


Векторное управление
Дмитрий Левкин
Главная идея векторного управления заключается в том, чтобы контролировать не только величину и частоту напряжения питания, но и фазу. Другими словами контролируется величина и угол пространственного вектора [1]. Векторное управление в сравнении со скалярным обладает более высокой производительностью. Векторное управление избавляет практически от всех недостатков скалярного управления.
- Преимущества векторного управления:
- высокая точность регулирования скорости;
- плавный старт и плавное вращение двигателя во всем диапазоне частот;
- быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости;
- увеличенный диапазон управления и точность регулирования;
- снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя.
- К недостаткам векторного управления можно отнести:
- необходимость задания параметров электродвигателя;
- большие колебания скорости при постоянной нагрузке;
- большая вычислительная сложность.

Общая функциональная схема векторного управления
Общая блок-диаграмма высокопроизводительной системы управления скорости бесщеточного двигателя переменного тока показана на рисунке выше. Основой схемы являются контуры контроля магнитного потокосцепления и момента вместе с блоком оценки, который может быть реализован различными способами. При этом внешний контур управления скоростью в значительной степени унифицирован и генерирует управляющие сигналы для регуляторов момента М
Классификация методов векторного управления
Начиная с семидесятых годов двадцатого века было предложено множество способов управления моментом. Не все из них нашли широкое применение в промышленности. Поэтому, в данной статье рассматриваются только самые популярные методы управления. Обсуждаемые методы контроля момента представлены для систем управления асинхронными двигателями и синхронными двигателями с постоянными магнитами с синусоидальной обратной ЭДС.
Существующие методы управления моментом могут быть классифицированы различным способом.
- Чаще всего методы управления моментом разделяют на следующие группы:
- линейные (ПИ, ПИД) регуляторы;
- нелинейные (гистерезисные) регуляторы.
| Метод управления | Диапазон регулирования скорости | Погрешность скорости3, % | Время нарастания момента, мс | Пусковой момент | Цена | Описание | ||
|---|---|---|---|---|---|---|---|---|
| Скалярный | 1:101 | 5-10 | Не доступно | Низкий | Очень низкая | Имеет медленный отклик при изменении нагрузки и небольшой диапазон регулирования скорости, но при этом прост в реализации. | ||
| Векторный | Линейный | Полеориентированное управление | >1:2002 | 0 | Высокий | Высокая | Позволяет плавно и быстро управлять основными параметрами двигателя — моментом и скоростью. Для работы данного метода требуется информация о положении ротора. | |
| Прямое управление моментом с ПВМ | >1:2002 | 0 | Высокий | Высокая | Гибридный метод, разработанный для того чтобы объединить преимущества ПОУ и ПУМ. | |||
| Нелинейный | Прямое управление моментом с таблицей включения | >1:2002 | 0 | Высокий | Высокая | Имеет высокую динамику и простую схему, но характерной особенностью его работы являются высокие пульсации тока и момента. | ||
| Прямое самоуправление | >1:2002 | 0 | Высокий | Высокая | Имеет частоту переключения инвертора ниже чем у других методов и предназначен для уменьшения потерь при управлении электродвигателями большой мощности. | |||
Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Среди векторного управления наиболее широко используются полеориентированное управление (FOC — field oriented control) и прямое управление моментом (DTC — direct torque control).
Линейные регуляторы момента работают вместе с широтно-импульсной модуляцией (ШИМ) напряжения. Регуляторы определяют требуемый вектор напряжения статора усредненный за период дискретизации. Вектор напряжения окончательно синтезируется методом ШИМ, в большинстве случаев используется пространственно векторная модуляция (ПВМ). В отличие от нелинейных схем управления моментом, где сигналы обрабатываются по мгновенным значениям, в линейных схемах контроля момента, линейный регулятор (ПИ) работает с значениями усредненными за период дискретизации. Поэтому частота выборки может быть уменьшена с 40 кГц у нелинейных регуляторов момента до 2-5 кГц в схемах линейных регуляторов момента.
Полеориентированное управление
Полеориентированное управление (ПОУ, англ. field oriented control, FOC) — метод регулирования, который управляет бесщеточным электродвигателем переменного тока (СДПМ, АДКР), как машиной постоянного тока с независимым возбуждением, подразумевая, что поле и момент могут контролироваться отдельно.Полеориентированное управление, предложенное в 1970 году Блашке [3] и Хассе [4] основано на аналогии с механически коммутируемым коллекторным двигателем постоянного тока с независимым возбуждением. В этом двигателе разделены обмотки возбуждения и якоря, потокосцепление контролируется током возбуждения индуктора, а момент независимо управляется регулировкой тока якоря. Таким образом, токи потокосцепления и момента электрически и магнитно разделены.

Общая функциональная схема бездатчикового полеориентированного управления1
С другой стороны бесщеточные электродвигатели переменного тока (АДКР, СДПМ) чаще всего имеют трехфазную обмотку статора, и вектор тока статора I
В полеориентированном управлении момент и поле контролируются косвенно посредством управления составляющими вектора тока статора.
Мгновенные значения токов статора преобразовываются к dq вращающейся системе координат с помощью преобразования Парка αβ/dq, для выполнения которого также требуется информации о положении ротора. Поле контролируется через продольную составляющую тока Isd, в то время как момент контролируется через поперечную составляющую тока Isq. Обратное преобразование Парка (dq/αβ), математический модуль преобразования координат, позволяет вычислить опорные составляющие вектора напряжения V

Формы сигналов на разных этапах преобразования
Для определения положения ротора используется либо датчик положения ротора установленный в электродвигателе либо реализованный в системе управления бездатчиковый алгоритм управления, который вычисляет информацию о положении ротора в режиме реального времени на основании тех данных, которые имеются в системе управления.
Прямое управление моментом с пространственно векторной модуляцией напряжения
Блок-схема прямого управления моментом с пространственно векторной модуляцией с регулировкой момента и потокосцепления с обратной связью работающей в прямоугольной системе координат ориентированной по полю статора представлена на рисунке ниже. Выходы ПИ регуляторов момента и потокосцепления интерпретируются как опорные составляющие напряжения статора Vψ* и VM* в системе координат dq ориентированной по полю статора (англ. stator flux-oriented control, S-FOC). Эти команды (постоянные напряжения) затем преобразуются в неподвижную систему координат αβ, после чего управляющие значения Vsα* и Vsβ* поступают на модуль пространственно векторной модуляции.

Функциональная схема прямого управления моментом с пространственно векторной модуляцией напряжения
Обратите внимание, что данная схема может рассматриваться как упрощенное управление ориентированное по полю статора (S-FOC) без контура управления током или как классическая схема прямого управления моментом с таблицей включения (ПУМ-ТВ, англ. switching table DTC, ST DTC) в которой таблица включения заменена модулятором (ПВМ), а гистерезисный регулятор момента и потока заменены линейными ПИ регуляторами.
В схеме прямого управления моментом с пространственно векторной модуляцией (ПУМ-ПВМ) момент и потокосцепление напрямую управляются в замкнутом контуре, поэтому необходима точная оценка потока и момента двигателя. В отличии от классического алгоритма гистерезисного прямого управления моментом, ПУМ-ПВМ работает на постоянной частоте переключения. Это значительно повышает характеристики системы управления: уменьшает пульсации момента и потока, позволяет уверенно запускать двигатель и работать на низких оборотах. Но при этом снижаются динамические характеристики привода.
Представленная группа регуляторов момента отходит от идеи преобразования координат и управления по аналогии с коллекторным двигателем постоянного тока, являющегося основой для полеориентированного управления. Нелинейные регуляторы предлагают заменить раздельное управление на непрерывное (гистерезисное) управление, которое соответствует идеологии работы (включено-выключено) полупроводниковых устройств инвертора.
В сравнении с полеориентированным управлением схемы прямого управления моментом имеют следующие характеристики:
- Преимущества:
- простая схема управления;
- отсутствуют контуры тока и прямое регулирование тока;
- не требуется преобразование координат;
- отсутствует отдельная модуляция напряжения;
- датчик положения не требуется;
- хорошая динамика.
- Недостатки:
- требуется точная оценка вектора магнитного потокосцепления статора и момента;
- сильные пульсации момента и тока из-за нелинейного (гистерезисного) регулятора и переменной частоты переключения ключей;
- шум с широким спектром из-за переменной частоты переключения.
Прямое управление моментом
Впервые метод прямого управления моментом с таблицей включения был описан Такахаси и Ногучи в статье IEEJ представленной в сентябре 1984 года и позже в статье IEEE опубликованной в сентябре 1986 года [5]. Схема классического метода прямого управления моментом (ПУМ) на много проще, чем у метода управления по полю (ПОУ), так как не требуется преобразования систем координат и измерения положения ротора. Схема метода прямого управления моментом (рисунок ниже) содержит оценщик момента и потокосцепления статора, гистерезисные компараторы момента и потокосцепления, таблицу включения и инвертор.
Принцип метода прямого управления моментом заключается в выборе вектора напряжения для одновременного управления и моментом и потокосцеплением статора. Измеренные токи статора и напряжение инвертора используются для оценки потокосцепления и момента. Оцененные значения потокосцепления статора  и момента
и момента  сравниваются с управляющими сигналами потокосцепления статора ψs* и момента двигателя M* соответственно посредством гистерезисного компаратора. Требуемый вектор напряжения управления электродвигателем выбирается из таблицы включения исходя из оцифрованных ошибок потокосцепления dΨ и момента dM генерируемых гистерезисными компараторами, а также исходя из сектора положения вектора потокосцепления статора
сравниваются с управляющими сигналами потокосцепления статора ψs* и момента двигателя M* соответственно посредством гистерезисного компаратора. Требуемый вектор напряжения управления электродвигателем выбирается из таблицы включения исходя из оцифрованных ошибок потокосцепления dΨ и момента dM генерируемых гистерезисными компараторами, а также исходя из сектора положения вектора потокосцепления статора  полученного исходя из его углового положения
полученного исходя из его углового положения  . Таким образом, импульсы SA, SB и SC для управления силовыми ключами инвертора генерируются посредством выбора вектора из таблицы.
. Таким образом, импульсы SA, SB и SC для управления силовыми ключами инвертора генерируются посредством выбора вектора из таблицы.

Классическая схема прямого управления моментом с таблицей включения с датчиком скорости
- Характерные черты схемы ПУМ-ТВ:
- синусоидальные формы потокосцепления и токов статора с коэффициентом гармоник определяемым зоной гистерезиса (зоной нечувствительности) регуляторов потокосцепления и момента;
- отличная динамика момента;
- зоны гистерезиса потокосцепления и момента определяют частоту переключения инвертора, которая изменяется с изменением синхронной скорости и изменением нагрузки [2].
Имеется множество вариаций классической схемы ПУМ-ТВ нацеленых на улучшение пуска, условий перегрузки, работы на очень низких скоростях, уменьшение пульсаций момента, работу на переменной частоте переключения и уменьшение уровня шумов.
Недостатком классического метода прямого управления моментом является наличие высоких пульсаций тока и момента в установившемся состоянии. Проблема устраняется повышением рабочей частоты инвертора выше 40кГц, что увеличивает общую стоимость системы управления [1].
Прямое сомоуправление
Заявка на патент метода прямого самоуправления была подана Депенброком в октябре 1984 года [6]. Блок схема прямого самоуправления показана ниже.
Основываясь на командах потокосцепления статора ψs* и текущих фазовых составляющих ψsA, ψsB и ψsC компараторы потокосцепления генерируют цифровые сигналы dA, dB и dC, которые соответствуют активным состояниям напряжений (V1 – V6). Гистерезисный регулятор момента имеет на выходе сигнал dM, который определяет нулевые состояния. Таким образом, регулятор потокосцепления статора задает отрезок времени активных состояний напряжений, которые перемещают вектор потокосцепления статора по заданной траектории, а регулятор момента определяет отрезок времени нулевых состояний напряжений, которые поддерживают момент электродвигателя в определенном гистерезисом поле допуска.

Схема прямого самоуправления
- Характерными особенностями схемы прямого самоуправления являются:
- несинусоидальные формы потокосцепления и тока статора;
- вектор потокосцепления статора перемещается по шестиугольной траектории;
- нет запаса по напряжению питания, возможности инвертора используются полностью;
- частота переключения инвертора ниже чем у прямого управления моментом с таблицей включения;
- отличная динамика в диапазонах постоянного и ослабленного поля.
Заметьте, что работа метода прямого самоуправления может быть воспроизведена с помощью схемы ПУМ-ТВ при ширине гистерезиса потока 14%.
- Cristian Busca. Open loop low speed control for PMSM in high dynamic application.- Aalborg, Denmark.: Aalborg universitet, 2010
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon. High-Performance Motor Drives: IEEE Industrial Electronics, vol. 5, no. 3, pp. 6-26, Sep.2011
- F. Blaschke. The principle of field-orientation as applied to the transvector closed loop control system for rotating-field machines: Siemens Rev., vol. 34, no. 1, pp. 217–220, 1972.
- K. Hasse. Drehzahlgelverfahren fur schnelle Umkehrantriebe mit strom-richtergespeisten Asynchron-Kurzchlusslaufermotoren: Reglungstechnik, vol. 20, no. 2, pp. 60–66, 1972.
- I. Takahashi, and T. Noguchi. A new quick response and high-efficiency control strategy of an induction motor: IEEE Trans. Ind. Applicat., vol. IA-22, no. 5, pp. 820–827, Sept./Oct. 1986.
- M. Depenbrock. Direct self control of the flux and rotary moment of a rotary-field machine: US4678248, 1987.
Библиографический список
Управление электродвигателем: приводы переменного тока стали удобнее для пользователя
Для определения тенденций в этом секторе производства Control Engineering и Reed Research Group, входящие в Reed Research Information (www.reedbusiness.com), провели опрос подписчиков по электронной почте для выяснения их мнения и предпочтений в отношении приводов ASD. Выборочные результаты, представленные здесь, основаны на 146 полных ответах, полученных в июле 2005 г. от специалистов, занимающихся оценкой, определением технических требований, рекомендациями, установкой и/или закупкой приводов. Среди таких респондентов 56% делают это для решения внутренних производственных задач, 21% — для ОЕМ (перепродажи), а 21% выполняет обе функции.
Прежние лидеры и новые фавориты
Насосы, вентиляторы и воздуходувы остаются самыми популярными применениями ASD. Об этом сообщили 27% респондентов (по сравнению с 50% в 2003 г.), что говорит о большем разбросе мнений в опросе, проведенном в 2005 г. К наиболее популярным также относятся такие области применения, как производство пищевых продуктов/напитков (12%), а также сборочные и конвейерные линии (10%). Оборудование для транспортировки материалов и деталей, которое в 2003 г. занимало третье место, реже всего упоминалась в 2005 г.
Управление без обратной связи (В/Гц) сохраняет явный приоритет для 79% респондентов (по сравнению с 84% в 2003 г.), векторное управление без энкодера удерживает второе место при 41% (40% в 2003 г.), а векторное управление с обратной связью предпочитают 38% (37% в 2003 г.).
Тем не менее, по сравнению с последним опросом, значительные изменения произошли в характеристиках, которые пользователи считают самыми важными при выборе приводов. Частично это объясняется изменениями в составе респондентов (географическое распределение), большим разнообразием мощности приводов и новыми инвестициями, которые были сделаны за прошедший период. Из числа функциональных характеристик приводов, оцененных как «очень важные», первые четыре места были отданы таким характеристикам, как класс защиты (NEMA 12) — 38% опрошенных, программирование скоростей (34%), защита NEMA 4 (33%) и отметка CE/другая сертификация (30%). В обзоре 2003 г. эти характеристики занимали более скромное место, а самыми полезными считались такие показатели, как простота устройств управления/ установки, удобный интерфейс оператора и цена.
Что же касается рабочих характеристик, то самой важной оказалась возможность работы при высоком напряжении (2,3 кВ и выше), так считает 54% опрошенных. Затем идет управление несколькими двигателями от одного привода (43%), способность управлять как синхронными, так и асинхронными двигателями (37%) и четырехквадрант-ный режим работы (33%). Эти характеристики также получили низкую оценку в предыдущем опросе.
У 83% респондентов приводы с регулируемой частотой работают автономно, но 42% сообщают, что их ASD объединены в сеть. (Здесь могли быть отмечены оба варианта, если они применялись). Среди тех, кто в настоящее время пользуется приводами, включенными в сеть, 79% работают с 4-20 мА. Между тем по результатам можно предположить, что Ethernet TCP/IP (сейчас 67%) в скором времени станет самой широко распространенной сетью. DeviceNet вышла на третье место с 61%. Более широкое использование в следующие 12 месяцев также предсказывается для Ethernet Powerlink, которой в настоящее время отдают предпочтение 19% респондентов.
Покупки ASD также на подъеме. Пятьдесят шесть процентов сообщают, что их покупки приводов ПТ увеличатся в 2006 г. — по сравнению с 42 % в 2003 г.(24% в 2002 г.) — и только 3% (6% в 2003 г.) предвидят снижение покупок. Результаты опроса показывают, что за прошедшие 12 месяцев каждый из респондентов купил 25 ASD, затратив в среднем 46500 долларов.
Изменение приоритетов
Чарльз Мэннинг, руководитель отдела маркетинга продукции в Omron Electronics LLC, предполагает, что изменения в предпочтениях пользователей относительно характеристик приводов — защита, программирование скоростей и сертификация — могут говорить о заинтересованности OEM и интеграторов. По его мнению, еще более важно, что CE-сертификация, по-видимому, говорит о том, что национальные компании экспортируют свою продукцию за границу. В предыдущих опросах отмечался низкий уровень комфорта при эксплуатации приводов, поэтому ответы респондентов, возможно, отражают возросший уровень доверия, поскольку приводы стали более простыми в применении.
Мэннинг также отмечает, что, несмотря на высокий уровень предлагаемой технологии, покупатели стали воспринимать приводы ПТ как товары повседневного спроса. Это значительно усложняет задачу производителей, так как им приходится создавать такие изделия, которые должны отличаться от изделий конкурентов. «Я ожидаю, что вскоре появятся приводы, которые будут подключаться к промышленным сетям по принципу «plug and play» и которые смогут обращаться к заводскому специалисту при возникновении проблем”,- поясняет он.
Изменение потребностей рынка ASD также отмечают в Schneider Electric. В то время как OEM-производители выигрывают от современных, простых в использовании изделий, приносящих неплохую прибыль, потребители выбирают приводы с другими характеристиками, которые позволяют максимально использовать их потенциал и расширить географию рынка, как считает Иван Спронк, менеджер сегмента приводов ПТ. По его мнению, отметка о сертификации изделий становится все более важной по мере того, как промышленность все больше превращается в глобальный рынок, а OEM-производители ищут новые рынки за пределами США. Например, отметка CE становится решающим фактором для продажи оборудования в Европе, а другие отметки (NOM и CCC) выполняют аналогичную роль для таких развивающихся рынков, как Мексика и Китай.
По мере того, как приводы ПТ все чаще используются в запыленной среде и в применениях, связанных с наличием брызг, класс защиты (NEMA 12 и 4) (IP65 и IP66 соответственно — прим. ред.) приобретает особую важность. «Приводы ПТ могут найти применение в таких производственных процессах, в которых прежде они не использовались, — отмечает Спронк. — Кроме того, среди OEM-производителей отмечается постоянная тенденция устанавливать все средства управления, связанные с определенной частью оборудования, непосредственно на механизме, а не рядом или в отдельном помещении», — продолжает он.
Обзор требований, предъявляемых к приводам переменного тока, и их возможностей
Как отмечают в московском представительстве Schneider Electric, стремительно растущий интерес к рынку приводной техники вызван прежде всего тем, что частотный преобразователь является мощным средством энергосбережения. Рост цен на электроэнергию и снижение цен на сами преобразователи снижают сроки окупаемости и делают инвестиции в данное оборудование еще более привлекательными.
Парк приводной техники, предлагаемой на мировом рынке, за последние два года существенно обновился. Практически все фирмы-производители обновили свои модельные ряды. Так, компания Schneider Electric завершит 100% обновление своего предложения к середине 2006 года. Благодаря разработке новых полупроводниковых компонентов, качественные и функциональные характеристики преобразователей шагнули далеко вперед. Теперь уже никого не удивишь функцией автонастройки, встроенным осциллографом и регистратором событий. Новое поколение Altivar 71 общается с компьютером по интерфейсу Bluetooth и может иметь встроенный WEB-сервер. Благодаря встроенной карте контроллер Altivar 71 может стать «мастером» в промышленной сети и сам управлять контроллерами нижнего уровня. Если в прошлом году меню преобразователя с 1000 параметров было пределом функциональных возможностей, то для нового поколения и 3000 параметров — не предел.
Качественные характеристики преобразователей также существенно улучшились, отмечает менеджер сегмента приводной техники ЗАО «Шнейдер Электрик» Александр Мосин. Наметилась тенденция применения преобразователей общего назначения в высокоточных станочных приводах и системах позиционирования. Стало возможным управление синхронными двигателями в разомкнутой и замкнутой системе. Так, уже упоминавшийся Altivar 71 может сам выбрать интенсивность разгона механизма в зависимости от нагрузки на валу двигателя или по показаниям тензодатчика.
По словам Александра Мосина, новейшее поколение приводов для насосов и вентиляторов ATV61/21 теперь имеет новые энергосберегающие алгоритмы управления двигателем, обеспечивает защиту насосного оборудования при прорыве трубы или отсутствии воды. Благодаря повышенной номинальной частоте коммутации 12 кГц двигатели насосов и вентиляторов будут работать практически бесшумно.
Простота и надежность
Рич Минц, менеджер продукции в SEW-Eurodrive, отметил большой интерес к прочным корпусам и возможности программирования скоростей, которые предлагает высокоэффективный привод Movidrive их компании. Исходя из своего опыта Минц утверждает, что простота и надежность все еще высоко ценятся среди потребителей, особенно при установке и обслуживании. Минц согласен с результатами опроса в том, что многие установки приводов ПТ остаются автономными. Он считает: «На данный момент небольшим производителям скорее всего не нужен усложненный привод, соединенный с полевой шиной. Пользователям нужна простота и совместимость изделий. Им также удобнее применять одни и те же инструментальные программные средства для приводов разной мощности, особенно для решения задач диагностики оборудования и поддержки операторского интерфейса»
По данным AutomationDirect современные пользователи приводов с регулируемой частотой стремятся получить улучшенные характеристики в отношении минимальной скорости, точное регулирование крутящего момента/скорости и повышенную надежность. «Если такие характеристики будут обеспечены, тогда решающим фактором для пользователей станет требование стабильного интегрированного четырехквадрант-ного режима работы», — утверждает Том Мэтиас, менеджер продукции приводов, двигателей и движения. При четырехк-вадрантном режиме часто используются громоздкие внешние рекуперативные блоки или неэффективные схемы динамического торможения. Вот почему ASD, выполняющий действительно линейную рекуперацию в рамках единого модуля — это исключительно полезное изделие. К числу его преимуществ относятся эффективность использования энергии, экономия места и уменьшение стоимости в разных применениях от подъемных кранов и прессов до управления HVAC.
Что касается тенденций, то здесь AutomationDirect видит применение ASD в таких областях, где до недавнего времени единственным подходящим решением были более дорогие сервосистемы. «В то время как ASD в основном использовались для точного регулирования скорости, приводы с векторным управлением в настоящее время могут также применяться для решения задач позиционирования, не требующих высокой производительности, таких, например, как резка по длине или устройства смены инструментов в станках», — замечает Мэтиас. Между тем экономичность и производительность приводов с регулируемой частотой стимулируют движение в направлении замены контроллеров «с управлением по проводам» в рамках всего производства. «Такие проблемы, как пусковые броски крутящего момента, можно уменьшить или устранить, что поможет продлить срок эксплуатации управляемого оборудования», — добавляет он.
ИЗДЕЛИЯ ASD
Интегрированные или автономные приводы
 Привод переменного тока Allen-Bradley PowerFlex 700S предназначен для эффективного управления и подходит как для интегрированных, так и для автономных применений. Передовая технология привода обеспечивает эффективность двигателя и возможность его защиты, а также безопасность и различные варианты обратной связи, что дает пользователю такие преимущества, как простота установки, программирования, поиска неисправностей и диагностики. PowerFlex 700S отличается усовершенствованными алгоритмами управления двигателем, которые, как сообщается, обеспечивают такие исключительные возможности как Force Technology (точная регулировка скорости и крутящего момента при нагруженном или холостом двигателе), SynchLink обеспечивает синхронизацию и связь между приводами и усовершенствованное регулирование скорости. Кроме того, имеется встроенный контроллер DriveLogic.
Привод переменного тока Allen-Bradley PowerFlex 700S предназначен для эффективного управления и подходит как для интегрированных, так и для автономных применений. Передовая технология привода обеспечивает эффективность двигателя и возможность его защиты, а также безопасность и различные варианты обратной связи, что дает пользователю такие преимущества, как простота установки, программирования, поиска неисправностей и диагностики. PowerFlex 700S отличается усовершенствованными алгоритмами управления двигателем, которые, как сообщается, обеспечивают такие исключительные возможности как Force Technology (точная регулировка скорости и крутящего момента при нагруженном или холостом двигателе), SynchLink обеспечивает синхронизацию и связь между приводами и усовершенствованное регулирование скорости. Кроме того, имеется встроенный контроллер DriveLogic.
www.rockwellautomation.ru
Rockwell Automation
Рекуперативный привод мощностью до 1120 кВт

Рекуперативный привод серий ACS800-11/17, охватывающий диапазон мощностей от 90кВт до 1120 кВт, дополняет линию приводов компании ABB. Его также называют четырехквадрантным приводом. При работе привода как в двигательном, так и в генераторном режиме, коэффициент мощности. Он включает в себя активный выпрямитель вместо пассивного диодного выпрямителя, применяющегося в обычных приводах, и поставляется со встроенным LCL фильтром для подавления гармоник. Управляющая часть привода построена на методе прямого управления моментом (DTC), который существенно улучшает точность регулирования и не требует использования датчиков скорости на валу двигателя. Также достоинствам привода ACS800 является его компактная конструкция, что облегчает задачу установки и ввода привода в эксплуатацию.
www.abb.ru/ibs
ООО «АББ Индустри и Стройтехника»
Мощные универсальные приводы SINAMICS
 Семейство приводов Sinamics G130, G150, S150 — это мощные приводы переменного тока со звеном постоянного напряжения, охватывающие диапазон мощностей от 75 кВт до 1500 кВт при напряжениях 380-480В, 500-600В, 600-690В. Приводы предназначены для самых разных применений, таких как насосы, вентиляторы, смесители, экс-трудеры, мельницы (дробилки), конвейеры и д.р. Для наиболее требовательных задач используются Sinamics S150, поддерживающие рекуперацию энергии и компенсацию реактивной мощности. Приводы поставляются во встраиваемом исполнении (G130), комплектном шкафном исполнении с коммутационными устройствами (G150 версия А, S150), шкафном исполнении без коммутационных устройств (G150 версия С), со степенями защиты вплоть до IP54. Интерфейс Profibus DP и разнообразие входов и выходов в стандартной комплектации предлагает богатые коммуникационные возможности. Современное программное обеспечение с автонастройкой и богатый набор дополнительных опций обеспечивает готовое к подключению решение по принципу < ->. Конструкция преобразователей включает запатентованные решения и компоненты, обеспечивающие компактность, высокий КПД, низкий уровень шума и эффективное охлаждение.
Семейство приводов Sinamics G130, G150, S150 — это мощные приводы переменного тока со звеном постоянного напряжения, охватывающие диапазон мощностей от 75 кВт до 1500 кВт при напряжениях 380-480В, 500-600В, 600-690В. Приводы предназначены для самых разных применений, таких как насосы, вентиляторы, смесители, экс-трудеры, мельницы (дробилки), конвейеры и д.р. Для наиболее требовательных задач используются Sinamics S150, поддерживающие рекуперацию энергии и компенсацию реактивной мощности. Приводы поставляются во встраиваемом исполнении (G130), комплектном шкафном исполнении с коммутационными устройствами (G150 версия А, S150), шкафном исполнении без коммутационных устройств (G150 версия С), со степенями защиты вплоть до IP54. Интерфейс Profibus DP и разнообразие входов и выходов в стандартной комплектации предлагает богатые коммуникационные возможности. Современное программное обеспечение с автонастройкой и богатый набор дополнительных опций обеспечивает готовое к подключению решение по принципу < ->. Конструкция преобразователей включает запатентованные решения и компоненты, обеспечивающие компактность, высокий КПД, низкий уровень шума и эффективное охлаждение.
www.siemens.ru/ad
Siemens
Различные способы монтажа приводов
 Приводы Decentral Drive отличаются прочной конструкцией и особенно пригодны для применения в конвейерных линиях автозаводов, при изготовлении продуктов питания/напитков и в отраслях, связанных с транспортировкой материалов. Мощность приводов может изменяться в диапазоне 0,4-7,5 кВт при 3-фазном напряжении 380-480 В. Они поддерживают такие шинные протоколы связи, как RS-485, Profibus, Device-Net или AS-i. Универсальный привод VTL Decentral можно использовать с любым стандартным двигателем переменного тока, его можно устанавливать на стене или непосредственно на применяемом оборудовании.
Приводы Decentral Drive отличаются прочной конструкцией и особенно пригодны для применения в конвейерных линиях автозаводов, при изготовлении продуктов питания/напитков и в отраслях, связанных с транспортировкой материалов. Мощность приводов может изменяться в диапазоне 0,4-7,5 кВт при 3-фазном напряжении 380-480 В. Они поддерживают такие шинные протоколы связи, как RS-485, Profibus, Device-Net или AS-i. Универсальный привод VTL Decentral можно использовать с любым стандартным двигателем переменного тока, его можно устанавливать на стене или непосредственно на применяемом оборудовании.
www.danfoss.ru
Danfoss Drives
Commander SK — удобство и многофункциональность
 Относительно недавно компания Control Techniques (Великобритания) поразила всех еще более интересным электроприводом Commander SK, который по-новому определил значимость небольших (до 132 кВт) универсальных приводов переменного тока. Огромный выигрыш в производительности и экономичности достигается за счет многообразия внутренних функций и удивительной простоты настройки, при этом необходимая конфигурация создается с помощью простой светодиодной панели или наглядного ПО СТ Soft. Существенным преимуществом электроприводов Commander SK является встроенный ПЛК с развитой математикой, открытая структура привода и функция управления тормозами для подъемно-транспортных механизмов. ПЛК активируется с помощью введения «LogicStick», программирование которого выполняется свободно распространяемым бесплатным ПО IEC 61131-3 с лестничной логикой. Использование модулей расширения входов/выходов или сетевых модулей (Profibus DP, Ethernet TCP/IP и др.) позволяет разрабатывать экономичные и удобные в эксплуатации системы. Свободно распространяемое программное обеспечение, в том числе высокоскоростной осциллограф, предоставляет дополнительные возможности для пользователей.
Относительно недавно компания Control Techniques (Великобритания) поразила всех еще более интересным электроприводом Commander SK, который по-новому определил значимость небольших (до 132 кВт) универсальных приводов переменного тока. Огромный выигрыш в производительности и экономичности достигается за счет многообразия внутренних функций и удивительной простоты настройки, при этом необходимая конфигурация создается с помощью простой светодиодной панели или наглядного ПО СТ Soft. Существенным преимуществом электроприводов Commander SK является встроенный ПЛК с развитой математикой, открытая структура привода и функция управления тормозами для подъемно-транспортных механизмов. ПЛК активируется с помощью введения «LogicStick», программирование которого выполняется свободно распространяемым бесплатным ПО IEC 61131-3 с лестничной логикой. Использование модулей расширения входов/выходов или сетевых модулей (Profibus DP, Ethernet TCP/IP и др.) позволяет разрабатывать экономичные и удобные в эксплуатации системы. Свободно распространяемое программное обеспечение, в том числе высокоскоростной осциллограф, предоставляет дополнительные возможности для пользователей.
www.controltechniques.com
Emerson Control Techniques
Регулирование крутящего момента и положения

FR-A700 — это высокопроизводительный интеллектуальный привод, предназначенный для управления двигателями переменного тока в широком диапазоне мощностей от 0,4 до 500 кВт. Он поставляется со встроенным ПЛК и отличается специальными технологиями, такими, например, как адаптивная автонастройка, которая компенсирует изменения инерции нагрузки. Первоначально такие технологии были разработаны для сервоприводов, выпускаемых компанией. Результатом применения этих технологий является более плавная работа, меньшее время простоя и низкие эксплуатационные расходы. Используя обратную связь через энкодер в режиме векторного управления, привод A700 может создавать крутящий момент при нулевой скорости, что позволяет регулировать положение. С заявленной скоростью отклика 300 рад/с новый привод может быстро реагировать на внезапные изменения нагрузки. Благодаря недавно разработанному алгоритму «Real Sensor-less Vector ”, который обеспечивает диапазон скорости 200:1, A700 можно также использовать и без датчика. Способность регулировать момент и скорость делает его идеальным для таких применений, где должно поддерживаться постоянное натяжение, например при управлении намоткой/разматыванием.
www.mitsubishi-automation.ru
Mitsubishi Electric
«Трехуровневый» привод переменного тока с сервоподобным управлением
Привод G7 для диапазона напряжений от 380 до 480 В отличается » трехуровневой» архитектурой, ставшей удачным решением для применений, в которых необходимы высокие показатели управления скоростью, моментом и положением в сочетании с низким шумом двигателя. По данным компании, улучшенные характеристики скорости и крутящего момента достигаются благодаря более быстрому и точному измерению выходного сигнала; а модернизированный метод управления ШИМ обеспечивает превосходное управление крутящим моментом на низких скоростях — 150% при 0,3 Гц без датчика обратной связи. Трехуровневая архитектура значительно продлевает срок службы двигателя за счет уменьшения пиковых величин напряжения и утечек тока через изоляцию и подшипники, одновременно предоставляя возможность использовать длинные кабели (до 300м). Низкий уровень создаваемых радиочастотных помех позволяет отказаться от RF- и dV/dt фильтров в большинстве случаев, где такие фильтры потребовались бы при использовании инверторов с традиционной архитектурой.
www.yaskawa.de
Yaskawa Electric Europe
Специализированные приводы расширяют серию SVX9000
 Частотно-регулируемые приводы SVX9000 под торговой маркой Cutler-Hammer были расширены за счет новых «редакций», приспособленных для специфических областей применения. Сейчас серия изделий включает в себя SPX9000 — высокоэффективный привод с 32-разрядным процессором и увеличенным объемом памяти; LCX9000 — привод с жидкостным охлаждением и привод с высококачественным питанием CPX9000 — 18-пульсный привод с низким уровнем гармоник, который без дополнительного оборудования соответствует всем требованиям стандарта IEEE-519 на гармоники. Эти модели используют общую архитектуру управления и имеют одинаковую компактную модульную конструкцию.
Частотно-регулируемые приводы SVX9000 под торговой маркой Cutler-Hammer были расширены за счет новых «редакций», приспособленных для специфических областей применения. Сейчас серия изделий включает в себя SPX9000 — высокоэффективный привод с 32-разрядным процессором и увеличенным объемом памяти; LCX9000 — привод с жидкостным охлаждением и привод с высококачественным питанием CPX9000 — 18-пульсный привод с низким уровнем гармоник, который без дополнительного оборудования соответствует всем требованиям стандарта IEEE-519 на гармоники. Эти модели используют общую архитектуру управления и имеют одинаковую компактную модульную конструкцию.
www.cutler-hammer.eaton.com
Eaton Corp.
Гибкий привод работает в новом и модернизированном оборудовании
В компании Schneider Electric утверждают, что разработанный для применения в новых и модернизированных насосах и вентиляторах защищенный привод переменного тока Square D S-Flex с мощностью 0,75-15 кВт при 460 В может служить альтернативой многофункциональному защищенному приводу, позволяя проще приспосабливаться к последним изменениям проекта, а также к требованиям модернизации после выхода изделия на рынок. Заслуживают внимания такие характеристики привода S-Flex, как совместимость с NEC2005 Article 409 (соответствует всем новым требованиям для промышленных панелей управления с номинальными параметрами 100000 AIC без плавких предохранителей) и взаимодействие всех устройств управления через специальные межсоединения, что сводит к минимуму вероятность неправильного монтажа. Сюда же относятся восстанавливаемая защита от недопустимых перегрузок по току и шунтирующая цепь, а также встроенный стабилизатор тока сети, установленный по перегреву на 150% для экономичного ослабления гармоник и защиты от скачков напряжения. S-Flex входит в перечень UL508A, поставляется в собранном и смонтированном виде и включает в себя привод Altivar 31 (торговая марка Telemecanique) для обеспечения гибкости управления.
www.schneider-electric.ru
Schneider Electric
Большее число функций, устойчивость к перегрузкам, пониженная скорость
Movidrive B — инвертор с большим числом базовых функций, расширенным диапазоном низких скоростей и повышенной перегрузочной способностью. Стандартное исполнение Movidrive B включает в себя фирменную интегрированную систему управления позиционированием и циклом работы IPOSplus и может быть расширено с помощью всех имеющихся вариантов. В прикладном исполнении добавлены такие возможности, как электронный редуктор и электронный шаблон, а также руководства по быстрому запуску таких приложений, как «позиционирование поворотного стола» (32 дискретных точки или позиция через полевую шину), «летающий нож» и «контроль намотки»
www.sew-eurodrive.ru
SEW-EURODRIVE
Три новые модели с однофазным входом
Расширение серии приводов переменного тока GS2 включает в себя три модели мощностью 200, 400 и 750 Вт. Все они имеют 115 В однофазный вход и 230 В трехфазный выход. Эти приводы предназначены для работы в таких условиях, где нет 230 В источника питания, и для таких применений, как вентиляторы, насосы и обычное управление двигателями. Новые модели предлагают все возможности существующих приводов серии GS2, включая интегрированное ПИД-регулирование, съемную клавиатуру с потенциометром, установленные на плате соединения RS-232/485 и Mod-bus, плюс возможность подключения интерфейса Ethernet.
www.automationdirect.com
AutomationDirect
Встроенный ПЛК повышает интеллектуальность привода
Плата P10CDT устанавливается непосредственно в корпус инвертора переменного тока 3G3MV или CIMR-V7, предоставляя ему не только 6 дополнительных входов и 3 выхода, но и такие функции ПЛК Omron CPM2C, как календарь и часы реального времени, 2 порта связи RS232C и RS422/485 cо свободно настраиваемыми протоколами, обработку прерываний и сигналов с внешних энкодеров. Объединение функциональных возможностей в одном изделии снижает объем монтажных соединений и увеличивает гибкость управления. Это устройство было разработано для уменьшения пространства установки, стоимости и времени, а также с целью создания встроенного управления для новых или уже существующих применений инверторов. ПЛК встраивается в привод, что обеспечивает доступ из программы ПЛК ко всем функциям и параметрам инвертора и добавляет ему новые интеллектуальные возможности,
www.omron-industrial.com
Omron Europe
Вконтакте
Google+
Открытый проект модуля управления электрическими моторами. Начало / Habr
Основное назначение модуля — управление синхронными бесколлекторными двигателями (BLDC, BLAC, PMSM …) с трапецеидальной или синусоидальной формой напряжения, с сенсорами скорости-положения или без сенсоров. Кроме этого модуль имеет небольшие габариты, достаточно широкий диапазон питающих напряжений, разнообразные каналы отладки, проводную и беспроводную связь.
Мощность управляемых модулем двигателей может быть в пределах нескольких сотен ватт и напряжение до 30В. Это двигатели различных механизмов и устройств, таких как: 3D-принтеры, автоматические двери, автоматические роллеты, автономные насосы, вентиляторы, замки, электроинструмент, стабилизаторы положения, моторы и сервомеханизмы RC моделей, роботов и проч.
Но этим применение модуля не ограничивается. Его можно использовать с незначительными дополнениями для управления соленоидами, шаговыми двигателями, для управления освещением, в качестве мощного зарядного устройства, как регулятор напряжения, как мощный источник аудио сигналов, как высокоамперный ключ с измерителем тока, да и просто как отладочную платформу.
Словом, такой модуль в хозяйстве инженера может быть очень полезным.
Все эти свойства модуля получаются благодаря классической 3-х фазной полумостовой схеме с датчиками тока и напряжения и производительному микроконтроллеру.
(Кликнуть для увеличения)
Для ускорения процесса разработки схемы силовой части был взят за основу один из типовых проектов, предлагаемых фирмой TI.
Я остановился на проекте платы TIDA-00901.
(Кликнуть для увеличения)
Плата обладает хорошими характеристиками: ток до 20 A, мощность двигателя до 200 Вт, номинальное напряжение 12 В. Предназначена для эксплуатации в автомобиле.
В качестве драйвера силовых ключей используется микросхема DRV8305. Некоторые поиски привели к выводу, что это одна из лучших микросхем драйверов для таких приложений.
Очень полезным для разработки является документ Automotive 12 V 200 W (20 A) BLDC Motor Drive Reference Design.
Плата имеет специфическую круглую форму, в качестве управляющего элемента применен контроллер C2000 LaunchPad. К сожалению программное обеспечение предоставляется не полностью открытым в части библиотек управления моторами. C2000 LaunchPad выполнен на базе DSP процессора семейства F2802x Piccolo. Это семейство процессоров специализировано для разработки несложных преобразователей энергии, и не отличается большой универсальностью и объемом ресурсов.
Архитектура модуля.
В данном проекте решено было выполнить модуль в виде составной конструкции из 2-х плат. Основная плата содержит силовой драйвер, подсистему питания и некоторые периферийные функции. На основную плату устанавливается плата процессора. В качестве процессорной выбрана
плата проекта K66BLEZ1 (ещё статьи по этому проекту — 1, 2, 3, 4 ) с микроконтроллером семейства Kinetis фирмы NXP на базе ядра ARM Cortex-M4. (180 МГц, 2 МБ Flash память, 256 КБ ОЗУ + micro SD карта, часы реального времени с автономным питанием, USB device/host high speed, отдельный чип Bluetooth LE 4/ZigBee )
(Кликнуть для увеличения)
Модуль питается в диапазоне напряжений от 8.5 до 30 В. Несколько датчиков температуры — в микроконтроллере, вблизи силовых ключей и один внешний предохраняют модуль и мотор от опасных перегревов. Вся элементная база подобрана для работы при температуре до -40 град. С.
Силовые ключи управления мотором рассчитаны на ток в импульсе до 200 А. Измерение тока производится резистивными шунтами с сопротивлением 0.001 Ом. Благодаря встроенным в микросхему драйвера DRV8305 регулируемым усилителям, модуль способен измерять токи от 300 А и до 0.1 А.
Шина CAN дает возможность объединять множество подобных модулей в общую синхронизированную сеть.
Микросхема MPU-9250 полезна в случае если требуется управление ориентацией модуля в пространстве и инерциальная навигация, а также для мониторинга вибраций и ударов.
Встроенный в модуль DС-DC преобразователь с выходным напряжением 5В рассчитан на ток до 3.5 А. Сам модуль потребляет от этого преобразователя не более 150 мА, остальной запас тока может быть отдан на внешнюю нагрузку с разъема X4. Разъем X4 удобно использовать для подключения элементов освещения и индикации, таких как светодиодные RGB ленты на основе чипов WS2812B и аналогичных. Процессором аппаратно поддерживается формирование на цифровых выходах протокола кодирования бит в формате WS2812B, а также PPM, PCM, PWM кодирование. Аналогично без труда с минимальной загрузкой процессора модуль может принимать PPM и PCM сигналы.
Расчет максимальной частоты переключения и обоснование выбора силовых транзисторов
Перепроверим таблицу сравнения транзисторов, предлагаемую в документе от TI. Все параметры заново выписаны из даташитов.
(Кликнуть для увеличения)
Здесь у меня, как и у специалистов TI выбор пал на CSD1854Q5B. По величине максимального тока это лучший выбор. А частота переключения в 122 КГц далеко уходит за разумный предел достижимый при управлении от семейства Kinetis.
Расчет максимальной пульсации тока и обоснование выбора фильтрующих конденсаторов
Пульсации тока непосредственно влияют на нагрев и срок службы конденсаторов в особенности электролитических. Поэтому необходимо подбирать конденсаторы по типу и номиналу, учитывая расчетный срок службы и максимальные токи.
Пользуясь этой формулой следует проверять способен ли модуль управлять данным мотором без превышения максимальных токов конденсаторов.
Как подсчитали специалисты TI при указанных на схеме конденсаторах модуль на частоте ШИМ 40 КГц может долгое время питать застопоренный мотор с током через обмотки более 80 А.
Схема основной платы модуля
(Кликнуть для увеличения)
(Кликнуть для увеличения)
Расположение разъёмов
Вид на основную плату сверху:
(Кликнуть для увеличения)
Вид на основную плату снизу
(Кликнуть для увеличения)
Габариты
(Кликнуть для увеличения)
Репозиторий проекта
Все материалы относящиеся к проекту хранятся здесь.
Схема и печатная плата разработаны в среде Altium Designer 17.0.6.
В репозитории можно найти 3D модель сборки в формате STEP.
Там же лежит файл расчетов для DC-DC преобразователя на A8586 в формате Mathcad.
Программная часть проекта будет рассмотрена в следующей статье.
Скалярное управление
Дмитрий Левкин
Скалярное управление (частотное) — метод управления бесщеточным электродвигателем переменного тока, который заключается в том, чтобы поддерживать постоянным отношение напряжение/частота (В/Гц) во всем рабочем диапазоне скоростей, при этом контролируется только величина и частота питающего напряжения.Отношение В/Гц вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения В/Гц мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение В/Гц увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в недовозбужденном состоянии.

Зависимость частоты питания двигателя от времени при скалярном упрравлении

Изменение напряжения питания электродвигателя при скалярном управлении
На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение В/Гц на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями.
В применении к асинхронным двигателям
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение В/Гц должно быть постоянным на разных скоростях.

Скалярное управление без датчика скорости
При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения [2].

Скалярное управление с датчиком скорости
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для приложений, где нет переменной нагрузки и не требуется хорошая динамика (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения. Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
СДПМ со скалярным методом управления может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для контроля СДПМ на низких оборотах для приложений, требующих высокую динамику [1].
- Метод скалярного управления относительно прост в реализации, но обладает несколькими существенными недостатками:
- во-первых, если не установлен датчик скорости нельзя управлять скоростью вращения вала асинхронного двигателя, так как она зависит от нагрузки (наличие датчика скорости решает эту проблему), а вслучае с синхронным двигателем при изменении нагрузки — можно совсем потерять управление;
- во-вторых, нельзя управлять моментом. Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
- также нельзя управлять одновременно моментом и скоростью.
Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
Выбор системы управления двигателем электромобиля
Библиографическое описание:
Варзаносов П. В. Выбор системы управления двигателем электромобиля [Текст] // Технические науки в России и за рубежом: материалы VI Междунар. науч. конф. (г. Москва, ноябрь 2016 г.). — М.: Буки-Веди, 2016. С. 47-51. URL https://moluch.ru/conf/tech/archive/228/11297/ (дата обращения: 23.03.2020).
Ключевые слова: электромобиль, система управления электроприводом, векторное управление
Электромобиль — современное новое экологичное средство передвижения. Несмотря на большую популярность бензиновых автомобилей, неизбежное будущее будет за машинами, не загрязняющими окружающую среду. И тенденция развития электротранспорта вполне логична. Растущие цены на бензин заставляют задумать об экономичности использования автомобилей с бензиновым двигателем, растущий уровень шума в городах, производимый машинами пагубно влияет на здоровье граждан. Эти и многие другие факторы привели к тому, что каждая ведущая автомобильная компания взялась за разработку собственного электромобиля [1]. Качественным отличием электромобиля от автомобиля является использование асинхронного либо синхронного трехфазного электродвигателя вместо традиционного бензинового. Управление мотором электродвигателя требует определенного быстродействия и создания необходимого момента на валу. Для этих целей используют различные системы управления электродвигателем. О выборе системы управления для электромобиля будет рассказано в этой статье.
Для того чтобы понять какое место занимает электродвигатель в машине и каким образом происходит управление, рассмотрим блок-схему перспективного электромобиля, представленную на рисунке 1 [3]. На схеме изображены основные элементы, а именно:
‒ электродвигатель;
‒ питающая аккумуляторная батарея;
‒ упрощенная трансмиссия, оснащенная одноступенчатым редуктором;
‒ инвертор;
‒ зарядное устройство на борту, чтобы обеспечивать возможность зарядки от бытовой розетки;
‒ электронная система управления элементами конструкции;
‒ DC-DC преобразователь;
‒ вспомогательная батарея, которая используется в качестве питающего элемента климат-контроля, аудиосистемы, освещения.
‒ управление электромобилем [2].
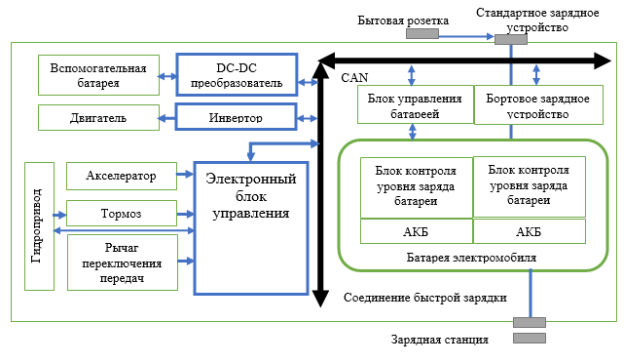
Рис. 1. Блок-схема электромобиля
Инвертор — это элемент, которые преобразует постоянный ток в трехфазный переменный, а также включает в себя систему управления двигателями. Чтобы понять, какие параметры влияют на систему управления, рассмотрим структуру инвертора, изображенную на рисунке 2 [3].
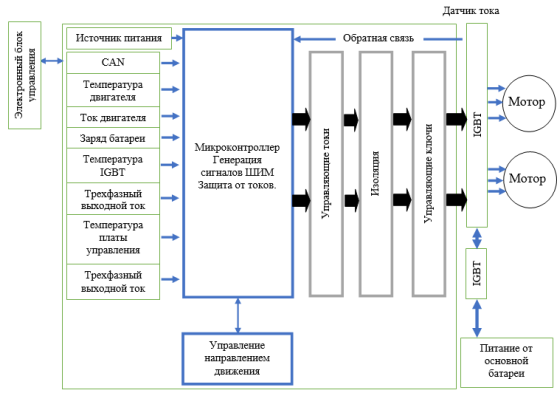
Рис. 2. Блок-схема инвертора
Опыт различных компаний в создании и реализации электромобилей, накопленный к настоящему моменту позволяют выдвинуть определенные требования не только к самому электромобилю, но и к системе управления приводом автомобиля, в частности. Из всего ряда требований, выдвигаемых к электромобилю, выберем те, что относятся к системе управления двигателем и улучшают потребительские качества автомобиля, как средства передвижения.
Основные требования к системе управления электроприводом:
‒ плавное изменение скорости;
‒ стабильность автоматического поддержания установленной водителем скорости не ниже 10 %, данное требование позволяет энергетически выгодно использовать энергию в условиях городской эксплуатации;
‒ плавное управление тяговым и тормозным моментом при разгоне и торможении соответственно;
‒ автоматическое ограничение максимального момента и мощности на определенном уровне;
‒ ограничение зарядного тока при рекуперативном торможении, при определенном уровне заряда;
‒ возможность движения в режиме наката с последующим плавным разгоном или электрическим торможением;
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет скоростью и моментом двигателя за счет изменения частоты, напряжения, промежуточных токов в различных системах координат. Основные методы управления представлены на рисунке 3.
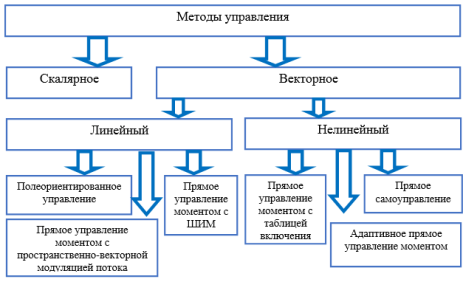
Рис. 3. Методы управления [5].
Рассмотрим системы управления, наиболее часто использующиеся в различных частотных преобразователях.
Скалярное управление или как его еще называют частотное, так как этот метод управления электродвигателем переменного тока заключается в том, что поддерживается постоянное соотношение напряжение/частота во всем рабочем диапазоне скоростей, следственно изменяя частоту изменяется напряжение, а за ним и скорость вращения ротора. Это отношение вычисляется исходя из номинальных значений напряжения и частоты. Поддерживание этого соотношения на определенном уровне, можно поддерживать магнитный поток на определенном уровне. Существенным плюсом этой системы является простота ее реализации. Этот единственный плюс нивелируется такими недостатками как:
‒ Невозможно реализовать бездатчиковую систему управления асинхронным двигателем с набросом нагрузки, а система с датчиком скорости имеет низкую точность управления с нагрузкой, синхронный двигатель может вовсе выйти из синхронизма при увеличении момента выше предельного;
‒ Невозможно одновременно управлять и моментом, и скоростью двигателя;
Чаще всего скалярное управление используется в системах с большим диапазоном регулирования скорости. В нашем случае, данная система управления не подходит в виду того, что в электромобиле необходима точная регулировка скорости с нагрузкой на валу, а также в виду того, что скалярное управление не позволяет плавно изменять момент на валу.
Векторное управление, в отличие от скалярного, позволяет независимо и практически безынерционно управлять скоростью вращения и моментом на валу двигателя. Как показывает практика, недостаточно управлять напряжением и частотой, необходимо управлять и фазой, то есть контролировать значение и угол пространственного вектора [4]. Существующие методы управления моментом обычно классифицируют на две группы исходя из того, какие по своей структуре используются регуляторы, а именно: линейные и нелинейные (гистерезисные). В данной статье не подразумевается производить глубокий анализ всех систем управления в виду емкости теории по каждой из них, поэтому рассмотрим особенности, преимущества и недостатки векторных систем с управлением моментом.
Полеориентированное управление подразумевает отдельное управление как моментом, так и полем статора с помощью составляющих вектора поля статора. Все особенности этой системы связаны с указанием в программе правильных и точных характеристик двигателя, то есть использовать адекватную модель электропривода [6]. При использовании системы с прямым управлением моментом с пространственно-векторной модуляцией напряжения необходимо точно вычислять нагрузку на валу, линейность регулятора уменьшает пульсации момента, позволяет плавно запускать двигатель и уверенно работать на низких оборотах, но ухудшает динамические характеристики. Особенностью нелинейного регулятора с прямым управлением моментом заключается в том, что порядок включения транзисторных ключей определяется таблицей, в которой заключены различные состояния вектора напряжения. Характеристики системы зависят от ее настройки и частоты сравнения с вектором напряжения. Увеличение частоты приводит к увеличению стоимости соответственно. Характерными особенностями прямого управления является полное использование возможностей инвертора по напряжению, а также отличная динамика при работе с постоянным и ослабевающим полем.
Наиболее подходящей для системы управления электромобиля является система векторного управления с прямым управлением моментом с таблицей включения. Отразив в таблице все возможные состояния вектора и увеличив частоту итераций можно получить отличные и статические, и динамические характеристики, а также удовлетворить всем другим требованиям, выдвинутым к системе. На данном этапе развития электромобилей эта система управления однозначно приведет к существенному удорожанию системы управления, а следственно и всего электромобиля, но в дальнейшем, по мере увеличения популярности электрокаров, по прогнозам экспертов, цена снизится, а вот качество управления останется на высоком уровне.
Литература:
- Варзаносов П. В.Анализ преимуществ и недостатков видов легкого электротранспорта / В сборнике: Технические науки: проблемы и перспективы Материалы IV Международной научной конференции. 2016. С. 89–91.
- http://autoleek.ru/dvigatel/jelektricheskij-dvigatel/ustrojstvo-jelektromobilja.html (дата обращения 29.10.2016)
- http://toshiba.semicon-storage.com/ru/application/automotive/ecology/hev-ev.html (дата обращения 29.10.2016)
- CristianBusca. Открытый контур управления низкой скорости для СДПМ в высоком динамическом приложении. — Ольборг, Дания.: Ольборг университет, 2010.
- http://engineering-solutions.ru/motorcontrol/vfd/ (дата обращения 29.10.2016)
6. Семыкина И. Ю., Завьялов В. М. Сравнительный анализ систем регулирования угловой скорости асинхронного электродвигателя / Вестник Кузбасского государственного технического университета 2005. № 6 (51). С. 61–66.
Основные термины (генерируются автоматически): система управления, прямое управление, векторное управление, скалярное управление, момент, система, DC-DC, напряжение, метод управления, электродвигатель.
Похожие статьи
Обзор алгоритмов управления асинхронными электроприводами
Векторное управление, ориентированное по роторному потоку, для асинхронного двигателя, питающегося от источника тока.
Рис. 3. Система управления позицией асинхронного двигателя прямым методом.
Векторное управление активным выпрямителем напряжения
Исследование системы векторного управления…
Система управления скоростью (позицией) вращения асинхронного двигателя в косвенной форме.
прямое преобразование координат, задание матрицы, система уравнений, система координат, график напряжений…
асинхронный двигатель, система управления, векторное…
Обзор алгоритмов управления асинхронными электроприводами. асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора…
Исследование системы векторного управления…
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод
Обзор алгоритмов управления асинхронными электроприводами. асинхронный двигатель, система управления, векторное…
блок, ABC, асинхронный двигатель, векторное управление…
Векторное управление активным выпрямителем напряжения. В этой системе управления блок преобразования координат «XY-ABC» осуществляет преобразование проекций Ix и Iy обобщенного вектора сетевого тока из вращающейся системы координат к трехфазной…
Обзор систем управления приводом складских транспортных…
система управления, магнитный поток, прямое управление, платформа, прямое управление момента, вентильный электродвигатель, векторное управление, векторная система управления…
Моделирование прямого пуска асинхронного двигателя с ШИМ…
Обзор алгоритмов управления асинхронными электроприводами. 4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя.
Система автоматического управления малоразмерным…
система управления, прямое управление, векторное управление, скалярное управление, момент. Система автоматического управления малоразмерным газотурбинным двигателем.
Математическая модель САР скорости линейного асинхронного…
Элементы системы управления (ЗИ, фильтры, регуляторы) «привязаны» к вращающейся системе координат, а
Рис. 20. График скорости и момента в замкнутой системе.
Векторное управление активным выпрямителем напряжения. Скачать Часть 2 (pdf).
Электропривод и его основные компоненты
Электрический привод, сокращенно электропривод — электромеханическая система, состоящая в общем случае из взаимодействующих преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса [1].
Функциональная схема электропривода, где ЭП — электрический преобразователь, ИУ — информационное устройство, ЭМП — электромеханический преобразователь (электродвигатель), МП — механический преобразователь, ИО — исполнительный орган.
Основные компоненты
Электродвигатель
Электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую.
Система управления электропривода
Совокупность управляющих и информационных устройств и устройств сопряжения электропривода, предназначенных для управления электромеханическим преобразованием энергии с целью обеспечения заданного движения исполнительного органа рабочей машины.
Механический преобразователь
Предназначен для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласованию вида и скоростей их движения.
- Вращательный
- Прямолинейный
- Поступательный
- Со сложным движением
Полезная информация
База знаний
Описание разных видов электромеханических преобразователей и электрических машин в частности. Ключевые даты истории создания электродвигателя.