


Задачник по физике — Белолипецкий С.Н. — DJVU, страница 41
Рассеяние магнитного потока в ярме трансформатора и потери энергии в его первичной обмотке пренебрежимо малы. 4.1808. Сила тока холостого хода в первичной обмотке понижающего трансформатора, питаемой от сети переменного тока частоты и = 50 Гц и напряжения 111 = 220 В, равна 11 = =- 0,20 А. Активное сопротивление первичной обмотки Лл = 100 Ом. Определите индуктивность Е первичной обмотки и напряжение Гг на зажимах вторичной обмотки, если коэффициент трансформации 1- = 10. 4.181 .
На железный сердечник намотаны две катушки (см. рисунок). Магнллтный поток, создаваемый каждой катушкой, не вьлходит из сердечника и делится поровну в разветвлениях. Прлл включенилл катушки 1 в цепь переменного тока напряжения Г11 = 40 В напряжение на катушке 3 равно Г12 = 10 В. Какое напряжение Ул возникнет на разомкнутых зажимах катуплки 1, если на катушку 2 подать переменный ток с напряжением с12 —— = 10 В? Потери энергии пренебрежимо малы.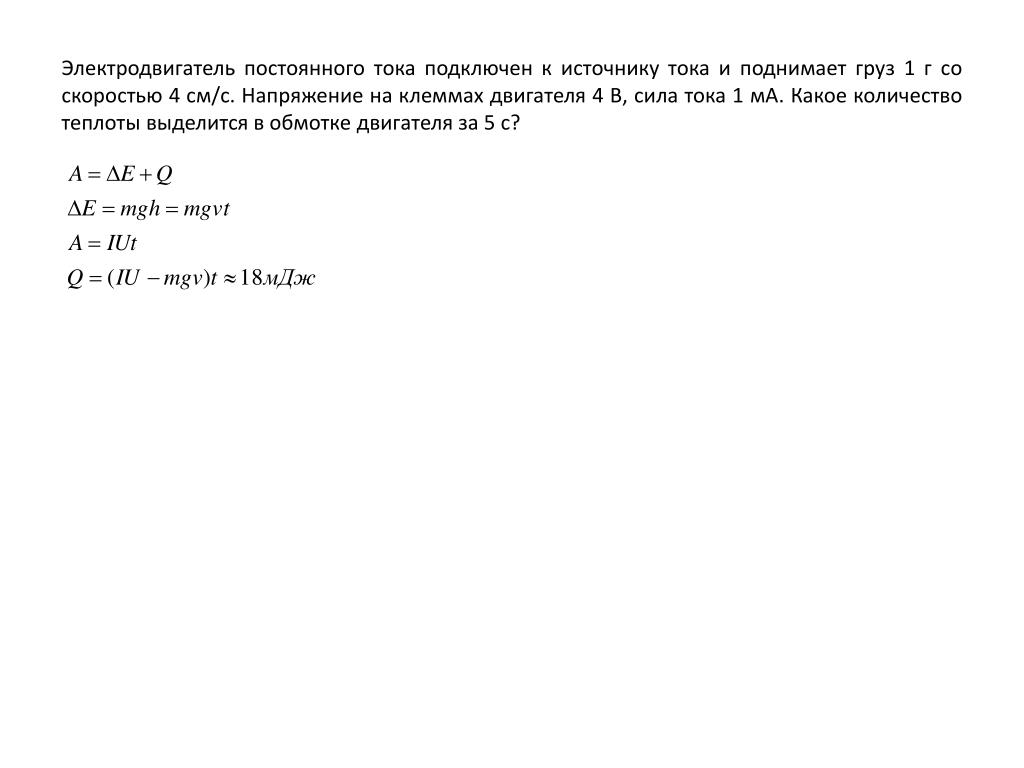 К задача 4.181 К задача 4.182 4.1828. Первичная обмотка трансформатора содержит Х витков, вторичная один виток.
К задача 4.181 К задача 4.182 4.1828. Первичная обмотка трансформатора содержит Х витков, вторичная один виток.
Трансформатор подключен к источнику переменного тока с ЭДС Е. К замкнутому витку вторичной обмотки подкллкплен гальванометр с внутренним сопротивлением т так, что точки подключения гальванометра делят виток на у ластки с сопротивлениями Лл и Л2 (см, рисунок). Определите силу тока 1 через гальваноълетр. Потери энергии в 202 коливлния и волны ГЛ. 4 первичной обмотке и рассеяние магнитного потока в серде пшке пренебрежимо малы. 4.1834. Два одинаковых идеальных трансформатора с коэффициентами трансформации к = 1/3 соединены последовательно разными обмотками (см. рисунок) и подклю юны к источнику переменного тока напряжения У = 100 В.
Определите напряжение Г4ап возникающее тлежду клеммами А и В. Длины и сечения катушек одинаковы. К задаче 4483 4.1844. На тороидальньш сердечник из феррита с магнитной проницаемостыо р, = 2000 намотаны две катушки: первичная и вторичная, содержащие соответственно Х1 = 2000 и № = = 4000 витков. Когда на первичнук> катушку подается напряжение бе1 =- 100 В, напряжение па разомкнутой втори шой обмотке составляет Г~ = 199 В. Какое напряжение Г~ возникает на разомкнутой вторичной катушке, если воспользоватьсж серде еником таких же размеров, но изготовленным из феррита с р’ = 20? Рассеяние магнитного потока и потери энергии в сердечнике пренебрежимо малы.
Когда на первичнук> катушку подается напряжение бе1 =- 100 В, напряжение па разомкнутой втори шой обмотке составляет Г~ = 199 В. Какое напряжение Г~ возникает на разомкнутой вторичной катушке, если воспользоватьсж серде еником таких же размеров, но изготовленным из феррита с р’ = 20? Рассеяние магнитного потока и потери энергии в сердечнике пренебрежимо малы.
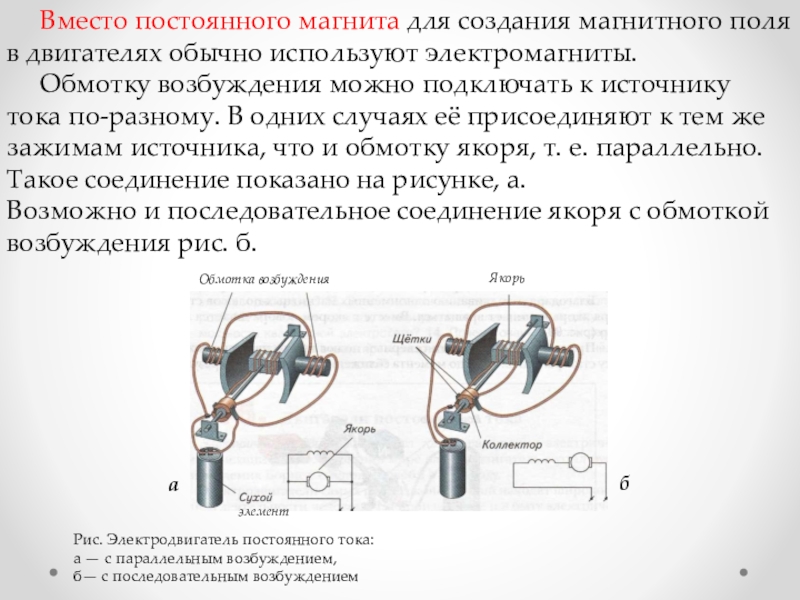
4.9. Электрические машины постоянного тока Электрическими машинами постоянного тока называют электродвигатели (электромоторы) и электрогенераторы (динамо-машины) постоянного тока. Элекшродвигатель преобразует энергию электромагнитного поля в механическую. Основными элементами электродвигателя являк>тся индуктор — источник электромагнитного поля и якорь (рогаор) враща|ощаяся тасть электродвигателя, представляюпия собой совокупность рамок с током, которые называют обмотка ии. Вели индуктор представляет собои постоянный 4.9 ЭЛНКТРИЧКСКИК МЛП!ИНЫ ПОСТОЯННОГО ‘!’ОКЛ 203 ътаГнит или элттктрохтагттттт, обмотка которого питается не:зависимо от обмотки якоря„то такой электродвигатель называют элекптродвигателем постоянного тока с независимым воэбуэтс- дениелв Закон Ома для цепи якоря электродвигателя с независимым возбуждением имеет вид ?? — б! = 1Л, где ?? напряжение источника тока.
ст — ЭДС индукции, воз- ннкактп!ая в обмотке якоря при его вращении в магнитном поле, индуктора, 1 сила тока в цепи, Л обп!ее сопротивление об- мотки якоря и подводятпих проводов. Закон схт еранения энергии для цепи якоря электродвигателя ??1 = 1~Л+ Р, где Р = ст? полезная мощность. Электрогене?!автор преобразует механическую энергикт в электромагнитнуто. Его устройство аналогично устройству элек- тродвигателя.
Закон Ома дгтя генератора Е! = 1Л., где ст —.- ЭДС инлукции, возникающая в обмотке якоря! 1 . — ток в обмотке якоря; Л сопротивление цепи якоря. Закон сохранения энергии для идеального электродвигателя (потерт! энергии на трение пренебрежимо э!альт) имеет вид Рв=б,1, где Р,„механическая мощность, расходуемая на вратцение яко- !тя. Закон обраптимости элекгпри ссскигс ма!итти. Если одна и та же электрическая машина работает в первом случае как элек- трогенератор, во втором как электродвигатель. то бт! т’11 ст2 вт2 угловая скорость вращения якоря электрической мапти- где ы ны.
4.185 . Электродвигатель с независимым возбуждением 2 подключен к источнику постоянного тока напряжения ??. Сопротивление обмотки якоря и подводящих проводов равно Л. Изобразите графики зависимостей ЭДС индукции б, возникающей в обмотке якоря, силы тока 1 в т!спи и полезной мощности Р от угловой скорости ы враптенвя якоря. Определите максимальную полезную мощность Р„„„,. Какому зна»тению силы тока 19 в цепи соответствует эта мощность? 204 КОлевания и ВОлны ГН. 4 4.186Я. Электродвигатель питается от батареи с ЭДС Е = = 12 В.
Какую мощность Р развивает двигатель при протекании по его обмотке тока 1 = 2, 0 А, если при полной остановке якоря по цепи течет ток 1в = 3, 0 А? 4.187 . Электродвигатель присоединили к источнику тока г напряжения 5| = 500 В. При силе тока в цепи 1| = 10 А он развивает мощность Р| = 4,0 кВт. Определите мо|цность Рж развиваемую двигателем, если вследствие изменения нагрузки сила тока в цепи стала равной ?з = 20 А. 4.188 . В момент включения эл|ктродвигателя в сеть по- 2 стоянного тока сила тока в цепи составляет 1в = 15 А, а в процессе работы электродвигателя в установившемся режиме она снижается до значения 1 = 9, 0 А.
Определите КПД и электродвигателя. 4.189 . Электродвигатель вклю |ен в сеть постоянного тока. 3 Прп частоте арап|ения якоря |’| = 1000 об?мин ток в цепи якоря равен 1| = 10 А, а при |астоте |’з = 900 об,’мин он равен ?э = = 15 А. Определите частоту вра|пения 1з двигателя на холостом ходу (без нагрузки). 4.190~. Вал электродвигателя постоянного тока, включенного вхолостую в сеть с напряжением Г = 24 В, вращается с частотой (| = 10 об,’с при полном сопротивлении цепи Л = 20 Ом и силе тока в цепи?| — — О, 20 А. Какой ток Р> течет через обмотку якоря электродвигателя, когда с его помощью подниълают груз массы т, = 1, 0 кг на легком тросике, который наматывается на шкив диаметра В = 20 мм? С какой частотой ~з вращается при этом вал электродвигателя? Момент гил трения в оси не зависит от скорости вращения вала.
4.191~. Вал электродвигателя постоянного тока, включенного без нагрузки в сеть постоянного тока. вращается с частотой ~| = 1000 об/мин, с нагрузкой . с частотой ~з = 700 об,’мин. С какой частотой| (‘з будет врагцаться вал двигателя, если момент си.л, создаваемьш нагрузкой, увеличить на 9 = 20 % ? Трение в оси двигателя пренебрежимо мало. 4.192~. Лебедка приводится в движение электродвигателем с независимым возбуждением. Электродвигатель питается от батареи с ЭДС Е = 300 В. Без груза конец троса .|ебедкп поднимается со скоростью и| = 4, 0 м,’с, с грузом массы т = 10 кг со скоРостью пз = 1, 0 и,,’с. Опйеделите, с ~ак~й ско1|остыо па должен двигаться груз и какова должна быть его масса гпш чтобы лебедка развивала максимальную мощность. Массой троса и трением в оси двигателя пренебречь.
С какой частотой| (‘з будет врагцаться вал двигателя, если момент си.л, создаваемьш нагрузкой, увеличить на 9 = 20 % ? Трение в оси двигателя пренебрежимо мало. 4.192~. Лебедка приводится в движение электродвигателем с независимым возбуждением. Электродвигатель питается от батареи с ЭДС Е = 300 В. Без груза конец троса .|ебедкп поднимается со скоростью и| = 4, 0 м,’с, с грузом массы т = 10 кг со скоРостью пз = 1, 0 и,,’с. Опйеделите, с ~ак~й ско1|остыо па должен двигаться груз и какова должна быть его масса гпш чтобы лебедка развивала максимальную мощность. Массой троса и трением в оси двигателя пренебречь.
4.1934. Сопротивление обмотки якоря электродвигателя равно йц а обмотки индуктора йв. Вели обмотки якоря и индуктора соединены последовательно и подклк|чены к одному иг- 4.9 элнктгичнскик мл!пинь1 ИОстОЯннОГО ‘!’Окл 205 точнику тока, то такой электродвигатель называк>т двигателем с последовательным возбуждением (серигсным двигателем). Гели же обмотки соединены параллельно, то электродвигатель называют двигателем с параллельным возбуждением (шунтовым двшителем). В каком случае максимальная полезная мощность Р болыпе? Каковы коэффициенты полезного действия 0, соответствукицие максимальным значениям мощности в обоих случаях’? Напряжение питания двигателя равно 1Е. 4.194 .
В каком случае максимальная полезная мощность Р болыпе? Каковы коэффициенты полезного действия 0, соответствукицие максимальным значениям мощности в обоих случаях’? Напряжение питания двигателя равно 1Е. 4.194 .
Вал электродвигателя постоянного тока, на клеммы которого подано напряжение 1Е! = 120 В, вращается с частотой Е! = 15 об,’с при силе тока в цепи якоря Е> =- 1,0 А. Какую ЭДС б, разовьет та же электрическая мшпина, работая в качестве генератора при частоте вра>цения вала ~з = 30 !>б,’с? Каким будет напряжение Гз на сопротивлении нагрузки Л = 65 Ом, подключенном к клеммам этого генератора’? Какук> мощность Р развивает при этом генератор? Сопротивление обмотки якоря г =- 5,0 Ом. 4.1 95а.
Угловая скорость вращения якоря генератора с постоянным магнитом увеличилась на Ч„ = 10 А>. На сколько >! процентов увеличится при этом полезная мощность генератора? 4.196а. Какую ЭДС 5 развивает генератор постоянного тока, если при сопротивлении цепи Л! = 300 Ом на вращение ротора затра >ивастся мощность Р> = 50 Вт, а потери на трение составляют о = 4% от затраченной мо>цности? Какую мощность Рз для поддержания той же частоты вращения якоря необходимо затра !ивать при сопротивлении цепи Лз = 60 Ом? 4.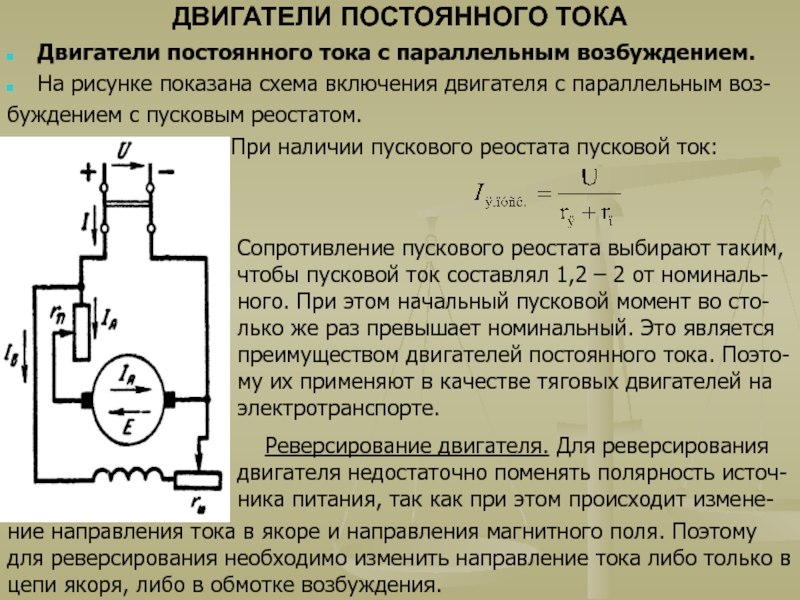 1974. Груз массы т подвешен на невесомой нити, намотанной на ось якоря генератора с независимым возбуждением, замкнутои на резистор сопротивления Л.
1974. Груз массы т подвешен на невесомой нити, намотанной на ось якоря генератора с независимым возбуждением, замкнутои на резистор сопротивления Л.
Нить смать>вается с оси так, что груз опускается с постоянной скоростью в>. С какой скоростью вз будет подниматься вверх тот же груз, если генератор включить как электродвигатель в цепь постоянного тока с напряжением 1Е и тем же сопротивлением цепи Л? Сопротивлением обмотки якоря генератора пренебречь. 4.1984. Электродвигатель постоянного тока с независимь!м возбуждением (с постоянным магнитом) поднимает груз со скоростью в> при помощи невесомой нити, наматывающейся на ось двигателя. В отсутствие груза невесомая нить поднимается со скоростью го.
С какой скоростью оз будет опускаться тот же груз, если обмотка якоря будет замкнута накоротко? Трением в подшипниках пренебречь. 4.1994. Имеется генератор с независиъ>ым возбуждением, на якоре которого име>отея две одинаковые обмотки с сопротивлением > каждая; каждая из обмоток соединена с одним из двух одинаковых коллекторов, Одну из обмоток подключили к 206 кОленания и ВОлны ГЛ. 4 исто >нику с напряжением 11; другу>о замкнули на резистор сопротивления Л, Как зависят ЭДС индукции в обмотках и сила тока в каждой из обмоток от сопротивления Л? 4.10. Колебательиь>й контур Частным случаем электрической цепи, в которой могут происходить свободные электрические колебания, является колебагаальный коня>ур (см.
4 исто >нику с напряжением 11; другу>о замкнули на резистор сопротивления Л, Как зависят ЭДС индукции в обмотках и сила тока в каждой из обмоток от сопротивления Л? 4.10. Колебательиь>й контур Частным случаем электрической цепи, в которой могут происходить свободные электрические колебания, является колебагаальный коня>ур (см.
Работа и схемы электродвигателей постоянного тока
Моторы, работающие на постоянном токе редко встречаются в домашнем хозяйстве. Но они всегда стоят во всех детских игрушках, работающих от батареек, которые ходят, бегают, ездят, летают и т. п. Двигатели постоянного тока (ДПТ) устанавливаются в автомобилях: в вентиляторах и различных приводах. Они почти всегда используются на электротранспорте и реже в производстве.
Преимущества ДПТ по сравнению с асинхронными моторами:
- Хорошо поддаются регулировке.
- Отличные пусковые свойства.
- Частоты вращения могут быть более 3000 об/мин.
Недостатки ДПТ:
- Низкая надежность.

- Сложность изготовления.
- Высокая стоимость.
- Большие затраты на обслуживание и ремонт.
Далее Я постараюсь кратко и доступно в одной статье изложить схемы, принципы работы, регулировки и реверса двигателей постоянного тока.
Принцип действия электродвигателя постоянного тока
Устройство двигателя аналогично синхронным двигателям переменного тока. Повторяться не буду, если не знаете, тогда смотрите в этой нашей статье.
Любой современный электромотор работает на основе закона магнитной индукции Фарадея и «Правила левой руки». Если к нижней части обмотки якоря подключить электрический ток в одном направлении, а к верхней- в обратном- он начнет вращаться. Согласно правилу левой руки, проводники, уложенные в пазах якоря, будут выталкиваться магнитным полем обмоток корпуса ДПТ или статора.
Нижняя часть будет выталкиваться вправо, а верхняя – влево, поэтому якорь начнет вращаться до момента пока части якоря не поменяются местами.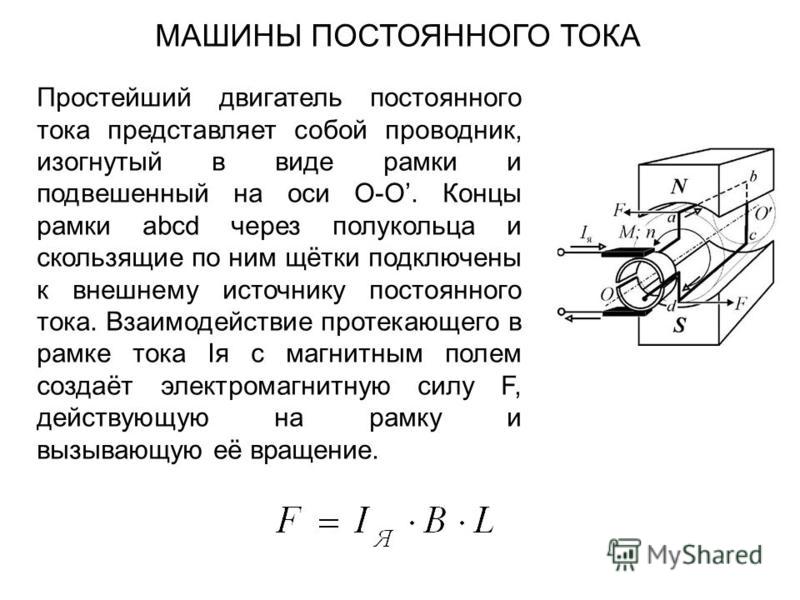
Принципиальные схемы электродвигателя постоянного тока
Если двигатели переменного тока довольно просто подключаются, то с ДПТ все сложнее. Вам необходимо знать марку мотора, и затем в интернете узнавайте про его схему включения.
Чаще всего у средних и мощных моторов постоянного тока есть в клеммной коробке отдельные выводы от якоря и от обмотки возбуждения (ОВ). Как правило, на якорь подаётся полное напряжение электропитания, а на обмотку возбуждения -регулируемый ток реостатом или переменным напряжением. От величины тока ОВ и будут зависеть обороты ДПТ. Чем он выше, тем быстрее скорость вращения.
В зависимости от того как подключен якорь и ОВ, электродвигатели бывают с независимым возбуждением от отдельного источника тока и с самовозбуждением, которое может быть параллельным, последовательным и смешанным.
На производстве применяются двигатели с независимым возбуждением ОВ, которая подключается к отдельному от якоря источнику питания. Между обмотками возбуждения и якоря нет электрической связи.
Схема подключения с параллельным возбуждением по своей сущности аналогична схеме с независимым возбуждением ОВ. С той лишь разницей, что отпадает необходимость в использовании отдельного источника питания. Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
Моторы с последовательным возбуждением применяются, когда необходим большой пусковой ток, мягкая характеристика. Они применяются а трамваях, троллейбусах и электровозах. По этой схеме обмотки возбуждения и якоря подключаются между собой последовательно. При подаче напряжения токи в обоих обмотках будут одинаковы. Главный недостаток заключается в том, что при уменьшении нагрузки на вал меньше 25% от номинала, происходит резкое увеличение частоты вращения, достигающее опасных для ДПТ значений.
Иногда применяются ДПТ со смешанным возбуждением, при котором одна обмотка ОВ соединяется последовательно якорной цепи, а другая параллельно. В жизни редко встречается.
Реверсирование двигателей постоянного тока
Что бы изменить направление вращение
Реверсирование ДПТ с параллельным или смешанным возбуждением лучше производить изменением направления электрического тока в обмотке якоря. При разрыве обмотки возбуждения, ЭДС достигает опасных величин и возможен пробой изоляции проводов.
Регулирование оборотов двигателей постоянного тока
ДПТ с последовательным возбуждением
ДПТ с параллельным возбуждением так же можно регулировать частоту оборотов вниз при помощи сопротивления в цепи якоря, но не более 50 процентов от номинала. Опять же будет нагрев сопротивления из-за потерь электрической энергии в нем.
Увеличить же обороты максимум в 4 раза позволяет реостат в цепи ОВ. Самый простой и распространенный метод регулировки частоты вращения.
На практике в современных электромоторах данные методы регулировки из-за своих недостатков и ограниченности диапазона регулирования редко применяются. Используются различные электронные схемы управления.
Система и способ управления интеллектуальным унитазом
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[001] Данная заявка является обычной заявкой, заявляющей приоритет международной заявки PCT/CN2015/094446, дата международной подачи — 12 ноября 2015 г., все содержимое которой посредством ссылки включается в данное описание в прямой форме.
ОПОВЕЩЕНИЕ ОБ АВТОРСКОМ ПРАВЕ
[002] Часть раскрытия данного патентного документа содержит материал, охраняемый нормами авторского права. Владелец авторских прав не возражает против какого-либо воспроизведения кем-либо данного патентного раскрытия так, как оно встречается в патентных файлах и записях Ведомства по патентам и товарным знакам США, но в других обстоятельствах оставляет за собой все какие бы то ни было авторские права.
ПРЕДПОСЫЛКИ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[003] Настоящее изобретение относится к интеллектуальному унитазу и, в частности, к системе и способу управления интеллектуальным унитазом.
ОПИСАНИЕ ИЗВЕСТНОГО УРОВНЯ ТЕХНИКИ
[004] Интеллектуальный унитаз создали в США для использования и ухода за пожилыми людьми, при этом первоначальный интеллектуальный унитаз был рассчитан на обеспечение функции гигиенической обработки теплой водой. После этого интеллектуальный унитаз был усовершенствован корейскими и японскими санитарно-техническими компаниями, и в этих странах была представлена производственная технология, предусматривающая многочисленные функции, в том числе функцию сиденья с подогревом, функцию гигиенической обработки теплой водой, функцию сушки теплым воздухом и функцию стерилизации. Существующий интеллектуальный унитаз обычно предусматривает функцию сиденья с подогревом, функцию гигиенической обработки теплой водой после пользования унитазом и функцию сушки теплым воздухом.
[005] Крышку сиденья и сиденье унитаза у интеллектуальных унитазов в общественных уборных (таких как гостиничные номера или общественные туалеты) пользователь открывает и закрывает вручную, поэтому нельзя игнорировать потенциальные гигиенические проблемы. Поэтому для современного интеллектуального унитаза нужно рассмотреть бесконтактную автоматическую функцию откидывания сиденья унитаза и крышки сиденья. В дополнение, к интеллектуальному унитазу требуется приспособить отличающиеся требования для мужчин и женщин.
[006] Ранее для обнаружения объекта, приближающегося к интеллектуальному унитазу, с целью выполнения функции автоматического откидывания крышки был встроен инфракрасный датчик. Однако эксплуатационная долговечность инфракрасного датчика является краткой, и не может быть решена проблема интерференции инфракрасного датчика. В дополнение, для установки инфракрасного датчика в верхней поверхности крышки сиденья формируют отверстие, и, таким образом, через это отверстие может просачиваться вода, повреждающая инфракрасный датчик.
Однако эксплуатационная долговечность инфракрасного датчика является краткой, и не может быть решена проблема интерференции инфракрасного датчика. В дополнение, для установки инфракрасного датчика в верхней поверхности крышки сиденья формируют отверстие, и, таким образом, через это отверстие может просачиваться вода, повреждающая инфракрасный датчик.
[007] В патенте Китая №CN200920199983.0 раскрыт интеллектуальный унитаз, содержащий сиденье унитаза и крышку сиденья с приспособлением для автоматического открывания и закрывания. Это сиденье унитаза и крышка сиденья шарнирно соединены друг с другом на унитазе посредством стержня сиденья и стержня крышки, при этом стержень сиденья и стержень крышки расположены на одной общей стержневой оси. В дополнение, этот интеллектуальный унитаз также содержит два отдельных двигателя, предусмотренные по отдельности соответственно на сиденье унитаза и на крышке сиденья. В частности, двигатель сиденья функционально связан со стержнем сиденья, тогда как двигатель крышки функционально связан со стержнем крышки сиденья. Каждый двигатель содержит пусковую схему и схему управления. Стержень сиденья и стержень крышки связаны друг с другом посредством зубчатой передачи. Стержень сиденья содержит ось стержня, втулку стержня и пружину, присоединенную между осью стержня и втулкой стержня, при этом с одним из концов оси стержня связан электромагнит. Посредством принципа электромагнитного механизма и принципа зубчатого механизма сиденье унитаза может приводиться в действие для открывания отдельно посредством запуска двигателя сиденья. В то же время крышка сиденья сконфигурирована для автоматического открывания и закрывания посредством датчика. Иными словами, сиденье унитаза нельзя привести в действие для поднятия по отдельности или вместе с крышкой сиденья. Поэтому пользователю по-прежнему требуется прикосновение и удерживание сиденья унитаза для того, чтобы поднять сиденье унитаза, поэтому вышеупомянутый интеллектуальный унитаз является неудобным и по-прежнему обладает потенциальными проблемами с загрязнителями.
Каждый двигатель содержит пусковую схему и схему управления. Стержень сиденья и стержень крышки связаны друг с другом посредством зубчатой передачи. Стержень сиденья содержит ось стержня, втулку стержня и пружину, присоединенную между осью стержня и втулкой стержня, при этом с одним из концов оси стержня связан электромагнит. Посредством принципа электромагнитного механизма и принципа зубчатого механизма сиденье унитаза может приводиться в действие для открывания отдельно посредством запуска двигателя сиденья. В то же время крышка сиденья сконфигурирована для автоматического открывания и закрывания посредством датчика. Иными словами, сиденье унитаза нельзя привести в действие для поднятия по отдельности или вместе с крышкой сиденья. Поэтому пользователю по-прежнему требуется прикосновение и удерживание сиденья унитаза для того, чтобы поднять сиденье унитаза, поэтому вышеупомянутый интеллектуальный унитаз является неудобным и по-прежнему обладает потенциальными проблемами с загрязнителями.
КРАТКОЕ ОПИСАНИЕ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[008] Настоящее изобретение является преимущественным в том, что оно предусматривает систему и способ управления интеллектуальным унитазом, представляющим собой высокоинтеллектуальное устройство, являющееся простым в использовании и предотвращающее какое-либо загрязнение рук пользователя посредством прикосновения к интеллектуальному унитазу.
[009] Другим преимуществом изобретения является создание системы и способа управления интеллектуальным унитазом, в котором интеллектуальный унитаз содержит приводное устройство сиденья унитаза, приводное устройство крышки сиденья и схему управления, при этом схема управления содержит детектор пользователя, предназначенный для обнаружения присутствия пользователя, и микроконтроллер. Для сиденья унитаза и крышки сиденья может быть установлен мужской режим работы и женский режим работы. В мужском режиме работы в ответ на присутствие пользователя, обнаруживаемое детектором пользователя, микроконтроллер одновременно поднимает сиденье унитаза и крышку сиденья посредством приводного устройства сиденья унитаза и приводного устройства крышки сиденья. В женском режиме работы в ответ на присутствие пользователя, обнаруживаемое детектором пользователя, микроконтроллер поднимает только крышку сиденья посредством приводного устройства крышки сиденья.
В женском режиме работы в ответ на присутствие пользователя, обнаруживаемое детектором пользователя, микроконтроллер поднимает только крышку сиденья посредством приводного устройства крышки сиденья.
[0010] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, если детектор пользователя обнаруживает отсутствие движения или отсутствие пользователя, микроконтроллер приводит в действие приводное устройство сиденья унитаза и приводное устройство крышки сиденья для наложения и связывания сиденья унитаза и крышки сиденья друг с другом в опущенном закрытом положении.
[0011] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, детектор пользователя представляет собой микроволновой детектор, и сиденье унитаза и крышку сиденья поднимает микроконтроллер. Схема управления содержит сенсорный переключатель, оставляющий руки свободными, при этом выходной конец этого сенсорного переключателя, оставляющего руки свободными, подключен к микроконтроллеру. В мужском режиме работы сенсорный переключатель, оставляющий руки свободными, представляет собой ножной сенсорный переключатель, которого пользователь касается ногой, и, таким образом, микроконтроллер опускает сиденье унитаза посредством приводного устройства сиденья унитаза.
В мужском режиме работы сенсорный переключатель, оставляющий руки свободными, представляет собой ножной сенсорный переключатель, которого пользователь касается ногой, и, таким образом, микроконтроллер опускает сиденье унитаза посредством приводного устройства сиденья унитаза.
[0012] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, детектор пользователя содержит два микроволновых детектора, при этом два конца этих двух микроволновых детекторов подключены к микроконтроллеру. Два микроволновых детектора расположены симметрично соответственно справа и слева от верхней крышки для обнаружения и анализа жеста пользователя (рука пользователя движется слева направо или справа налево) с целью отправки выходных сигналов из микроволновых детекторов в определенной последовательности с тем, чтобы определять, какой из режимов работы, мужской или женский, установить и привести в действие. Мужской режим работы и женский режим работы определяют выходные сигналы, генерируемые микроволновыми детекторами.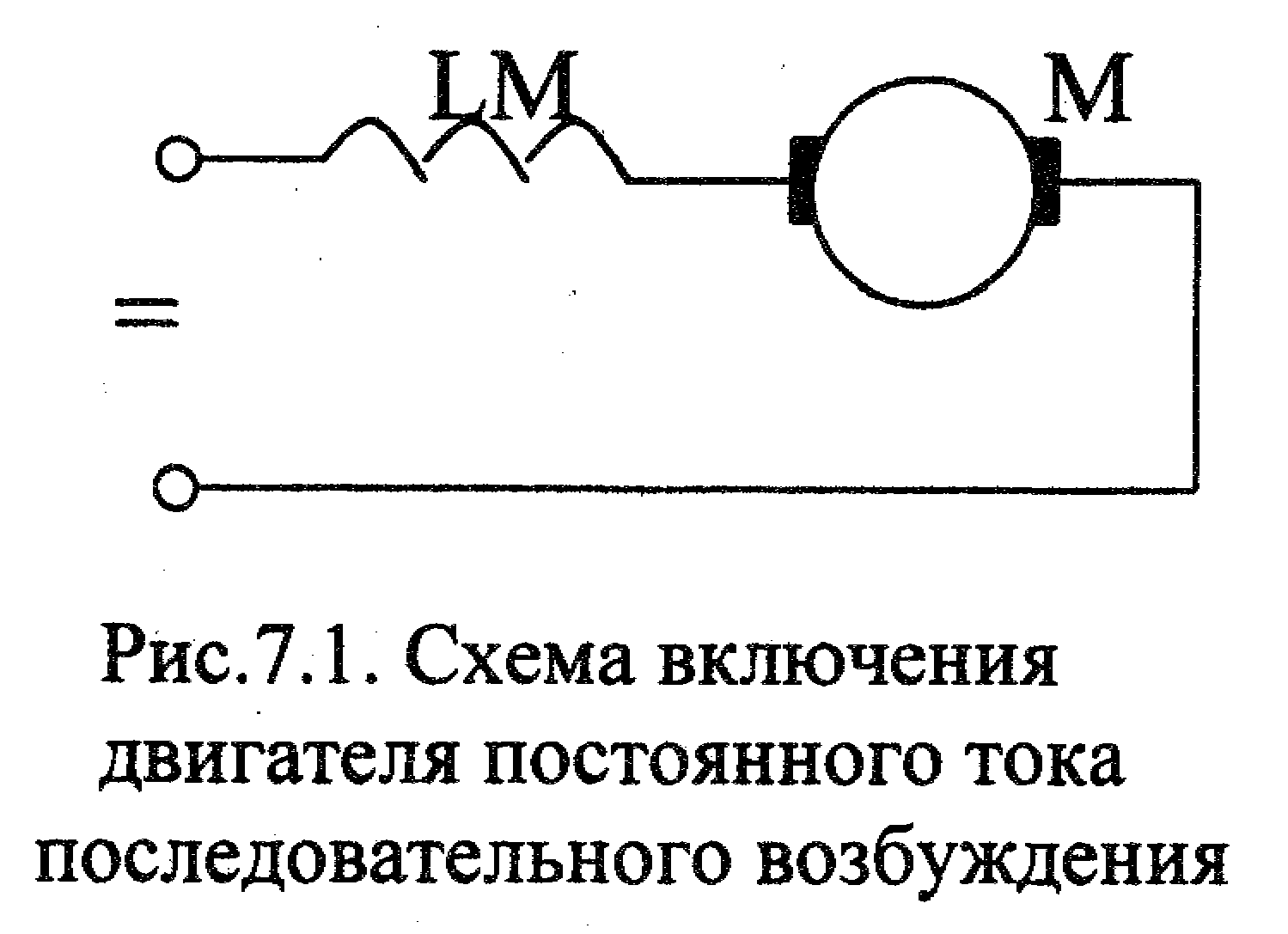
[0013] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, схема управления содержит сенсорный переключатель, оставляющий руки свободными, и выходные концы этого сенсорного переключателя, оставляющего руки свободными, подключены к микроконтроллеру. Если микроволновой детектор не обнаруживает какого-либо жеста пользователя, можно привести в действие сенсорный переключатель, оставляющий руки свободными, и микроконтроллер может посредством приведения в действие сенсорного переключателя, оставляющего руки свободными, поднимать сиденье унитаза и крышку сиденья посредством приводного устройства крышки сиденья и приводного устройства сиденья унитаза.
[0014] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, каждое приводное устройство, приводное устройство сиденья унитаза и приводное устройство крышки сиденья, содержит электродвигатель постоянного тока, схему управления двигателем и потенциометр, при этом два подвижных контакта потенциометра приводятся в движение электродвигателем постоянного тока. Два закрепленных конца сопротивления потенциометра подключены соответственно к положительному электроду источника питания и к заземлению. Подвижные контакты потенциометра воплощены как измерительные концы, соединенные с микроконтроллером с целью обнаружения угла как сиденья унитаза, так и крышки сиденья. Частоту вращения электродвигателя постоянного тока определяют посредством PMW. Когда сиденье унитаза и крышка сиденья поднимаются или опускаются, углы сиденья унитаза и крышки сиденья часто замеряются микроконтроллером посредством потенциометра, и, таким образом, можно вычислить угловые скорости сиденья унитаза и крышки сиденья. Когда угловые скорости сиденья унитаза и крышки сиденья превышают предопределенные значения, необходимо уменьшить коэффициенты заполнения электродвигателей постоянного тока.
Два закрепленных конца сопротивления потенциометра подключены соответственно к положительному электроду источника питания и к заземлению. Подвижные контакты потенциометра воплощены как измерительные концы, соединенные с микроконтроллером с целью обнаружения угла как сиденья унитаза, так и крышки сиденья. Частоту вращения электродвигателя постоянного тока определяют посредством PMW. Когда сиденье унитаза и крышка сиденья поднимаются или опускаются, углы сиденья унитаза и крышки сиденья часто замеряются микроконтроллером посредством потенциометра, и, таким образом, можно вычислить угловые скорости сиденья унитаза и крышки сиденья. Когда угловые скорости сиденья унитаза и крышки сиденья превышают предопределенные значения, необходимо уменьшить коэффициенты заполнения электродвигателей постоянного тока.
[0015] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, процесс опускания как сиденья унитаза, так и крышки сиденья разделен на множество угловых сегментов, при этом первоначальная угловая скорость как сиденья унитаза, так и крышки сиденья имеет наивысшее значение, когда сиденье унитаза и крышка сиденья начинают опускаться. Конечная угловая скорость как сиденья унитаза, так и крышки сиденья имеет самое низкое значение, когда процесс опускания и сиденья унитаза, и крышки сиденья завершается. Процесс поднятия как сиденья унитаза, так и крышки сиденья разделен на множество угловых сегментов. Начальная угловая скорость как сиденья унитаза, так и крышки сиденья имеет наивысшие значения, когда сиденье унитаза и крышка сиденья начинают подниматься. Конечная угловая скорость как сиденья унитаза, так и крышки сиденья имеет самые низкие значения, когда процесс поднятия как сиденья унитаза, так и крышки сиденья завершен.
Конечная угловая скорость как сиденья унитаза, так и крышки сиденья имеет самое низкое значение, когда процесс опускания и сиденья унитаза, и крышки сиденья завершается. Процесс поднятия как сиденья унитаза, так и крышки сиденья разделен на множество угловых сегментов. Начальная угловая скорость как сиденья унитаза, так и крышки сиденья имеет наивысшие значения, когда сиденье унитаза и крышка сиденья начинают подниматься. Конечная угловая скорость как сиденья унитаза, так и крышки сиденья имеет самые низкие значения, когда процесс поднятия как сиденья унитаза, так и крышки сиденья завершен.
[0016] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, как сиденье унитаза, так и крышка сиденья расположены под углом 0°, когда сиденье унитаза и крышка сиденья находятся в наложенном и связанном друг с другом состоянии, а угол как сиденья унитаза, так и крышки сиденья установлен на 120°, когда сиденье унитаза и крышка сиденья подняты. В процессе опускания как сиденья унитаза, так и крышки сиденья угол сиденья унитаза и крышки сиденья устанавливают между 120° и 75°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе опускания установлена при 70°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 75° и 40°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе опускания установлена при 35°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 40° и 0°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе опускания установлена при 25°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 0° и 40°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе поднятия установлена при 70°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 40° и 80°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе поднятия установлена при 35°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 80° и 120°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе поднятия установлена при 25°/с.
Угол сиденья унитаза и крышки сиденья устанавливают между 75° и 40°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе опускания установлена при 35°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 40° и 0°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе опускания установлена при 25°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 0° и 40°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе поднятия установлена при 70°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 40° и 80°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе поднятия установлена при 35°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 80° и 120°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе поднятия установлена при 25°/с.
[0017] В соответствии с вышеупомянутым предпочтительным вариантом осуществления настоящего изобретения, и приводное устройство сиденья унитаза, и приводное устройство крышки сиденья содержат электродвигатель постоянного тока M1, схему управления двигателем и схему опускания при отключенном питании, при этом выходной конец схемы управления двигателем подключен к выходному концу электродвигателя постоянного тока, а управляющий конец схемы управления двигателем подключен к первому выходному концу управляющего сигнала микроконтроллера (MCU). Схема опускания при отключенном питании содержит токоограничивающий резистор, электронный переключатель и реле, при этом электронный переключатель и контрольная катушка реле подключены последовательно, один конец контрольной катушки подключен к источнику питания, а другой конец контрольной катушки подключен к заземлению. Управляющий конец электронного переключателя подключен к выходному концу второго управляющего сигнала микроконтроллера; обмотка электродвигателя постоянного тока, токоограничивающий резистор и замыкающие контакты реле соединены друг с другом, образуя последовательную схему.
Схема опускания при отключенном питании содержит токоограничивающий резистор, электронный переключатель и реле, при этом электронный переключатель и контрольная катушка реле подключены последовательно, один конец контрольной катушки подключен к источнику питания, а другой конец контрольной катушки подключен к заземлению. Управляющий конец электронного переключателя подключен к выходному концу второго управляющего сигнала микроконтроллера; обмотка электродвигателя постоянного тока, токоограничивающий резистор и замыкающие контакты реле соединены друг с другом, образуя последовательную схему.
[0018] Для предотвращения какого-либо загрязнения рук пользователя при прикосновении к интеллектуальному унитазу во время использования интеллектуального унитаза пользователю нет нужды прикасаться к сиденью унитаза и/или крышке сиденья, поэтому использование настоящего изобретения удобно для пользователя.
[0019] Дополнительные преимущества и характерные признаки изобретения станут очевидны из нижеследующего описания, и их можно реализовать посредством инструментальных средств и комбинаций, в частности, указанных в прилагаемой формуле изобретения.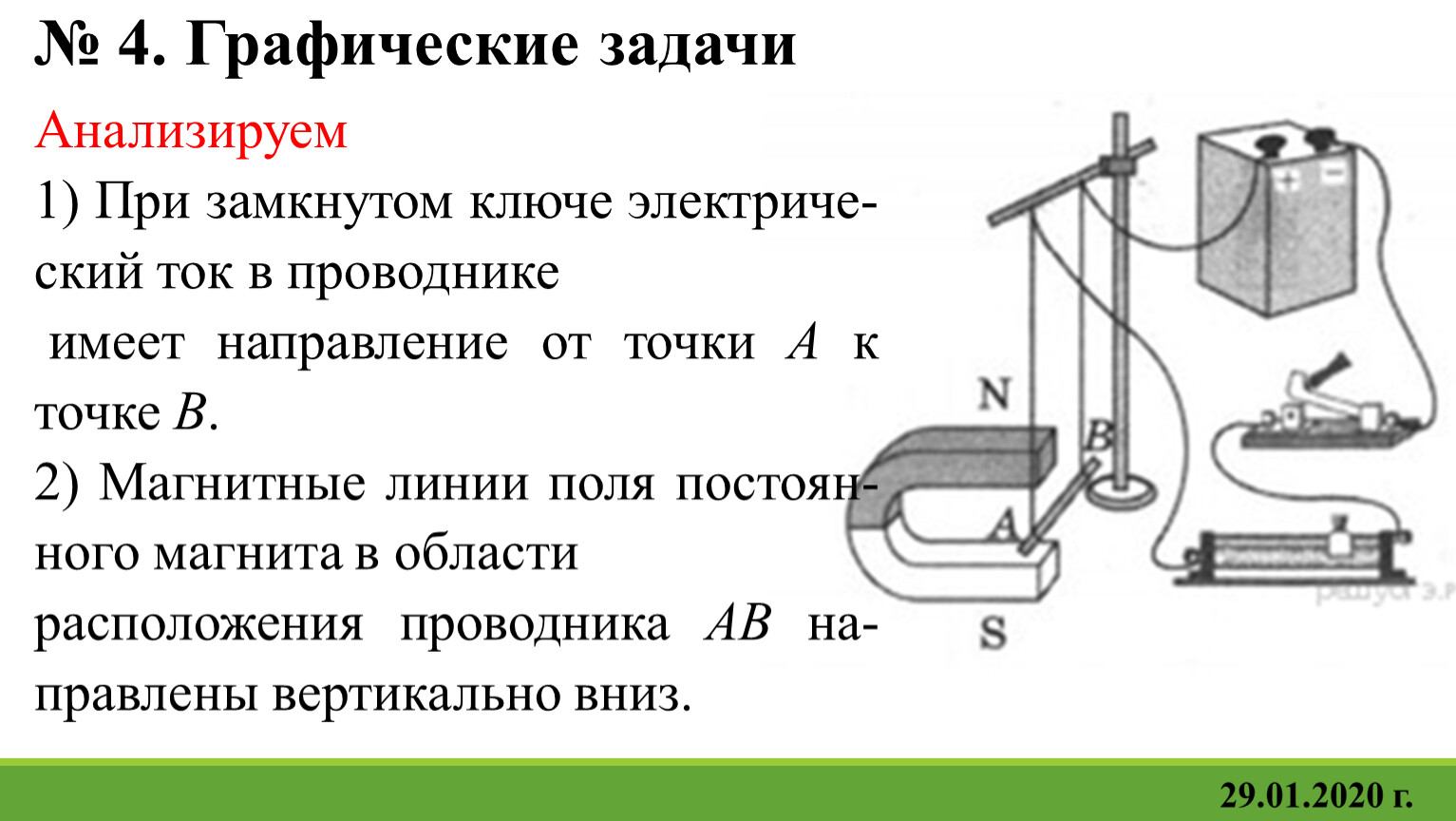
[0020] Дальнейшие цели и преимущества станут очевидны из рассмотрения нижеследующего описания и графических материалов.
[0021] Эти и другие цели, характерные признаки и преимущества настоящего изобретения станут очевидны из нижеследующего подробного описания, сопроводительных графических материалов и прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0022] Фиг. 1 — блок-схема системы управления интеллектуальным унитазом в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
[0023] Фиг. 2 — вид в перспективе интеллектуального унитаза в соответствии с приведенным выше предпочтительным вариантом осуществления настоящего изобретения.
[0024] Фиг. 3 — формы волны для выходной волны, обнаруживаемой микроволновым детектором во время непрерывных передвижений пользователя, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
[0025] Фиг. 4 — блок-схема системы управления интеллектуальным унитазом в соответствии со вторым предпочтительным вариантом осуществления настоящего изобретения.
4 — блок-схема системы управления интеллектуальным унитазом в соответствии со вторым предпочтительным вариантом осуществления настоящего изобретения.
[0026] Фиг. 5 — вид в перспективе двух микроволновых детекторов системы управления в соответствии с приведенным выше вторым предпочтительным вариантом осуществления настоящего изобретения.
[0027] Фиг. 6 — принципиальная схема системы опускания при отключенном питании в соответствии с третьим предпочтительным вариантом осуществления настоящего изобретения
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
[0028] Со ссылкой на фиг. 1—3 графических материалов изображен способ и система управления интеллектуальным унитазом в соответствии с первым предпочтительным вариантом осуществления настоящего изобретения, при этом интеллектуальный унитаз содержит сиденье унитаза и крышку сиденья, связанные на корпусе унитаза. Система управления содержит приводное устройство сиденья унитаза, приводное устройство крышки сиденья и схему управления, при этом схема управления содержит микроволновой детектор, кнопку установки режима, сенсорный переключатель, оставляющий руки свободными, и микроконтроллер.
[0029] Выходные концы микроволнового детектора, кнопки установки режима и сенсорного переключателя, оставляющего руки свободными, соответственно функционально соединены с микроконтроллером, а два выходных конца микроконтроллера соответственно функционально соединены с приводным устройством сиденья унитаза и приводным устройством крышки сиденья.
[0030] Как показано на фиг. 2, микроволновой детектор содержит приёмопередатчик, имеющий высокочастотное микроволновое излучение, такое как излучение с частотой 24,125 ГГц, и антенну-зонд, при этом микроволновой детектор функционально связан с микроконтроллером (MCU) посредством схемы интерфейса ввода-вывода. Микроконтроллер 2 расположен на центральной части верхней крышки 101 корпуса 1 унитаза, при этом микроволновой детектор действует, генерируя электромагнитную волну с частотой 24,125 ГГц для обнаружения объекта, приближающегося к интеллектуальному унитазу, такого как пользователь, перемещающийся перед интеллектуальным унитазом (обычно под углом 30 градусов), на основании частоты отраженной электромагнитной волны и характера ее изменений. Рабочий цикл обнаружения микроволнового детектора составляет около 1,5 секунд. Сенсорный переключатель 3, оставляющий руки свободными, такой как ножной приводной переключатель, предусмотрен спереди у нижнего конца корпуса 1 унитаза.
Рабочий цикл обнаружения микроволнового детектора составляет около 1,5 секунд. Сенсорный переключатель 3, оставляющий руки свободными, такой как ножной приводной переключатель, предусмотрен спереди у нижнего конца корпуса 1 унитаза.
[0031] Для того чтобы повысить эффективность работы интеллектуального унитаза согласно настоящему изобретению, диапазон обнаружения микроволнового детектора 2 определяют относительно средней линии корпуса 1 унитаза, при этом сенсорный переключатель 3, оставляющий руки свободными, расположен там, где диапазон обнаружения имеет радиус обнаружения около 0,5 метров. Когда объект обнаруживается в пределах этого диапазона радиуса обнаружения, микроволновой детектор 2 в течение 0,1 секунд генерирует сигнал.
[0032] Как показано на фиг. 3, если в пределах диапазона обнаружения (имеющего радиус 0,5 метров) обнаруживается объект, из выходного конца микроволнового детектора 2 генерируется низкоуровневый сигнал с импульсом 0,5 секунд. Микроволновой детектор 2 будет повторно активироваться для обнаружения каждые 1,5 секунд.
[0033] Соответственно перемещения пользователя определяются как приближающееся перемещение пользователя, когда пользователь приближается к интеллектуальному унитазу, удаляющееся перемещение пользователя, когда пользователь удаляется от интеллектуального унитаза, и перемещение присутствия пользователя, когда пользователь находится в пределах диапазона интеллектуального унитаза. Приближающееся перемещение пользователя и перемещение присутствия пользователя определяются микроволновым детектором 2 за счет того, что выходной конец микроволнового детектора 2 постоянно генерирует низкоуровневые сигналы. Удаляющееся перемещение пользователя определяется по тому, что выходной конец микроволнового детектора 2 не генерирует ни одного низкоуровневого сигнала в течение 5 секунд.
[0034] Микроконтроллер (MCU) схемы управления интеллектуального унитаза может быть предустановлен в мужской режим работы и в женский режим работы посредством кнопки установки режима. В мужском режиме работы, когда микроволновой детектор обнаруживает пользователя-мужчину, микроволновой детектор будет генерировать низкоуровневый сигнал и отправлять его в микроконтроллер (MCU) схемы управления. Затем сиденье унитаза и крышка сиденья автоматически поворотно поднимаются посредством приводного устройства сиденья унитаза и приводного устройства крышки сиденья. После этого, если пользователь-мужчина хочет опустить сиденье унитаза в мужском режиме использования, пользователь-мужчина, наступив ногой на сенсорный переключатель, оставляющий руки свободными, может привести этот сенсорный переключатель, оставляющий руки свободными, в действие с тем, чтобы поворотно опустить сиденье унитаза приводным устройством сиденья унитаза посредством микроконтроллера. В женском режиме работы, если микроволновым детектором обнаружен пользователь-женщина, микроволновой детектор будет генерировать низкоуровневый сигнал и отправлять его в микроконтроллер (MCU) схемы управления. Затем посредством приводного устройства крышки сиденья поворотно поднимается только крышка сиденья. Иными словами, сиденье унитаза неизменно остается в его первоначальном положении.
Затем сиденье унитаза и крышка сиденья автоматически поворотно поднимаются посредством приводного устройства сиденья унитаза и приводного устройства крышки сиденья. После этого, если пользователь-мужчина хочет опустить сиденье унитаза в мужском режиме использования, пользователь-мужчина, наступив ногой на сенсорный переключатель, оставляющий руки свободными, может привести этот сенсорный переключатель, оставляющий руки свободными, в действие с тем, чтобы поворотно опустить сиденье унитаза приводным устройством сиденья унитаза посредством микроконтроллера. В женском режиме работы, если микроволновым детектором обнаружен пользователь-женщина, микроволновой детектор будет генерировать низкоуровневый сигнал и отправлять его в микроконтроллер (MCU) схемы управления. Затем посредством приводного устройства крышки сиденья поворотно поднимается только крышка сиденья. Иными словами, сиденье унитаза неизменно остается в его первоначальном положении.
[0035] В дополнение, когда микроволновой детектор 2 обнаруживает удаляющееся перемещение, микроконтроллер приводится в действие для закрывания сиденья унитаза и/или крышки сиденья посредством приводного устройства сиденья унитаза и приводного устройства крышки сиденья. Иными словами, в мужском режиме работы в действие для закрывания приводятся крышка сиденья и сиденье унитаза, тогда как в женском режиме работы в действие для закрывания приводится крышка сиденья.
Иными словами, в мужском режиме работы в действие для закрывания приводятся крышка сиденья и сиденье унитаза, тогда как в женском режиме работы в действие для закрывания приводится крышка сиденья.
[0036] Со ссылкой на фиг. 4 и фиг. 5 графических материалов изображен альтернативный первому варианту осуществления настоящего изобретения способ и система управления интеллектуальным унитазом в соответствии со вторым предпочтительным вариантом осуществления настоящего изобретения. Как показано на фиг. 4, интеллектуальный унитаз содержит приводное устройство сиденья унитаза, приводное устройство крышки сиденья и схему управления, при этом схема управления содержит два микроволновых детектора 2А, 2В, кнопку установки режима, сенсорный переключатель, оставляющий руки свободными, и микроконтроллер. Два выходных конца двух микроволновых детекторов соответственно функционально соединены с микроконтроллерами. Как показано на фиг. 5, два микроволновых детектора 2А, 2В симметрично расположены соответственно справа и слева от верхней крышки 101 интеллектуального унитаза, при этом два микроволновых детектора 2А, 2В отправляют низкоуровневые сигналы в микроконтроллер на основании жеста пользователя и эти низкоуровневые сигналы, генерируемые данными двумя детекторами 2А, 2В, могут анализироваться микроконтроллером для приведения в действие приводного устройства сиденья унитаза и приводного устройства крышки сиденья.
[0037] Интеллектуальный унитаз согласно настоящему изобретению сконфигурирован для анализа жеста (т.е. движения руки пользователя слева направо или справа налево) пользователя двумя микроволновыми детекторами 2A, 2B с целью определения того, какой режим работы приводить в действие — мужской или женский. Мужской режим работы и женский режим работы определяются микроконтроллером.
[0038] Например, если микроволновыми детекторами обнаружен жест пользователя слева направо, интеллектуальный унитаз устанавливается в мужской режим работы, то есть в действие посредством MСU приводятся сиденье унитаза и крышка сиденья. Иными словами, MCU не устанавливает мужской режим работы и женский режим работы.
[0039] Если микроволновыми детекторами обнаружен жест пользователя справа налево, посредством MCU в действие приводится крышка сиденья, а сиденье унитаза остается в его первоначальном положении, и, в то же время, интеллектуальный унитаз устанавливается в женский режим работы (или в мужской режим работы).
[0040] В соответствии с настоящим изобретением, жест пользователя (слева направо или справа налево) сконфигурирован для MCU как входной сигнал 1/0, при этом посредством данного входного сигнала 1/0 сиденье унитаза и крышка сиденья могут приводиться в действие для поднятия. Когда микроволновые детекторы обнаруживают движение пользователя, для того чтобы привести в действие поднимающее перемещение сиденья унитаза и крышки сиденья, необходимо объединить низкоуровневый сигнал, генерируемый микроволновым детектором, и сигнал сенсорного переключателя, оставляющего руки свободными. Например, сенсорный переключатель, оставляющий руки свободными, может обеспечивать то, что сиденье унитаза и крышка сиденья поднимаются, когда жест пользователя, в особенности в случае пожилых людей, нельзя четко определить посредством микроволновых детекторов.
[0041] В соответствии с вышеупомянутым изобретением, сиденье унитаза и крышка сиденья могут быть подняты посредством MCU, в то время как микроволновые детекторы обнаруживают перемещение, поэтому пользователю нет нужды прикасаться к сиденью унитаза и крышке сиденья для того, чтобы их поднять. Иными словами, сиденье унитаза и крышка сиденья могут приводиться в действие для поднятия по отдельности или оставаться в их первоначальных положениях посредством жеста пользователя.
[0042] В соответствии с первым предпочтительным вариантом осуществления настоящего изобретения, интеллектуальный унитаз содержит один микроволновой детектор и один сенсорный переключатель, оставляющий руки свободными, при этом мужской режим работы и женский режим работы можно по выбору менять местами. В мужском режиме работы, когда микроволновой детектор обнаруживает перемещение пользователя-мужчины, MCU принимает низкоуровневый сигнал для поднятия сиденья унитаза и крышки сиденья. Сиденье унитаза может быть приведено в действие для опускания, когда ногой пользователя приводится в действие сенсорный переключатель, оставляющий руки свободными. В женском режиме работы MCU приводит в действие для поднятия только крышку сиденья, а сиденье унитаза остается в его первоначальном положении.
[0043] В соответствии со вторым предпочтительным вариантом осуществления настоящего изобретения, интеллектуальный унитаз содержит по меньшей мере два микроволновых детектора, при этом мужской режим работы и женский режим работы также можно по выбору менять местами. При обнаружении микроволновыми детекторами жеста пользователя слева направо интеллектуальный унитаз устанавливается в мужской режим работы (режим мочеиспускания для мужчин), а MCU приводит в действие сиденье унитаза и крышку сидения для поднятия. Если микроволновые детекторы обнаруживают жест пользователя справа налево, то интеллектуальный унитаз устанавливается в женский режим работы (или в мужской режим дефекации). Тогда посредством MCU приводится в действие для поднятия только крышка сиденья, в то время как сиденье унитаза остается в его первоначальном положении.
[0044] Система управления согласно настоящему изобретению также содержит модуль автоматического замедления для опускания сиденья унитаза и крышки сиденья при замедлении движения, при этом модуль замедления запускается посредством запуска электродвигателя постоянного тока. Электродвигатель постоянного тока содержит пять штырей, при этом первый штырь 1 и второй штырь 2 представляют собой соответственно положительный электрод и отрицательный электрод электродвигателя постоянного тока, способного управлять крутящим моментом электродвигателя постоянного тока. Третий штырь 3, четвертый штырь 4 и пятый штырь 5 подключены к потенциометру, при этом два конца сопротивления потенциометра подключены к третьему штырю 3 и четвертому штырю 4. Третий штырь 3 представляет собой штырь +5 В, а четвертый штырь представляет собой штырь GND. Пятый штырь 5 соединен с ползуном потенциометра и представляет собой штырь выборки АЦП (замера напряжения), и он приспособлен для того, чтобы представлять собой измерительный конец, соединенный с микроконтроллером, для замера разных углов сиденья унитаза и крышки сиденья.
[0045] Запуск электродвигателя постоянного тока определяется путем управления напряжением между двумя концами электродвигателя постоянного тока с целью достижения крутящего момента вперед или крутящего момента назад. Например, если первый штырь 1 представляет собой положительный штырь электродвигателя постоянного тока, а второй штырь 2 представляет собой отрицательный штырь электродвигателя постоянного тока, то электродвигатель постоянного тока можно запустить для генерирования крутящего момента вперед, при этом первый штырь 1 имеет высокий уровень напряжения, а второй штырь 2 имеет низкий уровень напряжения. В противном случае, если первый штырь 1 имеет низкий уровень напряжения, а второй штырь 2 имеет высокий уровень напряжения, то электродвигатель постоянного тока можно запустить для генерирования крутящего момента назад. Когда как первый штырь 1, так и второй штырь 2 оба имеют высокий уровень напряжений, электродвигатель постоянного тока не действует. В противном случае, когда как первый штырь 1, так и второй штырь 2 оба имеют низкий уровень напряжений, электродвигатель постоянного тока также не действует.
[0046] Существует два способа регулирования частоты вращения электродвигателя постоянного тока.
[0047] 1. Частоту вращения электродвигателя постоянного тока можно определить посредством разности напряжений между первым штырем 1 и вторым штырем 2, при этом чем больше разность напряжений между первым штырем 1 и вторым штырем 2, тем больше будет частота вращения электродвигателя постоянного тока.
[0048] 2. Частоту вращения электродвигателя постоянного тока можно определить посредством PWM (широтно-импульсной модуляции), при этом PWM модифицирует разность напряжений между первым и вторым штырями 1, 2 как прямоугольный импульс. Если коэффициент заполнения этого прямоугольного импульса является небольшим, то частота вращения электродвигателя постоянного тока является относительно невысокой.
[0049] Предпочтительно к настоящему изобретению применим второй способ регулирования частоты электродвигателя постоянного тока.
[0050] На настоящий момент управление углом сиденья унитаза и крышки сиденья относительно корпуса унитаза осуществляется от 0° до 120° (0—120° представляет собой оптимальный угол, практический угол находится между 0° и 110°).
[0051] Когда сиденье унитаза и крышка сиденья расположены под углом 0°, сиденье унитаза и крышка сиденья находятся в наложенном и связанном друг с другом состоянии. В противном случае, если угол сиденья унитаза и крышки сиденья установлен равным 120°, то сиденье унитаза и крышка сиденья подняты.
[0052] Когда сиденье унитаза и крышка сиденья подняты, угол сиденья унитаза и крышки сиденья может быть определен потенциометром, и этот угол сиденья унитаза и крышки сиденья находится между 110° и 120°. Для того чтобы опустить сиденье унитаза и крышку унитаза, от электродвигателя постоянного тока требуется вращение с коэффициентом заполнения прямоугольного импульса, равным 100%, а углы сиденья унитаза и крышки сиденья замеряются потенциометром.
[0053] 1. Когда электродвигатель постоянного тока вращается на угол между 120° и 75°, частота вращения электродвигателя постоянного тока может быть вычислена как 70 градусов/с, и способ вычисления этой частоты вращения описывается следующим образом:.
[0054] В настоящее время микросхема A/D (аналого-цифровой преобразователь) дискретизирована по 10-битному способу дискретизации, в котором 5 В разделены на 1024 сегмента. Каждый сегмент имеет соответствующее ему напряжение, и однокристальный микрокомпьютер преобразовывает это напряжение в значение A/D.
[0055] Если напряжение, соответствующее 120°, составляет 3,5 В, то значение A/D составляет 716.
[0056] Значение A/D вычисляется один раз в 0,5 секунд. Частота вращения электродвигателя постоянного тока определяется по единичному изменению значения A/D.
[0057] Например, первое замеренное значение A/D равно 120°, а второе замеренное значение A/D равно 85°, и тогда угол вращения электродвигателя постоянного тока составляет 120–85=35°. Таким образом, угловая скорость электродвигателя постоянного тока составляет 70 градусов/с.
[0058] Если фактическая частота вращения электродвигателя постоянного тока больше 70 градусов/с, то PWM посредством алгоритма PI регулирует коэффициент заполнения прямоугольного импульса до менее высокого значения. Если фактическая частота вращения электродвигателя постоянного тока меньше 70 градусов/с, то PWM посредством алгоритма PI регулирует коэффициент заполнения прямоугольного импульса до более высокого значения (значение коэффициента заполнения прямоугольного импульса не достигает 100%).
[0059] 2. Угол электродвигателя постоянного тока находится между 75° и 40°, а его угловая скорость контролируется при 35 градусах/с.
[0060] 3. Угол электродвигателя постоянного тока находится между 40° и 0°, а его угловая скорость контролируется при 25 градусах/с.
[0061] Принципы процессов поднятия и опускания сиденья унитаза и крышки сиденья являются одинаковыми, без учета установки значения угловой скорости и частоты вращения.
[0062] Когда сиденье унитаза и крышка сиденья находятся в наложенном и связанном друг с другом состоянии, то угол электродвигателя постоянного тока, определяемый потенциометром, равен 0°.
[0063] Способ управления интеллектуальным унитазом включает следующие этапы:
[0064] 1. От электродвигателя постоянного тока требуется вращение с коэффициентом заполнения прямоугольного импульса, равным 100%, и этот угол электродвигателя постоянного тока замеряется потенциометром.
[0065] 2. Угол электродвигателя постоянного тока находится между 0° и 45°, а его угловая скорость контролируется при 70 градусах/с.
[0066] 3. Угол электродвигателя постоянного тока находится между 45° и 80°, а его угловая скорость контролируется при 35 градусах/с.
[0067] 4. Угол электродвигателя постоянного тока находится между 80° и 120°, а его угловая скорость контролируется при 25 градусах/с.
[0068] На фиг. 6 показан принцип схемы опускания при отключенном питании в соответствии с третьим предпочтительным вариантом осуществления настоящего изобретения.
[0069] Автоматическое поднимающее и опускающее перемещение сиденья унитаза и крышки сиденья можно выполнить посредством автоматического приспособления замедления и схемы управления MCU. Схема опускания при отключенном питании представляет собой схему защиты для схемы управления MCU. В нормальных условиях схема опускания при отключенном питании бездействует. Схема опускания при отключенном питании действует только в ситуации отсутствия питания с целью предотвращения опускания сиденья унитаза и крышки сиденья со слишком большой скоростью.
[0070] Каждое из приводных устройств, приводное устройство сиденья унитаза и приводное устройство крышки сиденья, содержит электродвигатель постоянного тока M1, микросхему DRV8843 управления двигателем, и схему опускания при отключенном питании, при этом выходной конец микросхемы DRV8843 управления двигателем подключен к выходному концу электродвигателя постоянного тока, а управляющий конец микросхемы управления двигателем подключен к первому выходному концу управляющего сигнала микроконтроллера (MCU). Схема опускания при отключенном питании содержит токоограничивающий резистор R1, триод Q1 и реле RLY1. Коллектор триода Q1 подключен к первому концу контрольной катушки реле RLY1, а эмиттер триода Q1 подключен к заземлению. Второй конец контрольной катушки реле RLY1 подключен к источнику питания, а базовый электрод триода Q1 подключен к выходному концу второго управляющего сигнала микроконтроллера через сопротивление R2. Обычно обмотка электродвигателя постоянного тока М1, токоограничивающий резистор R1 и реле R1 подключены друг к другу в замкнутый контакт с образованием последовательной схемы.
[0071] В ситуации отключенного питания работой реле RLY1 управляет MCU посредством сопротивления R2 и триода Q1, причем при размыкании замкнутого контакта реле RLY1 электродвигатель постоянного тока M1 может приводиться в действие посредством микросхемы IC2, приводящей в действие двигатель (драйвер двигателя IC DRV8843 с двойной мостовой схемой управления от Texas Instruments).
[0072] В ситуации отсутствия питания замыкающее контакт реле RLY1 автоматически замыкается посредством внутреннего пружинного механизма. Сопротивление R1 и обмотка двигателя соединяются друг с другом, образуя схему управления с обратной связью. Когда двигатель вращается внешним усилием, в схеме управления с обратной связью генерируется ток, и этот ток потребляется внутренним сопротивлением сопротивления R1 и обмоткой двигателя. Посредством этого тока может быть запущено вращение двигателя, и, таким образом, сиденье унитаза и крышку сиденья можно медленно опустить.
[0073] Настоящее изобретение предусматривает высокочастотную микроволновую методику обнаружения, приспособленную для выполнения функции автоматического обнаружения и поднятия сиденья унитаза и крышки сиденья, и интеллектуальный унитаз может по выбору действовать в мужском или женском режиме работы посредством жеста пользователя. В то же время для поднимающего и опускающего перемещения сиденья унитаза и крышки сиденья с целью достижения нормальной скорости поднятия сиденья унитаза и крышки сиденья применяется автоматическое приспособления замедления, а в ситуации отсутствия питания сиденье унитаза и крышка сиденья не могут опускаться быстро. В дополнение, для пользователей разного возраста и роста предусмотрен сенсорный переключатель, оставляющий руки свободными.
[0074] Специалисту в данной области техники будет понятно, что вариант осуществления настоящего изобретения, показанный в графических материалах и описанный выше, является лишь примерным и не предусмотрен как ограничивающий.
[0075] Таким образом, видно, что цели настоящего изобретения были полностью и эффективно достигнуты. Варианты осуществления были показаны и описаны в целях иллюстрации функциональных и конструктивных принципов настоящего изобретения, и они допускают изменение без отступления от этих принципов. Поэтому данное изобретение включает все модификации, охватываемые в пределах духа и объема нижеследующей формулы изобретения.
Как управлять мотором постоянного тока
Двигатель постоянного тока
Для начала рассмотрим повнимательней обычный двигатель постоянного тока. Любой двигатель имеет две основные части — ротор и статор. В коллекторном двигателе статор — неподвижная часть, состоит из постоянных магнитов (или в более мощных двигателях электромагнитов). Ротор (якорь) — вращается, совмещён с валом двигателя и состоит из многих катушек (как минимум трех). Коллектор (щёточно-коллекторный узел) отвечает за переключение выводов катушек ротора. Ток в таком двигателе подводится к катушкам ротора через скользящие контакты (или щётки). В один момент времени подключена только одна катушка, она и создаёт момент вращения двигателя за счет проходящего тока.
С точки зрения базовых элементов схемотехники любой двигатель можно представить в виде следующей эквивалентной схемы:
Когда мотор подключён источнику постоянного тока и еще не начал вращаться, то он представляет из себя обычное сопротивление. То есть через него течет ток согласно закону Ома и сопротивлению его обмотки. Преобладает компонента R. Индуктивность начинает влиять когда напряжение не постоянное, например, если мотор питается от ШИМ (PWM) сигнала.
Сопротивление ротора и индуктивность, как правило, очень малы. Его можно померить обычным мультиметром. Небольшие модельные моторы имеют сопротивление 1-10 Ом. Поэтому, при старте мотора (когда он ещё не начал вращаться), ток сильно превышает рабочий ток мотора и если мотор долго будет неподвижен (его заклинило), то такой высокий ток может привести к перегреву мотора и выходу из строя.
Индуктивность катушек ротора пытается поддерживать ток протекающий через обмотки постоянным. Ее влияние заметно только когда напряжение меняется. Когда мотор начинает вращаться, то коллектор начинает переключать катушки ротора, что вызывает изменение напряжения. Индуктивность пытается в эти моменты поддерживать ток протекающий через мотор на постоянном уровне за счет напряжения.
Во время вращения катушки ротора начинают вырабатывать ток (как генератор) — возникает обратная ЭДС. Чем быстрее вращается ротор, тем выше обратная ЭДС возникающая в катушках, а так как она направлена против напряжения питания, то ток потребляемый мотором снижается.
В дальнейшем нам понадобятся следующие выводы:
пока мотор не начал вращаться он является сопротивлением
если приложить к мотору изменяющееся напряжение (например PWM), то индуктивность будет иметь большое влияние, она будет сопротивляться изменению тока через мотор
когда мотор вращается, то он является генератором, и за счет этого потребляемый ток снижается (итоговое напряжение равно V — Vbemf).
Как подключить мотор к МК
В данной статье мы будем разбираться как управлять с помощью МК скоростью и направлением вращения обычным двигателем постоянного тока.
Для того чтобы коллекторный мотор постоянного тока начал вращаться, достаточно подать на него определённое напряжение. Полярность данного напряжения будет определять направление его вращения, а величина напряжения — скорость вращения. Напряжение нельзя менять безгранично. Каждый мотор рассчитан на определённый диапазон напряжений. При повышении напряжения ток через мотор будет расти, и он начнётся перегреваться и может сгореть. На следующем графике некоего мотора хорошо видна взаимосвязь его основных показателей.
Максимальной
мощности (Torque — крутящий момент) мотор
достигает при максимальном токе. И
зависимость тока и момента — линейная.
Максимальной скорости двигатель
достигает при отсутствии нагрузки (на
холостых оборотах), при увеличении
нагрузки скорость вращения падает.
Номинальное рабочее напряжение указано
в паспорте на двигатель и именно для
него и приведён и этот график. Если же
снижать напряжение, то скорость вращения,
и все остальные показатели будут тоже
падать. Как правило, ниже 30-50% от
номинального напряжения мотор перестанет
вращаться. Если же мотор не сможет
прокрутить вал (его заклинило), то по
сути станет сопротивлением и потребляемый
ток достигает максимальной величины,
зависящей от внутреннего сопротивления
его обмоток. Обычный мотор не рассчитан
на работу в таком режиме и может сгореть.
Посмотрим как меняется ток от нагрузки на реальном моторе R380-2580.
Мы
видим, что рабочее напряжение данного
мотора — 12В, потребляемый ток под
нагрузкой — 1.5А. Ток останова мотора
вырастает до 8А, а в холостом же вращении,
потребляемый ток равен всего 0.8А.
Как мы знаем, порт микроконтроллера не может выдать ток больше 50мА, и напряжение питания 12В для него слишком большое. Для управления моторами нам понадобится электронный ключ — транзистор, возьмём обычный биполярный транзистор NPN и подключим его по следующей неправильной схеме.
Чтобы мотор начал вращаться, на базу транзистора необходимо подать небольшой ток, далее транзистор откроется и сможет пропустить через себя гораздо больший ток и напряжение — мотор будет вращаться. Стоит отметить что, если мы соберём такую схему, то транзистор очень скоро, если не сразу, выйдет из строя. Чтобы этого не произошло, его необходимо защитить.
Как мы уже знаем одна из компонент мотора — индуктивность — сопротивляется изменению тока. Поэтому, когда мы закроем транзистор, чтобы выключить мотор, то сопротивление транзистора резко увеличится и он перестанет пропускать через себя ток. Однако индуктивность будет сопротивляться этому, и для того, чтобы удержать ток на прежнем уровне, по закону Ома, напряжение на коллекторе транзистора начнёт резко повышаться (может достигнуть даже 1000В, правда очень на малое время) и транзистор сгорит. Чтобы этого не произошло необходимо параллельно обмоткам мотора поставить диод, который откроет путь для обратного напряжения и замкнёт его на обмотке мотора, тем самым защитит транзистор.
Также, все постоянные моторы имеют еще одну неприятность — при вращении механический контакт в коллекторе не идеален, щётки искрят в процессе работы, создавая помехи, что может привести к сбою микроконтроллера. Чтобы снизить эти помехи, необходимо использовать конденсаторы небольшой ёмкости, подключенный параллельно выводам мотора (как можно ближе к самому мотору). Вот окончательная правильная схема (диод может быть не обязательно Шоттки, но он предпочтителен).
Биполярные транзисторы в открытом состоянии они ведут себя как диоды (на них падает около 0.7 В). А это, в свою очередь, вызывает их большой нагрев на больших токах и снижает КПД схемы управления мотором. Поэтому лучше управлять моторами с помощью полевых (MOSFET) транзисторов. В настоящее время они достаточно распространены и имеют невысокую цену. Их низкое сопротивление в открытом состоянии позволяет коммутировать очень высокие токи с минимальными потерями. Однако и у них есть свои недостатки. Так как MOSFET транзисторы управляются напряжением, а не током (и обычно оно составляет 10В), то нужно или выбирать специальные логические MOSFET, которые могут управляться низким напряжением — 1.8 .. 2.5В или использовать специальные схемы накачки напряжения (драйверы полевых транзисторов). Как выбирать MOSFET под вашу схему мы рассмотрим в других статьях, на конкретных приборах.
Теперь, подавая на выход микроконтроллера логическую единицу, мы заставим мотор вращаться, а логический ноль — остановится. Однако вращаться он будет с постоянной скоростью и только в одну сторону. Хотелось бы иметь возможность менять направление вращения мотора, а также его скорость. Рассмотрим, как этого можно добиться с помощью микроконтроллера.
H-Мост — меняем направление вращения мотора
Для управления направлением вращения мотора существует специальная схема, которая называется H-мост (схема выглядит как буква H).
Работает
схема очень просто. Если открыть верхний
правый и левый нижний транзистор, то на
клемах мотора справа будет плюс, а слева
будет минус. Мотор будет крутиться в
одну сторону. Если открыть левый верхний
и правый нижний, то справа будет минус,
а слева плюс — полярность тока сменится,
и мотор будет крутиться в другую сторону.
Паразитные диоды внутри MOSFET транзисторов
будут защищать всю схему (параметры
этих диодов не очень хорошие и в реальных
схемах могут понадобиться более
быстродействующие диоды Шотке параллельно
паразитным диодам, для снижения нагрева
полевого транзистора), так что лишние
компоненты не понадобятся, кроме
искрогасящего конденсатора.
В схеме H-моста в качестве нижних транзисторов всегда используются N-канальные, а вот верхние могут быть как N-канальные, так и P-канальные. P-канальными транзисторами в верхнем ключе проще управлять, достаточно сделать схему смещения уровня напряжения на затворе. Для этого можно использовать маломощный N-канальный полевой или биполярный транзистор. Нижним транзистором можно управлять напрямую от МК, если выбрать специальный логический полевой транзистор.
Если в вашей схеме будет использоваться высоковольтный мотор постоянного тока (больше 24В) или мощный мотор с токами более 10А, то лучше использовать специальные микросхемы — драйверы MOSFET транзисторов. Драйверы управляются, как правило, сигналами микроконтроллера от 2 до 5В, а на выходе создают напряжение необходимое для полного открытия MOSFET транзисторов — обычно это 10-15В. Также драйверы обеспечивают большой импульсный ток необходимый для ускорения открытия полевых транзисторов. С помощью драйверов легко организовать управление верхним N-канальным транзистором. Очень хорошим драйвером является микросхема L6387D от компании ST. Данная микросхема хороша тем, что не требует диода для схемы накачки напряжения. Вот так она подключается для управления H-мостом на 2-х N-канальных транзисторах.
N-канальные
полевые транзисторы, стоят дешевле
P-канальных, а также имеют меньшее
сопротивление в открытом состоянии,
что позволяет коммутировать большие
токи. Но ими сложнее управлять в верхнем
положении. Проблема использования
N-канального транзистора в верхнем ключе
состоит в том, что для его открытия нужно
подать напряжение 10В относительно
Истока, а как вы видите на схеме там
может быть все напряжение питания
мотора, а не 0 вольт. Таким образом, на
базу необходимо подать 10В + напряжение
питания мотора. Нужна специальная
bootstrap схема для повышения напряжения.
Обычно, для этих целей используется
схема накачки напряжения на конденсаторе
и диоде. Однако такая схема работает
только, если вы постоянно подзаряжаете
конденсатор — открывая, закрывая нижний
транзистор (в ШИМ управлении). Для
возможности поддерживания верхнего
транзистора постоянно открытым нужно
еще усложнять схему — добавлять схему
внешней подпитки конденсатора. Вот
пример схемы управления N-канальными
транзисторами без использования
микросхем драйверов.
Перейдём к управлению скоростью вращения мотора.
ШИМ сигнал — управляем скоростью вращения мотора
Моторы постоянного тока имеют линейную зависимость скорости вращения от приложенного напряжения. Таким образом, чтобы снизить скорость вращения, надо подать меньше напряжения. Но надо помнить, что с падением напряжения, у мотора падает мощность. Поэтому, на практике, можно управлять скоростью мотора только в пределах 30%-50% от полной скорости вращения мотора. Для управления скоростью мотора без потери мощности, необходима обратная связь от мотора по оборотам вращения, например как в электрическом шуруповерте. Такой режим управления, требует более сложной схемы. Мы же будет рассматривать простой вариант — управление скоростью мотора без обратной связи.
Итак, нам необходимо менять напряжение подаваемое на мотор. В нашем распоряжении есть MOSFET транзистор. Мы помним, что наш мотор имеет индуктивность. Индуктивность сопротивляется изменению тока. И если быстро включать и выключать напряжение на моторе, то в момент выключения ток будет продолжать течь благодаря индуктивности. А мотор будет продолжать вращаться по инерции, а не остановится. Но естественно, вращаться он будет медленнее, среднее напряжение на его обмотках будет меньшее.
Микроконтроллер, как раз, отлично умеет генерировать импульсный ШИМ (PWM) сигнал. А мотор умеет интегрировать данный сигнал (усреднять) за счёт индуктивности обмоток и инерции ротора. От коэффициента заполнения (скважности) ШИМ сигнала как раз и будет зависеть полученное мотором среднее напряжение, а значит и скорость.
Какая же частота ШИМ нужна для лучшего управления мотором? Ответ очень простой, чем больше, тем лучше. Минимальная частота зависит от индуктивности мотора, а также массы ротора и нагрузки на вал мотора. Если смоделировать в электрическом симуляторе (например, PROTEUS) ШИМ управление мотором, то будет видно, что чем больше частота ШИМ, тем более ровный ток протекает через мотор (ripple current — снижается при увеличении частоты). Низкая частота:
высокая
частота:
Если же частота упадёт ниже определённого уровня, ток станет разрывным (будет падать до нуля) и в итоге мотор не сможет крутиться.
Отлично, все просто! Делаем частоту ШИМ побольше, например 1 МГц, и любому мотору хватит. В жизни же, все не так просто. Для понимания всех возможных проблем можно упрощенно принять затвор MOSFET транзистора за идеальный конденсатор. Для того чтобы транзистор полностью открылся, конденсатор необходимо зарядить до 10В (на самом деле меньше). Чем больше ток, который мы можем вкачать в конденсатор, тем быстрее он зарядится, а значит быстрее откроется транзистор. В процессе открытия транзистора, ток и напряжение на нем будут максимальными, и чем больше это время, тем сильнее нагреется транзистор. В datasheet обычно есть такой параметр как Qgate — полный заряд, который надо передать транзистору, чтобы он открылся полностью.
Чем меньше эта величина, тем меньшей ток нужен для управления данным транзистором. Естественно, такой ток нужен только на очень короткое время — какое, опять же написано в datasheet — tr, обычно оно измеряется в наносекундах. Чтобы выдать такой ток, нужны специальные драйверы, если же мы управляем логическим MOSFET напрямую от микроконтроллера, то мы не сможем обеспечить такой ток. Поэтому для защиты микроконтроллера необходимо перед базой MOSFET ставить резистор, а это сильно замедляет время открытия. В итоге, микроконтроллер в прямом управлении не может обеспечить более 1-2 мкc на открытие и закрытие транзистора. Время открытия и закрытия должно занимать не более 10% длительности ШИМ сигнала. Таким образом, мы сразу получаем ограничение в частоте — 50 000 Гц. Дополнительно, сам микроконтроллер должен иметь возможность генерировать ШИМ сигнал с возможностью хотя бы 8 битного управления шириной ШИМ (для этого требуется большая рабочая частота МК). В итоге, обеспечить большую частоту ШИМ не так просто. Так же, на высоких частотах, начитает мешать паразитные ёмкости и индуктивности. На плате, которую можно сделать дома, получить частоту ШИМ больше 300 кГц, очень сложно. Трассировка платы должна быть сделана идеально. Для снижения требований к плате, в настоящее время выпускаются специальные MOSFET, объединённые с драйверами управления, они позволяют на заводских, многослойных платах получить частоту управления MOSFET в 2МГц.
Индуктивность моторов не такая уж маленькая, и такие большие частоты не нужны. Для управления моторами постоянного тока вполне достаточно 8 кГц, лучше около 20кГц (за звуковым диапазоном).
Дополнительно стоит отметить, что для снижения стартового тока необходимо плавно поднимать на старте частоту ШИМ. А еще — лучше контролировать стартовый ток мотора с помощью датчиков тока.
ШИМ управление мотором предполагает очень быстрое изменение напряжение от 0 для максимального, что порождает большие проблемы при трассировке платы. Перечислим коротко правила, которые необходимо соблюдать при трассировке платы.
Земли управления моторами и микроконтроллера обязательно должны быть разделены, соединение в одной точке тонким проводником, например 0.3мм, как можно ближе к проводам питания всей схемы
Драйвера управления MOSFET должны быть как можно ближе к самим MOSFET транзисторам
Исполнение управляющей области обязательно двухсторонее, желательно с земляным слоем с одной стороны. При импульсном управлении возникают электромагнитные помехи, чтобы снизить их, земляной слой должен быть рядом.
Обязательно наличие конденсатора как можно ближе к зоне прохождения больших импульсных токов. Если такого конденсатора не будет, то напряжение на линии питания будет сильно проседать и микроконтроллер будет постоянно сбрасываться. Также без такого конденсатора, за счёт индуктивности проводов питания, напряжения на линии питания может увеличиться в несколько раз и компоненты выйдут из строя!
Более подробно мы рассмотрим как работают эти правила на конкретных приборах.
ШИМ сигнал в H-мосте
Чтобы можно было менять направление вращения и скорость — нужна схема H-моста, а для регулирование скорости нужно управлять транзисторами ШИМ сигналом. В схеме H-моста четыре транзистора. Как лучше ими управлять? На какой транзистор подавать ШИМ сигнал? Разберёмся в этом вопросе (рекомендуем прочитать очень подробную статью на эту тему).
Рассмотрим нашу схему с точки зрения нагрева транзисторов. Это один из основных критериев, по которому наш прибор может выйти из строя. Полевой транзистор состоит из двух элементов — собственно транзистор и паразитный диод. В схеме управления мотором оба элемента работают. Нагрев полевого транзистора происходит в следующие моменты времени:
когда транзистор открыт, нагрев идёт из-за сопротивления в открытом состоянии Rdson, пропорционально времени открытия транзистора выделяется мощность P = I * I * Rdson
когда транзистор закрыт, то ток ЭДС мотора идёт через диод, то есть нагрев идет из-за диода P = I * U diode forward (как правило 1В)
когда транзистор переключается из открытого состояния в закрытое, то нагрев пропорционален времени открытия и закрытия транзистора
Посмотрим, как влияет схема управления на нагрев нашим электронных ключей. Допустим, что мы управляем мотором ШИМ сигналом со скважностью 50% и мотор крутится в одну сторону.
Самый простой вариант — применить ШИМ сигнал к одному из двух транзисторов, а второй оставить все время открытым. Обычно, ШИМ в этом случае подаётся на нижний транзистор (N типа), который обычно быстрее. В этом случае нагрев нижнего будет больше верхнего на величину тепла выделяемого при переключениях транзистора. Чтобы сравнять счёт, можно попеременно подавать ШИМ сигнал то на верхний (если они одинаковые), то на нижний транзистор. Также можно подавать ШИМ на оба транзистора одновременно, но из-за разницы в транзисторах это будет не эффективно, а также будет увеличивать нагрев за счёт переключения транзисторов. При такой схеме управления, два других транзистора работают как диоды. К счастью, наибольший ток через диод будет при наибольшей скважности ШИМ, при этом диод будет задействован очень малое время.
Для исключения тока через диоды, которые дают существенный нагрев, можно мотор никогда не отключать от напряжения, а вместо этого, крутить его в обратную сторону. Таким образом, мы должны, например 70% ШИМ сигнала крутить вправо, а 30% влево. Это даст в итоге 70%-30%=40% скорости вправо. Но при этом не будут задействованы диоды. Такой метод управления называется комплиментарным. Такая схема требует большого конденсатора на линии питания, а также источника питания, который может потреблять ток (например аккумулятора).
Вместо вращения мотора в разные стороны, можно помогать диодам — а именно тормозить мотор, открывать два верхних транзистора в момент низкого уровня ШИМ сигнала. На практике, все эти методы не дают существенного изменения скорости вращения двигателя, но позволяют эффективно управлять нагревом полевых транзисторов. Более подробно про особенности различных схем управления можно в этой статье.
На этом мы закончим нашу статью про моторы. Теперь можно перейти к практике — будем делать плату управления 4-мя моторами для робота.
Электродвигатели постоянного тока — Справочник химика 21
Электродвигатели постоянного тока применяют при отсутствии источника переменного тока и в случаях, когда требуются регулирование скорости в широких пределах или большой начальный пусковой момент. [c.31]Наиболее часто приводом компрессорной установки являются электродвигатели. Синхронные электродвигатели имеют абсолютно жесткую характеристику и не допускают изменения частоты вращения ротора. Асинхронные двигатели с короткозамкнутым ротором, которые наиболее часто применяются для небольших компрессоров из-за своей дешевизны, также имеют жесткую характеристику. Изменение частоты вращения их роторов соответствует величине скольжения (2%), а это ничтожно мало. Асинхронные двигатели с фазным ротором при включении сопротивлений в цепь статора допускают в ограниченном диапазоне изменение частоты вращения, но работают на этих режимах неэкономично. Только электродвигатели постоянного тока имеют мягкую характеристику. На промышленных предприятиях, как правило, нет постоянного тока, а двигатели, питаемые от выпрямителей, сложны в эксплуатации, имеют большие энергетические потери и дороги. Все эти причины не позволяют широко использовать плавное изменение частоты вращения вала для изменения производительности компрессора. [c.293]
Электротележки приводятся в движение электродвигателями постоянного тока. Мощность двигателей составляет 0,8—6 кВт. Источником питания двигателей являются щелочные и кислотные аккумуляторные батареи. [c.224]
Учитывая пониженный к. п. д. электрических двигателей, допускающих такое регулирование, особенно при пониженных частотах вращения,, в технологических линиях производства полиэтилена один компрессор заменяют иногда двумя половинной производительности, причем приводом для одного из них служит синхронный электродвигатель, работающий при постоянной частоте вращения, а для другого — электродвигатель постоянного тока, работающий при переменной частоте вращения. Регулирование осуществляют, сочетая изменение частоты вращения одного двигателя с пуском или остановкой другого. [c.643]
Для вращения труб при автоматической сварке используются вращатели, состоящие из рамы и двух опор с катками. Катки одной опоры имеют привод от электродвигателя постоянного тока и прижим трубы. Вторая опора является поддерживающей и может перемещаться в горизонтальном направлении по раме. [c.331]
Для привода транспортеров используют чаще всего трехфазные электродвигатели напряжением 220 в с частотой 60 гц. Для установления постоянной скорости применяют электродвигатели постоянного тока. Цилиндрические прямозубые и косозубые редукторы используют при понижении скорости в отношении 10 1 червячные редукторы — в отношении 100 1. [c.7]
Регулирование изменением частоты вращения. Этот способ возможен при использовании в качестве привода двигателей с регулируемой частотой вращения. К таким двигателям относятся электродвигатели постоянного тока, паровая турбина, двигатели внутреннего сгорания и асинхронные двигатели с фазным ротором или регулируемой частотой тока, допускающие плавное изменение частоты вращения. [c.62]
Шпиндель 19 приводят в движение через двухскоростную коробку передач с передаточным числом 1 1 или 1 . 25 и клиноременную передачу 20 от электродвигателя постоянного тока. Число оборотов шпинделя можно плавно регулировать в диапазоне 1-600. Подключение коробки передач производят специальной рукояткой. [c.85]
На рис. 2-24 показана конструкция печи ДС-5МТ емкостью 5 т. Корпус печи цельный цилиндрический днище выполнено в виде усеченного конуса, покоящегося на люльке, опирающейся двумя своими дугообразными рельсами на четыре катка, смонтированных на фундаментных рамах механизма наклона (см. рис. 2-12,6). Привод механизма наклона электромеханический с двигателем переменного тока, редуктором и двумя зубчатыми передачами. Стойки механизма подъема электродов телескопические, перемещающиеся в вертикальных шахтах, закрепленных на люльке. Трубчатые рукава стоек несут электрододержатели с электродами механизм зажатия электрода пружинно-пневматический. Перемещение электродов осуществляется вручную механизмом с приводом, состоящим из электродвигателя постоянного тока и двухступенчатого червячного редуктора. Загрузка печи верхняя корзиной с секторным дном. Над сводом печи имеется портал с площадкой, к которой свод подвешен с помощью цепей. При загрузке электроды поднимают в верхнее положение, свод приподнимают с помощью привода с двигателем переменного тока и винтовым подъемным механизмом, а корпус печи выкатывают из-под портала в сторону рабочего окна. Для выката печь установлена на тележку с восемью катками, из которых четыре — приводные рельсы тележки, имеющиеся на люльке, при горизонтальном положении люльки являются продолжением такого же пути на полу цеха. Привод тележки состоит из двигателя переменного тока, червячного редуктора и системы зубчатых передач. Во избежание самопроизвольного движения тележки при наклоне печи ее фиксируют специальными замками. Дверца рабочего отверстия имеет цепной механизм подъема с электромеханическим приводом. Разлив металла ведут через сливное отверстие и желоб. Ток подводится к корпусу электрододержателя дву- [c.69]
Установка «Тайфун» (рис. 6.11.) выполнена в виде цилиндрической испытательной камеры со скошенным дном, в центре которой на вертикальном валу закреплены диск с сегментами или Т-образная вращающаяся трубка. Вал приводится во вращение электродвигателем постоянного тока скорость вращения регулируется вариатором типа РНО-250-05. Абразив поступает самотеком из бункера в центральный патрубок вращающейся трубки и выбрасывается из нее на образцы за счет центробежной силы, возникающей при вращении. По внутреннему периметру испытательной камеры можно расположить 20 образцов. [c.94]
Установка для измерения поляризационных кривых иа вращающемся дисковом электроде. В состав такой установки прежде всего входит электродвигатель постоянного тока, на валу которого укрепляется исследуемый электрод. Изменение скорости его вращения достигается изменением напряжения, подаваемого на мотор. Электрод можно вращать также с помощью двигателей трехфазного тока, которые обладают стабильной скоростью вращения. В этом случае электрод соединяется с мотором через систему шкивов передачей из крученой капроновой нити, натираемой канифолью. При этом скорость [c.249]
С ПОМОЩЬЮ винтовой передачи от электродвигателя постоянного тока с независимым возбуждением, позволяющим в широких пределах регулировать подачу электрода. Управление подачей электрода выполняется специальным автоматическим регулятором. Питание станка осуществляется от генератора постоянного тока (220 В, 4,8 кВт), приводимого во вращение трехфазным двигателем мощностью 7 кВт. Постоянный ток преобразуется в электрические импульсы с помощью релаксационного / С-генератора, позволяющего получить пять режимов обработки. Электрооборудование станка заключено в отдельный блок панель управления 8 установлена на станине. Выносной стол 5, на котором закрепляются обрабатываемые детали, установлен на угловом [c.365]
Барабан приводится во вращение электродвигателем постоянного тока, позволяющим производить регулировку скоростей вращения барабана, т. е. скорости обкатки. [c.504]
Ванна печи вращается с помощью механизма, приводимого электродвигателем постоянного тока. Общее передаточное число механизма вращения ванны составляет 1 975 000, что обеспечивает вращение ее со скоростью 1 оборот за 33 ч. Схема управления электродвигателем привода позволяет плавно снижать скорость вращения печи дг> 1 оборота за 132 ч. [c.168]
Регулирование изменением числа оборотов насоса. Изменение числа оборотов насоса вед т к изменению его характеристики и, следовательно, к изменению рабочего режима (рис. 2.36). Для осуществления регулирования из-Q менением числа оборотов необходимы — двигатели с переменным числом оборо-Рис. 2.36. Регулирование тов. Такими двигателями являются насоса изменением числа электродвигатели постоянного тока, па-оборотов ровые и газовые турбины и двигатели [c.218]
Для того чтобы иметь возможность изменять частоту вращения, часто применяют электродвигатель постоянного тока. [c.233]
Все трубы и элементы системы охлаждения, кроме обмоточной меди и соединительных шлангов, выполнены из нержавеющей стали. Основная схема имеет резервные дублирующие элементы. При падении давления воды в системе автоматически включаются резервные насосы. Привод насосов осуществляется трехфазными двигателями переменного тока. Кроме того, они могут приводиться во вращение резервными электродвигателями постоянного тока, питаемыми от аварийных агрегатов. [c.102]
Потребляемая насосом мощность (кет) ири работе его с электродвигателем постоянного тока определяется по формуле (282) [c.374]
Для обеспечения такого регулирования требуется применение двигателя, позволяющего изменять скорость вращения без существенного снижения к. п. д., например электродвигателя постоянного тока, паровой или газовой турбины, двигателя внутреннего сгорания и т. д. В том случае когда основной двигатель не позволяет изменять скорость вращения, редукцию оборотов вала насоса можно осуществлять регулирующей гидромуфтой (гидротрансформатором), или при помощи другой передачи. [c.387]
Вращение ротора — от электродвигателя постоянного тока с тиристорным преобразователем. [c.612]
Механизм подачи включает редуктор, электродвигатель постоянного тока с переменной частотой вращения в зависимости от напряжения питания и два ролика, из которых один ведущий, а второй подпружинен н служит для лучшего защемления прутка при подаче его в трубку нагревателя. Включение механизма подачи присадочного прутка дистанционное и осуществляется с рукоятки пистолета. [c.98]
Установка состоит из верхней 13 и нижней 5 массивных плит, соединенных колоннами 6 с помощью башмаков 4, основания 3, В центре нижней плиты закреплена втулка 2, служащая направляющей винта 1, перемещаемого вращением гайки 14.К винту неподвижно присоединен нижний захват 7 и корпус рабочей камеры 8, Верхний захват 9 связан с тягой 10, шарнирно соединенной с нагружающим рычагом 11. Рычаг поворачивается в кронштейне 12, а другим концом опирается на пружину 17, величина сжатия которой может регулироваться перемещением поперечин 15 и 16 по направляющим колоннам вращением маховика 2/, жестко связанного с винтом 20. Переменная составляющая нагрузки создается при мягком способе нагружения узлом динамического нагружения 22, а при жестком способе нагружения — кривошипно-шатунным механизмом 23, которые располагаются на конце рычага. Вращение неуравновешенных масс узла динамического нагружения осуществляется через гибкий вал электродвигателем постоянного тока 24. Регулируемые упоры 19 пре- [c.45]
На отдельных ВПУ применены системы управления подачей насосов-дозаторов изменением частоты вращения электродвигателей постоянного тока или при установке электромагнитных муфт скольжения, а также системы с непосредственным измерением расхода дозируемого раствора и регулированием подачи возвратом части его. [c.265]
Вторую группу образуют устройства, изменяющие частоту враш,ения рабочего колеса (характеристику нагнетателя). При этом характеристика сети не меняется. Известно много устройств, позволяющих изменять частоту вращения рабочего колеса электродвигатели постоянного тока, фрикционные передачи, гидромуфты и индукторные муфты скольжения и др. В вентиляционно-отопительной. технике эти устройства еще не находят широкого применения, хотя они перспективны в тех случаях, когда требуется глубокое регулирование. [c.199]
Электромеханические механизмы перемещения электродов состоят из электродвигателя постоянного тока, самотормозящегося редуктора и передачи, преобразующей вращение выходного вала редуктора в воз-вратно-поступательное движение стоек или кареток. В прежних конструкциях эта передача осуществлялась с помощью троса, охватывав-щего выходной барабан редуктора. Один конец троса закреплялся при этом на каретке, а другой после обхода ряда роликов и барабана — на противовесе, который рассчитывался таким образом, чтобы он уравновещивал вес подвижной части без электрода. Обычно противовес в виде чугунных чушек помещают внутри пустотелых стоек или между стойками. [c.62]
Регулирование производительности центробежных компрессорор г приводом от электродвигателей постоянного тока или паровых гурбин достигается изменением частоты вращения вала двигателей. [c.121]
Схема экспериментальной установки СИТУВД для испытания торцевых уплотнений представлена на рис. 2.103. Установка смонтирована на горизонтальной плите. Уплотняемую среду в камеру уплотнения подают нафужающим устройством, состоящим из баллона (на рисунке не показан) со сжатым газом и цилиндра 4 с дифференциальным поршнем. Штоковое пространство цилиндра 4 и камеры уплотнения заполнены уплотняемой средой. Испытательная головка 11 соединена с дифференциальным цилиндром гибким шлангом 3. Электродвигатель постоянного тока мощностью 3 кВт через клиноременную передачу приводит во вращение вал 8, на каждом конце которого находится обойма с вращающимися уплотнительными кольцами 7. Крутящий момент от вала к вращающимся кольцам передается штифтами. Обойма 5 неподвижного кольца 6 выполнена в виде стакана с центральным отверстием ( / = 5 10 мм) для прохода жидкости в зазор пары фения уплотнения. Неподвижное уплотнительное кольцо поджимается к вращающемуся кольцу комплектом пружин сжатия. Вал установлен на шарикоподшипниках 9, вмонтированных в корпус подшипника 10, который закреплен на горизонтальной плите. Корпус испытываемой головки также установлен на шарикоподшипниках, что позволяет измерять момент фения с большой точностью. Давление среды в цилиндре измеряют маномефом 1. В установке [c.125]
Коэффициент полезного действия электродвигателя Г1э есть отношение получаемой механической мощности к затраченной электрической мощности двигателя. Значения т)э при различных нагрузках сообщаются поставщиком электродвигателя в виде диаграмм. Для точной работы нужно использовать электродвигатели постоянного тока. При малоыасштабных процессах вал мешалкн можно непосредственно соединять с валом электродвигателя и регулировать скорость вращения мешалки реостатом. [c.44]
Электродвигатель постоянного тока типа ПБСТ-22 питается от сети 220 В через стабилизатор напряжения (9) и выпрямительный, мост. Число оборотов двигателя регулируется ЛАТРом (10). Количество циклов отсчитывается счетчиком циклов (11). Образец после разрушения под действием груза (6) падает на микровыключатель (12) и отключает электродвигатель. [c.63]
Вращение вальца — от привода с бесступенчатым регулированием частоты вращения, который включает в себя электродвигатель постоянного тока с тиристорным управлением 2ПФ280МГУ4 с диапазоном регулирования 1 10(и = 750 об/мин(12,5 с» ),Л =45 кВт), редуктор ЦДНД-400 (г = 20) и открытую пару шестерен, применяемую для привода намазывающих валков ( 1=116, 2, =26,2 = 123), [c.777]
Полуавтомат СА-124 (рис. 3.4) состоит из сварочного пистолета и пульта управления, соединенных между собой электрическим кабелем. Присадочный материал разогревается до вязкотекучего состояния в нагревателе пистолета с помощью термоэлемента (проволочной спирали высокого омического сопротивления), помещенного в керамическую трубку. Концы термоэлемента снабжены вилкой штекерного разъема, а нагреватель выполнен сменным. При использовании комплекта сменных нагревателей с трубками нагрева различного диаметра появляется возможность получить пруток присадочного материала различной толщины, а следова-. тельно, и сварочные швы необходимого профиля (различных ширины и высоты). Нагреватель снабжен теплоизоляционным кожухом из асбеста и фторлона. В кожухе также крепятся механизм подачи прутка присадочного материала и электродвигатель постоянного тока. [c.98]
ООЛШ. При работе установки расходный и весовой бункера находятся йод давлением. Из расходного бункера топливо подается в первичную магистраль сдвоенным шнековым питателем, имеющим привод от электродвигателя постоянного тока с регулируемым числом оборотов. На стенке расходного бункера для улучшения равномерности подачи топлива установлен электрический вибратор. Топливо первичным воздухом вводится в горелку аксиальной камеры или в топливные сопла тангенциальной циклонной камеры. [c.87]
Электродвигатель постоянного тока позволяет плавно изменять скорость вращения планшайбы, что облегчает настройку манипулятора на нужную для наплавки и сварки скорость вращения детали. Габариты 8 000Х Х8000X5480 мм, масса 100 кг. [c.155]
Необходимость корректировки характеристик элементов схемы и правильной настройки ее наглядно иллюстрируется следующими результатами испытания Л. 24] типовой схемы на парогенераторе производительностью 61 кг/с (220 т/ч). Оборудование системы регулирования типовое. Пыль в горелки подается восемью пылепитателями УЛПП-1, приводимыми электродвигателями постоянного тока 4 на 220 В, типа ПН-85, мощностью по 0,9 кВт. Так как типовые магнитные станции рассчитаны на 6 электродвигателей, то на две группы по 4 электродвигателя установлены две станции с устройством, синхронизирующим перемещение траверс их контроллеров. Магазины имеют по 30 ступеней сопротивлений, присоединенных к 31 (включая нулевой ) контакту контроллеров. Набор сопротивлений в каждой цепи магазина, рассчитанный на напряжение питающего тока 220 В, следующий [c.72]
Целесообразным следует считать регулирование подачи топлива изменением скорости ленты электродвигателем с регулируемой частотой вращения. Такой метод регулирования обеспечивает более плавное и точное регулирование расхода угля и облегчает задачу синхронизации регулироваиия нескольких мельниц. Поскольку необходимым условием регулирования подачи топлива в мельницы в схеме прямого вдувания является поддержание равенства подач топлива в параллельно работающие мельницы, необходимо централизованное групповое регулирование переменных скоростей ПСУ, подобное )ассмотренному выше регулированию пылепитателей. 3 этом отличие условий регулирования ПСУ в схеме прямого вдувания от условий в схеме с пылевым бункером, где задача регулирования ограничивается стабилизацией постоянного режима максимальной производительности мельниц и где допустимо индивидуальное регулирование отдельных мельничных систем. Так же, как и при регулировании пылепитателей (см. 13), регулирование частоты вращения двигателей здесь может быть ступенчатым — с помощью магазина сопротивлений в цепи возбуждения электродвигателей постоянного тока, либо бесступенчатым — плавным изменением напряжения тока, питающего электродвигатели. В обоих случаях для синхронизации регулирования электродвигателей следует руководствоваться рекомендациями, изложенными применительно к регулированию пылепитателей. [c.83]
Проще всего вопрос решается в случае привода от электродвигателя постоянного тока. Но такие приводы при-, меняются очень редко. Хотя и существуют схемы, позволяющие изменять скорость вращения асинхронных электродвигателей, но они настолько громоздки, что практическое их использование маловероятно. В случае привода от асинхронного электродвигателя имеется возможность изменять скорость вращения гидромуфтой. Тогда между валом насоса и электродвигателя должна устанавливаться гидромуфта, позволяющая за счет скольжения уменьщать скорость вращения насоса при постоянной скорости двигателя. Это, конечно, приводит к определенному усложнению и удорожанию насосной установки. [c.383]
В Стерлитамакском филиале УГЬТГУ была разработана конструкция магнитного уловителя, основным элементом которого является якорь, вращающийся в корпусе определецной формы. Бьши рассмотрены якоря двух типов двухконечный и крестообразный. Корпус вьшолнен из листового, но ненамагничивающегося материала. Якорь выполнен из листовой электротехнической стали марки Э47 и заострен с концов Обмотка выполнена из медной проволоки диаметром 1 мм. Якорь приводится во вращение электродвигателем постоянного тока через клиноременную передачу. Углекислый барий с ферромагнитными примесями приходит в корпусе. При пропускании через обмотку электрического тока в якоре возникает магнитное поле, максимальный градиент которого находится на концах якоря. Ферромагнитные примеси, двигаясь с потоком углекислого бария, увлекаются под действием этого магнитного поля по направлению вращения ротора в отдельный бункер-приемник. [c.112]
Достаточно совершенным является способ регулирования подачи компрессорам путем изменения частоты вращения привода. При этом способе обеспечивается плавное изменение нодачи, он не требует изменения конструкции компрессора, КПД компрессорной установки практически не снижается. Но возможности применения описываемого способа довольно ограничены. Его можно использовать для установок с приводом от двигателя внутреннего сгорания, паровых или газовых турбин, а таклэлектродвигателя постоянного тока. При использовании наиболее распространенного привода от асиихропного трехфазного электродвигателя регулирование подачп изменением частоты вращения привода ие применяется. [c.259]
Установка состоит из следующих элементов входного коллектора цилиндрической камеры всасывания дросселирующего устройства в виде кольцевой диафрагмы для регулирования суммарных потерь в установке и режима работы вентилятора диффузора сеток для выравнивания потока в камере испытуемого вентилятора, снабженного для измерения подачи входным коллектором ЦАГИ и соединенного с баламснриым станком, состоящим нз электродвигателя постоянного тока, вал которого вращается в подшипниках, а статор не прикреплен, как обычно, к основанию, а может колебаться вокруг пала электродвигателя, при этом колебаниям его препятствует балансир, представляющий собой рычаг с чашкой весов и грузом (3. Для регулирования частоты вращения электродвигателя предназначен реостат. [c.309]
Двигатель постоянного тока. Характеристики и регулирование
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост 🙂
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим.
▌Конструктив и базовый принцип
Не буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам.
2. Якорь состоит из обмотки якоря и коллекторного узла.
Работает все очень и очень просто. Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится 🙂
Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол
▌Происходящие в двигателе процессы
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
▌Немного формул
Не буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то 🙂 Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу.
Самая главная формула коллекторного двигателя постоянного тока:
U = Е + Iя*Rя
- U — напряжение подаваемое на якорь
- Rя — сопротивление якорной цепи. Обычно за этот символ считают только сопротивление обмотки, хотя можно снаружи навесить резистор какой и он к ней приплюсуется. Тогда пишут как (Rя+Rд)
- Iя — ток в якорной цепи. Тот самый который замеряется амперметром при попытке измерять потребление движка 🙂
- Е — это противоэдс или ЭДС генератора, в генераторном режиме. Она зависит от конструкции двигателя, оборотов и описывается вот такой вот простой формулой
Е = Се * Ф * n
- Ce — одна из конструктивных констант. Они зависят от конструкции двигателя, числа полюсов, количества витков, толщин зазоров между якорем и статором. Нам она не особо нужна, при желании ее можно вычислить экспериментально. Главное, что она константа и на форму кривых не влияет 🙂
- Ф — поток возбуждения. Т.е. сила магнитного поля статора. В мелких моторчиках, где оно задается постоянным магнитом это тоже константа. Но бывает под возбуждение выведена отдельная обмотка и тогда мы можем ее менять.
- n — обороты якоря.
Ну и зависимость момента от тока и потока:
М = См * Iя * Ф
См — конструктивная констатнта.
Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором.
Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай.
А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя.
Если ее построить, то будет нечто следующее:
n0 — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант. А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи. Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой.
Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза.
Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока.
Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага 🙂 Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы. Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт.
В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту. Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило.
Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки. В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд.
Добавляя резисторы в якорную цепь мы можем увеличить наклон, т.е. чем больше грузим тем больше падает скорость.
Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо.
Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря. Но у них возникает одно интересное свойство. При пуске возникает большой пусковой ток и этот пусковой ток является же током возбуждения, обеспечивая огромный пусковой момент. Механическая характеристика напоминает гиперболу с максимумом в районе нулевых оборотов.
А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают.
▌Режимы работы двигателя постоянного тока
Направление вращения движка зависит от направления тока якоря или направления потока возбуждения. Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении. Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения.
Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это:
Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять. Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный. Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок).
Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя.
А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок.
Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания.
▌Бесколлекторные двигатели постоянного тока
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история.
Как работает двигатель постоянного тока принцип действия. От кольцевого якоря к барабанному. Общие сведения, устройство, сфера применения
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.Простой двигатель имеет 2 положения ротора (2 «мёртвые точки»), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
Электродвигатель постоянного тока был изобретен раньше других типов машин, преобразующих электрическую энергию в механическую. Несмотря на то, что позднее самое широкое распространение получили двигатели переменного тока, существуют сферы применения, в которых нет альтернативы электродвигателям постоянного тока.
Электродвигатель постоянного и переменного тока
История изобретения
Электродвигатель Якоби.
Для того чтобы понять принцип работы электрических двигателей постоянного тока (ДПТ) мы обратимся к истории его создания. Итак, первые опытные доказательства того, что электрическую энергию можно превращать в механическую, продемонстрировал Майкл Фарадей. В 1821 году он провел опыт с проводником, опущенным в сосуд, наполненный ртутью, на дне которого располагался постоянный магнит. После подачи электричества на проводник, тот начинал вращаться вокруг магнита, демонстрируя свою реакцию на имеющееся в сосуде магнитное поле. Эксперимент Фарадея не нашел практического применения, но доказал возможность создания электрических машин, и дал старт развитию электромеханики.
Первый электрический двигатель постоянного тока, в основу которого был положен принцип вращения подвижной части (ротора) был создан русским физиком-механиком Борисом Семеновичем Якоби в 1834 году. Это устройство работало следующим образом:
Описанный принцип использовался в двигателе, который Якоби установил на лодке с 12 пассажирами в 1839 году. Судно двигалось рывками со скоростью в 3 км/ч против течения (по другим данным — 4.5 км/ч), но успешно пересекло реку и высадило пассажиров на берег. В качестве источника питания использовалась батарея с 320 гальваническими элементами, а движение осуществлялось с помощью лопастных колес.
Дальнейшее изучение вопроса привело исследователей к разрешению массы вопросов, касаемо того, какие источники питания лучше использовать, как улучшить его рабочие характеристики и оптимизировать габариты.
В 1886 году Фрэнком Джулиан Спрэгом впервые был сконструирован электродвигатель постоянного тока, близкий по конструкции тем, которые применяются в наши дни. В нем был реализован принцип самовозбуждения и принцип обратимости электрической машины. К этому моменту все двигатели данного типа перешли на питание от более подходящего источника – генератора постоянного тока.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепи ротора с цепями, расположенными в неподвижной части машины
Устройство и принцип работы
В современных ДПТ используется все тот же принцип взаимодействия заряженного проводника с магнитным полем. С усовершенствованием технологий устройство лишь дополняется некоторыми элементами, улучшающими производительность. К примеру, в наши дни постоянные магниты используются лишь в двигателях низкой мощности, поскольку в крупных аппаратах они занимали бы слишком много места.
Основной принцип
Первоначальные прототипы двигателей данного типа были заметно проще современных аппаратов. Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя:
- Подача питания создает на обмотках якоря электромагнитное поле.
- Полюса электромагнитного поля отталкиваются от одноименных полюсов поля постоянного магнита.
- Якорь вместе с валом, на котором он закреплен, вращается в соответствии с отталкивающимся полем обмотки.
Данный алгоритм отлично работал в теории, однако на практике перед создателями первых двигателей вставали характерные проблемы, препятствовавшие функционированию машины:
- Мертвое положение, из которого двигатель невозможно запустить – когда полюса точно сориентированы друг перед другом.
- Невозможность пуска из-за сильного сопротивления или слабого отталкивания полюсов.
- Ротор останавливается после совершения одного оборота. Это связано с тем, что после прохождения половины окружности притягивание магнита не разгоняло, а тормозило вращение ротора.
Решение первой проблемы было найдено довольно быстро – для этого было предложено использовать более двух магнитов. Позднее в устройство двигателя стали включать несколько обмоток и коллекторно-щеточный узел, который подавал питание только на одну пару обмоток в определенный момент времени.
Коллекторно-щеточная система подачи тока решает и проблему торможения ротора – переключение полярности происходит до того момента, когда вращение ротора начинает замедляться. Это значит, что во время одного оборота двигателя происходит как минимум два переключения полярности.
Проблема слабых пусковых токов рассматривается ниже в отдельном разделе.
Конструкция
Итак, постоянный магнит закрепляется на корпусе двигателя, образуя вместе с ним статор, внутри которого располагается ротор. После подачи питания на обмотке якоря возникает электромагнитное поле, вступающее во взаимодействие с магнитным полем статора, это приводит к вращению ротора, жестко посаженного на вал. Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из:
- Коллектора. Он представляет собой токосъемное кольцо из нескольких секций, разделенных диэлектрическим материалом, подключается к обмоткам якоря и крепится непосредственно на валу двигателя.
- Графитовых щеток. Они замыкают цепь между коллектором и источником питания с помощью щеток, которые прижимаются к контактным площадкам коллектора прижимными пружинами.
Обмотки якоря одними концами соединяются между собой, а другими – с секциями коллектора, образуя таким образом цепь, по которой ток идет по следующему маршруту: входная щетка –> обмотка ротора -> выходная щетка.
Приведенная принципиальная схема (рис. 3) демонстрирует принцип работы примитивного электродвигателя постоянного тока с коллектором из двух секций:
- В этом примере мы будет считать стартовым положением ротора то, которое нарисовано на схеме. Итак, после подачи питания на нижнюю щетку, помеченную знаком «+», ток протекает по обмотке и создает вокруг нее электромагнитное поле.
- По правилу буравчика в левой нижней части формируется северный полюс якоря, а на правой верхней – южный. Располагаясь вблизи одноименных полюсов статора, они начинают отталкиваться, приводя тем самым ротор в движение, которое продолжается до тех пор, пока противоположные полюса не окажутся на минимальном друг от друга расстоянии, то есть придут в окончательное положение (рис. 1).
- Конструкция коллектора на данном этапе приведет к переключению полярности на обмотках якоря. В результате этого полюса магнитных полей снова окажутся на близком расстоянии и начнут отталкиваться.
- Ротор совершает полный оборот, и коллектор снова меняет полярность, продолжая его движение.
Детали электродвигателя постоянного тока
Здесь, как уже было отмечено, продемонстрирован принцип работы примитивного прототипа. В настоящих двигателях используется более двух магнитов, а коллектор состоит из большего числа контактных площадок, благодаря чему обеспечивается плавное вращение.
В высокомощных двигателях использование постоянных магнитов не представляется возможным из-за их большого размера. Альтернативой для них служит система из нескольких токопроводящих стержней, на каждой из которых имеется своя обмотка, подключаемая к питающим шинам. Одноименные полюса включаются в сеть последовательно. На корпусе может присутствовать от 1 до 4 пар полюсов, а их количеству должно соответствовать число токосъемных щеток на коллекторе.
Электродвигатели, рассчитанные на большую мощность, обладают рядом функциональных преимуществ перед более «легкими» аналогами. К примеру, здешнее устройство токосъемных щеток поворачивает их на определенный угол относительно вала для компенсации торможения вала, названного «реакцией якоря».
Пусковые токи
Постепенное оснащение ротора двигателя дополнительными элементами, обеспечивающими его бесперебойную работу и исключающими секторальное торможение, возникает проблема его запуска. Но все это увеличивает вес ротора – с учетом сопротивления вала столкнуть его с места становится сложнее. Первым решением этой проблемы, приходящим в голову, может быть увеличение силы тока, подаваемой на старте, но это может привести к неприятным последствиям:
- защитный автомат линии не выдержит тока и отключится;
- провода обмотки сгорят от перегрузки;
- секторы переключения на коллекторе приварятся от перегрева.
Поэтому такое решение можно назвать скорее рискованной полумерой.
Вообще, данная проблема является главным недостатком электродвигателей постоянного тока, но включает в себя основное их преимущество, благодаря которому они незаменимы в некоторых областях. Преимущество это заключается в прямой передаче момента вращения сразу же после пуска – вал (если тронется с места) будет крутиться с любой нагрузкой. Двигатели переменного тока на такое не способны.
Решить эту проблему полностью до сих пор не удалось. На сегодняшний день для пуска таких двигателей используется автомат-стартер, чей принцип работы схож с автомобильной коробкой передач:
- Сначала ток постепенно поднимается до пускового значения.
- После «сдвига» с места значение тока резко падает и снова плавно поднимается «подгоняя вращение вала».
- После подъема до предельного значения сила тока снова снижается и «подгоняется».
Данный цикл повторяется 3-5 раз (рис. 4) и решает необходимость старта двигателя без возникновения критических нагрузок в сети. Фактически, «плавный» запуск по-прежнему отсутствует, однако оборудование работает безопасно, а главное достоинство электродвигателя постоянного тока – крутящий момент – сохраняется.
Схемы подключения
Подключение ДПТ выполняется несколько сложнее, в сравнении с двигателями со спецификацией на переменный ток.
У двигателей высокой и средней мощности, как правило, есть специальные контакты обмотки возбуждения (ОВ) и якоря, вынесенные в клеммную коробку. Чаще всего на якорь подают выходное напряжение источника, а на ОВ – ток, отрегулированный, как правило, реостатом. Скорость вращения двигателя напрямую зависит от силы тока, поданного на обмотку возбуждения.
Есть три основные схемы включения якоря и обмотки возбуждения электродвигателей постоянного тока:
- Последовательное возбуждение используется в моторах, от которых требуется большая сила тока на старте (электрический транспорт, прокатное оборудование и т.п.). Данная схема предусматривает последовательное подключение ОВ и якоря к источнику. После подачи напряжения по обмоткам якоря и ОВ проходят токи одинаковой величины.Следует учитывать, что снижение нагрузки на вал даже на четверть при последовательном возбуждении приведет к резкому повышению оборотов, что может привести к поломке двигателя, поэтому эта схема и используется в условиях постоянной нагрузки.
- Параллельное возбуждение применяется в моторах, обеспечивающих работу станкового, вентиляторного и прочего оборудования, которое в момент пуска не оказывает высокую нагрузку на вал. В этой схеме для возбуждения ОВ используется независимая обмотка, регулируемая, чаще всего, реостатом.
- Независимое возбуждение очень схоже с параллельным, но в данном случае для подачи питания ОВ используется независимый источник, что исключает появление электрической связи между якорем и обмоткой возбуждения.
В современных электрических двигателях постоянного тока могут применяться смешанные схемы, основанные на базе трех описанных.
Регулировка скорости вращения
Способ регулирования оборотов ДПТ зависит от схемы его подключения:
- В моторах с параллельным возбуждением снижение оборотов относительно номинала можно производить изменяя напряжение якоря, а повышение – ослабляя поток возбуждения. Для увеличения оборотов (не более чем в 4 раза относительно номинальной величины) в цепь ОВ добавляется реостат.
- При последовательном возбуждении регулировка легко осуществляется переменным сопротивлением в цепи якоря. Правда этот метод подходит только для снижения оборотов и лишь в соотношениях 1:3 или 1:2 (кроме того, это приводит к большим потерям в реостате). Повышение осуществляется с помощью регулировочного реостата в цепи ОВ.
Данные схемы редко применяются в современном высокотехнологичном оборудовании, поскольку обладают узким диапазоном регулировки и другими недостатками. В наши дни для этих целей все чаще создают электронные схемы управления.
Реверсирование
Для того чтобы реверсировать (обратить) вращение двигателя постоянного тока необходимо:
- при последовательном возбуждении – просто изменить полярность входных контактов;
- при смешанном и параллельном возбуждении – необходимо менять направление тока в обмотке якоря; разрыв ОВ может привести к критическому повышению нагнетаемой электродвижущей силы и пробою изоляции проводов.
Сфера применения
Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения. С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.
Самый простой щёточно-коллекторный узел
Достоинства и недостатки
Резюмируя все вышесказанное, можно описать характерные для электродвигателей постоянного тока достоинства и недостатки относительно их аналогов, рассчитанных на работу от переменного тока.
Основные достоинства:
- ДПТ незаменимы в ситуациях, когда необходим сильный пусковой момент;
- скорость вращения якоря легко регулируется;
- двигатель постоянного тока является универсальной электрической машиной, то есть может применяться в качестве генератора.
Главные недостатки:
- ДПТ имеют высокую производственную стоимость;
- использование щеточно-коллекторного узла приводит к необходимости частого техобслуживания и ремонта;
- для работы нужен источник постоянного тока или выпрямители.
Электродвигатели постоянного тока, безусловно, проигрывают своим «переменным» сородичам по стоимости и надежности, однако используются и будут использоваться, поскольку плюсы от их использования в определенных сферах категорические перечеркивают все минусы.
Электродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
Работа электрического двигателя постоянного тока основана на . Из основ электротехники известно, что на проводник с током, помещенный в , действует сила, определяемая по правилу левой руки:
F = BIL,
где I — ток, протекающий по проводнику, В — индукция магнитного поля; L — длина проводника.
При пересечении проводником магнитных силовых линий машины в нем наводится , которая по отношению к току в проводнике направлена против него, поэтому он а называется обратной или противодействующей (противо-э. д. с). Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря , разделенных воздушным зазором.
Индуктор электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах — специальная обмотка, служащая для улучшения условий коммутации.
Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов , рабочей обмотки, уложенной в пазы, и служащего для подвода к рабочей обмотке постоянного тока .
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях , которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусом электродвигателя .
Коммутация в электродвигателях постоянного тока
В процессе работы электродвигателя постоянного тока щетки, скользя по поверхности вращающегося коллектора, последовательно переходят с одной коллекторной пластины на другую. При этом происходит переключение параллельных секций обмотки якоря и изменение тока в них. Изменение тока происходит в то время, когда виток обмотки замкнут щеткой накоротко. Этот процесс переключения и явления, связанные с ним, называются коммутацией .
В момент коммутации в короткозамкнутой секции обмотки под влиянием собственного магнитного поля наводится э. д. с. самоиндукции. Результирующая э. д. с. вызывает в короткозамкнутой секции дополнительный ток, который создает неравномерное распределение плотности тока на контактной поверхности щеток. Это обстоятельство считается основной причиной искрения коллектора под щеткой. Качество коммутации оценивается по степени искрения под сбегающим краем щетки и определяется по шкале степеней искрения.
Способы возбуждения электродвигателей постоянного тока
Под возбуждением электрических машин понимают создание в них магнитного поля, необходимого для работы электродвигателя . Схемы возбуждения электродвигателей постоянного тока показаны на рисунке .
По способу возбуждения электрические двигатели постоянного тока делят на четыре группы:
1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока.
2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря.
3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой.
4. Двигатели со смешаным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Типы двигателей постоянного тока
Двигатели постоянного тока прежде всего различаются по характеру возбуждения. Двигатели могут быть независимого, последовательного и смешанного возбуждения. Параллельное возбуждение можно не рассматривать. Даже если обмотка возбуждения подключается к той же сети, от которой питается цепь якоря, то и в этом случае ток возбуждения не зависит от тока якоря, так как питающую сеть можно рассматривать как сеть бесконечной мощности, а ее напряжение постоянным.
Обмотку возбуждения всегда подключают непосредственно к сети, и поэтому введение добавочного сопротивления в цепь якоря не оказывает влияния на режим возбуждения. Той специфики, которая существует , здесь быть не может.
В двигателях постоянного тока малой мощности часто используют магнитоэлектрическое возбуждение от постоянных магнитов. При этом существенно упрощается схема включения двигателя, уменьшается расход меди. Следует однако иметь в виду, что, хотя обмотка возбуждения исключается, габариты и масса магнитной системы не ниже, чем при электромагнитном возбуждении машины.
Свойства двигателей в значительной мере определяются их системой возбуждения.
Чем больше габариты двигателя, тем, естественно, больше развиваемый им момент и соответственно мощность. Поэтому при большей скорости вращения и тех же габаритах можно получить большую мощность двигателя. В связи с этим, как правило, двигатели постоянного тока, особенно малой мощности, проектируются на большую частоту вращения — 1000-6000 об/мин.
Следует, однако, иметь в виду, что скорость вращения рабочих органов производственных машин существенно ниже. Поэтому между двигателем и рабочей машиной приходится устанавливать редуктор. Чем больше скорость двигателя, тем более сложным и дорогим получается редуктор. В установках большой мощности, где редуктор представляет собой дорогостоящий узел, двигатели проектируются на существенно меньшие скорости.
Следует еще иметь в виду, что механический редуктор всегда вносит значительную погрешность. Поэтому в прецизионных установках желательно использовать тихоходные двигатели, которые можно было бы сочленить с рабочими органами либо напрямую, либо посредством простейшей передачи. В связи с этим появились так называемые высокомоментные двигатели на низкие скорости вращения. Эти двигатели нашли широкое применение в металлорежущих станках, где сочленяются с органами перемещения без каких-либо промежуточных звеньев посредством шарико-винтовых передач.
Электрические двигатели отличаются также по конструктивным при знакам, связанным с условиями их работы. Для нормальных условий используются так называемые открытые и защищенные двигатели, охлаждаемые воздухом помещения, в котором они устанавливаются.
Воздух продувается через каналы машины посредством вентилятора, размещенного на валу двигателя. В агрессивных средах используются закрытые двигатели, охлаждение которых осуществляется за счет внешней ребристой поверхности или наружного обдува. Наконец, выпускаются специальные двигатели для взрывоопасной среды.
Специфические требования к конструктивным формам двигателя предъявляются при необходимости обеспечения высокого быстродействия — быстрого протекания процессов разгона, торможения. В этом случае двигатель должен иметь специальную геометрию — малый диаметр якоря при большой его длине.
Для уменьшения индуктивности обмотки ее укладывают не в пазы, а на поверхность гладкого якоря. Крепится обмотка клеющими составами типа эпоксидной смолы. При малой индуктивности обмотки существенно улучшаются условия коммутации на коллекторе, отпадает необходимость в дополнительных полюсах, может быть использован коллектор меньших размеров. Последнее дополнительно уменьшает момент инерции якоря двигателя.
Еще большие возможности для снижения механической инерции дает использование полого якоря, представляющего собой цилиндр из изоляционного материала. На поверхности этого цилиндра располагается обмотка, изготовляемая печатным способом, штамповкой или из про волоки по шаблону на специальном станке. Крепление обмотки осуществляется клеющими материалами.
Внутри вращающегося цилиндра располагается стальной сердечник, необходимый для создания путей прохождения магнитного потока. В двигателях с гладким и полым якорями вследствие увеличения зазоров в магнитной цепи, обусловленного внесением в них обмотки и изоляционных материалов, требуемая намагничивающая сила для проведения необходимого магнитного потока существенно возрастает. Соответственно магнитная система получается более развитой.
К числу малоинерционных двигателей относятся также двигатели с дисковыми якорями. Диски, на которые наносятся или наклеиваются обмотки, изготовляются из тонкого изоляционного материала, не подверженного короблению, например из стекла. Магнитная система при двухполюсном исполнении представляет собой две скобы, на одной из которых размещены обмотки возбуждения. В связи с малой индуктивностью обмотки якоря машина, как правило, не имеет коллектора и съем тока осуществляется щетками непосредственно с обмотки.
Следует еще упомянуть о линейном двигателе, обеспечивающем не
вращательное движение, а поступательное. Он представляет собой двигатель,
магнитная система которого как бы развернута и полюсы устанавливаются на линии движения якоря и соответствующего рабочего
органа машины. Якорь обычно выполняется как малоинерционный.
Габариты и стоимость двигателя велики, так как необходимо значительное число полюсов для обеспечения перемещения на заданном отрезке пути.
Пуск двигателей постоянного тока
В начальный момент пуска двигателя якорь неподвижен и противо-э. д. с. и напряжение в якоре равна нулю, поэтому Iп = U / Rя.
Сопротивление цепи якоря невелико, поэтому пусковой ток превышает в 10 — 20 раз и более номинальный. Это может вызвать значительные в обмотке якоря и чрезмерный ее перегрев, поэтому пуск двигателя производят с помощью — активных сопротивлений, включаемых в цепь якоря.
Двигатели мощностью до 1 кВт допускают прямой пуск.
Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи. Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Регулирование частоты вращения электродвигателя постоянного тока
Частота вращения двигателя постоянного тока:
где U — напряжение питающей сети; Iя — ток якоря; R я — сопротивление цепн якоря; kc — коэффициент, характеризующий магнитную систему; Ф — магнитный поток электродвигателя.
Из формулы видно, что частоту вращения электродвигателя постоянного тока можно регулировать тремя путями: изменением потока возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря.
Наиболее широкое применение получили первые два способа регулирования, третий способ применяют редко: он неэкономичен, скорость двигателя при этом значительно зависит от колебаний нагрузки. Механические характеристики, которые при этом получаются, показаны на рисунке .
Жирная прямая — это естественная зависимость скорости от момента на валу, или , что то же, от тока якоря. Прямая естественной механической характеристики несколько отклоняется от горизонтальном штриховой линии. Это отклонение называют нестабильностью, нежесткостью, иногда статизмом. Группа непаралельных прямых I соответствует регулированию скорости возбуждением, параллельные прямые II получаются в результате изменения напряжения якоря, наконец, веер III — это результат введения в цепь якоря активного сопротивления.
Величину тока возбуждения двигателя постоянного тока можно регулировать с помощью реостата или любого устройства, активное сопротивление которого можно изменять по величине, например транзистора. При увеличении сопротивления в цепи ток возбуждения уменьшается, частота вращения двигателя увеличивается. При ослаблении магнитного потока механические характеристики располагаются выше естественной (т. е. выше характеристики при отсутствии реостата). Повышение частоты вращения двигателя вызывает усиление искрения под щетками. Кроме того, при работе электродвигателя с ослабленным потоком уменьшается устойчивость его работы, особенно при переменных нагрузках на валу. Поэтому пределы регулирования скорости таким способом не превышают 1,25 — 1,3 от номинальной.
Регулирование изменением напряжения требует источника постоянного тока, например генератора или преобразователя. Такое регулирование используют во всех промышленных системах электропривода: генератор — д вигатель постоянного тока (Г — ДПТ), электромашинный усилитель — двигатель постоянного тока (ЭМУ — ДПТ), магнитный усилитель — двигатель постоянного тока (МУ — ДПТ), — двигатель постоянного тока (Т — ДПТ).
Торможение электродвигателей постоянного тока
В электроприводах с электродвигателями постоянного тока применяют три способа торможения: динамическое, рекуперативное и торможение противовключением.
Динамическое торможение осуществляется путем замыкания обмотки якоря двигателя накоротко или через . При этом электродвигатель постоянного тока начинает работать как генератор, преобразуя запасенную им механическую энергию в электрическую. Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точный останов электродвигателя.
Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Рекуперативное торможение двигателя постоянного тока является наиболее экономичным способом, так как в этом случае происходит возврат в сеть электроэнергии. В электроприводе металлорежущих станков этот способ применяют при регулировании скорости в системах Г — ДПТ и ЭМУ — ДПТ.
Торможение противовключением электродвигателя постоянного тока осуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращения электродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.
Состоит из вращающихся нагнетательных элементов, помещенных на статически закрепленную станину. Подобные устройства широко востребованы в технических областях, где требуется повышение диапазона регулировки скоростей, поддержание стабильного вращения привода.
Конструкция
Конструктивно электродвигатель постоянного тока состоит из ротора (якоря), индуктора, коллектора и щеток. Давайте рассмотрим, что представляет собой каждый элемент системы:
- Ротор состоит из множества катушек, что покрыты проводящей ток обмоткой. Некоторые электродвигатели постоянного тока 12 вольт содержат до 10 и более катушек.
- Индуктор — неподвижная часть агрегата. Состоит из магнитных полюсов и станины.
- Коллектор — функциональный элемент двигателя в виде цилиндра, размещенного на валу. Содержит изоляцию в виде медных пластин, а также выступы, которые находятся в скользящем контакте с щетками двигателя.
- Щетки — неподвижно закрепленные контакты. Предназначены для подводки электрического тока к ротору. Чаще всего электродвигатель постоянного тока оснащается графитовыми и медно-графитовыми щетками. Вращение вала приводит к замыканию и размыканию контактов между щетками и ротором, что вызывает искрение.
Работа электродвигателя постоянного тока
Механизмы данной категории содержат специальную обмотку возбуждения на индукторной части, куда поступает постоянный ток, что в последующем преобразуется в магнитное поле.
Обмотка ротора поддается воздействию потока электроэнергии. Со стороны магнитного поля на данный конструктивный элемент оказывает влияние сила Ампера. В результате образуется крутящий момент, что проворачивает роторную часть на 90 о. Продолжается вращение рабочих валов двигателя за счет образования эффекта коммутации на щеточно-коллекторном узле.
При поступлении электрического тока на ротор, который находится под воздействием магнитного поля индуктора, электродвигатели постоянного тока (12 вольт) создают момент силы, что приводит к выработке энергии в процессе вращения валов. Механическая энергия передается от ротора к прочим элементам системы посредством ременной передачи.
Типы
В настоящее время выделяют несколько категорий электродвигателей постоянного тока:
- С независимым возбуждением — питание обмотки происходит от независимого источника энергии.
- С последовательным возбуждением — обмотка якоря включена последовательно с обмоткой возбуждения.
- С параллельным возбуждением — обмотка ротора включена в электрическую цепь параллельно источнику питания.
- Со смешанным возбуждением — двигатель содержит несколько обмоток: последовательную и параллельную.
Управление электродвигателем постоянного тока
Пуск двигателя осуществляется за счет работы специальных реостатов, которые создают активное сопротивление, включаемое в цепь ротора. Для обеспечения плавного запуска механизма реостат обладает ступенчатой структурой.
Для старта реостата задействуется все его сопротивление. По мере роста скорости вращения возникает противодействие, что накладывает ограничение на рост силы пусковых токов. Постепенно ступень за ступенью увеличивается подводимое к ротору напряжение.
Электродвигатель постоянного тока позволяет регулировать скорость вращения рабочих валов, что осуществляется следующим образом:
- Показатель скорости ниже номинальной корректируется изменением напряжения на роторе агрегата. При этом крутящий момент остается стабильным.
- Темп работы выше номинального регулируется током, который возникает на обмотке возбуждения. Значение крутящего момента снижается при поддержании постоянной мощности.
- Управление роторным элементом осуществляется при помощи специализированных тиристорных преобразователей, которые представляют собой приводы постоянного тока.
Преимущества и недостатки
Сравнивая электродвигатели постоянного тока с агрегатами, функционирующими на переменном токе, стоит отметить их повышенную производительность и увеличенный коэффициент полезного действия.
Оборудование данной категории отлично справляется с отрицательным воздействием факторов окружающей среды. Способствует этому наличие полностью закрытого корпуса. Конструкция электродвигателей постоянного тока предусматривает наличие уплотнений, что исключают проникновение влаги в систему.
Защита в виде надежных изоляционных материалов дает возможность задействовать максимальный ресурс агрегатов. Допускается применение подобного оборудования при температурных условиях в пределах от -50 до +50 о С и относительной влажности воздуха порядка 98 %. Запуск механизма возможен после периода длительного простоя.
Среди недостатков электрических двигателей постоянного тока на первое место выходит достаточно быстрый износ щеточных узлов, что требует соответствующих расходов на обслуживание. Сюда же относится крайне ограниченный срок службы коллектора.
Создающая магнитный поток для образования момента. Идуктор обязательно включает либо постоянные магниты либо обмотку возбуждения . Индуктор может быть частью как ротора так и статора. В двигателе, изображенном на рис. 1, система возбуждения состоит из двух постоянных магнитов и входит в состав статора.
Типы коллекторных электродвигателей
По конструкции статора коллекторный двигатель может быть и .
Схема коллекторного двигателя с постоянными магнитами
Коллекторный двигатель постоянного тока (КДПТ) с постоянными магнитами является наиболее распространенным среди КДПТ. этого двигателя включает постоянные магниты, которые создают магнитное поле статора. Коллекторные двигатели постоянного тока с постоянными магнитами (КДПТ ПМ) обычно используются в задачах не требующих больших мощностей. КДПТ ПМ дешевле в производстве, чем коллекторные двигатели с обмотками возбуждения. При этом момент КДПТ ПМ ограничен полем постоянных магнитов статора. КДПТ с постоянными магнитами очень быстро реагирует на изменение напряжения. Благодаря постоянному полю статора легко управлять скоростью двигателя. Недостатком электродвигателя постоянного тока с постоянными магнитами является то, что со временем магниты теряют свои магнитные свойства, в результате чего уменьшается поле статора и снижаются характеристики двигателя.
- Преимущества:
- лучшее соотношение цена/качество
- высокий момент на низких оборотах
- быстрый отклик на изменение напряжения
- Недостатки:
- постоянные магниты со временем, а также под воздействием высоких температур теряют свои магнитные свойства
Коллекторный двигатель с обмотками возбуждения
- По схеме подключения обмотки статора коллекторные электродвигатели с обмотками возбуждения разделяют на двигатели:
Схема независимого возбуждения
Схема параллельного возбуждения
Схема последовательного возбуждения
Схема смешанного возбуждения
Двигатели независимого и параллельного возбуждения
В электродвигателях независимого возбуждения обмотка возбуждения электрически не связана с обмоткой (рисунок выше). Обычно напряжение возбуждения U ОВ отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря. Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы .
В двигателях параллельного возбуждения токи обмотки возбуждения (индуктора) и якоря не зависят друг от друга, а полный ток двигателя равен сумме тока обмотки возбуждения и тока якоря. Во время нормальной работы, при увеличении напряжения питания увеличивается полный ток двигателя, что приводит к увеличению полей статора и ротора. С увеличением полного тока двигателя скорость так же увеличивается, а момент уменьшается. При нагружении двигателя ток якоря увеличивается, в результате чего увеличивается поле якоря. При увеличении тока якоря, ток индуктора (обмотки возбуждения) уменьшается, в результате чего уменьшается поле индуктора, что приводит к уменьшению скорости двигателя, и увеличению момента.
- Преимущества:
- практически постоянный момент на низких оборотах
- хорошие регулировочные свойства
- отсутствие потерь магнетизма со временем (так как нет постоянных магнитов)
- Недостатки:
- дороже КДПТ ПМ
- двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный электродвигатель параллельного возбуждения имеет с уменьшающимся моментом на высоких оборотах и высоким, но более постоянным моментом на низких оборотах. Ток в обмотке индуктора и якоря не зависит друг от друга, таким образом, общий ток электродвигателя равен сумме токов индуктора и якоря. Как результат данный тип двигателей имеет отличную характеристику управления скоростью. Коллекторный двигатель постоянного тока с параллельной обмоткой возбуждения обычно используется в приложениях, которые требуют мощность больше 3 кВт, в частности в автомобильных приложениях и промышленности. В сравнении с , двигатель параллельного возбуждения не теряет магнитные свойства со временем и является более надежным. Недостатками двигателя параллельного возбуждения являются более высокая себестоимость и возможность выхода двигателя из под контроля, в случае если ток индуктора снизится до нуля, что в свою очередь может привести к поломке двигателя .
В электродвигателях последовательного возбуждения обмотка возбуждения включена последовательно с обмоткой якоря, при этом ток возбуждения равен току якоря (I в = I а), что придает двигателям особые свойства. При небольших нагрузках, когда ток якоря меньше номинального тока (I а < I ном) и магнитная система двигателя не насыщена (Ф ~ I а), электромагнитный момент пропорционален квадрату тока в обмотке якоря:
- где M – , Н∙м,
- с М – постоянный коэффициент, определяемый конструктивными параметрами двигателя,
- Ф – основной магнитный поток, Вб,
- I a – ток якоря, А.
С ростом нагрузки магнитная система двигателя насыщается и пропорциональность между током I а и магнитным потоком Ф нарушается. При значительном насыщении магнитный поток Ф с ростом I а практически не увеличивается. График зависимости M=f(I a) в начальной части (когда магнитная система не насыщена) имеет форму параболы, затем при насыщении отклоняется от параболы и в области больших нагрузок переходит в прямую линию .
Важно: Недопустимо включать двигатели последовательного возбуждения в сеть в режиме холостого хода (без нагрузки на валу) или с нагрузкой менее 25% от номинальной, так как при малых нагрузках частота вращения якоря резко возрастает, достигая значений, при которых возможно механическое разрушение двигателя, поэтому в приводах с двигателями последовательного возбуждения недопустимо применять ременную передачу, при обрыве которой двигатель переходит в режим холостого хода. Исключение составляют двигатели последовательного возбуждения мощностью до 100-200 Вт, которые могут работать в режиме холостого хода, так как их мощность механических и магнитных потерь при больших частотах вращения соизмерима с номинальной мощностью двигателя.
Способность двигателей последовательного возбуждения развивать большой электромагнитный момент обеспечивает им хорошие пусковые свойства.
Коллекторный двигатель последовательного возбуждения имеет высокий момент на низких оборотах и развивает высокую скорость при отсутствии нагрузки. Данный электромотор идеально подходит для устройств, которым требуется развивать высокий момент (краны и лебедки), так как ток и статора и ротора увеличивается под нагрузкой. В отличии от и двигателей параллельного возбуждения двигатель последовательного возбуждения не имеет точной характеристики контроля скорости, а в случае короткого замыкания обмотки возбуждения он может стать не управляемым.
Двигатель смешанного возбуждения имеет две обмотки возбуждения, одна из них включена параллельно обмотке якоря, а вторая последовательно. Соотношение между намагничивающими силами обмоток может быть различным, но обычно одна из обмоток создает большую намагничивающую силу и эта обмотка называется основной, вторая обмотка называется вспомогательной. Обмотки возбуждения могут быть включены согласовано и встречно, и соответственно магнитный поток создается суммой или разностью намагничивающих сил обмоток. Если обмотки включены согласно, то характеристики скорости такого двигателя располагаются между характеристиками скорости двигателей параллельного и последовательного возбуждения. Встречное включение обмоток применяется, когда необходимо получить неизменную скорость вращения или увеличение скорости вращения с увеличением нагрузки. Таким образом, рабочие характеристики двигателя смешанного возбуждения приближаются к характеристикам двигателя параллельного или последовательного возбуждения, смотря по тому, какая из обмоток возбуждения играет главную роль
Что делает электрическое соединение между источником питания и коммутатором в двигателе постоянного тока? — Mvorganizing.org
Что делает электрическое соединение между источником питания и коммутатором в двигателе постоянного тока?
Две или более неподвижные щетки подключаются к внешней цепи, либо к источнику тока для двигателя, либо к нагрузке для генератора. Сегменты коммутатора подключены к катушкам якоря, причем количество катушек (и сегментов коммутатора) зависит от скорости и напряжения машины.
Для чего нужен коммутатор?
В двигателях постоянного тока и большинстве двигателей переменного тока назначение коммутатора состоит в том, чтобы гарантировать, что ток, протекающий через обмотки ротора, всегда имеет одно и то же направление, и что соответствующая катушка на роторе находится под напряжением по отношению к катушкам возбуждения.
Каковы причины искрения на коммутаторе?
Вибрация самой машины может вызвать искрение щеток и, в конечном итоге, привести к повреждению коллектора. Такая вибрация может быть вызвана дисбалансом якоря, плохим фундаментом или другими механическими неисправностями.Это также может быть результатом дефектных подшипников.
Какая клемма коммутатора подключена к положительной клемме источника питания?
зажимы якоря
Какие приложения требуют высокого пускового момента?
Применяется в автомобилях, подъемниках, подъемниках и кранах, поскольку имеет высокий пусковой крутящий момент. Шунтирующая обмотка — этот тип имеет один источник напряжения, а обмотка возбуждения подключена параллельно обмотке ротора и может обеспечивать повышенный крутящий момент без снижения скорости за счет увеличения тока двигателя.
Какой тип следующих двигателей наиболее эффективен?
ДвигателиBLDC обычно имеют КПД 85–90% или более. Сообщается о КПД двигателя BLDC до 96,5%, тогда как электродвигатели постоянного тока с щеткой обычно имеют КПД 75–80%.
Какой тип нагрузки требует большого крутящего момента при пуске?
Что касается пуска двигателя, то высокоинерционная нагрузка — это нагрузка, которая требует относительно длительного периода ускорения, прежде чем двигатель достигнет нормальной рабочей скорости.В зависимости от приложения этот период ускорения часто может превышать две минуты.
Какой двигатель постоянного тока используется для конвейера?
Основываясь на приведенных выше ответах, лучшим выбором для этого применения будет бесщеточный двигатель постоянного тока / мотор-редуктор с регулятором скорости переменного тока или трехфазный двигатель / мотор-редуктор с регулятором скорости переменного тока.
Что контролирует скорость двигателя постоянного тока?
Таким образом, скорость двигателя постоянного тока можно регулировать тремя способами: изменяя магнитный поток и изменяя ток через обмотку возбуждения.Изменяя напряжение якоря и сопротивление якоря. Через напряжение питания.
Какой двигатель лучше всего подходит для переменного или постоянного тока?
Какой двигатель более мощный: переменного или постоянного тока? Двигатели переменного тока обычно считаются более мощными, чем двигатели постоянного тока, поскольку они могут создавать более высокий крутящий момент за счет использования более мощного тока. Однако двигатели постоянного тока обычно более эффективны и лучше используют входную энергию.
Где используются двигатели постоянного тока?
Малые двигатели постоянного тока используются в инструментах, игрушках и приборах.Универсальный двигатель может работать от постоянного тока, но это легкий щеточный двигатель, используемый для портативных электроинструментов и бытовой техники. В настоящее время более крупные двигатели постоянного тока используются в приводах электромобилей, лифтов и подъемников, а также в приводах сталепрокатных станов.
Какова функция арматуры?
В якоре электродвижущая сила создается за счет относительного движения якоря и поля. Когда машина или двигатель используются в качестве двигателя, эта ЭДС противодействует току якоря, и якорь преобразует электрическую мощность в механическую энергию в форме крутящего момента и передает ее через вал.
Что такое серийный двигатель постоянного тока?
Двигатели постоянного тока сериипредставляют собой группу двигателей постоянного тока с самовозбуждением, в которых катушка возбуждения подключена последовательно к обмотке якоря и, таким образом, через нее проходит более высокий ток. Миссия серийного двигателя постоянного тока состоит в том, чтобы превратить электрическую энергию в механическую на основе электромагнитного закона.
Какие две основные части двигателя постоянного тока?
Двигатели постоянного токасостоят из двух основных компонентов: статора и якоря. Статор — это неподвижная часть двигателя, а якорь вращается.В двигателе постоянного тока статор создает вращающееся магнитное поле, которое приводит во вращение якорь.
Какая скорость двигателя постоянного тока?
Регуляторыпостоянного тока регулируют скорость, изменяя напряжение, подаваемое на двигатель (это отличается от средств управления двигателем переменного тока, которые регулируют сетевую частоту двигателя). Типичные скорости холостого хода или синхронные скорости для двигателя переменного тока с дробной мощностью 1800 или 3600 об / мин и от 1000 до 5000 об / мин для двигателей постоянного тока с дробной мощностью.
Все о серийных двигателях постоянного тока — что это такое и как они работают
Невозможно представить мир без электродвигателя.
Все, что используется в повседневной жизни — автомобиль, бытовая техника, даже розетки, которые обеспечивают постоянное электричество, — не было бы здесь, если бы не эти очень полезные машины. Благодаря достижениям 19-го века и более поздних времен мы можем преобразовывать электрический ток в полезный механический механизм для выполнения всевозможных удивительных задач. В этой статье речь пойдет о двигателе постоянного тока, одной из старейших форм электродвигателей, и о том, какую пользу он приносит нам по сей день. Мы специально исследуем двигатель постоянного тока с последовательной обмоткой (часто называемый «последовательным двигателем постоянного тока»), который почти во всех аспектах похож на другие типы двигателей постоянного тока, но имеет некоторые важные уникальные свойства.Эта статья призвана помочь читателям понять, как работает двигатель постоянного тока с серийной обмоткой, как он работает и для каких областей применения выгодна эта прочная конструкция электродвигателя.
Что такое двигатели постоянного тока с последовательной обмоткой и как они работают?
В большинстве случаев серийные двигатели постоянного тока идентичны другим типам щеточных двигателей постоянного тока по конструкции и работе. Он состоит из двух жизненно важных компонентов, статора и ротора, которые электрически и магнитно взаимодействуют, создавая вращательное движение на выходном валу.Базовая конструкция двигателей постоянного тока относительно проста, а упрощенная принципиальная схема показана на рисунке 1:
.Рисунок 1: Принципиальная электрическая схема двигателей постоянного тока. Эта диаграмма намеренно нечеткая относительно того, где находится поле статора по отношению к якорю; его расположение и источник питания — главное отличие некоторых двигателей постоянного тока.
Как показано, поле статора действует на весь узел ротора, создавая постоянное магнитное поле; это поле может быть создано с помощью постоянного магнита или электромагнита, сделанного из проволочной обмотки (известной как «обмотка возбуждения», как показано на Рисунке 1).Источник питания постоянного тока подключен к щеткам, которые зажимают ротор, который представляет собой вращающийся узел, содержащий якорь, обмотки якоря, коллекторные кольца и выходной вал. Якорь состоит из металлических пластин, в которых размещена обмотка якоря вокруг выходного вала. Это непрерывная катушка из проводящего провода, которая пропущена через пластинки якоря и оканчивается кольцами коммутатора.
Якорь, когда приводится в действие зажимом щеток на кольцах коммутатора, действует как электромагнит и создает собственное магнитное поле так же, как и обмотка возбуждения.Когда оператор включает источник постоянного тока, ток проходит через щетки, через кольца коммутатора и в катушки якоря, где поле якоря начинает противодействовать постоянному магнитному полю статора. Затем ротор магнитно «отталкивается» от поля статора, но, поскольку он может вращаться только на месте, он вызывает полезную механическую мощность на выходном валу.
Зная эту информацию об общей работе двигателя постоянного тока, на рисунке 2 теперь показано конкретное расположение двигателей постоянного тока серии:
Рис. 2: Упрощенная принципиальная схема для двигателей постоянного тока с последовательной обмоткой.Обратите внимание, как обмотка возбуждения последовательно подключена к ротору.
Изучая рисунок 2, становится ясно, почему эти двигатели известны как двигатели постоянного тока с «последовательной обмоткой»; их обмотка возбуждения питается от источника постоянного тока и соединена последовательно с обмоткой якоря. Это означает, что тот же ток, который питает обмотки якоря, также питает обмотки возбуждения. Чтобы сделать это эффективно, обмотка возбуждения намотана всего несколькими витками провода большого сечения, чтобы она могла пропускать полный ток якоря, а также ток статора и обеспечивать минимально возможное сопротивление.Это противоположно шунтирующим двигателям постоянного тока, которые соединяют свои обмотки возбуждения параллельно с якорем, что дает разные эффекты (полное объяснение можно найти в нашей статье о шунтирующих двигателях постоянного тока). Если поменять местами выводы обмоток возбуждения или обмотки ротора, это может привести к тому, что двигатель изменит направление вращения, и эти двигатели станут реверсивными. Кроме того, с некоторыми незначительными модификациями эти двигатели могут работать от переменного тока и известны как универсальные щеточные двигатели.
Технические характеристики электродвигателей постоянного тока серииСуществует несколько основных спецификаций, которые могут помочь разработчикам выбрать правильную модель двигателя постоянного тока, и в этой статье мы кратко рассмотрим некоторые из них.Обратите внимание, что двигатели серии постоянного тока имеют больше спецификаций, чем описано в этом разделе, и в нем описаны только основные значения, которые должны быть известны в большинстве случаев.
Номинальное напряжение
Номинальное напряжение описывает источник постоянного тока, необходимый для работы двигателя. Это минимальное значение, которое следует использовать, но допускается и немного большее значение. Обратите внимание, что использование более высокого напряжения может вызвать повреждение / выгорание двигателя из-за большого тока в обмотке возбуждения, поэтому следует соблюдать осторожность при превышении номинального напряжения.
Срок службы кисти
Эти двигатели используют механическую коммутацию для подключения источника питания к обмоткам якоря; в результате угольные щетки, которые являются точками соединения для этой коммутации, со временем изнашиваются, и их необходимо периодически заменять. Большинство двигателей постоянного тока обеспечивают срок службы используемых щеток (обычно в часах), и важно отслеживать, как долго щетки использовались, чтобы предотвратить повреждение.
Непрерывная и пиковая мощность
Мощность последовательного двигателя постоянного тока, номинальная мощность в л.с. или кВт, — это выходная энергия, обеспечиваемая двигателем.Для серийного двигателя постоянного тока, когда он работает в непрерывном режиме, должна быть указана его непрерывная мощность, так как пиковая мощность должна использоваться только в течение коротких периодов времени, например, при пуске.
Диапазон скоростей
Двигатели постоянного тока серии, когда их выходной вал не нагружен, будут продолжать ускоряться до тех пор, пока они не разрушатся. Это является следствием последовательного подключения обмотки возбуждения к якорю и является наиболее серьезным недостатком этих двигателей. По этой причине ни при каких обстоятельствах эти двигатели не должны работать без нагрузки, и они всегда должны быть нагружены.В большинстве листов спецификаций указывается безопасный / максимальный диапазон оборотов, при которых эти двигатели не ломаются, и их следует тщательно учитывать при выборе модели двигателя.
Заявки и критерии отбора
Из-за больших катушек в обмотках эти двигатели обеспечивают большой пусковой момент на низкой скорости. Обычно они предназначены для создания максимально возможного пускового момента и часто используются в качестве стартеров для других двигателей или в других промышленных приложениях.Как указывалось ранее, их управление скоростью довольно плохое, а управление скоростью возможно только с помощью частотно-регулируемых приводов (ЧРП); однако, как правило, не рекомендуется использовать последовательный двигатель постоянного тока, если управление скоростью важно для конструкции, поскольку другие электродвигатели были разработаны для достижения этой цели без дополнительных недостатков, таких как синхронные двигатели, асинхронные двигатели и шаговые двигатели (подробнее информацию о синхронных двигателях, асинхронных двигателях и шаговых двигателях можно найти в наших статьях).
Это не означает, что двигатели постоянного тока с последовательной обмоткой обязательно менее полезны, чем электродвигатели других конструкций. Их нелинейная скорость и увеличенный пусковой крутящий момент наиболее эффективно использовались с большими нагрузками, такими как краны, лебедки и другие машины, которые должны перемещать тяжелые грузы медленно, а более легкие — быстрее. Его конструкция с регулируемой скоростью позволяет использовать его для пылесосов, швейных машин, электроинструментов, тяговых устройств, лифтов и многого другого. Это рабочая лошадка современной промышленности и отличная машина, если ее использовать в правильных условиях.
Сводка
В этой статье представлено понимание того, что такое двигатели постоянного тока с серийной обмоткой и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- http://www.ece.uah.edu/courses/material/EE410-Wms2/Electric%20motors.pdf
- http://www2.mae.ufl.edu/designlab/Class%20Projects/Background%20Information/Electric%20DC%20motors.htm
- http://fab.cba.mit.edu
- https://electrical-engineering-portal.com/4-types-of-dc-motors-and-their-characteristics
- https://www.engineersedge.com
- https://www.monolithicpower.com
Прочие изделия из двигателей
Больше от Machinery, Tools & Supplies
Двигатели постоянного тока
Электродвигатели постоянного тока
Когда дело доходит до истории электродвигателей, электродвигатели постоянного тока были первой широко используемой формой электродвигателей, поскольку они могли питаться от существующего источника постоянного тока для освещения. системы распределения.Первый коммутаторный электродвигатель постоянного тока, способный вращать механизмы, был изобретен британским ученым Уильямом Стердженом в 1832 году, а электродвигатель переменного тока — нет. продолжались до конца 1800-х годов, примерно в 1887 году.
Двигатели постоянного токаизначально проектировались как двухобмоточные. Одна обмотка находилась в «раме» или неподвижной части двигателя, а вторая обмотка — во вращающейся. (арматура) часть. Взаимодействие магнитных полей, образованных этими двумя обмотками, вызвало вращение якоря и, таким образом, возможность питания нагрузки.
Строительство
Одним из основных компонентов якоря двигателя постоянного тока является «коммутатор». Это устройство представляет собой механизм, используемый для переключения входа большинства машин постоянного тока. Он состоит из токопроводящих сегменты изолированы друг от друга и от вала. Сегменты коммутатора («стержни») подсоединяются к концам катушек обмотки якоря. Подается ток через неподвижные щетки, которые контактируют с вращающимся коммутатором.Эти щетки имеют определенную ширину, соответствующую ширине сегмента коммутатора, так что приложенный ток возбуждает ОДНУ катушку якоря. Когда эта катушка находится под напряжением, она создает магнитное поле, которое выравнивается со стационарным полем в раме, и якорь поворачивается на это небольшое приращение ширины сегмента. Когда якорь поворачивается, этот процесс повторяется в течение полного вращения на 360 °. Поскольку двигатель подключен к машина (нагрузка), мощность передается оптимальным образом, так как якорь вращается от полюса к полюсу.В свете усовершенствованных технологий в электронных контроллерах, бессенсорных элементах управления, асинхронных двигателях и поля двигателя с постоянными магнитами, асинхронные двигатели с внешней коммутацией и двигатели с постоянными магнитами вытесняют двигатели с электромеханической коммутацией во многих приложения и проекты.
Корпуса
Существуют различные типы корпусов для двигателей постоянного тока, наиболее распространенным из которых является ODP (Open Drip-Proof).Есть также TEFC (полностью закрытый вентилятор с охлаждением), TENV (полностью закрытый Невентилируемый и TEBC (полностью закрытый вентилятор с охлаждением). Последний тип, TEBC, используется в большинстве конструкций с более высокой мощностью, а двигатели — в приложениях, которые могут быть в зависимости от условий эксплуатации, когда они работают на МЕДЛЕННЫХ СКОРОСТЯХ в течение длительного времени. В таком случае низкая скорость вращения якоря не позволяет внутренний охлаждающий вентилятор для производства воздуха, достаточного для уменьшения количества тепла, выделяемого необходимой мощностью.Как и в случае с другими электродвигателями, условия эксплуатации также имеют существенное значение. подшипник от выбранного типа корпуса.
Мы рассмотрим некоторые дополнительные сведения о некоторых из этих типов двигателей постоянного тока в темах, показанных ниже.
Двигатель с параллельной обмоткой
На этой фотографии показан корпус 4-полюсного двигателя постоянного тока с «шунтирующими» (полевыми) катушками {4 большие катушки} и «межполюсными» (компенсирующими) катушками (4 меньшие / более узкие катушки}.В «шунтирующие» полевые катушки состоят из множества витков проволоки малого диаметра; т.е. 1500 витков провода №24, в то время как «последовательные» катушки состоят из нескольких витков большого провода; т.е. 20 витки провода №8 (или провода прямоугольного сечения). Последовательные катушки подвергаются воздействию того же тока, который проходит через цепь якоря (который может составлять сотни ампер), поэтому провод должен быть достаточно большим, чтобы пропускать ток без перегрева.Шунтирующие обмотки могут использоваться и / или подключаться в различных конфигурациях для изменения рабочего режима. характеристики мотора.
Например, они могут быть подключены к «отдельному» внешнему источнику питания, чтобы предложить им полностью управляемый, изменяемый и изменяемый источник напряжения. Этот источник питания мог бы обычно поступают от привода постоянного тока, который питает двигатель постоянного тока, или, возможно, от «системы аккумуляторных батарей» или, возможно, от генератора.Этот двигатель обычно называют «двигателем с шунтовой обмоткой с отдельным возбуждением». Этот тип подключения также позволяет «поле» двигателя будет «ослаблено», что заставит двигатель работать быстрее. Иногда, в конкретном приложении, желательно «увеличить скорость» двигателя во время конкретная часть операции. Например, вы можете захотеть, чтобы механизированная «станина строгального станка» работала медленно в направлении «резания», но двигалась быстрее при «обратном» ходе кровать.Ослабление поля может помочь нам добиться этого.
Их также можно подключить «параллельно» (шунтировать) к источнику питания якоря. В связи с этим изменение напряжения и тока якоря также повлияет на напряжение в катушки возбуждения. Таким образом подключается стандартное подключение для двигателя, который обычно работает с одной постоянной скоростью.
«Межполюсные» или «компенсирующие» обмотки были введены в двигатель постоянного тока для улучшения процесса «коммутации» между щетками и коммутатором.Без между межполюсными обмотками было обнаружено, что щетки при работе двигателя «дуги» или «искрились». Улучшение за счет введения этих катушек в цепь якоря было важно в отношении обслуживания двигателя постоянного тока.
Эти промежуточные полюса помогают управлять «скоростью» и «компенсировать крутящий момент», поскольку они применяются к цепи якоря двигателя. Это действие переносит нас в «Стабилизированный двигатель с шунтирующей обмоткой» обсуждается в следующей теме.
Стабилизированный двигатель с шунтовой обмоткой
Стабилизированный двигатель с параллельной обмоткой — это двигатель постоянного тока, в котором полевая цепь подключается либо параллельно цепи якоря, либо к отдельному источнику напряжения возбуждения, и к которому также добавлена легкая последовательная обмотка для предотвращения повышения скорости или для получения небольшого снижения скорости с увеличением нагрузки.
Эта «вторичная» катушка состоит не более чем из нескольких витков (от 4 до 20) провода «большого» размера. Эта катушка включена последовательно с цепью «якорь». поэтому он должен быть достаточно большим, чтобы проводить такой же ток, который проходит через якорь. Эта катушка с проволокой просто «наматывается» по окружности шунтирующей катушки. А слой изоляционной бумаги обычно сначала оборачивается, затем витки последовательной катушки наматываются вокруг бумаги.Он удерживается на месте стяжным шнуром, а затем изолируется окунание и запекание, чтобы собрать всю сборку в одну жесткую упаковку. Этот законченный узел затем помещается на «полюсный наконечник» двигателя (сборка из многослойной стали) и подключен к другим катушкам возбуждения.
Когда сборка двигателя будет завершена, «последовательные» катушки будут соединены вместе и включены последовательно с цепью якоря. Когда двигатель находится под напряжением, шунт поле подключено к его источнику питания (источник постоянного напряжения), а цепь якоря подключена к его источнику питания (обычно переменный источник питания от постоянного тока диск или что-то подобное).Во время работы двигателя шунтирующее поле создает постоянный магнитный поток, используемый для создания крутящего момента, необходимого для перемещения нагрузки. В качестве нагрузка увеличивается, ток через «последовательную» катушку увеличивается, потому что он находится в цепи якоря. По мере увеличения тока создается дополнительный поток (поскольку он обернутый вокруг катушки шунтирующего поля), и этот поток ДОБАВЛЯЕТСЯ к нормальному потоку, создаваемому катушками шунтирующего поля. Двигатель стал БОЛЕЕ мощнее, но, что более важно, он стал более мощным. становятся более СТАБИЛЬНЫМИ, когда речь идет о регулировании скорости в зависимости от увеличения нагрузки.Отсюда и название … Стабилизированный двигатель постоянного тока с шунтовой обмоткой.
Этот тип двигателя широко используется в: печатных машинах, конвейерах, упаковочном оборудовании и экструдерах для пластмасс.
Мотор с комбинированной обмоткой
Двигатель с комбинированной обмоткой — это двигатель постоянного тока с двумя отдельными обмотками возбуждения. Одно, обычно преобладающее поле (а также обычно «шунтирующее» поле), подключено параллельно цепи якоря, а другое — последовательно с цепью якоря.
Оба набора катушек возбуждения объединяются для обеспечения необходимого количества магнитного потока для облегчения вращения якоря с желаемой скоростью. Двигатель постоянного тока с составной обмоткой — это сочетание двигателя постоянного тока с шунтирующей обмоткой и двигателя постоянного тока с последовательной обмоткой, что приводит к лучшим характеристикам обоих этих типов. Двигатель постоянного тока с параллельной обмоткой очень эффективен при регулировании скорости, в то время как двигатель серии постоянного тока имеет высокий пусковой момент.
Таким образом, двигатель постоянного тока с комбинированной обмоткой представляет собой компромисс между двумя конструкциями двигателя, что дает хорошее сочетание правильного регулирования скорости и высокого пускового момента. И хотя его пусковой крутящий момент не такой высокий, как у двигателя постоянного тока с последовательной обмоткой, Регулировка скорости так же хороша, как и у двигателя постоянного тока с параллельной обмоткой, общие характеристики двигателя постоянного тока с комбинированной обмоткой находятся где-то между этими двумя крайними пределами.
В дополнение к определениям, упомянутым выше, нам необходимо также обсудить ДВА типа двигателей постоянного тока с «составной» обмоткой … «Накопительный» и «Дифференциальный». Эти два типа различаются в зависимости от способа подключения «составной (последовательной) обмотки».
Если «шунтирующая» обмотка и «последовательная» обмотка соединены таким образом, что магнитные линии потока становятся «аддитивными», то мы говорим, что двигатель подключен как «Накопительный составной двигатель постоянного тока.При таком подключении, когда двигатель нагружен, через «последовательную» обмотку проходит больше тока. А поскольку магнитный поток, создаваемый «Последовательная» и «шунтирующая» обмотки находятся в «аддитивном» режиме, магнитный поток сильнее, двигатель имеет больший пусковой момент, и регулирование скорости будет лучше. Это самый желательный и часто используемый тип соединения для «двигателя постоянного тока с составной обмоткой». Типичные области применения электродвигателя постоянного тока со смешанной обмоткой: смесители, прокатные станы, штамповочные прессы, ножницы по металлу и подъемники.
Второй тип подключения — это «дифференциальный» двигатель постоянного тока с составной обмоткой. В связи с этим «шунтирующая» обмотка и «последовательная» обмотка включаются в такие таким образом, магнитный поток, создаваемый этими обмотками, на самом деле «противостоит» друг другу. Таким образом, двигатель будет работать с довольно постоянной скоростью независимо от Загрузка. Этот тип соединения широко используется в лифтах и эскалаторах.
Мотор с обмоткой серии Двигатели серииDC — это мощность поездов, которые мы видим каждый день. Поскольку широкая публика смотрит на железнодорожную отрасль, двигатель поезда — это «дизельный» двигатель. И наш общие знания останавливаются и говорят: «… дизель как дизель», а по дороге — «18-колесный». Но это просто неправильный ответ. «Дизельный» участок железной дороги двигатель поезда отрасли, не что иное, как «ДИЗЕЛЬНЫЙ ГЕНЕРАТОР».Мощность, которая приводит в движение колеса двигателя, представляет собой «тяговый двигатель постоянного тока с последовательной обмоткой».
Поскольку скорость серийного двигателя может быть опасно высокой, серийные двигатели часто имеют редуктор или напрямую подключаются к нагрузке. Посмотрите внимательно на фото выше; увидеть эту «дыру» вправо, рядом с ведущей шестерней? Это отверстие, через которое устанавливается ось ведущих колес двигателя поезда. Прямозубая шестерня на оси двигателя сопрягается с шестерня двигателя постоянного тока для абсолютно прямого подключения.Здесь нет пробуксовки коробки передач !!!
«Серийный двигатель постоянного тока» имеет якорь и катушки возбуждения, соединенные ПОСЛЕДОВАТЕЛЬНО. Это означает, что на обе обмотки подается одинаковое НАПРЯЖЕНИЕ. Кроме того, ток, который проходит через якорь проходит и через катушки возбуждения. Мы знаем из других тем, что по мере увеличения тока / напряжения увеличивается напряженность поля, а это означает, что ВЫХОД МОМЕНТ, увеличивается.
Итак, когда мы загружаем серийный двигатель, он замедляется и требует БОЛЬШЕ тока для управления нагрузкой.По мере увеличения ТОКА через якорь и поле поле усиливается и мотор становится мощнее. Это похоже на бесконечный круг. И на самом деле это так. Ограничивающим фактором является НАПРЯЖЕНИЕ. Если мы будем контролировать напряжение, мы контролируем скорость. Так что нам делать с поездом? Если инженер хочет, чтобы поезд ехал быстрее или ему нужно больше мощности, он (или она) нажимает на педаль газа. «дизельный генератор».Генератор ускоряется, выдает БОЛЕЕ ВЫСОКОЕ НАПРЯЖЕНИЕ, а «последовательный двигатель постоянного тока» работает быстрее. Если двигатель глохнет, как если бы поезд остановился, получить «газиллион» товарных вагонов, катящихся, ток ограничен только общим сопротивлением обмоток и крутящий момент может быть очень большим, но есть опасность обмотки перегреваются.
Серьезная проблема, связанная с двигателем постоянного тока с последовательной обмоткой, заключается в том, что делает его таким мощным устройством.Двигатель ДОЛЖЕН быть подключен к нагрузке определенного размера. Если двигатель постоянного тока с последовательной обмоткой подключен к «бесконечно» мощному источнику, и эта мощность находится под напряжением, НО двигатель не подключен к нагрузке, двигатель будет ОЧЕНЬ БЫСТРО ускоряться, и из-за природы устройства, будет пытаться ПРОДОЛЖИТЬ ускоряться. Он практически (и буквально) разлетится !!! Поэтому, если вы работаете с серийным двигателем постоянного тока, НИКОГДА не включайте его без с подключенной нагрузкой.
Двигатель с постоянным магнитом
Электродвигатель постоянного тока с постоянными магнитами стал основным инструментом в приложениях с низкой мощностью. У нас все еще есть проблема обслуживания, как и у любого двигателя постоянного тока, щетки и коммутатор, но «шунтирующее» поле (обмотка возбуждения) заменено постоянным магнитом.
Строительство
Магнит изготовлен из «спеченного» (порошкообразного) металла, который прессуется под высоким давлением и нагреванием до такой формы, которая соответствует корпусу двигателя. Рамка.Эти металлические формы после изготовления подвергаются воздействию сильного магнитного поля, которое объединяет молекулы в магнитные частицы. По завершении каждый кусок будет иметь СЕВЕРНЫЙ и ЮЖНЫЙ полюс. если вы сломаете его пополам, у каждой части будет СЕВЕР и ЮЖНЫЙ полюс. Какими бы маленькими ни были кусочки … у них будет СЕВЕР и ЮГ столб. Эти готовые магниты затем «приклеиваются» к внутренней части корпуса двигателя, и он готов для «намотки», концевых колец, подшипников и щеток.Когда полностью В собранном виде распределительная коробка имеет всего 2 провода, которые подключаются к щеткам. Вот и все! Двигатели компактны и дешевле в производстве. Так что многое предстоит рад за.
Жизнь магнита
Иногда возникает вопрос о сроке службы магнитов … Я нашел в Интернете источник из Соединенного Королевства (www.first4magnets.com), который состояния: «…. Неодимовые магниты — это постоянные магниты, и каждые 100 лет они теряют примерно 5% своей производительности «. С того места, где я сижу, это выглядит неплохо. являются «сторонними поставщиками», которые специализируются на «повторном намагничивании» постоянных магнитов, но в большинстве случаев из-за экономичности двигателя с постоянными магнитами обычно лучше куплю полностью новый мотор.
Советы по безопасности и обслуживанию
Здесь мы предложим вам примечание по техобслуживанию и технике безопасности.Сила PM чрезвычайно высока, и чем больше магнит, тем сильнее притяжение. Когда вы разбираете / собираете двигатель с постоянными магнитами, держите руки и пальцы подальше от «отверстия» корпуса внутри магнитов. Когда вы снова вставляете арматуру обратно в рама, тяга очень сильная, и если ваш палец будет мешать, это может иметь катастрофические последствия.
Другой момент заключается в том, что PM хочет иметь что-то, в чем собирается его магнитное поле.Якорь служит этой цели, когда двигатель собран. Но когда это НЕ, то поток магнитного поля от ФЭУ проходит через воздушный зазор. Это действие, если ему разрешено существовать долгое время (не спрашивайте меня, как long), может «истощить» их мощность PM и ослабить их. Помните цифру 5% за 100 лет? Не сокращайте эту жизнь, осушая магнит. Просто поместите стальной стержень (вал шток), ключ, что-то из стали, в отверстие, чтобы магниты могли поглощать поток.
Доступная выходная мощность
Следующий абзац был скопирован из заседания комитета IEEE 1994 года:
Двигатели с постоянными магнитами теперь могут достигать тысячи лошадиных сил. Относительные преимущества геометрии диска, вращающегося цилиндра и чашечного ротора: зависит от частоты вращения вала и уровня мощности. Бесщеточные дисковые двигатели с приводами с широтно-импульсной модуляцией были продемонстрированы в диапазоне от 200 до 20000 об / мин и от 10 до 700 об / мин. Лошадиные силы.
И хотя это утверждение, скорее всего, верно с исследовательской и теоретической точки зрения, я не уверен, что оно применимо к нашему общему промышленному климату сегодня. И пока Я видел несколько онлайн-объявлений о двигателях с постоянными магнитами до 10 л.с., и я считаю, что на самом деле большинство производителей промышленных электродвигателей собираются превзойти свои предложения в диапазоне от 2 до 3 л.с.Частичное до 2 л.с. — это то место, где сегодня отрасль выглядит. И большинство двигателей постоянного тока с постоянными магнитами имеют корпусную конструкцию TENV или TEFC.
Сводка
Еще одно предостережение для вас … поскольку вы хотите применить двигатель постоянного тока к своему проекту, я предполагаю, что вы будете приводить в действие этот двигатель с помощью привода постоянного тока какой-то современный дизайн. Это так и должно быть. Однако будьте осторожны, если собираетесь применить привод постоянного тока к «более старому» двигателю постоянного тока.В зависимости от возраста двигателя он может НЕ быть подходит для работы с современными контроллерами SCR. Просто будьте осторожны.
Если вас интересует дополнительная информация о двигателях постоянного тока, перейдите по этой ссылке на Wikipedia.org ©. Это действительно подробная и хорошо написанная статья.
Мотор-генератор | Лифт вики | Фэндом
- Чтобы узнать о других значениях лифтов, связанных с MG, см. MG.
Заброшенный мотор-генератор Fujitec.
Мотор-генераторная установка (или M-G set ) — это машина, обычно встречающаяся на старых установках тяговых лифтов. Его основная цель состоит в том, чтобы преобразовать электричество переменного тока (AC) в здание постоянного тока (DC) для питания подъемной машины постоянного тока и контроллера лифта.
Функция
На высокоскоростных лифтах использование двухскоростного двигателя переменного тока становится непрактичным из-за трудностей, связанных с замедлением кабины лифта и точным выравниванием ее по полу.Традиционно для решения этой проблемы использовались подъемные механизмы постоянного тока, поскольку они позволяли практически неограниченно регулировать их скорость путем изменения тока или напряжения, подаваемого на обмотки якоря. Однако проблема в том, что в здание подается электричество переменного тока. Комплект M-G состоит из двигателя переменного тока, который работает непрерывно и приводит в действие генератор постоянного тока, который, в свою очередь, подключен к подъемной машине. Обмотки возбуждения генератора подключены к блокам резисторов внутри контроллера реле, которые, в свою очередь, последовательно включаются и выключаются для изменения выходной мощности генератора, таким образом изменяя скорость лифта.При беге они издают очень характерный звук, который иногда можно услышать из кабины лифта.
Недостатки
Лебедка постоянного тока с приводом от комплекта M-G была отраслевым стандартом для высокоскоростных лифтов до 1980-х годов. Ключевым недостатком является более высокое потребление энергии, поскольку установка M-G должна работать постоянно, когда лифт используется, даже когда кабина неподвижна. Однако схема таймера в контроллере отключит установку M-G после того, как лифт простаивает в течение установленного периода времени.
УстановкиM-G также требуют значительного обслуживания, так как угольные щетки со стороны генератора регулярно нуждаются в замене. Появление твердотельных частотно-регулируемых приводов для двигателей подъемных механизмов переменного тока означает, что скорость подъемного механизма переменного тока может регулироваться так же точно, но без сложности и более высоких требований к энергии, чем у набора M-G. Твердотельные накопители также могут быть применены к существующим подъемным машинам постоянного тока, то есть их можно использовать для модернизации старых установок на базе MG без дополнительных затрат на замену всей лифтовой машины.Это обеспечивает экономичную модернизацию старых зданий.
Галерея
Винтажный мотор-генератор Otis (кредит пользователя Flickr Tom Magliery, лицензия CC BY-NC-SA 2.0)
Старый мотор-генератор Otis, больше не работает (кредит пользователя YouTube mrmattandmrchay)
Общая информация
- Как сообщает «hkelev.com», механики лифтов в Гонконге, Китай, прозвали мотор-генератор «поросёнком» (также известный как 「豬仔」 по-китайски). [1]
Примечания и ссылки
Внешние ссылки
Как работают моторы и как выбрать мотор для любого проекта
Как работают двигатели и как выбрать правильный двигатель
Моторы можно найти практически везде.Это руководство поможет вам изучить основы электродвигателей, доступные типы и способы выбора правильного электродвигателя. Основные вопросы, на которые нужно ответить при принятии решения о том, какой двигатель наиболее подходит для применения, — это какой тип выбрать и какие характеристики имеют значение.Как работают моторы?
Электродвигатели работают, преобразуя электрическую энергию в механическую энергию для создания движения. Сила создается внутри двигателя за счет взаимодействия между магнитным полем и переменным (AC) или постоянным (DC) током обмотки.С увеличением силы тока увеличивается и сила магнитного поля. Помните о законе Ома (V = I * R); напряжение должно увеличиваться, чтобы поддерживать тот же ток при увеличении сопротивления. Электродвигатели имеют множество применений. Обычные промышленные применения включают воздуходувки, станки и электроинструменты, вентиляторы и насосы. Любители обычно используют двигатели в небольших приложениях, требующих движения, таких как робототехника или модули с колесами.
Типы двигателей:
Существует много типов двигателей постоянного тока , но наиболее распространены щеточные или бесщеточные.Также существуют вибрационные двигатели, шаговые двигатели и серводвигатели.Щеточные двигатели постоянного тока — одни из самых простых и используются во многих бытовых приборах, игрушках и автомобилях. Они используют контактные щетки, которые подключаются к коммутатору для изменения направления тока. Они недороги в производстве, просты в управлении и обладают отличным крутящим моментом на низких скоростях (измеряется в оборотах в минуту или об / мин). Некоторые недостатки заключаются в том, что они требуют постоянного обслуживания для замены изношенных щеток, имеют ограниченную скорость из-за нагрева щеток и могут создавать электромагнитный шум из-за искрения щеток.
Щеточный двигатель постоянного тока
Бесщеточные двигатели постоянного тока используют постоянные магниты в роторном узле. Они популярны на рынке хобби для применения в самолетах и наземных транспортных средствах. Они более эффективны, требуют меньше обслуживания, производят меньше шума и имеют более высокую удельную мощность, чем щеточные двигатели постоянного тока. Они также могут производиться серийно и напоминать двигатель переменного тока с постоянной частотой вращения, за исключением того, что они питаются от постоянного тока. Однако есть несколько недостатков, в том числе то, что ими сложно управлять без специального регулятора, и они требуют низких пусковых нагрузок и специализированных редукторов в приводных приложениях, что приводит к их более высоким капитальным затратам, сложности и экологическим ограничениям.
Бесщеточный двигатель постоянного тока
Вибрационные двигатели используются в приложениях, требующих вибрации, например, в мобильных телефонах или игровых контроллерах. Они генерируются электродвигателем и имеют неуравновешенную массу на приводном валу, которая вызывает вибрацию. Их также можно использовать в неэлектронных зуммерах, которые вибрируют для звуковой сигнализации или для сигналов тревоги или дверных звонков.
Вибрационный двигатель
Когда требуется точное позиционирование, шаговые двигатели — ваш друг.Они используются в принтерах, станках и системах управления технологическими процессами и рассчитаны на высокий удерживающий момент, который дает пользователю возможность переходить от одного шага к другому. У них есть система контроллера, которая определяет положение посредством сигнальных импульсов, посылаемых драйверу, который интерпретирует их и передает пропорциональное напряжение на двигатель. Их относительно просто изготовить и контролировать, но они постоянно потребляют максимальный ток. Расстояние небольшого шага ограничивает максимальную скорость, и шаги можно пропустить при высоких нагрузках.
Шаговый двигатель
Серводвигатели — еще один популярный двигатель на рынке хобби, который используется для неточного управления положением. Их популярные приложения включают приложения дистанционного управления, такие как игрушечные радиоуправляемые автомобили и робототехника. Они состоят из двигателя, потенциометра и схемы управления и в основном управляются с помощью широтно-импульсной модуляции (ШИМ), посредством отправки электрических импульсов на провод управления. Сервоприводы могут быть как переменного, так и постоянного тока. Сервоприводы переменного тока могут справляться с более высокими скачками тока и используются в промышленном оборудовании, тогда как сервоприводы постоянного тока предназначены для небольших любительских приложений.Чтобы узнать больше о сервоприводах, ознакомьтесь с нашей статьей Как работают сервомоторы .
Существует три основных типа двигателей переменного тока: асинхронные, синхронные и промышленные.
Асинхронные двигатели называются асинхронными двигателями, поскольку они не вращаются с одинаковой постоянной скоростью или не медленнее, чем указанная частота. Скольжение , разница между фактической и синхронной скоростью, необходимо для создания крутящего момента , крутящего момента, вызывающего вращение, в асинхронных двигателях.Магнитное поле, окружающее ротор этих двигателей, создается индуцированным током.
Ротор синхронных двигателей вращается с постоянной скоростью при подаче переменного тока. Их магнитное поле создается постоянными магнитами. Промышленные двигатели предназначены для трехфазных систем с высокой мощностью, таких как конвейеры или воздуходувки. Двигатели переменного тока также можно найти в бытовой технике и других приложениях, таких как часы, вентиляторы и дисководы.
Что учитывать при покупке мотора:
При выборе двигателя необходимо обратить внимание на несколько характеристик, но наиболее важными являются напряжение, ток, крутящий момент и скорость (об / мин).Ток — это то, что питает двигатель, и слишком большой ток приведет к его повреждению. Для двигателей постоянного тока важны рабочий ток и ток останова. Рабочий ток — это средняя величина тока, которую двигатель может потреблять при типичном крутящем моменте. Ток останова обеспечивает достаточный крутящий момент для двигателя, чтобы работать со скоростью останова, или 0 об / мин. Это максимальный ток, который двигатель может потреблять, а также максимальная мощность, умноженная на номинальное напряжение. Радиаторы важны, если двигатель постоянно работает или работает с напряжением выше номинального, чтобы катушки не плавились.
Напряжение используется для поддержания протекания чистого тока в одном направлении и для преодоления обратного тока. Чем выше напряжение, тем выше крутящий момент. Номинальное напряжение двигателя постоянного тока указывает на наиболее эффективное напряжение во время работы. Обязательно подайте рекомендованное напряжение. Если вы приложите слишком мало вольт, двигатель не будет работать, тогда как слишком высокое напряжение может привести к короткому замыканию обмоток, что приведет к потере мощности или полному разрушению.
Рабочие значения и значения остановки также необходимо учитывать с крутящим моментом.Рабочий крутящий момент — это величина крутящего момента, которую двигатель был разработан, а крутящий момент при остановке — это величина крутящего момента, возникающая при подаче мощности от скорости остановки. Вы всегда должны смотреть на требуемый рабочий крутящий момент, но в некоторых случаях вам потребуется знать, насколько далеко вы можете толкнуть двигатель. Например, для колесного робота хороший крутящий момент равен хорошему ускорению, но вы должны убедиться, что крутящий момент сваливания достаточно высок, чтобы поднять вес робота. В этом случае крутящий момент важнее скорости.
Скорость или скорость (об / мин) может быть сложной для двигателей. Общее правило заключается в том, что двигатели наиболее эффективно работают на самых высоких скоростях, но это не всегда возможно, если требуется передача. Добавление шестерен снизит эффективность двигателя, поэтому примите во внимание снижение скорости и крутящего момента.
Это основные принципы, которые следует учитывать при выборе двигателя. Подумайте о назначении приложения и о том, какой ток он использует, чтобы выбрать подходящий тип двигателя. Технические характеристики приложения, такие как напряжение, ток, крутящий момент и скорость, будут определять, какой двигатель является наиболее подходящим, поэтому обязательно обратите внимание на его требования.
Есть ли у вас дополнительные советы по выбору двигателей? Дайте нам знать по телефону [адрес электронной почты защищен] .
Может ли двигатель постоянного тока работать от сети переменного тока и наоборот? Полное объяснение.
Может ли двигатель постоянного тока работать от сети переменного тока и наоборот?
Электродвигатель — это машина, которая может преобразовывать электрическую энергию в механическую. Есть много применений двигателя постоянного тока. Сегодня мы узнаем, Может ли двигатель постоянного тока работать от источника переменного тока и наоборот? Возможно, у вас в голове есть этот вопрос, так что давайте знать.
Влияние источника переменного тока на двигатель постоянного тока.
(1) Влияние источника переменного тока на параллельный двигатель постоянного тока:
Мы уже знаем, что если мы поменяем местами клеммы параллельного двигателя постоянного тока, вращение двигателя не изменится. Для изменения вращения параллельного двигателя постоянного тока мы должны поменять местами клеммы любого терминала якоря или полевого терминала. Таким образом, можно сказать, что шунтирующий двигатель постоянного тока может работать от источника переменного тока.
Я также согласен с вами, но он не будет работать идеально, потому что,
Поскольку двигатель работает от постоянного тока, поэтому обмотка возбуждения и якоря предназначены для питания постоянного тока.Обмотка для постоянного тока всегда имеет большее сопротивление, чем обмотка для переменного тока. Таким образом, когда мы подаем переменный ток, в обмотке будет возникать самоиндукция, которая противодействует току, что еще больше снижает производство магнитного потока. По этой причине двигатель будет работать с очень меньшей скоростью от сети переменного тока.
Когда двигатель постоянного тока работает от сети переменного тока, в двигателе будут происходить большие потери и нагрев.
Но следует помнить, что двигатель постоянного тока с независимым возбуждением или с постоянным магнитом не будет работать, если поле подключено к источнику постоянного тока. Двигатель будет вибрировать.
(2) Влияние источника переменного тока на двигатель постоянного тока:
Мы уже знаем, что в двигателях серии постоянного тока обмотка возбуждения имеет гораздо меньшее сопротивление, чем шунтирующий двигатель постоянного тока, поскольку поле подключено последовательно с обмоткой якоря. Так что, если мы подадим питание переменного тока на двигатель серии постоянного тока, он будет работать идеально. Фактически, серия DC может работать как от источника переменного, так и от постоянного тока. Но оригинальный двигатель серии переменного тока имеет конструкцию, отличную от двигателя постоянного тока. Из-за того, что производитель разработал двигатель серии переменного тока для снижения потерь.
Читайте также: Разница между генератором и генератором Полное объяснение.
Влияние источника постоянного тока на двигатель переменного тока.
(1) Двигатель переменного тока не может работать от источника постоянного тока, поскольку для большинства двигателей переменного тока, таких как однофазные асинхронные двигатели, трехфазные асинхронные двигатели, синхронные двигатели, требуется переменный магнитный поток, а не статический поток. Как мы знаем, только переменный ток может создавать переменный поток. Таким образом, двигатель переменного тока не может работать с источником постоянного тока.
(2) Другое влияние питания постоянного тока на двигатель переменного тока заключается в том, что если мы подаем питание постоянного тока на двигатель переменного тока, то обмотки двигателя переменного тока могут сгореть, потому что, когда одна из причин — обмотки переменного тока всегда имеют меньше сопротивление, чем обмотки постоянного тока, и другая причина заключается в том, что когда мы подаем питание постоянного тока на двигатель переменного тока, в обмотках не возникает самоиндуктивности, которая может препятствовать протеканию тока в случае питания переменного тока.
Итак, исходя из приведенного выше объяснения, мы можем сказать, что двигатель постоянного тока может работать от источника переменного тока, но двигатель переменного тока не может работать от источника постоянного тока.
Это полное объяснение « Может ли двигатель постоянного тока работать от источника переменного тока и наоборот?» Если вам понравилась эта статья, поделитесь ею со своими друзьями, изучающими электротехнику, потому что это очень важная тема в электротехнике.
Читайте также:
Спасибо, что посетили сайт. продолжайте посещать для получения дополнительных обновлений.Принцип работы двигателя постоянного тока
— StudiousGuy
В нашей повседневной жизни мы сталкиваемся с множеством электрических устройств с батарейным питанием, которые преобразуют электрическую энергию в механическую, например фены, игрушечные транспортные средства, крошечные вентиляторы, триммеры и т. Д. Электрический компонент, отвечающий за это действие, — это двигатель постоянного тока, присутствующий внутри этих устройств. Двигатель постоянного тока — это устройство, которое работает от постоянного тока и преобразует его в механическую работу.Официальная заслуга в изобретении двигателя постоянного тока принадлежит американскому кузнецу Томасу Дэвенпорту; однако несколько других ученых, в том числе Уильям Стерджен и Фрэнк Джулиан Спраг, также внесли свой вклад в разработку двигателя постоянного тока. Сегодня двигатели постоянного тока стали неотъемлемой частью промышленного сектора и используются в различных приложениях, таких как двигатели электромобилей, лифты, краны и приводы сталепрокатных станов. Чтобы понять, как работает двигатель постоянного тока, давайте сначала рассмотрим компоненты, используемые в его конструкции.
Указатель статей (Нажмите, чтобы перейти)
Компоненты двигателя постоянного тока
Двигатель постоянного тока обычно выглядит как цилиндрическое устройство с выходящим из него валом, который вращается при приложении постоянного тока. Это действие выполняется путем расположения следующих компонентов определенным образом.
Статор
Статор или стальное ярмо представляет собой цилиндрический металлический кожух, внутри которого размещены все остальные элементы двигателя постоянного тока. Одна сторона статора содержит выходящий из нее вертикальный вал, а другая сторона имеет два вывода, к которым подключен источник постоянного тока.
Магниты
Внутри статора двигателя постоянного тока установлены два стационарных постоянных магнита. Они действуют как северный и южный полюса магнита, создавая поперек них горизонтальное магнитное поле.
Арматура
В электротехнике термин якорь относится к структуре вращающихся катушек под действием электромагнитной силы. В двигателе постоянного тока якорь состоит из ротора, расположенного между двумя магнитами. Ротор представляет собой структуру из многослойных дисков, обернутых катушкой проводящего поля.Вал, выходящий из двигателя, проходит вдоль оси якоря и вращается вместе с ней.
Полевая катушка
Катушка возбуждения или обмотка возбуждения в двигателе постоянного тока представляет собой катушку из медных проводов, которая заменяет постоянные магниты, прикрепленные к внутренним стенкам статора. Когда через эту катушку проходит постоянный ток от батареи, он образует электромагнит, полярность которого можно контролировать, создавая желаемое магнитное поле.
Коммутатор
Коммутатор представляет собой полую цилиндрическую деталь, сегментированную во многих местах для изменения полярности электромагнитной катушки якоря внутри двигателя постоянного тока.Это важная часть двигателя для работы от источника постоянного тока. Он находится на конце якоря вокруг вала. Концы катушки якоря подключены к коммутатору, а все остальные части, кроме щеток, электрически изолированы от него.
Кисти
Щетки в двигателе постоянного тока — это компоненты, которые соединяют статические клеммы с вращающимися частями двигателя. Обычно они изготавливаются из угольного графита, поскольку он отлично проводит электричество и обладает отличными смазочными свойствами.Коммутатор расположен между двумя щетками, которые дополнительно подключены к клеммам двигателя, замыкая цепь с источником питания постоянного тока.
Принцип работы двигателя постоянного тока
Двигатель постоянного тока работает по принципу, что всякий раз, когда проводник с током помещается в магнитное поле, он испытывает магнитную силу, направление которой задается правилом левой руки Флеминга. Другими словами, двигатель постоянного тока вращается из-за взаимодействия магнитного поля постоянного магнита с магнитным полем электромагнита с током.
Правило левой руки Флеминга
Правило левой руки Флеминга — это мнемонический инструмент, позволяющий понять взаимно перпендикулярные отношения между током, приложенным магнитным полем и индуцированной силой в электродвигателе. Если мы вытянем указательный палец, средний палец и большой палец левой руки во взаимно перпендикулярных направлениях, совместив средний палец с условным направлением тока внутри тока, а указательный палец — с приложенным магнитным полем, тогда большой палец даст направление силы, испытываемой проводником.Чтобы понять, как это работает внутри двигателя постоянного тока, давайте обсудим работу двигателя постоянного тока более подробно.
Работа двигателя постоянного тока
Чтобы понять, как работает двигатель постоянного тока, давайте сначала рассмотрим более простой случай, когда одна прямоугольная проволочная петля размещена внутри северного и южного полюсов постоянного магнита. Когда ток протекает через проволочную петлю, он создает вокруг нее магнитное поле, которое взаимодействует с ранее существовавшим магнитным полем постоянных магнитов, в результате чего возникает сила отталкивания, направление которой можно определить с помощью правила левой руки Флеминга.Направление тока для сегмента провода около северного полюса постоянного магнита — вперед (идущий от положительного полюса батареи), что приводит к тому, что сила направляется вниз. Точно так же для участка провода около южного полюса постоянного магнита ток течет назад (к отрицательному выводу батареи), заставляя силу быть направленной вверх. Два противоположных направления сил развивают крутящий момент в катушке, заставляя ее вращаться вокруг оси.
Тем не менее, одиночная петля из проволоки не обладает достаточной магнитной силой, чтобы преодолевать магнитный поток постоянных магнитов, и в конечном итоге остановится, образуя равновесие.Напряженность магнитного поля электромагнита усиливается за счет наматывания его на лопасти ротора. В двигателе постоянного тока ток поступает в катушку через коммутатор, который трется об одну из щеток, подключенных к источнику постоянного тока. Когда ток проходит через катушку, ротор начинает вращаться в результате действующего на него крутящего момента. Сегментация коммутатора позволяет якорю избегать положения равновесия, отключая некоторые катушки от источника питания и обеспечивая однонаправленный крутящий момент.Этот цикл периодически повторяется, что приводит к вращению вала, прикрепленного к якорю.
Типы двигателей постоянного тока
Электродвигатели постоянного тока (DC) повсеместно используются в современном промышленном секторе и служат для различных автомобильных приложений малого и среднего размера, от робототехники до транспорта. Из-за их универсальной функциональности на рынке доступно несколько типов двигателей постоянного тока, которые можно разделить на следующие категории в зависимости от их подключения:
Двигатель постоянного тока с постоянным магнитом
Двигатель постоянного тока с постоянными магнитами является типичным примером двигателя постоянного тока, в котором постоянные магниты создают поперечное магнитное поле внутри статора.Пара (или пары) радиально намагниченных постоянных магнитов прикреплены к внутренним стенкам статора, причем северный и южный полюса поочередно обращены друг к другу и создают однородное магнитное поле между ними. Цилиндрическая форма стального статора не только удерживает постоянные магниты, но и служит обратным каналом с низким сопротивлением для магнитного потока. Недостатком этих типов двигателей постоянного тока является то, что постоянные магниты могут со временем терять свои магнитные свойства; однако в некоторых усовершенствованных двигателях постоянного тока с постоянными магнитами магниты работают вместе с дополнительными катушками возбуждения, чтобы компенсировать потерю намагниченности.
Приложения
Двигатели постоянного тока с постоянными магнитами обычно используются в тех электрических устройствах, которые не потребляют много энергии и не требуют очень эффективного управления скоростью двигателя. Немногочисленные примеры таких электрических устройств — игрушечные машинки, дворники, нагнетатели горячего воздуха, приводы компакт-дисков и т. Д.
Двигатель постоянного тока с независимым возбуждением
Возбужденный двигатель постоянного тока содержит катушку электромагнитного поля вместо постоянных магнитов для создания магнитного поля внутри статора.Эти двигатели имеют устройство возбуждения поля, установленное внутри двигателя, которое генерирует магнитное поле с помощью электрического тока. В двигателе постоянного тока с независимым возбуждением цепь, обеспечивающая ток для возбуждения возбуждения, имеет источник напряжения, отличный от того, который подает ток на катушки якоря. Другими словами, ток, протекающий через катушки якоря, не течет через катушки устройств возбуждения поля. Устройство возбуждения поля работает с постоянным напряжением, тогда как катушки якоря могут иметь переменное напряжение для регулирования скорости двигателя.Кроме того, переключением полярности катушек возбуждения можно мгновенно изменить направление вращения вала двигателя. Тем не менее, недостатком является стоимость дополнительного источника напряжения, необходимого для возбуждения катушки возбуждения.
Приложения
Двигатели постоянного тока с раздельным возбуждением обычно встречаются в электроприборах, требующих вращения в обоих направлениях с точным контролем скорости. Они используются в различных устройствах, включая бумагоделательные машины, электрические силовые установки и даже контроллеры тяги в электропоездах.
Двигатели постоянного тока с самовозбуждением
Как следует из названия, электродвигатели постоянного тока с самовозбуждением имеют общий источник напряжения для катушек возбуждения и катушек якоря. Обе катушки могут быть подключены либо последовательно, либо параллельно, либо в некоторой комбинации последовательно-параллельной конфигурации. В зависимости от конфигурации подключения, двигатели постоянного тока с самовозбуждением подразделяются на следующие три категории:
Самовозбуждающийся двигатель постоянного тока с последовательной обмоткой
В двигателе постоянного тока с последовательным возбуждением катушка возбуждения внутри последовательно соединена с катушкой якоря.Хотя конструкция электродвигателя постоянного тока с последовательным возбуждением и самовозбуждением аналогична структуре других электродвигателей постоянного тока с возбуждением, катушка возбуждения самовозбуждающегося электродвигателя постоянного тока содержит относительно меньше витков и имеет более толстый провод, чем катушка якоря, что обеспечивает низкое электрическое сопротивление. В результате, создаваемый в этом случае электромагнитный момент намного выше, чем обычно, что приводит к более высокой скорости двигателя. Тем не менее, регулировка скорости в двигателях с самовозбуждением с последовательной обмоткой не так впечатляет, как в других двигателях с возбуждением.
Приложения
Из-за высокой скорости вращения самовозбуждающиеся двигатели с последовательной обмоткой обычно используются в качестве стартеров для тяжелых промышленных устройств, таких как краны и лифты.Кроме того, серийные двигатели часто используются только в течение короткого промежутка времени, например, нескольких секунд, потому что большой последовательный ток может сжечь катушки последовательного возбуждения, сделав двигатель бесполезным.
Двигатели постоянного тока с параллельным возбуждением и самовозбуждением
В двигателе постоянного тока с шунтовой обмоткой и самовозбуждением катушка возбуждения подключена параллельно катушке якоря двигателя, что приводит к одинаковому напряжению, но разному количеству и разному потоку тока для обеих катушек. По сравнению с обмоткой якоря двигателя постоянного тока обмотка возбуждения имеет значительно большее количество витков, чтобы увеличить полезную магнитную связь, и проводник меньшего диаметра для увеличения сопротивления (меньший ток).Это дает самовозбуждающемуся двигателю постоянного тока с шунтовой обмоткой уникальную способность саморегулировать свою скорость при приложении нагрузки к валу клемм ротора. Другими словами, когда двигатель переключается с холостого хода на нагруженный, скорость двигателя существенно не колеблется.
Приложения
Двигатели постоянного тока с шунтовой обмоткой и самовозбуждением обычно встречаются в устройствах, которые работают с постоянной скоростью. Их способность к саморегулированию скорости пригодится там, где требуется точное управление скоростью, например.g., шлифовальные станки, печатные машины, токарные станки и т. д. Тем не менее, нагрузка во время запуска двигателя должна быть ограничена, поскольку он не может обеспечить высокий пусковой крутящий момент.
Самовозбуждающиеся электродвигатели постоянного тока с комбинированной обмоткой
Самовозбуждающийся двигатель постоянного тока с составной обмоткой, также известный как составной двигатель постоянного тока, представляет собой комбинацию как последовательных, так и параллельных двигателей. В составных двигателях постоянного тока катушки возбуждения подключены к катушкам якоря как последовательно, так и параллельно.Цель такой структурной комбинации — получить лучшие качества обоих типов. Параллельный двигатель имеет очень эффективное регулирование скорости, тогда как последовательный двигатель имеет очень высокий начальный крутящий момент. В результате составной двигатель постоянного тока является фантастическим компромиссом с точки зрения этих характеристик. Обе катушки возбуждения работают вместе, чтобы обеспечить требуемый магнитный поток и желаемую скорость вращения. Основываясь на соединениях катушки возбуждения с катушкой якоря, двигатель постоянного тока с комбинированной обмоткой можно разделить на два основных типа:
- Длинные шунтовые двигатели постоянного тока с комбинированной обмоткой — это двигатели, в которых катушка возбуждения с параллельной обмоткой подключена параллельно через последовательную комбинацию якоря и катушки возбуждения.
- Короткие шунтирующие электродвигатели постоянного тока с составной обмоткой — это двигатели, в которых ток сначала проходит через катушку возбуждения с последовательной обмоткой, а затем разделяется на параллельное соединение катушки возбуждения с параллельной обмоткой и катушки якоря.
Кроме того, составные двигатели постоянного тока также можно разделить на две другие категории в зависимости от возбуждения и характеристик компаундирования:
- Суммарное смешение: В двигателе постоянного тока с кумулятивным составом поток шунтирующего поля, создаваемый катушкой шунтирующего поля, усиливает эффект основного потока поля, создаваемого катушкой последовательного поля.Другими словами, поток, создаваемый обмоткой шунтирующей катушки, складывается с потоком, создаваемым последовательной обмоткой катушки, чтобы получить общий поток.
- Дифференциальное смешивание: Двигатель называется дифференциальным, если поток шунтирующего поля снижает влияние основной последовательной обмотки. Это происходит из-за противоположной полярности катушки возбуждения с шунтирующей обмоткой и катушки с последовательной обмоткой. Поскольку чистый поток, созданный в этом случае, ниже, чем исходный поток, эта конфигурация вряд ли будет иметь какое-либо практическое применение.
Приложения
Подобно электродвигателям постоянного тока с шунтовой обмоткой и самовозбуждением, составной электродвигатель постоянного тока также часто используется в устройствах, требующих работы с быстрой и постоянной скоростью. Основное различие в их полезности состоит в том, что составные двигатели постоянного тока могут работать независимо от нагрузки, приложенной к валу.