


Arduino и двигатели||Arduino-diy.com
Одно из самых интересных в хобби-электронике – это использование двигателей для «оживления» ваших проектов.
Однако добавление мотора в ваш проект может оказаться непростой задачей, особенно, если вы до этого с приводами не работали.
Данная статья даст вам понимание принципов работы двигателей различных типов и пояснит многие необходимые нюансы и их особенности.
Принцип работы двигателей
Перед тем как разбираться, как именно моторы работаю, давайте сосредоточимся на том, для чего они используются. Моторы используют электромагнитные силы для обеспечения движения, преобразования электроэнергии в механическую.
Магнитные поля создают силу, которая может перемещать объекты. Каждый магнит имеет магнитное поле с северным и южным полюсом. Если вы попробуете приблизить два северных полюса двух магнитов, они будут отталкиваться. То же самое произойдет, если вы попытаетесь приблизить два южных полюса. Если полюса одинаковые, они будут отталкиваться друг от друга. Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Электродвигатель использует свойства магнитов отталкиваться и притягиваться для генерации движения. В обычном электродвигателе два магнита: постоянный и переменный. Переменный магнит называется электромагнитом. Электромагнит создается с помощью пропускания электрического тока через проводник. Постоянный магнит постоянно имеет магнитное поле (северный и южный полюса), а электромагнит генерирует магнитное поле только, когда через него пропускают электрический ток. Сила магнитного поля электромагнита может быть увеличена с помощью повышения тока, проходящего через проводник или методом формирования нескольких обмоток проводника.
В электродвигателе электромагнит устанавливается на ось таким образом, что он может свободно вращаться внутри магнитного поля постоянного магнита. В момент, когда через проводник проходит электрический ток, переменное магнитное поле взаимодействует со статическим магнитным полем магнита, возникают силы отталкивания и притяжения. Это заставляет электромагнит вращаться, возникает движение.
Основные узлы электродвигателя:
— Постоянный магнит (магниты), в случае, когда он установлен неподвижно, называется статором;
— внутри статора есть катушка, которая установлена на оси и вращается, называется ротором.
Двигатели постоянного тока
Двигатели постоянного тока (DC motor) во многом являются самыми простыми электродвигателями. Большинство «щеточных» двигателей работают одинаково. Есть ротор и статор. Есть магниты на статоре и катушка на роторе с магнитным полем, которое генерируется с помощью подачи на нее силы тока. Есть щетки внутри мотора, которые заставляют двигаться ротор.
При использовании источника постоянного тока, для управления подобным двигателем практически ничего не надо. Скорость его вращения зависит от силы тока, которая поступает на катушки от источника питания к коммутатору.
Для вращения оси двигателя в противоположном направлении, достаточно подключить контакты от источника питания к двигателю наоборот.
Шаговые двигатели
Как и двигатели постоянного тока, шаговые двигатели состоят из ротора и статора. Но, в отличие от других двигателей, ротор шагового двигателя представляет из себя постоянный магнит, который вращается внутри полей, создаваемых электромагнитами. Статор состоит из нескольких катушек, которые расположены в корпусе мотора. Когда ток проходит через катушки, подвижный вал двигателя (который является, по сути, постоянным магнитом) располагается в соответствии с генерируемым электромагнитной катушкой полем. Когда катушки заряжаются в определенной последовательности, вал двигателя выбирает новые положения и, соответственно, начинает вращаться.
Ротор приводится в движение последовательной подачей напряжения на катушки. Шаговый двигатель имеет возможность проворачивать ротор на определенный шаг в зависимости от разрешения импульса.
Шаговые двигатели являются отличным выбором для проектов на Arduino (и не только) по нескольким причинам. Они стоят относительно недорого, у них маленькая погрешность, следовательно – это идеальный выбор для управления с разомкнутой системой управления (без дополнительных датчиков положения рабочего органа). Шаговые двигатели будут обеспечивать заданное положение ротора исключительно в зависимости от поданной силы тока.
Эти двигатели предназначены для вращения в одном и противоположном направлении. Если вы подключите источник питания к контактам шагового двигателя, вал начнет вращаться. Если вы подключите проводники наоборот, он будет вращаться в противоположном направлении. Правда, стоит учесть, что в некоторых шаговых двигателях вращение в противоположную сторону невозможно. Перед его запуском, уточняйте этот момент.
Серводвигатели
Обычные серводвигатели для моделистов используются для поворота и удерживания определенной позиции в диапазоне от 0 до 180 градусов. Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
В большинстве случаем серводвигатели имеют три провода: питание, земля и сигнал. Обычно провод питания красного цвета, земля – черного или коричневого. Сигнал – желтый, оранжевый или белый.
В серводвигателях, которые, например, используются в системах управления радиоуправляемых машин, электродвигатель подключен к потенциометру. Стандартный приемник/передатчик посылает ШИМ-сигналы на серву. Электроника (небольшая плата-контроллер) внутри серводвигателя, переводит ширину импульса в положение. Когда на серву поступает сигнал к повороту, питание будет подаваться на мотор до тех пор, пока потенциометр не достигнет положения, которое будет соответствовать заданному предварительно через приемник/передатчик.
Сигнал управления является цифровым ШИМ сигналом с частотой 50 Гц. Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Импульс шириной 1.5 миллисекунды обычно устанавливает серводвигатель в «нейтральное» положение или 90 градусов. Импульс шириной 1.25 миллисекунд может установить его в 0 градусов, а импульс 1.75 миллисекунды в 180 градусов. Физические ограничения и время для различных серводвигателей могут отличаться, но его нейтральное положение всегда соответствует 1.5 миллисекундам.
Вибрационные двигатели
Вибрационные двигатели часто используются в мобильных устройствах для регистрации наличия движения.
Вибрационные моторы по конструктивному исполнению похожи на большинство шаговых двигателей и двигателей постоянного тока. Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать. Интенсивность вибрации зависит как от размеров двигателя, так и от размеров эксцентрика.
На видео сверху показан мотор, установленный на металлической основе. Обратите внимание, как лист металла совершает волновые движения под действием вибрации вибрационного мотора.
Как выбрать двигатель для проекта
Выбор типа двигателя для вашего проекта зависит от того, что именно вы собираетесь автоматизировать. Если вы хотите установить камеру и обеспесить ее поворот влево-вправо, идеальным выбором будет серводвигатель. Если вы передаете движение на зубчатые колеса с необходимостью обеспечения реверса, лучшим выбором станет шаговый двигатель.
Естественно, отличным выбором для управления вашим двигателем станет плата Arduino или ее клоны. Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Дальше в статье приведена информация о том, как можно быстро «оживить» выбранный вами предварительно двигатель с использованием платы Arduino.
Использование шагового двигателя с Arduino
Стоит отметить, что «оживлять» свои проекты с помощью плат Arduino и оболочки Arduino IDE для их программирования очень легко из-за наличия большого количества уже готовых библиотек. Подключение шагового двигателя к плате Arduino отличается от подключения двигателя постоянного тока. Существует специальная библиотека и функция, встроенные в Arduino IDE. Более детально об этом вы можете почитать здесь.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Stepper -> stepper_oneRevolution
Данная программа дает возможность управлять уни- или биполярным шаговым двигателем после его подключения к цифровым пинам 8-11 на плате Arduino. После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
Данный пример – отличное начало. Естественно, вы можете вносить свои коррективы в программу, подстраивая ее под свои задачи. Задержка указывается в миллисекундах, так что если вы не хотите выдерживать паузу между оборотами, можете выставить задержку delay(10). Или, для того, чтобы замедлить вращение можете изменить stepsPerRevolution и присвоить ему значение, например, (1000000).
Изменения скетча зависят от того, что именно вы хотите реализовать. Для лучшего понимания того, как именно происходит обмен данными между шаговым двигателем и платой Arduino, советую поэкспериментировать с другими примерами.
Использование двигателя постоянного тока / вибрационного двигателя с Arduino
В некоторых проектах нет смысла использовать микропроцессоры вроде Arduino. Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
В таком случае, мотор будет подключатся непосредственно к вашему источнику питания через выключатель, который соединен с позитивным коннектором вашего двигателя.
Использование серводвигателя с Arduino
Так же как и шаговые двигатели, для работы серводвигателей в оболочке Arduino IDE есть встроенная библиотека.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Servo -> Knob
Данная программа обеспечивает управление серводвигателем, который подключен к 9-му ШИМ пину платы Arduino. Потенциометр, в свою очередь, подключен к аналоговому пину 0 и обеспечивает управление положением серводвигателя, посылая напряжение, пропорциональное сопротивлению на пин А0 платы Arduino. Скетч, который «залит» в плату Arduino, интерпретирует сигнал в импульсы, которые посылаются на серводвигатель. Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Робот на Ардуино и машинка на Bluetooth своими руками
Робот – машинка на Ардуино становятся одним из самым популярных инженерных проектов в школьной робототехнике. Именно с таких устройств, автономных или управляемых со смартфона и bluetooth, начинается путь в робототехнику “после Lego”. К счастью, сегодня можно без труда купить все необходимые компоненты и достаточно быстро создать своего первого робота для езды по линии или объезда препятствий. В этой статье вы найдете подробную видео инструкцию как сделать продвинутый автомобиль Arduino Car своими руками, с питанием, датчиками линии, расстояния и управлении через bluetooth.
Робот на ардуино своими руками
В отличие от других проектов, создание робота – автомобиля (Arduino Car) требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию машинок без получения базовых навыков работы с платформой Arduino. В любом случае, вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление. Все это потребует определенного терпения.
 Робот машина на Ардуино
Робот машина на АрдуиноВот список ключевых компонентов, которые обязательно встретятся в проекте.
Контроллер Ардуино
Куда уж без него, если мы говорим о проектах на этой платформе. Как правило, роботы машины делают на базе плат Arduino Uno и Nano. Mega будут слишком большие, Pro Mini сложнее подключать к компьютеру и соединять с остальными компонентами, а Leonardo требуют дополнительных навыков в программировании, они дороже и их основное преимущество (тесная интеграция с компьютером в качестве периферийного устройства) в данном случае не слишком востребована.
Есть еще вариант использования плат ESP8266 или ESP32, тогда в проекте появляется возможность управления машиной через WiFi. Но и сами платы и их программирование требует определенных навыков, в этой статье мы будем говорить преимущественно об Uno или Nano.
Конструкция, шасси и двигатели робота на Ардуино
Для того, чтобы что-то поехало или стало перемещаться, надо снабдить “это” колесами, гусеницами или манипуляторами-ногами. Вот тут выбор совершенно не ограничен, можно использовать совершенно любые комбинации и сочетания платформ. Как правило, в качестве начального варианта берутся уже готовые наборы платформ с Алиэкспресс.
 Двигатель, шасси и колеса машинки на ардуино
Двигатель, шасси и колеса машинки на ардуиноЕсли работать со стандартными наборами вам не интересно, можно создать платформу своими руками. Например, разобрать игрушечные радиоуправляемые машинки или любые двигатели на 5-12 вольт, с редукторами или без. Колеса можно создать и самим, что тоже является интересной задачей.
Драйвер двигателей
 Драйвер двигателя L298N
Драйвер двигателя L298NАрдуино – достаточно ранимое устройство, не терпящее больших нагрузок по току. Соединяя его с “брутальными” мощными двигателями, не избежать беды. Поэтому для нормальной совместной работы нам нужно будет включить в схему робота компонент, отвечающий за управление двигателями – подающий и отключающий ток на их обмотки. Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Красивый корпус
Как правило, вся конструкция автомобиля строится вокруг его шасси. Если посмотреть примеры готовых проектов, то они часто выглядят как “провода на колесиках” – внешний вид их изобилует пучками соединительных проводов, ведущих от восседающего на троне контроллера Ардуино к драйверам, моторам и датчикам. Между тем, красивый и функциональный корпус не только вызывает правильные эстетические чувства и помогает выделить вашу модель от остальных. Хороший корпус может превратить игрушку в реальное устройство, помогает привить навыки конструирования и промышленного дизайна, что важно для инженеров любого возраста.
Питание робота
Обеспечение правильной схемы питания – это то, что очень часто оказывается на последнем месте в списке приоритетов начинающих ардуинщиков. Между тем, именно ошибки в схеме электропитания становятся основными причинами проблем, возникающих в процессе работы умных устройств на Ардуино. Создавая ардуино-машинку нужно предусмотреть питание контроллера, двигателей, драйвера и датчиков. У всех них есть свои ограничения и особенности работы, требуется создать оптимальное по весу и сложности решение, позволяющее учесть все эти ограничения.
 Питание робота на Ардуино
Питание робота на АрдуиноСоздавая по-настоящему автономное устройство робота, нужно побеспокоиться и о времени его работы, и о возможности быстрой подзарядки или смены батареек. Как правило, выбираются решения из следующих вариантов:
- Обычные батарейки AA. Тут нужно понимать, что платы Arduino Uno, Nano и большинство двигателей, используемых в Ардуино-робототехнике, требуют напряжения в диапазоне 6-9 вольт. Поэтому придется собрать вместе последовательно не менее 4 батареек на 1,5 В, причем сами батарейки должны быть хорошего качества и обеспечивать работу с достаточно большим током. Например, большинство солевых батареек этим критериям не удовлетворяют. Батарейки AAA при создании ардуино-машинок практически не используются из-за своей пониженной емкости (хотя могут использоваться в миниатюрных моделях, где размер имеет первостепенное значение).
- Аккумулятор AA. Здесь возникает еще большее ограничение по напряжению и току. Большинство аккумуляторов выдают напряжение 1,2 вольт, поэтому их требуется больше для “собирания” нужных нам 6-9 вольт. Несомненным плюсом является возможность перезарядки.
- Литиевые аккумуляторы 18650. Это уже “серьезная артиллерия”, позволяющая получить большое время автономной работы, возможность подзарядки и приемлемые характеристики по току и напряжению. Рабочее напряжение для таких элементов питания – 3,7 В, что позволяет собирать готовую схему питания всего из двух элементов.
- Другие источники питания. Сюда можно включить как более мощные и габаритные никель-металлгидридные, кадмиевые аккумуляторы, так и многочисленные литий-ионные “плоские” варианты, используемые в дронах, смартфонах или другой портативной цифровой технике.
Каким бы ни был источник питания, нужно обеспечить его надежное крепление, удобное расположение, защиту от воздействия недружелюбной окружающей среды. Если вы подключаете к одному источнику и контролер, и двигатели, и датчики, то нужно позаботиться о правильной схеме, включающей, например, надежную связь “по земле” всех устройств.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
Инструкция по сборке робота-автомобиля
В этой статье расскажем вам о том, как по шагам собрать универсального робота на колесной или гусеничной платформе. Управлять им будет микроконтроллер Ардуино нано. Если вам не нравится долго читать, посмотрите в конце статьи на видео, подготовленное нашими партнерами – каналом ArduMast Club.
Пример платформы робота-машины на Ардуино
Предлагаем инструкцию по созданию универсальной платформы, которая потом пригодится для создания самых разных проектов, независимо от выбранного контролера или типа шасси. Вы можете использовать стандартные варианты из Алиэкспресса, как на видео, можете снабдить машину гусеницами и создать вездеход, можете придумать вообще ни на что не похожий вариант. Главное, чтобы число двигателей не превышало 4 и сами ни не были слишком мощными (тогда придется менять тип управления моторами – другой драйвер двигателя).
 Робот на Ардуино
Робот на АрдуиноДля реализации проекта нам понадобится:
- Контроллер Ардуино (в нашем случае, Arduino Nano).
- Драйвер двигателя L298N.
- Двигатели с редукторами.
- Корпус и шасси для крепления колес и оборудования
- Корпус для аккумуляторов 18650 с выключателем.
- Коммутационные провода.
Дополнительное оборудование, которое потребуется для создания полноценного проекта:
- Датчик расстояния и серво-мотор, на который он установлен.
- Инфракрасные датчики линии.
- Светодиоды для индикации и “красоты”.
- Пьезодинамик – пищалка.
- Bluetooth модуль (если собираетесь управлять машинкой дистанционно).
- Sensor shield (упрощает коммутацию).
- Модуль контроля заряда и подзарядки аккумуляторов.
- Сами аккумуляторы.
 Общая схема машинки на Ардуино
Общая схема машинки на АрдуиноСхема электропитания робота автомобиля
Вопрос организации правильного стабильного электропитания является одним из самых важных в любом проекте.В нашей модели применена рекомендованная нами схема питания, основанная на использовании литийионных аккумуляторов формата 18650 и платы защиты их от переразряда и перезаряда.
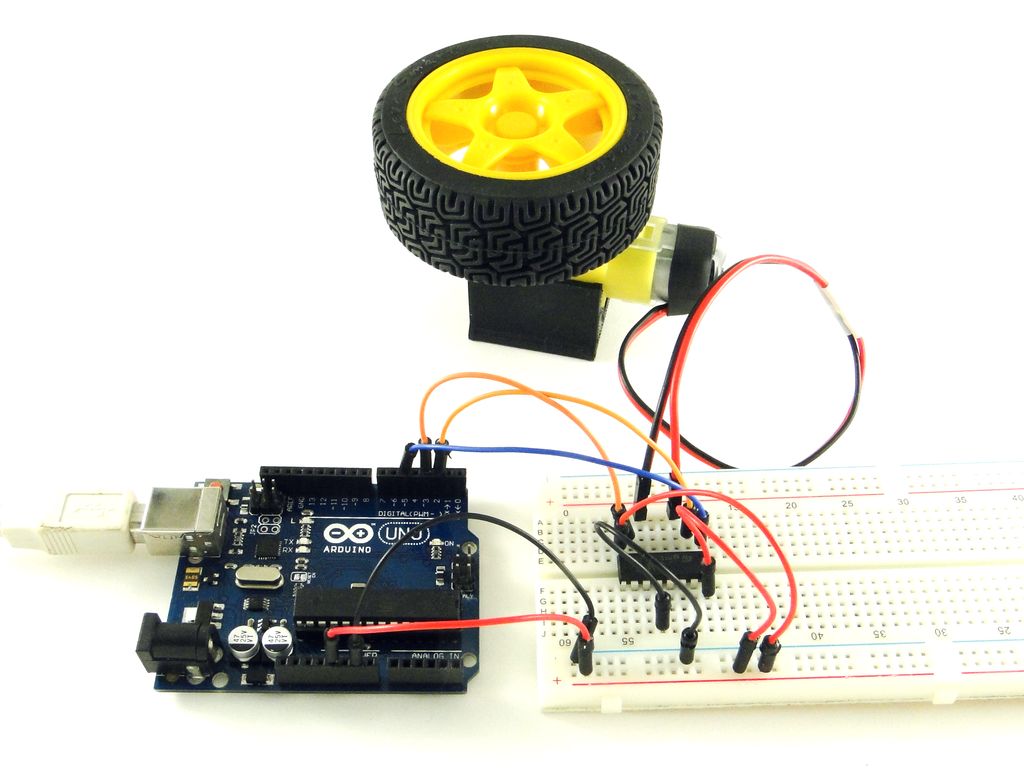
Давайте разберем самый простой вариант схемы питания электромоторов. Перед началом сборки лучше заранее припаять провода к моторам.
 Схема питания и подключения двигателей в ардуино автомобиле
Схема питания и подключения двигателей в ардуино автомобилеВсе достаточно стандартно и вы найдете в интернете десятки подобных примеров. Но в этой схеме есть большой минус – в случае полного разряда аккумуляторы придут в негодность.
 Машинка на Ардуино
Машинка на АрдуиноДля добавления контроллера разряда придется внести следующие изменения в схему:
 Схема питания с контролем разряда аккумулятора
Схема питания с контролем разряда аккумулятораТеперь аккумуляторы будут защищены, но здесь нет возможности заряжать их.
 Питание робота Ардуино
Питание робота АрдуиноДля зарядки можно использовать модуль повышения напряжения с 5v до необходимого уровня зарядки, который зависит от количества серий используемых аккумуляторов. Он имеет гнездо типа микро USB и при частом использовании оно может сломаться, поэтому мы рекомендуем установить дополнительное гнездо для последующей подзарядки пяти вольтовым блоком питания. Для зарядки двух литий-ионных аккумуляторов необходимо настроить выходное напряжение на 8,4 Вольта.
 Схема питания с модулем зарядки для ардуино робота машинки
Схема питания с модулем зарядки для ардуино робота машинкиПодключаем двигатели и плату
С питанием платформы мы разобрались, теперь подключим остальные компоненты. Для начала припаиваем провода к моторам, затем обматываем их изолентой, чтобы случайно в дальнейшем не оторвать контакты. Можно сделать так, что в итоге на 2 двигателя будут идти всего два провода вместо 4х. Это немного упростит монтаж и сэкономит место на платформе.
Монтируем драйвер двигателей на платформу так, чтобы его радиатор был спереди. ЭТО ВАЖНО! В противном случае, вам придется переписывать программу для микроконтроллера.
 Драйвер двигателя для Ардуино робота
Драйвер двигателя для Ардуино роботаЗатем размещаем холдер и плату БМС. Не забываем оставлять место спереди для последующего монтажа каких-либо сенсоров. Ардуиио нужно разместить так, чтобы была в дальнейшем возможность подключить его к ПК для прошивки. Это же правило относится и к модулю для зарядки аккумуляторов.
Питание для ардуино и других электронных компонентов мы возьмем от драйвера двигателей.
Подключаем Bluetooth к машинке
Мы собираемся использовать модуль Bluetooth через SoftwareSerial (библиотеку SoftwareSerial.h), поэтому подключаем модуль блютуз к 3 и 4 цифровым пинам ардуино. RX к D3, TX к D4
 Схема подключения Bluetooth к ардуино машинке
Схема подключения Bluetooth к ардуино машинке Подключаем Bluetooth
Подключаем Bluetooth Схема подключения драйвера двигателя к роботу
Схема подключения драйвера двигателя к роботу
 Схема подключения компонентов к Arduino
Схема подключения компонентов к Arduino
 Датчик расстояния машины
Датчик расстояния машиныПлатформа робота готова! Теперь осталось загрузить прошивку для контроллера Ардуино и программу для смартфона RC CAR. Вы можете посмотреть на нашем сайте обзор Android приложений для работы с Arduino.
Программирование робота на Ардуино
Так как мы делаем инструкцию по сборке универсального робота, то неплохо бы предусмотреть все необходимое для разных вариантов ее использования. Весь код вы можете найти в архиве: https://yadi.sk/d/jIYZQDI-GuytMw
Для езды по черной линии мы задействовали 3 пина под датчики линии и три пина для подключения светодиодов, чтобы иметь возможность визуального контроля наличия линии. Другими словами, если под левым сенсором есть черная линия, то загорится левый светодиод и так далее. Кроме того, мы разработали и протестировали схему, в которой будут одновременно использоваться и управление скоростью моторов по ШИМ, и серводвигатель.
Видео инструкция по сборке робота на Ардуино
Предлагаем вашему вниманию подробную видео-инструкцию по сборке робота автомобиля на Ардуино от нашего партнера – канала ArduMast Club.
Надеемся, статья была полезна для вас. В комментариях под видео вы сможете найти код, схемы робота, соединения деталей, скетч и ссылки на интернет-магазины, в которых вы можете купить все необходимые компоненты.
Что Arduino забыла под капотом старого автомобиля или управление температурой воздуха на впуске необычным способом
И снова здравствуйте!После длительного перерыва решил поделится еще одним нестандартным (и возможно не нужным) решением, но в этот раз у нас машинки будут не игрушечные, а вполне себе настоящие.
Вдумчивое молчание обычно посещает матерых автомехаников когда им объясняют что это…, И да, это СИНЯЯ изолента!
В силу сложившихся обстоятельств (необходимости пересекать линию разграничения) мне однажды стало необходимо перемещать в пространстве именно на автомобиле. Делать это удобнее всего именно таким способом по тем же причинам.
Из кладовки (гаража брата) был извлечен автомобиль марки Mercedes E200 1986 года выпуска.
Тут стоит отметить что ни я ни брат не обладаем великими автомобильными знаниями (а скорее даже наоборот) и возможно «изобретаем велосипед» или наоборот решения будут не сильно адекватные в этой области, но есть задача и мы ее решали как могли.
Постановка задачи.
«Слушаю – забываю, смотрю – запоминаю, делаю – понимаю». Конфуций.
Итак был определен минимальный фронт работ, исходя из нашего видения ситуации, дабы подготовить машину для путешествия. Одна из задач была — отремонтировать систему регулирования температуры поступающего в двигатель воздуха. Система не критичная и возможно чаще даже не нужная, но так как могли быть заморозки пренебрегать этим не стоило.
В двигатель должен поступать воздух определенной температуры (около 20 градусов), по ходу работы происходит смешивание холодного воздуха за бортом с воздухом разогретым выпускной системой (над выпускными патрубками установлен кожух который собирает горячий воздух). Смешивая в разных пропорциях можно регулировать температуру воздуха на входе в двигатель. Эти занимается простая заслонка, типа такой.
Что там внутри и как оно работает можно почитать вот тут у одного хорошего человека.
Если кому интересно немного информации по температуре входного воздуха под спойлером.Совершенно не обладая знаниями в этой области я как обычно начал гуглить. Так сложилось что любой вопрос в авто тематике возводится до уровня религиозного спора где истину часто так и не находят. Поэтому сильно углубляться порой бывает вредно, но при этом основную суть вопроса ухватить стоит, что я и сделал.Итак, факт первый — при сильном морозе и большом потреблении воздуха в районе карбюратора может просто образовываться лед, это усугубляется тем фактом что при испарении бензина смесь еще более охлаждается. Этот лед возможно и не принесет вреда двигателю, но свободно может что-то заморозить в системе смесеобразования и вы приехали.
Факт второй — мы знаем что с повышением температуры плотность воздуха и не только падает, поскольку температура в моторном отсеке немногим ниже температуры прогретого двигателя (около 90 градусов) то сделав впуск просто из моторного отсека мы получаем неслабую разницу с забортной температурой воздуха что ведет к уменьшению количества воздуха в смеси. И он довольно горячий. В карбюраторном двигателе это важно потому что карбюратор не умеет нивелировать этот эффект, то есть он не понимает сколько кислорода в воздухе и не корректирует это объемом воздуха на туже порцию топлива.
Может не сильно удачно, но понятно это иллюстрирует применение в турбированных двигателях интеркуллера для охлаждения разогретого турбиной воздуха. Согласитесь, если бы это было не важно то никто бы не парился с лишней деталью. Естественно что там перепад температур больше, но явление от этого не исчезает и в нашем случае.
Если загуглить также про холодный впуск то увидите обширные поля сражений в эпичном холливаре.
Мне кажется лучше всего и проще это показано тут:
Это что касается вопроса только плотности. Есть еще вопрос касающийся влияния на процесс горения температуры смеси в момент поджига. Если коротко то оно тоже влияет на мощность, но это совсем уже дебри. Кому интересно просим на канал Евгения Травникова этот человечище откроет вам глаза на многие моменты о которых вы и не подозревали.
Итог простой — нужно «махать» заслонкой чтобы добиться приемлемой температуры воздуха.
С завода этой заслонкой управляет довольно простой термосиловой элемент, это латунный патрон из которого выдвигается шток который и тягает заслонку. Внутри патрона находится парафин в вперемешку с металлической пылью, короче от нагрева эта смесь расширяется выталкивая шток.
В нашем случае эта деталь давно была «отремонтирована» до полной негодности нашими смекалистыми аборигенами гаражных кооперативов. Вскрытие показало что вместо полированного штока туда кто-то инсталлировал похожий гвоздь, вбив его до упора (шоб не болталось).
Прикинув стоимость и реальность достать эту деталь в наших краях, я предпринял попытку найти аналог от классики (ВАЗ). Однако как оказалось крайне сложно объяснить что за деталь тебе нужна поскольку в классике чаще всего эту заслонку удаляют как не нужную и посему запасные такие покупают редко, соответственно и спроса нет.
Потратив на поиски около недели я понял что весь функционал этой детали можно организовать за несколько дней с копеечными затратами и дополнительными функциями на базе Arduino. Кроме того, бонусом мы получаем возможность подключение чего угодно, измерение и мониторинг температур там куда засунем датчик, измерение любых напряжений под капотом, UART интерфейс и конечно же бесценный опыт!
Итак что нужно:
— Контроль температуры в корпусе воздушного фильтра.
— Управление заслонкой для регулирования этой температуры.
Что получили:
— Контроль температуры в корпусе воздушного фильтра.
— Управление заслонкой для регулирования этой температуры.
— Контроль температуры где угодно с помощью дополнительных датчиков, я установил еще одни.
— Контроль напряжения бортовой сети.
— Возможность расширить функционал изменением прошивки и добавлением датчиков и исполнительных механизмов.
— UART интерфейс, туда я на время устанавливал адаптер BluetothToUART и мониторил на смартфоне.
1. Неудачная попытка использовать шаговый двигатель от FDD.
Очень мне понравилась идея установить шаговый двигатель от FDD на штатное место термосилового элемента. И оно туда даже встало и даже тягало заслонку. Управлял им с помощью микросхему l293.
Однако в итоге мне сильно не понравилось усилие развиваемое этим двигателем, в условиях подкапотного пространства и тряски этого явно не достаточно, я мог без особого усилия двигать заслонку пальцем. Fail!
2. Использование сервопривода.
Далее было решено переделать все под сервопривод. В случае с последним мы получаем точное позиционирование заслонки, легкость поиска и замены в случае необходимости. Сервопривод был установлен с холодной стороны от заслонки, что бы не грелся от горячего потока воздуха и соединен тягой из скрепки с самой заслонкой. На удивление сделать все это вышло быстрее и в разы удобнее чем с шаговиком, там это было вообще штучное изделие.
3. Arduino.
Была у меня в наличии Arduino Mini Pro, добавил туда еще корпус от ноутбучного БП, пару цифровых датчиков 18b20, самый простой сервопривод, плату DC-DC ШИМ преобразователя KIS-3R33S для того чтобы из бортовых 12В получить привычные 5В, несколько конденсаторов для сглаживания пульсаций, немного проволоки из витой пары. Получилось довольно компактно.
Попробую набросать схему, не думаю что она кому-то нужна но так нагляднее. Особой сложностью она не отличается.
Из схемы видно что осталось уйма свободных входов что можно будет применить в дальнейшем.
Были опасения что вся эта электроника негативно отреагирует на близкое расположение с высоковольтными проводами системы зажигания, но даже блютус адаптер который вообще был вне корпуса и никак не экранирован, нормально вещал из под металлического капота в салон.
Питание на весь блок управления подается от бортовой цепи «15» (это так обзывается в некоторых автомобилях цепь которая включается когда водитель поворачивает ключ и включает зажигание) далее напряжение понижается до 5В от который все и запитано.
Один датчик установлен примерно в месте где стоял старый термосиловой элемент. Второй просто болтается около коробки БУ, (типа меряет температуру подкапотного пространства). На один аналоговый вход ардуины подается бортовое напряжение через делитель, а на второй любое другое, тоже через делитель. У нас были проблемы с клапанами печки поэтому мы мониторили и их работу за одно. Напряжения просто измеряются и ни на что не влияют, это просто для мониторинга.
В целом алгоритм работы сводится к измерению температуры и в соответствии с этим двигать заслонку, передавать данные в UART. Детали можете посмотреть в самом скетче.
Cкетч тут.
4. Android.
Android тут собственно и не причем, просто в качестве дебюта в программировании под него было написано простенькое приложение для отображения данных с блока управления заслонкой. Поскольку приложение простое возможно оно будет полезно тем кто хочет начать программировать блютуз стек под Android.
DIYCarTune
Вот само приложение.
Вот проект под Android Studio.
Приложение будет выводить любые данные которые вы отошлете с Arduino, ее можно применить и не по назначению.
5. Установка и испытания
Весь блок был прикреплен на корпусе заслонки сверху, думаю там будет достаточно тепло и комфортно.
Некоторое время «помониторив» работу я решил что «оно работает». Никаких изменений пока не вносил. Единственный баг это когда при остановке автомобиля набегающий поток резко исчезает, а корректировка идет достаточно медленно так как сам датчик имеет тепловую инерцию нагрева своего корпуса. При необходимости можно повысить частоту коррекции положения заслонки.
Еще испытания показали что поскольку кастрюля воздушного фильтра лежит на двигателе она тоже греется, я этот момент упустил. Это отражается в резком нагреве воздуха при остановке автомобиля.
Показан момент когда машина стоит, заслонка закрыта, идет холодный поток (позиция сервы 170, первый параметр), второй параметр это усредненная температура, третий температура в корпусе воздушного фильтра, четвертый это датчик температуры который весит снаружи блока управления (фактически это температура подкапотного пространства), пятый это напряжение бортовой сети, шестой это напряжение на клапанах печки и последний это время прошедшее с последней корректировки положения заслонки (в скетче выставлено время частоты корректировки положения раз в 60 сек.)
Показать работу самого механизма сложно потому что он закрыт со всех сторон, реальное положение можно увидеть присмотревшись к положению вала на котором сидит заслонка, его торец торчит снаружи и на нем я сделал насечки крайних положений.
P.S. Безусловно что машина бы работала и без этого всего «огорода», но разве мы занимаемся подобным только лишь от жесткой необходимости? )))
Ардуино: управление двигателем постоянного тока, L293D | Класс робототехники
Ардуино: управление двигателем постоянного тока, L293D
Микросхема L293D имеет DIP корпус с 16-ю выводами. Схема выводов ниже.
Помним, что отсчет выводов ведется против часовой стрелки и начинается от выемки в корпусе микросхемы.
- +V — питание микросхема, 5В;
- +Vmotor — питание двигателей, до 36В;
- 0V — земля;
- En1, En2 — выводы включения/выключения H-мостов;
- In1, In2 — управляющие выводы первого H-моста;
- Out1, Out2 — выводы для подключения первого двигателя;
- In3, In4 — управляющие выводы второго H-моста;
- Out3, Out4 — выводы для подключения второго двигателя.
Выводы En1 и En2 служат для отключения или включения мостов. Если мы подаем 0 на En, соответствующий мост полностью выключается и двигатель перестает вращаться. Эти сигналы пригодятся нам для управления тягой двигателя при помощи ШИМ сигнала.
Схема подключения к Ардуино Уно
| Драйвер L293D | In1 | In2 | In3 | In4 | En1 | En2 | V+ | Vmotor+ | 0V |
| Arduino Uno | 7 | 8 | 2 | 3 | 6 | 5 | +5V | +5V | GND |
Для пример, подключим по этой схеме всего один двигатель. Задействуем выводы драйвера In3, In4 и En2. Принципиальная схема подключения будет выглядеть следующим образом:
Внешний вид макета
Вконтакте