


Драйвер двигателей (на L293D)
Для управления двигателями робота необходимо устройство, которое бы преобразовывало управляющие сигналы малой мощности в токи, достаточные для управления моторами. Такое устройство называют драйвером двигателей.
Существует много различных схем управления электродвигателями. Они различаются как мощностью, так и элементной базой, на которой они построены.
Остановимся на самом простом драйвере управления двигателями. L293D является одной из самых распространенных микросхем.
L293D содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов.
Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью широтно-модулированного сигнала (ШИМ).
L293D обеспечивает разделение электропитания для микросхемы и для управляемых ею двигателей, что позволяет подключить электродвигатели с большим напряжением питания, чем у микросхемы.
Разделение электропитания микросхем и электродвигателей может быть также необходимо для уменьшения помех, вызванных бросками напряжения, связанными с работой моторов.
Принцип работы каждого из драйверов, входящих в состав микросхемы, идентичен, поэтому рассмотрим принцип работы одного из них.
К выходам OUTPUT1 и OUTPUT2 подключим электромотор MOTOR1.
На вход ENABLE1, включающий драйвер, подадим сигнал (соединим с положительным полюсом источника питания +5V). Если при этом на входы INPUT1 и INPUT2 не подаются сигналы, то мотор вращаться не будет.
Если вход INPUT1 соединить с положительным полюсом источника питания, а вход INPUT2 — с отрицательным, то мотор начнет вращаться.
Теперь попробуем соединить вход INPUT1 с отрицательным полюсом источника питания, а вход INPUT2
— с положительным. Мотор начнет вращаться в другую сторону.
Попробуем подать сигналы одного уровня сразу на оба управляющих входа INPUT1 и INPUT2 (соединить оба входа с положительным полюсом источника питания или с отрицательным) — мотор вращаться не будет.
Если мы уберем сигнал с входа ENABLE1, то при любых вариантах наличия сигналов на входах INPUT1 и INPUT2 мотор вращаться не будет.
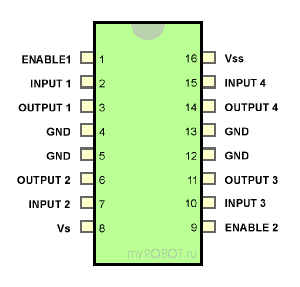
Теперь рассмотрим назначение выводов микросхемы L293D.
Входы ENABLE1 и ENABLE2 отвечают за включение каждого из драйверов, входящих в состав микросхемы.
Входы INPUT1 и INPUT2 управляют двигателем, подключенным к выходам OUTPUT1 и OUTPUT2. Входы INPUT3 и INPUT4 управляют двигателем, подключенным к выходам OUTPUT3 и OUTPUT4.
Контакт Vs соединяют с положительным полюсом источника электропитания двигателей или просто с положительным полюсом питания, если питание схемы и двигателей единое. Проще говоря, этот контакт отвечает за питание электродвигателей.
Контакт Vss соединяют с положительным полюсом источника питания. Этот контакт обеспечивает питание самой микросхемы.
Четыре контакта GND соединяют с «землей» (общим проводом или отрицательным полюсом источника питания). Кроме того, с помощью этих контактов обычно обеспечивают теплоотвод от микросхемы, поэтому их лучше всего распаивать на достаточно широкую контактную площадку.
Характеристики микросхемы L293D:
напряжение питания двигателей (Vs) — 4,5…36V
напряжение питания микросхемы (Vss) — 5V
допустимый ток нагрузки — 600mA (на каждый канал)
пиковый (максимальный) ток на выходе — 1,2A (на каждый канал)
логический «0» входного напряжения — до 1,5V
логическая «1» входного напряжения — 2,3…7V
защита от перегрева
Контроллер двигателя = ATMega8+L293D+DCDC / Habr
Как и обещал, выкладываю силовую часть робота. Она уже встала в шасси на боевое дежурство, так что больше изменений не планируется.
Шасси в сборе
Блок питания.
У нас же стоит свинцовый аккумулятор на 12 вольт, а контроллеру нужно 5 вольт. Вот я и сварганил импульсный блок питания. Можно было, конечно, поставить какой нибудь LM7805 (как у меня на макетке) и на нем сбросить напряжение, но это тупой метод. Дело все в том, что разницу напряжений LM7805 отрыгнет в виде тепла. Так что КПД данного девайса будет ниже 50%, а питание у нас батарейное. Так что выход один — это DC-DC преобразование. В качестве контроллера взял проверенный временем, популярный, доступный и дешевый
Силовой мост L293D
Данная микросхема предназначена для управления двигателем постоянного тока. Содержит в себе четыре мощных усилителя. Если на вход усилка подается 1, то на выход сажается на 12 вольт, если на вход подается 0 то вывод сажается на землю. Таким образом, подавая комбинации 0 и 1 на разные входы, можно сажать выводы двигателя на шины разной полярности, вращая движок в разные стороны.
плата снизу
Плата сверху.
Платы сделаны в домашних условиях методом Лазерного утюга
Управляющий контроллер
Это ATmega8 в данный момент это мозговой контроллер робота. Но со временем я планирую его вывести в переферийный контроллер, отвечающй только за шасси.
Он обрабатывает датчики вращения шестерен на редукторе, а также датчики касания спереди и сзади. Кроме того из него выходят шины i2c и UART, а также все неиспользованные порты. Двигатели работают на ШИМ модуляции.
Полные технические подробности, принципиальная схема, печатная плата в формате Sprint-Layout, фотки в большем разрешении.
Также ссылки по теме:
1) Управление двигателями с помощью ШИМ модуляции
2) Тестовая программа для этого робота. AVRStudio — Assembler
L293D Драйвер двигателей — RadioMart.kz
L293D обеспечивает разделение электропитания для микросхемы и для управляемых ею двигателей, что позволяет подключить электродвигатели с большим напряжением питания, чем у микросхемы. Разделение электропитания микросхем и электродвигателей может быть также необходимо для уменьшения помех, вызванных бросками напряжения, связанными с работой моторов.
Принцип работы каждого из драйверов, входящих в состав микросхемы, идентичен, поэтому рассмотрим принцип работы одного из них.
К выходам OUTPUT1 и OUTPUT2 подключим электромотор MOTOR1.
На вход ENABLE1, включающий драйвер, подадим сигнал (соединим с положительным полюсом источника питания +5V). Если при этом на входы INPUT1 и INPUT2 не подаются сигналы, то мотор вращаться не будет.
Если вход INPUT1 соединить с положительным полюсом источника питания, а вход INPUT2 — с отрицательным, то мотор начнет вращаться.
Теперь попробуем соединить вход INPUT1 с отрицательным полюсом источника питания, а вход INPUT2 — с положительным. Мотор начнет вращаться в другую сторону.
Попробуем подать сигналы одного уровня сразу на оба управляющих входа INPUT1 и INPUT2 (соединить оба входа с положительным полюсом источника питания или с отрицательным) — мотор вращаться не будет.
Если мы уберем сигнал с входа ENABLE1, то при любых вариантах наличия сигналов на входах INPUT1 и INPUT2 мотор вращаться не будет.
Представить лучше принцип работы драйвера двигателя можно, рассмотрев следующую таблицу:
| ENABLE1 | INPUT1 | INPUT2 | OUTPUT1 | OUTPUT2 |
| 1 | 0 | 0 | 0 | 0 |
| 1 | 1 | 0 | 1 | 0 |
| 1 | 0 | 1 | 0 | 1 |
| 1 | 1 | 1 | 1 | 1 |
Теперь рассмотрим назначение выводов микросхемы L293D.
- Входы ENABLE1 и ENABLE2 отвечают за включение каждого из драйверов, входящих в состав микросхемы.
- Входы INPUT1 и INPUT2 управляют двигателем, подключенным к выходам OUTPUT1 и OUTPUT2.
- Входы INPUT3 и INPUT4 управляют двигателем, подключенным к выходам OUTPUT3 и OUTPUT4.
- Контакт Vs соединяют с положительным полюсом источника электропитания двигателей или просто с положительным полюсом питания, если питание схемы и двигателей единое. Проще говоря, этот контакт отвечает за питание электродвигателей.
- Контакт Vss соединяют с положительным полюсом источника питания. Этот контакт обеспечивает питание самой микросхемы.
- Четыре контакта GND соединяют с «землей» (общим проводом или отрицательным полюсом источника питания). Кроме того, с помощью этих контактов обычно обеспечивают теплоотвод от микросхемы, поэтому их лучше всего распаивать на достаточно широкую контактную площадку.
Характеристики микросхемы L293D
- напряжение питания двигателей (Vs) — 4,5…36V
- напряжение питания микросхемы (Vss) — 5V
- допустимый ток нагрузки — 600mA (на каждый канал)
- пиковый (максимальный) ток на выходе — 1,2A (на каждый канал)
- логический «0» входного напряжения — до 1,5V
- логическая «1» входного напряжения — 2,3…7V
- скорость переключений до 5 kHz.
- защита от перегрева
Комплект поставки и внешний вид данного товара могут отличаться от указанных на фотографиях в каталоге интернет-магазина.
Ещё пара слов про L293 / Электроника / RoboCraft. Роботы? Это просто!
Когда-то, уважаемый noonv уже познакомил нас с микросхемой L293D. Попробую прояснить некоторые мелкие моменты связанные с её применением, которые были опущены в его статье.
Правда для слитности придётся немножко побыть Кэпом и несколько повториться =\
Как и говорили, L293, содержит четыре полумостовых драйвера. Каждый из них может использоваться для управления достаточно мощной нагрузкой, индуктивной в том числе, а значит подходит и для моторчиков=)
Если присмотреться, то увидим, что каждый драйвер состоит из двух транзисторов, (это,
конечно весьма упрощённо=). Встроенные диоды имеются только у микросхем с индексом “D”
Если на выходе входе “разрешения” (EN) лог.1. то работа соответствующих драйверов
разрешена: Когда на вход драйвера подаётся лог.0 — открывается нижний транзистор и нагрузка окажется подключенной на “землю”. Если лог.1 то откроется верхний и на нагрузку пойдёт всё питание, что мы приложили к 3 ноге.
Если же подать на EN лог.0, то выходы соответствующих драйверов отключатся — перейдут в “высокоимпедансное состояние” и что там у них на входах станет совсем неважно.
А если подавать на вход драйвера ШИМ-сигнал — можно управлять током нагрузки.
Если ШИМ-ить сигнал EN (при 1 на входах соот. драйверов) будем управлять током двух нагрузок сразу.
Четыре мотора на одну ЭЛЬ-ку!
Таким образом каждый (из четырёх) драйверов может управлять током через нагрузку только в одном направлении – регулировать скорость вращения можно, но вот изменять направление не получится=( Зато подключить можно — целых четыре моторчика!
Одним из этих способов:
Первый двигатель, включен относительно питания – вертеться будет при 0 на входе, второй относительно земли – вертится при 1.
Про торможение.
А вот если на первый подать 1, то мотор окажется, подключен обоими выводами на питание – закорочен, будет, практически – в этом состоянии вал двигателя интенсивно тормозится. Электродинамически=)
Происходит это от того, что двигатель, как и многие электрические машины, обратим – т.е. легко превращается в генератор. Вращаясь по инерции, но начинает вырабатывать дармовую электроэнергию и с радостью спускает её в атмосферу в виде тепла, обильно расходуя запасённую массивным ротором механическую энергию.
Если же работа драйвера запрещена (EN — 0) – мотор отключен – вал свободно крутится.
Так он остановиться несколько медленнее, чем при торможении.
Тоесть ШИМить надо, именно, вход EN
Иначе, в паузах между импульсами, двигатель будет растрачивать инерцию ротора не только на полезную нагрузку но и на преодоление бесполезного (в данном случае) момента торможения полем самоиндукции.
Но в одну сторону этож неинтересно!
Чтоб ток мог течь в обе стороны придется собрать полный мост – и отдать каждому мотору уже по два драйвера=\
Тут практически всё тоже самое — один драйвер подключает “минус” моторчика к земле, другой драйвер — “плюс” – к питанию – вал крутится в одну сторону.
Меняем состояние входов на противоположное – происходит реверс.
Ну а когда оба вывода подключаются в одно и тоже “место” (на землю или на питание), начинается электродинамическое торможение.
Опять же, видим, что правильней ШИМить вход EN.
И тут становится понятно, зачем он один на два драйвера – очень удобно=)
Про потери и тепловой режим
Если внимательно посмотреть схему драйверов, можно заметить, что транзисторы в ЭЛЬ-ке не полевые, (как это уже повсеместно принято в подобных случаях) а самым наглым образом биполярные. Следует из этого то, что в открытом состоянии сопротивление их к нулю не сильно стремится (а вот у полевиков — миллиомы, за это их везде и любят), и падает на них приличное напряжение 1.5-2В. Отрыгиваются эти вольты в виде тепла и микросхема греется=( Соответственно нужен теплоотвод о чём недвусмысленно намекает датащит.
Следует помнить, что процесс торможения также идёт через открытые транзисторы драйверов и почти всё тепло и в этом случае выделяется на микросхеме. Так что, если двигатель у вас крупный (или его нагрузка обладает большой инерцией), работает с частыми стартостопами, ЭЛЬ-ка на пределе тока или теплоотвод не очень налажен, стоит задуматься — а так ли важен выбег при остановке?=)
Но, несмотря на все это микросхема очень даже хорошая=)
Четырехканальный H-мостовой драйвер L293x — DataSheet
1. Функции
- Широкий диапазон напряжения питания от 4.5 В до 36 В
- Отдельный вход источника питания для логической части
- Внутренняя защита от электростатического разряда
- Входы с высоким уровнем помехоустойчивости
- Возможность выходного тока на канал – 1 A (600 мА для L293D)
- Пиковый выходной ток на канал – 2 А (1.2 A для L293D)
- Выходные ограничительные диоды для подавления индуктивных переходных процессов (L293D)
2. Применение
- Драйверы для шаговых двигателей
- Драйверы для двигателей постоянного тока
- Драйверы для фиксации состояния реле
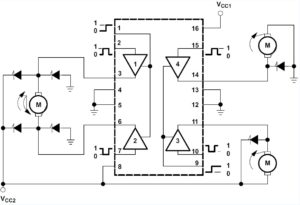
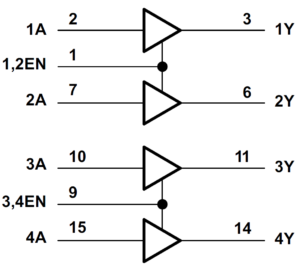 Логическая схема ИС L293D, L293DD
Логическая схема ИС L293D, L293DD
3. Описание
Интегральная схема L293 и L293D – это сильноточный четырехканальный H-мостовой драйвер. L293 предназначена для обеспечения двунаправленных токов привода до 1 А при напряжениях от 4,5 В до 36 В. L293D предназначена для обеспечения двунаправленных токов привода до 600 мА при напряжениях от 4,5 В до 36 В. Оба устройства предназначены для управления индуктивными нагрузками, такими как реле, соленоиды, двигатели постоянного тока и биполярные шаговые двигатели, а также других сильноточных/высоковольтных нагрузок с применением положительного питания.
Каждый выход представляет собой полную бестрансформаторную схему двухтактного усилителя со стоком на транзисторе Дарлингтона и истоком на комплементарном транзисторе Дарлингтона. Драйверы включаются парами, для входов драйверов 1 и 2 активируется вход 1,2EN, а для входов драйверов 3 и 4 активируется вход 3,4EN.
Диапазоны рабочих температур для L293 и L293D находятся в пределах от 0 °C до 70 °C.
Информация об устройстве(1)
| Партномер | Корпус | Размер микросхемы |
| L293NE | PDIP (16) | 19.80 мм × 6.35 мм |
| L293DNE | PDIP (16) | 19.80 мм × 6.35 мм |
(1)Для всех доступных корпусов см. заказываемое дополнение в конце технической документации.
4. Конфигурация контактов и функции
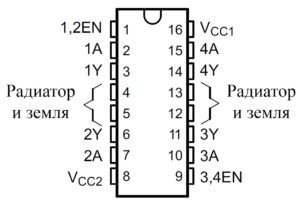 Внешние вид и назначение контактов ИС L293, L293D в 16-выводном корпусе PDIP и NE (вид сверху)
Внешние вид и назначение контактов ИС L293, L293D в 16-выводном корпусе PDIP и NE (вид сверху)
| Вывод | Обозначение | Описание | |
| Название | Номер | ||
| 1,2EN | 1 | I | Включение (разрешение работы) каналов драйвера 1 и 2 (активный высокий вход) |
| <1:4>A | 2, 7, 10, 15 | I | Входы драйвера, неинвертирующие |
| <1:4>Y | 3, 6, 11, 14 | O | Выходы драйвера |
| 3,4EN | 9 | I | Включение каналов драйвера 3 и 4 (активный высокий вход) |
| GROUND | 4, 5, 12, 13 | — | Выводы заземления устройства и радиатора. Подключить к заземленной плоскости печатной платы с несколькими прочными сквозными отверстиями |
| VCC1 | 16 | — | Напряжение питания для внутренней логической части 5 В |
| VCC2 | 8 | — | Напряжение питания для силовой части драйверов от 4.5 до 36 В |
5. Характеристики
5.1 Абсолютные максимальные значения
свыше диапазона рабочей температуры воздуха (если не указано иное)(1)
| Параметры | Мин. | Макс. | Ед. изм. |
| Напряжение питания, VСС1(2) | — | 36 | В |
| Выходное напряжение питания, VСС2 | — | 36 | В |
| Входное напряжение, Vi | — | 7 | В |
| Выходное напряжение, Vo | -3 | VСС2 +3 | В |
| Пиковый выходной ток, Io (не повторяющийся, t ≤ 5 мс): L293 | -2 | 2 | А |
| Пиковый выходной ток, Io (не повторяющийся, t ≤ 100 мкс): L293D | -1.2 | 1.2 | А |
| Непрерывный выходной ток, Io: L293 | -1 | 1 | А |
| Непрерывный выходной ток, Io: L293D | -600 | 600 | мА |
| Максимальная температура кристалла, Tj | — | 150 | °C |
| Температура хранения и кристалла, Tstg | -65 | 150 | °C |
(1)Напряжения, выходящие за пределы, указанные в Абсолютных максимальных значениях, могут повредить ИС. Это только значения напряжения, которые не подразумевают функциональную работу ИС в этих или любых других условиях, помимо тех, которые указаны в п. 5. 3 «Рекомендуемые условия эксплуатации». При воздействии абсолютных максимальных значений на длительные периоды может повлиять на надежность ИС.
(2)Все значения напряжения относительно вывода земли сети.
5.2 Значения электростатического разряда
| Значение | Ед. изм. | ||
| V(ESD) Электростатический разряд | Модель человеческого тела (HBM), согласно ANSI/ESDA/JEDEC JS-001(1) | ±2000 | В |
| Модель заряженного устройства (CDM), согласно JEDEC спецификация JESD22-C101(2) | ±1000 | ||
(1)В документе JEDEC JEP155 указано, что модель человеческого тела (HBM) при напряжении 500 В обеспечивает безопасное производство со стандартным процессом контроля электростатического разряда (ESD).
(2)В документе JEDEC JEP157 указано, что модель заряженного устройства (CDM) при напряжении 250 В обеспечивает безопасное производство со стандартным процессом контроля электростатического разряда (ESD).
5.3 Рекомендуемые условия эксплуатации
свыше диапазона рабочей температуры воздуха (если не указано иное)
| Мин. | Ном. | Макс. | Ед. изм. | |||
| Напряжение питания | VCC1 | 4.5 | — | 7 | В | |
| VCC2 | VCC1 | — | 36 | |||
| VIH | Входное напряжение высокого уровня | VCC1 ≤ 7 В | 2.3 | — | VCC1 | В |
| Vcc1 ≥ 7 В | 2.3 | — | 7 | В | ||
| VIL | Входное напряжение низкого уровня | -0.3(1) | — | 1.5 | В | |
| TA | Эксплуатационная температура свободного воздуха | 0 | — | 70 | °C | |
(1)Алгебраическое соглашение, в котором наименьший положительный (самый отрицательный) обозначенный минимум, применяется в этой технической документации для логических уровней напряжения.
5.4 Тепловые характеристики
| Тепловые измерения(1) | L293, L293D | Ед. изм. | |
| NE (PDIP) | |||
| 16 контактов | |||
| RθJA | Тепловое сопротивление кристалл-окружающая среда(2) | 36.4 | °C/Вт |
| RθjC(top) | Тепловое сопротивление кристалл-корпус (верхняя часть) | 22.5 | °C/Вт |
| RθJB | Тепловое сопротивление кристалл-печатная плата | 16.5 | °C/Вт |
| ΨJT | Параметр характеристики кристалл-верхняя часть | 7.1 | °C/Вт |
| ΨJB | Параметр характеристики кристалл-печатная плата | 16.3 | °C/Вт |
(1)Более подробную информацию о стандартных и новых тепловых измерениях (характеристиках) см. в документе о применении Semiconductor and IC Package Thermal Metrics, SPRA
(2)Тепловой импеданс (или полное тепловое сопротивление) упаковки рассчитывается в соответствии с JESD 51-7
5.5 Электрические характеристики
свыше диапазона рабочей температуры воздуха (если не указано иное)
| Параметры | Условия испытаний | Мин. | Ном. | Макс. | Ед. изм. | |||
| VOH | Выходное напряжение высокого уровня | L293: Ioh = — 1 A | VCC2 – 1.8 | VCC2 – 1.4 | — | В | ||
| L293D: IOH = — 0.6 A | ||||||||
| VOL | Входное напряжение низкого уровня | L293: IOL = 1 A | — | 1.2 | 1.8 | В | ||
| L293D: IOL = 0.6 A | ||||||||
| VOKH | Выходное напряжение фиксатора высокого уровня | L293D: IOK = — 0.6 A | — | VCC2 + 1.3 | — | В | ||
| VOKL | Выходное напряжение фиксатора низкого уровня | L293D: IOK = 0.6 A | — | 1.3 | — | В | ||
| IIH | Входной ток при высоком уровне напряжения | A | VI = 7 В | — | 0.2 | 100 | мкА | |
| EN | — | 0.2 | 10 | |||||
| IIL | Входной ток при низком уровне напряжения | A | VI = 0 | — | -3 | -10 | мкА | |
| EN | — | -2 | -100 | |||||
| ICC1 | Ток питания логической части | Io = 0 | Все выходы в состоянии высокого уровня | — | 13 | 22 | мА | |
| Все выходы в состоянии низкого уровня | — | 35 | 60 | |||||
| Все выходы в состоянии высокого импеданса | — | 8 | 24 | |||||
| ICC2 | Выходной ток питания | Io = 0 | Все выходы в состоянии высокого уровня | — | 14 | 24 | мА | |
| Все выходы в состоянии низкого уровня | — | 2 | 6 | |||||
| Все выходы в состоянии высокого импеданса | — | 2 | 4 | |||||
5.6 Характеристики переключения
свыше диапазона рабочей температуры воздуха (если не указано иное) VCC1 = 5 В, VCC2 = 24 В,
TA = 25 °C
| Параметры | Условия испытаний | Мин. | Ном. | Макс. | Ед. изм. | |
| tPLH Время задержки распространения, выходной сигнал низкого/высокого уровня для входа A | L293NE, L293DNE | CL = 30 пФ, см. рис. 2 | — | 800 | — | нс |
| L293DWP, L293N L293DN | — | 750 | — | |||
| tPHLВремя задержки распространения, выходной сигнал высокого/низкого уровня для входа A | L293NE, L293DNE | — | 400 | — | нс | |
| L293DWP, L293N L293DN | — | 200 | — | |||
| tTLHВремя перехода, выходной сигнал низкого/высокого уровня | L293NE, L293DNE | — | 300 | — | нс | |
| L293DWP, L293N L293DN | — | 100 | — | |||
| tTHLВремя перехода, выходной сигнал высокого/низкого уровня | L293NE, L293DNE | — | 300 | — | нс | |
| L293DWP, L293N L293DN | — | 350 | — | |||
5.7 Номинальные характеристики
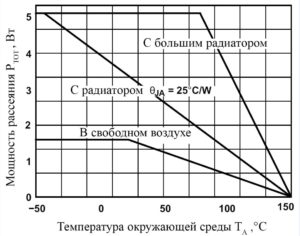 Рис. 1. Зависимость максимальной мощности рассеяния от температуры окружающей среды
Рис. 1. Зависимость максимальной мощности рассеяния от температуры окружающей среды
6. Информация об измерении параметров
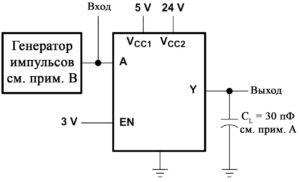 Испытательная схема
Испытательная схема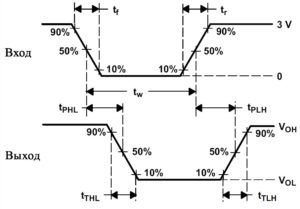 Формы напряжения сигналов
Формы напряжения сигналов
Рис. 2. Испытательная схема и напряжение формы сигналов
Примечания:
- A. CL включает probe and jig емкость.
- B. Генератор импульсов имеет следующие характеристики: tr ≤ 10 нс, tf ≤ 10 нс, tw = 10 мкс, PRR = 5 кГц, ZO = 50 Ом.
7. Подробное описание
7.1 Описание
L293 и L293D — это четырехканальные сильноточные H-мостовые драйверы . Эти устройства предназначены для управления широким спектром индуктивных нагрузок, таких как реле, соленоиды, двигатели постоянного тока и биполярные шаговые двигатели, а также другими сильноточными и высоковольтными нагрузками. Все входы совместимы для TTL-сигнала и допускают (поддерживают) уровень сигнала до 7 В.
Каждый выход представляет собой полную бестрансформаторную схему двухтактного усилителя со стоком на транзисторе Дарлингтона и истоком на комплементарном транзистором Дарлингтона. Драйверы включаются парами, для входов драйверов 1 и 2 активируется вход 1,2EN, а для входов драйверов 3 и 4 активируется вход 3,4EN. Когда на входе разрешения присутствует сигнал высокого уровня, соответствующие драйверы включены, а их выходы активны и находятся в фазе со своими входами. Когда на входе разрешения присутствует низкий уровень сигнала, эти драйверы отключены, а их выходы отключены и находятся в состоянии высокого импеданса. При правильно сформированных данных, поступающих на входы, каждая пара драйверов формирует H-мост для реверса, подходящий для управления соленоидами или двигателями.
На L293 для индуктивного подавления переходных процессов следует использовать внешние высокоскоростные выходные ограничительные диоды. На L293D эти диоды интегрированы для снижения сложности и размера схемы. Для питания логических входов, с целью минимизации рассеивания мощности ИС, предусмотрен вывод VCC1, отдельный от VCC2. Диапазон рабочей температуры для L293 и L293D находятся в пределах от 0 °C до 70 °C.
7.2 Функциональная блок-схема
 Функциональная блок-схема
Функциональная блок-схемаВ ИС L293D выходные диоды интегрированы в микросхему.
7.3 Функциональное описание
L293x имеет TTL-совместимые входы и высоковольтные выходы для управления индуктивной нагрузкой. В ИС L293 выходной ток может достигать до 2 A.
7.4 Функциональные режимы устройства
В таблице 1 перечислены функциональные режимы ИС L293x.
Таблица 1 — Таблица функций (каждый драйвер)(1)
Входы(2) | Выход (Y) | |
A | EN | |
H | H | H |
L | H | L |
x | L | Z |
(1) H = сигнал высокого уровня, L = сигнал низкого уровня, X = посторонний (безразличное состояние), Z = высокий импеданс (выключено)
(2) В режиме защитного отключения при перегреве выход находится в состоянии высокого импеданса, независимо от входных уровней сигнала.
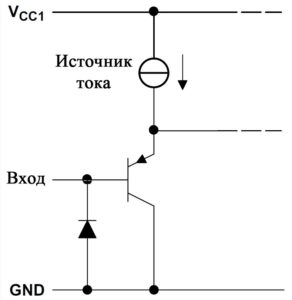 Рис. 3. Схема входов для ИС L293x
Рис. 3. Схема входов для ИС L293x
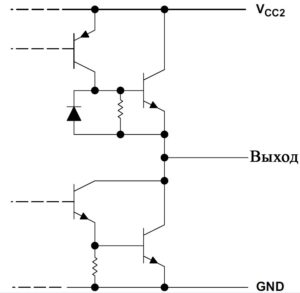 Рис. 4. Схема выходов для ИС L293
Рис. 4. Схема выходов для ИС L293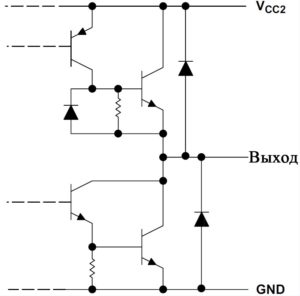 Рис. 5. Схема выходов для ИС L293D
Рис. 5. Схема выходов для ИС L293D
8 Информация о применении
Стандартное применение ИС L293 является управление двухфазным двигателем. Ниже приведен пример схемы, показывающей правильное подключение двухфазного двигатель к ИС L293.
Необходимо обеспечить 5 В питанием логическую часть ИС, подключенным к выводу VCC1, а также для входных допустимых уровней сигналов, принимающих данные и входов разрешения. Для питания силовой части ИС вывод VCC2 должен быть подключен к источнику питания, способному обеспечить необходимый ток и напряжение для нагрузок, подключенных к выходам.
8.1 Стандартное применение
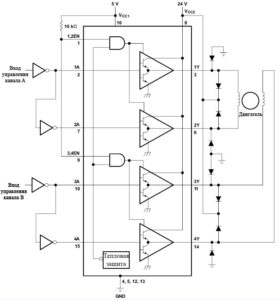 Рис. 6. Драйвер для двухфазного двигателя (L293)
Рис. 6. Драйвер для двухфазного двигателя (L293)
8.1.1 Требования к проектированию
Методы проектирования для применения вышеприведенной схемы, а также для применения нижеприведенных схем, должны соответствовать следующим требованиям к конструкции:
- Напряжение питания VCC1 должно находиться в пределах, указанных в п. 5.3 Рекомендуемые условия эксплуатации.
- Напряжение питания VCC2 должно находиться в пределах, указанных в п. 5.3 Рекомендуемые условия эксплуатации.
- Ток на канал не должен превышать 1 А для ИС L293 (600 мА для ИС L293D).
8.1.2 Детальная методика проектирования
При проектировании с применением ИС L293 или L293D необходимым условием является тщательное слежение за температурой кристалла во время работы, не превышающим рабочую температуру ИС. Правильный выбор радиатора (теплоотвода) обеспечит стабильную работу ИС с большим диапазоном тока на канал. См. п. 9 Рекомендации по энергоснабжению, а также пример компоновки (п. 10. 2).
8.1.3 Кривая применения
Дополнительная информация относительно соответствующей рассеиваемой мощности, представлена в п. 9 Рекомендации по энергоснабжению. На рис. 7 приведен график теплового рассеяния, опирающийся на рис. 14.
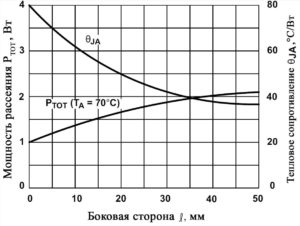 Рис. 7. Зависимость максимальной мощности рассеяния и кристалла от теплового сопротивления
Рис. 7. Зависимость максимальной мощности рассеяния и кристалла от теплового сопротивления
8.2 Системные примеры
8.2.1 ИС L293D в качестве драйвера управления двухфазным двигателем
На рисунке 8 изображена стандартная установка (система, устройство) для применения ИС L293D в качестве драйвера управления двухфазным двигателем. В п. 5.3 Рекомендуемые условия эксплуатации указаны минимальные и максимальные значения для соответствующих входов управления, принимающих высокий и низкий уровни напряжений, включающие каждый канал ИС.
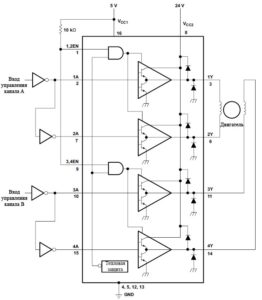 Рис. 8. Драйвер управления двухфазным двигателем (L293D)
Рис. 8. Драйвер управления двухфазным двигателем (L293D)
8.2.2 Управление двигателем постоянного тока
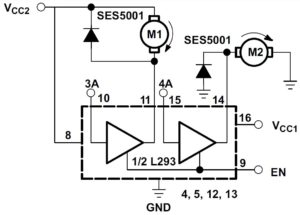
На рисунке 9 и 10 изображена стандартная установка (система, устройство) для применения ИС L293 в качестве контроллера управления для двигателей постоянного тока. Кстати, ИС L293 можно использовать в качестве простого драйвера для включения и выключения двигателя в одном направлении (вращение вправо или влево) и также может использоваться для управления двигателем в обоих направлениях (реверс). В таблице 2 и 3 перечислены функциональные режимы управления двигателем в одностороннем или двустороннем направлении вращения. В п. 5.3 Рекомендуемые условия эксплуатации указаны минимальные и максимальные значения для соответствующих входов управления, принимающих высокий и низкий уровни напряжений, включающие каждый канал ИС.
 Необходимо произвести подключение к земле и источнику напряжения (питания)
Необходимо произвести подключение к земле и источнику напряжения (питания)Рис. 9. Схема управления двигателем постоянного тока в одном направлении (вращение вправо или влево)
Таблица 2 — Однонаправленное (вращение вправо или влево) управление двигателем постоянного тока
EN | 3A | M1(1) | 4A | M2 |
H | H | Быстрая остановка двигателя | H | Пуск двигателя |
H | L | Пуск двигателя | L | Быстрая остановка двигателя |
L | X | Бесступенчатая (несинхроннизированная) остановка двигателя | X | Бесступенчатая (несинхроннизированная) остановка двигателя |
(1) L = сигнал низкого уровня, H = сигнал высокого уровня, X = безразличное состояние
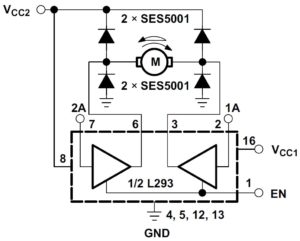 Рис. 10. Схема двунаправленного управления двигателем постоянного тока (реверс)
Рис. 10. Схема двунаправленного управления двигателем постоянного тока (реверс)
Таблица 3 — Двунаправленное управление двигателем постоянного тока (реверс)
EN | 1A | 2A | Функции(1) |
H | L | H | Вращение направо |
H | H | L | Вращение налево |
H | L | L | Быстрая остановка двигателя |
H | H | H | Быстрая остановка двигателя |
L | X | X | Бесступенчатая (несинхроннизированная) остановка двигателя |
(1) L = сигнал низкого уровня, H = сигнал высокого уровня, X = безразличное состояние
8.2.3 Управление биполярным шаговым двигателем
На рисунке 11 изображена стандартная установка (система, устройство) для применения ИС L293D в качестве драйвера управления двухфазным двигателем. В п. 5.3 Рекомендуемые условия эксплуатации указаны минимальные и максимальные значения для соответствующих входов управления, принимающих высокий и низкий уровни напряжений, включающие каждый канал ИС.
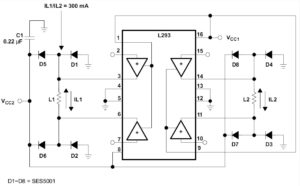 Рис. 11. Схема управления биполярным шаговым двигателем
Рис. 11. Схема управления биполярным шаговым двигателем
9. Рекомендации по питанию схемы
Напряжение питания для логической части ИС вывода VCC1 составляет 5 В ± 0,5 В, а для силовой части вывода VCC2 может быть таким же, как и VCC1, или более высоким с пиковым напряжением до 36 В. Необходимо использовать байпасные конденсаторы номиналом 0,1 мкФ или выше, подключенным непосредственно к выводам VCC1 и VCC2. Требования порядка последовательности при включении и выключении питания.
Правильный выбор (установка) радиатора (теплоотвода) для ИС L293 во время управления сильным током имеет решающее (критическое) значение при проектировании. Rthj-amp ИС L293 может быть снижено путем пайки GND-выводов в подходящей медной области печатной платы или внешнего радиатора.
На рисунке 14 изображена максимальная мощность рассеяния корпуса PTOT и θJA в зависимости от стороны двух равных квадратных областей меди, имеющих толщину 35 мкм (см. Рисунок 14). Кроме того, можно использовать внешний радиатор (см. Рис. 12).
При пайке температура выводов не должна превышать 260 °C, а время пайки не должно превышать 12 секунд.
Внешний радиатор или медная область печатной платы должны быть подключены к электрическому заземлению.
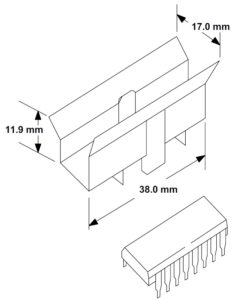 Рис. 12. Пример установки внешнего радиатора (теплоотвода)
Рис. 12. Пример установки внешнего радиатора (теплоотвода)(θJA = 25 °C/Вт)
10. Компоновка
10.1 Руководство по компоновке
Для снижения электромагнитных помех, необходимо расположить ИС как можно ближе к нагрузке, с целью уменьшения выходных трасс. Используйте твердые сквозные отверстия для отвода тепла от заземляющих выводов к плоскости заземления печатной платы.
10.2 Пример компоновки
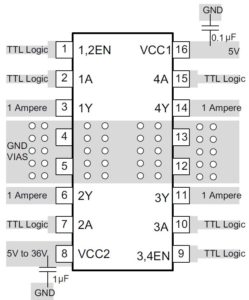 Рис. 13. Компоновочная схема
Рис. 13. Компоновочная схема
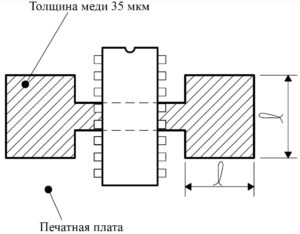 Рис. 14. Пример области меди печатной платы (используется в качестве теплоотвода)
Рис. 14. Пример области меди печатной платы (используется в качестве теплоотвода)Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.