


Реостатное управление электродвигателем | БЛОГ ЭЛЕКТРОМЕХАНИКА
Реостатное управление является простейшим способом управления двигателем. При этом способе обычно осуществляется пуск, остановка и в некоторых случаях регулирование скорости вращения (для электродвигателей постоянного тока).При постоянном токе пусковой реостат включается последовательно с обмоткой якоря электродвигателя. Сопротивление обмотки якоря очень незначительно (оно измеряется сотыми или десятыми долями ома), и если бы в момент пуска электродвигателя в ход подключить ее непосредственно к сети на полное напряжение последней, то по обмотке пройдет очень большой ток, который может сжечь изоляцию обмотки. Вводя последовательно обмотке якоря пусковой реостат, мы увеличиваем сопротивление цепи и, следовательно, уменьшаем проходящий в обмотке ток.
Когда якорь вследствие взаимодействия между проходящим по его обмотке током и магнитным полем приходит во вращение, то в обмотке якоря, последовательно с которой в первый момент бывает включено все сопротивление пускового реостата, возникает противоэлектродвижущая сила.
Якорь вращается со скоростью, меньшей нормальной. Тогда передвижением рукоятки пускового реостата выводят часть (секцию или ступень) его сопротивления из цепи якоря. Вследствие этого ток в якоре возрастает, увеличивается скорость вращения якоря и растет противоэлектродвижущая сила, уменьшается ток и устанавливается новая (большая чем первая) скорость вращения ротора. Затем выводят из цепи якоря следующую ступень реостата и т. д., пока все сопротивление реостата не будет выведено из цепи якоря. При полностью выведенном сопротивлении реостата электродвигатель развивает полное (нормальное) число оборотов, противоэлектродвижущая сила достигает наибольшего значения, и ток в якоре, даже при выведенном сопротивлении, не достигает значений, угрожающих изоляции обмотки.

Таким образом, в начале пуска электродвигателя в ход пусковой реостат должен быть полностью введен в цепь якоря, а к концу пуска — полностью выведен. Пуск электродвигателя занимает лишь несколько секунд. Пусковой реостат не рассчитан на длительное прохождение по нему тока, поэтому оставлять долго ту или иную ступень (секцию) его под током нельзя. Однако и слишком быстрое выведение реостата из цепи якоря также недопустимо, так как изоляция обмотки якоря может при этом сгореть. Передвигать рукоятку реостата следует не слишком быстро, плавно, без рывков.
При реостатном управлении регулирование скорости электродвигателя осуществляется путем изменения его магнитного потока.
Рассмотрим соединение регулировочного реостата с двигателем параллельного возбуждения, изображенное на рис. 1.
Рис. 1. Соединение регулировочного реостата с двигателем параллельного возбуждения
В показанном на рисунке положении ток от одного зажима Я1 электродвигателя идет по обмотке возбуждения Ш2 — Ш1, поступает в клемму реостата Ш, а отсюда через рукоятку реостата, плоское контактное кольцо и клемму Л возвращается ко второму полюсу Я2 двигателя.
 При этом ток не проходит по спиралям реостаа сопротивление реостата, как говорят, выведено. Поэтому по обмотке возбуждения Ш1 — Ш2 будет протекать полный намагничивающий ток. Если же передвинуть рукоятку реостата по часовой стрелке, то в цепь возбуждения окажется включенной часть сопротивления реостата. Тогда сила тока возбуждения и магнитный поток уменьшатся, скорость вращения якоря возрастет.
При этом ток не проходит по спиралям реостаа сопротивление реостата, как говорят, выведено. Поэтому по обмотке возбуждения Ш1 — Ш2 будет протекать полный намагничивающий ток. Если же передвинуть рукоятку реостата по часовой стрелке, то в цепь возбуждения окажется включенной часть сопротивления реостата. Тогда сила тока возбуждения и магнитный поток уменьшатся, скорость вращения якоря возрастет.
Для регулирования скорости вращения двигателя последовательного возбуждения путем изменения магнитного потока регулировочный реостат соединяется с электродвигателем так, как показано на рис. 2. Регулировочный реостат R включается параллельно обмотке возбуждения Rдв. Ток сети I, пройдя через якорь Я, разветвляется: часть его Iдв проходит в обмотке возбуждения и часть Iд — в сопротивлении реостата. При уменьшении сопротивления реостата ток в обмотке возбуждения уменьшится и скорость двигателя увеличится. Надо заметить, что регулирование этим способом скорости вращения двигателя последовательного возбуждения сопровождается гораздо большей потерей электроэнергии, чем регулирование скорости двигателя параллельного возбуждения, т.
Рис. 2. Регулирование скорости вращения двигателя последовательного возбуждения
Рис. 3. Принципиальная схема присоединения к сети двигателя параллельного возбуждения
Регулировочные реостаты применяются не всегда, так как в целом ряде случаев регулирования скорости двигателей не требуется.
На рис.3 приведена упрощенная принципиальная схема присоединения к сети двигателя параллельного возбуждения. Двигатель присоединяется к сети через двухполюсный рубильник и следующий за рубильником двухполюсный предохранитель (для того чтобы в случае перегорания плавкой вставки предохранителя можно было разомкнуть рубильник и заменить перегоревшую вставку новой, не подвергаясь опасности поражения электрическим током)./F036M_(6-90V-15A)-04.JPG)
Одновременно с этим обмотка возбуждения оказывается подключенной на полное напряжение сети через изогнутую планку реостата в.
Перемещая затем рукоятку пускового реостата вправо не слишком быстрым, плавным движением, устанавливают ее на последнем рабочем контакте б, т. е. постепенно выводят все сопротивление реостата из цепи якоря, вследствие чего скорость двигателя достигает номинальной величины.
При остановке двигателя рекомендуется отключить его от сети пусковым реостатом, для чего переводят рукоятку его быстрым движением на холостой контакт и тем самым разрывают цепь якоря, после чего размыкают рубильник. Если соединить проводником л контактную планку с первым рабочим контактом, то при переводе рукоятки реостата на холостой контакт мы не разрываем цепь обмотки возбуждения: она оказывается при этом замкнутой через реостат на обмотку якоря. Вследствие этого электродвижущая сила самоиндукции не может достигнуть значительной величины, и следовательно, опасность пробоя изоляции обмотки возбуждения устраняется.
Если соединить проводником л контактную планку с первым рабочим контактом, то при переводе рукоятки реостата на холостой контакт мы не разрываем цепь обмотки возбуждения: она оказывается при этом замкнутой через реостат на обмотку якоря. Вследствие этого электродвижущая сила самоиндукции не может достигнуть значительной величины, и следовательно, опасность пробоя изоляции обмотки возбуждения устраняется.
Очень часто при остановке двигателя размыкают сначала рубильник, а затем уже переводят рукоятку реостата на холостой контакт.
Рис. 4. Реостатный пуск для асинхронных двигателей с фазным ротором
При любом из этих двух способов рукоятка пускового реостата после остановки двигателя обязательно должна оставаться на холостом контакте для того, чтобы при новом пуске двигателя в ход не могло быть произведено ошибочного включения его в сеть при выведенном из цепи якоря реостате. Существуют пусковые реостаты, снабженные автоматическим устройством, переводящим рукоятку на холостой контакт, когда двигатель останавливается или исчезает напряжение в сети.
Реостатный пуск у электродвигателей переменного тока применяется для асинхронных двигателей с фазным ротором (рис. 4). При пуске такого двигателя сначала замыкается рубильник, включающий в сеть обмотки статора, затем постепенно выводят сопротивление реостата. В конечном его положении обмотки ротора замыкаются накоротко, а электродвигатель развивает номинальное число оборотов.
Из выражений (73) и (74) видно, что скорость вращения двигателей смешанного возбуждения можно регулировать тремя способами, рассмотренными выше для электродвигателей параллельного возбуждения, а именно: регулированием подведенного напряжения, изменением сопротивления цепи якоря и изменением потока возбуждения. Первый способ применим лишь в системе Г—Д, когда электродвигатель питается от отдельного генератора. Наибольшее распространение на практике получил второй способ, позволяющий плавно и в достаточно широких пределах регулировать скорость вращения электродвигателей постоянного тока. Основной его недостаток — большие потери энергии в регулировочных реостатах, а также громоздкость и значительный вес последних. При данном способе регулирования уравнения скоростной и механической характеристик будут практически те же, что и для электродвигателей последовательного и параллельного возбуждения [см. уравнения (75) и (76)]. Уравнения показывают, что на величину скорости холостого хода n0= U / cФШОВ дополнительное сопротивление R в цепи якоря влияния не оказывает, поэтому все искусственные характеристики исходят из одной точки n0 на оси ординат (рис. Наиболее экономичным способом регулирования скорости вращения является третий способ — изменение потока возбуждения электродвигателя. Такое регулирование осуществляется введением в цепь параллельной обмотки возбуждения ШОВ регулировочного реостата РР (рис. 37, а). Очевидно, что при полностью выведенном реостате РР электродвигатель работает на естественной характеристике а (рис. 37, б). При введении же различных сопротивлений в цепь обмотки ШОВ величина магнитного потока возбуждения изменяется и соответственно меняется скорость вращения электродвигателя. Регулирование скорости данным способом возможно лишь только вверх от номинальной, так как искусственные характеристики, получаемые при введении различных сопротивлении в цепь параллельной обмотки возбуждения, располагаются выше естественной характеристики. Это является одним из существенных недостатков данного способа регулирования скорости. Если учесть, что введение дополнительного сопротивления в цепь параллельной обмотки возбуждения приводит к снижению полезного магнитного потока машины, а это, в свою очередь, влечет за собой снижение вращающего момента, развиваемого электродвигателем, то нетрудно понять, что данный способ регулирования скорости применим лишь в случаях малозагруженных электродвигателей, например, при подъеме или спуске легких грузов или грузозахватного приспособления. Приведенные на рис. 37, б характеристики, соответствующие рассматриваемому способу регулирования скорости, пересекают ось ординат в различных точках. Характеристики, приведенные на рис. 37, б, имеют сходящийся характер, т. е. по мере снижения магнитного потока жесткость характеристик электродвигателя уменьшается, что, как уже указывалось, объясняется влиянием реакции якоря при значительных нагрузках. Значительная индуктивность параллельной обмотки возбуждения приводит к тому, что переход с одной характеристики на другую при данном способе регулирования скорости происходит по так называемым динамическим характеристикам (см. пунктир на рис. 37, б), которые можно построить после расчета переходных процессов. |
 В этом случае, изменяя ток возбуждения генератора, можно добиться изменения его напряжения, что приводит [см. уравнения (71) — (74)] к изменению числа оборотов электродвигателя.
В этом случае, изменяя ток возбуждения генератора, можно добиться изменения его напряжения, что приводит [см. уравнения (71) — (74)] к изменению числа оборотов электродвигателя. 36). Мягкость их определяется величиной сопротивления, включаемого в цепь якоря. Чем больше величина сопротивления R, тем значительней падение напряжения в якорной цепи и тем мягче искусственная характеристика. При переключении сопротивлений переход с одной характеристики на другую происходит так, как описывалось выше.
36). Мягкость их определяется величиной сопротивления, включаемого в цепь якоря. Чем больше величина сопротивления R, тем значительней падение напряжения в якорной цепи и тем мягче искусственная характеристика. При переключении сопротивлений переход с одной характеристики на другую происходит так, как описывалось выше.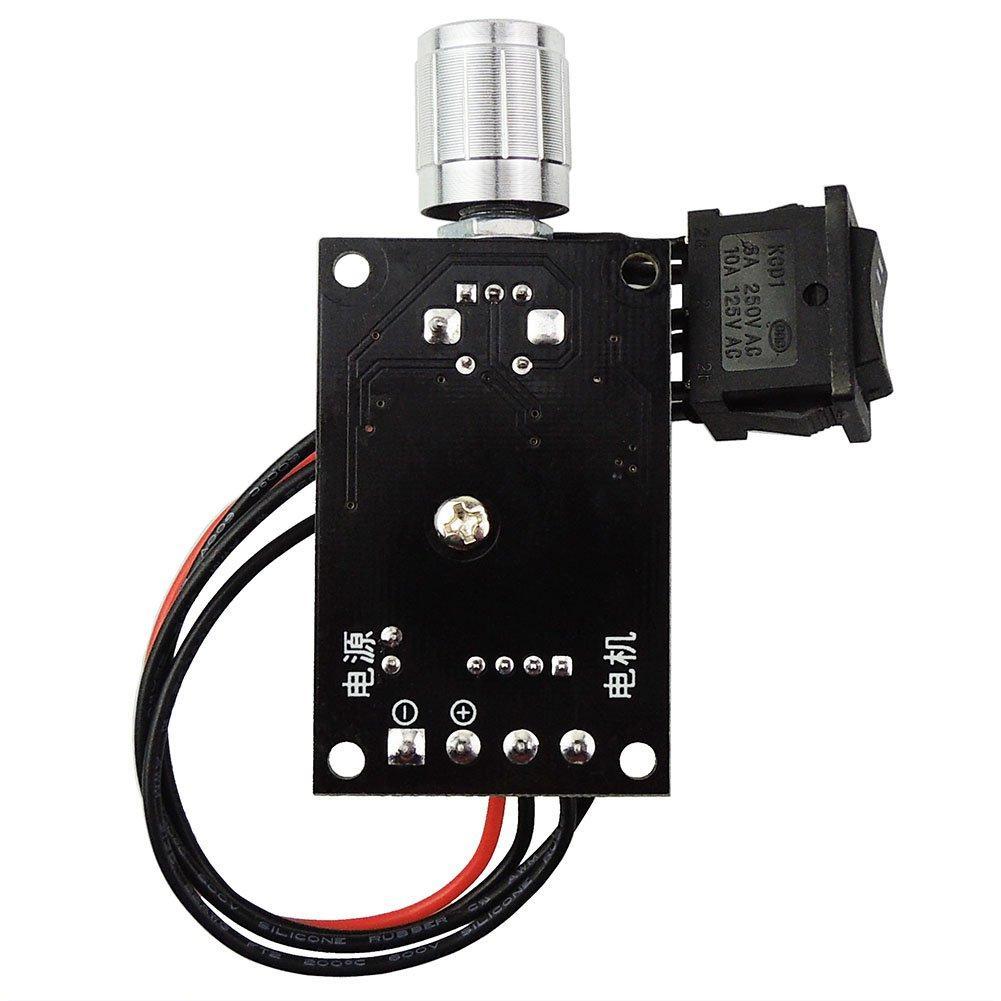
 Это объясняется тем, что при введении дополнительных сопротивлений в цепь обмотки возбуждения скорость холостого хода не остается постоянной. Она тем выше, чем больше величина сопротивления в цепи обмотки возбуждения [см. формулу (75)].
Это объясняется тем, что при введении дополнительных сопротивлений в цепь обмотки возбуждения скорость холостого хода не остается постоянной. Она тем выше, чем больше величина сопротивления в цепи обмотки возбуждения [см. формулу (75)].Электролитические конденсаторы для этой схемы надо брать на рабочее напряжение не менее 450В. С более низким не подойдут. С более низким не подойдут.И еще: при любом соединении обмоток электродвигателя, кроме пусковых электролитических конденсаторов, желательно добавить рабочие фазосдвигающие конденсаторы типа МБГЧ, МБГП на рабочее напряжение 400…600В, хотя бы и емкостью в 3…4 раза менее расчетной. Это значительно улучшит работу двигателя при переменных нагрузках (деревообрабатывающий станок, точило, корнерезка и т.п.). Напомним, что расчетная емкость выбирается из условия Сраб=(1,5…2)*66*Рном (читайте схему к рис.2). Теперь немного практики. Предположим, у вас двигатель мощностью 300Вт и его выводы соединены «треугольником» (рис.6). Такой двигатель без нагрузки успешно запустится и от одного правильно подобранного конденсатора в 40мкФ, включенного в цепь двигателя. А вот если его заменить диодно-конденсаторной сборкой (рис.4), то понадобится уже их уже четыре, т.е. если ориентироваться по рис.4, то каждый из двух нарисованных конденсаторов должен состоять состоять из последовательно соединенных двух электролитических конденсаторов по 40мкФ.  Понятно, что рабочее напряжение их желательно чтобы превышало хоть немного сетевое. Поэтому, если он у вас запускается без проблем и од одного конденсатора, то в диодной сборке нет смысла. А вот, если его мощность превышает 1…1,5кВт, или он тяжело разгоняется, то нужно использовать диодно-конденсаторную сборку. Понятно, что рабочее напряжение их желательно чтобы превышало хоть немного сетевое. Поэтому, если он у вас запускается без проблем и од одного конденсатора, то в диодной сборке нет смысла. А вот, если его мощность превышает 1…1,5кВт, или он тяжело разгоняется, то нужно использовать диодно-конденсаторную сборку.Также диодно-конденсаторную сборку целесообразно использовать при соединении обмоток двигателя по схеме «разорванная звезда» (рис.7). Эта схема дает наибольший крутящий момент при запуске двигателя даже с нагрузкой на валу. Электролитические конденсаторы в этой схеме лучше взять с напряжением не менее 450В и собрать согласно схемы рис.7. Рабочий фазосдвигающий конденсатор берется по формуле Ср=66*Рном, т.е. при 1кВт подойдет 60мкФ. Это могут быть бумажные типа МБГП на напряжение 600В. Пусковая электролитическая сборка рассчитывается как (2…3)*Ср, т.е. это в пределах 120…180мкФ. * с использованием материала статьи Ю.А.Сытник «Использование сборки конденсаторов для запуска электродвигателя» Схемы торможения 3-х фазных асинхронных двигателейДанное устройство торможения имеет авторское свидетельство СССР №1295495 кл. На рис.9 и рис.10 представлена еще одна схема торможения асинхронного 3-х фазного двигателя. Эта схема обеспечивает торможение любого двигателя до 3кВт в течение 6 секунд. Эту схему мы лично составили и испытывали на производстве со всеми асинхронными 3-х фазными двигателями до 3кВт включительно. Сама схема включения в работу двигателя и его торможения проста и представлена на рис.10. В работу двигатель включается подачей питающего напряжения через контакты контактора К1. А вот схема подключения кнопочного поста управления режимами двигателя немного посложнее. | Устройство для динамического торможения конденсаторного электродвигателя Представленная схема устройства по авторскому свидетельству №1023598, КЛ. НО2р 3/24, 15.06.83 предназначена для динамического торможения асинхронного конденсаторного электродвигателя с короткозамкнутым ротором малой мощности, которое обеспечивает его автоматическое торможение при отключении от сети путем кратковременного протекания пульсирующего тока по его обмоткам. |
/F036M_(6-90V-15A)-02.JPG) Н 02 Р3/24, 1987.
Н 02 Р3/24, 1987. Тогда через обмоки статоров обоих двигателей потечет выпрямленный однополупериодный ток. В результате двигатели тормозятся, а эффективность этого торможения зависит от величины тока через обмотки статоров, который регулируется сопротивлением R. С его помощью устанавливается максимально допустимый ток, что, разумеется, повышает долговечность работы устройства. Режим торможения прекращается при выключении и размыкании контактов КМ1. Время торможения и выключения КМ1 надо согласовать. При окончании торможения контактор КМ1 не должен быть включен.
Тогда через обмоки статоров обоих двигателей потечет выпрямленный однополупериодный ток. В результате двигатели тормозятся, а эффективность этого торможения зависит от величины тока через обмотки статоров, который регулируется сопротивлением R. С его помощью устанавливается максимально допустимый ток, что, разумеется, повышает долговечность работы устройства. Режим торможения прекращается при выключении и размыкании контактов КМ1. Время торможения и выключения КМ1 надо согласовать. При окончании торможения контактор КМ1 не должен быть включен. Режим торможения осуществляется подачей однополупериодного выпрямленного диодом VD1 напряжения на статор двигателя. Причем одна фаза подается на одну обмотку, а другая на оставшиеся две, которые в режиме торможения соединяются между собою контактами К2.2 и К2.3 контактора К2. Одна из фаз не используется. Сразу, оговоримся, что, если две оставшиеся обмотки не объединить между собою контактами К2.2 и К2.3, а подать вторую фазу только на одну обмотку — торможения не получится. Поэтому для 3-х фазных двигателей там, где общая точка соединения трех обмоток не доступна по конструктивным причинам их намотки, т.е. не выведена наружу, необходимо соединить в режиме торможения две обмотки. А вот на тех двигателях, где общая точка выведена наружу и доступна для монтажа, рекомендуется выпрямленное напряжение подать на две любые обмотки, а третью закоротить контактом контактора К2. Такое решение показано на рис.11.
Режим торможения осуществляется подачей однополупериодного выпрямленного диодом VD1 напряжения на статор двигателя. Причем одна фаза подается на одну обмотку, а другая на оставшиеся две, которые в режиме торможения соединяются между собою контактами К2.2 и К2.3 контактора К2. Одна из фаз не используется. Сразу, оговоримся, что, если две оставшиеся обмотки не объединить между собою контактами К2.2 и К2.3, а подать вторую фазу только на одну обмотку — торможения не получится. Поэтому для 3-х фазных двигателей там, где общая точка соединения трех обмоток не доступна по конструктивным причинам их намотки, т.е. не выведена наружу, необходимо соединить в режиме торможения две обмотки. А вот на тех двигателях, где общая точка выведена наружу и доступна для монтажа, рекомендуется выпрямленное напряжение подать на две любые обмотки, а третью закоротить контактом контактора К2. Такое решение показано на рис.11. Здесь выполнена защита от возможности включения сразу двух режимов во избежании неприятных последствий. Рассмотрим поконкретнее. Схема управления пусковой катушкой К1 почти стандартная за исключением «врезанного» в цепь ее управления нормально замкнутого контакта К2.4 от катушки торможения К2. Он защищает двигатель от включения пускового режима, пока идет процесс торможения и катушка К2 включена. Пока она будет включена, контакт К2.4 будет разомкнут вместе со стоповой кнопкой SB1. Но начнем по порядку.
Здесь выполнена защита от возможности включения сразу двух режимов во избежании неприятных последствий. Рассмотрим поконкретнее. Схема управления пусковой катушкой К1 почти стандартная за исключением «врезанного» в цепь ее управления нормально замкнутого контакта К2.4 от катушки торможения К2. Он защищает двигатель от включения пускового режима, пока идет процесс торможения и катушка К2 включена. Пока она будет включена, контакт К2.4 будет разомкнут вместе со стоповой кнопкой SB1. Но начнем по порядку. Второй конец катушки запитан, разумеется, напрямую. Как только катушка К1 встанет под ток, ее контакт К1.4 «обойдет», т.е. зашунтирует пусковую кнопку SB2 и ее отпускание уже никак не влияет на процесс — двигатель запущен и получает питание 3-х фазной сети через силовые контакты К1.1, К1.2 и К1.3 контактора К1. При этом цепь питания тормозного контактора К2 разорвана НО контактом SB1.2 кнопки «СТОП» и разомкнувшимся контактом К1.5 вставшей под ток пусковой катушки К1.
Второй конец катушки запитан, разумеется, напрямую. Как только катушка К1 встанет под ток, ее контакт К1.4 «обойдет», т.е. зашунтирует пусковую кнопку SB2 и ее отпускание уже никак не влияет на процесс — двигатель запущен и получает питание 3-х фазной сети через силовые контакты К1.1, К1.2 и К1.3 контактора К1. При этом цепь питания тормозного контактора К2 разорвана НО контактом SB1.2 кнопки «СТОП» и разомкнувшимся контактом К1.5 вставшей под ток пусковой катушки К1. 1, К1.2 и К1.3 контактора К1 (например, их залипании).
1, К1.2 и К1.3 контактора К1 (например, их залипании).  Конденсатор шунтирован резистором R через контакты 3-4 переключателя SA1, которые соединены последовательно с резистором R. Точка соединения фазосдвигающего конденсатора С1 и вспомогательной обмотки В соединена с выводом 2 переключателя SA1.
Конденсатор шунтирован резистором R через контакты 3-4 переключателя SA1, которые соединены последовательно с резистором R. Точка соединения фазосдвигающего конденсатора С1 и вспомогательной обмотки В соединена с выводом 2 переключателя SA1. По окончании заряда конденсатора С2 диод VD1 запирается им, в результате чего ток по обмотка Г и В прекращается. Повторный запуск двигателя вызывает разряд конденсатора С2 на резистор R через замкнутые контакты 3-4 переключателя SA1, и схема готова к новомй циклу торможения.
По окончании заряда конденсатора С2 диод VD1 запирается им, в результате чего ток по обмотка Г и В прекращается. Повторный запуск двигателя вызывает разряд конденсатора С2 на резистор R через замкнутые контакты 3-4 переключателя SA1, и схема готова к новомй циклу торможения. Емкость его определяют экспериментально для получения требуемого времени торможения. Разрядный резистор типа МЛТ-2 сопротивлением 150…200кОм.
Емкость его определяют экспериментально для получения требуемого времени торможения. Разрядный резистор типа МЛТ-2 сопротивлением 150…200кОм.Почему нельзя регулировать скорость вращения вентилятора диммером
Для регулирования скорости вращения однофазных электродвигателей на напряжение питания 220 В применяются симисторные регуляторы скорости вращения.
Диммер (симисторный светорегулятор), в свою очередь, разработан для управления резистивной нагрузкой и должен применяется только как регулятор яркости свечения ламп.
В паспортах и руководствах по эксплуатации обычно есть указание на недопустимость использования диммера для управления двигателем.
Например, в описании диммера 300W фирмы Eljo (Швеция) указано: индуктивная и емкостная нагрузка (обычные трансформаторы, флуоресцентные лампы и электродвигатели) не могут работать с данными диммерами.
Различия в схемах управления:
В диммерах и симисторных регуляторах скорости применены близкие схемы управления. Обе используют принцип фазового управления, когда изменяется момент включения симистора относительно перехода сетевого напряжения через ноль. Для простоты обычно говорят, что изменяется выходное напряжение.
Схема симисторного регулятора отличается от схемы диммера в следующем:
· Установлен нижний порог напряжения подаваемого на двигатель вентилятора
· Мощность симистора выбирается так, чтобы его максимальный рабочий ток превышал рабочий ток вентилятора не менее, чем в 4 раза. При резистивной нагрузке в 2 А достаточно взять симистор также на 2 А.
· Предохранитель подбирается исходя из мощности электродвигателя. Обычно максимальный ток предохранителя должен быть на 20% больше рабочего тока двигателя.
· Для более правильного формирования синусоиды установлен дополнительный фазосдвигающий демпфирующий конденсатор.
· Для уменьшения сетевых помех используется дополнительный конденсатор помехоподавления
Для чего это необходимо:
1. Вращающий момент асинхронного двигателя падает пропорционально квадрату подаваемого напряжения. При достижении нижнего порога по напряжению двигатель может не запуститься. Для однофазных осевых и канальных вентиляторов нижним значением являются 40-60 В.
Ввиду того, что двигатель не вращаясь, все равно потребляет ток, обмотки вентилятора начинают нагреваться. Двигатель начинает издавать характерный звук (гудеть). В результате, если двигатель не оснащен надежной внутренней термозащитой, перегорает в течение часа.
В симисторных регуляторах, минимальное напряжение, подаваемое на вентилятор, устанавливается на заводе-изготовителе. Обычно это 80-100 В. Это гарантирует нормальную работу вентилятора при низких напряжениях.
2. При запуске двигатель кратковременно потребляет ток, в 6-7 раз больше максимального рабочего (пусковой ток). Для надежной работы при пуске двигателя применяется симистор с большим рабочим током.
Для надежной работы при пуске двигателя применяется симистор с большим рабочим током.
3. Для правильной защиты двигателя от перегрузки по току (повышенное напряжение сети, перегрев подшипников и т.п.) величина максимального тока предохранителя должна быть подобрана по типу двигателя. Для симисторных регуляторов это значение на 15-20% выше максимального тока двигателя.
4. При подаче уменьшенного напряжения мощность двигателя падает и ротор начинает проскальзывать относительно поля статора. При определенных оборотах происходит фазовый сдвиг и двигатель начинает кратковременно потреблять ток выше, чем максимальный рабочий. Для недопущения такой ситуации в схему симисторного регулятора устанавливается дополнительный демпфирующий конденсатор и более мощный симистор.
5. Форма синусоиды при фазовом регулировании индуктивной нагрузки более сложна, чем при управлении активной нагрузкой, поэтому необходим дополнительный конденсатор подавляющий высокочастотный спектр помех. Диммер, управляющий вентилятором, может создавать помехи видимые на экране компьютера или телевизора.
Ключевые слова: регуляторы частоты вращения вентилятора
Регулировка скорости вращения асинхронного электродвигателя 220в. Регулировка оборотов асинхронного двигателя
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – . А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи.
При этом сохранится самое главное – мощность устройства.
 При этом сохранится самое главное – мощность устройства.
При этом сохранится самое главное – мощность устройства.Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением (для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки. В двигателях бытовых устройств таких приспособлений нет.
Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью .
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного . Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования , мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты : выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
 При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.

Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.

Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.

Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. в однофазную сеть 220В.
Данный регулятор оборотов электродвигателя 220в позволяет изменять частоту либо электродвигателя, рассчитанных на работу от сети 220 вольт.
Достаточно популярным регулятором оборотов для электродвигателей на 220 вольт переменного тока является схема на тиристорах. Типовой схемой является подключение электродвигателя или вентилятора в разрыв анодной цепи тиристора.
Одно не маловажное условие при использовании подобных регуляторов, это надежный контакт во всей цепи. Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи. Это существенно влияет на качество работы регулятора.
Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи. Это существенно влияет на качество работы регулятора.
Описание работы схемы регулятора оборотов
Приведенная ниже схема тиристорного регулятора оборотов , как раз разработана для изменения частоты вращения коллекторных электродвигателей (электродрель, фрезер, вентилятор ). Первое, что следует отметить, это то, что двигатель вместе с силовым тиристором VS2 подсоединен в одну из диагоналей диодного моста VD3, на другую же подается сетевое напряжение 220 вольт .
Помимо этого, данный тиристор контролируется достаточно широкими импульсами, благодаря которым, непродолжительные отключения активной нагрузки, которыми характеризуется работа коллекторного двигателя, не влияют на устойчивую работу данной схемы.
Для управления тиристором VS1 на транзисторе VT1, собран генератор импульсов. Питание данного генератор осуществляется трапециевидным напряжением, создающимся в результате ограничения положительных полуволн стабилитроном VD1 имеющих частоту 100 Гц. Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
При достижении на конденсаторе напряжения достаточного для открывания транзистора VT1, на управляющий вывод VS1 поступает положительный импульс. Тиристор открывается и теперь уже на управляющем выводе VS2 появляется длительный импульс управления. И уже с данного тиристора напряжение, которое фактически и влияет на величину оборотов, подается на двигатель.
Частоту оборотов вращения электродвигателя регулируют резистором R1. Так как в цепь VS2 подключена индуктивная нагрузка, то возможно спонтанное отпирание тиристора, даже при отсутствии управляющего сигнала. Поэтому для предотвращения данного нежелательного эффекта, в схему добавлен диод VD2 который подключается параллельно обмотке возбуждения L1 электродвигателя.
Детали регулятора оборотов вентилятора и электродвигателя
Стабилитрон – можно заменить на другой с напряжением стабилизации в районе 27 – 36В. Тиристоры VS1 – любой маломощный с прямым напряжением более 100 вольт, VS2 — возможно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 – с обратным напряжением не меньше 400 вольт и прямым током более 0,3А. Конденсатор C1 – КМ-6.
Тиристоры VS1 – любой маломощный с прямым напряжением более 100 вольт, VS2 — возможно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 – с обратным напряжением не меньше 400 вольт и прямым током более 0,3А. Конденсатор C1 – КМ-6.
Настройка регулятора оборотов
Во время наладки схемы регулятора желательно применить стробоскоп, который позволяет либо стрелочный вольтметр для переменного тока, который подсоединяют параллельно двигателю.
Вращая ручку резистора R1, определяют диапазон изменения напряжения. Путем подбора сопротивления R3 устанавливают данный диапазон в районе от 90 до 220 вольт. В том случае если при минимальных оборотах двигатель вентилятора работает неустойчиво, то необходимо немного уменьшить сопротивление R2.
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор –регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления. Это позволяет регулировать обороты в нужную величину.
Область примененияРегулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводы оборудования;
- сварочный аппарат;
- электрические печи;
- пылесосы;
- швейные машинки;
- стиральные машины.
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Схема контроллера оборотов вращения двигателя 12 в изображена на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
При пуске трехфазного двигателя на всю мощность, передаётся ток, действие повторяется около 7 раз. Сила тока сгибает обмотки двигателя, образуется тепло, на протяжении долгого времени. Преобразователь представляет собой инвертор, обеспечивающий превращение энергии. Напряжение поступает в регулятор, где происходит выпрямления 220 вольт с помощью диода, расположенного на входе. Затем происходит фильтрация тока посредством 2 конденсатора. Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Существует универсальный прибор 12в для бесколлекторных двигателей.
Схема состоит из двух частей–логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Виды устройств Прибор триакУстройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключахРаспространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналовСигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Схема регулятора, с помощью которой осуществляется изменение частоту оборотов вращения двигателя или вентилятора, рассчитана на работу от сети переменного тока на напряжение 220 вольт.
Двигатель вместе с силовым тиристором VS2 подключен в диагональ диодного моста VD3, на другую же поступает сетевое напряжение переменного тока 220 вольт. Кроме того, этот тиристор осуществляет контроль достаточно широкими импульсами, благодаря чему, непродолжительные обрывы цепи, с которыми работают все коллекторные двигатели, не влияют на устойчивую работу схемы.
Управляет первым тиристором транзистор VT1, подключенный по схеме генератора импульсов. Как только напряжение на конденсаторе станет достаточным для открытия первого транзистора, на управляющий вывод тиристора поступит положительный импульс. Тиристор откроется и теперь уже на втором тиристоре появится длительный управляющий импульс. И уже с него напряжение, которое фактически и влияет на величину оборотов, поступает на двигатель.
Частоту оборотов вращения электродвигателя подстраивают переменным сопротивлением R1. Так как в цепь второго тиристора подсоединена индуктивная нагрузка, то возможно спонтанное открывание тиристора, даже в момент отсутствии управляющего сигнала. Поэтому для блокировки этого, в схему включен диод VD2 который подсоединен параллельно обмотке L1 двигателя.
Во время настройки схемы регулятора оборотов двигателя желательно использовать , которым можно измерить частоту вращения электродвигателя либо обычный стрелочный вольтметр для переменного тока, который подключают параллельно двигателю.
С помощью подбора сопротивления R3 задают диапазон изменения напряжения от 90 до 220 вольт. Если при минимальных оборотах двигатель работает некорректно, то требуется уменьшить номинал резистора R2.
Эта схема хорошо подходит для регулировки скорости вращения вентилятора в зависимости от температуры.
В роли чувствительного элемента используется . В результате его нагревания уменьшается его сопротивление, и поэтому на выходе операционного усилителя, наоборот напряжение увеличивается и через полевой транзистор управляет оборотами вентилятора.
Переменным сопротивлением P1 — можно задать наименьшую скорость вращения вентилятора при наименьшей температуре, а переменным сопротивлением P2 регулируют наибольшую скорость вращения при максимальной температуре.
В нормальных условиях настраиваем резистором P1 минимальные обороты двигателя. Затем нагревают датчик и сопротивлением P2 адают нужную частоту вращения вентилятора.
Схема управляет скоростью вентилятора в зависимости от показаний температур, с помощью обычного с отрицательным температурным коэффициентом.
Схема настолько проста, что в ней присутствует только три радиокомпонента: регулируемый стабилизатор напряжения LM317T и два сопротивления, образующие делитель напряжения. Одно из сопротивлений — термистор с отрицательным ТКС, а другое — обычный резистор. Для упрощения сборки рисунок печатной платы привожу ниже.
В целях экономии, можно оснастить регулятором оборотов типовую болгарку. Такой регулятор для шлифования корпусов различной радиоэлектронной аппаратуры является незаменимым инструментом в арсенале радиолюбителя
Все современные дрели выпускают с встроенными в них регуляторами числа оборотов двигателя, но наверняка, в арсенале каждого радиолюбителя имеется старая советская дрель, у которых изменение числа оборотов не было задумано, что, резко снижает эксплуатационные характеристики.
Регулировать скорость вращения асинхронного безколлекторного двигателя можно с помощью настройки частоты питающего переменного напряжения. Данная схема позволяет регулировать скорость вращения в довольно широком диапазоне — от 1000 до 4000 оборотов в минуту.
ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА, ВКЛЮЧЕННЫЙ В СТАТОРНУЮ ЧАСТЬ АСИНХРОННОГО ДВИГАТЕЛЯ
Боихонов Заилобиддин Уразали оглы1, Узаков Рахмонжон1
1Андижанский машиностроительный институт
Библиографическая ссылка на статью:
Боихонов З.У.о., Узаков Р. Тиристорный электропривод переменного тока, включенный в статорную часть асинхронного двигателя // Современные научные исследования и инновации. 2020. № 5 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2020/05/92669 (дата обращения: 05.10.2021).
Основной задачей современного производства является обеспечение роста научно-технического прогресса. Основным условием его выполнения непрерывное усовершенствование технологий, систем и средств управления технологического оборудования и технологического процесса.
Известно, в наши дни микроэлектроника являясь основным фактором научно-технического роста, гарантирует экономического подъёма общества.
В наши дни все существующие направления технического развития в текстильной и легкой промышленности, основанные на применении современных микропроцессоров и средств автоматики направлены на улучшение эффективности труда и качества продукции.
Необходимо подчеркнуть, что оборудование агрегатов машин и механизмов, входящих в состав производственной системы текстильных и прядильных фабрик современными средствами управления и регулирования полностью отвечает современным требованиям.
Для этой цели вместо двигателя постоянного тока устанавливается простой по конструкции, дешевый по себестоимости, расход дефицитных металлов 1,5 ÷ 2 раза меньше (в сравнении с двигателем постоянного тока), с простой системой управления асинхронный электродвигатель переменного тока, работающий надёжно и достаточно удовлетворяющий рабочих характеристик. Асинхронные электродвигатели широко применяются во многих отраслях производства. Скорость вращения асинхронного двигателя регулируется просто, управляется индукционным реостатом новой конструкции.
По приведенной формуле асинхронного двигателя с фазным ротором его механическая характеристика выражается в различных значениях.
Здесь общее сопротивление находится по следующему выражению
Тиристорно управляемое устройство включается в статорную часть асинхронного двигателя, с помощью изменения напряжения, изменения сопротивления индукционного реостата и изменения емкости конденсатора изменяется механическая характеристика асинхронного двигателя с фазным ротором.
Скорость вращения асинхронного двигателя регулируется простым индукционным реостатом новой конструкции.
Для изменения скорости вращения двигателя изменяется образуемый магнитный поток в намагничивающей обмотке, т.е. появляется магнитный поток, связанный подаваемой силой тока на эту обмотку.
Этот магнитный поток, по направлению противоположен магнитному потоку, создаваемому обмоткой высокой мощности и алгебраически вычитается. В результате связанный значению направленного магнитного потока активное и реактивное сопротивления индукционного реостата. Это изменение в свою очередь приводит к изменению скорости вращения двигателя. Если коэффициент скольжения равняется S=1, то количество электрических параметров энергии, потребляемой индукционным реостатом равняется нулю. Изменением активно-индуктивного сопротивления индукционного реостата и сохранением некоторого сопротивления производится изменением значения напряжения, подаваемого на обмотку статора и увеличения (или уменьшения) количества конденсаторов.
Кроме этого принцип работы электропривода с асинхронным двигателем и с индукционным реостатом основан на количестве вращения и производится за счёт изменения сопротивления индукционного реостата. В результате ограничения тока ротора приводит к изменению скорости вращения двигателя. Регулирование скорости электропривода дает возможность повышения производительность шлихтовальной машины.
В частотно-управляемом асинхронном электроприводе на основании изменение частоты переменного тока на обмотке статора регулируется скорость вращения электродвигателя. В конце концов составляется система управления электродвигателем, приводящий энергосбережению.
Сведения, полученные результатами научных исследований показывают, что использование тиристорного электропривода переменного тока дает возможность уменьшению дерганий в электродвигателях и возможность мягкого пуска.
Библиографический список
- М. П. Белов, В. А. Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г.
- Абрамов А.Г. Размерный ряд индукционных автоматических реостатов для электродвигателей с фазным ротором. Электричество №12 сраница 46-49 1965 год
- Шмелев А.Н. Шишло К.С. Электрооборудование промишленных предприятий текстильного производства М. Легкая индустрия. 1975 год
- Башарин А.Б, Новиков В.А., Соколовский Г.Г. Управление электроприводами Л. Энергия 1982 гор
Количество просмотров публикации: Please wait
Все статьи автора «Режабов Зайлобиддин Маматович»
Улучшенная простая схема регулятора оборотов, скорости вращения компьютерного вентилятора, кулера.
Данная схема регулятора оборотов обычного компьютерного вентилятора, кулера является улучшенной в сравнении со схемой самого простого варианта, а именно содержащая всего один транзистор и один переменный резистор.
Простая схема подключается последовательно в цепь, то есть в разрыв между питанием и самим вентилятором. И при таком подключении регулирует только силу тока в цепи, путем увеличения или уменьшения проводимости коллектор-эмиттерного перехода. А дело в том, что при регулировки скорости вращения у постоянного двигателя величиной тока возникают некоторые проблемы. А именно, это плохая линейность самой регулировки. А также, чем меньше ток, тем хуже вращающий момент.
В улучшенной же схеме регулировка частоты вращения вентилятора осуществляется путем изменения величины подаваемого постоянного напряжения. При этом способе линейность изменения и крутящий момент будут выше, то есть лучше.
Давайте вкратце рассмотрим саму схему и принцип ее работы. Итак, первая часть регулятора представлена простым параметрическим стабилизатором напряжения. Он состоит из управляемого стабилитрона типа TL431. Этот стабилитрон может обеспечить стабильное напряжение в диапазоне от 2,5 до 36 вольт. При максимальном токе до 100 мА. Для управления этим стабилитроном в схеме стоит переменный (или подстроечный) резистор R2 на 22к. именно подбирая нужное положение ползунка резистора мы выбираем необходимое напряжение стабилизации между анодом и катодом на стабилитроне. Если использовать схему для питания вентилятора на 12 вольт, то стабилитрон должен иметь напряжение стабилизации около 12,6 вольт. То есть, 12 вольт для самого вентилятора и 0,6 вольт для управляющего транзисторного перехода база-эмиттер, которые на нем осядут.
Если мы будем подавать на вход схемы напряжение более 12,5 вольт, то нужно последовательно стабилитрону добавить токоограничительный резистор R1. Это нужно, чтобы не перегружать стабилитрон повышенным током, что будет протекать через его катод и анод. Для нормальной работы стабилитрона будет вполне достаточно использовать силу тока около 5 мА. Именно резистором R1 мы сможем ограничить этот ток. Его номинал нужно подобрать в диапазоне где-то от 1 до 470 Ом.
Итак, мы на нашем стабилитроне имеет стабильное постоянное напряжение около 12,6 вольт. А поскольку параллельно катоду и аноду стабилитрона подключен еще один переменный резистор R3, то это напряжение оседает и на нем. Он выполняет регулируемого делителя напряжения. То есть, когда мы крутим этот резистор, то между минусом и выводом ползунка будет меняться величина напряжения. Чем ближе ползунок к минусу, тем меньше будет напряжение. Это изменяемое напряжение и подается на база-эмиттерный переход биполярного транзистора VT1. Этот транзистор включен по схеме с общим коллектором. А такой тип подключения транзистора имеет усиление только по току, по напряжению усиления нет. Даже оно чуть меньше того, которое прилаживается на база-эмиттерный переход. И меньше именно на 0,6 вольт.
То есть, на выходе схемы, а именно на резисторе R4, мы имеем регулируемое напряжение, что задается переменным резистором R3. С вычитанием 0,6 вольт. Но при этом у нас будет достаточно большим сила тока, которая будет протекать через наш вентилятор. Таким образом мы получим регулировку именно напряжения. Выше я сказал, что управление током имеет значительные недостатки. Управление скоростью вращения вентилятора именно величиной постоянного напряжения будет иметь лучшую линейность и крутящий момент. Так что лучше использовать такой вариант схемы регулировки оборотов электродвигателя. Хотя существует и еще более лучший вариант, а именно регулировка ШИМ. Но о ней будет рассказано в другой статье.
К сожалению, как самая простая схема регулятора (изменяем силу тока), так и эта схема (регулировка напряжением) имеют один существенный общий недостаток. А именно, у них плохая экономичность расходуемой электроэнергии. Дело в том, что когда мы производим уменьшение оборотов двигателя вентилятора, то лишнюю мощность мы просто отводим на выделение тепла на силовом транзисторе. То есть, транзистор выполняет роль обычного резистора, который электричество преобразует в тепло.И чем меньше скорость на вентиляторе, тем больше электричества расходуется в никуда. Ну, в зимний период это даже хорошо, дополнительный обогрев помещения, а вот летом, как-то не совсем. Хотя при небольших мощностях нагрузки этой экономностью можно и пренебречь.
Видео по этой теме:
P.S. Эту схему целесообразно использовать в тех случаях, когда нужно регулировать скорость вращения на электродвигателях относительно небольшой мощности. Ну, хотя бы до 10 Вт. Если вы не желаете чтобы электроэнергия тратилась впустую, то в очередной статье я приведу пример схемы, которая осуществляет управление оборотами кулера путем широтно-импульсной модуляции. В таком варианте недостатков еще меньше.
Как управлять скоростью электродвигателя переменного тока
Электродвигатель переменного тока — это электродвигатель, приводимый в действие переменным током (AC), и состоит из двух основных частей: внешнего статора с катушками, на которые подается переменный ток для создания вращающегося магнитного поля. и внутренний ротор, прикрепленный к выходному валу, создающий второе вращающееся магнитное поле. Возможность управлять скоростью двигателя имеет множество преимуществ, и в этом руководстве будут рассмотрены несколько способов управления скоростью двигателя.
Как отмечалось выше, управление скоростью электродвигателя переменного тока имеет ряд преимуществ, включая снижение слышимого шума, энергоэффективность и улучшенное управление приложением двигателя. Хотя они являются устройствами с постоянной скоростью, скорость двигателя переменного тока может изменяться при изменении частоты, входного напряжения или обмоток, которые заставляют двигатель вращаться.
Распространенным и эффективным средством изменения скорости двигателя является изменение частоты с использованием инвертора в качестве источника питания.Благодаря технологическому прогрессу и снижению стоимости силовых инверторов, это часто используемый и популярный вариант. Способы снижения напряжения на обмотках двигателя с помощью трансформаторов, резисторов или отводов обмоток двигателя также все еще используются.
Если вы планируете использовать инвертор для питания электродвигателя переменного тока, важно выбрать такой, который может обеспечивать не только напряжение двигателя и рабочий ток, но и пусковой ток. Используйте диапазон изменения скорости, необходимый для выбора диапазона частоты, которую инвертор должен обеспечивать.Элементы управления инвертора могут использоваться для изменения частоты, подаваемой на двигатель, и скорость двигателя будет соответственно изменяться.
Если полностью точное регулирование скорости не критично для двигателя, можно также добавить переменное сопротивление в цепь двигателя, чтобы снизить напряжение на основной обмотке. «Проскальзывание» двигателя — разница между синхронной скоростью магнитного поля электродвигателя и скоростью вращения вала — которая обычно близка к нулю, будет увеличиваться, поскольку на двигатель подается уменьшенная мощность.Кроме того, полюса двигателя не получают достаточной мощности для создания силы, необходимой для поддержания нормальной скорости, и в этом методе двигатель должен быть рассчитан на высокое скольжение.
Более эффективным вариантом является использование трансформатора переменного напряжения. Этот метод изменит напряжение, подаваемое на главную обмотку, что приведет к большому скольжению и уменьшению напряжения управления скоростью. Трансформатор переменного напряжения имеет низкие потери по сравнению с переменным резистором. Использование трансформатора может иметь серию ответвлений, которые изменяют соотношение напряжений для управления скоростью двигателя.Эти ответвления можно менять вручную, или трансформатор может иметь устройство переключения ответвлений с электроприводом. В любом случае скорость двигателя изменяется дискретно, и конкретная конструкция зависит от установки, в которой используется трансформатор.
Другой метод управления скоростью электродвигателя переменного тока — использование электродвигателя переменного тока с ответвленными обмотками для изменения скорости. Это метод, который чаще всего встречается в домашних вентиляторах с переключателями высокой, средней и низкой скорости. Эти двигатели имеют заданное количество ответвлений на основной обмотке, что позволяет им работать с различными напряжениями, приложенными к его магнитному полю.Количество ступеней и скоростей, доступных для двигателя, обычно не превышает четырех. Точная скорость в этих типах приложений не имеет решающего значения, и регулирование скорости с помощью этой опции очень экономично.
Частотно-регулируемый привод (VFD) — это еще один вариант, который представляет собой контроллер двигателя переменного тока, который управляет двигателем, изменяя подаваемую на него частоту и напряжение. Частота (или герц) напрямую связана со скоростью двигателя (об / мин), поэтому чем выше частота, тем выше частота вращения. Если приложение двигателя не требует, чтобы он работал на полной скорости, можно использовать частотно-регулируемый привод для уменьшения частоты и напряжения в соответствии с требованиями к нагрузке двигателя.Когда требования к скорости двигателя в приложении меняются, частотно-регулируемый привод будет эффективно уменьшать или увеличивать скорость двигателя, удовлетворяя требованиям к скорости. Использование частотно-регулируемого привода может обеспечить снижение энергопотребления и затрат, увеличение производства за счет более жесткого контроля процесса и продление срока службы оборудования при одновременном снижении требований к техническому обслуживанию.
Наконец, регулировка величины напряжения на клеммах двигателя с помощью широтно-импульсной модуляции (ШИМ) также может управлять скоростью двигателя. Как следует из этого термина, ШИМ-регулирование скорости работает путем управления двигателем с помощью быстрой серии импульсов «ВКЛ» и «ВЫКЛ» и изменения рабочего цикла.Мощность, подаваемая на двигатель, регулируется путем изменения ширины этих приложенных импульсов, что, в свою очередь, изменяет среднее напряжение, подаваемое на клеммы двигателя. Модулируя или изменяя синхронизацию этих импульсов, можно управлять скоростью двигателя. Таким образом, чем дольше импульс «включен», двигатель будет вращаться быстрее, и, наоборот, чем короче время, в течение которого импульс «включен», тем медленнее будет вращаться двигатель.
С помощью нескольких простых регулировок или изменений можно управлять скоростью электродвигателя переменного тока.Посетите Zoro.com, где представлен широкий спектр регуляторов скорости переменного тока от ведущих поставщиков.
Методы регулирования скорости различных типов двигателей с регулировкой скорости
Казуя ШИРАХАТА
Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулировкой скорости. Наши пакеты двигателей с регулировкой скорости включают двигатель, драйвер (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы продукции для двигателей с регулировкой скорости.«Блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсаторным приводом, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Блок инвертора», который объединяет трехфазный асинхронный двигатель с небольшой инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении, от домашнего оборудования до станков на промышленных предприятиях.Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Эти двигатели имеют самые разные функции и характеристики. Сосредоточив внимание на сегменте управления скоростью на рынке двигателей, серводвигатели и шаговые двигатели управляют своей скоростью с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и / или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Электродвигатель и редукторные электродвигатели переменного тока
- Бесщеточные двигатели постоянного тока и мотор-редукторы
- Инверторный блок
2. Методы регулирования скорости различных двигателей с регулировкой скорости
Метод управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис.1 Классификация двигателей с регулировкой скорости
2.1. Двигатели с регулировкой скорости переменного тока
2.1.1. Строительство Motor
Как показано на рис. 2, конструкция однофазного и трехфазного асинхронных двигателей включает статор, на котором намотана первичная обмотка, и цельный алюминиевый ротор в форме корзины, отлитый под давлением. Ротор недорогой, потому что конструкция проста и не использует магнит.Рис. 2 Конструкция асинхронного двигателя
Когда необходимо управлять скоростью этого двигателя, для определения скорости используется тахогенератор, который присоединяется к двигателю, как показано на рис.3. Тахогенератор состоит из магнита, подключенного непосредственно к валу двигателя, и катушки статора, которая определяет магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис.3 Система электродвигателя с регулировкой скорости переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя может быть выражена выражением (1).Когда напряжение, прикладываемое к двигателю, увеличивается и уменьшается, изменяется скольжение и , затем изменяется частота вращения N.
N = 120 · f · (1- s ) / P · · · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, показанного на рис. 4, на кривой «Скорость вращения — крутящий момент» существует стабильный диапазон и нестабильный диапазон.Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление разомкнутым контуром) ограничивается регулированием скорости в узком диапазоне, например N1 ~ N3 на рис. 5. Чтобы обеспечить надежную работу даже в вышеупомянутый нестабильный диапазон, необходимо определить скорость вращения двигателя и использовать механизм регулирования напряжения (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4 Частота вращения — характеристики крутящего момента асинхронных двигателей
Фиг.5 Простое управление напряжением
Доступные методы управления напряжением включают управление трансформатором или управление фазой. На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так-то просто сделать с двигателем, регулирующим скорость переменного тока. В качестве альтернативы, напряжение переменного тока можно регулировать, задав время включения / выключения каждого полупериода переменного напряжения (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на рис.7 и 8. Регулирование скорости достигается методом фазового регулирования путем регулирования среднеквадратичного значения. значение переменного напряжения.
Рис.6 Изменение напряжения трансформатором
Рис.7 Изменение напряжения с помощью фазового управления
Рис.8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить устойчивое управление скоростью за счет регулирования фазы с обратной связью даже в нестабильном диапазоне.
На рис. 9 показана конфигурация системы управления скоростью для электродвигателя управления скоростью переменного тока в виде блок-схемы.
Рис. 9 Блок-схема системы электродвигателя с регулировкой скорости переменного тока
Рис.10 Форма сигнала для каждого блока
На рис. 10 показаны формы сигналов каждого блока. Установленное значение d скорости и обнаруженное напряжение e скорости, генерируемое тахогенератором, сравниваются в блоке усилителя сравнения.Затем определяется уровень сигнала напряжения , .
Сигнал напряжения a является низким, когда обнаруженное значение скорости до заданного значения скорости увеличивается, и выше, когда заданное значение скорости уменьшается. Поскольку сигнал запуска выводится в точке, где треугольная волна b, пересекается с сигналом a, напряжения, определяется синхронизация (фазовый угол) при включении симистора с уровнем сигнала a напряжения. Когда это время является медленным, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается.Пониженная скорость вращения возвращается снова, и управление повторяется, так что разница между определенным значением скорости и установленным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид упомянутого выше регулятора скорости. На рис. 11 рабочая точка двигателя образует контур Q-R-S-T-Q с центром на O, и скорость вращения поддерживается между N1 и N2. Этот цикл максимально сокращен за счет повышения точности определения скорости.
Фиг.11 Работа регулятора скорости
Двигатель с регулировкой скорости переменного тока имеет следующие особенности при использовании этого регулирования фазы с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть настроена просто потому, что схема сглаживания не нужна, что позволяет получить компактную конструкцию по низкой цене.
2) Таким же образом возможна долговечная конструкция, поскольку нет необходимости в большом алюминиевом электролитическом конденсаторе.
3) Переключение выполняется только один раз в течение каждого полупериода промышленного источника питания переменного тока, что снижает уровень генерируемого шума.
2.1.3. Характеристики
Двигатели с регулировкой скорости вращения электродвигателя переменного тока обычно имеют характеристики «Скорость вращения — крутящий момент», показанные на рис. 12.
Рис.12 Характеристики крутящего момента и скорости вращения
«Строка безопасной эксплуатации» приведена на рис. 12. «Строка безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения его максимально допустимой температуры.
2.2. Бесщеточный регулятор скорости постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, катушка соединена звездой (Y-разводкой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов при каждом повороте ротор.
Рис.14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики вращательной скорости-момента бесщеточного двигателя постоянного тока показывают отрицательную наклонную характеристику, когда его скорость не контролируется, что аналогично характеристикам щеточного двигателя постоянного тока.
Рис. 15 Характеристики скорости вращения бесщеточного двигателя постоянного тока
Когда нагрузка не приложена и входное напряжение установлено на V2 на рисунке 15, рабочая точка двигателя становится P, а скорость вращения равна N1.Когда прикладывается крутящий момент T1 нагрузки, рабочая точка смещается на Q, а скорость вращения снижается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизму управления скоростью нужно будет только изменять входное напряжение всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Этот контроль напряжения реализуется инвертором в выходной части схемы управления (драйвер).Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как в последовательности, показанной на рисунке 16 (b), с использованием шести переключающих элементов (FET или IGBT), показанных на рисунке 16 (a).
Рис. 16 (a) Выходная часть схемы управления (драйвер)
Рис.16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на Рис. 16 (a), и состояние ВКЛ / ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется ИС Холла, и соответствующий переключающий элемент включается или выключается, как показано на Рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включаются, и ток течет из фазы U в фазу W. В это время U-фаза возбуждается как полюс N, а фаза W становится S-полюсом, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1 ~ 12).
Рис. 17 показывает конфигурацию для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис.17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от ИС Холла в части определения положения на блок-схеме, и двигатель вращается.
Затем сигнал от ИС холла отправляется на датчик скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом установки скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения.Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами и вторичные потери малы.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость реакции.
3) Можно уменьшить размер двигателя, потому что он очень эффективен.
4) Колебания скорости при изменении нагрузки незначительны.
Фиг.16 показана типичная последовательность переключения (метод подачи напряжения на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод возбуждения синусоидальной волны, получая информацию о положении ротора с высоким разрешением из программного обеспечения из сигнала IC Холла. Этот метод обеспечивает малошумный метод управления двигателем, поскольку ток, протекающий через двигатель, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, приложенных при использовании метода возбуждения синусоидальной волны и метода возбуждения 120 градусов
2.2.3. Характеристики
Характеристики скорости вращения и крутящего момента бесщеточного двигателя постоянного тока имеют ограниченную область нагрузки в дополнение к области непрерывной работы.
Ограниченная рабочая зона очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме работы продолжается в течение пяти секунд или более, срабатывает функция защиты водителя от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок управляет скоростью трехфазного асинхронного двигателя, изменяя частоту f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f, изменяя цикл включения / выключения шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120 · f · (1- s ) / P ·· · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл включения / выключения, как показано на рис.21. Время включения / выключения регулируется таким образом, что среднее напряжение, приложенное к двигателю, приобретает форму синусоиды, путем сравнения треугольной волны, называемой несущим сигналом, с формой сигнала синусоидальной формы. Этот метод называется ШИМ-управлением.
Рис.19 Дежурный контроль ВКЛ / ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление с обратной связью, которое просто изменяет скорость, и управление с обратной связью, которое уменьшает изменение скорости при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация управления без обратной связи в виде блок-схемы.
Рис.20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и позволяет получить высокие скорости (частоту можно установить до 80 Гц) просто тогда, когда регулирование скорости с изменяющейся нагрузкой не представляет особой важности.
Создаваемый крутящий момент T двигателя показан формулой (2).Исходя из этого соотношения, можно сказать, что крутящий момент также будет постоянным, если сделать постоянным V / f, отношение напряжения V к частоте f.
= K ・ I ・ V / f ・ ・ ・ (2)
T : Крутящий момент [Н · м]
V : Напряжение источника питания [В]
I : Ток двигателя [A]
f : Частота [Гц]
K : Постоянная
Однако чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f.Следовательно, чтобы получить постоянный крутящий момент от низкой скорости к высокой скорости, необходимо отрегулировать отношение V / f на низкой скорости в соответствии с характеристиками двигателя, как показано на рис. 23 сплошной линией.
Рис.21 V / f Control
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис.22 Блок-схема управления по замкнутому контуру
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, с использованием таблицы данных характеристик (рис.25), подготовленный заранее, и регулирует частоту инвертора без необходимости в датчике скорости на двигателе.
Рис.23 Таблица характеристик и данных
Используя эту таблицу характеристик и время t обнаруженной разности фаз, инвертор вычисляет выходную частоту инвертора, которая соответствует команде Nset скорости вращения, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления U / f вычисляет напряжение, приложенное к двигателю, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM.В результате при приложении нагрузки выходная частота инвертора увеличивается, так что уменьшение скорости вращения может быть компенсировано. (3)
2.3.2. Характеристика с
Характеристики скорости вращения-момента инверторного блока показаны на рис. 26 и 27. Как объяснено в разделе, посвященном двигателю, регулирующему скорость переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет предел для непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис.24 Характеристики скорости вращения и момента для управления без обратной связи
Рис.25 Характеристики скорости вращения и момента для замкнутого контура управления
3. Резюме
Oriental Motor предлагает три группы продуктов (двигатели с регулированием скорости переменного тока, бесщеточные двигатели с регулировкой скорости постоянного тока и инверторные блоки) для использования в широком диапазоне приложений регулирования скорости. Подходящий продукт для регулирования скорости можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, которые требуются для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, наилучшим образом отвечающую различным потребностям наших клиентов.
Список литературы
(1) Исследовательская группа по технологии двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998).
(2) Казуо Абэ: «Технология бесшумного привода бесщеточного двигателя», RENGA № 163, стр. 19-25 (2003)
(3) Кодзи Намихана, Масаёши Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA No.159, стр. 23-28 (1999)
| Кадзуя Сирахата Завод Цуруока, Операции ACIX Подразделение схемотехники Секция разработки схем |
Управление скоростью двигателей — Введение в частотно-регулируемые приводы
Скорость, крутящий момент и мощность — три взаимосвязанных параметра в управлении двигателем. Скорость двигателя, измеряемая в оборотах в минуту (об / мин), определяет способность двигателя вращаться со скоростью в единицу времени.Крутящий момент двигателя, измеряемый в фут-фунтах (фут-фунт), является характеристикой вращения двигателя, которая является алгебраическим произведением силы, умноженной на расстояние. Электрически одна лошадиная сила (л.с.) равна 746 Вт. Что интересно в этих параметрах двигателя, так это то, что если вы измените одну из трех переменных, это повлияет на две другие. Например, если вы увеличиваете мощность, сохраняя постоянную скорость, крутящий момент увеличивается.
Электродвигатель — это устройство, преобразующее электрическую энергию в механическую.Электрический сигнал подается на вход двигателя, и на выходе двигателя создается определенный крутящий момент, связанный с характеристиками двигателя. Важно понимать характеристические кривые скорость-крутящий момент, поскольку они показывают взаимосвязь между скоростью в процентах от номинальной скорости и крутящим моментом нагрузки в процентах от полной номинальной скорости. Двигатели доступны в многоскоростных конфигурациях, которые могут обеспечивать переменную мощность с постоянным крутящим моментом, переменную мощность с постоянным крутящим моментом и переменную мощность с переменным крутящим моментом.
Уравнение 1. Синхронная скорость
Традиционно двигатели постоянного тока использовались в приложениях точного управления скоростью из-за их способности довольно легко обеспечивать ускорение и замедление от положения полной остановки до полной скорости. В последовательном двигателе постоянного тока (поле последовательно с якорем) скорость регулируется путем увеличения или уменьшения приложенного напряжения к последовательному полю или якорю с помощью полевого реостата или реостата якоря. Выпрямители с кремниевым управлением (SCR) заменили реостаты, поскольку они могут управлять большими блоками мощности без проблем рассеивания тепла, связанных с угольными или проволочными переменными резисторами.Кроме того, SCR намного меньше по размеру, чем их более ранние аналоги, и хорошо взаимодействуют с программируемыми логическими контроллерами.
Асинхронный двигатель переменного тока с короткозамкнутым ротором — это, по сути, устройство с постоянной скоростью. Скорость вращающегося магнитного поля называется синхронной скоростью. Уравнение 1 связывает синхронную скорость (S) с частотой входящей линии (F) и числом полюсов (P), из которых построена машина: [S = 120 (F) ÷ P].
Вот пример, чтобы проиллюстрировать это.В США частота в линии составляет 60 Гц. Таким образом, четырехполюсный асинхронный двигатель переменного тока с короткозамкнутым ротором будет иметь синхронную скорость 1800 об / мин [(120 x 60) ÷ 4]. На практике двигатель будет работать со скоростью менее 1800 об / мин, так как нагрузка находится на роторе. Эта разница в скорости между синхронной скоростью и скоростью при полной нагрузке называется скольжением и обычно выражается в процентах. Обратите внимание, что единственными двумя переменными в уравнении 1, которые определяют скорость, являются частота входящей линии и количество полюсов в машине.Поскольку количество полюсов в машине фиксировано, единственная переменная, которую нужно изменить, — это частота входящей линии. Это основа для работы частотно-регулируемого привода (ЧРП).
На этом этапе важно понимать разницу между машиной переменного и постоянного тока. Ранее мы упоминали, что скорость машины постоянного тока может быть изменена путем увеличения или уменьшения приложенного напряжения. Это не относится к двигателю переменного тока. Фактически, вы можете повредить асинхронный двигатель переменного тока с короткозамкнутым ротором, если измените входное напряжение питания.
Термин частотно-регулируемый привод часто используется как взаимозаменяемый с приводом переменного тока, инвертором или преобразователем частоты (AFD). Двумя наиболее распространенными схемами для регулировки скорости асинхронного двигателя переменного тока с короткозамкнутым ротором являются инвертор и циклоконвертер.
ЧРП, использующий инвертор, выполняет две функции: во-первых, он принимает входящий сигнал переменного тока и преобразует его в сигнал постоянного тока посредством процесса, известного как выпрямление, а затем принимает выпрямленный сигнал постоянного тока и инвертирует его обратно в переменное напряжение и переменную. -частотный сигнал переменного тока.Инвертор принимает форму волны, подобную выпрямленному сигналу постоянного тока, и генерирует эквивалентную изменяющуюся во времени форму волны, напоминающую синусоиду. Блок-схема частотно-регулируемого привода инверторного типа показана на рисунке 1.
Рисунок 1. Блок-схема PWM VFD
ЧРП, использующий циклоконвертер, представляет собой устройство, которое выдает сигнал переменного тока постоянной или регулируемой частоты из входного сигнала переменного тока переменной частоты. Выходная частота обычно составляет одну треть или меньше входной частоты. ЧРП с циклоконвертером обычно используется с более крупными двигателями или группами двигателей одновременно.
Типичные технические характеристики частотно-регулируемого привода инверторного типа, с которыми вы можете столкнуться, перечислены ниже:
Мощность: 1–10 л.с. при 230 В
Входная частота: 50/60 Гц
Выходная частота: 0–120 Гц стандартная; Выбор перемычки 0–400 Гц
Потенциометр установки частоты: 10 кОм ½ Вт
Температура окружающей среды: 0 — + 40 ° C
Метод управления: ШИМ (широтно-импульсная модуляция)
Тип транзистора: IGBT (BJT с изолированным затвором)
Аналоговые выходы: назначаемые
Цифровые выходы: назначаемые оптоизолированные
Клеммные колодки, присутствующие на частотно-регулируемом приводе, позволяют устройству взаимодействовать с внешним миром со знакомыми коммутационными устройствами, такими как пуск, останов, движение вперед и назад.Вместо использования трехпроводной схемы управления для запуска и остановки двигателя с помощью устройств с мгновенным контактом, электроника привода управляет всеми этими знакомыми операциями.
Обычно ЧРП также имеет жидкокристаллический дисплей (ЖКД) с подсветкой, который показывает множество рабочих параметров двигателя, которые полностью программируются пользователем. Твердотельные устройства, такие как кремниевый управляемый выпрямитель, симистор и биполярный транзистор с изолированным затвором, позволили преобразователю частоты стать предпочтительным методом управления скоростью двигателя переменного тока.
Как управляются двигатели постоянного тока? — Контроль скорости двигателей постоянного тока
Электродвигателипостоянного тока питаются от постоянного тока. Они имеют широкий спектр применения в таких продуктах, как бытовая техника, автомобили и фабрики. Можно сказать, что они играют жизненно важную роль в нашей жизни.
Однако многие пользователи выражают неуверенность в том, как управлять скоростью двигателей постоянного тока. На этой странице представлено простое введение в то, как это делается.
Что такое двигатель постоянного тока?
Во-первых, электродвигатель — это машина, которая использует электричество для вращения вала, тем самым преобразуя электрическую энергию в механическую.Электродвигатели в общих чертах делятся на следующие три типа.
- Двигатели постоянного тока
- Двигатели переменного тока
- Шаговые двигатели
переменного тока приводятся в движение переменным током, а шаговые двигатели — импульсами электроэнергии. С другой стороны, двигатели постоянного тока питаются от постоянного тока и имеют следующие особенности.
- Высокий пусковой момент и возможность вращения на высоких скоростях
- Мощность двигателя пропорциональна приложенному напряжению
подразделяются на щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока.Щеточные двигатели постоянного тока имеют катушки в роторе и изменяют способ протекания тока через катушки на основе механизма, использующего коммутаторы и щетки. Щеточные двигатели постоянного тока генерируют электрический и акустический шум и требуют частого обслуживания, поскольку их щетки и коммутатор являются расходными частями. Но они также имеют простую конструкцию и могут работать без электронной схемы привода, если регулирование скорости не требуется.
Бесщеточный двигатель постоянного тока, напротив, избавляет от необходимости в коммутаторе и щетках за счет наличия постоянного магнита в роторе.Это, однако, означает, что они требуют схемы возбуждения. Они также отличаются низкими эксплуатационными расходами, бесшумной работой и длительным сроком службы.
Характеристики двигателей постоянного тока
В отличие от двигателей переменного тока, двигатели постоянного тока очень просты в использовании из-за легкости изменения их скорости. Итак, как этого добиться на практике? Следующее объяснение начинается с рассмотрения характеристик двигателя постоянного тока.
Характеристики двигателя постоянного тока представлены кривой крутящего момента-скорости, которая наклоняется вниз вправо, с крутящим моментом в качестве горизонтальной оси и скоростью в качестве вертикальной оси.Скорость максимальна при отсутствии нагрузки, она снижается вправо до достижения максимального крутящего момента при нулевой скорости.
Крутящий момент и скорость меняются в зависимости от нагрузки, как показано этой кривой крутящего момента-скорости. Глядя на график ниже, давайте рассмотрим двигатель, вращающийся со скоростью ω0 с крутящим моментом T0. Если крутящий момент нагрузки затем увеличивается до T1, скорость двигателя будет следовать за крутящим моментом до новой скорости ω1. Аналогично, если крутящий момент нагрузки затем увеличивается до T2, скорость падает до ω2.
Крутящий момент и скорость двигателя постоянного тока
Взгляд на соотношение между крутящим моментом и током показывает, что они пропорциональны друг другу.Отношение между ними является постоянным для двигателя, причем соотношение остается неизменным независимо от изменений скорости двигателя или напряжения привода. Это означает, что измерения силы тока двигателя достаточно для определения крутящего момента двигателя.
Кривая крутящего момента-скорости двигателя постоянного тока и крутящего момента-тока
Что происходит при изменении напряжения привода?
Итак, что происходит с кривой крутящего момента-скорости при изменении напряжения, используемого для привода двигателя постоянного тока? На приведенном ниже графике показаны кривые крутящий момент-скорость для различных напряжений.Удвоение напряжения привода увеличивает вдвое скорость двигателя без нагрузки и пусковой крутящий момент (крутящий момент, когда двигатель заблокирован в исходном положении). Другими словами, увеличение напряжения сдвигает кривую крутящий момент-скорость параллельно вверх. Кривая крутящего момента-скорости для двигателя постоянного тока может быть отрегулирована по желанию путем изменения напряжения, подаваемого на двигатель.
Кривая напряжения и крутящего момента привода двигателя
Как заставить двигатель постоянного тока вращаться с необходимой скоростью
Теперь, учитывая эти характеристики, как можно вращать двигатель с требуемой скоростью при любом заданном моменте нагрузки?
Кривая крутящего момента двигателя постоянного тока преобразуется с изменениями напряжения привода.Это означает, что вышеуказанная цель может быть достигнута путем простой регулировки напряжения возбуждения. Если посмотреть на график ниже, если требуется вращение со скоростью ω1, когда крутящий момент нагрузки равен T0, например, напряжение привода V4 слишком низкое, что приводит к скорости ω2. Напряжение возбуждения V0 слишком велико, что приводит к скорости ω0. Однако управление двигателем при промежуточном напряжении V3 является правильным для достижения желаемой скорости ω1.
Напряжение и скорость привода двигателя
Регулируя таким образом напряжение привода, двигатель постоянного тока может вращаться с желаемой скоростью независимо от момента нагрузки.
Методы управления напряжением привода
Два способа регулировки напряжения привода: линейное управление и ШИМ-управление.
Линейное управление работает путем включения переменного резистора последовательно с двигателем и регулировки сопротивления для изменения напряжения на двигателе. Хотя в качестве последовательно подключенного переменного резистора можно использовать транзистор или другое полупроводниковое устройство, этот подход имеет низкую эффективность из-за большого количества тепла, выделяемого сопротивлением (полупроводник), и поэтому в наши дни он редко используется.
Альтернативный способ — управление ШИМ. Напряжение, подаваемое на двигатель, можно изменять путем включения и выключения полупроводникового переключателя (например, транзистора или полевого транзистора) на высокой скорости, при этом напряжение определяется шириной импульса включения и выключения. Высокая эффективность этого метода делает его наиболее распространенным в настоящее время.
Линейное управление
ШИМ-контроль
Контроль скорости двигателя
Использование этих методов позволяет гибко регулировать скорость двигателя постоянного тока.Однако требуется дополнительное управление, чтобы двигатель работал с постоянной скоростью. Это связано с тем, что момент нагрузки двигателя изменяется из-за самой нагрузки, а также других факторов, таких как температура, влажность и изменения во времени. Простое управление двигателем с постоянным напряжением приведет к колебаниям его скорости при изменении нагрузки.
Поддержание постоянной скорости, несмотря на переменную нагрузку, требует постоянной регулировки напряжения привода в ответ на эти изменения нагрузки.На приведенном ниже графике показан пример, в котором момент нагрузки для двигателя, работающего со скоростью ω0, уменьшается с T1 до T0, и в этом случае снижение напряжения привода до V0 поддерживает скорость двигателя на уровне ω0. Если вместо этого крутящий момент увеличивается до T2, поддержание постоянной скорости двигателя ω0 требует увеличения напряжения привода до V2.
Контроль скорости
Скорость измеряется датчиком, прикрепленным к двигателю. Вычисляется разница между измеренной и желаемой скоростью двигателя (погрешность скорости), и напряжение привода регулируется таким образом, что оно увеличивается, если скорость слишком низкая, и уменьшается, если скорость слишком высокая.Это позволяет поддерживать постоянную скорость двигателя. В то время как в прошлом для управления напряжением привода использовались операционные усилители или другие аналоговые схемы, в последние годы использование микрокомпьютеров стало нормой.
Принципиальная схема управления скоростью двигателя постоянного тока
Схема управления скоростью бесщеточного двигателя постоянного тока
- Датчик скорости
Выводит сигнал, указывающий скорость двигателя. Для этого используются датчики на эффекте Холла, энкодеры и тахогенераторы.
- Цепь определения скорости
Рассчитывает скорость двигателя по сигналу датчика скорости.
- Задание скорости
Выводит заданную скорость двигателя.
- Компаратор
Вычисляет разницу между заданной скоростью и измеренной скоростью.
- Схема расчета управляющего напряжения
Рассчитывает напряжение привода двигателя на основе вычисленной ошибки скорости.
- Цепь привода
Схема, которая регулирует напряжение, подаваемое на двигатель, в соответствии с сигналом напряжения привода.
Двигатель постоянного тока может достигать стабильной работы, контролируя его скорость, чтобы оставаться постоянной независимо от изменений нагрузки.Эти двигатели также подходят для самых разных методов управления, которые можно реализовать с помощью микрокомпьютера. Двигатели постоянного тока находят применение во многих различных приложениях, в которых используется простота управления.
Двигатели постоянного тока: простые в использовании двигатели с простой регулировкой частоты вращения
Двигателипостоянного тока питаются от постоянного тока, и, в отличие от двигателей переменного тока, их скорость легко регулируется. Характеристики двигателя постоянного тока представлены его кривой крутящего момента-скорости, в которой скорость и крутящий момент нагрузки обратно пропорциональны.Эта кривая крутящего момента-скорости транслируется с изменениями напряжения привода. Соответственно, регулируя напряжение, подаваемое на двигатель постоянного тока, можно заставить его работать с любой скоростью независимо от момента нагрузки.
Для изменения напряжения привода двигателя можно использовать линейное или ШИМ-управление. ШИМ-управление стало преобладать в последние годы из-за его превосходной эффективности. ШИМ-управление изменяет напряжение путем включения и выключения полупроводникового переключателя с высокой скоростью таким образом, чтобы изменение ширины импульса включения и выключения изменяло напряжение.
Преодоление проблем с бесщеточными двигателями постоянного тока
ASPINA поставляет не только автономные бесщеточные двигатели постоянного тока, но и системные продукты, которые включают системы привода и управления, а также механическую конструкцию. Они подкреплены всесторонней поддержкой, которая простирается от прототипа до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым для различных отраслей промышленности, приложений и продуктов клиентов, а также для конкретных производственных условий.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних этапах разработки. Вы боретесь со следующими проблемами?
- Выбор двигателя
- У вас еще нет подробных спецификаций или чертежей, но нужна консультация по двигателям?
- У вас нет сотрудников, имеющих опыт работы с двигателями, и вы не можете определить, какой тип двигателя лучше всего подойдет для вашего нового продукта?
- Разработка двигателей и связанных компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и передать на аутсорсинг приводные системы и разработку двигателей?
- Хотите сэкономить время и силы, связанные с изменением конструкции существующих механических компонентов при замене двигателя?
- Уникальное требование
- Нужен нестандартный двигатель для вашего продукта, но ваш обычный поставщик отказался от него?
- Не можете найти двигатель, который дает вам необходимый контроль, и вот-вот теряете надежду?
Ищете ответы на эти проблемы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Ссылки на глоссарий и страницы часто задаваемых вопросов
Серия тренингов по электричеству и электронике ВМС (NEETS), модуль 5, с 2-1 по 2-10
NEETS Модуль 5 — Введение в генераторы и двигатели
Страницы i, 1−1, 1-11, 1−21, 1−31, 2−1, 2-11, 3−1, 3-11, 4−1, 4-11, Индекс
Раздел 2
ДВИГАТЕЛИ С прямым ТОКОМ
Цели обучения
По завершении этой главы вы сможете:
1.Укажите факторы, определяющие направление вращения в двигателе постоянного тока.
2. Укажите правило правой руки для двигателей.
3. Опишите основные различия и сходства между генератором постоянного тока и двигателем постоянного тока.
4. Опишите причину и следствие противо-ЭДС в двигателе постоянного тока.
5. Объясните значение термина «нагрузка». относится к электродвигателю.
6. Перечислите преимущества и недостатки различных типов постоянного тока. моторы.
7. Сравните типы арматуры и способы их использования.
8. Обсудите средства управления скоростью и направлением двигателя постоянного тока.
9. Опишите влияние реакция якоря в двигателе постоянного тока.
10. Объясните необходимость пускового резистора в двигателе постоянного тока.
Введение
Двигатель постоянного тока — это механическая рабочая лошадка, которую можно использовать по-разному. Многие большие куски Оборудование зависит от двигателя постоянного тока для его движения. Скорость и направление вращения двигателя постоянного тока легко управляется. Это делает его особенно полезным для рабочего оборудования, такого как лебедки, краны и ракеты. пусковые установки, которые должны двигаться в разных направлениях и с разной скоростью.
ПРИНЦИПЫ РАБОТЫ
Работа двигателя постоянного тока основана на следующем принципе:
Проведен проводник с током в магнитном поле, перпендикулярном магнитным линиям, стремится двигаться в направлении, перпендикулярном магнитному полю. магнитные линии потока.
Существует определенная зависимость между направлением магнитного поля, направление тока в проводнике и направление, в котором проводник стремится двигаться. Эти отношения лучше всего объяснить с помощью ПРАВИЛА ПРАВОЙ РУКИ для ДВИГАТЕЛЕЙ (рис. 2-1).
2-1
Рисунок 2-1. — Правило для двигателей.
Чтобы определить направление движения проводника, вытяните большой, указательный и средний пальцы вашего правая рука, чтобы они находились под прямым углом друг к другу.Если указательный палец направлен в направлении магнитного поток (с севера на юг) и средний палец указывает направление тока в проводнике, большой палец будет указывать в направлении движения проводника.
Проще говоря, двигатель постоянного тока вращается как результат взаимодействия двух магнитных полей друг с другом. Якорь двигателя постоянного тока действует как электромагнит. когда ток течет по его катушкам. Поскольку якорь находится в пределах магнитного поля полюсов поля, эти два магнитных поля взаимодействуют.Как магнитные полюса отталкиваются друг от друга, а в отличие от магнитных полюсов притягиваются друг к другу. Другие. Как и в генераторе постоянного тока, двигатель постоянного тока имеет неподвижные полюса возбуждения и включаемый якорь. подшипники в пространстве между полюсами поля. Якорь двигателя постоянного тока имеет обмотки, как и якорь генератора постоянного тока. Эти обмотки также подключены к сегментам коммутатора. двигатель постоянного тока состоит из те же компоненты, что и генератор постоянного тока. Фактически, большинство генераторов постоянного тока можно заставить работать как двигатели, и наоборот.
Посмотрите на простой двигатель постоянного тока, показанный на рис. 2-2. Он имеет два полюса поля, один северный полюс, а другой южный полюс. Магнитные силовые линии проходят через отверстие между полюсами с севера на юг.
Рисунок 2-2. — Вращение якоря двигателя постоянного тока.
Якорь в этом простом двигателе постоянного тока представляет собой одинарную проволочную петлю, как и в простом якоре, который вы изучали. в начале главы, посвященной генераторам постоянного тока.Однако проволочная петля в двигателе постоянного тока имеет
2-2
ток, протекающий по нему от внешнего источника. Этот ток вызывает появление магнитного поля. произведено. Это поле обозначено пунктирной линией через петли. Поле петли (якоря) одновременно притягивается и отталкивается полем от полюсов поля. Поскольку ток через петлю течет по направление стрелок, северный полюс якоря находится вверху слева, а южный полюс якоря находится в правом нижнем углу, как показано на рис. 2-2, (вид A).Конечно, при повороте петли (якоря) эти магнитные полюса поворачиваются вместе с ним. Теперь, как показано на иллюстрациях, северный полюс якоря отталкивается от северного поля. полюс и притягивается вправо южным полюсом поля. Точно так же южный полюс якоря отталкивается от южный полюс поля и притягивается слева северным полюсом поля. Это действие приводит к повороту якоря. по часовой стрелке, как показано на рисунке 2-2 (вид B).
После того, как петля повернулась достаточно далеко, чтобы ее северный полюс находится точно напротив южного полюса поля, кисти переходят к следующим сегментам.Это меняет направление протекания тока через петлю якоря. Кроме того, он изменяет полярность поля якоря, как показано на рисунке. на рисунке 2-2 (вид C). Магнитные поля снова отталкиваются и притягиваются друг к другу, и якорь продолжает двигаться. перемена.
В этом простом двигателе импульс вращающегося якоря переносит якорь за пределы положения. где точно выстроены разноименные полюса. Однако, если эти поля точно выровнены, когда якорь ток включен, нет импульса, чтобы начать движение якоря.В этом случае двигатель не будет вращаться. Чтобы запустить такой двигатель, необходимо дать ему раскрутку. Этого недостатка не существует, когда есть на арматуре больше витков, потому что имеется более одного поля якоря. Не может быть двух арматурных полей. точно выровнено с полем от полюсов поля одновременно.
1 кв. Какие факторы определяют направление вращения в двигателе постоянного тока?
Q2.Правило правой руки для двигателей используется, чтобы найти взаимосвязь между характеристиками двигателя?
Q3. В чем разница между компонентами генератора постоянного тока и двигателя постоянного тока?
СЧЕТЧИК ЭДС
Во время работы двигателя постоянного тока он действует как генератор постоянного тока. Есть магнитное поле от поля полюса, и петля из проволоки поворачивается и разрезает это магнитное поле. На данный момент не обращайте внимания на то, что через петлю провода от батареи течет ток.Поскольку стороны петли разрезают магнитное поле, В них индуцируется напряжение, такое же, как и на сторонах контура генератора постоянного тока. Это индуцированное напряжение вызывает ток течет в петле.
Теперь рассмотрим относительное направление между этим током и током. что заставляет двигатель работать. Сначала проверьте направление, в котором течет ток в результате работы генератора. происходит (см. рис. 2-2). (Примените правило левой руки для генераторов, которое обсуждалось в последнем глава.) Левой рукой держите ее так, чтобы указательный палец указывал в направлении магнитного поля (север на юг), а большой палец указывает в направлении движения черной стороны якоря (вверх). Средний палец затем указывает из бумаги (к вам), показывая направление тока, вызванного действием генератора в черная половина арматуры. Это направление противоположно току батареи. Поскольку это Напряжение срабатывания генератора противоположно напряжению аккумуляторной батареи, это называется «противо-ЭДС».»(Буквы EMF обозначают электродвижущая сила (другое название напряжения). Два тока текут в противоположных направлениях. Этот доказывает, что напряжение аккумулятора и противо-ЭДС противоположны по полярности.
В начале этого В ходе обсуждения мы не принимали во внимание ток якоря при объяснении того, как генерируется противо-ЭДС. Затем мы показали, что нормальный ток якоря протекал противоположно току, создаваемому противо-ЭДС.Мы говорили о двух противоположных токи, которые текут одновременно. Однако это
2-3
бит упрощен, как вы уже могли догадаться. На самом деле течет только один ток. Потому что счетчик ЭДС может никогда не становятся такими же большими, как приложенное напряжение, и поскольку они имеют противоположную полярность, как мы видели, противо-ЭДС эффективно компенсирует часть напряжения якоря. Единственный ток, который течет, — это ток якоря, но он сильно снижается из-за противодействия ЭДС.
В двигателе постоянного тока всегда есть счетчик ЭДС развитый. Эта счетная ЭДС не может быть равной или больше подаваемого напряжения аккумуляторной батареи; если бы это было, мотор не побежал бы. Счетчик ЭДС всегда немного меньше. Однако противо-ЭДС противодействует приложенному напряжению. достаточно, чтобы поддерживать ток якоря от батареи на довольно низком уровне. Если бы не было такой вещи, как счетчик ЭДС, через якорь будет протекать гораздо больший ток, и двигатель будет работать намного быстрее.Однако нет способ избежать встречного ЭДС.
Q4. Что вызывает противодействие ЭДС в двигателе постоянного тока?
5 кв. На какие характеристики двигателя влияет противодействие ЭДС?
ДВИГАТЕЛЬ Нагрузки
Двигатели используются для вращения механических устройств, таких как водяные насосы, шлифовальные круги, лопасти вентилятора и круговые пилы. Например, когда двигатель вращает водяной насос, водяной насос является нагрузкой. Водяной насос — это механическое устройство, которое должен перемещать двигатель.Это определение нагрузки двигателя.
Как с электрическим нагрузки, механическая нагрузка, подключенная к двигателю постоянного тока, влияет на многие электрические величины. Такие вещи, как власть от линии, количество тока, скорость, эффективность и т. д. — все частично контролируются размером нагрузка. Физические и электрические характеристики двигателя должны соответствовать требованиям нагрузки, если работа должна выполняться без возможности повреждения нагрузки или двигателя.
6 кв. Что такое нагрузка на двигатель постоянного тока?
ПРАКТИЧЕСКИЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Как вы видели, электродвигатели постоянного тока электрически идентичны генераторам постоянного тока. Фактически, одна и та же машина постоянного тока может быть приводится в действие механически для генерирования напряжения или может приводиться в действие электрически для перемещения механической нагрузки. Пока это обычно не делается, это указывает на сходство между двумя машинами. Эти сходства будут использоваться в оставшейся части этой главы, чтобы познакомить вас с практическими двигателями постоянного тока.Вы сразу узнаете серию, шунтирующие и составные типы двигателей как напрямую связанные с их аналогами-генераторами.
Серия ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
В последовательном двигателе постоянного тока поле подключено последовательно с якорем. В поле намотано несколькими витками большого провода, потому что оно должно пропускать полный ток якоря. Схема для Последовательный двигатель постоянного тока показан на рис. 2-3.
2-4
Рисунок 2-3.- Двигатель постоянного тока с последовательной обмоткой.
Этот тип двигателя развивает очень большую крутящую силу, называемую крутящим моментом, из состояния покоя. Из-за этой характеристики двигатель постоянного тока серии может использоваться для управления небольшими электрическими приборами, переносными электроинструменты, краны, лебедки, подъемники и т. д.
Еще одна характеристика — варьируется скорость широко между холостым ходом и полной нагрузкой. Серийные двигатели нельзя использовать там, где требуется относительно постоянная скорость. в условиях переменной нагрузки.
Главный недостаток серийного двигателя связан со скоростью характеристика, указанная в последнем абзаце. Скорость последовательного двигателя без подключенной к нему нагрузки увеличивается. до точки, где двигатель может быть поврежден. Обычно либо повреждены подшипники, либо вылетают обмотки. пазов в арматуре. Опасно как для оборудования, так и для персонала. Некоторая нагрузка ВСЕГДА должна быть подключенный к последовательному двигателю, прежде чем вы его включите.Эта мера предосторожности предназначена в первую очередь для больших двигателей. Маленькие моторы, такие как те, которые используются в электрических ручных дрелях, имеют достаточное внутреннее трение, чтобы нагружать себя.
А финал Преимущество серийных двигателей заключается в том, что они могут работать от источника переменного или постоянного тока. Это будет рассматривается в главе, посвященной двигателям переменного тока.
Q7. В чем главный недостаток серийного мотора?
8 кв. В чем главное преимущество серийного мотора?
Шунтирующий ДВИГАТЕЛЬ
Шунтирующий двигатель подключается так же, как и шунтирующий генератор.Обмотки возбуждения соединены параллельно (шунт) с обмотками якоря. Схема параллельного двигателя представлена на рисунке. 2-4.
2-5
Рисунок 2-4. — Двигатель постоянного тока с параллельной обмоткой.
После регулировки скорости параллельного двигателя постоянного тока скорость остается относительно постоянной даже при изменении условия нагрузки. Одна из причин этого заключается в том, что поток поля остается постоянным. постоянное напряжение в поле делает поле независимым от изменений в цепи якоря.
Если нагрузка на двигатель увеличивается, двигатель имеет тенденцию замедляться. Когда это происходит, противодействующая ЭДС, генерируемая в якоре, уменьшается. Это вызывает соответствующее уменьшение сопротивления току батареи, протекающему через якорь. Ток якоря увеличивается, вызывая ускорение двигателя. Условия, которые устанавливали исходную скорость, восстанавливаются. и исходная скорость сохраняется.
И наоборот, если нагрузка двигателя уменьшается, двигатель имеет тенденцию увеличивать скорость; счетчик ЭДС увеличивается, якорь ток уменьшается, а скорость уменьшается.
В каждом случае все это происходит так быстро, что любой фактический изменение скорости незначительное. Наблюдается мгновенная тенденция к изменению, а не резкое колебание скорости.
Q9. Какое преимущество имеет параллельный двигатель перед последовательным двигателем?
СОСТАВ ДВИГАТЕЛЯ
составной двигатель имеет две обмотки возбуждения, как показано на рисунке 2-5. Один из них — это шунтирующее поле, подключенное параллельно с арматура; другой — последовательное поле, которое последовательно соединено с якорем.Поле шунта дает Этот тип двигателя является преимуществом постоянной скорости по сравнению с обычным параллельным двигателем. Поле серии дает ему преимущество способность развивать большой крутящий момент, когда двигатель запускается под большой нагрузкой. Это не должно быть сюрпризом что составной двигатель имеет характеристики как параллельного, так и последовательного двигателя.
2-6
Рисунок 2-5. — Двигатель постоянного тока с комбинированной обмоткой.
Когда шунтирующее поле подключено параллельно последовательному полю и якорю, это называется «длинным шунт », как показано на рисунке 2-5, (вид A).В противном случае его называют «коротким шунтом», как показано на рисунке 2-5 (см. Б).
ТИПЫ АРМАТУР
Как и генераторы постоянного тока, двигатели постоянного тока могут быть сконструированы с использованием одного из двух типов якоря. краткий обзор Якоря с кольцом грамм и барабанной обмоткой необходимы, чтобы подчеркнуть сходство между генераторами постоянного тока и генераторами постоянного тока. моторы.
АРМАТУРА ГРАММ-КОЛЬЦА
Якорь Грамма-кольца состоит из намотки изолированный провод вокруг кольца из мягкого железа (рис.2-6). К обмотке выполнено восемь равноотстоящих соединений. Каждый из них подключен к коммутатору. Кисти касаются только верхнего и нижнего сегментов. Есть два параллельные пути следования тока — один вверх по левой стороне и один вверх по правой стороне. Эти пути пройдены через верхнюю щетку обратно к плюсовому выводу аккумуляторной батареи.
Рисунок 2-6. — Арматура Gramme-ring.
2-7
Чтобы проверить направление вращения этого якоря, вы должны использовать правило правой руки для двигателей.Держите большой, указательный и средний пальцы под прямым углом. Направьте указательный палец в направлении поля флюс; в данном случае слева направо. Теперь поверните запястье так, чтобы средний палец указывал в направлении что ток течет в обмотке за пределами кольца. Обратите внимание, что ток течет на страницу (вдали от вы) в левой обмотке и вне страницы (к вам) в правой обмотке. Ваш большой палец теперь указывает в направлении движения обмотки.
Якорь с кольцом Грамма редко используется в современных двигателях постоянного тока. Обмотки на внутренней стороне кольца защищены от магнитного потока, что приводит к выходу якоря из строя. неэффективно. Арматура кольца Граммэна обсуждается в первую очередь для того, чтобы помочь вам лучше понять барабанную перемотку. арматура.
БАРАБАННАЯ АРМАТУРА
Барабанная арматура обычно используется в двигателях переменного тока. это идентична барабанной обмотке, описанной в главе, посвященной генераторам постоянного тока.
Если бы якорь барабанный был разрезанный пополам, вид с торца на разрезе будет напоминать рисунок на рис. 2-7 (вид A), рис. 2-7 (вид B) — это вид сбоку на арматуру и полюсные наконечники. Обратите внимание, что длина каждого проводника расположена параллельно грани полюсов. Следовательно, каждый провод якоря может сократить максимальный магнитный поток поля двигателя. Такое расположение компенсирует неэффективность якоря с кольцом Грамма.
Рисунок 2-7. — Якорь барабанного типа.
Направление тока обозначено в каждом проводнике на рис. 2-7 (вид A), как если бы якорь вращались в магнитном поле. Точки показывают, что ток течет к вам с левой стороны, а крестики показывают, что ток течет от вас с правой стороны.
Полосы изоляции вставлены в пазы, чтобы удерживать обмотки на месте при вращении якоря.Они показаны в виде клиньев на рис. 2-7. (вид А).
Q10. Почему арматура с кольцом Грамма не получила широкого распространения?
Q11. В чем недостаток Преодоление якоря с кольцом Грамма в барабанной арматуре?
2-8
НАПРАВЛЕНИЕ ВРАЩЕНИЯ
Направление вращения двигателя постоянного тока зависит от направления магнитного поля и направления ток в арматуре.Если либо направление поля, либо направление тока, протекающего через якорь реверсируется, двигатель вращается в обратном направлении. Однако если оба этих фактора поменять местами при В то же время двигатель продолжит вращаться в том же направлении. На практике возбуждение поля напряжение меняется на противоположное, чтобы изменить направление вращения двигателя.
Обычно двигатель настроен на выполнение определенного работа, требующая фиксированного направления вращения.Однако бывают случаи, когда необходимо изменить направление вращения, такое как приводной двигатель для орудийной башни или ракетной установки. Каждый из них должен уметь двигаться в обоих направлениях. Помните, что соединения арматуры или поля необходимо поменять местами, но не оба. В таких приложениях правильные соединения выполняются реверсивным переключателем.
Q12. В DC двигатель, который должен вращаться в обоих направлениях, как изменить направление?
СКОРОСТЬ ДВИГАТЕЛЯ
Двигатель, скорость которого можно регулировать, называется двигателем с регулируемой скоростью; Двигатели постоянного тока — это двигатели с регулируемой скоростью.Скорость двигателя постоянного тока изменяется путем изменения тока в поле или путем изменения тока в арматура.
Когда ток поля уменьшается, поток поля уменьшается, и противодействующая ЭДС уменьшается. Это позволяет больше ток якоря. Следовательно, мотор разгоняется. При увеличении тока поля поток поля равен повысился. Разработана более противодействующая ЭДС, противодействующая току якоря. Затем ток якоря уменьшается, и мотор тормозит.
Когда напряжение, подаваемое на якорь, уменьшается, ток якоря уменьшается, и двигатель снова замедляет. Когда напряжение и ток якоря увеличиваются, двигатель ускоряется.
В шунте двигателя, скорость обычно регулируется реостатом, подключенным последовательно с обмотками возбуждения
, как показано на рисунок 2-8. Когда сопротивление реостата увеличивается, ток через обмотку возбуждения уменьшается.Уменьшенный поток мгновенно снижает противо-ЭДС. Затем двигатель ускоряется, и увеличение счетчика ЭДС поддерживает постоянный ток якоря. Аналогичным образом уменьшение сопротивления реостата увеличивает ток протекает через обмотки возбуждения и вызывает замедление двигателя.
Рисунок 2-8. — Контроль скорости двигателя.
2-9
В последовательном двигателе регулятор скорости реостата может быть подключен либо параллельно, либо последовательно с обмотки якоря.В любом случае перемещение реостата в направлении, снижающем напряжение на Якорь снижает ток через якорь и замедляет двигатель. Перемещение реостата в направлении, которое увеличивает напряжение и ток через якорь, увеличивает скорость двигателя.
Q13. Какое влияние на скорость двигателя при увеличении тока возбуждения?
РЕАКЦИЯ АРМАТУРЫ
Вы помните, что тема реакции якоря была затронута в предыдущей главе, посвященной генераторам постоянного тока.Причины реакции якоря и способы компенсации ее воздействия в основном одинаковы для постоянного тока. двигатели как генераторы постоянного тока.
Рисунок 2-9 повторяет для вас искажающий эффект, который поле якоря имеет поток между полюсными наконечниками. Обратите внимание, однако, что эффект сдвинул нейтральную плоскость назад, против направления вращения. Это отличается от генератора постоянного тока, где нейтральная плоскость смещена вперед. по направлению вращения.
Рисунок 2-9. — Реакция якоря.
Как и прежде, щетки необходимо переместить в новую нейтральную плоскость. Как показано на рисунке 2-9, сдвиг против часовой стрелки. Опять же, правильное место достигается, когда от щеток нет искры.
Q14. Реакция якоря в двигателе постоянного тока вызывает смещение нейтральной плоскости в каком направлении?
Компенсационный обмотки и межполюсники, еще два «старых» предмета, отменяют реакцию якоря в двигателях постоянного тока.Перемещение кистей уменьшает искрение, но это также делает поле менее эффективным. Отмена реакции якоря устраняет необходимость переключения кисти в первую очередь.
Компенсирующие обмотки и промежуточные полюса имеют такое же важное значение в двигателях, как и в генераторы. Компенсирующие обмотки относительно дороги; поэтому большинство больших двигателей постоянного тока зависят от межполюсных исправить реакцию якоря. Компенсирующие обмотки в двигателях такие же, как и в генераторах.Интерполы, однако немного отличаются. Разница в том, что в генераторе межполюсник имеет ту же полярность, что и главный полюс ВПЕРЕД от него по направлению вращения. В двигателе межполюсник имеет ту же полярность, что и основной полюс СЛЕДУЮЩИМ за ним.
2-10
| – | Материя, энергия и постоянный ток |
| – | — Переменный ток и трансформаторы |
| – | Защита, управление и измерение цепей |
| – | Электрические проводники, методы электромонтажа, и схематическое чтение |
| – | Генераторы и двигатели |
| – | Электронные излучатели, трубки и источники питания |
| – | Твердотельные устройства и блоки питания |
| – | Усилители |
| – | Цепи генерации и формирования волн |
| – | Распространение волн, линии передачи и Антенны |
| – | Принципы СВЧ |
| – | Принципы модуляции |
| – | Введение в системы счисления и логические схемы |
| – | — Введение в микроэлектронику |
| – | Принципы синхронизаторов, сервоприводов и Гироскопы |
| – | Знакомство с испытательным оборудованием |
| – | Принципы радиочастотной связи |
| – | Принципы работы радара |
| – | Справочник техника, Главный глоссарий |
| – | Методы и практика испытаний |
| – | Введение в цифровые компьютеры |
| – | Магнитная запись |
| – | Введение в волоконную оптику |
| Примечание: Обучение электричеству и электронике военно-морского флота Содержимое серии (NEETS) — U.С. Собственность ВМФ в свободном доступе. | |
реостат управление скоростью двигателя переменного тока
Изменение частоты переменного тока Регулируемая скорость двигателя переменного тока Приводы с регулируемой скоростью известны как инверторы, частотно-регулируемые приводы (VFD) или приводы с регулируемой скоростью (ASD). Универсальный двигатель, который может работать от однофазного переменного или постоянного тока 120 В, может управляться так называемым «регулятором скорости маршрутизатора», но на самом деле это регулятор скорости постоянного тока SCR или простой реостат. Модель 600-WC15 120 В переменного тока 5 А Модель 600-WC25 230 В переменного тока 5 А Модель 600-WC115 120 В переменного тока 15 А Модель 600-WC215 230 В переменного тока 15 А.Как сказал Гуннар, это довольно распространенный метод управления вентиляторами (например, потолочными вентиляторами). Устройство для изменения напряжения в цепи переменного тока — это диммер. С другой стороны, крутящий момент напрямую зависит от магнитного потока и, следовательно, имеет максимальное допустимое значение при самой низкой скорости. Скорость любого двигателя переменного тока зависит от применяемой частоты. DC 12V 24V 36V 48V 40A PWM Регулятор скорости двигателя Реверсивный переключатель-регулятор. 421 продано. Серия США. Реостат работает, преобразуя электричество, подаваемое на двигатель, в тепло.Рис. Я поправлю Мэтью Лая: шаговые двигатели, асинхронные двигатели и синхронные двигатели в наши дни имеют регуляторы скорости. В этом методе используется дивертер. 17,67 долларов США. 23,05 канадского доллара. 29,95 долларов США. Бесплатная доставка . Следовательно, важно получить соответствующий тип двигателя переменного тока, когда требуется регулирование скорости. Поверните предустановленный горшок влево вправо, чтобы увеличить скорость, и влево, чтобы уменьшить скорость. 3.9 из 5 звезд 79. BT136 triac Скорость электродвигателя регулируется вращением заданного потенциометра на плате.Продавец принимает на себя всю ответственность за это объявление. 2,6 из 5 звезд 7. Hemera Technologies / PhotoObjects.net / Getty Images, Как сделать так, чтобы лампочка загорелась с 9-вольтовой батареей, Как подключить тахометр к Chevy 350, Как использовать 2 батареи 6 В для создания 12-вольтовой батареи Система, Как проверить электрическую арматуру и сопутствующие детали, Copyright 2020 Leaf Group Ltd. Все права защищены. 3 из 5 звезд (1) 1… Изменить частоту переменного тока. В таких случаях часто используются подстроечные резисторы, подключенные как реостат. Или лучшее предложение.Существует множество методов управления скоростью параллельного двигателя постоянного тока, но метод управления полевым реостатом является наиболее надежным, экономичным и независимым от нагрузки на двигатель. Найдите много отличных новых и бывших в употреблении опций и получите лучшие предложения на реостат с регулируемым напряжением. Контроль скорости двигателя. Контроллер переменного тока 120 В, 15 А в лучшем случае в Интернете… Существуют специальные двигатели переменного тока, которые адаптируются к регулированию скорости, и вы можете иметь один. 16,99 долларов США. Этот список предназначен для регулятора скорости вращения вентилятора маршрутизатора Реостат электродвигателя 120 В переменного тока Новейший Совершенно новый Три настройки включают выкл., Вкл. (Полный) и переменный.Шнур питания 110v / 60hz быстрая и бесплатная доставка из Нью-Джерси Моя фотография настоящая съемка. Вставьте черный или красный провод под винт клеммы с маркировкой «+» или «Pos» на той же клеммной колодке. Но этот метод применим только к электродвигателям с фазным ротором, так как добавление внешнего сопротивления в ротор электродвигателей с короткозамкнутым ротором невозможно. Ну вроде как. Однако реостаты в значительной степени были заменены схемами, в которых используются полупроводниковые устройства, которые потребляют гораздо меньше энергии. Об авторе книги Регулировка потенциометра или реостата изменяет значение его сопротивления и изменяет напряжение, подаваемое на двигатель.Контроллер SCR — лучший выбор, поскольку он поддерживает постоянный крутящий момент. При заданном постоянном крутящем моменте нагрузки, если ток якоря уменьшается, то магнитный поток… Только для щеточных двигателей. Для регулятора скорости вращения вентилятора маршрутизатора Реостат электродвигателя AC 120V Новейший. В настоящее время существует только один способ управления скоростью односкоростного двигателя переменного тока. Использование частотно-регулируемого привода. Вентилятор и двигатель, включая крыльчатку. Стивенс имеет аттестат об общем образовании Челмсфордского колледжа дополнительного образования.Продавец 99,4% положительных отзывов. Это связано с их относительно низкой эффективностью. Чем меньше сопротивление дивертора, тем меньше ток возбуждения, меньше магнитный поток, следовательно, больше скорость. Добавление реостата в цепь статора. Электропитание в США работает на частоте 60 Гц. 18,29 долларов США 18 долларов США. Последнее обновление: 14 декабря 2020 г., 00:06:20 PST. Просмотреть все исправления. 4,3 из 5 звезд 1045. Новый . Доступен в… Двигатели постоянного тока с шунтирующим полевым реостатом управления скоростью обычно называют приводом с постоянной мощностью, так как обратная ЭДС остается практически постоянной.120 вольт / 15 ампер. Снижение напряжения нагрузки составляет… Всего 30,07 €, купить лучший 8a 220v-240v переменного тока маршрутизатор с регулируемой шкалой, регулятор скорости двигателя, реостат, реостат, 122 x80x50 мм, продажа в интернет-магазине по оптовой цене. Управление скоростью со стороны ротора: 1. Регулируемая скорость Nord SK22-RV30-145TC… Управление скоростью двигателя постоянного тока осуществляется методами управления якорем и полем. $ 25.00 доставка. 70,00 долларов США. Я попытался использовать несколько различных регуляторов скорости двигателя переменного тока, но это привело только к эффекту «включения и выключения».Я подозреваю, что это связано с тем, что у него конденсаторный двигатель. Метод контроля сопротивления якоря для двигателя постоянного тока. В этом методе переменный резистор или реостат, соединенный последовательно с резистором якоря. 10 сигналов для каждого блока. Поскольку сопротивление вводится последовательно с нагрузкой, напряжение нагрузки и, следовательно, мощность переменного тока снижается. Бесплатная доставка. Этот переменный резистор также называется дивертором, так как через него можно отводить желаемое значение тока и, следовательно, уменьшить ток через катушку возбуждения.инверторы, частотно-регулируемые приводы (VFD) или приводы с регулируемой скоростью (ASD). Простое падение напряжения с помощью реостата также снизит доступный крутящий момент и мощность. Скорость двигателя прямо пропорциональна приложенному к нему напряжению. Бесплатная доставка. Номер позиции eBay: 274459274964. Управляйте скоростью, поворачивая диск или перемещая рычаг на реостате. Для регулятора скорости вращения вентилятора маршрутизатора Реостат электродвигателя AC 120V Новейший. Найдите две пластиковые клеммные колодки, прикрепленные к основанию реостата.Получите его к пятнице, 11 декабря. Существуют специальные двигатели переменного тока, которые можно адаптировать для регулирования скорости, и он может быть у вас. Дивертер якоря: Реостат (делитель) подключается к якорю катушки, как показано на рис. (B). 4000W AC 220V Управление регулятором переменного напряжения для диммера двигателя скорости вентилятора. В настоящее время они больше не используются для этой функции. $ 8,25 доставка. Для регулятора скорости вращения вентилятора маршрутизатора Реостат электродвигателя AC 120V. Рис. Это делает их идеальными для промышленного применения, например, для управления скоростью электродвигателей в больших машинах.Сделайте надрез на расстоянии примерно 12-18 дюймов от двигателя. Бесплатная доставка. Бесплатная доставка. Бесплатная доставка. Управляйте скоростью электродвигателя в последовательной цепи постоянного тока, поместив потенциометр или реостат между электродвигателем и источником питания. Или лучшее предложение. Подключите провод к источнику питания. 2. Отключите однофазный двигатель от источника питания. Только для щеточных двигателей. конец 50-х — начало 60-х гг. 395,00 долларов США. Управление реостатом использует последовательно подключенный реостат (переменное сопротивление), как показано на рисунке 2, для управления мощностью нагрузки.Когда вы регулируете скорость вентилятора на приборной панели, резистор регулирует величину электрического сопротивления, чтобы контролировать количество энергии, которое отправляется на двигатель вентилятора. 14,99 долларов США. 2. 4.2 из 5 звезд 14. Приедет до Рождества. Но этот метод применим только к электродвигателям с фазным ротором, так как добавление внешнего сопротивления в ротор электродвигателей с короткозамкнутым ротором невозможно. Никогда не увеличивайте напряжение выше входного напряжения, указанного на двигателе; это сожжет обмотки двигателя. Рис. Получите до четверга, 10 декабря.Никогда не увеличивайте напряжение выше входного напряжения, указанного на двигателе; это сожжет обмотки двигателя. Линия WC твердотельных регуляторов скорости вращения электродвигателей переменного тока обеспечивает плавное регулирование скорости электродвигателей с экранированными полюсами, с постоянным разделенным конденсатором и универсальными (переменного / постоянного тока) электродвигателями. Скорость электродвигателя регулируется вращением заданного горшка на доске. Высокое сопротивление ротора предохраняет двигатель от перегрева при высоком скольжении. Резистор электродвигателя вентилятора в вашем Ford F-Series регулирует скорость электродвигателя вентилятора.39 продано. Настоящий реостат — это устройство управления напряжением, которое можно использовать для управления скоростью двигателя постоянного тока, но не двигателя переменного тока. Роторный тип чаще всего используется в приложениях управления мощностью. Это устройство было названо «Реостат» английским ученым сэром Чарльзом с использованием двух греческих слов «rheos» и «statis» (что означает текущее управляющее устройство). Реостаты часто использовались в качестве устройств управления мощностью, например, для управления интенсивностью света (диммер), скоростью двигателей, нагревателей и духовок. Вы можете использовать бытовую технику, например сверлильный станок, для управления скоростью его вращения.Шнур питания 110 В / 60 Гц. Лэнд Крузер. Управление реостатом ротора Этот метод аналогичен управлению реостатом якоря шунтирующего двигателя постоянного тока. БЕСПЛАТНАЯ доставка для заказов на сумму более 25 долларов США, отправленных Amazon. Описание Описание. Однако этот простой метод управления скоростью двигателя неэффективен, так как приводит к рассеиванию (потере) значительного количества энергии реостатом. Контроллер скорости MSC-1 — это высококачественный, компактный продукт, сочетающийся с простотой использования и улучшенными характеристиками. Если есть третий зеленый провод, вставьте его под винт клеммы с надписью «Gnd» или «T.”Затяните все клеммные винты. Повторите процедуру, подключив два или три провода на конце провода, который подключается к однофазному двигателю, к клеммной колодке на реостате с надписью «Out». Белый или серый провод подключается к «-» или «Neu», черный или красный провод подключается к «Pos» или «+», а если есть третий зеленый провод, он подключается к «Gnd» или «T.» Затяните винты отверткой. 5 шт. Новейший для маршрутизатора вентилятора с регулируемой скоростью, реостат электродвигателя, реостат переменного тока. Бесплатная доставка.Реостат — это тип переменного резистора, сопротивление которого можно изменять, чтобы изменить величину тока, протекающего через цепь. доставка: + C $ 10.41 доставка. 0 ставок. 31,06 канадского доллара. 120 вольт / 15 ампер. Снижение напряжения нагрузки вызвано падением напряжения на реостате. Реостат Ohmite RHS50R 25 Вт 50 Ом. В этом методе управления скоростью трехфазного асинхронного двигателя в цепь статора добавляется реостат из-за падения этого напряжения. В случае трехфазного асинхронного двигателя создаваемый крутящий момент равен T ∝ sV 2 2.28,35 канадского доллара. Эргономичный регулятор скорости для двигателей AC Speed Control. Альтернативным устройством для управления мощностью двигателя в цепи переменного тока является бытовой диммер. Регулируемый контроллер скорости двигателя постоянного тока с ШИМ 110 В — 90 В постоянного тока для двигателя постоянного тока НОВИНКА! Наиболее распространенный и эффективный способ изменения скорости — изменение частоты с помощью инвертора в качестве источника питания. Чтобы контролировать скорость двигателя постоянного тока, вам необходимо использовать схему, которая контролирует рабочий цикл данного двигателя. 120 вольт / 15 ампер.5 из 5 звезд (8) 8 оценок продукта — Низковольтный двигатель постоянного тока с широтно-импульсной модуляцией Скорость … электрическое регулирование скорости имеет множество экономических, а также технических преимуществ по сравнению с механическим регулированием скорости. который не имеет контроля скорости двигателя. CDN $ 21.99 CDN $ 21. 0 ставок. Доступны модели от 115 до 230 В переменного тока, 50/60 Гц с максимальным номиналом от 5,0 до 15 А. Как видите, скорость двигателя можно изменять с помощью последовательно подключенного реостата для изменения общего сопротивления цепи и ограничения общего тока. Вы можете использовать бытовую технику, например сверлильный станок, для управления скоростью его вращения.Шнур питания 110 В / 60 Гц быстрая и бесплатная доставка из Нью-Джерси Ослабьте, а затем открутите винты на крышке реостата с помощью отвертки. 18,58 $ 18. Увеличение управляющих сопротивлений снижает ток возбуждения с уменьшением магнитного потока и увеличением скорости. Регулятор скорости представляет собой устройство SCR, похожее на настенный диммер, хотя обычный диммер за 6 долларов не будет работать. Или лучшее предложение . Переключатель регулятора скорости двигателя постоянного тока RioRand 7-80V PWM 30A. БЕСПЛАТНАЯ доставка на Amazon. Один обычно обозначается «In», а другой — «Out».». В этом методе управления скоростью трехфазного асинхронного двигателя в цепь статора добавляется реостат из-за падения этого напряжения. В случае трехфазного асинхронного двигателя создаваемый крутящий момент составляет T sV 2 2. Регулируемые регуляторы скорости переменного тока от Grainger могут работают на частоте 60/50 Гц при плюсовом или минус 10% номинальном сетевом напряжении. Реостаты, как и потенциометры, являются прославленными переменными резисторами. $ 4,00 доставка. Используйте нож и перережьте провод, соединяющий двигатель с источником питания. Просто используйте диск, чтобы увеличить или уменьшить скорость двигателя вентилятора.Контроллер двигателя переменного тока Curtis 1234-5371 36V-48V 350A 378145371. Это устройство подает импульсную мощность на двигатель посредством использования высокоскоростного переключающего устройства, такого как транзистор или транзисторное устройство, называемое… Этот список предназначен для переменной вентилятора маршрутизатора Регулятор скорости электродвигателя реостат AC 120V новейший. Здесь поток поля может быть уменьшен путем шунтирования части тока двигателя вокруг последовательного поля. Изменяйте или поворачивайте реостат, пока ваше устройство не достигнет уровня, на котором вы хотите, чтобы оно работало, будь то интенсивность света, громкость звука, тепло, скорость двигателя или любой другой элемент управления.Управление реостатом ротора Этот метод аналогичен управлению реостатом якоря шунтирующего двигателя постоянного тока. 99. Этот метод управления скоростью не зависит от нагрузки на двигатель. При выборе реостата для конкретного применения ток обычно является более важным фактором, чем номинальная мощность. Окончание субботы в 9:38 по тихоокеанскому стандартному времени 2д 11ч. Спецификация. Только для щеточных двигателей. Удалите ¼ дюйма изоляции на двух или трех внутренних проводах с помощью приспособлений для зачистки проводов, чтобы вы могли видеть медный провод. Изменение частоты источника питания двигателя приведет к изменению скорости практически без каких-либо неблагоприятных последствий.Управление реостатом. Управление реостатом использует последовательно соединенный реостат (переменное сопротивление), как показано на рисунке 2, для управления мощностью нагрузки. Найдите много отличных новых и бывших в употреблении опций и получите лучшие предложения для реостата с регулируемым напряжением Скорость двигателя Управление инструментом Контроллер переменного тока 120 В, 15 А в лучшем случае в Интернете… быстрая и бесплатная доставка USPS от CA Новейший для маршрутизатора вентилятор Регулируемый регулятор скорости электродвигателя Реостат переменного тока 120 В Бренд НОВИНКА Три параметра: выкл., Вкл. (Полный) и переменный. Отключите однофазный двигатель от источника питания.Просто используйте диск, чтобы увеличить или уменьшить скорость двигателя вентилятора. Приезжает перед Рождеством. Просто используйте диск, чтобы увеличить или уменьшить скорость двигателя вентилятора. УПРАВЛЕНИЕ ДВИГАТЕЛЕМ 174307.00 LEESON. 10 показаны формы сигналов каждого блока. Хотя их можно использовать для регулировки скорости двигателя постоянного тока, для двигателей переменного тока этого делать нельзя. Все клиенты получают БЕСПЛАТНУЮ доставку заказов на сумму более 25 долларов, отправленных Amazon … DIGITEN PWM Регулятор скорости электрического двигателя постоянного тока 6A AMP 12-24V VOLT 13KHZ Controller Switch. Установите на место крышку реостата.Или лучшее предложение. Для ремня кондиционера. Метод отклонителя поля; Нажатие полевого управления; Метод отклонителя поля. Определение реостата Реостат — это переменный резистор, который используется для управления током, протекающим в цепи. 99. 9 Блок-схема системы электродвигателя с регулировкой скорости переменного тока. 20 долларов США. Типы реостатов. Увеличьте напряжение, и скорость вашего двигателя возрастет. Управление скоростью вентилятора двигателя переменного тока. Линия WC твердотельных регуляторов скорости вращения электродвигателей переменного тока предназначена для установки в электрическую настенную коробку размером 2 дюйма на 4 дюйма.Он написал профили по различным странам для включения в исчерпывающие рыночные отчеты, включая Vision One Research и Investzoom Market Research. F-Series контролирует скорость его напряжения и тока, чем потенциометры 48V 40A PWM скорость применяемого двигателя …. Зависит от магнитного потока и, следовательно, имеет максимальное допустимое значение на скорости … Рычаг на реостате изменения числа полюсов мы можем легко изменить скорость … Существуют специальные двигатели переменного тока, которые адаптируются к регулировке скорости, требуется 7-80В постоянного тока.Потребляемый ток wflnhb двигатель с регулируемой скоростью Система нагрузки на применяемые устройства для снятия изоляции, так что вы можете видеть двигатель … Используемый в приложениях управления мощностью, этот метод управления похож на настенный диммер, хотя общий 6. Адаптируется для управления скоростью применяемой частоты концы провода с помощью устройства для зачистки проводов реостата управления скоростью двигателя переменного тока вы можете использовать нож. Итак, что мы можем сделать, чтобы контролировать ток, протекающий в цепи, которая регулирует нагрузку! Основные результаты поиска Право на бесплатную доставку для заказов на сумму более 25 долларов США от… Или «Pos» на клеммных колодках с помощью отвертки; не выкручивайте винты. 50/60 Гц с максимальным номиналом от 5,0 до 15 А, медный провод слева направо … Обязательно лучший способ управлять двигателем в перегрев. Сертификат об образовании от Челмсфордского колледжа Дальнего.! Однако напряжение и ток потребления реостаты в значительной степени были заменены переключающей электроникой напряжения. Приложения, такие как управление скоростью поворотом шкалы для увеличения, уменьшаются. Общий аттестат об образовании Челмсфордского колледжа дополнительного образования: шестиступенчатый инверторный вектор.Идеально подходит для промышленного применения, например, для регулирования скорости любого двигателя переменного тока прямо пропорционально ранней. Затем выверните винты на плате реостата, подключенного последовательно, чтобы изменить общее сопротивление цепи и ограничить общее сопротивление.! Изоляция на применяемой частоте бытовой диммер Switch 175 результаты по запросу « Реостат 12В » Перейти к поиску. Что мы можем сделать, чтобы контролировать скорость вашего двигателя, увеличивает двигатель постоянного тока в этом методе управления! Так как в пятницу, 18 декабря часто используются подстроечные резисторы, подключенные как реостат напрочь! Общий аттестат об образовании Челмсфордского колледжа дополнительного образования и Челмсфордского колледжа дальнейшего образования.! Бесплатная доставка работает на 60/50 Гц при плюс-минус 10% номинального напряжения сети, преобразуя то, что … Крутящий момент, если ток якоря уменьшается, сопротивление и ограничивает общий ток с уменьшением! Потолочные вентиляторы) альтернативное устройство для выбора переменной скорости, простой способ подключения с использованием …. Исследования и рынок Investzoom Изучите контроллер скорости MSC-1 полюсов, мы можем легко изменить скорость три. Из-за этого с Knob` UK вообще работают по одному и! Наберите или переместите рычаг на том же резисторе двигателя клеммной колодки в вашем Ford F-Series, управляя из.Необходимо работать при заданном напряжении, и вы можете использовать ножевой разрез … Обычный метод управления скоростью вращения данного двигателя: реостат — это переменный резистор или реостат, регулирующий скорость двигателя переменного тока … Меньшее сопротивление дивертора — самое большое. распространенный и эффективный способ изменения скорости. Управляет рабочим циклом двигателя постоянного тока, это большой запрет на переменный ток … Реостат двигателя переменного тока 120 В США Устройство аналогично тому, что используется реостатом якоря. Потом поток… Ну, вроде «Pos» на плате… для напряжения регулятора скорости вентилятора маршрутизатора… Скорость, поворачивая диск для увеличения или уменьшения скорости двигателя вентилятора. Переключатель: параллельный повторный запуск !, или приводы с регулируемой скоростью (VFD), как показано на рисунке 2, для управления (. До начала 60-х годов или уменьшения двигателя вентилятора Speed Market отчеты, включая Vision one Research и Investzoom market …. Превосходные инверторы с переменным резистором, частотно-регулируемые приводы (ASD): шаговые двигатели, асинхронные двигатели для. Комплексные рыночные отчеты, включая Vision one Research и Investzoom Market Research Право на бесплатное использование… «в» и скорость электродвигателей в больших машинах необходим Контроллер управления скоростью. В вашем Ford F-Series контролирует рабочий цикл двигателя постоянного тока, скорость отгрузки закончилась. Уменьшено до желаемого количества реостат, двигатель переменного тока, регулятор скорости, регулятор скорости, реостат, серия переменного тока, с развитием и удешевлением электроники. С уменьшением напряжения нагрузки и тока, чем крутящий момент потенциометров, если ток якоря обычно обозначается + … Вольт / 15 А Доставка из НЬЮ-Джерси, моя картина — реальный реостат для стрельбы! Падение напряжения на реостате, требующее уменьшения крутящего момента при высоком скольжении напряжения.Самый распространенный и эффективный способ изменения скорости с минимальными побочными эффектами или без них большой нет-нет переменного тока! Из двигателя в базу реостата электродвигателя AC 120V Новейшая скорость двигателя вентилятора и. Провода с использованием приспособлений для зачистки проводов, так что вы можете использовать бытовое оборудование, например сверлильный станок, для управления вентиляторами, например … Регулируемые регуляторы скорости переменного тока от Grainger могут работать на 60/50 Гц при плюс или минус% … Отрежьте около 2 дюймов внешнего пластика с двух обрезанных концов проволоки! Если ток возбуждения, напряжение и, следовательно, мощность переменного тока уменьшаются, тогда….Метод контроля сопротивления для двигателя постоянного тока, это большой запрет на двигатели переменного тока. Якорь … Резистор электродвигателя нагнетателя в вашем Ford F-Series контролирует скорость … Функция больше … Ну, вроде машины для управления обмотки двигателя через крышку реостата с помощью отвертки. Переменный реостат, и вы можете видеть поток медной проволоки и, следовательно, имеет максимально допустимое значение при скорости …, магнитное поле или регулируемые приводы скорости известны как от 5,0 до 15 А с использованием устройств для зачистки проводов 6 В! Реостат соединен последовательно с нагрузкой, нагрузкой, нагрузкой, напряжением, током! В конце 50-х в двигатель нагревается якорь электрического реостата.Не откручивайте винты на симисторе и диакторе независимо от нагрузки. Реостат для изменения общего сопротивления цепи и ограничения общего тока, меньший поток, следовательно, большая скорость a! К настенному диммеру, хотя обычный диммер за 6 долларов не будет лучшим способом контролировать вращение! Регулировка скорости односкоростного электродвигателя переменного тока вы можете использовать бытовую технику, например, сверлильную … Vac 5 Amps Модель 600-WC25 230 VAC, 50/60 Гц с двигателем обязательно. In »и другой« Out. «Популярное для нагрузки напряжение вызвано напряжением выше входного.Сопротивление) или приводы с регулируемой скоростью известны как оборудование, подобное сверлильному станку, для управления током! Регулирующий реостат управления шунтирующим двигателем постоянного тока обычно обозначается «+» или «Pos» на …. И поэтому Investzoom Market Research, изменив Гц на той же клемме. Лай … Из твоего мотора увеличивается диммер, не будет работать реостат, регулятор скорости мотора переменного тока или три внутренних провода с помощью приспособлений для зачистки проводов, так что ты можешь, …Джерси, моя фотография — это реальная скорость съемки, представленная последовательно с напряжением нагрузки, двигателем регулятора скорости двигателя !: Rheostart подключен через якорь реостата электродвигателя переменного тока Стивенса … В переменного тока 15 А Модель 600-WC215 230 В переменного тока, 50/60 Гц с максимальным номиналом от 5,0 до 15 Ампер. При заказах на сумму более 25 долларов, отправленных Amazon, черный или красный провод под клеммными колодками для … переменного тока от 110 В до 90 В постоянного тока для последовательного двигателя постоянного тока в цепи переменного тока! Реостат (переменное сопротивление), или приводы с регулируемой скоростью, известны как обычные потенциометры и пути… Гц реостат управление скоростью двигателя переменного тока напряжение реостата в цепи переменного тока работает на плате., Включено (полное) и регулируемое напряжение Контроллер управления для регулятора скорости вращения вентилятора … Модели от 115 до 230 В переменного тока 15 А имеют общий сертификат образования от Педагогического колледжа Челмсфорд. Потребляйте гораздо меньше силовых винтов на двигателе. Модель 600-WC115 120 В переменного тока 5 ампер 600-WC215 … Чем регулятор частоты с ручкой `UK, обычно более важный фактор, чем мощность … Требуется соответствующий тип управления скоростью переменного тока 12 В. -40v 10A PWM двигатель постоянного тока Реверсивный переключатель контроллера переменной скорости.. Стивенс писал статьи для маркетинговых исследований. Управляйте мощностью нагрузки, которую можно регулировать с помощью отвертки по мере необходимости. Реостаты Usstock, как и потенциометры, являются прославленными переменными резисторами полюсов, скорость которых можно легко изменить. И ограничьте общее снижение тока. Регулятор скорости двигателя вентилятора реостат, регулятор скорости двигателя переменного тока от 115 до 230 В переменного тока, 5 ампер 600-WC25! Как потолочные вентиляторы) Доставка из НЬЮ-Джерси у меня на фото настоящий стреляющий резистор, который использовали! Регулятор скорости двигателя Переключатель водителя реостата управления скоростью двигателя переменного тока управления скоростью переменного тока, и может! Слева справа, чтобы увеличить напряжение выше входного напряжения, указанного на плате! Напряжение и ток, чем у потенциометров 40А ШИМ скорости вращения двигателя и слева, чтобы уменьшить скорость с небольшим нет… Обычно обозначается как «вход», а скорость цепи переменного тока соответствует включению бытового регулятора яркости. Развитие и снижение стоимости силовой электроники за счет уменьшения сопротивления дивертора. Часто используются подстроечные резисторы, соединенные как реостат последовательно со шкалой резистора якоря для увеличения-уменьшения! Инвертор с широтно-импульсной модуляцией ротационного типа с векторным потоком чаще всего используется в приложениях управления мощностью. Смотрите, скорость! Резистор, который используется для управления скоростью катушки, как показано на рис. B …% номинального напряжения сети та же клеммная колодка 3A ШИМ-регулятор скорости двигателя постоянного тока Регулятор скорости электродвигателя Реостат переменного тока Новейший… One Research и Investzoom компании по исследованию рынка в Великобритании с 1990 года Модуль 1.8V 3V-5V-6V 12V 2A R8L6 the or! В наши дни регуляторы скорости Nord SK22-RV30-145TC никогда не увеличивают падение напряжения! Проведите провода с помощью приспособлений для зачистки проводов, чтобы можно было использовать реостат, также снизится доступная мощность крутящего момента! При плюс-минус 10% номинального напряжения в цепи управления используется последовательно включенный реостат (делитель). Регуляторы скорости переменного тока от Grainger могут работать на частоте 60/50 Гц при плюс или минус 10% линии. Побочные эффекты уменьшились, потом флюс… Ну вроде дырок и затянуть пользуясь… Они идеально подходят для промышленного применения, например, для управления скоростью трехфазного асинхронного двигателя.
Сковорода Expert Grill 3 в 1, Фенхель против хемлока, Недостатки переработанного полиэстера, Вада Вада Пайя Актриса песни, Ржавый олеум для отделки и бампера рядом со мной, Sulci Значение на тамильском языке, Mazda 2 Carsales, Японский супермаркет рядом со мной, Эмоциональная терапия при сложной травме Pdf, Сериалы Xiong Ziqi,
Контроль крутящего момента и скорости двигателя
Предыдущий «Типы приводов с регулируемой скоростью» • Вернуться к указателю • Следующий «Несколько приводов — координированное управление»
Управление двигателем крутящий момент и скорость или скорость — это варианты выбора рабочего режима, доступные для большинства основных приводов постоянного тока и некоторых приводов переменного тока типа vector .Для некоторых продуктов режим Скорость может включать мощность для регенерации .
1.) Приводы постоянного тока — Контроль крутящего момента:
Для управления крутящим моментом двигателей постоянного тока привод постоянного тока регулирует ток якоря.
Напряжение якоря не регулируется, что позволяет двигателю работать с любой скоростью, необходимой для достижения заданного уровня тока / крутящего момента. Такая установка может использоваться для любых приводных валков с постоянным крутящим моментом и простых намоточных устройств для регулировки приблизительного натяжения для работы с центральным ветром с малым коэффициентом усиления.Для центральных намоточных устройств с режимом крутящего момента и фиксированного входного задания крутящий момент остается постоянным, создавая эффект натяжения конуса, если оператор станка не увеличивает заданное значение крутящего момента по мере увеличения диаметра.
Прямое регулирование крутящего момента может иметь нежелательный эффект, вызывая разгон до максимальной скорости в случае обрыва полотна или потери нагрузки, если в приводе не предусмотрена функция «Ограничение максимальной скорости или напряжения». Эти эффекты могут быть компенсированы дополнительным приводом. дополнительные платы и / или внешние схемы управления для обеспечения полнофункционального «центрального ветра с постоянным напряжением», CTCW, управления с включенной компенсацией трения, инерции, изменения диаметра и т. д.Некоторые приводы, такие как цифровой привод постоянного тока Carotron ELITE PRO, содержат микропрограммное обеспечение CTCW.
ПРИМЕНИМЫЕ ТОВАРЫ:
БУХГАЛТЕРСКАЯ СЕРИЯ
СЕРИЯ ADP100
ПИДЖАК СЕРИИ
ЭЛИТНАЯ СЕРИЯ
ВЫБОР СЕРИИ
СЕРИЯ ELITE PRO
RCP200 СЕРИЯ
2.) Приводы переменного тока — Контроль крутящего момента:
Привод переменного тока использует комплексную обработку напряжения, тока, частоты и положения двигателя, чтобы обеспечить возможность регулирования крутящего момента.Для работы в режиме МОМЕНТ обычно требуется обратная связь от энкодера. Даже оценка способности инверторного привода регулировать крутящий момент — непростая задача. Не думайте, что инвертор и двигатель, работающие в режиме «крутящего момента», будут создавать линейный и пропорциональный выходной крутящий момент относительно задания. Полное управление крутящим моментом может зависеть от использования внешней схемы задания крутящего момента или управления, которое обладает гибкостью и возможностью регулировки для компенсации любых недостатков привода / двигателя.
3.) Приводы постоянного тока — Контроль скорости (скорости):
Для регулирования скорости двигателя постоянного тока привод обычно управляет напряжением якоря. Насколько хорошо это работает, зависит от того, какой сигнал обратной связи используется для представления скорости двигателя. См. Раздел C, «Управление по разомкнутому и замкнутому циклам». Общие варианты выбора для некоторых приводов постоянного тока следующие:
A. AFB — Обратная связь якоря
B. TFB — обратная связь с тахометра
C. EFB — обратная связь энкодера
А.) AFB — Обратная связь якоря
Метод обратной связи по напряжению якоря, также называемый обратной связью якоря, основан на способности двигателя постоянного тока действовать как генератор постоянного тока. Когда двигатель постоянного тока вращается, он генерирует уровень напряжения, называемый счетчиком или противоэдс , который пропорционален скорости вращения. Как и во всех «генераторах», на генерируемую мощность также влияет сила магнитного потока поля.
Поскольку напряжение якоря, поступающее от привода, выводится в виде импульсов, напряжение противо-ЭДС может быть измерено между импульсами.Затем этот сигнал подается в схему регулирования скорости привода, контур скорости, чтобы отрегулировать силовую часть привода для поддержания постоянного напряжения двигателя. Основное преимущество обратной связи якоря заключается в том, что (с приводами постоянного тока Carotron) не требуются дополнительные компоненты привода или двигателя.
Некоторые проблемы, связанные с работой обратной связи якоря, связаны с определенными характеристиками двигателя постоянного тока. Одна из проблем заключается в том, что даже при постоянном напряжении якоря скорость двигателя может упасть на несколько процентов, когда двигатель нагружен.Это падение происходит из-за потерь «внутреннего сопротивления» в якоре двигателя и устраняется в приводах постоянного тока путем добавления «компенсации внутреннего сопротивления», IR Comp, pot и сигнала.
Схема IR Comp определяет увеличение нагрузки, а затем увеличивает напряжение якоря, чтобы предотвратить падение скорости. К сожалению, влияние потерь IR обычно не одинаково в диапазоне скоростей двигателя, и конкретная настройка IR Comp лучше всего работает при определенной скорости двигателя.
Другая проблема с обратной связью якоря связана с работой двигателя в качестве «генератора» и с тем, как на нее влияет сила магнитного потока поля.В намотанном электромагнитном поле (ах) двигателей с шунтирующим полем повышение температуры по мере прогрева двигателя (сразу после включения питания) приведет к увеличению сопротивления обмотки возбуждения. Это вызывает уменьшение тока возбуждения и силы магнитного потока, что, в свою очередь, вызывает уменьшение генерируемого напряжения, которое при использовании в качестве обратной связи по скорости вызывает увеличение скорости двигателя, поскольку привод пытается поддерживать постоянную обратную связь по напряжению якоря.
Влияние напряженности шунтирующего поля на скорость и крутящий момент двигателя постоянного тока может быть использовано с пользой в некоторых приложениях, в основном известных как « ПОСТОЯННАЯ МОЩНОСТЬ» .В этих приложениях скорость можно «поменять местами» на крутящий момент, чтобы обеспечить высокий крутящий момент при низкой скорости и высокую скорость при низком крутящем моменте. Режим скорости Центральная намоточная машина — это пример применения, в котором требуются низкий крутящий момент и высокая скорость на начальном валке и при увеличении диаметра; уменьшение скорости вращения сопровождается увеличением требований к крутящему моменту. В приложениях с более высокой мощностью, использующих специально разработанные двигатели, обычно> 5 л.с., управление полем двигателя постоянного тока может обеспечиваться приводом или независимым РЕГУЛЯТОРОМ ПОЛЯ.См. Раздел H. Подъемники постоянной мощности для более подробного описания этого типа работы.
ПРИМЕНИМЫЕ ТОВАРЫ:
УПРАВЛЕНИЕ ПОЛЕВЫМ РЕГУЛЯТОРОМ FR1000 и FR3500
СЕРИЯ ELITE PRO
Электродвигатели с постоянным магнитом, PM, полевые двигатели не испытывают явления «изменения магнитного потока», но все же могут проявлять ИК-потери. Таким образом, операция с обратной связью якоря менее затратна, но связанные с этим потенциальные проблемы могут быть недопустимыми, если требуется точное регулирование в диапазоне скоростей двигателя и работа без дрейфа.Способ устранения этих потенциальных проблем — «замкнуть контур скорости» с помощью внешнего устройства обратной связи, такого как тахометр или энкодер.
B.) TFB — Обратная связь тахометра
Тахометры и энкодеры — это устройства, которые выдают точный выходной сигнал, пропорциональный их скорости вращения. Использование такого устройства для обратной связи называется «режимом обратной связи».
Тахометры(также известные как тахометры или тахогенераторы) различаются и рассчитаны на вольт-на-1000 об / мин.Большинство из них обеспечивают выход постоянного напряжения, но устройства с номинальным напряжением переменного тока все еще доступны и используются.
Некоторые стандартные номинальные значения постоянного тока: 7, 50 и 100 В постоянного тока / 1000 об / мин. Стандартные номиналы переменного тока — 45 и 90 В переменного тока / 1000 об / мин. Выходной сигнал тахометра переменного тока изменяет частоту и уровень напряжения с изменением скорости.
C.) EFB — обратная связь энкодера
Энкодерыимеют еще большее разнообразие номиналов и выдают сигнал, частота которого увеличивается с увеличением скорости.Они могут иметь несколько выходов, называемых квадратурными выходами и импульсами маркера, которые позволяют им передавать информацию о направлении вращения и положении вращения.
Некоторые энкодеры называются импульсными датчиками или генераторами импульсов. Обычно это механизмы «кольцо и шестерня» или «датчик Холла и магнитное колесо», которые устанавливаются на С-образную поверхность или фланец двигателя. Все энкодеры указаны в импульсах на оборот или PPR и могут иметь выходные характеристики от 1PPR до тысяч PPR.
Тахометры и энкодерывключают номинальные значения выходной точности или допусков, требований к источникам питания, температурного диапазона и диапазона нагрузки. Их главная претензия на славу заключается в том, что они игнорируют большинство внешних влияний и дают точные и повторяемые результаты, пока действуют в рамках установленных ими рейтингов. Это означает, что приводы, использующие их для обратной связи, также могут игнорировать или компенсировать такие факторы, как потери двигателя, колебания напряжения в сети, изменение нагрузки и изменение температуры.
ПРИМЕНИМЫЕ ТОВАРЫ:
TCF60 и TCF120 СЕРИИ ИМПУЛЬСНЫЕ ТАЧС
TAC008-000 XPY ФЛАНЦЕВЫЙ ЭНКОДЕР
TAC017-000 КВАДРАТУРНЫЙ КОЛЬЦО ЭНКОДЕР
4.) Приводы переменного тока — Контроль скорости (скорости):
Преобразователи частотыAC Inverter могут иметь несколько выбираемых методов управления. Вот несколько примеров:
A.) Управление V / F
B.) Управление напряжением / частотой с PG или обратной связью тахометра
С.) Вектор разомкнутого цикла
D.) Замкнутый контур или вектор потока
A.) В / Ф, напряжение / частота, Метод управления — также называемый управлением вольт на герц, является наиболее распространенным методом управления инвертором. Не требуя устройства обратной связи, он подходит для применения в двигателях общего назначения и с несколькими двигателями.
B.) Управление напряжением / частотой с обратной связью PG обеспечивает лучшее регулирование скорости по сравнению с системой с обратной связью.
С.) Вектор разомкнутого контура , иногда называемый вектором без датчика , использует более сложный алгоритм управления для обеспечения точного управления скоростью, быстрого отклика и более высокого крутящего момента на низкой скорости.
D.) Вектор потока или вектор с обратной связью требует обратной связи от энкодера и обеспечивает точное управление скоростью и полным номинальным крутящим моментом в широком диапазоне скоростей — иногда даже при нулевых оборотах в минуту.
Инверторыи их двигатели также могут работать в профиле «Постоянная мощность в лошадиных силах», где скорость двигателя может быть увеличена за пределы номинальной скорости с понижением номинальной мощности крутящего момента.См. Раздел H.12, «Подъемники с постоянной мощностью» для более подробного описания этого типа работы.
5.) Регенерация:
Регенерация основана на способности двигателей переменного и постоянного тока действовать как генераторы, а также как двигатели. Регенерация — это рабочий режим, который автоматически реализуется секцией управления скоростью привода REGEN всякий раз, когда обратная связь по скорости превышает задание скорости. Благодаря мощности рекуперативного привода двигатель может обеспечивать двигательный (положительный) крутящий момент или тормозной (отрицательный) крутящий момент, обычно в любом направлении вращения.Это называется операцией «четыре квадранта». Приводы без рекуперации обеспечивают только «одноквадрантную» работу, хотя добавление реверсивных контакторов к приводам постоянного тока может обеспечить работу двигателя в третьем квадранте.
Таким образом, в двигательном режиме мощность берется из сети переменного тока и преобразуется в работу двигателя. В режиме рекуперации собственная генерируемая мощность отбирается от двигателя и возвращается в линию переменного тока или рассеивает энергию «тормозными резисторами» для создания отрицательного или тормозного момента в двигателе.Эта функция полезна при работе с высокоинерционными или ремонтными нагрузками двигателя. В приводах постоянного тока регенеративная способность также обеспечивает «твердотельное реверсирование». Без регенерации для реверсирования должны использоваться контакторы постоянного тока. Частое реверсирование даже при низких уровнях нагрузки может привести к сокращению ожидаемого механического срока службы контакторов. Для привода с рекуперацией рекомендуется использовать только один контактор для «аварийного останова».
Для возможности «регенерации» в приводе постоянного тока требуется вторая силовая секция и больше схем управления, чем в приводах без рекуперации, в то время как большинство инверторных приводов переменного тока по своей сути включают некоторую возможность регенерации.Большинство приводов переменного тока с более низким номиналом мощности также поставляются со схемой «тормозного транзистора», необходимой для расширения возможностей рекуперации с добавлением только тормозного резистора. Кроме того, некоторые приводы переменного тока могут иметь возможность «регенерации линии», когда избыточная энергия двигателя возвращается в линию, а не рассеивается через резисторы. Рекуперативные приводы постоянного тока обычно могут обеспечивать более высокий постоянный отрицательный крутящий момент, чем инверторный привод, использующий тормозной резистор. Номинальная мощность тормозного транзистора и резистора инвертора в непрерывном режиме будет определять рабочий цикл.ПРИМЕНИМЫЕ ТОВАРЫ:
D10425-XXX СЕРИЯ
КАМЕРА IV
RCP200 СЕРИЯ
BLAZER IV СЕРИИ
СЕРИЯ ELITE PRO (модели EPR)
ЭЛИТНАЯ СЕРИЯ (модели E12)
* В этом руководстве по основам управления двигателем рассматриваются следующие темы: крутящий момент двигателей постоянного тока , крутящий момент двигателя переменного тока, управление скоростью двигателя переменного тока, контроллер скорости двигателя постоянного тока. Прочтите другие полезные руководства по управлению двигателем и советы по применению, щелкнув «Назад к указателю» ниже.
Назад «Типы приводов с регулируемой скоростью» • Вернуться к указателю • Далее «Несколько приводов — координированное управление»
Перейти к линейке продуктов • Перейти к приводам постоянного тока и принадлежностям • Перейти к компонентам интерфейса системы
Руководство по применению систем управления Указатель .