам, а две щетки обеспечивают соединение между контактными кольцами и внешней цепью.
Вращение магнитного поля статора эквивалентно перемещению провода в стационарном поле.Следующие строки описывают, что происходит в результате:
- Поскольку магнитное поле движется, оно индуцирует напряжение в проводе.
- Поскольку концы проводов подключены к резистору и образуют замкнутую цепь, в контуре (включая резистор) возникает ток, пропорциональный индуцированному напряжению.
- Из-за тока в контуре создается сила, которая толкает каждую сторону провода контура в противоположных направлениях, создавая крутящий момент. Этот крутящий момент заставляет проволочную петлю и ее вал вращаться.
- Вот что происходит в асинхронном двигателе переменного тока с фазным ротором. Нет подключения к электричеству для обмотки ротора (контурный провод), но обмотки ротора образуют замкнутую цепь через внешний резистор.
- Мы видим, что крутящий момент развивается, если в обмотках ротора есть ток. Если нет тока, крутящий момент уменьшается. Другими словами, пока в обмотке ротора есть ток, движение существует. Этот ток существует, когда есть относительное движение между магнитным полем и обмоткой ротора.Если ротор движется с той же скоростью, что и магнитное поле, то относительного движения нет. По этой причине для поддержания тока в двигателе ротор всегда работает медленнее, чем магнитное поле.
- Для простоты и ясности в Рисунок 1 и в приведенном выше описании был только один цикл. Другие петли под другим углом могут быть соединены параллельно показанной петле с использованием тех же контактных колец.
- Одна петля или несколько петель, параллельных друг другу (два соединения), соответствуют однофазной машине.Но обсуждение в равной степени справедливо для трехфазных машин, имеющих три отдельных контура (или три набора параллельных контуров). Обмотка в роторе однофазной машины имеет два вывода, которые должны быть подключены к внешней стороне ротора через два набора контактных колец и щеток. Обмотки трехфазного ротора имеют три вывода и требуют трех контактных колец.
- Ток, протекающий в обмотке ротора, не может быть постоянным; таким образом, он имеет переменную природу на определенной частоте.
- Внешний резистор может использоваться для различных целей (например,ж., при необходимости контроль тока в обмотке ротора). Он также может изменять рабочие характеристики машины.
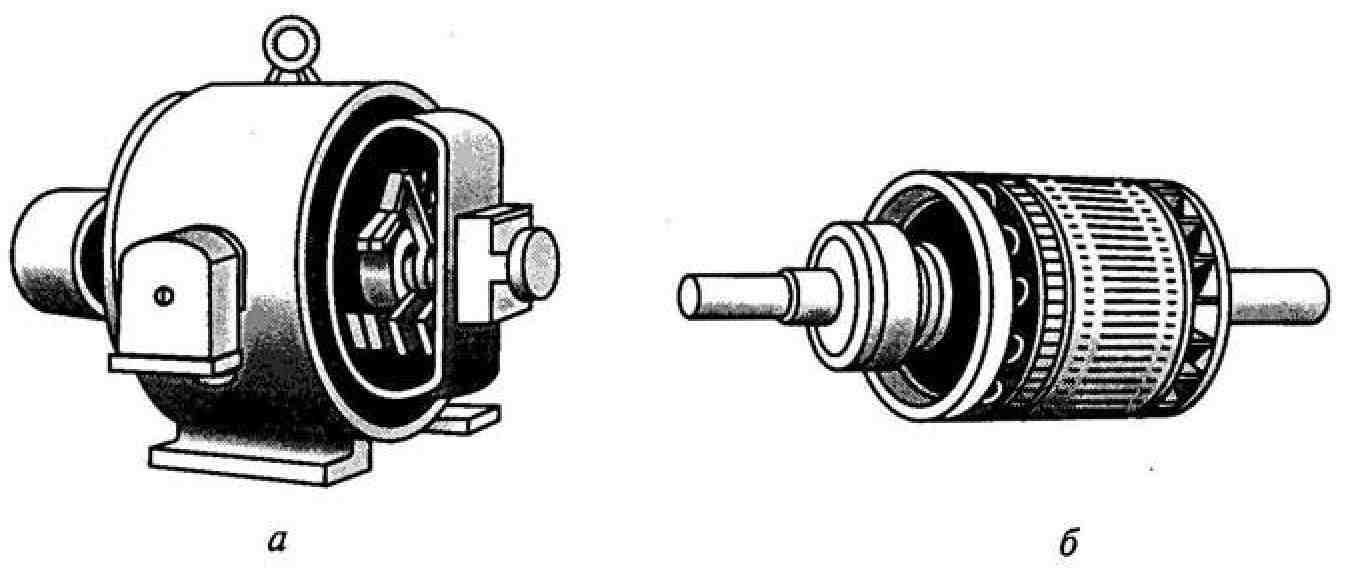 Этот крутящий момент заставляет проволочную петлю и ее вал вращаться.
Этот крутящий момент заставляет проволочную петлю и ее вал вращаться.
Обычно намотка роторов — дорогостоящая работа, а комплекты контактных колец и щеток увеличивают стоимость и требуют ремонта. По этим причинам асинхронные двигатели с фазным ротором относительно дороги.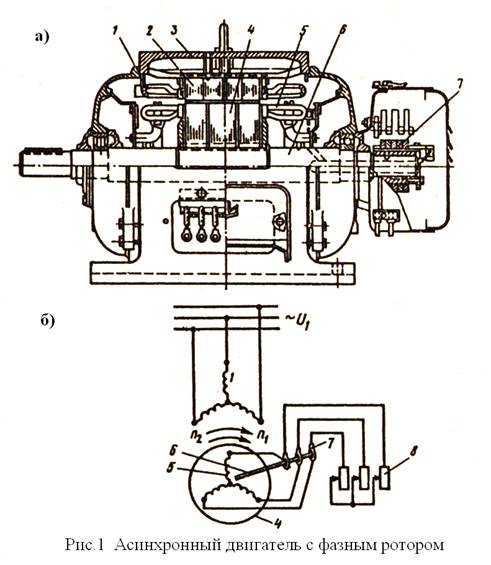 Их аналоги с короткозамкнутым ротором намного дешевле и экономичнее.
Их аналоги с короткозамкнутым ротором намного дешевле и экономичнее.
Ссылаясь на Рисунок 1 , предположим, что внешний резистор заменен на кусок провода без сопротивления.Это сразу вызывает значительное увеличение тока в обмотках ротора.
Для компенсации повышенного тока необходимо соответственно увеличить толщину проводов в обмотках ротора. Помимо увеличения толщины проволоки, мы заметили, что в таком случае нет необходимости в наборе контактных колец, потому что внешние резисторы больше не существуют, и, таким образом, проволочные петли могут быть замкнуты внутри ротора, а не чем вне ротора. Эта последняя реальность легла в основу двигателей с короткозамкнутым ротором , в которых исключена дополнительная стоимость контактных колец и щеток.
Обмотки двигателя с короткозамкнутым ротором представляют собой несколько толстых шин из меди, латуни или алюминия (для передачи очень высоких токов), которые закорочены вместе (образуют параллельные компоненты) на обоих концах.
Поскольку металлические стержни соединены на концах с двумя круглыми кольцами, соединяя их вместе, они образуют форму клетки, как показано на Рисунок 2 . Название «беличья клетка», таким образом, происходит от формы токопроводящих стержней.
Это простейшая форма клетки, в которой стержни имеют круглое поперечное сечение; они параллельны друг другу и параллельны валу ротора.
Рисунок 2 Структура клетки асинхронного двигателя с короткозамкнутым ротором
Стержни могут быть наклонными (как витая клетка) или иметь другое поперечное сечение, а не круглое. Это вариации моделей двигателей с короткозамкнутым ротором по разным причинам или целям.
Алюминиевый или медный сепаратор заделан черным металлом для увеличения проницаемости обмотки ротора. Металлическая среда ламинирована (как металлы в трансформаторе) для предотвращения или уменьшения вихревых токов, тем самым уменьшая тепло и потери.Следовательно, клетка не полая.
Полый ротор будет иметь гораздо менее эффективную работу. Изображение крошечного двигателя с короткозамкнутым ротором, иллюстрирующее ротор с короткозамкнутым ротором, показано на Рис. 3a . (Этот двигатель является однофазным, поскольку он такой маленький.) Трехфазный двигатель с короткозамкнутым ротором мощностью 1,5 л.с. показан на , рис. 3b, .
Большинство двигателей, используемых в промышленности, являются асинхронными. Из них большинство относятся к типу беличьих клеток.Это происходит по очевидной экономической причине; как упоминалось ранее, помимо первоначальной более высокой стоимости, асинхронные двигатели с фазным ротором нуждаются в техническом обслуживании щеток и контактных колец, в то время как двигатель с короткозамкнутым ротором относительно не требует обслуживания. Следовательно, , если это не является необходимым по какой-либо технической причине, после того, как двигатель с короткозамкнутым ротором достигнет приемлемой производительности, он будет кандидатом на работу.