


Тяговый электродвигатель: устройство и принцип работы
Содержание:
- Появление и развитие тяговых устройств
- Коллекторный агрегат на постоянном токе
- Назначение и устройство станины
- Главные полюса
- Назначение и устройство добавочных полюсов
- Якорь и коллектор
- Тяговые агрегаты асинхронного типа
- Видео
Существующие электрические машины способны выполнять множество разных функций. Они преобразуют механическую энергию в электрический ток и наоборот. Подавляющее большинство электрических устройств работают по простой схеме: под действием механической энергии вырабатывается электричество, которое в свою очередь вызывает движение станков, машин, механизмов, подвижного состава. В транспортной отрасли хорошо известен тяговый электродвигатель, приводящий в действие колесные пары вагонов.
Использование этих устройств в режиме генератора дает возможность затормозить состав. Процесс торможения происходит за счет нагрузки, образующейся в процессе превращения механической энергии состава, находящегося в движении, в электрический ток.
Появление и развитие тяговых устройств
В самом начале, когда электрический транспорт только начал использоваться, на всех видах подвижного состава устанавливались коллекторные тяговые электродвигатели. При этом передача энергии осуществлялась по самой простой схеме, поэтому агрегатами можно было легко управлять в любом рабочем режиме. Технические и механические характеристики полностью отвечали всем требованиям транспортной специфики.

Тем не менее, в процессе эксплуатации тяговый электродвигатель постоянного тока обнаружил ряд недостатков. В первую очередь, это сам коллектор, оборудованный подвижными контактами – щетками, требующий регулярного технического обслуживания. Принимаемые меры по снижению искрения, повышению надежности коммутации, во многом усложнили устройство двигателя. В результате, его размеры заметно увеличились, а максимальная скорость вращения осталась на прежнем уровне.
Постепенно развивалось направление силовой техники на основе быстродействующих полупроводников. Это позволило заменить реостатную систему, применяемую в коллекторных агрегатах, импульсной, отличающейся повышенной надежностью и экономичностью. В дальнейшем, в вагонных парах стал устанавливаться асинхронный тяговый двигатель в качестве приводного механизма.

Основными проблемами, с которыми пришлось столкнуться при эксплуатации асинхронных двигателей, считаются сложные регулировки. Определенные трудности возникают при использовании электрического торможения, когда для этих целей служат моторы на основе короткозамкнутого ротора. В данный период идет разработка более современных тяговых приводов на основе синхронных агрегатов, в которых установлен ротор на постоянных магнитах.
Поскольку на железнодорожном транспорте до сих пор широко используются именно коллекторные агрегаты, следует более подробно рассмотреть их общее устройство и порядок работы.
Коллекторный агрегат на постоянном токе
Основным источником питания коллекторных движков служит постоянный ток. Сейчас уже выпускаются модификации многофункциональных агрегатов с невысокой мощностью, способных работать не только от постоянного, но и от переменного тока.
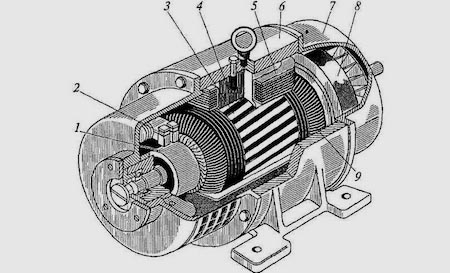
Стандартный тяговый электродвигатель состоит из коллектора (1), щеток (2), сердечника ротора или якоря (3), сердечника главного полюса (4), обмотки возбуждения (5), станины (6). Кроме того, сюда же включены подшипниковый щит (7), вентилятор (8), якорная обмотка (9).
Все детали соединяются в несколько конструктивных элементов. Прежде всего, это магнитная система, под влиянием которой появляется магнитное поле, а также якорь с обмоткой, вращающийся с помощью подшипников. Коллектор и другие детали разъединяются между собой воздушной прослойкой.
В агрегатах постоянного тока возникновение магнитного поля происходит с участием обмоток возбуждения. Они располагаются на полюсных сердечниках и подключены к постоянному току. Количество полюсов может быть разным, в зависимости от мощности двигателя и его использования в транспортной единице. Их число чаще всего находится в рамках от 2 до 12. Стандартная магнитная система представляет собой монолитную металлическую станину, в которой присутствуют съемные шихтованные сердечники. Чтобы понять, как взаимодействуют узлы и детали между собой, необходимо более подробно рассмотреть устройство каждого компонента.
Назначение и устройство станины
Каждый тяговый электродвигатель оборудуется станиной, используемой прежде всего в качестве магнитопровода, по которому осуществляется прохождение магнитных потоков основных и дополнительных полюсов. Еще она служит местом расположения и крепления полюсов и подшипниковой защиты.
При наличии больших нагрузок станина обычно бывает отлита из стали или сварена из толстых электротехнических стальных листов. Благодаря такой конструкции создается требуемая механическая устойчивость и высокая магнитная проницаемость. Стенки обычно имеют толщину, обеспечивающую установленный уровень магнитной индукции, а ее размеры ориентированы на поперечное сечение главных полюсов и составляют не ниже 50% этого размера.

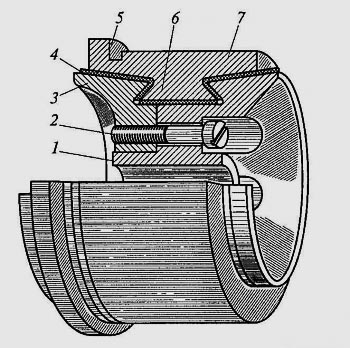
На представленном рисунке отмечено расположение станины (1), относительно других деталей и компонентов – сердечника полюса (2), катушки обмотки возбуждения (3) и полюсного башмака (4). Между всеми элементами и якорем существует воздушная прослойка (5). Размеры диаметра изнутри станины рассчитываются так, чтобы в этом пространстве мог разместиться якорь, полюса главные и дополнительные и их обмотки.
Тяговый электродвигатель локомотива может иметь стальную литую станину с уменьшенной массой и пониженным поперечным сечением, ориентированным на оси главных полюсов. Это дает возможность равномерно распределить магнитный поток, поступающий к станине от главного полюса.
Частично станина, не выполняющая функции магнитопровода, образует коллекторное пространство с незначительной толщиной стенок, достаточной для обеспечения необходимой механической прочности. В некоторых конструкциях это место закрывается отдельными ребрами жесткости, прикрытыми тонким защитным кожухом.
Главные полюса
Тяговый электродвигатель, работающий на постоянном токе, включает в свою конструкцию обмотку возбуждения, где и появляется магнитодвижущая сила, создающая, в свою очередь, магнитное поле. В состав обмотки входят катушки, надеваемые на сердечники основных полюсов. На стороне сердечника, направленной к якорю, устанавливается полюсный наконечник, он же башмак. С его помощью осуществляется равномерное распределение магнитного потока по всей поверхности якоря. Перечисленные детали отмечены на предыдущем рисунке вместе со станиной.
На практике довольно редко используется схема, включающая в себя полюсный сердечник и полюсный башмак. Как правило, они объединяются в единое целое и образуют главный полюс. За счет этого в сердечнике полюса наступает снижение вихревых потоков, вызываемых действием пульсаций магнитной индукции в наконечниках из-за зубчатой поверхности якоря.
Для сборки полюса используются стальные лакированные листы, которые затем попадают под пресс высокого давления. Сквозь сердечник пропускаются болты или специальные заклепки, чтобы стянуть всю конструкцию. Их равномерное распределение позволяет успешно выдерживать упругость сжатых полос. Крепление полюсов к станине осуществляется с помощью болтов или шпилек.
Назначение и устройство добавочных полюсов
Каждый тяговый электродвигатель мощностью более 1 кВт оборудуется дополнительными полюсами, для того чтобы снизить количество искр, появляющихся на щетках. Их устройство очень простое, включающее в себя сердечник (1) и катушку (2), где использован медный проводник в изоляции. Его сечение рассчитывается по рабочему току двигателя, поскольку эта катушка и обмотка якоря последовательно подключаются друг к другу.
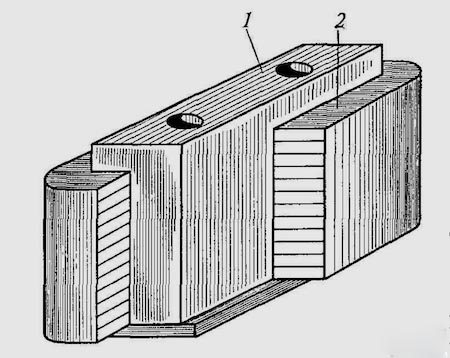
Стальной сердечник изготавливается в виде монолитной конструкции, по причине отсутствия в нем вихревых токов, так как магнитная индукция имеет очень малую величину. Местом монтажа дополнительных полюсов определен промежуток между главными полюсами, а крепление к станине выполняется специальными болтами. Величина воздушной прослойки под ними существенно превышает зазор под главными полюсами. Его регулировка выполняется при помощи специальных пластин из материалов магнитного или немагнитного типа, а окончательная величина определяется, когда тяговый двигатель постоянного тока настраивается на коммутацию при достижении минимального количества искр.
Якорь и коллектор
В состав якоря входит вал, сердечник, обмотки и коллектор. Конфигурация сердечника выполнена в форме цилиндра, а сам он изготовлен из тонких штампованных листов электротехнической стали. Для изоляции листов используется лак или бумага. В сжатом виде после сборки сердечник фиксируется нажимными шайбами. Благодаря устройству сердечника, удается компенсировать влияние вихревых токов и снизить в нем утечку электроэнергии. Охлаждение ТЭД выполняется за счет специальных каналов вентиляции, устроенных в сердечнике.
Для якорных обмоток используется медный проводник круглого или прямоугольного сечения. Он закладывается в выемки сердечника и качественно изолируется от него. Вся обмотка делится на секции, концы каждой из них соединяются с коллектором путем пайки.
В конструкцию каждого коллектора входит активная составляющая и система крепления. Изоляция медных коллекторных пластинок (7) выполняется с помощью специальных прокладок. Провода якорной обмотки припаиваются к выступу в конце элемента (5). Край пластин, расположенный снизу (6) после сборки зажимается с помощью двух нажимных колец (3). Эти кольца также изолируются, а сама изоляция утапливается на 1,5 мм внутрь скользящей поверхности коллектора.
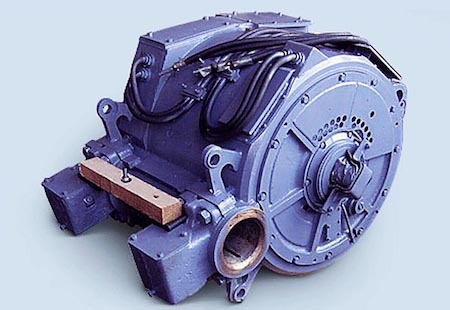
Тяговые электродвигатель асинхронного типа
На железнодорожном транспорте асинхронный тяговый двигатель долгое время не мог использоваться из-за отсутствия в электроснабжении подвижного состава переменного трехфазного тока. Постепенно развивающееся электротехническое производство позволило создать и усовершенствовать электронику полупроводникового типа.

Таким образом, были созданы преобразователи тока и напряжения, обладающие мощностью, достаточной, чтобы обеспечить энергией асинхронный тяговый двигатель. Ведущую роль в этом деле сыграли мощные транзисторы.
Данные устройства оказались просты и надежны в эксплуатации. У них заметно снизились габаритные размеры и вес в сравнении с двигателями постоянного тока. Асинхронный тяговый двигатель не требует особого технического обслуживания, способен переходить в генераторный режим без специального переключения, а лишь под действием повышенной частоты вращения ротора. Подобная схема существенно упрощает использование системы электрического торможения.
Назначение и области применения электродвигателей постоянного тока | Полезные статьи
Понравилось видео? Подписывайтесь на наш канал!Современная промышленность использует самое разнообразное оборудование, которое приводит в движение электродвигатель постоянного тока. Непрерывная работа этого узла оборудования является необходимым условием нормального функционирования других устройств или производственных линий.

Постоянные электродвигатели изготавливаются с коллекторно-щеточными узлами, через которые электрический ток подается на якорь. Существуют и бесколлекторные версии, но они используются только на специальных производствах, поскольку слишком дороги. По конструкции любой электродвигатель постоянного тока запускается возбуждением от постоянного или электрического магнита.
Принцип работы электрического двигателя постоянного тока базируется на вращении рамки, по которой протекает электрический ток в постоянном магнитном поле. В современных устройствах рамка заменена якорем с проводниками, уложенными в специальные пазы, а постоянный двухполюсный магнит — статором с четным количеством полюсов, которые представляют собой постоянные или электрические магниты. Статор образует стационарное магнитное поле с противостоящими северным и южным полюсами. При пропускании тока через якорь на провод, вставленный в него, действует сила, вращающая весь якорь. Для того чтобы движение не остановилось, коллектор, которым оборудуются постоянные электродвигатели, меняет направление тока в обмотке якоря. В результате получается эффективное устройство, преобразующее электрическую энергию в механическую.
На сегодняшний день данные устройства применяются в самых разных сферах деятельности. Электродвигатели постоянного тока, технические характеристики которых имеют широкий диапазон, могут применяться в таких бытовых приборах, как дрель, электробритва или вентилятор. В промышленности используются устройства с высокими частотами вращения в десятки тысяч оборотов в минуту с мощностью порядка нескольких мегаватт. С их помощью приводится в движение промышленное оборудование, станки, насосы трубопроводов и т. д.
Для безопасной эксплуатации электродвигатель постоянного тока каждого типа имеет несколько степеней защиты. Наиболее простой вариант — защита токоведущих и вращающихся частей от случайного прикосновения. Именно поэтому кабели, при помощи которых производится подключение устройства, должны иметь хорошую изоляцию. Сечение подводящих кабелей подбирается исходя из мощности двигателя и длины линии по специальным таблицам. Для работы в сложных условиях разработаны электродвигатели постоянного тока, технические характеристики которых включают различные степени влаго- и пылезащищенности. В некоторых случаях, например при установке устройств на предприятиях нефтеперерабатывающей промышленности, целесообразно использовать взрывозащищенные модели, которые при работе не дают искрения.
Именно поэтому кабели, при помощи которых производится подключение устройства, должны иметь хорошую изоляцию. Сечение подводящих кабелей подбирается исходя из мощности двигателя и длины линии по специальным таблицам. Для работы в сложных условиях разработаны электродвигатели постоянного тока, технические характеристики которых включают различные степени влаго- и пылезащищенности. В некоторых случаях, например при установке устройств на предприятиях нефтеперерабатывающей промышленности, целесообразно использовать взрывозащищенные модели, которые при работе не дают искрения.
Электродвигатели постоянного тока и области их применения | Полезные статьи
Электродвигатель постоянного тока (ДПТ) представляют собой механизм, преобразующий поступающую на него электрическую энергию в механическое вращение. Работа агрегата базируется на явлении электромагнитной индукции — на проводник, помещенный в магнитное поле, действует сила Ампера: F = B*I*L, где L — длина проводника, I — ток, протекающий по проводнику, B — индукция магнитного поля. Данная сила обуславливает возникновение крутящего момента, который может быть использован для неких практических целей.
Электродвигатели постоянного тока обладают следующими преимуществами:
- Практически линейные регулировочные и механические характеристики, благодаря чему обеспечивается удобство эксплуатации.
- Большая величина пускового момента.
- Компактные размеры (особенно сильно выражено у двигателей на постоянных магнитах).
- Возможность использования одного и того же механизма как в режиме двигателя, так и генератора.
- КПД при полной нагрузке, как правило, выше на 1–2 % чем у асинхронных и синхронных машин, а при неполной нагрузке преимущество может возрастать до 15 %.
Основным недостатком данных устройств является высокая цена их изготовления. Также стоит отметить необходимость регулярного обслуживания коллекторно-щеточного узла и определенное ограничение срока эксплуатации, вызванные его износом, однако на современных моделях эти недостатки практически полностью нивелированы.
Стоит отметить, что механическая характеристика, а значит, и все эксплуатационные показатели во многом зависят от схемы подключения обмотки возбуждения. Всего их четыре:
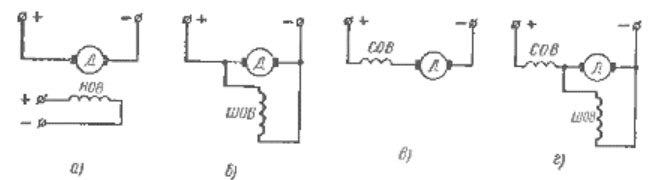
Способы возбуждения: а — независимое, б — параллельное, в — последовательное, г — смешанное.
Области применения ДПТ
Несмотря на то, что подавляющее большинство электрических сетей обеспечивают переменное напряжение, электродвигатели постоянного тока используются весьма и весьма широко. Собственно говоря, все промышленные приводы, где требуется точная регулировка частоты вращения, реализованы именно на базе ДПТ. Кроме того, электрические машины на постоянных магнитах благодаря своей эффективности и большой плотности мощности широко используются в оборонительной отрасли.
Впрочем, не стоит думать, что вы не сталкивались вживую с данными механизмами. Отсутствие жестких ограничений по размерам приводит к тому, что мы зачастую их не замечаем. Например, в автомобилестроении используются только электродвигатели постоянного тока, причем, несмотря на различие в мощности, на всем грузовом транспорте и спецтехнике они запитаны от 24 вольт, в то время как на легковых автомобилях их рабочее напряжение составляет 12 вольт. Получая энергию от аккумуляторной батареи или генератора, они отвечают за позиционирование сидений, управление зеркалами, поднятие и опускание стекол, а также поддержание в салоне заданной температуры.
Впрочем, электродвигатели постоянного тока могут и сами приводить в движение транспортные средства, и это далеко не только игрушечные автомобили-аттракционы с 12-вольтным аккумулятором. Для того чтобы ощутить, насколько мощными могут быть эти устройства, достаточно оказаться вблизи проходящей мимо пригородной электрички, а мягкость и точность регулировки оборотов наглядно демонстрирует плавный разгон троллейбусов.
Данные электродвигатели широко применяются как в электрическом транспорте (метро, троллейбус, трамвай, пригородные электрические железные дороги, электровозы), так и в подъемных устройствах (электрические подъемные краны).
Асинхронные электродвигатели. Виды и устройство. Работа
Асинхронные электродвигатели были изобретены в 1889 году. В настоящее время выпускается большой спектр электрических двигателей. Из них наибольшую популярность приобрел электродвигатель асинхронного типа, трехфазный. Половина всей электроэнергии в мире расходуется такими электродвигателями. Они нашли широкое использование во многих отраслях промышленности, в быту, электроинструменте, так как имеет невысокую стоимость, повышенную надежность, простое обслуживание и эксплуатацию.
Область использования таких электромашин становиться все шире, так как их конструкция совершенствуется. В переводе с английского такой электродвигатель называют индукционным. И это легко объяснить, так как это вид моторов, в котором явление индукции применяется для создания полюсов, другими словами, применяются наводки для образования движущей силы. Особенностью асинхронных двигателей является отличие частоты поля от скорости вращения вала. В других типах двигателей используются постоянные магниты, обмотки и т.д.
Устройство
Асинхронные электродвигатели состоят из:
- Ротора.
- Статора.
Статор, состоит из основных частей:
- Корпус. Служит для образования соединений деталей мотора. При малом размере мотора корпус цельнолитой. Материал изготовления – чугун. Могут использоваться сплавы алюминия, либо сталь. Часто в небольших двигателях функцию сердечника выполняет корпус. В больших моторах со значительной мощностью корпус имеет сварную конструкцию.
- Сердечник. Эта деталь запрессована в корпус, и предназначена для повышения магнитной индукции, изготовлена из электротехнической стали в виде пластин. Для уменьшения потерь, возникающих при вихревых токах, сердечник покрывается лаком.
- Обмотка. Она расположена в пазах сердечника. Для ее намотки применяется медная проволока, секциями, соединенными между собой по определенной схеме. Витки образуют 3 катушки, которые по сути дела играют роль обмотки статора. Эта обмотка первичная, непосредственно к ней подключается питание.
Ротор:
- Ротор – элемент двигателя, находящийся во вращении, предназначен для трансформации магнитного поля в энергию движения, состоит из частей:
- Вал. Подшипники вала находятся на его хвостовиках. При сборке двигателя подшипники запрессовываются, фиксируются болтами к крышкам корпуса.
- Сердечник. Его сборку производят на валу двигателя. Он состоит из металлических пластин электротехнической стали, которая обладает свойством малого сопротивления магнитному полю. Форма сердечника в виде цилиндра используется для укладки катушки якоря, которая называется вторичной. Она получает энергию от магнитного поля, появляющегося вокруг обмоток статора при подаче питания.
Классификация по типу ротора
С короткозамкнутым ротором.
Такой тип двигателя оснащен обмоткой в виде алюминиевых стержней, расположенных в пазах сердечника. На торце ротора они замыкаются между собой кольцами.
- С ротором, оснащенным контактными кольцами.
Оба типа моторов имеют схожую конструкцию статора. Разница состоит лишь в конструкции якоря.
Классификация по числу фаз
Асинхронные электродвигатели трехфазные являются основными типами моторов. Они оснащены 3-мя обмотками на статоре, смещены на 120 градусов, соединены между собой треугольником, либо звездой, получают питание от трех фаз переменного тока.
Асинхронные электродвигатели небольшой мощности чаще всего изготавливаются двухфазными. Они отличаются от 3-фазных моторов оснащением 2-мя обмотками на статоре, которые смещены между собой на угол 90 градусов.
В случае равенства токов по модулю, и их сдвигу по фазе на 90 градусов, действие мотора не будет иметь отличия от 3-фазного двигателя. Но такие типы двигателей чаще подключаются от однофазной сети, а искусственный сдвиг на 90 градусов образуется за счет конденсаторов.
Асинхронные электродвигатели однофазные оснащаются единственной обмоткой на статоре. Они практически не могут работать. Когда вал электродвигателя неподвижен, то при подаче питания образуется только импульсное магнитное поле, а момент вращения равен нулю. Но если ротор у такого электродвигателя принудительно раскрутить, то он сможет функционировать и приводить в действие какой-либо привод механизма.
В таком случае пульсирующее поле складывается из 2-х симметричных полей: прямого и обратного. Они образуют разные моменты: один двигательный, другой тормозной. Но двигательный момент получается больше тормозного, возникающего вследствие токов ротора высокой частоты.
В связи с этим 1-фазные моторы оснащаются второй обмоткой, применяющейся в качестве пусковой. В ее цепи для сдвига фаз подключают конденсаторы. Их емкость имеет значительную величину, и может достигать нескольких десятков мкФ при маломощном моторе, меньше 1000 ватт.
В управляющих системах применяют 2-фазные асинхронные электродвигатели, получившие название исполнительных. Они оснащены двумя обмотками статора, которые имеют сдвиг фаз на 90 градусов. Одна обмотка (возбуждения) питается от сети 50 герц, а вторая применяется в качестве управляющей.
Чтобы образовалось магнитное поле с вращающим моментом, ток в управляющей обмотке должен иметь сдвиг 90 градусов. Для регулировки скорости мотора изменяют значение тока в этой обмотке, либо меняют угол фазы. Реверсивное движение обеспечивается сменой фазы в обмотке управления на 180 градусов, с помощью переключения обмотки.
2-фазные асинхронные электродвигатели производятся в разных исполнениях:
- Короткозамкнутым ротором.
- Полым магнитным ротором.
- Полым немагнитным ротором.
Линейные моторы
Чтобы преобразовать движение вращения в поступательное движение, необходимо применение определенных механизмов. Поэтому при необходимости двигатель конструктивно выполняют таким образом, что его ротор сделан в виде бегунка с линейными движениями.
В таком случае двигатель получается развернутым. Обмотка статора такого мотора сделана, как и у обычного двигателя, но она должна быть уложена на всей длине перемещения бегунка (ротора) в пазы. Такой ротор в виде бегунка чаще бывает короткозамкнутым. К нему присоединен привод механизма. На краях статора располагают ограничители, которые не дают ротору выходить за определенные пределы.
Принцип действия
Якорь электродвигателя приводится в действие с помощью эффекта магнитного поля, возникающего в катушках статора. Для лучшего понимания принципа работы мотора, нужно освежить в памяти закон самоиндукции. Он говорит, что вокруг подключенного к питанию проводника образуется магнитное поле. Его величина прямо зависит от индуктивности проводника и потока частиц.
Также, магнитное поле образует силу, направленную в определенную сторону, которая вращает ротор мотора. Чтобы двигатель работал с достаточной эффективностью, нужно получить значительный магнитный поток. Его можно создать особой установкой первичной обмотки.
Источник напряжения выдает переменное напряжение, значит, вокруг статора магнитное поле будет с такими же свойствами, и прямо зависит от изменения тока сети. Фазы смещены между собой на 120 градусов.
Процессы в обмотке статора
Все фазы сети подключаются к катушкам статора, каждая фаза к определенной катушке. Поэтому магнитное поле будет иметь смещение на 120 градусов. Питание поступает в виде переменного напряжения, значит, вокруг катушек возникнет переменное магнитное поле.
Схема двигателя выполняется так, чтобы магнитное поле вокруг катушек постепенно менялось и переходило от одной катушки к другой. Так образуется магнитное поле с эффектом вращения. Можно определить частоту вращения, которая будет измеряться в числе оборотов вала мотора. Она вычисляется по формуле:
n = 60*f / p, где f – частота тока в сети, р – количество пар полюсов статора.
Работа ротора
Процессы во вторичной обмотке ротора, и особенность конструкции, которую имеют асинхронные электродвигатели с короткозамкнутым ротором.
К обмотке якоря напряжение не подается. Оно возникает из-за индукционной связи с первичной обмоткой. Из-за этого и происходит действие, обратное действию в статоре. Оно соответствует закону: при пересечении проводника магнитным потоком, в нем образуется электрический ток. Магнитное поле возникает вокруг первичной обмотки от того, что к ней подключается трехфазное питание.
Совместная работа ротора и статора
Мы имеем асинхронный мотор с ротором, в котором протекает электрический ток по его обмотке. Этот ток станет причиной появления магнитного поля возле обмотки якоря. Но полярность потока не будет совпадать с потоком статора. А значит, и сила, которая создается им, будет противодействовать силе магнитного поля первичной обмотки, что заставит двигаться ротор, потому что на нем выполнена вторичная обмотка, а вал закреплен на подшипниках в корпусе мотора.
Разберемся в ситуации, когда взаимодействуют силы магнитных полей ротора и статора, по истечении времени. Известно, что магнитное поле первичной катушки вращается с определенной частотой. Образованная им сила будет передвигаться с такой же скоростью. Это приводит в действие асинхронный двигатель, его ротор будет вращаться вокруг своей оси.
Подключение двигателя к питанию
Для запуска электродвигателя его нужно подключить к напряжению 3-фазного тока. Выполнить такое подключение возможно двумя методами: звездой и треугольником.
Схема звездой
Здесь изображен способ соединения треугольником.
Схемы собираются в клеммной коробке, расположенной на корпусе двигателя.
Чтобы запустить электродвигатель в обратном направлении вращения, необходимо только изменить местами две любые фазы путем перебрасывания двух проводов в коробке двигателя.
Похожие темы:
Назначение электродвигателей.
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического регулирования и управления, в быту.
Электрические машины преобразуют механическую энергию в электрическую, и наоборот. Машина, преобразующая механическую энергию в электрическую, называются генератором. Преобразование электрической энергии в механическую — осуществляется двигателями.
Любая электрическая машина может быть использована как в качестве генератора, так и в качестве электродвигателя. Это свойство электрической машины изменять направление преобразуемой ею энергии называется обратимостью машины. Электрическая машина может быть также использована для преобразования электрической энергии одного рода тока ( частоты, числа фаз переменного тока, напряжения постоянного тока ) в энергию другого рода тока. Такие электрические машины называются преобразователями.
В работе будут описаны принципы и характеристики работы двигателей электропривода, согласно заданной темы и выполненных работ по изучению основ электропривода.
В зависимости от рода тока электроустановки, в которой должна работать электрическая машина, они делятся на машины постоянного и переменного тока.
Машины переменного тока могут быть как однофазными, так и много фазными. Наиболее широкое применение нашли трехфазные синхронные и асинхронные машины, а также коллекторные машины переменного тока, которые допускают экономичное регулирование частоты вращения в широких пределах
В настоящее время асинхронные двигатели являются наиболее распространенными электрическими машинами. Они потребляют около 50% электроэнергии, вырабатываемой электростанциями страны. Такое широкое распространение асинхронные электродвигатели получили из-за своей конструктивной простоты, низкой стоимости, высокой эксплуатационной надежности. Они имеют относительно высокий КПД: при мощностях более 1кВт кпд=0,7:0,95 и только в микродвигателях он снижается до 0,2-0,65.
| Следующая >Устроиство и принцип действия асинхронного электродвигателя. |
|---|
Применение электродвигателей в бытовой технике | Полезные статьи
Бытовые электродвигатели сегодня заслуженно считаются практически базовым компонентом бытовых электроприборов. Так как бытовые электромашины и приборы отличаются по своим функциональным и мощностным возможностям, то и конструкции электродвигателей обладают существенными различиями. Бытовые электродвигатели, согласно основной классификации, делятся на электродвигатели для бытовой техники постоянного и переменного тока.
Так, асинхронные электродвигатели переменного тока используются при производстве холодильников, вентиляторов, стиральных машин и проигрывателей. А коллекторные электродвигатели переменного тока, имеющие более сложную структуру, используются при производстве кофемолок, пылесосов, электроплит, миксеров, дрелей, перфораторов и прочих машин, которые должны обладать высокой частотой вращения.
Принцип работы асинхронного электродвигателя
 Современные электродвигатели для бытовой техники обычно обладают сходной структурой: ротором, который связан с механизмом, и статором, на котором находится обмотка возбуждения. Бытовые электродвигатели переменного тока, используемые при производстве бытовой техники, бывают асинхронные и синхронные. Структура асинхронного двигателя предполагает подачу энергии к ротору с помощью электромагнитной индукции. Такие двигатели отличает высокая надежность работы и дешевизна. Что касается основных компонентов этой разновидности двигателей, то основными частями является статор и ротор. Статор представляет собой электрический компонент, собранный из железных пластин, которые образуют группы электромагнитов, расположенных таким образом, что получается цилиндр. Хотя бы один плюс такого магнита располагается по направлению к центру. Магнитные полюса реализованы посредством намотки по часовой и против часовой стрелки медного провода. В результате получаются катушки — северный и южный полюс. А ротор является вращающимся элементом, состоящим из группы электромагнитов, которые находятся вокруг цилиндра с плюсом. Ротор обращен к статору и находится внутри статора. В результате магнитное поле статора движется под влиянием источника питания переменного тока, а индуцированное магнитное поле ротора следует за вращением поля статора.
Современные электродвигатели для бытовой техники обычно обладают сходной структурой: ротором, который связан с механизмом, и статором, на котором находится обмотка возбуждения. Бытовые электродвигатели переменного тока, используемые при производстве бытовой техники, бывают асинхронные и синхронные. Структура асинхронного двигателя предполагает подачу энергии к ротору с помощью электромагнитной индукции. Такие двигатели отличает высокая надежность работы и дешевизна. Что касается основных компонентов этой разновидности двигателей, то основными частями является статор и ротор. Статор представляет собой электрический компонент, собранный из железных пластин, которые образуют группы электромагнитов, расположенных таким образом, что получается цилиндр. Хотя бы один плюс такого магнита располагается по направлению к центру. Магнитные полюса реализованы посредством намотки по часовой и против часовой стрелки медного провода. В результате получаются катушки — северный и южный полюс. А ротор является вращающимся элементом, состоящим из группы электромагнитов, которые находятся вокруг цилиндра с плюсом. Ротор обращен к статору и находится внутри статора. В результате магнитное поле статора движется под влиянием источника питания переменного тока, а индуцированное магнитное поле ротора следует за вращением поля статора.
Электродвигатели серии КД
 Электродвигатели серии КД являются разновидностью асинхронных электродвигателей переменного тока. В их обмотку включены конденсаторы, которые и определяют фазу сдвига тока. Электродвигатели серии КД подключаются в однофазную сеть с помощью специальных микросхем. Данная разновидность бытовых электродвигателей подразделяется на трехфазные и двухфазные, которые определяются по способу схемы подключения.
Электродвигатели серии КД являются разновидностью асинхронных электродвигателей переменного тока. В их обмотку включены конденсаторы, которые и определяют фазу сдвига тока. Электродвигатели серии КД подключаются в однофазную сеть с помощью специальных микросхем. Данная разновидность бытовых электродвигателей подразделяется на трехфазные и двухфазные, которые определяются по способу схемы подключения.
Применяются электродвигатели серии КД при производстве бытовой техники небольших мощностей (магнитофоны, проигрыватели, циркуляционные насосы водных и отопительных систем, воздуходувках, дымососы отопительных систем и пр.).
Специальные регулируемые асинхронные двигатели — Википедия
Специальные регулируемые асинхронные двигатели создаются в результате адаптации общепромышленных асинхронных двигателей к их условиям эксплуатации в управляемых электроприводах, имеющие в итоге более высокие энергетические и массогабаритностоимостные показатели по сравнению с неадаптированными.
Работа асинхронного двигателя в регулируемом электроприводе (ЭП) характеризуется существенными особенностями, которые и определяют предъявляемые к ним специфические технические требования. Эти особенности связаны с изменяющимися в заданных пределах, а часто и по заданным законам, значениями частот вращения двигателя, величин и частот питающего двигатель напряжения или тока, наличием и необходимостью учёта временных высших гармонических составляющих. В силу этого специфическими являются математические модели (ММ) электромагнитных, электромеханических, энергетических, тепловентиляционных процессов в установившихся и переходных режимах работы двигателей, расчетов добавочных магнитных потерь, механических и виброакустических показателей, которые построены на усовершенствованных расчетных методиках.
Использование серийных асинхронных двигателей (АД) в электроприводах с полупроводниковыми преобразователями не оптимально по массогабаритным, энергетическим и другим показателям. По некоторым оценкам использование обычных серийных АД в частотном приводе снижает КПД и требует завышения их установленной мощности на 15-20 % при работе в установившихся режимах и до 40-45 % при работе в динамических режимах. Из-за высших гармоник напряжения и тока на выходе преобразователя частоты на 5-6 % возрастают потери в двигателе.
Необходимо проектирование специальных регулируемых асинхронных двигателей (РАД) с улучшенными регулировочными, динамическими и виброакустическими свойствами. Применение РАД, спроектированных с учётом специфики их работы в условиях регулируемого ЭП, вместо общепромышленных АД дает возможность значительно снизить массу, габариты и стоимость электроприводов, улучшить их функциональные показатели. Если оптимально спроектировать двигатель для частотного регулирования, можно получить на 25 % большую мощность, чем у общепромышленных АД того же габарита, либо уменьшить объем при той же мощности.
Техническими предпосылками, обеспечивающими преимущества адаптированных регулируемых двигателей над серийными машинами, являются:
- Исключение требований к пусковым характеристикам (не ставиться задача обеспечения кратностей пускового и максимального моментов), в связи с чем может быть применена соответствующая форма паза ротора (отказ от глубоких пазов), обеспечивающая минимальное активное сопротивление обмотки ротора и меньшую индуктивность рассеяния;
- требуемую частоту вращения производственного механизма, определяемую частотой питания двигателя, числом полюсов обмотки статора АД и передаточным числом редуктора, можно обеспечить при различных сочетаниях этих трех величин;
- возможность некоторого снижения перегрузочной способности АД, поскольку система привода отслеживает параметры напряжения или тока питания двигателя;
- использование эффективных систем само- и, при необходимости, принудительного охлаждения;
- возможность выбора оптимального соотношения нестандартных значений напряжения и частоты проектируемого двигателя, отличного от базового и согласованного с номинальными значениями преобразователя, что позволяет снизить массу и габариты;
- усиление электроизоляции витков обмотки статора с целью защиты от импульсных перенапряжений;
- использование соответствующих подшипников с учётом, как высоких скоростей вращения, так и появления паразитных токов от высокочастотной коммутации.
Принципы и методология проектирования[править | править код]
Основные принципы и методология проектирования РАД должны базироваться на системном подходе и определяться с учётом существенной специфики их работы в составе ЭП как в установившихся, так и в динамических режимах. Системный подход предусматривает рассмотрение РАД во взаимодействии с другими элементами ЭП: силовой преобразовательной частью, системой управления и регулирования, исполнительным органом рабочей машины. Эффективность системного подхода при проектировании РАД основывается на учёте особенностей отдельных составляющих ЭП, характера отношений и связей между этими составляющими. Благодаря этому значительно повышаются адекватность ММ и соответственно качество проектного синтеза РАД. Использование системного подхода позволяет реализовывать комплексный анализ проектируемого РАД, на основе которого рассматриваются все наиболее важные для проектного синтеза аспекты устройства и функционирования РАД.
Системный подход дает возможность осуществить:
- комплексный учёт всей необходимой совокупности проектных факторов в их взаимосвязи и взаимовлиянии;
- разработку и применение адекватных ММ, учитывающих изменение параметров во всем диапазоне регулирования, и другие особенности работы РАД в регулируемом ЭП;
- обоснование и применение рациональной декомпозиции проектной ММ и модели объекта проектирования, процессов проектного синтеза и оптимизации;
- реализацию эффективных методов оптимизации;
- системную организацию технологии процесса проектного синтеза РАД.
Исходя из системного подхода, определяются специфические проектные критерии и ограничения, используемые при проектировании РАД.
Проектные ММ на основе принципа декомпозиции могут быть составлены с использованием моделей отдельных компонентов ЭП, в том числе и модели объекта проектирования — РАД. Модель РАД должна учитывать полигармонический состав питающего напряжения переменных величины и частоты, изменение параметров двигателя в процессе регулирования и ряд других проектных особенностей. Полупроводниковые преобразователи, отличающиеся типами, силовыми схемами, видами регулирования, законами управления и т. д., представляются разными ММ. Нагрузки ЭП имеют различные законы изменений моментов сопротивлений от частоты вращения и различные уровни. Они могут быть непрерывного или циклического действия. Все это должно найти отражение в ММ нагрузок. Работа АД в системах с ПП обладает существенной спецификой, которая является причиной появления новых требований к параметрам и технико-экономическим показателям РАД, в результате чего задача разработки машин для указанных систем переросла в самостоятельную проблему, включающую и круг вопросов, связанных с определением оптимальных параметров двигателей. Для решения задач проектного синтеза и оптимизации таких двигателей не могут быть применены стандартные методы и программное обеспечение, разработанные для АД общепромышленного назначения.
При проектировании РАД учитываются следующие особенности и требования:
- необходимость использования в системе расчетного проектирования комплексных ММ, включающих в себя модели всех взаимодействующих компонентов ЭП, а не только модели двигателя, как это делается при проектировании общепромышленных АД;
- выполнение проектирования на определенный диапазон частот вращения, что требует проведения большого объема поисковых и поверочных расчетов;
- формирование набора специфичных критериев оптимальности.
При проектировании РАД для приводов с ПП, как и при выборе серийных АД для этих приводов, могут использоваться также такие критерии как масса, габариты, стоимость двигателя или диапазонные критерии — энергетические показатели двигателя и приведенные затраты. Особые диапазонные критерии оптимальности обуславливают специфику их определения. В частности, энергетические показатели — КПД и коэффициент мощности, приведенные затраты должны рассматриваться в виде эквивалентных усредненных значений для всего диапазона регулирования. При необходимости в состав критериев включаются аналогичные критерии приводов в целом. В ряде случаев может применяться обобщенный критерий, представляющий собой скалярную свертку вышеуказанных критериев с различными коэффициентами их значимости. В установившихся режимах специфика работы РАД заключается, прежде всего, в том, что в каждой рабочей точке двигатель питается определенным по качественно-количественному составу полигармоническим напряжением, зависящим от типа, вида регулирования, закона управления преобразователя, и работает в общем случае с определенным нагрузочным моментом. В разных рабочих точках диапазона регулирования значения параметров схем замещения двигателя различны. Они определяются с учётом вытеснения токов в обмотках и насыщения магнитной цепи машины. Эти особенности положены в основу оптимизационно-поисковых расчетов.
Задача адаптации электромашинной части регулируемых ЭП к специфическим условиям работы решается как задача структурно-параметрической оптимизации РАД. Трудоемкость задачи проектирования обусловлена не только необходимостью формирования множества рациональных структур РАД, но и необходимостью решения задачи параметрической оптимизации для каждой сформированной структуры. По своей направленности задачи структурного синтеза можно разделить на внутренние (относящиеся к АД) и внешние (относящиеся к системе привода). Задачей параметрической оптимизации является определение такого набора значений управляемых переменных некоторой сформированной структуры электропривода и входящего в него РАД, при котором целевая функция имеет наилучшее значение. При этом выполняются все требования и ограничения, оговоренные в задании на проектирование. Множество структур РАД с оптимизированными параметрами является информационным базисом для выбора оптимального варианта РАД.
Системный подход предусматривает рассмотрение всех аспектов функционирования РАД. Поэтому при проектном синтезе РАД используется ряд подсистем, с помощью которых осуществляются поверочные расчеты. К их числу относятся расчеты механических и виброакустических показателей, неустановившихся режимов работы. Проектные ММ подсистем так же, как и модели оптимизационно-поисковых расчетов, являются комплексными, составленными из ММ входящих в привод элементов, и в них выполнен учёт рассмотренной выше специфики. При наличии в техническом задании на проектирование РАД активных ограничений, прямо не связанных с электромагнитными, электромеханическими, тепловыми процессами, задача условной оптимизации решается на основе сочетания методов уступок по критериям и релаксации ограничений.
Использование информационных технологий автоматизированного проектного синтеза, прикладного математического и программного обеспечения позволяет реализовать следующие варианты:
- проектирование и производство серий РАД на основе тщательного анализа рынка потребления;
- разработка РАД для использования в регулируемых ЭП конкретных электромеханических систем;
- редизайн АД, использующегося в настоящее время в определенных регулируемых ЭП с целью их адаптации к специфическим условиям работы.