


Arduino и двигатели||Arduino-diy.com
Одно из самых интересных в хобби-электронике – это использование двигателей для «оживления» ваших проектов.
Однако добавление мотора в ваш проект может оказаться непростой задачей, особенно, если вы до этого с приводами не работали.
Данная статья даст вам понимание принципов работы двигателей различных типов и пояснит многие необходимые нюансы и их особенности.
Принцип работы двигателей
Перед тем как разбираться, как именно моторы работаю, давайте сосредоточимся на том, для чего они используются. Моторы используют электромагнитные силы для обеспечения движения, преобразования электроэнергии в механическую.
Магнитные поля создают силу, которая может перемещать объекты. Каждый магнит имеет магнитное поле с северным и южным полюсом. Если вы попробуете приблизить два северных полюса двух магнитов, они будут отталкиваться.
Электродвигатель использует свойства магнитов отталкиваться и притягиваться для генерации движения. В обычном электродвигателе два магнита: постоянный и переменный. Переменный магнит называется электромагнитом. Электромагнит создается с помощью пропускания электрического тока через проводник. Постоянный магнит постоянно имеет магнитное поле (северный и южный полюса), а электромагнит генерирует магнитное поле только, когда через него пропускают электрический ток. Сила магнитного поля электромагнита может быть увеличена с помощью повышения тока, проходящего через проводник или методом формирования нескольких обмоток проводника.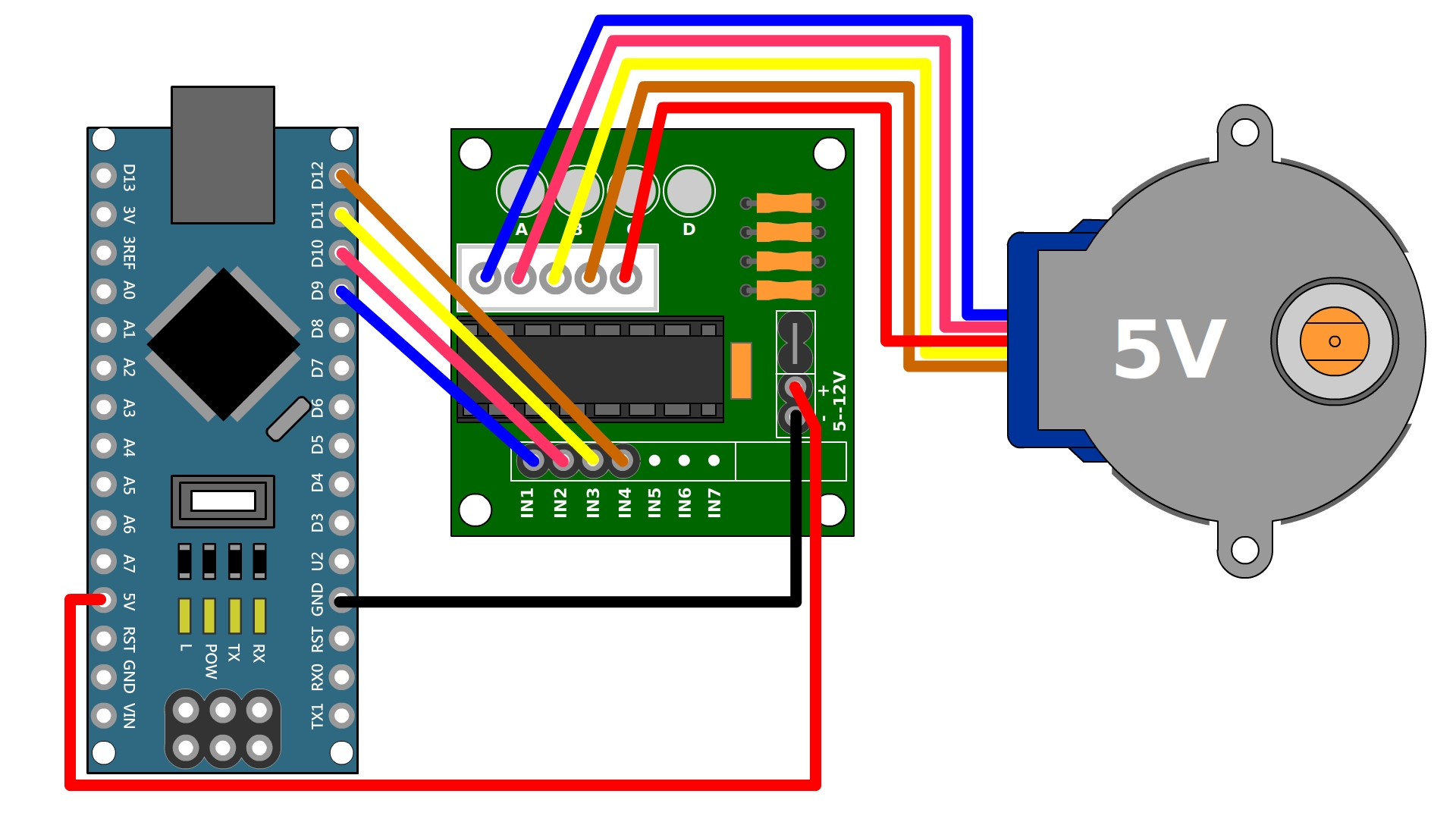
В электродвигателе электромагнит устанавливается на ось таким образом, что он может свободно вращаться внутри магнитного поля постоянного магнита. В момент, когда через проводник проходит электрический ток, переменное магнитное поле взаимодействует со статическим магнитным полем магнита, возникают силы отталкивания и притяжения. Это заставляет электромагнит вращаться, возникает движение.
Основные узлы электродвигателя:
— Постоянный магнит (магниты), в случае, когда он установлен неподвижно, называется статором;
— внутри статора есть катушка, которая установлена на оси и вращается, называется ротором.
Двигатели постоянного тока
Двигатели постоянного тока (DC motor) во многом являются самыми простыми электродвигателями. Большинство «щеточных» двигателей работают одинаково. Есть ротор и статор. Есть магниты на статоре и катушка на роторе с магнитным полем, которое генерируется с помощью подачи на нее силы тока.
При использовании источника постоянного тока, для управления подобным двигателем практически ничего не надо. Скорость его вращения зависит от силы тока, которая поступает на катушки от источника питания к коммутатору.
Для вращения оси двигателя в противоположном направлении, достаточно подключить контакты от источника питания к двигателю наоборот.
Шаговые двигатели
Как и двигатели постоянного тока, шаговые двигатели состоят из ротора и статора. Но, в отличие от других двигателей, ротор шагового двигателя представляет из себя постоянный магнит, который вращается внутри полей, создаваемых электромагнитами. Статор состоит из нескольких катушек, которые расположены в корпусе мотора. Когда ток проходит через катушки, подвижный вал двигателя (который является, по сути, постоянным магнитом) располагается в соответствии с генерируемым электромагнитной катушкой полем. Когда катушки заряжаются в определенной последовательности, вал двигателя выбирает новые положения и, соответственно, начинает вращаться.
Ротор приводится в движение последовательной подачей напряжения на катушки. Шаговый двигатель имеет возможность проворачивать ротор на определенный шаг в зависимости от разрешения импульса.
Шаговые двигатели являются отличным выбором для проектов на Arduino (и не только) по нескольким причинам. Они стоят относительно недорого, у них маленькая погрешность, следовательно – это идеальный выбор для управления с разомкнутой системой управления (без дополнительных датчиков положения рабочего органа). Шаговые двигатели будут обеспечивать заданное положение ротора исключительно в зависимости от поданной силы тока.
Эти двигатели предназначены для вращения в одном и противоположном направлении. Если вы подключите источник питания к контактам шагового двигателя, вал начнет вращаться. Если вы подключите проводники наоборот, он будет вращаться в противоположном направлении. Правда, стоит учесть, что в некоторых шаговых двигателях вращение в противоположную сторону невозможно. Перед его запуском, уточняйте этот момент.
Серводвигатели
Обычные серводвигатели для моделистов используются для поворота и удерживания определенной позиции в диапазоне от 0 до 180 градусов. Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
В большинстве случаем серводвигатели имеют три провода: питание, земля и сигнал. Обычно провод питания красного цвета, земля – черного или коричневого. Сигнал – желтый, оранжевый или белый.
В серводвигателях, которые, например, используются в системах управления радиоуправляемых машин, электродвигатель подключен к потенциометру. Стандартный приемник/передатчик посылает ШИМ-сигналы на серву. Электроника (небольшая плата-контроллер) внутри серводвигателя, переводит ширину импульса в положение. Когда на серву поступает сигнал к повороту, питание будет подаваться на мотор до тех пор, пока потенциометр не достигнет положения, которое будет соответствовать заданному предварительно через приемник/передатчик.
Сигнал управления является цифровым ШИМ сигналом с частотой 50 Гц. Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Импульс шириной 1.5 миллисекунды обычно устанавливает серводвигатель в «нейтральное» положение или 90 градусов. Импульс шириной 1.25 миллисекунд может установить его в 0 градусов, а импульс 1.75 миллисекунды в 180 градусов. Физические ограничения и время для различных серводвигателей могут отличаться, но его нейтральное положение всегда соответствует 1.5 миллисекундам.
Вибрационные двигатели
Вибрационные двигатели часто используются в мобильных устройствах для регистрации наличия движения.
Вибрационные моторы по конструктивному исполнению похожи на большинство шаговых двигателей и двигателей постоянного тока. Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать. Интенсивность вибрации зависит как от размеров двигателя, так и от размеров эксцентрика.
На видео сверху показан мотор, установленный на металлической основе. Обратите внимание, как лист металла совершает волновые движения под действием вибрации вибрационного мотора.
Как выбрать двигатель для проекта
Выбор типа двигателя для вашего проекта зависит от того, что именно вы собираетесь автоматизировать. Если вы хотите установить камеру и обеспесить ее поворот влево-вправо, идеальным выбором будет серводвигатель. Если вы передаете движение на зубчатые колеса с необходимостью обеспечения реверса, лучшим выбором станет шаговый двигатель.
Естественно, отличным выбором для управления вашим двигателем станет плата Arduino или ее клоны. Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Дальше в статье приведена информация о том, как можно быстро «оживить» выбранный вами предварительно двигатель с использованием платы Arduino.
Использование шагового двигателя с Arduino
Стоит отметить, что «оживлять» свои проекты с помощью плат Arduino и оболочки Arduino IDE для их программирования очень легко из-за наличия большого количества уже готовых библиотек. Подключение шагового двигателя к плате Arduino отличается от подключения двигателя постоянного тока. Существует специальная библиотека и функция, встроенные в Arduino IDE. Более детально об этом вы можете почитать здесь.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Stepper -> stepper_oneRevolution
Данная программа дает возможность управлять уни- или биполярным шаговым двигателем после его подключения к цифровым пинам 8-11 на плате Arduino. После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
Данный пример – отличное начало. Естественно, вы можете вносить свои коррективы в программу, подстраивая ее под свои задачи. Задержка указывается в миллисекундах, так что если вы не хотите выдерживать паузу между оборотами, можете выставить задержку delay(10). Или, для того, чтобы замедлить вращение можете изменить stepsPerRevolution и присвоить ему значение, например, (1000000).
Изменения скетча зависят от того, что именно вы хотите реализовать. Для лучшего понимания того, как именно происходит обмен данными между шаговым двигателем и платой Arduino, советую поэкспериментировать с другими примерами.
Использование двигателя постоянного тока / вибрационного двигателя с Arduino
В некоторых проектах нет смысла использовать микропроцессоры вроде Arduino.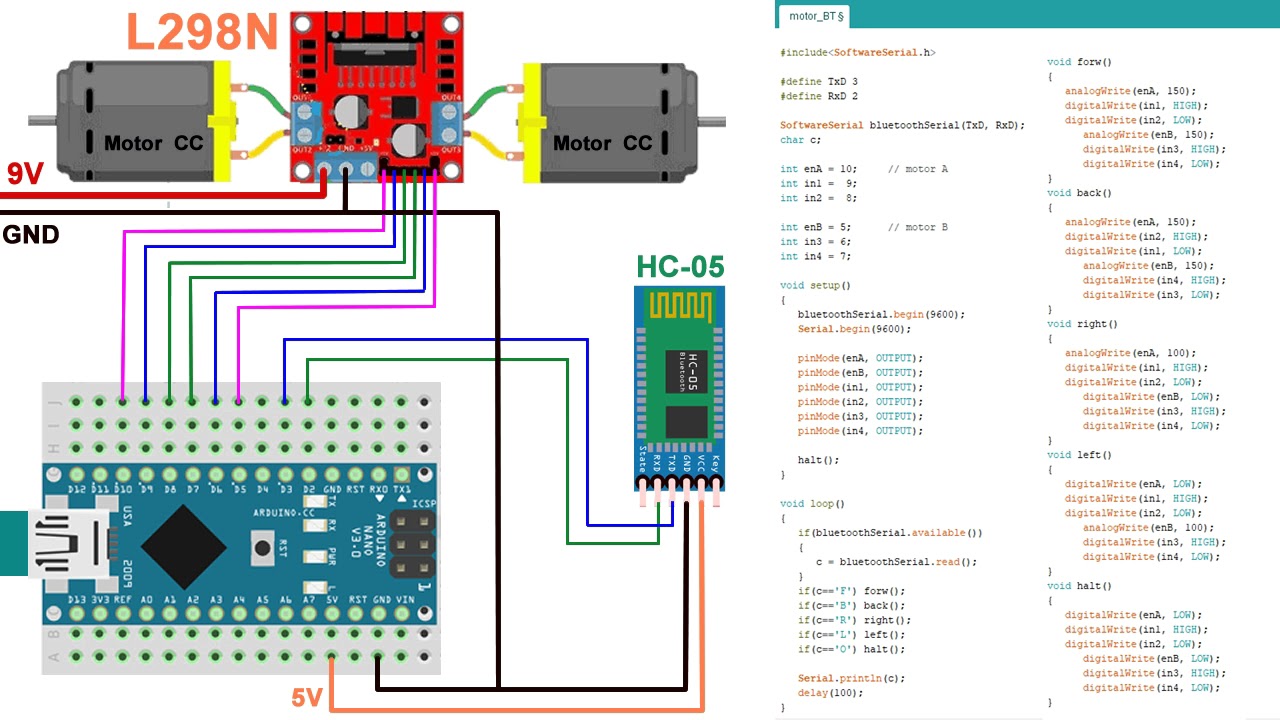 Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
В таком случае, мотор будет подключатся непосредственно к вашему источнику питания через выключатель, который соединен с позитивным коннектором вашего двигателя.
Использование серводвигателя с Arduino
Так же как и шаговые двигатели, для работы серводвигателей в оболочке Arduino IDE есть встроенная библиотека.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Servo -> Knob
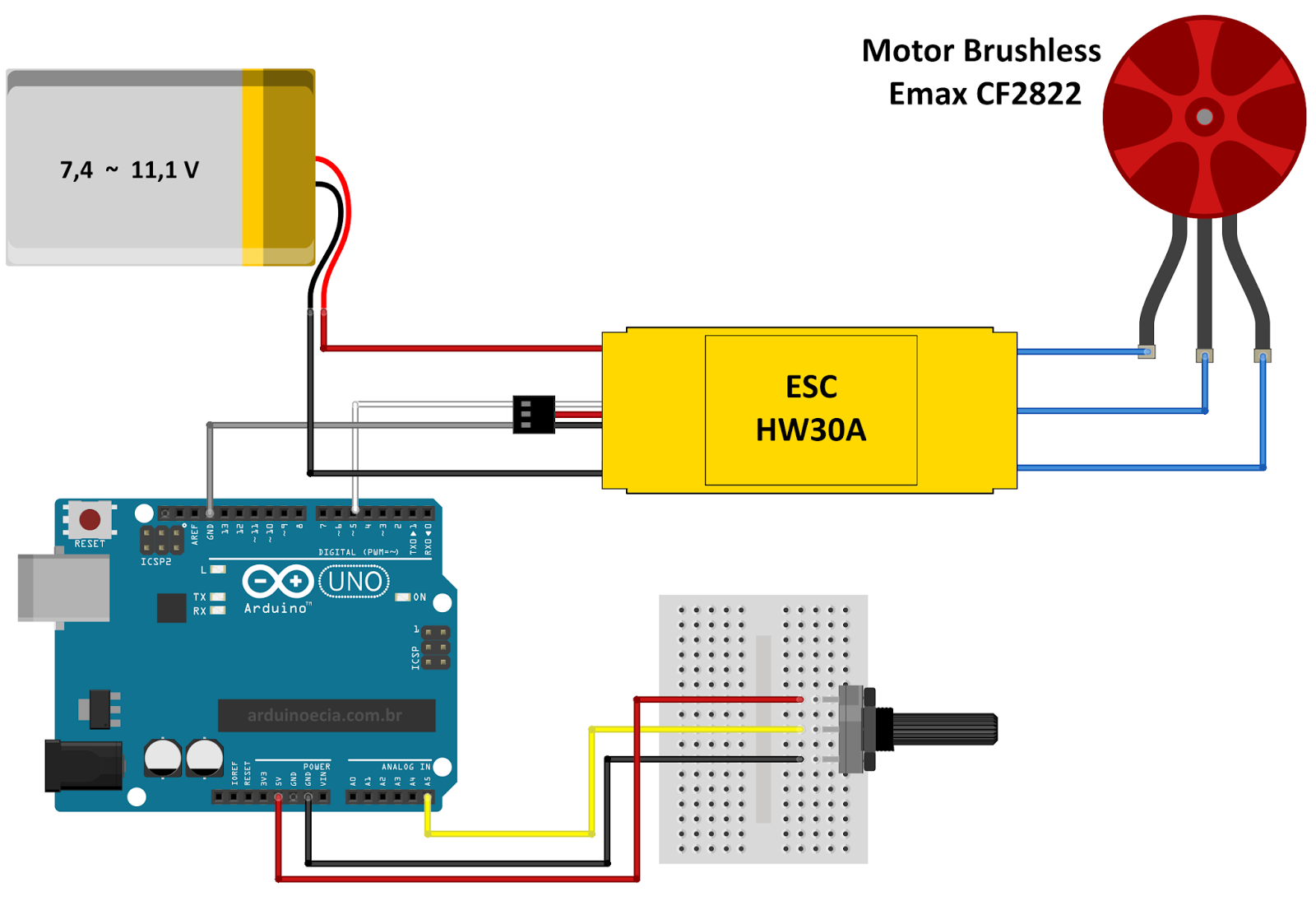
Данная программа обеспечивает управление серводвигателем, который подключен к 9-му ШИМ пину платы Arduino. Потенциометр, в свою очередь, подключен к аналоговому пину 0 и обеспечивает управление положением серводвигателя, посылая напряжение, пропорциональное сопротивлению на пин А0 платы Arduino. Скетч, который «залит» в плату Arduino, интерпретирует сигнал в импульсы, которые посылаются на серводвигатель. Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.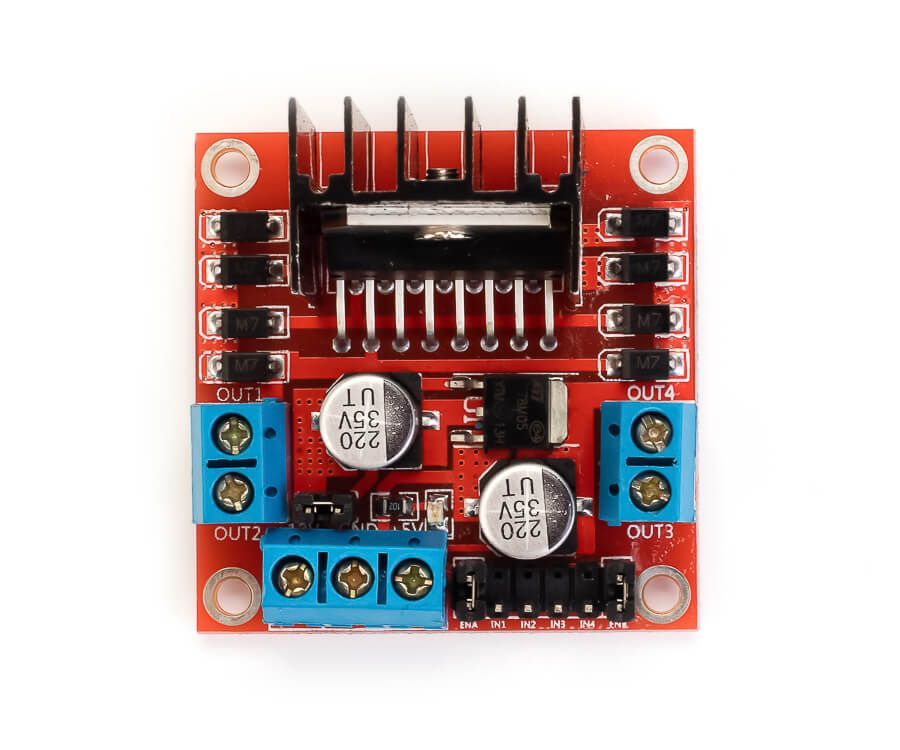
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы.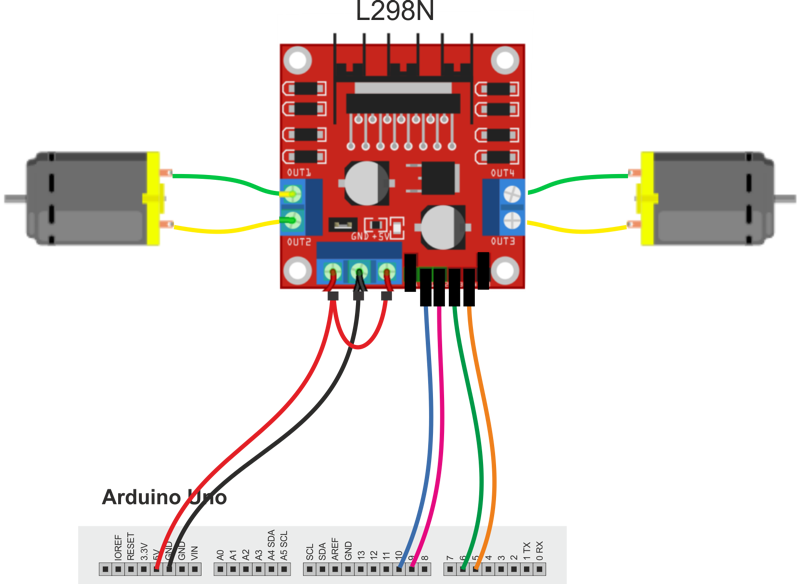 В таблице приведены основные состояния и соответствующие им комбинации на пинах.
В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).
При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность.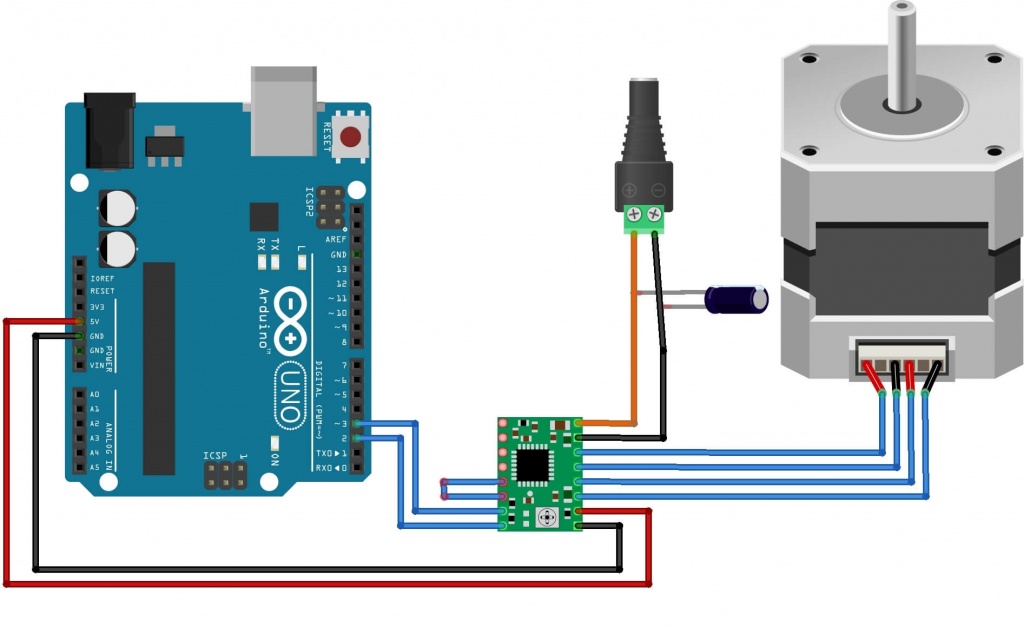 Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.
Пример подключения одного двигателя к Ардуино показан на рисунке.
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.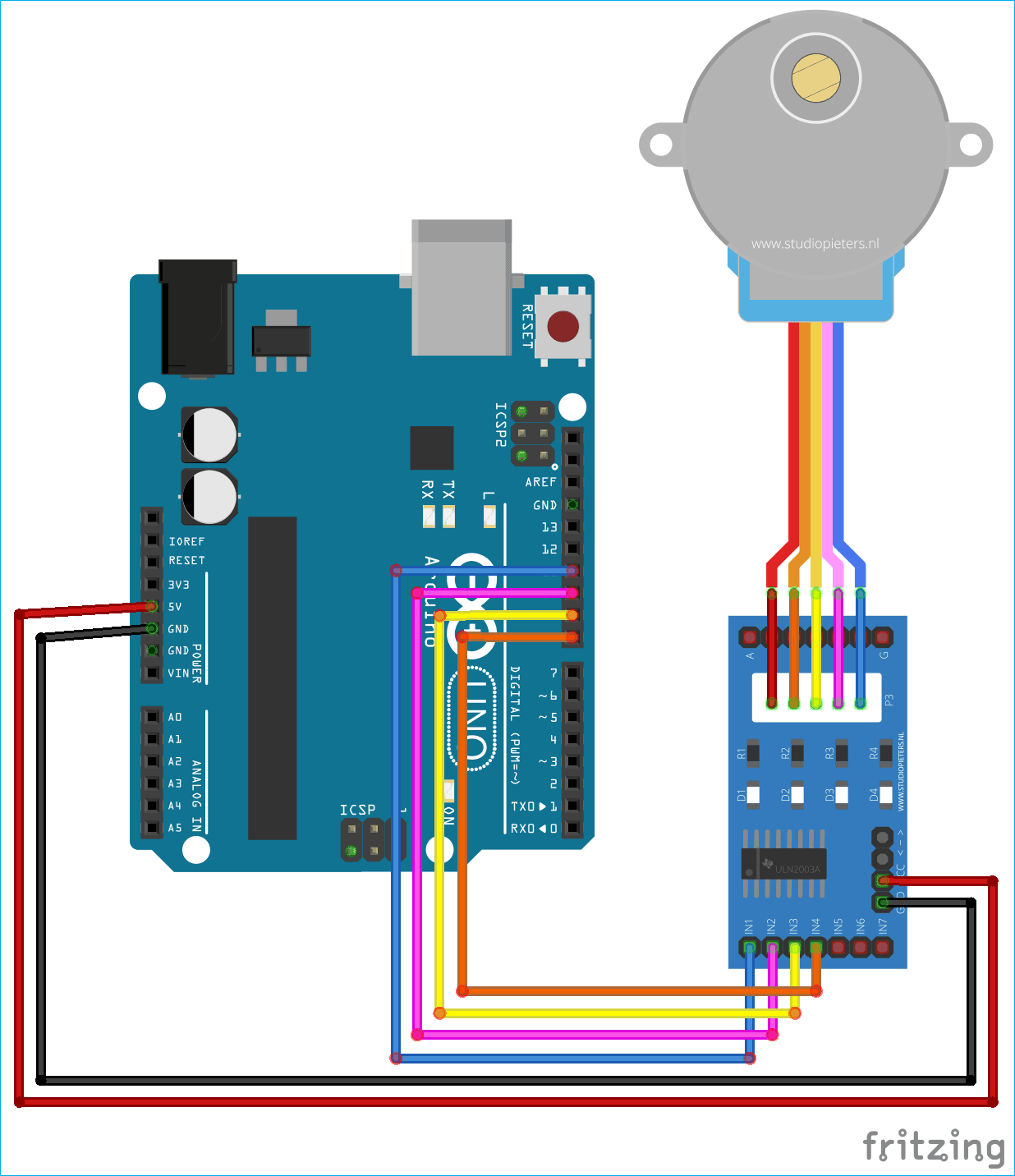
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
Драйвер коллекторного двигателя VNh3SP30 | arduinoLab
VNh3SP30 это мостовой (H-bridge) драйвер для мощных коллекторных двигателей.
Характеристики драйвера:
Особенности модуля:
Модуль собран на микросхеме-драйвере VNh3SP30 от STMicroelectronics, в драйвере использованы современные MOSFET транзисторы с сопротивлением перехода 19 MΩ, драйвер имеет защиту по температуре, перенапряжению и короткому замыканию.
Подключение модуля к Arduino:
Назначение выходов:
Обозначение на обратной стороне платы,
- +5V — Питание 5 вольт, не понятно зачем, по всей видимости нужно для подтягивающих резисторов.

- GND — Пояснений не требует, масса.
- EN — Включение драйвера, чтобы включить драйвер нужно подать логическую единицу.
- CS — Выход датчика тока.
- INA — Вход драйвера A.
- INB — Вход драйвера B.
- PWM — Вход для управления скоростью вращения двигателя.
Модуль можно подключать на любые свободные выходы arduino, кроме ноги PWM, для него выход должен уметь генерировать ШИМ, такие выходы обозначены ~ (тильдой).
Софт:
#define INA 3 // выходы arduino
#define INB 4
#define EN 2
#define PWM 6
int motorSpeed = 255; // скорость мотора
void setup(){
pinMode(INA, OUTPUT);
pinMode(INB, OUTPUT);
pinMode(EN, OUTPUT);
digitalWrite(EN, HIGH);
}
void loop()
{
digitalWrite(INA, LOW); // крутим мотор в одну сторону
digitalWrite(INB, HIGH);
analogWrite(PWM,motorSpeed);
delay(1000);
digitalWrite(INA, HIGH); // крутим мотор в противоположную сторону
digitalWrite(INB, LOW);
analogWrite(PWM, motorSpeed);
delay(1000);
digitalWrite(EN, LOW); // выключаем
delay(1000);
digitalWrite(EN, HIGH);
}
Использование для управления нагрузкой:
потом
Видео:
 youtube.com/embed/zQVXON8eEHg?feature=oembed» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/zQVXON8eEHg?feature=oembed» frameborder=»0″ allowfullscreen=»»/>
Купить:
тут. или тут.
Запись опубликована автором admin в рубрике Обзоры с метками H-bridge, коллекторный двигатель.
Драйверы двигателя L298N, L293D и Arduino Motor Shield | АмперКО
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).
При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
УРОК 12. ARDUINO И ЭЛЕКТРОМОТОР
Вращаем двигатель — Крутись Мотор.
Помните, ранее мы с вами изучили серводвигатель которым управляла ардуина? Теперь мы познакомимся с двигателем вращения. Для это потребуется транзистор, который может коммутировать (переключать) больший ток, чем может себе позволить Arduino. При использовании транзистора, нужно убедиться, что его параметры, подходят для работы определенного оборудования. Транзистор который мы используем для этой схемы — 2N222A, может справится с напряжением до 40 Вольт и до 200 миллиампер, — идеально подходит для нашего микро двигателя!
Когда вы будете собирать эту схему, будьте осторожны, не перепутайте транзистор с датчиком температуры, они очень похожи!
Вы видите саму принципиальную схему к уроку 12, сложностей быть не должно, при правильном соединении всех частей, все должно получиться.
Принципиальная схема. Урок 12. Мотор и Arduino
Для этого опыта вам понадобится:
1. Arduino UNO — 1 шт.
2. Электромотор — 1 шт.
3. Транзистор 2N222A — 1 шт.
4. Диод 1N4148 — 1 шт.
5. Резистор 330 Ом — 1 шт..
6. Соединительные провода.
7. Макетная плата.
Далее идет схема электрических соединений для этого опыта.
Cхема электрических соединений макетной платы, мотора и Arduino. Уроку 12. Arduino и Электромотор
Скачать код к опыту 12. Скетч и подробное описание (Обязательно прочтите весь скетч! Он подробно описан здесь):
Набор для экспериментов ArduinoKit.
Код программы, на руском языке для опыта №12 можно скачать здесь: sketch 12
Вид созданного урока на макетной плате, у вас должно получиться что-то подобное:
Arduino — Крутись мотор. Урок 12
В результате проделанного опыта Вы должны увидеть…
Если схема собрана правильно и все электронные компоненты исправны двигатель постоянного тока должен вращаться.
Возможные трудности:
Мотор не вращается
Это может быть из за того что вы используете свой транзистор, т.е. отличающийся номиналом. Найдите распиновку (в интернет или справочнике) имеющегося у вас транзистора и его совместимость с P2N2222A. Проверьте работу двигателя от источника 5 вольт. Возможно двигатель расчитан на больший ток, в таком случае вы можете использовать реле из уроака 13. Иногда плата ардуино может отключиться от компьютера, попробуйте отключить от нее USB разъем, а затем снова подключить к порту USB. Проверьте надежность и правильность всех электрических соединений.
Всем удачи! Ждём от вас комментарии и фотоотчеты о ваших опытах. ARDUINO УРОК 12. КРУТИСЬ МОТОР.
▶▷▶▷ схема подключения электродвигателя на транзисторах
▶▷▶▷ схема подключения электродвигателя на транзисторах| Интерфейс | Русский/Английский |
| Тип лицензия | Free |
| Кол-во просмотров | 257 |
| Кол-во загрузок | 132 раз |
| Обновление: | 13-04-2019 |
схема подключения электродвигателя на транзисторах — Регулятор оборотов электродвигателя : изменение скорости cheboprotehnologiiprimenenie-regulyatorov Cached Железняк или сердечник ротора напрессовывается непосредственно на вал Между ротором и Частотный преобразователь для электродвигателя Школа для electricalschoolinfoeconom721-chastotnyjj Cached Рис 1 Схема частотного преобразователя Входной каскад выпрямляет подаваемое синусоидальное напряжение сети, которое после сглаживания с помощью индуктивно-емкостного фильтра служит источником электропитания Источники питания — radio-schemyru radio-schemyrusupplyhtml?start49 Cached Электронный предохранитель (см рисунок) содержит мощный транзистор vt2, который включен в минусовый провод питания, два стабилизатора тока на полевых транзисторах один регулируемый ( на vt1), в другой Компьютерный блок питания Википедия ruwikipediaorg wikiКомпьютерный Cached Описание Если брать, в качестве примера, блок питания для настольного компьютера персонального стандарта pc, то, согласно спецификации разных лет, он должен обеспечивать выходные напряжения 5 12 3,3 Вольт а также 5 Сборник схем RadioNet radionetcomrushemindexsphp Cached Search datasheet : РЕЙТИНГ: ТЕНДЕРЫ: ИССЛЕДОВАНИЯ: DATASHEETS: КАТАЛОГ СХЕМ Телефонные трубки для прозвонки кабеля Устройство, схема и zametkielectrikarutelefonnye-trubki-dlya-prozvonki Cached Случайные статьи Указательный плакат; Выбор, установка и схема подключения вентилятора era 4s et с таймером в ванную комнату Тиристорные регуляторы мощности Схемы с двумя тиристорами electrikinfomainpraktika815-tiristornye-regulyatory Cached Несколько лучшие результаты дают схемы с использованием двух тиристоров, включенных встречно параллельно: и места не надо для лишних диодов, да и тиристорам работать легче Схемы любительских частотных преобразователей electrikinfomainpraktika545-shemy-lyubitelskih Cached Рисунок 5 Напряжение uрег через резистор r1 также подается на задающий генератор da1, выполненный на микросхеме КР1006ВИ1 (импортный вариант ne555) Why Our Current Education System Is Failing A Boundless World wwwaboundlessworldcom education-system -failing Cached Incredible You are a very talented writer and I completely agree with you You bring up a VERY good point Дифференциальная защита трансформаторов-принцип действия elektronchicruelektrotexnikadifferencialnaya Cached Использование материалов сайта возможно при наличии активной ссылки на первоисточникСвязь с редакцией сайта:bylira3gmailcom Promotional Results For You Free Download Mozilla Firefox Web Browser wwwmozillaorg Download Firefox — the faster, smarter, easier way to browse the web and all of 1 2 3 Next 26
- В отличие от ранее рассматриваемых аналогичных устройств, в данном устройстве обеспечена стабильная
- частота 50 Гц, мощность потребителей может достигать 600Вт, форма напряжения на выходе синусоида (не идеальная), но электродвигатели мощностью до 600Вт работают устойчиво. Современные преобразовател
- е идеальная), но электродвигатели мощностью до 600Вт работают устойчиво. Современные преобразователи частоты предлагают гибкий выбор законов регулирования частоты и напряжения на электродвигателе. Порядок выполнения работы Перед выполнением заданий необходимо собрать схему, показанную на рис. 8. Силовые преобразователи в электроснабжении: Методические указания к выполнению лабораторных работ. Страница 3Читать бесплатно книгу онлайн без регистрации в электронном виде на сайте полнотекстовой электронной библиотеки Единое окно для учащихся ВУЗов… quot;ELDINquot; — Ярославский электромашиностроительный завод. Производство электродвигателей, генераторов, комплектных электроприводов, бытовых вентиляторов, насосов. Продажа промышленных насосов, технические характеристики. Предлагаемое устройство собрано на микроконтроллере ATmega853516PI и управляет дверным замком на основе соленоида или электродвигателя. Даны схемы исполнительных устройств для подключения соленоида или электродвигателя, питаемых постоянным напряжение 12 В… Конденсаторные двигатели разновидность асинхронных двигателей , в обмотки которого включены конденсаторы для создания сдвига фазы тока. 1 Подключаются в однофазную сеть посредством специальных схем. Вывод одной обмотки электродвигателя подключается к фазовому… От его местоположения вдоль платы зависит степень генерируемого импульса на ключ, роль ключа выполняет полевой транзистор (на фото выше обозначен как регулятор скорости вращения). Солнечной шестерни, которая закреплена на валу электродвигателя; Для управления же дискретными приборами и модулями других производителей, требующих отрицательного смещения на затворе, может быть рекомендована схема, изображенная на рис. 4.
бытовых вентиляторов
мощность потребителей может достигать 600Вт
схема подключения электродвигателя на транзисторах Картинки по запросу схема подключения электродвигателя на транзисторах Другие картинки по запросу схема подключения электродвигателя на транзисторах Жалоба отправлена Пожаловаться на картинки Благодарим за замечания Пожаловаться на другую картинку Пожаловаться на содержание картинки Отмена Пожаловаться Видео Мотор на транзисторе с управляющей катушкой Схема Аквадевайс YouTube февр г Реверс мощного электродвигателя постоянного тока Сергей Меркулов YouTube дек г Видеоуроки по Arduino Моторы и транзисторы я серия, ч AmperkaRu YouTube мая г Все результаты Управление мотором постоянного тока с помощью одного wikiamperkaruробототехникаподключениемоторачерезтранзистор Похожие окт г В данной схеме транзистор будет работать в ключевом режиме по одной команде установка уровня HIGH на затворе от Arduino Ардуино управление двигателем постоянного тока, LD Класс robotclassrututorialsarduinodcmotordriver Похожие мая г Подключение драйвера LD к Arduino начинающий робототехник сталкивается с проблемой подключения двигателя к микроконтроллеру В этой схеме можем использовать NPN транзистор NA Схема подключения двигателя Вытяжки в г Diagram, Floor асинхронного двигателя Open схема подключения в распредщитке варочной панле и идухового шкафа через УЗО и автомат Электропроводка, Electronics Шарманка на полевом транзисторе КПА РадиобукА Сергей Электротехника Реверс маломощного электродвигателя electeblogspotcomblogpost_html Похожие июн г Для этого необходимо изменить схему включения двигателя то на трёх транзисторах можно реализовать схему для пуска, остановки Схема типового подключения трехфазного двигателя с питанием digitroderu Схемы авг г Схема соединения трехфазного двигателя и предварительного драйвера полевых транзисторов MCAPEK Транзисторное управление двигателями в схемах на nauchebenet Радиоэлектроника Микроконтроллеры февр г Схемы подключения электродвигателей через транзисторные ключи Диод VD защищает транзистор VT от выбросов напряжения Предлагают рационализаторы ЮжноУральской магистрали wwwtsiruatshtml Похожие Схема индикатора питается от одного элемента ЦНК, Транзисторы VT и VT должны иметь одинаковые не менее коэффициенты усиления ВТОРИЧНОЕ ИСПОЛЬЗОВАНИЕ ЭЛЕКТРОДВИГАТЕЛЯ СЛК Клеммы К нужны для подключения питания к реле ИВГ, ИМВШ; К для Arduino подключение двигателя постоянного тока и управление им geekmaticinuaarduino_motor_control Похожие Схемы подсоединения двигателей постоянного тока к контроллерам Arduino различными Управляем электродвигателем при помощи транзисторов Подключение электромотора к Arduino Хабр Habr янв г Два транзистора работают как составной транзистор , нужно это для Схема проста и позволяет крутить двигатель только в одном Схема и принцип работы Hмоста для управления двигателями Уроки Ардуино Как управлять полярностью двигателя с помощью электронных компонентов ? Нмост на транзисторах позволяет с помощью управляющих сигналов TBFNG допускает подключение двух коллекторных двигателей или Как подключить к устройству нагрузку? Сайт Паяльник cxemnet Начинающим Похожие мар г В данной схеме применен npn транзистор , включенный по схеме ОЭ составляет десятки амперособо мощные электродвигатели , Arduino двигатель собираем и программируем устройство Уроки апр г Для включения и управления скоростью двигателя используются Транзистор в этом примере завершает схему двигателя на землю Самые простые схемы управления вращением двигателя Перейти к разделу Мостовая схема на транзисторах ,управляемая от микроконтроллера Мостовая схема на транзисторах ,управляемая от Управление двигателем постоянного тока joytaru wwwjoytaru Измерение и контроль Похожие нояб г Управление двигателем при помощи биполярного транзистора Самый простой способ приведения в действие двигателя показан ниже Схема такого подключения , как правило, выглядит следующим образом Китайцы и реверс DC моторов четырьмя транзисторами Аппаратная arduinoru Форумы Аппаратные вопросы Похожие апр г сообщения авторов На транзисторах маркировка SD Я в свое время делал такой драйвер двигателя управление мя пинами, как и хочет автор К недостаткам данной схемы включения можно отнести невысокое входное Микросхемы драйверов реверсируемых двигателей постоянного wwwgawru Статьи Источники питания Выбор необходимого драйвера и схемы включения можно сделать, тока лежит Нмост на биполярных транзисторах , режим работы которого задается двумя Драйвер одного реверсируемого двигателя постоянного тока Схемы любительских частотных преобразователей Electrikinfo electrikinfomainpraktikashemylyubitelskihchastotnyhpreobrazovateleyhtml Похожие Подключение двигателя к выходу трехфазного инвертора Выходной транзистор оптрона в этой схеме также выполняет функцию дополнительного Как подключить трехфазный электродвигатель в сеть Вт Подключение и установка Схема подключения трехфазного электродвигателя на через конденсаторы транзисторы из серии VT, VT;; резисторы МЛТ;; кремниевые Схема управления двигателя Лабораторная работа Unity Pro Рис Схемы подключения электродвигателей через транзисторные ключи продолжение в транзисторы VT, VT соединяются параллельно Схема реверса электродвигателя Реверс электродвигателя Реверсивная схема подключения х фазного электродвигателя Схема Каждый полумост состоит из двух транзисторов один из которых с каналом n Драйвер для коллекторного двигателя на полевых транзисторах RC Форум forumrcdesignru Cамолёты Общий Аппаратура радиоуправления Похожие сент г Параметры двигателя питание В мощьность до Вт Схема Прямое подключение транзистора к порту микроконтроллера, я это Трехфазный двигатель в однофазной сети без конденсаторного мар г Если собрать обмотки асинхронного электродвигателя по схеме Оптимальными считаются схемы подключения обмоток в звезду или который управляется прямым и обратным биполярными транзисторами Схемы подключения и управление твердотельными реле Рейтинг , голосов янв г Схемы подключения твердотельных реле для переменного и постоянного тока Управление транзистором PNP, НО реле; Управление Выбор теплового реле для электродвигателя ; Реле напряжения Самодельный преобразователь с B на В типы, схемы Электрика компонентов Такое устройство будет полезно для подключения бытовых приборов в автомобиле Установка более мощного транзистора Схема подключения эл двигателя на В Сабвуфер своими wwwradiochipirushemapodklyucheniyaeldvigatelyanav Подключения электродвигателя с конденсатором Электрический двигатель В можно подключить на В с помощью дополнительного Частотный преобразователь виды, принцип действия, схемы electricalschoolinfoelprivodchastotnyjjpreobrazovatelvidyprinciphtml Похожие Для включения режима торможения двигателя в схему может быть установлен управляемый транзистор с мощным резистором, рассеивающим Регулирование оборотов двигателя постоянного Радио для всех wwwjunradiocomblogregulirovanie_oborotov_dvigatelja Похожие нояб г Мостовая схема на транзисторах кт Схема для Для этого необходимо изменить схему включения двигателя Рисунок Схема Твердотельное реле схема, обзор цен, принцип работы Asutpp Главная Электрооборудование Рейтинг голос окт г Схема включения твердотельного реле применяют для электродвигателя , станочного оборудования и прочих отраслей промышленности Но, перед тем как подключить твердотельное реле на транзисторах Проект Транзистор MOSFET Показываем усилительные Для регулирования скорости двигателя будем использовать потенциометр Схема подключения элементов для данного эксперимента показана на рис Мой первый радиоуправляемый робот на Arduino Записки мар г Типичная схема подключения электродвигателя превосходно построенная на транзисторах и логических вентилях никакой магии Трехфазный двигатель в однофазной сети без конденсаторов stroysvoydomrutrexfaznyjdvigatelvodnofaznojsetibezkondensatorov Похожие мар г Пошаговая инструкция применения конденсаторов для Подключение трехфазного двигателя в однофазную цепь вопрос актуальный GPHUD вынесен , применены полевые транзисторы IGBT Мостовая схема управления двигателем постоянного тока Раздел Похожие Мостовая схема состоит из четырех транзисторов некоторые используют МОП что вызовет изменение направления вращения вала двигателя Ответ В объем испытаний входитопределение возможности включения без Частотный преобразователь частотник для асинхронного tokidetru Электрооборудование Электродвигатели Похожие Частотный преобразователь для электродвигателя и принцип работы ключи из IGBT Биполярный транзистор с изолированным затвором, Для работы двигателя нам необходима схема подключения обмоток треугольник Схема подключения электродвигателя, подключение трехфазного Схема подключения электродвигателя во многом определяется условиями его эксплуатации Не найдено транзисторах Схемы подключения трёхфазного двигателя в однофазную сеть Элементы электрики Двигатели Рейтинг , голосов Способы включения трёхфазного двигателя в домашнюю сеть на В Подключение с помощью резисторов, конденсаторов и частотного Видеоурок Моторы и транзисторы РОБОТОША robotosharuarduinovideolessontransistorservodcmotorhtml Похожие Рейтинг голосов июн г Двигатель постоянного тока имеет двухпроводное подключение Скоростью двигателя постоянного тока, можно управлять или, точнее, аналог потенциометра регулятора громкости, и схемы управления Силовой ключ А; В на полевом транзисторе IRF Исполнительные устройства дек г В на полевом транзисторе IRF MOSFET для Arduino , описание, схемы , транзисторе IRF и предназначен для включения выключения скорость работы электродвигателя или яркость светодиодной Подключение трехфазного двигателя к Electroshemaru electroshemaru Энергетика Кроме того, затруднён запуск двигателя под нагрузкой В предлагаемой статье описан метод подключения двигателя без потери мощности Электрические схемы Проводка в квартире и доме своими руками remontrushemaphp Похожие эл схем Например, электрическая схема подключения трехфазных двигателей Основные схемы подключения транзисторов полевых и биполярных Типовые схемы Схемы подключения трёхфазных электродвигателей Датчик вращения Схема самодельного датчика контролирующего wwwtexnicrukonstravtomatikaavtomatikahtml Похожие Датчик вращения двигателя схема на транзисторах Датчик вращения Электродвигатель подключается к самодельной конструкции строго с Электропривод просто, как раз, два, три Часть wwwkiteruarticlespowerel__php автор С Волошин Драйвер мощных транзисторов с полевым управлением предназначен для Рис Схемы включения драйверов Модули драйвера МД, МД, Управление реле с помощью ArduinoArduinodiycom arduinodiycom Arduino для начинающих Похожие Используем транзистор , реле и внешний источник питания для управления мощными внешними Схема подключения транзистора и реле к Arduino Драйверы униполярного и биполярного шагового двигателя mypracticrudrajveryshagovogodvigatelyaunipolyarnyjbipolyarnyjlnhtml Похожие февр г На биполярных транзисторах ключи с такими параметрами создать не Схема подключения униполярного шагового двигателя Частотный преобразователь принцип работы, схема onlineelektrikru Электрооборудование Электродвигатели Похожие Электродвигатель при пуске потребляет большой ток, который Частотный преобразователь принцип работы, схемы подключения и критерии выбора специальные микросхемы управления или инвертор на транзисторах Транзистор Википедия Похожие Транзи́стор англ transistor, полупроводнико́вый трио́д радиоэлектронный компонент Для включения в схему транзистор должен иметь четыре вывода два входных и два выходных накаливания и нагревательных приборов, а также импульсные источники питания, приводы электродвигателей Устройства для пуска электродвигателей или электромашинных wwwfreepatentru МПК Раздел H H HP HP Похожие Коллекторы нечетных транзисторов и эмиттеры четных транзисторов каждого Техническим результатом является упрощение схемы подключения Управление реверсивным электродвигателем Архив Форум АСУ ТП окт г сообщения авторов Имеется асинхронный реверсивный электродвигатель РД Вы привели заводскую схему подключения А про транзисторы Схемы подключения трехфазных электродвигателей дек г Схемы подключения трехфазных электродвигателей Изменение направления вращения электродвигателя Схема реверса Не найдено транзисторах Вместе с схема подключения электродвигателя на транзисторах часто ищут подключение мотора к ардуино через транзистор управление двигателем постоянного тока с помощью arduino arduino управление мощным двигателем управление двигателем постоянного тока реверс управление двигателем постоянного тока шим реверс двигателя постоянного тока на полевых транзисторах arduino драйвер двигателя arduino реверс двигателя Документы Blogger Hangouts Keep Jamboard Подборки Другие сервисы
В отличие от ранее рассматриваемых аналогичных устройств, в данном устройстве обеспечена стабильная частота 50 Гц, мощность потребителей может достигать 600Вт, форма напряжения на выходе синусоида (не идеальная), но электродвигатели мощностью до 600Вт работают устойчиво. Современные преобразователи частоты предлагают гибкий выбор законов регулирования частоты и напряжения на электродвигателе. Порядок выполнения работы Перед выполнением заданий необходимо собрать схему, показанную на рис. 8. Силовые преобразователи в электроснабжении: Методические указания к выполнению лабораторных работ. Страница 3Читать бесплатно книгу онлайн без регистрации в электронном виде на сайте полнотекстовой электронной библиотеки Единое окно для учащихся ВУЗов… quot;ELDINquot; — Ярославский электромашиностроительный завод. Производство электродвигателей, генераторов, комплектных электроприводов, бытовых вентиляторов, насосов. Продажа промышленных насосов, технические характеристики. Предлагаемое устройство собрано на микроконтроллере ATmega853516PI и управляет дверным замком на основе соленоида или электродвигателя. Даны схемы исполнительных устройств для подключения соленоида или электродвигателя, питаемых постоянным напряжение 12 В… Конденсаторные двигатели разновидность асинхронных двигателей , в обмотки которого включены конденсаторы для создания сдвига фазы тока. 1 Подключаются в однофазную сеть посредством специальных схем. Вывод одной обмотки электродвигателя подключается к фазовому… От его местоположения вдоль платы зависит степень генерируемого импульса на ключ, роль ключа выполняет полевой транзистор (на фото выше обозначен как регулятор скорости вращения). Солнечной шестерни, которая закреплена на валу электродвигателя; Для управления же дискретными приборами и модулями других производителей, требующих отрицательного смещения на затворе, может быть рекомендована схема, изображенная на рис. 4.
Как использовать двигатели постоянного тока в Arduino
В этом руководстве вы сможете получить некоторую информацию о двигателях постоянного тока Arduino. Электродвигатель постоянного тока — самый простой из электродвигателей, который используется во всех типах хобби-электроники. В этом руководстве представлена основная информация о двигателях постоянного тока, а также о том, как их подключить. его к вашему Arduino, и как вы можете использовать его с Ozeki 10. Документ также включает диаграммы и видео, которые помогут вам понять концепцию двигателей постоянного тока.Итак, приступим.
Что такое двигатель постоянного тока Arduino?
Двигатель постоянного тока (двигатель постоянного тока) — наиболее распространенный тип двигателя. Двигатели постоянного тока обычно имеют только два вывода, один положительный и один отрицательный. Если вы подключите эти два вывода непосредственно к батарее, двигатель будет вращаться. Если вы поменяете отведения, двигатель будет вращаться в обратном направлении.
Как использовать двигатель постоянного тока Arduino?
Для работы с двигателями постоянного тока вам необходимо подключить три контакта, как показано на схеме подключения. показывает это (Рисунок 1).Один должен быть подключен к земле (Gnd), другой — к мотор к выводу 5В. Третий контакт должен быть подключен к выводу PWM на вашем Ардуино. С подключенным двигателем постоянного тока теперь вы сможете им управлять. Вы можете настроить скорость вращения двигателя в диапазоне от 0 до 255.
Схема подключения двигателя постоянного токаArduino
Рисунок 1 — Схема подключения двигателей постоянного тока Arduino
Как использовать двигатели постоянного тока Arduino в Ozeki
Контроллер двигателя постоянного тока соединяет ваши двигатели постоянного тока с программным обеспечением Ozeki.Вы можете подключить до двух двигателей постоянного тока через любую микросхему драйвера двигателя L298N. Этот чип интегрирован в плату контроллера двигателя постоянного тока LM298, а также в драйвер двигателя постоянного тока Ozeki. Вы можете изменить направление и скорость движения двигателя для обоих двигателей с помощью Ozeki. Электродвигатели должны питаться от внешнего источника питания с максимальным напряжением 36 В. Чтобы использовать двигатель постоянного тока в Ozeki, вам сначала нужно загрузить Ozeki Robot Developer. Озэки Robot Developer установит библиотеки Arduino, необходимые для эффективного использования этого датчика.
Скачать Ozeki Robot Developer
После установки Ozeki Robot Developer вам необходимо загрузить код управления двигателем постоянного тока. к вашему Arduino. Вы можете найти код и инструкции по загрузке на следующих страницах. Процесс загрузки состоит из двух шагов: сначала вам нужно отформатировать EEPROM Arduino, тогда вам нужно загрузить контрольный код. Процедура очень проста, требуется всего лишь несколько секунд.
Загрузите код двигателя постоянного тока в Arduino Uno
Загрузите код двигателя постоянного тока в Arduino Mega 2560
Загрузите код двигателя постоянного тока в Arduino Nano
Загрузите код двигателя постоянного тока в Ozeki Matrix
Загрузите код двигателя постоянного тока в Raspberry Pi
Моторы arduino и Ozeki будут обмениваться данными через порт USB, используя протокол двигателя постоянного тока Ozeki.Этот Протокол позволяет вам использовать мотор прямо на вашем ПК. Вы сможете управлять этим двигателем через Интернет. пользовательский интерфейс или вы сможете общаться с ним с помощью Ozeki Chat. Вы можете узнать больше об управлении чатом на следующей странице.
Как общаться с двигателем постоянного тока с помощью чата
Важно понимать управление чатом, потому что когда вы создаете робота, Вы хотите управлять этим двигателем, отправляя и получая сообщения.если ты откройте приложение Ozeki Robot Developer, вы увидите, кому вы можете написать C # .Net программа для работы с этим мотором.
Шаги подключения
- Подключите двигатель постоянного тока к Arduino
- Подключите плату Arduino к компьютеру
- Проверьте COM-порты, чтобы узнать, подключен ли ваш Arduino
- Загрузите пример кода в Arduino
- Откройте https: // localhost: 9515 в своем браузере
- Выберите подключение вашего двигателя постоянного тока
- Настроить атрибуты двигателя постоянного тока
- Нажмите «Обновить», чтобы проверить двигатель постоянного тока.
Обзор системы
Предлагаемая нами система состоит из двигателя постоянного тока, подключенного к аналоговому порту. вашего Arduino.Arduino будет отвечать за чтение данных с этого устройства. в реальном времени. Мозг системы будет работать на ПК (рисунок 2). На ПК Озэки 10 смогут управлять общением. Вы можете легко запустить Ozeki 10 с помощью веб-браузера.
Рисунок 2 — Конфигурация системы двигателя постоянного тока, подключенного к ПК с помощью Arduino
Предварительные требования
- 1 или 2 малых двигателя постоянного тока
- Ozeki 10 установлен на вашем компьютере
- Программируемая плата (Arduino Mega / Nano / Uno, драйвер двигателя постоянного тока Ozeki или Raspberry Pi)
- Если вы не используете драйвер двигателя постоянного тока Ozeki, то потребуется плата контроллера двигателя постоянного тока LM298.
- USB-кабель необходим между Arduino Mega / Nano / Uno, драйвером двигателя постоянного тока Ozeki и вашим компьютером
Шаг 1. Подключите двигатели постоянного тока к Arduino
Вы можете увидеть, как подключить двигатели постоянного тока на любую из следующих досок:
Ваш браузер не поддерживает видео тег.
После подключения подключите плату к компьютеру!
Шаг 2 — Загрузите код в микроконтроллер
(Вот код для загрузки)
Ваш браузер не поддерживает видео тег.
Шаг 3 — Запустите Ozeki 10, чтобы попробовать двигатели постоянного тока
Ваш браузер не поддерживает видео тег.
Шаг 4. Настройте двигатели постоянного тока в Ozeki 10
Чтобы иметь возможность настраивать двигатели постоянного тока (подключенные к Arduino) в Ozeki 10, который установлен на вашем компьютере вам нужно открыть графический интерфейс пользователя (GUI) Ozeki 10.Вы можете открыть графический интерфейс, введя URL-адрес компьютера в свой веб-браузер. Например, если у нашего ПК IP-адрес 192.168.1.5, мы бы введите http://192.168.1.5:9513 в наш веб-браузер.
Шаг 5 — Изучите протокол двигателей постоянного тока
Контроллер двигателя постоянного тока может связываться с Ozeki через следующий протокол.
Ссылки:
https://www.dummies.com
https://www.tutorialspoint.com
Дополнительная информация
Управление двигателем постоянного тока с использованием сигналов ШИМ — Arduino — Robo India || Учебники || Изучите Arduino |
В этом руководстве Robo India объясняется, как управлять скоростью двигателя постоянного тока с помощью сигналов ШИМ.
1. ВведениеСкорость двигателя постоянного тока в целом прямо пропорциональна напряжению питания, поэтому, если снизить напряжение с 9 вольт до 4,5 вольт, наша скорость станет вдвое меньше той, что была изначально. Но на практике для изменения скорости двигателя постоянного тока мы не можем постоянно изменять напряжение питания. ШИМ-регулятор скорости для двигателя постоянного тока работает путем изменения среднего напряжения, подаваемого на двигатель
. СигналPWM — это, по сути, высокочастотный прямоугольный сигнал (обычно более 1 кГц).Рабочий цикл этой прямоугольной волны варьируется, чтобы изменять мощность, подаваемую на нагрузку.
Входные сигналы, которые мы подаем на ШИМ-контроллер, могут быть аналоговыми или цифровыми в зависимости от конструкции ШИМ-контроллера. Контроллер ШИМ принимает управляющий сигнал и регулирует рабочий цикл сигнала ШИМ в соответствии с требованиями. На приведенной ниже диаграмме показаны формы сигналов, полученные на выходе при различных требованиях напряжения.
В этих волнах частота одинакова, но время включения и выключения разное.
1.2 Требуемое оборудование 1.3 Вывод IC драйвера двигателя L293DДрайвер двигателя — это модуль для двигателей, который позволяет управлять рабочей скоростью и направлением двух двигателей одновременно. Этот драйвер двигателя спроектирован и разработан на основе L293D IC.
L293D — это 16-контактная ИС с восемью контактами на каждой стороне для одновременного управления двумя двигателями постоянного тока. Для каждого двигателя имеется 4 контакта INPUT, 4 контакта OUTPUT и 2 контакта ENABLE.
Контакт 1: Когда Enable1 / 2 находится в HIGH, левая часть IC будет работать, то есть двигатель, подключенный к контактам 3 и 6, будет вращаться.
Контакт 2: Вход 1, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 1.
Контакт 3: Выход 1, этот контакт подключен к одной клемме двигателя.
Контакт 4/5: контакты GND
Контакт 6: Выход 2, этот контакт подключен к одной клемме двигателя.
Контакт 7: вход 2, когда этот контакт ВЫСОКИЙ, ток будет проходить через выход 2.
Контакт 8: VSS, этот контакт используется для подачи питания на подключенные двигатели с максимальным напряжением от 5 В до 36 В в зависимости от подключенного двигателя.
Контакт 9: когда Enable 3/4 находится в HIGH, правая часть IC будет работать, то есть двигатель, подключенный к контакту 11 и контакту 14, будет вращаться.
Контакт 10: вход 4, когда этот контакт ВЫСОКИЙ, ток будет проходить через выход 4.
Контакт 11: Выход 4, этот контакт подключен к одной клемме двигателя.
Контакт 12/13: Контакты GND
Контакт 14: Выход 3, этот контакт подключен к одной клемме двигателя.
Контакт 15: Вход 3, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 3.
Контакт 16: VCC, для питания IC, например, 5 В.
2. Соединения с Arduino
1. Модуль 5V (VCC) — Arduino 5V.
2. Модуль GND — Arduino GND.
3. Модуль 1 — Arduino D8.
4. Модуль 2 — Arduino D9.
5. Модуль 3 — Arduino D10.
6. Модуль 4 — Arduino D11.
7.Модуль EN12 — Arduino D5.
8. Модуль EN34 — Arduino D6.
9. Модуль двигателя Винтовые клеммы — двигатели постоянного тока.
10. Модуль VSS power Винтовой зажим — Внешний источник питания 9В.
Обязательно удалите предустановку перемычки на контактах включения модуля, чтобы мы могли подключить вход ШИМ к этому контакту и контролировать скорость двигателей. Если мы соединим эти контакты с землей, то мотор отключится.
3. Программирование:Вот код для запуска этой схемы.
Вы можете загрузить этот код (Arduino Sketch) отсюда.
// Учебное пособие от RoboIndia по управлению двигателем с использованием сигналов ШИМ
// Требуемое оборудование: драйвер двигателя (от RoboIndia и Arduino)
// Мотор A
const int inputPin1 = 10; // Вывод 15 микросхемы L293D
const int inputPin2 = 11; // Вывод 10 микросхемы L293D
// Мотор B
const int inputPin3 = 9; // Вывод 7 микросхемы L293D
const int inputPin4 = 8; // Вывод 2 микросхемы L293D
int EN1 = 5; // Вывод 1 микросхемы L293D
int EN2 = 6; // Вывод 9 микросхемы L293D
установка void ()
{
pinMode (EN1, ВЫХОД); // где двигатель подключен к
pinMode (EN2, ВЫХОД); // где двигатель подключен к
pinMode (inputPin1, ВЫХОД);
pinMode (inputPin2, ВЫХОД);
pinMode (inputPin3, ВЫХОД);
pinMode (inputPin4, ВЫХОД);
Серийный .begin (9600);
Serial .println («Введите значения от 0 до 255»);
}
пустой цикл ()
{
если ( серийный . доступный ())
{
int speed = Serial .parseInt (); // Получение значения от последовательного монитора
Серийный .println (скорость)
analogWrite (EN1, скорость); // устанавливает скорость двигателей
analogWrite (EN2, скорость); // устанавливает скорость двигателей
digitalWrite (inputPin1, HIGH);
digitalWrite (inputPin2, LOW);
digitalWrite (inputPin3, HIGH);
digitalWrite (inputPin4, LOW);
}
}
4.Выход После подключения вы скопируете и вставите этот код в Arduino IDE, а затем загрузите код. Откройте Serial Monitor и отправьте входные значения в Arduino. Вы можете контролировать скорость двигателя постоянного тока, отправляя различные значения в диапазоне от 0 до 255.
Если у вас есть какие-либо вопросы, напишите нам по адресу [email protected]
С уважением и уважением
Команда разработки контента
Robo India
https: // roboindia.ком
Управление двигателем постоянного тока Arduino с использованием драйвера двигателя L298N — ШИМ
В этом проекте мы увидим, как управлять двигателем постоянного тока с помощью Arduino и драйвера двигателя L298N. Существуют разные способы управления двигателем постоянного тока, но управление двигателем постоянного тока Arduino с использованием драйвера двигателя L298N становится довольно популярным по многим причинам.
Обзор
Двигатель постоянного тока — самый простой из двигателей, с которыми сталкиваются новички и любители. Управлять им очень просто: подключите два вывода двигателя к двум клеммам аккумулятора и вуаля! Ваш мотор начинает вращаться.
Если переключить провода, т.е. поменять полярность, двигатель будет вращаться в обратном направлении. Это так просто.
Если вы хотите контролировать скорость вращения простого двигателя постоянного тока, существует метод, называемый ШИМ-управление двигателем постоянного тока. Широтно-импульсная модуляция или сигнал ШИМ, генерируемый этим методом, позволит нам контролировать среднее напряжение, которое подается на двигатель постоянного тока.
Управление скоростью двигателя постоянного тока с помощью ШИМ
При использовании метода ШИМ среднее значение напряжения, подаваемого на двигатель постоянного тока, регулируется путем включения и выключения питания с очень высокой скоростью.Частота этого переключения будет порядка нескольких десятков килогерц.
Теперь среднее напряжение, подаваемое на двигатель постоянного тока, будет зависеть от так называемого рабочего цикла сигнала ШИМ. Рабочий цикл сигнала ШИМ — это не что иное, как отношение времени, в течение которого сигнал находится в состоянии ВКЛ или ВЫСОКИЙ, к общему периоду времени сигнала, то есть сумме времени включения и времени выключения.
Рабочий цикл обычно выражается в процентах, а на следующем рисунке представлены различные сигналы ШИМ источника питания 12 В с различными рабочими циклами: 0%, 25%, 50%, 75% и 100% соответственно.
Теперь, когда мы контролировали среднее напряжение, которое должно подаваться на двигатель постоянного тока, как нам подать это напряжение на двигатель? А вот и использование транзистора.
Сигнал ШИМ от любого источника, такого как Arduino в этом примере, может подаваться на затвор полевого МОП-транзистора, и в зависимости от рабочего цикла сигнала ШИМ скорость двигателя постоянного тока будет изменяться.
На следующем изображении показана простая принципиальная схема, где ШИМ-выход от Arduino подается на полевой МОП-транзистор, а двигатель постоянного тока 12 В подключен через полевой МОП-транзистор.
Код этой цепи приведен ниже. Используя этот код, Arduino будет изменять скорость двигателя постоянного тока постепенно, то есть постепенно увеличивает скорость до пика, а затем постепенно снижает скорость до остановки.
Код
Эта схема хороша для управления скоростью двигателя, но не является эффективным способом изменения направления вращения. Для изменения направления вращения без того, чтобы каждый раз менять местами выводы двигателя, вам необходимо использовать специальную схему под названием H-Bridge.
Управление двигателем постоянного тока с помощью Н-моста
Н-мост — это простая электронная схема, состоящая из четырех переключающих элементов, таких как транзисторы (BJT или MOSFET), которые могут управлять двигателем в обоих направлениях без переключения выводов.
Название «H-Bridge» относится к виду соединения, состоящего из четырех транзисторов и двигателя в центре, образующего букву «H».
Ниже показано простое соединение H-Bridge с использованием четырех транзисторов и двигателя. Активируя одновременно два конкретных транзистора, мы можем контролировать поток тока через двигатель и, следовательно, направление вращения.
Два управляющих входа A и B в приведенной выше схеме определяют направление вращения двигателя. Если A — НИЗКИЙ, а B — ВЫСОКИЙ, транзисторы Q1 и Q4 будут включены и позволят току течь через двигатель в определенном направлении.
Если на управляющем входе A установлено ВЫСОКОЕ значение, а на B — НИЗКОЕ, тогда транзисторы Q2 и Q3 включатся, и ток через двигатель изменится на противоположное, а значит, и направление вращения.
Объединив обе функции i.е. Технология PWM для управления скоростью и соединение H-Bridge для управления направлением, вы можете полностью контролировать двигатель постоянного тока.
Использовать транзисторы для эффективного подключения H-Bridge утомительно. Для этой цели на рынке доступны специализированные ИС драйвера двигателя с Н-мостом, и две распространенные ИС — это L293D и L298N.
Мы уже видели, как управлять скоростью двигателя постоянного тока с помощью L293D в более раннем проекте. В этом проекте мы сосредоточимся на более продвинутом драйвере двигателя L298N и рассмотрим управление двигателем постоянного тока Arduino с использованием драйвера двигателя L298N с использованием технологии ШИМ.
Также прочтите УПРАВЛЕНИЕ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА С ARDUINO И L293D
Краткое примечание о драйвере мотора L298N
ИС драйвера мотора L298N представляет собой 15-выводную высоковольтную, сильноточную ИС драйвера мотора с двумя полными мостовыми драйверами. Логические уровни микросхемы L298N совместимы со стандартным TTL и могут использоваться для управления различными индуктивными нагрузками, такими как двигатели постоянного тока, шаговые двигатели, реле и т. Д.
На следующем изображении показана схема выводов микросхемы L298N в мультиваттном корпусе (мульти Ведущий силовой агрегат).
Поскольку ИС драйвера двигателя L298N представляет собой двойную ИС полного моста, вы можете управлять двумя двигателями одновременно с помощью отдельных входов. Напряжение питания логики составляет 5 В, но напряжение питания двигателя может достигать 45 В. Максимальный выходной ток на канал составляет 2 А.
Как правило, драйвер L298N доступен в виде модулей, которые содержат все необходимые компоненты и разъемы для управления двумя двигателями постоянного тока. Один из таких модулей показан ниже. Я объясню несколько важных компонентов этого модуля.
Модуль драйвера двигателя L298N состоит из двух 2-контактных клеммных колодок с винтовыми зажимами для подключения двух двигателей. Он также имеет шесть штыревых разъемов для подключения двух разрешающих входов и четырех входных контактов (по два на каждый двигатель).
Имеется 3-контактная клеммная колодка с винтовыми зажимами, через которую необходимо подать напряжение питания на двигатель. Если используемые двигатели рассчитаны на 12 В или меньше, то питание 12 В подается через этот винтовой зажим, а встроенный регулятор 5 В будет обеспечивать питание логики 5 В на микросхему L298N.
Вы также можете получить доступ к этому регулируемому напряжению 5 В через третий контакт 3-контактной винтовой клеммной колодки. Перемычка, расположенная рядом с 3-контактной винтовой клеммой, должна быть включена для напряжений питания до 12 В, поскольку эта перемычка включает встроенный регулятор. Выход 5 В с третьего контакта 3-контактной винтовой клеммы доступен только при установленной перемычке, т. Е. Напряжение питания составляет 12 В. Этот выход 5 В может использоваться для питания вашей платы Arduino.
Если напряжение питания больше 12 В, снимите перемычку, так как это может повредить регулятор.В этом случае логическое питание 5 В на микросхему L298N подается через третий контакт 3-контактной винтовой клеммы.
Управление двигателем постоянного тока Arduino с использованием L298N
Теперь мы рассмотрим простую схему, в которой мы контролируем скорость и направление двигателя постоянного тока с помощью Arduino и L298N IC. Для этого проекта вам понадобится несколько дополнительных компонентов, их полный список приведен ниже. В системе управления двигателем постоянного тока Arduino с использованием проекта L298N мы будем контролировать обе функции простого двигателя постоянного тока, т.е.скорость и направление вращения с использованием комбинации сигнала ШИМ и L298N (H-мост).
Принципиальная схема
Необходимые компоненты
- Arduino UNO [Купить здесь]
- L298N Модуль драйвера двигателя [Купить здесь]
- Двигатель постоянного тока 12 В
- Потенциометр 100 кОм
- Кнопка
- Источник питания 12 В
- Макетная плата
- Соединительные провода
Код
Приложения
- Управление двигателем постоянного тока Arduino с использованием драйвера двигателя L298N может быть начальным этапом многих сложных проектов.
- Почти у всех роботов есть колеса, и нам нужно управлять двигателями, подключенными к этим колесам. Следовательно, любой робот на базе Arduino может реализовать этот тип управления двигателем с помощью L298N.
- Некоторыми роботизированными приложениями драйвера двигателя L298N являются робот, управляемый жестами руки, робот-следователь, робот для обхода препятствий и т. Д.
Двигатель постоянного тока с Arduino с использованием L298N и управление его скоростью с помощью PWM
Двигатель постоянного тока (DC) — это тип электрической машины, преобразующей электрическую энергию в механическую.Поглощает электричество через постоянный ток и преобразует его в механическое вращение. Обмотки, запитанные электрическим током, создают магнитные поля, которые приводят в движение магниты, подключенные к ротору (вращающаяся часть машины, которая генерирует или передает энергию, определяется как ротор). Затем ротор преобразует и передает движение магнитов на вал двигателя. Скорость вращения зависит как от входной мощности, так и от конструкции двигателя. Здесь мы собираемся управлять направлением и скоростью двигателя постоянного тока с помощью Arduino, используя L298N и PWM
. 1.КОНЦЕПЦИИ Работа двигателя постоянного токаОбычный двигатель постоянного тока создает крутящий момент, используя электромагнитные силы, используя принцип, согласно которому, когда проводник с током помещается в магнитное поле, он испытывает механическую силу. Когда проводник с током помещается в магнитное поле, он испытывает крутящий момент и стремится двигаться. Другими словами, когда магнитное поле и электрическое поле взаимодействуют, возникает механическая сила. Двигатель постоянного или постоянного тока работает по этому принципу.Это называется автомобильным движением.
Рисунок 1: Поперечное сечение двигателя постоянного токаКонструктивно и конструктивно двигатель постоянного тока в точности аналогичен генератору постоянного тока, но электрически противоположен. Здесь, в отличие от генератора, мы подаем электрическую энергию на входной порт и получаем механическую энергию из выходного порта. Направление вращения этого двигателя задается правилом левой руки Флеминга, которое гласит, что если указательный палец, средний палец и большой палец вашей левой руки вытянуты взаимно перпендикулярно друг другу и если указательный палец представляет направление движения В магнитном поле средний палец указывает направление тока, затем большой палец представляет направление, в котором сила действует на вал двигателя постоянного тока.
L298N Микросхема драйвера двигателяТок, необходимый для двигателей, которые мы используем, довольно высок по сравнению с максимальным выходным током контактов Arduino (40 мА). Кроме того, двигатели потребляют много тока из-за их механического движения. Таким образом, даже если программа верна, двигатели все равно не будут работать правильно, если вы подключите их напрямую к плате Arduino. Поэтому мы должны использовать микросхему драйвера двигателя, такую как L298N, для управления нашими двигателями, используя сигнал от Arduino.
Рисунок 4: Подключение ИК-датчика к Arduino
Эта ИС драйвера двигателя имеет четыре входных контакта (IN1, IN2, IN3 и IN4), с которых вы можете подавать сигнал, четыре выходных контакта (OUT1, OUT2, OUT3 и OUT4) для подключения двух двигателей с обеих сторон и два контакта включения ( ENA и ENB) для управления скоростью двигателей. В качестве бонуса он также может управлять шаговым двигателем. Вот спецификации микросхемы драйвера двигателя L298N.
- Рабочее напряжение питания до 46 В
- Общий постоянный ток до 4 А
- Максимальный ток питания двигателя: 2 А на двигатель.
- Встроенный регулятор мощности 5 В
- Низкое напряжение насыщения
- Защита от перегрева
- Логический «0» Входное напряжение до 1,5 В (высокая помехоустойчивость)
Назначение H-моста — обеспечить изменение направления тока в нагрузке. Он используется для установки вращения двигателя постоянного тока по часовой стрелке, а не против часовой стрелки. Для его работы, в отличие от других решений, требуется единый блок питания.H-мост использует 4 транзистора, два из которых типа NPN и два типа PNP, как показано ниже.
Случай 1: H-образный мост; Вращение ротора вправо Случай 2: H-образный мост; Вращение влево от ротораВходной сигнал подается на клеммы T1, T2, T3 и T4 H-моста. Когда T1 и T2 — ВЫСОКИЕ, а T3 и T4 — НИЗКИЕ (Случай 1), тогда T2 и T3 начинают проводить ток, заставляя двигатель вращаться влево. Таким же образом, когда T1 и T2 имеют НИЗКОЕ значение, а T3 и T4 — ВЫСОКОЕ (Случай 2), тогда T1 и T4 начинают проводить ток, заставляя двигатель вращаться вправо.Используя этот принцип внутри микросхемы драйвера двигателя L298N, мы можем управлять направлением двух двигателей благодаря двойным схемам H-Bridge внутри нее. Следовательно, используя драйвер L298N (рисунок 4), мы можем управлять двигателем A с помощью IN1, IN2 и двигателем B с помощью IN3, IN4. В таблице 1 ниже показаны все возможные направления обоих двигателей в соответствии с подаваемым сигналом.
| Входной сигнал (IN1, IN2 ) | Направление двигателя (ДВИГАТЕЛЬ A ) | Входной сигнал (IN3, IN4 900 Направление (ДВИГАТЕЛЬ B) | ||||||||||
| 0, 0 | упор | 0, 0 | упор, | |||||||||
| 1, 0 | по часовой стрелке | 1, 0 | по часовой стрелке, 1 | по часовой стрелке 1, 0 | против часовой стрелки | 0, 1 | против часовой стрелки | |||||
| 1, 1 | стоп | 1, 1 | стоп |
c Оба контакта двигателя неполярны, поэтому вы должны вручную убедиться, что когда IN1, IN2 и IN3, IN4 равны 1, 0 и 1, 0 соответственно, оба двигателя должны вращаться по часовой стрелке.
Управление скоростью двигателя постоянного тока с помощью Arduino с использованием ШИМИзменяя входное напряжение на контакте включения A (ENA) и контакте включения B (ENB), мы можем управлять скоростью двигателя A и B соответственно. Это можно сделать с помощью ШИМ или широтно-импульсной модуляции
.PWM — это метод, используемый для создания прямоугольной импульсной волны, сигнал переключается между ВКЛ и ВЫКЛ. Этот шаблон включения и выключения может имитировать напряжения между полным включением (5 В) и полным выключением (0 В). Результирующее напряжение называется рабочим циклом.В Arduino это можно сделать, вызвав функцию analogWrite (). Вызов analogWrite () находится в диапазоне от 0 до 255, так что analogWrite (255) запрашивает рабочий цикл 100% (всегда включен), а analogWrite (127) — это рабочий цикл 50% (в половине случаев).
Вы должны проверить наименьшее значение ШИМ для вашего двигателя, при котором он начнет вращаться. (см. раздел FAQ)
2. КОМПОНЕНТЫ 3. ПОДКЛЮЧЕНИЯРисунок 3: Подключение двигателей с использованием микросхемы драйвера двигателя L293D с Arduino
4.ПРОГРАММЫ Программа 1: Управление направлением двигателя постоянного тока с помощью Arduino с использованием микросхемы драйвера двигателя L298N / * UNCIA ROBOTICS | www.unciarobotics.com
ПРОГРАММА: УПРАВЛЕНИЕ НАПРАВЛЕНИЕМ ДВИГАТЕЛЕЙ С ПОМОЩЬЮ L298N
Направление управления двумя двигателями с помощью микросхемы драйвера двигателя L298N
Подключения:
Arduino L298N Arduino L298N
3 ENA 9 ENB
4 В1 5 В2
6 IN3 7 IN4
* /
const int ENA = 3, ENB = 9; // Выводы ШИМ для управления скоростью
const int IN1 = 4, IN2 = 5, IN3 = 6, IN4 = 7; // выводы INPUT
void setup () {
pinMode (IN1, ВЫХОД); // Сделайте IN1, IN2, IN3, IN4 как ВЫХОДНЫЕ контакты
pinMode (IN2, ВЫХОД);
pinMode (IN3, ВЫХОД);
pinMode (IN4, ВЫХОД);
analogWrite (ENA, 255); // устанавливаем максимальную скорость
analogWrite (ENB, 255);
}
void loop () {
digitalWrite (IN1, HIGH); // вращаем оба мотора
digitalWrite (IN2, LOW);
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
задержка (2000); // ждем некоторое время
digitalWrite (IN1, LOW); // меняем направление вращения
digitalWrite (IN2, HIGH);
digitalWrite (IN3, LOW);
digitalWrite (IN4, HIGH);
задержка (2000); // ждем некоторое время
}
Программа 2: Управление скоростью двигателя постоянного тока с помощью Arduino с использованием микросхемы драйвера двигателя L298N / * UNCIA ROBOTICS | www.unciarobotics.com
ПРОГРАММА: УПРАВЛЕНИЕ СКОРОСТЬЮ ДВИГАТЕЛЕЙ С ПОМОЩЬЮ L298N
Управление скоростью двух двигателей с помощью микросхемы драйвера двигателя L298N.
Подключения:
Arduino L298N Arduino L298N
3 ENA 9 ENB
4 В1 5 В2
6 IN3 7 IN4
* /
const int ENA = 3, ENB = 9; // Выводы ШИМ для управления скоростью
const int IN1 = 4, IN2 = 5, IN3 = 6, IN4 = 7; // выводы INPUT
void setup () {
pinMode (IN1, ВЫХОД); // Сделайте IN1, IN2, IN3, IN4 как ВЫХОДНЫЕ контакты
pinMode (IN2, ВЫХОД);
pinMode (IN3, ВЫХОД);
pinMode (IN4, ВЫХОД);
}
void loop () {
for (int i = 0; i <= 255; i = i + 5) // увеличиваем скорость
{analogWrite (ENA, я);
analogWrite (ENB, i);
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
задержка (10);
}
for (int i = 255; i> = 0; i = i - 5) // уменьшаем скорость
{analogWrite (ENA, я);
analogWrite (ENB, i);
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
задержка (10);
}
}
Программа 3: Ускорение и замедление двигателя постоянного тока с Arduino с использованием L298N линейно с использованием millis () / * UNCIA ROBOTICS | www.unciarobotics.com
ПРОГРАММА: ЛИНЕЙНО УСКОРЕНИЕ И ЗАМЕДЛЕНИЕ ДВИГАТЕЛЕЙ
Ускорение и замедление двигателей постоянного тока с использованием L298N линейно
с использованием ШИМ (широтно-импульсной модуляции) и функции millis ()
Подключения:
Arduino L298N Arduino L298N
3 ENA 9 ENB
4 В1 5 В2
6 IN3 7 IN4
* /
const int ENA = 3, ENB = 9; // Выводы ШИМ для управления скоростью
const int IN1 = 4, IN2 = 5, IN3 = 6, IN4 = 7; // выводы INPUT
unsigned long currentTime; // переменная для хранения текущего времени
беззнаковый длинный prevTime = 0; // переменная для хранения предыдущего времени
int threshold = 30; // порог времени в миллисекундах
int acc = 0; // переменная для хранения значения acc
int accDirection = 1; // сохранить направление ускорения
void setup () {
pinMode (IN1, ВЫХОД); // IN1, IN2, IN3, IN4 в качестве ВЫХОДНЫХ контактов
pinMode (IN2, ВЫХОД);
pinMode (IN3, ВЫХОД);
pinMode (IN4, ВЫХОД);
Серийный .begin (9600); // Запуск последовательной связи
}
void loop () {
currentTime = миллис (); // сохраняем значение функции millis ()
если ((currentTime - prevTime)> = порог)
{ Serial .print («Порог:»); // выводим вычисленное значение
Серийный .print (currentTime - prevTime);
Серийный номер .print ('\ t');
if (acc <255 || acc> 0) // если acc находится в пределах
{ Serial .print ("Acc:"); // выводить значение ускорения
Серийный .печать (соотв.);
Серийный номер .println ("");
analogWrite (ENA, acc); // записываем значение acc на ENA
analogWrite (ENB, acc); // записываем значение acc на ENB
acc = acc + accDirection; // увеличение / уменьшение в соответствии с
prevTime = currentTime;
}
if (acc == 255 || acc == 0) // если acc достигает конечных точек
{ Serial .println («изменение направления»);
accDirection = accDirection * (-1); //изменить направление
}
}
digitalWrite (IN1, HIGH); // вращаем оба мотора
digitalWrite (IN2, LOW);
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
}
Программа 4: Ускорение и замедление двигателя постоянного тока с Arduino с использованием L298N экспоненциально с использованием millis () / * UNCIA ROBOTICS | www.unciarobotics.com
ПРОГРАММА: ЭКСПОНЕНЦИАЛЬНО Ускорение и замедление двигателей.
Ускорение и замедление двигателей постоянного тока с использованием L298N
экспоненциально с использованием ШИМ и функции millis ().
Подключения:
Arduino L298N Arduino L298N
3 ENA 9 ENB
4 В1 5 В2
6 IN3 7 IN4
* /
const int ENA = 3, ENB = 9; // Выводы ШИМ для управления скоростью
const int IN1 = 4, IN2 = 5, IN3 = 6, IN4 = 7; // выводы INPUT
unsigned long currentTime; // сохраняем текущее время
беззнаковый длинный prevTime = 0; // сохраняем предыдущее время
int threshold = 200; // временной интервал в миллисекундах
int acc = 0; // начальное ускорение
int power = 0; // экспоненциальная степень
int accDirection = 1; // начальное направление соотв.
void setup () {
pinMode (IN1, ВЫХОД); // IN1, IN2, IN3, IN4 в качестве ВЫХОДНЫХ контактов
pinMode (IN2, ВЫХОД);
pinMode (IN3, ВЫХОД);
pinMode (IN4, ВЫХОД);
Серийный .begin (9600); // запускаем последовательную связь
}
void loop () {
currentTime = миллис (); // сохраняем значение функции millis ()
если ((currentTime - prevTime)> = порог)
{ Serial .print («Порог:»); // выводим пороговое значение
Серийный .print (currentTime - prevTime); Серийный номер .print ('\ t');
if (power <8 || power> 0) // мощность в пределах
{ Serial .print («Power:»); // выводить значение ускорения
Серийный .печать (соотв.); Серийный номер .print ('\ t');
analogWrite (ENA, acc);
analogWrite (ENB, acc);
мощность = мощность + направление; // увеличить / уменьшить мощность
acc = pow (2, мощность); // меняемся по экспоненциальному закону
Серийный номер .print ("Acc:");
Серийный номер . Печать (в соотв.); Серийный номер .println ("");
prevTime = currentTime;
}
if (power == 8 || power == 0) // мощность достигает конечных точек
{ Serial .println («изменение направления»);
accDirection = accDirection * (-1); //изменить направление
}
}
digitalWrite (IN1, HIGH); // вращаем оба мотора
digitalWrite (IN2, LOW);
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
}
5.ИСПОЛЬЗУЕМЫЕ ФУНКЦИИ 6. Часто задаваемые вопросы Для чего нужны двигатели постоянного тока?
Роботы
Двигатели постоянного тока в роботах управляют чем-то вроде рельсов, рычагов или камер. Двигатели постоянного тока особенно удобны благодаря своему КПД и высокому крутящему моменту, идеально подходят для робототехники.
Игрушки
Двигатели постоянного тока очень популярны среди производителей детских игрушек. Малые двигатели постоянного тока используются в вагонах с дистанционным управлением и моделях поездов. Их популярность объясняется простотой использования и надежностью.Наличие различных вариантов напряжения позволяет использовать двигатели постоянного тока в игрушках, которым для выполнения различных движений требуются самые разные скорости. Некоторые из них также подключены к контроллеру.
Электромобили
Среди различных типов двигателей, устанавливаемых в электромобили, электродвигатели постоянного тока считаются одними из самых эффективных и долговечных. В дополнение к крупным производственным предприятиям, механики и энтузиасты DIY также предпочитают двигатели постоянного тока, особенно серийного типа.
Электровелосипеды
Электровелосипеды своим успехом обязаны тому факту, что для них не требуются особые водительские права. Фактически максимальная скорость составляет менее 25 км / ч. Двигатель компактно встроен в ступицу заднего или переднего колеса или установлен в центре велосипеда и соединен с шестерней педали.
требуется минимальный пороговый рабочий цикл или сигнал ШИМ, после которого они начнут работать.Таким образом, вы должны вручную проверить, какое минимальное значение порогового значения ШИМ, при котором ваш двигатель начнет работать.
Это можно сделать, загрузив следующую программу:
/ * ПРИМЕР ПРОГРАММЫ ДЛЯ ПРОВЕРКИ МИНИМАЛЬНОГО ПОРОГА ДЛЯ РАБОТЫ
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА*/
const int ENA = 3, ENB = 9; // Выводы ШИМ для управления скоростью
const int IN1 = 4, IN2 = 5, IN3 = 6, IN4 = 7; // выводы INPUT
void setup () {
pinMode (IN1, ВЫХОД); // Сделайте IN1, IN2, IN3, IN4 как ВЫХОДНЫЕ контакты
pinMode (IN2, ВЫХОД);
pinMode (IN3, ВЫХОД);
pinMode (IN4, ВЫХОД);
Серийный .begin (9600);
}
void loop () {
for (int i = 0; i <= 255; i = i + 5) // увеличиваем скорость
{ Serial .print («Значение ШИМ:»); Серийный номер .println (i);
Серийный номер .println ("");
analogWrite (ENA, я); // записываем значение PWM на Enable PIN A
analogWrite (ENB, i);
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
задержка (1000);
}
}
После загрузки программы нажмите Ctrl + shift + M в окнах, чтобы открыть последовательный монитор и найти минимальные значения ШИМ, при которых моторы начнут вращаться.Запишите эти значения и используйте их как минимальные значения ШИМ во всех программах соответственно.
Можно ли использовать потенциометр вместо сигнала ШИМ для изменения скорости модуля драйвера двигателя Motors L298N?Да, в обоих случаях будет работать. Вы можете использовать сигнал PWM от Arduino или использовать потенциометр на этих контактах Enable для изменения скорости двигателей. Единственная разница будет заключаться в том, что потенциометр будет уменьшать мощность, выбрасывая ее в виде тепла, поэтому это не лучшее решение для приводов двигателей, где текущее требование больше.
Широтно-импульсная модуляция (PWM), с другой стороны, управляет мощностью, быстро включая и выключая ее. Так быстро, что нагрузка, потребляющая энергию, не заметит. Допустим, у вас есть двигатель на 12 В, который потребляет максимум 1 Ампер. Вместо того, чтобы пытаться найти горшок на 1 А, который будет очень горячим, вы можете вместо этого использовать ШИМ для быстрого переключения с 0 В на 12 В более 10 000 раз в секунду.
Двигатель грохочет, видя только среднюю мощность, которая зависит только от рабочего цикла. Это процентное соотношение рабочего времени и нерабочего времени.Половина включения и половина скидки составляет 50%. Чем выше процент, тем выше средняя мощность и скорость. Меньший рабочий цикл даст вам меньшую среднюю мощность и меньшую скорость. Все это время ваш силовой транзистор PWM только переходит от полностью выключенного к полностью включенному и почти не вспотел. Это связано с тем, что транзисторы очень эффективны, когда они полностью включены или полностью выключены, а не в промежуточном состоянии.
Следует отметить, что потенциометр хорош для небольших нагрузок, но неэффективен. ШИМ великолепен и действительно необходим для больших нагрузок.
Все еще сомневаетесь?Задайте свои вопросы относительно двигателя постоянного тока с Arduino с использованием L298N и PWM в разделе комментариев ниже или свяжитесь с нами.
Двигатель постоянного тока с Arduino Двигатель постоянного тока с Arduino с использованием L298N и PWM
Как подключить драйвер двигателя к Arduino Uno?
Подключить драйвер двигателя к Arduino Uno относительно просто. Чтобы лучше понять весь процесс, мы будем использовать микросхему моста L298 для подключения к Arduino Uno, что позволит вам управлять двигателем постоянного тока.Обычно двигатель постоянного или постоянного тока считается наиболее часто используемым типом двигателя.
Двигатель постоянного тока оборудован двумя выводами: один отрицательный, а другой — положительный. Когда вы подсоединяете два провода напрямую к аккумулятору, ваш двигатель начинает вращаться.
Если вы переключите провода, ваш двигатель начнет вращаться в противоположном направлении. Чтобы лучше понять, в сегодняшней статье мы обсудим, как подключить драйвер двигателя к Arduino Uno.
Обзор
Чтобы управлять направлением вращения вашего двигателя постоянного тока без необходимости менять соединение выводов, вы можете рассмотреть возможность использования схемы, обычно называемой H-мостом. H-мост — это схема, которая приводит в движение двигатель в обоих направлениях.
H-мост используется в различных приложениях, таких как управление роботами (часто это его основное приложение). Он называется H-мостом, поскольку в нем используются четыре транзистора, соединенных так, что схематическая диаграмма будет выглядеть как буква H.
Вы можете рассмотреть возможность использования дискретных транзисторов для создания этой схемы; однако в сегодняшней статье мы будем использовать H-мостовую ИС L298. Эта схема H-моста способна управлять скоростью, направлением вашего двигателя постоянного тока, а также шаговых двигателей.
Кроме того, он может управлять двумя двигателями одновременно. Он оборудован номинальным током 2А для каждого двигателя. Однако при таких токах вам потребуется использовать радиаторы.
Требования
Когда дело доходит до подключения драйвера двигателя к Arduino Uno, вам потребуются следующие вещи:
- Двигатель постоянного тока
- Arduino Uno
- L298 мост IC
- Макетная плата
- 10 перемычек
Подключение драйвера двигателя к Arduino Uno
После выполнения всех требований подключите драйвер двигателя к Arduino Uno.В этом уроке мы будем подключать один двигатель к Arduino Uno. Для этого вы подключите Arduino к входу 1, который является контактом 5, затем к входу 2, который является контактом 7, и, наконец, к Enable 1, который является контактом 6 вашей ИС L298 H-моста.
Выводы 5 и 7 предназначены для цифровых входов; то есть как выключенные, так и включенные входы. С другой стороны, для вывода 6 требуется ШИМ или сигнал с широтно-импульсной модуляцией, который помогает контролировать скорость двигателя.
Вход 1 контактной платы H-моста L298 будет подключен к контакту 8 вашего Arduino Uno, а вход 2 будет подключен к контакту 9.Оба вывода являются цифровыми выводами вашего Arduino Uno и помогают управлять направлением вашего двигателя.
Enabled Вывод микросхемы L298 будет подключен к выводу 2 с широтно-импульсной модуляцией (PWM) вашего Arduino Uno. Контакт 2 поможет контролировать скорость вашего двигателя. Чтобы установить значения выводов 8 и 9 вашего Arduino, вам нужно будет использовать функцию digitalWrite (). Более того, когда дело доходит до значения настройки вывода 2, вам придется использовать функцию analogWrite ().
Подключите компоненты! 🙂Настройка управления двигателем Arduino Uno
- Сначала вы подключите 5-вольтовый вывод и заземление (GND) вашей H-мостовой ИС L298 к 5-вольтовому и заземленному (GND) вашего Arduino Uno.
- Подключите драйвер двигателя к контактам 3 и 2 H-моста IC L298.
- После этого вы подключите Вход 1 своей ИС H-моста L298 к контакту 8 Arduino Uno.
- Вход 2 ИС H-моста L298 будет подключен к контакту 9 Arduino Uno.
- Затем вы подключите Enable 1 вашей ИС H-моста L298 к контакту 2 Arduino Uno
- Измерение тока Контакт ИС H-моста L298 будет подключен к GND
- Используя кабель USB Arduino, вы подключитесь свой Arduino Uno, а затем загрузите программу на свой Arduino с помощью веб-редактора Arduino или Arduino IDE.
- Подайте питание на плату Arduino Uno с помощью надежного источника питания, USB-кабеля или аккумулятора.
Как только это будет сделано, ваш привод двигателя будет вращаться по часовой стрелке примерно 3 секунды, а затем будет вращаться против часовой стрелки еще на 3 секунды.
Управление драйвером двигателя постоянного тока
Чтобы иметь полный контроль над приводом двигателя постоянного тока, вам необходимо контролировать скорость, а также вращение. Обычно это достигается сочетанием двух жизненно важных методик:
- Н-образный мост. Это жизненно важно для управления направлением вращения
- PWM. Идеально подходит для управления скоростью вашего двигателя.
Обычно скорость драйвера двигателя постоянного тока регулируется с использованием переменного входного напряжения, и ШИМ считается распространенным методом, используемым для достижения этой цели с максимальной легкостью. В методе ШИМ среднее значение входного напряжения регулируется путем отправки серии импульсов включения и выключения.
С другой стороны, H-мост помогает контролировать направление вращения двигателя постоянного тока.Это достигается изменением полярности входного напряжения. Схема H-моста оснащена четырьмя переключателями и двигателем в центре, образующими H-образную схему.
Заключительные мысли
ИС L298 H-bridge — это двунаправленный драйвер двигателя, который относительно прост в эксплуатации и подключается к плате Arduino Uno. Как новичок, этот драйвер двигателя с Н-мостом позволит вам легко и независимо управлять двумя разными двигателями, каждый из которых имеет ток до 2 А в разном направлении.
Этот модуль лучше всего подходит для использования в роботизированных приложениях; в дополнение к этому, он подходит для подключения к микроконтроллеру, требующему нескольких линий управления на двигатель.
Прочитав эту статью, вы обнаружите, что весь процесс относительно прост и может быть выполнен любым человеком, независимо от уровня его навыков.
Когда мы подходим к заключению, мы надеемся, что эта статья окажется для вас очень полезной при попытке подключить драйвер двигателя к плате Arduino Uno.Все, что от вас требуется, — это иметь все необходимые инструменты, чтобы сделать это возможным.
Arduino uno управляет двигателем постоянного тока в обоих направлениях, вперед и назад, используя драйвер двигателя L293d h-bridge
В этом уроке я собираюсь научить вас управлять небольшим двигателем постоянного тока с помощью Arduino Uno, используя микросхему драйвера двигателя L293D h-bridge. Я буду контролировать направление вращения (по часовой и против часовой стрелки) двигателя постоянного тока с помощью контроллера драйвера двигателя l293d и arduino uno.Учебное пособие поможет вам понять, насколько легко вращать двигатель постоянного тока как по часовой, так и против часовой стрелки, используя l293d и arduino uno.
Микроконтроллеры не могут управлять двигателем постоянного тока самостоятельно
Все мы знаем, что микроконтроллеры сами по себе не могут управлять двигателями постоянного тока. Поскольку тока, который они выдают на свои выходные контакты, недостаточно для привода небольшого двигателя постоянного тока. Обычно контакты ввода / вывода микроконтроллера выводят токи (20 м / ампер -40 м / ампер).Контакты Arduino uno gpio могут выдавать 40 миллиампер постоянного тока, однако 40 мА недостаточно для привода двигателя постоянного тока.
Внешняя схема с микроконтроллером для привода двигателя постоянного тока
Двигателюпостоянного тока требуется от 100 до 250 милл ампер постоянного тока для вращения и перемещения шпинделя или вала. Таким образом, очевидно, что нам требуется внешний источник с микроконтроллером для управления двигателем постоянного тока. Лучшее решение — использовать транзисторы и МОП-транзисторы для управления двигателем постоянного тока.Чтобы контролировать направление вращения двигателя, мы должны использовать несколько транзисторов и МОП-транзисторов. Также мы должны ввести правильную логику в виде программного кода в Arduino, чтобы вращать двигатель в любом направлении.
Использование предварительно собранного драйвера двигателя постоянного тока
Самыми популярными драйверами / схемами двигателей постоянного тока среди разработчиков встраиваемых систем являются Н-мостовые схемы. H-мост представляет собой комбинацию 4 транзисторов или МОП-транзисторов, объединенных в фиксированную линейную схему. Логическая схема H-моста показана ниже.
Н-мостовая логическая схема
Поскольку создание h-мостовой схемы занимает много времени, а сама схема грязная и занимает много места, мы можем использовать драйвер двигателя l293d.L293d — это h-мостовая схема в небольшой микросхеме, которая проста в использовании и в обращении, она также занимает меньше места, чем создание стандартной h-мостовой схемы с линейными компонентами.Если вы новичок и не знаете о выводе l293d, его внутреннем устройстве и как его эффективно использовать? Просто воспользуйтесь приведенным ниже руководством, оно поможет вам понять код Arduino, написанный ниже.
Из приведенного выше руководства вы можете легко понять, как выполнить подключение двигателя с помощью выводов Arduino uno и драйвера двигателя l293d.Каждый шаг взаимодействия нагрузки с l293d хорошо объяснен в приведенном выше руководстве.
Управление двигателем постоянного тока Arduino, драйвер двигателя L293d — Двунаправленное управление двигателем — соединения
Я собираюсь использовать канал 1 драйвера двигателя l293d для управления и управления направлением вращения двигателя постоянного тока. Принципиальная схема проста. Заземлите Pin # 4 и 5 L293D. Подайте +5 В в качестве входа на контакт № 1 l293d. Подайте +12 В на вывод №8 разъема l293d.Arduino digital Pin # 7 и 8 используются для управления направлением вращения двигателя. Подключите цифровой вывод Arduino No 7 к контакту 7 драйвера двигателя l293d и контакту 8 к контакту 2 l293d. Теперь подключите двигатель к Pin # 3 и 6 L293d. Заземление Контакт # 4 и 5 канала 1 l293d. Arduino может питаться от персонального компьютера или USB-порта ноутбука. L293d питается от внешнего источника 12 В.
Драйвер и контроллер двигателя L293d с Arduino, управляющим направлением вращения двигателя постоянного тока
Примечание: Я использую контакты №3 и 6 в качестве выходных, потому что я использую только одну сторону микросхемы (L293).Если вы используете другую сторону, убедитесь, что ваши соединения правильные. Примечание. L293D может запускать два двигателя одновременно, вы также можете использовать его для запуска только одного двигателя. Как и я!
Драйвер двигателя
L293d с приводом двигателя постоянного тока arduino — Код проекта
Код проекта прост. Сначала я определил контакты № 7 и 8. Затем в функции настройки void определил оба контакта № 7 и 6 в качестве выходных контактов. Теперь они могут выводить только цифровой сигнал. В функции void loop я делаю все, что связано с управлением направлением.Сначала я даю задержку на 2 секунды, чтобы цепь стабилизировалась. Обратите внимание, что функция void loop в arduino такая же, как у , а (1) постоянно работает или повторяется.
Затем я установил Pin # 7 HIGH и Pin # 8 LOW , этот сигнал поступает на L293d Pin # 2 и 7 , что заставляет наш двигатель работать по часовой или против часовой стрелки в зависимости от вашей конфигурации . Двигатель остается в этом состоянии в течение 4 секунд, после чего состояние штифтов изменяется.
Теперь оба штифта находятся в НИЗКОМ положении, это означает, что ноль, который заставляет двигатель останавливаться и двигатель останавливается на 3 секунды, этот шаг очень важен, потому что теперь мы хотим изменить направление, и если мы изменим его без какой-либо задержки, то это может быть опасно для нашей схемы и водителя двигателя. когда двигатель вращается, он генерирует в нем обратную ЭДС (электродвижущую силу), а когда он останавливается, эта ЭДС передается обратно в цепь, что может быть вредным. Вот почему я заглушил мотор на 3 секунды.
Затем я снова вращаю двигатель, но на этот раз в противоположном направлении, установив Pin # 8 HIGH и 7 LOW .Теперь двигатель вращается в обратном направлении в течение 4 секунд. После этого снова задержка и мотор останавливается. После всех этих шагов функция цикла повторяется, и схема выполняет те же шаги с самого начала.
Еще проекты с микроконтроллерами и драйвером двигателя l293d. Проекты с открытым исходным кодом. Код и схемы бесплатны, можно использовать и изменять все в проектах.
Мотор — Привод двигателей постоянного тока — Экраны, совместимые с Arduino
- Привод двигателей постоянного тока от 4 В до 18 В
- Управляет 2 двигателями по 1 А каждый или 1 двигателем до 1 А.8A
- Защита от перегрузки, короткого замыкания и инверсии полярности
С помощью Motor Nanoshield вы можете контролировать скорость и направление вращения двигателей постоянного тока. Модуль работает с напряжением от 4 В до 18 В, и можно управлять двумя независимыми двигателями по 1 А каждый или одним двигателем с током до 1,8 А. Этот нанощит рекомендуется для проектов робототехники и любых других проектов, в которых необходимо управлять маломощными двигателями постоянного тока.
Кроме того, у вас есть несколько возможностей настроить способ питания двигателей и Arduino.Это упрощает электромонтаж, и проект становится более гибким, как вы увидите ниже.
Модуль также имеет защиту от перегрузки и ошибок при подключении, таких как инверсия полярности от источника питания и короткое замыкание на двигателях.
Робот, следящий за линией с помощью Motor Nanoshield (щелкните, чтобы увеличить)
! Использование моторного нанощита
Чтобы использовать Motor Nanoshield, вам просто нужно выбрать, хотите ли вы управлять 1 или 2 двигателями, а также способ подачи питания.Используйте следующие разделы в качестве руководства.
! Шаг 1. Выбор между 1 или 2 двигателями
Motor Nanoshield может управлять 2 двигателями постоянного тока с током до 1 А каждый или одним двигателем с током до 1,8 А (допустимый диапазон напряжения от 4 В до 18 В).
! Подключение 2 двигателей
Для одновременного управления 2 двигателями замкните на плате перемычки M2B, M2A, M1B и M1A (см. Рисунок ниже).
Двигатели подключаются к модулю через зеленую клеммную колодку.Клеммы M1 показывают соединение с двигателем 1 (управляется контактами 3 и 5 на Arduino), а клеммы M2 показывают соединение с двигателем 2 (управляемым контактами 6 и 9 на Arduino). Также имеется клемма GND, которую при необходимости можно использовать для подключения конденсаторов или любого другого фильтра.
На рисунке ниже показано, какие перемычки должны быть замкнуты и как выполняется подключение двигателя:
Подключение 2 двигателей одновременно к Motor Nanoshield
! Подключение 1 мотора
Чтобы управлять только 1 двигателем, замкните перемычки на плате с именами M1 / M2_B и M1 / M2_A (см. Рисунок ниже).После этого вы можете выбрать, будет ли двигатель управляться контактами 3 и 5 или контактами 6 и 9 на Arduino.
На следующем рисунке показаны оба соединения: слева двигатель управляется контактами 3 и 5; справа мотор управляется пинами 6 и 9.
Подключение 1 мотора к мотору Нанощиток
! Шаг 2: Выбор способа подачи питания
С Motor Nanoshield у вас есть различные возможности для настройки способа питания двигателей и Arduino.В следующих разделах показаны эти параметры.
! Питание двигателей и Arduino через вывод VIN
Эта установка позволяет питать оба двигателя и Arduino от напряжения, приложенного к VIN.
Чтобы использовать этот режим, закройте перемычку, которая расположена в верхней части платы, в позиции VIN (см. Рисунок ниже). Источник питания должен быть подключен к Arduino или базовой плате через входы внешнего источника питания или через клемму синего блока на Motor Nanoshield.Важно проверить индикацию полярности и .
На рисунке ниже показано, как включить систему через вывод VIN.
Питание двигателей через вывод VIN на Arduino
! Питание двигателей и Arduino через вывод VCC
Эта установка позволяет питать оба двигателя и Arduino от напряжения, приложенного к выводу VCC.
Чтобы использовать этот режим, закройте перемычку, которая находится в верхней части платы, в положении VCC (см. Рисунок ниже).Источник питания должен быть подключен через клемму синего блока на Motor Nanoshield. Обязательно проверьте полярность индикации и .
Однако необходимо убедиться, что источник питания (или аккумулятор) использует напряжение от 4 до 6 В. Напряжение менее 4 В может вызвать неисправность (но не повредить платы), а напряжение более 6 В может вызвать необратимое повреждение Arduino. Если ваш источник питания (или аккумулятор) обеспечивает более 6 В, используйте опцию «Запитать двигатели через вывод VIN на Arduino».
Питание через вывод VCC полезно, когда в вашем проекте используются батарейки типа AA и AAA. Например, вы можете последовательно использовать 4 щелочные батареи (1,5 В каждая) или 4 никель-металл-гидридные аккумуляторные батареи (1,2 В каждая).
На следующем рисунке показано, как включить систему через вывод VCC.
Питание двигателей через вывод VCC на Arduino
! Использование независимого внешнего источника питания для двигателей
Эта настройка позволяет использовать отдельный источник питания только для двигателей, то есть Arduino должен питаться от другого источника питания или через USB.Этот режим полезен, когда у вас есть двигатели, которые потребляют более высокое напряжение (например, от 12 до 18 В), что может вызвать перегрев регуляторов напряжения на Arduino.
Чтобы использовать независимый источник питания, снимите перемычку, расположенную в верхней части платы (см. Рисунок ниже). Электропитание двигателей должно быть подключено непосредственно к синей клемме блока Motor Nanoshield. Обязательно проверьте полярность индикации и .
На следующем рисунке показано, как подключить систему к независимому источнику питания.
Питание двигателей от независимого источника питания
! Шаг 3: Подключение к Arduino
! Использование базовой платы или базы Boarduino
Если у вас уже есть Arduino, самый простой способ использовать Motor Nanoshield — это использовать Base Board UNO или Base Board L UNO. Вам просто нужно смонтировать все платы, и система готова к использованию. Эта сборка может использоваться с Arduino UNO, Mega R3, Duemilanove и другими (свяжитесь с нами, если у вас есть сомнения по поводу совместимости с другими версиями).
Другой вариант — использовать Base Boarduino. Точно так же вам просто нужно установить Nanoshield в один из слотов, и система готова к использованию.
На следующем рисунке показана окончательная установка базовой платы и базы Boarduino.
Подключение с помощью базовой платы UNO или Base Boarduino (щелкните изображение, чтобы увеличить)
! Подключение Arduino с помощью перемычек
Также можно использовать модуль с прямыми подключениями, используя для подключения макетную плату и перемычки.Используйте следующие схемы, чтобы помочь вам подключить Motor Nanoshield к Arduino UNO или Arduino Mega.
Подключение с помощью Arduino UNO (щелкните изображение, чтобы увеличить)
Подключение с помощью Arduino Mega (щелкните изображение, чтобы увеличить)
! Шаг 4: Управление двигателями
Управление двигателем осуществляется, как показано в следующих таблицах. Можно использовать ШИМ для управления скоростью — например, используя аналоговую запись () .
! Двигатель 1
| Штифт D3 | Штифт D5 | Функция |
|---|---|---|
| 0 | 0 | ВЫКЛ |
| 0 | 1 | |
| 1 | 0 | |
| 1 | 1 | ТОРМОЗ |
Справочная таблица для управления двигателем 1
! Двигатель 2
| Штифт D6 | Штифт D9 | Функция |
|---|---|---|
| 0 | 0 | ВЫКЛ |
| 0 | 1 | |
| 1 | 0 | |
| 1 | 1 | ТОРМОЗ |
Справочная таблица для управления двигателем 2
.