


Переделка шагового двигателя из униполярного в биполярный
С каждым годом аддитивные технологии развиваются все стремительней и входят в массы, и от этого , естественно, 3D печать становится только доступней. Но не для всех, и поэтому самые очумелые ручки решаются на собственное принтеростроение из всего что только попадется под руки. Одной из главных загвоздок такого принтеростроения становятся шаговые двигатели. Легче всего их достать из старых МФУ принтеров. Но зачастую двигатели из них являются униполярными и совсем не подходят для драйверов типа А4988 и drv8825. Сам столкнулся с такой проблемой, много читал про переделку в биполярный шаговый двигатель и теперь хочу поделиться с вами:)Вот схема соединения катушек униполярного и биполярного шаговых двигателей:
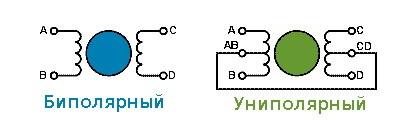 Как видно, разница в том, что у униполярного шаговика середины обмоток соединены.
Как видно, разница в том, что у униполярного шаговика середины обмоток соединены.У самого были вот такие шаговики:

Для разборки откручиваем 4 болта и снимаем заднюю крышку. Вот что мы должны увидеть:
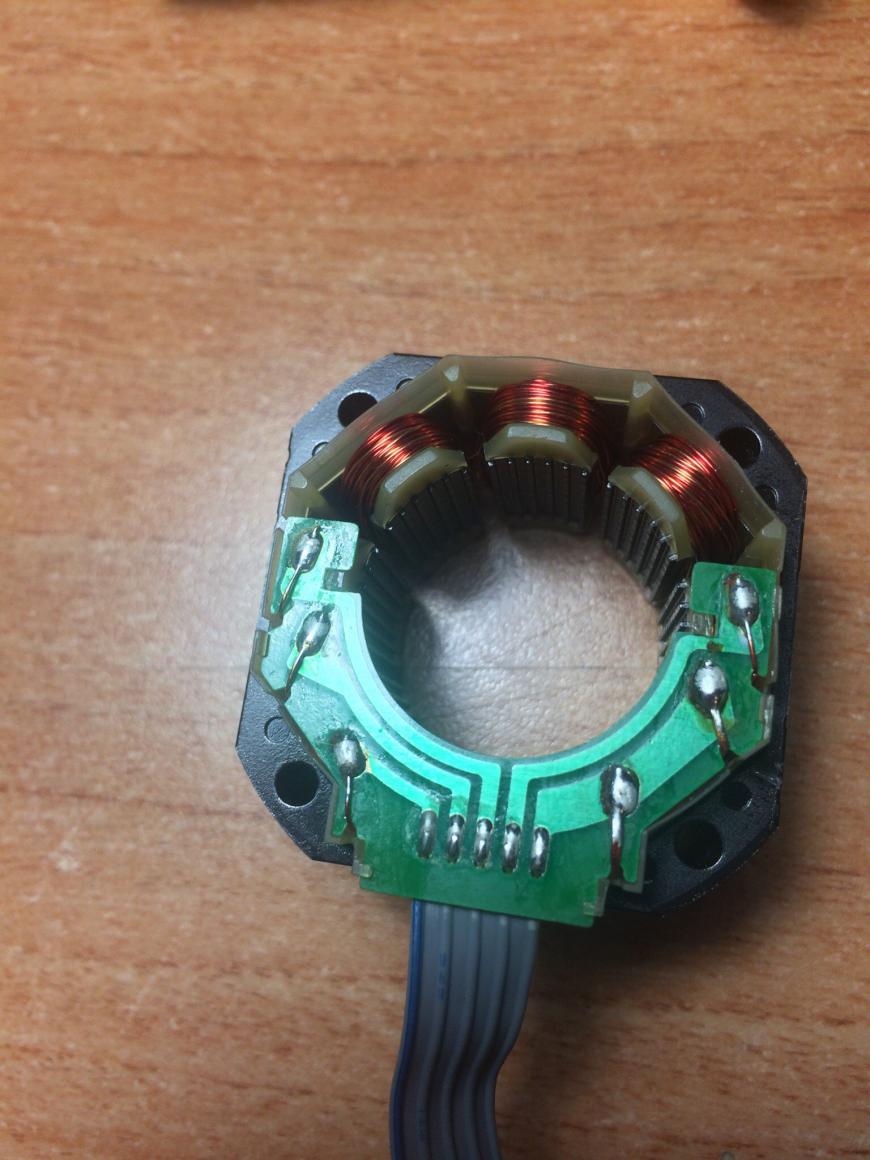 Первым логичным решением кажется просто перерезать пятую слева дорожку, но в большинстве случаев это не возымеет какого-либо эффекта. Если внимательно приглядеться, то заметно, что к пяточкам первых четырех дорожек припаяно по одному проводу, а к пятой уже по два . Отпаиваем их. Дальше все выводы мысленно нумеруем :
Первым логичным решением кажется просто перерезать пятую слева дорожку, но в большинстве случаев это не возымеет какого-либо эффекта. Если внимательно приглядеться, то заметно, что к пяточкам первых четырех дорожек припаяно по одному проводу, а к пятой уже по два . Отпаиваем их. Дальше все выводы мысленно нумеруем :
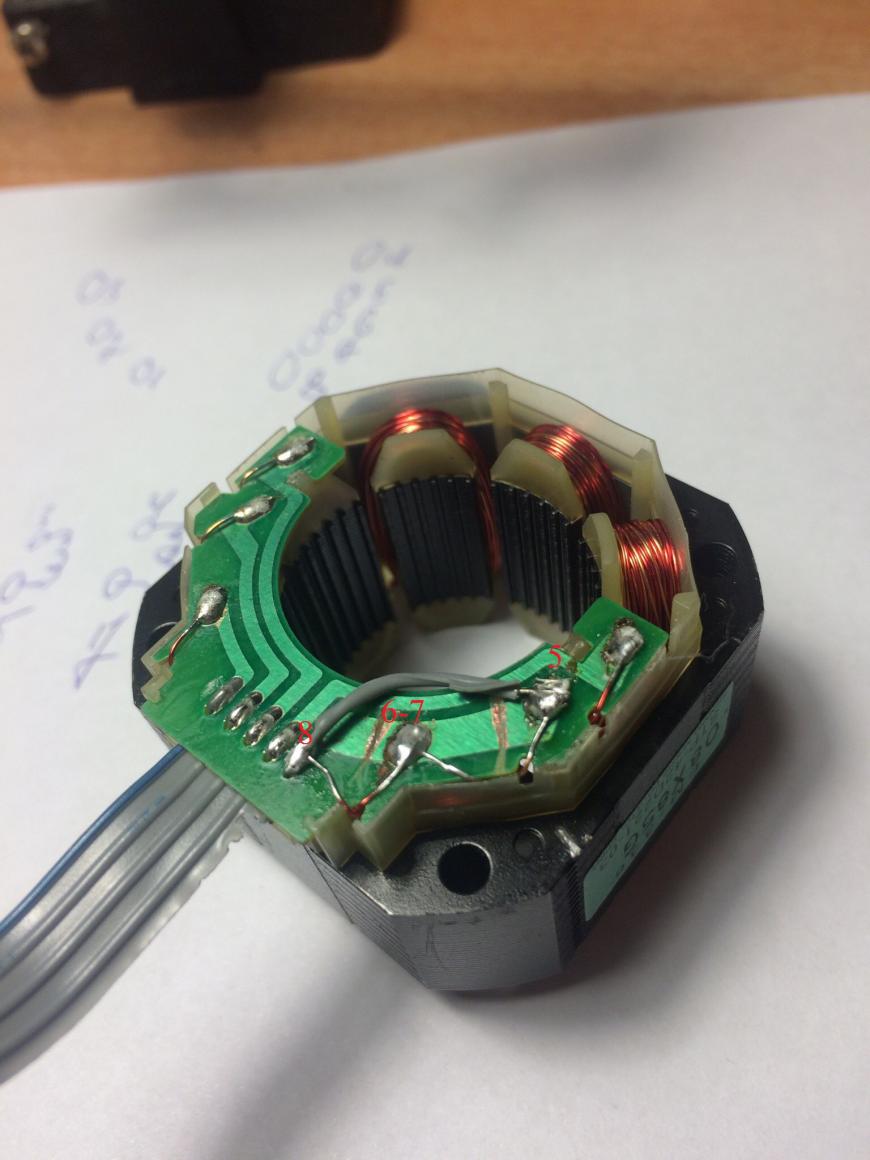 Также подпоял джамперы для более удобного подключения к плате управления:
Также подпоял джамперы для более удобного подключения к плате управления: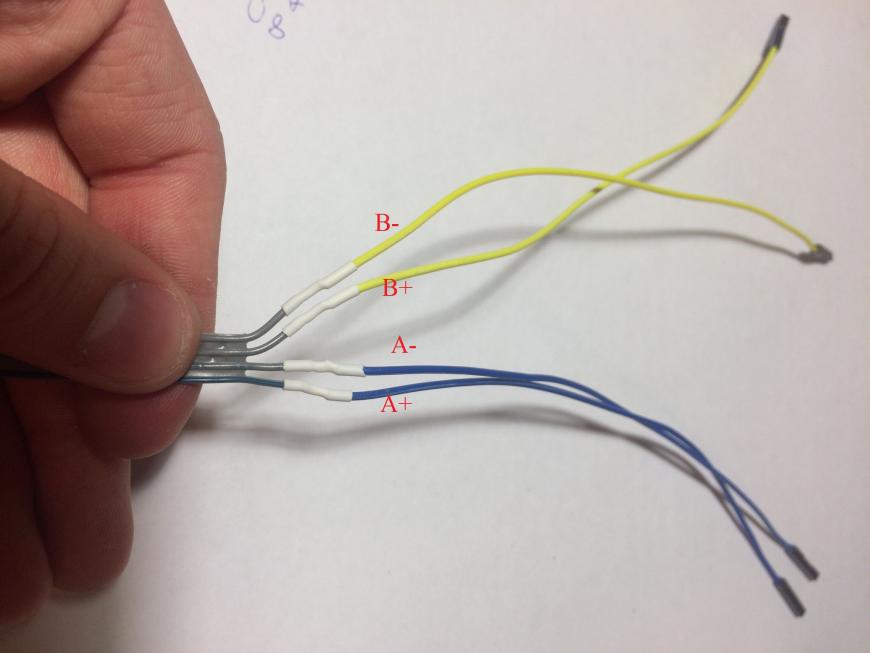
Всем спасибо за внимание и хороших будней!))
Биполярные и униполярные шаговые двигатели
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным.
Каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной системе управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — I
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
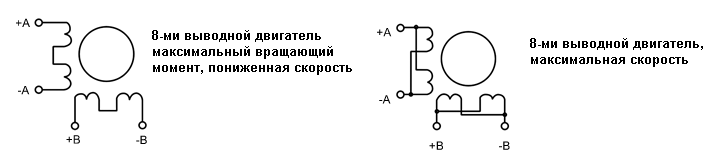
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное последовательное подключение
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
I
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 1.4 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр.. = 0.5 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр.. = 4 * Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
| Параметр | униполярное | параллельное | последовательное |
|---|---|---|---|
| Ток/ фаза, А | 2 | 2.8 | 1.4 |
| Сопротивление обмотки, Ом | 1.5 | 0.75 | 3 |
| Индуктивность обмотки, мГн | 3 | 1.5 | 6 |
| Крутящий момент, кг×см | 22 кг х см | 31 кг х см | 31 кг х см |
| Преимущества / недостатки | Средний момент при среднем энергопотреблении | Высокий момент при высоком потреблении тока | Высокий момент на низких скоростях при низком энергопотреблении |
| Максимальная эффективность | средний скоростной диапазон | высокоскоростной диапазон | низкоскоростной диапазон |
Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения
Управление униполярными шаговыми двигателями — Меандр — занимательная электроника
В статье рассматриваются практические решения для управления униполярными шаговыми двигателями. Рассматриваемые решения могут быть легко использованы на практике для различных приложений.В настоящей статье даются рекомендации по проектированию электроприводов униполярными шаговыми двигателями и предлагаются несложные практические решения. По собственному опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных шаговых двигателей.
Напомню, что основное свойство шагового двигателя в отличие от других типов электродвигателей как переменного, так и постоянного тока является то, что сдвиг его ротора осуществляется на заданный его конструкцией шаг (чаще это угол, реже — линейное смещение) при подаче на его обмотки импульсов напряжения. В этом он похож на шаговое реле, известное еще с XIX века. Его нельзя путать и с многофазными двигателями. Формально шаговые двигатели относятся к двигателям постоянного тока, но они не имеют коллектора (поэтому надежность их выше и помех от них значительно меньше). Для создания момента вращения в этих двигателях, в отличие от коллекторных двигателей постоянного тока, требуется внешнее импульсное управление обмотками, которые расположены не на роторе (который представляет собой постоянный магнит), а на статоре. Другими словами, если вы подадите на обмотку такого двигателя постоянное напряжения, то вращения ротора не будет. Нужно специальное устройство управления — коммутатор. В этом они проигрывают традиционным коллекторным двигателям постоянного тока. Но зато они выигрывают в большем моменте на малых и сверхмалых скоростях вращения, поэтому во многих применениях им не нужен редуктор. Кроме того, они обеспечивают без специальных конструктивных или схемных ухищрений точное позиционирование ротора и торможение, так как обладают не только моментом вращения, но и моментом удержания, который по величине выше момента вращения.
Имеются шаговые двигатели не только традиционного исполнения с вращающимся ротором, но и с его линейным перемещением. В последнем случае на один управляющий импульс происходит линейное смещение ротора на строго заданную конструкцией двигателя величину (подробности см. в [1]). Еще одно важное замечание: шаговый двигатель, в отличие от коллекторного, при стопорении ротора не увеличивает потребление энергии.
Конструкция двигателя
Шаговые двигатели различаются, как по конструктивному исполнению, так и по конфигурации соединения их обмоток. Исполнение двигателей в части обмоток может быть биполярное и униполярное. Основное преимущество униполярных шаговых двигателей заключается в простоте их систем управления, но они имеют меньший момент вращения [1]. На рис.1,а показано «классическое» исполнение включения обмоток, а на рис.1,б — универсальное с расщепленными обмотками, которое позволяет включать двигатель, как в униполярном, так и в биполярном вариантах. Кроме того, в «классическом исполнении» в некоторых типах двигателей средние выводы обмоток (выводы АВ, CD на рис.1,а) могут быть конструктивно объединены внутри самого двигателя (такой вариант как раз показан на фото в начале статьи). Так что если вам попался в руки неизвестный шаговый двигатель, то по количеству выводов вы относительно легко сможете его идентифицировать. Двигатели с шестью и пятью выводами будут гарантировано униполярными. Остается только оп разделить фазировку обмоток. К сожалению, это можно будет сделать только экспериментально. Какой-либо стандартизации по цвету проводов пока нет.
Рис. 1
Конфигурация обмоток униполярных шаговых двигателей и двигателей с расщепленными обмотками в униполярном включении позволяет обойтись без сложных драйверов и дорогостоящих ИМС. Кроме того, классические униполярные двигатели дешевле, так как, в основном, этот тип включения обмоток характерен для двигателей на постоянных магнитах с шагом 18° или 7,5°. Дробление такого большого шага осуществляется, как правило, дополнительным редуктором, который может быть конструктивно совмещен с двигателем [2].
Схема управления униполярного шагового двигателя с универсальным коммутатором
Практическое решение для управления униполярным шаговым двигателем потребовалось автору при использовании двигателя серии P542-M48 [2], а именно униполярного шагового двигателя P542-M482U с встроенным редуктором G23 (125:1). Поскольку двигатель униполярный, то схема его управления, как было указано выше, не содержит ни дорогих ИМС, ни специальных сложных драйверов, достаточно обычных ключей. Коммутатор включения обмоток выполнен на базе технического решения, опубликованного в [3]. Пример практической схемы управления, разработанной автором статьи, которая годится для самых различных применений, показан на рис.2.
Рис. 2
Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «STEP» («Шаг»), необходимое направление вращения устанавливается через вход «DIRECTION» («Направление вращения»). Оба эти сигнала имеют логические уровни, и если для их формирования используются выходы с открытым коллектором, то требуются соответствующие резисторы подтяжки (на схеме рис.2 они не показаны). Временная диаграмма работы коммутатора (рис2) показана на рис.3, где верхние две трассы — Q1 D2-2, 02 D2-2; нижние две трассы — Q1 D2-1, Q2 D2-1. Маркеры показывают область изменения очередности включения фаз.
Как можно видеть, здесь реализован полношаговый режим управления (подробно см. [1]) с перекрытием фаз, то есть один импульс сдвигает ротор двигателя на один шаг, но в некоторый момент (половина длительности импульса) фазы накладываются друг на друга (рис.3).
Рис. 3
Схема управления шаговым двигателем без реверса
Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (рис.4), при этом частота вращения остается неизменной, а диаграмма управления остается аналогичной той, которая показана на рис.3 (трассы до переключения очередности фаз), но уже без возможности изменения направления вращения двигателя.
Рис. 4
Схема управления с режимами удержания и выключения
Управление моментом вращения устанавливается изменением тока в обмотках двигателя от регулируемого источника напряжения положительной полярности (автором использовался импульсный понижающий стабилизатор, выполненный по типовой схеме на стандартной ИМС с опцией внешнего включения). Расчет такого DC/DC-преобразователя можно легко выполнить в интерактивном режиме [4], хотя за время, прошедшее со времени публикации, в этот on-line калькулятор высокого уровня и были внесены некоторые изменения, но основа осталась та же. Полное отключение двигателя без удержания ротора осуществляется снятием питающего напряжения с обмоток. Это легко выполнить через вход выключения преобразователя, задав в [4] при выборе ИМС соответствующую опцию. В авторском варианте использовалась ИМС LM2675M-ADJ [5]. Остановка с фиксацией ротора, режим удержания, осуществляется прекращением подачи напряжения с частотой коммутации (вход «STEP»), одновременно желательно уменьшить величину питающего обмотки напряжения Vdc по крайней мере вдвое. С этой точки зрения выбор преобразователя с возможностью регулировки выходного напряжения на ИМС, подобной LM2675M-ADJ, является оптимальным. Пример авторского варианта схемы для формирования напряжения питания обмоток шагового двигателя показан на рис.5. Такая схема пригодна для запитки шаговых двигателей любого типа.
Рис. 5
Схема (рис.5) обеспечивает подачу двух стабильных напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания (формулы, необходимые для расчета выходного напряжения, приведены в [5]). Рабочий режим включается подачей высокого логического уровня на контакт BRAKE (торможение) разъема Х1. Допустимость снижения напряжения питания определяется тем, что момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя момент удержания с редуктором (25:6) равен 19,8 Н*см, а момент вращения всего 6 Н*см. Но при увеличении отношения эта зависимость нивелируется и для двигателей с редукторами с отношением 80 и выше практически не отличаются. Основное преимущество этого метода в том, что он позволяет уменьшить общее потребление тока. В нашем случае с 460 мА до 230 мА, то есть в 2 раза, а мощность в 4 раза, то есть с 5,52 Вт до 1,38 Вт.
Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт ON/OFF разъема X1. Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах на транзисторах VT1, VT2 нет необходимости, выходы схемы управления можно подключить непосредственно вместо упомянутых ключей.
Примечание. В этом варианте использование резисторов подтяжки недопустимо!
В качестве дросселя автором использовалась катушка SDR1006-331К (Bourns). Общее питание формирователя напряжения для обмоток двигателя в рассмотренных режимах может быть уменьшено до 16…18 В, что не окажет никакого влияния на его функционирование. Еще раз обращаю внимание, что при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть лучше закладывать номинальный ток схемы питания, равный удвоенному номинальному току обмоток.
Согласно спецификации [2] оптимальным для двигателей серии P542-M48 является шаг с частотой f=(300…500) Гц. Это и будет определять частоту вращения вала, но частота вращения зависит еще и от конструкции самого двигателя. В нашем случае, без учета редуктора, частота вращения составит:
f*7,5°/360°=(6,25-10,5) об/с,
где 7,5° — это угол поворота ротора двигателя на один шаг управления.
Этот угол как раз и задан конструктивно в самом двигателе. Дальнейшее понижение частоты вращения зависит уже от редуктора.
Изменение частоты вращения двигателя
Частота коммутации обмоток вполне может быть увеличена до 1,5 кГц. Для этого с целью компенсации уменьшения момента вращения неизбежного с ростом частоты применяются специальные методы запитки обмоток двигателя. Если внимательно читать спецификацию [2], то можно заметить, что момент вращения двигателя (сноска «Standard Versions») задан для двух условий, а именно: для условия обозначенного как L/R и условия, которое обозначено как L/4R. Можно заметить, что во втором случае частота вращения ротора шагового двигателя, при котором обеспечивается указанный в спецификации момент, заметно выше, а именно 550 Гц вместо 300 Гц. Что это за условия?
Проблема обеспечения момента вращения для шагового двигателя заключается в том, что для них не требуется подача напряжения, а требуется обеспечение тока в обмотках. Именно этот ток создает магнитное поле статора, взаимодействующее с постоянным магнитным полем ротора. Момент на роторе двигателя как раз и определяется взаимодействием этих магнитных полей.
Как известно, ток в индуктивности не может изменяться скачком, а растет по экспоненте до значения
lmax=Vdc/R;
l(t)=lmax*(1-e—t/t).
Требуемое для этого время определяется постоянной времени цепи:
t=L/R,
где:
L — индуктивность обмотки двигателя;
R — общее сопротивление в цепи обмотки.
Это сопротивление может быть как собственным активным сопротивлением обмотки двигателя RL, так и его суммой с некоторым добавочным резистором. Как видно из при веденной формулы, скорость изменения тока в обмотке обратно пропорциональна ее индуктивности и прямо пропорционально сопротивлению. Чем быстрее ток достигнет своего максимального уровня
lmax=Vdc/RL,
где Vdc — это номинальное напряжение запитки обмотки, a Rl — активное сопротивление в цепи обмотки, тем скорее установится заданный момент на роторе. Это и определяет скорость вращения вала шагового двигателя в зависимости от частоты коммутации. Таким образом, наша цель установить (насколько это возможно быстро) ток в обмотке на уровне Vcd/RL.
Импульсное питание двигателя
Просто увеличить напряжение на двигателе выше номинального крайне не желательно, даже если вы уверенны в том, что ток в обмотках при выбранной скорости вращения ротора не превысит допустимый. Остановка двигателя при такой подаче питания может привести к его выходу из строя. Уменьшить время установки номинального тока в обмотке можно, увеличив напряжение Vcd лишь на некоторое время, которое в несколько раз меньше длительности импульса управления, но это потребует дополнительных ключей, поэтому этот способ используется крайне редко. Самым простым методом оказывается включение последовательно с обмоткой двигателя дополнительного сопротивления с одновременным кратным увеличение напряжения питания Vcd. Это и ускорит накопление тока в индуктивности и не приведет к выходу двигателя из строя, так как требование по максимальному току обмотки не будет нарушено. Вот как раз на этот режим и «намекает» спецификация [2].
В классической теории используется режим L/5R, но для рассматриваемого типа двигателя спецификация рекомендует режим L/4R. Обращаю внимание, что здесь имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки R1 и добавочного резистора номиналом 3RL. Ограничение на использование этого метода накладывает высокая рассеиваемая мощность на добавочных резисторах. В рассматриваемом случае при повышении напряжения питания до 4Vcd на добавочных резисторах при малых скоростях вращения, особенно при остановке двигателя, будет рассеиваться мощность:
PR=(3Vcd)2/3RL=(3*12)2/(3*52,4)=8,24 Вт.
Фактически, с учетом допустимого коэффициента нагрузки придется использовать добавочный резистор номиналом в 160 Ом с рассеиваемой мощностью 10 Вт. Как видим, эффективность такого решения крайне низкая. Как выход из положения — использование импульсных стабилизаторов с ограничением максимального тока.
В данном случае для управления биполярным двигателем был применен драйвер с встроенной функцией нарезки, так называемый, чоппинг (от английского термина «chopping» — нарезка). В чем суть этого метода? На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс установления максимального тока обмоток, после достижения заданной величины тока, преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Это решение нельзя назвать дешевым, но его КПД несравненно выше. Сравнение методов управления током в обмотках двигателя показано на рис.6.
Рис. 6
Еще одним важным моментом является правильный выбор диодов, шунтирующих обмотку двигателя (VD1-VD4, рис.2). Назначение этих диодов — гасить э.д.с. самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, то неизбежен выход из строя транзисторных ключей и устройства в целом.
Естественно, что и выбор транзистора для ключей управления обмотками должен осуществляться с учетом максимального тока коммутации, а его подключение учитывать необходимость заряда/разряда емкости затвора. В ряде случаев прямое подключение выходных MOSFET-транзисторов к ИМС коммутатора может быть недопустимым. В этом случае необходимо предусмотреть соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с малым током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I=230 мА ток управления по базе ключа должен составить по крайней мере не менее 15 мА (хотя для нормальной работы ключа нужен ток базы 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем типа 74HC74 недостижим, поэтому потребуются дополнительные драйверы для выходных ключей.
Таким образом, самым оптимальным для управления коммутацией обмоток является использования подходящих по току и сопротивлению канала в открытом состоянии Rdc(on) полевых транзисторов с изолированным затвором (MOSFET) с учетом рекомендаций, описанных выше. В авторском варианте использовали транзисторы IRLML2803 с Rdc(on)=0,25 Ом, допустимой мощность рассеивания 540 мВ и постоянным током стока 0,93 А при температуре 70°С. Мощность, рассеиваемая на ключах, выполненных на транзисторах IRLML280, при полной остановке ротора не превысит:
PVT<Rdc(on)*I2=0,25*(0,230)2=13,2 мВт.
В большинстве случаев такой оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их полного расчета можно воспользоваться методикой, приведенной, например, в [6].
В завершение еще раз небольшое напоминание. Когда речь идет о частоте вращения ротора шагового двигателя, то имеется ввиду именно вращение ротора самого двигателя без редуктора. При этом необходимо учитывать угол поворота его ротора на один шаг. Для рассматриваемого типа двигателя он составляет 7,5°. Имеются шаговые двигатели с углом поворота на один шаг от 18° до 0,9° (чаше 1,8°). Для получения конечного результата необходимо обязательно учитывать этот параметр и коэффициент понижения частоты вращения ротора двигателя соответствующим редуктором. Все необходимые параметры для правильного выбора типа двигателя серии P542-M48 приведены в спецификации [2].
Литература
- Рентюк В. Шаговые двигатели и особенности их применения // Электрик. — 2012. — №11.
- Geared stepper motor Р542-М48 series, Mclennan Servo Supplies Ltd.mclennan.co.uk.
- Rentyuk V. Control stepper motors in both directions // — 2010. — March 18.
- Рентюк В. Проектирование DC/DC-преобразователей в системе WEBENCH Design Center // Электрик. — 2013. — №10.
- LM2675 SIMPLE SWITCHER Power Converter High Efficiency 1A Step-Down Voltage Regulator, Texas Instruments Inc., Rev. June 2005.
- Дьяконов В.П., Маскимчук A.A., Ремнев A.M., Смердов В.Ю. Энциклопедия устройств на полевых транзисторах. — М.: СОЛОН-Р, 2002.
Автор: Владимир Рентюк, г. Запорожье, Украина
Ардуино: шаговый двигатель 28BYJ-48 и драйвер ULN2003 | Класс робототехники

Ардуино: шаговый двигатель 28BYJ-48 и драйвер ULN2003
Волновой режим
Шаговые двигатели бывают униполярные и биполярные. В первом случае электромагнитные катушки двигателя соединены таким образом, что мы можем генерировать на них поле только одного направления. Схема работы униполярного двигателя выглядит следующим образом.
На схеме изображен так называемый волновой режим работы. На каждом шаге работы двигателя мы подаем напряжение только на одну катушку, в которой возникает магнитное поле. Часть сердечника, ближайшая к ротору начинает действовать как южный полюс магнита, вследствие чего ротор поворачивается к ней своим северным полюсом!
Полношаговый режим
Очевидно, что если мы будем подключать одновременно сразу две соседние катушки, то магнитное поле, действующее на ротор будет сильнее, тем самым повысится и крутящий момент двигателя. Такой режим работы униполярного двигателя называется полношаговым.
Полушаговый режим
Наконец, мы можем комбинировать волновой и полношаговый режим, получив полушаговый режим работы. В таком режиме за один оборот ротора двигатель делает в два раза больше шагов, тем самым увеличивая точность позиционирования. Однако, в таком режиме двигатель каждый второй шаг имеет сниженный крутящий момент, о чём не стоит забывать!
Надо заметить, что в реальном шаговом двигателе ротор как правило имеет больше 2-х полюсов, а катушки могут иметь различную конфигурацию. Например, в нашем моторе 28byj-48 электромагниты расположены не перпендикулярно оси ротора, а вдоль него.
В зависимости от конструктивных особенностей, разные шаговые двигатели могут иметь разное количество шагов. Так, наш мотор 28byj-48 делает 32 шага за один оборот ротора. Кроме того у этого мотора есть встроенный шестеренный редуктор с весьма странным передаточным отношением 63.68395:1. С таким редуктором мотор в полношаговом режиме выдаёт около 2048 шагов!
Вконтакте
Быстрые движения под высоким напряжением, или почти вся правда об управлении шаговым мотором
Доброго вам времени суток, уважаемые гики и сочувствующие!
В этой публикации я хочу поделиться своим опытом управления. Точнее – управления шагами. А уж если быть совсем точным, речь пойдёт об управлении замечательным устройством – шаговым электродвигателем.
Что же такое этот самый шаговый электродвигатель? В принципе, в плане функциональности этот мотор можно представить как обычный электромотор, каждый оборот вала которого разбит на множество одинаковых, точно фиксированных шагов. Перемещением на определённое количество шагов мы можем позиционировать вал шагового мотора с высокой точностью и хорошей повторяемостью. Каждый шаг можно разбить на множество ступенек (так называемый микростеппинг), что увеличивает плавность хода мотора, способствует подавлению резонансов, а также увеличивает угловое разрешение. Различия между полношаговым режимом (слева), 1/2 микростеппингом (в центре) и 1/16 микростеппингом (справа) видны невооружённым глазом:
К сожалению, все вышеупомянутые преимущества достигаются ценой значительной сложности системы управления шаговым мотором (для простоты будем называть эту систему драйвером).
Теперь рассмотрим схему работы типичного шагового мотора:
Из этой картинки видно, что шаговый мотор в электрическом плане представляет собой два или более электромагнита, которые необходимо переключать в определённой последовательности для приведения ротора в движение.
Лирическое отступление: На настоящий момент существуют два основных типа шаговых моторов: униполярный и биполярный. Поскольку униполярные моторы имеют меньший крутящий момент и худшие скоростные характеристики, в данной публикации они рассматриваться не будут.
Итак, вернёмся к управлению биполярным мотором. Как это ни парадоксально звучит, но зачастую проще обсуждать общие принципы на конкретных примерах. В качестве примера мы возьмём шаговый мотор ST4118L1804-A производителя Nanotec. Почему именно этот мотор и производитель? Причина проста: по основным характеристикам это типичный представитель моторов типоразмера NEMA 17, широко применяющихся в радиолюбительской практике, и имеет к тому же довольно подробную техдокументацию (которая начисто отсутствует у китайских noname-моторов).
Основные характеристики данного мотора:
Рабочее напряжение 3,15 В
Рабочий ток 1,8 А
Активное сопротивление обмотки 1,75 Ом
Индуктивность обмотки 3,3 мГн
Момент удержания 0,5 Нм
Угловой размер шага 1,8° (200 шагов на один оборот ротора)
В данном случае самое главное — это правильная интерпретация данных. Применив закон Ома, выясняем, что производитель указал рабочий ток и напряжение для постоянного тока, протекающего через обмотки двигателя, без учёта индуктивности.
Проверка: I = U/R, или 1,8 А = 3,15 В/1,75 Ом. Всё сходится.
Какой же будет мощность рассеяния при питании обмоток постоянным током?
Всё просто: P=I x U, или 1,8 А х 3,15 В = 5,67 Вт. В полушаговом режиме возможна ситуация, когда ток течёт через обе обмотки мотора, соответственно рассеиваемую мощность нужно удвоить: 5,67 Вт х 2 = 11,34 Вт. Это достаточно много, и может привести к перегреву мотора. Эта же величина является минимальной мощностью блока питания для этого мотора. Обыкновенный 3D принтер имеет пять подобных моторов, соответственно для питания драйверов необходим источник питания с минимальной мощностью 11,34 Вт х 5 = 56,7 Вт. К этой цифре необходимо добавить электрическую мощность, превращённую мотором в кинетическую или потенциальную энергию при работе принтера. Точный расчёт этой мощности — дело достаточно сложное, на практике проще всего добавить 75% к рассчитанной тепловой мощности и на том завершить расчёты. Почему именно 75%? Дело в том, что обычный шаговый мотор способен совершить полезную работу на величину примерно 2/3 от максимальной тепловой мощности. В данном случае для создания какого-либо узла или устройства сначала подбирается подходящий мотор (например, по крутящему моменту), а после этого рассчитывается мощность блока питания.
Итоговая мощность блока питания для пяти шаговых моторов: 56,7 Вт х 1,75 = 99,225 Вт.
Конечно, на практике ни в одном любительском устройстве не используются моторы под максимальной нагрузкой, и реальная мощность потребления будет, скорее всего, намного ниже расчётной. Я же, как человек ленивый и скаредный, крайне не люблю делать одно и то же два раза, поэтому беру блок питания всегда с некоторым запасом (то есть, согласно вышеприведённым расчётам).
Теперь пришла пора приступить к определению минимально необходимого напряжения блока питания. К сожалению, этому параметру уделяется незаслуженно маленькое внимание в тематических публикациях. Почему этот параметр так важен? Дело в том, что при вращении ротора шагового мотора через катушки течёт переменный ток, ограниченный не только активным, но также и индуктивным сопротивлением обмоток.
Рассмотрим предоставленный производителем график зависимости крутящего момента нашего мотора от частоты вращения:
На графике присутствуют две линии, показывающие зависимость крутящего момента от частоты вращения для напряжения питания 24 В (красная линия) и 48 В (зелёная линия). Нетрудно заметить, что спад крутящего момента начинается примерно с 300 об/мин для 24 В и примерно с 600-700 об/мин для напряжения 48 В. При этом необходимо упомянуть, что производитель использует недоступные любителям дорогостоящие промышленные драйверы. Почему же так важно напряжение питания драйвера, если оно даже в случае питания от 12 В заведомо выше паспортной величины напряжения питания шагового мотора (3,15 В)? Дело в том, что шаговый мотор управляется током, а не напряжением, и именно источниками тока являются все современные драйверы. В идеальном случае драйвер обеспечивает заданный ток в обмотках двигателя вне зависимости от частоты вращения ротора, нагрузки, изменения температуры и других параметров. Это организовано за счёт работы ШИМ-регулятора, управляемого зачастую довольно сложными алгоритмами. Из технической документации нашего мотора видно, что для полного оборота ротору необходимо совершить 200 шагов, при 300 об/мин это составит 60 000 шагов в минуту, или 1000 шагов в секунду. Это, проще говоря, соответствует переменному току частотой 1 кГц. На этой частоте индуктивное сопротивление обмотки составит (R(L)=2π×F×L): 2π х 1 кГц х 3,3 мГн = 20,73 Ом. Какое же напряжение необходимо для обеспеченияя тока в 1,8 А при этом сопротивлении? Закон Ома не дремлет (U=IR): 1,8 А х 20,73 Ом = 37,31 В. Неудивительно, что выше частоты вращения 300 об/мин наблюдается спад крутящего момента: драйверу банально не хватает напряжения питания. Почему же при таком вопиющем недостатке питания (37 — 24 =13 В) спад не наступает при более низкой частоте вращения? Дело в том, что в современных драйверах используется мостовая схема выходных каскадов, что позволяет «удваивать» напряжение, прикладываемое к обмоткам мотора. То есть, теоретически драйвер способен приложить «виртуальные» 48 В к обмоткам при напряжении питания 24 В, что создаёт теоретический запас по напряжению 48 — 37 = 11 В. На практике же этот запас будет нивелирован потерями в драйвере, сопутствующих цепях и активным сопротивлением обмоток мотора (активное сопротивление обмоток присутствует постоянно, и даже несколько возрастает при нагреве мотора). При увеличении частоты вращения ротора свыше 300 об/мин пропорционально растёт частота импульсов и, соответственно, увеличивается индуктивное сопротивление обмотки. При питании от 24 В драйверу перестаёт хватать напряжения питания для поддержания тока в обмотках, и крутящий момент неуклонно снижается. То же самое происходит при питании драйвера от 48 В, но уже гораздо значительно позже, при частоте вращения 600-700 об/мин.
Итак, с мощностью и величиной напряжения блока питания всё ясно, теперь необходимо переходить к практической реализации универсального драйвера, способного как к филигранной работе при помощи крохотных NEMA 11, так и к сотрясению основ мира в паре с могучими NEMA 23. Какими же основными качествами должен иметь драйвер моей мечты?
1. Высокое напряжение питания. Поскольку в техдокументации к моторам крайне редко указано максимальное напряжение питания, лучше будет ограничиться напряжением 48 В.
2. Важнейший параметр: высокий выходной ток. NEMA 23 имеют рабочие токи вплоть до 3,5 А, драйвер должен обеспечивать этот ток с запасом 30%. Путём нехитрых расчётов получаем максимальный рабочий ток около 4,5 А.
3. Простая и оперативная подстройка силы выходного тока.
4. Наличие микростеппинга, как минимум 1/8 шага
5. Наличие защиты от КЗ, перегрева, и т.д.
6. Небольшой размер, возможность крепления произвольного радиатора.
7. Исполнeние в виде интегральной схемы. XXI век на дворе!
8. Простая схема включения с минимальным количеством дискретных компонентов.
9. Низкая цена.
После множества бессонных ночей пятиминутного копания в Google выяснилось, что единственной доступной микросхемой драйвера с подходящими параметрами является TB6600HG. Покупка готового китайского драйвера на eBay показала, что не всё ладно в датском королевстве, далеко не всё. В частности, китайский драйвер отказался напрямую работать с выходами Arduino Due, и «завёлся» только через буферный преобразователь уровней. При работе с трёхамперной нагрузкой драйвер грелся и терял шаги десятками. Вскрытие пациента показало, что в нём не только была установлена микросхема предыдущего поколения (TB6560), а даже и термопаста не смогла найти себе места в списке компонентов. К тому же размерами и весом китайский драйвер наводил меня на мысли о моей молодости… о прошлом веке, если быть совсем точным. Ну нафиг, сказал во мне интеллигент в третьем поколении, мы сделаем свой драйвер, с преферансом и поэтессами. Если бы разработчики KiCAD видели, как я обращаюсь с их детищем, я разорился бы на одних только адвокатах:
С целью минимизации размеров была спроектирована четырёхслойная печатная плата. Этот факт, к сожалению, исключает её изготовление в домашних условиях. Посему на берлинской фирме LeitOn были заказаны 36 таких плат, каждая из которых обошлась в итоге около пяти евро. Часть этих плат были впоследствии выкуплены у меня собратьями по увлечению, и в итоге изготовление плат вышло не слишком накладным предприятием. Микросхемы TBB6600HG были заказаны на Aliexpress по 4 евро за штуку, остальные компоненты были заказаны на eBay, в пересчёте на один драйвер цена дискретных компонентов составила 2 евро. В качестве радиаторов были взяты пятисантиметровые отрезки П-образного алюминиевого профиля, пластиковые каркасы были отпечатаны на 3D принтере. Итого цена одного драйвера составила около 12 евро. Это справедливая цена за драйвер со следующими характеристиками:
Напряжение питания от 8 до 42 Вольт
Максимальный долговременный рабочий ток 4,5 Ампер, устанавливается потенциометром
Микростеппинг вплоть до 1/16 шага
Защита: КЗ, перегрев, низкое напряжение питания
Компактные размеры и низкий вес
Работа с уровнями входных сигналов от 3,3 до 5,5 вольт
Простая установка микростеппинга с помошью микропереключателей — к чёрту перемычки!
Готовые печатные платы:
Собранные и недособранные драйверы.
Видео работы драйвера в моём старом 3D принтере. Здесь трёхамперный NEMA 17 бодро гоняет подогреваемую рабочую площадку принтера размером 45 х 25 см через шестнадцатимиллиметровый шпиндель длиной 60 см:
Финальное фото: самодельные драйвера на своём рабочем месте в моём новом 3D принтере.
Публикуется под лицензией WTFPL
Ну, и традиционное: Have fun!