


Вентильный электродвигатель — это… Что такое Вентильный электродвигатель?
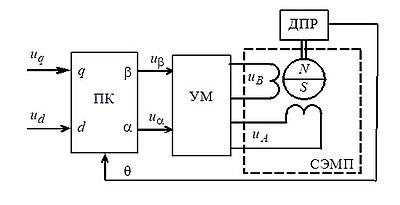
Принцип работы трёхфазного вентильного двигателя
Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что контроллер такого двигателя обычно питается от постоянного напряжения.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчиком положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор
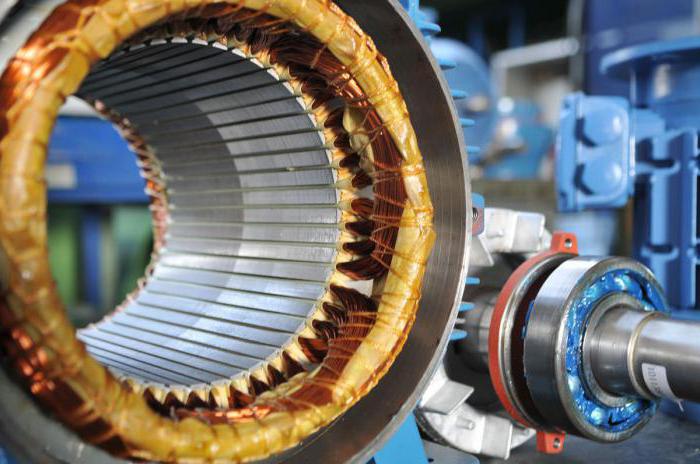
Статор бесколлекторного электродвигателя
Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
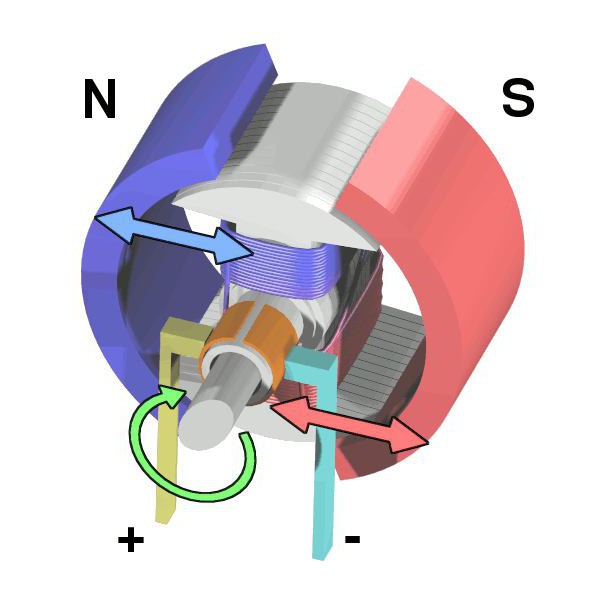
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из редкоземельных сплавов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
В двигателях большой мощности вместо постоянного магнита на роторе используется электромагнит. Напряжение питания к нему подаётся через щётки и контактные кольца установленные на роторе. Так устроен автомобильный генератор.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке. Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающееся магнитное поле.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера. Наличия микропроцессора требует большое количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД, основан на том что контроллер ВД так коммутирует обмотки статора чтобы вектор магнитного поля статора всегда был сдвинут на угол близкий к 90° или −90° относительно вектора магнитного поля ротора. C помощью ШИМ модуляции контроллер управляет током протекающим через обмотки ВД и значит величиной вектора магнитного поля статора и таким образом регулируется момент действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Внимание ! Градусы ЭЛЕКТРИЧЕСКИЕ. Они меньше геометрических градусов в число пар полюсов ротора. Например в ВД с ротором имеющим 3 пары полюсов оптимальный угол между векторами будет 90°/3 = 30°
Так как фаз коммутации обмоток всего 6 то вектор статора может перемещаться скачками по 60° — значит реальный угол между векторами будет не 90°, а будет меняться от 60° до 120° при вращении ротора ВД.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент действующий на ротор меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Высокое быстродействие и динамика, точность позиционирования
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 % и соsφ более 0,95)
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
- Низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
См. также
Ссылки
Wikimedia Foundation. 2010.
Основные технические особенности вентильных двигателей
Для решения задач контролируемого движения в современных прецизионных системах все чаще применяются вентильные (бесколлекторные) двигатели. Такая тенденция обусловлена преимуществами вентильных двигателей и бурным развитием вычислительных возможностей микроэлектроники. Как известно, вентильные (синхронные) двигатели обеспечивают наиболее высокие плотность длительного момента (момент в единице объема) и энергетическую эффективность по сравнению с любым другим типом двигателя.
Современный вентильный привод объединяет электрическую, механическую и электронную подсистемы в единое цельное мехатронное устройство. В рамках такого подхода удается значительно сократить габариты, избавиться от лишних преобразователей и промежуточных элементов, а значит, повысить надежность всего привода в целом.
В рамках данной статьи рассматривается принцип работы и устройство современных вентильных машин, описываются принципы управления вентильным преобразователем для коммутации с применением датчиков положения ротора, а также перечисляются особенности интегрированного исполнения вентильных двигателей.
1. Основные технические особенности вентильных двигателей
Под вентильным двигателем понимают синхронный двигатель, содержащий многофазную обмотку статора, ротор с постоянными магнитами и встроенным датчиком положения. Коммутация такого двигателя осуществляется при помощи вентильного преобразователя. Поэтому его принято называть «вентильным».
По сути, вентильный двигатель с точки зрения метода коммутации представляет собой «инвертированный» вариант коллекторной машины постоянного тока. В вентильном двигателе индуктор находится на роторе, якорная обмотка на статоре. Коммутация осуществляется путем подачи управляющего согласованного воздействия на обмотки статора в зависимости от положения ротора, определяемого с помощью интегрированных в двигатель датчиков обратной связи.
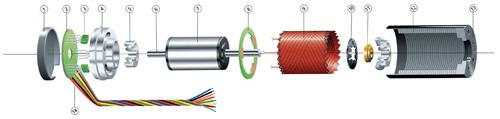
Рис. 1. Структура вентильного двигателя:
1 – задняя крышка, 2 – печатная плата датчиков, 3 – датчики Холла,
4 – втулка подшипника, 5 – подшипник, 6 – вал,
7 – магниты ротора, 8 – изолирующее кольцо, 9 – обмотка,
10 – тарельчатая пружина, 11 – промежуточная втулка, 12 – изоляция,
13 – корпус, 14 – провода.
Рассмотрим структуру вентильного двигателя на примере семейства двигателей Faulhaber (рис. 1). В данном случае в основе ротора лежит двухполюсный магнит, статора трехфазная обмотка, положение ротора определяется с помощью интегрированных в двигатель датчиков Холла. В общем случае ротор может содержать другое количество пар полюсов, а статор иметь более традиционную конструкцию, внешне сходную со статором асинхронной машины. Наиболее распространен статор с тремя обмотками, соединенными «звездой» (реже в «треугольник») без вывода средней точки. Как известно, именно трехфазная структура является наиболее эффективной при минимуме числа обмоток.
При соединении обмоток «звездой» вентильный двигатель имеет большие постоянные момента и меньшие постоянные противоЭДС (при соотношении ?3) по сравнению с соединением «треугольником». Поэтому соединение «звездой» используется для управления осями, требующими больших моментов, а соединение «треугольником» – для больших скоростей.
В большинстве случаев обмотки статора выполняются без насыщения, т.е. противоЭДС обмоток имеет синусоидальную форму. Такие двигатели зачастую называют AC brushless motor в отличие от DC brushless motor, обмотки статора которого выполняются с насыщением. Такое насыщение в DC brushless motor предназначено для снижения пульсаций тока (и соответственно момента) при применении трапецеидальной коммутации.
Но иногда термин DC brushless motor используют для двигателей с питанием через инвертор от сети постоянного тока, что не совсем корректно.
Обычно количество пар полюсов, определяемое количеством пар магнитов ротора и определяющее соотношение механического и электрического оборотов, равно 4…8. Статор может быть выполнен с железным (iron core) или безжелезным (ironless) сердечником. Конструкция статора с безжелезным сердечником обеспечивает отсутствие силы притяжения магнитов ротора и железа статорной обмотки (magnetic attraction) и зубцового эффекта (cogging), но снижает незначительно (на 10…20%) эффективность двигателя изза меньших значений постоянной момента.
Одно из самых очевидных преимуществ ротора с постоянными магнитами состоит в уменьшении диаметра ротора и, как следствие, в уменьшении момента инерции ротора. Технологически магниты могут быть встроены в ротор или расположены на его поверхности. Но пониженный момент инерции зачастую приводит к малым значениям соотношения момента инерции двигателя и приведенного к его валу момента инерции нагрузки (mismatch ratio), усложняющему настройку привода. Поэтому ряд производителей предлагает наряду со стандартным и повышенный – в 2…4 раза – момент инерции ротора.
2. Датчики положения и дополнительные устройства
В качестве датчика положения, необходимого для коммутации вентильного двигателя, могут быть использованы датчики Холла (цифровые или аналоговые), энкодер (цифровой, аналоговый или абсолютный) или резольвер.
Цифровые датчики Холла используются для наиболее распространенной – трапецеидальной коммутации вентильного двигателя. Цифровые датчики Холла могут быть выполнены также и на оптической шкале энкодера.Аналоговые датчики Холла используются для синусоидальной коммутации вентильного двигателя.
Энкодер имеет три дифференциальных канала – два канала А, В прямоугольных импульсов, сдвинутых на 90 электрических градусов, и нулевой импульс I (индекс). Резольвер представляет собой вращающийся трансформатор с обмоткой возбуждения и двумя выходными обмотками со сдвигом 90 электрических градусов.
Аналоговый энкодер имеет аналоговые sin/cos (1В между пиками peaktopeak) дифференциальные выходы.
Внешний интерполятор позволяет повысить исходное разрешение с коэффициентом умножения до 4096 .Абсолютный энкодер передает информацию по положению по синхронному последовательному интерфейсу (SSI или BiSS), протокол которого задается производителем энкодера. Одними из наиболее популярных протоколов являются Heidenhain EnDat, Tamagawa Smart Abs и Stegman Hiperface протоколы.
Кроме датчика положения дополнительно могут быть встроены: тахогенератор, термодатчик, тормоз или редуктор.
Тахогенератор применяется в случае использования вентильного двигателя в режиме регулирования/стабилизации скорости с высокой точностью.
Термодатчик для защиты обмоток от перегрева представляет собой несколько последовательно соединенных позисторов, т.е. терморезисторов с положительным температурным коэффициентом (positive temperature coefficient РТС).
3. Способы коммутации с применением датчика положения ротора
Способы коммутации вентильного двигателя различаются по типу датчика положения ротора и особенностям регулирования тока в фазах обмоток статора.
3.1. Трапецеидальная или шестишаговая (sixstep) коммутация вентильного двигателя осуществляется по цифровым датчикам Холла. Для 3х датчиков Холла, являющихся «грубым» датчиком положения ротора, возможных состояний на полный электрический оборот будет шесть, каждое из которых соответствует 60 электрическим градусам. При каждом постоянном состоянии датчиков Холла подключаются только две обмотки двигателя, а третья отключена от источника напряжения. Постоянство вектора тока в пределах ±30 электрических градусов от оптимального (создающего максимальный момент) приводит к 17% пульсациям тока.
Преимущества:
- готовность к работе при включении питания;
- дешевый усилитель тока;
- управление током (моментом) аналоговым сигналом ±10В.
Недостатки:
- пульсации тока;
- средние показатели быстродействия при позиционировании и равномерности при сканировании.
Область применения: регулирование скорости при невысоких требованиях к эффективности и равномерности перемещения на низких скоростях.
3.2. Синусоидальная коммутация лишена недостатков трапецеидальной коммутации за счет непрерывной и плавной коммутации вектора тока. Это достигается благодаря более высокому разрешению датчика положения ротора (обычно инкрементального энкодера) по сравнению с цифровыми датчиками Холла, имеющими разрешение только 60 электрических градусов. Для стандартного двигателя с соединением фаз в «звезду» достаточно контролировать ток в двух обмотках с помощью двух регуляторов на базе ПИрегуляторов. Такой способ коммутации очень эффективен на малых и средних скоростях, но имеет ошибки на высоких скоростях. В этом случае изза ограниченного усиления ПИрегулятора при заданном напряжении постоянного напряжения (DC bus) мах скорость ограничена. Несколько повысить скорость позволяет метод сдвиг фазы (phase advance).
Преимущества:
- минимальные пульсации тока;
- высокие показатели быстродействия при позиционировании и равномерности при сканировании.
Недостатки:
ограничение мах скорости при заданном напряжении постоянного напряжения;
управление током (моментом/силой) при помощи двух аналоговых сигналов ±10В.
Область применения: прецизионные механизмы.
3.3. Непосредственно векторный контроль тока в координатах DQ использует преобразования между статическими DQ и вращающими UVW координатами вектора тока, известными как преобразования ПаркаКларка. В отличие от синусоидальной такой способ коммутации предполагает работу ПИрегулятора с напряжениями постоянного тока, а не синусоидальными напряжениями. Это и обеспечивает качество управления током, независимое от скорости вращения двигателя.
Векторный контроль предполагает регулирование квадратичной (D) и прямой (Q) составляющих тока. Т.к. только прямая (Q) составляющая тока, перпендикулярная к полю ротора, создает момент двигателя, то задание тока подается на вход прямой (Q) составляющей тока. На вход квадратичной (D) составляющей тока подается «0» сигнал.
Преобразования между статическими DQ и вращающими UVW координатами вектора тока производятся с учетом токов фаз и положения ротора.
Векторный контроль при наличии преимуществ синусоидальной коммутации позволяет расширить диапазон скоростей вентильного двигателя за счет более полного использования напряжения постоянного тока.
Следует отметить, что для синусоидальной или векторной коммутации тока при использовании инкрементального (относительного) датчика положения ротора необходимо первоначально (т.е. при каждом включении питания) сфазировать положение ротора относительно фаз статора. Алгоритм такой начальной фазировки обычно является «встроенным».
Трапецеидальная коммутация вентильного двигателя не требует начальной фазировки благодаря использованию датчиков Холла, являющихся абсолютными датчиками положения ротора. Поэтому их иногда применяют вместе с инкрементальным датчиком положения для реализации синусоидальной или векторной коммутации тока без необходимости производить начальную фазировку. Такая конфигурация рекомендуется для механизмов, где реализация процедуры начальной фазировки затруднена, например, механизмов вертикального перемещения.
4. Интегрированное исполнение вентильных двигателей
Одной из основных перспективных тенденций в развитии современных вентильных двигателей является тяготение производителя к интеграции в единый корпус с двигателем управляющей электроники. Такое решение позволяет предлагать не разрозненный набор комплектующих приводной системы, а законченный привод в сборе. Таким образом решаются возможные проблемы совместимости различных компонент привода, а также проблема различных интерфейсов компонент приводной системы.
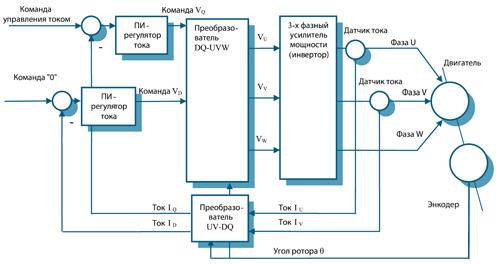
Рис. 2 Векторный контроль тока вентильного двигателя
Примером интегрированного привода является серия двигателей BG, предлагаемая компанией Dunkermotoren (рис. 3).
В рамках данной серии двигателей производитель предоставляет возможность заказать одну и ту же модель в различных исполнениях:
- без интегрированной управляющей электроники,
- с интегрированной коммутирующей электроникой (2wire),
- с интегрированным контроллером скорости,
- с интегрированным контроллером движения,
- с интегрированным контроллером движения с сетевыми интерфейсами (CAN, PROFINET).
5. Преимущества использования вентильных двигателей
При разработке нового изделия разработчик часто сталкивается с проблемой выбора двигателя для решения конкретной задачи движения. Когда речь идет о построении привода средней либо малой мощности, как правило, выбор сводится к сборкам на базе коллекторных, вентильных, а также шаговых двигателей.

Рис. 3 Двигатели Dunkermotoren серии BG
К несомненным достоинствам вентильных двигателей следует отнести:
Высокий запасаемый момент:
- Идеальное решение при высоких пиковых нагрузках
- Хорошее ускорение при изменяющихся нагрузках
Высокий диапазон скоростей
Высокую равномерность движения
Высокую точность позиционирования благодаря возможности использования энкодеров и других датчиков обратной связи по скорости/положению.
Двигатели для специальных применений: в среде высокого вакуума, автоклавируемые, погружные с высоким классом IP защиты.
М. Сонных, Л. Ганнель
Статья опубликована в журнале «РИТМ» №10, 2010
конструктивные особенности и принцип действия, преимущества и недостатки, количество фаз
 Работа прецизионных систем требует серьёзного контроля. Для выполнения контролирующих функций в таких системах принято использовать вентильный двигатель (ВД), позволяющий повысить вычислительные возможности микроэлектронного оборудования. Он же улучшает свойства электродвигателей постоянного тока, обеспечивая высокую плотность длительного момента.
Работа прецизионных систем требует серьёзного контроля. Для выполнения контролирующих функций в таких системах принято использовать вентильный двигатель (ВД), позволяющий повысить вычислительные возможности микроэлектронного оборудования. Он же улучшает свойства электродвигателей постоянного тока, обеспечивая высокую плотность длительного момента.
Конструктивные особенности
Этот тип электромотора имеет стандартную конструкцию. Она состоит из ротора, роль которого выполняет магнитный диск, статоров и подшипников. Все детали заключены в прочный корпус. Статор ВД аналогичен тому, что используется в асинхронных приборах. Основным его элементом выступает стальной сердечник, по периметру которого располагается обмотка из меди. От количества обмоток зависит, к какому типу будет относиться вентильный электродвигатель (однофазному, двухфазному, трёхфазному).
В зависимости от того, как витки обмотки располагаются в статоре, форма его электродвижущей силы может быть:
- Трапецеидальной (BLDC).
- Синусоидальной (PMSM).
Форма обмотки оказывает прямое влияние на способ питания двигателей. Изменение электрического тока также может происходить синусоидально либо трапецеидально.

Ротор представляет собой несколько магнитов с постоянным полем. Ранее для его производства применялись магниты из феррита. Но уровень их магнитной индукции достаточно мал, поэтому они были заменены на изделия из сплавов редкоземельных элементов, позволяющих достичь необходимого уровня индукции и одновременно сделать ротор более компактным.
Неотъемлемой частью любого вентильного двигателя является датчик положения ротора. В основе его работы может быть заложен:
- фотоэлектрический принцип;
- индуктивный принцип;
- эффект Холла и другие явления.
 Фотоэлектрический датчик положения состоит из трёх стационарных фотоприемников, которые поочерёдно закрываются вращающейся шторкой. Её движение синхронно движению ротора. Благодаря двоичному коду, поступающему с датчика, ротор может фиксироваться в шести разных положениях. Преобразуясь в комбинацию управляющих напряжений, сигналы регулируют силовые ключи по особой схеме. Каждая фаза работы электродвигателя задействует два ключа, а подключёнными к сети являются две из трёх обмоток.
Фотоэлектрический датчик положения состоит из трёх стационарных фотоприемников, которые поочерёдно закрываются вращающейся шторкой. Её движение синхронно движению ротора. Благодаря двоичному коду, поступающему с датчика, ротор может фиксироваться в шести разных положениях. Преобразуясь в комбинацию управляющих напряжений, сигналы регулируют силовые ключи по особой схеме. Каждая фаза работы электродвигателя задействует два ключа, а подключёнными к сети являются две из трёх обмоток.
Датчик положения фотоэлектрического типа относится к категории самых распространённых, поскольку является практически безынерционным. Также он позволяет исключить запаздывание в канале обратной связи.
Принцип действия
В зависимости от особенностей конструкции и технических характеристик выделяют асинхронный, синхронный и индуктивный вентильный двигатель. Принцип работы каждого из них основывается на индуцировании непостоянных магнитных полюсов на роторе. При подаче напряжения начинается его вращение в соответствии с полюсами статора, вследствие чего сопротивление магнитного поля сводится к минимуму.
Сведения о состоянии ротора используются в качестве инструмента управления фазой подачи напряжения. Наложение сигналов на угловую ненасыщенную фазу индуктивности осуществляется таким образом, что её максимальное значение совпадает с минимальным сопротивлением полюса.
 Сведения о состоянии ротора используются в качестве инструмента управления фазой подачи напряжения. Наложение сигналов на угловую ненасыщенную фазу индуктивности осуществляется таким образом, что её максимальное значение совпадает с минимальным сопротивлением полюса.
Сведения о состоянии ротора используются в качестве инструмента управления фазой подачи напряжения. Наложение сигналов на угловую ненасыщенную фазу индуктивности осуществляется таким образом, что её максимальное значение совпадает с минимальным сопротивлением полюса.Чтобы высокие вольт-секунды не оказывали негативного действия на работающую электронику, следует предусмотреть ограничение фазного тока на невысоких скоростях двигателя. Роль ограничителей в этом случае выполняют датчики. При высоких скоростях необходимость в ограничении тока отпадает.
Выровненный угол управляющего напряжения одиночного импульса позволяет оптимизировать производительность оборудования. Процесс её преобразования наглядно демонстрируется в виде траектории реактивной энергии. Преобразованное в механическую энергию питание отвечает за мощностную область. Отключение электроэнергии приводит к тому, что избыточная либо остаточная энергия переходит к статору. Влияние магнитного поля на работающий вентильный электродвигатель является минимальным. Это отличает ВД от других аналогичных устройств.
Преимущества и недостатки
Электродвигатели такого типа нашли широкое применение в производственной и промышленной сфере. Это обуславливается следующими достоинствами ВД:
- широким интервалом для модифицирования частоты вращения;
- максимально точным позиционированием;
- быстродействием и высокой динамикой;
- экономически выгодным техобслуживанием;
- достаточной защищенностью от взрывов;
- устойчивостью к большим нагрузкам при вращении;
- мягким переключением скоростей;
- хорошим КПД, превышающим 90%;
- большим рабочим ресурсом и сроком службы.
 максимально точным позиционированием;
максимально точным позиционированием;При длительной работе вентильного двигателя не происходит опасного перегрева основных элементов, что делает процесс его эксплуатации более эффективным и безопасным.
Эта разновидность электродвигателя обладает определёнными недостатками. Они выражаются в сложной системе управления и высоком уровне шума в процессе работы. Также к очевидным минусам следует отнести высокую цену, обусловленную применением дорогостоящих постоянных магнитов, используемых при изготовлении ротора.
Количество фаз
Вентильный электродвигатель, как и другие виды устройств, может функционировать от постоянного и переменного тока. Встречаются двигатели, рассчитанные на разное число фаз.
 Однофазный относится к категории самых простых, имеющих минимальное количество связей с электроникой. Характеризуется наличием пульсаций, высоким крутящим моментом. Однофазный прибор не может запускаться на всех угловых позициях, используется в установках, где важна высокая скорость.
Однофазный относится к категории самых простых, имеющих минимальное количество связей с электроникой. Характеризуется наличием пульсаций, высоким крутящим моментом. Однофазный прибор не может запускаться на всех угловых позициях, используется в установках, где важна высокая скорость.
Двухфазный мотор активирует воздушный зазор, а при дополнительном настраивании в полюсах ротора создаётся асимметрия. Имеет высокий крутящий момент, который может спровоцировать негативные последствия во время эксплуатации.
Трехфазное устройство показывает эффективность при запуске и создании крутящего момента без задействования большого числа фаз. При наличии чётного количества полюсов оптимально подходит для техники, в которой важную роль играет высокая мощность при небольшой скорости работы (к примеру, для насосов). В процессе работы создаётся высокий крутящий момент и большой уровень шума.

Четырехфазный двигатель лишён недостатков из-за завышенного крутящего момента и наличия пульсаций. Однако характерная для него высокая мощность и стоимость не позволяет широко использовать такой мотор в различном оборудовании.
Вентильный электродвигатель Википедия
 Рис. 1. Принцип работы трёхфазного вентильного двигателя
Рис. 1. Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще, чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесколлекторным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
Описание и принцип работы[2][ | ]
Вентильный двигатель Википедия
Рис. 1. Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще, чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесколлекторным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
Описание и принцип работы[2][
принцип работы. Электродвигатель вентильный своими руками
Вентильные электродвигатели во многом являются схожими с электромагнитными аналогами. Однако следует отметить, что устройства способны работать в сети постоянного и переменного тока. На сегодняшний день различают однофазные, двухфазные и трехфазные модификации.
В среднем мощность модели равняется 5 кВт. Рабочая частота двигателя не превышает 60 Гц. У некоторых модификаций применяется датчик положения ротора. Используются вентильные электродвигатели чаще всего для компрессоров и вентиляционных систем.
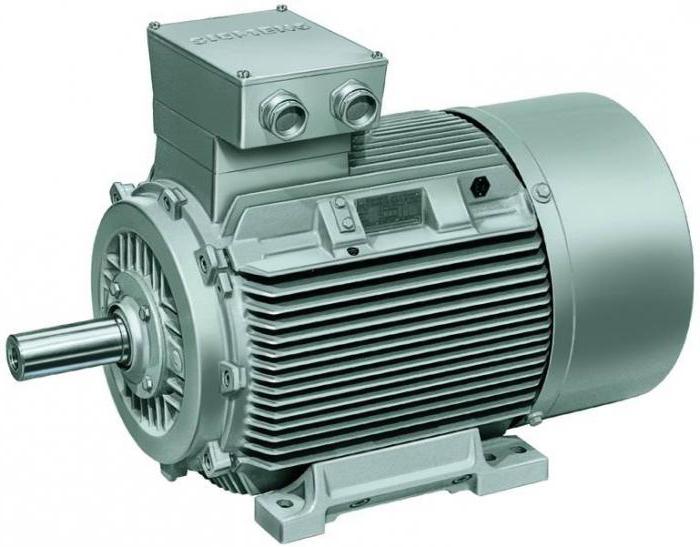
Схема устройства
Обычный двигатель включает в себя статорную коробку с якорем, а также ротор. Коллектор в маломощных модификациях устанавливается щеточного типа. Если рассматривать однофазные вентильные электродвигатели, то у них предусмотрен полюсный наконечник. За ним располагается специальный вал вращения. У мощных моделей есть сердечник ротора. Для возбуждения цепи применяется бендикс. Вал у двигателей вентильного двигателя вращается со специальным диском.
Принцип работы
Принцип действия двигателя строится на магнитной индукции. Процесс заключается в возбуждении обмотки статора. Происходит это путем подачи напряжения на бендикс. У многих модификаций также применяется датчик положения ротора. Для подключения регуляторов используются клеммные коробки. Для фиксации вала применяются зажимные кольца. У сверхмощных двигателей есть втягивающее реле. Оно необходимо для усиления электромагнитного поля.
Модель своими руками
Сделать электродвигатель (вентильный) своими руками довольно сложно. В первую очередь для сборки потребуется магнитный статор. В некоторых случаях ротор используют со стальным якорем. Далее потребуется заготовить вал с головкой. По диаметру он должен подходить под кольцо. Статор в данном случае обязан быть с первичной обмоткой, которая может выдерживать напряжение в 220 В.
Для подключения двигателя вентильного типа понадобится проводник. Подсоединяться он обязан к клеммной коробке. У некоторых модификаций вал крепится на диске. Таким образом, процесс набора оборотов происходит быстро. Для того чтобы избежать случаев коротких замыканий в цепи, используют уплотнитель.
Реактивная модификация
Сделать вентильный реактивный электродвигатель своими руками можно только на базе щеточного коллектора. В первую очередь потребуется подобрать ротор с обмоткой. Далее под него устанавливается вал. В некоторых случаях его используют с объемной насадкой. Для уменьшения силы трения понадобится небольшое кольцо на роликовых подшипниках.
Далее на вентильный реактивный электродвигатель устанавливается бендикс. В данном случае диск фиксируется на шпонке. Клеммная коробка обязана располагаться в задней части двигателя. Вал при этом должен находиться в центральной части корпуса. Вентиляционные отверстия чаще всего делают над ротором.
Устройства постоянного тока
Вентильный электродвигатель постоянного тока можно сложить на базе щеточного коллектора, который способен выдерживать большое выходное напряжение. После фиксации статора нужно заняться ротором. Для этого подбирается вал и диск небольшого диаметра. Также потребуется мощное втягивающее реле. Некоторые применяют его с высоковольтной обмоткой. На этом этапе особое внимание следует уделить фиксации сердечника для возбуждения обмотки. Используются погружные вентильные электродвигатели постоянного тока, как правило, в самолетостроении. У некоторых моделей предусмотрена сложная схема воздушного охлаждения с каналами.
Модели переменного тока
Сделать модель данного типа довольно просто. Однако для сборки потребуется бендикс. В данном случае его необходимо сразу подбирать со стальным сердечником. Некоторые специалисты рекомендуют применять алюминиевые наконечники. Однако проводимость тока у них невысокая. Непосредственно подача напряжения осуществляется через клеммную коробку.
Во многих модификациях щеточный коллектор устанавливается в передней части корпуса. Таким образом, вал можно использовать небольшого диаметра. Контактные кольца крепятся, если делается двигатель большой мощности. Для того чтобы уменьшить силу трения, можно использовать подшипники. Устанавливать их следует вблизи коллектора.
Двигатели однофазного типа
Для приводов небольшой мощности подходит однофазный вентильный электродвигатель. Принцип работы устройств основан на повышении индуктивности магнитного поля. Для этого применяется бесщеточный коллектор. Бендиксы в устройствах отсутствуют. Также важно отметить, что статоры могут использоваться только с большой проводимостью. Однако в первую очередь для сборки потребуется качественный ротор. Устанавливать его следует вблизи вала.
Следующим шагом необходимо наварить кольцо. Диск при этом обязан располагаться на другой стороне вала. Для охлаждения двигателя вентильного типа подойдет вентилятор. У некоторых модификаций для усиления индукции применяются втягивающие реле.
Двухфазные модели
Двухфазные вентильные электродвигатели можно собрать самостоятельно. Для этого специалисты рекомендуют использовать мощные бендиксы. В некоторых случаях применяются статоры с первичной обмоткой. Для фиксации ротора потребуется прочный корпус. В данном случае наконечники следует использовать с хорошей проводимостью.
Для того чтобы электромагнитное поле усиливалось равномерно, применяются катушки различной чувствительности. Втягивающие реле устанавливаются позади статоров. Вал в конструкция обязан находиться на диске. Для его фиксации применяются шпонки.

Трехфазные устройства
Трехфазовым вентильным электродвигателем называют устройство, работающее по принципу возрастания индукции магнитного поля. У моделей бендиксы устанавливаются только с высокой чувствительностью. В данном случае для усиления электромагнитного поля применяются полюсные наконечники. Непосредственно статоры используются с лапами. У некоторых модификаций есть щеткодержатели. Также важно отметить, что трехфазные вентильные электродвигатели часто применяются для работы приводов на 20 кВт. Частотность в данном случае не превышает 60 Гц. Вал у моделей обязан вращаться свободно. Для этого производители оснащают устройства роликовыми подшипниками. У многих моделей есть специальные проводники, которые соединяются с клеммной коробкой. Непосредственно подача напряжения происходит через силовой кабель.
Модель с низкочастотным бендиксом
Низкочастотные бендиксы позволяют стабильно повышать индуктивность в цепи. Многие модели данного типа отличаются своей чувствительностью. Для того чтобы собрать устройство самостоятельно, необходимо подобрать хороший статор. Модификации с якорями не подойдут.
Также важно отметить, что низкочастотные бендиксы не способны работать с втягивающими реле. Все это приводит к быстрому перегреву двигателя. Для того чтобы исправить ситуацию, потребуется мощный вентилятор. Также следует предусмотреть небольшую катушку. За счет этого обмотка сможет выдерживать напряжение в 220 В. Чтобы избежать случаев коротких замыканий, применяют щеткодержатель.

Применение высокочастотных бендиксов
Сделать двигатель с высокочастотным бендиксом довольно просто. Для этого потребуется простой статор. Непосредственно ротор подбирается с первичной обмоткой. Чтобы повысить обороты вала используют специальные заточные диски. У многих конфигураций применяются втягивающие реле. Также важно отметить, что для сборки двигателя данного типа необходим качественный щеткодержатель. Для его фиксации используют контактные кольца. Чтобы уменьшить силу вибрации, применяются уплотнители разной жесткости. Во многих конфигурациях над ротором устанавливается кожух.

Использование тягового реле
Тяговые реле очень часто устанавливаются на примышленный вентильный электродвигатель. Принцип работы устройств строится на умеренном увеличении силы магнитного поля. В данном случае происходит последовательное возбуждение обмотки. Для того чтобы самостоятельно собрать модификацию, следует использовать щеточный коллектор.
Также в этой ситуации не обойтись без катушки главного полюса. Однако в первую очередь нужно зафиксировать ротор с валом. После этого можно будет заняться клеммной коробкой. Первичная обмотка у двигателя вентильного типа обязана выдерживать выходное напряжение в 220 В. Отдельное внимание следует уделить статору. Для уменьшения силы вибрации используются уплотнители большой жесткости. Для фиксации вала понадобится стопорное кольцо.
Вентильный двигатель Википедия
Рис. 1. Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще, чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесколлекторным двигателем постоянного тока, если противо-ЭДС трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.