


Устройство и принцип работы электродвигателя
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Содержание статьи
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться.
В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент.
На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щетокили их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора.Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Понравилась статья? Поделиться с друзьями:
Принцип работы электродвигателя — устройство и отличия разных видов
Электродвигатели – это устройства, в которых электрическая энергия превращается в механическую. В основе принципа их действия лежит явление электромагнитной индукции.
Однако способы взаимодействия магнитных полей, заставляющих вращаться ротор двигателя, существенно различаются в зависимости от типа питающего напряжения – переменного или постоянного.
Устройство и принцип действия электродвигателя постоянного тока
В основе принципа работы электродвигателя постоянного тока лежит эффект отталкивания одноименных полюсов постоянных магнитов и притягивания разноименных. Приоритет ее изобретения принадлежит русскому инженеру Б. С. Якоби. Первая промышленная модель двигателя постоянного тока была создана в 1838 году. С тех пор его конструкция не претерпела кардинальных изменений.
В двигателях постоянного тока небольшой мощности один из магнитов является физически существующим. Он закреплен непосредственно на корпусе машины. Второй создается в обмотке якоря после подключения к ней источника постоянного тока. Для этого используется специальное устройство – коллекторно-щеточный узел. Сам коллектор – это токопроводящее кольцо, закрепленное на валу двигателя. К нему подключены концы обмотки якоря.
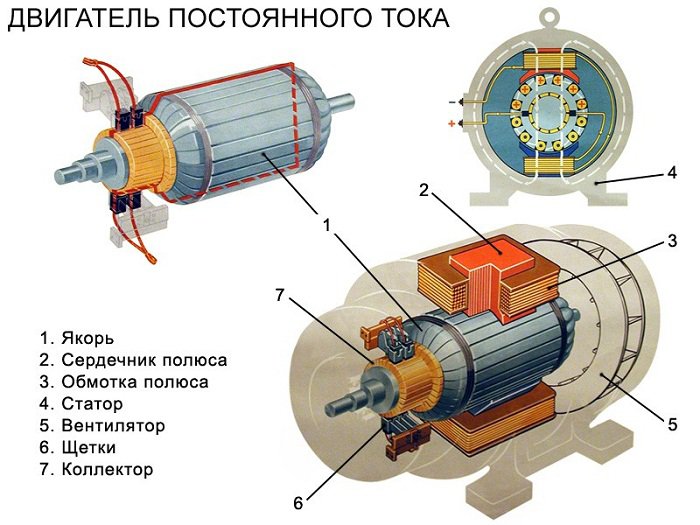
Чтобы возник вращающий момент, необходимо непрерывно менять местами полюса постоянного магнита якоря. Происходить это должно в момент пересечения полюсом так называемой магнитной нейтрали. Конструктивно такая задача решается разделением кольца коллектора на секторы, разделенные диэлектрическими пластинами. Концы обмоток якоря присоединяются к ним поочередно.
В двигателях большой мощности физически существующих магнитов не используют из-за их большого веса. Для создания постоянного магнитного поля статора используется несколько металлических стержней, каждый из которых имеет собственную обмотку из проводника, подключенного к плюсовой или минусовой питающей шине. Одноименные полюса включаются последовательно друг другу.
Количество пар полюсов на корпусе двигателя может быть равно одной или четырем. Число токосъемных щеток на коллекторе якоря должно ему соответствовать.
 Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Также существует три схемы подключения двигателя постоянного тока:
- с параллельным возбуждением;
- последовательным;
- смешанным.
Параллельное возбуждение – это когда параллельно обмотке якоря включается еще одна независимая, обычно регулируемая (реостат). Такой способ подключения позволяет очень плавно регулировать скорость вращения и достигать ее максимальной стабильности. Его используют для питания электродвигателей станков и кранового оборудования.
Последовательная – в цепь питания якоря дополнительная обмотка включена последовательно. Такой тип подключения используется для того, чтобы в нужный момент резко нарастить вращающее усилие двигателя. Например, при трогании с места железнодорожных составов.
Двигатели постоянного тока имеют возможность плавной регулировки частоты вращения, поэтому их применяют в качестве тяговых на электротранспорте и грузоподъемном оборудовании.
Двигатели переменного тока — в чем отличие?
 Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Вращающееся магнитное поле возникает в трех обмотках статора двигателя сразу, как только они подключаются к цепи питающего напряжения. Ротор такого электромотора в традиционном исполнении не имеет никаких обмоток и представляет собой, грубо говоря, кусок железа, чем-то напоминающий беличье колесо.
Магнитное поле статора провоцирует возникновение в роторе тока, причем очень большого, ведь это короткозамкнутая конструкция. Этот ток вызывает возникновение собственного поля якоря, которое «сцепляется» с вихревым магнитным потом статора и заставляет вращаться вал двигателя в том же направлении.
Магнитное поле якоря имеет ту же скорость, что и статора, но отстает от него по фазе примерно на 8–100. Именно поэтому двигатели переменного тока называются асинхронными.Принцип действия электродвигателя переменного тока с традиционным, короткозамкнутым ротором, имеет очень большие пусковые токи. Вероятно, многие из вас это замечали – при пуске двигателей лампы накаливания меняют яркость свечения. Поэтому в электрических машинах большой мощности применяется фазный ротор – на нем уложены три обмотки, соединенные «звездой».
Обмотки якоря не подключены к питающей сети, а посредством коллекторно-щеточного узла соединены с пусковым реостатом. Процесс включения такого двигателя состоит из соединения с питающей сетью и постепенного уменьшения до нуля активного сопротивления в цепи якоря. Электромотор включается плавно и без перегрузок.
Особенности использования асинхронных двигателей в однофазной цепи
 Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Для этого на статоре должно быть две обмотки, одна из которой является «пусковой». Ток в ней сдвигается по фазе на 90° за счет включения в цепь реактивной нагрузки. Чаще всего для этого используется конденсатор.
Запитать от бытовой розетки можно и промышленный трехфазный двигатель. Для этого в его клеммной коробке две обмотки соединяются в одну, и в эту цепь включается конденсатор. Исходя из принципа работы асинхронных электродвигателей, запитанных от однофазной цепи, следует указать, что они имеют меньший КПД и очень чувствительны к перегрузкам.
Электродвигатели этого типа легко запускаются, но частоту их вращения практически невозможно регулировать.Они чувствительны к перепадам напряжения, а при «недогрузе» снижают коэффициент полезного действия, становясь источником непропорционально больших затрат электроэнергии. При этом существуют методы использования асинхронного двигателя как генератор.
Универсальные коллекторные двигатели — принцип работы и характеристики
 В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.
В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.В таких двигателях магнитное поле статора создается за счет питающего напряжения. Только немного изменена конструкция магнитопроводов – она не литая, а наборная, что позволяет уменьшать перемагничивание и нагрев токами Фуко. Последовательно включенная в цепь якоря индуктивность дает возможность менять направление магнитного поля статора и якоря в одном направлении и в той же фазе.
Практически полная синхронность магнитных полей позволяет двигателю набирать обороты даже при значительных нагрузках на валу, что и требуется для работы дрелей, перфораторов, пылесосов, «болгарок» или полотерных машин.
Если в питающую цепь такого двигателя включен регулируемый трансформатор, то частоту его вращения можно плавно менять. А вот направление, при питании от цепи переменного тока, изменить не удастся никогда.
Такие электромоторы способны развивать очень высокие обороты, компактны и имеют больший вращающий момент. Однако наличие коллекторно-щеточного узла снижает их моторесурс – графитовые щетки достаточно быстро истираются на высоких оборотах, особенно если коллектор имеет механические повреждения.Электродвигатели имеют самый большой КПД (более 80 %) из всех устройств, созданных человеком. Их изобретение в конце XIX века вполне можно считать качественным цивилизационным скачком, ведь без них невозможно представить жизнь современного общества, основанного на высоких технологиях, а чего-либо более эффективного пока еще не придумано.
Синхронный принцип работы электродвигателя на видео
Принцип работы электродвигателя. Простыми словами о сложном
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.

Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…

Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.

Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:

Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:

Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.

Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
 максимальный")
Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.

Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.

Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.

Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:

Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.

Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.

Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.

Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.

Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.

Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
устройство, принцип работы, типы, управление
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
 Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
 Рисунок 2. Схемы подключения обмоток статора ДПТ
Рисунок 2. Схемы подключения обмоток статора ДПТУ каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
 Рисунок 3. Ротор с тремя обмотками
Рисунок 3. Ротор с тремя обмотками Рисунок 4. Якорь со многими обмотками
Рисунок 4. Якорь со многими обмоткамиПодобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
 Рисунок 5. Схема электромотора с многообмоточным якорем
Рисунок 5. Схема электромотора с многообмоточным якоремКоллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
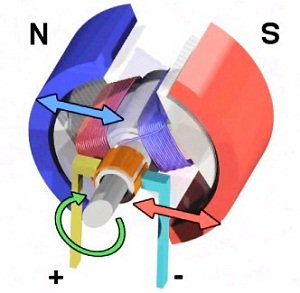
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
 Рис. 6. Принцип работы ДПТ
Рис. 6. Принцип работы ДПТЕсли вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
 Примеры механических характеристик ДПТ независимого возбуждения
Примеры механических характеристик ДПТ независимого возбужденияРегулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
 Пример регулировочных характеристик двигателя с якорным управлением
Пример регулировочных характеристик двигателя с якорным управлениемБлагодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Это может быть интересно:Устройство и принцип работы электродвигателя переменного тока
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Режимы работы электродвигателя в следующей статье.
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Виды
Электродвигатели постоянного тока разделяют по характеру возбуждения:
Независимое возбуждение
При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждение
Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждение
В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатации
Электродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока
- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
Недостатки
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.
- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.
Сфера использования
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.