


Вентильный двигатель — Википедия
Рис. 1. Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще, чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесколлекторным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
Описание и принцип работы[2]
Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока uq{\displaystyle u_{q}}, действие которого аналогично напряжению якоря двигателя постоянного тока, и ud{\displaystyle u_{d}}, аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы ud,uq{\displaystyle u_{d},u_{q}}, представляют собой проекции вектора напряжения управления Uy→={ud,uq}{\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат {d,q}{\displaystyle \{d,q\}}, связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций ud,uq{\displaystyle u_{d},u_{q}} в проекции uα,uβ{\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат {α,β}{\displaystyle \{\alpha ,\beta \}}, связанной со статором.
Как правило, в системах управления электропривода задаётся ud=0{\displaystyle u_{d}=0}[3], при этом уравнения преобразования координат принимают вид
uα=−uq⋅sinθ,{\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
uβ={\displaystyle u_{\beta }=} uq⋅cosθ,{\displaystyle u_{q}\cdot \cos {\theta },}
где θ{\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α{\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ{\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, uq{\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала uq{\displaystyle u_{q}}, формирует гармонические сигналы uα,uβ{\displaystyle u_{\alpha },u_{\beta }}, которые усилитель мощности (УМ) преобразует в фазные напряжения uA,uB{\displaystyle u_{A},u_{B}}. Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Достоинства и недостатки
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора)
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД выше 90 %)
- Большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
- Высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в конструкции ротора. Стоимость электропривода с ВД, однако, сопоставима со стоимостью аналогичного электропривода на основе ДПТ с независимым возбуждением (регулировочные характеристики такого двигателя и ВД сопоставимы). Вообще говоря, в вентильном двигателе может быть использован и ротор с электромагнитным возбуждением, однако это сопряжено с комплексом практических неудобств. В ряде случаев предпочтительным оказывается применение асинхронного двигателя с преобразователем частоты.
- Относительно сложная структура двигателя и управление им.
Конструкция
Конструктивно современные вентильные приводы состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка, и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
Ротор
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
Применение
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет.
Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и пр. Также, этот тип двигателей часто используется в двигателях квадрокоптеров.
См. также
Ссылки
Литература
- Герасимов В. Г., Кузнецов Э. В., Николаева О. В. Электротехника и электроника. Кн. 2. Электромагнитные устройства и электрические машины. — М.: Энергоатомиздат, 1997. — 288 с. — ISBN 5-283-05005-X.
Примечания
- ↑ Герман-Галкин С. Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК.. — СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- ↑ Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. — 2-ое изд., перераб. и доп.. — СПб: Энергоатомиздат, 1992. — 288 с. — ISBN 5-283-04544-7.
- ↑ Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — 272 с. — ISBN 5-7695-2306-9.
- ↑ Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие.. — СПб: СПбГЭТУ, 1997. — 64 с.
Погружные вентильные электродвигатели — Оборудование, услуги, материалы
Более 20 лет – именно столько насчитывает российская история создания, производства и внедрения погружных вентильных электродвигателей (ПВЭД) для УЭЦН.
Более 20 лет – именно столько насчитывает российская история создания, производства и внедрения погружных вентильных электродвигателей (ПВЭД) для УЭЦН.
История вопроса
Так, в октябре 1996 г участникам VI Всероссийской технической конференции «Производство и эксплуатация УЭЦН», проходившей в г. Альметьевске, в заводской испытательной скважине ОАО «Алнас» была впервые продемонстрирована установка с номинальной частотой вращения 6000 об/мин, с ПВЭД мощностью 45 кВт разработки «АЛНАС» и ЗАО «АВАНТО». При длине (двигатель+гидрозащита+насос) 5,6 м УЭЦН обеспечивала расход 140 м3/сут и напор 1200 м. Была изготовлена опытная партия (105 шт.) установок с трехпроводной и однопроводной линией питания для промысловых испытаний. Несмотря на положительные (в целом) результаты испытаний, программа производства ПВЭД была свернута в связи с недостаточной надёжностью существовавших в то время насосов.
В конце 1996 г по заказу ОАО «ЛУКОЙЛ» был изготовлен макетный образец ПВЭД разработки ОАО «АЭРОЭЛЕКТРИК». А 2 года спустя начаты эксплуатационные испытания опытных образцов УЭЦН с вентильным электродвигателем номинальной частотой вращения 3000 об/мин. К 2011 г электродвигатели производства «РИТЕК ИТЦ» с номинальной частотой вращения 3000 об/мин для УЭЦН и низкоскоростные ПВЭД для винтовых насосов произведены общим числом более 2000 шт.
В 1997 г была изготовлена, а в 1998 г была спущена в скважину УЭЦН с вентильным электродвигателем частотой вращения до 9000 об/мин мощностью 35 кВт разработки «КБ НЕФТЕМАШ». В настоящее время производятся мелкие партии УЭЦН «ЦУНАР» и «АКМ», работающие в диапазоне частот вращения 7 – 10 тыс об/мин. Всего было произведено около 180 различных модификаций таких установок.
«Борец» приступил к разработке и производству ПВЭД в 2004 г. Было изготовлено около 2000 таких изделий.
В открытой печати данных об изготовлении такого оборудования за пределами России и, тем более, об его эксплуатации найти не удалось. Конструкция двигателей BakerHughes и Shlumberger, как известно, не вентильная. Правда, есть информация, что для винтовых насосов одно из подразделений компании Shlumberger под названием Kudu выпускает вентильные тихоходные двигатели, но она требует проверки.
Если говорить вообще о зарубежной практике, то, к примеру, ООО «ПК Борец» производит вентильные двигатели и имеет представительства за рубежом.
Новометовские ПВЭДы
«НОВОМЕТ» приступил к разработке и внедрению ПВЭД в 2005 г. При этом была поставлена задача охвата всего диапазона габаритов от 81мм до 185 мм, частот вращения от 100 до 6000 об/мин и мощностей до 1,2 МВт. Очередность внедрения в производство определялась, естественно, спросом со стороны нефтяных компаний.
Первый погружной вентильный электродвигатель (ПВЭД) 117 габарита мощностью 400 кВт был изготовлен в 2006 г. За период до 2009 г освоена полная линейка мощностей ПВЭД — 117 на 3000 и 6000 об/мин, и подготовлено серийное производство ПВЭД 81 габарита максимальной мощностью одной секции 80 кВт. До 2012 г линейку продукции компании пополнили вентильные двигатели в габаритах 130 и 185 мм.
Таким образом, к 2013-му г задача освоения вентильных электродвигателей для УЭЦН средних и больших габаритов компанией НОВОМЕТ была успешно выполнена — количество этих машин превысило 25% от всех производимых ПЭД в компании.
Предстояло освоить малый и супермалый габариты. А именно – ПВЭД-81. В конце 2012 года было изготовлено менее 200 секций данного габарита, а к середине 2014 г данная цифра достигла почти 800.
Результаты расчётов по методике оценки пилотных проектов подтвердили среднюю наработку УЭЦН 3 габарита в пределах 540 суток. В декабре 2014 г на Самотлорском месторождении запущена установка УЭЦН3-160Э-2100/36-240 с первым секционным вентильным двигателем 81 габарита мощностью 125 кВт.
Опыт освоения УЭЦН 3 габарита выявил большую потребность нефтяной отрасли в малогабаритных установках для скважин с малым дебитом добычи.
Особенности конструкции
На роторе вентильного двигателя вместо короткозамкнутой «беличьей клетки» размещены постоянные магниты – именно этим данные машины в основном отличаются от асинхронных.
В вентильных электродвигателях «НОВОМЕТа» герметизация магнитов осуществляется специальными элементами конструкции, которые исключают их контакт с жидкостью внутри двигателя, и, следовательно, коррозию и «вспучивание» магнитов.
По сравнению с вентильными машинами других производителей, новометовские двигатели имеют увеличенный электромагнитный зазор, не содержат магнитомягких полюсов, следовательно, их подшипники подвергаются меньшим нагрузкам от сил одностороннего магнитного притяжения и обладают потенциально большим сроком службы. Статор изделий компаундирован, внутри обмотки размещён датчик температуры, на все габариты двигателей имеются системы ТМС.
Ротор электродвигателя на частоту вращения до 3000 об/мин имеет традиционную конструкцию со сплошным валом и подшипниками в расточке статора. В конструкции электродвигателей на частоты вращения выше 4000 об/мин применены инновационные решения, благодаря которым, а также предварительной балансировке пакетов удается получить низкий уровень вибрации как при первоначальной сборке электродвигателя, так и при замене части пакетов ротора.
Преимущества
Вентильные электродвигатели обладают рядом технических и эксплуатационных преимуществ по сравнению с асинхронными.
Прежде всего, ПВЭД имеют увеличенный КПД (88-94% в зависимости от диаметра) и обусловленные им пониженное удельное тепловыделение на единицу мощности и низкое энергопотребление. Это позволяет снизить массу и габариты активной части двигателя примерно в 2 раза. Так, ПВЭД 117-го габарита в односекционном исполнении при 3000 об/мин выдает мощность до 310 кВт, а при 6000 об/мин — до 420 кВт.
При необходимости вентильные двигатели могут быть выполнены с высоким коэффициентом мощности, в том числе — равным 1.
Возможность регулирования частоты вращения и контроля параметров позволяет оптимизировать отбор жидкости из скважин и сократить номенклатуру двигателей. Диапазоны регулирования частоты вращения составляют 100-500, 500-1500, 1500-4200 и 4000-6000, 5000-8500 об/мин.
ПВЭДы могут применяться:
— в скважинах осложненного фонда,
— при добыче вязкой нефти,
— при нестабильной подаче,
— в малодебитных скважинах,
— в скважинах, вводимых после гидроразрыва пласта (ГРП) и после других операций по интенсификации добычи нефти.
Тонкое вентильное решение
В 2014 г компанией разработан вентильный двигатель для установки 2 габарита ЭЦН2-50-2000 с наружным диаметром корпуса ПВЭД 55 мм. А в 2016 г компания вывела на рынок революционную технологию ColibriESP, составной частью которой и являлась данная разработка.
На ней стоит остановиться подробней.
Погружной, маслозаполненый, вентильный электродвигатель содержит от 1 до 3 унифицированных секций. Все секции — обмотаны проводом одного диаметра, это позволило сделать их универсальными и применять в любом сочетании, в зависимости от требуемой мощности ПЭД. Длина одной модуль-секции ПЭД составляет 2, 3 и 4 метра, мощность изготавливаемых секций электродвигателей принята 15, 25 и 35 кВт соответственно. Максимальная суммарная мощность электродвигателя — 105 кВт — ограничена сечением выводных проводов, соединяющих секции между собой. Номинальные токи до 28 А и напряжение до 3000 кВ позволило получить минимальный перегрев электродвигателя – 25° С.
Мощность первого изготовленного двухсекционного двигателя для 2 габарита составила 70 кВт, чего достичь в корпусе 55 мм еще пару лет назад было практически невозможно. В данном габарите кроме магнитопровода, обмотки и магнитов размещены: вал с трансмисией, соединение токоведущих выводных проводов, а также быстроразъемное бесфланцевое соединение секций ЭЦН. КПД двигателя составил 85%.
Разработка уникальна, аналогов в мире не существует.
Энергоэффективность
Важнейшим преимуществом вентильных двигателей является то, что они являются составной частью энергоэффективных установок.
Повышение энергоэффективности добычи нефти остается одной из наиболее актуальных задач не только в России, но и в мире. Согласно статистике, доля затрат нефтяных компаний на электроэнергию в структуре себестоимости добычи увеличивается в среднем на 3-4% в год. При этом более 50% расходов на электроэнергию приходится на подъем скважинной жидкости механизированным способом. Только в России энергопотребление в сегменте механизированной добычи нефти составляет не менее 28,3 млрд кВт-ч в год.
Для решения проблемы высокого энергопотребления инженеры АО «Новомет-Пермь» разработали линейку энергоэффективных УЭЦН с максимальным КПД до 79% при номинальной подаче до 3000 м3/сут.
Предлагаемая линейка оборудования включает УЭЦН с высокооборотными (до 5820 об/мин) погружными вентильными электродвигателями. От серийно выпускаемых моделей данные установки отличаются меньшими габаритами, более высоким КПД и повышенными напорными характеристиками.
В качестве привода в данных установках используется серийно производимый погружной вентильный электродвигатель серии ПВЭДН в габаритных группах 81, 103, 117, 130 и 185 мм. Трехфазный и маслонаполненный, он представлен в двух вариантах исполнения: одно- и двухсекционном. В его конструкции применяется ротор на базе четырехполюсного магнита, изготовленного из высокотемпературных магнитотвердых спеченных материалов.
Энергетический расчет показывает, что энергопотери в вентильном двигателе примерно в два раза меньше, чем в асинхронном. При использовании установки с вентильным двигателем наблюдается не только снижение энергопотребления в узлах УЭЦН, но и снижение потерь в кабеле, станции управления и масляных трансформаторах погружных насосов (ТМПН).
Проведенные на стендах-скважинах ОАО «ОКБ БН КОННАС» сравнительные испытания серийной установки и энергоэффективной установки с вентильным двигателем подтвердили, что применение ПВЭДН позволяет на 24% снизить энергопотребление УЭЦН. Испытания проводились в присутствии представителей компаний-заказчиков и независимых наблюдателей.
Согласно ГОСТ Р 56624-2015, все вентильные электродвигатели производства АО «Новомет-Пермь» соответствуют классу энергоэффективности Е2. К этому классу относятся электродвигатели с высоким КПД, у которых суммарные потери мощности не менее чем на 40% (Ке=0,4) меньше суммарных потерь мощности стандартных электродвигателей с аналогичными мощностью и частотой вращения.
Внедрение УЭЦН с вентильными электродвигателями в России
Начиная с 2009 г, установки с вентильными электродвигателями успешно применяются на месторождениях многих крупных российских нефтяных компаний. В качестве примера можно привести результаты промышленного внедрения оборудования на объектах ПАО «Газпром нефть» и еще одной крупной нефтяной компании в период 2013-2014 г.
В рамках сервисного (прокатного) проекта ООО «Новомет-Сервис» в АО «Газпромнефть-Ноябрьскнефтегаз» и его структурном подразделении (Филиале) «Газпромнефть-Муравленко» было внедрено соответственно 630 и 423 ед. ПВЭД. Помимо стоимости проката УЭЦН в сервисных контрактах были закреплены ключевые показатели эффективности, предусматривающие снижение удельного расхода электроэнергии (УРЭ) на добычу тонны жидкости и ежегодное увеличение МРП и наработки на отказ (НнО). После внедрения оборудования в АО «Газпромнефть-Ноябрьскнефтегаз» МРП установок увеличился с 598 до 761 сут, в «Газпромнефть-Муравленко» – с 428 до 584 суток.
Общая наработка энергоэффективных УЭЦН на фонде АО «Газпромнефть-Ноябрьскнефтегаз» к настоящему времени превысила наработку как серийно выпускаемых установок производства АО «Новомет-Пермь», так и аналогов, предлагаемых другими отечественными заводами-изготовителями.
Внедрение ПВЭД производства «Новомет» за рубежом
Вентильные электродвигатели пермской компании работают в Аргентине, Канаде, Колумбии, Эквадоре и других странах.
Первый монтаж УЭЦН с вентильным двигателем состоялся в Египте 6 февраля 2012 г. Всего ПВЭД производства АО «Новомет-Пермь» было внедрено в 12 странах в количестве 670 двигателей. Из них на начало 2018 г в работе находилось 382 установки со средней наработкой 293 суток. Отметим, что максимальная наработка в Колумбии доходит до 1921 суток.

Ведущие мировые нефтяные компании проявляют серьезный интерес как к новометовскому оборудованию в целом, так и конкретно — к его вентильным электродвигателям. В 2017 г пермская компания заключила соглашение с концерном Statoil Petroleum AS (Норвегия) по НИОКР на разработку высоконадежной УЭЦН с вентильным электродвигателем для применения на офшоре.
Вентильная революция
Благодаря появлению на рынке вентильных двигателей произошел существенный рывок в механизированной добыче в целом: компании «Новомет» удалось вывести на рынок целый ряд новых технологий:
— Высокооборотные УЭЦН с подачей до 1600 м3/сут, при этом обладающих КПД на 40% выше, чем у серийных, до 2-х раз компактнее.
— Малогабаритные УЭЦН для спуска в боковой ствол диаметром 102 мм, что даёт прирост добычи в среднем 15 м3/сут.
— УЭЦН сверхмалого габарита для эксплуатации внутри НКТ 73 мм, спускаемую на грузонесущем кабеле. На ее монтаж требуется в 5-7 раз меньше времени, чем серийной УЭЦН.
— Установки винтового насоса с нижним приводом, а также насосы нового типа – объемно-роторные. Установки приводятся в действие низкооборотным двигателем и используются для добычи вязкой нефти.
В стадии подготовки находятся решения для эксплуатации в условиях сверхвысоких температур, а также установки со сверхвысокой надежностью – обе технологии выполнены на базе вентильных приводов.
Номенклатура вентильных ПЭД производства АО «Новомет-Пермь»

Сегодня стало очевидно, что конструкция асинхронных электродвигателей свои возможности по увеличению КПД и повышению коэффициента мощности исчерпала, и будущее однозначно за вентильными электродвигателями.
Использованная литература:
— Санталов А.М. Вентильные электродвигатели для погружных электронасосов. // Сборник докладов VI Всероссийской технической конференции «Производство и эксплуатация УЭЦН». Альметьевск, 1996.
— Павленко В.И., Гинзбург М.Я. Тенденция замены ПЭД на ВД: мир последовал за инновацией Лукойла. // Нефтегазовая вертикаль 2010, №20.
— Шенгур Н.В., Иванов А.А. Мифы и реальности внедрения вентильного электродвигателя в УЭЦН. // Инженерная практика. 2011, №3.
— Слепченко С.Д. Математика прогноза // Нефтегазовая вертикаль. 2006, №12, с.48-51
Вентильный двигатель — Википедия (с комментариями)
Материал из Википедии — свободной энциклопедии
Вентильный электродвигатель (ВД) — это замкнутая электромеханическая система, состоящая из синхронной машины с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока(обращенный!!), в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией.
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений[1]. Структура БДПТ проще чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесконтактным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно рассматриваются в составе электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока (ДПТ), которые характеризуются рядом изъянов, связанных со щёточно-коллекторным узлом (ЩКУ), таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и проч. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
Описание и принцип работы[2]
На входы преобразователя координат (ПК) поступают напряжения постоянного тока <math> u_q </math>, действие которого аналогично напряжению якоря двигателя постоянного тока, и <math> u_d </math>, аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы <math> u_d, u_q </math>, представляют собой проекции вектора напряжения управления <math> \vec{U_y} = \{ u_d, u_q \} </math> на оси вращающейся системы координат <math> \{ d,q \} </math>, связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций <math> u_d, u_q </math> в проекции <math> u_\alpha, u_\beta </math> неподвижной системы координат <math> \{ \alpha, \beta \} </math>, связанной со статором .
Как правило, в системах управления электропривода задаётся <math> u_d = 0 </math>[3], при этом уравнения преобразования координат принимают вид[4]:
<math> u_\alpha = — u_q \cdot \sin{\theta}, </math>
<math> u_\beta = </math> <math> u_q \cdot \cos{\theta}, </math>
где <math> \theta </math> — угол поворота ротора (и системы вращающихся координат) относительно оси <math> \alpha </math> неподвижной системы координат. Для измерения мгновенного значения угла <math> \theta </math> на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, <math> u_q </math> является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала <math> u_q </math>, формирует гармонические сигналы <math> u_\alpha, u_\beta </math>, которые усилитель мощности (УМ) преобразует в фазные напряжения <math> u_A, u_B </math>. Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях, за счёт удаления дорогостоящего и, зачастую, громоздкого датчика положения, уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Применение
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет. Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и проч.
Достоинства и недостатки
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора)
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД выше 90 %)
- Большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
- Высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в конструкции ротора. Стоимость электропривода с ВД, однако, сопоставима со стоимостью аналогичного электропривода на основе ДПТ с независимым возбуждением (регулировочные характеристики такого двигателя и ВД сопоставимы). Вообще говоря, в вентильном двигателе может быть использован и ротор с электромагнитным возбуждением, однако это сопряжено с комплексом практических неудобств. В ряде случаев предпочтительным оказывается применение асинхронного двигателя с преобразователем частоты.
- Относительно сложная структура двигателя и управление им.
Конструкция
Конструктивно современные вентильные привода состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Упрощённо датчик показан на рис. 1, где маска изображена серым цветом, а светодиоды — жёлтым. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
См. также
Напишите отзыв о статье «Вентильный двигатель»
Примечания
- ↑ 1 2 Герман-Галкин С. Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК.. — СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- ↑ Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. — 2-ое изд., перераб. и доп.. — СПб: Энергоатомиздат, 1992. — 288 с. — ISBN 5-283-04544-7.
- ↑ Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — 272 с. — ISBN 5-7695-2306-9.
- ↑ Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие.. — СПб: СПбГЭТУ, 1997. — 64 с.
Ссылки
- [www.gaw.ru/html.cgi/txt/app/micros/avr/AVR440.htm AVR440: Управление двухфазным бесколлекторным электродвигателем постоянного тока без датчиков]
- [www.unilib.neva.ru/dl/059/CHAPTER5/Chapter5.html ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА — 5.4. Вентильные двигатели ]
- [www.imafania.narod.ru/bldc.htm Про бесколлекторный двигатель и использование шагового двигателя в качестве бесколлекторного]
- [www.elektromehanicka.narod.ru/ Конструкции электрических машин]
- [tekhnosfera.com/view/10273/a#?page=6 Структура вентильного двигателя]
- [tekhnosfera.com/view/9597/a#?page=12 Модель трёхфазного вентильного двигателя]
- [www.avislab.com/blog/brushless01 Бесколлекторные двигатели постоянного тока. Что это такое?]
- [www.freescale.com/files/product/doc/AN1931.pdf Электропривод с вентильным двигателем в западном понимании (см. Fig. 3.6)]
Отрывок, характеризующий Вентильный двигатель
– Это наш пластун. Я его посылал языка взять.– Ах, да, – сказал Петя с первого слова Денисова, кивая головой, как будто он все понял, хотя он решительно не понял ни одного слова.
Тихон Щербатый был один из самых нужных людей в партии. Он был мужик из Покровского под Гжатью. Когда, при начале своих действий, Денисов пришел в Покровское и, как всегда, призвав старосту, спросил о том, что им известно про французов, староста отвечал, как отвечали и все старосты, как бы защищаясь, что они ничего знать не знают, ведать не ведают. Но когда Денисов объяснил им, что его цель бить французов, и когда он спросил, не забредали ли к ним французы, то староста сказал, что мародеры бывали точно, но что у них в деревне только один Тишка Щербатый занимался этими делами. Денисов велел позвать к себе Тихона и, похвалив его за его деятельность, сказал при старосте несколько слов о той верности царю и отечеству и ненависти к французам, которую должны блюсти сыны отечества.
– Мы французам худого не делаем, – сказал Тихон, видимо оробев при этих словах Денисова. – Мы только так, значит, по охоте баловались с ребятами. Миродеров точно десятка два побили, а то мы худого не делали… – На другой день, когда Денисов, совершенно забыв про этого мужика, вышел из Покровского, ему доложили, что Тихон пристал к партии и просился, чтобы его при ней оставили. Денисов велел оставить его.
Тихон, сначала исправлявший черную работу раскладки костров, доставления воды, обдирания лошадей и т. п., скоро оказал большую охоту и способность к партизанской войне. Он по ночам уходил на добычу и всякий раз приносил с собой платье и оружие французское, а когда ему приказывали, то приводил и пленных. Денисов отставил Тихона от работ, стал брать его с собою в разъезды и зачислил в казаки.
Тихон не любил ездить верхом и всегда ходил пешком, никогда не отставая от кавалерии. Оружие его составляли мушкетон, который он носил больше для смеха, пика и топор, которым он владел, как волк владеет зубами, одинаково легко выбирая ими блох из шерсти и перекусывая толстые кости. Тихон одинаково верно, со всего размаха, раскалывал топором бревна и, взяв топор за обух, выстрагивал им тонкие колышки и вырезывал ложки. В партии Денисова Тихон занимал свое особенное, исключительное место. Когда надо было сделать что нибудь особенно трудное и гадкое – выворотить плечом в грязи повозку, за хвост вытащить из болота лошадь, ободрать ее, залезть в самую середину французов, пройти в день по пятьдесят верст, – все указывали, посмеиваясь, на Тихона.
– Что ему, черту, делается, меренина здоровенный, – говорили про него.
Один раз француз, которого брал Тихон, выстрелил в него из пистолета и попал ему в мякоть спины. Рана эта, от которой Тихон лечился только водкой, внутренне и наружно, была предметом самых веселых шуток во всем отряде и шуток, которым охотно поддавался Тихон.
– Что, брат, не будешь? Али скрючило? – смеялись ему казаки, и Тихон, нарочно скорчившись и делая рожи, притворяясь, что он сердится, самыми смешными ругательствами бранил французов. Случай этот имел на Тихона только то влияние, что после своей раны он редко приводил пленных.
Тихон был самый полезный и храбрый человек в партии. Никто больше его не открыл случаев нападения, никто больше его не побрал и не побил французов; и вследствие этого он был шут всех казаков, гусаров и сам охотно поддавался этому чину. Теперь Тихон был послан Денисовым, в ночь еще, в Шамшево для того, чтобы взять языка. Но, или потому, что он не удовлетворился одним французом, или потому, что он проспал ночь, он днем залез в кусты, в самую середину французов и, как видел с горы Денисов, был открыт ими.
Поговорив еще несколько времени с эсаулом о завтрашнем нападении, которое теперь, глядя на близость французов, Денисов, казалось, окончательно решил, он повернул лошадь и поехал назад.
– Ну, бг’ат, тепег’ь поедем обсушимся, – сказал он Пете.
Подъезжая к лесной караулке, Денисов остановился, вглядываясь в лес. По лесу, между деревьев, большими легкими шагами шел на длинных ногах, с длинными мотающимися руками, человек в куртке, лаптях и казанской шляпе, с ружьем через плечо и топором за поясом. Увидав Денисова, человек этот поспешно швырнул что то в куст и, сняв с отвисшими полями мокрую шляпу, подошел к начальнику. Это был Тихон. Изрытое оспой и морщинами лицо его с маленькими узкими глазами сияло самодовольным весельем. Он, высоко подняв голову и как будто удерживаясь от смеха, уставился на Денисова.
– Ну где пг’опадал? – сказал Денисов.
– Где пропадал? За французами ходил, – смело и поспешно отвечал Тихон хриплым, но певучим басом.
– Зачем же ты днем полез? Скотина! Ну что ж, не взял?..
– Взять то взял, – сказал Тихон.
– Где ж он?
– Да я его взял сперва наперво на зорьке еще, – продолжал Тихон, переставляя пошире плоские, вывернутые в лаптях ноги, – да и свел в лес. Вижу, не ладен. Думаю, дай схожу, другого поаккуратнее какого возьму.
– Ишь, шельма, так и есть, – сказал Денисов эсаулу. – Зачем же ты этого не пг’ивел?
– Да что ж его водить то, – сердито и поспешно перебил Тихон, – не гожающий. Разве я не знаю, каких вам надо?
– Эка бестия!.. Ну?..
– Пошел за другим, – продолжал Тихон, – подполоз я таким манером в лес, да и лег. – Тихон неожиданно и гибко лег на брюхо, представляя в лицах, как он это сделал. – Один и навернись, – продолжал он. – Я его таким манером и сграбь. – Тихон быстро, легко вскочил. – Пойдем, говорю, к полковнику. Как загалдит. А их тут четверо. Бросились на меня с шпажками. Я на них таким манером топором: что вы, мол, Христос с вами, – вскрикнул Тихон, размахнув руками и грозно хмурясь, выставляя грудь.
– То то мы с горы видели, как ты стречка задавал через лужи то, – сказал эсаул, суживая свои блестящие глаза.
Пете очень хотелось смеяться, но он видел, что все удерживались от смеха. Он быстро переводил глаза с лица Тихона на лицо эсаула и Денисова, не понимая того, что все это значило.
– Ты дуг’ака то не представляй, – сказал Денисов, сердито покашливая. – Зачем пег’вого не пг’ивел?
Тихон стал чесать одной рукой спину, другой голову, и вдруг вся рожа его растянулась в сияющую глупую улыбку, открывшую недостаток зуба (за что он и прозван Щербатый). Денисов улыбнулся, и Петя залился веселым смехом, к которому присоединился и сам Тихон.
– Да что, совсем несправный, – сказал Тихон. – Одежонка плохенькая на нем, куда же его водить то. Да и грубиян, ваше благородие. Как же, говорит, я сам анаральский сын, не пойду, говорит.
– Экая скотина! – сказал Денисов. – Мне расспросить надо…
– Да я его спрашивал, – сказал Тихон. – Он говорит: плохо зн аком. Наших, говорит, и много, да всё плохие; только, говорит, одна названия. Ахнете, говорит, хорошенько, всех заберете, – заключил Тихон, весело и решительно взглянув в глаза Денисова.
– Вот я те всыплю сотню гог’ячих, ты и будешь дуг’ака то ког’чить, – сказал Денисов строго.
– Да что же серчать то, – сказал Тихон, – что ж, я не видал французов ваших? Вот дай позатемняет, я табе каких хошь, хоть троих приведу.
– Ну, поедем, – сказал Денисов, и до самой караулки он ехал, сердито нахмурившись и молча.
Тихон зашел сзади, и Петя слышал, как смеялись с ним и над ним казаки о каких то сапогах, которые он бросил в куст.
Когда прошел тот овладевший им смех при словах и улыбке Тихона, и Петя понял на мгновенье, что Тихон этот убил человека, ему сделалось неловко. Он оглянулся на пленного барабанщика, и что то кольнуло его в сердце. Но эта неловкость продолжалась только одно мгновенье. Он почувствовал необходимость повыше поднять голову, подбодриться и расспросить эсаула с значительным видом о завтрашнем предприятии, с тем чтобы не быть недостойным того общества, в котором он находился.
Посланный офицер встретил Денисова на дороге с известием, что Долохов сам сейчас приедет и что с его стороны все благополучно.
Денисов вдруг повеселел и подозвал к себе Петю.
– Ну, г’асскажи ты мне пг’о себя, – сказал он.
Петя при выезде из Москвы, оставив своих родных, присоединился к своему полку и скоро после этого был взят ординарцем к генералу, командовавшему большим отрядом. Со времени своего производства в офицеры, и в особенности с поступления в действующую армию, где он участвовал в Вяземском сражении, Петя находился в постоянно счастливо возбужденном состоянии радости на то, что он большой, и в постоянно восторженной поспешности не пропустить какого нибудь случая настоящего геройства. Он был очень счастлив тем, что он видел и испытал в армии, но вместе с тем ему все казалось, что там, где его нет, там то теперь и совершается самое настоящее, геройское. И он торопился поспеть туда, где его не было.
Когда 21 го октября его генерал выразил желание послать кого нибудь в отряд Денисова, Петя так жалостно просил, чтобы послать его, что генерал не мог отказать. Но, отправляя его, генерал, поминая безумный поступок Пети в Вяземском сражении, где Петя, вместо того чтобы ехать дорогой туда, куда он был послан, поскакал в цепь под огонь французов и выстрелил там два раза из своего пистолета, – отправляя его, генерал именно запретил Пете участвовать в каких бы то ни было действиях Денисова. От этого то Петя покраснел и смешался, когда Денисов спросил, можно ли ему остаться. До выезда на опушку леса Петя считал, что ему надобно, строго исполняя свой долг, сейчас же вернуться. Но когда он увидал французов, увидал Тихона, узнал, что в ночь непременно атакуют, он, с быстротою переходов молодых людей от одного взгляда к другому, решил сам с собою, что генерал его, которого он до сих пор очень уважал, – дрянь, немец, что Денисов герой, и эсаул герой, и что Тихон герой, и что ему было бы стыдно уехать от них в трудную минуту.
Уже смеркалось, когда Денисов с Петей и эсаулом подъехали к караулке. В полутьме виднелись лошади в седлах, казаки, гусары, прилаживавшие шалашики на поляне и (чтобы не видели дыма французы) разводившие красневший огонь в лесном овраге. В сенях маленькой избушки казак, засучив рукава, рубил баранину. В самой избе были три офицера из партии Денисова, устроивавшие стол из двери. Петя снял, отдав сушить, свое мокрое платье и тотчас принялся содействовать офицерам в устройстве обеденного стола.
Через десять минут был готов стол, покрытый салфеткой. На столе была водка, ром в фляжке, белый хлеб и жареная баранина с солью.
Сидя вместе с офицерами за столом и разрывая руками, по которым текло сало, жирную душистую баранину, Петя находился в восторженном детском состоянии нежной любви ко всем людям и вследствие того уверенности в такой же любви к себе других людей.
– Так что же вы думаете, Василий Федорович, – обратился он к Денисову, – ничего, что я с вами останусь на денек? – И, не дожидаясь ответа, он сам отвечал себе: – Ведь мне велено узнать, ну вот я и узнаю… Только вы меня пустите в самую… в главную. Мне не нужно наград… А мне хочется… – Петя стиснул зубы и оглянулся, подергивая кверху поднятой головой и размахивая рукой.
– В самую главную… – повторил Денисов, улыбаясь.
– Только уж, пожалуйста, мне дайте команду совсем, чтобы я командовал, – продолжал Петя, – ну что вам стоит? Ах, вам ножик? – обратился он к офицеру, хотевшему отрезать баранины. И он подал свой складной ножик.
Офицер похвалил ножик.
– Возьмите, пожалуйста, себе. У меня много таких… – покраснев, сказал Петя. – Батюшки! Я и забыл совсем, – вдруг вскрикнул он. – У меня изюм чудесный, знаете, такой, без косточек. У нас маркитант новый – и такие прекрасные вещи. Я купил десять фунтов. Я привык что нибудь сладкое. Хотите?.. – И Петя побежал в сени к своему казаку, принес торбы, в которых было фунтов пять изюму. – Кушайте, господа, кушайте.
– А то не нужно ли вам кофейник? – обратился он к эсаулу. – Я у нашего маркитанта купил, чудесный! У него прекрасные вещи. И он честный очень. Это главное. Я вам пришлю непременно. А может быть еще, у вас вышли, обились кремни, – ведь это бывает. Я взял с собою, у меня вот тут… – он показал на торбы, – сто кремней. Я очень дешево купил. Возьмите, пожалуйста, сколько нужно, а то и все… – И вдруг, испугавшись, не заврался ли он, Петя остановился и покраснел.
Он стал вспоминать, не сделал ли он еще каких нибудь глупостей. И, перебирая воспоминания нынешнего дня, воспоминание о французе барабанщике представилось ему. «Нам то отлично, а ему каково? Куда его дели? Покормили ли его? Не обидели ли?» – подумал он. Но заметив, что он заврался о кремнях, он теперь боялся.
«Спросить бы можно, – думал он, – да скажут: сам мальчик и мальчика пожалел. Я им покажу завтра, какой я мальчик! Стыдно будет, если я спрошу? – думал Петя. – Ну, да все равно!» – и тотчас же, покраснев и испуганно глядя на офицеров, не будет ли в их лицах насмешки, он сказал:
– А можно позвать этого мальчика, что взяли в плен? дать ему чего нибудь поесть… может…
– Да, жалкий мальчишка, – сказал Денисов, видимо, не найдя ничего стыдного в этом напоминании. – Позвать его сюда. Vincent Bosse его зовут. Позвать.
– Я позову, – сказал Петя.
– Позови, позови. Жалкий мальчишка, – повторил Денисов.
Петя стоял у двери, когда Денисов сказал это. Петя пролез между офицерами и близко подошел к Денисову.
– Позвольте вас поцеловать, голубчик, – сказал он. – Ах, как отлично! как хорошо! – И, поцеловав Денисова, он побежал на двор.
– Bosse! Vincent! – прокричал Петя, остановясь у двери.
– Вам кого, сударь, надо? – сказал голос из темноты. Петя отвечал, что того мальчика француза, которого взяли нынче.
– А! Весеннего? – сказал казак.
Имя его Vincent уже переделали: казаки – в Весеннего, а мужики и солдаты – в Висеню. В обеих переделках это напоминание о весне сходилось с представлением о молоденьком мальчике.
– Он там у костра грелся. Эй, Висеня! Висеня! Весенний! – послышались в темноте передающиеся голоса и смех.
– А мальчонок шустрый, – сказал гусар, стоявший подле Пети. – Мы его покормили давеча. Страсть голодный был!
В темноте послышались шаги и, шлепая босыми ногами по грязи, барабанщик подошел к двери.
– Ah, c’est vous! – сказал Петя. – Voulez vous manger? N’ayez pas peur, on ne vous fera pas de mal, – прибавил он, робко и ласково дотрогиваясь до его руки. – Entrez, entrez. [Ах, это вы! Хотите есть? Не бойтесь, вам ничего не сделают. Войдите, войдите.]
– Merci, monsieur, [Благодарю, господин.] – отвечал барабанщик дрожащим, почти детским голосом и стал обтирать о порог свои грязные ноги. Пете многое хотелось сказать барабанщику, но он не смел. Он, переминаясь, стоял подле него в сенях. Потом в темноте взял его за руку и пожал ее.
Обсуждение:Вентильный электродвигатель — Википедия
Материал из Википедии — свободной энциклопедии
Вентильный двигатель и бесколлекторный двигатель постоянного тока[править код]
Перенаправление статьи «вентильный двигатель» (ВД) на статью «бесколлекторный двигатель постоянного тока» (БДПТ) некорректно.
1. В составе первого используется синхронная машина с постоянными магнитами, имеющая синусоидальную противо-ЭДС (PMSM). В составе второго используется машина, имеющая трапецеидальную противо-ЭДС ( BLDC).
2. Принцип действия ВД и БДПТ несколько отличаются. Структуры — тоже. ВД в качестве датчика положения использует синусно-косинусный датчик угла или же энкодер. БДПТ в качестве ДПР использует элементы Холла, катушки насыщения, либо другие элементы, дискретного типа и не требует наличия преобразователя координат. ВД без преобразователя координат функционировать не может.
3. В западной литературе BLDC и PMSM это разные вещи. http://www.technosoft.ro/KB/index.php?/article/AA-00332/0/The-difference-between-the-PMSM-BLDC-and-BLAC-motors-cm.html
Таким же образом понимает эти термины и ведущий специалист по ВД — профессор Щецинского университета (Польша)и БГТУ Военмех (Санкт-петербург)С.Г.Герман-Галкин. (http://gendocs.ru/v26523/?cc=9)
«Вентильные двигатели – это устройства, в которых магнитоэлектрическая синхронная машина с синусоидальным распределением магнитного поля в зазоре включена в замкнутую систему с использованием датчика положения ротора (ДПР), преобразователя координат (ПК) и автономного инвертора (АИ). Форма магнитного поля в зазоре обуславливает способ формирования напряжения (тока) на выходе АИ. В ВД на выходе инвертора необходимо формировать синусоидальный ток, что достигается за счет синусоидальной широтно – импульсной модуляции в инверторе.»
«Бесконтактные двигатели постоянного тока – это устройства, в которых магнитоэлектрическая синхронная машина с трапецеидальным распределением магнитного поля в зазоре включена в замкнутую систему с использованием датчика положения ротора (ДПР) и полупроводникового коммутатора (КП). В данном устройстве на выходе КП и соответственно на обмотках синхронной машины формируется прямоугольное напряжение. В качестве датчиков положения ротора в БДПТ используются импульсные датчики (электромагнитные, датчики Холла). Число таких датчиков равно числу фаз статора двигателя.»
4. Проблема в том, что англоязычные источники в интернет не всегда точно отражают это различие. В частности, статья в англоязычной wiki по BLDC имеется, а по PMSM Drive — отсутствует. Это и могло ввести в заблуждение неискушенного пользователя.
Dim 16:21, 26 ноября 2012 (UTC)
Вентильный двигатель — Википедия. Что такое Вентильный двигатель
 Рис. 1. Принцип работы трёхфазного вентильного двигателя
Рис. 1. Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесконтактным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
Описание и принцип работы[2]
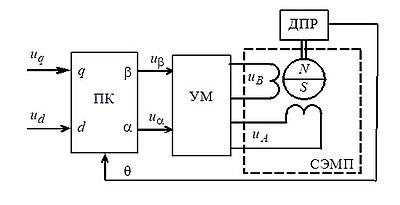 Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,
Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности,СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока uq{\displaystyle u_{q}}, действие которого аналогично напряжению якоря двигателя постоянного тока, и ud{\displaystyle u_{d}}, аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы ud,uq{\displaystyle u_{d},u_{q}}, представляют собой проекции вектора напряжения управления Uy→={ud,uq}{\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат {d,q}{\displaystyle \{d,q\}}, связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций ud,uq{\displaystyle u_{d},u_{q}} в проекции uα,uβ{\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат {α,β}{\displaystyle \{\alpha ,\beta \}}, связанной со статором.
Как правило, в системах управления электропривода задаётся ud=0{\displaystyle u_{d}=0}[3], при этом уравнения преобразования координат принимают вид[4]:
uα=−uq⋅sinθ,{\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
uβ={\displaystyle u_{\beta }=} uq⋅cosθ,{\displaystyle u_{q}\cdot \cos {\theta },}
где θ{\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α{\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ{\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, uq{\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала uq{\displaystyle u_{q}}, формирует гармонические сигналы uα,uβ{\displaystyle u_{\alpha },u_{\beta }}, которые усилитель мощности (УМ) преобразует в фазные напряжения uA,uB{\displaystyle u_{A},u_{B}}. Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Достоинства и недостатки
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора)
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД выше 90 %)
- Большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
- Высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в конструкции ротора. Стоимость электропривода с ВД, однако, сопоставима со стоимостью аналогичного электропривода на основе ДПТ с независимым возбуждением (регулировочные характеристики такого двигателя и ВД сопоставимы). Вообще говоря, в вентильном двигателе может быть использован и ротор с электромагнитным возбуждением, однако это сопряжено с комплексом практических неудобств. В ряде случаев предпочтительным оказывается применение асинхронного двигателя с преобразователем частоты.
- Относительно сложная структура двигателя и управление им.
Конструкция
Конструктивно современные вентильные привода состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка, и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
Ротор
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
Применение
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет.
Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и пр. Также, этот тип двигателей часто используется в двигателях квадрокоптеров.
См. также
Ссылки
Литература
- Герасимов В. Г., Кузнецов Э. В., Николаева О. В. Электротехника и электроника. Кн. 2. Электромагнитные устройства и электрические машины. — М.: Энергоатомиздат, 1997. — 288 с. — ISBN 5-283-05005-X.
Примечания
- ↑ Герман-Галкин С. Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК.. — СПб.: КОРОНА-Век, 2008. — 368 с. — ISBN 978-5-903383-39-9.
- ↑ Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. — 2-ое изд., перераб. и доп.. — СПб: Энергоатомиздат, 1992. — 288 с. — ISBN 5-283-04544-7.
- ↑ Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — 272 с. — ISBN 5-7695-2306-9.
- ↑ Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие.. — СПб: СПбГЭТУ, 1997. — 64 с.
Вентильный реактивный электродвигатель — это… Что такое Вентильный реактивный электродвигатель?
Сечение ВРД с 8 статорными и 6 роторными полюсами Сечение ВРД с 6 статорными и 4 роторными полюсами Принцип работы ВРД (SRM)Вентильный реактивный электродвигатель (ВРД) — это синхронная машина.
Достоинства
Вентильные реактивные электродвигатели/генераторы имеют следующие достоинства:
- Простая конструкция
Ротор и статор выполнены в виде пакетов листового магнитомягкого материала. На роторе ВРД отсутствуют обмотки и постоянные магниты. Фазные обмотки находятся только на статоре. Для уменьшения трудоемкости катушки обмотки якоря могут изготавливаться отдельно, а затем надеваться на полюсы статора.
- Высокая ремонтопригодность
Простота обмотки якоря повышает ремонтопригодность ВРД/ВРГ, т.к. для ремонта достаточно сменить вышедшую из строя катушку.
- Отсутствие механического коммутатора
Управление электромеханическим преобразователем электропривода/генератора осуществляется с помощью высокоэффективных силовых полупроводниковых элементов — IGBT или MOSFET (HEXFET) транзисторов, надежность которых существенно превышает надежность любых механических деталей, например: коллекторов, щеток, подшипников.
- Отсутствие постоянных магнитов
ВРД/ВРГ не содержит постоянных магнитов ни на роторе, ни на статоре, при этом он успешно конкурирует по характеристикам с вентильными электрическими двигателями с постоянными магнитами (ВЭДПМ). В среднем, при одинаковых электрических и весогабаритных характеристиках ВРД/ВРГ имеет в 4 раза меньшую стоимость, значительно большую надежность, более широкий диапазон частот вращения, более широкий диапазон рабочих температур. Конструктивно, по сравнению с ВЭДПМ, ВРД/ВРГ не имеет ограничения по мощности (практически, мощность ВЭДПМ ограничивается пределом около 20-40 кВТ). ВЭДПМ требуют защиты от металлической пыли, боятся перегрева и сильных электромагнитных полей, в случае короткого замыкания обмотки превращаются в самовозгорающуюся систему. Вентильные реактивные электродвигатели/генераторы свободны от всех этих недостатков.
- Малое количество меди
На изготовление ВРД/ВРГ требуется в среднем 2-3 раза меньше меди, чем для коллекторного электродвигателя такой же мощности, и в 1,3 раза меньше меди, чем для асинхронного электродвигателя.
- Tепловыделение происходит в основном только на статоре, при этом легко обеспечивается герметичная конструкция, воздушное или водяное охлаждение
В рабочем режиме не требуется охлаждение ротора. Для охлаждения ВРД/ВРГ достаточно использовать наружную поверхность статора.
- Высокие массогабаритные характеристики
В большинстве случаев ВРД/ВРГ может быть выполнен с полым ротором. Толщина спинки ротора при этом должна быть не менее половины ширины полюса. Подбором количества полюсов статора и ротора могут быть оптимизированы массогабаритные характеристики электродвигателя/генератора, его мощность при заданном моменте и диапазоне частоты вращения.
- Низкая трудоемкость
Простота конструкции ВРД/ВРГ снижает трудоемкость его изготовления. В сущности, его можно изготовить даже на не специализирующемся в области электромашиностроения промышленном предприятии. Для серийного производства ВРД/ВРГ требуется обычное механическое оборудование — штампы для изготовления шихтованных сердечников статора и ротора, токарные и фрезерные станки для обработки валов и корпусных деталей. Трудоемкие и сложные в технологическом отношении операции, например изготовление коллектора и щеток коллекторного электродвигателя или заливка клетки ротора асинхронного двигателя, здесь отсутствуют. По предварительным оценкам трудоемкость изготовления ЭМП вентильного реактивного электродвигателя составляет на 70% меньше трудоемкости изготовления коллекторного и на 40% меньше трудоемкости изготовления асинхронного электродвигателя.
- Гибкость компоновки
Простота обмотки якоря и отсутствие обмотки и магнитов на роторе обеспечивает ВРД/ВРГ высокую гибкость компоновки. Конструкция электродвигателя/генератора может быть плоской, вытянутой, обращенной, секторной, линейной. Для выпуска целого типоряда электродвигателей/генераторов с различной мощностью можно использовать один и тот же комплект штампов для вырубки ротора и статора, поскольку для увеличения мощности достаточно увеличить соответственно длину набора ротора и статора. Не составляет труда изготовление машины с расположением статора как снаружи ротора, так и наоборот, а также встраивание электроники в корпус машины. Изменение коэффициента электромагнитной редукции позволяет создавать машины для облегченных и, напротив, тяжелых условий работы, включая моментные двигатели. Для привода некоторых рабочих машин выгоднее иметь линейные электродвигатели с возвратно-поступательным перемещением зубцового штока (аналога ротора). В ряде случаев может быть использована давно известная, но неэффективная в случае асинхронного электродвигателя конструкция дугостаторной машины, статор которой охватывает доступную для размещения дугу окружности ротора, в качестве которого может использоваться вал с зубчатым колесом.
На рисунках ниже приведены примеры некоторых возможных конструкций вентильных реактивных электродвигателей/генераторов. Синим цветом выделена подвижная часть электрической машины, зеленым — статор, красным — обмотки, серым — несущая конструкция.
- Высокая надежность
Простота конструкции обеспечивает ВРД/ВРГ более высокую безотказность, чем безотказность других типов электрических машин. Конструктивная и электрическая независимость фазных обмоток обеспечивает работоспособность ВРД даже в случае полного замыкания полюсной катушки одной из фаз. ВРГ остается работоспособным даже после выхода из строя одной или двух фаз.
- Широкий диапазон частот вращения (от единиц до сотен тысяч об/мин)
Электромагнитная редукция позволяет создавать малогабаритные “моментные” электродвигатели для приводов роботов, манипуляторов и других низкооборотных механизмов или низкооборотные высокоэффективные генераторы для ветровых или волновых электростанций. В то же время частота вращения быстроходных ВРД/ВРГ может превышать 100000 об/мин.
- Высокий КПД в широком диапазоне частот вращения
Практически достижимый КПД вентильного реактивного электродвигателя/генератора мощностью 1 КВт может доходить до 90 % в диапазоне 5-10-кратной перестройки частоты вращения. КПД более мощных электрических машин может достигать 95-98 %.
ВРД часто путают с синхронным реактивным электродвигателем (СРД), обмотки якоря которого питаются синусоидально изменяющимися напряжениями без обратной связи по положению ротора. СРД имеет низкий КПД, который не превышает 50 % для маломощных электродвигателей и до 70 % для мощных электрических машин.
- Импульсный характер питания ЭМП обеспечивает удобную стыковку с современной цифровой электроникой
Поскольку ВРД/ВРГ питается (возбуждается) однополярными импульсами, для управления ЭМП требуется простой электронный коммутатор. Управляя скважностью импульсов силовых транзисторов электронного коммутатора можно плавно изменять форму импульсов тока фазных обмоток электродвигателя или генератора.
- Электронное управление электрическими и механическими характеристиками, режимом работы
Естественная механическая характеристика ВРД/ВРГ определяется реактивным принципом действия электрической машины и близка к гиперболической форме. Основное свойство такой характеристики — постоянство мощности на валу машины — оказывается чрезвычайно полезным для электроприводов с ограниченной мощностью источника, так как при этом легко реализуется условие его неперегружаемости. Применение замкнутой системы управления с обратными связями по скорости и нагрузке позволяет получить механические характеристики любой заданной формы, включая абсолютно жесткие (астатические), и не ведет к какому либо усложнению системы управления, так как ее процессор обладает большой избыточностью по числу входов и выходов, быстродействию и памяти. Фактически поле доступных механических характеристик непрерывным образом покрывает все четыре квадранта плоскости момент-скорость в пределах области ограничений конкретного электропривода.
- Низкая стоимость электромеханического преобразователя
Стоимость ВРД оказывается самой низкой из всех известных конструкций электрических машин. Дорогостоящим в рассматриваемой системе электропривода можно считать электронный преобразователь, который является обязательным элементом всех современных регулируемых электроприводов. Однако, цены на изделия силовой электроники по мере развития масштабов производства имеют устойчивую тенденцию к снижению. Исключение из состава ВРД/ВРГ коммутационных аппаратов, для изготовления которых необходима непрерывно дорожающая медь, также способствует уменьшению стоимости.
Наконец, экономическая эффективность ВРД повышается также в результате существенно меньшего расхода электроэнергии, обусловленного высоким КПД электродвигателя и применением наиболее экономичных стратегий управления в динамических режимах работы.
См. также
Ссылки
Вентильный реактивный электродвигатель — это… Что такое Вентильный реактивный электродвигатель?
Сечение ВРД с 8 статорными и 6 роторными полюсами Сечение ВРД с 6 статорными и 4 роторными полюсами Принцип работы ВРД (SRM)Вентильный реактивный электродвигатель (ВРД) — это синхронная машина.
Достоинства
Вентильные реактивные электродвигатели/генераторы имеют следующие достоинства:
- Простая конструкция
Ротор и статор выполнены в виде пакетов листового магнитомягкого материала. На роторе ВРД отсутствуют обмотки и постоянные магниты. Фазные обмотки находятся только на статоре. Для уменьшения трудоемкости катушки обмотки якоря могут изготавливаться отдельно, а затем надеваться на полюсы статора.
- Высокая ремонтопригодность
Простота обмотки якоря повышает ремонтопригодность ВРД/ВРГ, т.к. для ремонта достаточно сменить вышедшую из строя катушку.
- Отсутствие механического коммутатора
Управление электромеханическим преобразователем электропривода/генератора осуществляется с помощью высокоэффективных силовых полупроводниковых элементов — IGBT или MOSFET (HEXFET) транзисторов, надежность которых существенно превышает надежность любых механических деталей, например: коллекторов, щеток, подшипников.
- Отсутствие постоянных магнитов
ВРД/ВРГ не содержит постоянных магнитов ни на роторе, ни на статоре, при этом он успешно конкурирует по характеристикам с вентильными электрическими двигателями с постоянными магнитами (ВЭДПМ). В среднем, при одинаковых электрических и весогабаритных характеристиках ВРД/ВРГ имеет в 4 раза меньшую стоимость, значительно большую надежность, более широкий диапазон частот вращения, более широкий диапазон рабочих температур. Конструктивно, по сравнению с ВЭДПМ, ВРД/ВРГ не имеет ограничения по мощности (практически, мощность ВЭДПМ ограничивается пределом около 20-40 кВТ). ВЭДПМ требуют защиты от металлической пыли, боятся перегрева и сильных электромагнитных полей, в случае короткого замыкания обмотки превращаются в самовозгорающуюся систему. Вентильные реактивные электродвигатели/генераторы свободны от всех этих недостатков.
- Малое количество меди
На изготовление ВРД/ВРГ требуется в среднем 2-3 раза меньше меди, чем для коллекторного электродвигателя такой же мощности, и в 1,3 раза меньше меди, чем для асинхронного электродвигателя.
- Tепловыделение происходит в основном только на статоре, при этом легко обеспечивается герметичная конструкция, воздушное или водяное охлаждение
В рабочем режиме не требуется охлаждение ротора. Для охлаждения ВРД/ВРГ достаточно использовать наружную поверхность статора.
- Высокие массогабаритные характеристики
В большинстве случаев ВРД/ВРГ может быть выполнен с полым ротором. Толщина спинки ротора при этом должна быть не менее половины ширины полюса. Подбором количества полюсов статора и ротора могут быть оптимизированы массогабаритные характеристики электродвигателя/генератора, его мощность при заданном моменте и диапазоне частоты вращения.
- Низкая трудоемкость
Простота конструкции ВРД/ВРГ снижает трудоемкость его изготовления. В сущности, его можно изготовить даже на не специализирующемся в области электромашиностроения промышленном предприятии. Для серийного производства ВРД/ВРГ требуется обычное механическое оборудование — штампы для изготовления шихтованных сердечников статора и ротора, токарные и фрезерные станки для обработки валов и корпусных деталей. Трудоемкие и сложные в технологическом отношении операции, например изготовление коллектора и щеток коллекторного электродвигателя или заливка клетки ротора асинхронного двигателя, здесь отсутствуют. По предварительным оценкам трудоемкость изготовления ЭМП вентильного реактивного электродвигателя составляет на 70% меньше трудоемкости изготовления коллекторного и на 40% меньше трудоемкости изготовления асинхронного электродвигателя.
- Гибкость компоновки
Простота обмотки якоря и отсутствие обмотки и магнитов на роторе обеспечивает ВРД/ВРГ высокую гибкость компоновки. Конструкция электродвигателя/генератора может быть плоской, вытянутой, обращенной, секторной, линейной. Для выпуска целого типоряда электродвигателей/генераторов с различной мощностью можно использовать один и тот же комплект штампов для вырубки ротора и статора, поскольку для увеличения мощности достаточно увеличить соответственно длину набора ротора и статора. Не составляет труда изготовление машины с расположением статора как снаружи ротора, так и наоборот, а также встраивание электроники в корпус машины. Изменение коэффициента электромагнитной редукции позволяет создавать машины для облегченных и, напротив, тяжелых условий работы, включая моментные двигатели. Для привода некоторых рабочих машин выгоднее иметь линейные электродвигатели с возвратно-поступательным перемещением зубцового штока (аналога ротора). В ряде случаев может быть использована давно известная, но неэффективная в случае асинхронного электродвигателя конструкция дугостаторной машины, статор которой охватывает доступную для размещения дугу окружности ротора, в качестве которого может использоваться вал с зубчатым колесом.
На рисунках ниже приведены примеры некоторых возможных конструкций вентильных реактивных электродвигателей/генераторов. Синим цветом выделена подвижная часть электрической машины, зеленым — статор, красным — обмотки, серым — несущая конструкция.
- Высокая надежность
Простота конструкции обеспечивает ВРД/ВРГ более высокую безотказность, чем безотказность других типов электрических машин. Конструктивная и электрическая независимость фазных обмоток обеспечивает работоспособность ВРД даже в случае полного замыкания полюсной катушки одной из фаз. ВРГ остается работоспособным даже после выхода из строя одной или двух фаз.
- Широкий диапазон частот вращения (от единиц до сотен тысяч об/мин)
Электромагнитная редукция позволяет создавать малогабаритные “моментные” электродвигатели для приводов роботов, манипуляторов и других низкооборотных механизмов или низкооборотные высокоэффективные генераторы для ветровых или волновых электростанций. В то же время частота вращения быстроходных ВРД/ВРГ может превышать 100000 об/мин.
- Высокий КПД в широком диапазоне частот вращения
Практически достижимый КПД вентильного реактивного электродвигателя/генератора мощностью 1 КВт может доходить до 90 % в диапазоне 5-10-кратной перестройки частоты вращения. КПД более мощных электрических машин может достигать 95-98 %.
ВРД часто путают с синхронным реактивным электродвигателем (СРД), обмотки якоря которого питаются синусоидально изменяющимися напряжениями без обратной связи по положению ротора. СРД имеет низкий КПД, который не превышает 50 % для маломощных электродвигателей и до 70 % для мощных электрических машин.
- Импульсный характер питания ЭМП обеспечивает удобную стыковку с современной цифровой электроникой
Поскольку ВРД/ВРГ питается (возбуждается) однополярными импульсами, для управления ЭМП требуется простой электронный коммутатор. Управляя скважностью импульсов силовых транзисторов электронного коммутатора можно плавно изменять форму импульсов тока фазных обмоток электродвигателя или генератора.
- Электронное управление электрическими и механическими характеристиками, режимом работы
Естественная механическая характеристика ВРД/ВРГ определяется реактивным принципом действия электрической машины и близка к гиперболической форме. Основное свойство такой характеристики — постоянство мощности на валу машины — оказывается чрезвычайно полезным для электроприводов с ограниченной мощностью источника, так как при этом легко реализуется условие его неперегружаемости. Применение замкнутой системы управления с обратными связями по скорости и нагрузке позволяет получить механические характеристики любой заданной формы, включая абсолютно жесткие (астатические), и не ведет к какому либо усложнению системы управления, так как ее процессор обладает большой избыточностью по числу входов и выходов, быстродействию и памяти. Фактически поле доступных механических характеристик непрерывным образом покрывает все четыре квадранта плоскости момент-скорость в пределах области ограничений конкретного электропривода.
- Низкая стоимость электромеханического преобразователя
Стоимость ВРД оказывается самой низкой из всех известных конструкций электрических машин. Дорогостоящим в рассматриваемой системе электропривода можно считать электронный преобразователь, который является обязательным элементом всех современных регулируемых электроприводов. Однако, цены на изделия силовой электроники по мере развития масштабов производства имеют устойчивую тенденцию к снижению. Исключение из состава ВРД/ВРГ коммутационных аппаратов, для изготовления которых необходима непрерывно дорожающая медь, также способствует уменьшению стоимости.
Наконец, экономическая эффективность ВРД повышается также в результате существенно меньшего расхода электроэнергии, обусловленного высоким КПД электродвигателя и применением наиболее экономичных стратегий управления в динамических режимах работы.