


Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4
Добрый день 3д печатники и ‘колхозники’.Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет шесть проводов, и что бы подключить его к Ramp 1.4 или любой другой плате нам потребуется переделать его из униполярного в биполярный.
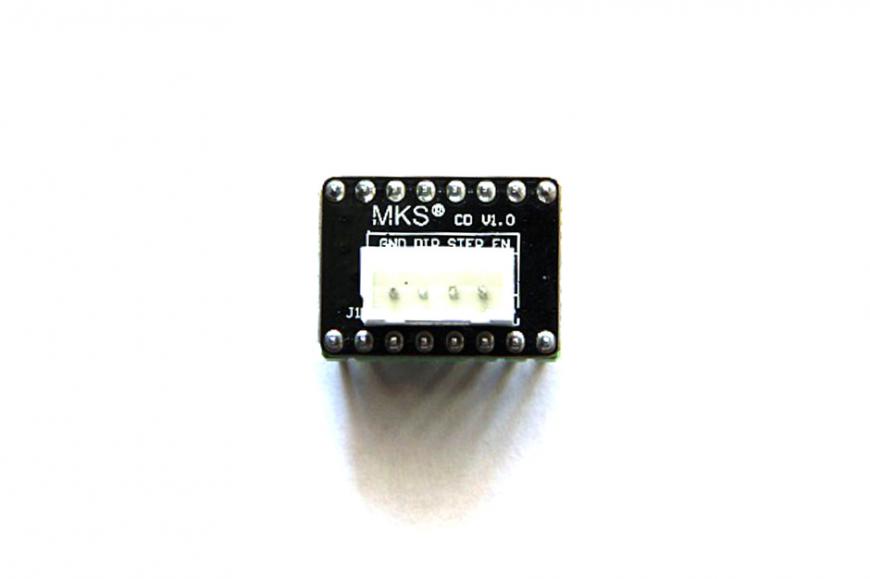
 Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.Немного теории.
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
На схеме ниже показаны два двигателя. Слева униполярный, 6 выводов. Справа биполярный, 4 вывода.
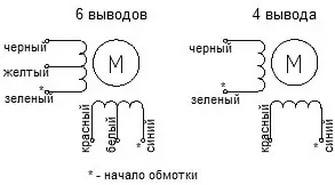 Аналогичная схема ниже, но у же с буквенным обозначением выводов.
Аналогичная схема ниже, но у же с буквенным обозначением выводов.Я соберу тестовый стенд для наглядности, который включает в себя: ramps 1.4, arduino mega 2560, драйвер шагового двигателя TB6600, плата MKS CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель NEMA 23 57HM56-2006.
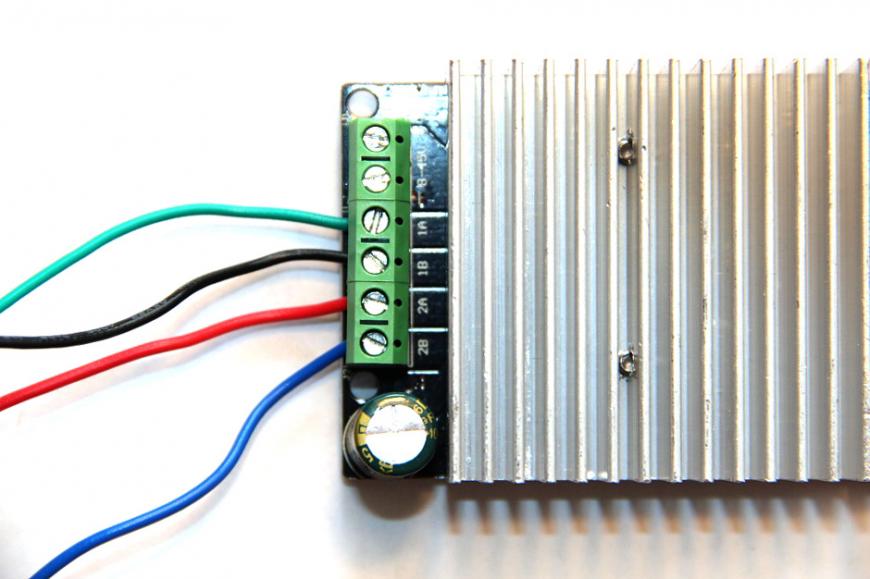
1) Первый вариант. Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.
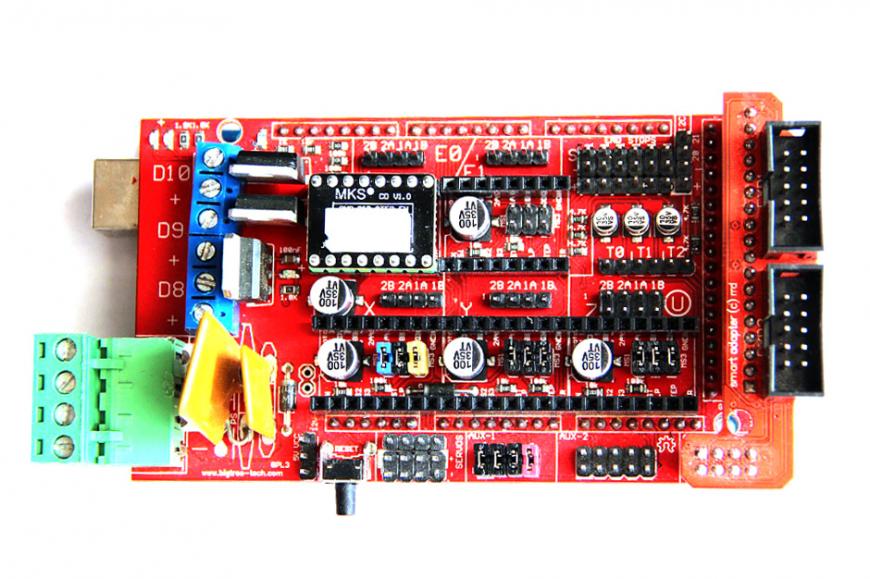
Пошаговая инструкция для чайников :).1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
 2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
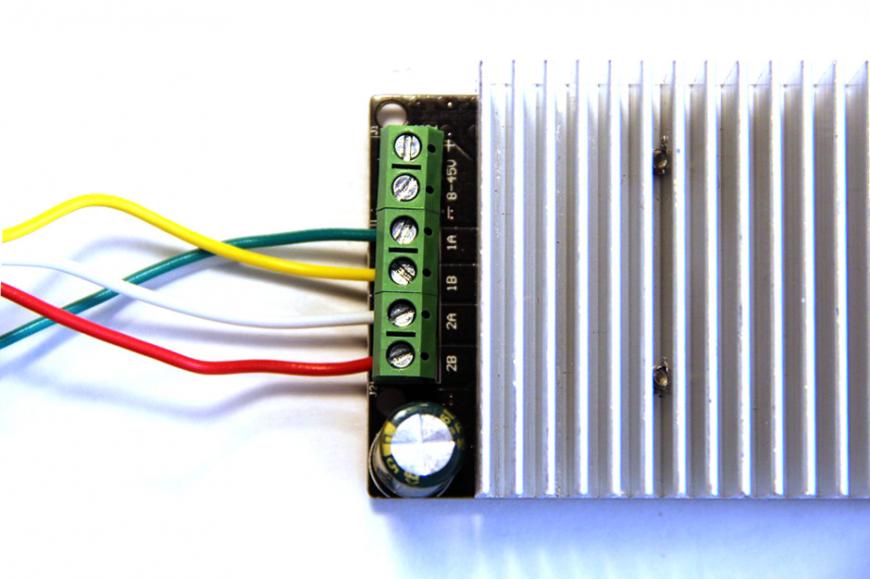
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.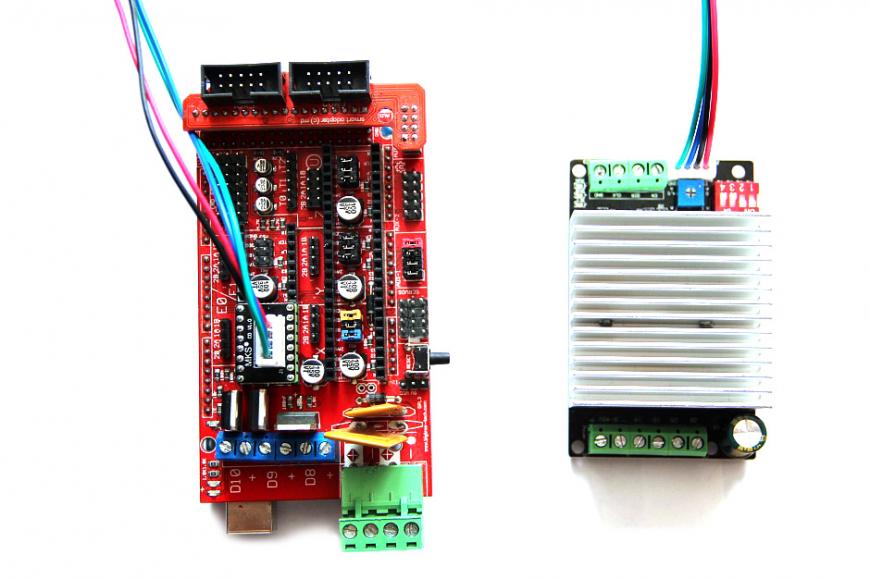 3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.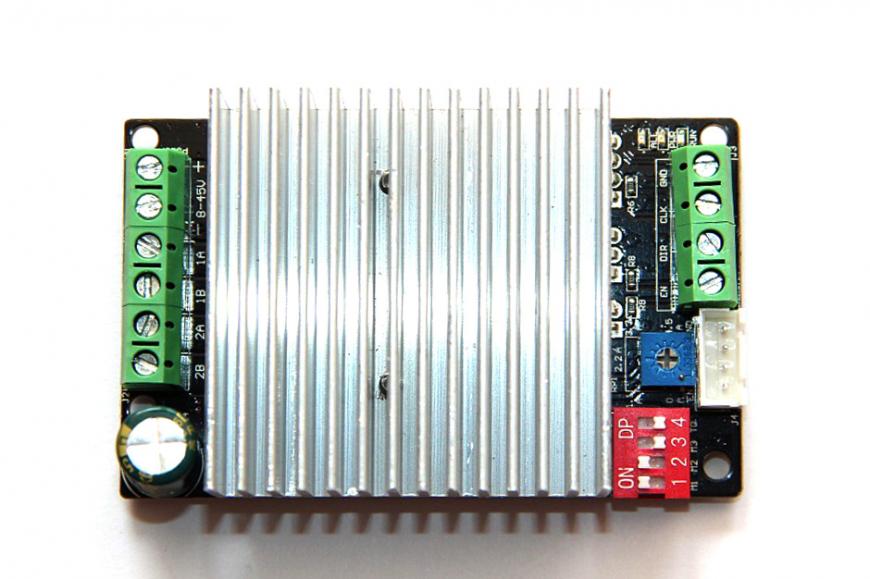
 4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.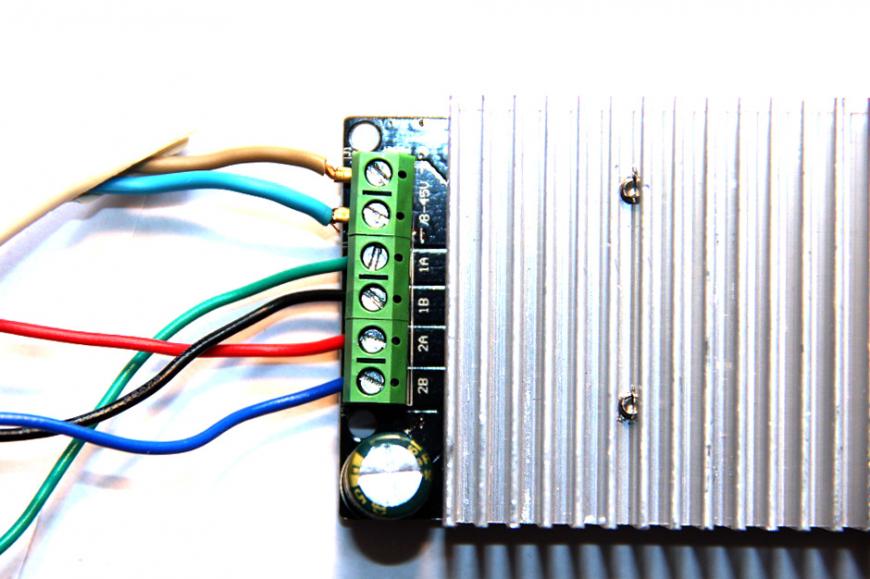 Предыдущие четыре шага на фото ниже.
Предыдущие четыре шага на фото ниже.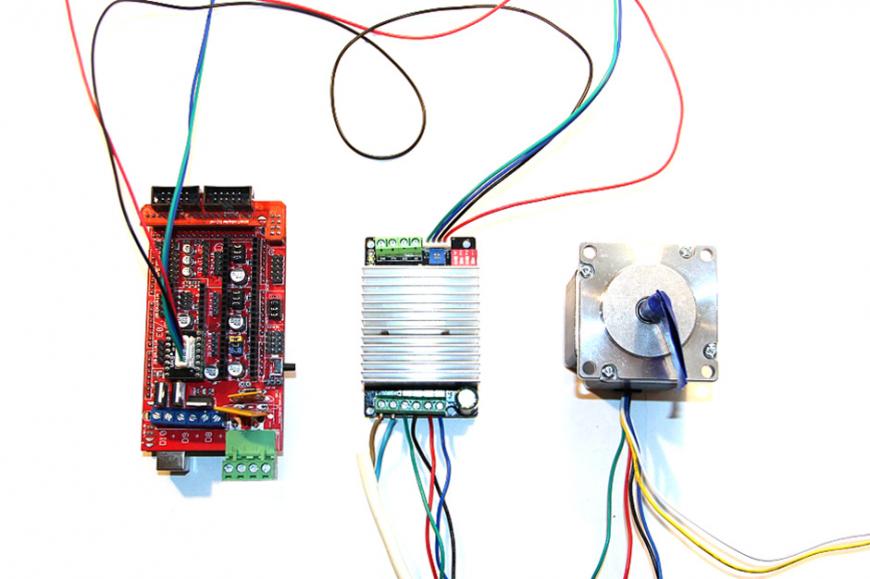 Подключаем LSD дисплей и питание к ramps 1.4.
Подключаем LSD дисплей и питание к ramps 1.4.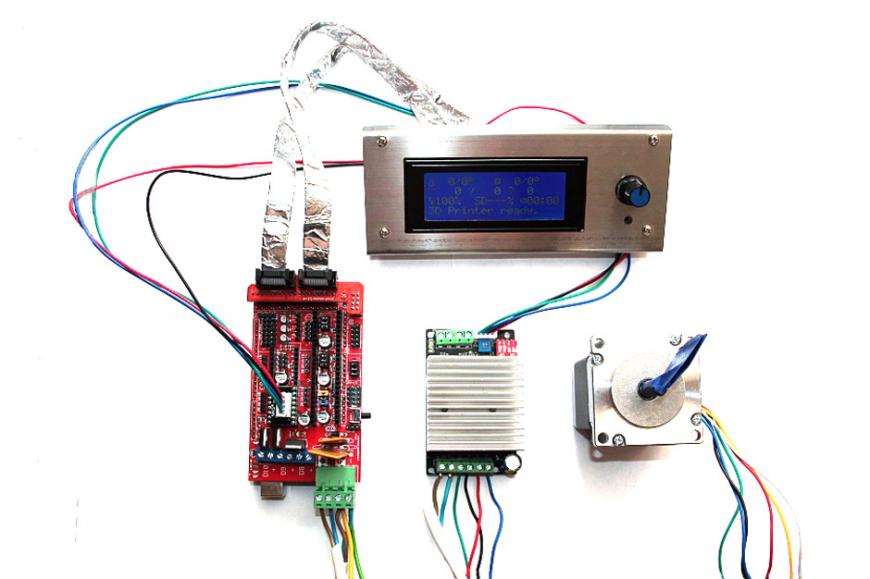
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, желтый в разъём 1B, белый в разъём 2A, красный в разъём 2B. Черный и синий провода лучше заизолировать, не ну если Вам нравится прыгать с бубном то не делайте этого.
 4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.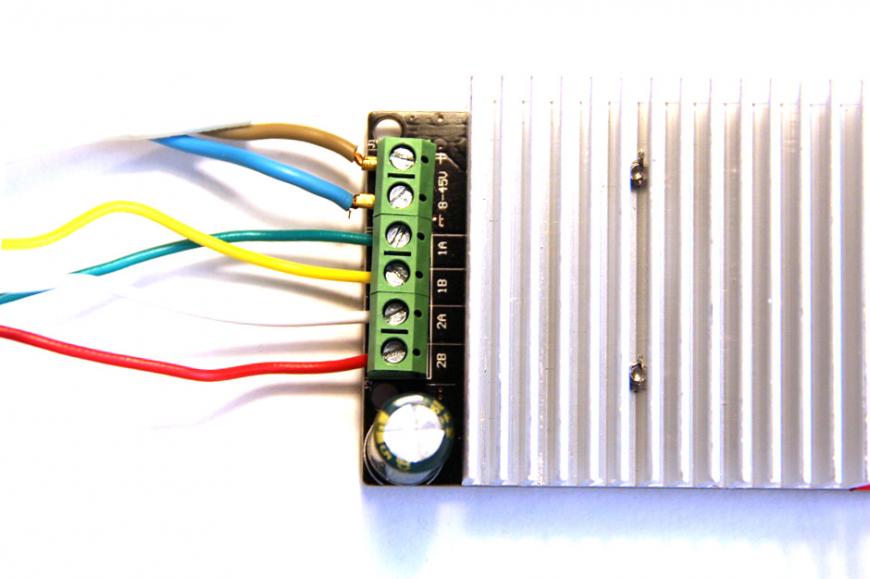 Предыдущие четыре шага на фото ниже.
Предыдущие четыре шага на фото ниже.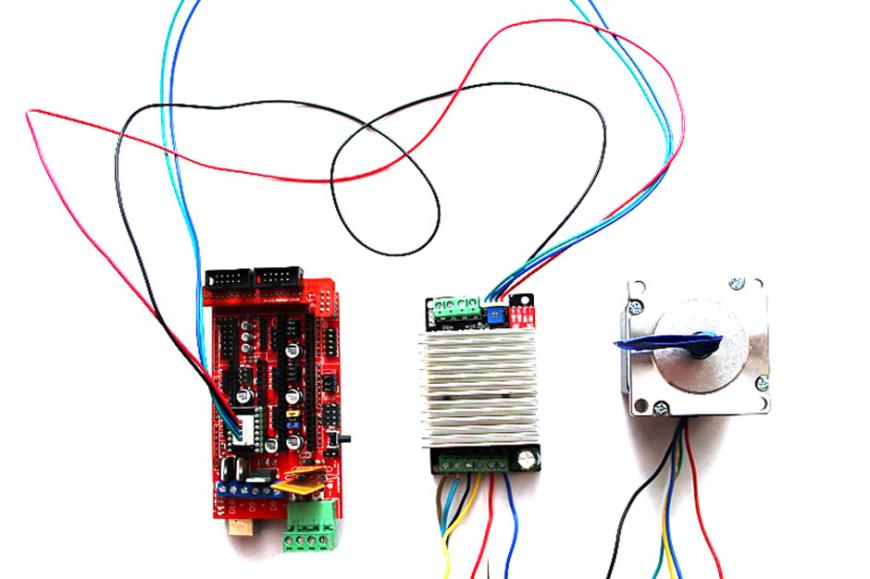 Подключаем LSD дисплей и питание к ramps 1.4.
Подключаем LSD дисплей и питание к ramps 1.4.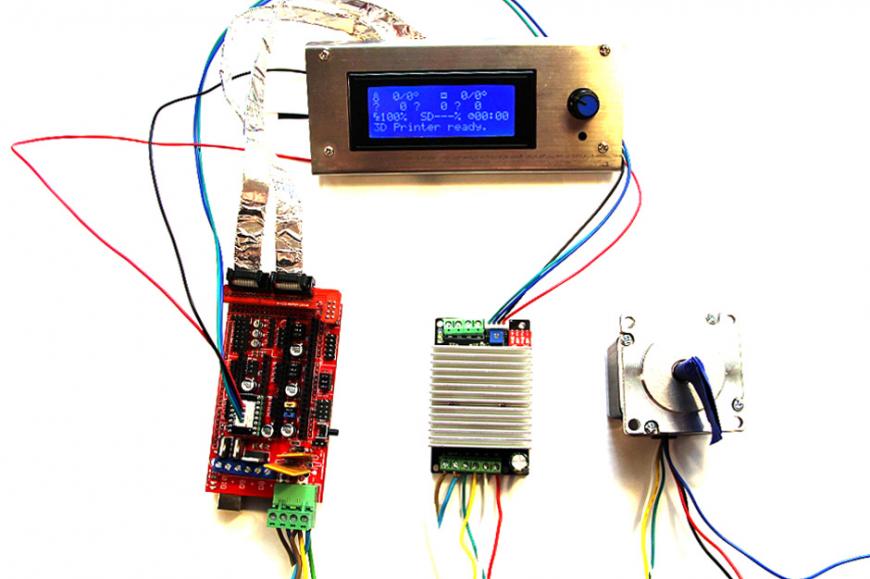
Ссылки на компоненты из статьи.
1. Шаговый двигатель nema 23 57HM56-2006;
2. Драйвер шагового двигателя TB6600;
3. Шилд (надстройка) RAMPS 1.4;
4. Плата управления arduino mega 2560;
5. Плата МКС CD 57/86 для внешнего драйвера;
6. LCD Display 2004 RAMPS 1.4.
З.Ы.

Подключение шагового двигателя: схема подключения
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Подключение шагового двигателя
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами. Каждая из двух фазных обмоток такого электродвигателя имеет пару проводов с непрерывной связью. Драйвер ШД в данном случае подключается пошагово.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам. Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов. Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу. Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов. Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
ВНИМАНИЕ – всегда проверяйте цветовую схему выводов, шаговый двигатель от конкретного производителя отличается от абсолютно аналогичного ШД другого производителя, а значит, может иметь другую цветовую схему выводов!
По вопросу подключения шагового двигателя, вы всегда можете обратиться к нашим специалистам по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.
3D печать для самых новеньких. От А до Я. Шаговики, драйверы и немного магнитного поля.
В продолжение предыдущего поста для начинающих пользователей 3D принтеров.В этот раз расскажу о платах управления, распространенных драйверах для шаговых двигателей и немного теории об их работе. К сожалению, у поста есть предел — 65535 символов, и я уже в них не укладываюсь, что бы описать более подробно распространенные платы управления, поэтому они будут в следующем посте, ровно как и разбор прошивок,положительных сторон и недостатков.
Существующие 3D принтеры выросли из больших станков, у которых позаимствовали кинематику и способ управления, который заключается в том, что бы последовательно передавать координаты для перемещения хотенда. Такой своеобразный метод является общепринятым стандартом для управления станков с ЧПУ (числовым программным управлением). Этот язык программирования называется G-code. Язык своеобразный, и изучать его нет необходимости, перевод модели из графического вида в машинный код для перемещения хотенда по осям и подачи пластика осуществляется в программах-слайсерах. Их я опишу чуть позже, пока же хочу вернуться к физической части принтеров и рассмотреть с помощью чего же можно правильно крутить шаговыми двигателями и получать готовую модель.
1. Платы управления и как они управляют.
Для упрощенного понимания платы стоит разделить на 2 категории по их разрядности. Бывают 8-битные и 32-битные. Первые 3D принтеры, основанные на REPRAP (Replicating Rapid Prototyper — самовоспроизводящийся механизм для быстрого изготовления прототипов) имели в основе распространенную плату для робототехники, ориентированную на непрофессиональных пользователей — Arduino. Для создания прошивки используется собственная бесплатная среда разработки — Arduino IDE.
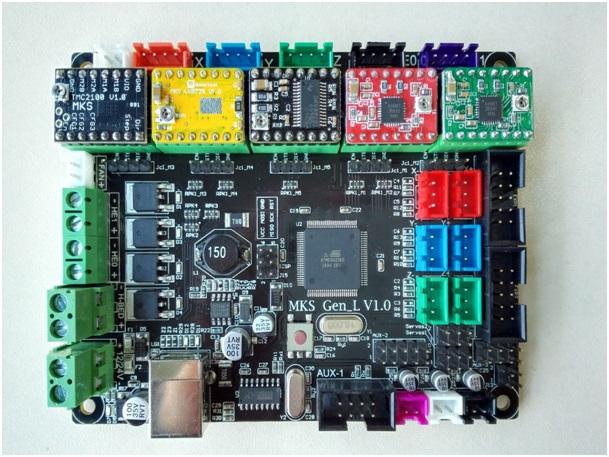
 Arduino и Arduino-совместимые платы спроектированы таким образом, чтобы их можно было при необходимости расширять, добавляя в устройство новые компоненты. Как наиболее мощная была взята плата Arduino Mega 2560 с 8-битным процессором.
Arduino и Arduino-совместимые платы спроектированы таким образом, чтобы их можно было при необходимости расширять, добавляя в устройство новые компоненты. Как наиболее мощная была взята плата Arduino Mega 2560 с 8-битным процессором. 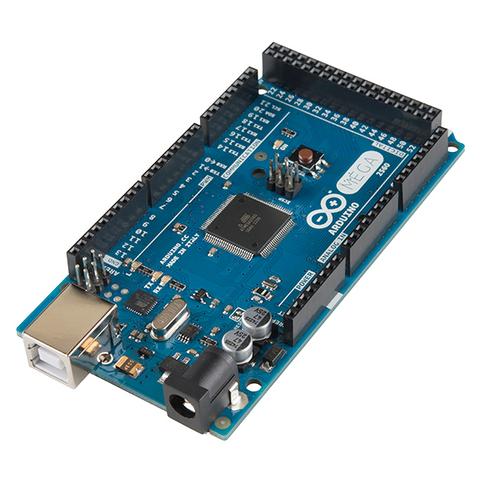 Для расширения ее возможностей, то есть управления нагревом горячего стола (Heat bed), хотенда (Hot end), управления вращением шаговых двигателей, учета нулевого положения с помощью концевых выключателей и прочего была разработана плата расширения RAMPS (RepRap Arduino Mega Pololu Shield).
Для расширения ее возможностей, то есть управления нагревом горячего стола (Heat bed), хотенда (Hot end), управления вращением шаговых двигателей, учета нулевого положения с помощью концевых выключателей и прочего была разработана плата расширения RAMPS (RepRap Arduino Mega Pololu Shield).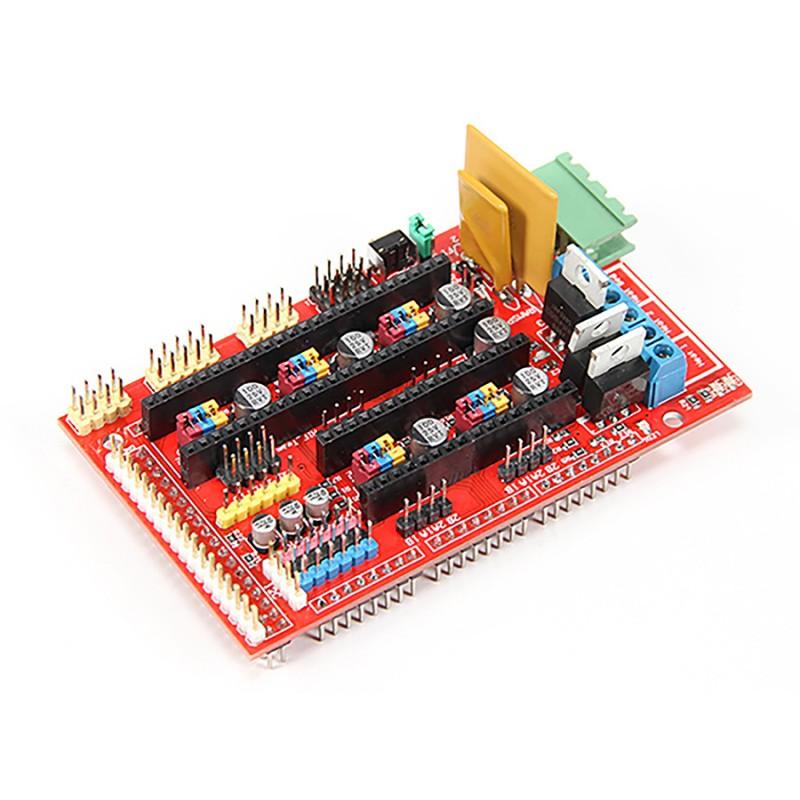 Так же, для управления шаговыми двигателями были разработаны драйвера, совместимые с этой платой (Pololu драйвера).
Так же, для управления шаговыми двигателями были разработаны драйвера, совместимые с этой платой (Pololu драйвера).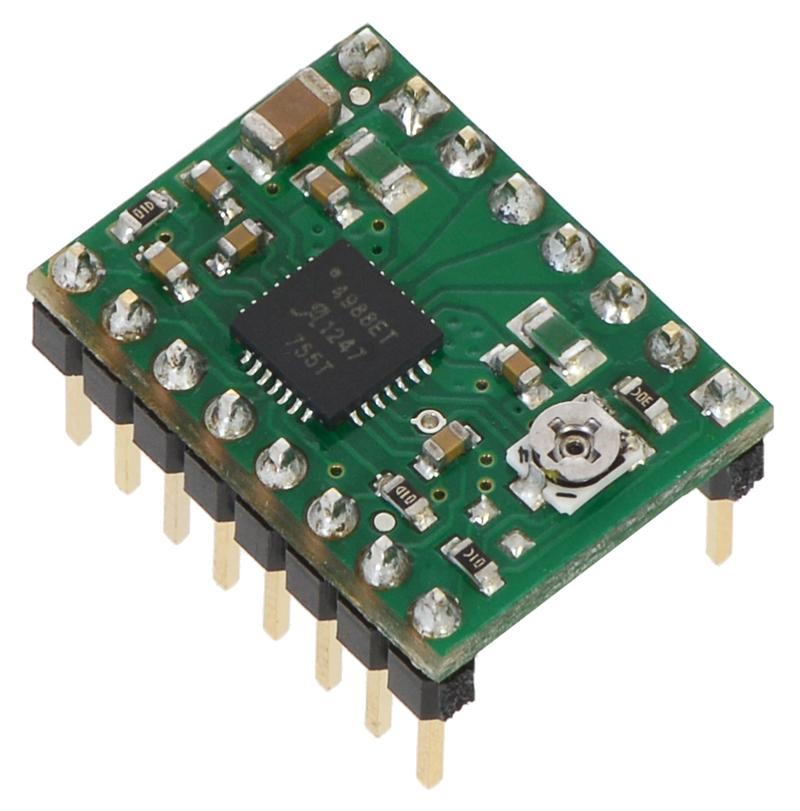 Которые вставляются в гнезда платы. То есть для каждого шагового двигателя, подключаемого к связке Arduino+RAMPS необходим драйвер. RAMPS поддерживает подключение до 5 шаговых двигателей.
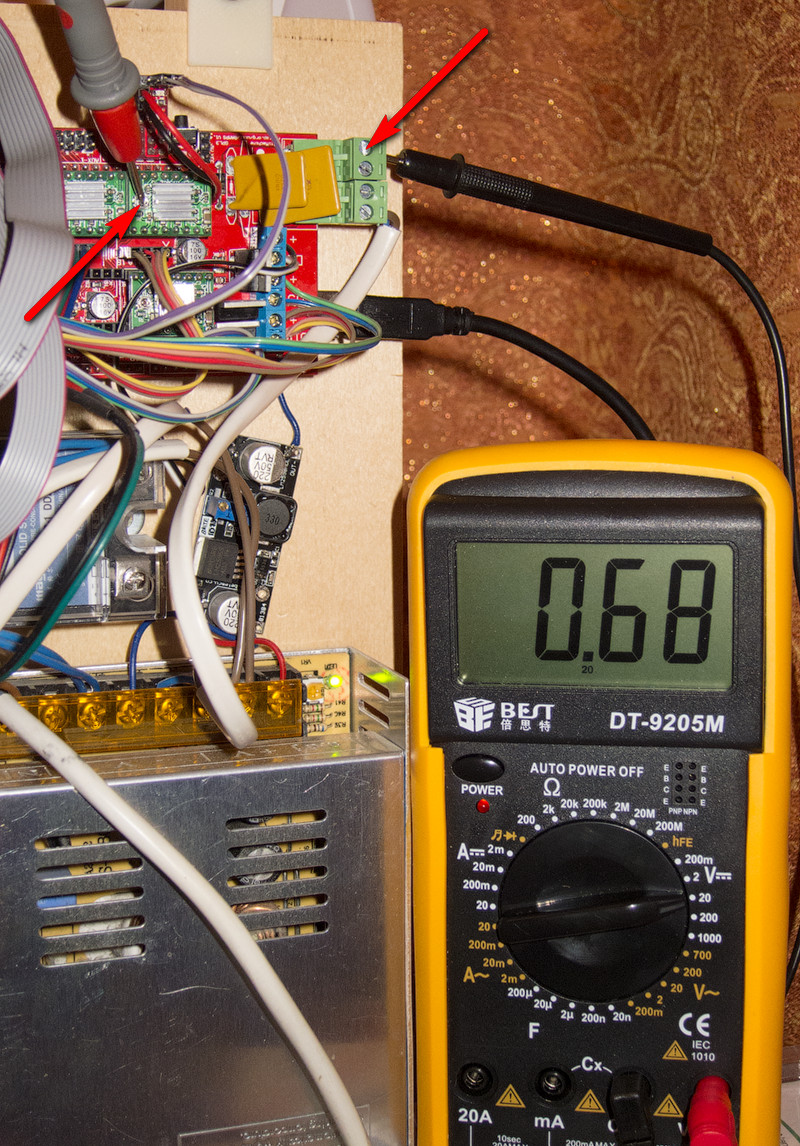
Которые вставляются в гнезда платы. То есть для каждого шагового двигателя, подключаемого к связке Arduino+RAMPS необходим драйвер. RAMPS поддерживает подключение до 5 шаговых двигателей.Для управления шаговым двигателем необходимо настроить напряжение питания двигателя подстроечным резистором. Настройка производится мультиметром в режиме замера постоянного напряжения. Один щуп касается земли ( крайнего контакта на драйвере с надписью GND или же минусового провода от блока питания), другим же коснуться подстроечного резистора.

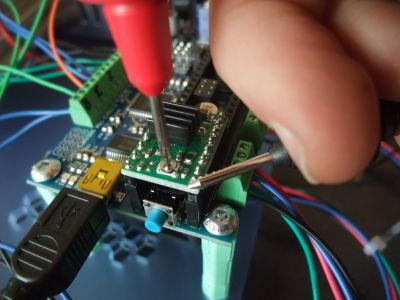 Далее нужно посчитать по формуле необходимое напряжение, исходя из тока, на который рассчитан двигатель.
Далее нужно посчитать по формуле необходимое напряжение, исходя из тока, на который рассчитан двигатель.Vref – пин замера напряжения для установки тока по формуле.
Current Limit – ток шагового двигателя.
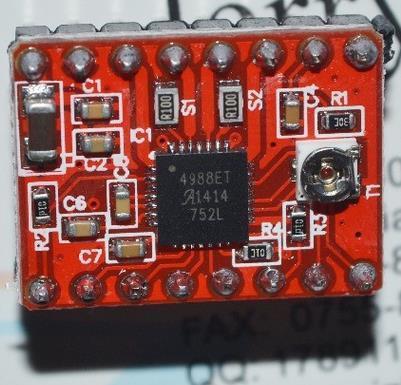
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два чёрных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Current Limit * 8 * (RS)
RS = 0,100
Vref = Current Limit * 8 * 0,100 = Current Limit / 1,25
RS = 0,050
Vref = Current Limit * 8 * 0,050 = Current Limit / 2,5
Например для 17HS4401: Vref = 1,7 / 2,5 = 0,68В
И вращая резистор добиваемся данной цифры на дисплее мультиметра. Важное дополнение, для того, что бы отрегулировать напряжение необходимо выключить принтер, а для замера — включить.
Формулы для других типов драйверов приведены в этой статье.
Другие платы формата All-in-one (все на одной плате, без таких многослойных конструкций) имеют аналогичные колодки под уже ставшими столь распространенными Pololu-драйвера.

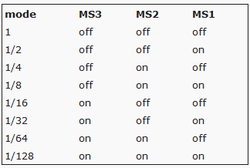
 Так же, для выбора режима работы шагового двигателя между колодками для установки шаговых двигателей сделаны перемычки, замыкая которые мы выбираем тот или иной режим работы.
Так же, для выбора режима работы шагового двигателя между колодками для установки шаговых двигателей сделаны перемычки, замыкая которые мы выбираем тот или иной режим работы.Режимов работы у шагового двигателя с драйверами А4988 всего 5: полный шаг, 1/2 шага, 1/4 шага, 1/8 шага и 1/16.
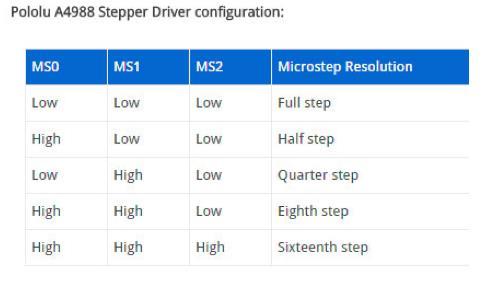 Перемычки всего 3: MS0, MS1, MS2. Low — перемычка отсутствует, high — установлена.
Перемычки всего 3: MS0, MS1, MS2. Low — перемычка отсутствует, high — установлена.Получается, что когда нет ни одной перемычки мотор вращается без деления шага на микрошаги, а когда установлены все 3 — на 1/16.
Дробление шага на микрошаги сделано с единственной целью — увеличения точности перемещения. То есть используя дробление 1/4 шага мы не сможем остановиться посередине между 2 и 3 микрошагом. При 1/16 это возможно.
Существует множество драйверов, совместимых с платами, применяемыми в 3D принтерах. Небольшой список:
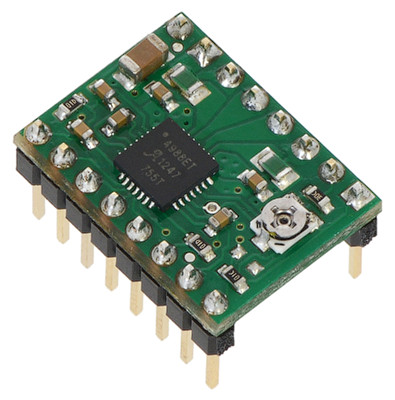
1 ) A4988.
 Могут быть как зеленые, так и красные.
Могут быть как зеленые, так и красные.Максимальный делитель 1/16.
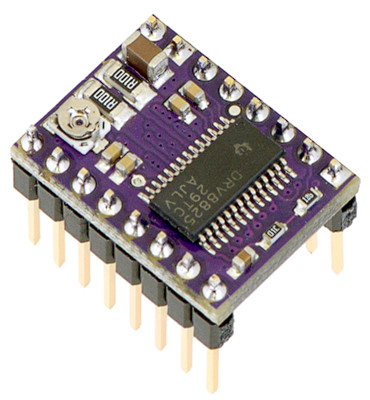
2 ) DRV8825.
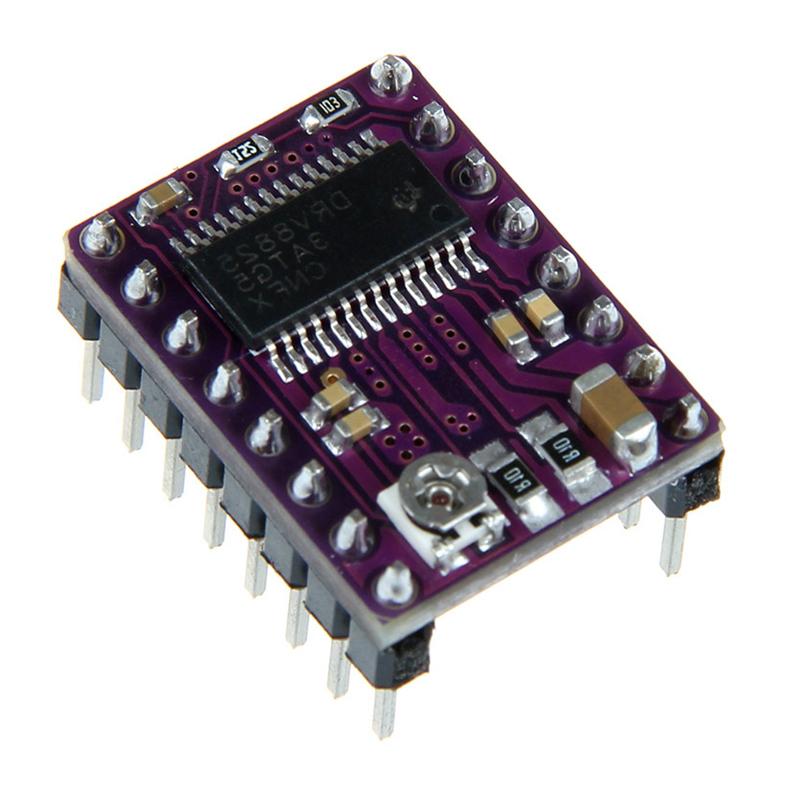 Могут встречаться как фиолетовые, так и синие. Из-за отсутствия нормального режима удержания (в статичном положении, но с фиксацией ротора, обычно этот режим потребляет меньше энергии, чем вращение) сильно греется. Поэтому рекомендуется устанавливать на чип хороший радиатор.
Могут встречаться как фиолетовые, так и синие. Из-за отсутствия нормального режима удержания (в статичном положении, но с фиксацией ротора, обычно этот режим потребляет меньше энергии, чем вращение) сильно греется. Поэтому рекомендуется устанавливать на чип хороший радиатор.Максимальный делитель 1/32.
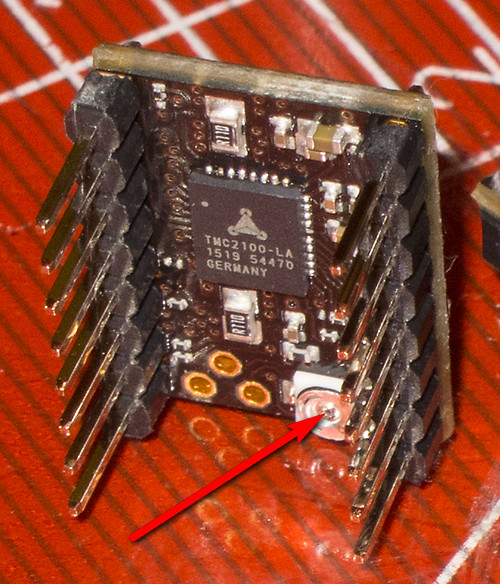
3 ) TMC2100.
 Существует как оригинал, доступный в магазине в Германии и в США, так и множество китайских копий.
Существует как оригинал, доступный в магазине в Германии и в США, так и множество китайских копий.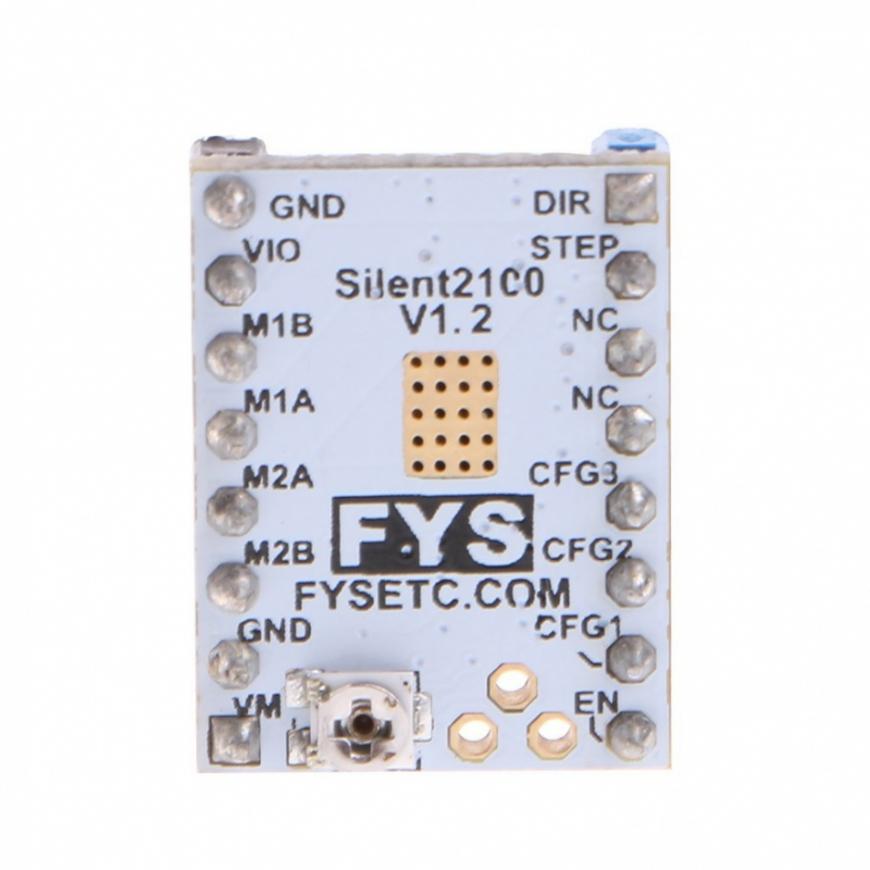
 Чип тот же, производства Германии, а вот обвязку (резисторы, конденсаторы…) каждый китаец ваяет по-своему, поэтому возникает сложность в подборе напряжения для питания шагового двигателя. Данный драйвер позиционируется как тихий, в котором шум и писк двигателей сведен к минимуму.
Чип тот же, производства Германии, а вот обвязку (резисторы, конденсаторы…) каждый китаец ваяет по-своему, поэтому возникает сложность в подборе напряжения для питания шагового двигателя. Данный драйвер позиционируется как тихий, в котором шум и писк двигателей сведен к минимуму. Сравнение шума от А4988 и TMC2100.
Сравнение шума от А4988 и TMC2100.Но как полагается, чем-то нужно жертвовать взамен. Он очень сильно греется, а при перегреве начинаются пропуски шагов и перемещения по осям могут быть неверными.
 У меня в первый раз кубик стал сопляной гусеницей.
У меня в первый раз кубик стал сопляной гусеницей. Как следствие — нужно хорошее охлаждение (некоторые китайцы пренебрегают метализацией для отвода тепла, поскольку чип расположен ‘на пузе’ ) и очень точная регулировка напряжения. Есть и небольшие каверзы — вроде бы точно отрегулировал, печатает который месяц мелкие детали без съездов, а ставишь деталь на сутки-двое, и где-то в конце печати получишь микросъезд на 0,5 мм.
Как следствие — нужно хорошее охлаждение (некоторые китайцы пренебрегают метализацией для отвода тепла, поскольку чип расположен ‘на пузе’ ) и очень точная регулировка напряжения. Есть и небольшие каверзы — вроде бы точно отрегулировал, печатает который месяц мелкие детали без съездов, а ставишь деталь на сутки-двое, и где-то в конце печати получишь микросъезд на 0,5 мм.Драйвер имеет собственный чип, который интерполирует делитель 1/16 в 1/256 без нагрузки для процессора, и обеспечивает очень тихую работу.
4 ) LV8729
Чаще всего драйвер исполнения китайской компании Makerbase (MKS).

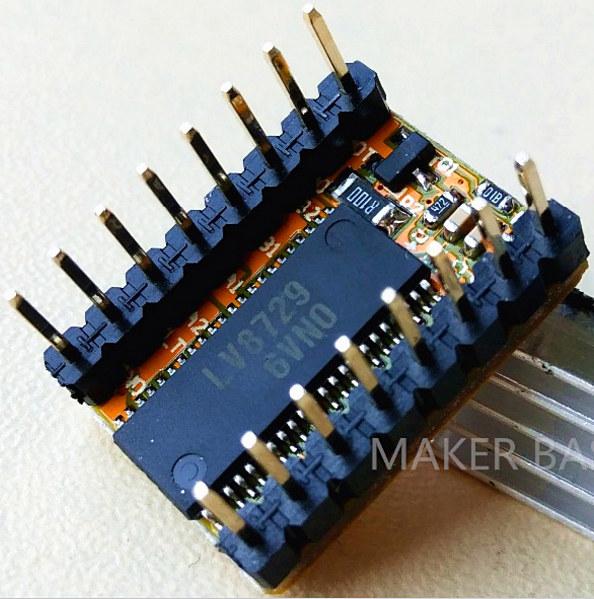 Драйвера характеризуются широкими возможностями регулировки делителя микрошага. От полного до 1/128. Внутреннего делителя, как у ТМС2100 нет.
Драйвера характеризуются широкими возможностями регулировки делителя микрошага. От полного до 1/128. Внутреннего делителя, как у ТМС2100 нет.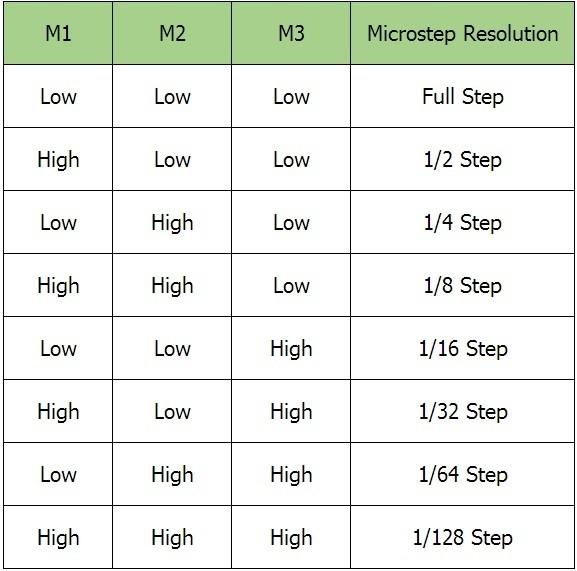 Использовать с 1/64 и 1/128 с 8-битной электроникой (на базе AtMega 2560) не рекомендуется, так как необходимо задействовать очень много ресурсов процессора. Предназначены для установки в 32-разрядные платы.
Использовать с 1/64 и 1/128 с 8-битной электроникой (на базе AtMega 2560) не рекомендуется, так как необходимо задействовать очень много ресурсов процессора. Предназначены для установки в 32-разрядные платы.5 ) SD5984.
 Драйвера производства Panucatt Devices. Продаются только там, китайцы не делают такие. Тоже поддерживают дробление шага от полного до 1/32. Имеется защита от большого тока и перегрева. Как вы заметили на фото, есть 2 ‘лишних’ штырька — драйвера поддерживают регулировку напряжения извне, то есть в прошивке платы. Что очень удобно позволяет контролировать и регулировать напряжение.
Драйвера производства Panucatt Devices. Продаются только там, китайцы не делают такие. Тоже поддерживают дробление шага от полного до 1/32. Имеется защита от большого тока и перегрева. Как вы заметили на фото, есть 2 ‘лишних’ штырька — драйвера поддерживают регулировку напряжения извне, то есть в прошивке платы. Что очень удобно позволяет контролировать и регулировать напряжение. Поставляется в 2 вариантах:
Поставляется в 2 вариантах:1) Стандартная версия. Площадка под пины регулировки напряжения закорочена, и регулировка напряжения возможна как во всех остальных драйверах — руками, в смысле отверткой и мультиметром. Поддерживается всеми платами.
2) Цифровая регулировка. Пины в наличии и регулировка производится программно. Поддерживается только собственными контроллерами: Azteeg X3, X3 PRO и X5 mini V3.
 6 ) SD6128
6 ) SD6128Драйвера так же производства Panucatt Devices.
 В отличие от SD6128 имеют дробление шага до 1/256. Так же, имеется защита от перегрева и большого тока. Аналогично, присутствует в 2 версиях: с ручной регулировкой напряжения, и с поддержкой программной регулировки. Программная регулировка доступна только для плат Azteeg X3, X3 PRO и X5 mini V3.
В отличие от SD6128 имеют дробление шага до 1/256. Так же, имеется защита от перегрева и большого тока. Аналогично, присутствует в 2 версиях: с ручной регулировкой напряжения, и с поддержкой программной регулировки. Программная регулировка доступна только для плат Azteeg X3, X3 PRO и X5 mini V3.В основе драйвера лежит чип THB6128. Драйвер работает как в 3,3В (32-разрядные платы), так и 5В (8-разрядные). Установка делителя производится так же, перемычками, в соответствии с таблицей из pdf-описания.
Для установки в 8-битные платы, задействовать делители выше 1/64 не рекомендуется из-за возможной перегрузки процессора.
7 ) SD8825.
 Собственная версия Panucatt Devices, аналогичная привычной DRV8825, с тем лишь отличием, что есть 2 пина для управления напряжением на драйвере. Регулировка доступна лишь на платах собственного производства: Azteeg X3, X3 PRO и X5 mini V3.
Собственная версия Panucatt Devices, аналогичная привычной DRV8825, с тем лишь отличием, что есть 2 пина для управления напряжением на драйвере. Регулировка доступна лишь на платах собственного производства: Azteeg X3, X3 PRO и X5 mini V3.Делитель 1/32.
8 ) TMC2130.
 Свой опыт использования и покупки я уже описывал. Повторюсь, что если есть желание заморочиться с использованием SPI на плате, и попытаться настроить напряжение — пожалуйста. В распространенную прошивку для 8-битных плат Marlin уже добавлена библиотека для данного драйвера и авторегулировки его напряжения (ток прибавляется до тех пор, пока не появится ошибка о перегреве, далее оно снижается пошагово, с шагом в 50мА), но пока толковых упоминаний об установке и настройке Pololu-драйвера не видел. Единственная реализация, заслуживающая внимания — реализация Джозефа Прюши, на новой MK3. В его новой плате EINSY RAMBO данные драйвера уже впаяны в плату, а прошивка поддерживает регулировку напряжения. Одним из преимуществ данного драйвера является контроль момента на роторе двигателя, то есть в момент касания каретки стопора момент на валу ротора резко увеличивается, и плата понимает, что каретка доехала до максимума и дальше пытаться ее двигать нет смысла. Поэтому там отсутствуют концевые выключатели.
Свой опыт использования и покупки я уже описывал. Повторюсь, что если есть желание заморочиться с использованием SPI на плате, и попытаться настроить напряжение — пожалуйста. В распространенную прошивку для 8-битных плат Marlin уже добавлена библиотека для данного драйвера и авторегулировки его напряжения (ток прибавляется до тех пор, пока не появится ошибка о перегреве, далее оно снижается пошагово, с шагом в 50мА), но пока толковых упоминаний об установке и настройке Pololu-драйвера не видел. Единственная реализация, заслуживающая внимания — реализация Джозефа Прюши, на новой MK3. В его новой плате EINSY RAMBO данные драйвера уже впаяны в плату, а прошивка поддерживает регулировку напряжения. Одним из преимуществ данного драйвера является контроль момента на роторе двигателя, то есть в момент касания каретки стопора момент на валу ротора резко увеличивается, и плата понимает, что каретка доехала до максимума и дальше пытаться ее двигать нет смысла. Поэтому там отсутствуют концевые выключатели.Плата, аналогично с TMC2100, имеет внутренний делитель с 1/16 до 1/256. Переключение между делителями производится программно, по SPI-интерфейсу.
 Появилось достаточно много китайских клонов, в которых SPI-интрефейс запаян, и работа полностью аналогична TMC2100. Как утверждает представитель компании Watterott — разницы между TMC2100 и TMC2130 с запаяным SPI никакой.
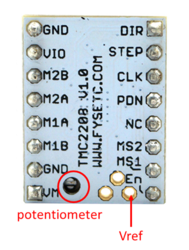
Появилось достаточно много китайских клонов, в которых SPI-интрефейс запаян, и работа полностью аналогична TMC2100. Как утверждает представитель компании Watterott — разницы между TMC2100 и TMC2130 с запаяным SPI никакой.9 ) TMC2208
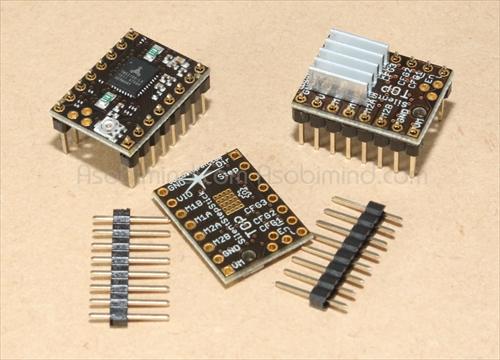
 Новая версия драйверов от Trinamic и Watterott. Конфигурация деления микрошага осуществляется через UART-интерфейс, вот такой платой.
Новая версия драйверов от Trinamic и Watterott. Конфигурация деления микрошага осуществляется через UART-интерфейс, вот такой платой. Плата обеспечивает подключение драйвера через данный интерфейс через кабель к USB компьютера. Далее с помощью собственной утилиты производится конфигурация параметров.
Плата обеспечивает подключение драйвера через данный интерфейс через кабель к USB компьютера. Далее с помощью собственной утилиты производится конфигурация параметров.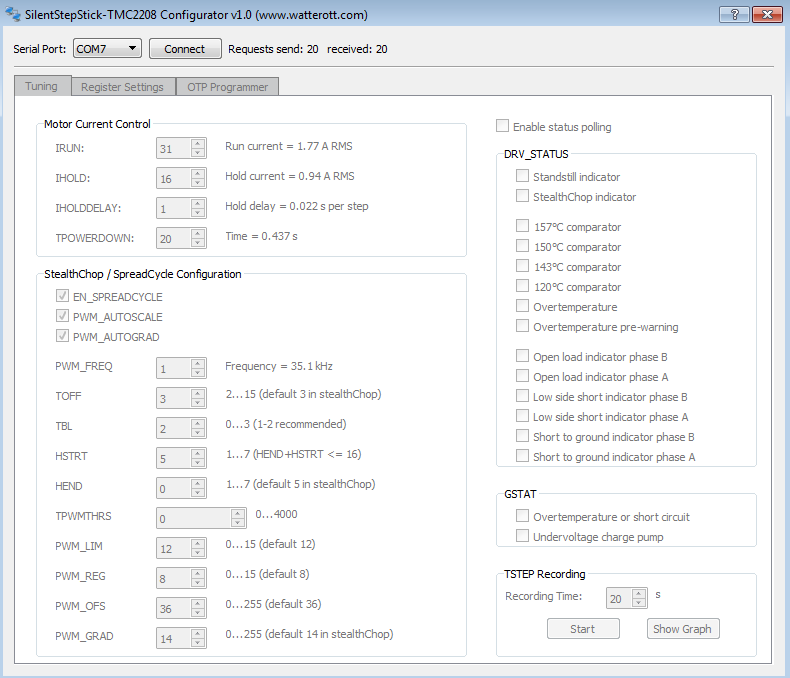 После конфигурирования прошивки плату можно отключить от драйвера.
После конфигурирования прошивки плату можно отключить от драйвера.Уже появились китайские клоны данной платы.
 Приобрел себе такой. Могу сделать единственный вывод — китайские клоны намного капризнее и сложнее в настройке напряжения, нежели оригиналы. Были и BigtreeTech TMC2100 и Makerbase TMC2100 и вот эти blkbox TMC2208, и разумеется оригинальные TMC2100. Настроить китайцев, что б вот прям
Приобрел себе такой. Могу сделать единственный вывод — китайские клоны намного капризнее и сложнее в настройке напряжения, нежели оригиналы. Были и BigtreeTech TMC2100 и Makerbase TMC2100 и вот эти blkbox TMC2208, и разумеется оригинальные TMC2100. Настроить китайцев, что б вот прям У чипа такой же делитель с 1/16 до 1/256, как и у всех остальных TMC2100,2130.
10 ) RAPS128
 Сложно сказать, кто кого повторил, если убрать все стереотипы. Немецкие драйвера, на базе THB6128 ( как и у Panucatt Divices SD6128 ,если верить Wiki REPRAP.org и сайту производителя. Судя по описанию на сайте магазина, где они продаются, немцы не гнушаются ставить и LV8729V, как у китайских MKS LV8729.
Сложно сказать, кто кого повторил, если убрать все стереотипы. Немецкие драйвера, на базе THB6128 ( как и у Panucatt Divices SD6128 ,если верить Wiki REPRAP.org и сайту производителя. Судя по описанию на сайте магазина, где они продаются, немцы не гнушаются ставить и LV8729V, как у китайских MKS LV8729.Драйвер имеет делитель от полного шага до 1/128. Для 8-битных плат не рекомендуется ставить делитель выше 1/32.
 Как очень заметно, выделяется не 1, а 2 потенциометра.
Как очень заметно, выделяется не 1, а 2 потенциометра.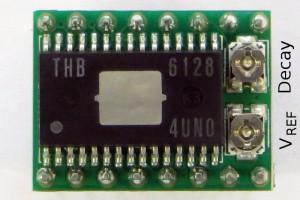 Левый — для настройки напряжения, а правый отвечает за регулировку спада тока. Производитель рекомендует держать положение этого потенциометра где-то посередине, от 1,1 до 3В. В даташите на любые драйвера имеются табличные значения для установки спада тока. Небольшое лирическое отступление.
Левый — для настройки напряжения, а правый отвечает за регулировку спада тока. Производитель рекомендует держать положение этого потенциометра где-то посередине, от 1,1 до 3В. В даташите на любые драйвера имеются табличные значения для установки спада тока. Небольшое лирическое отступление.Представлю небольшую выжимку данной статьи, для понимания принципов работы шаговых двигателей и сложностей управления ими.
Шаговый двигатель. Как он работает и зачем ему спад тока?
Шаговый двигатель – это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Однако шаговые двигатели обладают множеством полезных свойств, а главное — они дешевы.
Чем же хорош шаговый двигатель?
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
- двигатель обеспечивает полный момент в режиме удержания;
- точное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу;
- возможность быстрого старта/остановки/реверсирования;
- надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников;
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи;
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора;
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов;
- шаговым двигателям присуще явление резонанса;
- возможна потеря положения из-за отсутствия обратной связи;
- потребление энергии не уменьшается даже без нагрузки;
- затруднена работа на высоких скоростях;
- невысокая удельная мощность;
- относительно сложная схема управления;
Существуют три основных типа шаговых двигателей:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Нас интересуют гибридные двигатели, наиболее часто применяемые в 3D принтерах.
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении.
 Ротор разделен на две части, между которыми расположен постоянный магнит. Таким образом, зубцы верхней половины ротора являются северными полюсами, а зубцы нижней половины – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор разделен на две части, между которыми расположен постоянный магнит. Таким образом, зубцы верхней половины ротора являются северными полюсами, а зубцы нижней половины – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Ротор привычного для 3D принтера двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Ротор привычного для 3D принтера двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубъев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая – типично 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться осторожно.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Гибридные двигатели подразделяются на 2 типа. В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель (на рисунке ниже под буквой а) имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
 Униполярный двигатель (б) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Униполярный двигатель (б) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.Так какой лучше?
Если сравнивать между собой биполярный и униполярный двигатели, то первый имеет выше удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Наиболее важным является ограничение по нагреву двигателя вследствие омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками.
А как управлять шаговым двигателем?
Существует несколько способов управления шаговым двигателем. Все расписывать не буду, так как они относятся к полношаговым или полушаговым режимам работы. Нас интересует именно микрошаговый режим. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги (Важный ресурс — частота процессора, т.е с какой частотой он может подавать сигнал STEP на перемещение драйверу). Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз. Меняя соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Для реализации микрошагового режима требуются более сложные драйверы, позволяющие задавать ток в обмотках с необходимым соотношением. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется.
 Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. Меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/512. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.
Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. Меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/512. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия. Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.
Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима.
Результатом использования микрошагового режима является более плавное вращение ротора на низких частотах. Для достижения высоких скоростей в микрошаговом режиме требуется высокая частота повторения микрошагов, которую не всегда может обеспечить управляющий микроконтроллер. Именно из-за этого происходит переход от 8-битной электроники к 32-битной, так как в дельта-принтерах для перемещения вдоль одной оси используется движение сразу 3 двигателей.
При осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг положения равновесия. Время установления зависит от характеристик нагрузки и схемы драйвера. Обычно колебания являются нежелательными. Избавиться от этого явления можно используя микрошаговый режим. Ниже показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.
 Видно, что в полношаговом режиме наблюдаются выбросы и колебания, в то время как в микрошаговом режиме их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена путем проведения калибровки и последующей компенсации путем корректировки токов фаз.
Видно, что в полношаговом режиме наблюдаются выбросы и колебания, в то время как в микрошаговом режиме их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена путем проведения калибровки и последующей компенсации путем корректировки токов фаз.При вращении ротора у двигателя есть мертвые зоны, которые ограничивают точность позиционирования.
 На рисунке показана зависимость зависимость момента от угла поворота ротора.
На рисунке показана зависимость зависимость момента от угла поворота ротора.Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны величиной d, то микрошаг величиной менее d вообще не сдвинет ротор с места.
Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и ориентацией магнитного поля статора. Особенно неблагоприятной является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если синхронность работы двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это очень приятный факт.
Каждый раз, когда шаговый двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом минимальный момент имеет в место, когда ротор находится между соседними положениями равновесия.
 Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки.
Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки.Параметры привода зависят от характеристик нагрузки. Кроме трения, реальная нагрузка обладает инерцией. Инерция препятствует изменению скорости и требует от двигателя больших моментов на разгоне и торможении, ограничивая максимальное ускорение. С другой стороны, увеличение инерционности нагрузки увеличивает стабильность скорости.
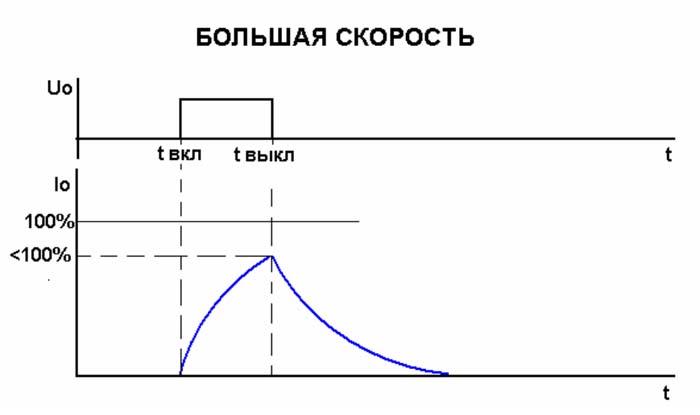
При конструировании драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения(б).
 Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем питания.
Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем питания.Поведение момента при увеличении частоты коммутации фаз примерно такое: начиная с некоторой частоты среза момент монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости.
 Внутренняя кривая (кривая старта) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться.
Внутренняя кривая (кривая старта) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться.Внешняя кривая (кривая разгона) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта кривая пересекает ось скоростей в точке максимальной частоты разгона. Она показывает максимальную скорость для данного двигателя без нагрузки. Область, которая лежит между кривыми, называется областью разгона.
Для того, чтобы работать на большой скорости из области разгона, необходимо стартовать на низкой скорости из области старта, а затем выполнить разгон. При остановке нужно действовать в обратном порядке: сначала выполнить торможение, и только войдя в область старта можно прекратить подачу управляющих импульсов. В противном случае произойдет потеря синхронности и положение ротора будет утеряно.
Необходимо отметить, что непрерывная работа шагового двигателя на высокой скорости не всегда допустима ввиду нагрева ротора.
При осуществлении разгона или торможения важно правильно выбрать закон изменения скорости и максимальное ускорение. Ускорение должно быть тем меньше, чем выше инерционность нагрузки. Критерий правильного выбора режима разгона – это осуществление разгона до нужной скорости для конкретной нагрузки за минимальное время. Чаще всего применяют разгон и торможение с постоянным ускорением.
Реализация закона, по которому будет производится ускорение или торможение двигателя, обычно производится программно управляющим микроконтроллером, так как именно микроконтроллер обычно является источником тактовой частоты для драйвера шагового двигателя. Для генерации тактовой частоты удобно использовать аппаратный таймер, который имеется в составе того же процессора Arduino — Atmega2560. Когда двигатель вращается с постоянной скоростью, достаточно загрузить в таймер постоянное значение периода повторения шагов (длительность шага). Если же двигатель разгоняется или тормозится, этот период меняется с каждым новым шагом. При разгоне или торможении с постоянным ускорением частота повторения шагов должна изменяться линейно, соответственно значение периода, которое необходимо загружать в таймер, должно меняться по гиперболическому закону.
Резонанс
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой ротора двигателя.Когда двигатель совершает шаг, ротор не сразу устанавливается в новую позицию, а совершает затухающие колебания. Дело в том, что система ротор – магнитное поле – статор работает как пружинный маятник, частота колебаний которого зависит от момента инерции ротора (плюс нагрузки) и величины магнитного поля.
Резонансную частоту определяет момент инерции собственно ротора двигателя и момент инерции нагрузки на валу двигателя. Поэтому резонансная частота ротора ненагруженного двигателя, которая приводится среди параметров, имеет маленькую практическую ценность, так как любая нагрузка, подсоединенная к двигателю, изменит эту частоту.
Когда используется не микрошаговый режим, основной причиной появления колебаний является прерывистое вращение ротора. При осуществлении шага ротору толчком сообщается некоторая энергия. Этот толчок возбуждает колебания. Энергия, которая сообщается ротору в полушаговом режиме, составляет около 30% от энергии полного шага. Поэтому в полушаговом режиме амплитуда колебаний существенно меньше. В микрошаговом режиме с шагом 1/32 основного при каждом микрошаге сообщается всего около 0.1% от энергии полного шага. Поэтому в микрошаговом режиме явление резонанса практически незаметно.
Способы изменения направления тока
При работе шагового двигателя требуется изменение направления магнитного поля независимо для каждой фазы. Изменение направления магнитного поля может быть выполнено разными способами. В униполярных двигателях обмотки имеют отвод от середины или имеются две отдельные обмотки для каждой фазы. Направление магнитного поля меняется путем перключения половинок обмоток или целых обмоток. В этом случае требуются только два простых ключа A и B для каждой фазы. В биполярных двигателях направление меняется путем переполюсовки выводов обмоток. Для переполюсовки требуется полный H-мост (рисунок ниже). Управление ключами должно осуществляться логической схемой, реализующей нужный алгоритм работы. Предпологается, что источник питания схем имеет номинальное для обмоток двигателя напряжение.
В биполярных двигателях направление меняется путем переполюсовки выводов обмоток. Для переполюсовки требуется полный H-мост (рисунок ниже). Управление ключами должно осуществляться логической схемой, реализующей нужный алгоритм работы. Предпологается, что источник питания схем имеет номинальное для обмоток двигателя напряжение. После отключения индуктивности от источника питания ток не может мгновено прекратится. Возникает ЭДС (электродвижущая сила) самоиндукции, имеющая противоположное источнику питания направление.
После отключения индуктивности от источника питания ток не может мгновено прекратится. Возникает ЭДС (электродвижущая сила) самоиндукции, имеющая противоположное источнику питания направление.Для регулировки момента нужно регулировать силу тока в обмотках. В любом случае, ток должен быть ограничен, чтобы не превысить рассеиваимую мощность на омическом сопротивлении обмоток. Более того, в полушаговом режиме требуется в определенные моменты обеспечивать нулевое значение тока в обмотках, а в микрошаговом режиме вообще требуется задание разных значений тока.
При работе на больших скоростях требуется увеличивать скорость нарастания тока в обмотках, что возможно повышением напряжения источника питания. При этом максимальный ток обмотки должен быть ограничен резистором.
Еще одним методом стабилизации тока в обмотках двигателя является ключевое (ШИМ) регулирование. Это позволяет использовать простые и дешевые нестабилизированные источники питания.
Падение напряжения на этом резисторе зависит от тока в обмотке. Когда ток достигает установленного значения, ключ выключается, что приводит к падению тока. Когда ток спадает до нижнего порога, ключ снова включается. Этот процесс повторяется периодически, поддерживая среднее значение тока постоянным.
 Управляя Uref можно регулировать ток фазы, например, увеличивать его при разгоне и торможении и снижать при работе на постоянной скорости. Это напряжение мы и регулируем на драйвере подстроечным резистором.
Управляя Uref можно регулировать ток фазы, например, увеличивать его при разгоне и торможении и снижать при работе на постоянной скорости. Это напряжение мы и регулируем на драйвере подстроечным резистором.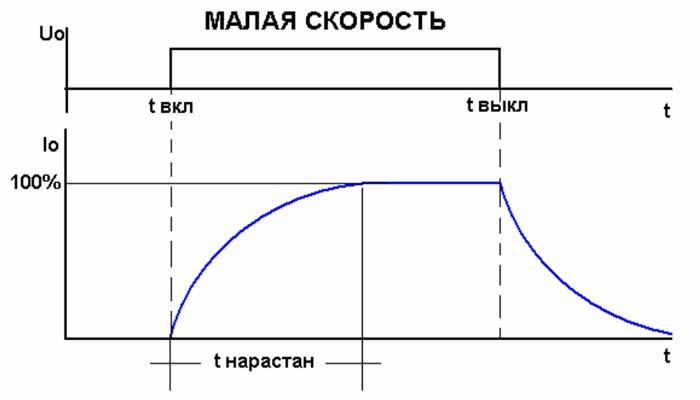
 Подстроечным резистором мы регулируем время включения и выключения ключа, т.е. время на отработку микрошага. У того же А4988 имеется автоматическая регулировка спада тока.
Подстроечным резистором мы регулируем время включения и выключения ключа, т.е. время на отработку микрошага. У того же А4988 имеется автоматическая регулировка спада тока.ПОЛЕЗНО — Шаговые двигатели, характеристики. Драйверы шаговых двигателей, разновидности, настройка.
Продолжу.Драйверы серии TMC2***
TMC2100




TMC2100 — драйвер шагового двигателя, предназначенный для бесшумной или плавной работы за счет интерполяции микрошагов microPlyer. Это означает, что если процессор просит TMC2100 сделать один микрошаг, он делает 16 интерполированных микрошагов на каждый реальный микрошаг. То есть он может сделать 256 микрошагов (16*16) и нет необходимости процессору для вычисления всех 256 микрошагов, драйвер за него это сделает.
Характеристики
Логика совместима с драйвером A4988. Напряжение от 3В до 5В.
Ток до 1,2А (максимально до 2,5А)
Настройки микрошага 1/16 или 1/256
Напряжение для двигателя от 5 до 45В
stealthChop — для бесшумной работы и плавного движения. Чрезвычайно плавное движение является полезным для многих приложений.
spreadCycle — предлагает плавную работу и большую энергетическую эффективность в широком диапазоне скоростей и нагрузок, то есть очень быстрая реакция на изменение скорости и нагрузки двигателя
Чип расположен на нижней части драйвера. Это сделано потому что низ чипа лучше рассеивает тепло. Радиатор нужно устанавливать на печатную плату. Vref регулируется через отверстие в печатной плате.
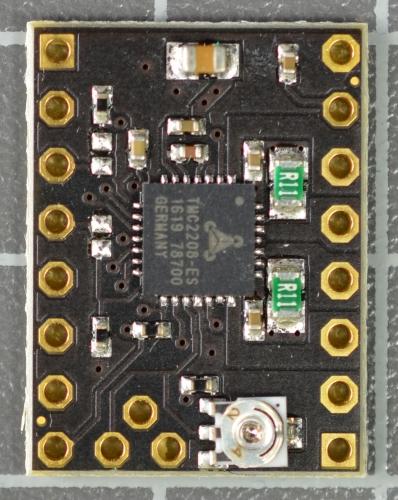
TMC2208
TMC2208 — драйвер шагового двигателя, создан, как более мощная альтернатива TMC2100
Характеристики
Логика совместима с драйвером A4988.
Ток до 2А. Зависит он установленных Rsense
Конфигурации микрошага 1/2, 1/4, 1/8, 1/16. Все они с интерполяцией до 1/256
1/256 без интерполяции только с управлением по UART
Напряжение для двигателя от 4,75 до 36В
Напряжение питания силовой части — 5.5 — 36 В;
Напряжения питания логической части — 3-5 В;
Ток максимальный, с дополнительным охлаждением — 2 A;
TMC2130
ток — 1.2a
Шаг до 256
Напряжение двигателя: 5.5-45 В
Напряжение логики: 3.3-5 В
При использовании в RAMPS1.4 или MKS Gen,снимите третью перемычку
Обратить внимание на положение при установке
Прикрепите теплоотвод, непосредственно к плате
Направление двигателя противоположное к A4988 и drv8825, настройте прошивку или настройте проводку двигателя, если хотите установить вместо A4988.
Настройка тока шаговых двигателей на драйверах TMC2100/TMC2130/TMC2208
термины:
Vref — Напряжение замеряемое вольтметром между пином Vref и GND от 0 до 2,5 вольт.
Irms — Постоянный ток подаваемый на двигатели.
Imax — Пиковый ток подаваемый на двигатели.
Произведем необходимые расчеты:Формула для расчета напряжения Vref из постоянного тока Irms кторый мы хотим задать:
Vref = (Irms * 2.5) / 1.77
Формула для расчета постоянного тока Irms который настроен на драйверах:
Irms = (Vref * 1.77) / 2.5
Зная постоянный ток Irms можно рассчитать пиковый ток Imax:
Imax = Irms * 1.41
А так же можно произвести обратный расчет из пикового тока Imax в номинальный Irms:
Irms = Imax / 1.41
Практические примеры:
Пример 1:
Я хочу подавать постоянный ток 1А, подставим получим формулу:
Vref = (1A * 2.5) / 1.77 = 1.41V
Полученное напряжение необходимо выставить при помощи вольтметра на потенциометре шагового драйвера.
Пример 2:
Мы не знаем какой ток подается на шаговые двигатели и хотим это выяснить.
Нам необходимо замерить Vref на шаговом драйвере, например мы получили 1,1V, подставив полученные данные в формулу получим постоянный ток на котором работают двигатели в данный момент:
Irms = (1.1V * 1.77) / 2.5 = 0.77A
Пример 3:
Шаговые драйверы TMC, в отличии от других, умеют подавать ток в зависимости от текущей нагрузки, так например если нагрузки нет, драйвер будет подавать ток меньше номинального, если нагрузка возрастет он поднимет ток до необходимого уровня для преодоления нагрузки, при этом не превышая значения тока Imax. Допустим у меня есть двигатели с рабочим током 1.5А, я хочу что бы пиковый ток был 1,5А, а постоянный был меньше, что бы двигатели не перегревались.
Пример 4:
Irms = (Vref * 1,77A) / 2,5V
Vref = (Irms * 2,5V) / 1,77A
Current Limit = 1.41 * Irms
Например для 17HS4401: Vref = (Current Limit * 0,707 * 2,5В) / 1,77А = (1,7 * 0,707 * 2,5) / 1,77 = 1,697В
При таком Vref шаговый двигатель возможно будет нагреваться, поэтому Vref придётся подстроить во время работы.
Расчитаем постоянный ток Irms:
Irms = 1.5А / 1.41 = 1.06А
Расчитаем Vref из постоянного тока Irms:
Vref = (1.06А * 2.5) / 1.77 = 1.49v
Важно:
1 — Максимальный постоянный ток для данных драйверов 1.2А.
2 — Измерять Vref можно между либо между потенциометром и GND, либо между пином Vref и GND.
3 — Во время настройки Vref необходимо отключать кабель двигателя во избежании повреждения драйвера.
4 — Для настройки необходимо подавать внешнее питание на шилд, а не на USB ардуины.Настройка Vref на драйверах:Для удобства настройки желательно наличие две пары рук, маленькая плоская отвертка — желательно керамическая, вольтметр.
Вольтметр необходимо установить в измерение постоянного напряжения до 2 вольт.
Первая пара рук настраивает отверткой вольтаж потенциометром постоянно контролируя показания вольтметра.
Вторая пара рук удерживает красный положительный щуп на пин Vref или потенциометр и черный щуп на GND, для удобства GND можно использовать вход на плату с блока питания.
Точки замеров:
TMC2130 TMC2100 TMC2208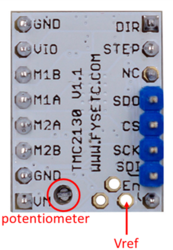

Некоторые моменты которые стоит учитывать:
На практике использование дробления шага 1/32 вместо 1/16 не приводит к увеличению разрешения. Но может приводить к увеличению нагрева драйвера и двигателя, снижению момента двигателя. Не всегда использование 1/32 приведёт и к снижению шума, как в режиме удержания, так и режиме хода.
При дроблении шага уменьшается момент вращения шагового двигателя, что черевато пропуском шагов и не очень хорошо для фрезера.
Правильная настройка тока для шаговых двигателей
Добавлено в закладки: 27
Я сам очень долго не уделял этому вопросу должного внимания. Во первых не хотел разбираться. Во вторых считал, что настройка в рабочих условиях (во время тестовой печати на завышенных режимах) самая правильная. Это конечно верно, но настал момент, когда в моей коллекции появился третий вид драйверов TMC2100 и чтобы их адекватно сравнить с драйверами A4988 нужно их одинаково и правильно настроить по току используемого шагового двигателя.
Что нам даёт правильная настройка тока для шаговых двигателей?
- Снижение шума от работы принтера при завышенном токе
- Избавление от сдвига слоёв (пропуска шагов) при низком токе
- Снижение нагрева шагового двигателя или его драйвера
Какие обычно используют шаговые двигатели?
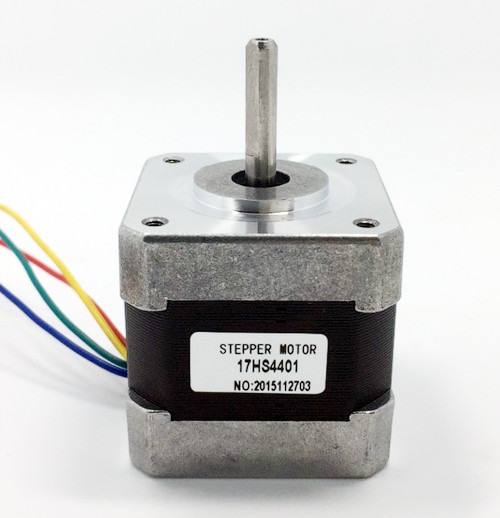
17HS4401 ток 1,7A – обычные
17HS8401 ток 1,8А – более мощные
17HS4402 ток 1,3A – по некоторым сведениям менее шумные, чем 17HS4401
Драйверы шаговых двигателей
A4988 на ток до 2А – очень широко распространён и недорогой
DRV8825 на ток до 2,2А – интересен большей мощностью и микрошагом 1/32
TMC2100 на ток RMS 1,2А (с пиками до 2,5А) – интересен самостоятельным дроблением микрошага 1/16 до 1/255, что в итоге снижает шум работы шагового двигателя не загружая при этом дополнительными расчётами Ардуину.
Видимо для этого драйвера больше подходят двигатели с низким током, например 17HS4402. С этим двигателем драйвер будет меньше нагреваться, а значит его достаточно обдувать низкооборотистым бесшумным вентилятором.
Настройка тока на драйверах ШД
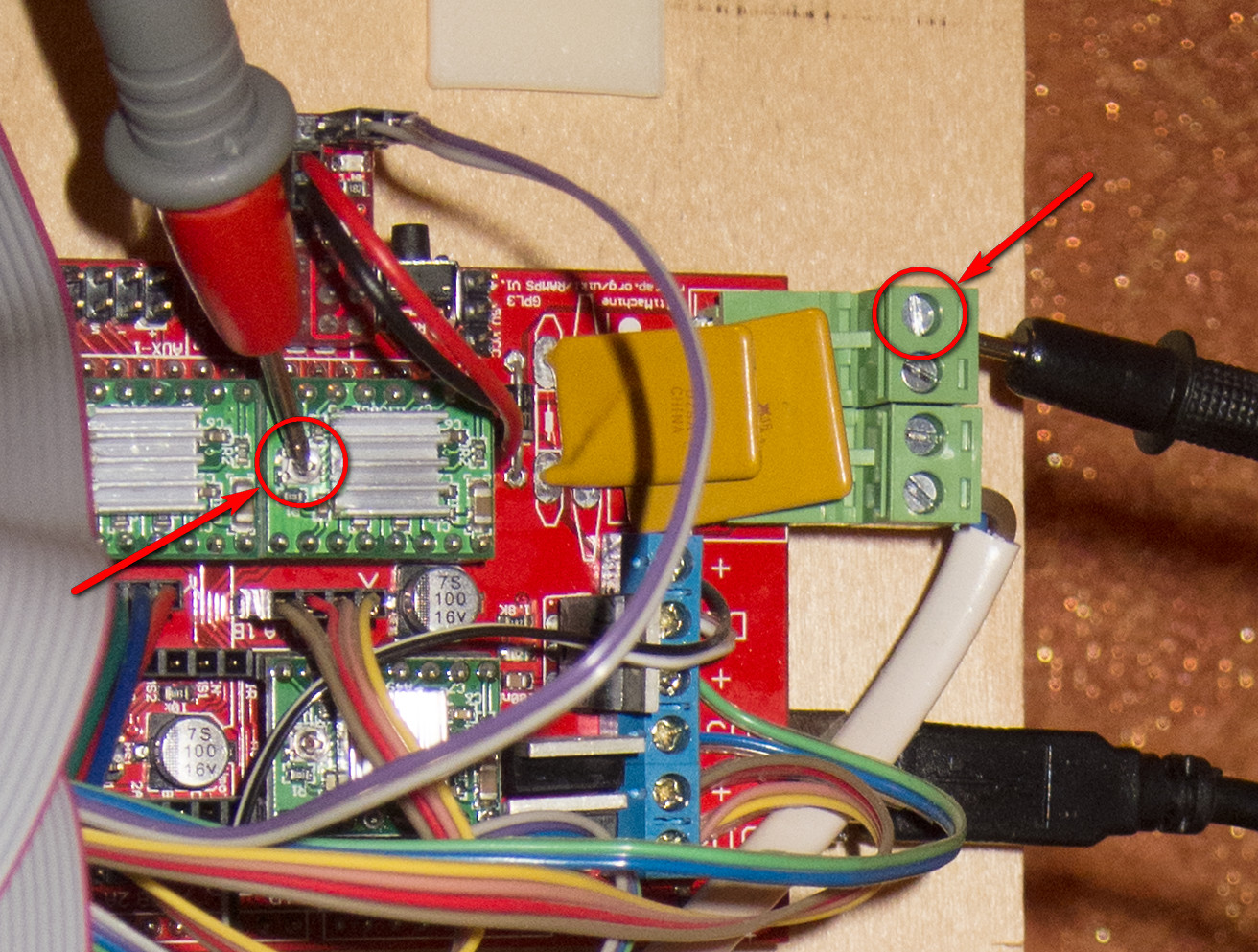
Минусовой щуп мультиметра подсоединяем к контакту GND (минус, он общий), плюсовым прикасаемся к корпусу подстроечного резистора на драйвере. Крутим подстроечный резистор отвёрткой и замеряем расчётное напряжение Vref. Таким образом мы выставляем правильный ток для драйвера шагового двигателя. Для каждого вида драйвера своя формула расчета Vref.
Vref – пин замера напряжения для установки тока по формуле.
Current Limit – ток шагового двигателя.
A4988
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два чёрных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Current Limit * 8 * (RS)
RS = 0,100
Vref = Current Limit * 8 * 0,100 = Current Limit / 1,25
RS = 0,050
Vref = Current Limit * 8 * 0,050 = Current Limit / 2,5
Например для 17HS4401: Vref = 1,7 / 2,5 = 0,68В
DRV8825
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для 17HS4401: Vref = 1,7 / 2 = 0,85В
TMC2100
Irms = (Vref * 1,77A) / 2,5V
Vref = (Irms * 2,5V) / 1,77A
Current Limit = 1.41 * Irms
Например для 17HS4401: Vref = (Current Limit * 0,707 * 2,5В) / 1,77А = (1,7 * 0,707 * 2,5) / 1,77 = 1,697В
При таком Vref шаговый двигатель возможно будет нагреваться, поэтому Vref придётся подстроить во время работы.
В некоторых случаях для снижения нагрева драйвера приходится снижать Vref, а значит для защиты от пропуска шагов нужно уменьшать ускорения в прошивке. Соответственно при снижении ускорений общая скорость печать 3D принтера снижается. Разумный минимум для ускорений 500 мм/с^2. Отсюда вывод: уровень шума можно снизить почти на любом 3D принтере, снижая ускорения и Vref, но при этом Vref придётся подбирать опытным путём.
Сравнение громкости работы двигателя на разных Vref
- Шаговый двигатель Wantai 42BYGHW609 ток 1,7А
- Драйвер A4988
- 3D принтер Mendel90
Тестовый G-код примерно такой (правил в процессе и после)
G21
G90
M107
G28 X0
M117 Run Test…
G1 F12000 X100
G1 F6000 X5
G1 F12000 X100
G1 F6000 X200
G1 F3000 X100
G1 F1500 X5
G1 F3000 X100
G1 F1500 X200
M117 Test Done!
G91
G28 X0
M84
G90
Используем аудиоредактор Audacity. Примитивный микрофон подключен к встроенной аудиокарте ПК. Микрофон прижат к корпусу ШД и сверху обмотан поролоном. Надеюсь этого хватит для регистрации уровня шума.
Vref устанавливаю на 0,58В, запускаю программу из Pronterface и записываю звук с микрофона. Затем повторяю запись на Vref = 0,78В. Картинки уровней громкости складываю в Фотошопе для наглядности сравнения. Вот что получилось:
Красным Vref = 0,58В
Синим Vref = 0,78В

На некоторых скоростях разность в громкости вполне существенная. Такие напряжения взяты для наглядности, хотя и не сильно отличаются. На не настроенном драйвере может стоять любое напряжение Vref!
Пожалуйста не путайте ток с напряжением Vref, когда пишете об этом
Подробнее про эти драйверы можно почитать на сайтах производителей:
https://www.pololu.com/category/120/stepper-motor-drivers
https://github.com/watterott/SilentStepStick/blob/master/docu/FAQ.md
Для более глубокого понимания формул смотрите отдельную тему на форуме по этому вопросу.
Ссылка на обсуждение на форуме методов борьбы с шумом 3D принтера.
Метки: A4988, DRV8825, TMC2100, драйверы  
2016-01-12  
  
Раздел: Настройка, Электроника  
Автор: AKDZG Просмотров: 231 087  
45 комментариев
Настройка тока драйвера шагового двигателя просто и доступно на CNC-Design.ru
Драйвер шагового двигателя является достаточно важным компонентом любого ЧПУ устройства, управляя движением каждой из осей. Перед использованием необходимо убедиться, что они правильно установлены и настроены, чтобы не допустить перегорание шаговых моторов или платы контроллера Arduino Sheild.
Настройку тока драйвера необходимо сделать для решения нескольких достаточно важных моментов:
— уменьшить вероятность пропуска шагов при низком токе;
— снижение нагрева драйвера и шагового двигателя при высоком напряжении;
— снизить шум при высоких значениях тока;
Для настройки тока нам понадобится:
— контроллеры с установленными драйверами;
— драйвера А4988 или DRV8825;
— мультиметр;
— отвертка.
Для начала необходимо собрать и подключить всю систему в полношаговом режиме. После сборки «бутерброда» из контроллера Ардуино, ЧПУ шилда и драйверов шаговых двигателей необходимо подключить шаговые двигатели. В описании к выбранным моторам надо узнать значение максимального тока Imax (для примера у шагового двигателя 17HS8401 это значение 1,8А)
Затем надо рассчитать значение опорного напряжения Vref на переменном резисторе для каждого типа драйверов, у нас их два: А4988 или DRV8825.
Формула опорного напряжения Vref для драйверов отличается.
Расчет для драйвера типа А4988.
Для A4988 формула расчета зависит от номинала резисторов, которые распаяны на плате драйвера. Если присмотреться, то можно увидеть надписи R050 или R100.
На приведенной фотографии они обведены черными кружками, их значение R100.
В общем виде формула выглядит как:
Vref = Imax * 8 * (RS)
Imax — максимальный ток на обмотках двигателя, из описания;
RS — сопротивление резистора, если резистор подписан R100, то RS=0,100, при R050 значение RS=0,05.
Для двигателя из нашего примера 17HS8401
Vref = 1,8 * 8 * 0,100 = 1,44 В.
Из-за того, что рабочий ток двигателя обычно рекомендуется ограничивать в 70% от максимального тока, для уменьшения перегрева двигателя, полученное значение необходимо умножить на 0,7.
Vref= 1,44*0,7 = 1,01 В.
Расчет для драйвера типа DRV8825.
Формула опорного напряжение для данного типа драйвера:
Vref = Imax/2
При рекомендованной работе на 70% от максимального тока двигателя, подставив значения для нашего примера, получим следующие значения:
Vref = 0.7*1,8 / 2 = 0.63V
Настройка тока драйвера на контроллере.
Для настройки необходимо подключить сборку плат к компьютеру,
Включить на мультиметре измерение постоянного напряжения напротив положения «20».
Для измерения напряжения необходимо минусовой щуп приложить к минусу на CNC Sheild, а положительный щуп замкнуть с подстроечным резистором, который по совместительству является «+» в данной схеме.
Необходимо вращать подстроечный резитор, пока мультиметр не покажет требуемое значение напряжения, при вращении по часовой стрелке, значения растут, против часовой стрелки — напряжение падает.
Настройку расчетных значений необходимо повторить это для всех активных драйверов в сборке.
FAQ • Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — электронное устройство, которое заставляет шаговый двигатель «шагать» по сигналам управления. Стандартом де-факто в области управления ШД являются сигналы STEP/DIR/ENABLE. STEP это сигнал шага, DIR это сигнал направления вращения, ENABLE это сигнал включения драйвера.
Более научное определение — драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться).
Управлять ШД намного сложнее чем обычным коллекторным двигателем — нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления ШД разработаны специальные устройства — драйверы ШД. Драйвер ШД позволяет управлять вращением ротора ШД в соответствии с сигналами управления и электронным образом делить физический шаг ШД на более мелкие дискреты.
К драйверу ШД подключается источник питания, сам ШД (его обмотки) и сигналы управления. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Протокол STEP/DIR:
Сигнал STEP — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR — Потенциальный сигнал, сигнал направления. Логическая единица — ШД вращается по часовой стрелке, ноль — ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Протокол CW/CCW:
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE — Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) — драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) — драйвер ШД включен и обмотки ШД запитаны.
Драйверы ШД могут иметь дополнительные функции:
• Контроль перегрузок по току.
• Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
• Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
• Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
• Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
• Схему изменения формы фазовых токов с увеличением частоты (морфинг, переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
• Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.