


Принцип работы асинхронного двигателя | Заметки электрика
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
Принцип работы трехфазного асинхронного двигателя
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Частота вращения электродвигателя | Полезные статьи
Частота вращения электродвигателя напрямую влияет на его производительность и уровень энергопотребления. Поэтому регулирование частоты вращения электродвигателя является востребованной в промышленности функцией, которая стала доступной с появлением специальных силовых полупроводниковых приборов — тиристоров, а также транзисторов IGBT.
 Рисунок 1. Один из видов преобразователей частоты вращения электродвигателей На сегодняшний день различные способы управления асинхронными электромоторами широко применяются в промышленности, ведь изменяемая частота вращения электродвигателя позволяет не только экономить энергию, но и существенно усовершенствовать управление различными технологическими процессами.
Рисунок 1. Один из видов преобразователей частоты вращения электродвигателей На сегодняшний день различные способы управления асинхронными электромоторами широко применяются в промышленности, ведь изменяемая частота вращения электродвигателя позволяет не только экономить энергию, но и существенно усовершенствовать управление различными технологическими процессами.
Стоит отметить, что если требуется регулировка скорости, гораздо чаще используются двигатели постоянного тока.
Поэтому использовать преобразователь частоты электродвигателя в данном случае нет необходимости. Управление такого двигателя осуществляется регулированием напряжения, благодаря чему он отличается простотой эксплуатации. При этом двигатели постоянного тока отличаются высокой стоимостью, сложной конструкцией и не всегда подходящими для промышленной эксплуатации характеристиками.
С асинхронными двигателями все наоборот: они надежны, сравнительно недороги и имеют хорошие эксплуатационные характеристики. Но с ними можно использовать только гораздо более дорогостоящие и сложные регуляторы скорости вращения. Впрочем, с появлением биполярных транзисторов с изолированным затвором данная проблема стала гораздо менее острой, поэтому асинхронные двигатели с регулируемой частотой вращения также довольно широко применяются в промышленных масштабах.
Самостоятельное определение частоты вращения электродвигателя
Не зная частоты вращения электродвигателя, во многих случаях нет возможности эксплуатировать его. Если документация к мотору отсутствует, приходится думать, как определить частоту вращения электродвигателя самостоятельно. Сделать это можно, воспользовавшись пошаговой инструкцией:
- Современные асинхронные электродвигатели делятся на три группы, по количеству оборотов в минуту. Первая группа — двигатели с частотой до 1000 об/мин. Вторая группа — до 1500 оборотов. Третья группа — до 3000 оборотов в минуту.
- Чтобы определить частоту вращения электродвигателя, нужно выявить, к какой группе он относится. Для этого необходимо открыть его крышку и найти катушку обмотки.
- Далее нужно примерно определить размеры катушки по отношению к кольцу статора. Точные расчеты и замеры здесь не требуются.
- Если катушка по размеру способна закрыть собой примерно половину кольца статора, частота вращения электродвигателя составляет 3000 об/мин. Если катушка покрывает около трети самого кольца, то электродвигатель относится ко второй группе. Если размер катушки равен четверти кольца — число оборотов не превышает 1000.
Это только примерный подсчет, но даже такие данные уже помогут определить основные характеристики, возможности, а значит, и сферу применения исследуемого электродвигателя.
От чего зависит частота вращения электродвигателя. Регулирование скорости вращения асинхронных электродвигателей
Большинство насосов приводятся в действие с помощью асинхронных электродвигателей, это означает, что двигатели вносят вклад в общую эффективность насосной системы.
Данная статья посвящена исследованию ключевых аспектов эффективности электродвигателя, которые находятся под контролем пользователя. 2/3 всей вырабатываемой электроэнергии, потребляются электродвигателями, которые используются в различном оборудовании на промышленных площадках всего мира.
Электродвигатели развиваются на протяжении последних 150 лет. Не смотря на то, что существует большой выбор из различных конструкций двигателей (например синхронные, асинхронные или постоянного тока), наиболее используемым в промышленности на сегодняшний день является асинхронный электродвигатель переменного тока, т.к. является более надежным. Также асинхронный электродвигатель предпочтительнее при использовании частотного преобразователя. Достаточно высокая эффективность в сочетании с простотой изготовления, высокой надежностью и низкой ценой делает его самым широко-применяемым типом двигателя по всему миру.
Рисунок 1: Асинхронный электродвигатель с короткозамкнутым ротором
На рисунке 1 показана обычная компоновка асинхронного электродвигателя с тремя обмотками статора, которые расположены вокруг сердечника. Обмотка ротора состоит из медных или алюминиевых стержней, торцы которых накоротко замкнуты кольцами. Кольца изолированы от ротора. В подшипниковом узле, как правило, используются шарикоподшипники с консистентной смазкой, за исключением очень больших двигателей. Смазка масляным туманом может значительно увеличить срок службы подшипников. Во всех асинхронных электродвигателях используется трехфазный ток, за исключением самых маленьких промышленных процессов (ниже 2 л.с.). Для запуска фазных двигателей необходимы другие средства, такие как щетки или конденсаторный пуск (использование конденсатора во время пуска).
Проблема эффективности двигателя
При использовании электродвигателя в качестве привода насоса потери энергии и падение давления в результате неэффективности насоса обычно гораздо больше, чем потери энергии связанные с неэффективностью электродвигателя, но они не являются незначительными. Оптимизация эффективности электродвигателя насоса может обеспечить реальную экономию стоимости рабочего цикла на протяжении всего срока службы насоса/электродвигателя. Ключевыми факторами, которые влияют на эффективность асинхронного двигателя являются:
- относительная нагрузка двигателя (негабаритные двигатели находящиеся под нагрузкой)
- скорость вращения (число полюсов)
- размер двигателя (номинальная мощность)
- класс двигателя: обычный КПД в сравнении с энергоэффективностью в с равнении с высоким КПД
Как показано на рисунке 2, эффективность асинхронного электродвигателя изменяется вместе с
относительной нагрузкой на электродвигатель по сравнению с номинальной характеристикой. Вплоть до нагрузки в 50% эффективность большинства электродвигателей остается линейной и для некоторых электродвигателей достигает пика у отметки 75%. Электродвигатели могут работать при нагрузке меньше 50% только в течение короткого промежутка времени и не могут эксплуатироваться при нагрузках меньше 20% от номинальных. Таким образом, когда отрегулированные рабочие колеса или насосы возвращаются к своим кривым «напор-подача», необходимо оценить воздействие относительной нагрузки на электродвигатель.
Рисунок 2: Эффективность электродвигателя для 100-сильных моторов — Обычные кривые характеристик при нормальном диапазоне нагрузок электродвигателя
Скорость вращения
На рисунке 2 также показано влияние скорости вращения на максимально-достижимую эффективность. 4-х полюсный электродвигатель при номинальных 1800 об/мин выходит на самый высокий КДП, а 2-х полюсный при номинальных 3600 об/мин дает низкую эффективность. Таким образом, хотя насосы с номинальной частотой вращения 3600 об/мин могут быть более эффективными (и иметь низкую закупочную стоимость), чем насосы со скоростью вращения 1800 об/мин, электродвигатели последних могут быть более эффективными, плюс эти насосы, как правило, имеют более низкий NPSHR и энергию всасывания, не говоря уже о более длительном сроке службы. Также следует отметить, что номинальная мощность электродвигателя влияет на его эффективность, большие электродвигатели имеют большую эффективность, чем малые.
Скорость вращения асинхронного электродвигател я
Синхронная скорость вращения асинхронного электродвигателя рассчитывается по следующей формуле:
n = 120*f/p
где:
n = скорость вращения в об/мин
f = частота питающей сети (Гц)
p = количество полюсов (min = 2)
Для регулирования частоты вращения электродвигателя без использования внешних механических устройств необходимо регулировать напряжение и частоту подаваемого тока. Некоторые электродвигатели могут быть изготовлены с несколькими обмотками (количество полюсов) для достижения двух или более различных скоростей вращения.
Асинхронные электродвигатели вращаются со скоростью, которая меньше скорости вращения магнитного поля (на 1-3% при полной нагрузке). Разница между фактической и синхронной частотой вращения называется скольжением. Для новых более энергоэффективных электродвигателей скольжение имеет тенденцию уменьшаться в отличие от старых электродвигателей с обычным КПД. Это означает, что при заданной нагрузке энергоэффективные электродвигатели работают немного быстрее.
Рисунок 3. Эффективность при полной и частичной загрузке двигателя с низким и высоким КПД
Электродвигатели с высоким КПД
На рисунке 3 изображен пример возможного повышения эффективности, когда старый электродвигатель с обычной эффективностью заменяется новым, имеющим более высокий КПД. Как упоминалось ранее, электродвигатели с высоким КПД работают с меньшим скольжением, что дает некоторое увеличение скорости вращения, а следовательно напор насоса и производительность становятся несколько больше.
Однако, использование электродвигателей с высоким КПД в некоторых (с изменением подачи) процессах будет не оправданно, из-за большей скорости вращения (и напора насоса), до тех пор пока существующие электродвигатели по-прежнему слабо загружены (работающие с низким КПД). Т.к. входная мощность на валу насоса пропорциональна скорости в кубе, простая замена старого электродвигателя новым с высоким КПД не обязательно приведет к снижению потребления энергии.
С другой стороны, если немного большая подача и напор для насоса — это хорошо, замена старого
электродвигателя с обычным КПД на новый с высоким КПД может быть оправдана.
Коэффициент мощности электродвигателя
Другая проблема, которая входит в игру с характеристиками асинхронного электродвигателя (которая имеет косвенное влияние на энергопотребление) называется «Коэффициент Мощности «. Некоторые
коммунальные предприятия обязывают клиентов платить дополнительные сборы за низкие значения
коэффициентов мощности. Потери в сети происходят за счет того, что при меньшем коэффициенте
мощности требуется большее количество тока, что приводит к серьезным потерям энергии. Как и КПД,
коэффициент мощности электродвигателя также снижается с уменьшением нагрузки на него практически по линейному закону приблизительно до 50% нагрузки.
Определение коэффициента мощности:
Фазовый сдвиг (задержка) синусоидальной волны тока от синусоиды напряжения, который выбарабывает меньшее количе
Обороты электродвигателя | Механические характеристики, типы и модели – на промышленном портале Myfta.Ru
Все электродвигатели имеют основные характеристики:
- Потребляемая мощность
- Максимальный КПД
- Номинальная частота вращения вала
- Номинальный момент
Также они имеют механическую характеристику – зависимость момента от оборотов. Определить количество оборотов электродвигателя можно по катушкам обмотки статора. Для этого в статоре надо найти катушку, которая лучше всего просматривается. Если вычислить расстояние, занимаемое катушкой по кольцу железа статора, можно точно определить, сколько оборотов имеет данная асинхронная модель.
Асинхронные устройства разделяются по количеству оборотов мотора на: 1000 об/мин, 1500 об/мин и 3000 об/мин.
Если расстояние составляет половину кольца железа статора, то это агрегат с 3000 об/мин. Если это составляет 1/3 кольца железа, то он имеет 1500 об/мин. Если же расстояние, занимаемое катушкой, составляет 1/4 кольца железа, то данный прибор имеет 1000 об/мин.
Модели с количеством 1000 об/мин применяют на таком оборудовании, где нет необходимости в высокой скорости вращения вала ротора. Например, на лебедках, кранах, транспортерах и т.д.
Электродвигатели с оборотами 1500 и 3000 об/мин применяют на металлообрабатывающих и деревообрабатывающих станках, компрессорах, холодильниках и т.д.
Мощность их может колебаться в пределах от 0,12 до 200 кВт, что напрямую зависит от размера и назначения оборудования.
Электронные регуляторы в зависимости от типа двигателя, классифицируются:
- Для коллекторных моделей
- Для безколлекторных бездатчиковых
- Для безколлекторных с датчиками Холла.
Также все регуляторы оборотов электродвигателя различаются в зависимости от максимального рабочего тока, напряжения батареи, работы с аккумуляторами различного типа.
Регуляторы, предназначенные для безколлекторных устройств, не только управляют мощностью, но и определяют положение ротора в каждый момент времени для того, чтобы правильно задать фазы трех питающих напряжений, необходимых для работы мотора.Регуляторы для коллекторных моторов могут быть подсоединены к нескольким моторам, параллельно или последовательно с условием, что суммарный ток не превышает максимальный ток, рассчитанный на данный регулятор.
Регуляторы, предназначенные для электрических двигателей водоплавных судов, оснащены дополнительной защитой от влаги и имеют жидкостное охлаждение.
Регуляторы, применяемые в автомобилях, оборудованы радиатором воздушного охлаждения и реверсом направления вращения.
Некоторые модели регуляторов имеют на корпусе кнопки для изменения параметров, другие настаиваются с помощью аппаратуры.
Основные настраиваемые функции регуляторов:
- Гувернер – режим регулирования не мощности, а оборотов. При изменении нагрузок, контроллер добавляет или уменьшает мощность.
- Режим старта – быстрый, плавный, жесткий.
- Для устройства с редукторами или тяжелыми лопастями – режим, замедляющий набор оборотов при его старте.
- Настройка времени набора оборотов от ноля до максимума – т.е. ускорение или задержание.
- Настройка режима газа – зависимость оборотов мотора от ручки газа. Может быть оснащена автокалибровкой.
- Функция тормоз – включение/выключение режима торможения. В некоторых контроллерах есть функция регулировки усилия торможения от 0 до 100%.
- Функция реверс – включение и выключение режима реверса.
- Настройка ограничения тока — устанавливает максимальную силу тока, при превышении которой, агрегат отключается автоматически.
- Функция напряжение выключение мотора – устанавливает минимальное напряжение аккумуляторной батареи. В целях защиты батареи от глубокого разряда, отключает ее от двигателя.
- Функция тип выключения мотора – мягкое или жесткое выключение при срабатывании защиты.
- Настройка частоты импульсов позволяет улучшить линейность регулирования частоты вращения. Применяется в основном для 3-4-витковых низкоиндуктивных моторов.
- Функция опережение – устанавливает угол опережения коммутации обмоток.
Для изменения числа оборотов коллекторного устройства с независимым возбуждением нужно поменять напряжение на обмотках ротора, при этом не меняя напряжение на обмотке статора.
Для регулирования частоты вращения с последовательным возбуждением, питающегося от сети переменного тока, применяют тиристорный регулятор.
Регулирование частоты вращения асинхронного электродвигателя | Полезные статьи
 Рисунок 1. Асинхронный двигатель Асинхронный двигатель (рис. 1) имеет неподвижную часть, которая называется статор, и вращающуюся часть, именуемую ротором. Магнитное поле создается в обмотке, размещенной в статоре. Такая конструкция электродвигателя позволяет регулировать частоту его вращения различными способами.
Рисунок 1. Асинхронный двигатель Асинхронный двигатель (рис. 1) имеет неподвижную часть, которая называется статор, и вращающуюся часть, именуемую ротором. Магнитное поле создается в обмотке, размещенной в статоре. Такая конструкция электродвигателя позволяет регулировать частоту его вращения различными способами.
Основные технические характеристики, учитываемые при изменении частоты вращения
При регулировании частоты вращения асинхронных электродвигателей следует учитывать несколько основных технических показателей, которые в значительной мере влияют на процесс работы двигателей.
- Диапазон регулирования Д, то есть предел, до которого возможно изменять частоту вращения. Эта характеристика вычисляется по соотношению минимальной и максимальной частоты вращения.
- Плавность регулирования — определяется по минимальному скачку частоты вращения электродвигателя, когда осуществляется переход одной механической характеристики на другую.
- Направление изменения частоты вращения двигателя (так называемая зона регулирования). Номинальные условия работы определяют естественную механическую характеристику двигателя. Когда осуществляется процесс регулирования частоты вращения, эти характеристики (напряжение и частота питающей сети) начнут изменяться. В результате получаются искусственные характеристики, которые обычно ниже естественных.
Есть несколько способов регулирования частоты вращения электродвигателя:
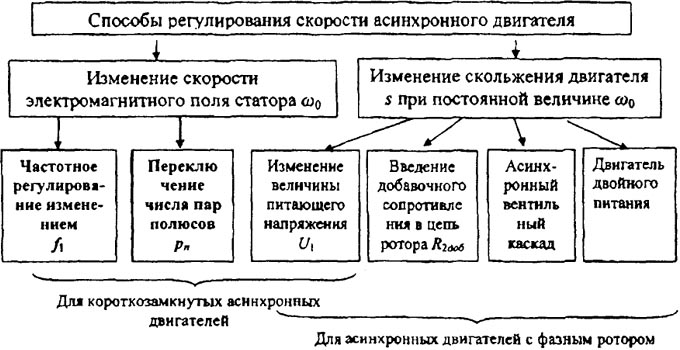
Регулирование частоты вращения изменением частоты питающей сети
Регулирование частоты вращения путем изменения частоты в питающей сети считается одним из самых экономичных способов регулирования, который позволяет добиться отличных механических характеристик электропривода. Когда происходит изменение частоты питающей сети, частота вращения магнитного поля также меняется.
Преобразование стандартной частоты сети, которая составляет 50 Гц, происходит за счет источника питания. Одновременно с изменением частоты происходит и изменение напряжения, которое необходимо для обеспечения высокой жесткости механических характеристик.
Регулирование частоты вращения позволяет добиться различных режимов работы электродвигателя:
- с постоянным вращающим моментом;
- с моментом, который пропорционален квадрату частоты;
- с постоянной мощностью на валу.
В качестве источника питания для регулирования могут использоваться электромашинные вращающиеся преобразователи, а также статические преобразователи частоты, которые работают на полупроводниковых приборах, серийно выпускающихся промышленностью.
Несомненным преимуществом частотного регулирования является наличие возможности плавно регулировать частоту вращения в обе стороны от естественной характеристики. При регулировании достигается высокая жесткость характеристик и отличная перегрузочная способность.
Регулирование частоты вращения изменением числа полюсов
Регулирование частоты вращения путем изменения числа полюсов происходит за счет изменения частоты вращения магнитного поля статора. Частота питающей сети остается неизменной, в то время как происходит изменение частоты вращения магнитного поля и частоты вращения ротора. Они меняются обратно пропорционально числу полюсов. Например, число полюсов равно 2, 4, 6, 8, тогда обороты двигателя при изменении их количества будут составлять 3000, 1500, 1000, 750 оборотов в минуту.
Двигатели, которые обеспечивают переключение числа пар полюсов, имеют обычно короткозамкнутый ротор с обмоткой. Благодаря этому ротору обеспечивается возможность работы двигателя без дополнительных пересоединений в цепи.
Изменение частоты вращения включением в цепь ротора с реостатом
Еще одним способом изменения частоты вращения двигателя является включение в цепь ротора с реостатом. Такой метод имеет существенное ограничение, так как может быть применен только для двигателей с фазным ротором. Он обеспечивает плавное изменение частоты вращения в очень широких пределах. Минусом же являются большие потери энергии в регулировочном реостате.
Изменение направления вращения
Изменение направления вращения двигателя может быть осуществлено за счет изменения направления вращения магнитного поля, которое создается обмотками статора. Изменение направления вращения можно достичь, изменив порядок чередования тока в фазах обмотки статора.
Расчеты преобразователя частоты для асинхронных двигателей
Зачастую приходится понижать скорость вращения двигателя, выполняющего определенные задачи в механизме. Уменьшение числа оборотов элеткродвигателя можно добиться с помощью самодельных приборов, управляющих схем стандартного изготовления.
Электродвигатели переменного тока часто используются в деятельности человека, на металлообрабатывающих станках, транспорта, крановых механизмов и другого оборудования. Двигатели превращают энергию переменного тока питания во вращение вала и агрегатов. Используются в основном асинхронные двигатели переменного тока.
Ротор, а также и статор двигателя состоят из катушек провода, уложенного в сердечник, изготовленный из специальной стали. Классификация электродвигателей следует от способа закладки обмотки.
Обмотка из латунных и медных стержней вставляется в сердечник, по краям устанавливаются кольца. Такая катушка провода называется короткозамкнутым (КР) ротором. Электродвигатели небольшой мощности имеют стержни, а также диски, которые были отлиты вместе. Для электродвигателей с мощным моментом детали отливаются отдельно, затем свариваются. Обмотка статора может быть подключена двумя методами: треугольником, звездой.
Фазный ротор состоит из 3-фазной роторной обмотки, подключенной контактными кольцами и щетками к питанию. Обмотка соединена «звездой».
Расчет количества оборотов асинхронного двигателя
Распространенным двигателем на станках и подъемных устройствах является двигатель с короткозамкнутым ротором, поэтому пример для расчета следует брать для него. Сетевое напряжение поступает на статорную обмотку. Обмотки смещены друг от друга на 120 градусов. Возникшее поле электромагнитной индукции возбуждает электрический ток в обмотке. Ротор начинает работать под действием ЭМС.
Основной характеристикой работы двигателя является число оборотов в минуту. Рассчитываем это значение:
n = 60 f / p, обор / мин;
где f – частота сети, герц, р – количество полюсов статора (в парах).
На корпусе электродвигателя имеется табличка с техническими данными. Если ее нет, то можно самому рассчитать число оборотов вала оборудования по другим имеющимся данным. Расчет производится тремя способами.
- Расчет числа катушек, которое сравнивается с нормами для разного напряжения, следует по таблице:
- Расчет скорости работы по шагу диаметра обмотки по формуле:
2 p = Z1 / y, где 2р – количество полюсов, Z1 – число пазов в статоре, у – шаг обмотки.
Выбираем из таблицы подходящие обороты двигателя:
- Высчитываем количество полюсов по параметрам сердечника по формуле:
2p = 0,35 Z1 b / h или 2 p = 0,5 Di / h,
где 2р – количество полюсов, Z1 – число пазов, b – размер зуба, см, h – высота спинки, см, Di – диаметр по зубцам, см.
По результатам расчета и индукции следует число витков обмотки, сравнивается со значениями мотора по паспорту.
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
Регулировка частоты и напряжения с помощью частотного преобразователя, путем создания дополнительной катушки с переключением полюсов пар, являются самыми востребованными способами.
Распространенные схемы регуляторов
Существует множество частотных преобразователей для асинхронных двигателей, а также различных регуляторов для них. Самостоятельно возможно изготовить прибор для регулировки частоты, применяя транзисторы или тиристоры. Прибор работает как в быту, так и для станочного оборудования, крановых механизмов, различных регулируемых приводов агрегатов.
Мощный регулятор частоты и напряжения показан на схеме. Прибор плавно изменяет параметры привода, экономит энергию, снижает расходы на обслуживание.
Для применения этой схемы в быту, она сложная. Если использовать симистор рабочим элементом, то схема упрощается, и выглядит иначе.
Регулировка будет происходить работой потенциометра, определяюцим фазу импульса входа, и открывающего симистор.
Эффект эксплуатации станков, обрабатывающих металл, подъемных устройств также следует из вращения двигателя, как и сами его эксплуатационные параметры. В продаже имеется множество приборов для регулировки частоты, однако можно вполне собрать такой прибор собственными силами.
Как выбрать частотный преобразователь?
Если проанализировать цены и функции преобразователей частоты, то можно понять, что по цене определяется количество встроенных функции частотного преобразователя. Дорогие модели обладают большой функциональностью. Но для выбора прибора лучше руководствоваться требуемыми условиями применения.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Как подключить частотный преобразователь
Если кабель для подключения на 220 В с 1-й фазой, применяется схема «треугольника». Нельзя подключать частотник, если выходной ток выше 50% от номинального значения.
Если кабель питания на три фазы 380 В, то делается схема «звезды». Чтобы проще было подключать питание, предусмотрены контакты и клеммы с буквенными обозначениями.
- Контакты R, S, T предназначены для подключения сети питания по фазам.
- Клеммы U , V , W служат соединением электродвигателя. Для реверса достаточно изменить подключение двух проводов между собой.
В приборе должна быть колодка с клеммой подключения к земле. Подробней, как подключить, здесь.
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний по обслуживанию:
- Очищать от пыли внутренние элементы. Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
- Периодически контролировать состояние узлов, производить замену. Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
- Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов. Пыль и влажность отрицательно влияют на состояние рабочих элементов прибора.
Окупаемость преобразователя частоты
Электроэнергия постоянно дорожает, руководители организаций вынуждены экономить разными путями. В условиях промышленного производства большая часть энергии расходуется механизмами, имеющими электродвигатели.
Изготовители устройств для электротехнических машин и агрегатов предлагают специальные устройства и приборы для управления электромоторами. Такие устройства экономят энергию электрического тока. Они называются инверторами или частотными преобразователями.
Финансовые затраты на покупку частотника не всегда оправдывают экономию средств, так как стоимость их сопоставима со стоимостью сэкономленной энергии. Не всегда привод механизма можно быстро оснастить инвертором. Какие сложности при этом возникают? Разберем способы запуска асинхронных двигателей для пониманию достоинств инверторов.
Методы запуска двигателей
Можно определить 4 метода пуска двигателей.
- Прямое включение, для моторов до 10 кВт. Способ неэффективен для ускорения, увеличения момента, перегрузок. Токи выше номинала в 7 раз.
- Включение с возможностью выбора схем «треугольника» и «звезды».
- Интегрирование устройства плавного пуска.
- Применение инвертора. Способ особенно эффективен для защиты мотора, ускорения, момента, экономии энергии.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:
где Э – экономия денег в рублях;
Рпч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Модуль №4. Частотное регулирование скорости асинхронного двигателя
Watch this video on YouTube
Как узнать обороты эл двигателя. Как определить обороты электродвигателя
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными. Однако, как известно многим электромеханикам, шильдики на них могут быть абсолютно нечитабельными, да и в самом двигателе статор мог быть перемотан. Определить номинальную частоту вращения электродвигателя можно по количеству полюсов в обмотке, но если речь идет о машинах с фазным ротором или разбирать корпус нет желания, можно прибегнуть к одному из проверенных методов.
Определение скорости при помощи графического рисунка
Для определения скорости вращения двигателя существует таблица графических рисунков круглой формы. Суть в том, что приклеенный на торец вала бумажный кружок с заданным узором при вращении образует определенный графический эффект при освещении источником света с частотой в 50Гц. Таким образом, перебрав несколько рисунков и сравнив результат с табличными данными можно определить номинальную скорость вращения двигателя.Типовые характеристики по монтажным размерам
Промышленные двигатели производства СССР, как и большинство современных, производились по государственным стандартам и имеют установленную таблицу соответствия. Исходя из этого, можно замерить высоту центра вала относительно плоскости посадки, его передний и задний диаметры, а также размеры крепежных отверстий. В большинстве случаев этих данных будет достаточно, чтобы найти в таблице нужный двигатель и не только определить частоту вращения, но и установить его электрическую и полезную мощность.При помощи механического тахометра
Очень часто нужно определить не только номинальную характеристику электрической машины, но и знать точное количество оборотов в данный момент. Это делается при диагностике электрических двигателей и для определения точного показателя коэффициента скольжения .В электромеханических лабораториях и на производстве используются специальные приборы — тахометры. Если получить доступ к такому оборудованию, измерить частоту вращения асинхронного двигателя можно за несколько секунд. Тахометр имеет стрелочный или цифровой циферблат и измерительную штангу, на конце которой имеется отверстие с шариком. Если смазать центровочное отверстие на валу вязким воском и плотно приставить измерительную штангу к нему, на циферблате отобразится точное количество оборотов в минуту.
При помощи детектора стробоскопического эффекта
Если двигатель находится в процессе эксплуатации, можно избежать необходимости отстыковывать его от исполнительного механизма и снимать задний кожух только для того, чтобы добраться до центровочного отверстия. Точное количество оборотов в этих случаях можно также измерить при помощи стробоскопического детектора. Для этого на вал двигателя наносят продольную риску белого цвета и устанавливают светоулавливатель прибора напротив нее.При включении двигателя в работу прибор определит точное количество оборотов в минуту по частоте появления белого пятна. Этот метод применяется, как правило, при диагностическом обследовании мощных электрических машин и зависимости частоты вращения от приложенной нагрузки.
Использование кулера от персонального компьютера
Для проведения измерений частоты вращения двигателя можно использовать весьма оригинальный метод. В нем применяется лопастной вентилятор охлаждения от персонального компьютера. Пропеллер крепится к торцу вала при помощи двустороннего скотча, а рама вентилятора удерживается вручную. Провод вентилятора подключается к любому из разъемов материнской платы, на котором можно провести измерения, при этом само питание на кулер подавать не нужно. Точный показатель частоты вращения можно получить через утилиту BIOS или диагностическую утилиту, работающую под управлением операционной системы.Иногда, купив электродвигатель для автомобиля с рук, можно обнаружить, что в коробке из-под него нет абсолютно никакой документации. Тогда придется определять количество допустимых для него оборотов самостоятельно.
Спонсор размещения P&G Статьи по теме «Как определить обороты электродвигателя» Как регулировать скорость вращения Как прогреть машину быстро Как подключить однофазный электродвигатель
Инструкция
Все асинхронные электродвигатели можно разделить на три группы по количеству обращения ротора в минуту. Первая — 1000 оборотов. На самом деле эта цифра немного преувеличена, поскольку двигатель является асинхронным. В минуту его ротор совершает чуть меньшее количество оборотов (950-980), а для удобства значение было решено округлить. В двигателях второй группы количество обращений ротора составляет 1500 в минуту (на деле 1420-1480). В третьей группе ротор оборачивается вокруг себя 3000 раз в минуту (в реальности 2900-2980). Чтобы определить, к какой группе относится ваш электродвигатель, нужно сначала открыть одну его крышку. Найдите катушку обмотки, которая может состоять как из одной детали, так и из трех- четырех. Таких катушек в двигателе должно быть несколько, вам понадобится одна из них, которую легче всего рассмотреть. Катушки связаны между собой необходимыми деталями, которые могут помешать рассмотреть их, и которые ни в коем случае нельзя отсоединять друг от друга. Приглядитесь к выбранной и попробуйте определить ее размер относительно кольца статора. Это расстояние не обязательно определять с точностью до миллиметра, вполне подойдут приблизительные расчеты. В том случае, если размер катушки покрывает собой одну вторую кольца статора, то скорость обращения ротора будет равна 3000 оборотов в минуту. Если она закрывает собой треть кольца, то это двигатель второй группы, ротор которого будет вращаться со скоростью 1500 оборотов в минуту. Если ее размер равен одной четвертой по отношению к кольцу, то вращение будет происходить со скоростью 1000 оборотов в минуту. Нужно помнить, что подобные цифры лишь приблизительно отражают реальную картину вращения. Как просто
Другие новости по теме:
В любительской и ремонтной практике возникает необходимость использования трехфазных электродвигателей для силового привода. Для их питания вовсе не обязательно иметь трехфазную сеть. Самый эффективный способ запуска асинхронного электродвигателя — подключить его третью обмотку через фазосдвигающий
Мощность электродвигателя, как правило, указывается в технической документации к нему или в специальной табличке на корпусе. Если так ее найти невозможно, рассчитайте ее самостоятельно. Это можно сделать, измерив ток в обмотках и напряжение на источнике. Также можно определить его мощность по
Устойчивая работа двигателя на холостом ходу очень важна. При этом обороты не должны быть высокими и «плавать». От этого зависит расход топлива, нагрузка на детали автомобиля и многое другое. Поэтому каждый автомобилист должен знать, как отрегулировать обороты холостого хода своего «железного
Мощность автомобиля — один из базовых показателей, на которые обращают внимание при покупке. А со временем некоторые автолюбители просто спят и видят, как бы увеличить мощность машины. А сделать это можно, повысив обороты. Спонсор размещения P&G Статьи по теме «Как повысить обороты двигателя» Как
Если вы решили самостоятельно сделать электродвигатель, вам понадобится точный расчет характеристик его работы. Ведь от этого будет зависеть, сможет ли он выполнять свои функции или нет. Спонсор размещения P&G Статьи по теме «Как рассчитать электродвигатель» Как сделать индукционный нагреватель Как
Электрические двигатели допускают регулировку числа оборотов в значительных пределах. Способ регулировки этого параметра зависит от типа электродвигателя. Некоторые двигатели допускают регулировку различными способами и их сочетаниями. Спонсор размещения P&G Статьи по теме «Как снизить обороты
В последние годы наблюдается тенденция распространения скутеров среди подростков. Если раньше они были в диковинку, то сейчас есть, наверно, у каждого школьника. У скутера много достоинств и почти нет недостатков. Во-первых, он достаточно легок в управлении. Во-вторых, он не такой большой как
Обычно на электрическом двигателе прикреплена бирка, на которой выбиты паспортные данные, схема соединения обмоток, напряжен