


Тема лекции 10 Механические характеристики электродвигателей план лекции
1.Естественные и искусственные механические характеристики электродвигателей
Жесткостьмеханических характеристик
Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Естественная механическая характеристика асинхронного двигателя
Механическая характеристика синхронного двигателя.Область применения синхронных двигателей на судах
Механической
характеристикой двигателя, независимо
от рода тока, называют зависимость
угловой скорости вала электродвигателя
ω (далее – двигателя) от электромагнитного
момента двигателя 
 ).
). Здесь
следует сделать важное замечание: в
соответствии с уравнением моментов, в
установившемся режиме  =
=
 ,
электромагнитный момент двигателя
уравновешивается
статическим
моментом
(моментом
сопротивления)
механизма. Это означает, что
,
электромагнитный момент двигателя
уравновешивается
статическим
моментом
(моментом
сопротивления)
механизма. Это означает, что
То есть, для любого двигателя входной величиной является момент механизма, а выходной – его скорость.
Скорость почти всех электродвигателей является убывающей функцей момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33]. Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Жёсткость механические характеристик электропривода β
β
= (М2– М1)/(
ω2 – ω1)=
Δ / Δω
/ Δω
Обычно на рабочих участках механические характеристики электродвигателей имеют отрицательную жёсткость β < 0, так как( ω2< ω1,
М1< М2) при большей скорости электромагнитный момент меньше.
Различают естественные и искусственные механические характеристики электродвигателей.
Естественная механическая характеристика – это зависимость ω(), снятаяпри нормальных условиях работы двигателя, т.е. при номинальных параметрах питающей сети и отсутствии добавочных резисторов в цепях обмоток двигателей.
К параметрам питающей сети относятся: при постоянном токе – напряжение, при переменном токе – напряжение и частота тока.
Характеристики, снятые при условиях, отличных от нормальных, называют искусственными.
Искусственные характеристики можно получить путем изменения параметров двигателя, например, путем введения резисторов в цепь обмотки якоря двигателя постоянного тока или в цепь обмотки ротора асинхронного двигателя, либо изменением параметров питающей сети, т.е. напряжения и частоты переменного тока.
Каждый электродвигатель имеет одну естественную и множество искусственных характеристик. Число искусственных характеристик зависит от числа ступеней регулирующего элемента, например, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя постоянного тока. Если у двигателя таких ступеней – пять, то такой двигатель имеет шесть характеристик – пять искусственных и одну естественную.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможение, и др.
Рассмотрим естественные механические характеристики двигателей разных типов.
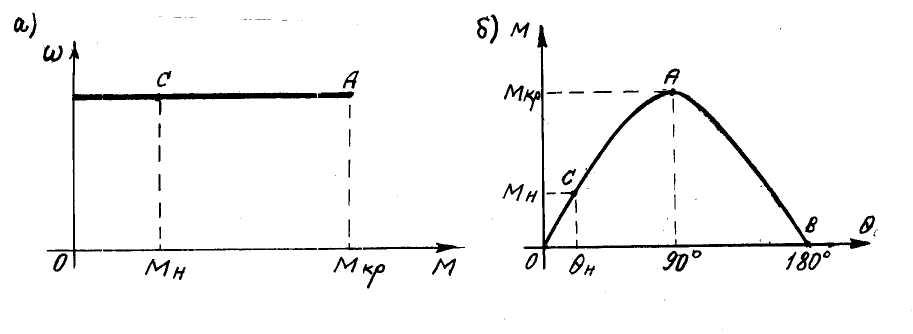
Рис. 10.1 Естественная механическая (а) и угловая (б) характеристики синхронного двигателя; θ – угол отставания оси ротора от оси магнитного поля обмотки статора
Механические характеристики электродвигателей
Правильный выбор электродвигателя для производственного механизма – залог его нормальной и экономичной работы. Если электродвигатель подобран правильно, это упростит систему управления электроприводом и возможно удешевит стоимость электропривода. Как известно электропривод должен обеспечивать не только постоянство установившихся значений (скорость, момент), но и динамических (переходных процессов, таких как ускорение, тормозной момент, пусковой момент и т.д.).
Основным критерием для подбора электродвигателей используют зависимость, на которой отображают значение момента М электродвигателя и скорости вращения вала n при действии этого момента. Такая зависимость имеет название механическая характеристика n=f(M). По механическим характеристикам производят анализ электромеханических свойств двигателя, а также оценивают целесообразность применения его для различного рода механизмов и устройств. Они могут быть двух видов: естественные и искусственные.
Естественные механические характеристики: они снимаются при влиянии на двигатель номинальных параметров (номинальный ток, сопротивление обмоток, напряжение, момент сопротивления и т.д.). То есть двигатель подключается к источнику питания без каких-либо преобразовательных устройств – прямым включением.

Искусственные механические характеристики: их снимают при введении в цепь двигателя дополнительных элементов (резистор добавочный) или при пониженном напряжении питания, частоте (если двигатель переменного напряжения) и т.д. То есть на механическую характеристику двигателя производят искусственное влияние.

Также различают механические характеристики по изменению скорости вращения вала в зависимости от увеличения момента. Они оцениваются по жесткости:

и крутизне наклона:

Чтоб определить жесткость механической характеристики необходимо знать изменение скорости и момента на заданном участке зависимости n=f(M). Соответственно все расчеты жесткости ведутся либо в процентах, либо в относительных единицах.
Также механические характеристики можно отсортировать по группам:
- Абсолютно жесткая – при изменении момента нагрузки, скорость вращения вала остается неизменной. Как пример – характеристика синхронной машины.


- Жесткая – когда скорость уменьшается немного при увеличении момента нагрузки. Как пример, двигатели постоянного тока независимого возбуждения ДПТ НВ или линейная часть характеристики асинхронного двигателя.
- Мягкая – при увеличении момента нагрузки изменения в скорости вращения довольно существенные. К таким относят двигатели постоянного тока последовательного возбуждения ДПТ ПВ.
Ниже приведен график различных механических характеристик электродвигателей:

- – это абсолютно жесткая синхронной машины
- – жесткая ДПТ НВ
- — мягкая ДПТ ПВ
- – мягкая ДПТ смешанного возбуждения
- – асинхронного двигателя
Подбор электродвигателя определяется требованиями производственных механизмов. В таком производстве как прокатка металла, изготовление бумаги или картона, требуется четкое поддержание постоянства скорости, а такие механизмы, как подъемные и транспортные, не требуют жестких характеристик (в тяговых электроприводах используется ДПТ ПВ, также он применяется в некоторых крановых механизмах).
32. Механические характеристики электродвигателей постоянного тока
Рассмотрим двигатель с параллельным возбуждением в установившемся режиме работы (рис. 11.14). Обмотка возбуждения подключена параллельно якорной обмотке.
 ,
откуда
,
откуда 
 (11.6)
(11.6)
Механической
характеристикой двигателя называется
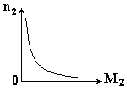
зависимость частоты вращения якоря n2 от момента на валу M2 при U = const и Iв = const.
Уравнение (11.6) является
уравнением механической характеристики
двигателя с параллельным возбуждением.
Рис. 11.14 
Эта характеристика является жесткой. С увеличением нагрузки частота вращения такого двигателя уменьшается в небольшой степени (рис. 11.15).
На
рисунке 11.16 изображен двигатель
последовательного возбуждения. Якорная
обмотка и обмотка возбуждения включены
последовательно. 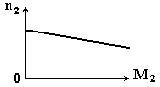
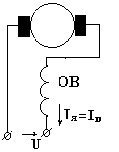 Ток
возбуждения двигателя одновременно
является током якоря. Магнитный поток
индуктора пропорционален току якоря.
Ток
возбуждения двигателя одновременно
является током якоря. Магнитный поток
индуктора пропорционален току якоря.

где k — коэффициент пропорциональности. Момент на валу двигателя пропорционален квадрату тока якоря.

откуда

Механическая характеристика двигателя последовательного возбуждения является мягкой (рис. 11.17).
С
увеличением нагрузки скорость двигателя
резко падает.
С
уменьшением нагрузки на валу двигатель
развивает очень большую частоту
вращения. Говорят, что двигатель идет
вразнос. Работа двигателя последовательного
возбуждения без нагрузки недопустима.
Двигатель смешанного
возбуждения имеет механическую
характеристику, представляющую собой
нечто среднее между механическими
характеристиками двигателя параллельного
и последовательного возбуждения. 36.
Синхронные двигатели. В
отличие от асинхронного двигателя
частота вращения синхронного двигателя
постоянная при различных нагрузках.
Синхронные двигатели находят применение
для привода машин постоянной скорости
(насосы, компресоры, вентиляторы).
В статоре синхронного
электродвигателя размещается обмотка,
подключаемая к сети трехфазного тока
и образующая вращающееся магнитное
поле. Ротор двигателя состоит из
сердечника с обмоткой возбуждения.
Обмотка возбуждения через контактные
кольца подключается к источнику
постоянного тока. Ток обмотки возбуждения
создает магнитное поле, намагничивающее
ротор.
Роторы синхронных
машин могут быть явнополюсными и
неявнополюсными. На рис. 12.10а сердечник
1 явнополюсного ротора с выступающими
полюсами. На полюсах размещены катушки
возбуждения 2. 12.10б неявнополюсной
ротор, представляющий собой ферромагнитный
цилиндр 1. На поверхности ротора в осевом
направлении фрезеруют пазы, в которые
укладывают обмотку возбуждения 2.
Рассмотрим принцип работы синхронного
двигателя на модели (рис. 12.11) Вращающееся
магнитное поле статора представим в
виде магнита 1. Намагниченный ротор
изобразим в виде магнита 2. Повернем
магнит 1 на угол α. Северный магнитный
полюс магнита 1 притянет южный полюс
магнита 2, а южный полюс магнита 1 —
северный полюс магнита 2. Магнит 2
повернется на такой же угол α. Будем
вращать магнит 1. Магнит 2 будет вращаться
вместе с магнитом 1, причем частоты
вращения обоих магнитов будут одинаковыми,
синхронными, n2 = n1.
.
Синхронный двигатель, на роторе которого
отсутствует обмотка возбуждения,
называется синхронным реактивным
двигателем.
Ротор
синхронного реактивного двигателя
изготавливается из ферромагнитного
материала и должен иметь явновыраженные
полюсы. Вращающееся магнитное поле
статора намагничивает ротор. Явнополюсный
ротор имеет неодинаковые магнитные
сопротивления по продольной и поперечной
осям полюса. Силовые линии магнитного
поля статора изгибаются, стремясь
пройти по пути с меньшим магнитным
сопротивлением. Деформация магнитного
поля вызовет, вследствие упругих свойств
силовых линий, реактивный момент,
вращающий ротор синхронно с полем
статора.
Если к
вращающемуся ротору приложить тормозной
момент, ось магнитного поля ротора
повернется на угол θ относительно оси
магнитного поля статора.
С увеличением нагрузки этот угол
возрастает. Если нагрузка превысит
некоторое допустимое значение, двигатель
остановится, выпадет из синхронизма.
У синхронных двигателей
отсутствует пусковой момент. Это
объясняется тем, что электромагнитный
вращающий момент, воздействующий на
неподвижный ротор, меняет свое направление
два раза за период Т переменного тока.
Из-за своей инерционности, ротор не
успевает тронуться с места и развить
необходимое число оборотов.
В настоящее время применяется
асинхронный пуск синхронного двигателя.
В пазах полюсов ротора укладывается
дополнительная короткозамкнутая
обмотка.
Вращающее
магнитное поле статора индуктирует в
короткозамкнутой пусковой обмотке
вихревые токи. При взаимодействии этих
токов с магнитным полем статора
образуется асинхронный электромагнитный
момент, приводящий ротор во вращение.
Когда частота вращения ротора приближается
к частоте вращения статорного поля,
двигатель втягивается в синхронизм и
вращается с синхронной скоростью.
Короткозамкнутая обмотка не перемещается
относительно поля, вихревые токи в ней
не индуктируются, асинхронный пусковой
момент становится равным нулю.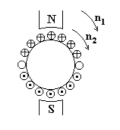
35. Однофазные асинхронные двигатели
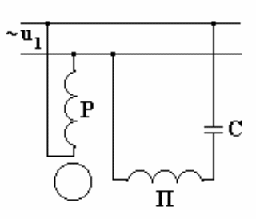
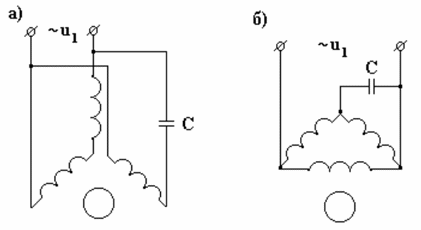
Однофазный двигатель имеет одну обмотку, расположенную на статоре. Однофазная обмотка, питаемая переменным током, создаст пульсирующее магнитное поле. Поместим в это поле ротор с короткозамкнутой обмоткой. Ротор вращаться не будет. Если раскрутить ротор сторонней механической силой в любую сторону, двигатель будет устойчиво работать. Объяснить это можно следующим образом. Пульсирующее магнитное поле можно заменить двумя магнитными полями, вращающимися в противоположных направлениях с синхронной частотой n1 и имеющими амплитуды магнитных потоков, равные половине амплитуды магнитного потока пульсирующего поля. Одно из магнитных полей называется прямовращающимся, другое — обратновращающимся. Каждое из магнитных полей индуктирует в роторной обмотке вихревые токи. При взаимодействии вихревых токов с магнитными полями образуются вращающие моменты, направленные встречно друг другу. На рис. 12.7 изображены зависимости момента от прямого поля М’, момента от обратного поля М» и результирующего момента М в функции скольжения М = М’ — M». Оси скольжений направлены встречно друг другу. В пусковом режиме на ротор действуют вращающие моменты, одинаковые по величине и противоположные по направлению. Раскрутим ротор сторонней силой в направлении прямовращающегося магнитного поля. Появится избыточный (результирующий) вращающий момент, разгоняющий ротор до скорости, близкой к синхронной. При этом скольжение двигателя относительно прямовращающегося магнитного поля Скольжение двигателя относительно обратновращающегося магнитного поля Рассматривая результирующую характеристику, можно сделать следующие выводы: 1. Однофазный двигатель не имеет пускового момента. Он будет вращаться в ту сторону, в которую раскручен внешней силой.2. Из-за тормозного действия обратновращающегося поля характеристики однофазного двигателя хуже, чем трехфазного. Для создания пускового момента однофазные двигатели снабжают пусковой обмоткой, пространственно смещенной относительно основной, рабочей обмотки на 90o. Пусковая обмотка подключается к сети через фазосдвигающие элементы: конденсатор или активное сопротивление. На рис. 12.8 показана схема включения обмоток двигателя, где Р — рабочая обмотка, П — пусковая обмотка. Емкость фазосдвигающего элемента С подбирают таким образом, чтобы токи в рабочей и пусковой обмотках различались по фазе на 90o. Трехфазный асинхронный двигатель может работать от однофазной сети, если подключить его обмотки по следующим схемам.(Рис. 12.9) В схеме на рис. 12.9а статорные обмотки соединены звездой. В схеме на рис. 12.9б статорные обмотки соединены треугольником. Величина емкости С ≈ 60 мкф на 1 кВт мощности.
34
Асинхронные двигатели.Конструкция,
принцип действия Асинхронный
двигатель имеет неподвижную часть, именуемую статором,
и вращающуюся часть, называемую ротором.
В статоре размещена обмотка, создающая
вращающееся магнитное поле.
Различают
асинхронные двигатели с короткозамкнутым
и фазным ротором.
В пазах ротора
с короткозамкнутой обмоткой размещены
алюминиевые или медные стержни. По
торцам стержни замкнуты алюминиевыми
или медными кольцами. Статор и ротор
набирают из листов электротехнической
стали, чтобы уменьшить потери на вихревые
токи.
Фазный ротор имеет
трехфазную обмотку (для трехфазного
двигателя). Концы фаз соединены в общий
узел, а начала выведены к трем контактным
кольцам, размещенным на валу. На кольца
накладывают неподвижные контактные
щетки. К щеткам подключают пусковой
реостат. После пуска двигателя
сопротивление пускового реостата
плавно уменьшают до нуля.
Принцип действия асинхронного
двигателя рассмотрим на модели,
представленной на рисунке 12.4.
Вращающееся магнитное поле статора
представим в виде постоянного магнита,
вращающегося с синхронной частотой
вращения n1.
В проводниках замкнутой
обмотки ротора индуктируются токи.
Полюса магнита перемещаются по часовой
стрелке.
Наблюдателю,
разместившемуся на вращающемся магните,
кажется, что магнит неподвижен, а
проводники роторной обмотки перемещаются
против часовой стрелки. Направления
роторных токов, определенные по правилу
правой руки, указаны на рис. 12.4.Пользуясь
правилом левой руки, найдем направление
электромагнитных сил, действующих на
ротор и заставляющих его вращаться.
Ротор двигателя будет вращаться с
частотой вращения n2 в направлении вращения поля статора.
Ротор вращается
асинхронно т.е частота вращения его n2 меньше частоты вращения поля статора
n1.
Относительная разность
скоростей поля статора и ротора
называется скольжением. Скольжение
не может быть равным нулю, так как при
одинаковых скоростях поля и ротора
прекратилось бы наведение токов в
роторе и, следовательно, отсутствовал
бы электромагнитный вращающий момент.
Вращающий электромагнитный
момент уравновешивается противодействующим
тормозным моментом Мэм = М2.
С увеличением нагрузки
на валу двигателя тормозной момент
становится больше вращающего, и
скольжение увеличивается. Вследствие
этого, возрастают индуктированные в
роторной обмотке ЭДС и токи. Вращающий
момент увеличивается и становится
равным тормозному моменту. Вращающий
момент может возрастать с увеличением
скольжения до определенного максимального
значения, после чего при дальнейшем
увеличении тормозного момента вращающий
момент резко уменьшается, и двигатель
останавливается.
Скольжение
заторможенного двигателя равно единице.
Говорят, что двигатель работает в режиме
короткого замыкания.
Частота вращения ненагруженного
асинхронного двигателя n2 приблизительно равна синхронной частоте
n1.
Скольжение ненагруженного двигателя
S &asimp; 0. Говорят, что двигатель работает
в режиме холостого хода.
Скольжение асинхронной машины,
работающей в режиме двигателя, изменяется
от нуля до единицы.
Асинхронная машина может работать
в режиме генератора. Для этого ее ротор
необходимо вращать сторонним двигателем
в направлении вращения магнитного поля
статора с частотой n2 > n1.
Скольжение асинхронного генератора .
Асинхронная машина
может работать в режиме электромашинного
тормоза. Для этого необходимо ее ротор
вращать в направлении, противоположном
направлению вращения магнитного поля
статора.
В этом режиме
S > 1. Как правило, асинхронные машины
используются в режиме двигателя.
Асинхронный двигатель является наиболее
распространенным в промышленности
типом двигателя. Частота вращения поля
в асинхронном двигателе жестко связана
с частотой сети f1 и числом пар полюсов статора. При частоте
f1 = 50 Гц существует следующий ряд частот
вращения.
P | 1 | 2 | 3 | 4 |
n1, об/мин | 3 000 | 1500 | 1000 | 750 |




где Фm — максимальное значение основного
магнитного потока, сцепленного
со статорной и роторной обмотками;
W1 и W2 — числа витков статорной и роторной
обмоток;
f1 — частота напряжения в сети; K01 и K02 — обмоточные коэффициенты статорной и
роторной обмоток. Чтобы получить более
благоприятное распределение магнитной
индукции в воздушном зазоре между
статором и ротором, статорные и роторные
обмотки не сосредоточивают в пределах
одного полюса, а распределяют по
окружностям статора и ротора. ЭДС
распределенной обмотки меньше ЭДС
сосредоточенной обмотки. Этот факт
учитывается введением в формулы,
определяющие величины электродвижущих
сил обмоток, обмоточных коэффициентов.
Величины обмоточных коэффициентов
несколько меньше единицы. ЭДС в
обмотке вращающегося ротора Ток
ротора работающей машины где
R2 — активное сопротивление роторной
обмотки; х2 — индуктивное сопротивление роторной
обмотки. где х2к — индуктивное
сопротивление заторможенного ротора. 


Вращающий
момент асинхронного двигателя 

На ротор и
полюсы статора действуют электромагнитные
вращающие моменты, одинаковые по
величине и направленные в противоположные
стороны. Мощность, необходимая для
вращения статорных полюсов с синхронной
частотой, где — угловая скорость. Механическая
мощность, развиваемая ротором, где
— угловая скорость ротора. Разность
мощностей электрические потери в
роторной обмотке; m2 — число фаз обмотки 







отора; R2 — активное сопротивление обмотки ротора; I2 – ток ротора.откуда Вращающий моментгде КТ — коэффициент трансформации двигателя с заторможенным ротором. где U1 — напряжение сети.
величина максимального вращающего момента не зависит от активного сопротивления цепи ротора;
с увеличением активного сопротивления цепи ротора максимальный вращающий момент, не изменяясь по величине, смещается в область больших скольжений
вращающий момент пропорционален квадрату напряжения сети.
Механической
характеристикой асинхронного двигателя
называется зависимость частоты вращения
двигателя от момента на валу n2 = f (M2).
Механическую характеристику получают
при условии U1 — const, f1 — const. Механическая характеристика
двигателя является зависимостью
вращающего момента от скольжения,
построенной в другом масштабе. На рис.
12.6 изображена типичная механическая
характеристика асинхронного двигателя.
С увеличением нагрузки величина момента
на валу возрастает до некоторого
максимального значения, а частота
вращения уменьшается. Как правило, у
асинхронного двигателя пусковой момент
меньше максимального. Это объясняется
тем, что в пусковом режиме, когда n2 = 0, а S = 1 асинхронный двигатель находится
в режиме, аналогичном короткому замыканию
в трансформаторе. Магнитное поле ротора
направлено встречно магнитному полю
статора.
Результирующий,
или основной, магнитный поток в воздушном
зазоре машины в пусковом режиме, а также
ЭДС в статоре и роторе Е1 и Е2 значительно уменьшаются. Это приводит
к уменьшению пускового момента двигателя
и к резкому возрастанию пускового тока.
Регулирование частоты вращения
асинхронных двигателей.
Реверсирование
асинхронного двигателя Из формулы
видно, что частоту вращения асинхронного
двигателя можно менять тремя способами: 

изменением частоты питающего напряжения;
изменением числа полюсов двигателя. Для этого в пазы статора закладывают обмотку, которую можно переключать на различное число полюсов;
изменением скольжения. Этот способ можно применить в асинхронных двигателях с фазным ротором. Для этого в цепь ротора включают регулировочный реостат. Увеличение активного сопротивления цепи ротора приводит к увеличению скольжения от а, следовательно, и к уменьшению частоты вращения двигателя.
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения. Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
Механические характеристики производственных механизмов и электродвигателей
16. Механическая характеристика производственного механизма связывает…
а. ускорение и момент сопротивления
*а. угловую скорость и момент сопротивления
а. механическую и электрическую мощность
а. ускорение и угловую скорость
17. Подъёмные механизмы имеют механическую характеристику…
*а. не зависящую от скорости
а. линейно – возрастающую
а. нелинейно – возрастающую
а. нелинейно – падающую
18. Прессы имею механическую характеристику…
а. не зависящую от скорости
*а. линейно – возрастающую
а. нелинейно – возрастающую
а. нелинейно – падающую
19. Вентиляторы и насосы имеют механическую характеристику…
а. не зависящую от скорости
а. линейно – возрастающую
*а. нелинейно – возрастающую
а. нелинейно – падающую
20. Металлообрабатывающие станки имеют характеристику…
а. не зависящую от скорости
а. линейно – возрастающую
а. нелинейно – возрастающую
*а. нелинейно – падающую
21. Для выбора рационального электропривода необходимо знать…
а. механическую характеристику рабочей машины
а. механическую характеристику электродвигателя
*а. механическую характеристику рабочей машины и электродвигателя
а. нагрузочную характеристику рабочей машины
22. Механической характеристикой электродвигателя называется зависимость между…
*а. вращающим моментом электродвигателя и его угловой скоростью
а. моментом сопротивления и угловой скоростью
а. механической и электрической мощностью
а. вращающим моментом электродвигателя и моментом сопротивления
23. У всех электродвигателей скорость является…
а. возрастающей функцией момента двигателя
*а. убывающей функцией момента двигателя
а. независящей от момента двигателя
а. нет правильного ответа
24. Величина определяемая, как отношение разности моментов, развиваемых электродвигателем, к соответствующей разности угловых скоростей называется…
а. твёрдость механической характеристики
а. прочность механической характеристики
а. мягкость механической характеристики
*а. жёсткость механической характеристики
25. Механическая характеристика, при которой скорость с изменением момента остается неизменной ( называется…
*а. абсолютно жёсткая
а. жесткая
а. мягкая
а. абсолютно мягкая
26. Механическая характеристика с коэффициентом жесткости 40 — 10 называется…
а. абсолютно жёсткая
*а. жесткая
а. мягкая
а. абсолютно мягкая
27. Механическая характеристика с коэффициентом жесткости ≤ 10 называется…
а. абсолютно жёсткая
а. жесткая
*а. мягкая
а. абсолютно мягкая
28. Синхронные электродвигатели обладают…
*а. абсолютно жёсткой механической характеристикой
а. жесткой механической характеристикой
а. мягкой механической характеристикой
а. абсолютно мягкой механической характеристикой
29. Асинхронные двигатели в рабочей части механической характеристики обладают…
а. абсолютно жёсткой механической характеристикой
*а. жесткой механической характеристикой
а. мягкой механической характеристикой
а. абсолютно мягкой механической характеристикой
30. Согласно уравнению движения электропривода вращающий момент электродвигателя уравновешивается…
а. динамическим моментом
а. моментом сопротивления и моментом сил трения
*а. моментом сопротивления и динамическим моментом
а. моментом сопротивления
31. Момент, развиваемый электродвигателем, принимается положительным, если он направлен…
*а. в сторону движения электропривода
а. в сторону, обратную движению электропривода
а. по оси вращения ротора электродвигателя
а. по касательной к окружности, описываемой ротором электродвигателя
32. Если момент электродвигателя больше момента сопротивления рабочей машины, то имеет место…
а. замедление электропривода
*а. ускорение электропривода
а. работа в установившемся режиме
а. реверсирование электропривода
Характеристики и режимы работы двигателей постоянного тока
33. При установившимся режиме работы двигателя постоянного тока приложенное напряжение U уравновешивается…
а. падением напряжения в якорной цепи и ЭДС, наведённым в обмотке возбуждения
а. только падением напряжения в якорной цепи
а. ЭДС, наведенной в якоре в процессе его вращения
*а. падением напряжения в якорной цепи и ЭДС, наведенной в якоре в процессе его вращения
34. Электромеханической характеристикой электродвигателя постоянного тока называется…
а. зависимость тока статора от скорости двигателя
*а. зависимость тока якоря от скорости двигателя
а. зависимость тока статора от тока ротора
а. зависимость скорости двигателя от момента вращения
35. Характеристики электродвигателя, полученные при номинальных параметрах электродвигателя и отсутствии в его цепях добавочных сопротивлений, называются…
а. искусственными
*а. естественными
а. физическими
а. параметрическими
36. Искусственные механические характеристики двигателя постоянного тока можно получить за счет изменения…
а. только напряжения питающей сети U и магнитного потока возбуждения Ф
а. только напряжения питающей сети U и включения добавочного сопротивления R в цепь якоря двигателя
а. только магнитного потока возбуждения Ф и путем включения добавочного сопротивления R в цепь якоря двигателя
*а. напряжения питающей сети U, магнитного потока возбуждения Ф и путем включения добавочного сопротивления R в цепь якоря двигателя
37. Скорость идеального холостого хода двигателя постоянного тока не зависит от…
а. напряжения питающей сети
а. магнитного потока возбуждения
*а сопротивления якорной цепи
а. конструктивных параметров двигателя
38. При введении добавочного сопротивления в цепь якоря электродвигателя постоянного тока…
а. изменяется скорость идеального холостого хода
*а. изменяется жёсткость механической характеристики
а. изменяется скорость идеального холостого хода и жёсткость механической характеристики
а. ничего не происходит
39. При изменение напряжения питающей сети двигателя постоянного тока…
*а. изменяется скорость идеального холостого хода
а. изменяется жёсткость механической характеристики
а. изменяется скорость идеального холостого хода и жёсткость механической характеристики
а. ничего не происходит
40. При изменении магнитного потока возбуждения двигателя постоянного тока…
а. изменяется скорость идеального холостого хода
а. изменяется жёсткость механической характеристики
*а. изменяется скорость идеального холостого хода и жёсткость механической характеристики
а. ничего не происходит
41. Режим электродвигателя, при котором создаваемый им момент противодействует движению рабочей машины называется…
*а. тормозным
а. противодействующим
а. обратным
а. холостым ходом
42. Режим торможения не свойственный двигателю постоянного тока называется…
а. рекуперативное торможение
а. динамическое торможение
а. торможение противовключением
*а. сверхсинхронное торможение
43. Режим торможения возникающий во всех случаях, когда скорость вращения двигателя постоянного тока оказывается выше скорости идеального холостого хода называется…
*а. рекуперативным
а. динамическим
а. торможением противовключением
а. сверхсинхронным торможением
44. Режим торможения получаемый при отключении якоря двигателя от сети и включении его на резистор называется…
а. рекуперативным
*а. динамическим
а. торможением противовключением
а. сверхсинхронным торможением
45. Режим торможения, при котором обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием внешнего момента или сил инерции вращается в противоположную сторону, называется
а. рекуперативным
а. динамическим
*а. торможением противовключением
а. сверхсинхронным торможением
Характеристики и режимы работы асинхронных электродвигателей
46. Основными электродвигателями, которые наиболее широко используются как в промышленности, так и в агропромышленном производстве являются…
а. синхронные двигатели
а. двигатели постоянного тока независимого возбуждения
*а. асинхронные двигатели
а. двигатели постоянного тока последовательного возбуждения
47. Критическим моментом асинхронного двигателя называется момент…
а. пусковой
*а. максимальный
а. минимальный
а. номинальный
48. Скольжение асинхронного двигателя — это…
а. амплитуда колебания электродвигателя при неполной затяжке лап статора
а. мера того, насколько ротор опережает в своем вращении магнитное поле статора
а. контактное сопротивление, образующееся при скольжении щёток по контактным кольцам
*а. мера того, насколько ротор отстает в своем вращении от вращения магнитного поля статора
49. Угловая скорость вращения магнитного поля статора обозначается…
*а. ω0
а. ω
а. φ
а. S
50. Скорость вращения магнитного поля статора зависит…
а. от напряжения и числа пар полюсов
*а. от частоты тока питающей сети и числа пар полюсов двигателя
а. только от числа пар полюсов двигателя
а. только от частоты тока питающей сети
51. Искусственные механические характеристики асинхронных двигателей не получают с помощью…
а. изменения напряжения питающей сети
а. изменения частоты тока питающей сети
*а. изменения момента сопротивления
а. введения добавочных сопротивлений
52. момент, развиваемый двигателем, изменяется…
а. пропорционально частоте
а. обратно пропорционально силе тока
а. пропорционально скорости двигателя
*а. пропорционально квадрату напряжения
53. Изменение напряжения сети влияет на…
*а. момент двигателя и не влияет на его критическое скольжение
а. критическое скольжение и не влияет на момент двигателя
а. момент двигателя и на его критическое скольжение
а. не влияет не на момент двигателя не на его критическое скольжение
54. Добавочные сопротивления вводят в цепь статора…
а. только для уменьшения пусковых значений тока
*а. для уменьшения пусковых значений тока и момента
а. только для уменьшения пусковых момента
а. только для увеличения пускового момента
55. При введении добавочного сопротивления в цепь статора асинхронного двигателя не изменяется…
а. момент пусковой
а. момент критический
*а. синхронная скорость
а. критическая скорость
56. Включение добавочного сопротивления в цепь ротора асинхронного двигателя…
а. возможно для двигателя с короткозамкнутым ротором
а. возможно для двигателей с короткозамкнутым и фазным ротором
а. невозможно
*а. возможно для двигателя с фазным ротором
57. При включении добавочного сопротивления в цепь ротора асинхронного двигателя остаётся неизменным…
*а. критический момент
а. пусковой момент
а. критическое скольжение
а. номинальный момент
58. Механическая характеристика асинхронного двигателя строится по…
а. трём точкам
*а. пяти точкам
а. шести точкам
а. двум точкам
2.3. Механические характеристики исполнительных органов и электродвигателей
При рассмотрении работы электродвигателя, приводящего в действие исполнительный орган, необходимо выявить соответствие механических характеристик двигателя характеристикам исполнительных органов. Поэтому для правильного проектирования и экономической эксплуатации электропривода необходимо изучить эти характеристики.
Зависимость между скоростью и приведенным к валу
двигателя моментом сопротивления
исполнительного органа  называют
механической характеристикой
исполнительного органа.
называют
механической характеристикой
исполнительного органа.
Эмпирическая формула для механической характеристики имеет вид [1]:
 ,
(2.6)
,
(2.6)
где  –
момент сопротивления ИО при скорости
–
момент сопротивления ИО при скорости  ;
;
 –момент сопротивления
трения в движущихся частях ИО;
–момент сопротивления
трения в движущихся частях ИО;
 –момент сопротивления
при номинальной скорости
–момент сопротивления
при номинальной скорости  ;
;
 –показатель
степени, характеризующий изменение
момента сопротивления при изменении
скорости.
–показатель
степени, характеризующий изменение
момента сопротивления при изменении
скорости.
Приведенная формула (2.6) позволяет классифицировать механические характеристики исполнительных органов на следующие основные категории.
1. Не зависящая от скорости механическая характеристика (прямая 1 на рис. 2.2.). При этом х = 0 и момент сопротивления не зависит от скорости. Такой характеристикой обладают все подъемные установки, механизмы подач металлорежущих станков, поршневые насосы при неизменной высоте подачи, конвейеры с постоянной массой передвигаемого материала и т.д., а также все ИО, у которых основным моментом сопротивления является момент сопротивления трения.
2. Линейно-возрастающая механическая
характеристика (прямая 2 на
рис. 2.2.).
В этом случае  =1
и момент сопротивления линейно зависит
от скорости
=1
и момент сопротивления линейно зависит
от скорости  .
Такая характеристика получается,
например, в приводе генератора постоянного
тока с независимым возбуждением, если
последний будет работать на постоянный
внешний резистор.
.
Такая характеристика получается,
например, в приводе генератора постоянного
тока с независимым возбуждением, если
последний будет работать на постоянный
внешний резистор.
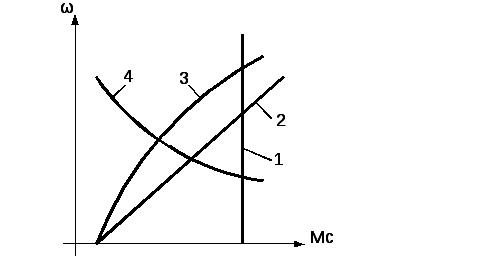
Рис. 2.2. Механические характеристики исполнительных органов
3. Нелинейно-возрастающая
(параболическая) механическая
характеристика (кривая 3 на рис.2.2.). Этой
характеристике соответствует  =2;
момент сопротивления здесь зависит от
квадрата скорости. По характеристике
3 работают все исполнительные органы
центробежного типа (насосы, вентиляторы,
компрессоры, дымососы, гребные винты и
т.д.).
=2;
момент сопротивления здесь зависит от
квадрата скорости. По характеристике
3 работают все исполнительные органы
центробежного типа (насосы, вентиляторы,
компрессоры, дымососы, гребные винты и
т.д.).
4. Нелинейно-спадающая
(гиперболическая) механическая
характеристика (кривая 4 на рис. 2.2). При
этом х = –1 и момент сопротивления  изменяется обратно пропорционально
скорости.
изменяется обратно пропорционально
скорости.
Механическую характеристику вида 4 имеют механизмы главного движения токарных, фрезерных и других станков, различные наматывающие устройства.
Механической характеристикой
электродвигателя вращательного движения
называется зависимость его угловой
скорости от развиваемого им момента,
т.е.  .
.
Естественной называется механическая характеристика двигателя, которая соответствует основной схеме включения двигателя, номинальным параметрам питающего напряжения и отсутствию в электрических цепях дополнительных элементов (например, резисторов). В противном случае электродвигатель будет иметь искусственную (регулировочную) характеристику. Искусственных характеристик у электродвигателя может быть много.
На рисунке 2.3 показаны естественные характеристики наиболее распространенных электродвигателей вращательного движения:
– двигателя постоянного тока независимого возбуждения;
– двигателя постоянного тока последовательного возбуждения;
– асинхронного двигателя;
4 – синхронного двигателя.
Для оценки жесткости механической характеристики двигателя вводится понятие жесткости, которое определяется как [1,4]
 ,
(2.7)
,
(2.7)
Используя этот
показатель, характеристику синхронного
двигателя (прямая 4 на рис. 2.3) можно
назвать абсолютно
жесткой ( ),
двигателя постоянного тока с независимым
возбуждением (прямая 1) –жесткой (
),
двигателя постоянного тока с независимым
возбуждением (прямая 1) –жесткой ( ),
а с последовательным возбуждением
(кривая 2) –мягкой (
),
а с последовательным возбуждением
(кривая 2) –мягкой ( ).
).
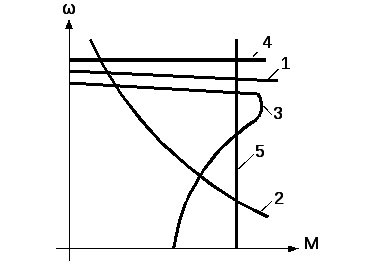
Рис. 2.3. Естественные механические характеристики электродвигателя
Характеристика асинхронного двигателя (кривая 3) имеет переменную жесткость – на рабочем участке жесткость отрицательна и незначительна по модулю, в области критического момента она равна нулю, а при меньших скоростях – положительна и невелика.
Характеристика 5 – абсолютно мягкая механическая
характеристика ( ).
Момент двигателя с изменением угловой
скорости остается неизменным. Такой
характеристикой обладают, например,
двигатели постоянного тока независимого
возбуждения при питании их от источника
тока или при работе в замкнутых системах
электропривода в режиме стабилизации
тока якоря.
).
Момент двигателя с изменением угловой
скорости остается неизменным. Такой
характеристикой обладают, например,
двигатели постоянного тока независимого
возбуждения при питании их от источника
тока или при работе в замкнутых системах
электропривода в режиме стабилизации
тока якоря.
Понятие жесткости может быть применено к механическим характеристикам исполнительных органов. Эти характеристики можно оценивать жесткостью
 .
(2.8)
.
(2.8)
Тогда для
характеристики 1 (рис.2.2)  ,
для характеристик 2 и 3
,
для характеристик 2 и 3 ,
а для характеристики 4
,
а для характеристики 4 .
.
Понятие об электромеханических и механических характеристиках электродвигателей, их жесткости и режимы работы эмп
65

Подставив сюда выражения собственных и взаимных индуктивностей неявнополюсной машины, уравнение электромагнитного момента можно получить в виде:
 .
.
В электрическом двигателе осуществляется связь механического движения привода и механизма с электрическими процессами в системе управления приводом и наоборот, которая объединяет механическую и электрическую часть электропривода в единую электромеханическую систему. Различные проявления этой связи называют электромеханической связью.
Представим уравнения электрического равновесия в следующем виде (после подстановки L и дифференцирования):
 .
.
где —  — угловая скорость ротора машины; второй
член уравнения – результирующая ЭДС
самоиндукции и взаимной индукции
вызванная изменением токов в обмотках
в результате вращения ротора.
— угловая скорость ротора машины; второй
член уравнения – результирующая ЭДС
самоиндукции и взаимной индукции
вызванная изменением токов в обмотках
в результате вращения ротора.
ЭДС вращения зависит от скорости движения ротора. Изменение этой скорости, вызванное процессами механической части электропривода, вызывает изменение токов в обмотках. Это явление и представляет собой электромеханическую связь, вследствие которой при питании двигателя от источника напряжения существует зависимость токов силовой цепи электропривода от его скорости. Так как токи iiблагодаря этой связи зависят от скорости ротора двигателя, то и его электромагнитный моментМтакже зависит от скорости. Связь эта характеризуется зависимостями:
 или
или ;
;
 или
или .
.
Первые зависимости являются электромеханическими, а вторые – механическими характеристиками двигателя.
Уравнения электрического равновесия,
записанные выше для Ui,
выражают связь между функциями и
и в
динамических процессах электромеханического
преобразования энергии и представляет
собой обобщенное математическое описание
электромеханических характеристик
двигателя во всех режимах работы. Поэтому
они являются уравнениями электромеханической
характеристики двигателя.
в
динамических процессах электромеханического
преобразования энергии и представляет
собой обобщенное математическое описание
электромеханических характеристик
двигателя во всех режимах работы. Поэтому
они являются уравнениями электромеханической
характеристики двигателя.
Е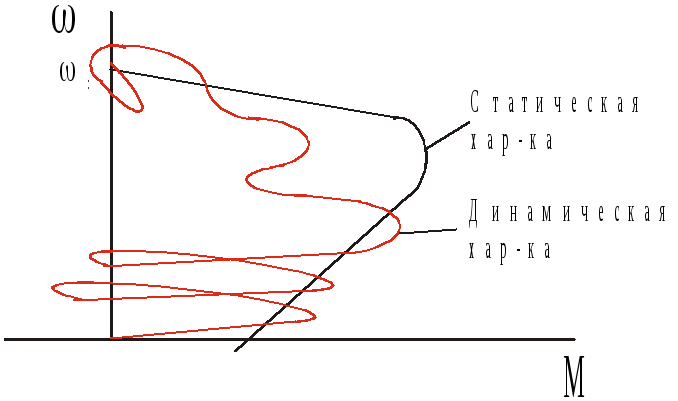 сли
эти уравнения дополнить уравнением
электромагнитного момента двигателя,
то полученная система уравнений является
обобщенным математическим описанием
механических характеристик двигателя
во всех режимах работы. Поэтому они
являются уравнениями механической
характеристики.
сли
эти уравнения дополнить уравнением
электромагнитного момента двигателя,
то полученная система уравнений является
обобщенным математическим описанием
механических характеристик двигателя
во всех режимах работы. Поэтому они
являются уравнениями механической
характеристики.
В зависимости от режима работы электромеханические и механические характеристики разделяются на статические и динамические. Статические характеристики соответствуют статическим (установившимся) режимам работы, а динамические – динамическим. Уравнения статических характеристик получаются из общих уравнений динамики (для UiиМ) путем подстановки в них параметров, соответствующих статическим режимам.
Графически динамическая механическая характеристика представляет собой геометрическое место точек на плоскости (,М), каждая из которых соответствует определенному моменту времени. Статическая механическая характеристика представляет собой геометрическое место точек на плоскости (,М), соответствующих установившемуся режиму работы. В качестве примера на рис. изображены статическая и динамическая механические характеристики асинхронного двигателя (для режима пуска) в холостую.
При изменении нагрузки на валу двигателя скорость его изменяется. Величиной, характеризующей степень ее изменения, является жесткость механической характеристики.
С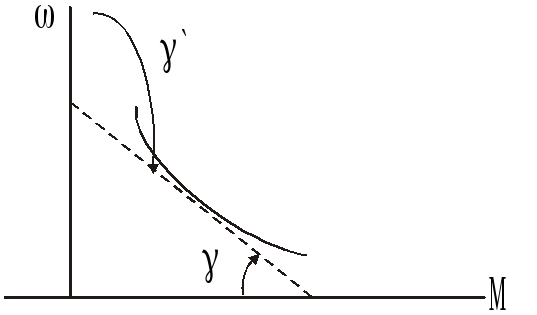 татическая
жесткость характеристики определяется
как отношение приращения момента к
приращению скорости, т.е.
татическая
жесткость характеристики определяется
как отношение приращения момента к
приращению скорости, т.е. .
Понятием жесткости оценивается форма
механической характеристики. Это понятие
применимо и для оценки формы механической
характеристики производственных
механизмов. Графически жесткость
определяетсяctgугла
наклона между касательной к характеристике
и осью моментов, т.е.
.
Понятием жесткости оценивается форма
механической характеристики. Это понятие
применимо и для оценки формы механической
характеристики производственных
механизмов. Графически жесткость
определяетсяctgугла
наклона между касательной к характеристике
и осью моментов, т.е. или
или .
.
Угол отсчитывается по часовой стрелке. Здесьmиmм– масштабы скорости и момента. Статические характеристики могут иметь положительную и отрицательную жесткость. Если при увеличении нагрузки скорость уменьшается – жесткость характеристики отрицательна и наоборот.
Статические электромеханические и
механические характеристики не позволяют
судить о электромеханических свойствах
двигателя и электропривода в динамических
режимах, т.к. жесткая и даже абсолютно
жесткая статическая характеристика в
установившемся динамическом режиме
работы электропривода превращается в
мягкую или имеющую переменную жесткость.
Поэтому для суждения о жесткости
механической характеристик двигателя
или электропривода в динамических
режимах используется понятие динамической
жесткости. Модуль динамической жесткости
определяется как отношение амплитуд
установившихся гармонических колебаний
момента и угловой скорости относительно
средних значений.  придин0.
придин0.
В операторной форме (здесь
операторной форме (здесь )
:
)
: .
.
Это выражение свидетельствует о том, что gпредставляет собой передаточную функцию ЭМП, если входным параметром принять скорость двигателя(p), а выходным – электромагнитный моментМ(p).
Рассмотрим теперь возможные режимы работы ЭМП и ограничения, накладываемые на протекание этих режимов.
О сновным
режимом работы ЭМП и двигателя является
двигательный при котором мощностьРс,
потребляемая из сети, в основном
преобразуется в механическуюРмех,
а остальная частьРтеряется в виде тепла в обмотках и стали
машины.
сновным
режимом работы ЭМП и двигателя является
двигательный при котором мощностьРс,
потребляемая из сети, в основном
преобразуется в механическуюРмех,
а остальная частьРтеряется в виде тепла в обмотках и стали
машины.
К тормозным режимам относятся режимы:
а) рекуперативного торможения;
б) противовключения;
в) динамического торможения.
Все тормозные режимы являются генераторными.
В режиме рекуперативного торможения Рмех, поступающая с вала механизма, преобразуется в электрическую и отдается в сеть за исключением потерьРв стали и обмотках.
В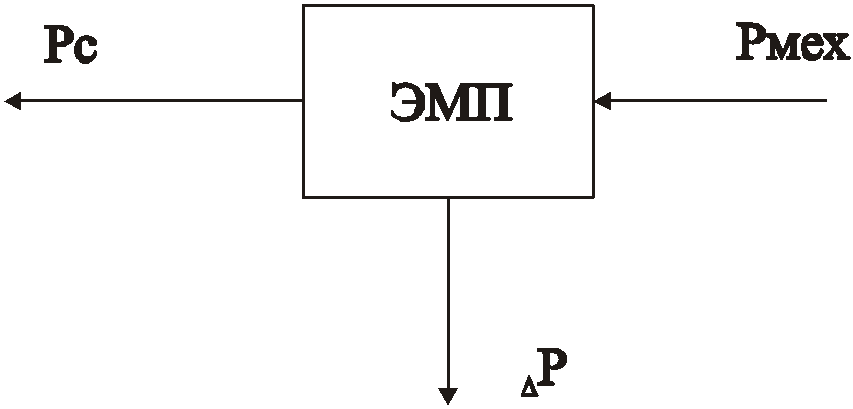 режиме противовключения электромагнитный
момент двигателя действует против
направления вращения ротора (якоря)
двигателя. При этом двигатель потребляет
мощностьРс из сети и с вала механизмаРмехи вся она теряется в виде
тепла в сопротивлениях двигателя и
стали.
режиме противовключения электромагнитный
момент двигателя действует против
направления вращения ротора (якоря)
двигателя. При этом двигатель потребляет
мощностьРс из сети и с вала механизмаРмехи вся она теряется в виде
тепла в сопротивлениях двигателя и
стали.
В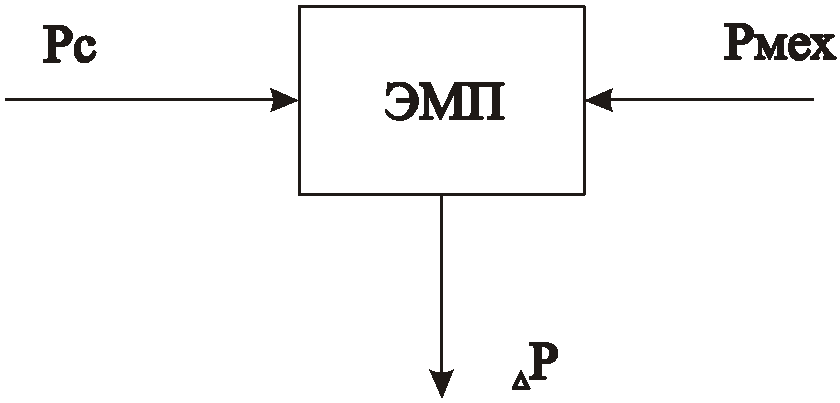 режиме динамического торможения
двигатель отключен от сети и работает
автономным генератором. Вся механическая
мощностьРмех, поступающая с
вала механизма, преобразуется в
электрическую и рассеивается в виде
тепла в обмотках и стали машины.
режиме динамического торможения
двигатель отключен от сети и работает
автономным генератором. Вся механическая
мощностьРмех, поступающая с
вала механизма, преобразуется в
электрическую и рассеивается в виде
тепла в обмотках и стали машины.
Процессы электромеханического преобразования энергии сопровождаются потерями энергии, вызывающими нагрев машины, повышение температуры нагрева. Максимально допустимаяtнагрева двигателя ограничивается теплостойкостью изоляции его обмоток, т.к. превышение допустимойtрезко сокращает срок службы изоляции. Поэтому одно из ограничений, накладываемых на процесс электромеханического преобразования энергии – ограничение по нагреву. Нагрузка двигателя по току, мощности, моменту не должна превышать значений, при которых рабочая температура двигателя может превышать допустимую. Допустимая по нагреву нагрузка двигателя называется номинальной и указывается в паспортных и каталожных данных. К числу номинальных данных относятся:PH,IH,UH,fH,H,H,cosH.
Ограничения по нагреву не исключают возможности кратковременной перегрузки двигателя, т.е. превышения номинальной нагрузки, т.к. за время кратковременной перегрузки tдвигателя заметно измениться не может.
Различают перегрузочную способность двигателя по току Iи по моментуМ:
 :
: ,
,
где Мдоп,Iдоп,Мн,Iн– максимально допустимые и номинальные моменты и токи.
Перегрузочная способность двигателей
постоянного тока ограничивается
условиями коммутации, допустимой
степенью искрения и скоростью изменения
тока якоря  .
Перегрузочная способность двигателей
переменного тока выше. При этом значениеМдопограничивается наибольшим
моментом, который машина способна
развить при номинальном напряжении,
номинальной частоте и номинальном
возбуждении (для синхронных машин).
Обычно при оценкеМдопследует
учитывать допустимое по нормам снижение
напряжения сети относительно его
номинального значения.
.
Перегрузочная способность двигателей
переменного тока выше. При этом значениеМдопограничивается наибольшим
моментом, который машина способна
развить при номинальном напряжении,
номинальной частоте и номинальном
возбуждении (для синхронных машин).
Обычно при оценкеМдопследует
учитывать допустимое по нормам снижение
напряжения сети относительно его
номинального значения.
Перегрузочная способность двигателей постоянного тока общего назначения по моменту не должна быть меньше 2,5. Для крановых и металлургических двигателей постоянного тока в зависимости от способа возбуждения и мощности Мнаходится в пределах 2,55,5.
Перегрузочная способность двигателей постоянного тока по току составляет 1,5 3,6, а для двигателей с гладким якорем 68.
Перегрузочная способность асинхронных двигателей при UHиfHограничивается величиной критического момента. Для к.з. двигателей общепромышленного примененияМ= 1,72,2, для двигателей с фазным роторомМ= 1,74, а для крановых и металлургических двигателей более 2,3 и дается в справочниках и каталогах. Учитывая возможное понижение напряжения сети до 0,9UН, при расчетах следует братьМ= 0,8М.
Мгновенная перегрузочная способность синхронных двигателей по моменту обычно равна М= 2,53, а за счет форсирования возбуждения может быть доведена доМ = 3,54.
Электромеханические свойства электродвигателей
3.1 Естественные и искусственные электромеханические и механические характеристики двигателя постоянного тока независимого возбуждения
П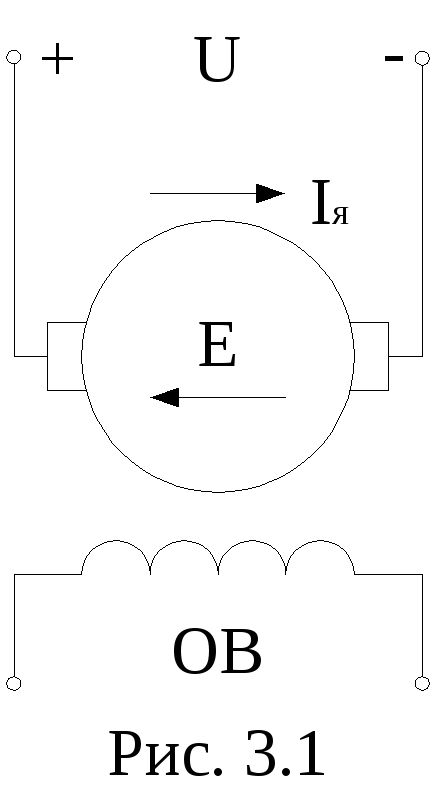 ринципиальная
схема двигателя независимого возбуждения
(ДНВ) изображается так, как показано на
рис. 3.1.
ринципиальная
схема двигателя независимого возбуждения
(ДНВ) изображается так, как показано на
рис. 3.1.
Обмотка возбуждения (ОВ) питается от независимого источника постоянного тока. При подключении ОВ к обмотке якоря машина превращается в двигатель параллельного возбуждения. Для регулируемых электроприводов обычно используется ДНВ.
Процессы электромеханического преобразования энергии ДНВ описываются следующими уравнениями.


Здесь 
 –электромагнитная
постоянная обмотка возбуждения
–электромагнитная
постоянная обмотка возбуждения  .
.
 –электромагнитная
постоянная обмотка якоря
–электромагнитная
постоянная обмотка якоря  .
.
К
– конструктивный коэффициент, равный  ,
где
,
где
N – число активных проводников обмотки якоря;
 –число
пар полюсов машины;
–число
пар полюсов машины;
a – число пар параллельных ветвей обмотки якоря;
 –ЭДС
вращения якоря;
–ЭДС
вращения якоря;
 –коэффициент
ЭДС машины;
–коэффициент
ЭДС машины;
 –сопротивление
обмотки якоря;
–сопротивление
обмотки якоря;
 –сопротивление
обмотки добавочных полюсов;
–сопротивление
обмотки добавочных полюсов;
 –сопротивление
компенсационной обмотки (для машины
мощностью 100 и выше кВт).
–сопротивление
компенсационной обмотки (для машины
мощностью 100 и выше кВт).
Обычно ДНВ работает при Ф=Фн=const. При этом выше написанные уравнения линеаризуются и после преобразований (решение относительно скорости ω) получим уравнение электромеханической характеристики.
Выразив
ток якоря через момент  ,
получим уравнение механической
характеристики
,
получим уравнение механической
характеристики

В
установившимся режиме  .
Поэтому уравнения запишутся в следующем
виде:
.
Поэтому уравнения запишутся в следующем
виде:

Эти
уравнения показывают, что при U=Uя=const
и ф=const
характеристики являются прямыми с
начальной ординатой  ,
соответствующей скорости идеального
холостого хода двигателя (рис. 3.2).
,
соответствующей скорости идеального
холостого хода двигателя (рис. 3.2).
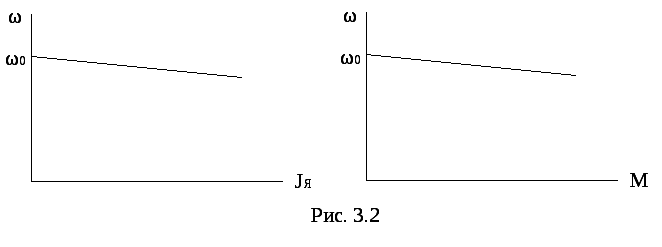
Характеристики, соответствующие отсутствию в цепи якоря добавочного сопротивления, являются естественными. Статическую жесткость характеристики, определяющую ее наклон, можно найти, продифференцировав выражение момента М по скорости ω, найдя предварительно М из уравнения механической характеристики.
 ;
; 
Модуль статической жесткости

Используя понятие жесткости, уравнение статической механической характеристики ДНВ можно представить в виде:
Чем больше модуль жесткости естественной механической характеристики, тем стабильнее является скорость ω электропривода при широких пределах изменения его нагрузки.
Другой оценкой стабильности рабочей скорости ω является статизм механической характеристики, количественной оценкой которого служит номинальный перепад скорости.
 ,
где
,
где
 –скорость
идеального холостого хода на естественной
характеристике.
–скорость
идеального холостого хода на естественной
характеристике.
Относительный перепад скорости для двигателей

большой мощности составляет (1,53)%.
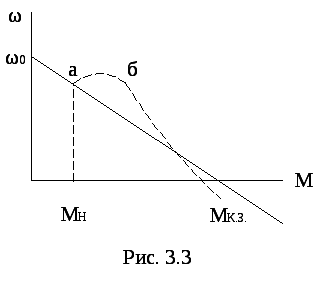
На вид естественных механической и электромеханический характеристик значительное влияние оказывает реакция якоря, ослабляющая магнитный поток машины. Из-за ее размагничивающего действия в механической характеристике двигателя могут появиться участки с положительной жесткостью (рис. 3.3, участок а-б), что приводит к неустойчивости электропривода.
Реакция якоря, может снизить магнитный поток двигателя на 10-20%, вследствие чего уменьшится его перегрузочная способность. Она неблагоприятно сказывается и на динамических свойствах электропривода. Поэтому в двигателях без компенсационной обмотки мощностью до 100 кВт применяют так называемую стабилизирующую обмотку, размещаемую на сердечниках главных полюсов. Она включается цепь якоря последовательно и создает небольшую МДС, компенсирующую действие реакции якоря. Но двигатели с такой обмоткой нельзя применять для реверсивных электроприводов, т.к. при изменении направления вращения ток якоря имеет противоположное направление, и стабилизирующая обмотка будет усугублять действие реакции якоря.
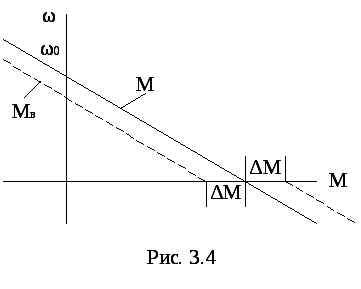
Отметим,
что механическая характеристика ДНВ
представляет собой зависимость
от электромагнитного момента М двигателя.
Если же изобразить зависимость
от момента на валу, то это будет не
прямая, а ломанная (рис. 3.4). В двигательном
режиме  ,
а в тормозном (генераторном)
,
а в тормозном (генераторном) (пунктирная линия). При=0
возникает разрыв непрерывности. Это
создает неудобства при расчетах. Поэтому
момент
(пунктирная линия). При=0
возникает разрыв непрерывности. Это
создает неудобства при расчетах. Поэтому
момент  прибавляют к нагрузке (кМс)
и характеристику двигателя считают
линейной.
прибавляют к нагрузке (кМс)
и характеристику двигателя считают
линейной.
Часто для удобства расчетов уравнение механической характеристики представляют в относительных единицах. Характеристики двигателей, различных по своим номинальным данным, становятся универсальными. В относительных единицах напряжение, ЭДС, ток, момент, магнитный поток, скорость можно представить в следующем виде:

(для
двигателей последовательного и смешанного
возбуждения  ),
), ,
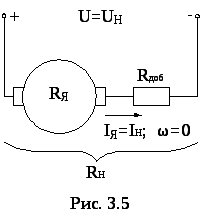
где
,
где – номинальное сопротивление, т.е.
сопротивление якорной цепи, которое
при приложении к якорю номинального
напряжения и ω=0 ограничивает ток в якоре
до
– номинальное сопротивление, т.е.
сопротивление якорной цепи, которое
при приложении к якорю номинального
напряжения и ω=0 ограничивает ток в якоре
до  (см. рис. 3.5).
(см. рис. 3.5).
Для написания уравнения механической характеристики относительных единицах разделим обе части уравнения механической характеристики на ω0.
 ,
отсюда
,
отсюда
 .
.
т.е. 
Т.к.
у ДНВ при Ф=const
МIя,
то  и
и .
.
Это уравнение электромеханической характеристики в относительных единицах.
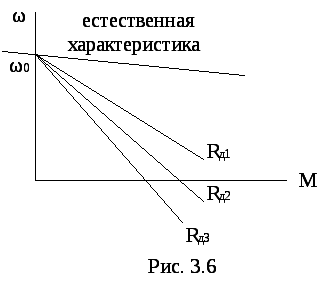
Характеристики двигателя, соответствующие изменениям параметров двигателя или специальным схемам его включения, являются искусственными. Так, при введении в цепь якоря добавочного сопротивления наклон характеристик увеличивается, их жесткость уменьшается. Семейство механических характеристик, соответствующих различным значениям Rдоб, изображено на следующем рис. 3.6. Скорость якоря двигателя при этом уменьшается, ибо увеличивается падение напряжения на якоре, уменьшается ток, а следовательно и вращающий момент. Отсюда видна возможность регулирования скорости двигателя изменением сопротивления в якорной цепи.
При
изменении напряжения, подводимого
двигателю, изменяется скорость идеального
холостого хода  ,
а жесткость характеристик остается
неизменной. Семейство механических
характеристик, соответствующих различным
напряжениям на якоре, изображено на
рис. 3.7. Для получения таких характеристик
двигатель нужно питать от источника,
напряжение которого можно регулировать.
Это позволяет регулировать скорость
двигателя.
,
а жесткость характеристик остается
неизменной. Семейство механических
характеристик, соответствующих различным
напряжениям на якоре, изображено на
рис. 3.7. Для получения таких характеристик
двигатель нужно питать от источника,
напряжение которого можно регулировать.
Это позволяет регулировать скорость
двигателя.
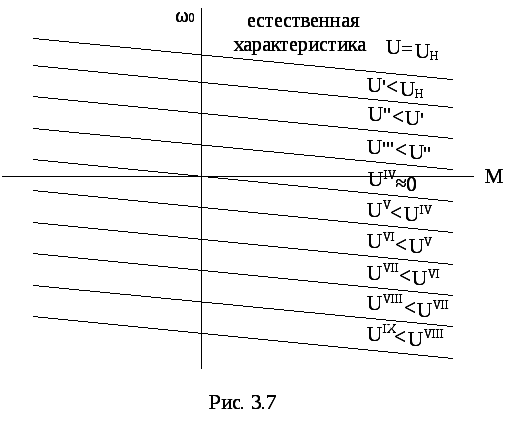
Для ряда производственных механизмов в соответствие с требованиями технологического процесса иногда возникает необходимость увеличения рабочей скорости, превышающей скорость при U= UН и φ=φН. Этого достигается ослаблением магнитного потока двигателя (уменьшением тока возбуждения).
Если
уменьшенное значение магнитного потока,
равно  ,
где<1,
то новое, увеличенное значение скорости
идеального холостого хода будет
,
где<1,
то новое, увеличенное значение скорости
идеального холостого хода будет
 .
.
При ослабленном потоке и прежнем значении момента ток якоря увеличивается. Его можно найти из уравнения момента
 ,
откуда
,
откуда
Уравнение механической характеристики при ослабленном потоке будет
 ,
где
,
где
 –перепад
скорости при номинальном потоке.
–перепад
скорости при номинальном потоке.
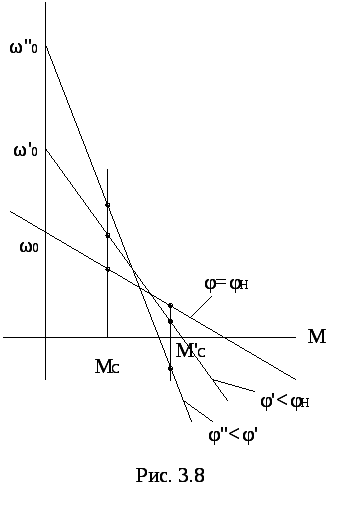
Ослабление потока вызывает увеличение не только 0, но и скорости якоря двигателя (при нагрузках, допустимых по условиям коммутации), что, собственно, и требуется. Но при нагрузках, не допустимых по условиям коммутации, скорость будет уменьшаться, и двигатель может перейти в тормозной режим, что отраженно на рис. 3.8, где изображено семейство механических характеристик двигателя, соответствующих различным значениям магнитного потока.